
PIN CONFIGURATION
REV. C
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
a
Voltage-to-Frequency and
Frequency-to-Voltage Converter
AD650
FEATURES
V/F Conversion to 1 MHz
Reliable Monolithic Construction
Very Low Nonlinearity
0.002% typ at 10 kHz
0.005% typ at 100 kHz
0.07% typ at 1 MHz
Input Offset Trimmable to Zero
CMOS or TTL Compatible
Unipolar, Bipolar, or Differential V/F
V/F or F/V Conversion
Available in Surface Mount
MIL-STD-883 Compliant Versions Available
PRODUCT DESCRIPTION
The AD650 V/F/V (voltage-to-frequency or frequency-to-voltage
converter) provides a combination of high frequency operation
and low nonlinearity previously unavailable in monolithic form.
The inherent monotonicity of the V/F transfer function makes
the AD650 useful as a high-resolution analog-to-digital converter.
A flexible input configuration allows a wide variety of input volt-
age and current formats to be used, and an open-collector output
with separate digital ground allows simple interfacing to either
standard logic families or opto-couplers.
The linearity error of the AD650 is typically 20 ppm (0.002%
of full scale) and 50 ppm (0.005%) maximum at 10 kHz full
scale. This corresponds to approximately 14-bit linearity in an
analog-to-digital converter circuit. Higher full-scale frequencies
or longer count intervals can be used for higher resolution con-
versions. The AD650 has a useful dynamic range of six decades
allowing extremely high resolution measurements. Even at 1 MHz
full scale, linearity is guaranteed less than 1000 ppm (0.1%) on
the AD650KN, BD, and SD grades.
In addition to analog-to-digital conversion, the AD650 can be used
in isolated analog signal transmission applications, phased locked-
loop circuits, and precision stepper motor speed controllers. In
the F/V mode, the AD650 can be used in precision tachometer
and FM demodulator circuits.
The input signal range and full-scale output frequency are user-
programmable with two external capacitors and one resistor.
Input offset voltage can be trimmed to zero with an external
potentiometer.
The AD650JN and AD650KN are offered in a plastic 14-lead
DIP package. The AD650JP is available in a 20-lead plastic
leaded chip carrier (PLCC). Both plastic packaged versions of the
AD650 are specified for the commercial (0
�C to +70�C) tempera-
ture range. For industrial temperature range (�25
�C to +85�C)
applications, the AD650AD and AD650BD are offered in a
ceramic package. The AD650SD is specified for the full �55
�C
to +125
�C extended temperature range.
PRODUCT HIGHLIGHTS
1. In addition to very high linearity, the AD650 can operate at
full-scale output frequency up to 1 MHz. The combination of
these two features makes the AD650 an inexpensive solution
for applications requiring high resolution monotonic A/D
conversion.
2. The AD650 has a very versatile architecture that can be con-
figured to accommodate bipolar, unipolar, or differential
input voltages, or unipolar input currents.
3. TTL or CMOS compatibility is achieved using an open
collector frequency output. The pull-up resistor can be
connected to voltages up to +30 V, or +15 V or +5 V for
conventional CMOS or TTL logic levels.
4. The same components used for V/F conversion can also be
used for F/V conversion by adding a simple logic biasing net-
work and reconfiguring the AD650.
5. The AD650 provides separate analog and digital grounds.
This feature allows prevention of ground loops in real-world
applications.
6. The AD650 is available in versions compliant with MIL-
STD-883. Refer to the Analog Devices Military Products
Databook or current AD650/883B data sheet for detailed
specifications.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700
World Wide Web Site: http://www.analog.com
Fax: 781/326-8703
� Analog Devices, Inc., 2000

AD650J/AD650A
AD650K/AD650B
AD650S
Model
Min
Typ
Max
Min
Typ
Max
Min
Typ
Max
Units
DYNAMIC PERFORMANCE
Full-Scale Frequency Range
1
1
1
MHz
Nonlinearity
1
f
MAX
= 10 kHz
0.002
0.005
0.002
0.005
0.002
0.005
%
Nonlinearity
1
f
MAX
= 100 kHz
0.005
0.02
0.005
0.02
0.005
0.02
%
Nonlinearity
1
f
MAX
= 500 kHz
0.02
0.05
0.02
0.05
0.02
0.05
%
Nonlinearity
1
f
MAX
= 1 MHz
0.1
0.05
0.1
0.05
0.1
%
Full-Scale Calibration Error
2
, 100 kHz
�5
�5
�5
%
Full-Scale Calibration Error
2
,
1 MHz
�10
�10
�10
%
vs. Supply
3
�0.015
+0.015
�0.015
+0.015
�0.015
+0.015
% of FSR/V
vs. Temperaturc
A, B, and S Grades
at 10 kHz
�75
�75
�75
ppm/
�C
at 100 kHz
�150
�150
�150
ppm/
�C
J and K Grades
at 10 kHz
�75
�75
ppm/
�C
at 100 kHz
�150
�150
ppm/
�C
BIPOLAR OFFSET CURRENT
Activated by 1.24 k
Between Pins 4 and 5
0.45
0.5
0.55
0.45
0.5
0.55
0.45
0.5
0.55
mA
DYNAMIC RESPONSE
Maximum Settling Time for Full Scale
Step Input
1 Pulse of New Frequency Plus 1
�s 1 Pulse of New Frequency Plus 1 �s 1 Pulse of New Frequency Plus 1 �s
Overload Recovery Time
Step Input
1 Pulse of New Frequency Plus 1
�s 1 Pulse of New Frequency Plus 1 �s 1 Pulse of New Frequency Plus 1 �s
ANALOLG INPUT AMPLIFIER (V/F Conversion)
Current Input Range (Figure 1)
0
+0.6
0
+0.6
0
+0.6
mA
Voltage Input Range (Figure 5)
�10
0
�10
0
�10
0
V
Differential Impedance
2 M
10 pF
2 M
10 pF
2 M
10 pF
Common-Mode Impedance
1000 M
10 pF
1000 M
10 pF
1000 M
10 pF
Input Bias Current
Noninverting Input
40
100
40
100
40
100
nA
Inverting Input
�8
20
�8
20
�8
20
nA
Input Offset Voltage
(Trimmable to Zero)
4
4
4
mV
vs. Temperature (T
MIN
to T
MAX
)
�30
�30
�30
� V/�C
Safe Input Voltage
�V
S
�V
S
�V
S
C
COMPARATOR (F/V Conversion)
Logic "0" Level
�V
S
�1
�V
S
�1
�V
S
+1
V
Logic "1" Level
0
+V
S
0
+V
S
0
+V
S
V
Pulse Width Range
4
0.1
(0.3
� t
OS
)
0.1
(0.3
� t
OS
)
0.1
(0.3
� t
OS
)
�s
Input Impedance
250
250
250
k
OPEN COLLECTOR OUTPUT (V/F Conversion)
Output Voltage in Logic "0"
I
SINK
8 mA, T
MIN
to T
MAX
0.4
0.4
0.4
V
Output Leakage Current in Logic "1"
100
100
100
nA
Voltage Range
5
0
+36
0
+36
0
+36
V
AMPLIFIER OUTPUT (F/V Conversion)
Voltage Range (1500
min Load Resistance)
0
+10
0
+10
0
+10
V
Source Current (750
max Load Resistance)
10
10
10
mA
Capacitive Load (Without Oscillation)
100
100
100
pF
POWER SUPPLY
Voltage, Rated Performance
�9
18
�9
18
�9
18
V
Quiescent Current
8
8
8
mA
TEMPERATURE RANGE
Rated Performance � N Package
0
+70
0
+70
�C
Rated Performance �
D Package
�25
+85
�25
+85
�55
+125
�C
NOTES
1
Nonlinearity is defined as deviation from a straight line from zero to full scale, expressed as a fraction of full scale.
2
Full-scale calibration error adjustable to zero.
3
Measured at full-scale output frequency of 100 kHz.
4
Refer to F/V conversion section of the text.
5
Referred to digital ground.
Specifications subject to change without notice.
Specifications shown in boldface are tested on all production units at final electrical test. Results from those test are used to calculate outgoing quality levels. All min and max
specifications are guaranteed, although only those shown in boldface are tested on all production units.
AD650�SPECIFICATIONS
(@ +25 C, with V
S
= 15 V, unless otherwise noted)
REV. C
�2�

AD650
REV. C
�3�
ABSOLUTE MAXIMUM RATINGS
Total Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 V
Storage Temperature . . . . . . . . . . . . . . . . . . . �55
�C to +150�C
Differential Input Voltage . . . . . . . . . . . . . . . . . . . . . . .
�10 V
Maximum Input Voltage . . . . . . . . . . . . . . . . . . . . . . . . . .
�V
S
Open Collector Output Voltage Above Digital GND . . . . . 36 V
Open Collector Output
Current . . . . . . . . . . . . . . . . . . 50 mA
Amplifier Short Circuit to Ground . . . . . . . . . . . . . . Indefinite
Comparator Input Voltage . . . . . . . . . . . . . . . . . . . . . . . . .
�V
S
PIN CONFIGURATION
PIN
NO.
D-14
N-14
P-20A
1
V
OUT
V
OUT
NC
2
+IN
+IN
V
OUT
3
�IN
�IN
+IN
4
BIPOLAR OFFSET
BIPOLAR OFFSET
�IN
CURRENT
CURRENT
5
�V
S
�V
S
NC
6
ONE SHOT
ONE SHOT
BIPOLAR OFFSET
CAPACITOR
CAPACITOR
CURRENT
7
NC
NC
NC
8
F
OUTPUT
F
OUTPUT
�V
S
9
COMPARATOR
COMPARATOR
ONE SHOT
INPUT
INPUT
CAPACITOR
10
DIGITAL GND
DIGITAL GND
NC
11
ANALOG GND
ANALOG GND
NC
12
+V
S
+V
S
F
OUTPUT
13
OFFSET NULL
OFFSET NULL
COMPARATOR
INPUT
14
OFFSET NULL
OFFSET NULL
DIGITAL GND
15
NC
16
ANALOG GND
17
NC
18
+V
S
19
OFFSET NULL
20
OFFSET NULL
ORDERING GUIDE
Gain
Tempco
Specified
ppm/ C
1 MHz
Temperature
Package
Package
Model
100 kHz
Linearity
Range C
Description
Option
AD650JN
150 typ
0.1% typ
0 to +70
Plastic DIP
N-14
AD650KN
150 typ
0.1% max
0 to +70
Plastic DIP
N-14
AD650JP
150 typ
0.1% typ
0 to +70
Plastic Leaded Chip Carrier (PLCC)
P-20A
AD650AD
150 max
0.1% typ
�25 to +85
Ceramic DIP
D-14
AD650BD
150 max
0.1% max
�25 to +85
Ceramic DIP
D-14
AD650SD
150 max
0.1% max
�55 to +125
Ceramic DIP
D-14

AD650
REV. C
�4�
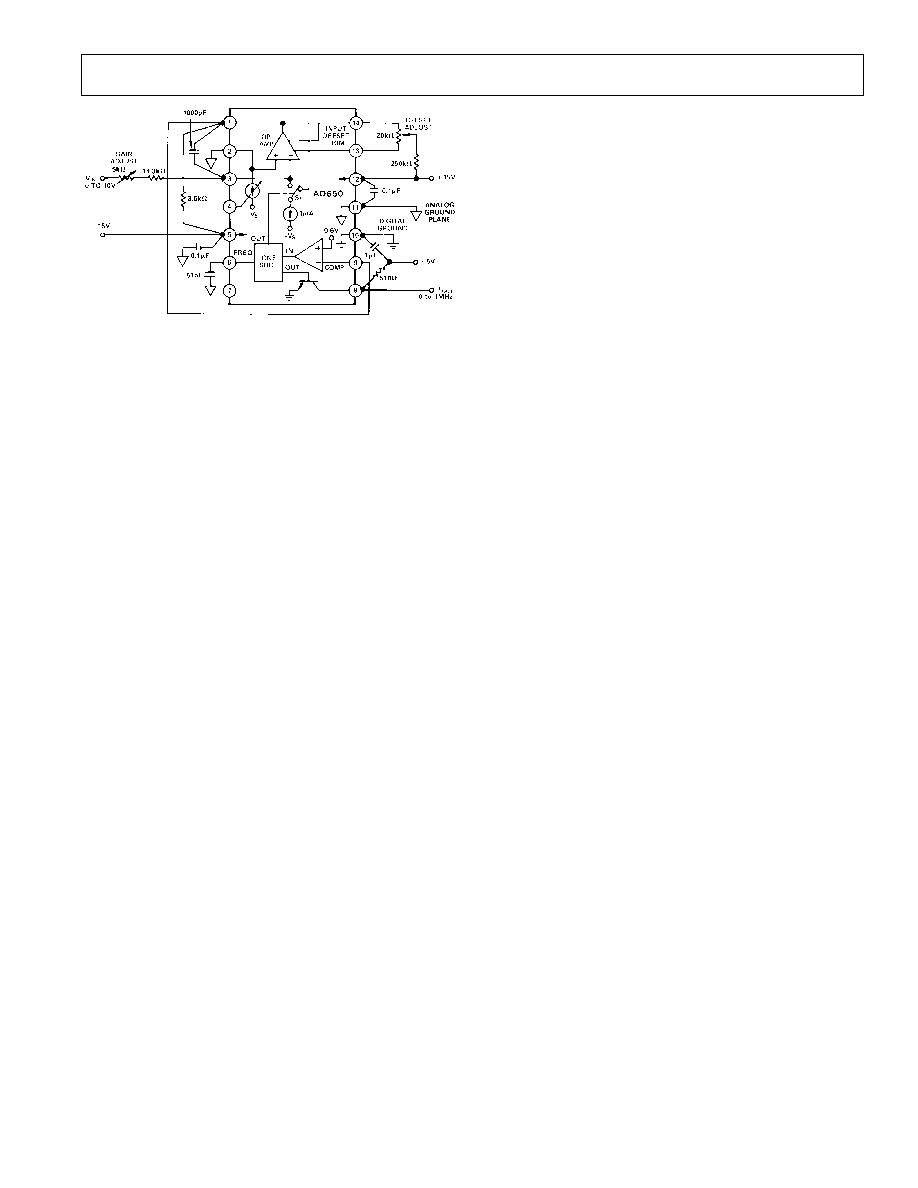
CIRCUIT OPERATION
UNIPOLAR CONFIGURATION
The AD650 is a charge balance voltage-to-frequency converter. In
the connection diagram shown in Figure 1, or the block diagram
of Figure 2a, the input signal is converted into an equivalent cur-
rent by the input resistance R
IN
. This current is exactly balanced
by an internal feedback current delivered in short, timed bursts
from the switched 1 mA internal current source. These bursts of
current may be thought of as precisely defined packets of charge.
The required number of charge packets, each producing one
pulse of the output transistor, depends upon the amplitude of
the input signal. Since the number of charge packets delivered
per unit time is dependent on the input signal amplitude, a linear
voltage-to-frequency transformation will be accomplished. The
frequency output is furnished via an open collector transistor.
A more rigorous analysis demonstrates how the charge balance
voltage-to-frequency conversion takes place.
A block diagram of the device arranged as a V-to-F converter is
shown in Figure 2a. The unit is comprised of an input integra-
tor, a current source and steering switch, a comparator and a
one-shot. When the output of the one-shot is low, the current
steering switch S
1
diverts all the current to the output of the op
amp; this is called the Integration Period. When the one-shot
has been triggered and its output is high, the switch S
1
diverts
all the current to the summing junction of the op amp; this is
called the Reset Period. The two different states are shown in
Figure 2 along with the various branch currents. It should be
noted that the output current from the op amp is the same for
either state, thus minimizing transients.
Figure 1. Connection Diagram for V/F Conversion,
Positive Input Voltage
Figure 2a. Block Diagram
Figure 2b. Reset Mode Figure 2c. Integrate Mode
Figure 2d. Voltage Across C
INT
The positive input voltage develops a current (I
IN
= V
IN
/R
IN
)
which charges the integrator capacitor C
INT
. As charge builds up
on C
INT
, the output voltage of the integrator ramps downward
towards ground. When the integrator output voltage (Pin 1)
crosses the comparator threshold (�0.6 volt) the comparator
triggers the one shot, whose time period, t
OS
is determined by
the one shot capacitor C
OS
.
Specifically, the one shot time period is:
t
OS
= C
OS
� 6.8 �10
3
sec /F
+ 3.0 �10
�7 sec
(1)
The Reset Period is initiated as soon as the integrator output
voltage crosses the comparator threshold, and the integrator
ramps upward by an amount:
V = t
OS
�
dV
dt
=
t
OS
C
INT
1mA � I
N
(
)
(2)
After the Reset Period has ended, the device starts another Inte-
gration Period, as shown in Figure 2, and starts ramping downward
again. The amount of time required to reach the comparator
threshold is given as:
T
I
= V
dV
dt
=
t
OS
/C
INT
(1 mA � I
IN
)
I
N
/C
INT
= t
OS
1 mA
I
IN
� 1
(3)
The output frequency is now given as:
f
OUT
=
1
t
OS
+ T
I
=
I
IN
t
OS
�1 mA
= 0.15 F � Hz
A
V
IN
/R
IN
C
OS
+ 4.4 �10
�11
F
(4)
Note that C
INT
, the integration capacitor has no effect on the
transfer relation, but merely determines the amplitude of the
sawtooth signal out of the integrator.
One Shot Timing
A key part of the preceding analysis is the one shot time period
that was given in equation (1). This time period can be broken
down into approximately 300 ns of propagation delay, and a sec-
ond time segment dependent linearly on timing capacitor C
OS
.
When the one shot is triggered, a voltage switch that holds Pin 6
AD650
REV. C
�5�
at analog ground is opened allowing that voltage to change. An
internal 0.5 mA current source connected to Pin 6 then draws
its current out of C
OS
, causing the voltage at Pin 6 to decrease
linearly. At approximately �3.4 V, the one shot resets itself,
thereby ending the timed period and starting the V/F conversion
cycle over again. The total one shot time period can be written
mathematically as:
t
OS
=
V C
OS
I
DISCHARGE
+ T
GATE DELAY
(5)
substituting actual values quoted above,
t
OS
=
�3.4 V
� C
OS
�0.5
�10
�3
A
+ 300 �10
�9
sec
(6)
This simplifies into the timed period equation given above.
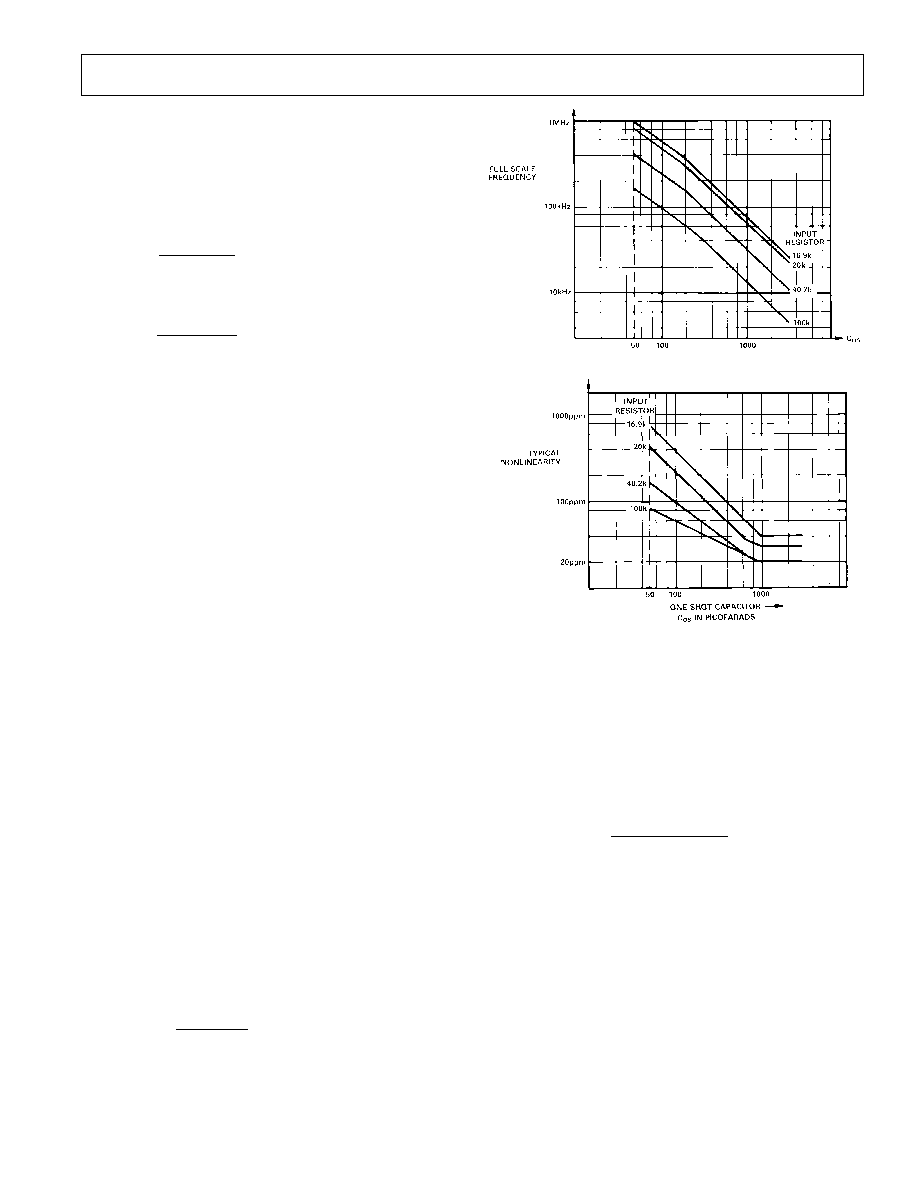
COMPONENT SELECTION
Only four component values must be selected by the user. These
are input resistance R
IN
, timing capacitor C
OS
, logic resistor R2,
and integration capacitor C
INT
. The first two determine the
input voltage and full-scale frequency, while the last two are
determined by other circuit considerations.
Of the four components to be selected, R2 is the easiest to
define. As a pull-up resistor, it should be chosen to limit the
current through the output transistor to 8 mA if a TTL maxi-
mum V
OL
of 0.4 V is desired. For example, if a 5 V logic supply
is used, R2 should be no smaller than 5 V/8 mA or 625
. A
larger value can be used if desired.
R
IN
and C
OS
are the only two parameters available to set the
full- scale frequency to accommodate the given signal range.
The "swing" variable that is affected by the choice of R
IN
and
C
OS
is nonlinearity. The selection guide of Figure 3 shows this
quite graphically. In general, larger values of C
OS
and lower
full-scale input currents (higher values of R
IN
) provide better
linearity. In Figure 3, the implications of four different choices
of R
IN
are shown. Although the selection guide is set up for a
unipolar configuration with a zero to 10 V input signal range,
the results can be extended to other configurations and input
signal ranges. For a full scale frequency of 100 kHz (corre-
sponding to 10 V input), you can see that among the available
choices, R
IN
= 20 k and C
OS
= 620 pF gives the lowest nonlin-
earity, 0.0038%. Also, if you wish to use the highest frequency
that will give the 20 ppm minimum nonlinearity, it is approxi-
mately 33 kHz (40.2 k
and 1000 pF).
For input signal spans other than 10 V, the input resistance
must be scaled proportionately. For example, if 100 k
is called
out for a 0 V�10 V span, 10k would be used with a 0 V�1 V
span, or 200 k
with a �10 V bipolar connection.
The last component to be selected is the integration capacitor
C
INT
. In almost all cases, the best value for C
INT
can be calcu-
lated using the equation:
C
INT
= 10
�4
F / sec
f
MAX
(1000 pF minimum)
(7)
When the proper value for C
INT
is used, the charge balance
architecture of the AD650 provides continuous integration of
the input signal, hence large amounts of noise and interference
Figure 3a. Full-Scale Frequency vs. C
OS
Figure 3b. Typical Nonlinearity vs. C
OS
can be rejected. If the output frequency is measured by counting
pulses during a constant gate period, the integration provides
infinite normal-mode rejection for frequencies corresponding to
the gate period and its harmonics. However, if the integrator
stage becomes saturated by an excessively large noise pulse, the
continuous integration of the signal will be interrupted, allowing
the noise to appear at the output. If the approximate amount of
noise that will appear on C
INT
is known (V
NOISE
), the value of
C
INT
can be checked using the following inequality:
C
INT
>
t
OS
�1�10
�3
A
+V
S
� 3V �V
NOISE
(8)
For example, consider an application calling for a maximum
frequency of 75 kHz, a 0 volt�1 volt signal range, and supply
voltages of only
�9 volts. The component selection guide of Fig-
ure 3 is used to select 2.0 k
for R
IN
and 1000 pF for C
OS
. This
results in a one shot time period of approximately 7
�s. Sub-
stituting 75 kHz into equation 7 yields a value of 1300 pF for
C
INT
. When the input signal is near zero, 1 mA flows through the
integration capacitor to the switched current sink during the reset
phase, causing the voltage across C
INT
to increase by approximately
5.5 volts. Since the integrator output stage requires approximately
3 volts head room for proper operation, only 0.5 volt margin
remains for integrating extraneous noise on the signal line. A
negative noise pulse at this time might saturate the integrator,
causing an error in signal integration. Increasing C
INT
to 1500 pF
or 2000 pF will provide much more noise margin, thereby elimi-
nating this potential trouble spot.

AD650
REV. C
�6�
BIPOLAR V/F
Figure 4 shows how the internal bipolar current sink is used to
provide a half-scale offset for a
�5 V signal range, while provid-
ing a 100 kHz maximum output frequency. The nominally 0.5 mA
(
�10%) offset current sink is enabled when a 1.24 k resistor is
connected between Pins 4 and 5. Thus, with the grounded 10 k
nominal resistance shown, a �5 V offset is developed at Pin 2.
Since Pin 3 must also be at �5 V, the current through R
IN
is
10 V/40 k
= +0.25 mA at V
IN
= +5 V, and 0 mA at
V
IN
= �5 V.
Components are selected using the same guidelines outlined for
the unipolar configuration with one alteration. The voltage
across the total signal range must be equated to the maximum
Figure 4. Connections for
�5 V Bipolar V/F with 0 to
100 kHz TTL Output
input voltage in the unipolar configuration. In other words, the
value of the input resistor R
IN
is determined by the input voltage
span, not the maximum input voltage. A diode from Pin 1 to
ground is also recommended. This is further discussed in the
Other Circuit Conditions section.
As in the unipolar circuit, R
IN
and C
OS
must have low tempera-
ture coefficients to minimize the overall gain drift. The 1.24 k
resistor used to activate the 0.5 mA offset current should also
have a low temperature coefficient. The bipolar offset current
has a temperature coefficient of approximately �200 ppm/
�C.
UNIPOLAR V/F, NEGATIVE INPUT VOLTAGE
Figure 5 shows the connection diagram for V/F conversion of
negative input voltages. In this configuration full-scale output
frequency occurs at negative full-scale input, and zero output
frequency corresponds with zero input voltage.
A very high impedance signal source may be used since it only
drives the noninverting integrator input. Typical input imped-
ance at this terminal is 1 G
or higher. For V/F conversion of
positive input signals using the connection diagram of Figure 1,
the signal generator must be able to source the integration cur-
rent to drive the AD650. For the negative V/F conversion circuit
of Figure 5, the integration current is drawn from ground
through R1 and R3, and the active input is high impedance.
Circuit operation for negative input voltages is very similar to
positive input unipolar conversion described in a previous sec-
tion. For best operating results use component equations listed
in that section.
Figure 5. Connection Diagram for V/F Conversion,
Negative Input Voltage
F/V CONVERSION
The AD650 also makes a very linear frequency-to-voltage
converter. Figure 6 shows the connection diagram for F/V con-
version with TTL input logic levels. Each time the input signal
crosses the comparator threshold going negative, the one shot is
activated and switches 1 mA into the integrator input for a
measured time period (determined by C
OS
). As the frequency
increases, the amount of charge injected into the integration
capacitor increase proportionately. The voltage across the inte-
gration capacitor is stabilized when the leakage current through
R1 and R3 equals the average current being switched into the
integrator. The net result of these two effects is an average output
voltage which is proportional to the input frequency. Optimum
performance can be obtained by selecting components using the
same guidelines and equations listed in the V/F Conversion section.
The reader is referred to Analog Devices' Application Note
AN-279 where a more complete description of this application
can be found.
Figure 6. Connection Diagram for F/V Conversion
HIGH FREQUENCY OPERATION
Proper RF techniques must be observed when operating the
AD650 at or near its maximum frequency of 1 MHz. Lead
lengths must be kept as short as possible, especially on the one
shot and integration capacitors, and at the integrator summing
junction. In addition, at maximum output frequencies above
500 kHz, a 3.6 k
pull-down resistor from Pin 1 to �V
S
is required
(see Figure 7). The additional current drawn through the pull-
down resistor reduces the op amp's output impedance and
improves its transient response.
AD650
REV. C
�7�
Figure 7. 1 MHz V/F Connection Diagram
DECOUPLING AND GROUNDING
It is good engineering practice to use bypass capacitors on the
supply-voltage pins and to insert small-valued resistors (10
to
100
) in the supply lines to provide a measure of decoupling
between the various circuits in a system. Ceramic capacitors of
0.1
�F to 1.0 �F should be applied between the supply-voltage
pins and analog signal ground for proper bypassing on the AD650.
In addition, a larger board level decoupling capacitor of 1
�F to
10
�F should be located relatively close to the AD650 on each
power supply line. Such precautions are imperative in high reso-
lution data acquisition applications where one expects to exploit
the full linearity and dynamic range of the AD650. Although
some types of circuits may operate satisfactorily with power sup-
ply decoupling at only one location on each circuit board, such
practice is strongly discouraged in high accuracy analog design.
Separate digital and analog grounds are provided on the AD650.
The emitter of the open collector frequency output transistor is
the only node returned to the digital ground. All other signals
are referred to analog ground. The purpose of the two separate
grounds is to allow isolation between the high precision analog
signals and the digital section of the circuitry. As much as sev-
eral hundred millivolts of noise can be tolerated on the digital
ground without affecting the accuracy of the VFC. Such ground
noise is inevitable when switching the large currents associated
with the frequency output signal.
At 1 MHz full scale, it is necessary to use a pull-up resistor of
about 500
in order to get the rise time fast enough to provide
well defined output pulses. This means that from a 5 volt logic
supply, for example, the open collector output will draw 10 mA.
This much current being switched will surely cause ringing on
long ground runs due to the self inductance of the wires. For
instance, #20 gauge wire has an inductance of about 20 nH per
inch; a current of 10 mA being switched in 50 ns at the end of
12 inches of 20 gauge wire will produce a voltage spike of 50 mV.
The separate digital ground of the AD650 will easily handle
these types of switching transients.
A problem will remain from interference caused by radiation of
electro-magnetic energy from these fast transients. Typically, a
voltage spike is produced by inductive switching transients;
these spikes can capacitively couple into other sections of the
circuit. Another problem is ringing of ground lines and power
supply lines due to the distributed capacitance and inductance
of the wires. Such ringing can also couple interference into sen-
sitive analog circuits. The best solution to these problems is
proper bypassing of the logic supply at the AD650 package. A
1
�F to 10 �F tantalum capacitor should be connected directly
to the supply side of the pull-up resistor and to the digital
ground--Pin 10. The pull-up resistor should be connected
directly to the frequency output--Pin 8. The lead lengths on the
bypass capacitor and the pull up resistor should be as short as
possible. The capacitor will supply (or absorb) the current tran-
sients, and large ac signals will flow in a physically small loop
through the capacitor, pull up resistor, and frequency output
transistor. It is important that the loop be physically small for
two reasons: first, there is less self-inductance if the wires are
short, and second, the loop will not radiate RFI efficiently.
The digital ground (Pin 10) should be separately connected to
the power supply ground. Note that the leads to the digital
power supply are only carrying dc current and cannot radiate
RFI. There may also be a dc ground drop due to the difference
in currents returned on the analog and digital grounds. This will
not cause any problem. In fact, the AD650 will tolerate as much
as 0.25 volt dc potential difference between the analog and digital
grounds. These features greatly ease power distribution and
ground management in large systems. Proper technique for
grounding requires separate digital and analog ground returns to
the power supply. Also, the signal ground must be referred
directly to analog ground (Pin 11) at the package. All of the sig-
nal grounds should be tied directly to Pin 11, especially the
one-shot capacitor. More information on proper grounding and
reduction of interference can be found in Reference 1.
TEMPERATURE COEFFICIENTS
The drift specifications of the AD650 do not include temperature
effects of any of the supporting resistors or capacitors. The drift
of the input resistors R1 and R3 and the timing capacitor C
OS
directly affect the overall temperature stability. In the application
of Figure 2, a 10 ppm/
�C input resistor used with a 100 ppm/�C
capacitor may result in a maximum overall circuit gain drift of:
150 ppm/
�C (AD650A) + 100 ppm/�C (C
OS
) + 10 ppm/
�C (R
IN
) 260 ppm/
�C
In bipolar configuration, the drift of the 1.24 k
resistor used to
activate the internal bipolar offset current source will directly
affect the value of this current. This resistor should be matched
to the resistor connected to the op amp noninverting input (Pin
2), see Figure 4. That is, the temperature coefficients of these
two resistors should be equal. If this is the case, then the effects
of the temperature coefficients of the resistors cancel each other,
and the drift of the offset voltage developed at the op amp non-
inverting input will be determined solely by the AD650. Under
these conditions the TC of the bipolar offset voltage is typically
�200 ppm/
�C and is a maximum of �300 ppm/�C. The offset
voltage always decreases in magnitude as temperature is increased.
Other circuit components do not directly influence the accuracy
of the VFC over temperature changes as long as their actual val-
ues are not so different from the nominal value as to preclude
operation. This includes the integration capacitor, C
INT
. A
change in the capacitance value of C
INT
simply results in a dif-
ferent rate of voltage change across the capacitor. During the
Integration Phase (refer to Figure 2), the rate of voltage change
across C
INT
has the opposite effect that it does during the Reset
Phase. The result is that the conversion accuracy is unchanged
1
"Noise Reduction Techniques in Electronic Systems," by H. W. OTT,
(John Wiley, 1976).

AD650
REV. C
�8�
by either drift or tolerance of C
INT
. The net effect of a change in
the integrator capacitor is simply to change the peak to peak ampli-
tude of the sawtooth waveform at the output of the integrator.
The gain temperature coefficient of the AD650 is not a constant
value. Rather the gain TC is a function of both the full-scale
frequency and the ambient temperature. At a low full-scale
frequency, the gain TC is determined primarily by the stability
of the internal reference--a buried Zener reference. This low
speed gain TC can be quite good; at 10 kHz full scale, the gain
TC near 25
�C is typically 0 � 50 ppm/�C. Although the gain TC
changes with ambient temperature (tending to be more positive
at higher temperatures), the drift remains within a
�75 ppm/�C
window over the entire military temperature range. At full-scale
frequencies higher than 10 kHz dynamic errors become much
more important than the static drift of the dc reference. At a
full-scale frequency of 100 kHz and above, these timing errors
dominate the gain TC. For example, at 100 kHz full-scale
frequency (R
IN
= 40 k and C
OS
= 330 pF) the gain TC near
room temperature is typically �80
� 50 ppm/�C, but at an ambi-
ent temperature near +125
�C, the gain TC tends to be more
positive and is typically +15
� 50 ppm/�C. This information is
presented in a graphical form in Figure 8. The gain TC always
tends to become more positive at higher temperatures. There-
fore, it is possible to adjust the gain TC of the AD650 by using
a one-shot capacitor with an appropriate TC to cancel the drift
of the circuit. For example, consider the 100 kHz full-scale
frequency. An average drift of �100 ppm/
�C means that as
temperature is increased, the circuit will produce a lower fre-
quency in response to a given input voltage. This means that the
one-shot capacitor must decrease in value as temperature increases
in order to compensate the gain TC of the AD650; that is, the
capacitor must have a TC of �100 ppm/
�C. Now consider the
1 MHz full-scale frequency.
Figure 8. Gain TC vs. Temperature
It is not possible to achieve very much improvement in perfor-
mance unless the expected ambient temperature range is known.
For example, in a constant low temperature application such as
gathering data in an Arctic climate (approximately �20
�C), a
C
OS
with a drift of �310 ppm/
�C is called for in order to compen-
sate the gain drift of the AD650. However, if that circuit should
see an ambient temperature of +75
�C, the C
OS
cap would
change the gain TC from approximately 0 ppm to +310 ppm/
�C.
The temperature effects of the components described above are
the same when the AD650 is configured for negative or bipolar
input voltages, and for F/V conversion as well.
NONLINEARITY SPECIFICATION
The linearity error of the AD650 is specified by the endpoint
method. That is, the error is expressed in terms of the deviation
from the ideal voltage to frequency transfer relation after cali-
brating the converter at full scale and "zero". The nonlinearity
will vary with the choice of one-shot capacitor and input resistor
(see Figure 3). Verification of the linearity specification requires
the availability of a switchable voltage source (or a DAC) having
a linearity error below 20 ppm, and the use of very long mea-
surement intervals to minimize count uncertainties. Every AD650
is automatically tested for linearity, and it will not usually be
necessary to perform this verification, which is both tedious and
time consuming. If it is required to perform a nonlinearity test
either as part of an incoming quality screening or as a final prod-
uct evaluation, an automated "bench-top" tester would prove
useful. Such a system based on the Analog Devices' LTS-2010
is described in Reference 2.
The voltage-to-frequency transfer relation is shown in Figure 9
with the nonlinearity exaggerated for clarity. The first step in
determining nonlinearity is to connect the endpoints of the
Figure 9a. Exaggerated Nonlinearity at 100 kHz Full Scale
Figure 9b. Exaggerated Nonlinearity at 1 MHz Full Scale
operating range (typically at 10 mV and 10 V) with a straight
line. This straight line is then the ideal relationship which is
desired from the circuit. The second step is to find the difference
between this line and the actual response of the circuit at a few
points between the endpoints--typically ten intermediate points
will suffice. The difference between the actual and the ideal
response is a frequency error measured in hertz. Finally, these
frequency errors are normalized to the full-scale frequency and
expressed either as parts per million of full scale (ppm) or parts
per hundred of full scale (%). For example, on a 100 kHz full
2
"V�F Converters Demand Accurate Linearity Testing," by L. DeVito,
(Electronic Design, March 4, 1982).
AD650
REV. C
�9�
scale, if the maximum frequency error is 5 Hz, the nonlinearity
would be specified as 50 ppm or 0.005%. Typically on the
100 kHz scale, the nonlinearity is positive and the maximum
value occurs at about midscale (Figure 9a). At higher full-scale fre-
quencies, (500 kHz to 1 MHz), the nonlinearity becomes "S"
shaped and the maximum value may be either positive or nega-
tive. Typically, on the 1 MHz scale (R
IN
= 16.9k, C
OS
= 51 pF)
the nonlinearity is positive below about 2/3 scale and is negative
above this point. This is shown graphically in Figure 9b.
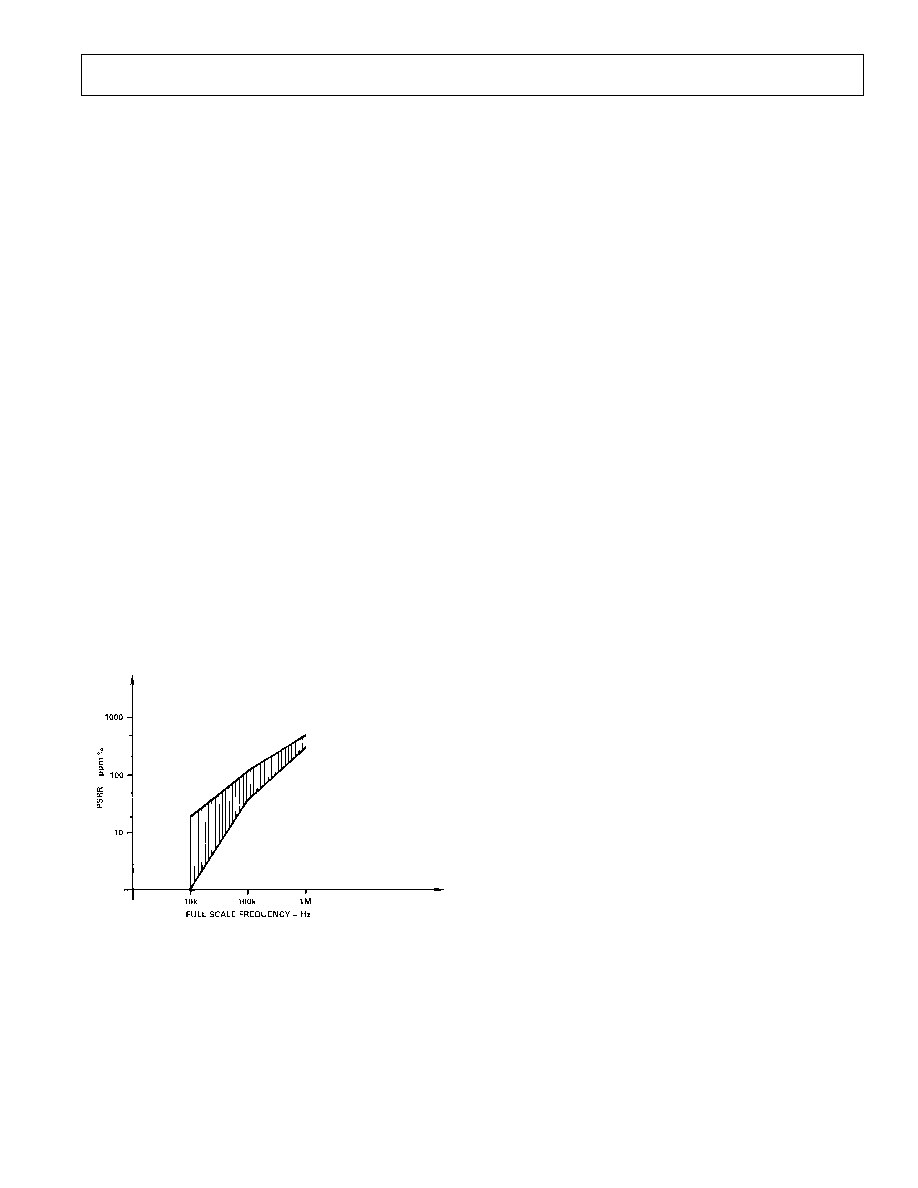
PSRR
The power supply rejection ratio is a specification of the change
in gain of the AD650 as the power supply voltage is changed.
The PSRR is expressed in units of parts-per-million change of
the gain per percent change of the power supply--ppm/%. For
example, consider a VFC with a 10 volt input applied and an
output frequency of exactly 100 kHz when the power supply
potential is
�15 volts. Changing the power supply to �12.5 volts
is a 5 volt change out of 30 volts, or 16.7%. If the output frequency
changes to 99.9 kHz, the gain has changed 0.1% or 1000 ppm.
The PSRR is 1000 ppm divided by 16.7% which equals 60 ppm/%.
The PSRR of the AD650 is a function of the full-scale operating
frequency. At low full-scale frequencies the PSRR is determined
by the stability of the reference circuits in the device and can be
very good. At higher frequencies there are dynamic errors which
become more important than the static reference signals, and
consequently the PSRR is not quite as good. The values of PSRR
are typically 0
� 20 ppm/% at 10 kHz full-scale frequency (R
IN
= 40 k, C
OS
= 3300 pF). At 100 kHz (R
IN
= 40k, C
OS
= 330 pF)
the PSRR is typically +80
� 40 ppm/%, and at 1 MHz (R
IN
=
16.9 k
, C
OS
= 51 pF) the PSRR is +350
� 50 ppm/%. This
information is summarized graphically in Figure 10.
Figure 10. PSRR vs. Full-Scale Frequency
OTHER CIRCUIT CONSIDERATIONS
The input amplifier connected to Pins 1, 2 and 3 is not a standard
operational amplifier. Rather, the design has been optimized for
simplicity and high speed. The single largest difference between
this amplifier and a normal op amp is the lack of an integrator
(or level shift) stage. Consequently the voltage on the output
(Pin 1) must always be more positive than 2 volts below the
inputs (Pins 2 and 3). For example, in the F-to-V conversion
mode, see Figure 6, the noninverting input of the op amp (Pin 2) is
grounded, which means that the output (Pin 1) will not be able
to go below �2 volts. Normal operation of the circuit as shown
in the figure will never call for a negative voltage at the output
but one may imagine an arrangement calling for a bipolar out-
put voltage (say
�10 volts) by connecting an extra resistor from
Pin 3 to a positive voltage. This will not work.
Care should be taken under conditions where a high positive
input voltage exists at or before power up. These situations can
cause a latch up at the integrator output (Pin 1). This is a non-
destructive latch and, as such, normal operation can be restored
by cycling the power supply. Latch up can be prevented by
connecting two diodes (e.g., 1N914 or 1N4148) as shown in
Figure 4, thereby, preventing Pin 1 from swinging below Pin 2.
A second major difference is that the output will only sink 1 mA
to the negative supply. There is no pulldown stage at the output
other than the 1 mA current source used for the V-to-F conver-
sion. The op amp will source a great deal of current from the
positive supply, and it is internally protected by current limiting.
The output of the op amp may be driven to within 3 volts of the
positive supply when it is not sourcing external current. When
sourcing 10 mA the output voltage may be driven to within
6 volts of the positive supply.
A third difference between this op amp and a normal device is
that the inverting input, Pin 3, is bias current compensated and
the noninverting input is not bias current compensated. The
bias current at the inverting input is nominally zero, but may be
as much as 20 nA in either direction. The noninverting input
typically has a bias current of 40 nA that always flows into the
node (an npn input transistor). Therefore, it is not possible to
match input voltage drops due to bias currents by matching
input resistors.
The op amp has provisions for trimming the input offset volt-
age. A potentiometer of 20 k
is connected to Pins 13 and 14
and the wiper is connected to the positive supply through a
250 k
resistor. A potential of about 0.6 volt is established
across the 250 k
resistor, and the 3 �A current is injected into
the null pins. It is also possible to null the op amp offset voltage
by using only one of the null pins and use a bipolar current
either into or out of the null pin. The amount of current required
will be very small--typically less than 3
�A. This technique is
shown in the applications section of this data sheet: the autozero
circuit uses this technique.
The bipolar offset current is activated by connecting a 1.24 k
resistor between Pin 4 and the negative supply. The resultant
current delivered to the op amp noninverting input is nominally
0.5 mA and has a tolerance of
�10%. This current is then used
to provide an offset voltage when Pin 2 is tied to ground through a
resistor. The 0.5 mA which appears at Pin 2 is also flowing through
the 1.24 k
resistor and this current may be by observing the
voltage across the 1.24 k
resistor. An external resistor is used
to activate the bipolar offset current source to provide the lowest
tolerance and temperature drift of the resultant offset voltage. It
is possible to use other values of resistance between Pin 4 and �V
S
to obtain a bipolar offset current different than 0.5 mA. Fig-
ure 11 is a graph of the relationship between the bipolar offset
current and the value of the resistor used to activate the source.

AD650
REV. C
�10�
Figure 11. Bipolar Offset Current vs. External Resistor
APPLICATIONS
DIFFERENTIAL VOLTAGE-TO-FREQUENCY
CONVERSION
The circuit of Figure 12 accepts a true floating differential input
signal. The common-mode input, V
CM
, may be in the range
+15 to �5 volts with respect to analog ground. The signal input,
V
IN
, may be
�5 volts with respect to the common-mode input.
Both inputs are low impedance: the source which drives the
common-mode input must supply the 0.5 mA drawn by the
bipolar offset current source and the source which drives the
signal input must supply the integration current.
If less common-mode voltage range is required, a lower voltage
Zener may be used. For example, if a 5 volt Zener is used, the
V
CM
input may be in the range +10 to �5 volt. If the Zener is
not used at all, the common-mode range will be
�5 volts with
respect to analog ground. If no Zener is used, the 10k pulldown
resistor is not needed and the integrator output (Pin 1) is con-
nected directly to the comparator input (Pin 9).
Figure 12. Differential Input
AUTOZERO CIRCUIT
In order to exploit the full dynamic range of the AD650 VFC,
very small input voltages will need to be converted. For example,
a six decade dynamic range based on a full scale of 10 volts will
require accurate measurement of signals down to 10
�V. In these
situations a well-controlled input offset voltage is imperative. A
constant offset voltage will not affect dynamic range but simply
shift all of the frequency readings by a few hertz. However, if the
offset should change, then it will not be possible to distinguish
between a small change in a small input voltage and a drift of
the offset voltage. Hence, the usable dynamic range is less. The
circuit shown in Figure 13 provides automatic adjustment of the
op amp offset voltage. The circuit uses an AD582 sample and
hold amplifier to control the offset and the input voltage to the
VFC is switched between ground and the signal to be measured
via an AD7512DI analog switch. The offset of the AD650 is
adjusted by injecting a current into or drawing a current out of
Pin 13. Note that only one of the offset null pins is used. During
the "VFC Norm" mode, the SHA is in the hold mode and the
hold capacitor is very large, 0.1
�F, to hold the AD650 offset
constant for a long period of time.
Figure 13. Autozero Circuit
When the circuit is in the "Autozero" mode the SHA is in
sample mode and behaves like an op amp. The circuit is a varia-
tion of the classical two amplifier servo loop, where the output
of the Device Under Test (DUT)--here the DUT is the AD650
op amp--is forced to ground by the feedback action of the con-
trol amplifier--the SHA. Since the input of the VFC circuit is
connected to ground during the autozero mode, the input cur-
rent which can flow is determined by the offset voltage of the
AD650 op amp. Since the output of the integrator stage is
forced to ground it is known that the voltage is not changing (it
is equal to ground potential). Hence if the output of the integra-
tor is constant, its input current must be zero, so the offset voltage
has been forced to be zero. Note that the output of the DUT
could have been forced to any convenient voltage other than
ground. All that is required is that the output voltage be known
to be constant. Note also that the effect of the bias current at
the inverting input of the AD650 op amp is also nulled in this
circuit. The 1000 pF capacitor shunting the 200 k
resistor
is compensation for the two amplifier servo loop. Two integra-
tors in a loop requires a single zero for compensation. Note that
the 3.6 k
resistor from Pin 1 of the AD650 to the negative sup-
ply is not part of the autozero circuit, but rather it is required for
VFC operation at 1 MHz.
PHASE LOCKED LOOP F/V CONVERSION
Although the F/V conversion technique shown in Figure 6 is quite
accurate and uses only a few extra components, it is very limited
in terms of signal frequency response and carrier feed-through.
If the carrier (or input) frequency changes instantaneously, the

AD650
REV. C
�11�
output cannot change very rapidly due to the integrator time
constant formed by C
INT
and R
IN
. While it is possible to decrease
the integrator time constant to provide faster settling of the
F-to-V output voltage, the carrier feedthrough will then be
larger. For signal frequency response in excess of 2 kHz, a phase
locked F/V conversion technique such as the one shown in Fig-
ure 14 is recommended.
Figure 14. Phase Locked Loop F/V Conversion
In a phase locked loop circuit, the oscillator is driven to a frequency
and phase equal to an input reference signal. In applications
such as a synthesizer, the oscillator output frequency is first pro-
cessed through a programmable "divide by N" before being
applied to the phase detector as feedback. Here the oscillator
frequency is forced to be equal to "N times" the reference fre-
quency and it is this frequency output which is the desired
output signal and not a voltage. In this case, the AD650 offers
compact size and wide dynamic range.
In signal recovery applications of a PLL, the desired output sig-
nal is the voltage applied to the oscillator. In these situations a
linear relationship between the input frequency and the output
voltage is desired; the AD650 makes a superb oscillator for FM
demodulation. The wide dynamic range and outstanding linearity
of the AD650 VFC allow simple embodiment of high perfor-
mance analog signal isolation or telemetry systems. The circuit
shown in Figure 14 uses a digital phase detector which also pro-
vides proper feedback in the event of unequal frequencies. Such
phase-frequency detectors (PFDs) are available in integrated
form. For a full discussion of phase lock loop circuits see
Reference 3.
An analysis of this circuit must begin at the 7474 dual D flip
flop. When the input carrier matches the output carrier in both
phase and frequency, the Q outputs of the flip flops will rise at
exactly the same time. With two zeros, then two ones on the
inputs of the exclusive or (XOR) gate, the output will remain
low keeping the DMOS FET switched off. Also, the NAND
gate will go low resetting the flip-flops to zero. Throughout the
entire cycle just described, the DMOS integrator gate remained
off, allowing the voltage at the integrator output to remain
unchanged from the previous cycle. However, if the input carrier
leads the output carrier by a few degrees, the XOR gate will be
turned on for the small time span that the two signals are mis-
matched. Since Q
2
will be low during the mismatch time, a
negative current will be fed into the integrator, causing its out-
put voltage to rise. This in turn will increase the frequency of
the AD650 slightly, driving the system towards synchronization.
In a similar manner, if the input carrier lags the output carrier,
the integrator will be forced down slightly to synchronize the
two signals.
Using a mathematical approach, the
�25 �A pulses from the
phase detector are incorporated into the phase detector gain, K
d
.
Using a mathematical approach, the
�25 �A pulses from the
phase detector are incorporated into the phase detector gain, K
d
.
K
d
=
25
�A
2
= 4 �10
�6
amperes/radian (9)
Also, the V/F converter is configured to produce 1 MHz in
response to a 10 volt input, so its gain K
o
, is:
K
o
=
2
�1�10
6
Hz
10 V
= 6.3 �10
5
radians
volt � sec
(10)
The dynamics of the phase relationship between the input and
output signals can be characterized as a second order system
with natural frequency
n
:
n
=
K
o
K
d
C
(11)
and damping factor
=
R C K
o
K
d
2
(12)
For the values shown in Figure 14, these relations simplify to a
natural frequency of 35 kHz with a damping factor of 0.8.
For those desiring a simple approach to determining component
values for other PLL frequencies and VFC full-scale voltage, the
following cookbook steps can be used:
1. Determine K
o
(in units of radians per volt second) from the
maximum input carrier frequency F
MAX
(in hertz) and the
maximum output voltage V
MAX
.
K
o
=
2
� F
MAX
V
MAX
(13)
2. Calculate a value for C based upon the desired loop band-
width, f
n
. Note that this is the desired frequency range of the
output signal. The loop bandwidth (f
n
) is not the maximum
carrier frequency (f
MAX
): the signal may be very narrow even
though it is transmitted over a 1 MHz carrier.
C
=
K
o
f
n
2
�1
�10
�7
V � F
Rad � sec
C units FARADS
f
n
units HERTZ (14)
K
o
units RAD/VOLT�SEC
3. Calculate R to yield a damping factor of approximately 0.8
using this equation:
R
=
f
n
K
o
� 2.5
�10
6
Rad �
V
R units OHMS
f
n
units HERTZ (15)
K
o
units RAD/VOLT�SEC
If in actual operation the PLL overshoots or hunts excessively
before reaching a final value, the damping factor may be raised
by increasing the value of R. Conversely, if the PLL is over-
damped, a smaller value of R should be used.
3
"Phase lock Techniques," 2nd Edition, by F.M. Gardner, (John Wiley and
Sons, 1979)
AD650
REV. C
�12�
C00797�0�7/00 (rev. C)
PRINTED IN U.S.A.
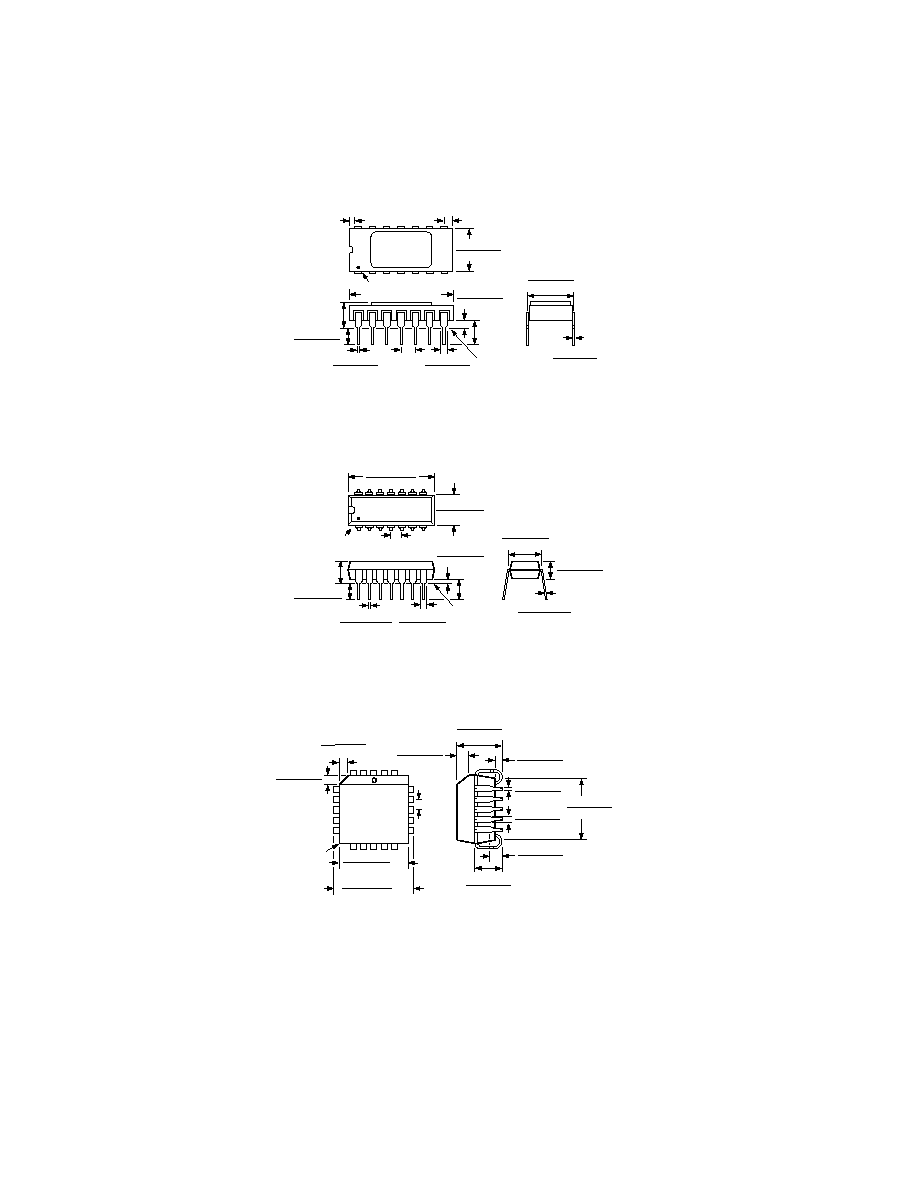
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
14-Lead Ceramic DIP
(D-14)
14
1
7
8
0.098 (2.49) MAX
0.310 (7.87)
0.220 (5.59)
0.005 (0.13) MIN
PIN 1
0.100
(2.54)
BSC
SEATING
PLANE
0.023 (0.58)
0.014 (0.36)
0.060 (1.52)
0.015 (0.38)
0.200 (5.08)
MAX
0.200 (5.08)
0.125 (3.18)
0.070 (1.78)
0.030 (0.76)
0.150
(3.81)
MAX
0.785 (19.94) MAX
0.320 (8.13)
0.290 (7.37)
0.015 (0.38)
0.008 (0.20)
14-Lead Plastic DIP
(N-14)
14
1
7
8
PIN 1
0.795 (20.19)
0.725 (18.42)
0.280 (7.11)
0.240 (6.10)
0.100 (2.54)
BSC
SEATING
PLANE
0.060 (1.52)
0.015 (0.38)
0.210 (5.33)
MAX
0.022 (0.558)
0.014 (0.356)
0.160 (4.06)
0.115 (2.93)
0.070 (1.77)
0.045 (1.15)
0.130
(3.30)
MIN
0.195 (4.95)
0.115 (2.93)
0.015 (0.381)
0.008 (0.204)
0.325 (8.25)
0.300 (7.62)
20-Lead PLCC
(P-20A)
3
PIN 1
IDENTIFIER
4
19
18
8
9
14
13
TOP VIEW
(PINS DOWN)
0.395 (10.02)
0.385 (9.78)
SQ
0.356 (9.04)
0.350 (8.89)
SQ
0.048 (1.21)
0.042 (1.07)
0.048 (1.21)
0.042 (1.07)
0.020
(0.50)
R
0.050
(1.27)
BSC
0.021 (0.53)
0.013 (0.33) 0.330 (8.38)
0.290 (7.37)
0.032 (0.81)
0.026 (0.66)
0.180 (4.57)
0.165 (4.19)
0.040 (1.01)
0.025 (0.64)
0.056 (1.42)
0.042 (1.07)
0.025 (0.63)
0.015 (0.38)
0.110 (2.79)
0.085 (2.16)