
Copyright
� Cirrus Logic, Inc. 2005
(All Rights Reserved)
http://www.cirrus.com
CS5378
Low-power Single-channel Decimation Filter
Features
Single-channel Digital Decimation Filter
Multiple On-chip FIR and IIR Coefficient Sets
Programmable Coefficients for Custom Filters
Synchronous Operation
Integrated PLL for Clock Generation
1.024 MHz, 2.048 MHz, or 4.096 MHz Input
Standard Clock or Manchester Input
Selectable Output Word Rate
4000, 2000, 1000, 500, 333, 250 SPS
200, 125, 100, 50, 40, 25, 20, 10, 5, 1 SPS
Digital Gain and Offset Corrections
Test DAC Bit-stream Generator
Sine Wave or Impulse Output Mode
Time Break Controller, General-purpose I/O
Microcontroller or EEPROM Configuration
Small-footprint, 28-pin SSOP Package
Low Power Consumption
16 mW at 500 SPS OWR
Flexible Power Supplies
I/O Interface and PLL: 3.3 V or 5.0 V
Digital Logic Core: 2.5 V, 3.3 V or 5.0 V
Description
The CS5378 is a multi-function digital filter utilizing a low-
power signal processing architecture to achieve efficient
filtering for a delta-sigma-type modulator. By combining
the CS5378 with a CS3301/02 differential amplifier, a
CS5371 modulator, and a CS4373 test DAC, a synchro-
nous high-resolution measurement system can be
designed quickly and easily.
Digital filter coefficients for the CS5378 FIR and IIR filters
are included on-chip for a simple setup, or they can be
programmed for custom applications. Selectable digital
filter decimation ratios produce output word rates from
4000 SPS to 1 SPS, resulting in measurement band-
widths ranging from 1600 Hz down to 400 mHz when
using the on-chip coefficient sets.
The CS5378 includes integrated peripherals to simplify
system design: a low-jitter PLL for standard clock or
manchester inputs, offset and gain corrections, a test
DAC bit stream generator, a time break controller, and
eight general-purpose I/O pins.
ORDERING INFORMATION
See
page 86
.
I
Serial Interface
Decimation and
Filtering Engine
Modulator Data Interface
Test Bit Stream
Controller
Reset, Synchronization
TBSDATA
Time Break Controller
GPIO
General Purpose I/O
SCK
MO
S
I
V
D
DPAD
VD
D
P
L
L
VD
D
C
O
R
E
SYNC
MSYNC
TIMEB
GPIO5:PLL1
GPIO4:PLL0
GPIO3
GPIO2
GPIO1
G
NDPAD
G
NDC
O
R
E
GN
DP
L
L
MD
AT
A
MF
LAG
GPIO0
GPIO6:PLL2
GPIO7:BOOT
DR
DY
MI
S
O
SS:
E
E
C
S
RESET
CLK
MCLK
PLL, Clock Generation
OCT `05
DS639F1

CS5378
DS639F1
2
TABLE OF CONTENTS
1. General Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1. Digital Filter Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
1.2. Integrated Peripheral Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
1.3. System Level Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
1.4. Configuration Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
2. Characteristics and Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Specified Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
Absolute Maximum Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
Thermal Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
Digital Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
Power Consumption. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
Switching Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
3. System Design with CS5378 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.1. Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
3.2. Reset Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
3.3. PLL and Clock Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
3.4. Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
3.5. System Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
3.6. Digital Filter Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
3.7. Data Collection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
3.8. Integrated peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
4. Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
4.2. Bypass Capacitors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
4.3. Power Consumption. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
5. Reset Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
5.2. Reset Self-Tests. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
5.3. Boot Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
6. PLL and Clock Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
6.2. PLL Mode Select . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
6.3. Synchronous Clocking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
6.4. Master Clock Jitter and Skew. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
7. Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.1. Pin Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
7.2. MSYNC Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
7.3. Digital Filter Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
7.4. Modulator Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
7.5. Test Bit Stream Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
8. Configuration By EEPROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
8.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
8.2. EEPROM Hardware Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
8.3. EEPROM Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
8.4. EEPROM Configuration Commands . . . . . . . . . . . . . . . . . . . . . . . . . . .27
8.5. Example EEPROM Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
9. Configuration By Microcontroller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30

CS5378
DS639F1
3
9.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
9.2. Microcontroller Hardware Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
9.3. Microcontroller Serial Transactions . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
9.4. Microcontroller Configuration Commands . . . . . . . . . . . . . . . . . . . . . . .33
9.5. Example Microcontroller Configuration . . . . . . . . . . . . . . . . . . . . . . . . .35
10. Modulator Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
10.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
10.2. Modulator Clock Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
10.3. Modulator Synchronization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
10.4. Modulator Data Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
10.5. Modulator Flag Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
11. Digital Filter Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
11.1. Filter Coefficient Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
11.2. Filter Configuration Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
12. SINC Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
12.1. SINC1 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
12.2. SINC2 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
12.3. SINC3 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
12.4. SINC Filter Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
13. FIR Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
13.1. FIR1 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
13.2. FIR2 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
13.3. On-Chip FIR Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
13.4. Programmable FIR Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
13.5. FIR Filter Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
14. IIR Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
14.1. IIR Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
14.2. IIR1 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
14.3. IIR2 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
14.4. IIR3 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
14.5. On-Chip IIR Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
14.6. Programmable IIR Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
14.7. IIR Filter Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
15. Gain and Offset Correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
15.1. Gain Correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
15.2. Offset Correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
15.3. Offset Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
16. Serial Data Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
16.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
16.2. Serial Data Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
16.3. Serial Data Transactions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59
17. Test Bit Stream Generator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
17.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
17.2. TBS Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
17.3. TBS Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
17.4. TBS Data Source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
17.5. TBS Sine Wave Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
17.6. TBS Impulse Output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62

CS5378
DS639F1
4
17.7. TBS Loopback Testing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
17.8. TBS Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
18. Time Break Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
18.1. Pin Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
18.2. Time Break Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
18.3. Time Break Delay. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
19. General Purpose I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
19.1. Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
19.2. GPIO Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
19.3. GPIO Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
19.4. GPIO Input Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
19.5. GPIO Output Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
20. Register Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
20.1. SPI Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
20.2. Digital Filter Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
21. Pin Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
22. Package Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
23. Ordering Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
24. Environmental, Manufacturing, & Handling Information . . . . . . . . . . 86
25. Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
LIST OF FIGURES
Figure 1. CS5378 Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 2. Digital Filtering Stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 3. FIR and IIR Coefficient Set Selection Word . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 4. MOSI Write Timing in SPI Slave Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 5. MISO Read Timing in SPI Slave Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 6. Serial Data Read Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Figure 7. SYNC, MCLK, MSYNC, MDATA Interface Timing. . . . . . . . . . . . . . . . . . . . . 16
Figure 8. TBS Output Data Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 9. Single-Channel System Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 10. Power Supply Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 11. Reset Control Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 12. Clock Generation Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 13. Synchronization Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 14. EEPROM Configuration Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 15. EEPROM Serial Read Transactions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figure 16. 8 Kbyte EEPROM Memory Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figure 17. Serial Interface Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 18. Microcontroller Serial Transactions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figure 19. SPI Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figure 20. Modulator Data Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 21. Digital Filter Stages. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 22. FIR and IIR Coefficient Set Selection Word . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 23. SINC Filter Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 24. SINC Filter Stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 25. FIR Filter Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Figure 26. FIR Filter Stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46

CS5378
DS639F1
5
Figure 27. FIR1 Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Figure 28. FIR2 Linear Phase Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Figure 29. FIR2 Minimum Phase Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Figure 30. IIR Filter Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Figure 31. IIR Filter Stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figure 32. Gain and Offset Correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Figure 33. Serial Data Interface Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Figure 34. 32-bit Serial Data Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Figure 35. SD Port Transaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Figure 36. Test Bit Stream Generator Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Figure 37. Time Break Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Figure 38. GPIO Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figure 39. SPI Control Register SPICTRL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Figure 40. SPI Command Register SPICMD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Figure 41. SPI Data Register SPIDAT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Figure 42. SPI Data Register SPIDAT2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Figure 43. Hardware Configuration Register CONFIG. . . . . . . . . . . . . . . . . . . . . . . . . . 72
Figure 44. GPIO Configuration Register GPCFG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figure 45. Filter Configuration Register FILTCFG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Figure 46. Gain Correction Register GAIN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Figure 47. Offset Correction Register OFFSET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Figure 48. Time Break Counter Register TIMEBRK . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Figure 49. Test Bit Stream Configuration Register TBSCFG. . . . . . . . . . . . . . . . . . . . . 78
Figure 50. Test Bit Stream Gain Register TBSGAIN . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Figure 51. User Defined System Register SYSTEM1 . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Figure 52. Hardware Version ID Register VERSION . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Figure 53. Self Test Result Register SELFTEST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Figure 54. CS5378 Pin Assignments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
LIST OF TABLES
Table 1. Microcontroller and EEPROM Configuration Commands . . . . . . . . . . . . . . . . . 9
Table 2. TBS Configurations Using On-Chip Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Table 3. SPI and Digital Filter Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Table 4. PLL and BOOT Mode Reset Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Table 5. PLL Mode Selections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Table 6. Maximum EEPROM Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Table 7. EEPROM Boot Configuration Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 8. Example EEPROM File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Table 9. Microcontroller Boot Configuration Commands . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 10. Example Microcontroller Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 11. SINC Filter Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Table 12. SINC1 and SINC2 Filter Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 13. SINC3 Filter Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 14. FIR Filter Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Table 15. SINC + FIR Group Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Table 16. Minimum Phase Group Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Table 16. IIR Filter Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Table 17. IIR Filter Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 18. TBS Configurations Using On-Chip Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Table 19. TBS Impulse Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62

CS5378
DS639F1
6
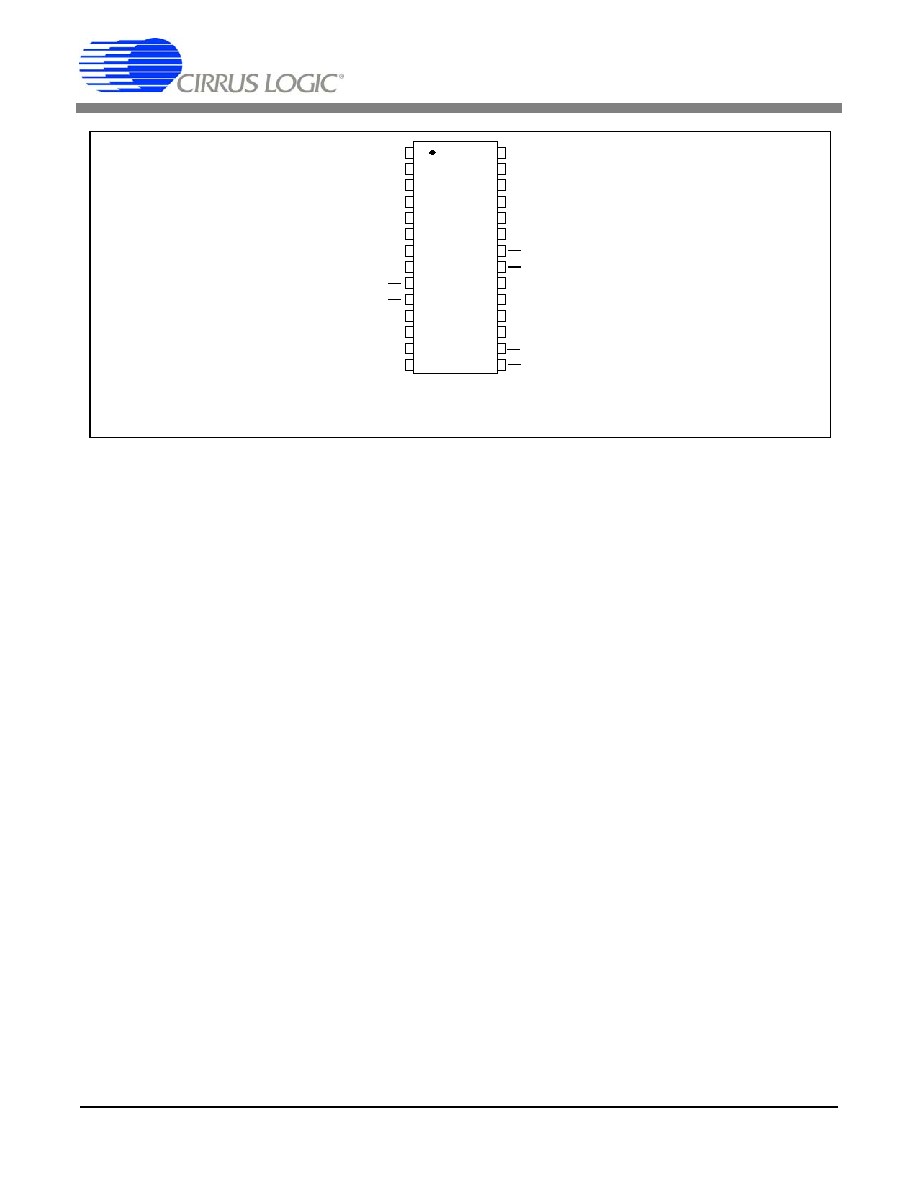
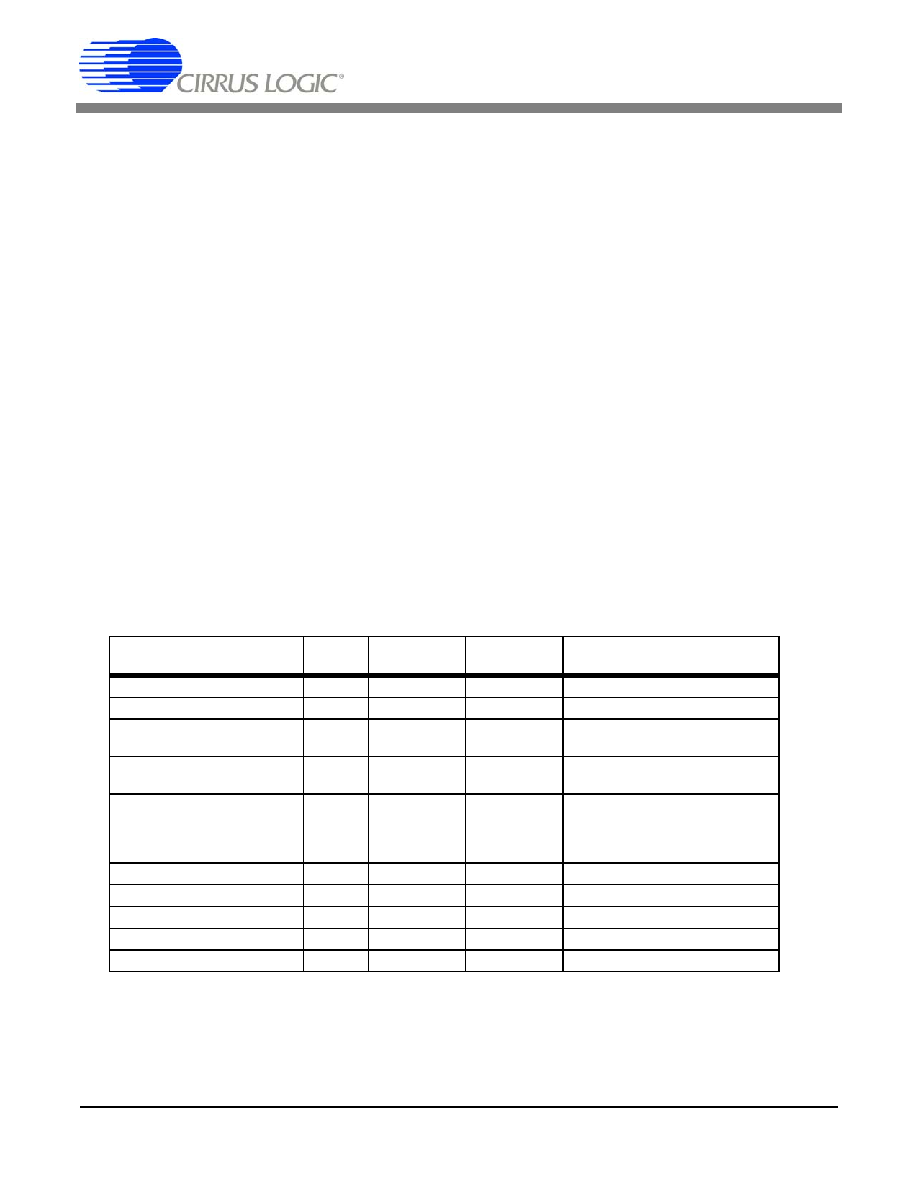
1. GENERAL DESCRIPTION
The CS5378 is a single channel digital filter with
integrated system peripherals. Figure 1 illustrates a
simplified block diagram of the CS5378.
1.1 Digital Filter Features
�
Single channel decimation filter for CS5371
modulator.
�
Synchronous operation for simultaneous sam-
pling in multi-sensor systems.
-
Internal synchronization of digital filter
phase to an external SYNC signal.
�
Output word rates, including low bandwidth
rates.
-
Standard output rates: 4000, 2000, 1000,
500, 333, 250 SPS.
-
Low bandwidth rates: 200, 125, 100, 50,
40, 25, 20, 10, 5, 1 SPS.
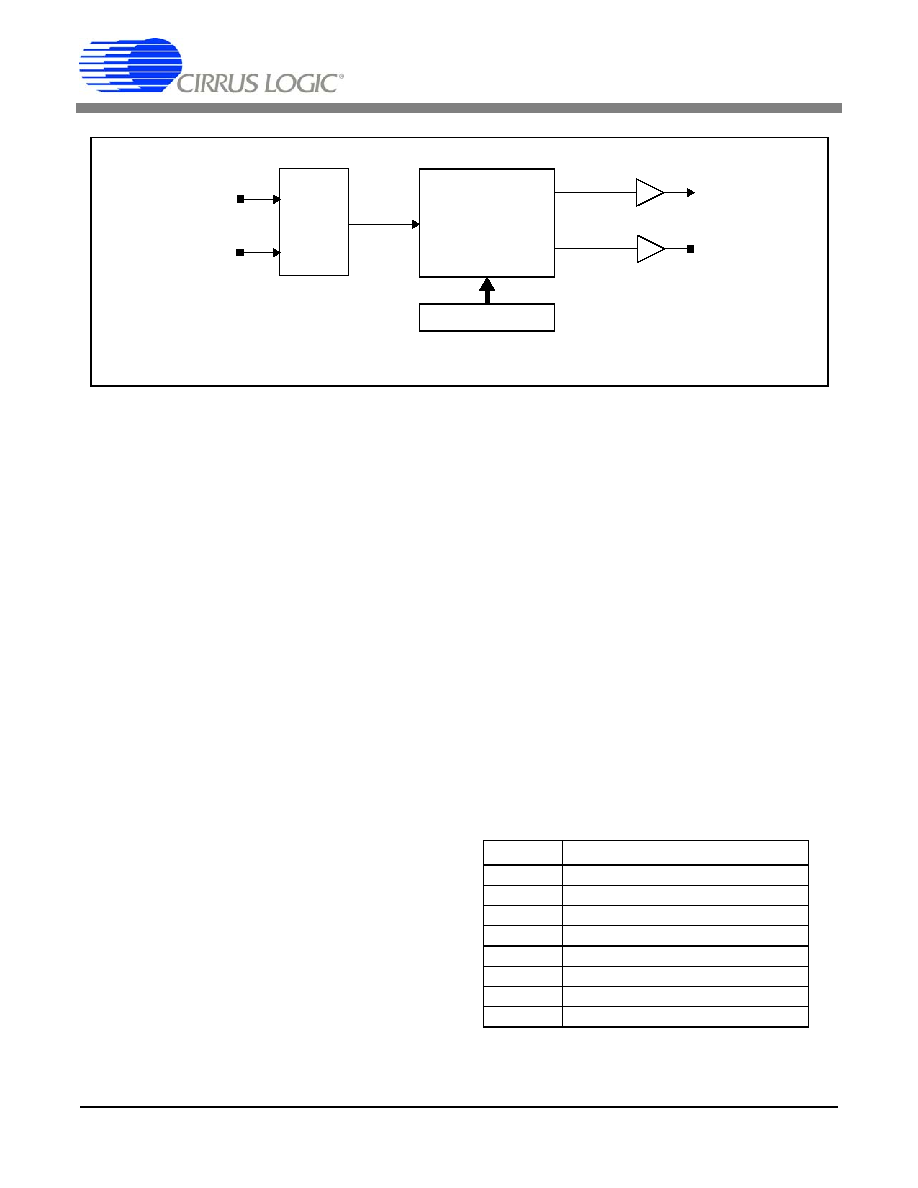
�
Flexible digital filter configuration. (See Figure
2)
-
Cascaded SINC, FIR, and IIR filters with
selectable output stage.
-
Linear and minimum phase FIR low-pass
filter coefficients included.
-
3 Hz Butterworth IIR high-pass filter coef-
ficients included.
-
FIR and IIR coefficients programmable to
create a custom filter response.
�
Digital gain correction to normalize sensor
gain.
�
Digital offset correction and calibration.
-
Offset correction to remove measurement
Serial Interface
Decimation and
Filtering Engine
Modulator Data Interface
Test Bit Stream
Controller
Reset, Synchronization
TBSDATA
Time Break Controller
GPIO
General Purpose I/O
SC
K
MO
S
I
V
D
DP
AD
VDD
P
L
L
V
D
DCORE
SYNC
MSYNC
TIMEB
GPIO5:PLL1
GPIO4:PLL0
GPIO3
GPIO2
GPIO1
GNDP
A
D
G
N
DCORE
GNDP
L
L
MDA
T
A
MFLA
G
GPIO0
GPIO6:PLL2
GPIO7:BOOT
DRDY
MI
S
O
SS:
EECS
RESET
CLK
MCLK
PLL, Clock Generation
Figure 1. CS5378 Block Diagram

CS5378
DS639F1
7
DC offset.
-
Calibration engine for automatic calcula-
tion of offset correction factor.
1.2 Integrated Peripheral Features
�
Low jitter PLL to generate local clocks.
-
1.024 MHz, 2.048 MHz, 4.096 MHz stan-
dard clock or manchester encoded input.
�
Synchronous operation for simultaneous sam-
pling in multi-sensor systems.
-
MCLK / MSYNC output signals to syn-
chronize external components.
�
High speed serial data output.
-
Asynchronous operation to 4 MHz for di-
rect connection to system telemetry.
-
Internal 8-deep data FIFO for flexible out-
put timing.
-
Selectable 24-bit data only or 32-bit sta-
tus+data output.
�
Digital test bit stream signal generator suitable
for CS4373
test DAC.
-
Sine wave output mode for testing total har-
monic distortion.
-
Impulse output mode for transfer function
characterization.
�
Time break controller to record system timing
information.
-
Dedicated TB status bit in the output data
stream.
-
Programmable output delay to match sys-
tem group delay.
�
8 General Purpose I/O (GPIO) pins for local
hardware control.
1.3 System Level Features
�
Flexible configuration options.
-
Configuration 'on-the-fly' via microcontrol-
ler or system telemetry.
-
Fixed configuration via stand-alone boot
EEPROM.
�
Low power consumption.
-
16 mW at 500 SPS OWR.
-
100
�W standby mode.
�
Flexible power supply configurations.
-
Separate digital logic core, telemetry I/O,
Figure 2. Digital Filtering Stages
Sinc Filter
2 - 64000
FIR1
4
FIR2
2
IIR1
IIR2
1
st
Order
2
nd
Order
Output to High Speed Serial Interface
DC Offset
Corrections
Output Word Rate from 4000 SPS ~ 1 SPS
Gain &
Modulator
512 kHz
Input

CS5378
DS639F1
8
and PLL power supplies.
-
Telemetry I/O and PLL interfaces operate
from 3.3 V or 5 V.
-
Digital logic core operates from 2.5 V,
3.3 V or 5 V.
�
Small 28-pin SSOP package.
-
Total footprint 8 mm x 10 mm plus three
bypass capacitors.
1.4 Configuration Interface
�
Configuration from microcontroller or stand-
alone boot EEPROM.
-
Microcontroller boot permits reconfigura-
tion during operation.
-
EEPROM boot sets a fixed operational con-
figuration.
�
Configuration commands written through the
serial interface. (See Table 1)
-
Standardized microcontroller interface us-
ing SPI registers. (See Table 3)
-
Commands write digital filter registers and
FIR / IIR filter coefficients.
-
Digital filter registers set hardware config-
uration options.

CS5378
DS639F1
9
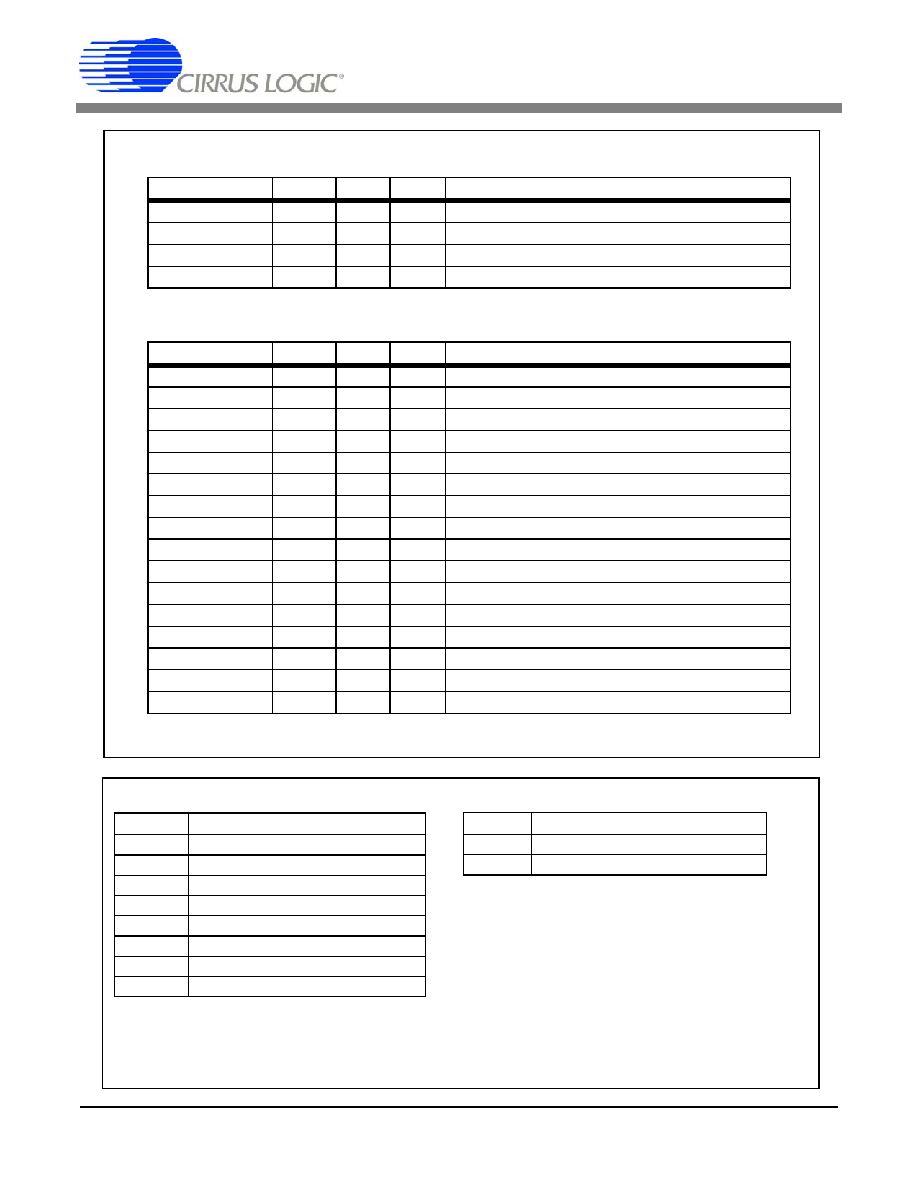
Microcontroller Boot Configuration Commands
EEPROM Boot Configuration Commands
[DATA] indicates data word returned from digital filter.
(DATA) indicates multiple words of this type are to be written.
Name
CMD
24-bit
DAT1
24-bit
DAT2
24-bit
Description
NOP
000000
-
-
No Operation
WRITE DF REGISTER
000001
REG
DATA
Write Digital Filter Register
READ DF REGISTER
000002
REG
[DATA]
-
-
Read Digital Filter Register
WRITE FIR COEFFICIENTS
000003
NUM FIR1
(FIR COEF)
NUM FIR2
(FIR COEF)
Write Custom FIR Coefficients
WRITE IIR COEFFICIENTS
000004
a11
b11
a22
b21
b10
a21
b20
b22
Write Custom IIR Coefficients
WRITE ROM COEFFICIENTS
000005
COEF SEL
-
Use On-Chip Coefficients
NOP
000006
-
-
No Operation
NOP
000007
-
-
No Operation
FILTER START
000008
-
-
Start Digital Filter Operation
FILTER STOP
000009
-
-
Stop Digital Filter Operation
Name
CMD
8-bit
DATA
24-bit
Description
NOP
00
-
No Operation
WRITE DF REGISTER
01
REG
DATA
Write Digital Filter Register
WRITE FIR COEFFICIENTS
02
NUM FIR1
NUM FIR2
(FIR COEF)
Write Custom FIR Coefficients
WRITE IIR COEFFICIENTS
03
a11
b10
b11
a21
a22
b20
b21
b22
Write Custom IIR Coefficients
WRITE ROM COEFFICIENTS
04
COEF SEL
Use On-Chip Coefficients
NOP
05
-
No Operation
NOP
06
-
No Operation
FILTER START
07
-
Start Digital Filter Operation
Table 1. Microcontroller and EEPROM Configuration Commands

CS5378
DS639F1
10
Bits
23:20
19:16
15:12
11:8
7:4
3:0
Selection
0000
0000
IIR2
IIR1
FIR2
FIR1
Figure 3. FIR and IIR Coefficient Set Selection Word
Bits 15:12
IIR2 Coefficients
0000
3 Hz @ 2000 SPS
0001
3 Hz @ 1000 SPS
0010
3 Hz @ 500 SPS
0011
3 Hz @ 333 SPS
0100
3 Hz @ 250 SPS
Bits 11:8
IIR1 Coefficients
0000
3 Hz @ 2000 SPS
0001
3 Hz @ 1000 SPS
0010
3 Hz @ 500 SPS
0011
3 Hz @ 333 SPS
0100
3 Hz @ 250 SPS
Bits 7:4
FIR2 Coefficients
0000
Linear Phase
0001
Minimum Phase
Bits 3:0
FIR1 Coefficients
0000
Linear Phase
0001
Minimum Phase
Test Bit Stream Characteristic Equation:
(Signal Freq) * (# TBS Data) * (Interpolation + 1) = Output Rate
Example: (31.25 Hz) * (1024) * (0x07 + 1) = 256 kHz
Signal
Frequency
(TBSDATA)
Output
Rate
(TBSCLK)
Output Rate
Selection
(RATE)
Interpolation
Selection
(INTP)
10.00 Hz
256 kHz
0x4
0x18
10.00 Hz
512 kHz
0x5
0x31
25.00 Hz
256 kHz
0x4
0x09
25.00 Hz
512 kHz
0x5
0x13
31.25 Hz
256 kHz
0x4
0x07
31.25 Hz
512 kHz
0x5
0x0F
50.00 Hz
256 kHz
0x4
0x04
50.00 Hz
512 kHz
0x5
0x09
125.00 Hz
256 kHz
0x4
0x01
125.00 Hz
512 kHz
0x5
0x03
Table 2. TBS Configurations Using On-Chip Data
CS5378
DS639F1
11
SPI Registers
Digital Filter Registers
Name
Addr.
Type
# Bits
Description
SPICTRL
00 - 02
R/W
8, 8, 8
SPI Control
SPICMD
03 - 05
R/W
8, 8, 8
SPI Command
SPIDAT1
06 - 08
R/W
8, 8, 8
SPI Data 1
SPIDAT2
09 - 0B
R/W
8, 8, 8
SPI Data 2
Name
Addr.
Type
# Bits
Description
CONFIG
00
R/W
24
Hardware Configuration
RESERVED
01-0D
R/W
24
Reserved
GPCFG
0E
R/W
24
GPIO[7:0] Direction, Pull-up Enable, and Data
RESERVED
0F-1F
R/W
24
Reserved
FILTCFG
20
R/W
24
Digital Filter Configuration
GAIN
21
R/W
24
Gain Correction
RESERVED
22-24
R/W
24
Reserved
OFFSET
25
R/W
24
Offset Correction
RESERVED
26-28
R/W
24
Reserved
TIMEBRK
29
R/W
24
Time Break Delay
TBSCFG
2A
R/W
24
Test Bit Stream Configuration
TBSGAIN
2B
R/W
24
Test Bit Stream Gain
SYSTEM1
2C
R/W
24
User Defined System Register 1
SYSTEM2
2D
R/W
24
User Defined System Register 2
VERSION
2E
R/W
24
Hardware Version ID
SELFTEST
2F
R/W
24
Self-Test Result Code
Table 3. SPI and Digital Filter Registers
Table 4. PLL and BOOT Mode Reset Configurations
PLL[2:0]
Mode Selection on Reset
111
32.768 MHz clock input (PLL bypass).
110
1.024 MHz clock input.
101
2.048 MHz clock input.
100
4.096 MHz clock input.
011
32.768 MHz clock input (PLL bypass).
010
1.024 MHz manchester input.
001
2.048 MHz manchester input.
000
4.096 MHz manchester input.
Configuration Note:
States of the PLL[2:0] and BOOT pins are
latched immediately after reset to select modes.
These pins have a weak (~100 k
) pull-up re-
sistor enabled by default. An external 10 k
pull-down is required to set a low condition.
BOOT
Mode Selection on Reset
1
EEPROM boot
0
Microcontroller boot

CS5378
DS639F1
12
2. CHARACTERISTICS AND SPECIFICATIONS
�
Min / Max characteristics and specifications are guaranteed over the Specified Operating Conditions.
�
Typical performance characteristics and specifications are derived from measurements taken at nomi-
nal supply voltages and T
A
= 25
�C.
�
GND, GND1, GND2 = 0 V, all voltages with respect to 0 V.
SPECIFIED OPERATING CONDITIONS
ABSOLUTE MAXIMUM RATINGS
1. Transient currents up to 100 mA will not cause SCR latch-up.
Parameter
Symbol Min Nom
Max
Unit
Logic Core Power Supply
VDDCORE
2.375
2.5
5.25
V
PLL Power Supply
VDDPLL
3.135
3.3
5.25
V
I/O Power Supply
VDDPAD
3.135
3.3
5.25
V
Ambient Operating Temperature
Industrial (-IQ)
T
A
-40
-
85
�C
Parameter
Symbol
Min
Max
Units
DC Power Supplies
Logic Core
PLL
I/O
VDDCORE
VDDPLL
VDDPAD
-0.3
-0.3
-0.3
6.0
6.0
6.0
V
V
V
Input Current, Any Pin Except Supplies
(Note 1)
I
IN
-
�10
mA
Input Current, Power Supplies
(Note 1)
I
IN
-
�50
mA
Output Current
(Note 1)
I
OUT
-
�25
mA
Power Dissipation
P
DN
-
500
mW
Digital Input Voltages
V
IND
-0.3
VDD+0.3
V
Ambient Operating Temperature (Power Applied)
T
A
-40
85
�C
Storage Temperature Range
T
STG
-65
150
�C

CS5378
DS639F1
13
THERMAL CHARACTERISTICS
DIGITAL CHARACTERISTICS
Notes: 2. Maximum leakage for pins with pull-up resistors (RESET, SS:EECS, GPIO, MOSI, SCK) is �250
�A.
POWER CONSUMPTION
Parameter
Symbol Min Typ
Max
Unit
Allowable Junction Temperature
T
J
-
-
135
�C
Junction to Ambient Thermal Impedance (4-Layer PCB)
JA
-
50
�C / W
Ambient Operating Temperature (Power Applied)
T
A
-40
-
+85
�C
Parameter
Symbol Min Typ
Max
Unit
High-Level Input Drive Voltage
V
IH
0.6 * VDD
-
VDD
V
Low-Level Input Drive Voltage
V
IL
0.0
-
0.8
V
High-Level Output Drive Voltage
I
out
= -40 �A
V
OH
VDD - 0.3
-
VDD
V
Low-Level Output Drive Voltage
I
out
= +40 �A
V
OL
0.0
-
0.3
V
Rise Times, Digital Inputs
t
RISE
-
-
100
ns
Fall Times, Digital Inputs
t
FALL
-
-
100
ns
Rise Times, Digital Outputs
t
RISE
-
-
100
ns
Fall Times, Digital Outputs
t
FALL
-
-
100
ns
Input Leakage Current
(Note 2)
I
IN
-
� 1
� 10
�A
3-State Leakage Current
I
OZ
-
-
� 10
�A
Digital Input Capacitance
C
IN
-
9
-
pF
Digital Output Pin Capacitance
C
OUT
-
9
-
pF
Parameter
Symbol Min Typ
Max
Unit
Operational Power Consumption
1.024 MHz Digital Filter Clock
PWR
1
-
12
-
mW
2.048 MHz Digital Filter Clock
PWR
2
-
14
-
mW
4.096 MHz Digital Filter Clock
PWR
4
-
16
-
mW
8.192 MHz Digital Filter Clock
PWR
8
-
24
-
mW
Standby Power Consumption
32 kHz Digital Filter Clock, Filter Stopped
PWR
S
-
100
-
�W
2 .6 V
0.7 V
t
fa llin
t
ris e in
4 .6 V
0 .4 V
t
rise ou t
t
fallo ut
0.90 * VDD
0.10 * VDD
0.90 * VDD
0.10 * VDD

CS5378
DS639F1
14
SWITCHING CHARACTERISTICS
Serial Configuration Interface Timing (External Master)
Parameter
Symbol Min Typ
Max
Unit
MOSI Write Timing
SS:EECS Enable to Valid Latch Clock
t
1
60
-
-
ns
Data Set-up Time Prior to SCK Rising
t
2
60
-
-
ns
Data Hold Time After SCK Rising
t
3
120
-
-
ns
SCK High Time
t
4
120
-
-
ns
SCK Low Time
t
5
120
-
-
ns
SCK Falling Prior to SS:EECS Disable
t
6
60
-
-
ns
MISO Read Timing
SCK Falling to New Data Bit
t
7
-
-
200
ns
SCK High Time
t
8
120
-
-
ns
SCK Low Time
t
9
120
-
-
ns
SS:EECS Rising to MISO Hi-Z
t
10
-
-
150
ns
Figure 4. MOSI Write Timing in SPI Slave Mode
SSI
MOSI
SCLK
MSB
MSB - 1
LSB
t
6
t
5
t
4
t
3
t
2
t
1
SCK
SS:EECS
Figure 5. MISO Read Timing in SPI Slave Mode
MISO
SCLK
MSB
MSB - 1
LSB
t
10
t
9
t
8
t
7
SSI
SS:EECS
SCK
CS5378
DS639F1
15
SWITCHING CHARACTERISTICS
Serial Data Interface Timing
Parameter
Symbol Min Typ
Max
Unit
DRDY Falling Edge to SCK Rising
t
1
60
-
-
ns
SCK Falling to New Data Bit
t
2
-
-
120
ns
SCK High Time
t
3
120
-
-
ns
SCK Low Time
t
4
120
-
-
ns
Final SCK Falling to DRDY Rising
t
5
60
-
-
ns
Figure 6. Serial Data Read Timing
MISO
SCK
t
3
DRDY
t
4
t
2
t
1
t
5

CS5378
DS639F1
16
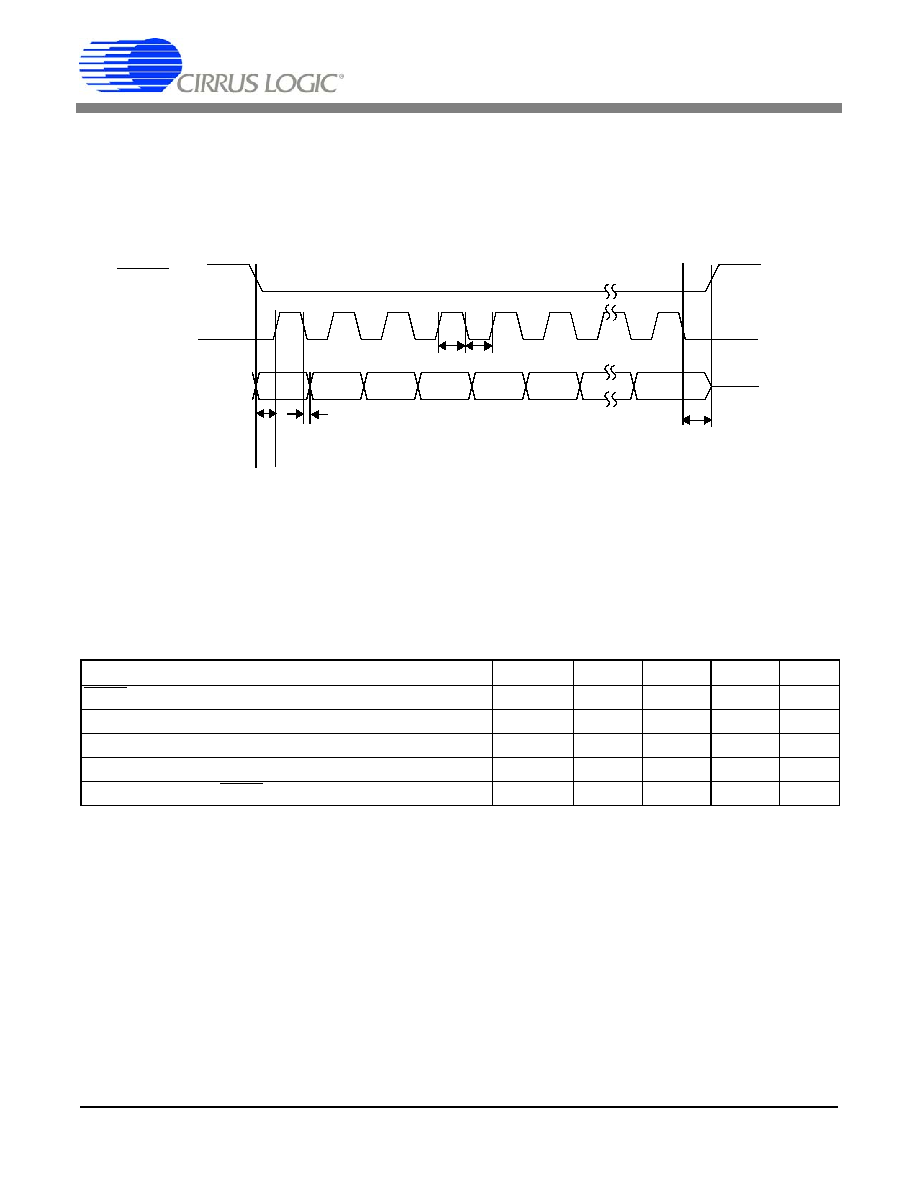
SWITCHING CHARACTERISTICS
CLK, SYNC, MCLK, MSYNC, and MDATA
Notes: 3. PLL bypass mode. The PLL generates a 32.768 MHz master clock when enabled.
4. Sampling synchronization between multiple CS5378 devices receiving identical SYNC signals.
Parameter
Symbol Min Typ
Max
Unit
Master Clock Frequency
(Note 3)
CLK
32
32.768
33
MHz
Master Clock Duty Cycle
DTY
40
-
60
%
Master Clock Rise Time
t
RISE
-
-
20
ns
Master Clock Fall Time
t
FALL
-
-
20
ns
Master Clock Jitter
JTR
-
-
300
ps
Synchronization after SYNC rising
(Note 4)
SYNC
-2
-
2
�s
MSYNC Setup Time to MCLK rising
t
mss
20
-
-
ns
MCLK rising to Valid MDATA
t
mdv
-
-
75
ns
MSYNC falling to MCLK rising
t
msf
20
-
-
ns
MSYNC
MCLK
MDATA
Figure 7. SYNC, MCLK, MSYNC, MDATA Interface Timing
t
msd
t
msd
t
msh
Data1
Data2
SYNC
f
MCLK
2.048 MHz
1.024 MHz
t
msd
= T
MCLK
/ 4
t
msd
= 122 ns
t
msd
= 244 ns
t
msh
= T
MCLK
t
msh
= 488 ns
t
msh
= 976 ns
Note: SYNC input latched on MCLK rising edge. MSYNC output triggered by MCLK falling edge.
CS5378
DS639F1
17
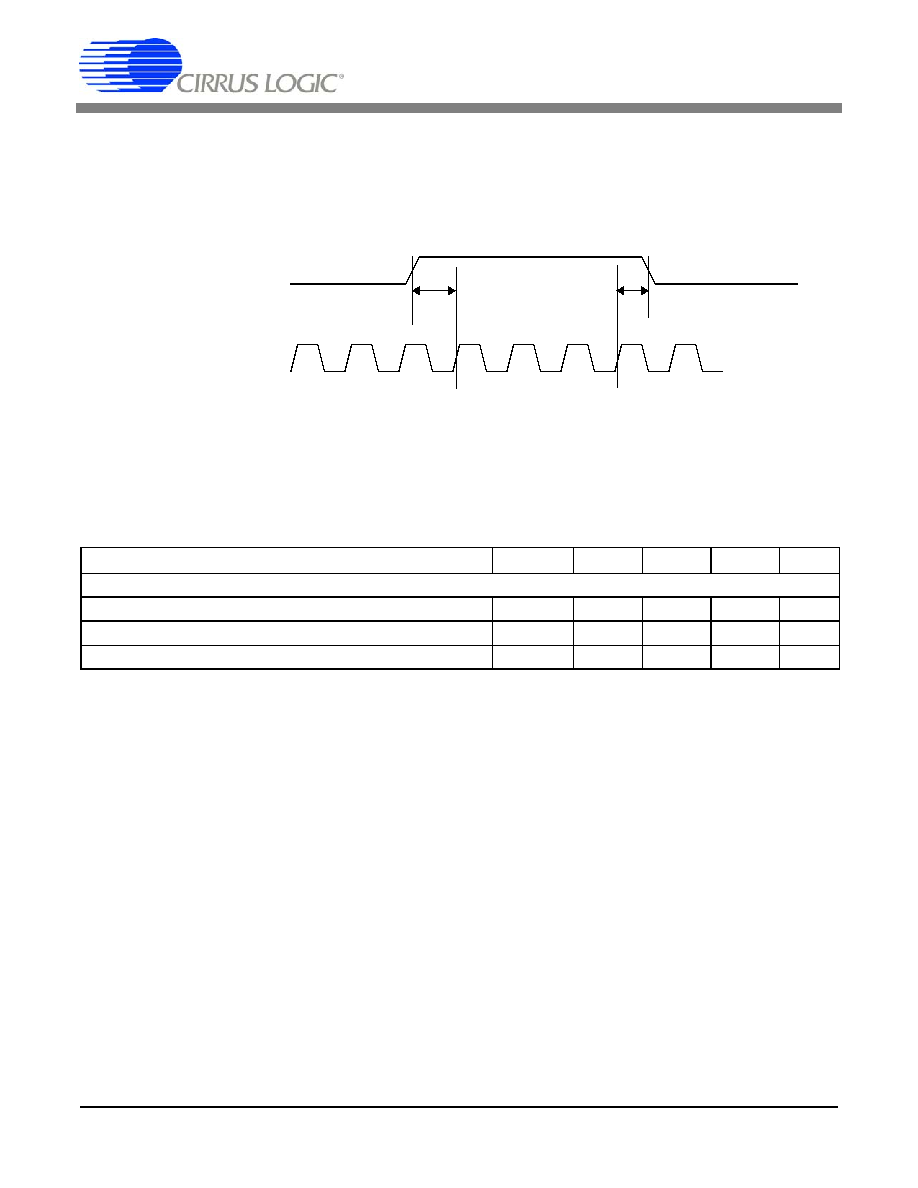
SWITCHING CHARACTERISTICS
Test Bit Stream (TBS)
5. TBSDATA can be delayed from 0 to 63 full bit periods. The timing diagram shows no TBSDATA delay.
Parameter
Symbol Min Typ
Max
Unit
TBS Data Output Timing
TBS Data Bit Rate
-
256
-
kbps
TBS Data Rising to MCLK Rising Setup Time
t
1
60
-
-
ns
MCLK Rising to TBS Data Falling Hold Time
(Note 5)
t
2
60
-
-
ns
Figure 8. TBS Output Data Timing
TBSDATA
MCLK
t
2
t
1
Note: Example timing shown for a 256 kHz output rate and no programmable delays.
CS5378
DS639F1
18
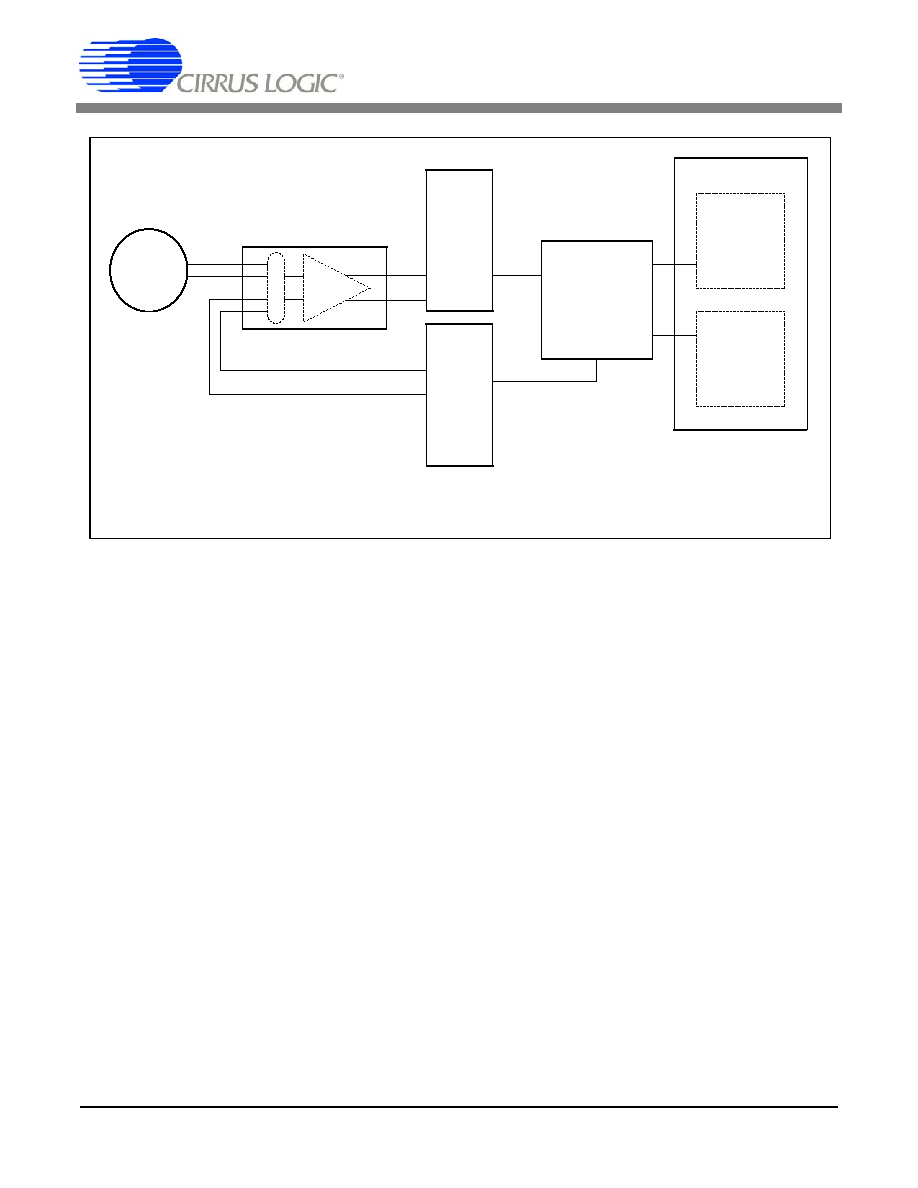
3. SYSTEM DESIGN WITH CS5378
Figure 9 illustrates a simplified block diagram of
the CS5378 in a single channel measurement sys-
tem.
A differential sensor is connected through the
CS3301/02 differential amplifiers to the CS5371
modulator, where analog to digital conversion
occurs. The modulator's 1-bit output connects to
the CS5378 MDATA input, where the oversam-
pled
data is decimated and filtered to 24-bit out-
put samples at a programmed output rate. These
output samples are buffered into an 8-deep data
FIFO and then passed to the system telemetry.
System self tests are performed by connecting the
CS5378 test bit stream (TBS) generator to the
CS4373 test DAC. Analog tests drive differential
signals from the CS4373 test DAC into the multi-
plexed inputs of the CS3301/02 amplifiers or di-
rectly to the differential sensor. Digital loopback
tests internally connect the TBS digital output di-
rectly to the CS5378 modulator input.
3.1 Power Supplies
The system shown in Figure 9 typically operates
from a
�
2.5 V or a 5 V analog power supply and a
3.3 V digital power supply. The CS5378 logic core
can be powered from 2.5 V to minimize power con-
sumption, if required.
3.2 Reset Control
System reset is required only for the CS5378 de-
vice, and is a standard active low signal that can be
generated by a power supply monitor or microcon-
troller. Other system devices default to a power-
down state when the CS5378 is reset.
3.3 PLL and Clock Generation
A PLL is included on the CS5378 to generate an in-
ternal 32.768 MHz master clock from a
1.024 MHz, 2.048 MHz, or 4.096 MHz standard
clock or manchester encoded input. Clock inputs
for other system devices are driven by clock out-
puts from the CS5378.
Digital Filter
w/ PLL
AMP
Geophone
or
Hydrophone
Sensor
M
U
X
�Controller
or
Configuration
EEPROM
Communication
Interface
CS3301
CS3302
CS5378
System
Telemetry
Modulator
CS5371
Test DAC
CS4373
Figure 9. Single-Channel System Block Diagram

CS5378
DS639F1
19
3.4 Synchronization
Digital filter phase and analog sample timing of the
modulator connected to the CS5378 are syn-
chronized by a rising edge on the SYNC pin. If a
synchronization signal is received identically by all
CS5378 devices in a measurement network, syn-
chronous sampling across the network is guaran-
teed.
3.5 System Configuration
Through the serial configuration interface, filter
coefficients and digital filter register settings can
either be programmed by a microcontroller or auto-
matically loaded from an external EEPROM after
reset. System configuration is only required for the
CS5378 device, as other devices are configured via
the CS5378 General Purpose I/O pins.
Two registers in the digital filter, SYSTEM1 and
SYSTEM2 (0x2C, 0x2D), are provided for user de-
fined system information. These are general pur-
pose registers that will hold any 24-bit data values
written to them.
3.6 Digital Filter Operation
After analog to digital conversion occurs in the
modulator, the oversampled 1-bit
data is read
into the CS5378 through the MDATA pin. The dig-
ital filter then processes data through the enabled
filter stages, decimating it to 24-bit words at a pro-
grammed output word rate. The final 24-bit sam-
ples are concatenated with 8-bit status words and
placed into an output FIFO.
3.7 Data Collection
Data is collected from the CS5378 through the se-
rial data interface. When data is available, serial
transactions are automatically initiated to transfer
24-bit data or 32-bit status+data from the output
FIFO to the system telemetry. The output FIFO has
eight data locations to permit latency in data collec-
tion.
3.8 Integrated peripherals
Test Bit Stream (TBS)
A digital signal generator built into the CS5378
produces a 1-bit
sine wave or impulse function.
This digital test bit stream is connected to the
CS4373 test DAC to create high quality analog test
signals or internally looped back to the CS5378
MDATA input to test the digital filter and data col-
lection circuitry.
Time Break
Timing information is recorded during data collec-
tion by strobing the TIMEB pin. A dedicated flag
in the sample status bits, TB, is set high to indicate
during which measurement the timing event oc-
curred.
General Purpose I/O (GPIO)
Eight general purpose pins are available on the
CS5378 for system control. Each pin can be set as
input or output, high or low, with an internal pull-
up enabled or disabled. The CS3301/02, CS5371
and CS4373 devices in Figure 9 are configured by
simple pin settings controlled through the CS5378
GPIO pins.
CS5378
DS639F1
20
4. POWER SUPPLIES
The CS5378 has three sets of power supply inputs.
One set supplies power to the I/O pins of the device
(VDDPAD), another supplies power to the logic
core (VDDCORE) and the third supplies power to
the PLL (VDDPLL). The I/O pin power supplies
determine the maximum input and output voltages
when interfacing to peripherals, the logic core pow-
er supply largely determines the power consump-
tion of the CS5378 and the PLL power supply
powers the internal PLL circuitry.
4.1 Pin Descriptions
VDDPAD, GNDPAD - Pins 9, 10
Sets the interface voltage to a microcontroller, sys-
tem telemetry, modulator, and test DAC. VDD-
PAD can be driven with voltages from 3.3 V to
5 V.
VDDPLL, GNDPLL - Pins 15, 16
Sets the operational voltage of the internal CS5378
PLL circuitry. Can be driven with voltages from
3.3 V to 5 V.
VDDCORE, GNDCORE - Pins 21, 22
Sets the operational voltage of the CS5378 logic
core. VDDCORE can be driven with voltages from
2.5 V to 5 V. A 2.5 V supply will minimize total
power consumption.
4.2 Bypass Capacitors
Each power supply pin should be bypassed with
parallel 1
�F and 0.01 �F caps, or by a single
0.1
�F cap, placed as close as possible to the
CS5378. Bypass capacitors should be ceramic
(X7R, C0G), tantalum, or other good quality di-
electric type.
4.3 Power Consumption
Power consumption of the CS5378 depends prima-
rily on the power supply voltage of the logic core
(VDDCORE) and the programmed digital filter
clock rate. Digital filter clock rates are selected
based on the required output word rate as explained
in "Digital Filter Initialization" on page 38.
1
2
3
4
5
6
7
8
2 1
2 2
2 3
2 4
2 5
2 6
2 7
2 8
9
1 0
1 1
1 2
1 7
1 8
1 9
2 0
1 3
1 4
1 5
1 6
VDDPAD
GNDPAD
GNDCORE
VDDCORE
Figure 10. Power Supply Block Diagram
GNDPLL
VDDPLL

CS5378
DS639F1
21
5. RESET CONTROL
The CS5378 reset signal is active low. When re-
leased, a series of self-tests are performed and the
device either actively boots from an external EE-
PROM or enters an idle state waiting for microcon-
troller configuration.
5.1 Pin Descriptions
RESET - Pin 18
Reset input, active low.
GPIO7:BOOT - Pin 28
Boot mode select, latched immediately following
reset. Weak (~100 k
) internal pull-up defaults
high, external 10 k
pull-down required to set low.
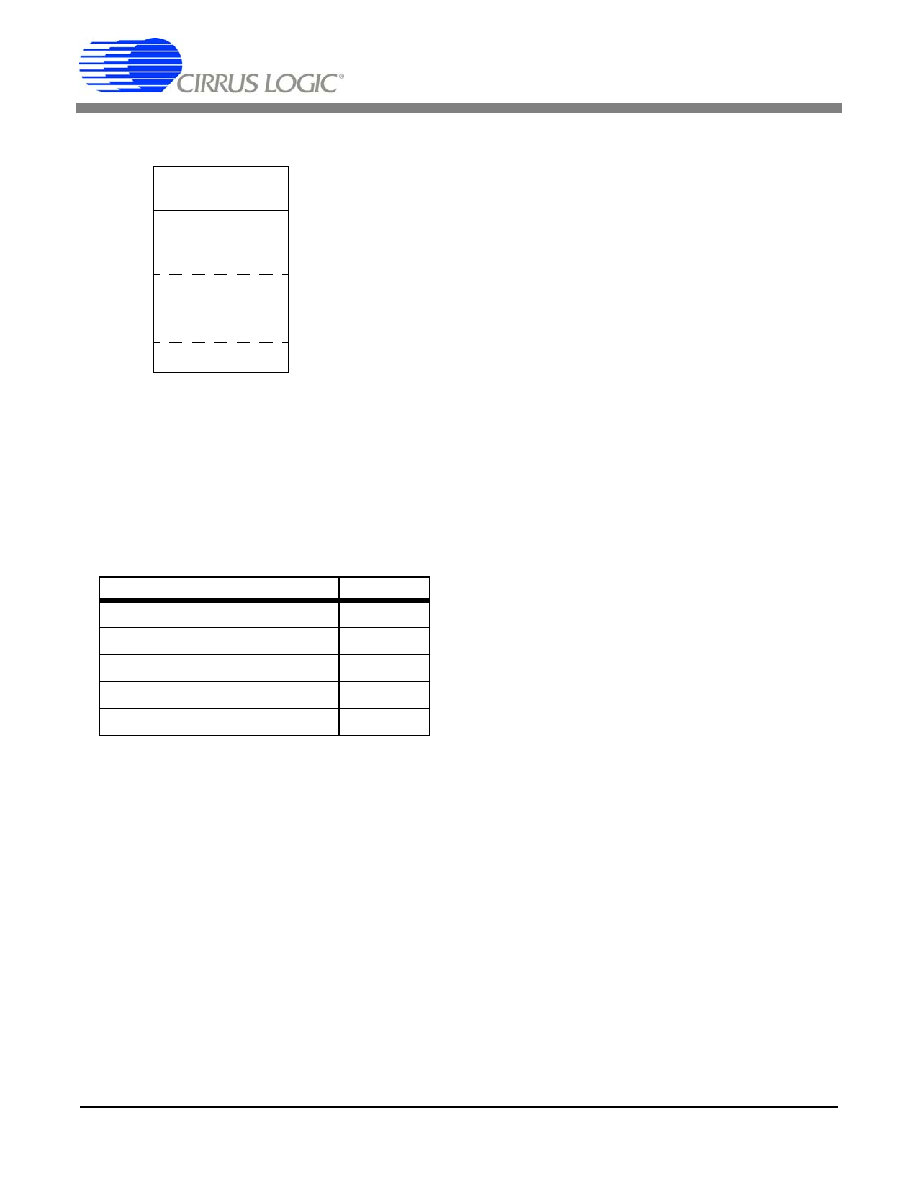
5.2 Reset Self-Tests
After RESET is released but before booting, a se-
ries of digital filter self-tests are run. Results are
combined into the SELFTEST register (0x2F),
with 0x0AAAAA indicating all passed. Self-tests
require 60 ms to complete.
5.3 Boot Configurations
The logic state of the BOOT pin after reset deter-
mines if the CS5378 actively reads configuration
information from EEPROM or enters an idle state
waiting for a microcontroller to write configuration
commands.
EEPROM Boot
When the BOOT pin is high after reset, the CS5378
actively reads data from an external serial EE-
PROM and then begins operation in the specified
configuration. Configuration commands and data
are encoded in the EEPROM as specified in the
`Configuration By EEPROM' section of this data
sheet, starting on page 25.
Microcontroller Boot
When the BOOT pin is low after reset, the CS5378
enters an idle state waiting for a microcontroller to
write configuration commands and initialize filter
operation. Configuration commands and data are
written as specified in the `Configuration By Mi-
crocontroller' section of this data sheet, starting on
page 30.
RESET
Self-Tests
SELFTEST
Register
BOOT
Pin
EEPROM
Boot
�Controller
Boot
1
0
Figure 11. Reset Control Block Diagram
BOOT
Reset Mode
1
EEPROM boot
0
Microcontroller boot
Self-Test
Type
Pass
Code
Fail
Code
Program ROM
0x00000A
0x00000F
Data ROM
0x0000A0
0x0000F0
Program RAM
0x000A00
0x000F00
Data RAM
0x00A000
0x00F000
Execution Unit
0x0A0000
0x0F0000
CS5378
DS639F1
22
6. PLL AND CLOCK GENERATION
The CS5378 requires a 32.768 MHz master clock,
which can be supplied directly or from an internal
phase locked loop. This master clock is used to
generate an internal digital filter clock and an exter-
nal modulator clock.
The internal PLL will lock to standard clock or
manchester encoded input signals. The input type
and input frequency are selected by the reset state
of the PLL mode select pins.
6.1 Pin Descriptions
CLK - Pin 17
Clock or PLL input, standard clock or manchester.
GPIO[4:6]:PLL[0:2] - Pins 5, 6, 7
PLL mode select, latched immediately after reset.
Weak (~100 k
) internal pull-ups default high, ex-
ternal 10 k
pull-downs required to set low.
6.2 PLL Mode Select
The CS5378 PLL operational mode and frequency
are selected immediately after reset based on the
state of the PLL[0:2] pins. On the rising edge of the
reset signal, the digital high or low state of the
PLL[0:2] pins is latched and used to program the
clock input type and frequency.
A weak internal pull-up resistor (~100 k
) will
hold the PLL mode select pins high by default. To
force the pin low on reset, an external 10 k
pull-
down resistor should be connected. Once the pin
state is latched following reset, the GPIO[4:6] pins
funtion without affecting PLL operation.
6.3 Synchronous Clocking
To guarantee synchronous measurements through-
out a sensor network, a system clock should be dis-
tributed to arrive at all nodes in phase. The
distributed system clock can either be the full
32.768 MHz master clock, or the CS5378 PLL can
create a synchronous 32.768 MHz clock from a
slower clock. To ensure the generated clock re-
mains synchronous with the network, the CS5378
PLL uses a phase/frequency detector architecture.
PLL
CLK
DSPCFG Register
MCLK
Internal
Clocks
Figure 12. Clock Generation Block Diagram
Clock Divider
Generator
and MCLK
Output
PLL[2:0]
32.768
MHz
PLL[2:0]
PLL Mode
111
32.768 MHz clock input (PLL bypass).
110
1.024 MHz clock input.
101
2.048 MHz clock input.
100
4.096 MHz clock input.
011
32.768 MHz clock input (PLL bypass).
010
1.024 MHz manchester input.
001
2.048 MHz manchester input.
000
4.096 MHz manchester input.
Table 5. PLL Mode Selections

CS5378
DS639F1
23
6.4 Master Clock Jitter and Skew
Care must be taken to minimize jitter and skew on
the distributed system clock as both parameters af-
fect measurement performance.
Jitter on the input clock causes jitter in the generat-
ed modulator clock, resulting in sample timing er-
rors and increased noise.
Skew between input clocks from node to node cre-
ates a sample timing offset, resulting in systematic
measurement errors in a reconstructed signal.
CS5378
DS639F1
24
7. SYNCHRONIZATION
The CS5378 has a dedicated SYNC input that
aligns the internal digital filter phase and generates
an external signal for synchronizing modulator an-
alog sampling. By providing simultaneous rising
edges to the SYNC pins of multiple CS5378 devic-
es, synchronous sampling across a network can be
guaranteed.
7.1 Pin Description
SYNC - Pin 19
Synchronization input, rising edge triggered.
7.2 MSYNC Generation
The SYNC signal rising edge is used to generate a
retimed synchronization signal, MSYNC. The
MSYNC signal reinitializes internal digital filter
phase and is driven onto the MSYNC output pin to
phase align modulator analog sampling.
The MSEN bit in the digital filter CONFIG register
(0x00) enables MSYNC generation. See "Modula-
tor Interface" on page 36 for more information
about MSYNC.
7.3 Digital Filter Synchronization
The internal MSYNC signal resets the digital filter
state machine to establish a known digital filter
phase. Filter convolutions restart, and the next out-
put word is available one full sample period later.
Repetitive synchronization is supported when
SYNC events occur at exactly the selected output
rate. In this case, re-synchronization will occur at
the start of a convolution cycle when the digital fil-
ter state machine is already reset.
7.4 Modulator Synchronization
The external MSYNC signal phase aligns modula-
tor analog sampling when connected to the CS5371
MSYNC input. This ensures synchronous analog
sampling relative to MCLK.
Repetitive synchronization of the modulators is
supported when SYNC events occur at exactly the
selected output rate. In this case, re-synchroniza-
tion always occurs at the start of analog sampling.
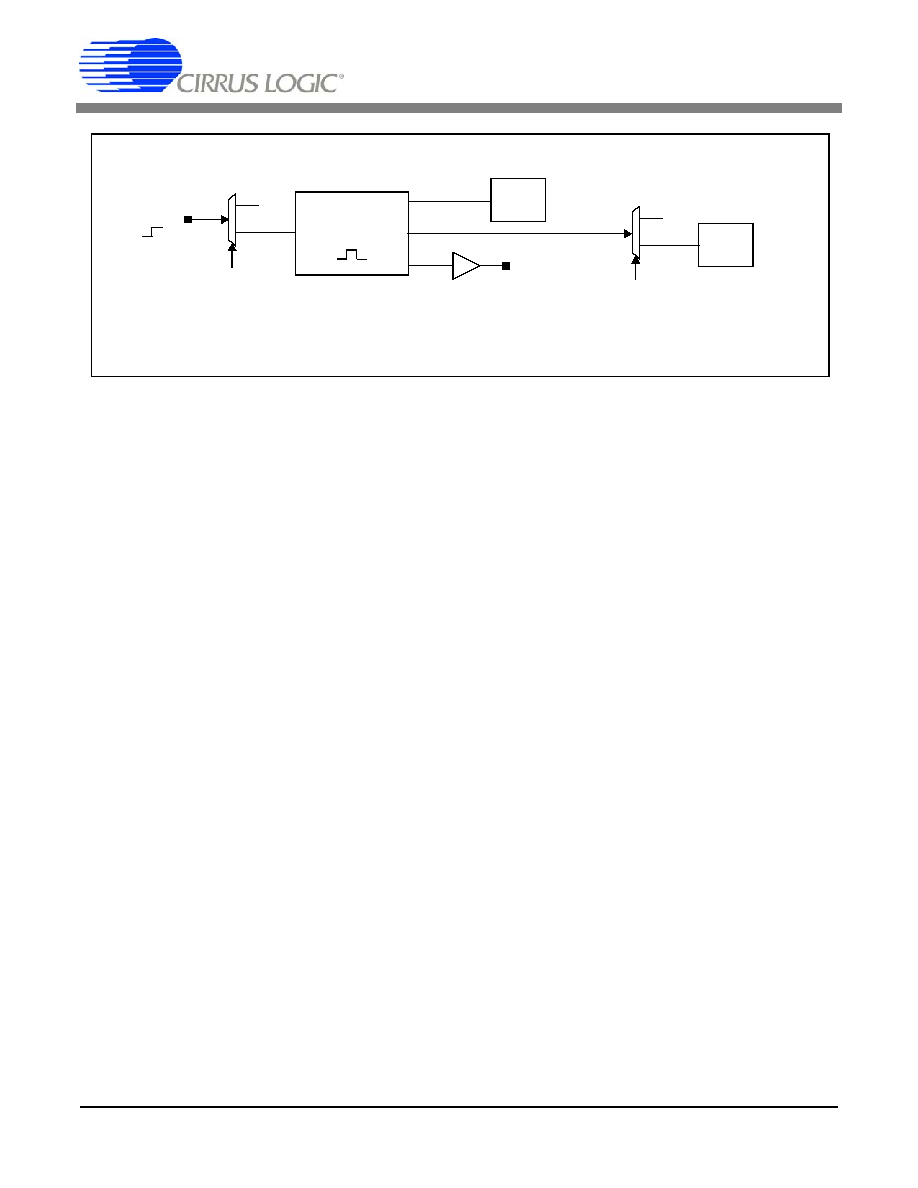
7.5 Test Bit Stream Synchronization
When the test bit stream generator is enabled, an
MSYNC signal can reset the internal data pointer.
This restarts the test bit stream from the first data
point to establish a known output signal phase.
The TSYNC bit in the digital filter TBSCFG regis-
ter (0x2A) enables synchronization of the test bit
stream by MSYNC. When TSYNC is disabled, the
test bit stream phase is not affected by MSYNC.
Figure 13. Synchronization Block Diagram
SYNC
MSYNC
Digital
Filter
Generator
MSYNC
0
1
MSEN
0
1
TSYNC
Test Bit
Stream
Output

CS5378
DS639F1
25
8. CONFIGURATION BY EEPROM
After reset, the CS5378 reads the state of the
GPIO7:BOOT pin to determine a source for con-
figuration commands. If BOOT is high, the
CS5378 initiates serial transactions to read config-
uration information from an external EEPROM.
8.1 Pin Descriptions
Pins required for EEPROM boot are listed here,
other serial pins are inactive.
SCK - Pin 24
Serial clock output, nominally 1.024 MHz.
MISO - Pin 25
Serial data input pin. Valid on rising edge of SCK,
transition on falling edge.
MOSI - Pin 26
Serial data output pin. Valid on rising edge of
SCK, transition on falling edge.
SS:EECS - Pin 27
EEPROM chip select output, active low.
8.2 EEPROM Hardware Interface
When booting from EEPROM the CS5378 actively
performs serial transactions, as shown in Figure 15,
to read configuration commands and data. 8-bit
SPI opcodes and 16-bit addresses are combined to
read back 8-bit configuration commands and 24-bit
configuration data.
System design should include a connection to the
configuration EEPROM for in-circuit reprogram-
ming. The CS5378 serial pins tri-state when inac-
tive to support external connections to the serial
bus.
8.3 EEPROM Organization
The boot EEPROM holds the 8-bit commands and
24-bit data required to initialize the CS5378 into an
operational state. Configuration information starts
at memory location 0x10, with addresses 0x00 to
0x0F free for use as manufacturing header informa-
tion.
The first serial transaction reads a 1-byte command
from memory location 0x10 and then, depending
on the command type, reads multiple 3-byte data
words to complete the command. Command and
data reads continue until the `Filter Start' command
is recognized.
SS:EECS
SCK
MISO
MOSI
CS5378
AT25640
CS
SCK
SI
SO
27
24
25
26
1
6
2
5
VD
GND
WP VCC HOLD
3
8
7
4
Figure 14. EEPROM Configuration Block Diagram

CS5378
DS639F1
26
SCK
MOSI
SS:EECS
MSB
LSB
MISO
X
6
1
2
3
4
5
MSB
LSB
6
1
2
3
4
5
1
8
2
7
6
5
4
3
Cycle
MOSI
MISO
0x03
ADDR
DATA1
DATA3
DATA2
SS:EECS
READ
1 BYTE / 3 BYTE
ADDR
CMD
ADDR
DATA
2 BYTE
Figure 15. EEPROM Serial Read Transactions
Serial Read from EEPROM
Instruction
Opcode
Address
Definition
Read
0x03
ADDR[15:0]
Read data beginning at the address given in ADDR.
CS5378
DS639F1
27
The maximum number of bytes that will be written
for a single configuration is less than 2 KByte
(16 Kbit), including command overhead:
Supported serial configuration EEPROMs are
SPI mode 0 (0,0) compatible, 16-bit addresses, 8-
bit data, larger than 2 KByte (16 KBit). ATMEL
AT25640, AT25128, or similar serial EEPROMs
are recommended.
8.4 EEPROM Configuration Commands
A summary of available EEPROM commands is
shown in Table 7.
Write DF Register - 0x01
This EEPROM command writes a data value to the
specified digital filter register. Digital filter regis-
ters control hardware peripherals and filtering
functions. See "Digital Filter Registers" on page 71
for the bit definitions of the digital filter registers.
Sample Command:
Write digital filter register 0x00 with data value
0x060431. Then write 0x20 with data 0x000240.
01 00 00 00 06 04 31
01 00 00 20 00 02 40
Write FIR Coefficients - 0x02
This EEPROM command writes custom coeffi-
cients for the FIR1 and FIR2 filters. The first two
data words set the number of FIR1 and FIR2 coef-
ficients to be written. The remaining data words are
the concatenated FIR1 and FIR2 coefficients.
A maximum of 255 coefficients can be written for
each FIR filter, though the available digital filter
computation cycles will limit their practical size.
See "FIR Filter" on page 44 for more information
about FIR filter coefficients.
Sample Command:
Write FIR1 coefficients 0x00022E, 0x000771 then
FIR2 coefficients 0xFFFFB9, 0xFFFE8D.
02 00 00 02 00 00 02
00 02 2E 00 07 71 FF FF B9 FF FE 8D
Write IIR Coefficients - 0x03
This EEPROM command writes custom coeffi-
cients for the two stage IIR filter. The IIR architec-
ture and number of coefficients is fixed, so eight
data words containing coefficient values always
immediately follow the command byte. The IIR co-
efficient write order is: a11, b10, b11, a21, a22,
b20, b21, and b22. See "IIR Filter" on page 52 for
more information about IIR filter coefficients.
Figure 16. 8 Kbyte EEPROM Memory Organization
0000h
1FFFh
EEPROM
Manufacturing
Information
EEPROM
Command and
Data Values
Mfg Header
8-bit Command
0010h
N x 24-bit Data
8-bit Command
N x 24-bit Data
. . .
Table 6. Maximum EEPROM Configuration
Memory Requirement
Bytes
Digital Filter Registers (12)
84
FIR Coefficients (255+255)
1537
IIR Coefficients (3+5)
25
`Filter Start' Command
1
Total Bytes
1647

CS5378
DS639F1
28
Sample Command:
Write IIR1 coefficients 0x84BC9D, 0x7DA1B1,
0x825E4F, and IIR2 coefficients 0x83694F,
0x3CAD5F, 0x3E5104, 0x835DF8, 0x3E5104.
03
84 BC 9D 7D A1 B1 82 5E 4F 83 69 4F
3C AD 5F 3E 51 04 83 5D F8 3E 51 04
Write ROM Coefficients - 0x04
This EEPROM command selects the on-chip coef-
ficients for the FIR1, FIR2, IIR 1st order, and IIR
2nd order filters for use by the digital filter. One
data word is required to select which internal coef-
ficient sets to use. See "Filter Coefficient Selec-
tion" on page 38 for information about selecting
on-chip FIR and IIR coefficient sets.
Sample Command:
Select IIR1 and IIR2 3 Hz @ 500 SPS low-cut co-
efficients, with FIR1 and FIR2 linear phase high-
cut coefficients. Data word 0x002200.
04 00 22 00
Filter Start - 0x07
This EEPROM command initializes and starts the
digital filter. Measurement data becomes available
one full sample period after this command is is-
sued. No data words are required for this EE-
PROM command.
Sample Command:
07
Table 7. EEPROM Boot Configuration Commands
(DATA) indicates multiple words of this type are to be written.
Name
CMD
8-bit
DATA
24-bit
Description
NOP
00
-
No Operation
WRITE DF REGISTER
01
REG
DATA
Write Digital Filter Register
WRITE FIR COEFFICIENTS
02
NUM FIR1
NUM FIR2
(FIR COEF)
Write Custom FIR Coefficients
WRITE IIR COEFFICIENTS
03
a11
b10
b11
a21
a22
b20
b21
b22
Write Custom IIR Coefficients
WRITE ROM COEFFICIENTS
04
COEF SEL
Use On-Chip Coefficients
NOP
05
-
No Operation
NOP
06
-
No Operation
FILTER START
07
-
Start Digital Filter Operation

CS5378
DS639F1
29
8.5 Example EEPROM Configuration
Table 8 shows an example EEPROM file for a min-
imal CS5378 configuration.
Table 8. Example EEPROM File
Addr
Data
Description
00
00
Mfg header
01
00
02
00
03
00
04
00
05
00
06
00
07
00
08
00
09
00
0A
00
0B
00
0C
00
0D
00
0E
00
0F
00
10
04
Write ROM Coefficients
11
00
12
22
13
00
14
01
Write CONFIG Register
15
00
16
00
17
00
18
06
19
04
1A
31
1B
01
Write FILTCFG Register
1C
00
1D
00
1E
20
1F
00
Addr
Data
Description
21
02
22
40
23
01
Write TBSCFG Register
24
00
25
00
26
2A
27
07
28
40
29
40
2A
01
Write TBSGAIN Register
2B
00
2C
00
2D
2B
2E
04
2F
B0
30
00
31
07
Filter Start

CS5378
DS639F1
30
9. CONFIGURATION BY MICROCONTROLLER
After reset, the CS5378 reads the state of the
GPIO7:BOOT pin to determine a source for con-
figuration commands. If BOOT is low, the CS5378
receives configuration commands from a micro-
controller.
9.1 Pin Descriptions
Pins required for microcontroller boot are listed
here, other serial pins are inactive.
SS:EECS - Pin 27
Slave select input pin, active low. Serial chip select
input from a microcontroller.
MOSI - Pin 26
Serial data input pin. Valid on rising edge of SCK,
transition on falling edge.
MISO - Pin 25
Serial data output pin. Valid on rising edge of
SCK, transition on falling edge. Open drain output
requiring a 10 k
pull-up resistor.
SCK - Pin 24
Serial clock input pin. Serial clock input from mi-
crocontroller, maximum 4.096 MHz.
9.2 Microcontroller Hardware Interface
When booting from a microcontroller the CS5378
receives configuration commands and configura-
tion data through serial transactions, as shown in
Figure 18. 8-bit SPI opcodes and 8-bit addresses
are combined to read and write 24-bit configuration
commands and data.
Microcontroller serial transactions require toggling
the SS:EECS pin as the CS5378 chip select and
writing a serial clock to the SCK input. Serial data
is input to the CS5378 on the MOSI pin, and output
on the MISO pin.
9.3 Microcontroller Serial Transactions
Microcontroller configuration commands are writ-
ten to the digital filter through SPI registers. A 24-
bit command and two 24-bit data words can be
written to the SPI registers in any single serial
transaction. Some commands require additional
data words through additional serial transactions to
complete.
9.3.1 SPI opcodes
A microcontroller communicates with the CS5378
serial port using standard 8-bit SPI opcodes and an
8-bit address. The standard SPI `Read' and `Write'
opcodes are listed in Figure 18.
SCK
MISO
MOSI
Pin Logic
SPI
Figure 17. Serial Interface Block Diagram
Command
SS:EECS
Registers
Digital Filter
Interpreter
Serial

CS5378
DS639F1
31
SCK
MOSI
Figure 18. Microcontroller Serial Transactions
SS:EECS
MSB
LSB
MISO
X
6
1
2
3
4
5
MSB
LSB
6
1
2
3
4
5
1
8
2
7
6
5
4
3
Cycle
MISO
0x02
ADDR
Data1
MOSI
MISO
MOSI
Microcontroller Write to SPI Registers
Microcontroller Read from SPI Registers
DataN
Data2
SS:EECS
SS:EECS
0x03
ADDR
Data1
DataN
Data2
Instruction
Opcode
Address
Definition
Write
0x02
ADDR[7:0]
Write SPI registers beginning at the address in ADDR.
Read
0x03
ADDR[7:0]
Read SPI registers beginning at the address in ADDR.

CS5378
DS639F1
32
9.3.2 SPI registers
The SPI registers are shown in Figure 19 and are
24-bit registers mapped into an 8-bit register space
as high, mid, and low bytes. See "SPI Registers" on
page 66 for the bit definitions of the SPI registers.
9.3.3 Serial transactions
A serial transaction to the SPI registers starts with
an SPI opcode, followed by an address, and then
some number of data bytes written or read starting
at that address.
Typical serial write transactions require sending
groups of 5, 8, or 11 total bytes to the SPICMD or
SPIDAT1 registers:
5-byte write to SPICMD
02 03 12 34 56
5-byte write to SPIDAT1
02 06 12 34 56
8-byte write to SPICMD, SPIDAT1
02 03 12 34 56 AB CD EF
8-byte write to SPIDAT1, SPIDAT2
02 06 12 34 56 AB CD EF
11-byte write to SPICMD, SPIDAT1, SPIDAT2
02 03 12 34 56 AB CD EF 65 43 21
Typical serial read transactions require groups of 3
or 5 bytes, split between writing into MOSI and
reading from MISO.
3-byte read of mid-byte of SPICTRL
MOSI: 03 01 00
MISO: xx xx 12
5-byte read of SPIDAT1
MOSI: 03 06 00 00 00
MISO: xx xx 12 34 56
9.3.4 Multiple serial transactions
Some configuration commands require multiple se-
rial transactions to complete. There must be a
small delay between transactions for the CS5378 to
process the incoming data. Two methods can be
used to ensure the CS5378 is ready to receive the
next configuration command.
1) Delay a fixed 1 ms period to guarantee enough
time for the command to be completed.
2) Verify the status of the E2DREQ bit by reading
the SPICTRL register. When low, the CS5378 is
ready for the next command.
9.3.5 Polling E2DREQ
One transaction type that can always be performed
no matter the delay from the previous configuration
command is reading E2DREQ in the mid-byte of
the SPICTRL register. A 3-byte read transaction.
MOSI: 03 01 00
MISO: xx xx 01 <- E2DREQ bit high
MISO: xx xx 00 <- E2DREQ bit low
The E2DREQ bit reads high while a serial transac-
tion is being processed. When low, the digital filter
is ready to receive a new serial transaction.
Name
Addr.
Type
# Bits
Description
SPICTRL
00 - 02
R/W
8, 8, 8
SPI Control
SPICMD
03 - 05
R/W
8, 8, 8
SPI Command
SPIDAT1
06 - 08
R/W
8, 8, 8
SPI Data 1
SPIDAT2
09 - 0B
R/W
8, 8, 8
SPI Data 2
Figure 19. SPI Registers
CS5378
DS639F1
33
9.4 Microcontroller Configuration
Commands
A summary of available microcontroller configura-
tion commands is listed in Table 9.
Write DF Register - 0x01
This configuration command writes a specified
digital filter register. Digital filter registers control
hardware peripherals and filtering functions. See
"Digital Filter Registers" on page 71 for the bit def-
initions of the digital filter registers.
Sample Command:
Write digital filter register 0x00 with data value
0x060431. Then write 0x20 with data 0x000240.
02 03 00 00 01 00 00 00 06 04 31
Delay 1 ms or poll E2DREQ
02 03 00 00 01 00 00 20 00 02 40
Delay 1 ms or poll E2DREQ
Read DF Register - 0x02
This command reads a specified digital filter regis-
ter. The register value is requested in the first serial
transaction, with the register value copied to
SPIDAT1 and read in a subsequent serial transac-
tion.
Sample Command:
Read digital filter registers 0x00 and 0x20.
02 03 00 00 02 00 00 00
Delay 1 ms or poll E2DREQ
MOSI: 03 06 00 00 00
MISO: xx xx 06 04 31
02 03 00 00 02 00 00 20
Delay 1 ms or poll E2DREQ
MOSI: 03 06 00 00 00
MISO: xx xx 00 02 40
[DATA] indicates data word returned from digital filter.
(DATA) indicates multiple words of this type are to be written.
Name
CMD
24-bit
DAT1
24-bit
DAT2
24-bit
Description
NOP
000000
-
-
No Operation
WRITE DF REGISTER
000001
REG
DATA
Write Digital Filter Register
READ DF REGISTER
000002
REG
[DATA]
-
-
Read Digital Filter Register
WRITE FIR COEFFICIENTS
000003
NUM FIR1
(FIR COEF)
NUM FIR2
(FIR COEF)
Write Custom FIR Coefficients
WRITE IIR COEFFICIENTS
000004
a11
b11
a22
b21
b10
a21
b20
b22
Write Custom IIR Coefficients
WRITE ROM COEFFICIENTS
000005
COEF SEL
-
Use On-Chip Coefficients
NOP
000006
-
-
No Operation
NOP
000007
-
-
No Operation
FILTER START
000008
-
-
Start Digital Filter Operation
FILTER STOP
000009
-
-
Stop Digital Filter Operation
Table 9. Microcontroller Boot Configuration Commands

CS5378
DS639F1
34
Write FIR Coefficients - 0x03
This command writes custom coefficients for the
FIR1 and FIR2 filters. The first two data words set
the number of FIR1 and FIR2 coefficients to be
written. The remaining data words are the concate-
nated FIR1 and FIR2 coefficients.
A maximum of 255 coefficients can be written for
each FIR filter, though the available digital filter
computation cycles will limit their practical size.
See "FIR Filter" on page 44 for more information
about FIR filter coefficients.
Sample Command:
Write FIR1 coefficients 0x00022E, 0x000771 then
FIR2 coefficients 0xFFFFB9, 0xFFFE8D.
02 03 00 00 03 00 00 02 00 00 02
Delay 1 ms or poll E2DREQ
02 06 00 02 2E 00 07 71
Delay 1 ms or poll E2DREQ
02 06 FF FF B9 FF FE 8D
Delay 1 ms or poll E2DREQ
Write IIR Coefficients - 0x04
This command writes custom coefficients for the
two stage IIR filter. The IIR architecture and num-
ber of coefficients is fixed, so eight coefficient val-
ues immediately follow this command. The IIR
coefficient write order is: a11, b10, b11, a21, a22,
b20, b21, and b22. See "IIR Filter" on page 52 for
more information about IIR filter coefficients.
Sample Command:
Write IIR1 coefficients 0x84BC9D, 0x7DA1B1,
0x825E4F, and IIR2 coefficients 0x83694F,
0x3CAD5F, 0x3E5104, 0x835DF8, 0x3E5104.
02 03 00 00 04 84 BC 9D 7D A1 B1
Delay 1 ms or poll E2DREQ
02 06 82 5E 4F 83 69 4F
Delay 1 ms or poll E2DREQ
02 06 3C AD 5F 3E 51 04
Delay 1 ms or poll E2DREQ
02 06 83 5D F8 3E 51 04
Delay 1 ms or poll E2DREQ
Write ROM Coefficients - 0x05
This configuration command selects the on-chip
coefficients for FIR1, FIR2, IIR 1st order, and IIR
2nd order filters for use by the digital filter. One
data word is required to select which internal coef-
ficient sets to use. See "Filter Coefficient Selec-
tion" on page 38 for information about selecting
on-chip FIR and IIR coefficient sets.
Sample Command:
Select IIR1 and IIR2 3 Hz @ 500 SPS low-cut co-
efficients, with FIR1 and FIR2 linear phase high-
cut coefficients. Data word 0x002200.
02 03 00 00 05 00 22 00
Delay 1 ms or poll E2DREQ
Filter Start - 0x08
This command initializes and starts the digital fil-
ter. Measurement data becomes available one full
sample period after this command is issued. No
data words are required for this command.
Sample Command:
02 03 00 00 08
Delay 1 ms or poll E2DREQ
Filter Stop - 0x09
This command disables the digital filter. Measure-
ment data output stops immediately after this com-
mand is issued. No data words are required for this
command.
Sample Command:
02 03 00 00 09
Delay 1 ms or poll E2DREQ
CS5378
DS639F1
35
9.5 Example Microcontroller Configuration
Table 10 shows an example microcontroller transactions for a minimal CS5378 configuration.
Table 10. Example Microcontroller Configuration
Transaction
SPI Data
Description
01
02 03 00 00 05 00 22 00
Write ROM coefficients
02
Delay 1ms or poll E2DREQ
03
02 03 00 00 01 00 00 00 06 04 31
Write CONFIG Register
04
Delay 1ms or poll E2DREQ
05
02 03 00 00 01 00 00 20 00 02 40
Write FILTCFG Register
06
Delay 1ms or poll E2DREQ
07
02 03 00 00 01 00 00 2A 07 40 40
Write TBSCFG Register
08
Delay 1ms or poll E2DREQ
09
02 03 00 00 01 00 00 2B 04 B0 00
Write TBSGAIN Register
10
Delay 1ms or poll E2DREQ
11
02 03 00 00 08
Filter Start
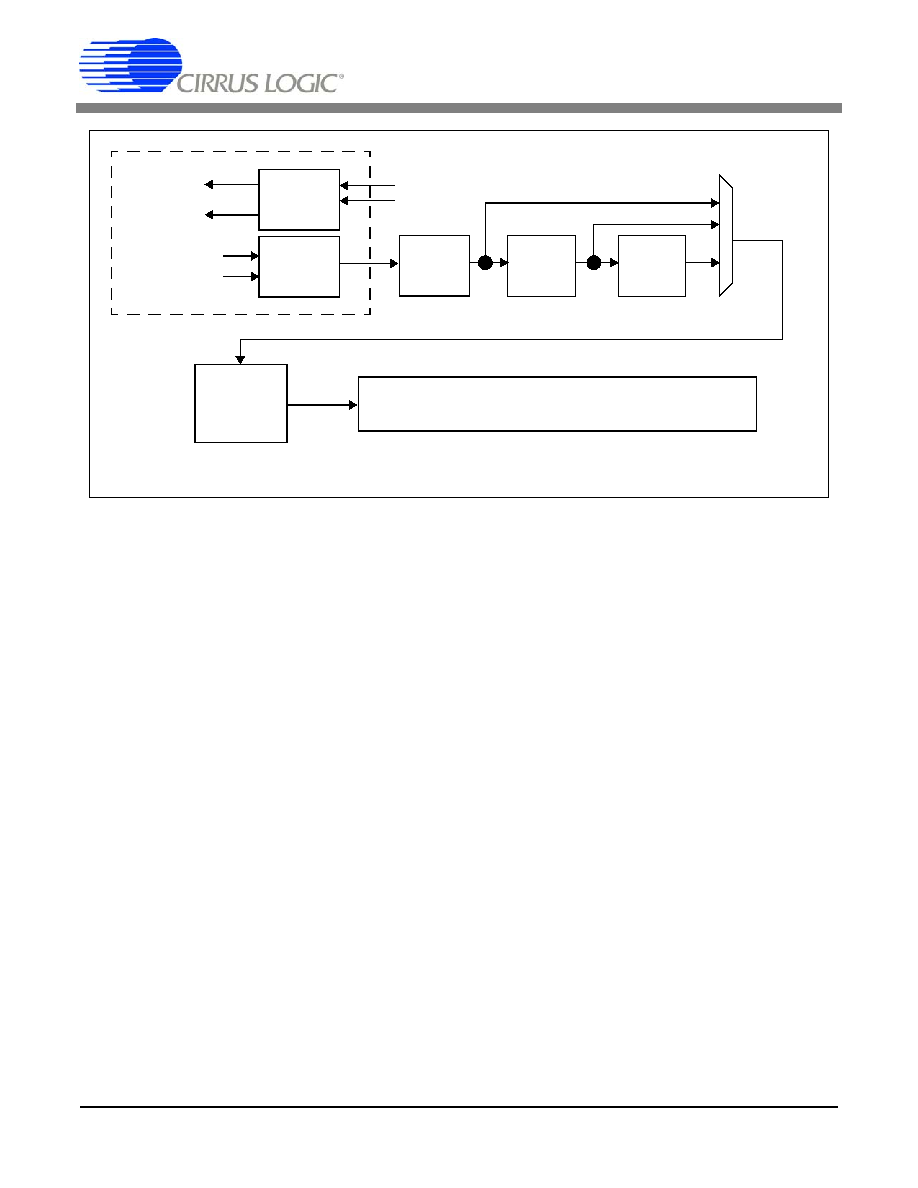
CS5378
DS639F1
36
10. MODULATOR INTERFACE
The CS5378 performs digital filtering for a
type
modulator. Signals from the
modulators are
connected through the modulator data interface
(MDI).
10.1 Pin Descriptions
MCLK - Pin 11
Modulator clock output. Nominally 2.048 MHz or
1.024 MHz.
MSYNC - Pin 12
Modulator synchronization signal output. Generat-
ed from the SYNC input.
MDATA - Pin 13
Modulator data input, nominally 512 kbit/s.
MFLAG - Pin 14
Modulator flag input. Driven high when the mod-
ulator is unstable due to an analog over-range con-
dition.
10.2 Modulator Clock Generation
The MCLK output is a low-jitter, low-skew modu-
lator clock generated from the 32.768 MHz master
clock.
MCLK typically operates at 2.048 MHz unless an-
alog low-power modes require a 1.024 MHz mod-
ulator clock.
The MCLK rate is selected and the MCLK output
is enabled by bits in the digital filter CONFIG reg-
ister (0x00). By default MCLK is disabled and
driven low.
10.3 Modulator Synchronization
The MSYNC output signal follows an input to the
SYNC pin. MSYNC phase aligns the modulator
sampling instant to guarantee synchronous analog
sampling across a measurement network.
MSYNC is enabled by a bit in the CONFIG register
(0x00). By default SYNC inputs do not cause an
MSYNC output.
Figure 20. Modulator Data Interface
FIR
IIR
Filters
Filter
Output to High Speed Serial Interface
DC Offset
Correction
Output Rate 4000 SPS ~ 1 SPS
& Gain
MDATA
MFLAG
MDI Input
512 kHz
MCLK /
Generate
MSYNC
CLK
SYNC
MSYNC
SINC
Filter
MCLK

CS5378
DS639F1
37
10.4 Modulator Data Input
The MDATA input expects 1-bit
data at a
512 kHz or 256 kHz rate. The input rate is selected
by a bit in the CONFIG register (0x00). By default,
MDATA is expected at 512 kHz.
The MDATA input one's density is designed for
full scale positive at 86% and full scale negative at
14%, with absolute maximum over-range capabili-
ty to 93% and 7%. These raw
inputs are deci-
mated and filtered by the digital filter to create 24-
bit samples at the output rate.
10.5 Modulator Flag Input
A high MFLAG input signal indicates the
mod-
ulator has become unstable due to an analog over-
range input signal. Once the over-range signal is
reduced, the modulator recovers stability and the
MFLAG signal is cleared.
The MFLAG input is mapped to a status bit in the
serial data output stream, and is associated with
each sample when written. See "Serial Data Inter-
face" on page 58 for more information on the
MFLAG error bit in the serial data status byte.

CS5378
DS639F1
38
11. DIGITAL FILTER INITIALIZATION
The CS5378 digital filter consists of three multi-
stage sections: a three stage SINC filter, a two stage
FIR filter, and a two stage IIR filter.
To initialize the digital filter, FIR and IIR coeffi-
cient sets are selected using configuration com-
mands, and the FILTCFG register (0x20) is written
to select the output filter stage, the output word
rate, and the number of enabled channels. The dig-
ital filter clock rate is then selected by writing the
CONFIG register (0x00).
11.1 Filter Coefficient Selection
Selection of SINC filter coefficients is not required
as they are selected automatically based on the pro-
grammed output word rate.
Digital filter FIR and IIR coefficients are selected
using the `Write FIR Coefficients' and `Write IIR
Coefficients', or the `Write ROM Coefficients'
configuration commands. When writing the FIR
and IIR coefficients from ROM, a data word selects
an on-chip coefficient set for each filter stage. Fig-
ure 22 shows the format of the coefficient selection
word, and the available coefficient sets for each se-
lection.
Characteristics of the on-chip digital filter coeffi-
cients are discussed in the `SINC Filter', `FIR Fil-
ter', and `IIR Filter' sections of this data sheet.
11.2 Filter Configuration Options
Digital filter parameters are selected by bits in the
FILTCFG register (0x20), and the digital filter
clock rate is selected by bits in the CONFIG regis-
ter (0x00).
11.2.1 Output Filter Stage
The digital filter can output data following any
stage in the filter chain. The output filter stage is
selected by the FSEL bits in the FILTCFG register.
Taking data from the SINC or FIR1 filter stages re-
duces the overall decimation of the filter chain and
increases the output rate, as discussed in the next
section. Taking data from FIR2, IIR1, IIR2, or IIR3
results in data at the selected rate.
Figure 21. Digital Filter Stages
SINC Filter
2 - 64000
FIR1
4
FIR2
2
IIR1
IIR2
1st Order
2nd Order
Output to High Speed Serial Data Interface
DC Offset
Correction
Output Rate 4000 SPS ~ 1 SPS
& Gain
Modulator
512 kHz
Input
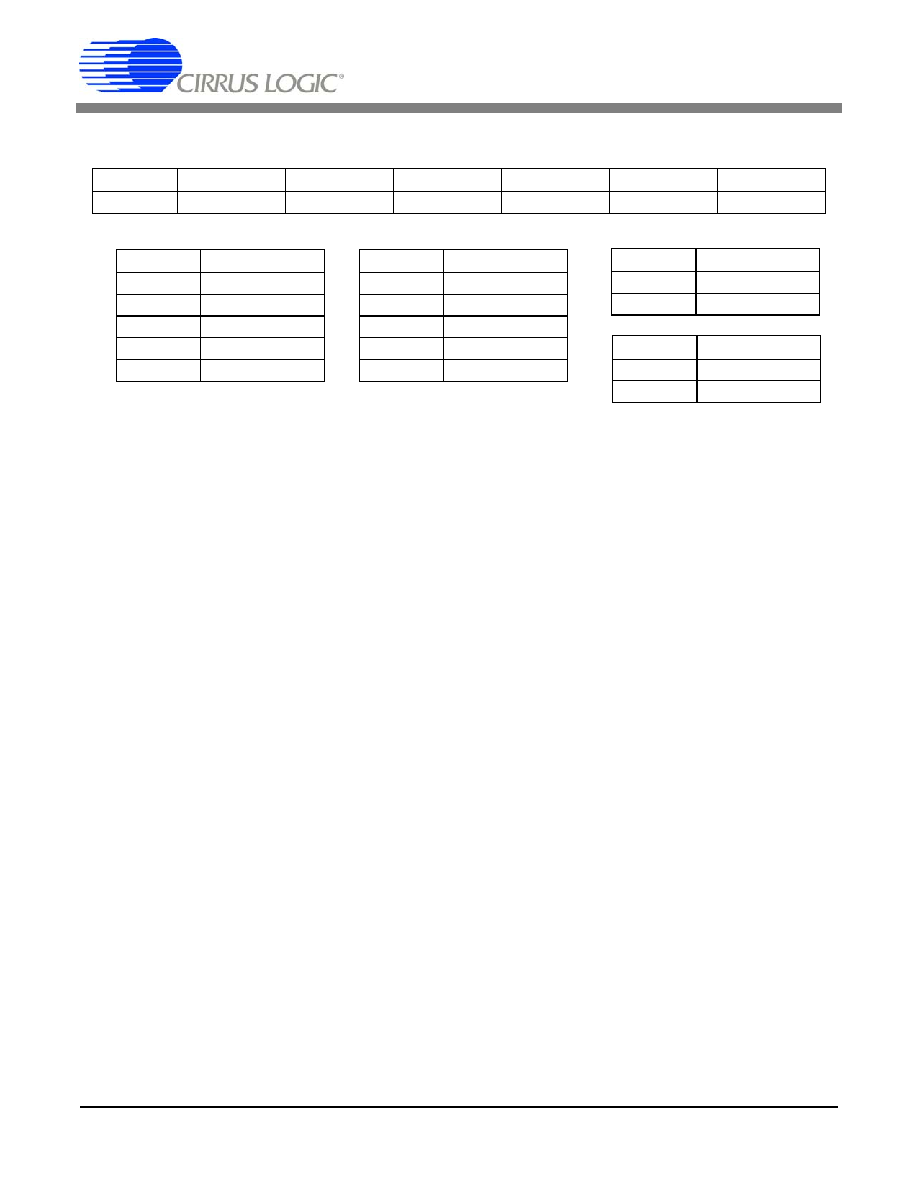
CS5378
DS639F1
39
11.2.2 Output Word Rate
The CS5378 digital filter supports output word
rates (OWRs) between 4000 SPS and 1 SPS. The
output word rate is selected by the DEC bits in the
FILTCFG register.
When taking data directly from the SINC filter, the
decimation of the FIR1 and FIR2 stages is by-
passed and the actual output word rate is multiplied
by a factor of eight compared with the register se-
lection. When taking data directly from FIR1, the
decimation of the FIR2 stage is bypassed and the
actual output word rate is multiplied by a factor of
two. Data taken from the FIR2, IIR1, IIR2, or IIR3
filtering stages is output at the selected rate.
11.2.3 Digital Filter Clock
The digital filter clock rate is programmable be-
tween 8.192 MHz and 32 kHz by bits in the CON-
FIG register.
Computation Cycles
The minimum digital filter clock rate for a config-
uration depends on the computation cycles required
to complete digital filter convolutions at the select-
ed output word rate. All configurations work for a
maximum digital filter clock, but lower clock rates
consume less power.
Standby Mode
The CS5378 can be placed in a low-power standby
mode by sending the `Filter Stop' configuration
command and programming the digital filter clock
to 32 kHz. In this mode the digital filter idles, con-
suming minimal power until re-enabled by later
configuration commands.
Bits
23:20
19:16
15:12
11:8
7:4
3:0
Selection
0000
0000
IIR2
IIR1
FIR2
FIR1
Figure 22. FIR and IIR Coefficient Set Selection Word
Bits 15:12
IIR2 Coefficients
0000
3 Hz @ 2000 SPS
0001
3 Hz @ 1000 SPS
0010
3 Hz @ 500 SPS
0011
3 Hz @ 333 SPS
0100
3 Hz @ 250 SPS
Bits 11:8
IIR1 Coefficients
0000
3 Hz @ 2000 SPS
0001
3 Hz @ 1000 SPS
0010
3 Hz @ 500 SPS
0011
3 Hz @ 333 SPS
0100
3 Hz @ 250 SPS
Bits 7:4
FIR2 Coefficients
0000
Linear Phase
0001
Minimum Phase
Bits 3:0
FIR1 Coefficients
0000
Linear Phase
0001
Minimum Phase

CS5378
DS639F1
40
12. SINC FILTER
The SINC filter primary purpose is to attenuate out-
of-band noise components from the
modula-
tors. While doing so, they decimate 1-bit
data
into lower frequency 24-bit data suitable for the
FIR and IIR filters.
The SINC filter has three cascaded sections,
SINC1, SINC2, and SINC3, which are each made
up of the smaller stages shown in Figure 23.
The selected output word rate in the FILTCFG reg-
ister automatically determines the coefficients and
decimation ratios selected for the SINC filters.
12.1 SINC1 Filter
The first section is SINC1, a single stage 5th order
fixed decimate by 8 SINC filter. This SINC filter
decimates the incoming 1-bit
bit stream from
the modulators down to a 64 kHz rate.
12.2 SINC2 Filter
The second section is SINC2, a multi-stage, vari-
able order, variable decimation SINC filter. De-
pending on the selected output word rate in the
FILTCFG register, different cascaded SINC2 stag-
es are enabled, as shown in Table 11.
12.3 SINC3 Filter
The last section is SINC3, a flexible multi-stage
variable order, variable decimation SINC filter.
Depending on the selected output word rate in the
FILTCFG register, different SINC3 stages are en-
abled, as shown in Table 11.
12.4 SINC Filter Synchronization
The SINC filter is synchronized to the external sys-
tem by the MSYNC signal, which is generated
from the SYNC input. The MSYNC signal sets a
reference time (time 0) for all filter operations, and
the SINC filter is restarted to phase align with this
reference time.
sinc1
8
5th order
4th order
Figure 23. SINC Filter Block Diagram
1-bit
24-bit
-
2
stage1
sinc2
4th order
2
stage2
sinc2
5th order
2
stage3
sinc2
6th order
2
stage4
sinc2
4th order
5
stage1
sinc3
4th order
5
stage2
sinc3
4th order
5
stage3
sinc3
5th order
2
stage5
sinc3
6th order
3
stage6
sinc3
6th order
2
stage7
sinc3
Output
Input
5th order
5
stage4
sinc3

CS5378
DS639F1
41
Figure 24. SINC Filter Stages
SINC1 � Single stage, fixed decimate by 8
5
th
order decimate by 8, 36 coefficients
SINC2 � Multi-stage, variable decimation
Stage 1: 4
th
order decimate by 2, 5 coefficients
Stage 2: 4
th
order decimate by 2, 5 coefficients
Stage 3: 5
th
order decimate by 2, 6 coefficients
Stage 4: 6
th
order decimate by 2, 7 coefficients
SINC3 � Multi-stage, variable decimation
Stage 1: 4
th
order decimate by 5, 17 coefficients
Stage 2: 4
th
order decimate by 5, 17 coefficients
Stage 3: 4
th
order decimate by 5, 17 coefficients
Stage 4: 5
th
order decimate by 5, 21 coefficients
Stage 5: 5
th
order decimate by 2, 6 coefficients
Stage 6: 6
th
order decimate by 3, 13 coefficients
Stage 7: 6
th
order decimate by 2, 7 coefficients
Table 11. SINC Filter Configurations
SINC filters
FIR2
Output
Word
Rate
DEC Bit
Setting
SINC1
Deci-
mation
SINC2
Deci-
mation
SINC2
Stages
SINC3
Deci-
mation
SINC3
Stages
4000
0111
8 2 4 - -
2000
0110
8 4 3,4 -
-
1000
0101 8
8 2,3,4 -
-
500 0100 8
16
1,2,3,4 -
-
333
0011 8
8 2,3,4 3
6
250 0010 8
16
1,2,3,4 2
7
200 0001 8
4
3,4 10
4,7
125 0000 8
16
1,2,3,4 4
5,7
100 1111 8
4
3,4 20 3,5,7
50 1110 8
8 2,3,4 20 3,5,7
40 1101 8
4 3,4 50 3,4,7
25 1100
8
16 1,2,3,4 20
3,5,7
20 1011 8
4 3,4 100
2,3,5,7
10 1010 8
8 2,3,4
100
2,3,5,7
5 1001 8
16
1,2,3,4
100
2,3,5,7
1 1000 8
16
1,2,3,4
500
1,2,3,5,7
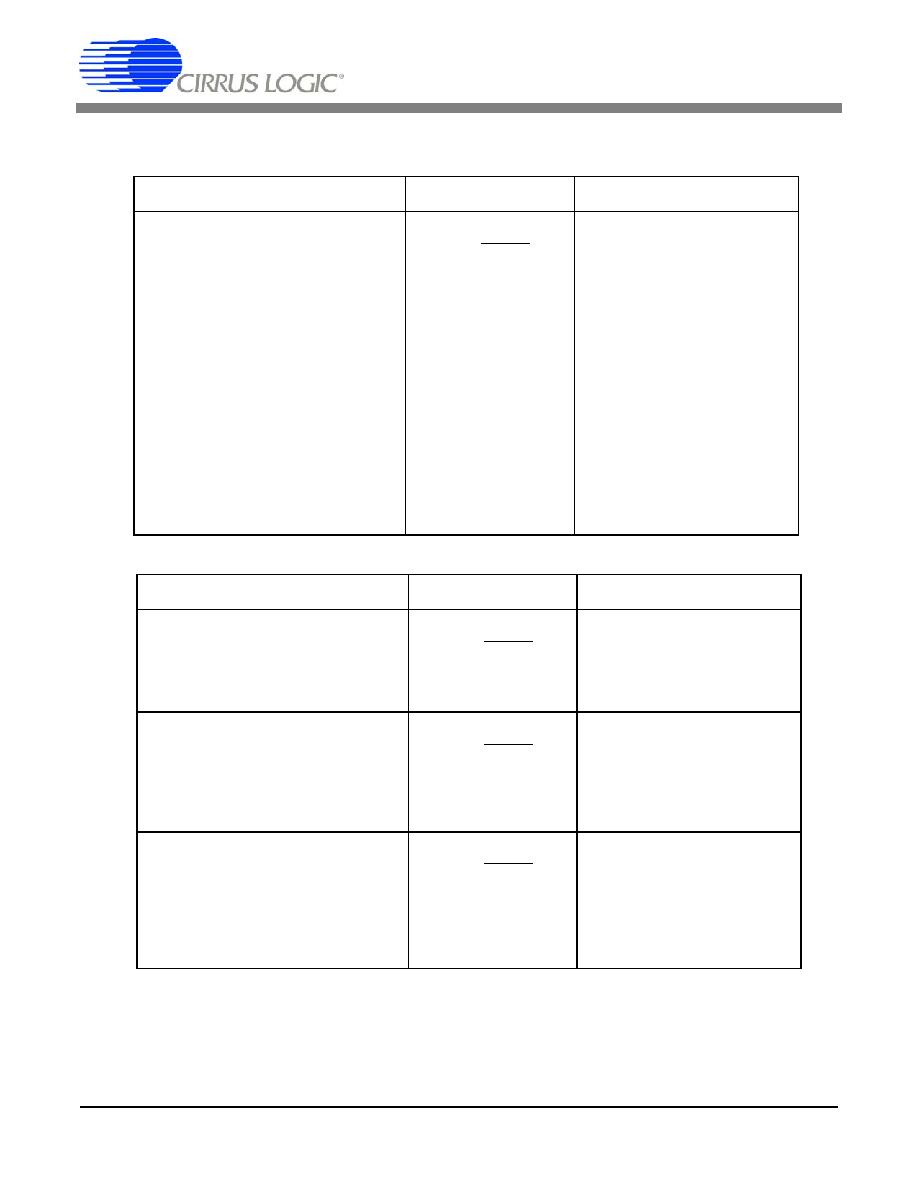
CS5378
DS639F1
42
Filter Type
System Function
Filter Coefficients
SINC2 (Stage 1)
SINC2 (Stage 2)
4
th
order decimate by 2
5 coefficients
4
1
2
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1
h
1
= 4
h
2
= 6
h
3
= 4
h
4
= 1
SINC2 (Stage 3)
5
th
order decimate by 2
6 coefficients
5
1
2
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1
h
1
= 5
h
2
= 10
h
3
= 10
h
4
= 5
h
5
= 1
SINC2 (Stage 4)
6
th
order decimate by 2
7 coefficients
6
1
2
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1
h
1
= 6
h
2
= 15
h
3
= 20
h
4
= 15
h
5
= 6
h
6
= 1
Filter Type
System Function
Filter Coefficients
SINC1
5
th
order decimate by 8
36 coefficients
5
1
8
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1 h
18
= 2460
h
1
= 5 h
19
= 2380
h
2
= 15 h
20
= 2226
h
3
= 35 h
21
= 2010
h
4
= 70 h
22
= 1750
h
5
= 126 h
23
= 1470
h
6
= 210 h
24
= 1190
h
7
= 330 h
25
= 926
h
8
= 490 h
26
= 690
h
9
= 690 h
27
= 490
h
10
= 926 h
28
= 330
h
11
= 1190 h
29
= 210
h
12
= 1470 h
30
= 126
h
13
= 1750 h
31
= 70
h
14
= 2010 h
32
= 35
h
15
= 2226 h
33
= 15
h
16
= 2380 h
34
= 5
h
17
= 2460 h
35
= 1
Table 12. SINC1 and SINC2 Filter Coefficients
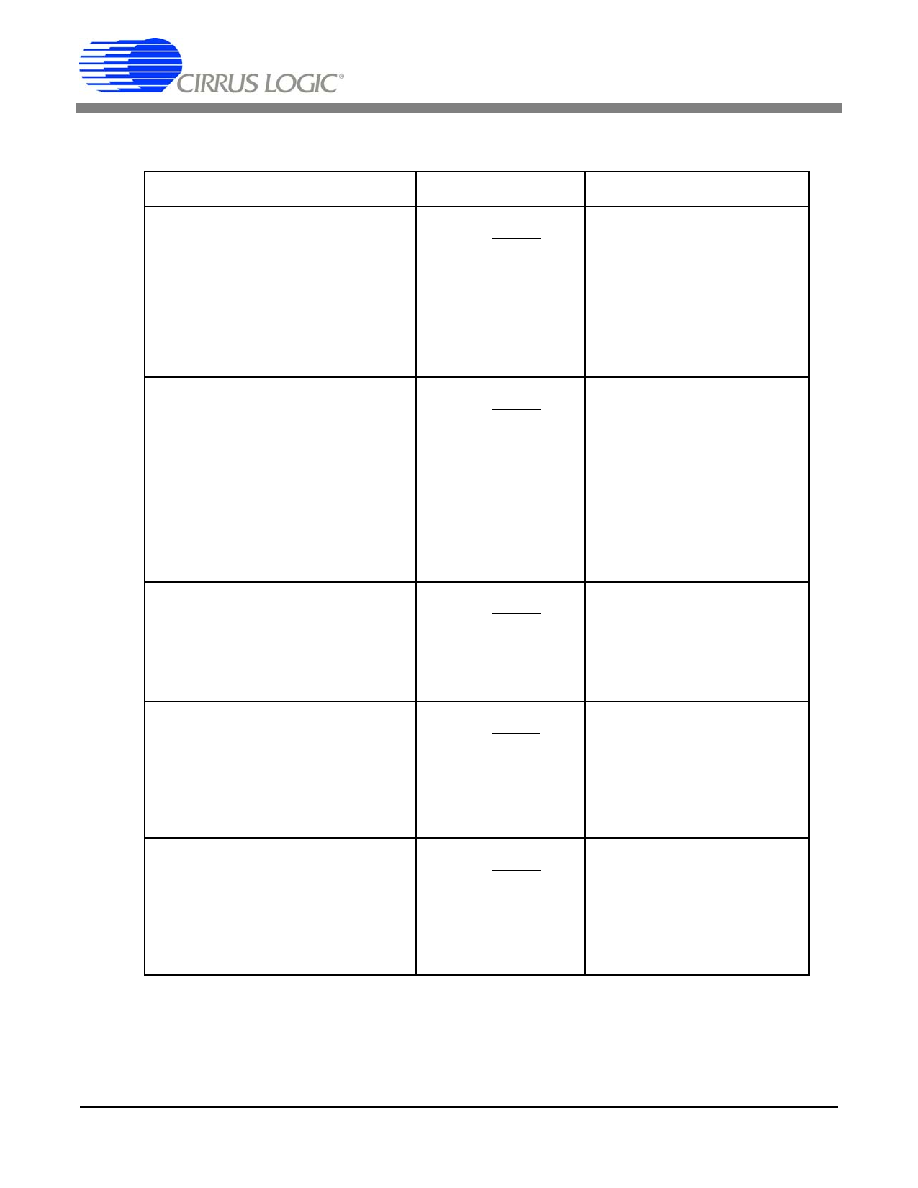
CS5378
DS639F1
43
Table 13. SINC3 Filter Coefficients
Filter Type
System Function
Filter Coefficients
SINC3 (Stage 1)
SINC3 (Stage 2)
SINC3 (Stage 3)
4
th
order decimate by 5
17 coefficients
4
1
5
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1 h
9
= 80
h
1
= 4 h
10
= 68
h
2
= 10 h
11
= 52
h
3
= 20 h
12
= 35
h
4
= 35 h
13
= 20
h
5
= 52 h
14
= 10
h
6
= 68 h
15
= 4
h
7
= 80 h
16
= 1
h
8
= 85
SINC3 (Stage 4)
5
th
order decimate by 5
21 coefficients
5
1
5
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1 h
11
= 365
h
1
= 5 h
12
= 320
h
2
= 15 h
13
= 255
h
3
= 35 h
14
= 185
h
4
= 70 h
15
= 121
h
5
= 121 h
16
= 70
h
6
= 185 h
17
= 35
h
7
= 255 h
18
= 15
h
8
= 320 h
19
= 5
h
9
= 365 h
20
= 1
h
10
= 381
SINC3 (Stage 5)
5
th
order decimate by 2
6 coefficients
5
1
2
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1
h
1
= 5
h
2
= 10
h
3
= 10
h
4
= 5
h
5
= 1
SINC3 (Stage 6)
6
th
order decimate by 3
13 coefficients
6
1
3
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1 h
7
= 126
h
1
= 6 h
8
= 90
h
2
= 21 h
9
= 50
h
3
= 50 h
10
= 21
h
4
= 90 h
11
= 6
h
5
= 126 h
12
= 1
h
6
= 141
SINC3 (Stage 7)
6
th
order decimate by 2
7 coefficients
6
1
2
1
1
)
(
-
-
=
-
-
z
z
z
H
h
0
= 1
h
1
= 6
h
2
= 15
h
3
= 20
h
4
= 15
h
5
= 6
h
6
= 1
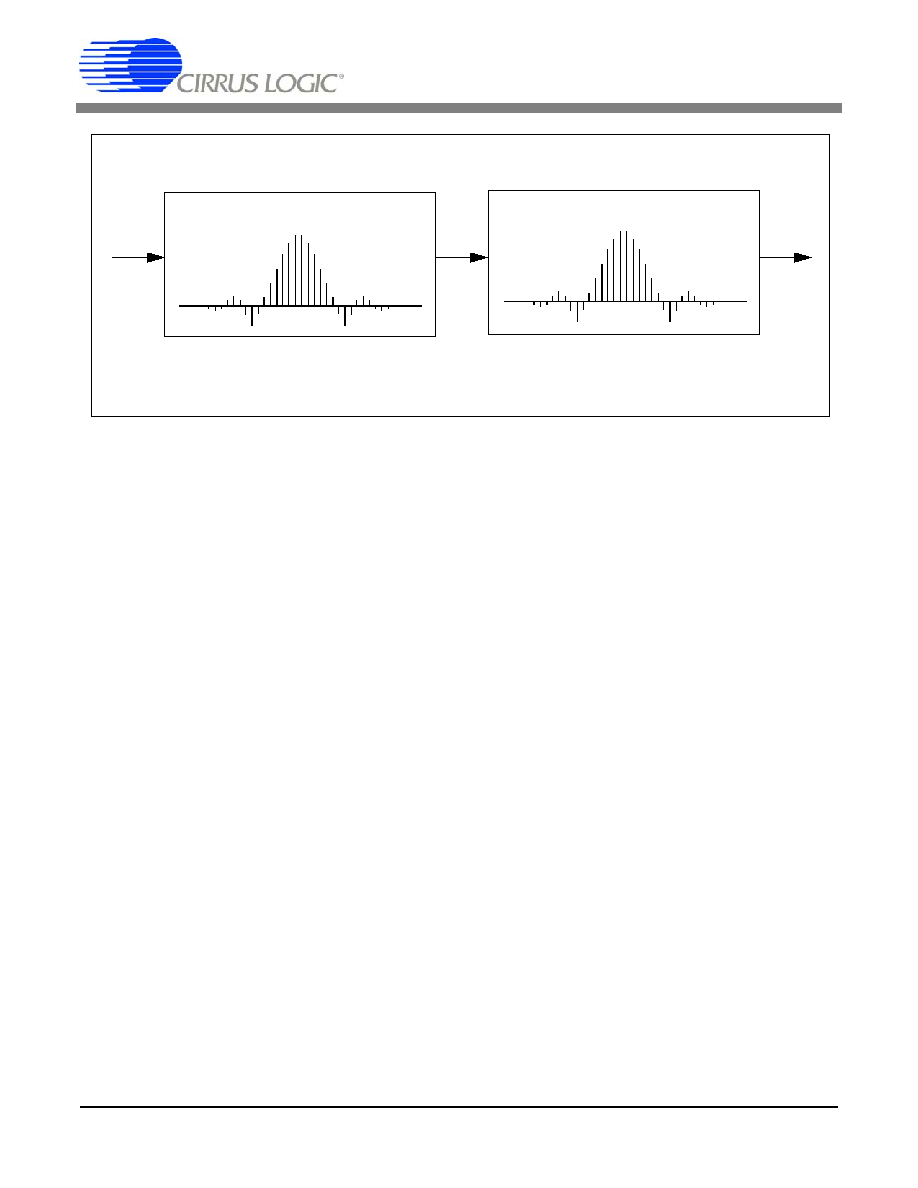
CS5378
DS639F1
44
13. FIR FILTER
The finite impulse response (FIR) filter block con-
sists of two cascaded stages, FIR1 and FIR2. It
compensates for SINC filter droop and creates a
low-pass corner to block aliased components of the
input signal.
On-chip linear phase or minimum phase coeffi-
cients can be selected using a configuration com-
mand, or the coefficients can be programmed for a
custom filter response.
13.1 FIR1 Filter
The FIR1 filter stage has a decimate by four archi-
tecture. It compensates for SINC filter droop and
flattens the magnitude response of the pass band.
The on-chip linear and minimum phase coefficient
sets are 48-tap, with a maximum 255 programma-
ble coefficients. All coefficients are normalized to
24-bit two's complement full scale, 0x7FFFFF.
The characteristic equation for FIR1 is a convolu-
tion of the input values, X(n), and the filter coeffi-
cients, h(k), to produce an output value, Y.
Y = [h(k)*X(n-k)] + [h(k+1)*X(n-(k+1))] + ...
13.2 FIR2 Filter
The FIR2 filter stage has a decimate by two archi-
tecture. It creates a low-pass brick wall filter to
block aliased components of the input signal.
The on-chip linear and minimum phase coefficient
sets are 126-tap, with a maximum 255 programma-
ble coefficients. All coefficients are normalized to
24-bit two's complement full scale, 0x7FFFFF.
The characteristic equation for FIR2 is a convolu-
tion of the input values, X(n), and the filter coeffi-
cients, h(k), to produce an output value, Y.
Y = [h(k)*X(n-k)] + [h(k+1)*X(n-(k+1))] + ...
13.3 On-Chip FIR Coefficients
Two sets of on-chip coefficients, linear phase and
minimum phase, are available for FIR1 and FIR2.
Performance of the on-chip coefficient sets is very
good, with excellent ripple and stop band charac-
teristics as described in Figure 26 and Table 14.
Which on-chip coefficient set to use is selected by
a data word following the `Write ROM Coeffi-
cients' configuration command. See "Filter Coef-
ficient Selection" on page 38 for information about
selecting on-chip coefficient sets.
FIR1 Filter - decimate by 4
FIR2 Filter - decimate by 2
Figure 25. FIR Filter Block Diagram

CS5378
DS639F1
45
13.4 Programmable FIR Coefficients
A maximum of 255 + 255 coefficients can be pro-
grammed into FIR1 and FIR2 to create a custom
filter response. The total number of coefficients for
the FIR filter is fundamentally limited by the avail-
able computation cycles in the digital filter, which
itself is determined by the digital filter clock rate.
Custom filter sets should normalize the maximum
coefficient value to 24-bit two's complement full
scale, 0x7FFFFF, and scale all other coefficients
accordingly. To maintain maximum internal dy-
namic range, the CS5378 FIR filter performs dou-
ble precision calculations with an automatic gain
correction to scale the final output.
Custom FIR coefficients are uploaded using the
`Write FIR Coefficients' configuration command.
See "EEPROM Configuration Commands" on
page 27 or "Microcontroller Configuration Com-
mands" on page 33 for information about writing
custom FIR coefficients.
13.5 FIR Filter Synchronization
The FIR1 and FIR2 filters are synchronized to the
external system by the MSYNC signal, which is
generated from the SYNC input. The MSYNC sig-
nal sets a reference time (time 0) for all filter oper-
ations, and the FIR filters are restarted to phase
align with this reference time.
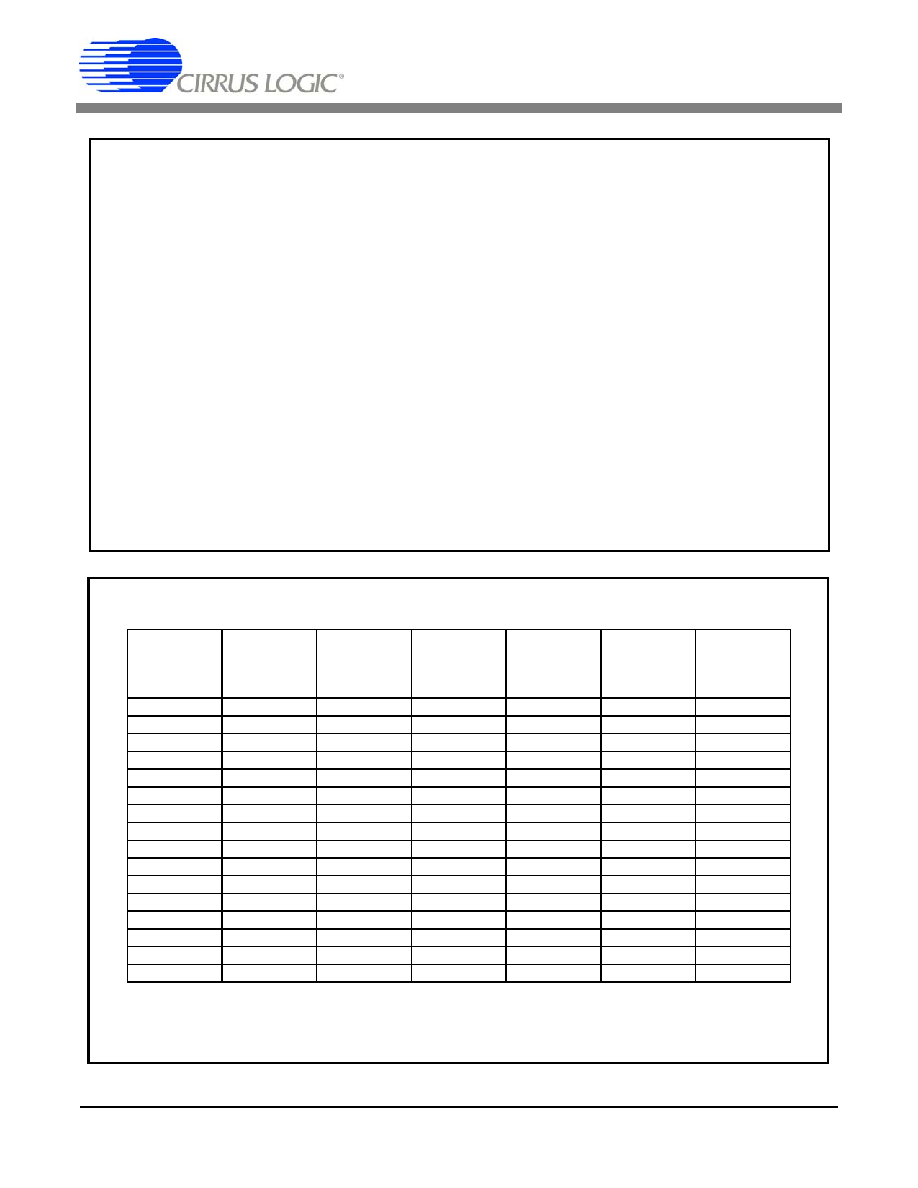
CS5378
DS639F1
46
FIR1 � Single stage, fixed decimate by 4
Coefficient set 0: linear phase decimate by 4, 48 coefficients
Coefficient set 1: minimum phase decimate by 4, 48 coefficients
SINC droop compensation filter
FIR2 � Single stage, fixed decimate by 2
Coefficient set 0: linear phase decimate by 2, 126 coefficients
Coefficient set 1: minimum phase decimate by 2, 126 coefficients
Brick wall low-pass filter, flat to 40% f
s
Combined SINC + FIR digital filter specifications
Passband ripple less than +/- 0.01 dB below 40% f
s
Transition band -3 dB frequency at 42.89% f
s
Stopband attenuation greater than 130 dB above 50% f
s
Figure 26. FIR Filter Stages
SINC + FIR filters
FIR2
Output
Word
Rate
SINC
Deci-
mation
FIR1
Deci-
mation
FIR2
Deci-
mation
Total
Deci-
mation
Passband
Ripple
(
� dB)
Stopband
Atten-
uation
(dB)
4000 16
4
2 128
0.0042
130.38
2000 32
4
2 256
0.0045
130.38
1000 64
4
2 512
0.0040
130.42
500 128 4
2 1024
0.0041
130.42
333 192 4
2 1536
0.0080
130.45
250 256 4
2 2048
0.0064
130.43
200 320 4
2 2560
0.0043
130.44
125 512 4
2 4096
0.0046
130.42
100 640 4
2 5120
0.0040
130.43
50 1280 4
2 10240
0.0040
130.43
40 1600 4
2 12800
0.0040
130.44
25 2560 4
2 20480
0.0040
132.98
20 3200 4
2 25600
0.0036
130.43
10 6400 4
2 51200
0.0036
130.43
5 12800 4
2 102400
0.0036
130.43
1 64000 4
2 512000
0.0029
134.31
Table 14. FIR Filter Characteristics
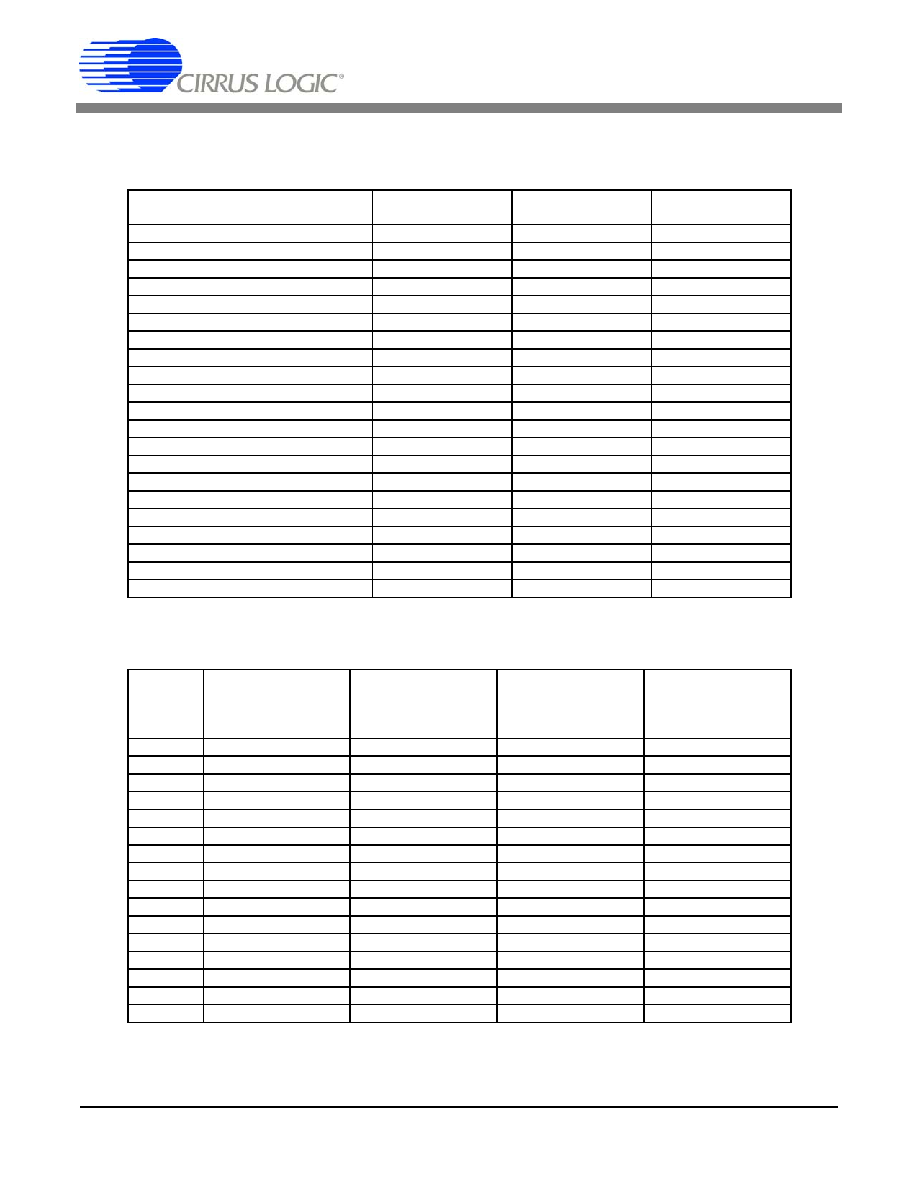
CS5378
DS639F1
47
Table 15. SINC + FIR Group Delay
Individual filter stage group delay (no IIR)
Decimation
Ratios
Number of
Coefficients
Group Delay
(Input Rate)
SINC1
8 36
17.5
SINC2
Stage 4
2
7
3.0
Stages
3,4
2,2 6,7 8.5
Stages 2,3,4
2,2,2
5,6,7
19.0
Stages 1,2,3,4
2,2,2,2
5,5,6,7
40.0
SINC3
Stage 7
2
7
3.0
Stage 6
3
13
6.0
Stages
5,7
2,2 6,7 8.5
Stages 4,7
5,2
21,7
25.0
Stages 3,5,7
5,2,2
17,6,7
50.5
Stages
3,4,7
5,5,2 17,21,7 133.0
Stages 2,3,5,7
5,5,2,2
17,17,6,7
260.5
Stages 1,2,3,5,7
5,5,5,2,2
17,17,17,6,7
1310.5
FIR1
Coefficient Set 0
4
48
23.5
Coefficient Set 1
4
48
See Figure
FIR2
Coefficient Set 0
2
126
62.5
Coefficient Set 1
2
126
See Figure
Cumulative linear phase group delay (no IIR)
FIR2
Output
Word
Rate
SINC Output
Group Delay
(SINC Filter
Input Rate)
FIR1 Output
Group Delay
(SINC Filter
Input Rate)
FIR2 Output
Group Delay
(SINC Filter
Input Rate)
FIR2 Output
Group Delay
(FIR2 Output
Word Rate)
4000 41.5
417.5
4417.5
34.5117
2000 85.5
837.5
8837.5
34.5215
1000 169.5
1673.5
17673.5
34.5186
500 337.5
3345.5
35345.5 34.5171
333 553.5
5065.5
53065.5 34.5479
250 721.5
6737.5
70737.5 34.5398
200 885.5
8405.5
88405.5 34.5334
125 1425.5
13457.5 141457.5 34.5355
100 1701.5
16741.5 176741.5 34.5198
50 3401.5
33481.5 353481.5 34.5197
40 4341.5
41941.5 441941.5 34.5267
25 6801.5
66961.5 706961.5 34.5196
20 8421.5
83621.5 883621.5 34.5165
10 16841.5 167241.5 1767241.5 34.5164
5 33681.5 334481.5 3534481.5 34.5164
1 168081.5 1672081.5
17672081.5 34.5158

CS5378
DS639F1
48
Minimum phase group delay
FIR1
Minimum
Phase Group
Delay
(Normalized
frequency)
FIR2
Minimum
Phase Group
Delay
(Normalized
frequency)
Table 16. Minimum Phase Group Delay
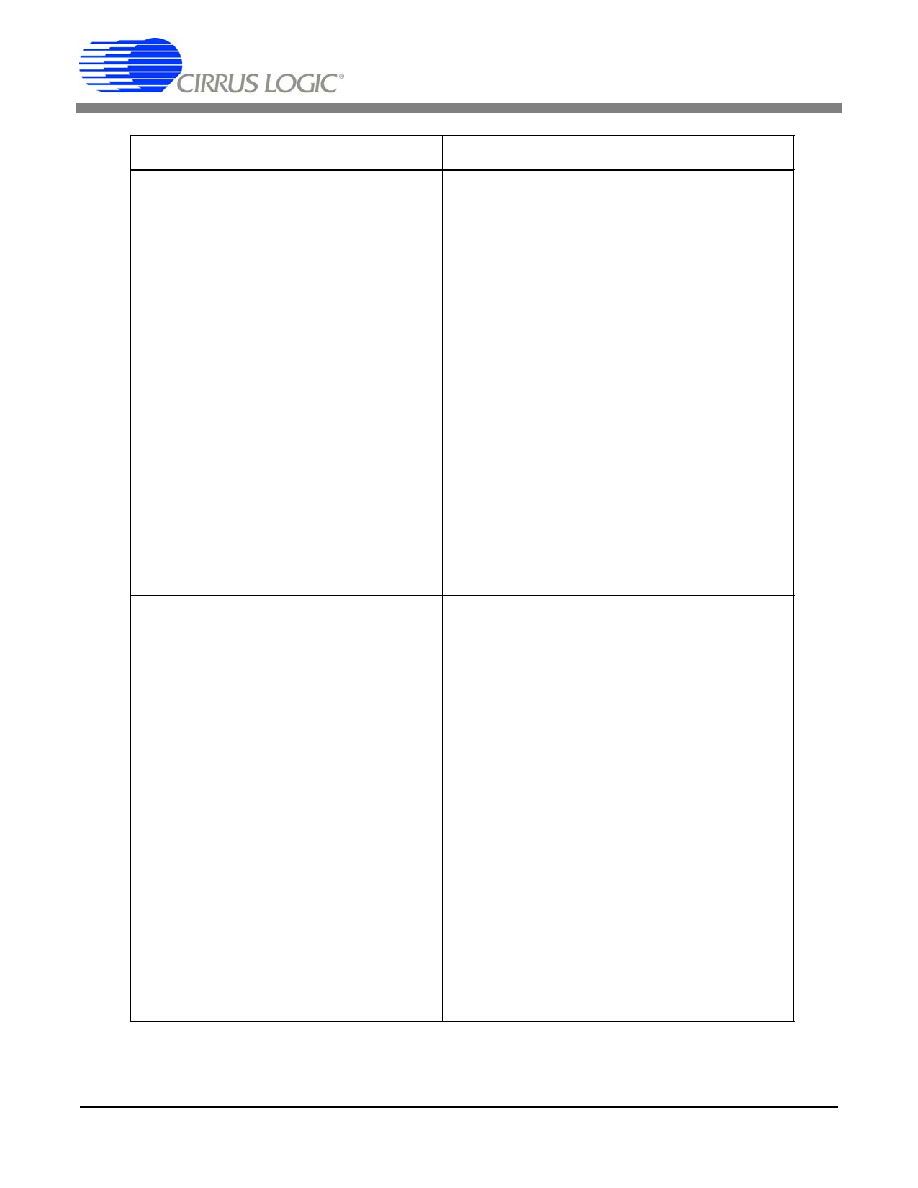
CS5378
DS639F1
49
Filter Type
Filter Coefficients
(normalized 24-bit)
FIR1 (Coefficient set 0)
Low pass, SINC compensation
Linear phase decimate by 4
48 coefficients
h
0
= 558 h
24
= 8388607
h
1
= 1905 h
25
= 7042723
h
2
= 3834 h
26
= 4768946
h
3
= 5118 h
27
= 2266428
h
4
= 365 h
28
= 189436
h
5
= -14518 h
29
= -1053303
h
6
= -39787 h
30
= -1392827
h
7
= -67365 h
31
= -1084130
h
8
= -69909 h
32
= -496361
h
9
= -19450 h
33
= 39864
h
10
= 97434 h
34
= 332367
h
11
= 258881 h
35
= 375562
h
12
= 375562 h
36
= 258881
h
13
= 332367 h
37
= 97434
h
14
= 39864 h
38
= -19450
h
15
= -496361 h
39
= -69909
h
16
= -1084130 h
40
= -67365
h
17
= -1392827 h
41
= -39787
h
18
= -1053303 h
42
= -14518
h
19
= 189436 h
43
= 365
h
20
= 2266428 h
44
= 5118
h
21
= 4768946 h
45
= 3834
h
22
= 7042723 h
46
= 1905
h
23
= 8388607 h
47
= 558
FIR1 (Coefficient set 1)
Low pass, SINC compensation
Minimum phase decimate by 4
48 coefficients
h
0
= 3337 h
24
= 555919
h
1
= 22258 h
25
= -165441
h
2
= 88284 h
26
= -581479
h
3
= 266742 h
27
= -617500
h
4
= 655747 h
28
= -388985
h
5
= 1371455 h
29
= -99112
h
6
= 2502684 h
30
= 114761
h
7
= 4031988 h
31
= 186557
h
8
= 5783129 h
32
= 141374
h
9
= 7396359 h
33
= 58582
h
10
= 8388607 h
34
= -12664
h
11
= 8325707 h
35
= -42821
h
12
= 6988887 h
36
= -35055
h
13
= 4531706 h
37
= -16792
h
14
= 1507479 h
38
= 367
h
15
= -1319126 h
39
= 7929
h
16
= -3207750 h
40
= 5926
h
17
= -3736028 h
41
= 2892
h
18
= -2980701 h
42
= 23
h
19
= -1421498 h
43
= -1164
h
20
= 237307 h
44
= -538
h
21
= 1373654 h
45
= -238
h
22
= 1711919 h
46
= 18
h
23
= 1322371 h
47
= 113
Figure 27. FIR1 Coefficients
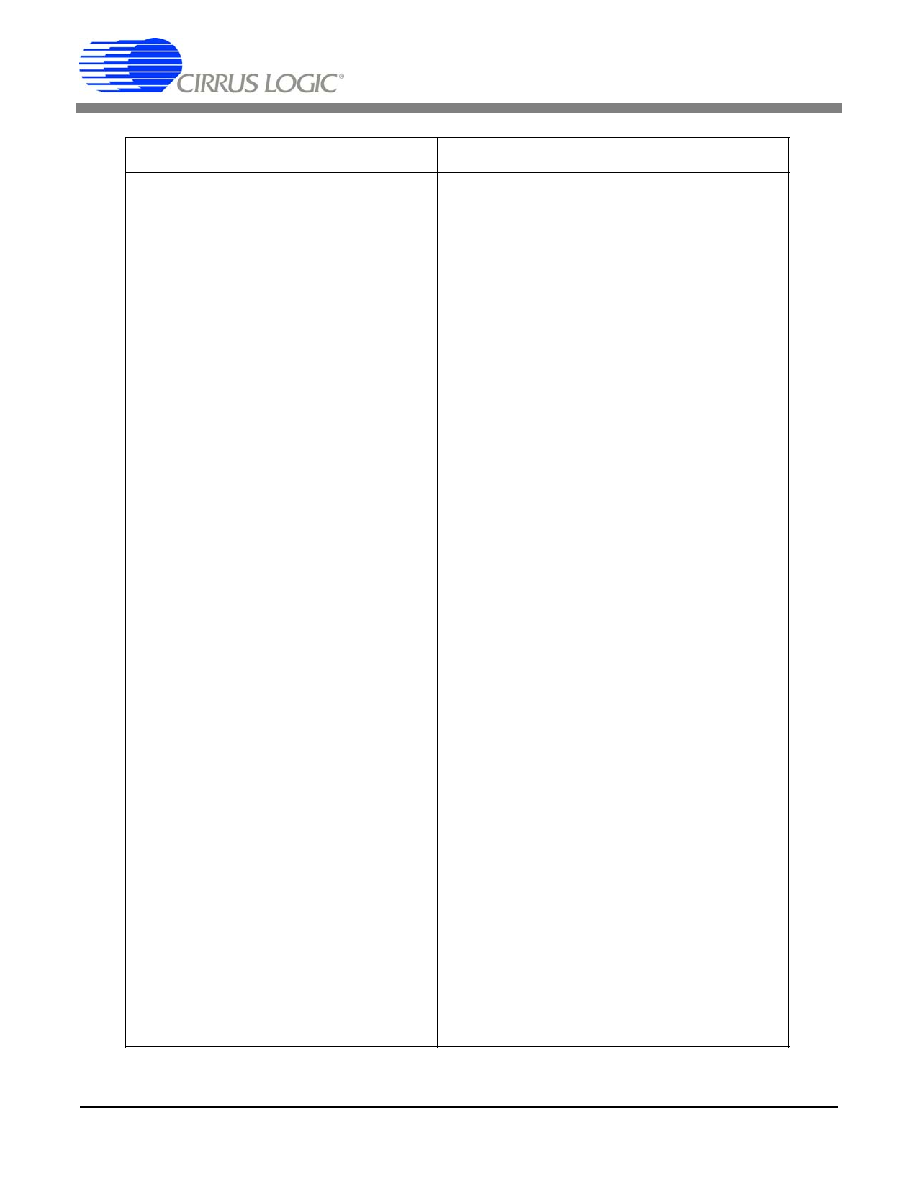
CS5378
DS639F1
50
Filter Type
Filter Coefficients
(normalized 24-bit)
FIR2 (Coefficient set 0)
Low pass, passband to 40% f
s
Linear phase decimate by 2
126 coefficients
h
0
= -71 h
63
= 8388607
h
1
= -371 h
64
= 3875315
h
2
= -870 h
65
= -766230
h
3
= -986 h
66
= -1854336
h
4
= 34 h
67
= -137179
h
5
= 1786 h
68
= 1113788
h
6
= 2291 h
69
= 454990
h
7
= 291 h
70
= -642475
h
8
= -2036 h
71
= -553873
h
9
= -943 h
72
= 298975
h
10
= 2985 h
73
= 533334
h
11
= 3784 h
74
= -49958
h
12
= -1458 h
75
= -443272
h
13
= -5808 h
76
= -116005
h
14
= -1007 h
77
= 318763
h
15
= 7756 h
78
= 208018
h
16
= 5935 h
79
= -187141
h
17
= -7135 h
80
= -238025
h
18
= -11691 h
81
= 68863
h
19
= 3531 h
82
= 221211
h
20
= 17500 h
83
= 22850
h
21
= 4388 h
84
= -174452
h
22
= -20661 h
85
= -81993
h
23
= -15960 h
86
= 114154
h
24
= 18930 h
87
= 109009
h
25
= 29808 h
88
= -54172
h
26
= -9795 h
89
= -109189
h
27
= -42573 h
90
= 4436
h
28
= -7745 h
91
= 90744
h
29
= 49994 h
92
= 29702
h
30
= 33021 h
93
= -62651
h
31
= -47092 h
94
= -47092
h
32
= -62651 h
95
= 33021
h
33
= 29702 h
96
= 49994
h
34
= 90744 h
97
= -7745
h
35
= 4436 h
98
= -42573
h
36
= -109189 h
99
= -9795
h
37
= -54172 h
100
= 29808
h
38
= 109009 h
101
= 18930
h
39
= 114154 h
102
= -15960
h
40
= -81993 h
103
= -20661
h
41
= -174452 h
104
= 4388
h
42
= 22850 h
105
= 17500
h
43
= 221211 h
106
= 3531
h
44
= 68863 h
107
= -11691
h
45
= -238025 h
108
= -7135
h
46
= -187141 h
109
= 5935
h
47
= 208018 h
110
= 7756
h
48
= 318763 h
111
= -1007
h
49
= -116005 h
112
= -5808
h
50
= -443272 h
113
= -1458
h
51
= -49958 h
114
= 3784
h
52
= 533334 h
115
= 2985
h
53
= 298975 h
116
= -943
h
54
= -553873 h
117
= -2036
h
55
= -642475 h
118
= 291
h
56
= 454990 h
119
= 2291
h
57
= 1113788 h
120
= 1786
h
58
= -137179 h
121
= 34
h
59
= -1854336 h
122
= -986
h
60
= -766230 h
123
= -870
h
61
= 3875315 h
124
= -371
h
62
= 8388607 h
125
= -71
Figure 28. FIR2 Linear Phase Coefficients
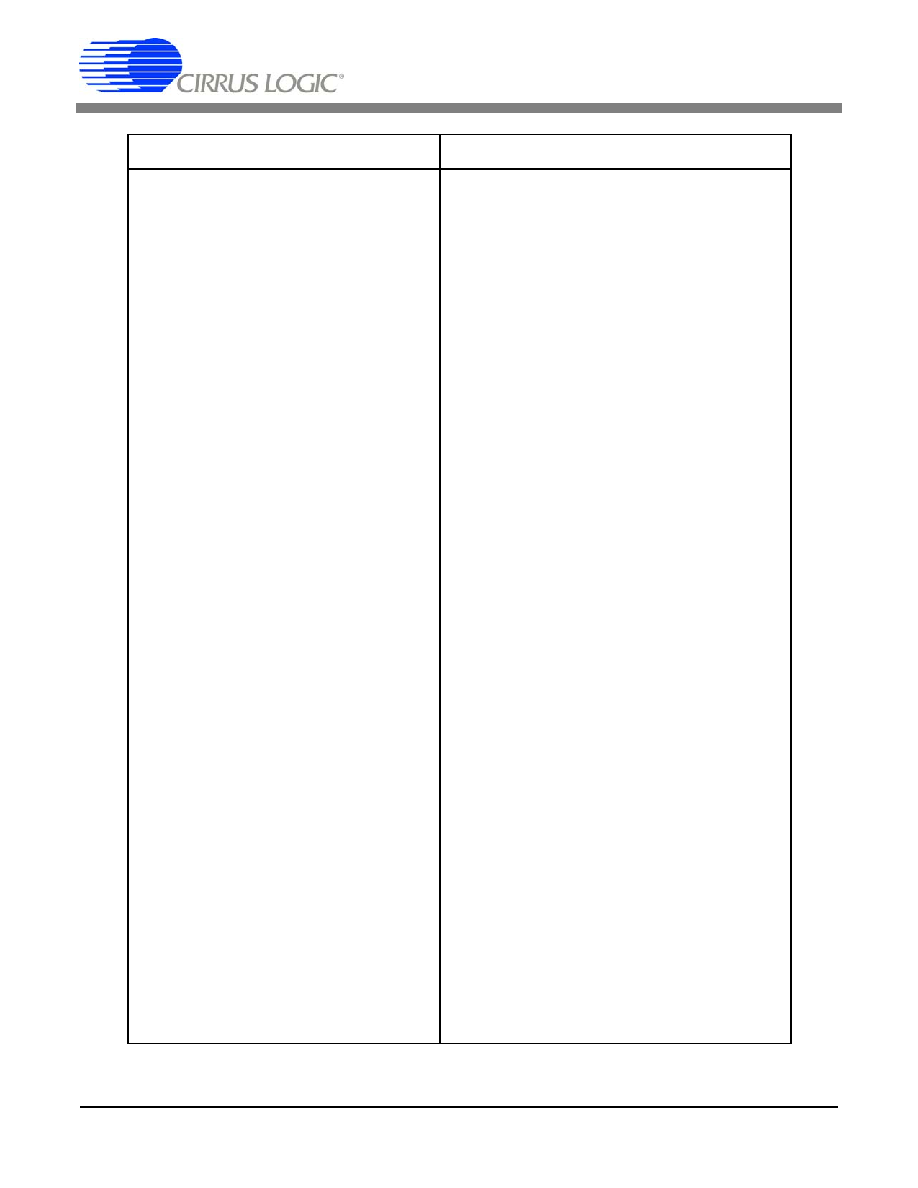
CS5378
DS639F1
51
Filter Type
Filter Coefficients
(normalized 24-bit)
FIR2 (Coefficient set 1)
Low pass, passband to 40% f
s
Minimum phase decimate by 2
126 coefficients
h
0
= 4019 h
63
= 67863
h
1
= 43275 h
64
= -190800
h
2
= 235427 h
65
= -128546
h
3
= 848528 h
66
= 114197
h
4
= 2240207 h
67
= 147750
h
5
= 4525758 h
68
= -46352
h
6
= 7077833 h
69
= -143269
h
7
= 8388607 h
70
= -13290
h
8
= 6885673 h
71
= 114721
h
9
= 2483461 h
72
= 51933
h
10
= -2538963 h
73
= -75952
h
11
= -4800543 h
74
= -68746
h
12
= -2761696 h
75
= 38171
h
13
= 1426109 h
76
= 68492
h
14
= 3624338 h
77
= -7856
h
15
= 1820814 h
78
= -57526
h
16
= -1695825 h
79
= -12540
h
17
= -2885148 h
80
= 41717
h
18
= -605252 h
81
= 23334
h
19
= 2135021 h
82
= -25516
h
20
= 1974197 h
83
= -26409
h
21
= -630111 h
84
= 11717
h
22
= -2168177 h
85
= 24246
h
23
= -750147 h
86
= -1620
h
24
= 1516192 h
87
= -19248
h
25
= 1550127 h
88
= -4610
h
26
= -508445 h
89
= 13356
h
27
= -1686937 h
90
= 7526
h
28
= -437822 h
91
= -7887
h
29
= 1308705 h
92
= -8016
h
30
= 1069556 h
93
= 3559
h
31
= -657282 h
94
= 7023
h
32
= -1301014 h
95
= -598
h
33
= -30654 h
96
= -5350
h
34
= 1173754 h
97
= -1097
h
35
= 579643 h
98
= 3579
h
36
= -803111 h
99
= 1806
h
37
= -895851 h
100
= -2058
h
38
= 328399 h
101
= -1859
h
39
= 962522 h
102
= 936
h
40
= 124678 h
103
= 1558
h
41
= -820948 h
104
= -224
h
42
= -466657 h
105
= -1129
h
43
= 545674 h
106
= -152
h
44
= 652827 h
107
= 718
h
45
= -220448 h
108
= 290
h
46
= -680495 h
109
= -395
h
47
= -80886 h
110
= -290
h
48
= 578844 h
111
= 178
h
49
= 306445 h
112
= 227
h
50
= -395302 h
113
= -53
h
51
= -431004 h
114
= -151
h
52
= 181900 h
115
= -5
h
53
= 454403 h
116
= 86
h
54
= 15856 h
117
= 23
h
55
= -395525 h
118
= -42
h
56
= -166123 h
119
= -22
h
57
= 284099 h
120
= 17
h
58
= 253485 h
121
= 14
h
59
= -152407 h
122
= -5
h
60
= -277888 h
123
= -7
h
61
= 28526 h
124
= 1
h
62
= 250843 h
125
= 3
Figure 29. FIR2 Minimum Phase Coefficients
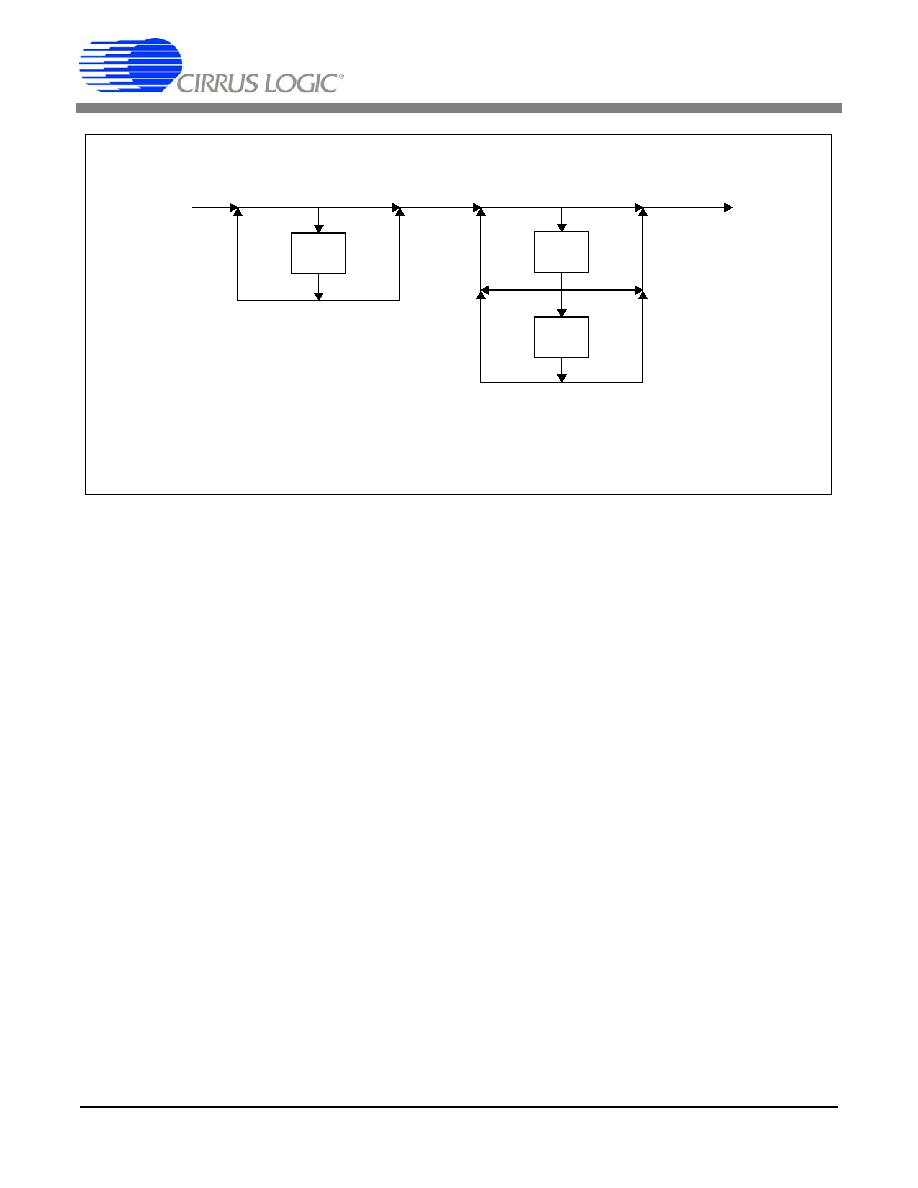
CS5378
DS639F1
52
14. IIR FILTER
The infinite impulse response (IIR) filter block
consists of two cascaded stages, IIR1 and IIR2. It
creates a high-pass corner to block very low-fre-
quency and DC components of the input signal.
On-chip IIR1 and IIR2 coefficients can be selected
using a configuration command, or the coefficients
can be programmed for a custom filter response.
14.1 IIR Architecture
The architecture of the IIR filter is automatically
determined when the output filter stage is selected
in the FILTCFG register. Selecting the 1st order
IIR1 filter bypasses the 2nd order stage, while se-
lecting the 2nd order IIR2 filter bypasses the 1st or-
der stage. Selection of the 3rd order IIR3 filter
enables both the 1st and 2nd order stages.
14.2 IIR1 Filter
The 1st order IIR filter stage is a direct form filter
with three coefficients: a11, b10, and b11. Coeffi-
cients of a 1st order IIR are inherently normalized
to one, and should be scaled to 24-bit two's com-
plement full scale, 0x7FFFFF.
The characteristic equations for the 1st order IIR
include an input value, X, an output value, Y, and
two intermediate values, W1 and W2, separated by
a delay element (z
-1
).
W2 = W1
W1 = X + (-a11 * W2)
Y = (W1 * b10) + (W2 * b11)
14.3 IIR2 Filter
The 2nd order IIR filter stage is a direct form filter
with five coefficients: a21, a22, b20, b21, and b22.
Coefficients of a 2nd order IIR are inherently nor-
malized to two, and should be scaled to 24-bit
two's complement full scale, 0x7FFFFF. Normal-
ization effectively divides the 2nd order coeffi-
cients in half relative to the input, and requires
modification of the characteristic equations.
The characteristic equations for the 2nd order IIR
include an input value, X, an output value, Y, and
three intermediate values, W3, W4, and W5, each
separated by a delay element (z
-1
). The following
Z
-1
Z
-1
Z
-1
-a
11
b
11
b
10
-a
21
-a
22
b
21
b
22
b
20
Figure 30. IIR Filter Block Diagram
1st Order IIR1
2nd Order IIR2
3rd Order IIR3 implemented by
running both IIR1 and IIR2 stages
CS5378
DS639F1
53
characteristic equations model the operation of the
2nd order IIR filter with unnormalized coefficients.
W5 = W4
W4 = W3
W3 = X + (-a21 * W4) + (-a22 * W5)
Y = (W3 * b20) + (W4 * b21) + (W5 * b22)
Internally, the CS5378 uses normalized coeffi-
cients to perform the 2nd order IIR filter calcula-
tion, which changes the algorithm slightly. The
following characteristic equations model the oper-
ation of the 2nd order IIR filter when using normal-
ized coefficients.
W5 = W4
W4 = W3
W3 = 2 * [(X / 2) + (-a21 * W4) + (-a22 * W5)]
Y = 2 * [(W3 * b20) + (W4 * b21) + (W5 * b22)]
14.4 IIR3 Filter
The 3rd order IIR filter is implemented by running
both the 1st order and 2nd order IIR filter stages. It
can be modeled by cascading the characteristic
equations of the 1st order and 2nd order IIR stages.
14.5 On-Chip IIR Coefficients
Five sets of on-chip coefficients are available for
IIR1 and IIR2, each providing a 3 Hz high-pass
Butterworth response at different output word
rates. Characteristics of the on-chip coefficient sets
are described in Figure 31 and Table 16.
Which on-chip coefficient set to use is selected by
a data word following the `Write ROM Coeffi-
cients' configuration command. See "Filter Coef-
ficient Selection" on page 38 for information about
selecting on-chip coefficient sets.
14.6 Programmable IIR Coefficients
A maximum of 3 + 5 coefficients can be pro-
grammed into IIR1 and IIR2 to create a custom fil-
ter response. Custom filter sets should normalize
the coefficients to 24-bit two's complement full
scale, 0x7FFFFF. To maintain maximum internal
dynamic range, the CS5378 IIR filter performs
double precision calculations with an automatic
gain correction to scale the final output.
Custom IIR coefficients are uploaded using the
`Write IIR Coefficients' configuration command.
See "EEPROM Configuration Commands" on
page 27 or "Microcontroller Configuration Com-
mands" on page 33 for information about writing
custom IIR coefficients.
14.7 IIR Filter Synchronization
The IIR filter is not synchronized to the external
system directly, only indirectly through the syn-
chronization of the SINC and FIR filters. Because
IIR filters have `infinite' memory, a discontinuity
in the input data stream from a synchronization
event can require significant time to settle out. The
exact settling time depends on the size of the dis-
continuity and the filter coefficient characteristics.
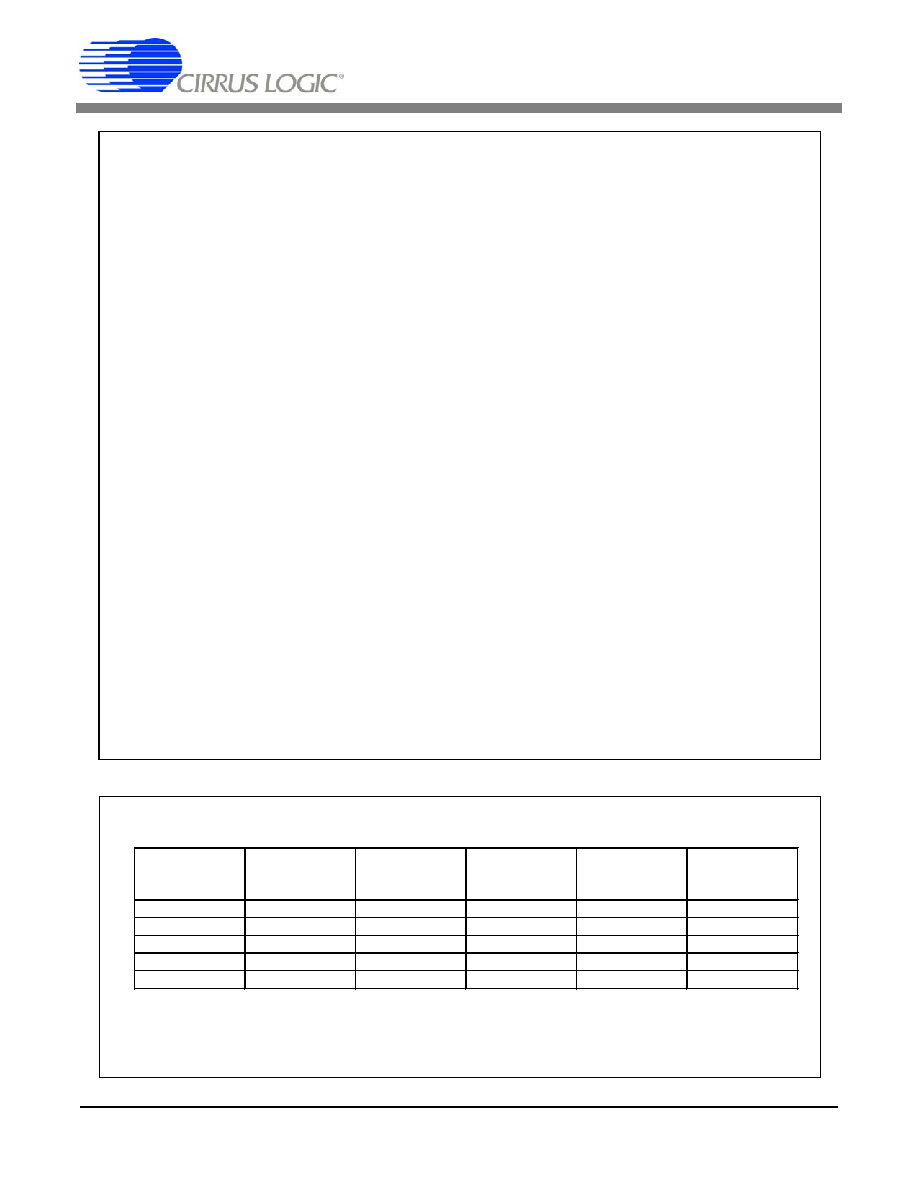
CS5378
DS639F1
54
IIR1 � Single stage, no decimation
1
st
order no decimation, 3 coefficients
Coefficient set 0: high-pass, corner 0.15% f
s
(3 Hz at 2000 SPS)
Coefficient set 1: high-pass, corner 0.30% f
s
(3 Hz at 1000 SPS)
Coefficient set 2: high-pass, corner 0.60% f
s
(3 Hz at 500 SPS)
Coefficient set 3: high-pass, corner 0.90% f
s
(3 Hz at 333 SPS)
Coefficient set 4: high-pass, corner 1.20% f
s
(3 Hz at 250 SPS)
IIR2 � Single stage, no decimation
2
nd
order no decimation, 5 coefficients
Coefficient set 0: high-pass, corner 0.15% f
s
(3 Hz at 2000 SPS)
Coefficient set 1: high-pass, corner 0.30% f
s
(3 Hz at 1000 SPS)
Coefficient set 2: high-pass, corner 0.60% f
s
(3 Hz at 500 SPS)
Coefficient set 3: high-pass, corner 0.90% f
s
(3 Hz at 333 SPS)
Coefficient set 4: high-pass, corner 1.20% f
s
(3 Hz at 250 SPS)
IIR3 � Two stage, no decimation
3
rd
order no decimation, 8 coefficients
(Combined IIR1 and IIR2 filter responses)
Coefficient set 0,0: high-pass, corner 0.20% f
s
(4 Hz at 2000 SPS)
Coefficient set 1,1: high-pass, corner 0.41% f
s
(4 Hz at 1000 SPS)
Coefficient set 2,2: high-pass, corner 0.82% f
s
(4 Hz at 500 SPS)
Coefficient set 3,3: high-pass, corner 1.22% f
s
(4 Hz at 333 SPS)
Coefficient set 4,4: high-pass, corner 1.63% f
s
(4 Hz at 250 SPS)
Figure 31. IIR Filter Stages
IIR filters
IIR1 Coeff
Selection
IIR1
Corner
Frequency
IIR2 Coeff
Selection
IIR2
Corner
Frequency
IIR3 Coeff
Selection
IIR3
Corner
Frequency
0 0.15%
f
s
0 0.15%
f
s
0,0
0.2041%
f
s
1 0.30%
f
s
1 0.30%
f
s
1,1
0.4074%
f
s
2 0.60%
f
s
2 0.60%
f
s
2,2
0.8152%
f
s
3 0.90%
f
s
3 0.90%
f
s
3,3
1.2222%
f
s
4 1.20%
f
s
4 1.20%
f
s
4,4
1.6293%
f
s
Table 16. IIR Filter Characteristics
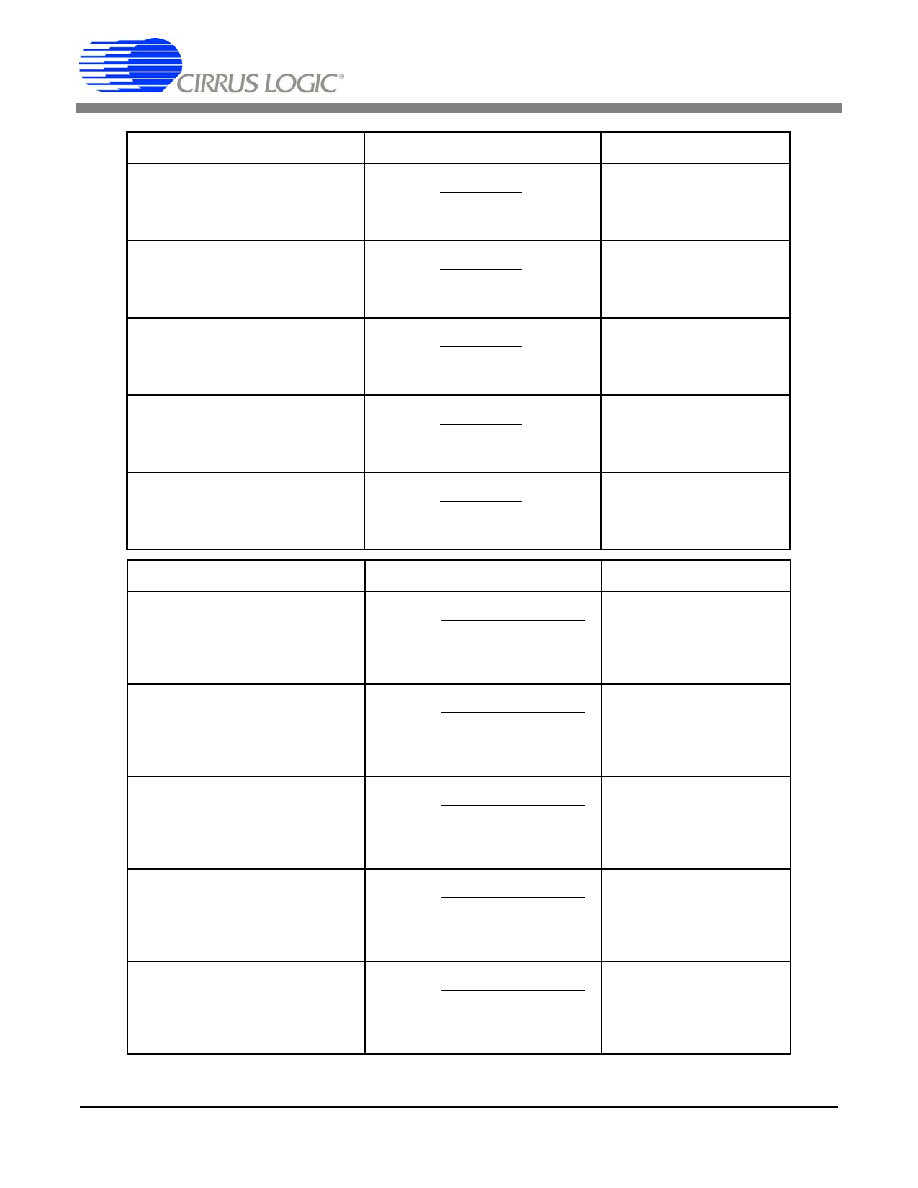
CS5378
DS639F1
55
Filter Type
System Function
Filter Coefficients
(normalized 24-bit)
IIR1 (Coefficient set 0)
1
st
order, high pass
Corner at 0.15% f
s
3 coefficients
+
+
=
-
-
1
11
1
11
10
1
)
(
z
a
z
b
b
z
H
a
11
= -8309916
b
10
= 8349262
b
11
= -8349262
IIR1 (Coefficient set 1)
1
st
order, high pass
Corner at 0.30% f
s
3 coefficients
+
+
=
-
-
1
11
1
11
10
1
)
(
z
a
z
b
b
z
H
a
11
= -8231957
b
10
= 8310282
b
11
= -8310282
IIR1 (Coefficient set 2)
1
st
order, high pass
Corner at 0.60% f
s
3 coefficients
+
+
=
-
-
1
11
1
11
10
1
)
(
z
a
z
b
b
z
H
a
11
= -8078179
b
10
= 8233393
b
11
= -8233393
IIR1 (Coefficient set 3)
1
st
order, high pass
Corner at 0.90% f
s
3 coefficients
+
+
=
-
-
1
11
1
11
10
1
)
(
z
a
z
b
b
z
H
a
11
= -7927166
b
10
= 8157887
b
11
= -8157887
IIR1 (Coefficient set 4)
1
st
order, high pass
Corner at 1.20% f
s
3 coefficients
+
+
=
-
-
1
11
1
11
10
1
)
(
z
a
z
b
b
z
H
a
11
= -7778820
b
10
= 8083714
b
11
= -8083714
Filter Type
System Function
Filter Coefficients
(normalized 24-bit)
IIR2 (Coefficient set 0)
2
nd
order, high pass
Corner at 0.15% f
s
5 coefficients
+
+
+
+
=
-
-
-
-
1
22
1
21
1
22
1
21
20
1
)
(
z
a
z
a
z
b
z
b
b
z
H
a
21
= -8332704
a
22
= 4138771
b
20
= 4166445
b
21
= -8332890
b
22
= 4166445
IIR2 (Coefficient set 1)
2
nd
order, high pass
Corner at 0.30% f
s
5 coefficients
+
+
+
+
=
-
-
-
-
1
22
1
21
1
22
1
21
20
1
)
(
z
a
z
a
z
b
z
b
b
z
H
a
21
= -8276806
a
22
= 4083972
b
20
= 4138770
b
21
= -8277540
b
22
= 4138770
IIR2 (Coefficient set 2)
2
nd
order, high pass
Corner at 0.60% f
s
5 coefficients
+
+
+
+
=
-
-
-
-
1
22
1
21
1
22
1
21
20
1
)
(
z
a
z
a
z
b
z
b
b
z
H
a
21
= -8165041
a
22
= 3976543
b
20
= 4083972
b
21
= -8167944
b
22
= 4083972
IIR2 (Coefficient set 3)
2
nd
Order, high pass
Corner at 0.90% f
s
5 coefficients
+
+
+
+
=
-
-
-
-
1
22
1
21
1
22
1
21
20
1
)
(
z
a
z
a
z
b
z
b
b
z
H
a
21
= -8053350
a
22
= 3871939
b
20
= 4029898
b
21
= -8059796
b
22
= 4029898
IIR2 (Coefficient set 4)
2
nd
order, high pass
Corner at 1.20% f
s
5 coefficients
+
+
+
+
=
-
-
-
-
1
22
1
21
1
22
1
21
20
1
)
(
z
a
z
a
z
b
z
b
b
z
H
a
21
= -7941764
a
22
= 3770088
b
20
= 3976539
b
21
= -7953078
b
22
= 3976539
Table 17. IIR Filter Coefficients

CS5378
DS639F1
56
15. GAIN AND OFFSET CORRECTION
The CS5378 digital filter can apply gain and offset
corrections to the measurement data. Also, an off-
set calibration algorithm can automatically calcu-
late the offset correction value.
A gain correction value is written to the GAIN reg-
isters (0x21), while an offset correction value is
written to the OFFSET register (0x25). Gain and
offset corrections are enabled by the USEGR and
USEOR bits in the FILTCFG register (0x20).
When enabled, the offset calibration algorithm will
automatically calculate an offset correction value
and write it into the OFFSET register. Offset cali-
bration is enabled by writing the EXP and ORCAL
bits in FILTCFG.
15.1 Gain Correction
Gain correction in the CS5378 normalizes sensor
gain in multi-sensor networks. It requires an exter-
nally calculated correction value to be written into
the GAIN register (0x21).
A gain correction value is 24-bit two's complement
with unity gain defined as full scale, 0x7FFFFF.
Gain correction always scales to a fractional value,
and can never gain the digital filter data greater
than one.
Output Value = Data * (GAIN / 0x7FFFFF)
Unity Gain: GAIN = 0x7FFFFF
50% Gain: GAIN = 0x3FFFFF
Zero Gain: GAIN = 0x000000
Once the GAIN register is written, the USEGR bit
in the FILTCFG register enables gain correction.
15.2 Offset Correction
Offset correction in the CS5378 cancels the DC
bias of a measurement channel by subtracting the
value in the OFFSET register (0x25) from the dig-
ital filter output data word.
An offset correction value is 24-bit two's comple-
ment with a maximum positive value of 0x7FFFFF,
Figure 32. Gain and Offset Correction
FIR
IIR
Filters
Filter
Output to High Speed Serial Data Port (SD Port)
Offset
Correction
Output Rate 4000 SPS ~ 1 SPS
SINC
Filter
MDI Input
512 kHz
Correction
Gain
Offset
Calibration

CS5378
DS639F1
57
and a maximum negative value of 0x800000. If ap-
plying an offset correction causes the final result to
exceed a 24-bit two's complement maximum, the
output data will saturate to that maximum value.
Output Data = Input Data - Offset Correction
Max Positive Output Value = 0x7FFFFF
Max Negative Output Value = 0x800000
Once the OFFSET register is written, the USEOR
bit in the FILTCFG register enables offset correc-
tion.
15.3 Offset Calibration
An offset calibration algorithm in the CS5378 can
automatically calculate an offset correction value.
When using the offset calibration algorithm, back-
ground noise data should be used as the input signal
for calculating the offset of the measurement chan-
nel.
The offset calibration algorithm is an exponential
averaging function that places increased weight on
more recent digital filter data. The exponential
weighting factor is set by the EXP bits in the
FILTCFG register, with larger exponent values
producing a smoother averaging function that re-
quires a longer settling time, and smaller values
producing a noisier averaging function that re-
quires a shorter settling time. Typical exponential
values range from 0x05 to 0x0F, depending on the
available settling time.
The characteristic equations of the offset calibra-
tion algorithm include an input value, X, an output
value, Y, a summation value, YSUM, a sample in-
dex, n, and an exponential value, EXP.
Y(n) = X(n) - [YSUM(n-1) >> EXP]
YSUM(n) = Y(n) + YSUM(n-1)
Offset Correction = YSUM >> EXP
Once the EXP bits are written, the ORCAL bit in
the FILTCFG register is set to enable offset calibra-
tion. When enabled, an updated offset correction
value is automatically written to the OFFSET reg-
ister. When the offset calibration algorithm is fully
settled, the ORCAL bit should be cleared to main-
tain the final value in the OFFSET register.
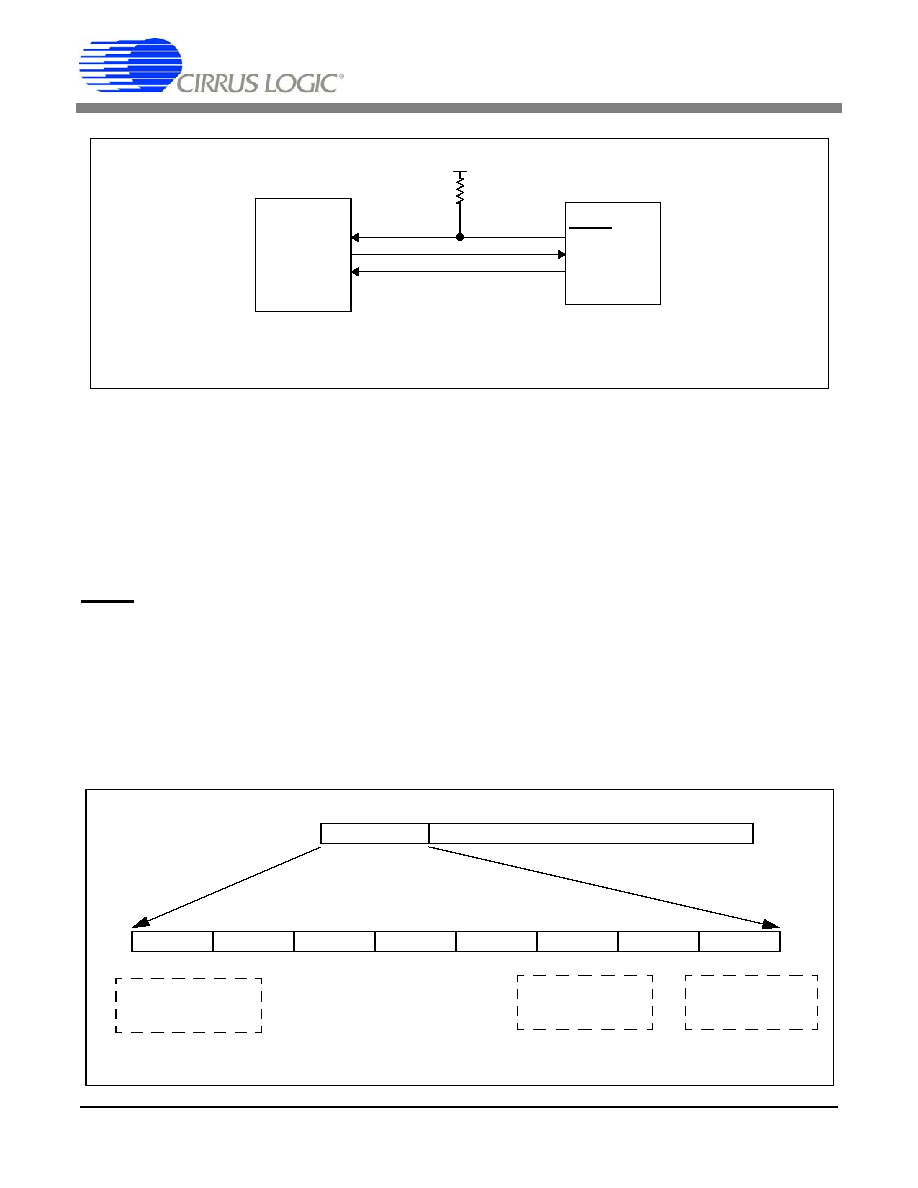
CS5378
DS639F1
58
16. SERIAL DATA INTERFACE
Once digital filtering is complete, each 24-bit out-
put sample is combined with an 8-bit status byte.
These data words are written to an 8-deep FIFO
buffer and then transmitted to the communications
channel through a high speed serial data interface.
16.1 Pin Descriptions
DRDY - Pin 23
Data ready output signal, active low. Open drain
output requiring an external pull-up resistor.
SCK - Pin 24
Serial clock input.
MISO - Pin 25
Serial data output.
16.2 Serial Data Format
Serial data transactions transfer either 24-bit data
words or 32-bit status+data words, depending on
the STAT bit in the CONFIG register. When trans-
mitting status information, each 8-bit status byte
has an MFLAG bit, a time break bit, and a FIFO
overflow bit encoded as shown in Figure 34.
MFLAG Bit - MFLAG
The MFLAG bit is set in the status byte when an
signal is received on the MFLAG pin. When re-
CS5378
Figure 33. Serial Data Interface Block Diagram
System Telemetry
MISO
DRDY
SCK
Data Ready
Data In
Clock Out
Data
Status
0
23
31
--
MFLAG
--
--
W
31
29
30
28
27
26
25
24
Figure 34. 32-bit Serial Data Format
TB
--
--
0 - Modulator Ok
1 - Modulator Error
0 - No Time Break
1 - Time Break
0 - FIFO Ok
1 - FIFO Overflow
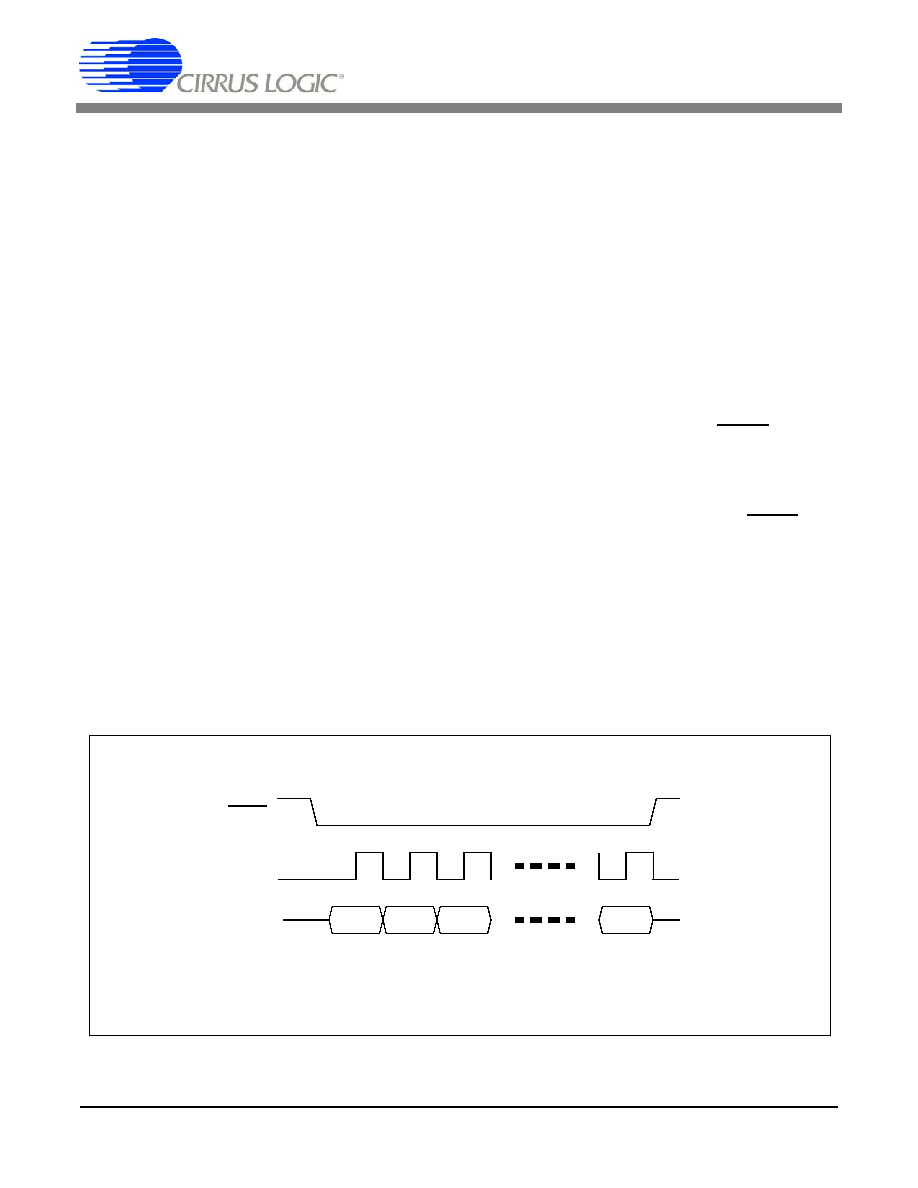
CS5378
DS639F1
59
ceived, the MFLAG bit is set in the next output
word. See "Modulator Interface" on page 36 for
more information about MFLAG.
Time Break Bit - TB
The time break bit marks a timing reference based
on a rising edge into the TIMEB pin. After a pro-
grammed delay, the TB bit in the status byte is set
for one output sample. The TIMEBRK digital fil-
ter register (0x29) programs the sample delay for
the TB bit output. See "Time Break Controller" on
page 63 for more information about time break.
FIFO Overflow Bit - W
The FIFO overflow bit indicates an error condition
in the serial data FIFO, and is set if new digital fil-
ter data overwrites a FIFO location containing data
which has not yet been sent.
The W bit is sticky, meaning it persists indefinitely
once set. Clearing the W bit requires sending the
`Filter Stop' and `Filter Start' configuration com-
mands to reinitialize the data FIFO.
Conversion Data Word
The lower 24-bits of the serial data word is the con-
version sample for the specified channel. Conver-
sion data is 24-bit two's complement format.
16.3 Serial Data Transactions
The CS5378 automatically initiates serial data
transactions whenever data becomes available in
the output FIFO by driving the DRDY pin low.
Once a serial data transaction is initiated, serial
clocks received into SCK cause data to be output to
MISO, as shown in Figure 35. When all available
data is read from the serial data FIFO, DRDY is re-
leased.
DRDY
SCK
MISO
Figure 35. SD Port Transaction
MSB
LSB
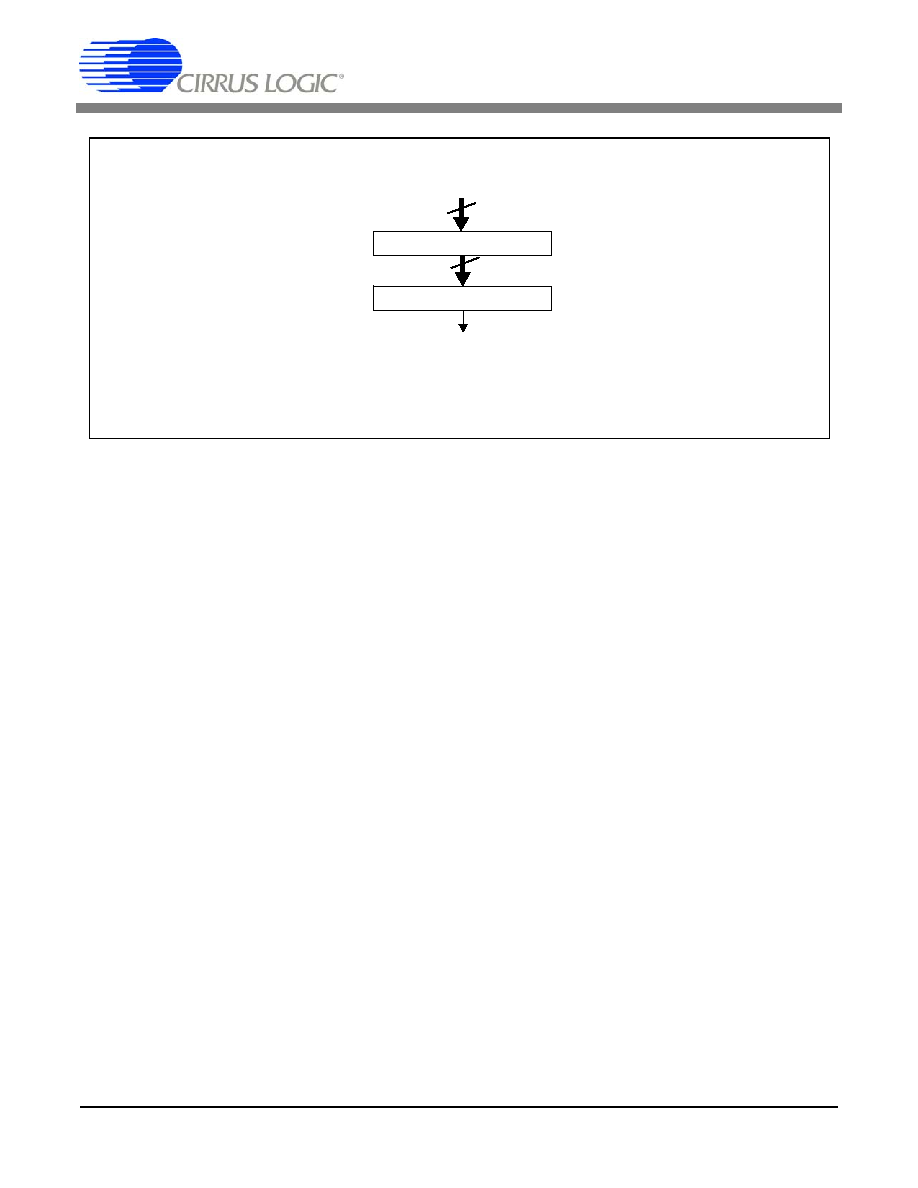
CS5378
DS639F1
60
17. TEST BIT STREAM GENERATOR
The CS5378 test bit stream (TBS) generator creates
sine wave or impulse
bit stream data to drive an
external test DAC. The TBS digital output can also
be internally connected to the MDATA inputs for
loopback testing of the digital filter.
17.1 Pin Descriptions
TBSDATA - Pin 8
Test bit stream 1-bit
data output.
MCLK - Pin 11
Test bit stream clock output.
17.2 TBS Architecture
The test bit stream generator consists of a data in-
terpolator and a digital
modulator. It receives
periodic 24-bit data from the digital filter to create
a 1-bit
data output on the TBSDATA pin.
The TBS input data from the digital filter is scaled
by the TBSGAIN register (0x2B). Maximum sta-
ble amplitude is 0x04FFFF, with 0x04B000 ap-
proximately full scale for the CS4373 test DAC.
The full scale 1-bit
output from the TBS gener-
ator is defined as 25% minimum and 75% maxi-
mum one's density.
17.3 TBS Configuration
Configuration options for the TBS generator are set
through the TBSCFG register (0x2A). Gain scal-
ing of the TBS generator output is set by the TB-
SGAIN register (0x2B).
Interpolation Factor - INTP[7:0]
Selects how many times the interpolator uses a data
point when generating the output bit stream. Inter-
polation is zero based and represents one greater
than the programmed register value.
Operational Mode - TMODE
Selects between sine wave or impulse output mode.
Output Rate - RATE[2:0]
Selects the TBSDATA output rate.
Synchronization - TSYNC
Enables synchronization of the TBS output phase
to the MSYNC signal.
Loopback - LOOP
Enables digital loopback from the TBS output to
the MDATA inputs.
Digital
Modulator
24-bit
1-bit
TBSDATA
Digital Filter
TBSGAIN Register
24-bit
Figure 36. Test Bit Stream Generator Block Diagram
Data Bus
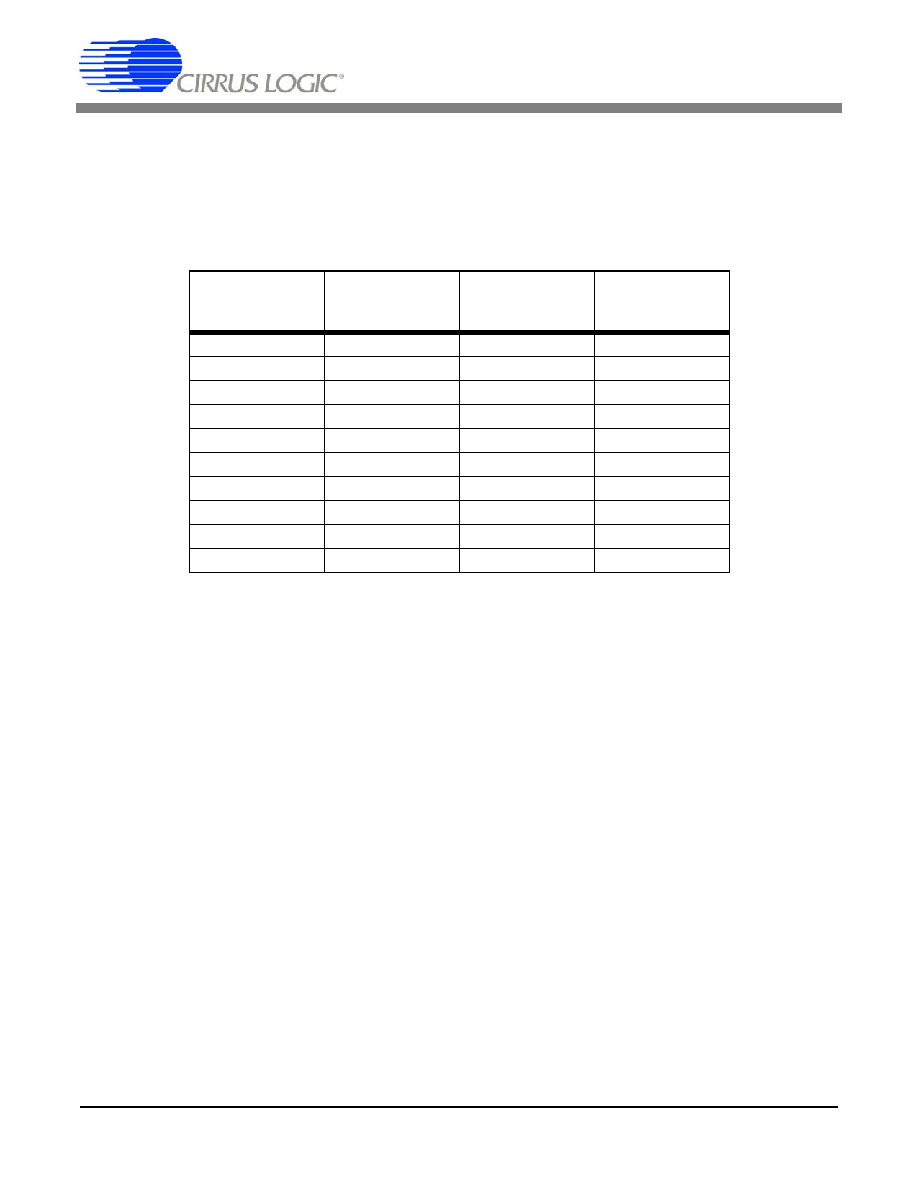
CS5378
DS639F1
61
Run - RUN
Enables the test bit stream generator.
Data Delay - DDLY[5:0]
Programs full period delays for TBSDATA, up to a
maximum of 63 bits.
Gain - TBSGAIN[23:0]
Scales the amplitude of the sine wave output and
generated impulse. Maximum 0x04FFFF, nominal
0x04B000.
17.4 TBS Data Source
An on-chip 24-bit 1024 point digital sine wave is
stored on the CS5378 which will produce the test
signal frequencies listed in Table 18. Additional
discrete test frequencies and output rates can be
programmed by varying the interpolation factor
and output rate.
17.5 TBS Sine Wave Output
When the TMODE bit in the TBSCFG register is
low, the TBS generator operates in sine wave
mode. In this mode, sine wave data from digital fil-
ter memory is used to create a sine wave test signal
that can drive a test DAC. Sine wave frequency
and output data rate are calculated as shown by the
characteristic equation of Table 18.
The sine wave maximum
one's density output
from the TBS generator is set by the TBSGAIN
register. TBSGAIN can be programmed up to a
maximum of 0x04FFFF, with the TBS generator
unstable for higher amplitudes. For the CS4373
test DAC, a gain value of 0x04B000 produces an
approximately full scale sine wave output (5 V
pp
differential).
Test Bit Stream Characteristic Equation:
(Signal Freq) * (# TBS Data) * (Interpolation + 1) = Output Rate
Example:
(31.25 Hz) * (1024) * (0x07 + 1) = 256 kHz
Signal
Frequency
(TBSDATA)
Output
Rate
(TBSCLK)
Output Rate
Selection
(RATE)
Interpolation
Selection
(INTP)
10.00 Hz
256 kHz
0x4
0x18
10.00 Hz
512 kHz
0x5
0x31
25.00 Hz
256 kHz
0x4
0x09
25.00 Hz
512 kHz
0x5
0x13
31.25 Hz
256 kHz
0x4
0x07
31.25 Hz
512 kHz
0x5
0x0F
50.00 Hz
256 kHz
0x4
0x04
50.00 Hz
512 kHz
0x5
0x09
125.00 Hz
256 kHz
0x4
0x01
125.00 Hz
512 kHz
0x5
0x03
Table 18. TBS Configurations Using On-chip Data

CS5378
DS639F1
62
17.6 TBS Impulse Output
If the TMODE bit in TBSCFG is set high, the TBS
generator operates in impulse mode. In this mode,
the value in TBSGAIN sets the amplitude of the
generated impulse. Impulse amplitude and period
are shown in Table 19.
To create a maximum impulse from the TBS gen-
erator, the TBSGAIN register should be set to
0x04FFFF, and the INTP bits in TBSCFG should
also be set to 0xFF. The RATE bits should always
be set to produce data at the correct rate for the in-
tended test DAC.
A rising edge on the TIMEB pin triggers the im-
pulse output. When impulse mode is enabled but
no TIMEB input is received, the TBS generator
uses a negated TBSGAIN register as a repetitive in-
put value. When a rising edge is recognized on the
TIMEB pin, a single positive TBSGAIN value is
written to the TBS generator to create the impulse.
17.7 TBS Loopback Testing
Included as part of the CS5378 test bit stream gen-
erator is a feedback path to the digital filter MDA-
TA input. This loopback mode provides a fully
digital signal path to test the TBS generator, digital
filter, and data collection interface. Digital loop-
back testing expects 512 kHz
data into the
MDATA input.
A mismatch of the TBS generator full scale output
and the MDATA full scale input results in an am-
plitude mismatch when testing in loopback mode.
The TBS generator outputs a 75% maximum one's
density, while the MDATA inputs expect an 86%
maximum one's density from a
modulator, re-
sulting in a measured full scale error of approxi-
mately -3.6 dB.
17.8 TBS Synchronization
When the TSYNC bit is set in the TBSCFG regis-
ter, the MSYNC signal resets the sine wave data
pointer and phase aligns the TBS signal output.
Once the digital filter is settled, all CS5378 devices
receiving the SYNC signal will have identical TBS
signal phase. See "Synchronization" on page 24
for more information about the SYNC and
MSYNC signals.
If TSYNC is clear, MSYNC has no effect on the
TBS data pointer and no change in the TBS output
phase will occur during synchronization.
Test Bit Stream Impulse Characteristics:
Interpolation
Selection
(INTP)
Output Rate
Selection
(RATE)
Pulse Width
from CS4373
Gain Scale
Factor
(TBSGAIN)
Pulse Height
from CS4373
0xFF
0x5
500
�s
0x04B000
~ 860 mV
0xFF
0x4
1 ms
0x04B000
~ 820 mV
0xFF
0x3
2 ms
0x04B000
~ 820 mV
0x7F
0x5
250
�s
0x04B000
~ 820 mV
0x7F
0x4
500
�s
0x04B000
~ 820 mV
0x7F
0x3
1 ms
0x04B000
~ 820 mV
Table 19. TBS Impulse Characteristics
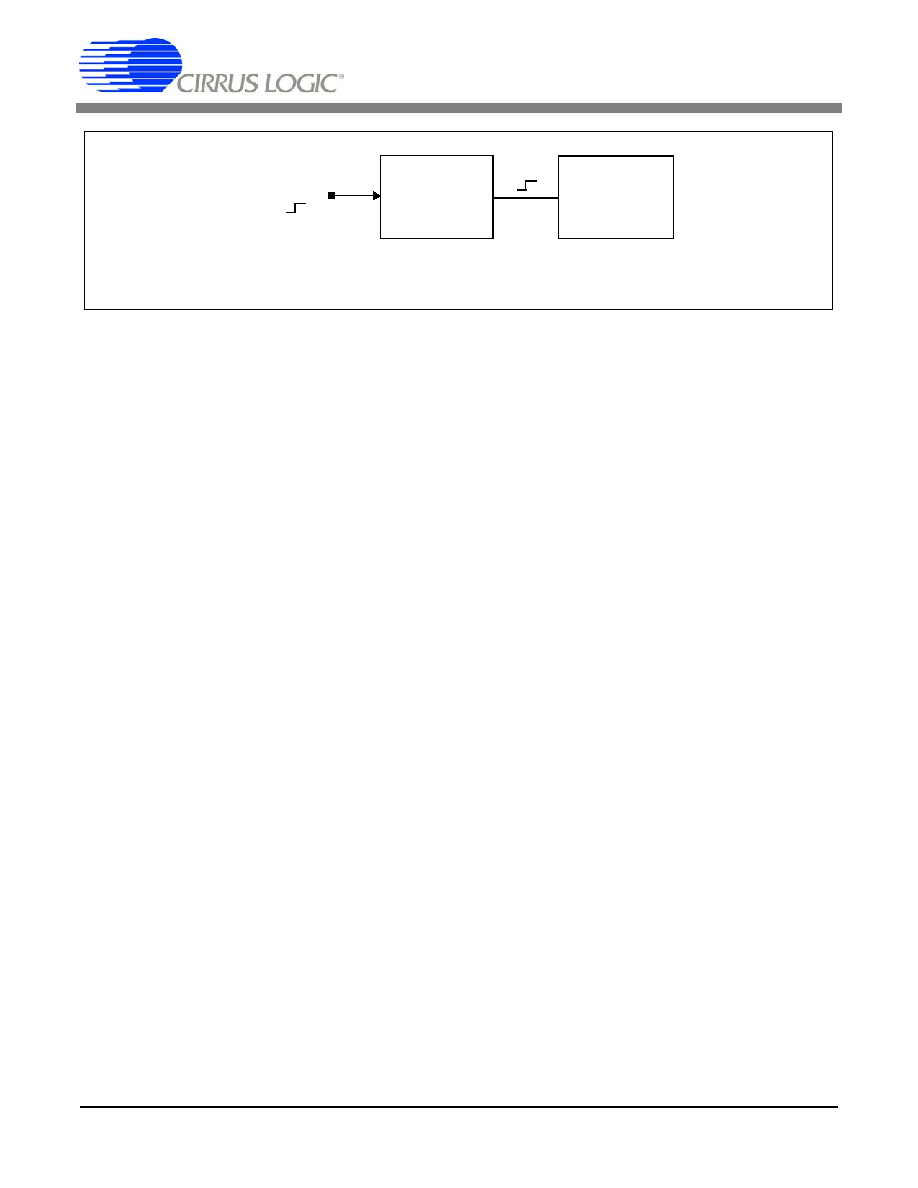
CS5378
DS639F1
63
18. TIME BREAK CONTROLLER
A time break signal is used to mark timing events
that occur during measurement. An external signal
sets a flag in the status byte of an output sample to
mark when the external event occurred.
A rising edge input to the TIMEB pin causes the
TB timing reference flag to be set in the serial data
status byte. When set, the TB flag appears for only
one output sample in the status byte. The TB flag
output can be delayed by programming a sample
delay value into the TIMEBRK digital filter regis-
ter.
18.1 Pin Description
TIMEB - Pin 20
Time break input pin, rising edge triggered.
18.2 Time Break Operation
An externally generated timing reference signal ap-
plied to the TIMEB pin initiates an internal sample
counter. After a number of output samples have
passed, programmed in the TIMEBRK digital filter
register (0x29), the TB flag is set in the status byte
of the serial data output word. The TB flag is auto-
matically cleared for subsequent data words, and
appears for only one output sample.
18.3 Time Break Delay
The TIMEBRK register (0x29) sets a sample delay
between a received rising edge on the TIMEB pin
and writing the TB flag into the serial data status
byte.
The programmable sample counter can compensate
for group delay through the digital filters. When the
proper group delay value is programmed into the
TIMEBRK register, the TB flag will be set in the
status byte of the measurement sample taken when
the timing reference signal was received.
18.3.1 Step Input and Group Delay
A simple method to empirically measure the step
response and group delay of a CS5378 measure-
ment channel is to use the time break signal as both
a timing reference input and an analog step input.
When a rising edge is received on the TIMEB pin
with no delay programmed into the TIMEBRK reg-
ister, the TB flag is set in the next serial data status
byte. The same rising edge can act as a step input
to the analog channel, propagating through the dig-
ital filter to appear as a rising edge in the measure-
ment data. By comparing the timing of the TB
status flag output and the rising edge in the mea-
surement data, the measurement channel group de-
lay can be determined.
TIMEB
in Serial Data
Status Byte
Delay Counter
TIMEBRK
TB Flag
Figure 37. Time Break Block Diagram
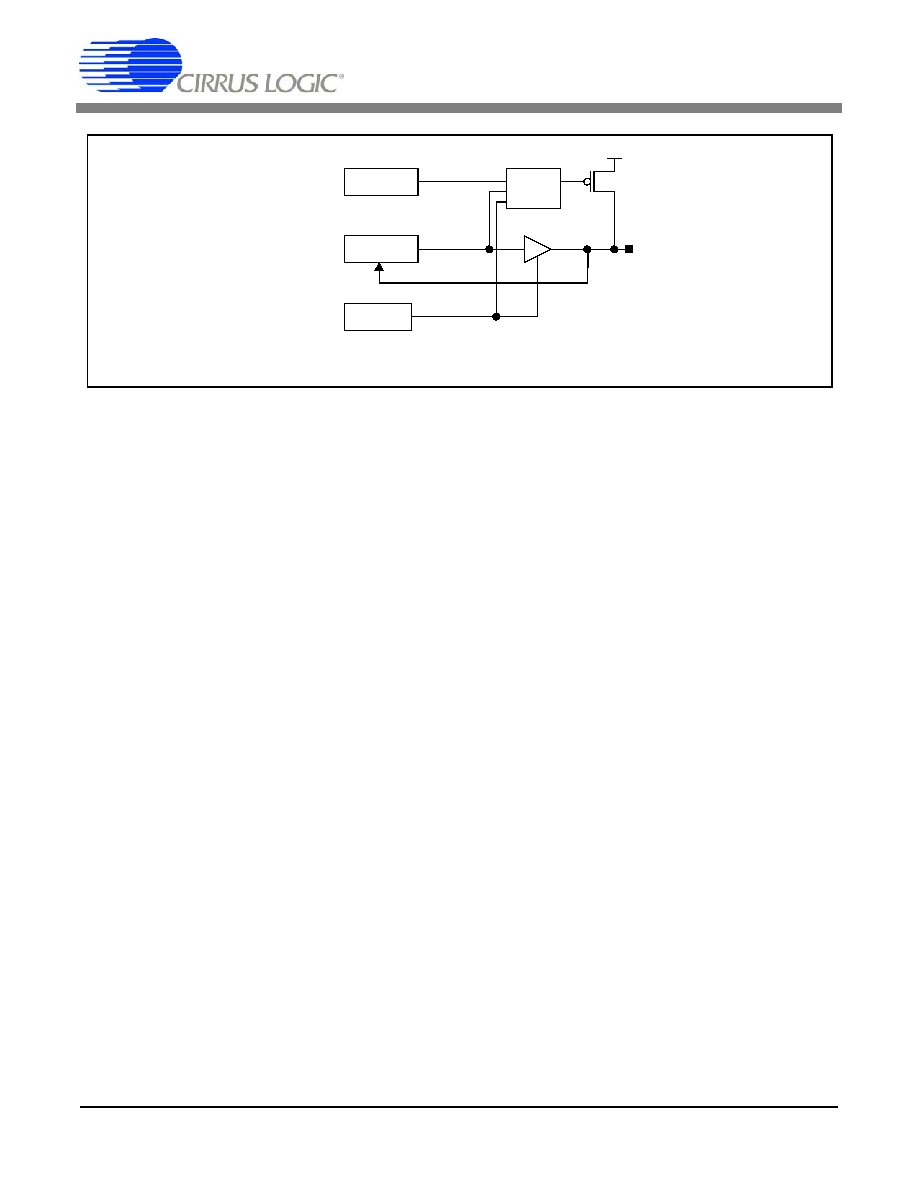
CS5378
DS639F1
64
19. GENERAL PURPOSE I/O
The General Purpose I/O (GPIO) block provides 8
general purpose pins to interface with external
hardware.
19.1 Pin Descriptions
GPIO[3:0] - Pins 4 - 1
Standard GPIO pins.
GPIO[6:4]:PLL[2:0] - Pins 7 - 5
Standard GPIO pins also used to select the PLL
mode after reset. Internal pull-ups default high,
10 k
external pull-downs required to set low.
GPIO7:BOOT - Pin 28
Standard GPIO pin also used to select boot mode
after reset. Internal pull-up defaults high, 10 k
ex-
ternal pull-down required to set low.
19.2 GPIO Architecture
Each GPIO pin can be configured as input or out-
put, high or low, with a weak (~100 k
) internal
pull-up resistor enabled or disabled. Figure 38
shows the structure of a bi-directional GPIO pin.
19.3 GPIO Registers
GPIO pin settings are programmed in the GPCFG
register. GP_DIR bits set the input/output mode,
GP_PULL bits enable/disable the internal pull-up
resistor, and GP_DATA bits set the output data val-
ue. After reset, GPIO pins default as inputs with
pull-up resistors enabled.
19.4 GPIO Input Mode
When reading a value from the GP_DATA bits, the
returned data reports the current state of the pins. If
a pin is externally driven high it reads a logical 1, if
externally driven low it reads a logical 0. When a
GPIO pin is used as an input, the pull-up resistor
should be disabled to save power if it isn't required.
19.5 GPIO Output Mode
When a GPIO pin is programmed as an output with
a data value of 0, the pin is driven low and the in-
ternal pull-up resistor is automatically disabled.
When programmed as an output with a data value
of 1, the pin is driven high and the pull-up resistor
is inconsequential.
Any GPIO pin can be used as an open-drain output
by setting the data value to 0, enabling the pull-up,
and using the GP_DIR direction bits to control the
pin value. This open-drain output configuration
uses the internal pull-up resistor to hold the pin
high when GP_DIR is set as an input, and drives the
pin low when GP_DIR is set as an output.
Figure 38. GPIO Block Diagram
GPIO
GP_DIR
GP_DATA
GP_PULL
Pull Up
Logic
R

CS5378
DS639F1
65
19.5.1 GPIO Reads in Output Mode
When reading GPIO pins the GP_DATA register
value always reports the current state of the pins, so
a value written in output mode does not necessarily
read back the same value. If a pin in output mode is
written as a logical 1, the CS5378 attempts to drive
the pin high. If an external device forces the pin
low, the read value reflects the pin state and returns
a logical 0. Similarly, if an output pin is written as
a logical 0 but forced high externally, the read val-
ue reflects the pin state and returns a logical 1. In
both cases the CS5378 is in contention with the ex-
ternal device resulting in increased power con-
sumption.

CS5378
DS639F1
66
20. REGISTER SUMMARY
20.1 SPI Registers
The CS5378 SPI registers interface the serial port to the digital filter.
Name
Addr.
Type
# Bits
Description
SPICTRLH
00
R/W
8
SPI Control Register, High Byte
SPICTRLM
01
R/W
8
SPI Control Register, Middle Byte
SPICTRLL
02
R/W
8
SPI Control Register, Low Byte
SPICMDH
03
R/W
8
SPI Command, High Byte
SPICMDM
04
R/W
8
SPI Command, Middle Byte
SPICMDL
05
R/W
8
SPI Command, Low Byte
SPIDAT1H
06
R/W
8
SPI Data 1, High Byte
SPIDAT1M
07
R/W
8
SPI Data 1, Middle Byte
SPIDAT1L
08
R/W
8
SPI Data 1, Low Byte
SPIDAT2H
09
R/W
8
SPI Data 2, High Byte
SPIDAT2M
0A
R/W
8
SPI Data 2, Middle Byte
SPIDAT2L
0B
R/W
8
SPI Data 2, Low Byte
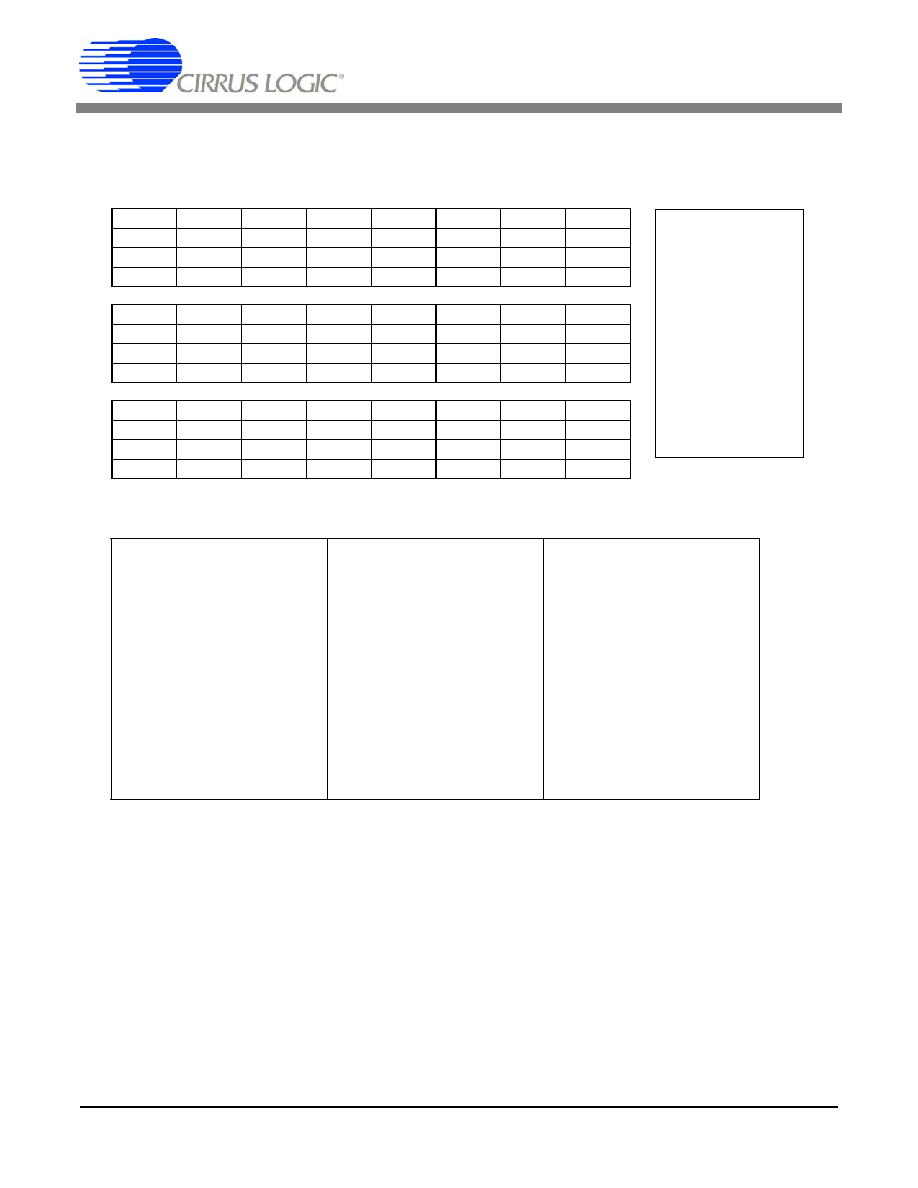
CS5378
DS639F1
67
20.1.1
SPICTRL : 0x00, 0x01, 0x02
(MSB) 23
22
21
20
19
18
17
16
--
--
--
--
--
--
--
--
R/W
R/W1
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
1
0
1
1
15
14
13
12
11
10
9
8
SMODF
--
--
EMOP
SWEF
--
--
E2DREQ
R
R/W
R
R
R
R/W
R/W
R/W
0
0
0
0
0
0
1
0
7
6
5
4
3
2
1
(LSB) 0
--
--
--
--
--
--
--
--
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
1
0
0
0
0
0
SPI Address: 0x00
0x01
0x02
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Bit definitions:
23:16 --
reserved
15
SMODF
SPI mode fault flag
7:0
--
reserved
14:13 --
reserved
12
EMOP
External master to SPI
operation in progress
flag
11
SWEF
SPI write collision error
flag
10:9
--
reserved
8
E2DREQ External master to digital
filter request flag
Figure 39. SPI Control Register SPICTRL

CS5378
DS639F1
68
20.1.2
SPICMD : 0x03, 0x04, 0x05
(MSB) 23
22
21
20
19
18
17
16
SCMD23
SCMD22
SCMD21
SCMD20
SCMD19
SCMD18
SCMD17
SCMD16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
SCMD15
SCMD14
SCMD13
SCMD12
SCMD11
SCMD10
SCMD9
SCMD8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
SCMD7
SCMD6
SCMD5
SCMD4
SCMD3
SCMD2
SCMD1
SCMD0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
SPI Address: 0x03
0x04
0x05
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 40. SPI Command Register SPICMD
Bit definitions:
23:16 SCMD[23:16] SPI Command High
Byte
15:8
SCMD[15:8]
SPI Command Mid-
dle Byte
15:8
SCMD[7:0]
SPI Command
Low Byte
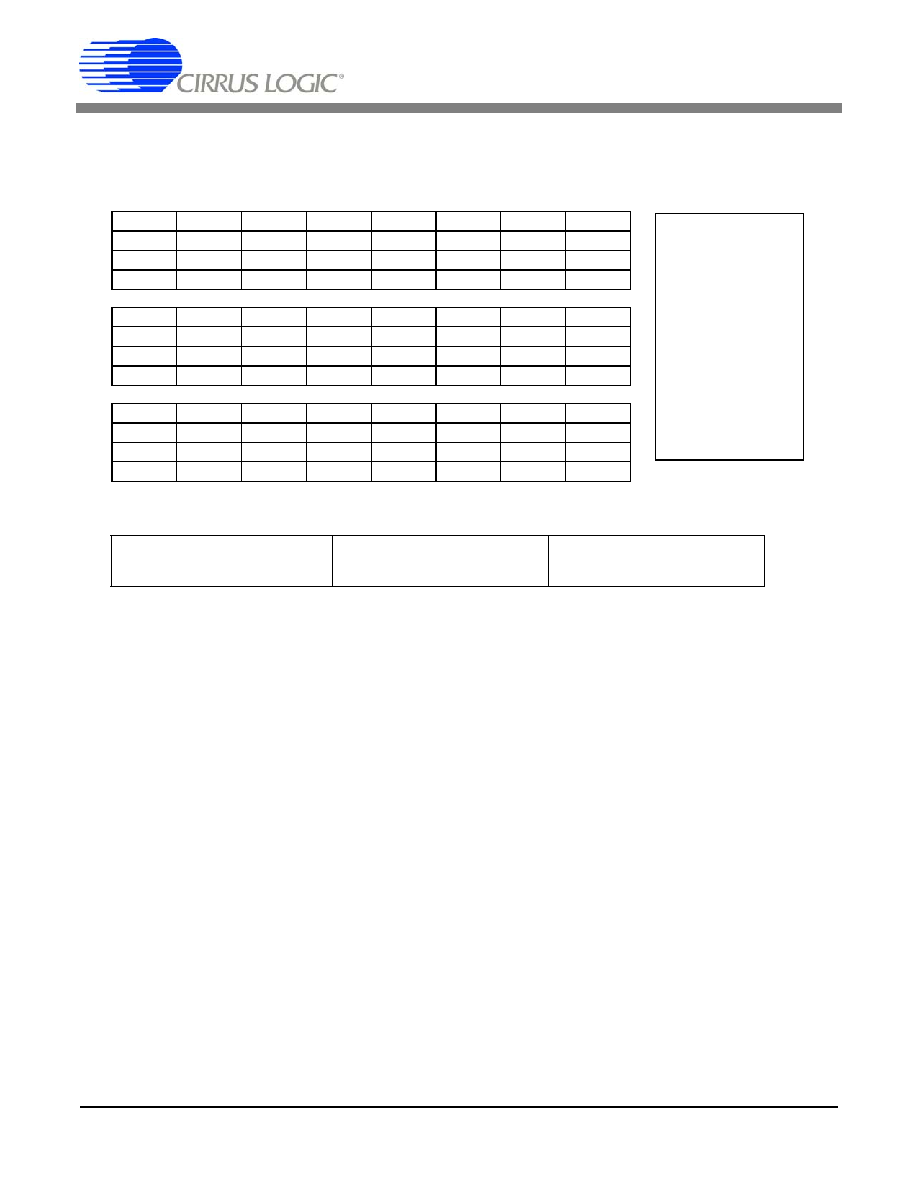
CS5378
DS639F1
69
20.1.3
SPIDAT1 : 0x06, 0x07, 0x08
(MSB) 23
22
21
20
19
18
17
16
SDAT23
SDAT22
SDAT21
SDAT20
SDAT19
SDAT18
SDAT17
SDAT16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
SDAT15
SDAT14
SDAT13
SDAT12
SDAT11
SDAT10
SDAT9
SDAT8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
SDAT7
SDAT6
SDAT5
SDAT4
SDAT3
SDAT2
SDAT1
SDAT0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
SPI Address: 0x06
0x07
0x08
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 41. SPI Data Register SPIDAT1
Bit definitions:
23:16 SDAT[23:16] SPI Data
High Byte
15:8
SDAT[15:8] SPI Data
Middle Byte
15:8
SDAT[7:0]
SPI Data
Low Byte
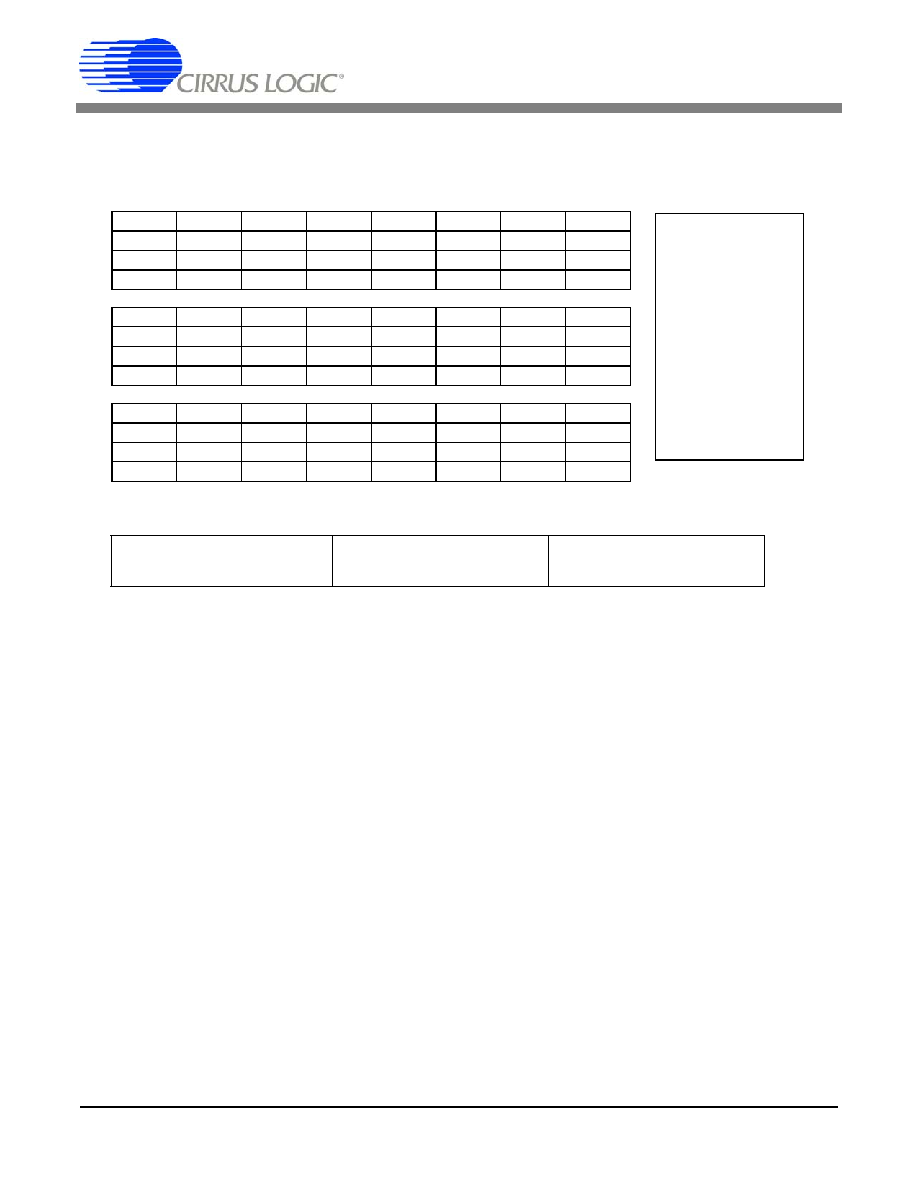
CS5378
DS639F1
70
20.1.4
SPIDAT2 : 0x09, 0x0A, 0x0B
(MSB) 23
22
21
20
19
18
17
16
SDAT23
SDAT22
SDAT21
SDAT20
SDAT19
SDAT18
SDAT17
SDAT16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
SDAT15
SDAT14
SDAT13
SDAT12
SDAT11
SDAT10
SDAT9
SDAT8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
SDAT7
SDAT6
SDAT5
SDAT4
SDAT3
SDAT2
SDAT1
SDAT0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
SPI Address: 0x09
0x0A
0x0B
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 42. SPI Data Register SPIDAT2
Bit definitions:
23:16 SDAT[23:16] SPI Data
High Byte
15:8
SDAT[15:8] SPI Data
Middle Byte
15:8
SDAT[7:0]
SPI Data
Low Byte

CS5378
DS639F1
71
20.2 Digital Filter Registers
The CS5378 digital filter registers control hardware peripherals and filtering functions.
Name
Addr.
Type
# Bits
Description
CONFIG
00
R/W
24
Hardware Configuration
RESERVED
01-0D
R/W
24
Reserved
GPCFG
0E
R/W
24
GPIO[7:0] Direction, Pull-Up Enable, and Data
RESERVED
0F-1F
R/W
24
Reserved
FILTCFG
20
R/W
24
Digital Filter Configuration
GAIN
21
R/W
24
Gain Correction
RESERVED
22-24
R/W
24
Reserved
OFFSET
25
R/W
24
Offset Correction
RESERVED
26-28
R/W
24
Reserved
TIMEBRK
29
R/W
24
Time Break Delay
TBSCFG
2A
R/W
24
Test Bit Stream Configuration
TBSGAIN
2B
R/W
24
Test Bit Stream Gain
SYSTEM1
2C
R/W
24
User Defined System Register 1
SYSTEM2
2D
R/W
24
User Defined System Register 2
VERSION
2E
R/W
24
Hardware Version ID
SELFTEST
2F
R/W
24
Self-Test Result Code

CS5378
DS639F1
72
20.2.1
CONFIG : 0x00
(MSB)23
22
21
20
19
18
17
16
--
--
--
--
--
DFS2
DFS1
DFS0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
1
0
1
15
14
13
12
11
10
9
8
--
--
--
--
--
MCKFS2
MCKFS1
MCKFS0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
1
0
0
7
6
5
4
3
2
1
(LSB)0
STAT
--
MCKEN2
MCKEN
MDIFS
--
BOOT
MSEN
R/W
R/W
R/W
R/W
R/W
R/W
R
R/W
0
0
0
0
0
0
0
1
Figure 43. Hardware Configuration Register CONFIG
Bit definitions:
23:19 --
reserved
15:11 --
reserved
7:6
STAT
Serial Data Status Byte
1: Disabled (24-bit output)
0: Enabled (32-bit output)
18:16 DFS
[2:0]
Digital filter
frequency select
111: Reserved
110: 8.192 MHz
101: 4.096 MHz
100: 2.048 MHz
011: 1.024 MHz
010: 512 kHz
001: 256 kHz
000: 32 kHz
10:8
MCKFS
[2:0]
MCLK frequency select
111: reserved
110: reserved
101: 4.096 MHz
100: 2.048 MHz
011: 1.024 MHz
010: 512 kHz
001: reserved
000: reserved
5
MCKEN2
MCLK/2 output enable
1: Enabled
0: Disabled
4
MCKEN
MCLK output enable
1: Enabled
0: Disabled
3
MDIFS
MDATA input frequency
select
1: 256 kHz
0: 512 kHz
2
--
reserved
1
BOOT
Boot source indicator
1: Booted from EEPROM
0: Booted from Micro
0
MSEN
MSYNC enable
1: MSYNC generated
0: MSYNC remains low
DF Address: 0x00
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
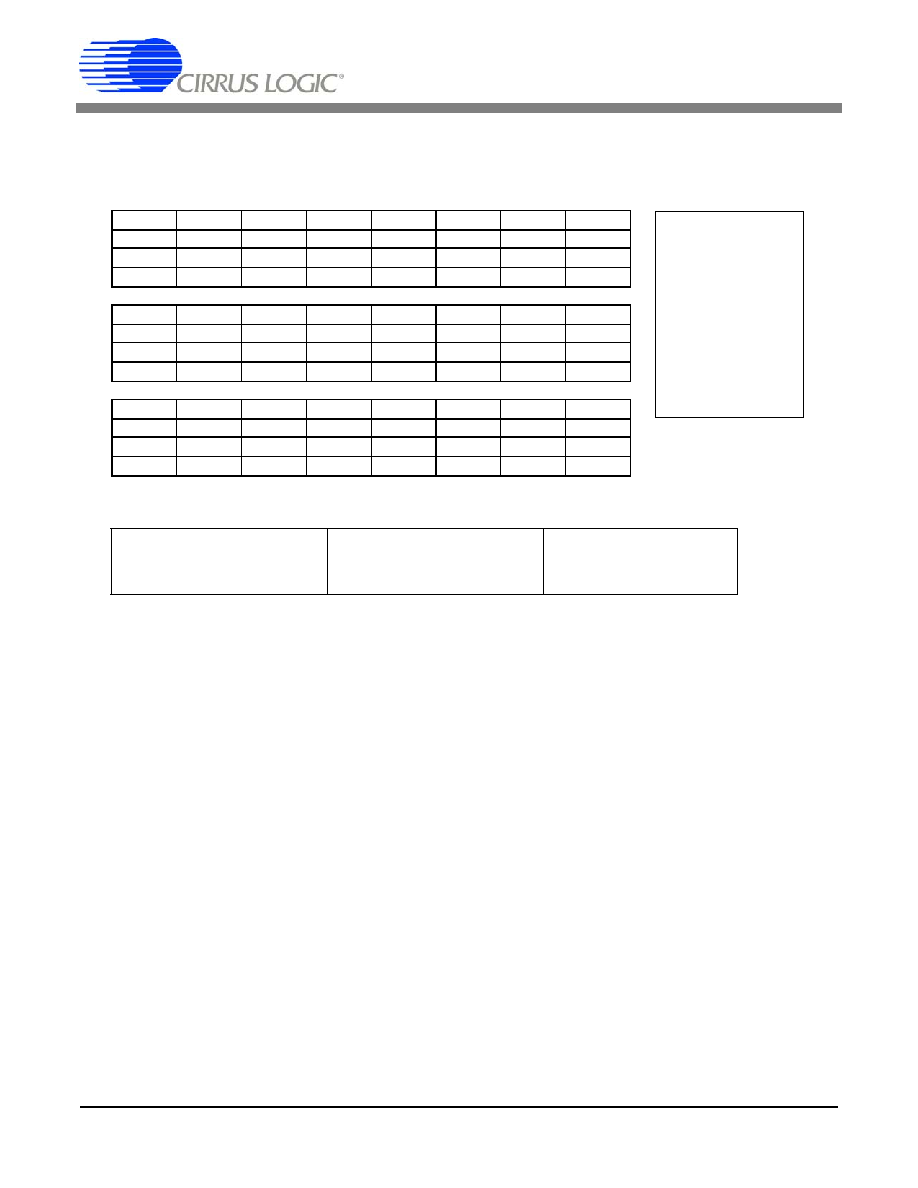
CS5378
DS639F1
73
20.2.2
GPCFG : 0x0E
(MSB) 23
22
21
20
19
18
17
16
GP_DIR7
GP_DIR6
GP_DIR5
GP_DIR4
GP_DIR3
GP_DIR2
GP_DIR1
GP_DIR0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
GP_PULL7
GP_PULL6
GP_PULL5
GP_PULL4
GP_PULL3
GP_PULL2
GP_PULL1
GP_PULL0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
1
1
1
1
1
1
1
1
7
6
5
4
3
2
1
(LSB) 0
GP_DATA7
GP_DATA6
GP_DATA5
GP_DATA4
GP_DATA3
GP_DATA2
GP_DATA1
GP_DATA0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
1
1
1
1
1
1
1
1
DF Address: 0x0E
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Bit definitions:
Notes:
GPIO[7] also used as BOOT mode select after reset
GPIO[6:4] also used as PLL mode select after reset.
23:16 GP_DIR
[7:0]
GPIO pin direction
1: Output
0: Input
15:8
GP_PULL
[7:0]
GPIO pullup resistor
1: Enabled
0: Disabled
7:0
GP_DATA
[7:0]
GPIO data value
1: VDD
0: GND
Figure 44. GPIO Configuration Register GPCFG
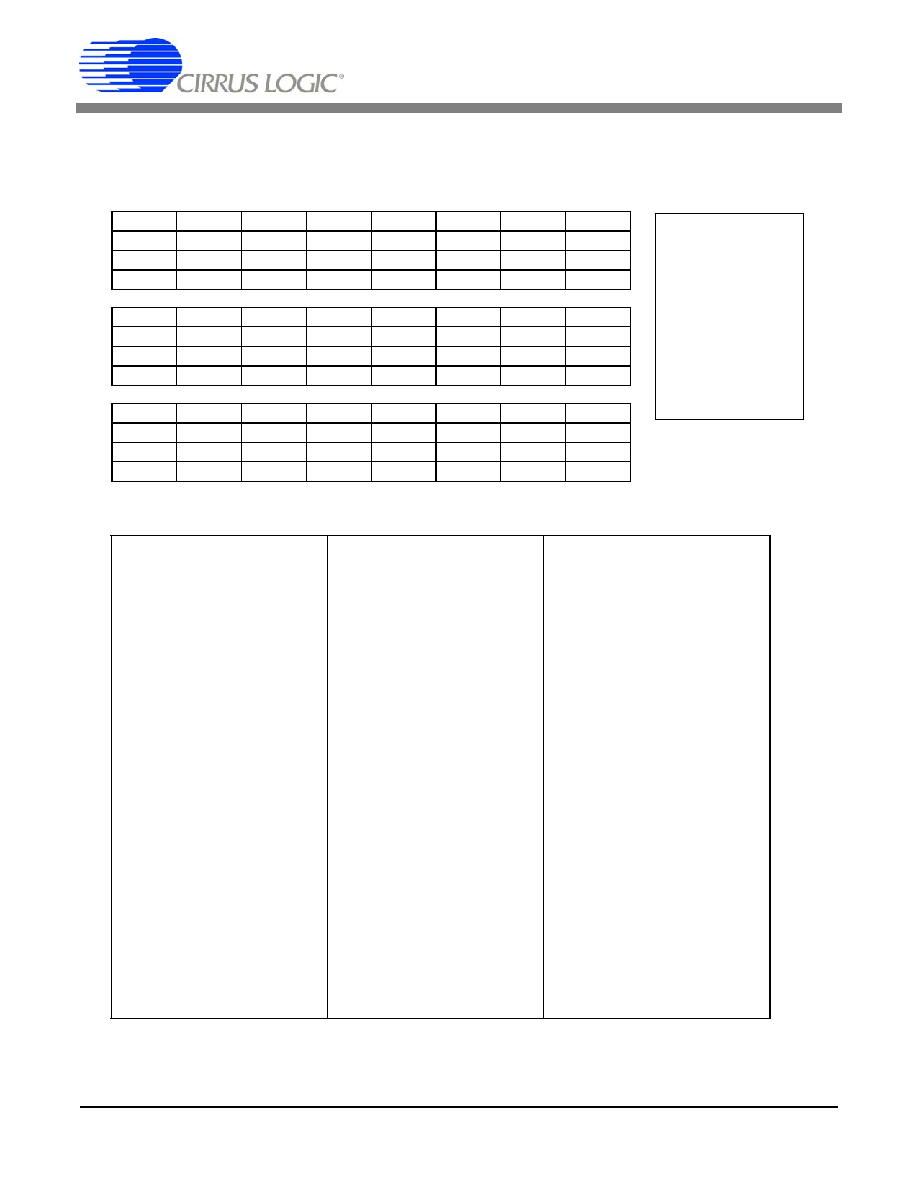
CS5378
DS639F1
74
20.2.3
FILTCFG : 0x20
(MSB) 23
22
21
20
19
18
17
16
--
--
--
EXP4
EXP3
EXP2
EXP1
EXP0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
--
ORCAL
USEOR
USEGR
--
FSEL2
FSEL1
FSEL0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
DEC3
DEC2
DEC1
DEC0
--
--
--
--
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
DF Address: 0x20
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Bit definitions:
23:21 --
reserved
15
--
reserved
7:4
DEC[3:0]
Decimation selection
(Output word rate)
20:16 EXP[4:0] OFFSET calibration
exponent
14
ORCAL
Run OFFSET calibration
1: Enable
0: Disable
0111: 4000 SPS
0110: 2000 SPS
0101: 1000 SPS
0100: 500 SPS
0011: 333 SPS
13
USEOR
Use OFFSET correction
1: Enable
0: Disable
0010: 250 SPS
0001: 200 SPS
0000: 125 SPS
1111: 100 SPS
1110: 50 SPS
12
USEGR
Use GAIN correction
1: Enable
0: Disable
1101: 40 SPS
1100: 25 SPS
1011: 20 SPS
1010: 10 SPS
1001: 5 SPS
1000: 1 SPS
11
--
reserved
3:0
--
reserved
10:8
FSEL[2:0] Output filter stage select
111: reserved
110: reserved
101: IIR 3rd Order
100: IIR 2nd Order
011: IIR 1st Order
010: FIR2 Output
001: FIR1 Output
000: SINC Output
Figure 45. Filter Configuration Register FILTCFG

CS5378
DS639F1
75
20.2.4
GAIN : 0x21
(MSB) 23
22
21
20
19
18
17
16
GAIN23
GAIN22
GAIN21
GAIN20
GAIN19
GAIN18
GAIN17
GAIN16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
GAIN15
GAIN14
GAIN13
GAIN12
GAIN11
GAIN10
GAIN9
GAIN8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
GAIN7
GAIN6
GAIN5
GAIN4
GAIN3
GAIN2
GAIN1
GAIN0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
DF Address: 0x21
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 46. Gain Correction Register GAIN
Bit definitions:
23:16 GAIN[23:16] Gain Correction
Upper Byte
15:8
GAIN[15:8] Gain Correction
Middle Byte
15:8
GAIN[7:0]
Gain Correction
Lower Byte
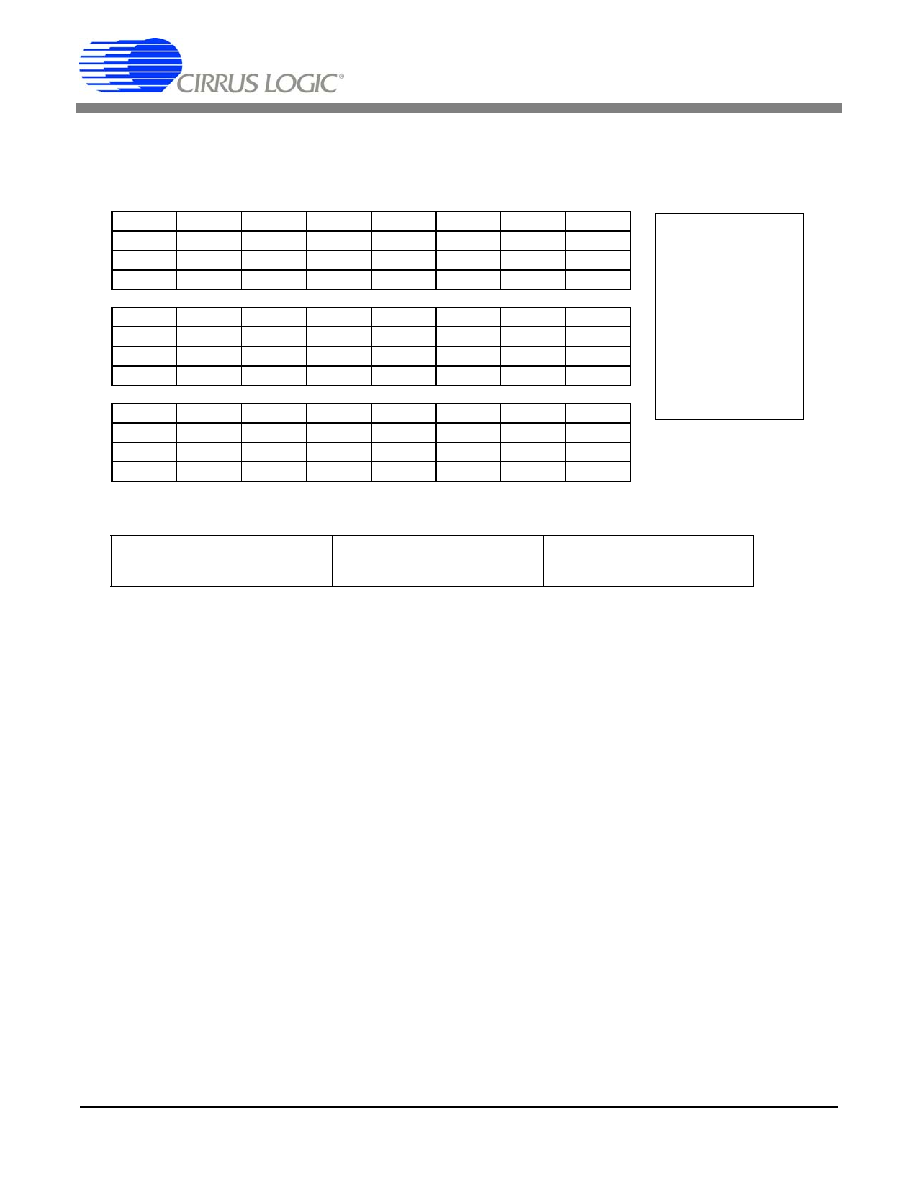
CS5378
DS639F1
76
20.2.5
OFFSET : 0x25
(MSB) 23
22
21
20
19
18
17
16
OFST23
OFST22
OFST21
OFST20
OFST19
OFST18
OFST17
OFST16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
OFST15
OFST14
OFST13
OFST12
OFST11
OFST10
OFST9
OFST8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
OFST7
OFST6
OFST5
OFST4
OFST3
OFST2
OFST1
OFST0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
DF Address: 0x25
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 47. Offset Correction Register OFFSET
Bit definitions:
23:16 OFST[23:16] Offset Correction
Upper Byte
15:8
OFST[15:8] Offset Correction
Middle Byte
15:8
OFST[7:0]
Offset Correction
Lower Byte

CS5378
DS639F1
77
20.2.6
TIMEBRK : 0x29
(MSB) 23
22
21
20
19
18
17
16
TBRK23
TBRK22
TBRK21
TBRK20
TBRK19
TBRK18
TBRK17
TBRK16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
TBRK15
TBRK14
TBRK13
TBRK12
TBRK11
TBRK10
TBRK9
TBRK8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
TBRK7
TBRK6
TBRK5
TBRK4
TBRK3
TBRK2
TBRK1
TBRK0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
DF Address: 0x29
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 48. Time Break Counter Register TIMEBRK
Bit definitions:
23:16 TBRK[23:16] Time Break Counter
Upper Byte
15:8
TBRK[15:8] Time Break Counter
Middle Byte
15:8
TBRK[7:0]
Time Break Counter
Lower Byte
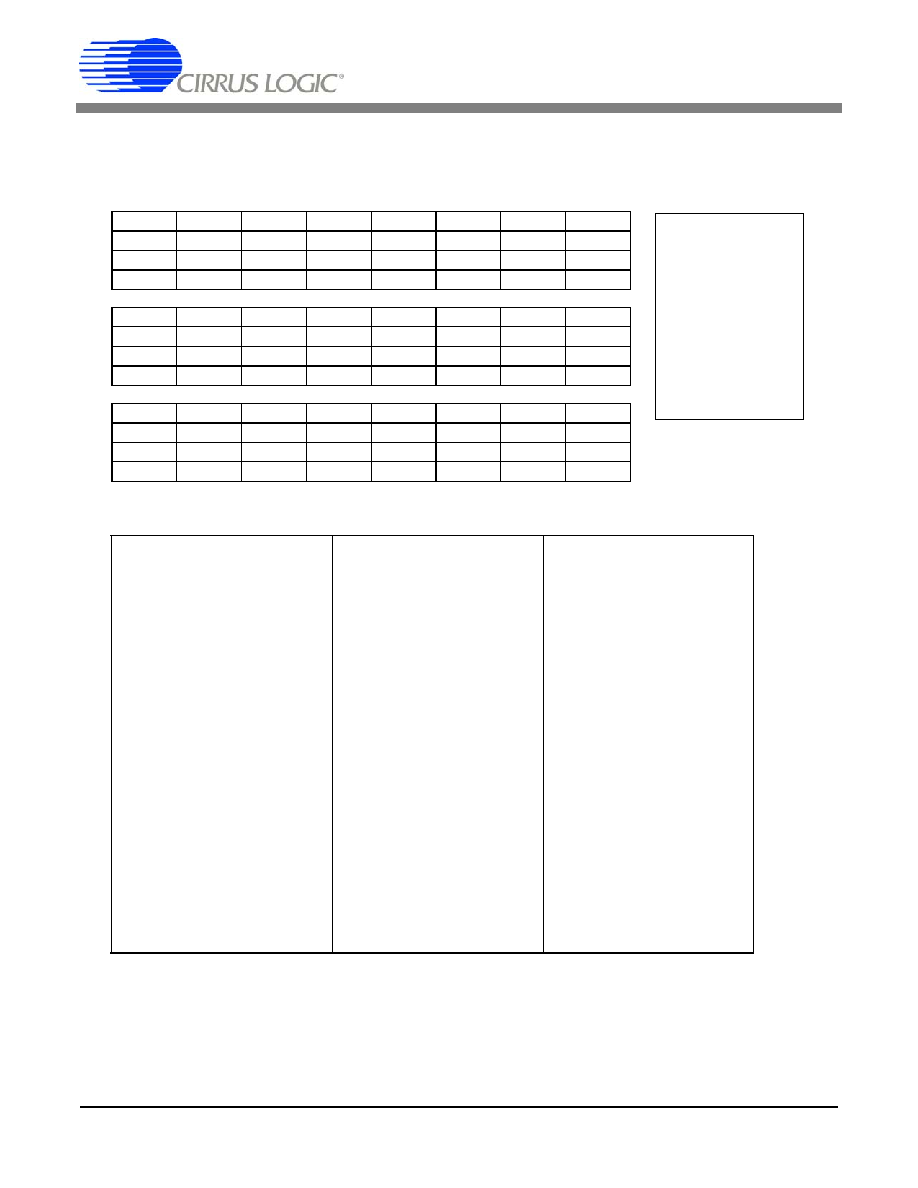
CS5378
DS639F1
78
20.2.7
TBSCFG : 0x2A
(MSB) 23
22
21
20
19
18
17
16
INTP7
INTP6
INTP5
INTP4
INTP3
INTP2
INTP1
INTP0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
TMODE
RATE2
RATE1
RATE0
TSYNC
--
--
--
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
LOOP
RUN
DDLY5
DDLY4
DDLY3
DDLY2
DDLY1
DDLY0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
DF Address: 0x2A
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 49. Test Bit Stream Configuration Register TBSCFG
Bit definitions:
23:16 INTP[7:0]
Interpolation factor
0xFF: 256
0xFE: 255
...
0x01: 2
0x00: 1 (use once)
15
TMODE
Operational mode
1: Impulse mode
0: Sine Mode
7
LOOP
Loopback
TBSDATA output
to MDATA inputs
1: Enabled
0: Disabled
14:12 RATE[2:0]
TBSDATA and
TBSCLK output
rate.
111: 2.048 MHz
110: 1.024 MHz
101: 512 kHz
100: 256 kHz
011: 128 kHz
010: 64 kHz
001: 32 kHz
000: 4 kHz
6
RUN
Run Test Bit Stream
1: Enabled
0: Disabled
11
TSYNC
Synchronization
1: Sync enabled
0: No sync
5:0
DDLY[5:0]
TBSDATA output
delay
0x3F: 63 bits
0x3E: 62 bits
...
0x01: 1 bit
0x00: 0 bits ( no
delay)
10:8
--
reserved

CS5378
DS639F1
79
20.2.8
TBSGAIN : 0x2B
(MSB) 23
22
21
20
19
18
17
16
TGAIN23
TGAIN22
TGAIN21
TGAIN20
TGAIN19
TGAIN18
TGAIN17
TGAIN16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
TGAIN15
TGAIN14
TGAIN13
TGAIN12
TGAIN11
TGAIN10
TGAIN9
TGAIN8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
TGAIN7
TGAIN6
TGAIN5
TGAIN4
TGAIN3
TGAIN2
TGAIN1
TGAIN0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
DF Address: 0x2B
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 50. Test Bit Stream Gain Register TBSGAIN
Bit definitions:
23:16 TGAIN[23:16] Test Bit Stream Gain
Upper Byte
15:8
TGAIN[15:8] Test Bit Stream
Gain Middle Byte
15:8
TGAIN[7:0] Test Bit Stream
Gain Lower Byte

CS5378
DS639F1
80
20.2.9
SYSTEM1, SYSTEM2 : 0x2C, 0x2D
(MSB) 23
22
21
20
19
18
17
16
SYS23
SYS22
SYS21
SYS20
SYS19
SYS18
SYS17
SYS16
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
15
14
13
12
11
10
9
8
SYS15
SYS14
SYS13
SYS12
SYS11
SYS10
SYS9
SYS8
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
7
6
5
4
3
2
1
(LSB) 0
SYS7
SYS6
SYS5
SYS4
SYS3
SYS2
SYS1
SYS0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
DF Address: 0x2C
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 51. User Defined System Register SYSTEM1
Bit definitions:
23:16 SYS[23:16]
System Register
Upper Byte
15:8
SYS[15:8]
System Register
Middle Byte
15:8
SYS[7:0]
System Register
Lower Byte
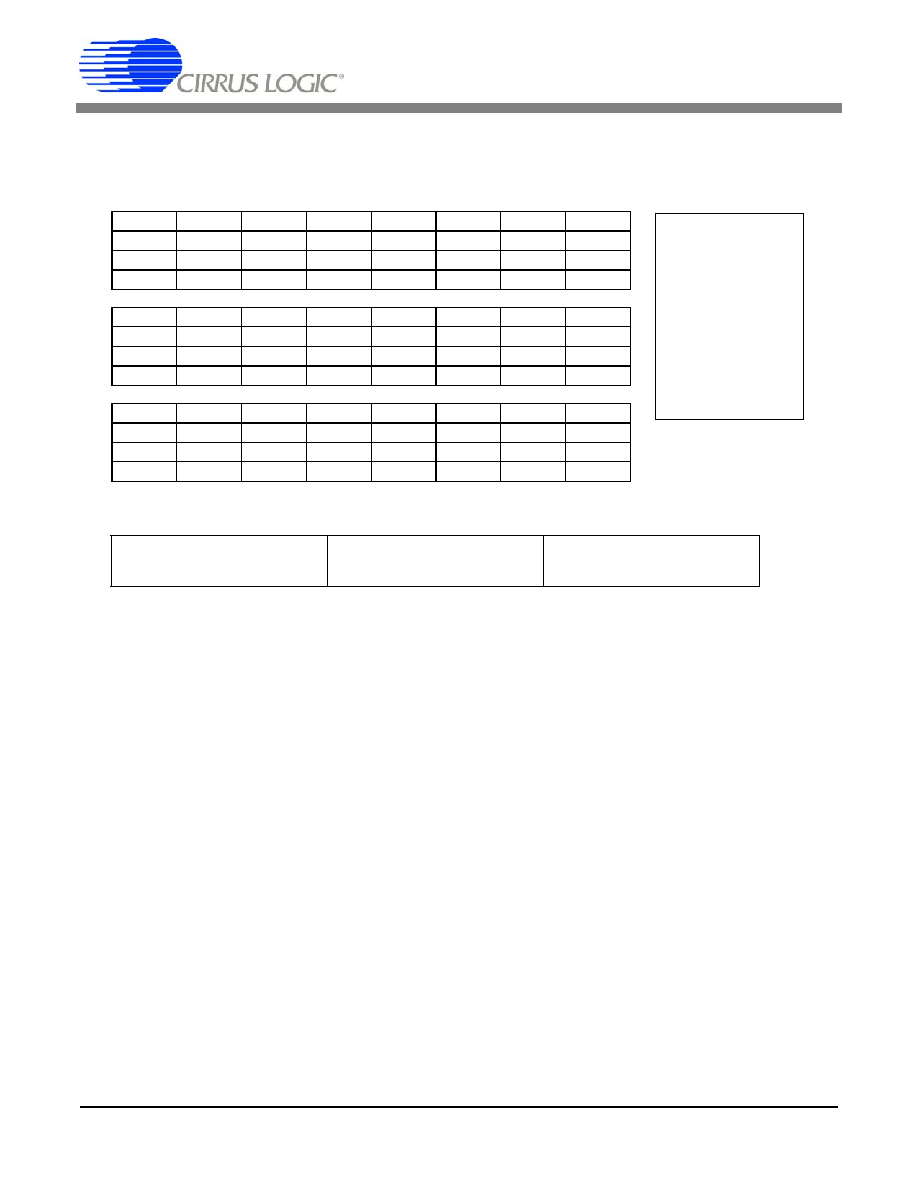
CS5378
DS639F1
81
20.2.10
VERSION : 0x2E
(MSB) 23
22
21
20
19
18
17
16
TYPE7
TYPE6
TYPE5
TYPE4
TYPE3
TYPE2
TYPE1
TYPE0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
1
1
1
1
0
0
0
15
14
13
12
11
10
9
8
HW7
HW6
HW5
HW4
HW3
HW2
HW1
HW0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
1
7
6
5
4
3
2
1
(LSB) 0
ROM7
ROM6
ROM5
ROM4
ROM3
ROM2
ROM1
ROM0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
1
DF Address: 0x2E
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 52. Hardware Version ID Register VERSION
Bit definitions:
23:16 TYPE
[7:0]
Chip Type
78 - CS5378
15:8
HW
[7:0]
Hardware Revision
01 - CS5378 Rev A
7:4
ROM
[7:0]
ROM Version
01 - Ver 1.0
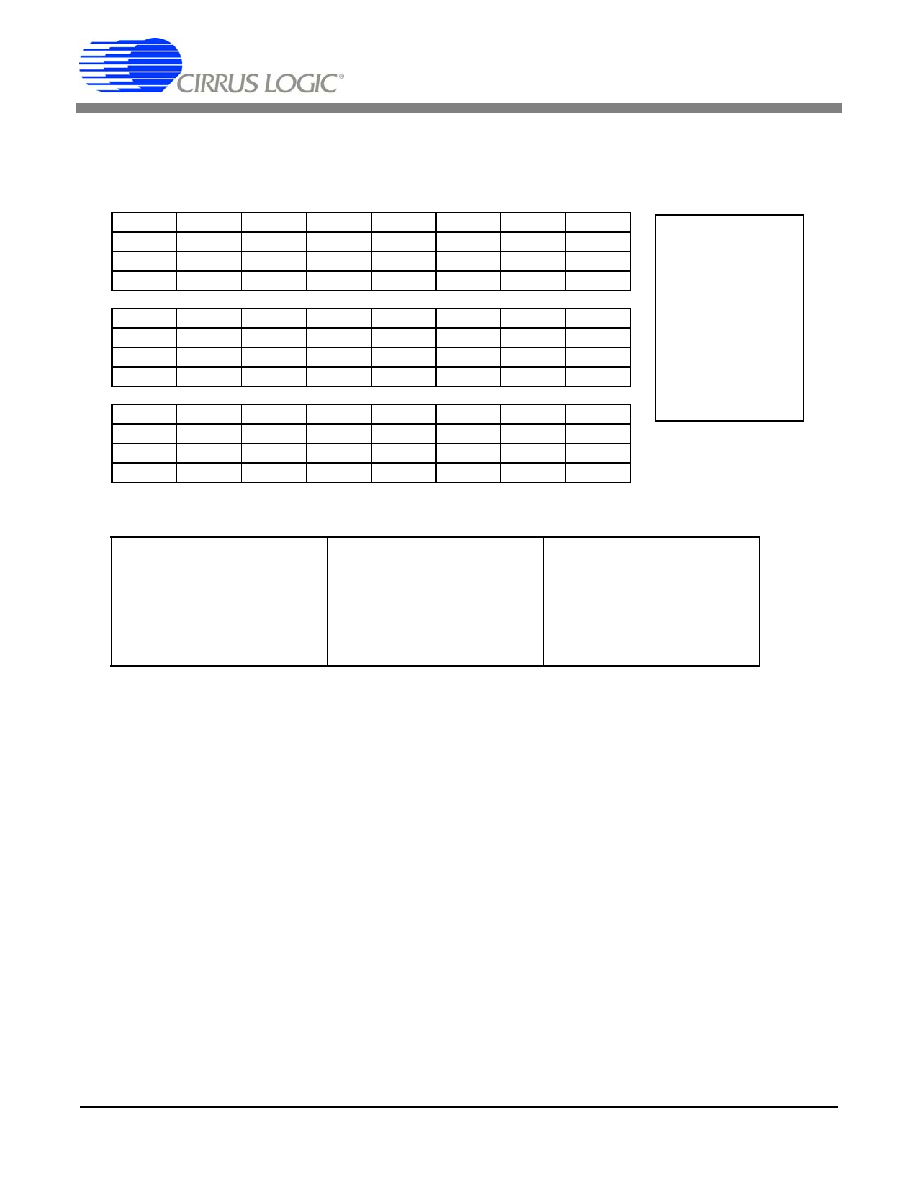
CS5378
DS639F1
82
20.2.11
SELFTEST : 0x2F
(MSB) 23
22
21
20
19
18
17
16
--
--
--
--
EU3
EU2
EU1
EU0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
1
0
1
0
15
14
13
12
11
10
9
8
DRAM3
DRAM2
DRAM1
DRAM0
PRAM3
PRAM2
PRAM1
PRAM0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
1
0
1
0
1
0
1
0
7
6
5
4
3
2
1
(LSB) 0
DROM3
DROM2
DROM1
DROM0
PROM3
PROM2
PROM1
PROM0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
1
0
1
0
1
0
1
0
DF Address: 0x2F
--
Not defined;
read as 0
R
Readable
W
Writable
R/W
Readable and
Writable
Bits in bottom rows
are reset condition
Figure 53. Self Test Result Register SELFTEST
Bit definitions:
23:20 --
reserved
15:12 DRAM
[3:0]
Data RAM Test
`A': Pass
`F': Fail
7:4
DROM
[3:0]
Data ROM Test
`A': Pass
`F': Fail
19:16 EU
[3:0]
Execution Unit Test
`A': Pass
`F': Fail
11:8
PRAM
[3:0]
Program RAM Test
`A': Pass
`F': Fail
3:0
PROM
[3:0]
Program ROM Test
`A': Pass
`F': Fail

CS5378
DS639F1
83
21. PIN DESCRIPTION
1
2
3
4
5
6
7
8
21
22
23
24
25
26
27
28
9
10
11
12
17
18
19
20
13
14
15
16
GPIO0
GPIO1
GPIO2
GPIO3
GPIO4:PLL0
GPIO5:PLL1
GPIO6:PLL2
TBSDATA
VDDPAD
GNDPAD
MCLK
MSYNC
MDATA
MFLAG
GPIO7:BOOT
SS:EECS
MOSI
MISO
SCK
DRDY
GNDCORE
VDDCORE
TIMEB
SYNC
RESET
CLK
GNDPLL
VDDPLL
Figure 54. CS5378 Pin Assignments
Pin
Name
Pin
Number
Pin
Type
Pin
Description
General Purpose Input / Output
GPIO[0:3]
1, 2, 3, 4
Input / Output
General Purpose I/O.
GPIO[4:6]:PLL[0:2]
5, 6, 7
Input / Output
General Purpose I/O with PLL mode select.
GPIO pins have weak (~100 k
) internal pullups.
PLL mode selection latched immediately after reset.
GPIO7:BOOT
28
Input / Output
General Purpose I/O with boot mode select.
GPIO pins have weak (~100 k
) internal pullups.
Boot mode selection latched immediately after reset.
PLL[2:0]
Reset Mode
111
32.768 MHz clock input (PLL bypass).
110
1.024 MHz clock input.
101
2.048 MHz clock input.
100
4.096 MHz clock input.
011
32.768 MHz clock input (PLL bypass).
010
1.024 MHz manchester input.
001
2.048 MHz manchester input.
000
4.096 MHz manchester input.
BOOT
Reset Mode
1
EEPROM boot
0
Microcontroller boot

CS5378
DS639F1
84
Pin
Name
Pin
Number
Pin
Type
Pin
Description
Test Bit Stream
TBSDATA
8
Output
Test bit stream data output.
Modulator Interface
MCLK
11
Output
Modulator clock output.
MSYNC
12
Output
Modulator sync output.
MDATA
13
Input
Modulator data input.
MFLAG
14
Input
Modulator flag input.
Telemetry Interface
CLK
17
Input
Clock input.
RESET
18
Input
Reset, active low.
SYNC
19
Input
Sync input.
TIMEB
20
Input
Time break input.
Serial Interface
DRDY
23
Output
Data ready, active low.
SCK
24
Input / Output
Serial clock.
MISO
25
Input / Output
Serial data, master in / slave out.
MOSI
26
Input / Output
Serial data, master out / slave in.
SS:EECS
27
Input
Slave select with EEPROM chip select, active low.
Power Supplies
VDDPAD,
GNDPAD
9, 10
Supply
Pin power supply.
VDDPLL,
GNDPLL
15, 16
Supply
PLL power supply.
VDDCORE,
GNDCORE
21, 22
Supply
Logic core power supply.

CS5378
DS639F1
85
22.PACKAGE DIMENSIONS
INCHES
MILLIMETERS
NOTE
DIM
MIN
NOM
MAX
MIN
NOM
MAX
A
--
--
0.084
--
--
2.13
A1
0.002
0.006
0.010
0.05
0.15
0.25
A2
0.064
0.069
0.074
1.62
1.75
1.88
b
0.009
--
0.015
0.22
--
0.38
2,3
D
0.390
0.4015
0.413
9.90
10.20
10.50
1
E
0.291
0.307
0.323
7.40
7.80
8.20
E1
0.197
0.209
0.220
5.00
5.30
5.60
1
e
0.022
0.026
0.030
0.55
0.65
0.75
L
0.025
0.0354
0.041
0.63
0.90
1.03
0�
4�
8�
0�
4�
8�
JEDEC #: MO-150
Controlling Dimension is Millimeters
28L SSOP PACKAGE DRAWING
E
N
1 2 3
e
b
2
A1
A2
A
D
SEATING
PLANE
E1
1
L
SIDE VIEW
END VIEW
TOP VIEW
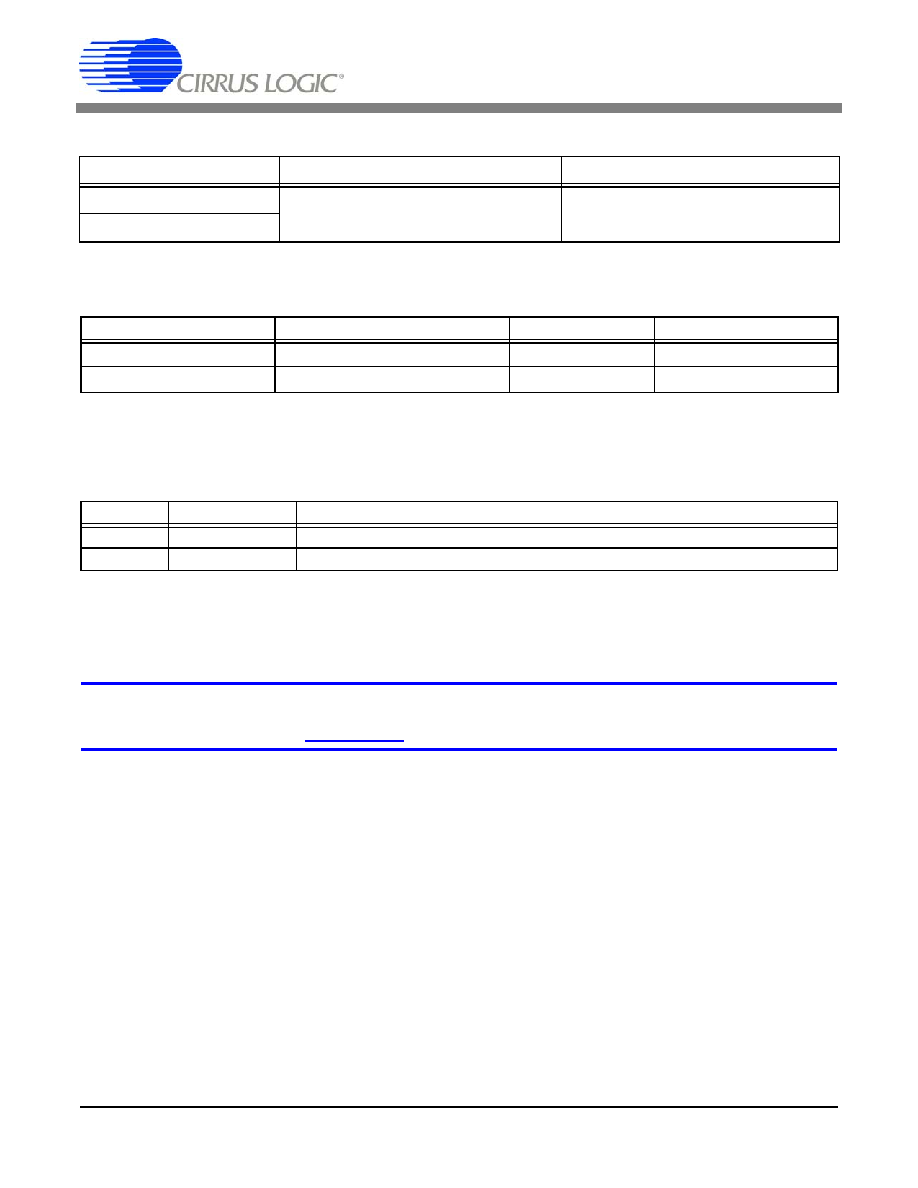
CS5378
DS639F1
86
23.ORDERING INFORMATION
24.ENVIRONMENTAL, MANUFACTURING, & HANDLING INFORMATION
* MSL (Moisture Sensitivity Level) as specified by IPC/JEDEC J-STD-020.
25.REVISION HISTORY
Model
Temperature
Package
CS5378-IS
-40 to +85 �C
28-pin SSOP
CS5378-ISZ Lead Free
Model Number
Peak Reflow Temp
MSL Rating*
Max Floor Life
CS5378-IS
240 �C
2
365 Days
CS5378-ISZ Lead Free
260 �C
3
7 Days
Revision
Date
Changes
PP1
FEB 2004
Initial "Preliminary Product" release.
F1
OCT 2005
Added lead-free device ordering information. Added MSL data.
Contacting Cirrus Logic Support
For all product questions and inquiries contact a Cirrus Logic Sales Representative.
To find the one nearest to you go to
www.cirrus.com
IMPORTANT NOTICE
Cirrus Logic, Inc. and its subsidiaries ("Cirrus") believe that the information contained in this document is accurate and reliable. However, the information is subject
to change without notice and is provided "AS IS" without warranty of any kind (express or implied). Customers are advised to obtain the latest version of relevant
information to verify, before placing orders, that information being relied on is current and complete. All products are sold subject to the terms and conditions of sale
supplied at the time of order acknowledgment, including those pertaining to warranty, indemnification, and limitation of liability. No responsibility is assumed by Cirrus
for the use of this information, including use of this information as the basis for manufacture or sale of any items, or for infringement of patents or other rights of third
parties. This document is the property of Cirrus and by furnishing this information, Cirrus grants no license, express or implied under any patents, mask work rights,
copyrights, trademarks, trade secrets or other intellectual property rights. Cirrus owns the copyrights associated with the information contained herein and gives con-
sent for copies to be made of the information only for use within your organization with respect to Cirrus integrated circuits or other products of Cirrus. This consent
does not extend to other copying such as copying for general distribution, advertising or promotional purposes, or for creating any work for resale.
CERTAIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF DEATH, PERSONAL INJURY, OR SEVERE PROP-
ERTY OR ENVIRONMENTAL DAMAGE ("CRITICAL APPLICATIONS"). CIRRUS PRODUCTS ARE NOT DESIGNED, AUTHORIZED OR WARRANTED FOR USE
IN AIRCRAFT SYSTEMS, MILITARY APPLICATIONS, PRODUCTS SURGICALLY IMPLANTED INTO THE BODY, AUTOMOTIVE SAFETY OR SECURITY DE-
VICES, LIFE SUPPORT PRODUCTS OR OTHER CRITICAL APPLICATIONS. INCLUSION OF CIRRUS PRODUCTS IN SUCH APPLICATIONS IS UNDERSTOOD
TO BE FULLY AT THE CUSTOMER'S RISK AND CIRRUS DISCLAIMS AND MAKES NO WARRANTY, EXPRESS, STATUTORY OR IMPLIED, INCLUDING THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR PARTICULAR PURPOSE, WITH REGARD TO ANY CIRRUS PRODUCT THAT IS USED
IN SUCH A MANNER. IF THE CUSTOMER OR CUSTOMER'S CUSTOMER USES OR PERMITS THE USE OF CIRRUS PRODUCTS IN CRITICAL APPLICA-
TIONS, CUSTOMER AGREES, BY SUCH USE, TO FULLY INDEMNIFY CIRRUS, ITS OFFICERS, DIRECTORS, EMPLOYEES, DISTRIBUTORS AND OTHER
AGENTS FROM ANY AND ALL LIABILITY, INCLUDING ATTORNEYS' FEES AND COSTS, THAT MAY RESULT FROM OR ARISE IN CONNECTION WITH
THESE USES.
Cirrus Logic, Cirrus, and the Cirrus Logic logo designs are trademarks of Cirrus Logic, Inc. All other brand and product names in this document may be trademarks
or service marks of their respective owners.
SPI is a trademark of Motorola, Inc.