
1
DESCRIPTION
The CAT5221 is two Digitally Programmable
Potentiometers (DPPsTM) integrated with control logic
and 16 bytes of NVRAM memory. Each DPP consists of
a series of 63 resistive elements connected between two
externally accessible end points. The tap points between
each resistive element are connected to the wiper outputs
with CMOS switches. A separate 6-bit control register
(WCR) independently controls the wiper tap switches for
each DPP. Associated with each wiper control register
are four 6-bit non-volatile memory data registers (DR)
used for storing up to four wiper settings. Writing to the
CAT5221
Dual Digitally Programmable Potentiometers (DPPTM)
with 64 Taps and 2-wire Interface
FEATURES
s
Two linear-taper digitally programmable
potentiometers
s
64 resistor taps per potentiometer
s
End to end resistance 2.5k
, 10k
, 50k
or 100k
s
Potentiometer control and memory access via
2-wire interface (I
2
C like)
s
Low wiper resistance, typically 80
s
Nonvolatile memory storage for up to four wiper
settings for each potentiometer
s
Automatic recall of saved wiper settings at
power up
s
2.5 to 6.0 volt operation
s
Standby current less than 1
�
A
s
1,000,000 nonvolatile WRITE cycles
s
100 year nonvolatile memory data retention
s
20-lead SOIC and TSSOP packages
s
Industrial temperature ranges
PIN CONFIGURATION
FUNCTIONAL DIAGRAM
� 2004 by Catalyst Semiconductor, Inc.
Characteristics subject to change without notice
Document No. 2113, Rev. I
wiper control register or any of the non-volatile data
registers is via a 2-wire serial bus (I
2
C-like). On power-
up, the contents of the first data register (DR0) for each
of the four potentiometers is automatically loaded into its
respective wiper control register (WCR).
The CAT5221 can be used as a potentiometer or as a
two terminal, variable resistor. It is intended for circuit
level or system level adjustments in a wide variety of
applications.
HA
LOGEN FREE
TM
LEAD FREE
W1
W0
H0
H1
R
R
L0
L1
R R
WIPER
CONTROL
REGISTERS
NONVOLATILE
DATA
REGISTERS
2-WIRE BUS
INTERFACE
CONTROL
LOGIC
SCL
SDA
A0
A1
A2
A3
R
R
20
19
18
17
16
15
14
13
12
11
1
2
3
4
5
6
7
8
9
10
CAT
5221
RW0
RL0
RH0
A0
A2
RW1
RL1
RH1
SDA
GND
VCC
NC
NC
NC
A1
A3
SCL
NC
NC
NC
SOIC Package (J, W)
TSSOP Package (U, Y)

2
CAT5221
Document No. 2113, Rev. I
PIN DESCRIPTION
Pin
(SOIC)Name
Function
1
R
W0
Wiper Terminal for Potentiometer 0
2
R
L0
Low Reference Terminal for Potentiometer 0
3
R
H0
High Reference Terminal for Potentiometer 0
4
A0
Device Address, LSB
5
A2
Device Address
6
R
W1
Wiper Terminal for Potentiometer 1
7
R
L1
Low Reference Terminal for Potentiometer 1
8
R
H1
High Reference Terminal for Potentiometer 1
9
SDA
Serial Data Input/Output
10
GND
Ground
11
NC
No Connect
12
NC
No Connect
13
NC
No Connect
14
SCL
Bus Serial Clock
15
A3
Device Address
16
A1
Device Address
17
NC
No Connect
18
NC
No Connect
19
NC
No Connect
20
VCC
Supply Voltage
PIN DESCRIPTIONS
SCL:
Serial Clock
The CAT5221 serial clock input pin is used to clock
all data transfers into or out of the device.
SDA:
Serial Data
The CAT5221 bidirectional serial data pin is used
to transfer data into and out of the device. The
SDA pin is an open drain output and can be wire-
OR'd with the other open drain or open collector
outputs.
A0, A1, A2, A3: Device Address Inputs
These inputs set the device address when
addressing multiple devices. A total of sixteen
devices can be addressed on a single bus.
A match in the slave address must be made
with the address input in order to initiate
communication with the CAT5221.
R
H
, R
L
: Resistor End Points
The two sets of R
H
and R
L
pins are equivalent
to the terminal connections on a mechanical
potentiometer.
R
W
:
Wiper
The two R
W
pins are equivalent to the wiper
terminal of a mechanical potentiometer.
DEVICE OPERATION
The CAT5221 is two resistor arrays integrated with 2-
wire serial interface logic, two 6-bit wiper control registers
and eight 6-bit, non-volatile memory data registers.
Each resistor array contains 63 separate resistive
elements connected in series. The physical ends of
each array are equivalent to the fixed terminals of a
mechanical potentiometer (R
H
and R
L
). R
H
and R
L
are
symmetrical and may be interchanged. The tap positions
between and at the ends of the series resistors are
connected to the output wiper terminals (R
W
) by a
CMOS transistor switch. Only one tap point for each
potentiometer is connected to its wiper terminal at a time
and is determined by the value of the wiper control
register. Data can be read or written to the wiper control
registers or the non-volatile memory data registers via
the 2-wire bus. Additional instructions allow data to be
transferred between the wiper control registers and
each respective potentiometer's non-volatile data
registers. Also, the device can be instructed to operate
in an "increment/decrement" mode.

3
CAT5221
Document No. 2113, Rev. I
POTENTIOMETER CHARACTERISTICS
Over recommended operating conditions unless otherwise stated.
Symbol
Parameter
Test Conditions
Min
Typ
Max
Units
R
POT
Potentiometer Resistance (-00
)
100
k
R
POT
Potentiometer Resistance (-50
)
50
k
R
POT
Potentiometer Resistance (-10
)
10
k
R
POT
Potentiometer Resistance (-2.5
)
2.5
k
Potentiometer Resistance
+20
%
Tolerance
R
POT
Matching
1
%
Power Rating
25
�
C, each pot
50
mW
I
W
Wiper Current
+6
mA
R
W
Wiper Resistance
I
W
= +3mA @ V
CC
=3V
300
R
W
Wiper Resistance
I
W
= +3mA @ V
CC
= 5V
80
150
V
TERM
Voltage on any R
H
or R
L
Pin
V
SS
= 0V
GND
V
CC
V
V
N
Noise
(1)
TBD
nV/ Hz
Resolution
1.6
%
Absolute Linearity
(2)
R
w(n)(actual)
-R
(n)(expected)
(5)
+1
LSB
(4)
Relative Linearity
(3)
R
w(n+1)
-[R
w(n)+LSB
]
(5)
+0.2
LSB
(4)
Temperature Coefficient of
+300
ppm/
�
C
TC
RPOT
R
POT
(1)
TC
RATIO
Ratiometric Temp. Coefficient
(1)
20
ppm/
�
C
C
H
/C
L
/C
W
Potentiometer Capacitances
(1)
10/10/25
pF
fc
Frequency Response
R
POT
= 50k
(1)
0.4
MHz
ABSOLUTE MAXIMUM RATINGS*
Temperature Under Bias .................. -55
�
C to +125
�
C
Storage Temperature ........................ -65
�
C to +150
�
C
Voltage on any Pin with
Respect toV
SS
(1)(2)
................. -2.0V to +V
CC
+2.0V
V
CC
with Respect to Ground ................ -2.0V to +7.0V
Package Power Dissipation
Capability (T
A
= 25
�
C) ................................... 1.0W
Lead Soldering Temperature (10 secs) ............ 300
�
C
Wiper Current .................................................. +12mA
Note:
(1) The minimum DC input voltage is �0.5V. During transitions, inputs may undershoot to �2.0V for periods of less than 20 ns.
Maximum DC voltage on output pins is V
CC
+0.5V, which may overshoot to V
CC
+2.0V for periods of less than 20 ns.
(2) Latch-up protection is provided for stresses up to 100 mA on address and data pins from �1V to V
CC
+1V.
*COMMENT
Stresses above those listed under "Absolute Maximum Ratings"
may cause permanent damage to the device. These are stress
ratings only, and functional operation of the device at these or any
other conditions outside of those listed in the operational sections
of this specification is not implied. Exposure to any absolute
maximum rating for extended periods may affect device perfor-
mance and reliability.
Note:
(1) This parameter is tested initially and after a design or process change that affects the parameter.
(2) Absolute linearity is utilitzed to determine actual wiper voltage versus expected voltage as determined by wiper position when used
as a potentiometer.
(3) Relative linearity is utilized to determine the actual change in voltage between two successive tap positions when used as a
potentiometer. It is a measure of the error in step size.
(4) LSB = R
TOT
/ 63 or (R
H
- R
L
) / 63, single pot
(5) n = 0, 1, 2, ..., 63
Recommended Operating Conditions:
V
CC
= +2.5V to +6.0V
Temperature
Min
Max
Industrial
-40
�
C
85
�
C

4
CAT5221
Document No. 2113, Rev. I
Symbol
Parameter
Min
Typ
Max
Units
f
SCL
Clock Frequency
400
kHz
T
I
(1)
Noise Suppression Time Constant at SCL, SDA Inputs
50
ns
t
AA
SLC Low to SDA Data Out and ACK Out
0.9
�
s
t
BUF
(1)
Time the Bus Must Be Free Before a New
1.2
�
s
Transmission Can Start
t
HD:STA
Start Condition Hold Time
0.6
�
s
t
LOW
Clock Low Period
1.2
�
s
t
HIGH
Clock High Period
0.6
�
s
t
SU:STA
Start Condition SetupTime (For a Repeated Start Condition)
0.6
�
s
t
HD:DAT
Data in Hold Time
0
ns
t
SU:DAT
Data in Setup Time
100
ns
t
R
(1)
SDA and SCL Rise Time
0.3
�
s
t
F
(1)
SDA and SCL Fall Time
300
ns
t
SU:STO
Stop Condition Setup Time
0.6
�
s
t
DH
Data Out Hold Time
50
ns
Note:
(1) This parameter is tested initially and after a design or process change that affects the parameter.
CAPACITANCE
T
A
= 25
�
C, f = 1.0 MHz, V
CC
= 5V
Symbol
Test
Conditions
Min
Typ
Max
Units
C
I/O
(1)
Input/Output Capacitance (SDA)
V
I/O
= 0V
8
pF
C
IN
(1)
Input Capacitance (A0, A1, A2, A3, SCL)
V
IN
= 0V
6
pF
POWER UP TIMING
(1)
Over recommended operating conditions unless otherwise stated.
Symbol
Parameter
Min
Typ
Max
Units
t
PUR
Power-up to Read Operation
1
ms
t
PUW
Power-up to Write Operation
1
ms
D.C. OPERATING CHARACTERISTICS
Over recommended operating conditions unless otherwise stated.
Symbol
Parameter
Test Conditions
Min
Typ
Max
Units
I
CC
Power Supply Current
f
SCL
= 400kHz
1
mA
I
SB
Standby Current (V
CC
= 5.0V)
V
IN
= GND or V
CC;
SDA Open
1
�
A
I
LI
Input Leakage Current
V
IN
= GND to V
CC
10
�
A
I
LO
Output Leakage Current
V
OUT
= GND to V
CC
10
�
A
V
IL
Input Low Voltage
-1
V
CC
x 0.3
V
V
IH
Input High Voltage
V
CC
x 0.7
V
CC
+ 1.0
V
V
OL1
Output Low Voltage (V
CC
= 3.0V)
I
OL
= 3 mA
0.4
V
A.C. CHARACTERISTICS
Over recommended operating conditions unless otherwise stated.
5
CAT5221
Document No. 2113, Rev. I
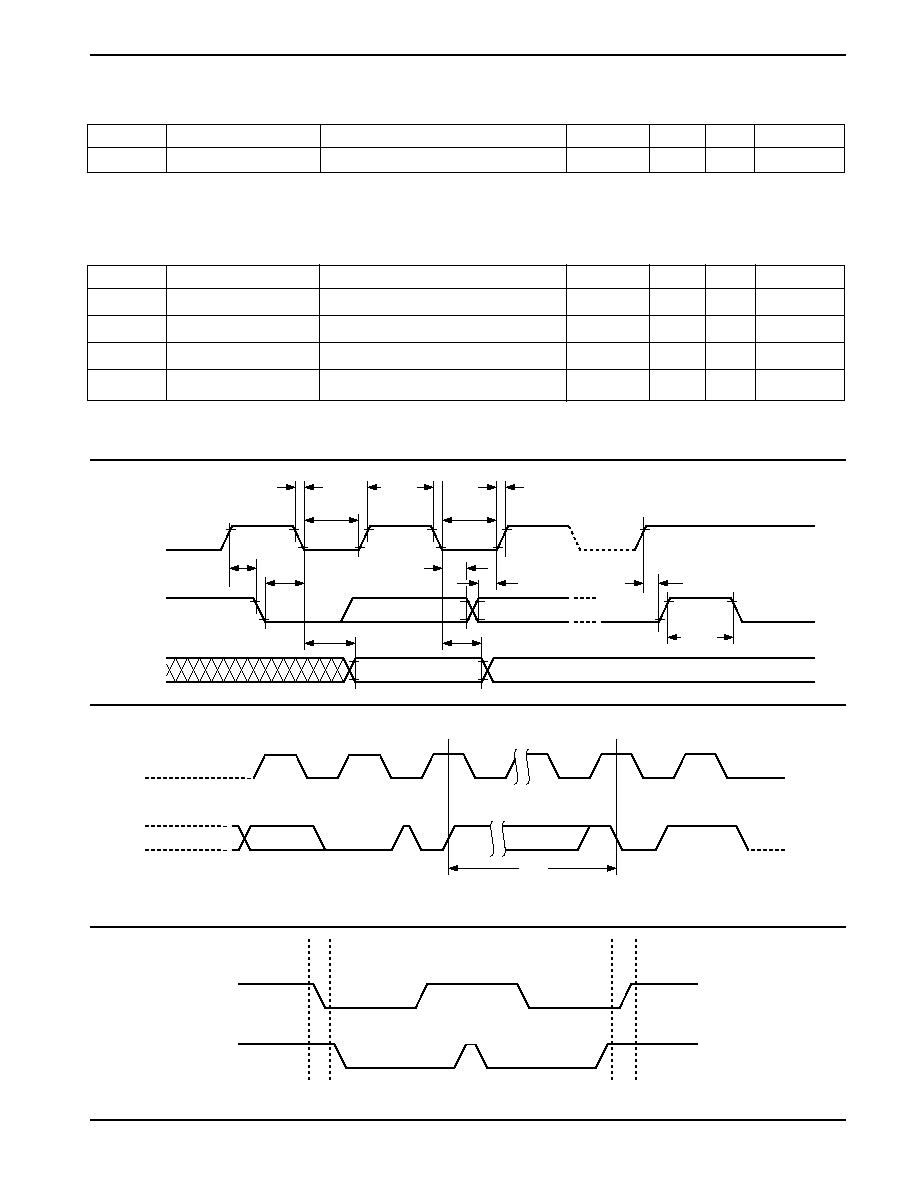
tHIGH
SCL
SDA IN
SDA OUT
tLOW
tF
tLOW
tR
tBUF
tSU:STO
tSU:DAT
tHD:DAT
tHD:STA
tSU:STA
tAA
tDH
Figure 1. Bus Timing
tWR
STOP
CONDITION
START
CONDITION
ADDRESS
ACK
8TH BIT
BYTE n
SCL
SDA
Figure 2. Write Cycle Timing
START BIT
SDA
STOP BIT
SCL
Figure 3. Start/Stop Timing
Note:
(1) This parameter is tested initially and after a design or process change that affects the parameter.
(2) t
PUR
and t
PUW
are the delays required from the time V
CC
is stable until the specified operation can be initiated.
WRITE CYCLE LIMITS
Over recommended operating conditions unless otherwise stated.
Symbol
Parameter
Min
Typ
Max
Units
t
WR
Write Cycle Time
5
ms
The write cycle is the time from a valid stop condition of a write sequence to the end of the internal program/erase cycle. During the write cycle,
the bus interface circuits are disabled, SDA is allowed to remain high, and the device does not respond to its slave address.
RELIABILITY CHARACTERISTICS
Over recommended operating conditions unless otherwise stated.
Symbol
Parameter
Reference Test Method
Min
Typ
Max
Units
N
END
(1)
Endurance
MIL-STD-883, Test Method 1033
1,000,000
Cycles/Byte
T
DR
(1)
Data Retention
MIL-STD-883, Test Method 1008
100
Years
V
ZAP
(1)
ESD Susceptibility
MIL-STD-883, Test Method 3015
2000
Volts
I
LTH
(1)(2)
Latch-Up
JEDEC Standard 17
100
mA
6
CAT5221
Document No. 2113, Rev. I
SERIAL BUS PROTOCOL
The following defines the features of the 2-wire bus
protocol:
(1) Data transfer may be initiated only when the bus
is not busy.
(2) During a data transfer, the data line must remain
stable whenever the clock line is high. Any
changes in the data line while the clock is high will
be interpreted as a START or STOP condition.
The device controlling the transfer is a master,
typically a processor or controller, and the device
being controlled is the slave. The master will always
initiate data transfers and provide the clock for both
transmit and receive operations. Therefore, the
CAT5221 will be considered a slave device in all
applications.
START Condition
The START Condition precedes all commands to the
device, and is defined as a HIGH to LOW transition of
SDA when SCL is HIGH. The CAT5221 monitors the
SDA and SCL lines and will not respond until this
condition is met.
STOP Condition
A LOW to HIGH transition of SDA when SCL is HIGH
determines the STOP condition. All operations must end
with a STOP condition.
DEVICE ADDRESSING
The bus Master begins a transmission by sending a
START condition. The Master then sends the address of
the particular slave device it is requesting. The four most
significant bits of the 8-bit slave address are fixed as
0101 for the CAT5221 (see Figure 5). The next four
significant bits (A3, A2, A1, A0) are the device address
bits and define which device the Master is accessing. Up
to sixteen devices may be individually addressed by the
system. Typically, +5V and ground are hard-wired to
these pins to establish the device's address.
After the Master sends a START condition and the slave
address byte, the CAT5221 monitors the bus and
responds with an acknowledge (on the SDA line) when
its address matches the transmitted slave address.
Acknowledge
After a successful data transfer, each receiving device is
required to generate an acknowledge. The
Acknowledging device pulls down the SDA line during
the ninth clock cycle, signaling that it received the 8 bits
of data.
The CAT5221 responds with an acknowledge after
receiving a START condition and its slave address. If the
device has been selected along with a write operation,
it responds with an acknowledge after receiving each
8-bit byte.
When the CAT5221 is in a READ mode it transmits 8 bits
of data, releases the SDA line, and monitors the line for
an acknowledge. Once it receives this acknowledge, the
CAT5221 will continue to transmit data. If no
acknowledge is sent by the Master, the device terminates
data transmission and waits for a STOP condition.
ACKNOWLEDGE
1
START
SCL FROM
MASTER
8
9
DATA OUTPUT
FROM TRANSMITTER
DATA OUTPUT
FROM RECEIVER
Figure 4. Acknowledge Timing

7
CAT5221
Document No. 2113, Rev. I
WRITE OPERATIONS
In the Write mode, the Master device sends the START
condition and the slave address information to the Slave
device. After the Slave generates an acknowledge, the
Master sends the instruction byte that defines the
requested operation of CAT5221. The instruction byte
consist of a four-bit opcode followed by two register
selection bits and two pot selection bits. After receiving
another acknowledge from the Slave, the Master device
transmits the data to be written into the selected register.
The CAT5221 acknowledges once more and the Master
generates the STOP condition, at which time if a non-
volatile data register is being selected, the device begins
an internal programming cycle to non-volatile memory.
While this internal cycle is in progress, the device will not
respond to any request from the Master device.
Acknowledge Polling
The disabling of the inputs can be used to take advantage
of the typical write cycle time. Once the stop condition is
issued to indicate the end of the host's write operation,
the CAT5221 initiates the internal write cycle. ACK
polling can be initiated immediately. This involves issuing
the start condition followed by the slave address. If the
CAT5221 is still busy with the write operation, no ACK
will be returned. If the CAT5221 has completed the write
operation, an ACK will be returned and the host can then
proceed with the next instruction operation.
Figure 6. Write Timing
Figure 5. Slave Address Bits
0
1
0
1
A3
A2
A1
A0
CAT5221
*
A0, A1, A2 and A3 correspond to pin A0, A1, A2 and A3 of the device.
**
A0, A1, A2 and A3 must compare to its corresponding hard wired input pins.
S
A
C
K
A
C
K
DR WCR DATA
S
T
O
P
P
BUS ACTIVITY:
MASTER
SDA LINE
S
T
A
R
T
A
C
K
SLAVE/DPP
ADDRESS
INSTRUCTION
BYTE
Fixed
Variable
op code
Data Register
Address
Pot/WCR
Address

8
CAT5221
Document No. 2113, Rev. I
INSTRUCTION AND REGISTER
DESCRIPTION
Instructions
SLAVE ADDRESS BYTE
The first byte sent to the CAT5221 from the master/
processor is called the Slave/DPP Address Byte. The
most significant four bits of the slave address are a
device type identifier. These bits for the CAT5221 are
fixed at 0101[B] (refer to Table 1).
The next four bits, A3 - A0, are the internal slave address
and must match the physical device address which is
defined by the state of the A3 - A0 input pins for the
CAT5221 to successfully continue the command
sequence. Only the device which slave address matches
the incoming device address sent by the master executes
the instruction. The A3 - A0 inputs can be actively driven
by CMOS input signals or tied to V
CC
or V
SS
.
INSTRUCTION BYTE
The next byte sent to the CAT5221 contains the instruction
and register pointer information. The four most significant
bits used provide the instruction opcode I [3:0]. The P0
bit points to one of the Wiper Control Registers. The
least two significant bits, R1 and R0, point to one of the
four data registers of each associated potentiometer.
The format is shown in Table 2.
Table 1. Identification Byte Format
ID3
ID2
ID1
ID0
A3
A2
A1
A0
0
1
0
1
(MSB)
(LSB)
Device Type
Identifier
Slave Address
Table 2. Instruction Byte Format
Data Register Selected
R1
R0
DR0
0
0
DR1
0
1
DR2
1
0
DR3
1
1
Data Register Selection
I3
I2
I1
I0
R1
R0
0
P0
(MSB)
(LSB)
Instruction
Data Register
WCR/Pot Selection
Opcode
Selection
9
CAT5221
Document No. 2113, Rev. I
Table 3. Instruction Set
WIPER CONTROL AND DATA REGISTERS
Wiper Control Register (WCR)
The CAT5221 contains two 6-bit Wiper Control Registers,
one for each potentiometer. The Wiper Control Register
output is decoded to select one of 64 switches along its
resistor array. The contents of the WCR can be altered
in four ways: it may be written by the host via Write Wiper
Control Register instruction; it may be written by
transferring the contents of one of four associated Data
Registers via the XFR Data Register instruction, it can be
modified one step at a time by the Increment/decrement
instruction (see Instruction section for more details).
Finally, it is loaded with the content of its data register
zero (DR0) upon power-up.
The Wiper Control Register is a volatile register that
loses its contents when the CAT5221 is powered-down.
Although the register is automatically loaded with the
value in DR0 upon power-up, this may be different from
the value present at power-down.
Data Registers (DR)
Each potentiometer has four 6-bit non-volatile Data
Registers. These can be read or written directly by the
host. Data can also be transferred between any of the
four Data Registers and the associated Wiper Control
Register. Any data changes in one of the Data Registers
is a non-volatile operation and will take a maximum of
5ms.
If the application does not require storage of multiple
settings for the potentiometer, the Data Registers can be
used as standard memory locations for system
parameters or user preference data.
INSTRUCTIONS
Four of the nine instructions are three bytes in length.
These instructions are:
--
Read Wiper Control Register
- read the current
wiper position of the selected potentiometer in the WCR
-- Write Wiper Control Register - change current
wiper position in the WCR of the selected potentiometer
-- Read Data Register - read the contents of the
selected Data Register
-- Write Data Register - write a new value to the
selected Data Register
The basic sequence of the three byte instructions is
illustrated in Figure 8. These three-byte instructions
Note:
1/0 = data is one or zero
Instruction
Instruction Set
Operation
I3
I2
I1
I0
R1
R0
Read Wiper Control
Register
1
0
0
1
0
0
Read the contents of the Wiper Control
Register pointed to by P0
Write Wiper Control Register
1
0
1
0
0
0
Write new value to the Wiper Control
Register pointed to by P0
Read Data Register
1
0
1
1
1/0
1/0
Read the contents of the Data Register
pointed to by P0 and R1-R0
Write Data Register
1
1
0
0
1/0
1/0
Write new value to the Data Register
pointed to by P0 and R1-R0
XFR Data Register to Wiper
Control Register
1
1
0
1
1/0
1/0
Transfer the contents of the Data Register
pointed to by P0 and R1-R0 to its
associated Wiper Control Register
XFR Wiper Control Register
to Data Register
1
1
1
0
1/0
1/0
Transfer the contents of the Wiper Control
Register pointed to by P0 to the Data
Register pointed to by R1-R0
Global XFR Data Registers
to Wiper Control Registers
0
0
0
1
1/0
1/0
Transfer the contents of the Data Registers
pointed to by R1-R0 of all four pots to their
respective Wiper Control Register
s
Global XFR Wiper Control
Registers to Data Register
1
0
0
0
1/0
1/0
Transfer the contents of both Wiper Control
Registers to their respective data Registers
pointed to by R1-R0 of all four pots
Increment/Decrement Wiper
Control Register
0
0
1
0
0
0
Enable Increment/decrement of the Control
Latch pointed to by P0
1/0
1/0
1/0
1/0
1/0
1/0
0
0
0
0
1/0
WCR0/
P0
0
0
0
0
0
0
0
0

10
CAT5221
Document No. 2113, Rev. I
exchange data between the WCR and one of the Data
Registers. The WCR controls the position of the wiper.
The response of the wiper to this action will be delayed
by t
WRL
. A transfer from the WCR (current wiper position),
to a Data Register is a write to non-volatile memory and
takes a maximum of t
WR
to complete. The transfer can
occur between one of the four potentiometers and one
of its associated registers; or the transfer can occur
between all potentiometers and one associated register.
Four instructions require a two-byte sequence to
complete, as illustrated in Figure 7. These instructions
transfer data between the host/processor and the
CAT5221; either between the host and one of the data
registers or directly between the host and the Wiper
Control Register. These instructions are:
-- XFR Data Register to Wiper Control Register
This transfers the contents of one specified Data
Register to the associated Wiper Control Register.
-- XFR Wiper Control Register to Data Register
This transfers the contents of the specified Wiper
Control Register to the specified associated
Data Register.
-- Global XFR Data Register to Wiper
Control Register
This transfers the contents of all specified Data
Registers to the associated Wiper Control
Registers.
-- Global XFR Wiper Counter Register to
Data Register
This transfers the contents of all Wiper Control
Registers to the specified associated Data
Registers.
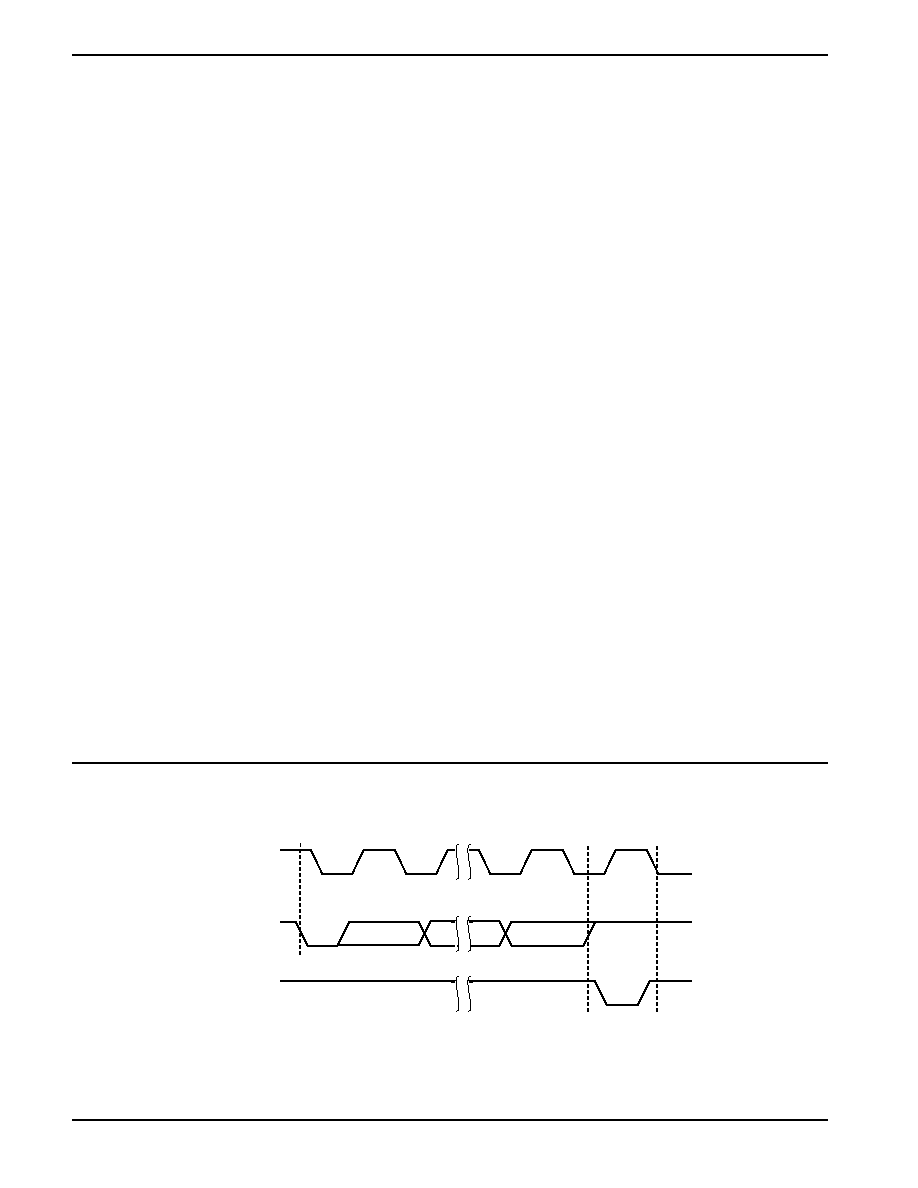
INCREMENT/DECREMENT COMMAND
The final command is Increment/Decrement (Figure 5
and 9). The Increment/Decrement command is different
from the other commands. Once the command is issued
and the CAT5221 has responded with an acknowledge,
the master can clock the selected wiper up and/or down
in one segment steps; thereby providing a fine tuning
capability to the host. For each SCL clock pulse (t
HIGH
)
while SDA is HIGH, the selected wiper will move one
resistor segment towards the R
H
terminal. Similarly, for
each SCL clock pulse while SDA is LOW, the selected
wiper will move one resistor segment towards the R
L
terminal.
See Instructions format for more detail.
Figure 7. Two-Byte Instruction Sequence
Figure 8. Three-Byte Instruction Sequence
Figure 9. Increment/Decrement Instruction Sequence
S
T
A
R
T
0
1
0
1
A2
A0
A
C
K
I2
I1
I0
R1 R0
A
C
K
SDA
S
T
O
P
ID3 ID2 ID1 ID0
Device ID
Internal
Instruction
Opcode
Address
Register
Address
0 P0
Pot/WCR
Address
A1
A3
I3
I3
I2
I1
I0
ID3 ID2 ID1 ID0
Device ID
Internal
Instruction
Opcode
Address
Data
Register
Address
S
T
A
R
T
0
1
0
1
A2 A1 A0
A
C
K
R0
Pot/WCR
Address
0
P0
A
C
K
SDA
S
T
O
P
I
N
C
1
I
N
C
2
I
N
C
n
D
E
C
1
D
E
C
n
R1
A3
I3
I2
I1
I0
R1 R0
ID3 ID2 ID1 ID0
Device ID
Internal
Instruction
Opcode
Address
Data
Register
Address
WCR[7:0]
or
Data Register D[7:0]
S
T
A
R
T
0
1
0
1
A2
A1
A0
A
C
K
Pot/WCR
Address
0 P0
A
C
K
SDA
S
T
O
P
A
C
K
D7
D6 D5 D4 D3 D2
D1 D0
A3

11
CAT5221
Document No. 2113, Rev. I
Figure 10. Increment/Decrement Timing Limits
SCL
SDA
R
W
INC/DEC
Command
Issued
Voltage Out
t
WRID
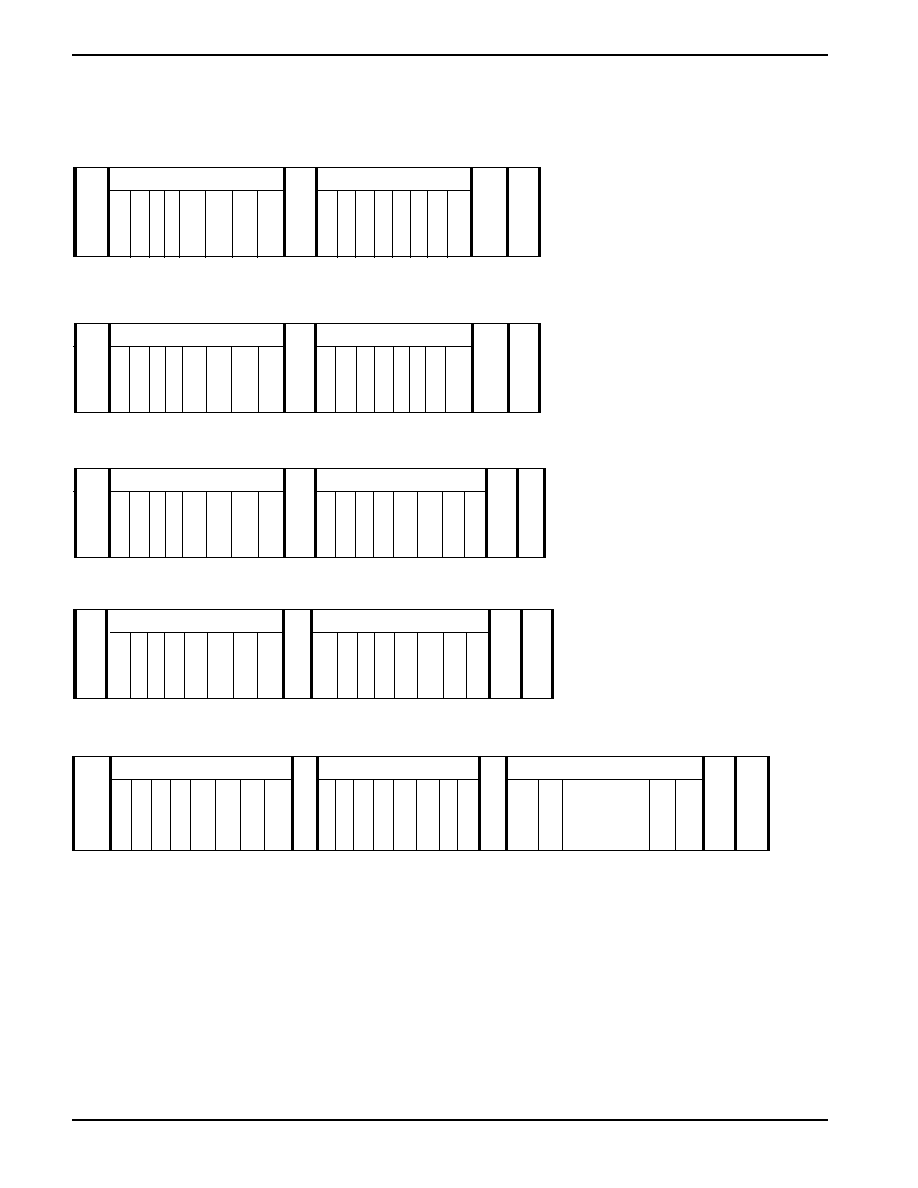
INSTRUCTION FORMAT
Read Wiper Control Register (WCR)
Write Wiper Control Register (WCR)
Read Data Register (DR)
Write Data Register (DR)
DEVICE ADDRESSES
INSTRUCTION
DATA
0
1 0 1 A3 A2 A1 A0
1 0 0 1 0 P0 0 0
7 6
5
4
3
2 1 0
S
T
A
R
T
A
C
K
A
C
K
A
C
K
S
T
O
P
DEVICE ADDRESSES
INSTRUCTION
DATA
0
1 0 1 A3 A2 A1 A0
1 0 1 1 0 P0 R1 R0
7 6
5
4
3
2 1 0
S
T
A
R
T
A
C
K
A
C
K
A
C
K
S
T
O
P
DEVICE ADDRESSES
INSTRUCTION
DATA
0
1 0 1 A3 A2 A1 A0
1 1 0 0 0 P0 R1 R0
7 6
5
4
3
2 1 0
S
T
A
R
T
A
C
K
A
C
K
A
C
K
S
T
O
P
DEVICE ADDRESSES
INSTRUCTION
DATA
0
1 0 1 A3 A2 A1 A0
1 0 1 0 0 P0 0 0
7 6
5
4
3
2 1 0
S
T
A
R
T
A
C
K
A
C
K
A
C
K
S
T
O
P
12
CAT5221
Document No. 2113, Rev. I
Notes:
(1) Any write or transfer to the Non-volatile Data Registers is followed by a high voltage cycle after a STOP has been issued.
DEVICE ADDRESS
INSTRUCTION
0 1 0 1 A3 A2 A1 A0
1 1 0 1 0 P0 R1R0
DEVICE ADDRESS
INSTRUCTION
0 1 0 1 A3 A2 A1 A0
1 0 0 0 0 0 R1 R0
Global Transfer Wiper Control Register (WCR) to Data Register (DR)
INSTRUCTION FORMAT
(continued)
Transfer Wiper Control Register (WCR) to Data Register (DR)
Transfer Data Register (DR) to Wiper Control Register (WCR)
S
T
A
R
T
A
C
K
A
C
K
S
T
O
P
Increment (I)/Decrement (D) Wiper Control Register (WCR)
Global Transfer Data Register (DR) to Wiper Control Register (WCR)
A
C
K
A
C
K
S
T
O
P
S
T
A
R
T
DEVICE ADDRESS
INSTRUCTION
0 1 0 1 A3 A2 A1 A0
0 0 0 1 0 0 R1 R0
A
C
K
A
C
K
S
T
O
P
S
T
A
R
T
DEVICE ADDRESS
INSTRUCTION
0 1 0 1 A3 A2 A1 A0
1 1 1 0 0 P0 R1R0
A
C
K
A
C
K
S
T
O
P
S
T
A
R
T
DEVICE ADDRESS
INSTRUCTION
DATA
0
1 0 1 A3 A2 A1 A0
0 0 1 0 0 P0 0 0
I/D I/D
I/D I/D
S
T
A
R
T
A
C
K
A
C
K
A
C
K
S
T
O
P
� � �
13
CAT5221
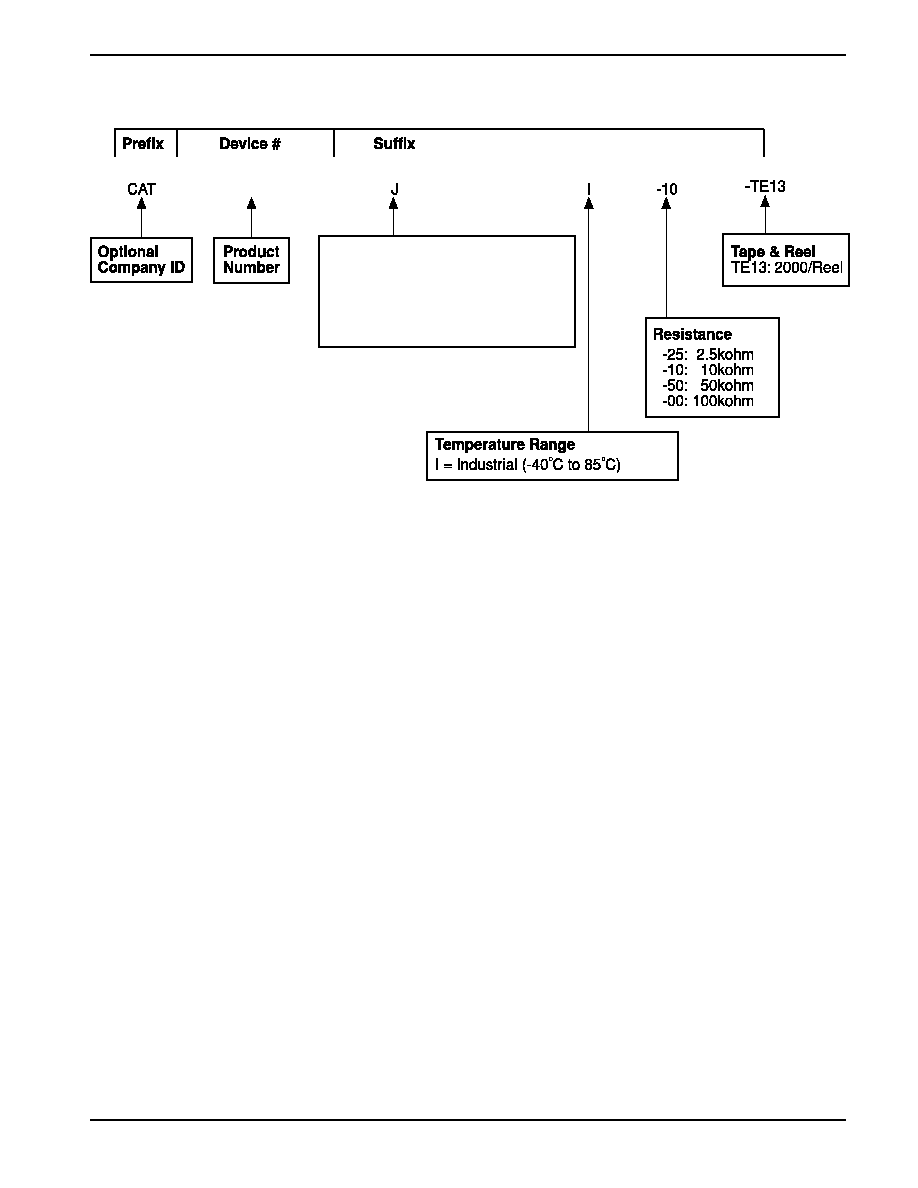
Document No. 2113, Rev. I
5221
5221
Package
J: SOIC
U: TSSOP
W: SOIC (Lead free, Halogen free)
Y: TSSOP (Lead free, Halogen free)
Notes:
(1) The device used in the above example is a CAT5221JI-10-TE13 (SOIC, Industrial Temperature, 10kohm, Tape & Reel)
ORDERING INFORMATION
14
CAT5221
Document No. 2113, Rev. I
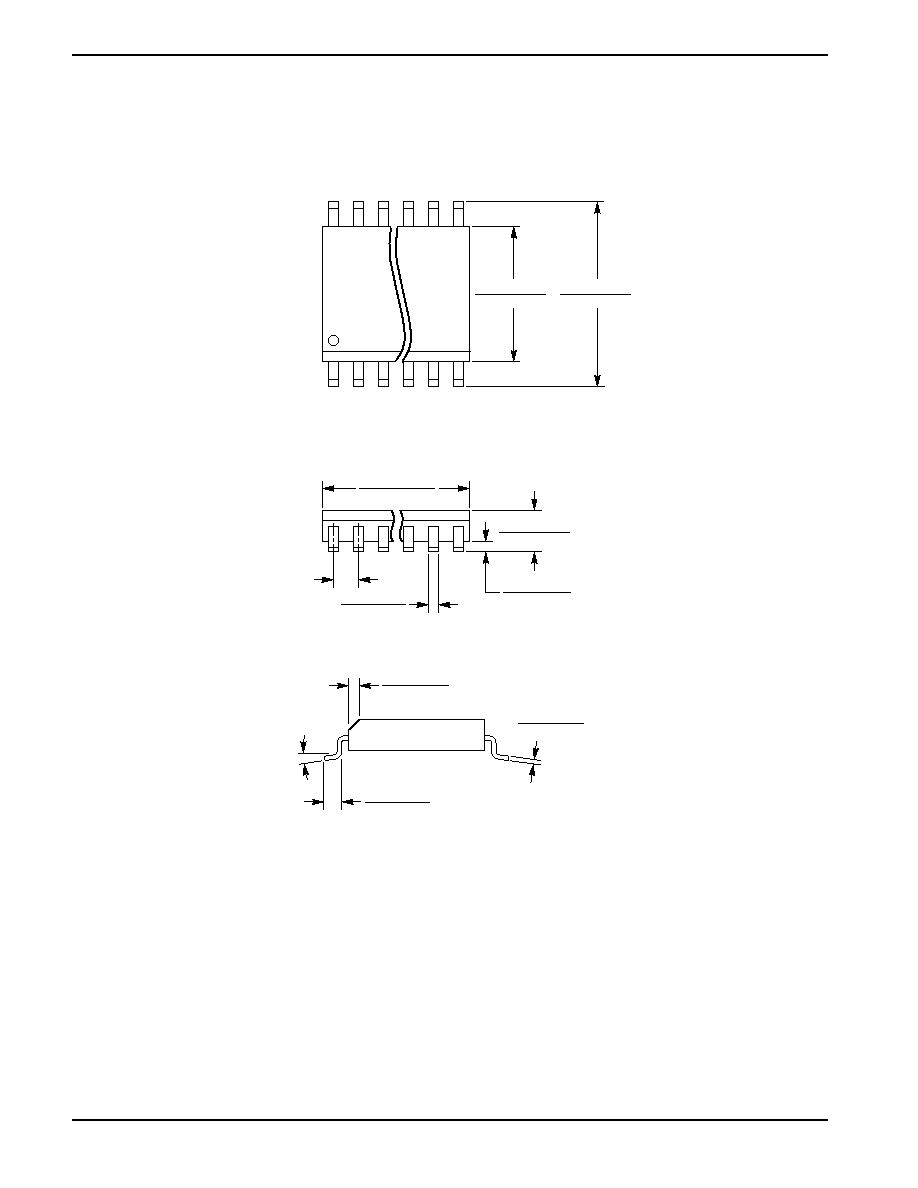
20-LEAD 300 MIL WIDE SOIC (J, W)
0.2914 (7.40)
0.2992 (7.60)
0.394 (10.00)
0.419 (10.65)
0.0926 (2.35)
0.1043 (2.65)
0.0040 (0.10)
0.0118 (0.30)
0.050 (1.27) BSC
0.013 (0.33)
0.020 (0.51)
0 --8
0.0091 (0.23)
0.0125 (0.32)
0.010 (0.25)
0.029 (0.75)
X 45
0.016 (0.40)
0.050 (1.27)
0.5985 (15.20)
0.6141 (15.60)
PACKAGING INFORMATION

15
CAT5221
Document No. 2113, Rev. I
20-LEAD TSSOP (U, Y)
E1
1.0
1.0
D
A1
A2
A
b
2
e
b
0.20
R1
R
1
GAUGE PLANE
3
L
L1
DETAIL A
b1
c1
c
SECTION A-A
0.076MM
SEATING PLANE
E
DETAIL A
A
A
SYMBOL
A
A1
A2
L
D
E
E1
R
R1
b
b1
c
c1
L1
e
1
2
3
N
REF
DIMENSION IN MM
DIMENSION IN INCH
MIN
MIN
NOM
NOM
MAX
MAX
1.20
0.15
1.05
0.75
6.60
6.50
4.50
0.30
0.25
0.20
0.16
0.05
0.80
0.50
6.40
6.30
4.30
0.09
0.09
0.19
0.19
0.09
0.09
0.90
0.60
6.50
6.40
4.40
0.22
.002
.031
.020
.252
.248
.169
.004
.004
.007
.007
.004
.004
.035
.024
.256
.252
.173
.009
.043
.006
.041
.030
.260
.256
.177
.012
.010
.008
.006
1.0 REF
0.65 BSC
.039 REF
.026 BSC
0
8
0
8
12 REF
12 REF
12 REF
12 REF
20
JEDEC M0-153 VARIATION AC
Catalyst Semiconductor, Inc.
Corporate Headquarters
1250 Borregas Avenue
Sunnyvale, CA 94089
Phone: 408.542.1000
Fax: 408.542.1200
www.catalyst-semiconductor.com
Publication #:
2113
Revison:
I
Issue date:
4/01/04
Copyrights, Trademarks and Patents
Trademarks and registered trademarks of Catalyst Semiconductor include each of the following:
DPP TM
DPPs TM
AE
2
TM
I
2
C is a trademark of Philips Corporation
Catalyst Semiconductor has been issued U.S. and foreign patents and has patent applications pending that protect its products. For a complete list of patents
issued to Catalyst Semiconductor contact the Company's corporate office at 408.542.1000.
CATALYST SEMICONDUCTOR MAKES NO WARRANTY, REPRESENTATION OR GUARANTEE, EXPRESS OR IMPLIED, REGARDING THE SUITABILITY OF ITS
PRODUCTS FOR ANY PARTICULAR PURPOSE, NOR THAT THE USE OF ITS PRODUCTS WILL NOT INFRINGE ITS INTELLECTUAL PROPERTY RIGHTS OR THE
RIGHTS OF THIRD PARTIES WITH RESPECT TO ANY PARTICULAR USE OR APPLICATION AND SPECIFICALLY DISCLAIMS ANY AND ALL LIABILITY ARISING
OUT OF ANY SUCH USE OR APPLICATION, INCLUDING BUT NOT LIMITED TO, CONSEQUENTIAL OR INCIDENTAL DAMAGES.
Catalyst Semiconductor products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or
other applications intended to support or sustain life, or for any other application in which the failure of the Catalyst Semiconductor product could create a
situation where personal injury or death may occur.
Catalyst Semiconductor reserves the right to make changes to or discontinue any product or service described herein without notice. Products with data sheets
labeled "Advance Information" or "Preliminary" and other products described herein may not be in production or offered for sale.
Catalyst Semiconductor advises customers to obtain the current version of the relevant product information before placing orders. Circuit diagrams illustrate
typical semiconductor applications and may not be complete.
Date
Rev.
Reason
9/30/2003
E
Deleted WP from Functional Diagram, pg. 1
10/1/2003
F
Changed designation to Advance
3/10/2004
G
Added TSSOP package in all areas
3/25/2004
H
Updated TSSOP package drawing
04/01/04
I
Eliminated data sheet designation
Update Features
Update Description
Update Pin Description
Update device Operation
Update Absolute Maximum Ratings
Update Recommended Operating Conditions
Update Potentiometer Characteristics
Update Instructions
Update Ordering Information
REVISION HISTORY