
Features
eroflex Circuit Technology ≠ MIPS RISC Microprocessors © SCD7000SC REV B 7/30/01
Pad Buffer
Address Buffer
BLOCK DIAGRAM
Full militarized QED RM7000 microprocessor
Dual Issue symmetric superscalar microprocessor with
instruction prefetch optimized for system level
price/performance
150, 200, 210, 225 MHz operating frequency
Consult Factory for latest speeds
MIPS IV Superset Instruction Set Architecture
High performance interface (RM52xx compatible)
600 MB per second peak throughput
75 MHz max. freq., multiplexed address/data
Supports 1/2 clock multipliers (2, 2.5, 3, 3.5, 4, 4.5, 5, 6, 7, 8, 9)
IEEE 1149.1 JTAG (TAP) boundary scan
Integrated primary and secondary caches - all are 4-way set
associative with 32 byte line size
16KB instruction
16KB data: non-blocking and write-back or write-through
256KB on-chip secondary: unified, non-blocking, block writeback
MIPS IV instruction set
Data PREFETCH instruction allows the processor to overlap cache
miss latency and instruction execution
Floating point combined multiply-add instruction increases
performance in signal processing and graphics applications
Conditional moves reduce branch frequency
Index address modes (register + register)
Embedded supply de-coupling capacitors and additional PLL
filter components
Integrated memory management unit (ACT52xx compatible)
Fully associative joint TLB (shared by I and D translations)
48 dual entries map 96 pages
4 entry DTLB and 4 entry ITLB
Variable page size (4KB to 16MB in 4x increments)
Embedded application enhancements
Specialized DSP integer Multiply-Accumulate instruction,
(MAD/MADU) and three-operand multiply instruction (MUL/U)
Per line cache locking in primaries and secondary
Bypass secondary cache option
I&D Test/Break-point (Watch) registers for emulation & debug
Performance counter for system and software tuning & debug
Ten fully prioritized vectored interrupts - 6 external, 2 internal, 2
software
Fast Hit-Writeback-Invalidate and Hit-Invalidate cache operations
for efficient cache management
High-performance floating point unit - 600 M FLOPS
maximum
Single cycle repeat rate for common single-precision operations
and some double-precision operations
Single cycle repeat rate for single-precision combined multiply-
add operations
Two cycle repeat rate for double-precision multiply and
double-precision combined multiply-add operations
Fully static CMOS design with dynamic power down logic
Standby reduced power mode with WAIT instruction
4 watts typical @ 2.5V Int., 3.3V I/O, 200MHz
208-lead CQFP, cavity-up package (F17)
208-lead CQFP, inverted footprint (F24), with the same pin
rotation as the commercial QED RM5261
64-Bit Superscaler Microprocessor
ACT 7000SC
A/D Bus
Pad Bus
M-Pipe Bus
DVA
D Bus
F-Pipe Bus
ITag
DTLB
DTag
ITLB
Set B
Secondary Tags
Set A
Secondary Tags
Set C
Secondary Tags
Set D
Secondary Tags
4 - Way Set Associative
Primary Data Cache
On - Chip 256K Byte Secondary Cache, 4 - Way Set Associative
4 - Way Set Associative
Primary Instruction Cache
Store Buffer
Write Buffer
Read Buffer
Prefetch Buffer
Instruction Dispatch Unit
M Pipe Register
F Pipe Register
F
l
oa
ti
ng
-
P
o
i
nt C
o
ntr
o
l
Floating-Point
Load / Align
Floating-Point
Register File
Packer / Unpacker
Comparator
Floating-Point
MultAdd, Add, Sub,
Cvt, Div, Sqrt
Multiplier Array
IVA
Program Counter
ITLB Virtuals
Branch PC Adder
PC Incrementer
System / Memory
Control
Joint TLB
Coprocessor 0
Int Mult. Div. Madd
PLL/Clocks
FA Bus
Intege
r
C
o
ntr
o
l
Load Aligner
Integer Register File
M Pipe
F Pipe
DTLB Virtuals
Adder
StAin/Sh
Shifter
Adder
Logicals
Logicals
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
2
DESCRIPTION
The ACT 7000SC is a highly integrated symmetric
superscalar microprocessor capable of issuing two
instructions each processor cycle. It has two high
performance 64-bit integer units as well as a high
throughput, fully pipelined 64-bit floating point unit. To
keep its multiple execution units running efficiently,
the ACT 7000SC integrates not only 16KB 4-way set
associative instruction and data caches but backs
them up with an integrated 256KB 4-way set
associative secondary as well. For maximum
efficiency, the data and secondary caches are
writeback and nonblocking. A RM52XX family
compatible, operating system friendly memory
management unit with a 64/ 48-entry fully associative
TLB and a high-performance 64-bit system interface
supporting hardware prioritized and vectored
interrupts round out the main features of the
processor.
The ACT 7000SC is ideally suited for highend
embedded control applications such as
internetworking, high performance image
manipulation, high speed printing, and 3-D
visualization.
HARDWARE OVERVIEW
The ACT 7000SC offers a high-level of integration
targeted at high-performance embedded
applications. The key elements of the ACT 7000SC
are briefly described below.
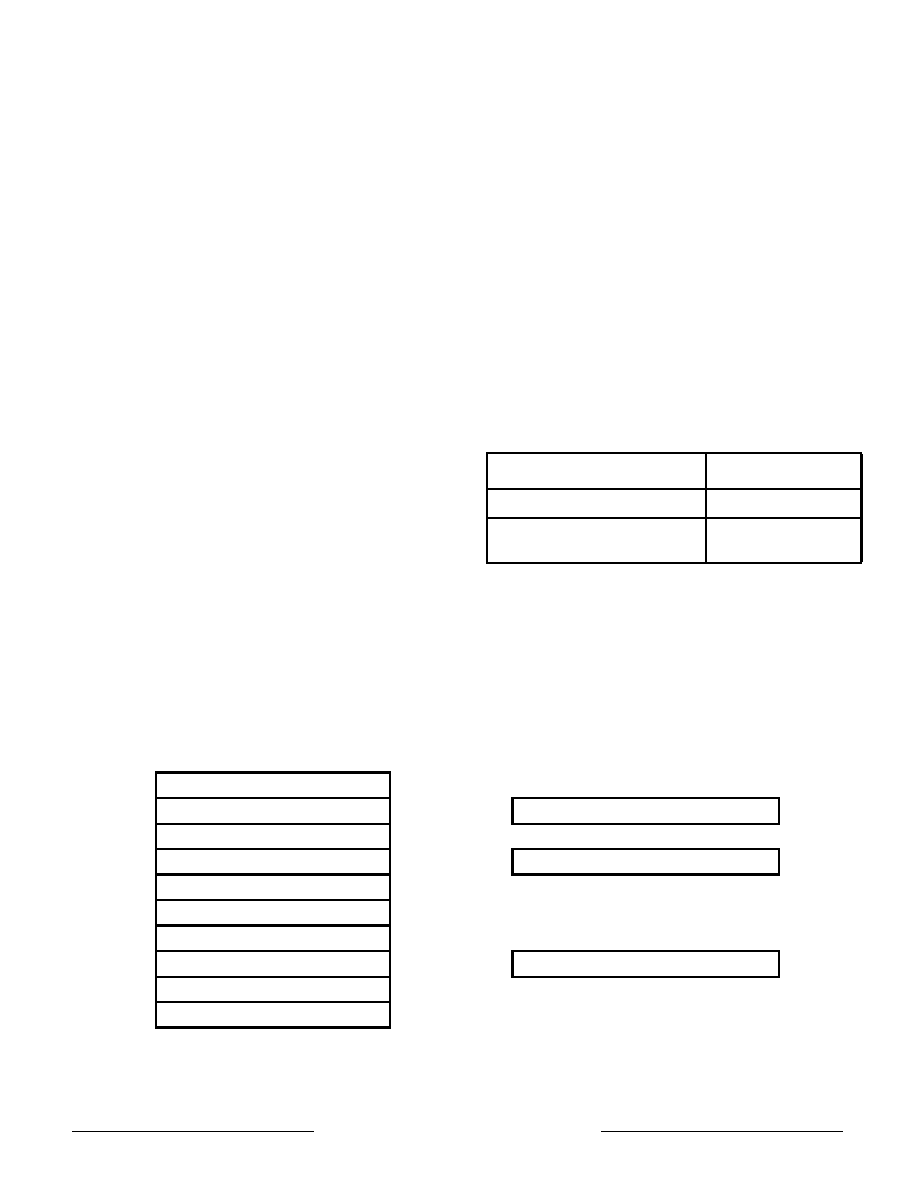
CPU Registers
Like all MIPS ISA processors, the ACT 7000SC
CPU has a simple, clean user visible state consisting
of 32 general purpose registers, or GPR's, two special
purpose registers for integer multiplication and
division, and a program counter; there are no
condition code bits. Figure 1 shows the user visible
state.
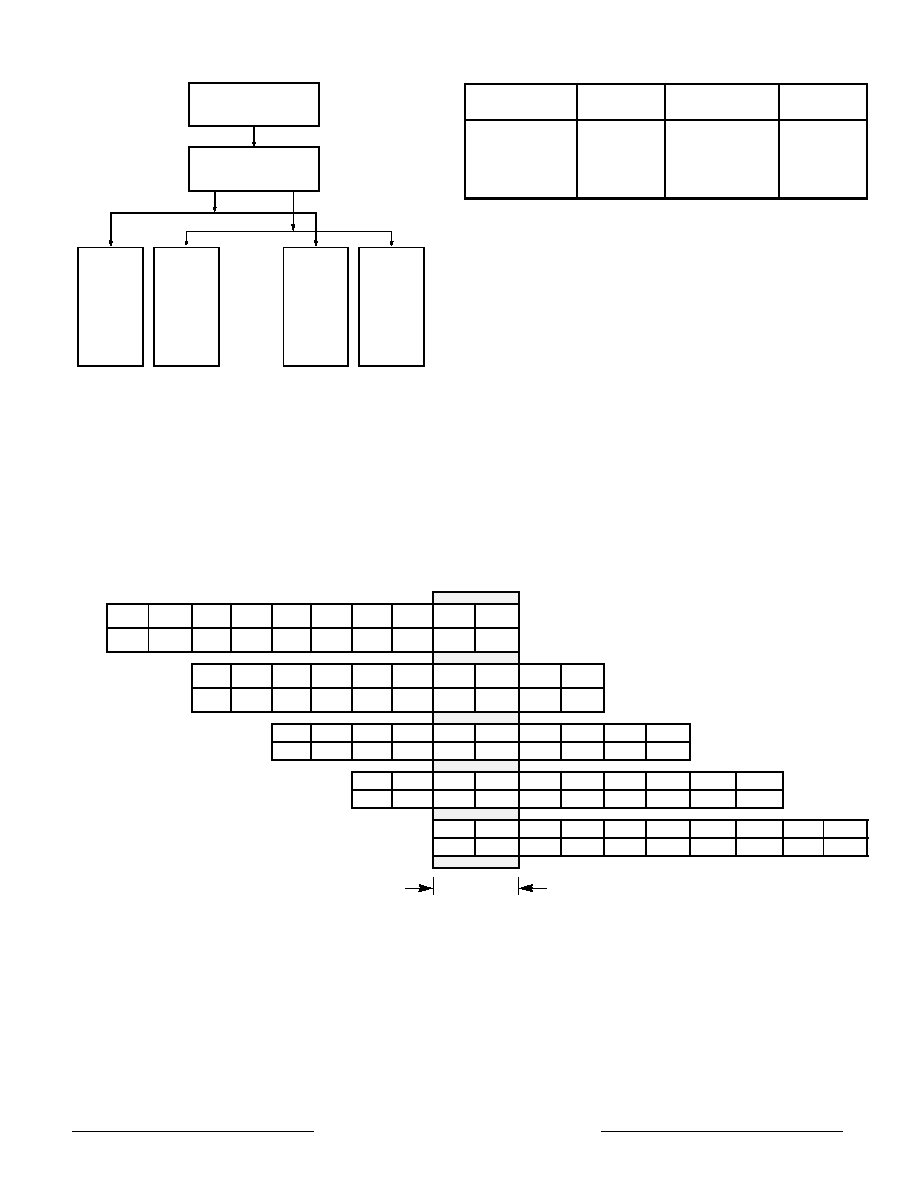
Superscalar Dispatch
The ACT 7000SC has an efficient symmetric
superscalar dispatch unit which allows it to issue up to
two instructions per cycle. For purposes of instruction
issue, the ACT 7000SC defines four classes of
instructions: integer, load/store, branches, and
floating-point. There are two logical pipelines, the
function, or F, pipeline and the memory, or M,
pipeline. Note however that the M pipe can execute
integer as well as memory type instructions.
Figure 2 is a simplification of the pipeline section
and illustrates the basics of the instruction issue
mechanism.
Table 1 ≠ Instruction Issue Rules
F Pipe
M Pipe
one of:
one of:
integer, branch, floating-point,
integer mul, div
integer, load/store
General Purpose Registers
63
0
Multiply/Divide Registers
0
63
0
r1
HI
r2
63
0
∑
LO
∑
∑
Program Counter
∑
63
0
r29
PC
r30
r31
Figure 1 ≠ CP0 Registers
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
3
The figure illustrates that one F pipe instruction and
one M pipe instruction can be issued concurrently but
that two M pipe or two F pipe instructions cannot be
issued. Table 2 specifies more completely the
instructions within each class.
.
The symmetric superscalar capability of the ACT
7000SC, in combination with its low latency integer
execution units and high-throughput fully pipelined
floating-point execution unit, provides unparalleled
price/performance in computational intensive
embedded applications.
Pipeline
The logical length of both the F and M pipelines is
five stages with state committing in the register write,
or W, pipe stage. The physical length of the
floating-point execution pipeline is actually seven
stages but this is completely transparent to the user.
Figure 3 shows instruction execution within the
ACT 7000SC when instructions are issuing
simultaneously down both pipelines. As illustrated in
the figure, up to ten instructions can be executing
simultaneously. This figure presents a somewhat
simplistic view of the processors operation however
since the out-of-order completion of loads, stores, and
Figure 2 ≠ Instruction Issue Paradigm
FP
F Pipe
F Pipe IBus
M Pipe IBus
FP
M Pipe
Integer
F Pipe
Integer
M Pipe
Dispatch
Unit
Instruction
Cache
Table 2 ≠ Dual Issue Instruction Classes
integer
load/store
floating-point
branch
add, sub, or, xor,
shift, etc.
lw, sw, ld, sd,
ldc1, sdc1,
mov, movc,
fmov, etc.
fadd, fsub, fmult,
fmadd, fdiv, fcmp,
fsqrt, etc.
beq, bne,
bCzT, bCzF, j,
etc.
I0
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I1
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I2
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I3
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I4
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I5
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I6
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I7
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I8
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
I9
1l
2l
1R
2R
1A
2A
1D
2D
1W
2W
one cycle
1I-1R:
2I:
2R:
1A:
1A:
1A-2A:
2A:
2A-2D:
1D:
2W:
Instruction cache access
Instruction virtual to physical address translation
Register file read, Bypass calculation, Instruction decode, Branch address calculation
Issue or slip decision, Branch decision
Data virtual address calculation
Integer add, logical, shift
Store Align
Data cache access and load align
Data virtual to physical address translation
Register file write
Figure 3 ≠ Pipeline

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
4
long latency floating-point operations can result in
there being even more instructions in process than
what is shown.
Note that instruction dependencies, resource
conflicts, and branches result in some of the
instruction slots being occupied by NOPs.
Integer Unit
Like the ACT 52xx family, the ACT 7000SC
implements the MIPS IV Instruction Set Architecture,
and is therefore fully upward compatible with
applications that run on processors such as the
R4650 and R4700 that implement the earlier
generation MIPS III Instruction Set Architecture.
Additionally, the ACT 7000SC includes two
implementation specific instructions not found in the
baseline MIPS IV ISA, but that are useful in the
embedded market place. Described in detail in a later
section of this datasheet, these instructions are
integer multiply-accumulate and three-operand
integer multiply.
The ACT 7000SC integer unit includes thirty-two
general purpose 64-bit registers, the HI/LO result
registers for the two-Pipeline operand integer
multiply/divide operations, and the program counter,
or PC. There are two separate execution units, one of
which can execute function, or F, type instructions
and one which can execute memory, or M, type
instructions. See above for a description of the
instruction types and the issue rules. As a special
case, integer multiply/divide instructions as well as
their corresponding MFHi and MFLo instructions can
only be executed in the F type execution unit. Within
each execution unit the operational characteristics
are the same as on previous QED designs with single
cycle ALU operations (add, sub, logical, shift), one
cycle load delay, and an autonomous multiply/divide
unit.
Register File
The ACT 7000SC has thirty-two general purpose
registers with register location (r0) hard wired to zero
value. These registers are used for scalar integer
operations and address calculation. In order to
service the two integer execution units, the register
file has four read ports and two write ports and is fully
bypassed both within and between the two execution
units to minimize operation latency in the pipeline.
ALU
The ACT 7000SC has two complete integer ALU's
each consisting of an integer adder/subtractor, a logic
unit, and a shifter. Table 3 shows the functions
performed by the ALU's for each execution unit. Each
of these units is optimized to perform all operations in
a single processor cycle.
Integer Multiply/Divide
The ACT 7000SC has a single dedicated integer
multiply/divide unit optimized for high-speed multiply
and multiply-accumulate operations. The
multiply/divide unit resides in the F type execution
unit. Table 4 shows the performance of the
multiply/divide unit on each operation.
The baseline MIPS IV ISA specifies that the results
of a multiply or divide operation be placed in the Hi
and Lo registers. These values can then be
transferred to the general purpose register file using
the Move-from-Hi and Move-from-Lo (MFHI/MFLO)
instructions.
In addition to the baseline MIPS IV integer multiply
instructions, the ACT 7000SC also implements the
3-operand multiply instruction, MUL. This instruction
specifies that the multiply result go directly to the
integer register file rather than the Lo register. The
portion of the multiply that would have normally gone
into the Hi register is discarded. For applications
where it is known that the upper half of the multiply
result is not required, using the MUL instruction
eliminates the necessity of executing an explicit
MFLO instruction.
Also included in the ACT 7000SC are the
multiply-add instructions MAD/MADU. This
instruction multiplies two operands and adds the
resulting product to the current contents of the Hi and
Lo registers. The multiply-accumulate operation is the
core primitive of almost all signal processing
algorithms allowing the ACT 7000SC to eliminate the
need for a separate DSP engine in many embedded
applications.
Table 3 ≠ ALU Operations
Unit
F Pipe
M Pipe
Adder
add, sub
add, sub, data address
add
Logic
logic, moves, zero shifts
(nop)
logic, moves, zero shifts
(nop)
Shifter
non zero shift
non zero shift, store
align
Table 4 ≠ Integer Multiply / Divide Operations
Opcode
Operand
Size
Latency
Repeat
Rate
Stall
Cycles
MULT/U,
MAD/U
16 bit
4
3
0
32 bit
5
4
0
MUL
16 bit
4
3
2
32 bit
5
4
3
DMULT,
DMULTU
any
9
8
0
DIV, DIVD
any
36
36
0
DDIV,
DDIVU
any
68
68
0

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
5
By pipelining the multiply-accumulate function and
dynamically determining the size of the input
operands, the ACT 7000SC is able to maximize
throughput while still using an area efficient
implementation.
Floating-Point Coprocessor
The ACT 7000SC incorporates a high-performance
fully pipe-lined floating-point coprocessor which
includes a floating-point register file and autonomous
execution units for multiply/ add/convert and
divide/square root. The floating-point coprocessor is a
tightly coupled co-execution unit, decoding and
executing instructions in parallel with, and in the case
of floating-point loads and stores, in cooperation with
the M pipe of the integer unit. As described earlier, the
superscalar capabilities of the ACT 7000SC allow
floating-point computation instructions to issue
concurrently with integer instructions.
Floating-Point Unit
The ACT 7000SC floating-point execution unit
supports single and double precision arithmetic, as
specified in the IEEE Standard 754. The execution
unit is broken into a separate divide/square root unit
and a pipelined multiply/add unit. Overlap of
divide/square root and multiply/add is supported.
The ACT 7000SC maintains fully precise
floating-point exceptions while allowing both
overlapped and pipelined operations. Precise
exceptions are extremely important in object-oriented
programming environments and highly desirable for
debugging in any environment.
The floating-point unit's operation set includes
floating-point add, subtract, multiply, multiply-add,
divide, square root, reciprocal, reciprocal square root,
conditional moves, conversion between fixed-point
and floating-point format, conversion between
floating-point formats, and floating-point compare.
Table 5 gives the latencies of the floating-point
instructions in internal processor cycles.
Floating-Point General Register File
The floating-point general register file, FGR, is
made up of thirty-two 64-bit registers. With the
floating-point load and store double instructions,
LDC1 and SDC1, the floating-point unit can take
advantage of the 64-bit wide data cache and issue a
floating-point coprocessor load or store double-word
instruction in every cycle.
The floating-point control register file contains two
registers; one for determining configuration and
revision information for the coprocessor and one for
control and status information. These registers are
primarily used for diagnostic software, exception
handling, state saving and restoring, and control of
rounding modes.
To support superscalar operations, the FGR has
four read ports and two write ports, and is fully
bypassed to minimize operation latency in the
pipeline. Three of the read ports and one write port
are used to support the combined multiply-add
instruction while the fourth read and second write port
allows a concurrent floating-point load or store and
conditional moves.
System Control Coprocessor (CP0)
The system control coprocessor (CP0) in the MIPS
architecture is responsible for the virtual memory
sub-system, the exception control system, and the
diagnostics capability of the processor. In the MIPS
architecture, the system control coprocessor (and
thus the kernel software) is implementation
dependent. For memory management, the ACT
7000SC CP0 is logically identical to that of the
RM5200 Family and R5000. For interrupt exceptions
and diagnostics, the ACT 7000SC is a superset of the
RM5200 Family and R5000 implementing additional
features described later in the sections on Interrupts,
the Test/Breakpoint facility, and the Performance
Counter facility.
The memory management unit controls the virtual
memory system page mapping. It consists of an
instruction address translation buffer, or ITLB, a data
Table 5 ≠ Floating Point Latencies and
Repeat Rates
Operation
Latency
single/double
Repeat Rate
single/double
fadd
4
1
fsub
4
1
fmult
4/5
1/2
fmadd
4/5
1/2
fmsub
4/5
1/2
fdiv
21/36
19/34
fsqrt
21/36
19/34
frecip
21/36
19/34
frsqrt
38/68
36/66
fcvt.s.d
4
1
fcvt.s.w
6
3
fcvt.s.l
6
3
fcvt.d.s
4
1
fcvt.d.w
4
1
fcvt.d.l
4
1
fcvt.w.s
4
1
fcvt.w.d
4
1
fcvt.l.s
4
1
fcvt.l.d
4
1
fcmp
1
1
fmov, fmovc
1
1
fabs, fneg
1
1
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
6
address translation buffer, or DTLB, a Joint TLB, or
JTLB, and coprocessor registers used by the virtual
memory mapping sub-system.
System Control Coprocessor Registers
The ACT 7000SC incorporates all system control
coprocessor (CP0) registers internally. These
registers provide the path through which the virtual
memory system's page mapping is examined and
modified, exceptions are handled, and operating
modes are controlled (kernel vs. user mode,
interrupts enabled or disabled, cache features). In
addition, the ACT 7000SC includes registers to
implement a real-time cycle counting facility, to aid in
cache and system diagnostics, and to assist in data
error detection.
To support the non-blocking caches and enhanced
interrupt handling capabilities of the ACT 7000SC,
both the data and control register spaces of CP0 are
supported by the ACT 7000SC. In the data register
space, that is the space accessed using the MFC0
and MTC0 instructions, the ACT 7000SC supports the
same registers as found in the RM5200, R4000 and
R5000 families. In the control space, that is the space
accessed by the previously unused CTC0 and CFC0
instructions, the ACT 7000SC supports five new
registers. The first three of these new 32-bit registers
support the enhanced interrupt handling capabilities
and are the Interrupt Control, Interrupt Priority Level
Lo (IPLLO), and Interrupt Priority Level Hi (IPLHI)
registers. These registers are described further in the
section on interrupt handling. The other two registers,
Imprecise Error 1 and Imprecise Error 2, have been
added to help diagnose bus errors which occur on
non-blocking memory references.
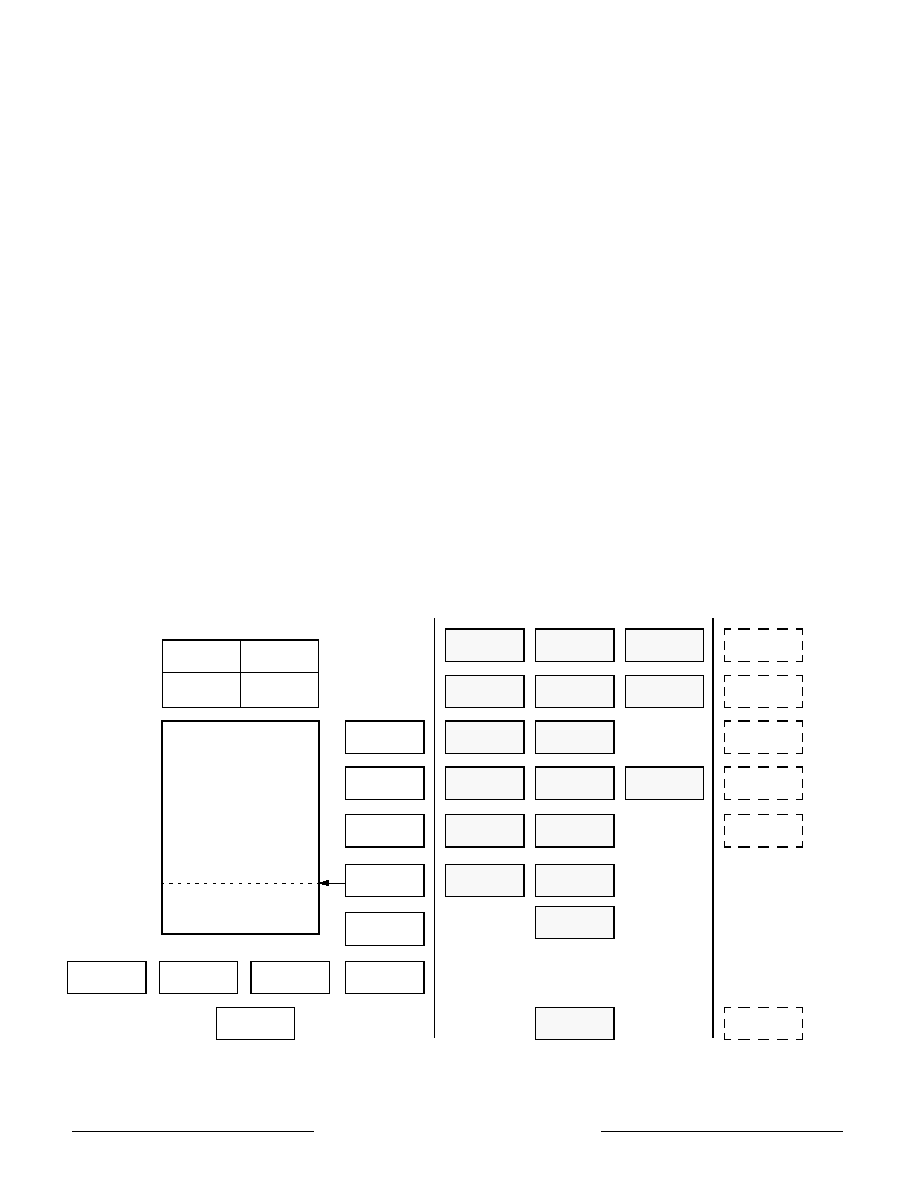
Figure 4 shows the CP0 registers.
Virtual to Physical Address Mapping
The ACT 7000SC provides three modes of virtual
addressing:
∑ user mode
∑ supervisor mode
∑ kernel mode
This mechanism is available to system software to
provide a secure environment for user processes. Bits
in the CP0 Status register determine which virtual
addressing mode is used. In the user mode, the ACT
7000SC provides a single, uniform virtual address
space of 256GB (2GB in 32-bit mode).
When operating in the kernel mode, four distinct
virtual address spaces, totalling 1024GB (4GB in
32-bit mode), are simultaneously available and are
differentiated by the high-order bits of the virtual
address.
The ACT 7000SC processor also supports a
supervisor mode in which the virtual address space is
256.5GB (2.5GB in 32-bit mode), divided into three
regions based on the high-order bits of the virtual
address. Figure 5 shows the address space layout for
32-bit operation.
Info
7*
Index
0*
Random
1*
Wired
6*
PRid
15*
LLAddr
17*
TagLo
28*
TagHi
29*
EPC
14*
ECC
26*
Status
12*
Context
4*
Count
9*
BadVAddr
8*
Compare
11*
Cause
13*
Watch1
18*
Watch2
19*
ErrorEPC
30*
Config
16*
Perf Counter
25*
Perf Ctr Cntrl
22*
Watch Mask
24*
IPLHI
19*
IPLLO
18*
IntControl
20*
Imp Error 1
26*
Imp Error 2
27*
PageMask
5*
EntryHi
10*
EntryLo1
3*
EntryLo0
2*
TLB
(entries protected
from TLBWR)
Used for memory
management
* Registered number
Used for exception
processing
Control Space Registers
Xcontext
20*
CacheErr
27*
47
0
Figure 4 ≠ CP0 Registers

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
7
When the ACT 7000SC is configured for 64-bit
addressing, the virtual address space layout is an
upward compatible extension of the 32-bit virtual
address space layout.
Joint TLB
For fast virtual-to-physical address translation, the
ACT 7000SC uses a large, fully associative TLB that
maps virtual pages to their corresponding physical
addresses. As indicated by its name, the joint TLB
(JTLB) is used for both instruction and data
translations. The JTLB is organized as pairs of
even/odd entries, and maps a virtual address and
address space identifier into the large, 64GB physical
address space. By default, the JTLB is configured as
48 pairs of even/odd entries. The 64 even/odd entry
optional configuration is set at boot time.
Two mechanisms are provided to assist in
controlling the amount of mapped space, and the
replacement characteristics of various memory
regions. First, the page size can be configured, on a
per-entry basis, to use page sizes in the range of 4KB
to 16MB (in 4X multiples). A CP0 register, PageMask,
is loaded with the desired page size of a mapping,
and that size is stored into the TLB along with the
virtual address when a new entry is written. Thus,
operating systems can create special purpose maps;
for example, a typical frame buffer can be memory
mapped using only one TLB entry.
The second mechanism controls the replacement
algorithm when a TLB miss occurs. The ACT 7000SC
provides a random replacement algorithm to select a
TLB entry to be written with a new mapping; however,
the processor also provides a mechanism whereby a
system specific number of mappings can be locked
into the TLB, thereby avoiding random replacement.
This mechanism allows the operating system to
guarantee that certain pages are always mapped for
performance reasons and for deadlock avoidance.
This mechanism also facilitates the design of
real-time systems by allowing deterministic access to
critical software.
The JTLB also contains information that controls
the cache coherency protocol for each page.
Specifically, each page has attribute bits to determine
whether the coherency algorithm is: uncached,
write-back, write-through with write-allocate,
write-through without write-allocate, write-back with
secondary bypass. Note that both of the write-through
protocols bypass the secondary cache since it does
not support writes of less than a complete cache line.
These protocols are used for both code and data on
the ACT 7000SC with data using write-back or
write-through depending on the application. The
write-through modes support the same efficient frame
buffer handling as the RM5200 Family, R4700 and
R5000.
Instruction TLB
The ACT 7000SC uses a 4-entry instruction TLB
(ITLB) to minimize contention for the JTLB, to
eliminate the critical path of translating through a
large associative array, and to save power. Each ITLB
entry maps a 4KB page. The ITLB improves
performance by allowing instruction address
translation to occur in parallel with data address
translation. When a miss occurs on an instruction
address translation by the ITLB, the least-recently
used ITLB entry is filled from the JTLB. The operation
of the ITLB is completely transparent to the user.
Data TLB
The ACT 7000SC uses a 4-entry data TLB (DTLB)
for the same reasons cited above for the ITLB. Each
DTLB entry maps a 4KB page. The DTLB improves
performance by allowing data address translation to
occur in parallel with instruction address translation.
When a miss occurs on a data address translation by
the DTLB, the DTLB is filled from the JTLB. The DTLB
refill is pseudo-LRU: the least recently used entry of
the least recently used pair of entries is filled. The
operation of the DTLB is completely transparent to the
user.
Figure 5 ≠ Kernel Mode Virtual Addressing
(32-bit mode)
0xFFFFFFFF Kernel virtual address space
(kseg3)
Mapped, 0.5GB
0xE0000000
0xDFFFFFFF Supervisor virtual address space
(ksseg)
Mapped, 0.5GB
0xC0000000
0xBFFFFFFF Uncached kernel physical address space
(kseg1)
Unmapped, 0.5GB
0xA0000000
0x9FFFFFFF
Cached kernel physical address space
(kseg0)
Unmapped, 0.5GB
0x80000000
0x7FFFFFFF
User virtual address space
(kuseg)
Mapped, 2.0GB
0x00000000

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
8
Cache Memory
In order to keep the ACT 7000SC's superscalar
pipeline full and operating efficiently, the ACT
7000SC has integrated primary instruction and data
caches with single cycle access as well as a large
unified secondary cache with a three cycle miss
penalty from the primaries. Each primary cache has a
64-bit read path, a 128-bit write path, and both caches
can be accessed simultaneously. The primary caches
provide the integer and floating-point units with an
aggregate band-width of 3.6 GB per second at an
internal clock frequency of 225 MHz. During an
instruction or data primary cache refill, the secondary
cache can provide a 64-bit datum every cycle
following the initial three cycle latency for a peak
bandwidth of 2.4 GB per second.
Instruction Cache
The ACT 7000SC has an integrated 16KB,
four-way set associative instruction cache and, even
though instruction address translation is done in
parallel with the cache access, the combination of
4-way set associativity and 16KB size results in a
cache which is virtually indexed and physically
tagged. Since the effective physical index eliminates
the potential for virtual aliases in the cache, it is
possible that some operating system code can be
simplified as compared with the RM5200 Family,
R5000 and R4000 class processors.
The data array portion of the instruction cache is 64
bits wide and protected by word parity while the tag
array holds a 24-bit physical address, 14
housekeeping bits, a valid bit, and a single bit of parity
protection.
By accessing 64 bits per cycle, the instruction
cache is able to supply two instructions per cycle to
the superscalar dispatch unit. For signal processing,
graphics, and other numerical code sequences where
a floating-point load or store and a floating-point
computation instruction are being issued together in a
loop, the entire bandwidth available from the
instruction cache will be consumed by instruction
issue. For typical integer code mixes, where
instruction dependencies and other resource
constraints restrict the achievable parallelism, the
extra instruction cache bandwidth is used to fetch
both the taken and non-taken branch paths to
minimize the overall penalty for branches. A 32-byte
(eight instruction) line size is used to maximize the
communication efficiency between the instruction
cache and the secondary cache, or memory system.
The ACT 7000SC is the first MIPS RISC
microprocessor to support cache locking on a per line
basis. The contents of each line of the cache can be
locked by setting a bit in the Tag. Locking the line
prevents its contents from being overwritten by a
subsequent cache miss. Refill will occur only into
unlocked cache lines. This mechanism allows the
programmer to lock critical code into the cache
thereby guaranteeing deterministic behavior for the
locked code sequence.
Data Cache
The ACT 7000SC has an integrated 16KB,
four-way set associative data cache, and even though
data address translation is done in parallel with the
cache access, the combination of 4-way set
associativity and 16KB size results in a cache which
is physically indexed and physically tagged. Since the
effective physical index eliminates the potential for
virtual aliases in the cache, it is possible that some
operating system code can be simplified compared to
the RM5200 Family, R5000 and R4000 class
processors. The data cache is non-blocking; that is, a
miss in the data cache will not necessarily stall the
processor pipeline. As long as no instruction is
encountered which is dependent on the data
reference which caused the miss, the pipeline will
continue to advance. Once there are two cache
misses outstanding, the processor will stall if it
encounters another load or store instruction. A
32-byte (eight word) line size is used to maximize the
communication efficiency between the data cache
and the secondary cache or memory system. The
data array portion of the data cache is 64 bits wide
and protected by byte parity while the tag array holds
a 24-bit physical address, 3 housekeeping bits, a two
bit cache state field, and has two bits of parity
protection. The normal write policy is write-back,
which means that a store to a cache line does not
immediately cause memory to be updated. This
increases system performance by reducing bus traffic
and eliminating the bottleneck of waiting for each
store operation to finish before issuing a subsequent
memory operation. Software can, however, select
write-through on a per-page basis when appropriate,
such as for frame buffers. Cache protocols supported
for the data cache are:
1. Uncached. Reads to addresses in a memory
area identified as uncached will not access the
cache. Writes to such addresses will be written
directly to main memory without updating the
cache.
2. Write-back. Loads and instruction fetches will
first search the cache, reading the next memory
hierarchy level only if the desired data is not
cache resident. On data store operations, the
cache is first searched to determine if the target
address is cache resident. If it is resident, the
cache contents will be updated, and the cache
line marked for later write-back. If the cache
lookup misses, the target line is first brought into
the cache and then the write is performed as
above.
3. Write-through with write allocate. Loads and
instruction fetches will first search the cache,
reading from memory only if the desired data is
not cache resident; write-through data is never
cached in the secondary cache. On data store

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
9
operations, the cache is first searched to
determine if the target address is cache
resident. If it is resident, the primary cache
contents will be updated and main memory will
also be written leaving the write-back bit of the
cache line unchanged; no writes will occur into
the secondary. If the cache lookup misses, the
target line is first brought into the cache and then
the write is performed as above.
4. Write-through without write allocate. Loads
and instruction fetches will first search the
cache, reading from memory only if the desired
data is not cache resident; write-through data is
never cached in the secondary. On data store
operations, the cache is first searched to
determine if the target address is cache
resident. If it is resident, the cache contents will
be updated and main memory will also be
written leaving the write-back bit of the cache
line unchanged; no writes will occur into the
secondary. If the cache lookup misses, then
only main memory is written.
5. Write-back with secondary bypass. Loads and
instruction fetches first search the primary
cache, reading from memory only if the desired
data is not resident; the secondary is not
searched. On data store operations, the primary
cache is first searched to determine if the target
address is resident. If it is resident, the cache
contents are updated, and the cache line
marked for later write-back. If the cache lookup
misses, the target line is first brought into the
cache and then the write is performed as above.
Associated with the Data Cache is the store buffer.
When the ACT 7000SC executes a STORE
instruction, this single-entry buffer gets written with
the store data while the tag comparison is performed.
If the tag matches, then the data is written into the
Data Cache in the next cycle that the Data Cache is
not accessed (the next non-load cycle). The store
buffer allows the ACT 7000SC to execute a store
every processor cycle and to perform back-to-back
stores without penalty. In the event of a store
immediately followed by a load to the same address,
a combined merge and cache write will occur such
that no penalty is incurred.
Secondary Cache
The ACT 7000SC has an integrated 256KB,
four-way set associative, block write-back secondary
cache. The secondary has the same line size as the
primaries, 32 bytes, is logically 64-bits wide matching
the system interface and primary widths, and is
protected with doubleword parity. The secondary tag
array holds a 20-bit physical address, 2 housekeeping
bits, a three bit cache state field, and two parity bits.
By integrating a secondary cache, the ACT 7000SC
is able to dramatically decrease the latency of a
primary cache miss without dramatically increasing
the number of pins and the amount of power required
by the processor. From a technology point of view,
integrating a secondary cache maximally leverages
CMOS semiconductor technology by using silicon to
build the structures that are most amenable to silicon
technology; silicon is being used to build very dense,
low power memory arrays rather than large power
hungry I/O buffers.
Further benefits of an integrated secondary are
flexibility in the cache organization and management
policies that are not practical with an external cache.
Two previously mentioned examples are the 4-way
associativity and write-back cache protocol.
A third management policy for which integration
affords flexibility is cache hierarchy management.
With multiple levels of cache, it is necessary to specify
a policy for dealing with cases where two cache lines
at level n of the hierarchy would, if possible, be
sharing an entry in level n+1 of the hierarchy. The
policy followed by the ACT 7000SC is motivated by
the desire to get maximum cache utility and results in
the ACT 7000SC allowing entries in the primaries
which do not necessarily have a corresponding entry
in the secondary; the ACT 7000SC does not force the
primaries to be a subset of the secondary. For
example, if primary cache line A is being filled and a
cache line already exists in the secondary for primary
cache line B at the location where primary A's line
would reside then that secondary entry will be
replaced by an entry corresponding to primary cache
line A and no action will occur in the primary for cache
line B. This operation will create the aforementioned
scenario where the primary cache line which initially
had a corresponding secondary entry will no longer
have such an entry. Such a primary line is called an
orphan. In general, cache lines at level n+1 of the
hierarchy are called parents of level n's children.
Another ACT 7000SC cache management
optimization occurs for the case of a secondary cache
line replacement where the secondary line is dirty and
has a corresponding dirty line in the primary. In this
case, since it is permissible to leave the dirty line in
the primary, it is not necessary to write the secondary
line back to main memory. Taking this scenario one
step further, a final optimization occurs when the
aforementioned dirty primary line is replaced by
another
line and must be written back, in this case, it
will be written directly to memory bypassing the
secondary cache.
Secondary Caching Protocols
Unlike the primary data cache, the secondary
cache supports only uncached and block write-back.
As noted earlier, cache lines managed with either of
the write-through protocols will not be placed in the
secondary cache. A new caching attribute, write-back
with secondary bypass, allows the secondary to be
bypassed entirely. When this attribute is selected, the
secondarywill not be filled on load misses and will not
be written on dirty write-backs from the primary.

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
10
Cache Locking
The ACT 7000SC allows critical code or data
fragments to be locked into the primary and
secondary caches. The user has complete control
over what locking is performed with cache line
granularity. For instruction and data fragments in the
primaries, locking is accomplished by setting either or
both of the cache lock enable bits in the CP0 ECC
register, specifying the set via a field in the CP0 ECC
register, and then executing either a load instruction
or a Fill_I cache operation for data or instructions
respectively. Only two sets are lockable within each
cache: set A and set B. Locking within the secondary
works identically to the primaries using a separate
secondary lock enable bit and the same set selection
field. As with the primaries, only two sets are lockable:
sets A and B. Table 7 summarizes the cache locking
capabilities.
Cache Management
To improve the performance of critical data
movement operations in the embedded environment,
the ACT 7000SC significantly improves the speed of
operation of certain critical cache management
operations as compared with the R5000 and R4000
families. In particular, the speed of the
Hit-Write-back-Invalidate and Hit-Invalidate cache
operations has been improved in some cases by an
order of magnitude over that of the earlier families.
Table 8 compares the ACT 7000SC with the R4000
and R5000 processors.
For the Hit-Dirty case of Hit-Writeback-Invalidate, if
the writeback buffer is full from some previous cache
eviction then n is the number of cycles required to
empty the write-back buffer. If the buffer is empty then
n is zero.
The penalty value is the number of processor
cycles beyond the one cycle required to issue the
instruction that is required to implement the operation.
Table 6 ≠ Cache Attributes
Attribute
Instruction
Data
Secondary
Size
16KB
16KB
256KB
Associativity
4-way
4-way
4-way
Replacement Algorithm.
cyclic
cyclic
cyclic
Line size
32 byte
32 byte
32 byte
Index
vAddr
11..0
vAddr
11..0
pAddr
15..0
Tag
pAddr
35..12
pAddr
35..12
pAddr
35..16
Write policy
n.a.
write-back, write-through
block write-back, bypass
read policy
n.a.
non-blocking (2 outstanding) non-blocking (data only, 2
outstanding)
read order
critical word first
critical word first
critical word first
write order
NA
sequential
sequential
miss restart following:
complete line
first double (if waiting for
data)
n.a.
Parity
per word
per byte
per doubleword
Table 7 ≠ Cache Locking Control
Cache
Lock
Enable
Set Select
Activate
Primary I
ECC[27]
ECC[28]=
0
A
ECC[28]=
1
B
Fill_I
Primary D
ECC[26]
ECC[28]=
0
A
ECC[28]=
1
B
Load/Store
Secondary
ECC[25] ECC[28]=
0
A
ECC[28]=
1
B
Fill_I or
Load/Store
Table 8 ≠ Penalty Cycle
Operation
Condition
Penalty
ACT 7000S
C
R4000/R500
0
Hit-Writebac
k-Invalidate
Miss
0
7
Hit-Clean
3
12
Hit-Dirty
3+n
14+n
Hit-Invalidate Miss
0
7
Hit
2
9
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
11
Primary Write Buffer
Writes to secondary cache or external memory,
whether cache miss write-backs or stores to
uncached or write-through addresses, use the
integrated primary write buffer. The write buffer holds
up to four 64-bit address and data pairs. The entire
buffer is used for a data cache write-back and allows
the processor to proceed in parallel with memory
update. For uncached and write-through stores, the
write buffer significantly increases performance by
decoupling the SysAD bus transfers from the
instruction execution stream.
System Interface
The ACT 7000SC provides a high-performance
64-bit system interface which is compatible with the
RM5200 Family and R5000. Unlike the R4000 and
R5000 family processors which provide only an
integral multiplication factor between SysClock and
the pipeline clock, the ACT 7000SC also allows
half-integral multipliers, thereby providing greater
granularity in the designers choice of pipeline and
system interface frequencies.
The interface consists of a 64-bit Address/Data bus
with 8 check bits and a 9-bit command bus. In
addition, there are six handshake signals and six
interrupt inputs. The interface has a simple timing
specification and is capable of transferring data
between the processor and memory at a peak rate of
600 MB/sec with a 75 MHz SysClock.
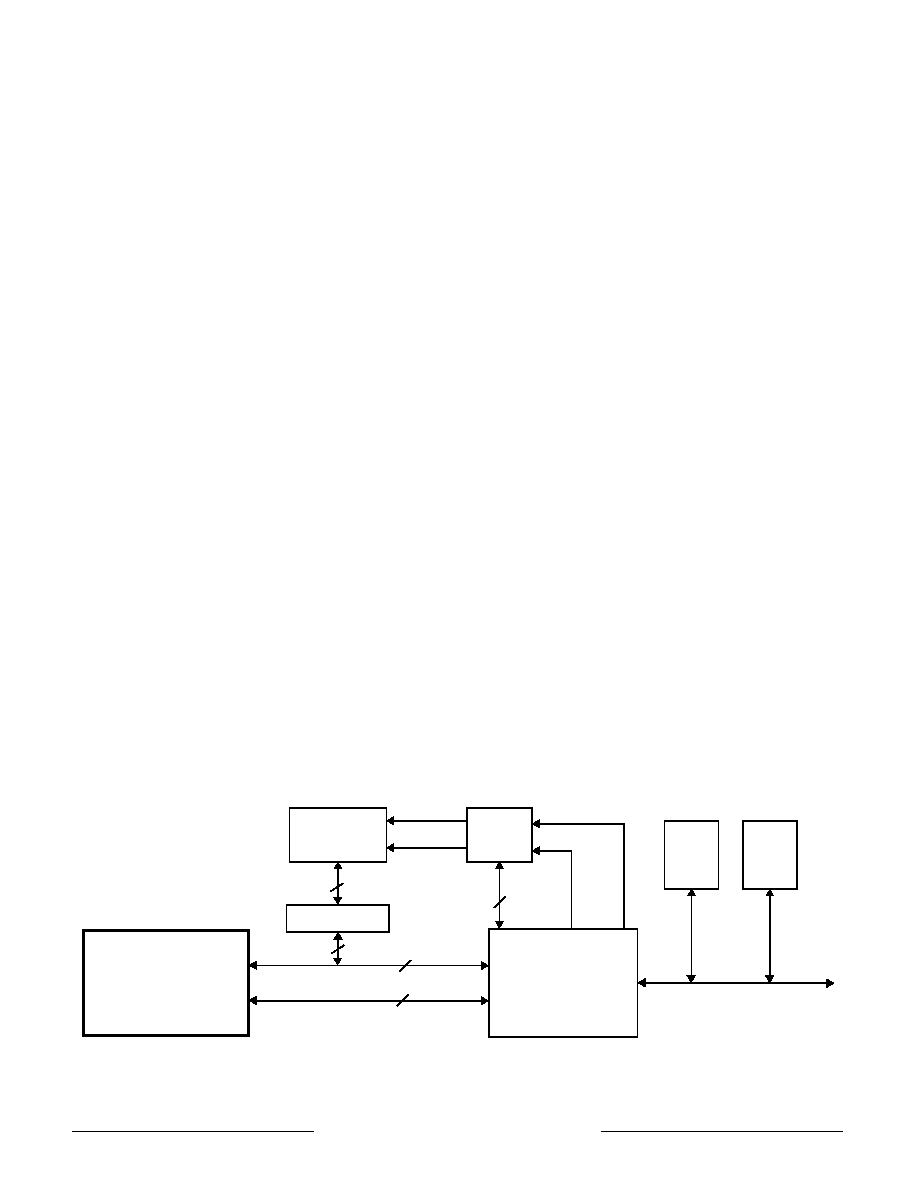
Figure 6 shows a typical embedded system using
the ACT 7000SC. This example shows a system with
a bank of DRAMs, and an interface ASIC which
provides DRAM control as well as an I/O port.
System Address/Data Bus
The 64-bit System Address Data (SysAD) bus is
used to transfer addresses and data between the
ACT 7000SC and the rest of the system. It is
protected with an 8-bit parity check bus, SysADC.
The system interface is configurable to allow easy
interfacing to memory and I/O systems of varying
frequencies. The data rate and the bus frequency at
which the ACT 7000SC transmits data to the system
interface are programmable via boot time mode
control bits. Also, the rate at which the processor
receives data is fully controlled by the external device.
Therefore, either a low cost interface requiring no
read or write buffering or a faster, high-performance
interface can be designed to communicate with the
ACT 7000SC. Again, the system designer has the
flexibility to make these price/performance trade-offs.
System Command Bus
The ACT 7000SC interface has a 9-bit System
Command (SysCmd) bus. The command bus
indicates whether the SysAD bus carries an address
or data. If the SysAD bus carries an address, then the
SysCmd bus also indicates what type of transaction is
to take place (for example, a read or write). If the
SysAD bus carries data, then the SysCmd bus also
gives information about the data (for example, this is
the last data word transmitted, or the data contains an
error). The SysCmd bus is bidirectional to support
both processor requests and external requests to the
ACT 7000SC. Processor requests are initiated by the
ACT 7000SC and responded to by an external
device. External requests are issued by an external
device and require the ACT 7000SC to respond.
The ACT 7000SC supports one to eight byte and
32-byte block transfers on the SysAD bus. In the case
of a sub-double-word transfer, the 3 low-order
address bits give the byte address of the transfer, and
the SysCmd bus indicates the number of bytes being
transferred.
Handshake Signals
There are six handshake signals on the system
interface. Two of these, RdRdy* and WrRdy*, are
used by an external device to indicate to the ACT
7000SC whether it can accept a new read or write
PCI Bus
X
X
Control
DRAM
Latch
72
72
72
25
SysAD Bus
SysCmd
Memory I/O
Controller
Flash /
Address
Boot
ROM
ACT 7000SC
8
Figure 6 ≠ Typical Embedded System Block Diagram
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
12
transaction. The ACT 7000SC samples these signals
before deasserting the address on read and write
requests.
ExtRqst* and Release* are used to transfer control
of the SysAD and SysCmd buses from the processor
to an external device. When an external device needs
to control the interface, it asserts ExtRqst*. The ACT
7000SC responds by asserting Release* to release
the system interface to slave state.
ValidOut* and ValidIn* are used by the ACT
7000SC and the external device respectively to
indicate that there is a valid command or data on the
SysAD and SysCmd buses. The ACT 7000SC
asserts ValidOut* when it is driving these buses with
a valid command or data, and the external device
drives ValidIn* when it has control of the buses and is
driving a valid command or data.
System Interface Operation
The ACT 7000SC can issue read and write
requests to an external device, while an external
device can issue null and write requests to the ACT
7000SC.
For processor reads, the ACT 7000SC asserts
ValidOut* and simultaneously drives the address and
read command on the SysAD and SysCmd buses. If
the system interface has RdRdy* asserted, then the
processor tristates its drivers and releases the system
interface to slave state by asserting Release*. The
external device can then begin sending data to the
ACT 7000SC.
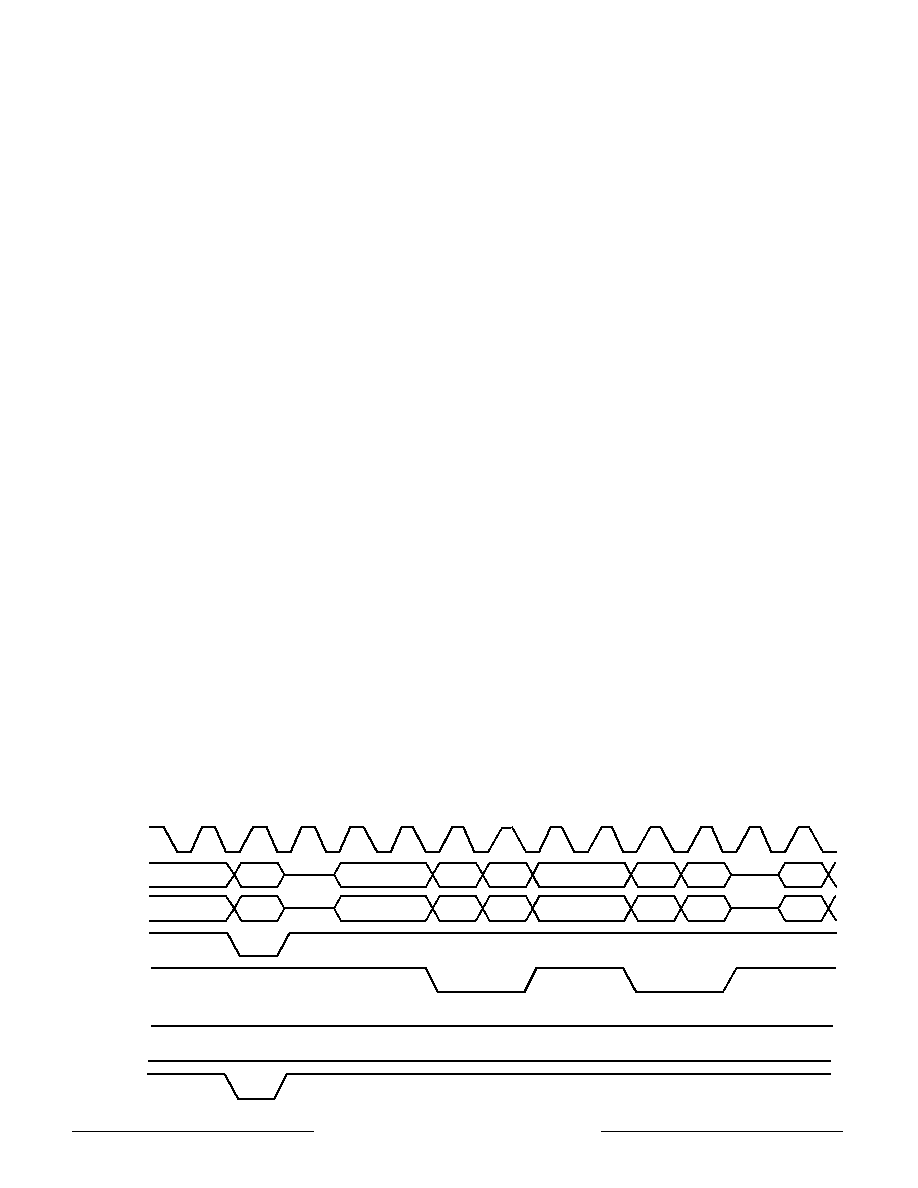
Figure 7 shows a processor block read request and
the external agent read response for a system with a
transaction.
The read latency is 4 cycles (ValidOut* to
ValidIn*), and the response data pattern is DDxxDD.
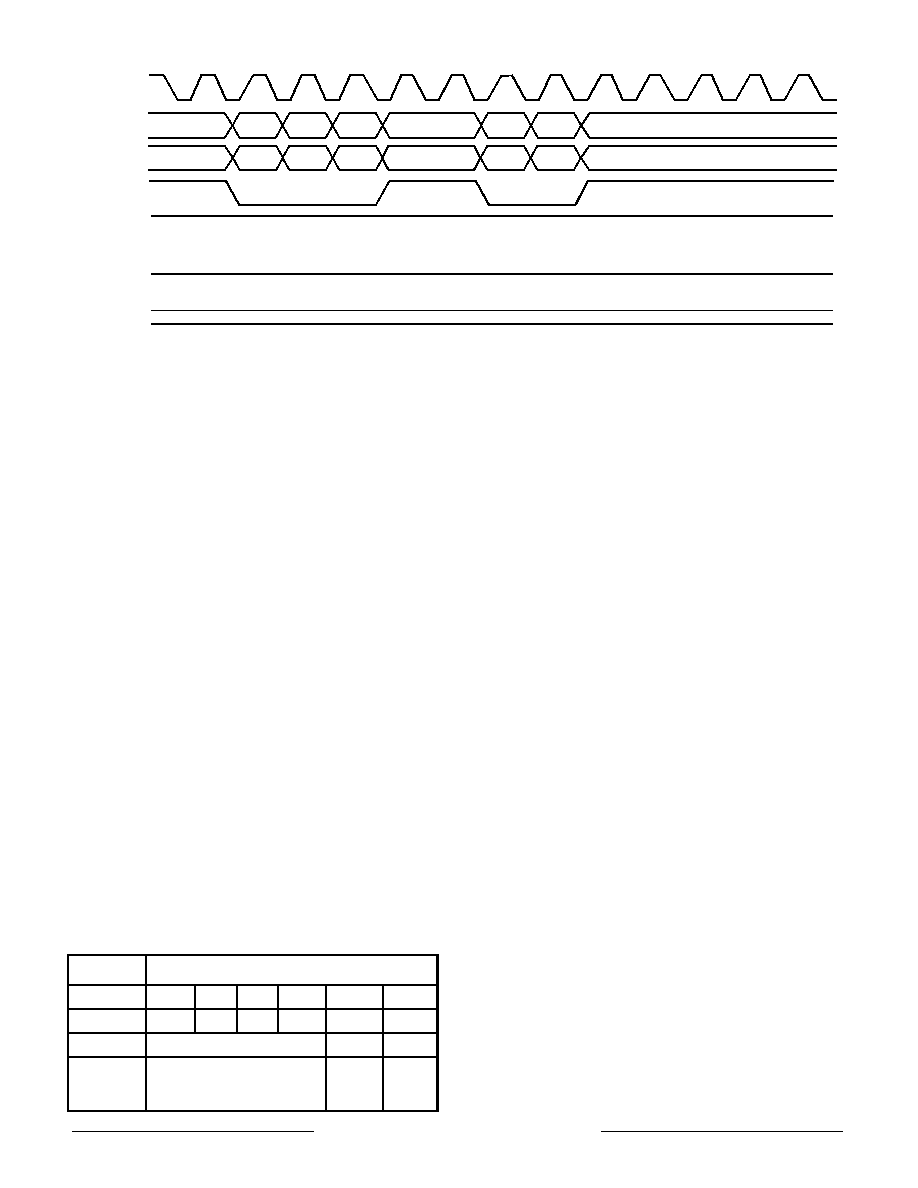
Figure 9 shows a processor block write where the
processor was programmed with write-back data rate
boot code 2, or DDxxD-Dxx.
Data Prefetch
The ACT 7000SC is the first Aeroflex design to
support the MIPS IV integer data prefetch (PREF) and
floating-point data prefetch (PREFX) instructions.
These instructions are used by the compiler or by an
assembly language programmer when it is known or
suspected that an upcoming data reference is going
to miss in the cache. By appropriately placing a
prefetch instruction, the memory latency can be
hidden under the execution of other instructions. If the
execution of a prefetch instruction would cause a
memory management or address error exception the
prefetch is treated as a NOP.
The "Hint" field of the data prefetch instruction is
used to specify the action taken by the instruction.
The instruction can operate normally (that is, fetching
data as if for a load operation) or it can allocate and fill
a cache line with zeroes on a primary data cache
miss.
Enhanced Write Modes
The ACT 7000SC implements two enhancements
to the original R4000 write mechanism: Write Reissue
and Pipeline Writes. In write reissue mode, a write
rate of one write every two bus cycles can be
achieved. A write issues if WrRdy* is asserted two
cycles earlier and is still asserted during the issue
cycle. If it is not still asserted then the last write will
reissue. Pipe-lined writes have the same two bus
cycle write repeat rate, but can issue one additional
write following the deassertion of WrRdy*.
External Requests
The ACT 7000SC can respond to certain requests
issued by an external device. These requests take
one of two forms: Write requests and Null requests.
An external device executes a write request when it
wishes to update one of the processors writable
resources such as the internal interrupt register. A null
request is executed when the external device wishes
the processor to reassert ownership of the processor
external interface. Typically a null request will be
executed after an external device, that has acquired
control of the processor interface via ExtRqst*, has
Data0
nData
Data1
nData
Addr
Read
SysAD
SysCmd
ValidOut*
ValidIn*
RdRdy*
WrRdy*
Release*
SysClock
Data2
Data3
nData NEOD
Figure 7 ≠ Processor Block Read
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
13
completed an independent transaction between itself
and system memory in a system where memory is
connected directly to the SysAD bus. Normally this
transaction would be a DMA read or write from the I/O
system.
Test / Breakpoint Registers
To increase both observability and controllability of
the processor thereby easing hardware and software
debugging, a pair of Test/Break-point, or Watch,
registers, Watch1 and Watch2, have been added to
the ACT 7000SC. Each Watch register can be
separately enabled to watch for a load address, a
store address, or an instruction address. All address
comparisons are done on physical addresses. An
associated register, Watch Mask, has also been
added so that either or both of the Watch registers
can compare against an address range rather than a
specific address. The range granularity is limited to a
power of two.
When enabled, a match of either Watch register
results in an exception. If the Watch is enabled for a
load or store address then the exception is the Watch
exception as defined for the R4000 with Cause
exception code twenty-three. If the Watch is enabled
for instruction addresses then a newly defined
Instruction Watch exception is taken and the Cause
code is sixteen. The Watch register which caused the
exception is indicated by Cause bits 25..24.
Table 9 summarizes a Watch operation.
Performance Counters
Like the Test/Break-point capability described
above, the Performance Counter feature has been
added to improve the observability and controllability
of the processor thereby easing system debug and,
especially in the case of the performance counters,
easing system tuning.
The Performance Counter feature is implemented
using two new CP0 registers, PerfCount and
PerfControl. The PerfCount register is a 32-bit
writable counter which causes an interrupt when bit
31 is set. The PerfControl register is a 32-bit register
containing a five bit field which selects one of
twenty-two event types as well as a handful of bits
which control the overall counting function. Note that
only one event type can be counted at a time and that
counting can occur for user code, kernel code, or
both. The event types and control bits are listed in
Table 10.
Table 9 ≠ Watch Control Register
Register
Bit Field/Function
63 62
61
60:36
35:2 1:0
Watch1, 2 Store Load Instr
0
Addr
0
31:2 1
0
Watch
Mask
Mask Mask
Watch
2
Mask
Watch
1
Data0
Data1
Addr
SysAD
SysCmd
ValidOut*
ValidIn*
RdRdy*
WrRdy*
Release*
SysClock
Data2
Data3
NData NData
Write
NData
NEOD
NData
Figure 8 ≠ Processor Block Write
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
14
The performance counter interrupt will only occur
when interrupts are enabled in the Status register,
IE=1, and Interrupt Mask bit 13 (IM[13]) of the
coprocessor 0 interrupt control register is not set.
Since the performance counter can be set up to
count clock cycles, it can be used as either a) a
second timer or b) a watchdog interrupt. A watchdog
interrupt can be used as an aid in debugging system
or software "hangs." Typically the software is setup to
periodically update the count so that no interrupt will
occur. When a hang occurs the interrupt ultimately
triggers thereby breaking free from the hang-up.
Interrupt Handling
In order to provide better real time interrupt
handling, the ACT 7000SC provides an extended set
of hardware interrupts each of which can be
separately prioritized and separately vectored.
As described above, the performance counter is
also a hardware interrupt source, IP[13]. Also,
whereas the R4000 and R5000 family processors
map the timer interrupt onto IP[7], the ACT 7000SC
provides a separate interrupt, IP[12], for this purpose.
All of these interrupts, IP[13..0], the Performance
Counter, and the Timer, have corresponding interrupt
mask bits, IM[13..0], and interrupt pending bits,
IP[13..0], in the Status, Interrupt Control, and Cause
registers. The bit assignments for the Interrupt
Control and Cause registers are shown in Table 11
and Table 12 below. The Status register has not
changed from the RM5200 Family and R5000, and is
not shown.
The IV bit in the Cause register is the global enable
bit for the enhanced interrupt features. If this bit is
clear then interrupt operation is compatible with the
RM5200 Family and R5000. Although not related to
the interrupt mechanism, note that the W1 and W2
bits indicate which Watch register caused a particular
Watch exception.
In the Interrupt Control register, the interrupt vector
spacing is controlled by the Spacing field as
described below. The Interrupt Mask field (IM[15..8])
contains the interrupt mask for interrupts eight
through thirteen. IM[15..14] are reserved for future
use. The Timer Exclusive (TE) bit if set moves the
Timer interrupt to IP[12]. If clear, the Timer interrupt
will be or'ed into IP[7] as on the R5000.
The Interrupt Control register uses IM13 to enable
the Performance Counter Control.
Priority of the interrupts is set via two new
coprocessor 0 registers called Interrupt Priority Level
Lo, IPLLO, and Interrupt Priority Level Hi, IPLHI.
These two registers contain a four-bit field
corresponding to each interrupt thereby allowing each
interrupt to be programmed with a priority level from 0
to 13 inclusive. The priorities can be set in any
manner including having all the priorities set exactly
the same. Priority 0 is the highest level and priority 15
the lowest. The format of the priority level registers is
shown in Table 13 and Table 14 below. The priority
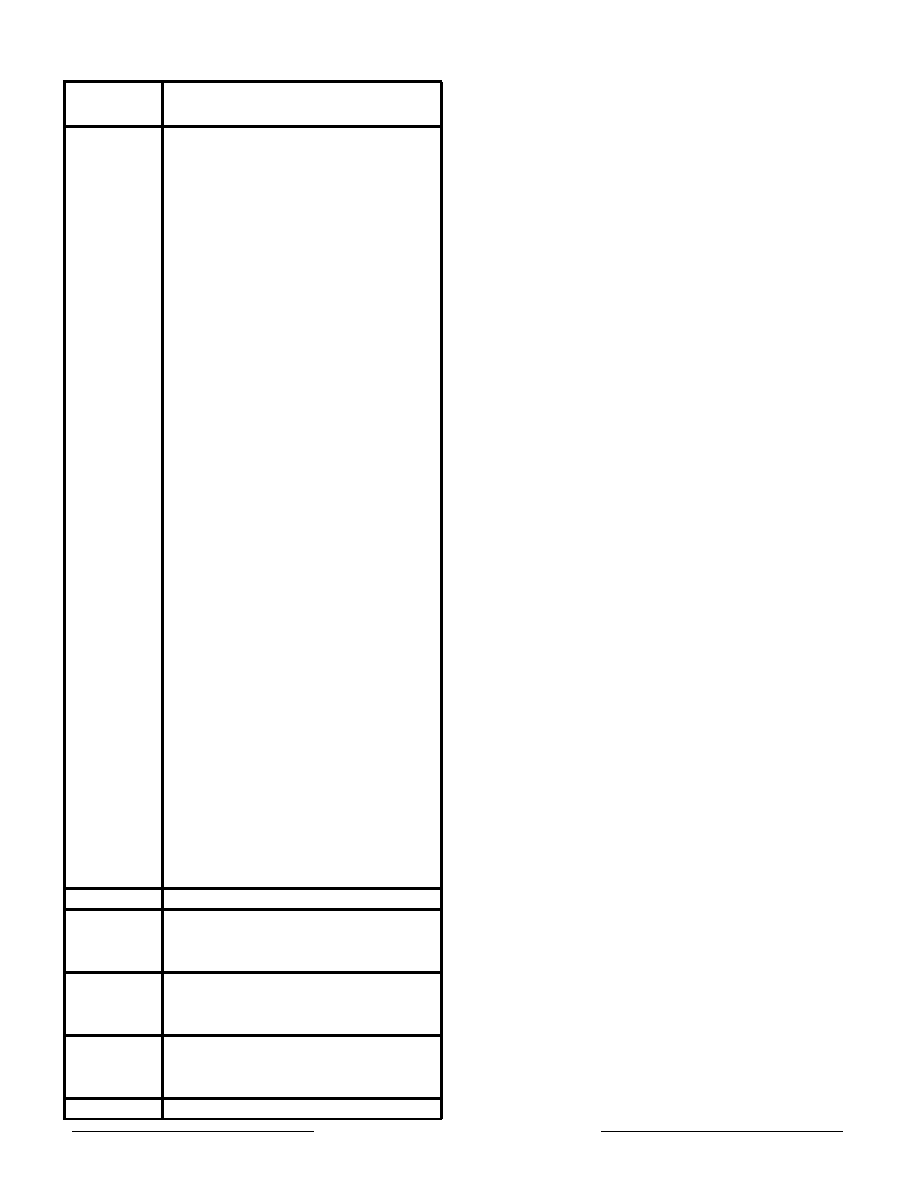
Table 10 ≠ Performance Counter Control
PerfControl
Field
Description
4..0 Event
Type
00: Clock cycles
01: Total instructions issued
02: Floating-point instructions issued
03: Integer instructions issued
04: Load instructions issued
05: Store instructions issued
06: Dual issued pairs
07: Branch prefetches
08: External Cache Misses
09: Stall cycles
0A: Secondary cache misses
0B: Instruction cache misses
0C: Data cache misses
0D: Data TLB misses
0E: Instruction TLB misses
0F: Joint TLB instruction misses
10: Joint TLB data misses
11: Branches taken
12: Branches issued
13: Secondary cache writebacks
14: Primary cache writebacks
15: Dcache miss stall cycles (cycles
where both cache miss tokens
taken and a third address is
requested)
16: Cache misses
17: FP possible exception cycles
18: Slip Cycles due to multiplier busy
19: Coprocessor 0 slip cycles
1A: Slip cycles due to pending
non-blockingloads
1B: Write buffer full stall cycles
1C: Cache instruction stall cycles
1D: Multiplier stall cycles
1E: Stall cycles due to pending
non-blocking loads - stall start of
exception
7..5
Reserved (must be zero)
8
Count in Kernel Mode
0: Disable
1: Enable
9
Count in User Mode
0: Disable
1: Enable
10 Count
Enable
0: Disable
1: Enable
31..11
Reserved (must be zero)
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
15
level registers are located in the coprocessor 0 control
register space. For further details about the control
space see the section describing coprocessor 0.
In addition to programmable priority levels, the ACT
7000SC also permits the spacing between interrupt
vectors to be programmed. For example, the
minimum spacing between two adjacent vectors is
0x20 while the maximum is 0x200. This
programmability allows the user to either set up the
vectors as jumps to the actual interrupt routines or, if
interrupt latency is paramount, to include the entire
interrupt routine at the vector. Table 15 illustrates the
complete set of vector spacing selections along with
the coding as required in the Interrupt Control register
bits 4:0.
In general, the active interrupt priority combined
with the spacing setting generates a vector offset
which is then added to the interrupt base address of
0x200 to generate the interrupt exception offset. This
offset is then added to the exception base to produce
the final interrupt vector address.
Standby Mode
The ACT 7000SC provides a means to reduce the
amount of power consumed by the internal core when
the CPU would not otherwise be performing any
useful operations. This state is known as Standby
Mode.
Executing the WAIT instruction enables interrupts
and enters Standby Mode. When the WAIT instruction
completes the W pipe stage, if the SysAD bus is
currently idle, the internal processor clocks will stop
thereby freezing the pipeline. The phase lock loop, or
PLL, internal timer/ counter, and the "wake up" input
pins: IP[5:0]*, NMI*,
ExtReq*, Reset*, and
ColdReset* continue to operate in their normal
fashion. If the SysAD bus is not idle when the WAIT
instruction completes the W pipe stage, then the
WAIT is treated as a NOP. Once the processor is in
Standby, any interrupt, including the internally
generated timer interrupt, will cause the processor to
exit Standby and resume operation where it left off.
The WAIT instruction is typically inserted in the idle
loop of the operating system or real time executive.
JTAG Interface
The ACT 7000SC interface supports JTAG
boundary scan in conformance with IEEE 1149.1. The
JTAG interface is especially helpful for checking the
integrity of the processor's pin connections.
Boot-Time Options
Fundamental operational modes for the processor
are initialized by the boot-time mode control interface.
The boot-time mode control interface is a serial
interface operating at a very low frequency
(SysClock divided by 256). The low frequency
operation allows the initialization information to be
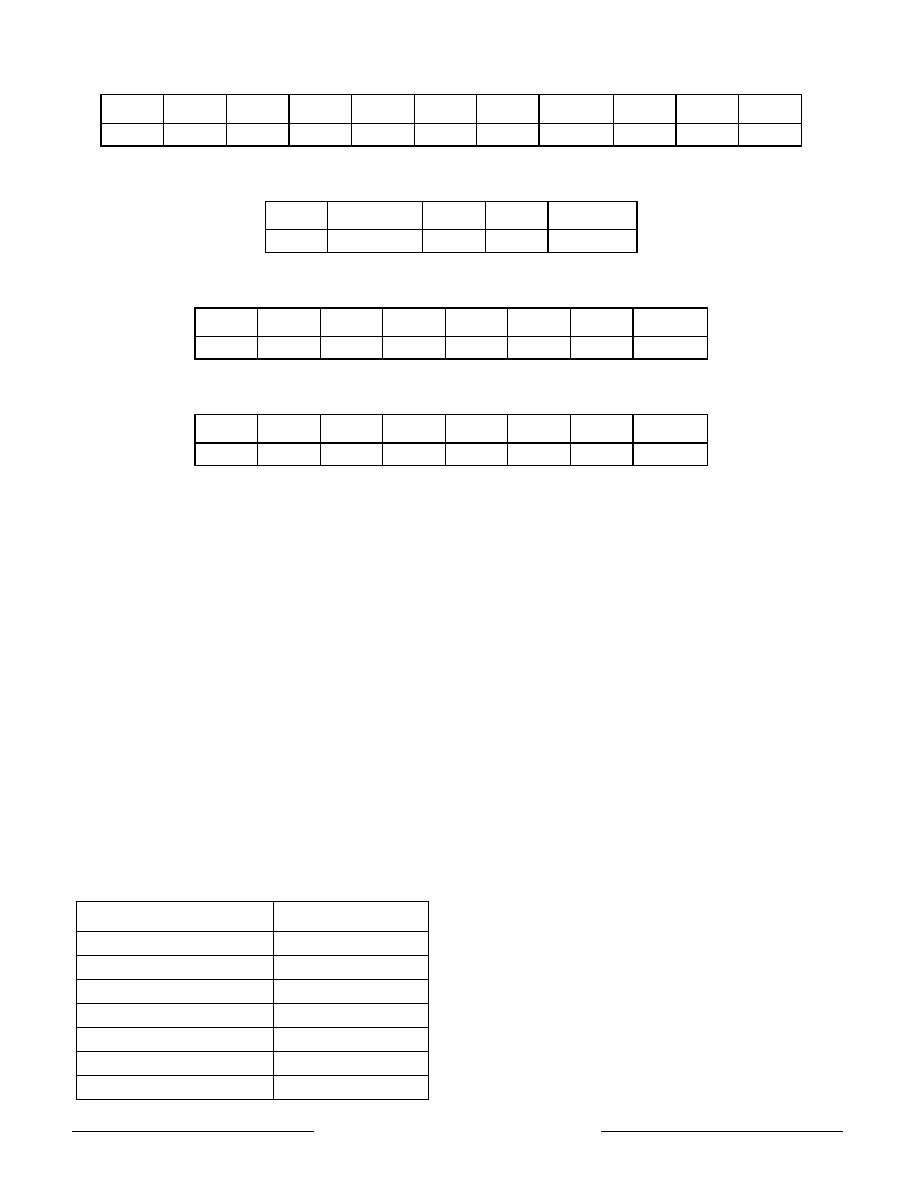
Table 15 ≠ Interrupt Vector Spacing
ICR[4..0] Spacing
0x0 0x000
0x1 0x020
0x2 0x040
0x4 0x080
0x8 0x100
0x10 0x200
others
reserved
Table 11 ≠ Cause Register
31 30
29,28
27 26 25 24 23..8 7 6..2 0,1
BD 0 CE 0
W2
W1
IV
IP[15..0]
0 EXC 0
Table 12 ≠ Interupt Control Register
31..16 15..8
7
6..5 4..00
0
IM[15..8]
TE
0
Spacing
Table 13 ≠ IPLLO Register
31..28
27..24
23..20
19..16
15..12
11..8
7..4
3..0
IPL7
IIPL6
IPL5
IPL4
IPL3
IPL2
IPL1
IPL0
Table 14 ≠ IPLHI Register
31..28
27..24
23..20
19..16
15..12
11..8
7..4
3..0
0
0
IPL13
IPL12
IPL11
IPL10
IPL9
IPL8
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
16
kept in a low cost EPROM; alternatively the twenty or
so bits could be generated by the system interface
ASIC.
Immediately after the VccOK signal is asserted, the
processor reads a serial bit stream of 256 bits to
initialize all the fundamental operational modes.
ModeClock runs continuously from the assertion of
VccOK.
Boot-Time Modes
The boot-time serial mode stream is defined in
Table 16. Bit 0 is the bit presented to the processor
when VccOK is deasserted; bit 255 is the last.
Table 16 ≠ Boot Time Mode Stream
Mode bit
Description
0
Reserved: Must be zero
4..1
Write-back data rate
0:
DDDD
1:
DDxDDx
2:
DDxxDDxx
3:
DxDxDxDx
4:
DDxxxDDxxx
5
DDxxxxDDxxxx
6:
DxxDxxDxxDxx
7:
DDxxxxxxDDxxxxxx
8:
DxxxDxxxDxxxDxxx
9-15:Reserved
7..5
SysClock to Pclock Multiplier
Mode bit 20 = 0 / Mode bit 20 = 1
0:
Multiply by 2/x
1: Multiply by 3/x
2: Multiply by 4/x
3: Multiply by 5/2.5
4: Multiply by 6/x
5: Multiply by 7/3.5
6: Multiply by 8/x
7: Multiply by 9/4.5
8
Specifies byte ordering. Logically ORed
with BigEndian input signal.
0:
Little
endian
1: Big
endian
10..9 Non-Block
Write
Control
00: R4000 compatible non-block writes
01: Reserved
10: pipelined non-block writes
11: non-block write re-issue
11
Timer Interrupt Enable/Disable
0: Enable the timer interrupt on IP[5]
1: Disable the timer interrupt on IP[5]
12
Reserved: Must be zero
14..13
Output driver strength - 100% = fastest
00: 67% strength
01: 50% strength
10: 100% strength
11: 83% strength
15
Reserved must be zero
17..16
System configuration identifiers -
software visible in processor
Config[21..20] register
19..18
Reserved: Must be zero
20
Pclock to SysClock multipliers.
0: Integer
multipliers
(2,3,4,5,6,7,8,9)
1:
Half integer multipliers (2.5,3.5,4.5)
21
External Bus Width.
0: 64-bit
1: 32-bit
23..22
Reserved: Must be zero
24 JTLB
Size.
0: 48
dual-entry
1:
64
dual-entry
25
On-chip secondary cache control.
0: Disable
1: Enable
255..26
Reserved: Must be zero
Table 16 ≠ Boot Time Mode Stream (Cont.)
Mode bit
Description
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
17
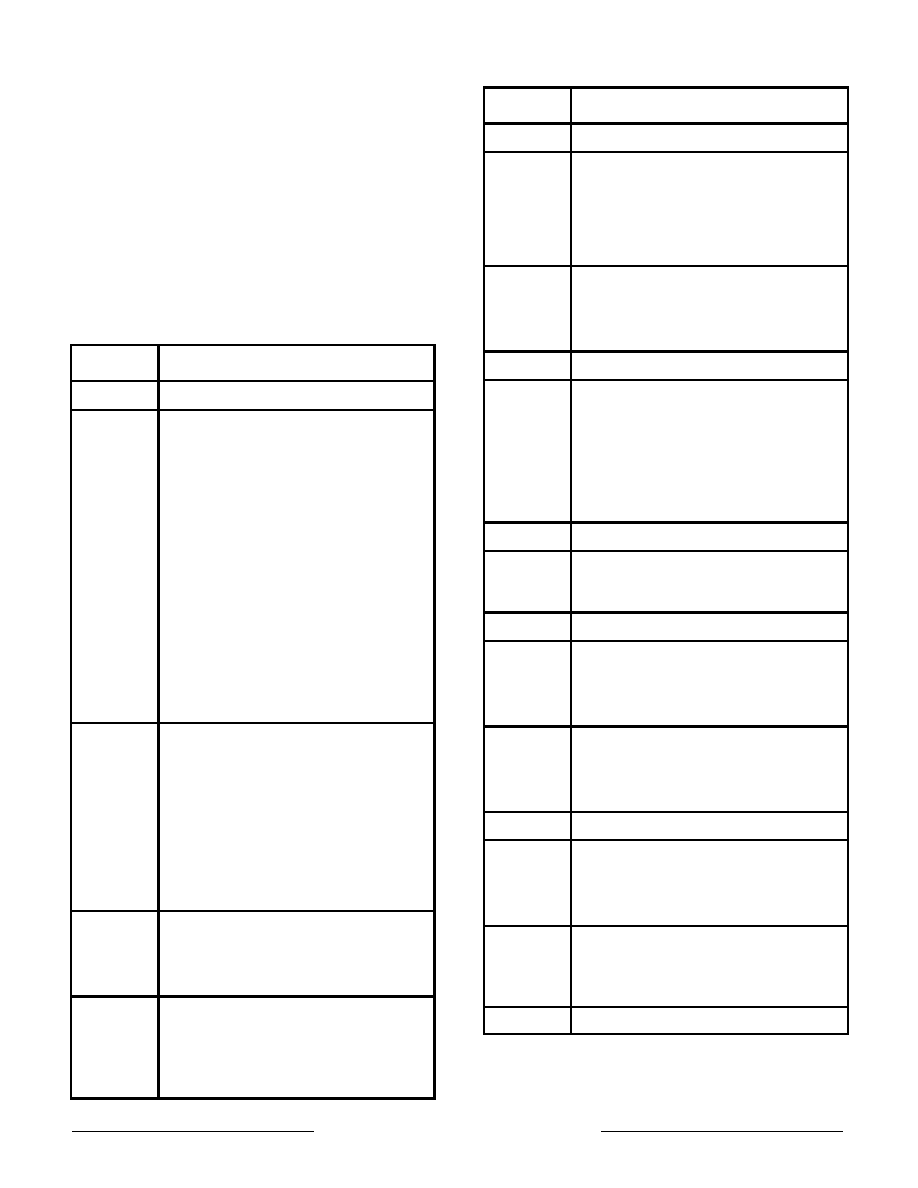
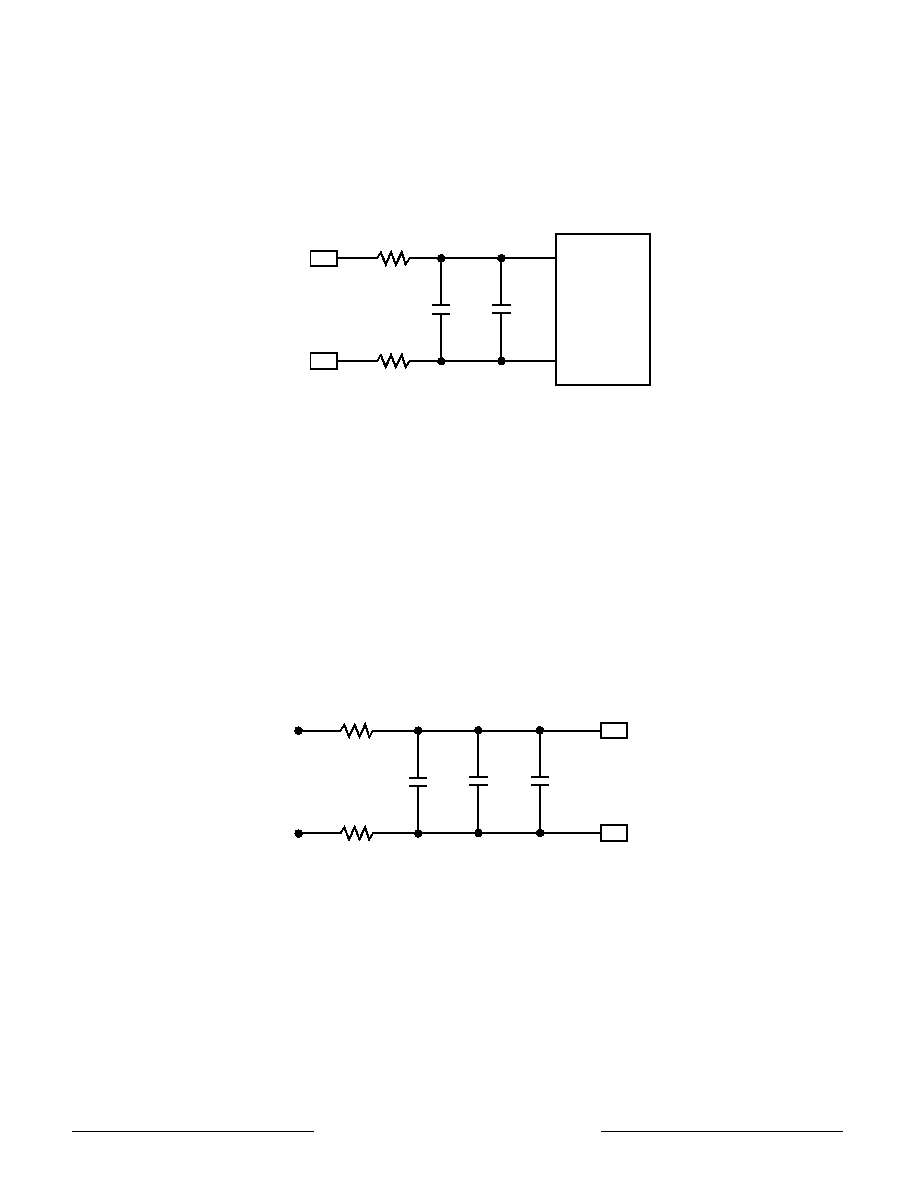
PLL Analog Power Filtering
The ACT 7000SC includes extra PLL Analog Power Fiiltering circuitry designed to provide low noise,
temperature stable filtering for the VccP and VssP signals. The included circuitry consists of several passive
components located at the closest possible point to the RM7000 die and is configured as shown in Figure 9.
Additional board level PPL filtering is also required. The recommended configuration is shown in
Figure 10.
64
65
.01
µF
1000
pF
5
5
RM7000
Die
VccP
VssP
10
µF
.1
µF
5
5
64
65
VccP
VssP
1000
pF
VccInt
VssInt
Figure 10 ≠ Recommended Board Level PLL Filter circuit
Figure 9 ≠ ACT 7000SC Including PLL Filter Circuit
for the ACT 7000SC

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
18
Absolute Maximum Rating
1
Symbol
Parameter
Limits
Units
V
TERM
Terminal Voltage with respect to V
SS
-0.5
2
to +3.9
V
T
C
Case Operating Temperature
-55 to +125
∞C
T
STG
Storage Temperature
-65 to +150
∞C
I
IN
DC Input Current
20
3
mA
I
OUT
DC Output Current
4
50
mA
Note 1: Stresses greater than those listed under ABSOLUTE MAXIMUM RATINGS may cause permanent damage to the device. This is a stress rating
only and functional operation of the device at these or any other conditions above those indicated in the operational sections of this specification is
not implied. Exposure to absolute maximum rating conditions for extended periods may affect reliability.
Note 2: V
IN
minimum = -2.0V for pulse width less than 15ns. V
IN
should not exceed 3.9 Volts.
Note 3: When V
IN
< 0V or V
IN
> V
CC
IO
Note 4: Not more than one output should be shorted at a time. Duration of the short should not exceed 30 seconds.
Recommended Operating Conditions
CPU Speed
Temperature
Vss
VssInt
VccIO
VccP
150 - 225 MHz
-55∞C to +125∞C (T
C
)
0V
2.5V ±5%
3.3V ±5%
2.5V ±5%
Note:
V
CC
I/O should not exceed VccInt by greater than 1.2V during the power-up sequence.
Note:
Applying a logic high state to any I/O pin before VccInt becomes stable is not recommended.
Note:
As specified in IEEE 1149.1 (JTAG), the JTMS pin must be held low during reset to avoid entering JTAG test mode. Refer to the RM7000 Family
Users Manual, Appendix E.
DC Electrical Characteristics
Parameter
Minimum
Maximum
Conditions
V
OL
0.1V
|I
OUT
|= 20 µA
V
OH
V
CC
IO - 0.1V
V
OL
0.4V
|I
OUT
|= 4 mA
V
OH
2.4V
V
IL
-0.5V
0.2 x V
CC
IO
V
IH
0.7 x V
CC
IO
V
CC
IO + 0.5V
I
IN
±20µA
±20µA
V
IN
= 0
V
IN
= V
CC
IO
C
IN
10pF
C
OUT
10pF
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
19
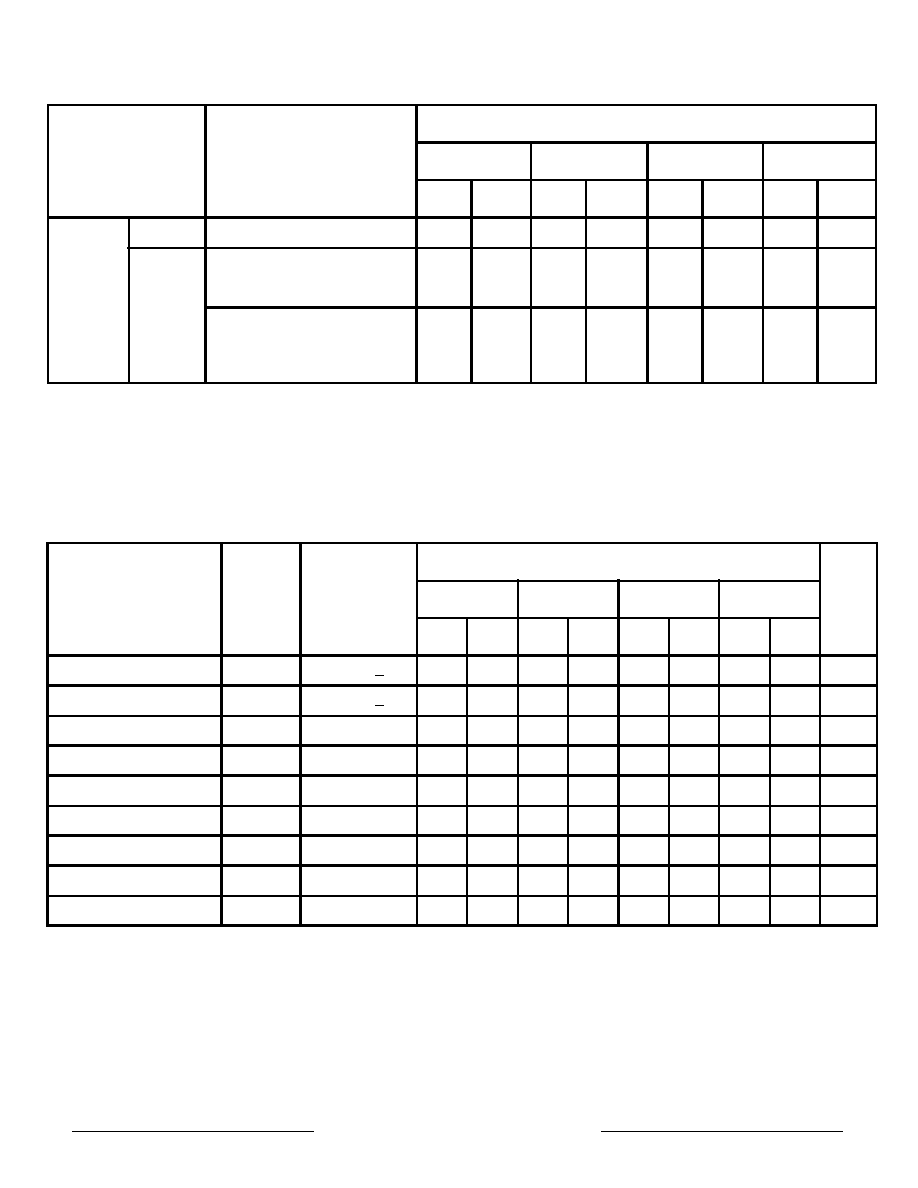
Power Consumption
Parameter
Condition
CPU Clock Speed
150 MHz
200 MHz
210 MHz
225 MHz
Typ
1
Max
2
Typ
1
Max
2
Typ
1
Max
2
Typ
1
Max
2
VccInt
Power
(mWatts)
Standby
No SysAD bus activity
500
1000
1500
2000
Active
R4000 write protocol with no
FPU operation
(integer Instruction only)
2200
4400
2700
5400
2800
5600
3800
7600
Write re-issue or pipelined
writes with superscalar
(integer and floating point
instructions)
2550
5100
3150
6300
3300
6600
4250
8500
Note 1: Typical integer instruction mix and cache miss rates with worst case supply voltage.
Note 2: Worst case instruction mix with worst case supply voltage.
Note: I/O supply power is application dependant, but typically <10% of VccInt.
AC Electrical Characteristics ≠ Clock Parameters
Parameter
Symbol
Test
Condition
CPU Clock Speed
Units
150 MHz
200 MHz
210 MHz
225 MHz
Min
Max
Min
Max
Min
Max
Min
Max
SysClock High
t
SCHIGH
Transition < 5ns
3
3
3
3
ns
SysClock Low
t
SCLOW
Transition < 5ns
3
3
3
3
ns
SysClock Frequency
25
75
25
75
25
70
25
75
MHz
SysClock Period
t
SCP
40
40
40
40
ns
Clock Jitter for SysClock
t
JITTERIN
±200
±200
±150
±150
ps
SysClock Rise Time
t
SCRISE
2
2
2
2
ns
SysClock Fall Time
t
SCFALL
2
2
2
2
ns
ModeClock Period
t
MODECKP
256
256
256
256
t
SCP
JTAG Clock Period
t
JTAGCKP
4
4
4
4
t
SCP
Note:
Operation of the ACT 7000 is only guaranteed with the Phase Lock Loop enabled

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
20
System Interface Parameters
Parameter
8
Sym
Test Conditions
150MHz
200MHz
210MHz
225MHz
Units
Min Max
Min Max
Min Max
Min Max
Data Output
2,3
t
DO
mode
14...13
= 10 (fastest)
1.0
6.0
1.0
6.0
1.0
5.5
1.0
5.5
ns
mode
14...13
= 11
1.0
6.5
1.0
6.5
1.0
6.0
1.0
6.0
ns
mode
14...13
= 00
1.0
7.0
1.0
7.0
1.0
6.5
1.0
6.5
ns
mode
14...13
= 01 (slowest)
1.0
7.5
1.0
7.5
1.0
7.0
1.0
7.0
ns
Data Setup
4
t
DS
t
rise
= see above table
2.5
2.5
2.5
2.5
ns
Data Hold
4
t
DH
t
fall
= see above table
1.0
1.0
1.0
1.0
ns
Notes:
1. Timings are measured from 1.5V of the clock to 1.5V of the signal.
2. Capacitive load for all output timings is 50pF.
3. Data Output timing applies to all signal pins whether tristate I/O or output only.
4. Setup and Hold parameters apply to all signal pins whether tristate I/O or input only.
Boot-Time Interface Parameters
Parameter
Symbol
Test Conditions
Min
Max
Units
Mode Data Setup
t
DS
4
SysClock cycles
Mode Data Hold
t
DH
0
SysClock cycles
SysClock Timing
Input Timing
Output Timing
±t
JitterIn
t
SCRise
t
SCFall
SysClock
t
SCP
Data
SysClock
Data
t
DH
t
DS
Data
SysClock
Data
Data
t
DO
t
DO
MIN
Clock Timing
System Interface Timing
(SysAD, SysCmd, ValidIn*, ValidOut*, etc.)

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
21
Pin Descriptions
The following is a list of control, data, clock, interrupt, and miscellaneous pins of the ACT 7000SC.
Pin Name
Type
Description
System interface:
ExtRqst*
Input
External request
Signals that the system interface is submitting an external request.
Release*
Output
Release interface
Signals that the processor is releasing the system interface to slave state
RdRdy*
Input Read
Ready
Signals that an external agent can now accept a processor read.
WrRdy*
Input
Write Ready
Signals that an external agent can now accept a processor write request.
ValidIn*
Input
Valid Input
Signals that an external agent is now driving a valid address or data on the
SysAD bus and a valid command or data identifier on the SysCmd bus.
ValidOut*
Output
Valid output
Signals that the processor is now driving a valid address or data on the SysAD
bus and a valid command or data identifier on the SysCmd bus.
SysAD(63:0)
Input/
Output
System address/data bus
A 64-bit address and data bus for communication between the processor and an
external agent.
SysADC(7:0)
Input/
Output
System address/data check bus
An 8-bit bus containing parity check bits for the SysAD bus during data cycles.
SysCmd(8:0)
Input/
Output
System command/data identifier bus
A 9-bit bus for command and data identifier transmission between the processor
and an external agent.
SysCmdP
Input/
Output
System Command/Data Identifier Bus Parity
For the RM7000, unused on input and zero on output.
Clock/Control interface:
SysClock
Input
System clock
Master clock input used as the system interface reference clock. All output
timings are relative to this input clock. Pipeline operation frequency is derived by
multiplying this clock up by the factor selected during boot initialization
VccP
Input
Vcc for PLL
Quiet VccInt for the internal phase locked loop. Must be connected to VccInt.
See Figure 10 for additional PPL filtering information.
VssP
Input
Vss for PLL
Quiet Vss for the internal phase locked loop. Must be connected to Vss.
See Figure 10 for additional PPL filtering information.
Interrupt Interface
Int*(5:0)
Input
Interrupt
Six general processor interrupts, bit-wise ORed with bits 5:0 of the interrupt
register.
NMI*
Input
Non-maskable interrupt
Non-maskable interrupt, ORed with bit 15 of the interrupt register (bit 7 in R5000
compatibility mode).

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
22
For additional Detail Information regarding the operation of the Quantum Effect Devices (QED) RISCMark
RM7000
, 64-Bit Superscalar Microprocessor see the latest QED datasheet and users guide
(www.qedinc.com).
JTAG interface:
JTDI
Input
JTAG data in
JTAG serial data in.
JTCK
Input
JTAG clock input
JTAG serial clock input.
JTDO
Output
JTAG data out
JTAG serial data out.
JTMS
Input
JTAG command
JTAG command signal, signals that the incoming serial data is command data.
Initialization Interface:
BigEndian
Input
Big Endian / Little Endian Control
Allows the system to change the processor addressing mode without rewriting
the mode ROM.
VccOK
Input
Vcc is OK
When asserted, this signal indicates to the ACT 7000 that the 2.5V power supply
has been above 2.25V for more than 100 milliseconds and will remain stable.
The assertion of VccOK initiates the reading of the boot-time mode control serial
stream.
ColdReset*
Input
Cold Reset
This signal must be asserted for a power on reset or a cold reset. ColdReset
must be de-asserted synchronously with SysClock.
Reset*
Input
Reset
This signal must be asserted for any reset sequence. It may be asserted
synchronously or asynchronously for a cold reset, or synchronously to initiate a
warm reset. Reset must be de-asserted synchronously with SysClock.
ModeClock
Output
Boot Mode Clock
Serial boot-mode data clock output at the system clock frequency divided by two
hundred and fifty six.
ModeIn
Input
Boot Mode Data In
Serial boot-mode data input.
Pin Descriptions (Cont.)
The following is a list of control, data, clock, interrupt, and miscellaneous pins of the ACT 7000SC.
Pin Name
Type
Description

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
23
1.131 (28.727) SQ
1.109 (28.169) SQ
1.009 (25.63)
.9998 (25.37)
51 Spaces at .0197
(51 Spaces at .50)
.023
6 (
.
51)
.015
8 (
.
49)
52
1
208
156
157
105
104
53
Pin 1 Chamfer
Detail "A"
0∞±5∞
1.331 (33.807)
1.269 (32.233)
.005 (
.
1
27)
.008 (
.
2
02)
.055 (1.397)
REF
.055 (1.397)
.045 (1.143)
.115 (2.921)
MAX
.960 (24.384) SQ
REF
.130 (3.302)
MAX
.010R REF
.010R REF
.010 (.253)
.007 (.178)
.015 (.381)
.009 (.229)
.100 (2.540)
.080 (2.032)
Package Information ≠ "F17" ≠ CQFP 208 Leads
Detail "A"
Note: Pin rotation is opposite of QEDs PQUAD due to cavity-up construction.
.035 (.889)
.025 (.635)
Units: Inches (Millimeters)
Lid
1.131 (28.727) SQ
1.109 (28.169) SQ
1.009 (25.63)
.9998 (25.37)
51 Spaces at .0197
(51 Spaces at .50)
.0236
(
.
5
1
)
.0158
(
.
4
9
)
157
208
1
53
52
104
105
156
Pin 1 Chamfer
Detail "A"
0∞±5∞
1.331 (33.807)
1.291 (32.791)
.005 (
.
1
27)
.008 (
.
2
02)
.139 (3.531)
MAX
.024 (.610)
.010 (.253)
.115 (2.921)
MAX
.012R REF
.012R REF
.010 (.253)
.007 (.178)
.100 (2.540)
.080 (2.032)
Package Information ≠ "F24" ≠ Inverted CQFP 208 Leads
Detail "A"
Note: Pin rotation is Identical to QEDs PQUAD due to cavity-down construction.
.060 (1.524)
.040 (1.016)
Units: Inches (Millimeters)
.055 (1.397)
REF
.055 (1.397)
.045 (1.143)
.960 (24.384) REF
Lid

Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
24
ACT 7000SC Microprocessor CQFP Pinouts ≠ "F17" & "F24"
Pin #
Function
Pin #
Function
Pin #
Function
Pin #
Function
1
VccIO
53
NC
105
VccIO
157
NC
2
NC
54
NC
106
NMI*
158
NC
3
NC
55
NC
107
ExtRqst*
159
NC
4
VccIO
56
VccIO
108
Reset*
160
NC
5
Vss
57
Vss
109
ColdReset*
161
VccIO
6
SysAD4
58
ModeIn
110
VccOK
162
Vss
7
SysAD36
59
RdRdy*
111
BigEndian
163
SysAD28
8
SysAD5
60
WrRdy*
112
VccIO
164
SysAD60
9
SysAD37
61
ValidIn*
113
Vss
165
SysAD29
10
VccInt
62
ValidOut*
114
SysAD16
166
SysAD61
11
Vss
63
Release*
115
SysAD48
167
VccInt
12
SysAD6
64
VccP
116
VccInt
168
Vss
13
SysAD38
65
VssP
117
Vss
169
SysAD30
14
VccIO
66
SysClock
118
SysAD17
170
SysAD62
15
Vss
67
VccInt
119
SysAD49
171
VccIO
16
SysAD7
68
Vss
120
SysAD18
172
Vss
17
SysAD39
69
VccIO
121
SysAD50
173
SysAD31
18
SysAD8
70
Vss
122
VccIO
174
SysAD63
19
SysAD40
71
VccInt
123
Vss
175
SysADC2
20
VccInt
72
Vss
124
SysAD19
176
SysADC6
21
Vss
73
SysCmd0
125
SysAD51
177
VccInt
22
SysAD9
74
SysCmd1
126
VccInt
178
Vss
23
SysAD41
75
SysCmd2
127
Vss
179
SysADC3
24
VccIO
76
SysCmd3
128
SysAD20
180
SysADC7
25
Vss
77
VccIO
129
SysAD52
181
VccIO
26
SysAD10
78
Vss
130
SysAD21
182
Vss
27
SysAD42
79
SysCmd4
131
SysAD53
183
SysADC0
28
SysAD11
80
SysCmd5
132
VccIO
184
SysADC4
29
SysAD43
81
VccIO
133
Vss
185
VccInt
30
VccInt
82
Vss
134
SysAD22
186
Vss
31
Vss
83
SysCmd6
135
SysAD54
187
SysADC1
32
SysAD12
84
SysCmd7
136
VccInt
188
SysADC5
33
SysAD44
85
SysCmd8
137
Vss
189
SysAD0
34
VccIO
86
SysCmdP
138
SysAD23
190
SysAD32
35
Vss
87
VccInt
139
SysAD55
191
VccIO
36
SysAD13
88
Vss
140
SysAD24
192
Vss
37
SysAD45
89
VccInt
141
SysAD56
193
SysAD1
38
SysAD14
90
Vss
142
VccIO
194
SysAD33
39
SysAD46
91
VccIO
143
Vss
195
VccInt
40
VccInt
92
Vss
144
SysAD25
196
Vss
41
Vss
93
Int0*
145
SysAD57
197
SysAD2
42
SysAD15
94
Int1*
146
VccInt
198
SysAD34
43
SysAD47
95
Int2*
147
Vss
199
SysAD3
44
VccIO
96
Int3*
148
SysAD26
200
SysAD35
45
Vss
97
Int4*
149
SysAD58
201
VccIO
46
ModeClock
98
Int5*
150
SysAD27
202
Vss
47
JTDO
99
VccIO
151
SysAD59
203
NC
48
JTDI
100
Vss
152
VccIO
204
NC
49
JTCK
101
NC
153
Vss
205
NC
50
JTMS
102
NC
154
NC
206
NC
51
VccIO
103
NC
155
NC
207
VccIO
52
Vss
104
NC
156
Vss
208
Vss
Aeroflex Circuit Technology
SCD7000SC REV B 7/30/01 Plainview NY (516) 694-6700
25
Sample Ordering Information
Part Number
Screening
Speed (MHz)
Package
ACT-7000SC-150F17I
Industrial Temperature
150
208 Lead CQFP
ACT-7000SC-200F17C
Commercial Temperature
200
208 Lead CQFP
ACT-7000SC-210F17T
Military Temperature
210
208 Lead CQFP
ACT-7000SC-225F17M
Military Screening
225
208 Lead CQFP
Aeroflex Circuit Technology
35 South Service Road
Plainview New York 11803
Telephone: (516) 694-6700
FAX: (516) 694-6715
Toll Free Inquiries: (800) 843-1553
www.aeroflex.com
E-Mail: sales-mcm@aeroflex.com
C I R C U I T T E C H N O L O G Y
Part Number Breakdown
ACT≠ 7000 SC ≠ 225 F17 M
Aeroflex Circuit
Technology
Base Processor Type
150 = 150MHz
200 = 200MHz
210 = 210MHz
225 = 225MHz
240 = 240MHz (Future Option)
250 = 250MHz (Future Option)
266 = 266MHz (Future Option)
Cache Style
Package Type & Size
C = Commercial Temp, 0∞C to +70∞C
I = Industrial Temp, -40∞C to +85∞C
T = Military Temp, -55∞C to +125∞C
M = Military Temp, -55∞C to +125∞C, Screened
*
Q = MIL-PRF-38534 Compliant/SMD if applicable
Screening
*
Screened to the individual test methods of MIL-STD-883
SC = Secondary Cache
Maximum Pipeline Freq.
Surface Mount Package
F17 = 1.120" SQ 208 Lead CQFP
F24 = 1.120" SQ Inverted 208 Lead CQFP
This document may, wholly or partially, be subject to change without notice. Aeroflex reserves the right to make changes to its products or specifications at any time
without notice.
Aeroflex will not be held responsible for any damage to the user or any property that may result from accidents, misuse, or any other causes arising during operation of
the user's unit.
Aeroflex does not assume any responsibility for use of any circuitry described other than the circuitry embodied in a Aeroflex product. The company makes no
representations that the circuitry described herein is free from patent infringement or other rights of third parties, which may result from its use. No license is granted by
implication or otherwise under any patent, patent rights, or other rights, of Aeroflex.
The QED logo and RISCMark are trademarks of Quantum Effect Devices, Inc.
MIPS is a registered trademark of MIPS Technologies, Inc. All other trademarks are the respective property of the trademark holders.