 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: MMA3202D | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |
MMA3202D
Rev 3, 05/2005
Freescale Semiconductor
Technical Data
© Freescale Semiconductor, Inc., 2005. All rights reserved.
Surface Mount
Micromachined Accelerometer
The MMA3202 series of dual axis (X and Y) silicon capacitive, micromachined
accelerometers features signal conditioning, a 4-pole low pass filter and
temperature compensation and separate outputs for the two axes. Zero-g offset
full scale span and filter cut-off are factory set and require no external devices. A
full system self-test capability verifies system functionality.
Features
∑
Sensitivity in two separate axes: 100g X-axis and 50g Y-axis
∑
Integral Signal Conditioning
∑
Linear Output
∑
Ratiometric Performance
∑
4th Order Bessel Filter Preserves Pulse Shape Integrity
∑
Calibrated Self-test
∑
Low Voltage Detect, Clock Monitor, and EPROM Parity Check Status
∑
Transducer Hermetically Sealed at Wafer Level for Superior Reliability
∑
Robust Design, High Shocks Survivability
Typical Applications
∑
Vibration Monitoring and Recording
∑
Impact Monitoring
∑
Appliance Control
∑
Mechanical Bearing Monitoring
∑
Computer Hard Drive Protection
∑
Computer Mouse and Joysticks
∑
Virtual Reality Input Devices
∑
Sports Diagnostic Devices and Systems
ORDERING INFORMATION
Device
Temperature Range
Case No.
Package
MMA3202D
≠ 40 to +125∞C
475A-01
SOIC-20
MMA3202DR2
≠ 40 to +125∞C
475A-01
SOIC-20, Tape & Reel
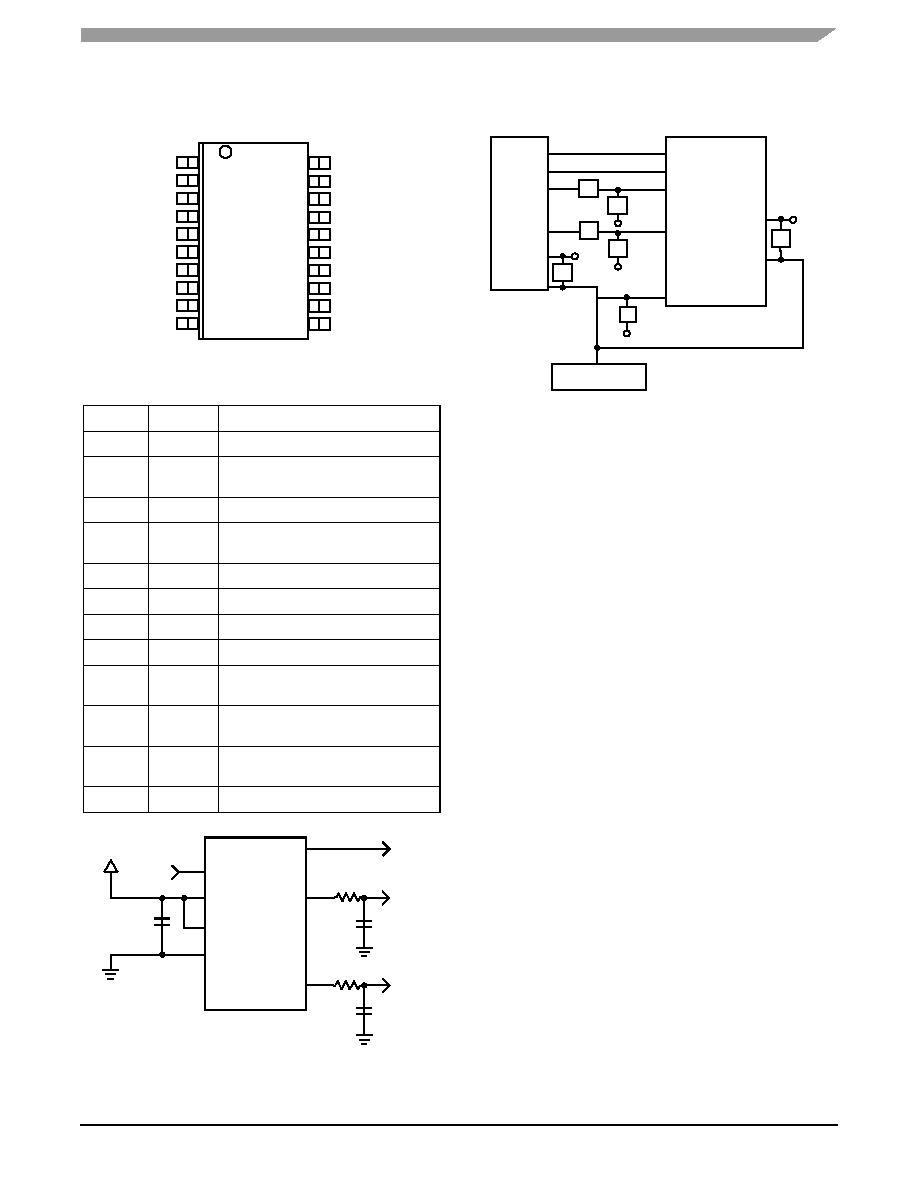
MMA3202D
MMA3202D: X-Y AXIS SENSITIVITY
MICROMACHINED
ACCELEROMETER
±100/50g
D SUFFIX
20-LEAD SOIC
CASE 475A-01
G-Cell
Sensor
Integrator
Gain
Filter
Temp
Self-Test
Control Logic &
EPROM
Trim Circuits
Clock
Generator
Oscillator
V
DD
X
OUT
V
SS
ST
Status
AV
DD
Y
OUT
14
15
16
17
18
19
20
8
7
6
5
4
3
2
1
13
N/C
N/C
N/C
ST
X
OUT
STATUS
V
DD
GND
N/C
N/C
N/C
N/C
N/C
N/C
N/C
12
10
9
11
V
SS
AV
DD
N/C
Y
OUT
N/C
Figure 1. Simplified Accelerometer Functional Block Diagram
Figure 2. Pin Connections
Sensors
2
Freescale Semiconductor
MMA3202D
ELECTRO STATIC DISCHARGE (ESD)
WARNING: This device is sensitive to electrostatic
discharge.
Although the accelerometers contain internal 2 kV ESD
protection circuitry, extra precaution must be taken by the
user to protect the chip from ESD. A charge of over 2000 volts
can accumulate on the human body or associated test
equipment. A charge of this magnitude can alter the
performance or cause failure of the chip. When handling the
accelerometer, proper ESD precautions should be followed
to avoid exposing the device to discharges which may be
detrimental to its performance.
Table 1. Maximum Ratings
(Maximum ratings are the limits to which the device can be exposed without causing permanent damage.)
Rating
Symbol
Value
Unit
Powered Acceleration (all axes)
G
pd
1500
g
Unpowered Acceleration (all axes)
G
upd
2000
g
Supply Voltage
V
DD
≠0.3 to +7.0
V
Drop Test
(1)
1. Dropped onto concrete surface from any axis.
D
drop
1.2
m
Storage Temperature Range
T
stg
≠40 to +125
∞C
Sensors
Freescale Semiconductor
3
MMA3202D
Table 2. Operating Characteristics
(Unless otherwise noted: ≠40∞C
T
A
+105∞C, 4.75 V
DD
5.25, Acceleration = 0g, Loaded output.)
(1)
1. For a loaded output the measurements are observed after an RC filter consisting of a 1 k resistor and a 0.01 µF capacitor to ground.
Characteristic
Symbol
Min
Typ
Max
Unit
Operating Range
(2)
Supply Voltage
(3)
Supply Current
Operating Temperature Range
Acceleration Range X-axis
Acceleration Range Y-axis
2. These limits define the range of operation for which the part will meet specification.
3. Within the supply range of 4.75 and 5.25 volts, the device operates as a fully calibrated linear accelerometer. Beyond these supply limits
the device may operate as a linear device but is not guaranteed to be in calibration.
V
DD
I
DD
T
A
g
FS
g
FS
4.75
6
≠40
--
--
5.00
8
--
112.5
56.3
5.25
10
+125
--
--
V
mA
∞C
g
g
Output Signal
Zero g (T
A
= 25∞C, V
DD
= 5.0 V)
(4)
Zero g
Sensitivity X-axis (T
A
= 25∞C, V
DD
= 5.0 V)
(5)
Sensitivity Y-axis (T
A
= 25∞C, V
DD
= 5.0 V)
Sensitivity X-axis
Sensitivity Y-axis
Bandwidth Response
Nonlinearity
4. The device can measure both + and ≠ acceleration. With no input acceleration the output is at midsupply. For positive acceleration the output
will increase above V
DD
/2 and for negative acceleration the output will decrease below V
DD
/2.
5. The device is calibrated at 20g.
V
OFF
V
OFF,V
S
S
S
V
S
V
f
≠3dB
NL
OUT
2.35
0.46 V
DD
19
38
3.72
7.44
360
≠1.0
2.5
0.50 V
DD
20
40
4
8
400
--
2.65
0.54 V
DD
21
42
4.28
8.56
440
+1.0
V
V
mV/g
mV/g
mV/g/V
mV/g/V
Hz
% FSO
Noise
RMS (.01 Hz ≠ 1 kHz)
Power Spectral Density
Clock Noise (without RC load on output)
(6)
6. At clock frequency
70 kHz.
n
RMS
n
PSD
n
CLK
--
--
--
--
110
2.0
2.8
--
--
mVrms
µV/(Hz
1/2
)
mVpk
Self-Test
Output Response
Input Low
Input High
Input Loading
(7)
Response Time
(8)
7. The digital input pin has an internal pull-down current source to prevent inadvertent self test initiation due to external board level leakages.
8. Time for the output to reach 90% of its final value after a self-test is initiated.
g
ST
V
IL
V
IH
I
IN
t
ST
9.6
V
SS
0.7
◊ V
DD
≠30
--
12
--
--
≠100
2.0
14.4
0.3
◊ V
DD
V
DD
≠300
≠
g
V
V
µA
ms
Status
(9)
(10)
Output Low (I
load
= 100
µA)
Output High (I
load
= 100
µA)
9. The Status pin output is not valid following power-up until at least one rising edge has been applied to the self-test pin. The Status pin is
high whenever the self-test input is high, as a means to check the connectivity of the self-test and Status pins in the application.
10. The Status pin output latches high if a Low Voltage Detection or Clock Frequency failure occurs, or the EPROM parity changes to odd. The
Status pin can be reset low if the self-test pin is pulsed with a high input for at least 100
µs, unless a fault condition continues to exist.
V
OL
V
OH
--
V
DD
≠ 0.8
--
--
0.4
--
V
V
Minimum Supply Voltage (LVD Trip)
V
LVD
2.7
3.25
4.0
V
Clock Monitor Fail Detection Frequency
f
min
50
--
260
kHz
Output Stage Performance
Electrical Saturation Recovery Time
(11)
Full Scale Output Range (I
OUT
= 200
µA)
Capacitive Load Drive
(12)
Output Impedence
11. Time for amplifiers to recover after an acceleration signal causing them to saturate
12. Preserves phase margin (60∞) to guarantee output amplifier stability.
t
DELAY
V
FSO
C
L
Z
O
--
0.25
--
--
0.2
--
--
300
--
V
DD
≠ 0.25
100
--
ms
V
pF
W
Mechanical Characteristics
Transverse Sensitivity
(13)
Package Resonance
13. A measure of the device's ability to reject an acceleration applied 90∞ from the true axis of sensitivity.
V
XZ,YZ
f
PKG
--
--
--
10
5.0
--
% FSO
kHz
Sensors
4
Freescale Semiconductor
MMA3202D
PRINCIPLE OF OPERATION
The Freescale Semiconductor, Inc. accelerometer is a
surface-micromachined integrated-circuit accelerometer.
The device consists of a surface micromachined
capacitive sensing cell (g-cell) and a CMOS signal
conditioning ASIC contained in a single integrated circuit
package. The sensing element is sealed hermetically at the
wafer level using a bulk micromachined "cap'' wafer.
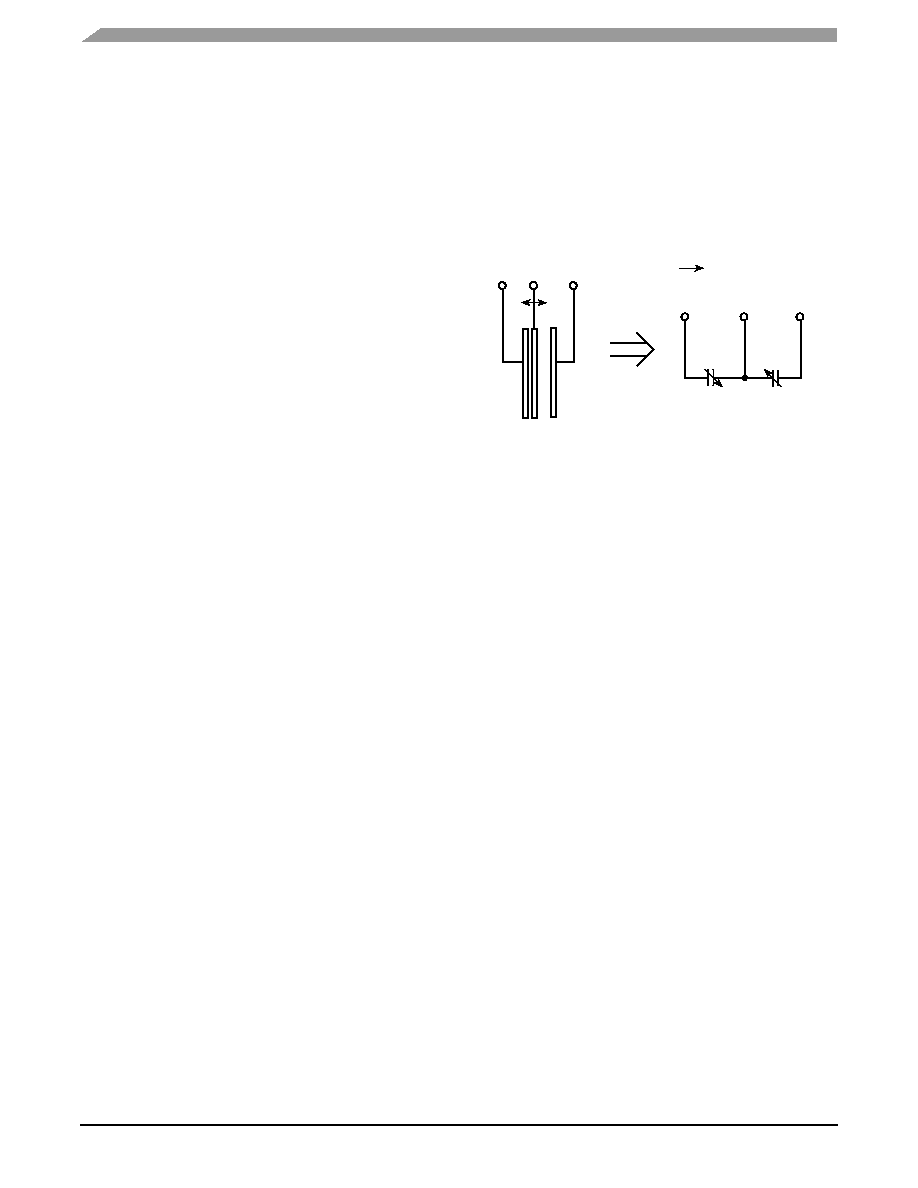
The g-cell is a mechanical structure formed from
semiconductor materials (polysilicon) using semiconductor
processes (masking and etching). It can be modeled as a set
of beams attached to a movable central mass that move
between fixed beams. The movable beams can be deflected
from their rest position by subjecting the system to an
acceleration (
Figure 3
).
As the beams attached to the central mass move, the
distance from them to the fixed beams on one side will
increase by the same amount that the distance to the fixed
beams on the other side decreases. The change in distance
is a measure of acceleration.
The g-cell beams form two back-to-back capacitors
(
Figure 3
). As the central mass moves with acceleration, the
distance between the beams change and each capacitor's
value will change, (C = NA
/D). Where A is the area of the
facing side of the beam,
is the dielectric constant, D is the
distance between the beams, and N is the number of beams.
The X-Y device contains two structures at right angles to
each other.
The CMOS ASIC uses switched capacitor techniques to
measure the g-cell capacitors and extract the acceleration
data from the difference between the two capacitors. The
ASIC also signal conditions and filters (switched capacitor)
the signal, providing a high level output voltage that is
ratiometric and proportional to acceleration.
Figure 3. Simplified Transducer Physical Model
SPECIAL FEATURES
Filtering
The Freescale Semiconductor, Inc. accelerometers
contain an onboard 4-pole switched capacitor filter. A Bessel
implementation is used because it provides a maximally flat
delay response (linear phase) thus preserving pulse shape
integrity. Because the filter is realized using switched
capacitor techniques, there is no requirement for external
passive components (resistors and capacitors) to set the cut-
off frequency.
Self-Test
The sensor provides a self-test feature that allows the
verification of the mechanical and electrical integrity of the
accelerometer at any time before or after installation. This
feature is critical in applications such as automotive airbag
systems where system integrity must be ensured over the life
of the vehicle. A fourth "plate'' is used in the g-cell as a self-
test plate. When the user applies a logic high input to the self-
test pin, a calibrated potential is applied across the self-test
plate and the moveable plate. The resulting electrostatic
force (Fe =
1
/
2
AV
2
/d
2
) causes the center plate to deflect. The
resultant deflection is measured by the accelerometer's
control ASIC and a proportional output voltage results. This
procedure assures that both the mechanical (g-cell) and
electronic sections of the accelerometer are functioning.
Ratiometricity
Ratiometricity simply means that the output offset voltage
and sensitivity will scale linearly with applied supply voltage.
That is, as you increase supply voltage the sensitivity and
offset increase linearly; as supply voltage decreases, offset
and sensitivity decrease linearly. This is a key feature when
interfacing to a microcontroller or an A/D converter because
it provides system level cancellation of supply induced errors
in the analog to digital conversion process.
Status
Freescale accelerometers include fault detection circuitry
and a fault latch. The Status pin is an output from the fault
latch, OR'd with self-test, and is set high whenever one (or
more) of the following events occur:
∑
Supply voltage falls below the Low Voltage Detect (LVD)
voltage threshold
∑
Clock oscillator falls below the clock monitor minimum
frequency
∑
Parity of the EPROM bits becomes odd in number.
The fault latch can be reset by a rising edge on the self-test
input pin, unless one (or more) of the fault conditions
continues to exist.
Acceleration
Sensors
Freescale Semiconductor
5
MMA3202D
BASIC CONNECTIONS
PINOUT DESCRIPTION
Figure 4. SOIC Accelerometer with Recommended
Connection Diagram
PCB Layout
Figure 5. Recommended PCB Layout for Interfacing
Accelerometer to Microcontroller
NOTE:
∑
Use a 0.1
µF capacitor on V
DD
to decouple the power
source.
∑
Physical coupling distance of the accelerometer to the
microcontroller should be minimal.
∑
Place a ground plane beneath the accelerometer to
reduce noise, the ground plane should be attached to all
of the open ended terminals shown in
Figure 5
.
∑
Use an RC filter of 1 k
and 0.01 µF on the output of the
accelerometer to minimize clock noise (from the switched
capacitor filter circuit).
∑
PCB layout of power and ground should not couple power
supply noise.
∑
Accelerometer and microcontroller should not be a high
current path.
∑
A/D sampling rate and any external power supply
switching frequency should be selected such that they do
not interfere with the internal accelerometer sampling
frequency. This will prevent aliasing errors.
Table 3. Pin Descriptions
Pin No.
Pin Name
Description
1 thru 3
--
Leave unconnected.
4
--
No internal connection. Leave
unconnected.
5
ST
Logic input pin used to initiate self-test.
6
X
OUT
Output voltage of the accelerometer. X
Direction.
7
STATUS
Logic output pin to indicate fault.
8
V
SS
The power supply ground.
9
V
DD
The power supply input.
10
AV
DD
Power supply input (Analog).
11
Y
OUT
Output voltage of the accelerometer. Y
Direction.
12 thru 16
--
Used for factory trim. Leave
unconnected.
17 thru 19
--
No internal connection. Leave
unconnected.
20
GND
Ground.
14
15
16
17
18
19
20
8
7
6
5
4
3
2
1
13
N/C
ST
X
OUT
STATUS
V
DD
GND
N/C
N/C
N/C
N/C
N/C
N/C
12
10
9
11
V
SS
AV
DD
N/C
Y
OUT
N/C
N/C
N/C
N/C
10
X
OUT
Y
OUT
MMA3202D
ST
V
DD
V
SS
R1
1 k
C2
0.01
µF
5
9
8
Logic
Input
V
DD
C1
0.1
µF
7
6
C3
0.01
µF
R2
1 k
AV
DD
11
Status
X Output
Signal
Y Output
Signal
P0
A/D In
V
RH
V
SS
V
DD
ST
Y
OUT
V
SS
V
DD
0.01
µF
C
1 k
0.1
µF
0.1
µF
Power Supply
C
R
C
0.1
µF
P1
STATUS
A/D In
X
OUT
R
0.01
µF
C
1 k
M
i
cr
oco
n
tr
ol
le
r
Accel
er
ometer
C