 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: HA12188AF | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |
HA12188AF
Pre-Amplifier and Servo IC for Quadruple-Speed CD-ROM
ADE-207-183(Z)
1st. Edition
October 1995
Description
The typical values of built-in capacitances in this IC are reduced 10% compared with those in IC
HA12188F. The values of Electrical Characteristics of this IC are same as those of IC HA12188F.
Functions
∑
RF amplifier
∑
Focus error amplifier
∑
Tracking error amplifier
∑
FOK detector
∑
Mirror detector
∑
Defect detector
∑
APC amplifier
∑
Focus, tracking, and sled servo control
∑
Inner/outer direction detector
Features
∑
Built-in variable resistors for adjusting tracking error EF balance, tracking gain, and focus gain
∑
Single power supply
∑
Supports double and quadruple speeds
∑
Few external components
∑
FP-56 package
HA12188AF
Rev.1, Oct. 1995, page 2 of 35
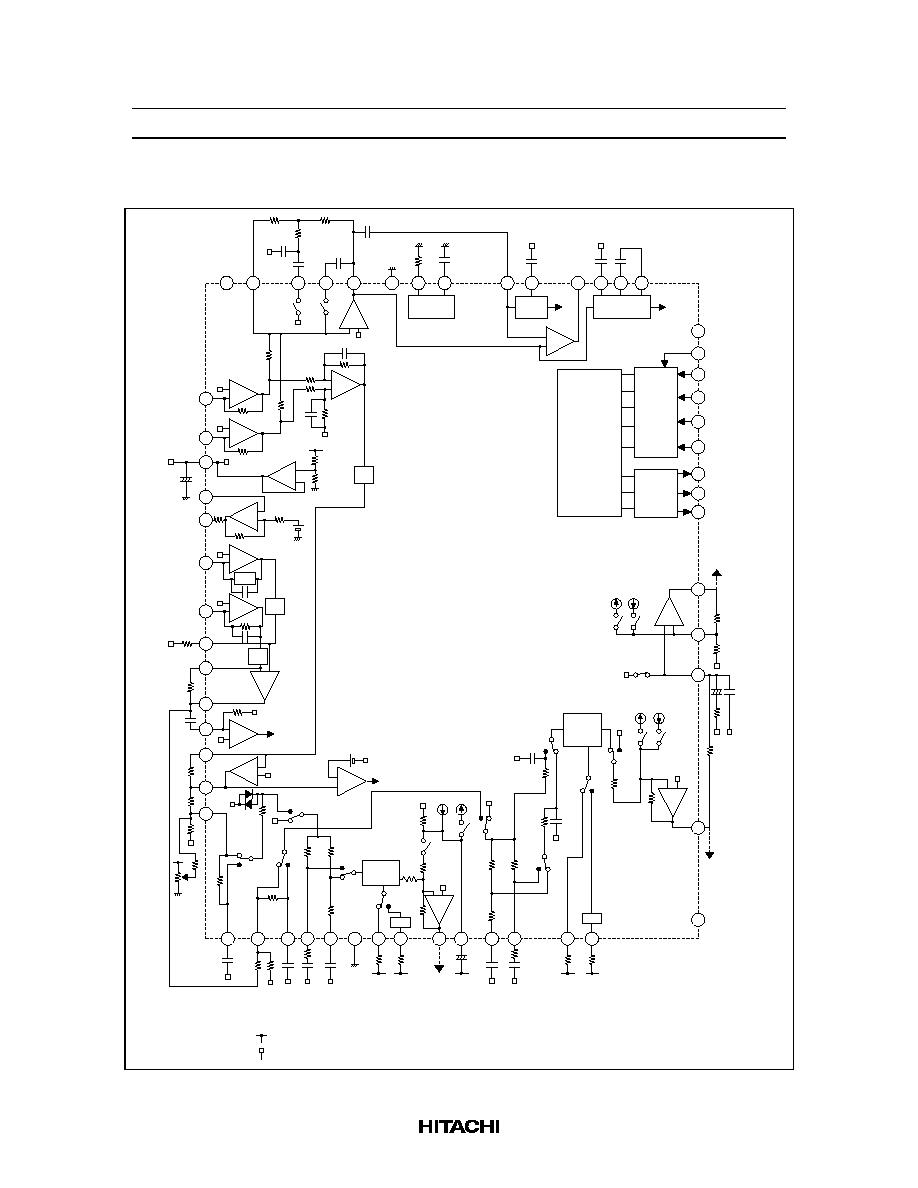
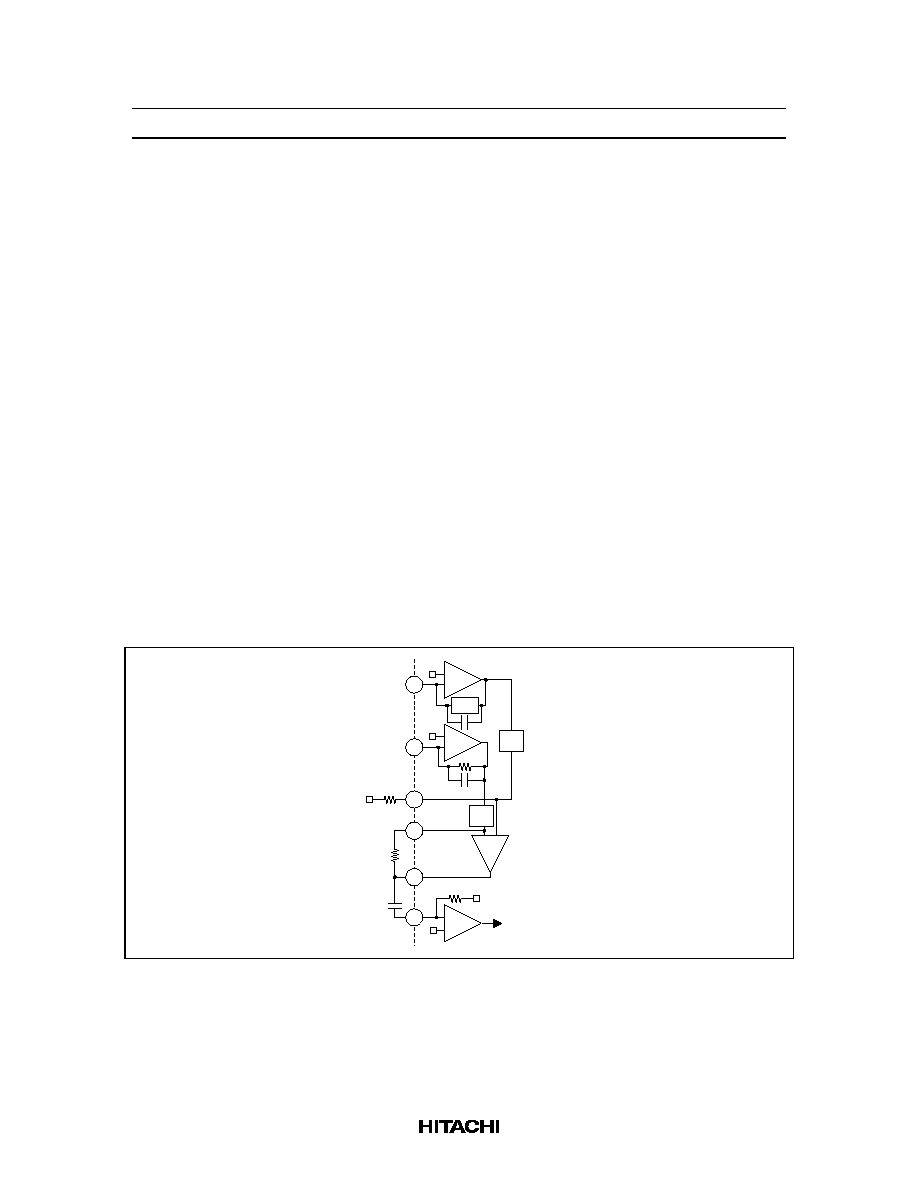
Block Diagram
RF1
RF2
FE
APC
TR1
TR2
TE
TZC
FZC
DS1
FOK
RFS
Bias
V
CC
V
CC
TM1
THS
FS4
TM3 TM4
TM7
TSA
FS2
FS1
FSA
DS2
TM5 TM6
TM2
SSA
CLK
LDS
DATA
XLT
DC
XRST
SENS
COUT
RS2
RS1
TPS
TLS
FPS
FLS
DEFECT
or DRT
BAL
VR
Focus
bias
adj.
FAC
DRIV.
TAC
DRIV.
SLM
DRIV.
35
36
37
38
39
41
42
44
43
46
47
48
49
50
56
1
2
5
6
15
17
18
20
21
22
23
24
25
26
27
28
40
≠ +
≠
+
≠
+
≠
+
45
+
≠
+
≠
+
VR
≠
+
51
52
≠
+
≠ +
53
55
≠
+
≠
54
3
4
7
8
9
≠ +
+
11
12
10
13
14
≠ +
16
Phase
compen.
+
19
≠
+
≠
+
31
34
32
30 29
33
Defect
Mirror
FA
Input
I/F
Logic
VR
+
Output
I/F
Phase
compen.
≠
+
◊
2.7
◊
2.7
∑ The states of the IC's internal switches at XRST = "L" are shown at block diagram.
∑ The black dot symbol of transfer switch shows on state.
∑ The symbols " " mean connecting to V
CC
.
∑ The symbols " " mean connecting to pin 45.

HA12188AF
Rev.1, Oct. 1995, page 3 of 35
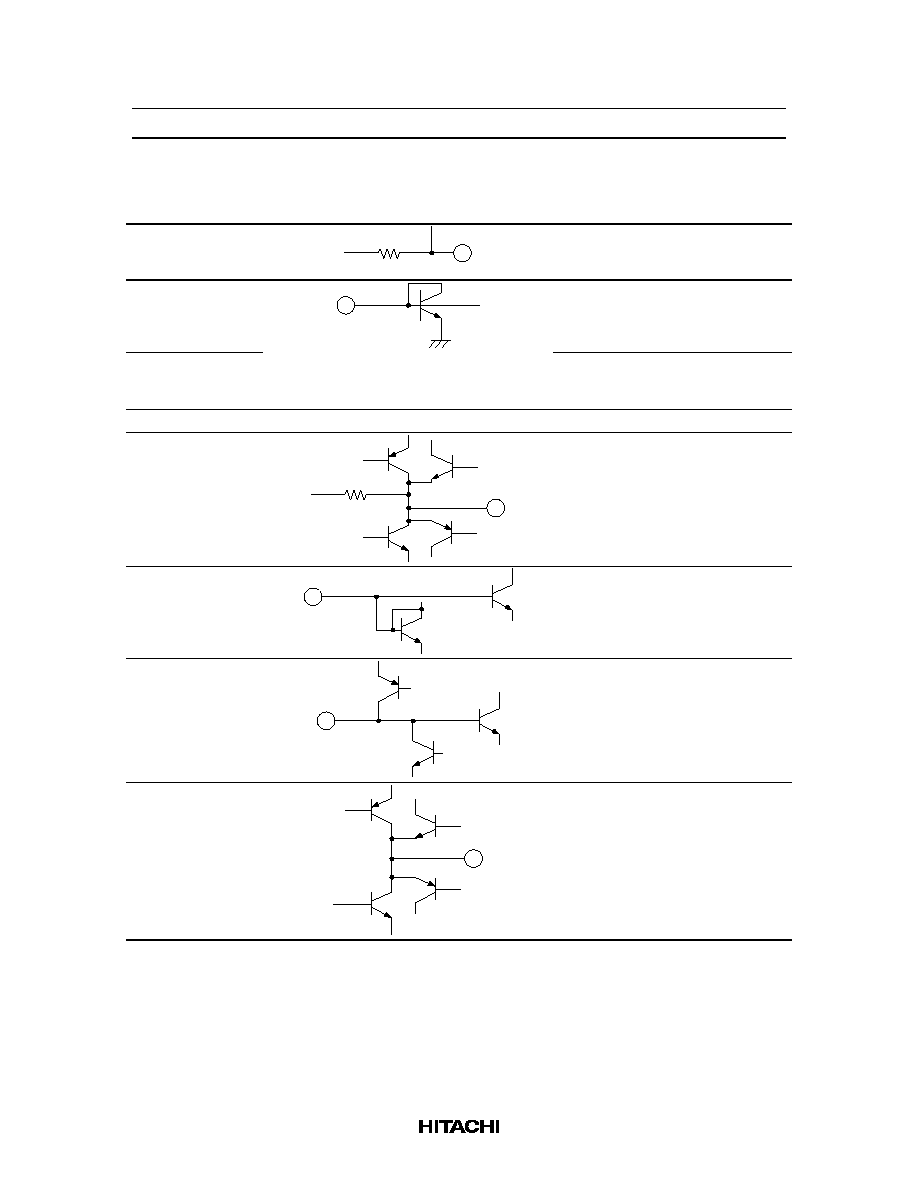
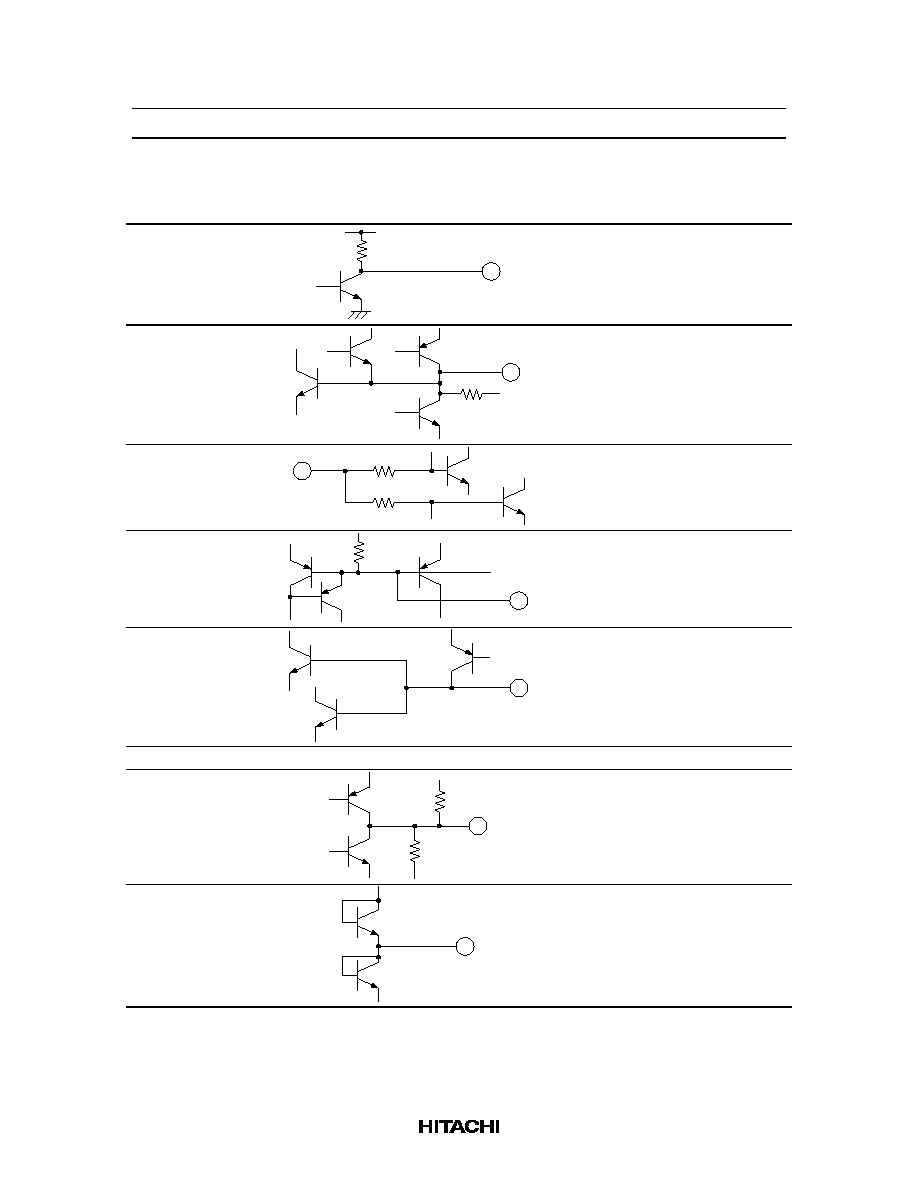
Pin Descriptions and Equivalent Circuits
Pin No.
Symbol
Equivalent Circuit
Function
1
FH
470 k
Focus error hold signal output
3
TH
Tracking error hold signal output
2
TSI
Tracking servo input
56
FSI
Focus servo input
4
FLS
90 k
Focus-servo low-frequency filter
resistor & capacitor connection
(FLS on)
5
FLS
30 k
Focus-servo low-frequency filter
capacitor connection (FLS off)
6
SGND
--
Servo ground
7
FPS
Resistor connection for programming
focus-servo phase compensation
(FPS off)
8
FPS
Resistor connection for programming
focus-servo phase compensation
(FPS on)
9
FSA
20 k
Focus servo output
10
FS1
20 k
FS1 voltage output
11
TLS
33 k
Tracking servo low-frequency filter
capacitor connection (TLS off)
HA12188AF
Rev.1, Oct. 1995, page 4 of 35
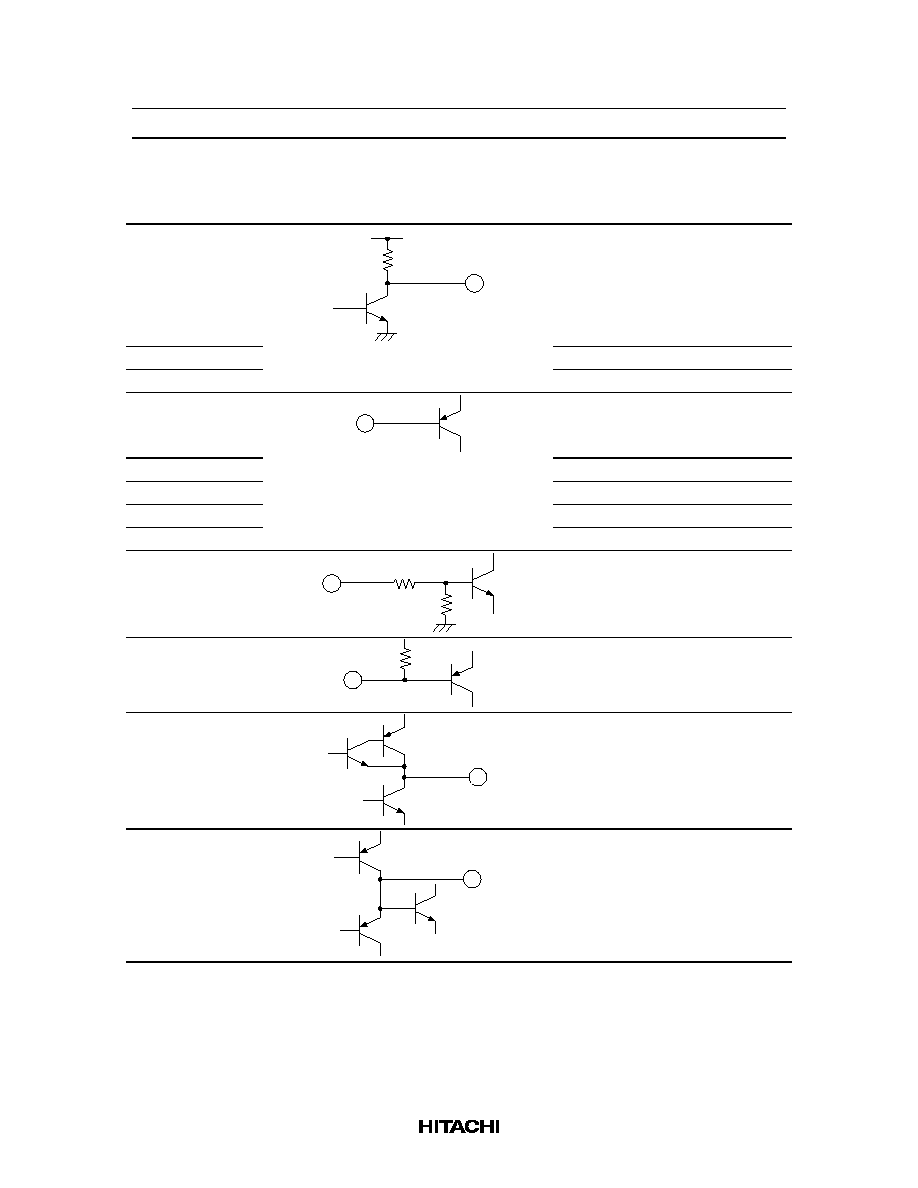
Pin Descriptions and Equivalent Circuits (cont)
Pin No.
Symbol
Equivalent Circuit
Function
12
TLS
100 k
Tracking servo low-frequency filter
resistor & capacitor connection
(TLS on)
13
TPS
Resistor connection for programming
tracking servo phase compensation
(TPS off)
14
TPS
Resistor connection for programming
tracking servo phase compensation
(TPS on)
15
SV
CC
--
Servo power supply
16
TSA
22 k
Tracking servo output
17
TM2
Sled servo input
18
SSM
SSA amplifier inverting input
19
SSA
Sled servo output
HA12188AF
Rev.1, Oct. 1995, page 5 of 35
Pin Descriptions and Equivalent Circuits (cont)
Pin No.
Symbol
Equivalent Circuit
Function
20
DRT
10 k
V
CC
Defect signal output or inner/outer
direction signal output
21
COUT
COUT output
22
SENS
SENS output
23
XRST
Reset input
24
DC
DC input
25
XLT
XLT input
26
DATA
Data input
27
CLK
Clock input
28
LDS
50 k
50 k
Laser switch input
29
DFIN
43 k
Defect comparator input
30
DFO
Defect envelope signal output
31
DFH
Defect hold signal output
HA12188AF
Rev.1, Oct. 1995, page 6 of 35
Pin Descriptions and Equivalent Circuits (cont)
Pin No.
Symbol
Equivalent Circuit
Function
32
FOK
20 k
V
CC
FOK comparator output
33
MIRH
100 k
Mirror hold signal output
34
RFA
40 k
18 k
RF signal AC input
35
BYPS
20 k
Capacitor connection for ripple filter
36
ISET
Resistor connection for programming
reference current
37
PGND
--
Pre-amplifier ground
38
RFO
18 k
40 k
RF signal output
39
RS1
RS1 switch

HA12188AF
Rev.1, Oct. 1995, page 7 of 35
Pin Descriptions and Equivalent Circuits (cont)
Pin No.
Symbol
Equivalent Circuit
Function
40
RS2
RS2 switch
41
RFM
5 k
5 k
RFS amplifier inverting input
42
PV
CC
--
Pre-amplifier power supply
43
RF1
10 k
RF1 amplifier input
44
RF2
RF2 amplifier input
45
V
C
20 k
Voltage reference output
46
MD
APC amplifier input
47
LD
150 k
1 k
APC amplifier output
48
TR1
3.6 p
32 k
80 k
20 k
16 k
TR1 amplifier input
49
TR2
TR2 amplifier input

HA12188AF
Rev.1, Oct. 1995, page 8 of 35
Pin Descriptions and Equivalent Circuits (cont)
Pin No.
Symbol
Equivalent Circuit
Function
50
TEP
22.6 k
TE amplifier non-inverting input
51
TEM
TE amplifier inverting input
52
TEO
TE amplifier output
53
TZC
75 k
TZC comparator input
54
FAM
5.5 k
FA amplifier inverting input
55
FAO
FA amplifier output

HA12188AF
Rev.1, Oct. 1995, page 9 of 35
Operation
1. Microprocessor Control
The IC's internal switches can be operated by sending control data from a microprocessor. The signal
timing is shown in figure 1, and the control commands are listed in table 1.
DATA
CLK
XLT
T1
T2
T3
T4
0
1
2
3
4
5
6
7
Item
Clock frequency
Clock pulse width
Delay time
Latch pulse width
Symbol
f
CLK
T1, T2
T3
T4
Min
--
0.96
1
2
Typ
--
--
--
--
Max
520
--
--
--
Unit
kHz
µ
s
µ
s
µ
s
Figure 1 Timing Diagram for Microprocessor Control
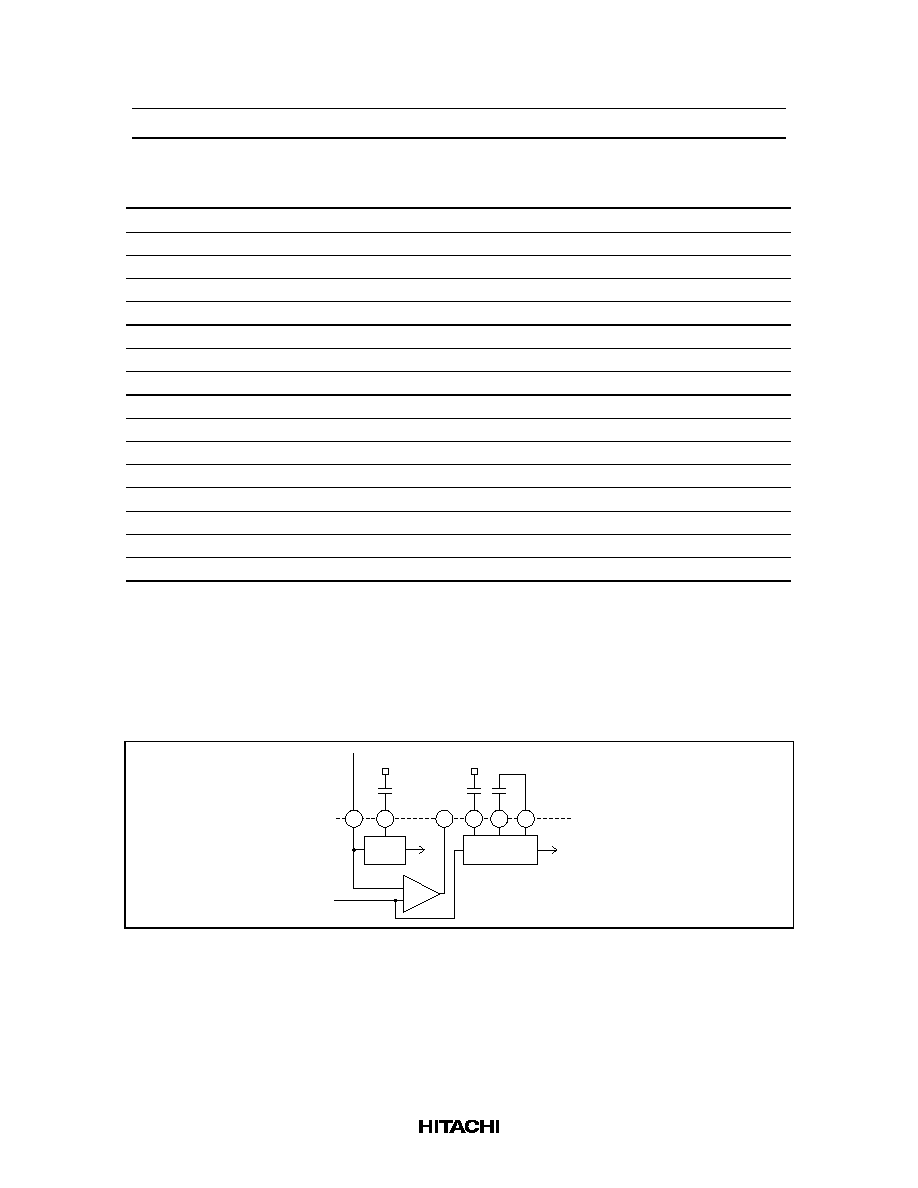
Signals from the microprocessor are input at pins 23 to 27. A low input at the XRST pin resets the IC.
Normally this pin should be kept high. (See figure 2.)
CLK
DATA
XLT
DC
XRST
SENS
COUT
DEFECT
or DRT
20
21
22
23
24
25
26
27
Input
I/F
Logic
Output
I/F
Figure 2 Microprocessor Interface
HA12188AF
Rev.1, Oct. 1995, page 10 of 35
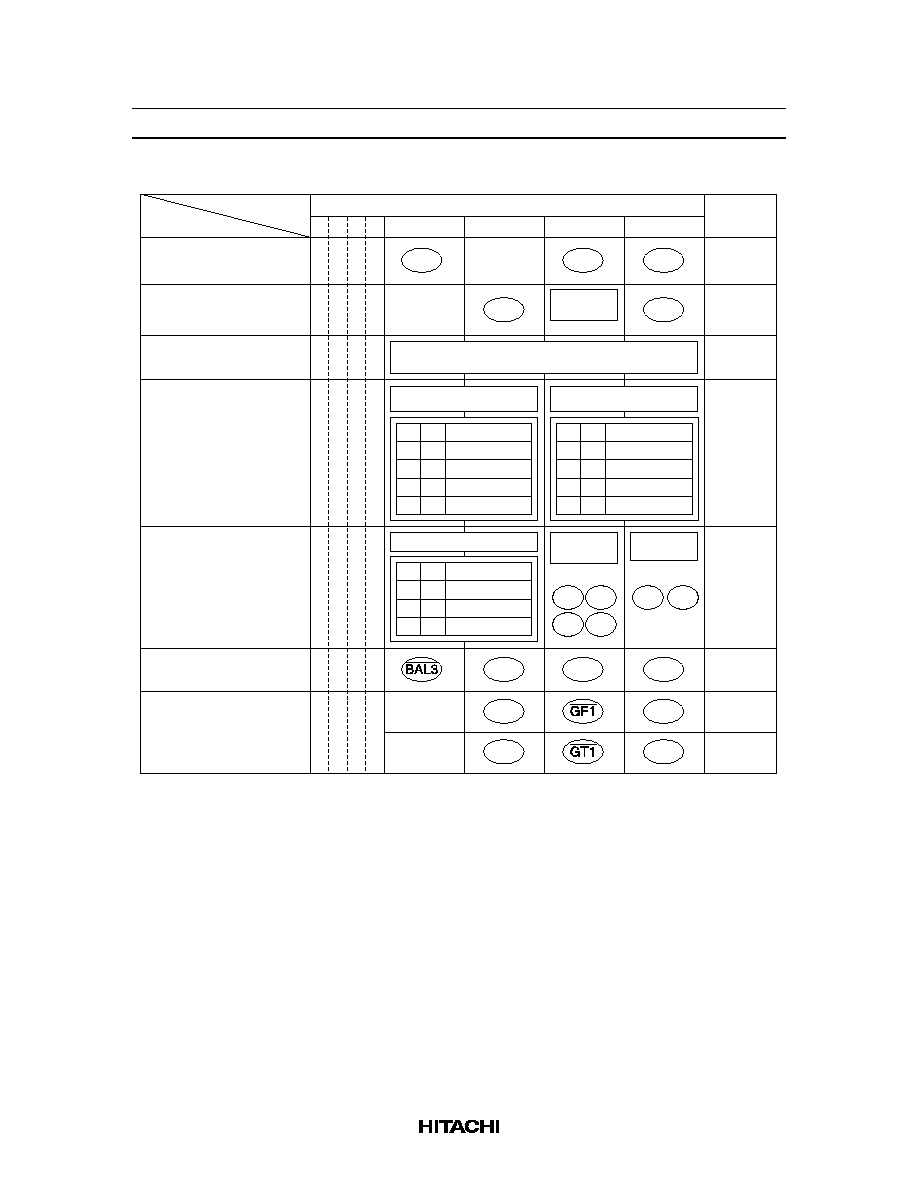
Table 1
Microprocessor Control Commands
Focus mode
Access control mode
Pulse setting mode
DATA
D7D6D5D4
D3
D2
D1
D0
SENS
Tracking mode and FS1
DRT setting
Speed setting mode
EF balance adjustment
Tracking gain and focus
gain adjustment
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
0 1 0 0
0 1 0 1
0 1 1 0
FS4
DEFECT
OFF
FS2
FS1
FZC
DRT
0: Defect
1: Direction
TM7
THS
H
TZC
H
H
BAL2
BAL1
BAL0
H
0 ;
GF2
GF0
H
GT2
GT0
*4
TM5, TM6 current
TM3, TM4 current
Focus
tracking
Mirror
FS1 current
See table 2
RF
Focus
gain
1 ; Tracking
gain
FLS FPS
TLS TPS
RS1 RS2
H
*2
*7
D2
0
1
1
Mode
Normal
Double
Quadruple
D3
0
0
1
*3
*1
*5
D2
0
1
0
1
Current value
32
µ
A
16
µ
A
24
µ
A
8
µ
A
D3
0
0
1
1
*6
*6
D0
0
1
0
1
Current value
32
µ
A
16
µ
A
24
µ
A
8
µ
A
D1
0
0
1
1
Notes: 1.
2.
3.
4.
5.
6.
7.
The switch name surrounded by circle means that the switch turns on when the corresponding
bit is "1". The switch name with bar surrounded by circle means that the switch turns on when
the corresponding bit is "0".
"DEFECT OFF" means that switches DS1 and DS2 don't turn on when the corresponding bit
is "1". Though the "DEFECT OFF" bit is set, the output at pin 20 is defect signal (in defect
signal output mode).
DRT (pin 20) outputs defect signal when the corresponding bit is "0", and outputs direction
signal when the corresponding bit is "1".
TM7 can turn on only when COUT is high.
The value of two current sources over switch FS1 are 18
µ
A(source) 36
µ
A(sink) when the
corresponding bit is "1", and are 9
µ
A(source) 18
µ
A(sink) when the corresponding bit is "0".
The current values through switches TM3, TM4, TM5 and TM6 can be selected in four steps.
The speed of Mirror circuit can be selected in three steps. Don't use D3 = "1", D2 = "0" mode.

HA12188AF
Rev.1, Oct. 1995, page 11 of 35
Table 2
Access Control Mode
ST3
D3
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
DATA
ST1
ST2
D2
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
D1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
D0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
TM5 TM4 TM3 TM2 TM1 TM6 TM5 TM4 TM3 TM2 TM1 TM6 TM5 TM4 TM3 TM2 TM1
$20
$21
$22
$23
$24
$25
$26
$27
$28
$29
$2A
$2B
$2C
$2D
$2E
$2F
TM6
A circle means that the switch is ON.
Note:
After the microprocessor sends serial data, TM1 to TM6 can be switched among the states listed
under ST1 to ST3 by input at the DC pin. First, if the microprocessor sends serial data when DC is
high, TM1 to TM6 are placed in the state listed under ST1. When DC is brought low, the states
change to the states listed under ST2. Then if DC is brought high again, the states change to the
states listed under ST3.

HA12188AF
Rev.1, Oct. 1995, page 12 of 35
Table 2-A
Access Control Mode Appendix
1) Tracking servo
DATA
Tracking servo movement
D3
D2
at DC = H (ST1)
0
0
Servo loop off
0
1
Servo loop on
1
0
Servo loop off jump to outside track
1
1
Servo loop off jump to inside track
2) Sled servo
DATA
Sled servo movement
D1
D0
at DC = H (ST1)
0
0
Servo loop off
0
1
Servo loop on
1
0
Servo loop off move to outside track
1
1
Servo loop off move to inside track
HA12188AF
Rev.1, Oct. 1995, page 13 of 35
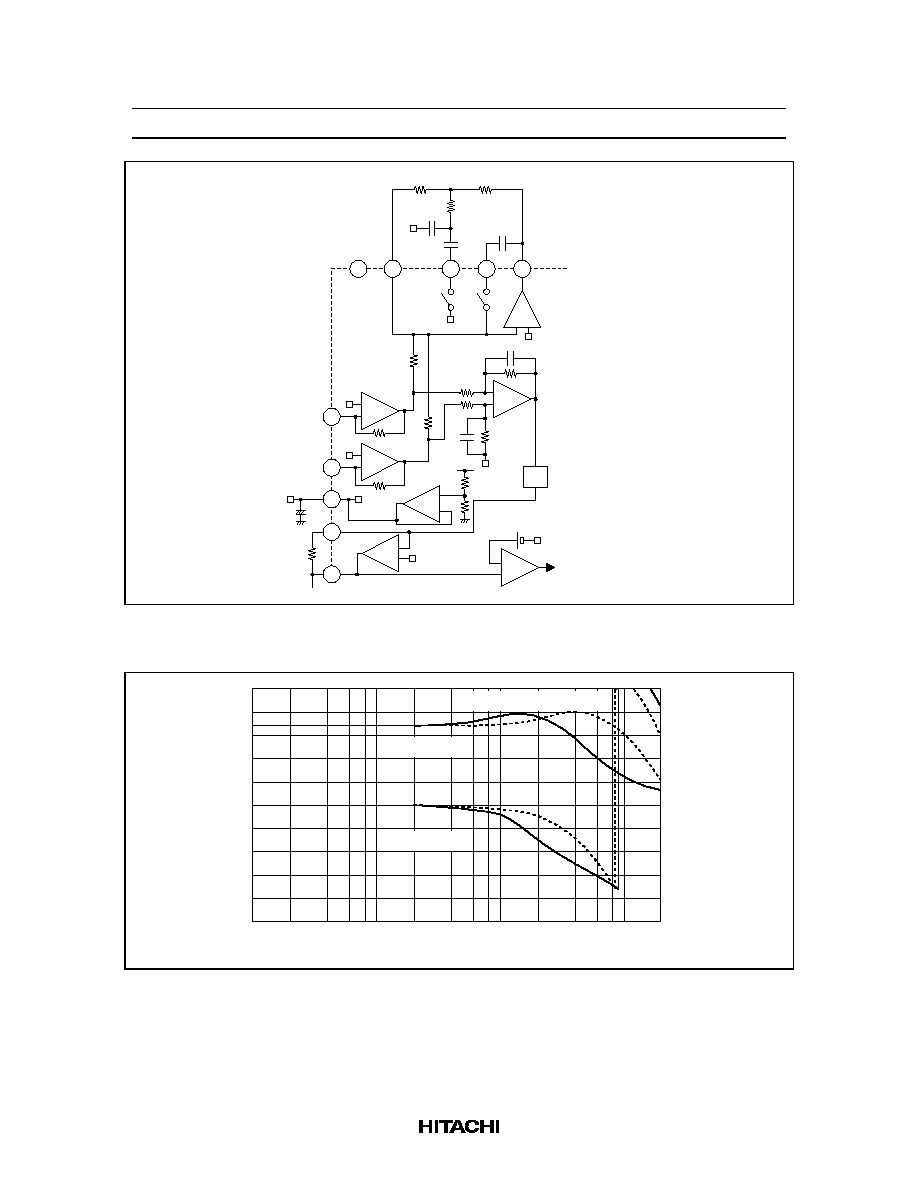
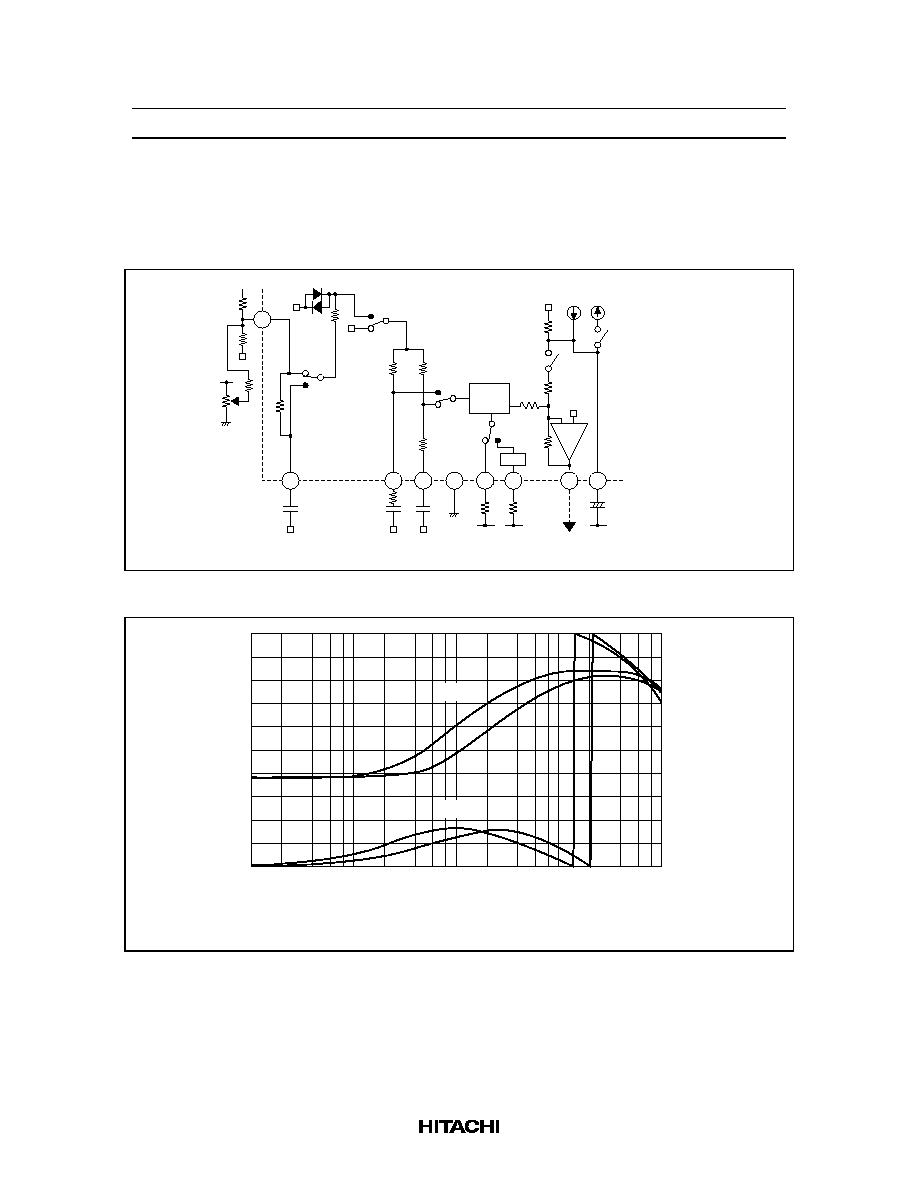
2. RF and Focus Error Pre-Amplifiers
The main beam output signals from the photodiode IC are led in through resistors at pins 43 and 44. The
outputs of amplifiers RF1 and RF2 are summed by amplifier RFS to generate the EFM RF signal. (*1)
External resintances of pins 43 and 44 and amplifier RFS should be set according to the pick-up so that the
RF signal at pin 38 is about 1.5 V
OP
(the difference between the peak level of 11T signal component and the
voltage at no signal).
Switches RS1 and RS2 operate together under microprocessor control. For example they are on for normal
or double speed, and off for quadruple speed. ON resistance of RS1 is 1.1k
typ and on resistance of RS2
is 530
typ.
Figure 3-A shows the frequency characteristic at pin 38 in the condition of figure 3.(Input resistances of
pins 43 and 44 are 10k
.)
External resistances and capacitances should be fitted according to the pick-up. Stray capacitances of board
print patterns have influence on this frequency characteristic. Therefore external resistances and
capacitances should be set considering stray capacitances.
Amplifier FE subtracts the output of amplifier RF2 from the output of amplifier RF1 to generate the focus
error signal. The gain is 0dB. The focus error signal is output as the output of amplifier FA at pin 55, with a
gain set by variable resistor VR and the external resistance values. With the external resistors in figure 3,
the gain of amplifier FA is 8.7dB (initial value after reset).
Variable resistor VR is controlled by 3-bit data. The gain can be varied from ≠5dB to +7dB with respect to
the reset value.
The focus error signal is binarized by comparator FZC, with a Vth equal to V
C
+ 0.38V.
A reference voltage of 1/2 V
CC
is output at pin 45. The IC's internal reference voltage is connected
internally.
The feedback resistance of amplifier FA should be set according to the pick-up so that the focus S-curve at
pin 55 is about 3V peak-to-peak.
Note: 1
The sink current of amplifier RFS is about 1mA. When load capacitance of pin 38 is big because
of wiring with CD DSP LSI etc, please use buffer amplifier. (for example emitter follower
transistor)
HA12188AF
Rev.1, Oct. 1995, page 14 of 35
RF1
RF2
FE
FZC
RFS
V
CC
RS2
RS1
VR
38
39
41
42
44
43
40
≠ +
≠
+
≠
+
≠
+
45
55
≠
+
≠
54
FA
V
C
15 k
+
1.8 k
8.2 k
5 k
8.1 p
160 k
160 k
160 k
10 k
10 k
8.1 p
160 k
5.5 k
5 k
≠
+
1.5 k
22 p
24 p
2 p
+
100
µ
Unit R :
C : F
Figure 3 RF and Focus Error Pre-Amplifiers
Gain (dB)
20
10
0
≠10
≠20
≠30
10k
100k
1M
10M
Frequency (Hz)
Phase (deg)
180
144
108
72
36
0
≠36
≠72
≠108
≠144
≠180
2M
4M
Phase
Gain
RS1,2 ON
OFF
Figure 3-A Frequency characteristic example of RF preamplifiers
HA12188AF
Rev.1, Oct. 1995, page 15 of 35
GF2 GF1
GF0
5.2 k 12.5 k 27.6 k 9.7 k
Unit R :
Figure 4 Focus VR
Table 3
Focus VR and Gain
D2
D1
D0
VR
Gain
0
1
0
9.7k
≠4.8dB
0
1
1
7.2k
≠2.2dB
0
0
0
5.5k
±0dB
0
0
1
4.6k
+1.6dB
1
1
0
3.4k
+3.8dB
1
1
1
3k
+4.9dB
1
0
0
2.7k
+6.0dB
1
0
1
2.4k
+6.8dB
HA12188AF
Rev.1, Oct. 1995, page 16 of 35
3. Tracking Pre-Amplifiers
The sub-beam outputs from the photodiode IC are led in through resistors at pins 48 and 49.
External resistances of pins 48 and 49 and amplifier TE should be set according to the pick-up so that the
traverse signal at pin 52 is about 2 V
PP
.
After a reset, the initial value of the feedback resistance BAL from amplifier TR1 to pin 48 is 400k
, the
same as the feedback resistance from amplifier TR2 to pin 49.
BAL has a variable resistance value that is controlled by 4-bit data. The variable range is from ≠32% to
+28% of the reset value. This resistance can be varied to adjust the EF balance of the tracking error.
Amplifier TE generates the tracking error signal. Its input signals are received from the preceding stage
through variable resistors VR. With the external resistor values in figure 5, after a reset, the initial value of
the gain is 8.8dB.
The variable VR resistance is controlled by 3-bit data. The gain can be varied from ≠5dB to +7dB with
respect to the reset value.
The tracking error signal is coupled through a capacitor to input pin 53 and binarized by comparator TZC,
with a Vth equal to V
C
. (*1)
Note: 1
At normal speed the output of amplifier TE contains much EFM signal components. Therefore
the output of amplifier TE had better be led in through LPF for reduction of EFM signal
components at pin 53.
TR1
TR2
TE
TZC
BAL
48
49
50
≠
+
VR
≠
+
51
52
≠
+
≠ +
53
62 k
62 k
75 k
VR
3.6 p
3.6 p
400 k
0.022
µ
Unit R :
C : F
Figure 5 Tracking Pre-Amplifiers

HA12188AF
Rev.1, Oct. 1995, page 17 of 35
BAL3 BAL2 BAL1 BAL0
80 k
32 k
16 k
20 k
40 k
80 k
160 k
Unit R :
Figure 6 BAL
GT2 GT1
GT0
21.7 k 51.7 k 114 k 40 k
Unit R :
Figure 7 Tracking VR
Table 4
Tracking VR Values and Gain
D2
D1
D0
VR
Gain
0
1
0
40k
≠4.9dB
0
1
1
29.6k
≠2.3dB
0
0
0
22.6k
±0dB
0
0
1
18.8k
+1.6dB
1
1
0
14.1k
+3.9dB
1
1
1
12.5k
+4.9dB
1
0
0
11.1k
+6.1dB
1
0
1
10.1k
+6.9dB
HA12188AF
Rev.1, Oct. 1995, page 18 of 35
Table 5
BAL Values
D3
D2
D1
D0
BAL
Ratio
1
0
0
0
272k
≠32%
1
0
0
1
288k
≠28%
1
0
1
0
304k
≠24%
1
0
1
1
320k
≠20%
1
1
0
0
336k
≠16%
1
1
0
1
352k
≠12%
1
1
1
0
368k
≠8%
1
1
1
1
384k
≠4%
0
0
0
0
400k
±0%
0
0
0
1
416k
+4%
0
0
1
0
432k
+8%
0
0
1
1
448k
+12%
0
1
0
0
464k
+16%
0
1
0
1
480k
+20%
0
1
1
0
496k
+24%
0
1
1
1
512k
+28%
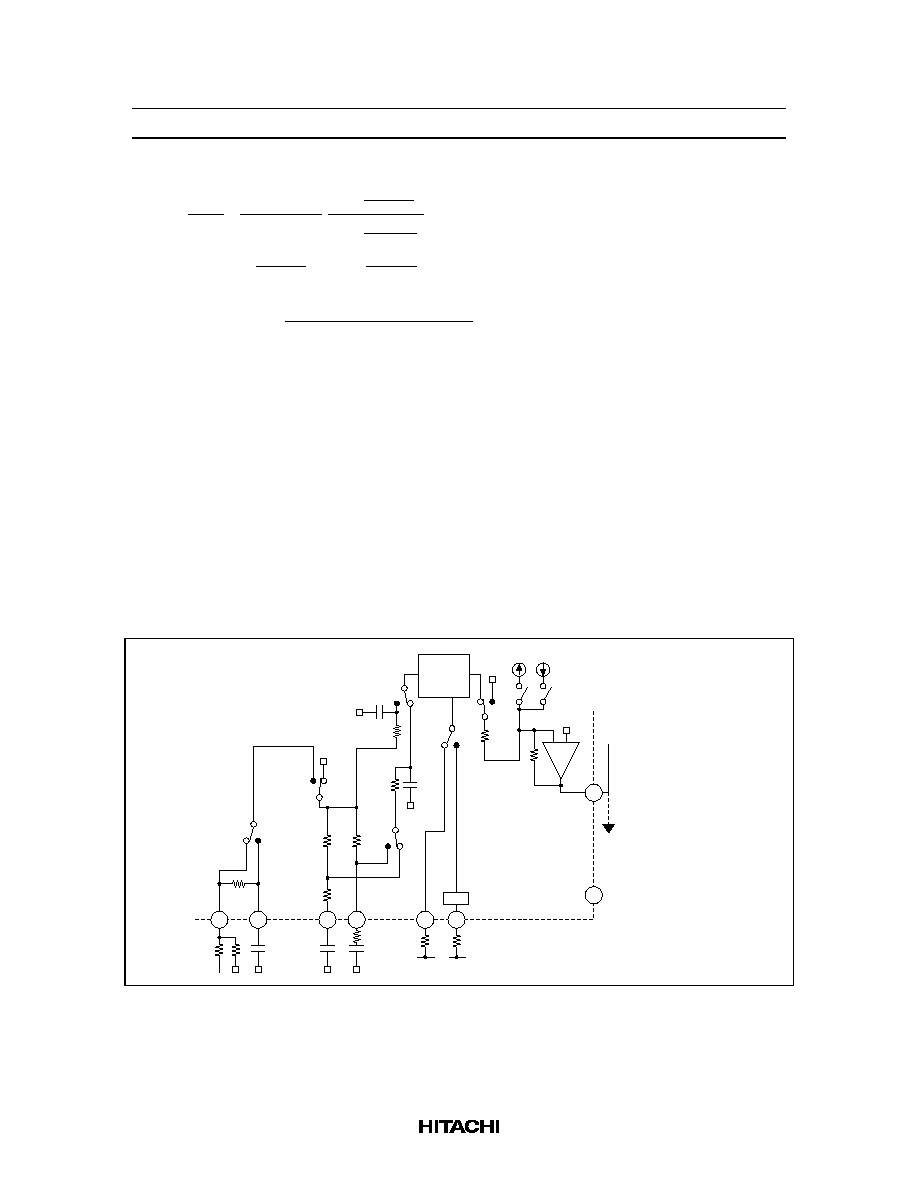
4. FOK Detector
This detector is a comparator that generates the FOK signal. FOK is one of the signals that determines
when to activate the focus servo. When the voltage at pin 38 exceeds the voltage at pin 34 by
approximately 0.4V, pin 32 goes high.
FOK
≠
+
31
34
32
30 29
33
Defect
Mirror
0.033
µ
0.015
µ
0.015
µ
Unit C : F
Figure 8 Mirror, FOK, and Defect Detectors

HA12188AF
Rev.1, Oct. 1995, page 19 of 35
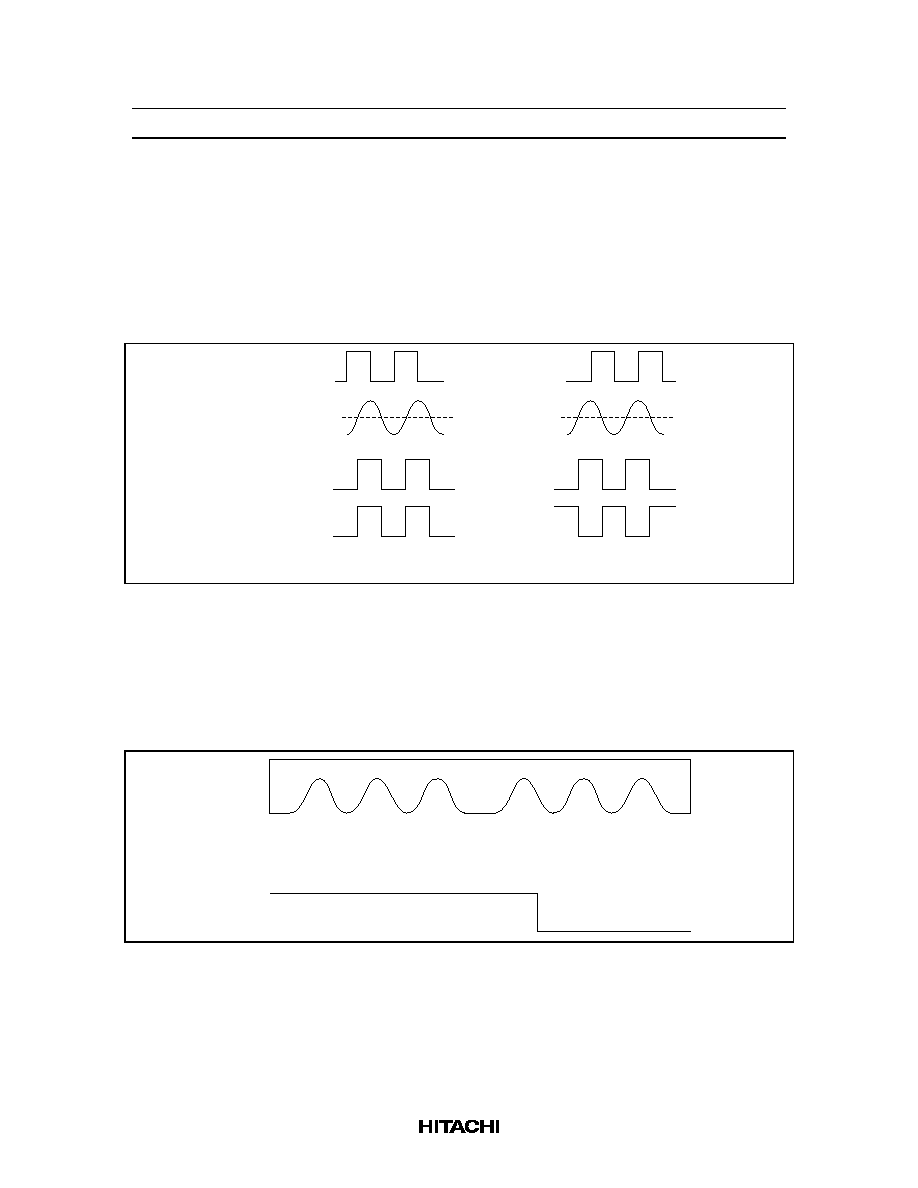
5. Defect Detector
When a scratched disc is played, the EFM RF signal has the shape shown in figure 9 (a). The defect
detector detects the drop-out area of this signal. Scratches with dimensions of about 100
µ
m or greater are
detected.
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;
(a) Pin 38
(b) Pin 20
Figure 9 Defect Detector Waveforms
6. Mirror Detector
As the pick-up travels across tracks, the EFM RF signal varies as in figure 10 (a). At pin 34, the signal
varies as in figure 10 (b). The mirror detector detects the mirror areas. The external capacitor on pin 33
integrates the track-crossing frequency component.
The internal time constant of the mirror detector can be set for normal, double, or quadruple speed by
microprocessor commands, to raise the trackable range of track-crossing frequencies.
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;
(a) Pin 38
(b) Pin 34
(c) Mirror signal
(internal signal)
Figure 10 Mirror Detector Waveforms

HA12188AF
Rev.1, Oct. 1995, page 20 of 35
7. Bias
The 12-k
external resistor on pin 36 sets the reference value of the IC's internal bias current. Use only
this resistance value. The IC will not operate correctly with other resistance values.
Pin 35 is for a bypass capacitor to eliminate noise from the IC's internal bias circuits.
Bias
35
36
12 k
0.1
µ
Unit R :
C : F
Figure 11 Bias
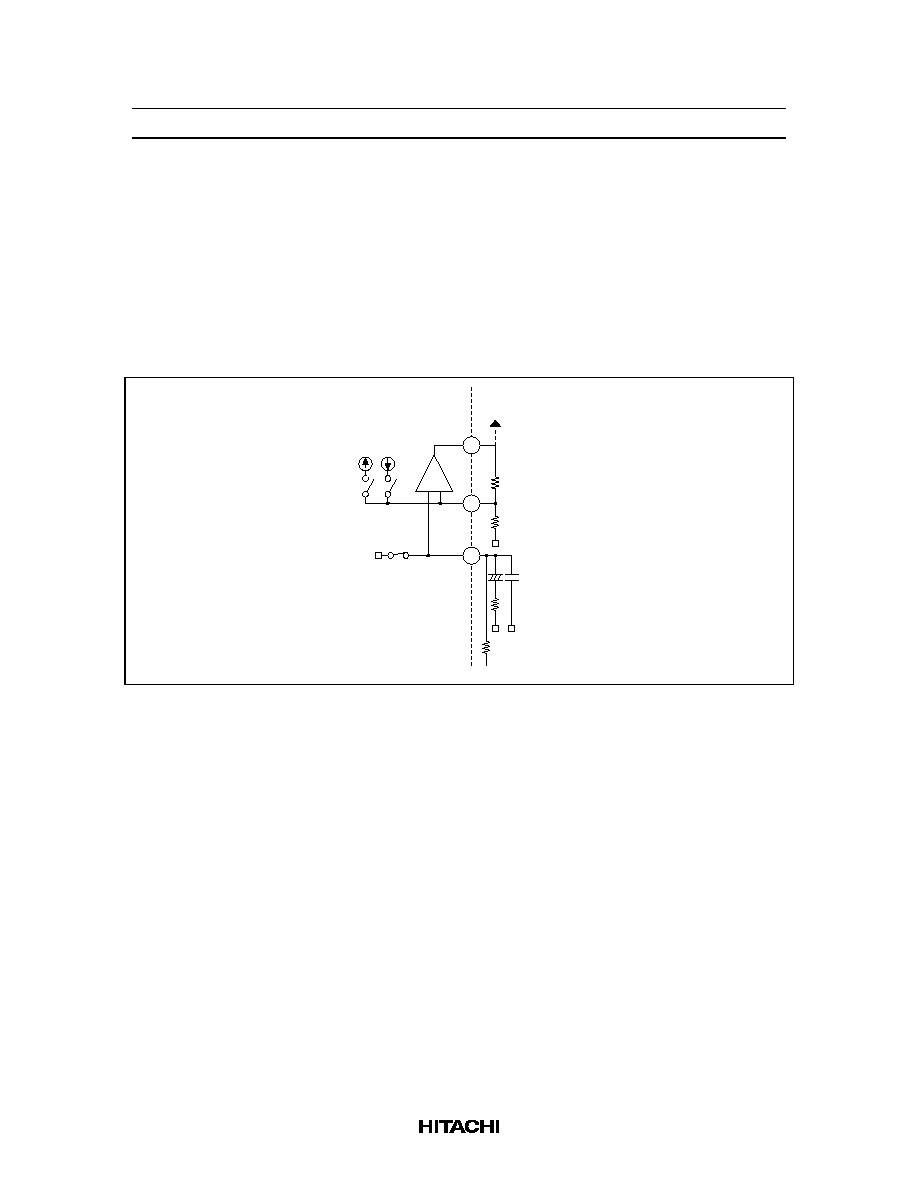
8. APC
This circuit is for the Psub laser diode. The APC circuit is switched off when pin 28 is high.
APC
LDS
46
47
28
≠
+
1 k
Unit R :
Figure 12 APC
9. Focus Servo System
The focus error signal is led in through a gain-control resistor to pin 56. Focus bias is adjusted at pin 56.
When a defect is detected, switch DS2 propagates the focus error signal, which is integrated by an internal
resistor and external capacitor. Switch DS2 also inverts the phase of the propagated signal.
Switch FS4 is the focus servo loop switch.
Switch FLS switches low frequency filter, thereby switching the AC gain of the servo.
Switch FPS switches the peak phase-compensation frequency. This switch is linked with switch FLS and
tracking servo switches TLS and TPS. For example this switch is off at normal, double speed and is on at
quadruple speed.
The DC gain from input at pin 56 to output at pin 9 is 19dB. Figure 14 shows the frequency characteristic
when pin 4, 5 are open.
HA12188AF
Rev.1, Oct. 1995, page 21 of 35
Switch FS1 switches a current source to generate the focus search voltage. When switch FS2 is switched
on, focus is acquired by switching switch FS1 on and off.
The current through switch FS1 can be switched in two stages: 36
µ
A sink/18
µ
A source, and 18
µ
A
sink/9
µ
A source.
FS4
FS2
FS1
FSA
DS2
FPS
FLS
FAC
DRIV.
10
µ
330 k 330 k
56
1
5
6
4
7
8
9
≠ +
+
10
Phase
compen.
18
µ
/
9
µ
7 k
20 k
30 k
90 k
150 k
22 k
470 k
0.1
µ
0.047
µ
0.047
µ
Focus
bias adj.
20 k
91 k
◊
2.7
Unit R :
C : F
36
µ
/
18
µ
Figure 13 Focus Servo
Gain
Phase
Gain (dB)
50
40
30
20
10
0
10
100k
100
1k
2k
4k
10k
Frequency (Hz)
Phase (deg)
180
108
0
≠108
≠180
Note:
Peak frequency of phase compensation is inversely proportional to external resistance value
(330k
at this figure) of pin 7, 8.(dot line : $40 mode, solid line : $42 mode)
Figure 14 Focus Servo Frequency Characteristic (pin 4, 5 are open)
HA12188AF
Rev.1, Oct. 1995, page 22 of 35
The transform function of phase compen block at figure 13 is as follows.
VOUT
VIN
8.95
1+j
(2.7
◊
10
≠6
)
1+j
1+j
7.9
◊
10
≠9
I
(
5.6
◊
10
≠10
I
(
)
)
¯
tan
-1
7.9
◊
10
≠9
I
(
)
≠tan
-1
5.6
◊
10
≠10
I
≠tan
-1
(2.7
◊
10
≠6
)
(
)
at FPS OFF
I
7
or I
8
V
CC
≠ 0.71V
External resistance value of pin 7 or 8
I = I
7
at FPS ON
I = 2.7 I
8
10. Tracking Servo System
The tracking error signal is led in through a gain-control resistor to pin 2.
When a defect is detected, switch DS1 propagates the tracking error signal, which is integrated by an
internal resistor and external capacitor. Switch DS1 also inverts the phase of the propagated signal.
Switch TM1 is the tracking servo loop switch.
Switch TLS switches low frequency filter, thereby switching the AC gain of the servo.
The purpose of switch THS is to raise the high-frequency gain.
Switch TPS switches the peak phase-compensation frequency. This switch is linked with switch TLS and
focus servo switches FLS and FPS. For example this switch is off at normal, double speed and is on at
quadruple speed.
Switch TM7 is turned on by taking the logical AND of COUT and microprocessor data, to improve the
performance of the pick-up. COUT is a signal generated by latching Mirror with both edges of TZC.
DS1
V
CC
TM1
THS
TM3 TM4
TM7
TSA
TPS
TLS
TAC
DRIV.
2
15
3
11
12
13
14
≠ +
16
Phase
compen.
22 k
100 k
100 k
100 k
167 k
100 k
33 k
470 k
0.1
µ
0.1
µ
0.1
µ
18 p
18 p
330 k 330 k
Unit R :
C : F
◊
2.7
Figure 15 Tracking Servo

HA12188AF
Rev.1, Oct. 1995, page 23 of 35
Gain (dB)
50
40
30
20
10
0
10
100k
100
1k
2k
4k
10k
Frequency (Hz)
Phase (deg)
180
108
0
≠108
≠180
Phase
Gain
Note:
Peak frequency of phase compensation is inversely proportional to external resistance value
(330k
at this figure) of pin 13, 14. (dot line : $40 mode, solid line : $42 mode)
Figure 16 Tracking Servo Frequency Characteristic (pin 11, 12 are open)
The transform function of phase compen block at figure 15 is as follows.
VOUT
VIN
4.47
1+j
1+j
7.9
◊
10
≠9
I
(
5.6
◊
10
≠10
I
(
)
)
¯
tan
-1
7.9
◊
10
≠9
I
(
)
≠tan
-1
5.6
◊
10
≠10
I
(
)
at TPS OFF
at TPS ON
I
13
or I
14
V
CC
≠ 0.71V
External resistance value of pin 13 or 14
I = I
13
I = 2.7 I
14
HA12188AF
Rev.1, Oct. 1995, page 24 of 35
Figure 17 shows the phase relationships of Mirror, the tracking error, TZC, and COUT. TM7 operates to
prevent the moving direction component of the tracking error signal from reaching the actuator.
The purpose of switches TM3 and TM4 is to generate the track jump voltage. A positive voltage appears at
pin 16 when TM3 is switched on. A negative voltage appears at pin 16 when TM4 is switched on.
The current values through switches TM3 and TM4 can be selected in four steps: 8
µ
A, 16
µ
A, 24
µ
A, and
32
µ
A. The DC gain from input at pin 2 to output at pin 16 is 13dB. Figure 16 shows the frequency
characteristic when pin 11, 12 are open.
Tracking error
Mirror
TZC
COUT
(a) Moving inward
(b) Moving outward
Figure 17 Phase Relationships of Mirror and Other Signals
11. DRT
DRT is an output signal that indicates the inward or outward direction. In the example in figure 18, DRT is
low during motion from outer toward inner tracks, and high for motion in the reverse direction. This signal
is output from pin 20 on command from the microprocessor.
RF
DRT
(moving outward)
(moving inward)
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;;;;;
;;;;;;;;;;
;;;;;;;;;;
;;;;;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
;;;;;;;
H
L
Figure 18 DRT
HA12188AF
Rev.1, Oct. 1995, page 25 of 35
12. Sled Servo
The signal output at pin 16 is passed through a low-pass filter and input at pin 17. TM2 is the loop switch
of the sled servo.
TM5 and TM6 are current switches that generate voltages for large movements of the sled. A positive
voltage appears at pin 19 when TM5 is switched on. A negative voltage appears at pin 19 when TM6 is
switched on.
The current values through switches TM5 and TM6 can be selected in four steps: 8
µ
A, 16
µ
A, 24
µ
A, and
32
µ
A.
TM5 TM6
TM2
SSA
SLM
DRIV.
17
18
+
19
≠
+
56 k
6.8 k
0.22
µ
12 k
82 k
22
µ
Unit R :
C : F
TM2 on resistsnce 230
typ
Figure 19 Sled Servo
13. Direct Control
The switches in the tracking control and sled servo control blocks can be switched on and off by
microprocessor commands. TM1 to TM6 can also be controlled directly by the DC pin after input of serial
data from the microprocessor.
When the microprocessor sends a command from $20 to $2F as serial data with DC high, TM1 to TM6 are
placed in the states indicated under ST1 in table 2. Next, when DC is driven low, the states change to ST2.
When DC is brought high again, the states change to ST3.
Example of using the DC terminal for 1 track jump is as follows.
For inside track jump, after sending the $2C at DC = "H", when the TZC's rising edge is detected set DC =
"L" and set DC = "H" after a setting time.
For outside track jump, after sending the $28 at DC = "H", when the TZC's falling edge is detected, set DC
= "L" and set DC = "H" after a setting time.

HA12188AF
Rev.1, Oct. 1995, page 26 of 35
Test Circuit Diagram
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
V
CC
10 k
10 k
10 k
S22
S21
S20
S19
4 k7
51 k
6 k2
≠
+
≠
+
SSA
TM6
TM5
Logic
Input
I/F
Output
I/F
TM2
TM4
TM3
≠
+
+
≠
≠ +
+
≠
+
≠
+
≠
+
≠
+
≠
+
≠
+
≠
+
≠
≠
+
+
≠
0.015
µ
0.015
µ
Defect
FOK
Mirror
0.033
µ
S32
V
CC
10 k
V
IN
34
S34A
S34
0.1
µ
12 k
Bias
10 k
RFS
RS1
RS2
RF1
RF2
APC
VR
TR1
TR2
BAL
VR
VR
TE
TZC
FA
FZC
DS1
FS4
DS2
FLS
FS2
FPS
S2
200 k
V
CC
33 k
S9
4 k7
200 k
33 k
V
CC
V
CC
4 k7
S16
TSA
TM7
TLS
TPS
THS
TM1
FS1
FSA
S61
V61
S60
0.1
µ
V
IN
60
S56
15 k
S53
62 k
62 k
S49
390 k
390 k
S48
10
µ
S44
S43
10 k
10 k
Phase
compen.
Phase
compen.
5 k 6
S17
FE
V
CC
560
V
CC
2 k
2SB
561 c
◊
2.7
◊
2.7
≠
+
Unit R :
C : F
S55
39 k
S52
39 k
S38
4.7 k
0.1
µ

HA12188AF
Rev.1, Oct. 1995, page 27 of 35
Absolute Maximum Ratings
Item
Symbol
Value
Unit
Power supply voltage
V
CC
7
V
Power dissipation
P
T
550
mW
Operating temperature
Topr
≠20 to +75
∞C
Storage temperature
Tstg
≠55 to +125
∞C
Note: Recommended operating power supply voltage range: 5 ±0.5V.

HA12188AF
Rev.1, Oct. 1995, page 28 of 35
Electrical Characteristics (Ta = 25
∞
C, V
CC
= 5V)
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Pins
1.Current dissipation
I
CC
--
36
52
mA
No signal
15, 42
2.Reference voltage
V
C
2.3
2.5
2.7
V
I45 = ±5mA
45
RF amp.
3.Offset voltage
V
RF
≠65
0
65
mV
38
4.Max. output level H
V
RFH
4.2
--
--
V
S38,S43,S44,S61
V61 = 4.0V
38
5.Max. output level L
V
RFL
--
--
2.1
V
S38,S43,S44,S61
V61 = 1.0V
38
6.Voltage gain
G
VRF
10.0
12.0
14.0
dB
S43, S44, S60
V38/V
IN
60
38
Focus
error amp.
7.Offset voltage
V
FA
≠65
0
65
mV
55
8.Max. output level H
V
FAH
4.0
4.5
--
V
S44, S55, S61
V61 = 4.0V
55
9.Max. output level L
V
FAL
--
0.5
1.0
V
S43, S55, S61
V61 = 4.0V
55
10.Voltage gain 1
G
VFAI
6.7
8.7
10.7
dB
S43, S60
V55/V
IN
60
55
11.Voltage gain 2
G
VFA2
6.7
8.7
10.7
dB
S44, S60
V55/V
IN
60
55
Tracking
error amp.
12.Offset voltage
V
TE
≠50
0
50
mV
52
13.Max. output level H
V
TEH
4.0
4.5
--
V
S49, S52, S61
V61 = 4.0V
52
14.Max. output level L
V
TEL
--
0.5
1.0
V
S48, S52, S61
V61 = 4.0V
52
15.Voltage gain 1
G
VTE1
7.0
9.0
11.0
dB
S49, S60
V52/V
IN
60
52
16.Voltage gain 2
G
VTE2
7.0
9.0
11.0
dB
S48, S60
V52/V
IN
60
52
FOK
17.FOK Vth
V
FOK
0.25
0.38
0.50
V
S34, S61
when V32
4V
Min (V38 ≠ V34)
32
18."H" output voltage
V
FKH
4.7
--
--
V
S34, S61
32
19."L" output voltage
V
FKL
--
--
0.4
V
S32, S34, S61
32
Defect
20.Max operation frequency
F
DH
2
--
--
kHz
S43, S44, S60
20
21.Min operation frequency
F
DL
--
--
1
kHz
S43, S44, S60
20
22."H" output voltage
V
DFH
4.7
--
--
V
20
23."L" output voltage
V
DFL
--
--
0.4
V
S20
20
Note: All offset voltages are values referring to V
C
(pin 45)at XRST = "L".
HA12188AF
Rev.1, Oct. 1995, page 29 of 35
Electrical Characteristics (Ta = 25
∞
C, V
CC
= 5V) (cont)
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Pins
Defect
24.Operation min input level
V
DF1
0.75
--
--
VPP
S43, S44, S60
20
25.operation max input level
V
DF2
--
--
2.5
VPP
S43, S44, S60
20
COUT
26.Max operation frequency
F
CO
100
--
--
kHz
S34A, S53, S60 *
1
Mirror Qudruple
mode
21
27."H" output voltage
V
COH
4.7
--
--
V
21
28."L" output voltage
V
COL
--
--
0.4
V
S21
21
CLK,
DATA,
XLT, DC,
XRST
29."H" input level
V
MH
4.0
--
--
V
23 to
27
30."L" input level
V
ML
--
--
1.0
V
23 to
27
APC
31.APC voltage
V
APC
0.09
0.16
0.23
V
46
32.TZC Vth
V
TZC
≠40
0
40
mV
S53, S61
Refer to V53
53
33.FZC Vth
V
FZC
0.25
0.38
0.50
V
S43, S61
55
Focus
servo
amp.
34.Offset voltage
V
FO
≠100
0
100
mV
9
35.Max output level H
V
FOH
4.0
4.5
--
V
S9, S56, S61
FS4 on, V61 = 1.0V
9
36.Max output level L
V
FOL
--
0.8
1.0
V
S9, S56, S61
FS4 on, V61 = 4.0V
9
37.Voltage gain
G
VFO
16.9
18.9
20.9
dB
S56, S60
V9/V
IN
60
FS4, FLS, FPS on
9
38.Search voltage 1
V
S1
≠0.70
≠0.51
≠0.32
V
FS2 on
V9 ≠ V
FO
≠ V
C
9
39.Search voltage 2
V
S2
0.32
0.51
0.70
V
FS2, FS1 on
V9 ≠ V
FO
≠ V
C
9
Tracking
servo
amp.
40.Offset voltage
V
TO
≠120
0
120
mV
16
41.Max output level H
V
TOH
4.0
4.5
--
V
S2, S16, S61
TM1 on, V61 = 1.0V
16
42.Max output level L
V
TOL
--
0.8
1.0
V
S2, S16, S61
TM1 on, V61 = 4.0V
16
Note:
90deg phase differnce between V
IN
34 and V
IN
60.

HA12188AF
Rev.1, Oct. 1995, page 30 of 35
Electrical Characteristics (Ta = 25
∞
C, V
CC
= 5V) (cont)
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Pins
Tracking
servo amp.
43.Voltage gain
G
VTO
11.4
13.4
15.4
dB
S2, S60
TLS, TPS, TM1 on
V16/V
IN
60
16
44.TM3 voltage
V
TM3
0.51
0.71
0.89
V
TM3 on
V16 ≠ V
TO
≠ V
C
16
45.TM4 voltage
V
TM4
≠0.89
≠0.71
≠0.51
V
TM4 on
V16 ≠ V
TO
≠ V
C
16
Sled servo
amp.
46.Offset voltage
V
SO
≠66
0
66
mV
19
47.Max output level H
V
SOH
4.0
4.5
--
V
S17, S19, S61
TM2 on V61 = 4.0V
19
48.Max output level L
V
SOL
--
0.8
1.0
V
S17, S19, S61
TM2 on, V61 = 1.0V
19
49.Voltage gain
G
VS
17.3
19.3
21.3
dB
S17, S60
TM2 on, V19/V
IN
60
19
50.TM5 voltage
V
TM5
0.55
0.85
1.10
V
16
µ
A mode
TM5 on
V19 ≠ V
SO
≠ V
C
19
51.TM6 voltage
V
TM6
≠1.10
≠0.85
≠0.55
V
16
µ
A mode
TM6 on
V19 ≠ V
SO
≠ V
C
19
SENS
52."H" output voltage
V
SEH
4.7
--
--
V
22
53."L" output voltage
V
SEL
--
--
0.4
V
S22
22
LDS
54."H" input voltage
V
LDH
3.5
--
--
V
28
55."L" input voltage
V
LDL
--
--
0.5
V
28
Focus VR
56.VR gain 1
G
FVR1
≠5.8
≠4.8
≠3.8
dB
S43, S60
V55 / V
IN
60 ≠ G
VFA1
55
57.VR gain 2
G
FVR2
≠3.2
≠2.2
≠1.2
dB
S43, S60
V55 / V
IN
60 ≠ G
VFA1
55
58.VR gain 3
G
FVR3
2.8
3.8
4.8
dB
S43, S60
V55 / V
IN
60 ≠ G
VFA1
55
59.VR gain 4
G
FVR4
5.8
6.8
7.8
dB
S43, S60
V55 / V
IN
60 ≠ G
VFA1
55
Tracking
VR
60.VR gain 1
G
TVR1
≠5.9
≠4.9
≠3.9
dB
S48, S60
V52 / V
IN
60 ≠ G
VTE2
52
61.VR gain 2
G
TVR2
≠3.3
≠2.3
≠1.3
dB
S48, S60
V52 / V
IN
60 ≠ G
VTE2
52
62.VR gain 3
G
TVR3
2.9
3.9
4.9
dB
S48, S60
V52 / V
IN
60 ≠ G
VTE2
52
63.VR gain 4
G
TVR4
5.9
6.9
7.9
dB
S48, S60
V52 / V
IN
60 ≠ G
VTE2
52

HA12188AF
Rev.1, Oct. 1995, page 31 of 35
Electrical Characteristics (Ta = 25
∞
C, V
CC
= 5V) (cont)
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Pins
BAL
64.BAL gain 1
G
BA1
≠4.2
≠3.2
≠2.2
dB
S48, S60
V52/V
IN
60 ≠ G
VTE2
52
65.BAL gain 2
G
BA2
≠3.7
≠2.7
≠1.7
dB
S48, S60
V52/V
IN
60 ≠ G
VTE2
52
66.BAL gain 3
G
BA3
≠3.2
≠2.2
≠1.2
dB
S48, S60
V52/V
IN
60 ≠ G
VTE2
52
67.BAL gain 4
G
BA4
≠2.4
≠1.4
≠0.4
dB
S48, S60
V52/V
IN
60 ≠ G
VTE2
52
68.BAL gain 5
G
BA5
1.1
2.1
3.1
dB
S48, S60
V52/V
IN
60 ≠ G
VTE2
52
Mirror
69.Operation min input level
V
MI1
0.25
--
--
V
PP
S34A, S53, S60
Quadraple mode
21
70.Operation max input
level
V
MI2
--
--
2.5
V
PP
S34A, S53, S60
Quadraple mode
21
Test Method Notes
Item No.
Notes
1
I15 (I15 means "current at pin 15". Following expressions are same as this expression.)+ I42
2
V45 (V45 means "voltage at pin 45". Following expressions are same as this expression.
These symbols mean DC voltage at DC measuring and AC voltage at AC measuring.)
3
V38 ≠ V
C
4, 5
V38
6
20log (V38 / V
IN
60) V
IN
60 = 500kHz, 0.2 V
PP
7
V55 ≠ V
C
8, 9
V55
10, 11
20log (V55 / V
IN
60) V
IN
60 = 4kHz, 0.5 V
PP
12
V52 ≠ V
C
13, 14
V52
15, 16
20log (V52 / V
IN
60) V
IN
60 = 4kHz, 0.5 V
PP
17
(V38 ≠ V34) at the point that V32 exceeds 4V when V61 is lowered from 2.5V.
18, 19
V32
20
The maximum frequency for VIN60 such that the pin 20 signal is still a square wave.
V
IN
60 = 0.25 V
PP
+ V
C
+ 95mV
DC
21
The minimum frequency for VIN60 such that the pin 20 signal is still a square wave.
V
IN
60 = 0.25 V
PP
+ V
C
+ 95mV
DC
22, 23
V20
HA12188AF
Rev.1, Oct. 1995, page 32 of 35
Test Method Notes (cont)
Item No.
Notes
24
The minimum voltage for V38 such that the pin 20 signal is still a square wave.
V
IN
60 = 1kHz + V
C
+ 95mV
DC
25
The maximum voltage for V38 such that the pin 20 signal is still a square wave.
V
IN
60 = 1kHz + V
C
+ 95 mV
DC
26
V
IN
60, V
IN
34 90deg phase difference input signal V
IN
60 = V
IN
34 = 1 V
PP
The maximum frequency for V
IN
60 (V
IN
34) such that the pin 21 signal is still a square wave.
27, 28
V21
29
H input voltage of pin 23 to 27
30
L input voltage of pin 23 to 27
31
V46
32
(V61 ≠ V53) such that V22 exceeds 4V when V61 is upped from 2.4V. (SENS = TZC mode)
33
(V55 ≠ V
C
) such that V22 exceeds 4V when V61 is upped from 2.5V. (SENS = FZC mode)
34
V9 ≠ V
C
35, 36
V9
37
20log (V9 / V
IN
60) V
IN
60 = 1kHz, 0.15 V
PP
38, 39
V9 ≠ VFO ≠ V
C
40
V16 ≠ V
C
41, 42
V16
43
20log (V16 / V
IN
60) V
IN
60 = 1kHz, 0.3 V
PP
44, 45
V9 ≠ VTO ≠ V
C
46
V19 ≠ V
C
47, 48
V19
49
20log (V19 / V
IN
60) V
IN
60 = 4kHz, 0.15 V
PP
50, 51
V19 ≠ VSO ≠ V
C
52, 53
V22
54
Input voltage of pin 28 such that APC is off.
55
Input voltage of pin 28 such that APC is on.
56
GF2 = 0,
GF
1 = 1, GF0 = 0 20log (V55 / V
IN
60) ≠ G
VFA1
V
IN
60 = 4kHz, 0.5 V
PP
57
GF2 = 0,
GF
1 = 1, GF0 = 1 20log (V55 / V
IN
60) ≠ G
VFA1
V
IN
60 = 4kHz, 0.5 V
PP
58
GF2 = 1,
GF
1 = 1, GF0 = 0 20log (V55 / V
IN
60) ≠ G
VFA1
V
IN
60 = 4kHz, 0.5 V
PP
59
GF2 = 1,
GF
1 = 0, GF0 = 1 20log (V55 / V
IN
60) ≠ G
VFA1
V
IN
60 = 4kHz, 0.5 V
PP
60
GT2 = 0,
GT
1 = 1, GT0 = 0 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5 V
PP
61
GT2 = 0,
GT
1 = 1, GT0 = 1 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5 V
PP
62
GT2 = 1,
GT
1 = 1, GT0 = 0 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5 V
PP
63
GT2 = 1,
GT
1 = 0, GT0 = 1 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5 V
PP

HA12188AF
Rev.1, Oct. 1995, page 33 of 35
Test Method Notes (cont)
Item No.
Notes
64
BAL
3 = 1, BAL2 = 0, BAL1 = 0, BAL0 = 0 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5V
PP
65
BAL
3 = 1, BAL2 = 0, BAL1 = 0, BAL0 = 1 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5V
PP
66
BAL
3 = 1, BAL2 = 0, BAL1 = 1, BAL0 = 0 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5V
PP
67
BAL
3 = 1, BAL2 = 1, BAL1 = 0, BAL0 = 0 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5V
PP
68
BAL
3 = 0, BAL2 = 1, BAL1 = 1, BAL0 = 1 20log (V52 / V
IN
60) ≠ G
VTE2
V
IN
60 = 4kHz, 0.5V
PP
69
The minimum input voltage for VIN34 such that the pin 21 signal is still a square wave.
V
IN
60 = 1MHz, 1 V
PP
V
IN
34 = 100kHz
70
The maximum input voltage for VIN34 such that the pin 21 signal is still a square wave.
V
IN
60 = 1MHz, 1 V
PP
V
IN
34 = 100kHz
HA12188AF
Rev.1, Oct. 1995, page 34 of 35
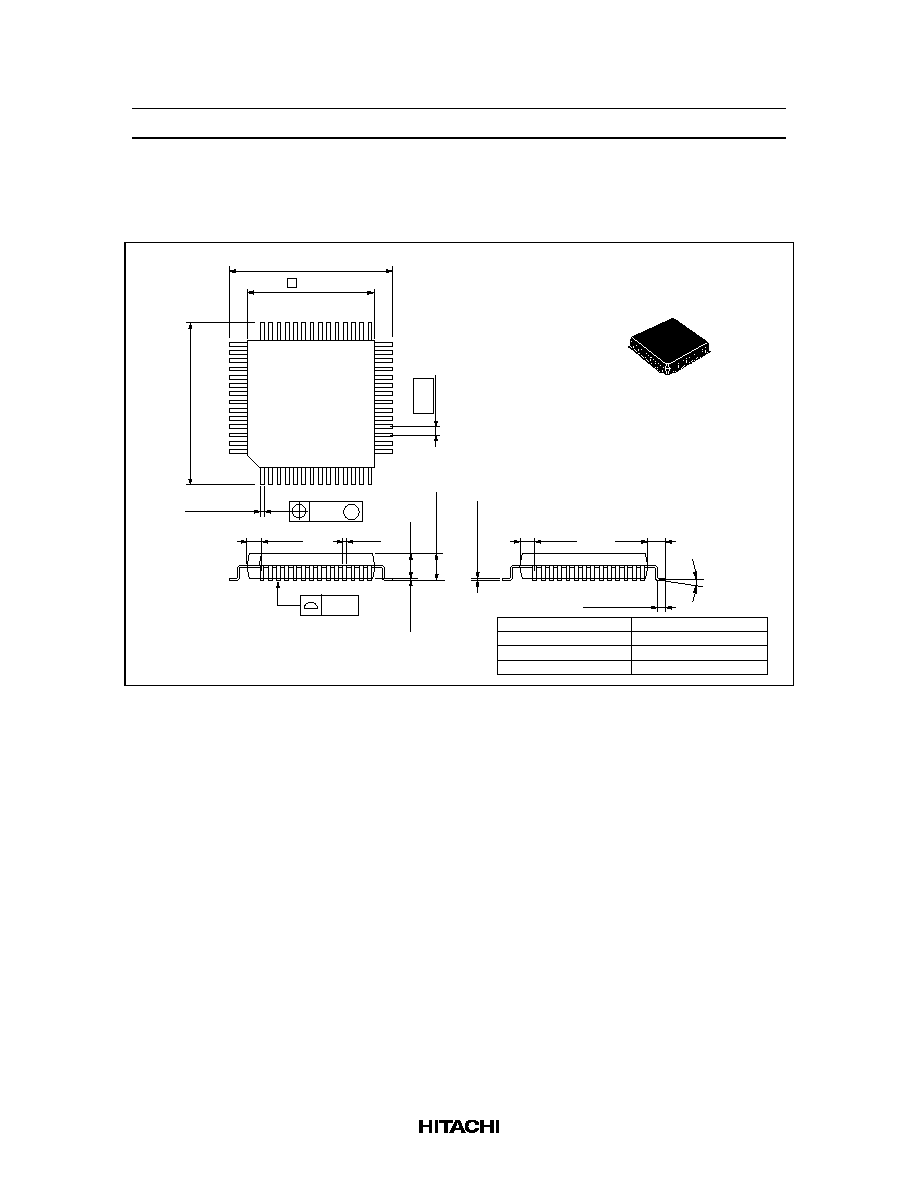
Package Dimensions
Unit: mm
0.13
M
0 ≠ 8∞
12.8 ± 0.3
10.0
0.32 ± 0.08
0.65
0.17 ± 0.05
2.54 Max
12.8 ± 0.3
42
29
43
1
14
15
28
56
0.10
1.40
0.60 ± 0.15
0.1
+0.1 ≠0.09
0.775
0.775
Hitachi Code
JEDEC Code
EIAJ Code
Weight
FP-56
--
ED-7404A Mod.
0.51 g
0.30 ± 0.06
0.35
2.20
0.15 ± 0.04

HA12188AF
Rev.1, Oct. 1995, page 35 of 35
Disclaimer
1. Hitachi neither warrants nor grants licenses of any rights of Hitachi's or any third party's patent,
copyright, trademark, or other intellectual property rights for information contained in this document.
Hitachi bears no responsibility for problems that may arise with third party's rights, including
intellectual property rights, in connection with use of the information contained in this document.
2. Products and product specifications may be subject to change without notice. Confirm that you have
received the latest product standards or specifications before final design, purchase or use.
3. Hitachi makes every attempt to ensure that its products are of high quality and reliability. However,
contact Hitachi's sales office before using the product in an application that demands especially high
quality and reliability or where its failure or malfunction may directly threaten human life or cause risk
of bodily injury, such as aerospace, aeronautics, nuclear power, combustion control, transportation,
traffic, safety equipment or medical equipment for life support.
4. Design your application so that the product is used within the ranges guaranteed by Hitachi particularly
for maximum rating, operating supply voltage range, heat radiation characteristics, installation
conditions and other characteristics. Hitachi bears no responsibility for failure or damage when used
beyond the guaranteed ranges. Even within the guaranteed ranges, consider normally foreseeable
failure rates or failure modes in semiconductor devices and employ systemic measures such as fail-
safes, so that the equipment incorporating Hitachi product does not cause bodily injury, fire or other
consequential damage due to operation of the Hitachi product.
5. This product is not designed to be radiation resistant.
6. No one is permitted to reproduce or duplicate, in any form, the whole or part of this document without
written approval from Hitachi.
7. Contact Hitachi's sales office for any questions regarding this document or Hitachi semiconductor
products.
Sales Offices
Hitachi, Ltd.
Semiconductor & Integrated Circuits.
Nippon Bldg., 2-6-2, Ohte-machi, Chiyoda-ku, Tokyo 100-0004, Japan
Tel: Tokyo (03) 3270-2111 Fax: (03) 3270-5109
Copyright
Hitachi, Ltd., 2000. All rights reserved. Printed in Japan.
Hitachi Asia Ltd.
Hitachi Tower
16 Collyer Quay #20-00,
Singapore 049318
Tel : <65>-538-6533/538-8577
Fax : <65>-538-6933/538-3877
URL : http://www.hitachi.com.sg
URL
NorthAmerica
: http://semiconductor.hitachi.com/
Europe
: http://www.hitachi-eu.com/hel/ecg
Asia
: http://sicapac.hitachi-asia.com
Japan
: http://www.hitachi.co.jp/Sicd/indx.htm
Hitachi Asia Ltd.
(Taipei Branch Office)
4/F, No. 167, Tun Hwa North Road,
Hung-Kuo Building,
Taipei (105), Taiwan
Tel : <886>-(2)-2718-3666
Fax : <886>-(2)-2718-8180
Telex : 23222 HAS-TP
URL : http://www.hitachi.com.tw
Hitachi Asia (Hong Kong) Ltd.
Group III (Electronic Components)
7/F., North Tower,
World Finance Centre,
Harbour City, Canton Road
Tsim Sha Tsui, Kowloon,
Hong Kong
Tel : <852>-(2)-735-9218
Fax : <852>-(2)-730-0281
URL : http://www.hitachi.com.hk
Hitachi Europe Ltd.
Electronic Components Group.
Whitebrook Park
Lower Cookham Road
Maidenhead
Berkshire SL6 8YA, United Kingdom
Tel: <44> (1628) 585000
Fax: <44> (1628) 585160
Hitachi Europe GmbH
Electronic Components Group
Dornacher Straþe 3
D-85622 Feldkirchen, Munich
Germany
Tel: <49> (89) 9 9180-0
Fax: <49> (89) 9 29 30 00
Hitachi Semiconductor
(America) Inc.
179 East Tasman Drive,
San Jose,CA 95134
Tel: <1> (408) 433-1990
Fax: <1>(408) 433-0223
For further information write to:
Colophon 2.0