
HYNIX SEMICONDUCTOR
8-BIT SINGLE-CHIP MICROCONTROLLERS
HMS81004E
HMS81008E
HMS81016E
HMS81024E
HMS81032E
User's Manual
(Ver. 1.00)
Version 1.00
Published by
SP MCU Application Team
©
©
©
©
2001 Hynix Semiconductor, Inc. All right reserved.
Additional information of this manual may be served by Hynix Semiconductor offices in Korea or Distributors and Repre-
sentatives listed at address directory.
Hynix Semiconductor reserves the right to make changes to any information here in at any time without notice.
The information, diagrams and other data in this manual are correct and reliable; however, Hynix Semiconductor is in no
way responsible for any violations of patents or other rights of the third party generated by the use of this manual.

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
Table of Contents
1. OVERVIEW ...........................................1
Description .........................................................1
Features .............................................................1
Development Tools ............................................ 2
2. BLOCK DIAGRAM ..............................3
3. PIN ASSIGNMENT (Top View) ........... 4
4. PACKAGE DIMENSION .......................5
5. PIN FUNCTION .....................................8
6. PORT STRUCTURES .........................10
7. ELECTRICAL CHARACTERISTICS ...12
Absolute Maximum Ratings .............................12
Recommended Operating Conditions ..............12
DC Electrical Characteristics ............................12
REMOUT Port Ioh Characteristics Graph ........13
REMOUT Port Iol Characteristics Graph .........14
AC Characteristics ...........................................14
8. MEMORY ORGANIZATION ................16
Registers ..........................................................16
Program Memory .............................................19
Data Memory ....................................................22
List for Control Registers.................................. 23
Addressing Mode .............................................25
9. I/O PORTS ..........................................30
R0 Ports ........................................................... 30
R1 Ports ...........................................................30
R2 Port .............................................................32
10. CLOCK GENERATOR ......................33
Oscillation Circuit .......................................... 34
11. BASIC INTERVAL TIMER ................36
12. WATCH DOG TIMER .......................38
13. Timer0, Timer1, Timer2 ....................39
14. INTERRUPTS ...................................47
Interrupt priority and sources ........................ 48
Interrupt control register ................................ 48
Interrupt accept mode ................................... 49
Interrupt Sequence ........................................ 50
BRK Interrupt ................................................ 52
Multi Interrupt ................................................ 52
External Interrupt ........................................... 52
Key Scan Input Processing ........................... 53
15.STANDBY FUNCTION ......................55
Sleep Mode .................................................... 55
STOP MODE .................................................. 55
STANDBY MODE RELEASE ......................... 56
RELEASE OPERATION OF STANDBYMODE58
16. RESET FUNCTION ..........................60
EXTERNAL RESET ...................................... 60
POWER ON RESET ..................................... 60
Low Voltage Detection Mode ........................ 62
A. MASK ORDER SHEET ........................ i
B. INSTRUCTION .................................... ii
Terminology List ...............................................ii
Instruction Map ................................................. iii
Instruction Set ..................................................iv

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
1
HMS81004E/08E/16E/24E/32E
CMOS SINGLE- CHIP 8-BIT MICROCONTROLLER
FOR UNIVERSAL REMOTE CONTROLLER
1. OVERVIEW
1.1 Description
The HMS81004E/08E/16E/24E/32E is an advanced CMOS 8-bit microcontroller with 4/8/16/24/32K bytes of ROM. The
device is one of GMS800 family. The HYNIX HMS81004E/08E/16E/24E/32E is a powerful microcontroller which provides
a highly flexible and cost effective solution to many UR applications.The HMS81004E/08E/16E/24E/32E provides the fol-
lowing standard features: 4/8/16/24/32K bytes of ROM, 448 bytes of RAM, 8-bit timer/counter, on-chip oscillator and clock
circuitry. In addition, the HMS81004E/08E/16E/24E/32E supports power saving modes to reduce power consumption.
1.2 Features
∑ Instruction Cycle Time:
- 1us at 4MHz
∑ Programmable I/O pins
∑ Operating Voltage
- 2.0 ~ 3.6 V @ 4MHz (MASK)
- 2.0 ~ 4.0 V @ 4MHZ (OTP)
∑ Timer
- Timer / Counter ......... 16Bit * 1ch
......... 8Bit * 2ch
- Basic Interval Timer ...... 8Bit * 1ch
- Watch Dog Timer ............ 6Bit * 1ch
∑ 8 Interrupt sources
- Nested Interrupt control is available.
- External input: 2
- Keyscan input
- Basic Interval Timer
- Watchdog timer
- Timer : 3
∑ Power On Reset
∑ Power saving Operation Modes
- STOP Operation
- SLEEP Operation
∑ Low Voltage Detection Circuit
∑ Watch Dog Timer Auto Start (During 1second
after Power on Reset)
Device Name
ROM Size
EPROM Size
RAM Size
Package
HMS81004E
4K Bytes
-
448 Bytes
( included
256 bytes
stack memory )
20 SOP/PDIP
24 SOP/Skinny DIP
28 SOP/Skinny DIP
HMS81008E
8K Bytes
-
HMS81016E
16K Bytes
-
HMS81024E
24K Bytes
-
HMS81032E
32K Bytes
-
HMS81020TL
-
20K Bytes
HMS81032TL
-
32K Bytes
20 PIN
24 PIN
28 PIN
INPUT
3
3
3
OUTPUT
2
2
2
I/O
13
17
21
HMS81004E/08E/16E/24E/32E
2
JUNE 2001 Ver 1.00
1.3 Development Tools
The HMS81004E/08E/16E/24E/32E are supported by a full-fea-
tured macro assembler, an in-circuit emulator CHOICE-Dr.
TM
and OTP programmers. Macro assembler operates under the MS-
Windows 95/98
TM
/NT4/W2000.
Please contact sales part of HYNIX
Software
- MS- Window base assembler
- Linker / Editor / Debugger
Hardware
(Emulator)
- CHOICE-Dr.
- CHOICE-Dr. EVA 81C5EVA
OTP program-
mer
- Universal single programmer.
- 4 gang programmer
- stand alone
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
3
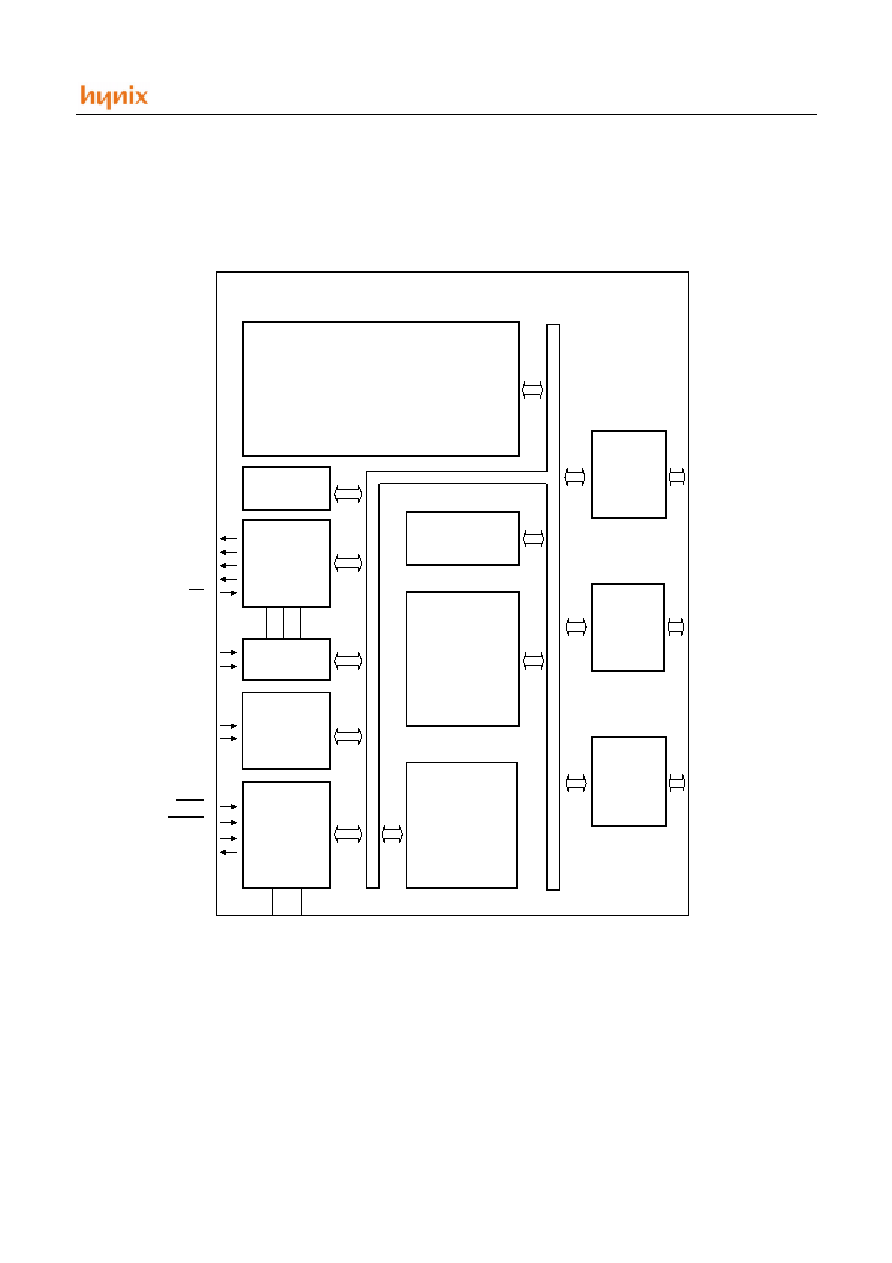
2. BLOCK DIAGRAM
G8MC
Core
RAM
(448byte)
ROM
(32kbyte)
Prescaler
&
B.I.T
Watchdog
Timer
Timer
Interrupt
Key Scan
INT.
Generation
Block
Clock Gen.
&
System
Control
R0
PORT
R1
PORT
R2
PORT
REMOUT
R17/T0
R16/T1
R15/T2
R14/EC
R12/INT2
R11/INT1
R00~R07
R10~R17
TEST
RESET
XIN
XOUT
R00~R07
R10~R17
R20~R24
VDD
VSS

HMS81004E/08E/16E/24E/32E
4
JUNE 2001 Ver 1.00
3. PIN ASSIGNMENT (Top View)
R13
R12
R11
R10
VDD
XOUT
XIN
R00
R01
R02
R03
R20
R21
R22
R14
R15
R16
R17
REMOUT
RESET
TEST
R07
R06
R05
R04
VSS
R24
R23
28PIN
1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
R13
R12
R11
R10
VDD
XOUT
XIN
R00
R01
R02
R03
R20
R14
R15
R16
R17
REMOUT
RESET
TEST
R07
R06
R05
R04
VSS
24PIN
1
2
3
4
5
6
7
8
9
10
11
12
24
23
22
21
20
19
18
17
16
15
14
13
R11
R10
VDD
XOUT
XIN
R00
R01
R02
R03
R20
R16
R17
REMOUT
RESET
TEST
R07
R06
R05
R04
VSS
20PIN
1
2
3
4
5
6
7
8
9
10
20
19
18
17
16
15
14
13
12
11

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
5
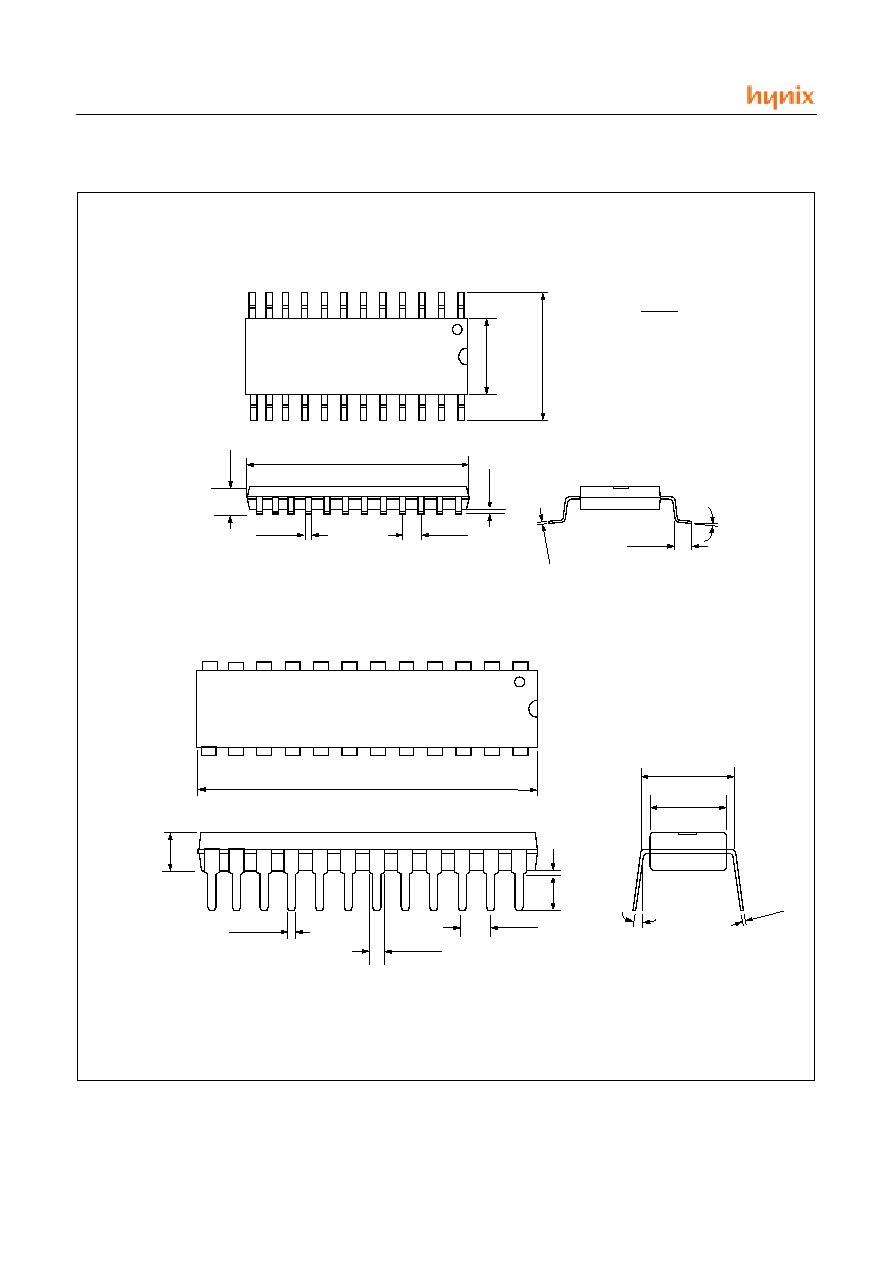
4. PACKAGE DIMENSION
1.043
0.021
0.065
0.100 BSC
0.300 BSC
0.270
0.012
0 ~ 15∞
MAX 0.180
MIN 0.015
0.140
0.512
0.020
0.050 BSC
0
.0
1
3
0 ~ 8∞
0.042
20 PDIP
20 SOP
UNIT: INCH
MAX
MIN
1.015
0.015
0.050
0.
120
0.245
0.008
0.229
0.
29
1
0.
419
0.
398
0.495
0.093
0.105
0.013
0.
0
1
2
0.
004
0
.0
0
8
0.016
HMS81004E/08E/16E/24E/32E
6
JUNE 2001 Ver 1.00
1.265
0.021
0.065
0.100 BSC
0.300 BSC
0.300
0.014
0 ~ 15∞
MAX 0.180
MIN 0.015
0.
140
0.614
0.020
0.050 BSC
0
.0
1
3
0 ~ 8∞
0.042
24 SKDIP
24 SOP
UNIT: INCH
MAX
MIN
1.160
0.015
0.045
0.120
0.250
0.008
0.
229
0.291
0.
41
9
0.
39
8
0.598
0.093
0.106
0.013
0.012
0.004
0
.0
0
8
0.016

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
7
1.375
0.021
0.055
0.100 BSC
0.300 BSC
0.300
0.014
0 ~ 15∞
MAX 0.180
MIN 0.015
0.
140
0.713
0.020
0.050 BSC
0
.0
1
3
0 ~ 8∞
0.042
28 SKDIP
28 SOP
UNIT: INCH
MAX
MIN
1.355
0.015
0.045
0.120
0.275
0.008
0.
229
0.291
0.
41
9
0.
39
8
0.697
0
.
093
0.106
0.013
0.012
0.004
0
.0
0
8
0.016
HMS81004E/08E/16E/24E/32E
8
JUNE 2001 Ver 1.00
5. PIN FUNCTION
V
DD
: Supply voltage.
V
SS
: Circuit ground.
TEST: Used for shipping inspection of the IC. For normal
operation, it should be connected to V
DD
.
RESET: Reset the MCU.
X
IN
: Input to the inverting oscillator amplifier and input to
the internal main clock operating circuit.
X
OUT
: Output from the inverting oscillator amplifier.
R00~R07: R0 is an 8-bit CMOS bidirectional I/O port. R0
pins 1 or 0 written to the Port Direction Register can be
used as outputs or inputs.
R10~R17: R1 is an 8-bit CMOS bidirectional I/O port. R1
pins 1 or 0 written to the Port Direction Register can be
used as outputs or inputs.
In addition, R1 serves the functions of the various follow-
ing special features .
R20~R24: R2 is an 8-bit CMOS bidirectional I/O port. R2
pins 1 or 0 written to the Port Direction Register can be
used as outputs or inputs .
Port pin
Alternate function
R11
R12
R14
R15
R16
R17
INT1 (External Interrupt input 1)
INT2 (External Interrupt input 2)
EC (Event Counter input )
T2 (Timer / Counter input 2)
T1 (Timer / Counter input 1)
T0 (Timer / Counter input 0)

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
9
PIN NAME
INPUT/
OUTPUT
Function
@RESET
@STOP
R00
I/O
- Each bit of the port can be individually configured as
an input or an output by user software
- Push-pull output
- CMOS input with pull-up resister (option)
- Can be programmable as key scan input
- Pull-up resisters are automatically disabled at output
mode
INPUT
State of
before
Stop
R01
I/O
R02
I/O
R03
I/O
R04
I/O
R05
I/O
R06
I/O
R07
I/O
R10
I/O
- Each bit of the port can be individually configured as
an input or an output by user software
- Push-pull output
- CMOS input with pull-up resister (option)
- Can be programmable as key scan input or open
drain output
- Pull-up resisters are automatically disabled at output
mode
- Direct driving of LED(N-Tr.)
INPUT
State of
before
Stop
R11/INT1
I/O
R12/INT2
I/O
R13
I/O
R14/EC
I/O
R15/T2
I/O
R16/T1
I/O
R17/T0
I/O
R20
I/O
- Each bit of the port can be individually configured as
an input or an output by user software
- Push-pull output
- CMOS input with pull-up resister (option)
- Pull-up resisters are automatically disabled at output
mode
- Direct driving of LED(N-Tr.)
INPUT
State of
before
Stop
R21
I/O
R22
I/O
R23
I/O
R24
I/O
XIN
I
Oscillator input
Low
XOUT
O
Oscillator output
High
REMOUT
O
High current output
`L' output
`L' output
RESET
I
Includes pull-up resistor
`L' level
state of
before stop
TEST
I
Includes pull-up resistor
VDD
P
Positive power supply
VSS
P
Groud
HMS81004E/08E/16E/24E/32E
10
JUNE 2001 Ver 1.00
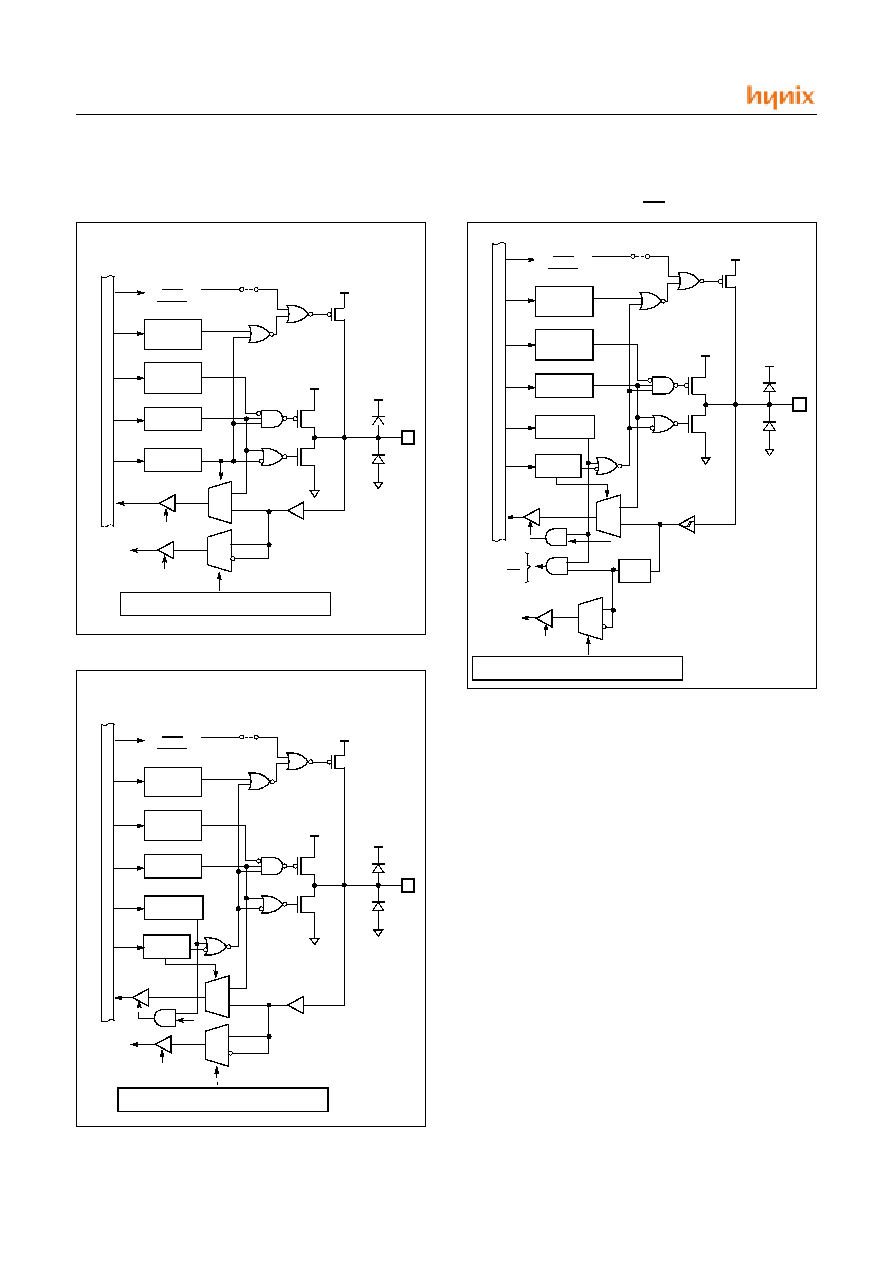
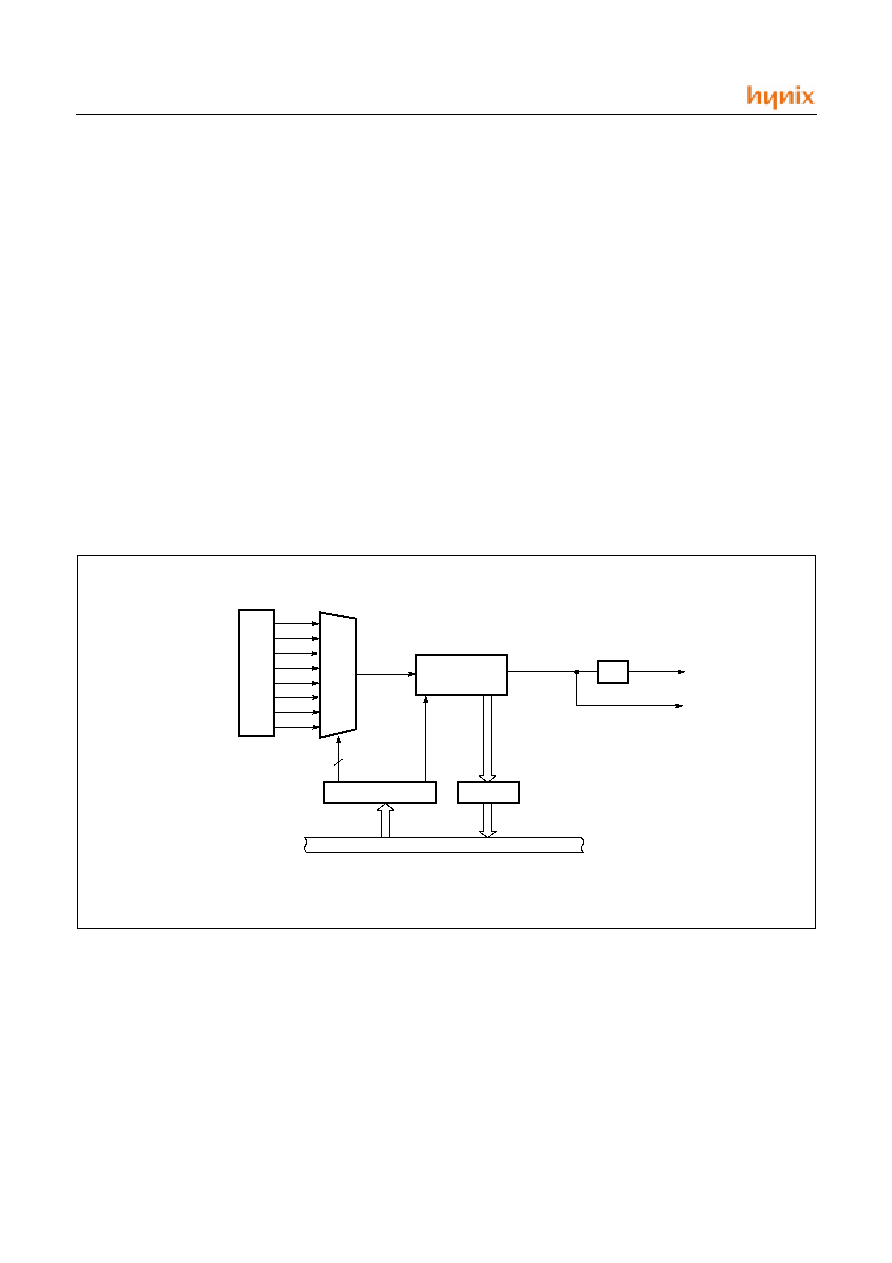
6. PORT STRUCTURES
R0[0:7]
R10, R13
R11/INT1, R12/INT2, R14/EC
Pin
Data Reg.
Dir. Reg.
Key Scan
Pull up
Reg.
Rd
V
DD
V
SS
Pull-up Tr.
Input
Open Drain
Reg.
Da
ta
B
u
s
Tr.: Transistor
Reg.: Register
LVD
Circuit
OTP : connected
MASK : option (default connected)
V
DD
KS_EN
Standby Release Level Control Register
MUX
MUX
Pin
Data Reg.
Function Sele-
Key Scan
Pull up
Reg.
Rd
V
DD
V
SS
Pull-up Tr.
Input
Open Drain
Reg.
Data
B
u
s
Tr.: Transistor
Reg.: Register
LVD
Circuit
OTP : connected
MASK : option (default connected)
V
DD
KS_EN
Standby Release Level Control Register
ction Reg.
D ir R eg.
MUX
MUX
Pin
Data Reg.
Function Sele-
Key Scan
Pull up
Reg.
Rd
V
DD
V
SS
Pull-up Tr.
Input
Open Drain
Reg.
Da
ta B
u
s
Tr.: Transistor
Reg.: Register
LVD
Circuit
OTP : connected
MASK : option (default connected)
V
DD
KS_EN
Standby Release Level Control Register
ction Reg.
D ir R eg.
MUX
Noise
Filter
to R11...INT1
to R12...INT2
to R14...EC
MUX

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
11
R15/T2, R16/T1, R17/T0
R2[0:4]
TEST
REMOUT
XIN, XOUT
RESET
Pin
Data Reg.
Function Sele-
Key Scan
Pull up
Reg.
Rd
V
DD
V
SS
Pull-up Tr.
Input
Open Drain
Reg.
Data
B
u
s
Tr.: Transistor
Reg.: Register
LVD
Circuit
OTP : connected
MASK : option (default connected)
V
DD
KS_EN
Standby Release Level Control Register
ction Reg.
D ir R eg.
MUX
to R15...T2
to R16...T1
to R17...T0
MUX
MUX
Pin
Data Reg.
Dir. Reg.
Pull up
Reg.
Rd
V
DD
V
SS
Pull-up Tr.
Open Drain
Reg.
Data
B
u
s
Tr.: Transistor
Reg.: Register
LVD
Circuit
OTP : connected
MASK : option (default connected)
V
DD
MUX
Pin
V
DD
V
SS
Noise
Filter
Pin
V
DD
V
SS
Internal Signal
XIN
V
SS
XOUT
Noise
Filter
from STOP circuit
Pin
V
DD
V
SS
Noise
Filter
from Power On Reset

HMS81004E/08E/16E/24E/32E
12
JUNE 2001 Ver 1.00
7. ELECTRICAL CHARACTERISTICS
7.1 Absolute Maximum Ratings
Supply voltage ........................................... -0.3 to +5.0 V
Input Voltage .....................................-0.3 to V
DD
+0.3 V
Output Voltage ...................................-0.3 to V
DD
+0.3 V
Operating Temperature........................................ 0~70
∞
C
Storage Temperature ...................................... -65~150
∞
C
Power Dissipation................................................700 mA
Note: Stresses above those listed under "Absolute Maxi-
mum Ratings" may cause permanent damage to the de-
vice. This is a stress rating only and functional operation of
the device at any other conditions above those indicated in
the operational sections of this specification is not implied.
Exposure to absolute maximum rating conditions for ex-
tended periods may affect device reliability.
7.2 Recommended Operating Conditions
7.3 DC Electrical Characteristics
(T
A
=-0~70
∞
C, V
DD
=2.0~3.6V, GND=0V)
Parameter
Symbol
Condition
Specifications
Unit
Min.
Max.
Supply Voltage
V
DD
f
XIN
=4MHz
2.0
3.6
V
Operating Frequency
f
XIN
V
DD
=2.0~3.6V
1.0
4.0
MHz
Operating Temperature
T
OPR
-
0
+70
∞
C
Parameter
Symbol
Condition
Specifications
Unit
Min.
Typ.
Max.
High level
input Voltage
V
IH1
R11,R12,R14,RESET
0.8 V
DD
-
V
DD
V
V
IH2
R0,R1(except R11,R12,R14), R2
0.7 V
DD
-
V
DD
V
Low level
input Voltage
V
IL1
R11,R12,R14,RESET
0
-
0.2 V
DD
V
V
IL2
R0,R1(except R11,R12,R14), R2
0
-
0.3 V
DD
V
Hign level input
Leakage Current
I
IH
R0,R1,R2,RESET ,V
IH
= VDD
-
-
1
µ
A
Low level input
Leakage Current
I
IL
R0,R1,R2,RESET (without pull-up),V
IL
= 0
-
-
-1
µ
A
High level
output Voltage
V
OH1
R0, I
OH
=-0.5mA
VDD-0.4
-
-
V
V
OH2
R1[6:0], R2, I
OH
=-1.0mA
VDD-0.4
-
-
V
V
OH3
XIN, XOUT,I
OH
=-200
µ
A
VDD-0.9
-
-
V
Low level
output Voltage
V
OL1
R0, I
OL
=1mA
-
-
0.4
V
V
OL2
R1, R2, I
OL
=5mA
-
-
0.8
V
V
OL3
XIN, XOUT,I
OL
=200
µ
A
-
-
0.8
V
Hign level output
Leakage Current
I
OHL
R0,R1,R2, V
OH
= VDD
-
-
1
µ
A
Low level output
Leakage Current
I
OLL
R0,R1,R2, V
OL
= 0
-
-
-1
µ
A
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
13
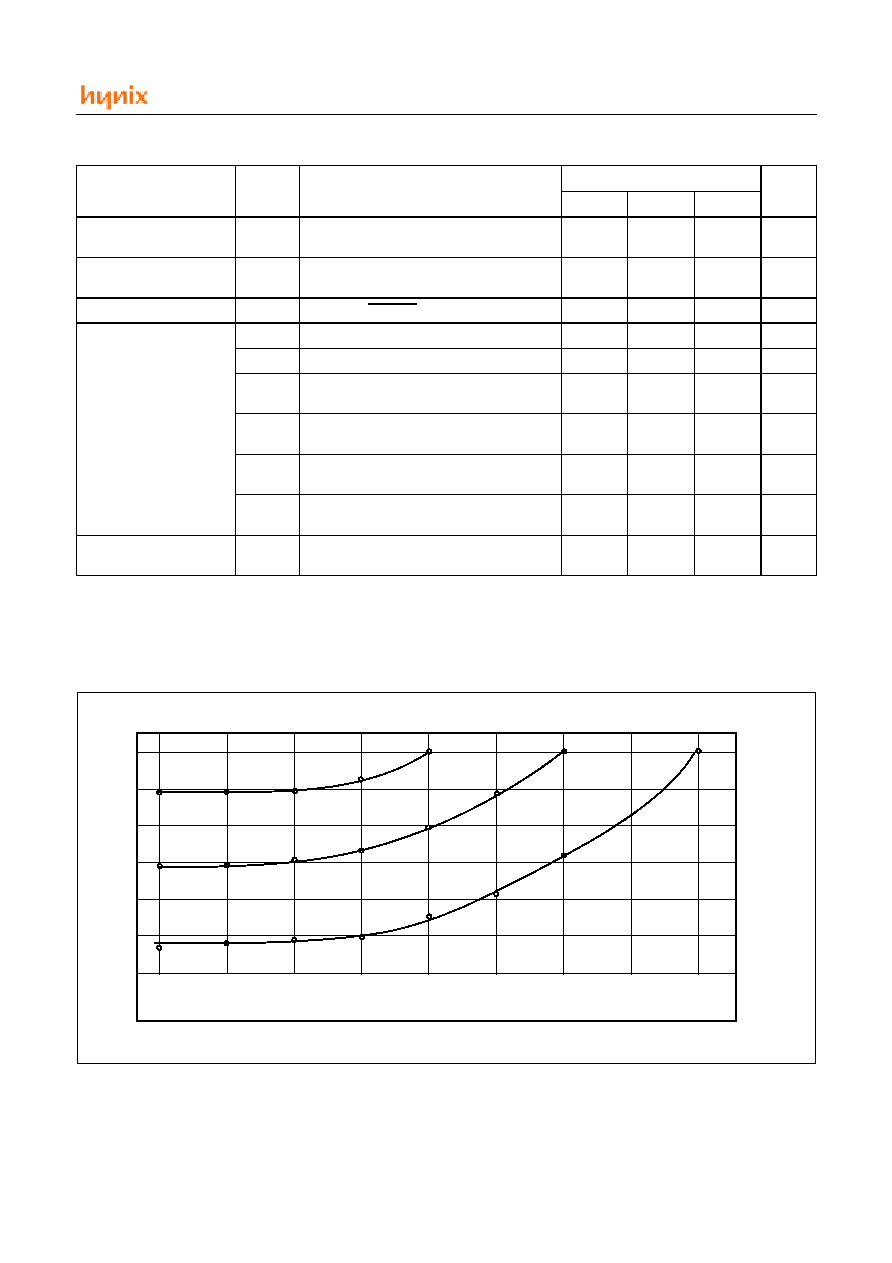
7.4 REMOUT Port Ioh Characteristics Graph
(typical process & room temperature)
High Level
output current
I
OH
REMOUT, R17, V
OH
=2V
-30
-12
-5
mA
Low Level
output cruuent
I
OL
REMOUT, V
OL
=1V
0.5
-
3
mA
Input pull-up current
I
p
R0,R1,R2, RESET, VDD=3V
15
30
60
µ
A
Power Supply Current
I
DD1
Operating current ,fxin=4Mhz, VDD=2.0V
-
2.4
6
mA
I
DD2
Operating current ,fxin=4Mhz, VDD=3.6V
-
4
10
mA
I
SLP1
Sleep mode current ,fxin=4Mhz,
VDD=2.0V
-
1
2
mA
I
SLP2
Sleep mode current ,fxin=4Mhz,
VDD=3.6V
-
2
3
mA
I
STP1
Stop mode current ,Oscillator Stop
VDD=2.0V
-
2
8
µ
A
I
STP2
Stop mode current ,Oscillator Stop
VDD=3.6V
-
3
10
µ
A
RAM retention
supply voltage
V
RET
-
0.7
-
-
V
Parameter
Symbol
Condition
Specifications
Unit
Min.
Typ.
Max.
.
Figure 7-1 Ioh vs Voh
0
Ioh(mA)
Voh (
V)
0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
-5
-10
-15
-20
-25
-30
Vdd 2V
Vdd 3V
Vdd 4V

HMS81004E/08E/16E/24E/32E
14
JUNE 2001 Ver 1.00
7.5 REMOUT Port Iol Characteristics Graph
(typical process & room temperature)
7.6 AC Characteristics
(T
A
=0~+70
∞
∞
∞
∞
C, V
DD
=2.0~3.6V
,
V
SS
=0V)
.
Figure 7-2 Iol vs Vol
5
Iol(mA)
Vol (
V)
0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
4
3
2
1
0
-1
Vdd 3V
Vdd 4V
Vdd 2V
Parameter
Symbol
Pins
Specifications
Unit
Min.
Typ.
Max.
External clock input cycle time
t
CP
X
IN
250
500
1000
ns
System clock cycle time
t
SYS
500
1000
2000
ns
External clock pulse width High
t
CPH
X
IN
40
-
-
ns
External clock pulse width Low
t
CPL
X
IN
40
-
-
ns
External clock rising time
t
RCP
X
IN
-
-
40
ns
External clock falling time
t
FCP
X
IN
-
-
40
nS
Interrupt pulse width High
t
IH
INT1, INT2
2
-
-
t
SYS
Interrupt pulse width Low
t
IL
INT1, INT2
2
-
-
t
SYS
RESET Input pulse width low
t
RSTL
RESET
8
-
-
t
SYS
Event counter input pulse width high
t
ECH
EC
2
-
-
t
SYS
Event counter input pulse width low
t
ECL
EC
2
-
-
t
SYS
Event counter input pulse rising time
t
REC
EC
-
-
40
ns
Event counter input pulse falling time
t
FEC
EC
-
-
40
ns

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
15
Figure 7-3 Timing Diagram
t
RCP
t
FCP
X
IN
INT1
INT2
0.5V
V
DD
-0.5V
0.2V
DD
0.8V
DD
0.2V
DD
RESET
0.2V
DD
0.8V
DD
EC
t
IL
t
IH
t
RSTL
t
ECL
t
ECH
t
CP
t
CPH
t
CPL

HMS81004E/08E/16E/24E/32E
16
JUNE 2001 Ver 1.00
8. MEMORY ORGANIZATION
The HMS81004E/08E/16E/24E/32E has separate address
spaces for Program memory and Data Memory. Program
memory can only be read, not written to. It can be up to
32K bytes of Program memory. Data memory can be read
and written to up to 448 bytes including the stack area.
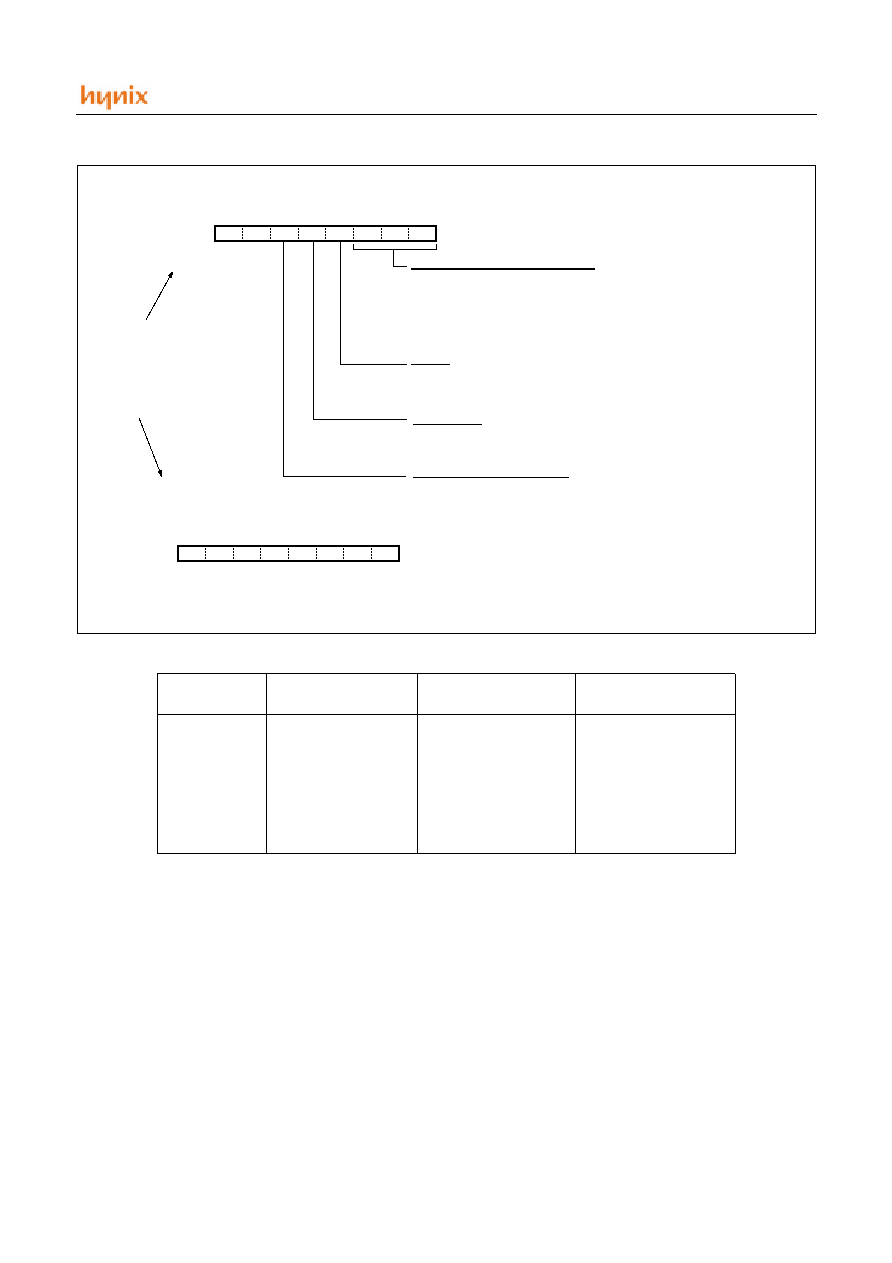
8.1 Registers
This device has six registers that are the Program Counter
(PC), an Accumulator (A), two index registers (X, Y), the
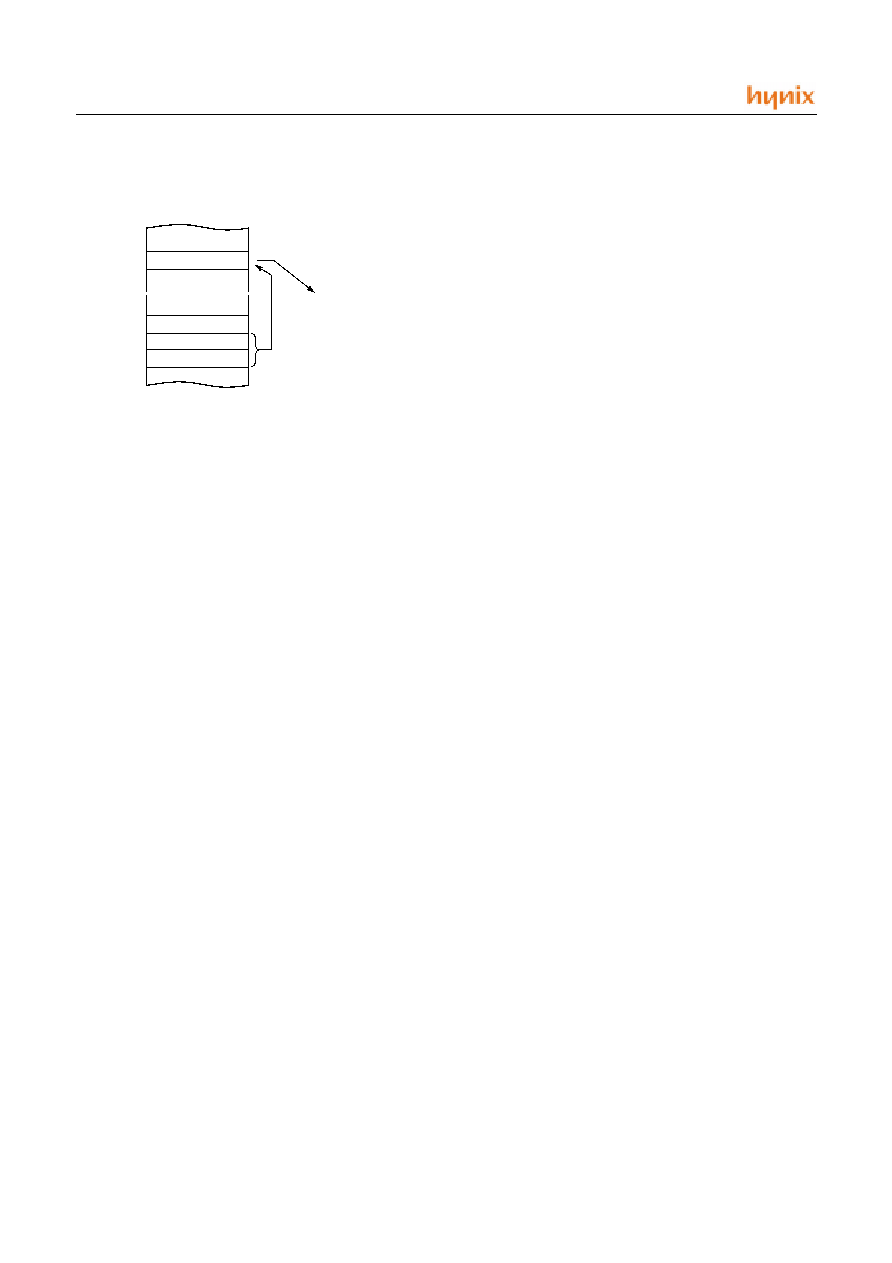
Stack Pointer (SP), and the Program Status Word (PSW).
The Program Counter consists of 16-bit register.
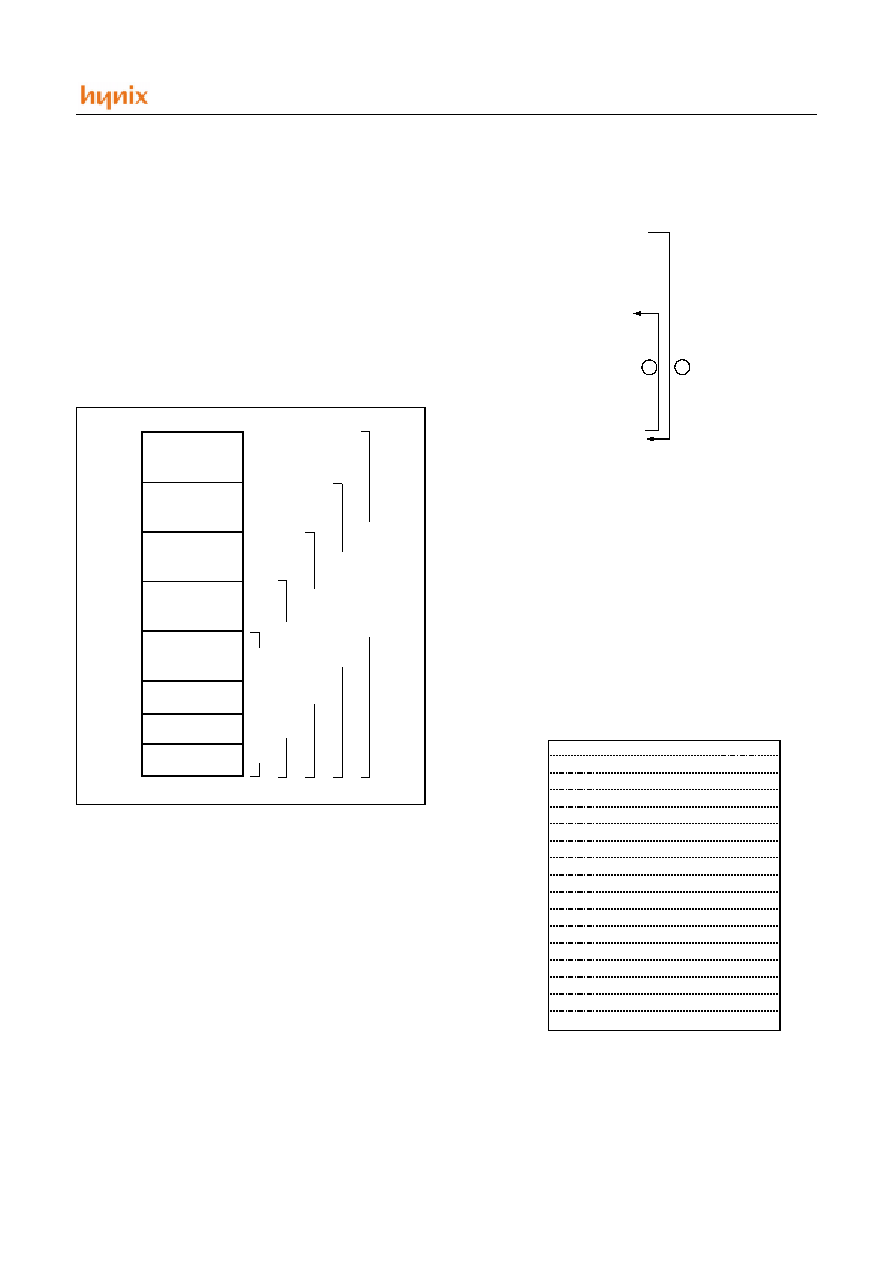
Figure 8-1 Configuration of Registers
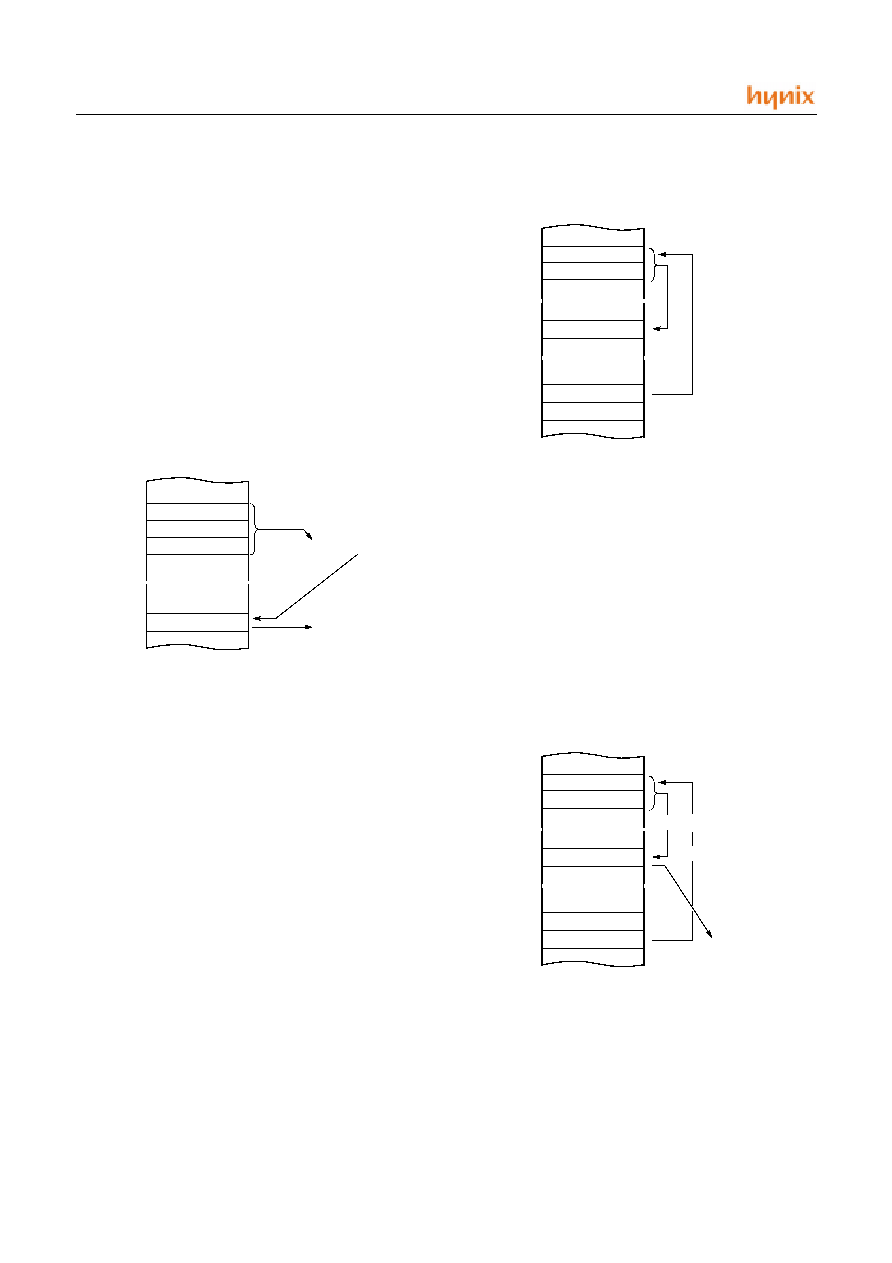
Accumulator:
The Accumulator is the 8-bit general purpose register, used
for data operation such as transfer, temporary saving, and
conditional judgement, etc. The Accumulator can be used
as a 16-bit register with Y Register as shown below.
In the case of multiplication instruction, execute as a mul-
tiplier register. After multiplication operation, the lower 8-
bit of the result enters. (Y*A => YA). In the case of divi-
sion instruction, execute as the lower 8-bit of dividend. Af-
ter division operation, quotient enters.
Figure 8-2 Configuration of YA 16-bit Register
X, Y Registers:
In the addressing mode which uses these index registers,
the register contents are added to the specified address,
which becomes the actual address. These modes are ex-
tremely effective for referencing subroutine tables and
memory tables. The index registers also have increment,
decrement, comparison and data transfer functions, and
they can be used as simple accumulators.
∑ X Register
In the case of division instruction, execute as register.
∑ Y Register
In the case of 16-bit operation instruction, execute as the
upper 8-bit of YA. (16-bit accumulator). In the case of
multiplication instruction, execute as a multiplicand regis-
ter. After multiplication operation, the upper 8-bit of the
result enters. In the case of division instruction, execute as
the upper 8-bit of dividend. After division operation, re-
mains enters. Y register can be used as loop counter of
conditional branch command. (e.g.DBNE Y, rel)
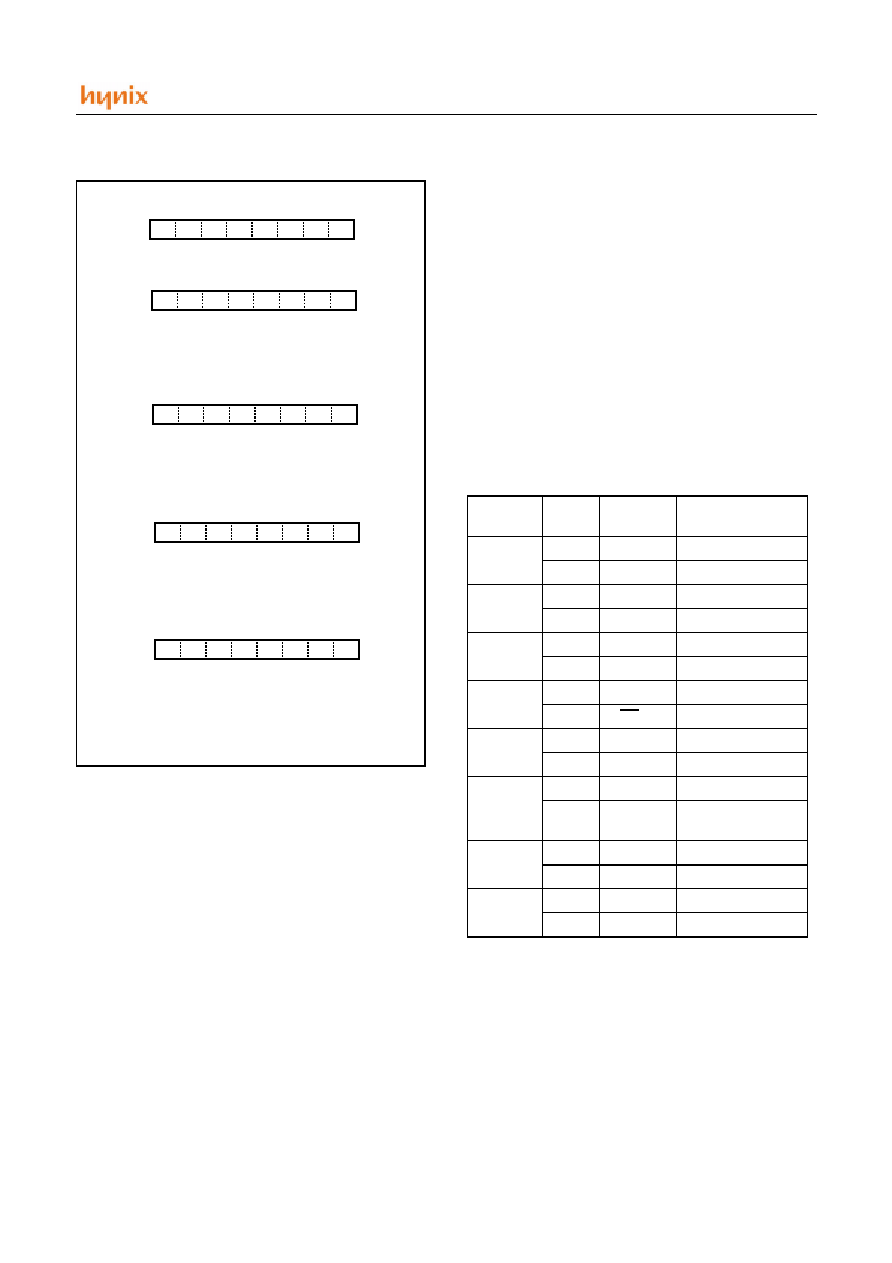
Stack Pointer:
The Stack Pointer is an 8-bit register used for occurrence
interrupts, calling out subroutines and PUSH, POP, RETI,
RET instruction. Stack Pointer identifies the location in the
stack to be accessed (save or restore).
Generally, SP is automatically updated when a subroutine
call is executed or an interrupt is accepted. However, if it
is used in excess of the stack area permitted by the data
memory allocating configuration, the user-processed data
may be lost. The SP is post-decremented when a subrou-
tine call or a push instruction is executed, or when an inter-
rupt is accepted. The SP is pre-incremented when a return
or a pop instruction is executed.
The stack can be located at any position within 100
H
to
1FF
H
of the internal data memory. The SP is not initialized
by hardware, requiring to write the initial value (the loca-
tion with which the use of the stack starts) by using the ini-
tialization routine. Normally, the initial value of "FF
H
" is
A
ACCUMULATOR
X REGISTER
Y REGISTER
STACK POINTER
PROGRAM COUNTER
PROGRAM STATUS
WORD
X
Y
SP
PCL
PCH
PSW
Two 8-bit Registers can be used as a "YA" 16-bit Register
Y
A
Y
A
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
17
used.
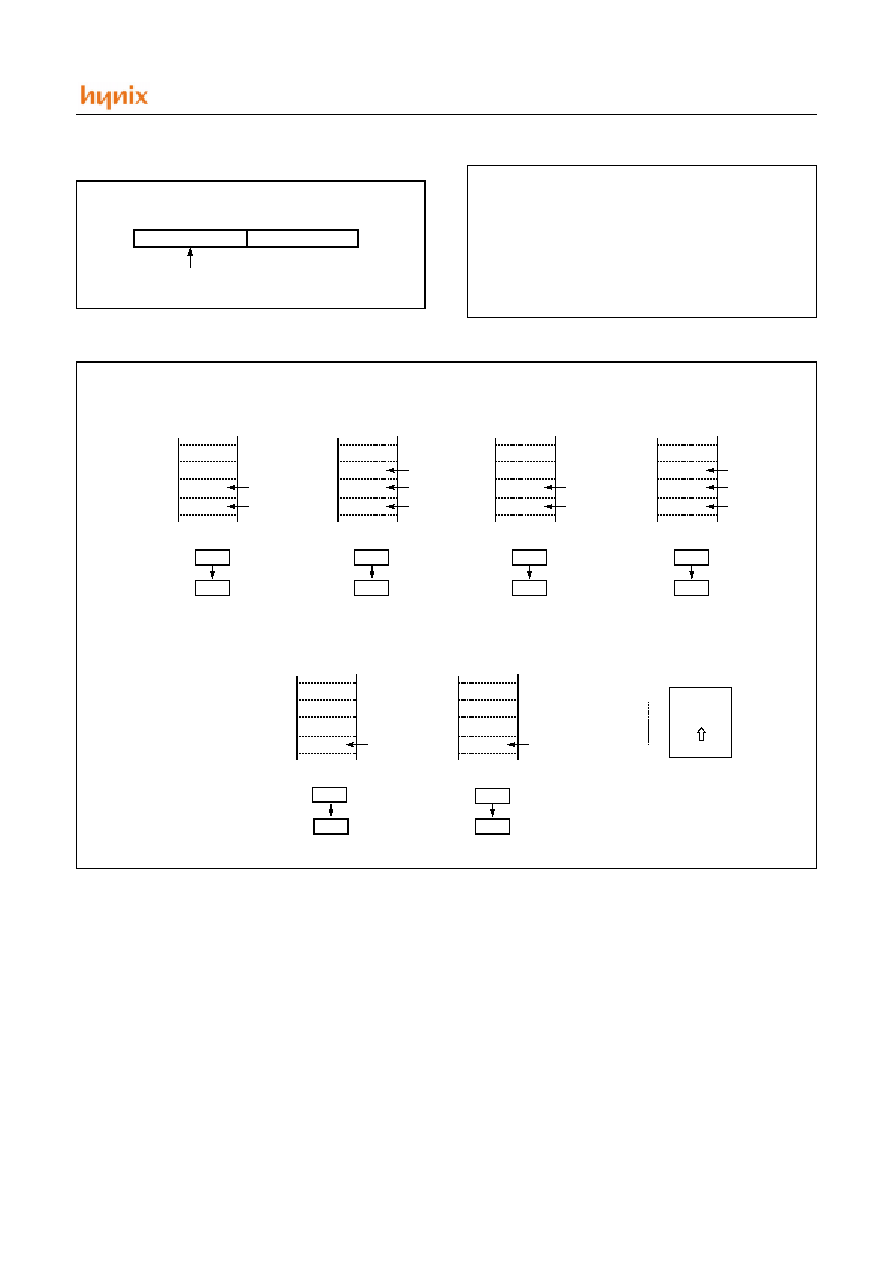
Figure 8-3 Stack Operation
Program Counter:
The Program Counter is a 16-bit wide which consists of
two 8-bit registers, PCH and PCL. This counter indicates
the address of the next instruction to be executed. In reset
state, the program counter has reset routine address
(PC
H
:0FF
H
, PC
L
:0FE
H
).
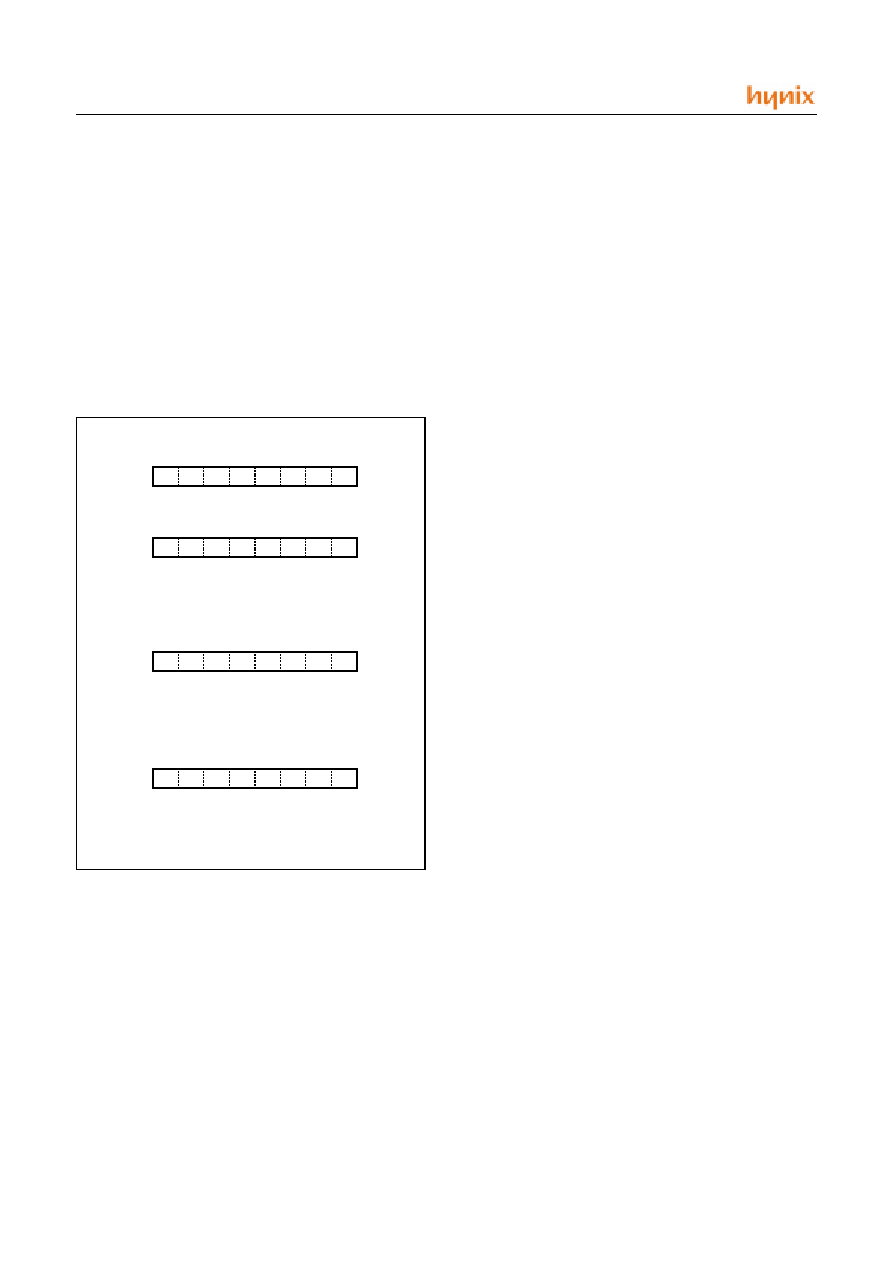
Program Status Word:
The Program Status Word (PSW) contains several bits that
reflect the current state of the CPU. The PSW is described
in Figure 8-4 . It contains the Negative flag, the Overflow
flag, the Break flag the Half Carry (for BCD operation),
the Interrupt enable flag, the Zero flag, and the Carry flag.
[Carry flag C]
This flag stores any carry or borrow from the ALU of CPU
after an arithmetic operation and is also changed by the
Shift Instruction or Rotate Instruction.
SP
01
H
Stack Address ( 100
H
~ 1FF
H
)
15
0
8
7
Hardware fixed
Caution:
The Stack Pointer must be initialized by software be-
cause its value is undefined after RESET.
Example: To initialize the SP
LDX
#0FFH
TXSP
; SP
FF
H
At execution of
a CALL/TCALL/PCALL
PCL
PCH
01FF
SP after
execution
SP before
execution
01FD
01FE
01FD
01FC
01FF
Push
down
At acceptance
of interrupt
PCL
PCH
01FF
01FC
01FE
01FD
01FC
01FF
Push
down
PSW
At execution
of RET instruction
PCL
PCH
01FF
01FF
01FE
01FD
01FC
01FD
Pop
up
At execution
of RETI instruction
PCL
PCH
01FF
01FF
01FE
01FD
01FC
01FC
Pop
up
PSW
0100H
01FFH
Stack
depth
At execution
of PUSH instruction
A
01FF
01FE
01FE
01FD
01FC
01FF
Push
down
SP after
execution
SP before
execution
PUSH A (X,Y,PSW)
At execution
of POP instruction
A
01FF
01FF
01FE
01FD
01FC
01FE
Pop
up
POP A (X,Y,PSW)
HMS81004E/08E/16E/24E/32E
18
JUNE 2001 Ver 1.00
[Zero flag Z]
This flag is set when the result of an arithmetic operation
or data transfer is "0" and is cleared by any other result.
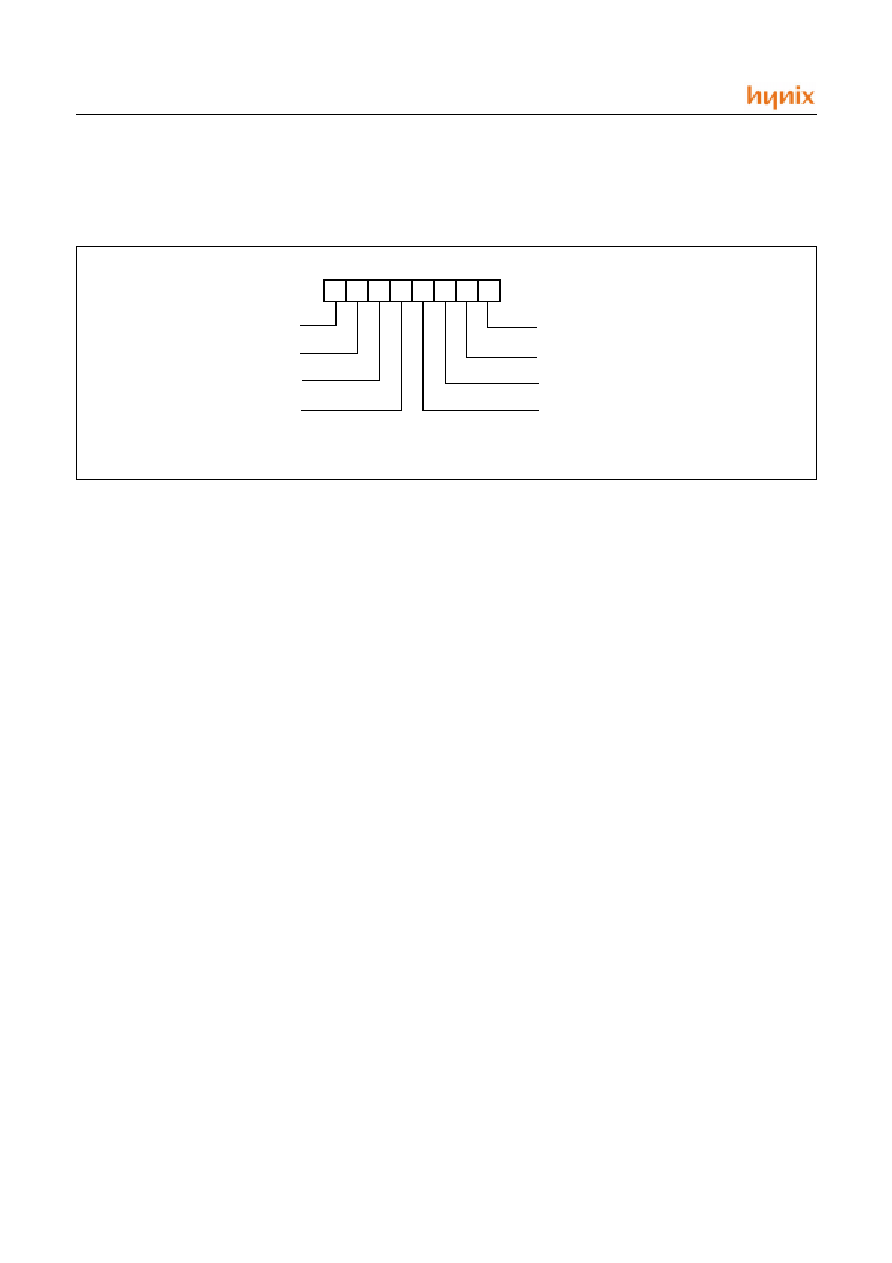
Figure 8-4 PSW (Program Status Word) Register
[Interrupt disable flag I]
This flag enables/disables all interrupts except interrupt
caused by Reset or software BRK instruction. All inter-
rupts are disabled when cleared to "0". This flag immedi-
ately becomes "0" when an interrupt is served. It is set by
the EI instruction and cleared by the DI instruction.
[Half carry flag H]
After operation, this is set when there is a carry from bit 3
of ALU or there is no borrow from bit 4 of ALU. This bit
can not be set or cleared except CLRV instruction with
Overflow flag (V).
[Break flag B]
This flag is set by software BRK instruction to distinguish
BRK from TCALL instruction with the same vector ad-
dress.
[Direct page flag G]
This flag assigns RAM page for direct addressing mode. In
the direct addressing mode, addressing area is from zero
page 00
H
to 0FF
H
when this flag is "0". If it is set to "1",
addressing area is 1 Page. It is set by SETG instruction and
cleared by CLRG.
[Overflow flag V]
This flag is set to "1" when an overflow occurs as the result
of an arithmetic operation involving signs. An overflow
occurs when the result of an addition or subtraction ex-
ceeds +127(7F
H
) or -128(80
H
). The CLRV instruction
clears the overflow flag. There is no set instruction. When
the BIT instruction is executed, bit 6 of memory is copied
to this flag.
[Negative flag N]
This flag is set to match the sign bit (bit 7) status of the re-
sult of a data or arithmetic operation. When the BIT in-
struction is executed, bit 7 of memory is copied to this flag.
N
NEGATIVE FLAG
V
G
B
H
I
Z
C
MSB
LSB
RESET VALUE : 00
H
PSW
OVERFLOW FLAG
BRK FLAG
CARRY FLAG RECEIVES
ZERO FLAG
INTERRUPT ENABLE FLAG
CARRY OUT
HALF CARRY FLAG RECEIVES
CARRY OUT FROM BIT 1 OF
ADDITION OPERLANDS
SELECT DIRECT PAGE
when g=1, page is addressed by RPR
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
19
8.2 Program Memory
A 16-bit program counter is capable of addressing up to
64K bytes, but this device has 4/8/16/24/32K bytes pro-
gram memory space only physically implemented. Ac-
cessing a location above FFFF
H
will cause a wrap-around
to 0000
H
.
Figure 8-5 , shows a map of Program Memory. After reset,
the CPU begins execution from reset vector which is stored
in address FFFE
H
and FFFF
H
as shown in Figure 8-6 .
As shown in Figure 8-5 , each area is assigned a fixed lo-
cation in Program Memory. Program Memory area con-
tains the user program.
Figure 8-5 Program Memory Map
Page Call (PCALL) area contains subroutine program to
reduce program byte length by using 2 bytes PCALL in-
stead of 3 bytes CALL instruction. If it is frequently
called, it is more useful to save program byte length.
Table Call (TCALL) causes the CPU to jump to each
TCALL address, where it commences the execution of the
service routine. The Table Call service area spaces 2-byte
for every TCALL: 0FFC0
H
for TCALL15, 0FFC2
H
for
TCALL14, etc., as shown in Figure 8-7 .
Example: Usage of TCALL
The interrupt causes the CPU to jump to specific location,
where it commences the execution of the service routine.
The External interrupt 0, for example, is assigned to loca-
tion 0FFFA
H
. The interrupt service locations spaces 2-byte
interval: 0FFF8
H
and 0FFF9
H
for External Interrupt 1,
0FFFA
H
and 0FFFB
H
for External Interrupt 0, etc.
Any area from 0FF00
H
to 0FFFF
H
, if it is not going to be
used, its service location is available as general purpose
Program Memory.
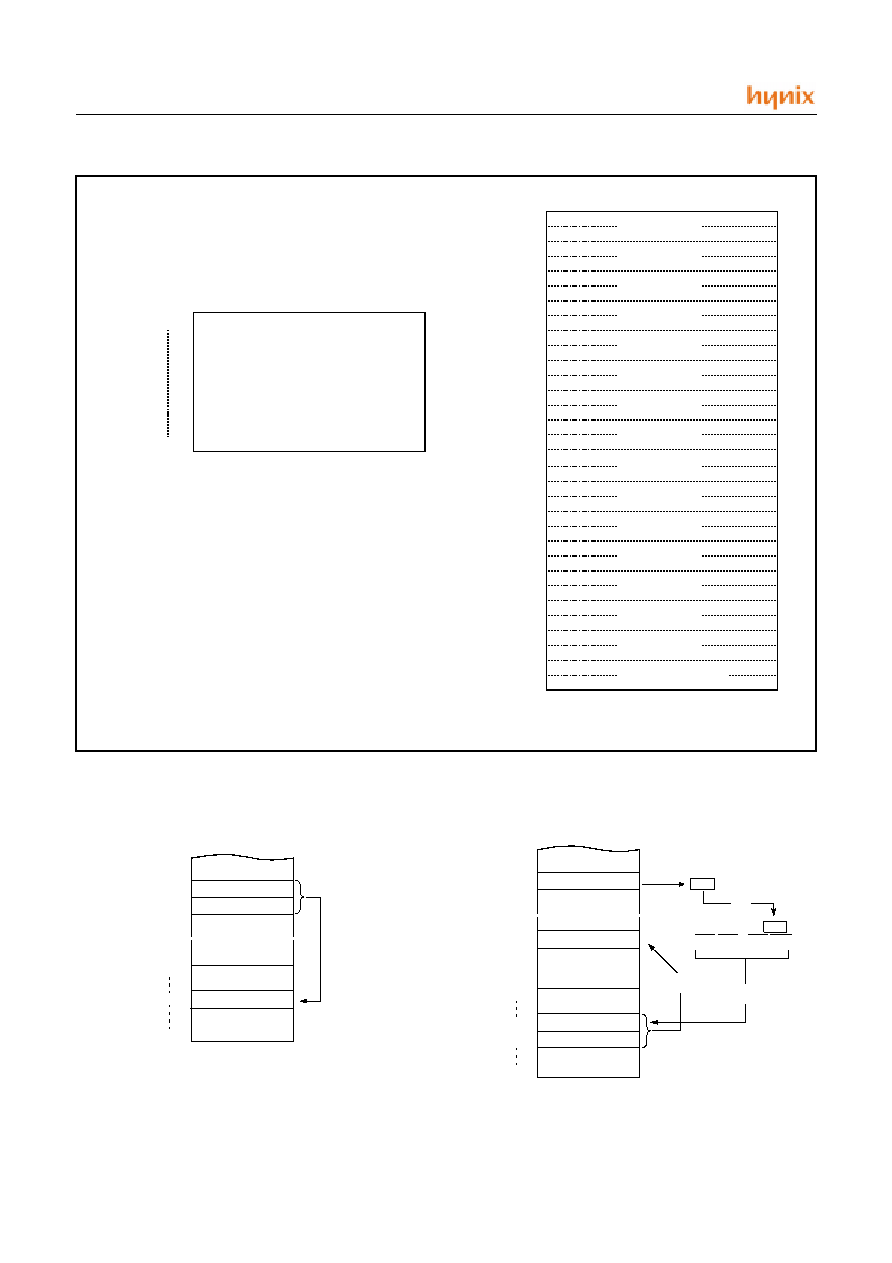
Figure 8-6 Interrupt Vector Area
TCALL
AREA
INTERRUPT
VECTOR AREA
FF00
H
FFC0
H
FFE0
H
FFFF
H
PCALL
AREA
A000
H
8000
H
F000
H
E000
H
C000
H
H
M
S
8
10
04E
4
KROM
H
M
S
8
100
8E
8K
R
O
M
H
M
S
8
1
016
E
16
KR
O
M
H
M
S
8
102
4E
2
4
KROM
H
M
S
810
32
E
3
2
KRO
M
LDA
#5
TCALL
0FH
;
1BYTE INSTR UCTIO N
:
;
INSTEAD O F 2 BYTES
:
;
NO R M AL C ALL
;
;TABLE CALL ROUTINE
;
FUNC_A:
LDA
LRG0
RET
;
FUNC_B:
LDA
LRG1
RET
;
;TABLE CALL ADD. AREA
;
ORG
0FFC0H
;
TCALL ADDRESS AREA
DW
FUNC_A
DW
FUNC_B
1
2
E0
E2
Address
Vector Area Memory
E4
E6
E8
EA
EC
EE
F0
F2
F4
F6
F8
FA
FC
FE
-
-
-
Basic Interval Timer Interrupt Vector Area
-
-
Timer2 Interrupt Vector Area
Timer0 Interrupt Vector Area
-
External Interrupt 2 Vector Area
Key Scan Interrupt Vector Area
RESET Vector Area
External Interrupt 1 Vector Area
Timer1 Interrupt Vector Area
Watch Dog Timer Interrupt Vector Area
"-" means reserved area.
NOTE:
-
0FFDE
H
S/W Interrupt Vector Area
HMS81004E/08E/16E/24E/32E
20
JUNE 2001 Ver 1.00
Figure 8-7 PCALL and TCALL Memory Area
PCALL
rel
4F35
PCALL 35H
TCALL
n
4A
TCALL
4
0FFC0
H
C1
Address
Program Memory
C2
C3
C4
C5
C6
C7
C8
0FF00
H
Address
PCALL Area Memory
0FFBF
H
PCALL Area
(192 Bytes)
* means that the BRK software interrupt is using
same address with TCALL0.
NOTE:
TCALL 15
TCALL 14
TCALL 13
TCALL 12
TCALL 11
TCALL 10
TCALL 9
TCALL 8
TCALL 7
TCALL 6
TCALL 5
TCALL 4
TCALL 3
TCALL 2
TCALL 1
TCALL 0 / BRK *
C9
CA
CB
CC
CD
CE
CF
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
DA
DB
DC
DD
DE
DF
4F
~
~
~
~
NEXT
35
0FF35H
0FF00H
0FFFFH
11111111 11010110
01001010
PC:
F
H
F
H
D
H
6
H
4A
~
~
~
~
25
0FFD6H
0FF00H
0FFFFH
D1
NEXT
0FFD7H
0D125H
Reverse

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
21
Example: The usage software example of Vector address and the initialize part.
ORG
0FFE0H
DW
NOT_USED
DW
NOT_USED
DW
NOT_USED
DW
BIT_INT
; BIT
DW
WDT_INT
; Watch Dog Timer
DW
NOT_USED
DW
NOT_USED
DW
TMR2_INT
; Timer-2
DW
TMR1_INT
; Timer-1
DW
TMR0_INT
; Timer-0
DW
NOT_USED
;
DW
INT2
; Int.2
DW
INT1
; Int.1
DW
KEY_INT
; Key Scan
DW
NOT_USED
;
DW
RESET
; Reset
ORG
08000H
;HMS81032E Program start address
;********************************************
;
MAIN PROGRAM
*
;********************************************
;
RESET:
NOP
CLRG
DI
;Disable All Interrupts
LDX
#0
RAM_CLR:
LDA
#0
;RAM Clear(!0000H->!00BFH)
STA
{X}+
CMPX
#0C0H
BNE
RAM_CLR
;
LDX
#0FFH
;Stack Pointer Initialize
TXSP
LDM
R0, #0
;Normal Port 0
LDM
R0DD,#1000_0010B
;Normal Port Direction
LDM
P0PC,#1000_0010B
;Pull Up Selection Set
LDM
PMR1,#0000_0010B
;R1 port / int
:
:
LDM
CKCTLR,#0011_1101B
;WDT ON , 16mS Time delay after stop mode release
:
:
HMS81004E/08E/16E/24E/32E
22
JUNE 2001 Ver 1.00
8.3 Data Memory
Figure 8-8 shows the internal Data Memory space availa-
ble. Data Memory is divided into 3 groups, a user RAM,
control registers, Stack.
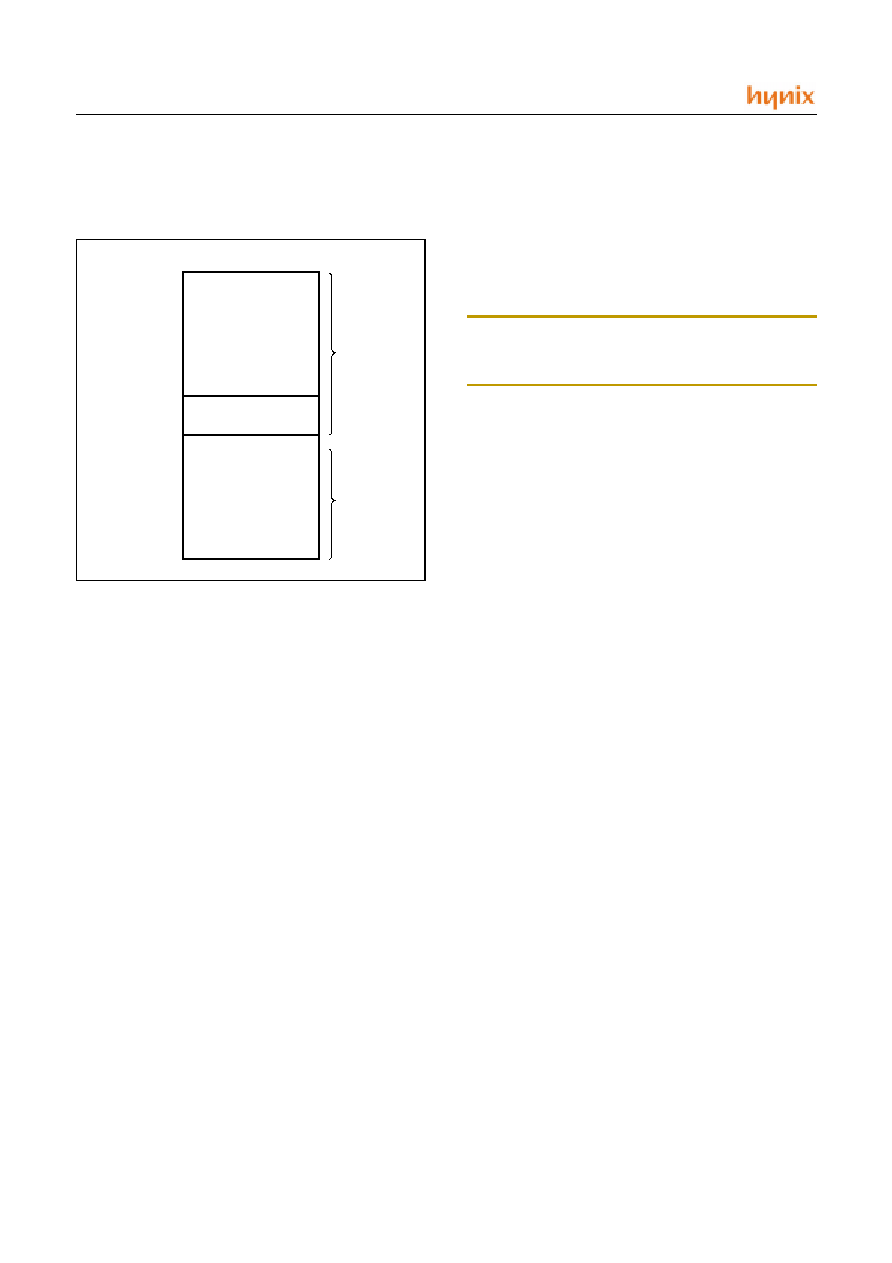
Figure 8-8 Data Memory Map
User Memory
The HMS81004E/08E/16E/24E/32E has 448
◊
8 bits for
the user memory (RAM).
Control Registers
The control registers are used by the CPU and Peripheral
function blocks for controlling the desired operation of the
device. Therefore these registers contain control and status
bits for the interrupt system, the timer/ counters, analog to
digital converters and I/O ports. The control registers are in
address range of 0C0
H
to 0FF
H
.
Note that unoccupied addresses may not be implemented
on the chip. Read accesses to these addresses will in gen-
eral return random data, and write accesses will have an in-
determinate effect.
More detailed informations of each register are explained
in each peripheral section.
Note: Write only registers can not be accessed by bit ma-
nipulation instruction. Do not use read-modify-write instruc-
tion. Use byte manipulation instruction.
Example; To write at CKCTLR
LDM
CLCTLR,#09H ;Divide ratio
˜16
Stack Area
The stack provides the area where the return address is
saved before a jump is performed during the processing
routine at the execution of a subroutine call instruction or
the acceptance of an interrupt.
When returning from the processing routine, executing the
subroutine return instruction [RET] restores the contents of
the program counter from the stack; executing the interrupt
return instruction [RETI] restores the contents of the pro-
gram counter and flags.
The save/restore locations in the stack are determined by
the stack pointed (SP). The SP is automatically decreased
after the saving, and increased before the restoring. This
means the value of the SP indicates the stack location
number for the next save. Refer to Figure 8-3 on page 17.
RAM
(192 Bytes)
CONTROL
REGISTERS
0000H
00BFH
00C0H
00FFH
0100H
01FFH
PAGE0
PAGE1
RAM (STACK)
(256 Bytes)

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
23
8.4
List for Control Registers
Address
Function Register
Symbol
Read
Write
RESET Value
00C0h
PORT R0 DATA REG.
R0
R/W
undefined
00C1h
PORT R0 DATA DIRECTION REG.
R0DD
W
00000000b
00C2h
PORT R1 DATA REG.
R1
R/W
undefined
00C3h
PORT R1 DATA DIRECTION REG.
R1DD
W
00000000b
00C4h
PORT R2 DATA REG.
R2
R/W
undefined
00C5h
PORT R2 DATA DIRECTION REG.
R2DD
W
00000000b
00C6h
reserved
00C7h
CLOCK CONTROL REG.
CKCTLR
W
--110111b
BASIC INTERVAL REG.
BTR
R
undefined
00C8h
WATCH DOG TIMER REG.
WDTR
W
-0001111b
00C9h
PORT R1 MODE REG.
PMR1
W
00000000b
00CAh
INT. MODE REG.
IMOD
R/W
-0000000b
00CBh
EXT. INT. EDGE SELECTION
IEDS
W
00000000b
00CCh
INT. ENABLE REG. LOW
IENL
R/W
-00-----b
00CDh
INT. REQUEST FLAG REG. LOW
IRQL
R/W
-00-----b
00CEh
INT. ENABLE REG. HIGH
IENH
R/W
000-000-b
00CFh
INT. REQUEST FLAG REG. HIGH
IRQH
R/W
000-000-b
00D0h
TIMER0 (16bit) MODE REG.
TM0
R/W
00000000b
00D1h
TIMER1 (8bit) MODE REG.
TM1
R/W
00000000b
00D2h
TIMER2 (8bit) MODE REG.
TM2
R/W
00000000b
00D3h
TIMER0 HIGH-MSB DATA REG.
T0HMD
W
undefined
00D4h
TIMER0 HIGH-LSB DATA REG.
T0HLD
W
undefined
00D5h
TIMER0 LOW-MSB DATA REG.
T0LMD
W
undefined
TIMER0 HIGH-MSB COUNT REG.
R
undefined
00D6h
TIMER0 LOW-LSB DATA REG.
T0LLD
W
undefined
TIMER0 LOW-LSB COUNT REG.
W
undefined
00D7h
TIMER1 HIGH DATA REG.
T1HD
W
undefined
00D8h
TIMER1 LOW DATA REG.
T1LD
W
undefined
TIMER1 LOW COUNT REG.
R
undefined
00D9h
TIMER2 DATA REG.
T2DR
W
undefined
TIMER2 COUNT REG.
R
undefined
00DAh
TIMER0 / TIMER1 MODE REG.
TM01
R/W
00000000b
00DBh
Reserved
00DCh
STANDBY MODE RELEASE REG0
SMPR0
R/W
00000000b
00DDh
STANDBY MODE RELEASE REG0
SMPR1
R/W
00000000b
00DEh
PORT R1 OPEN DRAIN ASSIGN REG.
R1ODC
R/W
00000000b

HMS81004E/08E/16E/24E/32E
24
JUNE 2001 Ver 1.00
00DFh
PORT R2 OPEN DRAIN ASSIGN REG.
R2ODC
R/W
00000000b
00E0h
Reserved
00E1h
Reserved
00E2h
Reserved
00E3h
Reserved
00E4h
PORT R0 OPEN DRAIN ASSIGN REG.
R0ODC
R/W
00000000b
00E5h
Reserved
00E6h
Reserved
00E7h
Reserved
00E8h
Reserved
00E9h
Reserved
00EAh
Reserved
00EBh
Reserved
00ECh
Reserved
00EDh
Reserved
00EEh
Reserved
00EFh
Reserved
00F0h
SLEEP MODE REG.
SLPM
W
- - - - - - - 0b
00F1h
Reserved
00F2
Reserved
00F3h
Reserved
00F4h
Reserved
00F5h
Reserved
00F6h
STANDBY RELEASE LEVEL CONT. REG. 0
SRLC0
W
00000000b
00F7h
STANDBY RELEASE LEVEL CONT. REG. 1
SRLC1
W
00000000b
00F8h
PORT R0 PULL-UP REG. CONT. REG.
R0PC
W
00000000b
00F9h
PORT R1 PULL-UP REG. CONT. REG.
R1PC
W
00000000b
00FAh
PORT R2 PULL-UP REG. CONT. REG.
R2PC
W
00000000b
00FBh
Reserved
00FCh
Reserved
00FDh
Reserved
00FEh
Reserved
00FFh
Reserved
Registers are controlled by byte manipulation instruction such as LDM etc., do not use bit manipulation
W
Registers are controlled by both bit and byte manipulation instruction.
R/W
instruction such as SET1, CLR1 etc. If bit manipulation instruction is used on these registers,
content of other seven bits are may varied to unwanted value.
- : this bit location is reserved.

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
25
8.5 Addressing Mode
The HMS81004E/08E/16E/24E/32E uses six addressing
modes;
∑ Register addressing
∑ Immediate addressing
∑ Direct page addressing
∑ Absolute addressing
∑ Indexed addressing
∑ Register-indirect addressing
(1) Register Addressing
Register addressing accesses the A, X, Y, C and PSW.
(2) Immediate Addressing
#imm
In this mode, second byte (operand) is accessed as a data
immediately.
Example:
0435
ADC
#35H
When G-flag is 1, then RAM address is difined by 16-bit
address which is composed of 8-bit RAM paging register
(RPR) and 8-bit immediate data.
Example: G=1, RPR=0CH
E45535
LDM
35H,#55H
(3) Direct Page Addressing
dp
In this mode, a address is specified within direct page.
Example; G=0
C535
LDA
35H
;A
RAM[35H]
(4) Absolute Addressing
!abs
Absolute addressing sets corresponding memory data to
Data , i.e. second byte(Operand I) of command becomes
lower level address and third byte (Operand II) becomes
upper level address.
With 3 bytes command, it is possible to access to whole
memory area.
ADC, AND, CMP, CMPX, CMPY, EOR, LDA, LDX,
LDY, OR, SBC, STA, STX, STY
Example;
35
A+35H+C
A
04
MEMORY
E4
0F100
H
data
55H
~
~
~
~
data
0C35
H
35
0F102
H
55
0F101
H
data
35
35
H
0E551
H
data
A
~
~
~
~
C5
0E550
H
HMS81004E/08E/16E/24E/32E
26
JUNE 2001 Ver 1.00
0735F0
ADC
!0F035H
;A
ROM[0F035H]
07
0F100
H
~
~
~
~
data
0F035
H
F0
0F102
H
35
0F101
H
A+data+C
A
address: 0F035

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
27
The operation within data memory (RAM)
ASL, BIT, DEC, INC, LSR, ROL, ROR
Example; Addressing accesses the address 0135
H
regard-
less of G-flag and RPR.
983501
INC
!0135H
;A
ROM[135H]
(5) Indexed Addressing
X indexed direct page (no offset)
{X}
In this mode, a address is specified by the X register.
ADC, AND, CMP, EOR, LDA, OR, SBC, STA, XMA
Example; X=15
H
, G=1, RPR=01
H
D4
LDA
{X}
;ACC
RAM[X].
X indexed direct page, auto increment
{X}+
In this mode, a address is specified within direct page by
the X register and the content of X is increased by 1.
LDA, STA
Example; G=0, X=35
H
DB
LDA
{X}+
X indexed direct page (8 bit offset)
dp+X
This address value is the second byte (Operand) of com-
mand plus the data of
-register. And it assigns the mem-
ory in Direct page.
ADC, AND, CMP, EOR, LDA, LDY, OR, SBC, STA
STY, XMA, ASL, DEC, INC, LSR, ROL, ROR
Example; G=0, X=0F5
H
C645
LDA
45H+X
98
0F100
H
~
~
~
~
data
135
H
01
0F102
H
35
0F101
H
data+1
data
address: 0135
data
D4
115
H
0E550
H
data
A
~
~
~
~
data
DB
35
H
data
A
~
~
~
~
36H
X
data
45
3A
H
0E551
H
data
A
~
~
~
~
C6
0E550
H
45H+0F5H=13AH
HMS81004E/08E/16E/24E/32E
28
JUNE 2001 Ver 1.00
Y indexed direct page (8 bit offset)
dp+Y
This address value is the second byte (Operand) of com-
mand plus the data of Y-register, which assigns Memory in
Direct page.
This is same with above (2). Use Y register instead of X.
Y indexed absolute
!abs+Y
Sets the value of 16-bit absolute address plus Y-register
data as Memory. This addressing mode can specify mem-
ory in whole area.
Example; Y=55
H
D500FA
LDA
!0FA00H+Y
(6) Indirect Addressing
Direct page indirect
[dp]
Assigns data address to use for accomplishing command
which sets memory data(or pair memory) by Operand.
Also index can be used with Index register X,Y.
JMP, CALL
Example; G=0
3F35
JMP
[35H]
X indexed indirect
[dp+X]
Processes memory data as Data, assigned by 16-bit pair
m e m o r y w h i c h i s d e t e r m i n e d b y p a i r d a t a
[dp+X+1][dp+X] Operand plus
X-register data in Direct
page.
ADC, AND, CMP, EOR, LDA, OR, SBC, STA
Example; G=0, X=10
H
1625
ADC
[25H+X]
D5
0F100
H
data
A
~
~
~
~
data
0FA55
H
0FA00H+55H=0FA55H
FA
0F102
H
00
0F101
H
0A
35
H
jump to address 0E30A
H
~
~
~
~
35
0FA00
H
E3
36
H
3F
0E30A
H
NEXT
~
~
~
~
05
35
H
0E005
H
~
~
~
~
25
0FA00
H
E0
36
H
16
0E005
H
data
~
~
~
~
A + data + C
A
25 + X(10) = 35
H

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
29
Y indexed indirect
[dp]+Y
Processes momory data as Data, assigned by the data
[dp+1][dp] of 16-bit pair memory paired by Operand in Di-
rect page
plus Y-register data.
ADC, AND, CMP, EOR, LDA, OR, SBC, STA
Example; G=0, Y=10
H
1725
ADC
[25H]+Y
Absolute indirect
[!abs]
The program jumps to address specified by 16-bit absolute
address.
JMP
Example; G=0
1F25E0
JMP
[!0C025H]
05
25
H
0E005
H
+ Y(10) = 0E015
H
~
~
~
~
25
0FA00
H
E0
26
H
17
0E015
H
data
~
~
~
~
A + data + C
A
25
0E025
H
jump to
~
~
~
~
E0
0FA00
H
E7
0E026
H
25
0E725
H
NEXT
~
~
~
~
1F
PROGRAM MEMORY
address 0E30A
H

HMS81004E/08E/16E/24E/32E
30
JUNE 2001 Ver 1.00
9. I/O PORTS
The HMS81004E/08E/16E/24E/32E has 24 I/O ports
which are PORT0(8 I/O), PORT1 (8 I/O), PORT2 (8 I/O).
Pull-up resistor of each port can be selectable by program.
Each port contains data direction register which controls I/
O and data register which stores port data.
9.1 R0 Ports
R0 is an 8-bit CMOS bidirectional I/O port (address
0C0
H
). Each I/O pin can independently used as an input or
an output through the R0DD register (address 0C1
H
).
R0 has internal pull-ups that is independently connected or
disconnected by R0PC. The control registers for R0 are
shown below.
(1) R0 I/O Data Direction Register (R0DD)
R0 I/O Data Direction Register (R0DD) is 8-bit register,
and can assign input state or output state to each bit. If
R0DD is "1", port R0 is in the output state, and if "0", it is
in the input state. R0DD is write-only register. Since
R0DD is initialized as "00h" in reset state, the whole port
R0 becomes input state.
(2) R0 Data Register (R0)
R0 data register (R0) is 8-bit register to store data of port
R0. When set as the output state by R0DD, and data is writ-
ten in R0, data is outputted into R0 pin. When set as the in-
put state, input state of pin is read. The initial value of R0
is unknown in reset state.
(3) R0 Open drain Assign Register (R0ODC)
R0 Open Drain Assign Register (R0ODC) is 8bit register,
and can assign R0 port as open drain output port each bit,
if corresponding port is selected as output. If R0ODC is
selected as "1", port R0 is open drain output, and if select-
ed as, "0" it is push-pull output. R0ODC is write-only reg-
ister and initialized as "00h" in reset state.
(4) R0 Pull-up Control Register (R0PC)
R0 Pull-up Control Register (R0PC) is 8-bit register and
can control pull-up on or off each bit, if corresponding port
is selected as input. If R0PC is selected as "1", pull-up ia
disabled and if selected as "0", it is enabled. R0PC is write-
only register and initialized as "00h" in reset state. The
pull-up is automatically disabled, if corresponding port is
selected as output.
9.2 R1 Ports
R1 is an 8-bit CMOS bidirectional I/O port (address
0C2
H
). Each I/O pin can independently used as an input or
an output through the R1DD register (address 0C3
H
).
R1 has internal pull-ups that is independently connected or
disconnected by register R1PC. The control registers for
R1 are shown below.
R0 Data Register (R/W)
R0
ADDRESS : 0C0
H
RESET VALUE : Undefined
R07 R06 R05 R04 R03 R02 R01 R00
Port Direction
R0 Direction Register (W)
R0DD
ADDRESS : 0C1
H
RESET VALUE : 00
H
0: Input
1: Output
Pull-up select
R0 Pull-up Control Register (W)
R0PC
ADDRESS :0F8
H
RESET VALUE : 00
H
1: Without pull-up
0: With pull-up
Open drain select
R0 Open drain Assign Register (W)
R0ODC
ADDRESS :0E4
H
RESET VALUE : 00
H
0: Push-pull
1: Open drain
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
31
(1) R1 I/O Data Direction Register (R1DD)
R1 I/O Data Direction Register (R1DD) is 8-bit register,
and can assign input state or output state to each bit. If
R1DD is "1", port R1 is in the output state, and if "0", it is
in the input state. R1DD is write-only register. Since
R1DD is initialized as "00h" in reset state, the whole port
R1 becomes input state.
(2) R1 Data Register (R1)
R1 data register (R1) is 8-bit register to store data of port
R1. When set as the output state by R1DD, and data is
written in R1, data is outputted into R1 pin. When set as
the input state, input state of pin is read. The initial value
of R1 is unknown in reset state.
(3) R1 Open drain Assign Register (R1ODC)
R1 Open Drain Assign Register (R1ODC) is 8bit register,
and can assign R1 port as open drain output port each bit,
if corresponding port is selected as output. If R1ODC is
selected as "1", port R1 is open drain output, and if select-
ed as "0", it is push-pull output. R1ODC is write-only reg-
ister and initialized as "00h" in reset state.
(4) R1 Port Mode Register (PMR1)
R1 Port Mode Register (PMR1) is 8-bit register, and can
assign the selection mode for each bit. When set as "0",
corresponding bit of PMR1 acts as port R1 selection mode,
and when set as "1", it becomes function selection mode.
PMR1 is write-only register and initialized as "00h" in re-
set state. Therefore, becomes Port selection mode. Port
R1 can be I/O port by manipulating each R1DD bit, if cor-
responding PMR1 bit is selected as "0".
(5) R1 Pull-up Control Register (R1PC)
R1 Pull-up Control Register (R1PC) is 8-bit register and
can control pull-up on or off each bit, if corresponding port
is selected as input. If R1PC is selected as "1", pull-up ia
disabled and if selected as "0", it is enabled. R1PC is write-
only register and initialized as "00h" in reset state. The
R1 Data Register (R/W)
R1
ADDRESS : 0C2
H
RESET VALUE : Undefined
R17 R16 R15 R14 R13 R12 R11 R10
Port Direction
R1 Direction Register (W)
R1DD
ADDRESS : 0C3
H
RESET VALUE : 00
H
0: Input
1: Output
Pull-up select
R1 Pull-up Control Register (W)
R1PC
ADDRESS : 0F9
H
RESET VALUE : 00
H
1: Without pull-up
0: With pull-up
Open drain select
R1 Open drain Assign Register (W)
P1ODC
ADDRESS : 0DE
H
RESET VALUE : 00
H
0: Push-pull
1: Open drain
Mode select
R1 Port Mode Register (W)
PMR1
ADDRESS : 0C9
H
RESET VALUE : 00
H
0: Port R1 selection
1: Function selection
Pin Name
PMR1
Selection
Mode
Remarks
T0S
0
R17 (I/O)
-
1
T0 (O)
Timer0
T1S
0
R16 (I/O)
-
1
T1 (O)
Timer1
T2S
0
R15 (I/O)
-
1
T2 (O)
Timer2
ECS
0
R14 (I/O)
-
1
EC (I)
Timer0 Event
INT2S
0
R12 (I/O)
1
INT2 (I)
Timer0 Input Cap-
ture
INT1S
0
R11 (I/O)
1
INT1 (I)
Table 9-1 Selection mode of PMR1
HMS81004E/08E/16E/24E/32E
32
JUNE 2001 Ver 1.00
pull-up is automatically disabled, if corresponding port is
selected as output.
9.3 R2 Port
R2 is an 8-bit CMOS bidirectional I/O port (address
0C4
H
). Each I/O pin can independently used as an input or
an output through the R2DD register (address 0C5
H
).
R2 has internal pujll-ups that is independently connected
or disconnected by R2PC (address 0FA
H
). The control reg-
isters for R2 are shown as below.
(1) R2 I/O Data Direction Register (R2DD)
R2 I/O Data Direction Register (R2DD) is 8-bit register,
and can assign input state or output state to each bit. If
R2DD is "1", port R2 is in the output state, and if "0", it is
in the input state. R2DD is write-only register. Since
R2DD is initialized as "00h" in reset state, the whole port
R2 becomes input state.
(2) R2 Data Register (R2)
R2 data register (R2) is 8-bit register to store data of port
R2. When set as the output state by R2DD, and data is writ-
ten in R2, data is outputted into R2 pin. When set as the in-
put state, input state of pin is read. The initial value of R2
is unknown in reset state.
(3) R2 Open drain Assign Register (R2ODC)
R2 Open Drain Assign Register (R2ODC) is 8bit register,
and can assign R2 port as open drain output port each bit,
if corresponding port is selected as output. If R2ODC is
selected as "1", port R2 is open drain output, and if select-
ed as "0", it is push-pull output. R2ODC is write-only reg-
ister and initialized as "00h" in reset state.
(4) R2 Pull-up Control Register (R2PC)
R2 Pull-up Control Register (R2PC) is 8-bit register and
can control pull-up on or off each bit, if corresponding port
is selected as input. If R2PC is selected as "1", pull-up ia
disabled and if selected as "0", it is enabled. R2PC is write-
only register and initialized as "00h" in reset state. The
pull-up is automatically disabled, if corresponding port is
selected as output.
R2 Data Register (R/W)
R2
ADDRESS : 0C4
H
RESET VALUE : Undefined
-
-
R24 R23 R22 R21 R20
Port Direction
R2 Direction Register (W)
R2DD
ADDRESS : 0C5
H
RESET VALUE : 00
H
0: Input
1: Output
Pull-up select
R2 Pull-up Control Register (W)
R2PC
ADDRESS :0FA
H
RESET VALUE : 00
H
1: Without pull-up
0: With pull-up
Open drain select
R2 Open drain Assign Register (W)
R2ODC
ADDRESS :0DF
H
RESET VALUE : 00
H
0: Push-pull
1: Open drain
-

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
33
10. CLOCK GENERATOR
Clock generating circuit consists of Clock Pulse Generator
(C.P.G), Prescaler, Basic Interval Timer (B.I.T) and Watch
Dog Timer. The clock applied to the Xin pin divided by
two is used as the internal system clock.
Prescaler consist of 12-bit binary counter. The clock sup-
plied from oscillation circuit is input to prescaler(fex)
The divided output from each bit of prescaler is provided
to periphera hardwarel
Clock to peripheral hardware can be stopped by bit4 (EN-
PCK) of CKCTLR Register. ENPCK is set to "1" in reset
state.
Clock Control Register (W)
CKCTLR
ADDRESS : 0C7
H
INITIAL VALUE : --110111b
0
1
2
3
4
5
6
7
ENPCK 0: Stopped
1: Provided
Figure 10-1 Block diagram of Clock Generator
Internal system clock (CPU clock)
PRESCALER
˜
1
Peripheral clock
˜
2
˜
4
˜
8
˜
16
˜
128
˜
256
˜
512
˜
1024
˜
32
˜
64
PS0
PS1
PS2
PS3
PS4
PS5
PS6
PS7
PS8
PS9
PS10
CLOCK PULSE
f
EX
(MHz)
PS0
PS3
PS2
PS4
PS1
PS10
PS9
PS5
PS6
PS7
4
Frequency
period
4M
1M
500K
250K
2M
125K
62.5K
250n
500n
1u
2u
4u
8u
16u
32u
64u
256u
128u
3.906K
7.183K
15.63K
31.25K
PS8
GENERATOR
OSC
CIRCUIT
PS11
PS12
1.953K
512u
0.976K
1024u
PS11 PS12
˜
2048
˜
4096
fex

HMS81004E/08E/16E/24E/32E
34
JUNE 2001 Ver 1.00
10.1 Oscillation Circuit
Oscillation circuit is designed to be used either with a ce-
ramic resonator or crystal oscillator. Figure 10-2 shows
circuit diagrams using a crystal (or ceramic) oscillator. As
shown in the diagram, oscillation circuits can be construct-
ed by connecting a oscillator between Xout and Xin. Colck
from oscillation circuit makesCPU clock via clock pulse
generator, and then enters prescaler to make peripheral
hardware clock. Alternately, the oscillator may be driven
from an esternal source as Figure 10-3 . In the STOP
mode,oscillation stop, Xout state goes to "HIGH" , Xin
state goes to "LOW" , and built-in feed back resistor is dis-
abled.
Oscillation circuit is designed to be used either with a ce-
ramic resonator or crystal oscillator. Since each crystal and
ceramic resonator have their own characteristics, the user
should consult the crystal manufacturer for appropriate
values of external components. In addition, see Figure 10-
4 for the layout of the crystal.
Note: Minimize the wiring length. Do not allow the wiring to
intersect with other signal conductors. Do not allow the wir-
ing to come near changing high current. Set the potential of
the grounding position of the oscillator capacitor to that of
V
SS
. Do not ground it to any ground pattern where high cur-
rent is present. Do not fetch signals from the oscillator.
Figure 10-4 Recommend Layout of Oscillator PCB
circuit
Figure 10-2 External Crystal(Ceramic) oscillator circuit
Figure 10-3 External clock input circuit
Xout
Xin
Vss
Cout
Cin
Xout
Xin
Vss
OPEN
External
Clock
Source
X
OUT
X
IN
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
35
Frequency
Resonator Maker
Part Name
Load Capacitor
Operating Voltage
2.00MHz
CQ
ZTT2.00
Cin=Cout=open
2.0~3.6
CQ
ZTA2.00
Cin=Cout=30pF
2.0~3.6
MURATA
CSTLS2M00G56-B0
Cin=Cout=open
2.0~3.6
MURATA
CSTCC2.00MG0H6
Cin=Cout=open
2.0~3.6
MURATA
CSTCC2M00G56-R0
Cin=Cout=open
2.0~3.6
4.00MHz
CQ
ZTT4.00
Cin=Cout=open
2.0~3.6
CQ
ZTA4.00
Cin=Cout=30pF
2.0~3.6
MURATA
CSTS0400MG06
Cin=Cout=open
2.0~3.6
MURATA
CSTLS4M00G56-B0
Cin=Cout=open
2.0~3.6
MURATA
CSTCR4M00G55-R0
Cin=Cout=open
2.0~3.6
TDK
FCR4.0MC5
Cin=Cout=open
2.0~3.6
TDK
FCR4.0MSC5
Cin=Cout=open
2.0~3.6
CORETECK
CRT4.00MS
Cin=Cout=open
2.0~3.6
CORETECK
CRM4.00MS
Cin=Cout=30pF
2.0~3.6
Table 10-1 Recommendalbe resonator
HMS81004E/08E/16E/24E/32E
36
JUNE 2001 Ver 1.00
11. BASIC INTERVAL TIMER
The HMS81004E/08E/16E/24E/32E has one 8-bit Basic
Interval Timer that is free-run and can not stop. Block dia-
gram is shown in Figure 11-1 .
The Basic Interval Timer generates the time base for
Standby release time, watchdog timer counting, and etc. It
also provides a Basic interval timer interrupt (IFBIT). As
the count overflow from FF
H
to 00
H
, this overflow causes
the interrupt to be generated.
-8bit binary up-counter
-Use the bit output of prescaler as input to secure the oscil-
lation stabilization time after power-on
-Secures the oscillation stabilization time in standby mode
(stop mode) release
-Contents of B.I.T can be read
-Provides the clock for watch dog timer
The Basic Interval Timer is controlled by the clock control
register (CKCTLR) shown in Figure 11-2 . If bit3(BTCL)
of CKCTLR is set to "1", B.I.T is cleared, and then, after
one machine cycle, BTCL becomes "0", and B.I.T starts
counting. BTCL is set to ``0`` in reset state.
The input clock of B.I.T can be selected from the prescaler
within a range of 2us to 256us by clock input selection bits
(BTS2~BTS0). (at fex = 4MHz). In reset state, or power
on reset, BTS2="1", BTS1= "1", BTS0= "1" to secure the
longest oscillation stabilization time. B.I.T can generate
the wide range of basic interval time interrupt request (IF-
BIT) by selecting prescaler output.
By reading of the Basic Interval Timer Register (BITR),
we can read counter value of B.I.T. Because B.I.T can be
cleared or read, the spending time up to maximum 65.5ms
can be available. B.I.T is read-only register. If B.I.T reg-
ister is written, then CKCTLR register with same address
is written.
Figure 11-1 Block diagram of Basic Interval Timer
MUX
Basic Interval Timer Interrupt
Select Input clock 3
Basic Interval Timer
source
clock
8-bit up-counter
BTS[2:0]
BTCL
˜
8
˜
1024
˜
512
˜
256
˜
128
˜
64
˜
32
˜
16
To Watchdog timer (WDTR)
CKCTLR
clear
overflow
Internal bus line
clock control register
[0C7
H
]
IFBIT
Read
P
r
esca
ler
BITR
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
37
Figure 11-2 CKCTLR AND BITR
BTS[2:0]
CPU Source clock
B.I.T. Input
clock@4Mhz(us)
Standby release
time(ms)
000
001
010
011
100
101
110
111
˜
8
˜
16
˜
32
˜
64
˜
128
˜
256
˜
512
˜
1024
2
4
8
16
32
64
128
256
0.512
1.024
2.048
4.096
8.192
16.384
32.768
65.536
BTCL
7
6
5
4
3
2
1
0
-
-
BTS1
Basic Interval Timer source clock select
000: f
XIN
˜
8
001: f
XIN
˜
16
010: f
XIN
˜
32
011: f
XIN
˜
64
100: f
XIN
˜
128
101: f
XIN
˜
256
110: f
XIN
˜
512
111: f
XIN
˜
1024
Clear bit
0: Normal operation, free-run
1: Clear 8-bit counter (BITR) to "0" and count up again.
INITAIL VALUE: --110111
B
ADDRESS: 0C7
H
CKCTLR
INITIAL VALUE: Undefined
ADDRESS: 0C7
H
BITR
Both register are in same address,
when write, to be a CKCTLR,
when read, to be a BITR.
Caution:
8-BIT FREE-RUN BINARY COUNTER
BTS0
BTS2
BTCL
BTCL
7
6
5
4
3
2
1
0
R
W
W
W
W
W
R
R
R
R
R
R
R
ENPCK
This bit becomes to "0" automatically after one machine cycle.
Periphral clock
0:stopped
1:provided
WDTON
W
Watch Dog Timer function control
0:6bit timer
1:Watch Dog Timer

HMS81004E/08E/16E/24E/32E
38
JUNE 2001 Ver 1.00
12. WATCH DOG TIMER
Watch Dog Timer (WDT) consists of 6-bit binary counter,
6-bit comparator, and Watch Dog Timer Register
(WDTR).Watch Dog Timer can be used 6-bit general Tim-
er or specific Watch dog timer by setting bit5 (WDTON)
of Clock Control Register (CKCTLR).By assigning
bit6(WDTCL) of WDTR, 6-bit counter can be cleared.
WDT Interrupt (IFWDT) interval is determined by the in-
terrupt IFBIT interval of Basic Interval Timer and the val-
ue of WDT Register.
-Interval of IFWDT = (IFBIT interval) * (WDTR value)
As IFBIT (Basic Interval Timer Interrupt Request) is used
for input clock of WDT, Input clock cycle is possible from
512 us to 65,536 us by BTS. (at fex = 4MHz)
*At Hardware reset time,WDT starts automatically.
Therefore the user must select the CKCTLR and WDTR
before WDT overflow.
-Reset WDTR value = 0F
h
,=15
-Interval of WDT = 65,536 * 15 = 983040 us
(about 1second )
N o t e : W h e n W D T R R e g i s t e r v a l u e i s 6 3 ( 3 F h )
(Caution) : Do not use "0" for WDTR Register value.
Device come into the reset state by WDT
Figure 12-1 Block diagram of Watch Dog Timer
IFWDT
WDT
INTERRUPT
WDTR (6-bit)
WDT (6-bit)
Comparator
WDT
BTCL
7
6
5
4
3
2
1
0
-
INITIAL VALUE: -0001111
b
ADDRESS: 0C8
H
WDTR
WDTCL
[0C8
H
]
WDTR5 WDTR4 WDTR3 WDTR2 WDTR1 WDTR0
Watch Dog Timer Operation
0:Free-run
1:Automatically cleared, after one machine cycle
IFBIT
WDTON
To Reset circuit
Clear 6

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
39
13. Timer0, Timer1, Timer2
(1) Timer Operation Mode
Timer consists of 16bit binary counter Timer0 (T0), 8bit
binary Timer1 (T1), Timer2 (T2), Timer Data Register,
Timer Mode Register (TM01, TM0, TM1, TM2) and con-
trol circuit. Timer Data Register Consists of Timer0 High-
MSB Data Register (T0HMD), Timer0 High-LSB Data
Register (T0HLD), Timer0 Low-MSB Data Register
(T0LMD), Timer0 Low-LSB Data Register (T0LLD),
Timer1 High Data Register (T1HD), Timer1 Low Data
Register (T1LD), Timer2 Data Register (T2DR). Any of
the PS0 ~ PS5, PS11 and external event input EC can be
selected as clock source for T0. Any of the PS0 ~ PS3, PS7
~ PS10 can be selected as clock T1. Any of the PS5 ~ PS12
can be selected as clock source for T2.
* Relevant Port Mode Register (PMR1 : 00C9h) value
should be assigned for event counter.
Timer0
- 16-bit Interval Timer
- 16-bit Event Counter
- 16-bit Input Capture
- 16-bit rectangular-wave output
- Single/Modulo-N Mode
- Timer Output Initial Value Setting
- Timer0~Timer1 combination Logic Output
- One Interrupt Generating Every 2nd
Counter Overflow
Timer1
- 8-bit Interval Timer
- 8-bit rectangular-wave output
Timer2
- 8-bit Interval Timer
- 8-bit rectangular-wave output
- Modulo-N Mode
Table 13-1 Timer Operation
16bit Timer (T0)
8bit Timer (T1)
8bit Timer (T2)
Resolution
MAX. Count
Resolution
MAX. Count
Resolution
MAX. Count
PS0 (0.25us)
16,384us
PS0 (0.25us)
64us
PS5 (8us)
2,048us
PS1 (0.5us)
32,768us
PS1 (0.5us)
128us
PS6 (16us)
4,096us
PS2 (1us)
65,536us
PS2 (1us)
256us
PS7 (32us)
8,192us
PS3 (2us)
131,072us
PS3 (2us)
512us
PS8 (64us)
16,384us
PS4 (4us)
262,144us
PS7 (32us)
8,192us
PS9 (128us)
32,768us
PS5 (8us)
524,288us
PS8 (64us)
16,384us
PS10 (256us)
65,536us
PS11 (512us)
33,554,432us
PS9 (128us)
32,768us
PS11 (512us)
131,072us
EC
-
PS10 (256us)
65,536us
PS12 (1024us)
262,144us
Table 13-2 Function of Timer & Counter

HMS81004E/08E/16E/24E/32E
40
JUNE 2001 Ver 1.00
Figure 13-1 Block Diagram of Timer/Counter
T0HMD T0LMD
T0LMD
T0LLD
T1HD
T1LD
T2DR
Timer0 (16bit)
Polarity
Timer2(8bit)
Timer1(8bit)
Selection
Edge
Selection
Tout
Logic
BTC L
-
T O U T1 TO U T0
T0O U TP
TO U TS TO U TB
T0IN IT T1IN IT
7
0
TM01
from
EC/R14
from
INT2/R12
(Capture Signal)
T0OUT
(R17)
TOUT
(REMOUT)
T1OUT
(R16)
T2OUT
(R15)
BT C L
7
6
5
4
3
2
1
0
-
INITIAL VALUE: 00
H
ADDRESS: 0DA
H
TM01
T O U T 1 T O U T 0
R/W
R/W
R/W
R/W
R/W
T0O U TP
Timer 01 mode register
TOUT LOGIC
0: Timer1 output low
1: Timer1 output high
Timer1 output initial value
0: T0OUT Polarity Equal to TOUT Logic input signal
1: T0OUT Polarity Reverse to TOUT Logic input signal
T0OUT Polarity Selection
(TOUT Logic or TOUTB)
0: Bit(TOUTB) Output Through REMOUT
REMOUT Port Output Selection
0: REMOUT Output Low
1: REMOUT Output High
REMOUT Port Bit Control
R/W
R/W
TO U TS T O U T B
00: AND of T0 OUTPUT and T1 OUTPUT
01: NAND of T0 OUTPUT and T1 OUTPUT
10: OR of T0 OUTPUT and T1 OUTPUT
11: NOR of T0 OUTPUT and T1 OUTPUT
T 0IN IT T 1IN IT
1: TOUT Logic Output Through REMOUT
0: Timer0 output low
1: Timer0 output high
Timer0 output initial value

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
41
Figure 13-2 Block Diagram of Timer0
BTC L
7
6
5
4
3
2
1
0
T 0C N
T 0IFS
INITIAL VALUE: 00
H
ADDRESS: 0D0
H
TM0
T0SL2
T 0SL1 T0SL0
R/W
R/W
R/W
R/W
R/W
R/W
T0M O D
Timer 0 mode register
Timer0 input clock select (fex=4Mhz)
0: Modulo-N
1: Single Mode
0: Interrupt Every Count Overflow
1: Interrupt Every 2nd Count Overflow
Timer0 Single/Moudol-N select
Timer0 Interrupt select
0: Count Pause
1: Count Continuation
Timer0 Counter Continuation/Pause Control
0: Timer/Counter
1: Input capture (PS1:not supporting
Timer0 Interrupt select
0: Timer0 Stop
1: Tiemr0 Start after clear
Timer0 Start/Stop control
R/W
R/W
C AP0
T0ST
input cature)
000: PS0 250ns
001: PS1 500ns
010: PS2 1us
011: PS3 2us
100: PS4 4us
101: PS5 8us
110: PS11 512us
111: EC
T 0 S L [2 :0 ]
M U X
0 0 0
0 0 1
0 1 0
P S 4
P S 5
P S 11
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
E d g e D e te cto r
EC PIN
IFINT2
INT2
INTERRUPT
01
10
11
capture
IEDS[5:4]
Comparator
INT2/R12 PIN
clear
Pr
e
s
c
a
l
e
r
T0HC
T0LC
T0 COUNTER (16-bit)
[0D5
H
][0D6
H
]
16 BITS
MSB
LSB
P S 3
P S 2
P S 1
P S 0
T0MOD T0CN
T0ST
delay
1
0
clear
CAP0
MUX(16-bit)
T0HMD
T0HLD
T0LMD
T0LLD
[0D3
H
][0D4
H
]
[0D5
H
][0D6
H
]
1
0
CAP0
OUTPUT
GEN.
Interrupt
GEN.
T0INIT
T0OUT
T0IFS
IFT0

HMS81004E/08E/16E/24E/32E
42
JUNE 2001 Ver 1.00
Figure 13-3 Block Diagram of Timer1
T 1S L [2 :0 ]
M U X
0 00
0 01
0 10
P S 7
P S 8
P S 9
0 11
1 00
1 01
1 10
1 11
Comparator
clear
P
r
e
scal
e
r
T1 COUNTER (8-bit)
P S 3
P S 2
P S 1
P S 0
T1MOD T1CN
T1ST
[0D8
H
]
OUTPUT
GEN.
Interrupt
GEN.
T1INIT
T1OUT
T1IFS
IFT1
P S 1 0
T1 COUNT REG.
MUX(8-bit)
T1HD(8-bit)
T1LD(8-bit)
1
0
[0D7
H
]
[0D8
H
]
BT C L
7
6
5
4
3
2
1
0
T1C N
-
INITIAL VALUE: 00
H
ADDRESS: 0D1
H
TM1
T1SL2
T 1S L1 T 1SL0
R/W
R/W
R/W
R/W
R/W
T1M O D
Timer 1 mode register
Timer1 input clock select (fex=4Mhz)
0: Modulo-N
1: Single Mode
0: Interrupt Every Count Overflow
1: Interrupt Every 2nd Count Overflow
Timer1 Single/Moudol-N select
Timer1 Interrupt select
0: Count Pause
1: Count Continuation
Timer1 Counter Continuation/Pause Control
0: Timer1 Stop
1: Tiemr1 Start after clear
Timer1 Start/Stop control
R/W
R/W
T1S T
000: PS0 250ns
001: PS1 500ns
010: PS2 1us
011: PS3 2us
100: PS7 32us
101: PS8 64us
110: PS9 128us
111: PS10 256us
T 1IFS
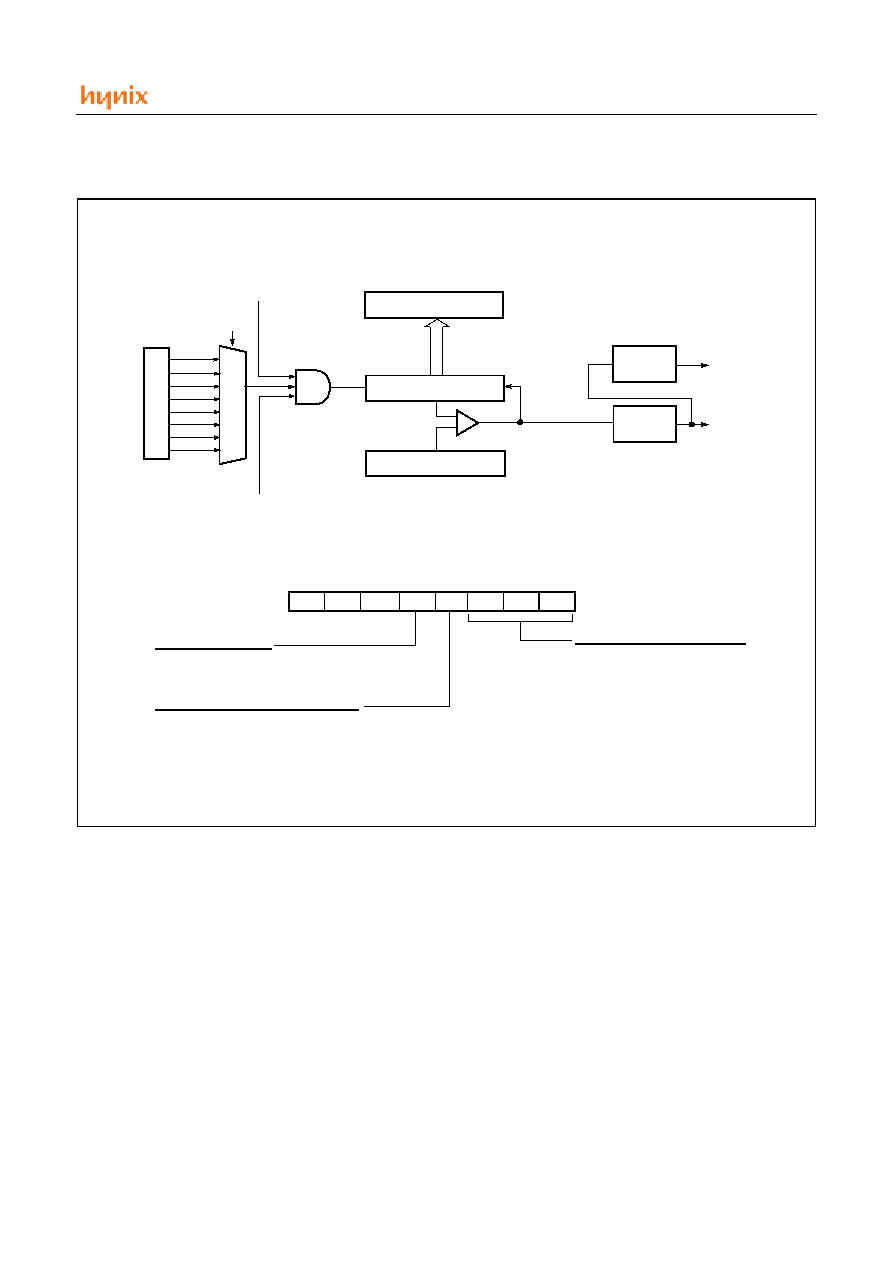
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
43
Figure 13-4 Block Diagram of Timer2
T 2S L [2 :0 ]
M U X
0 00
0 01
0 10
P S 9
P S 1 0
P S 1 1
0 11
1 00
1 01
1 10
1 11
Comparator
clear
P
r
e
scal
e
r
T2 COUNTER (8-bit)
P S 8
P S 7
P S 6
P S 5
T2CN
T2ST
[0D9
H
]
OUTPUT
GEN.
Interrupt
GEN.
T2OUT
IFT2
P S 1 2
T2 COUNT REG.
[0D9
H
]
T2DR
BTC L
7
6
5
4
3
2
1
0
T2C N
INITIAL VALUE: 00
H
ADDRESS: 0D2
H
TM2
T2SL2
T 2S L1 T2SL0
R/W
R/W
R/W
R/W
R/W
Timer 2 mode register
Timer2 input clock select (fex=4Mhz)
0: Count Pause
1: Count Continuation
Timer2 Counter Continuation/Pause Control
0: Timer2 Stop
1: Tiemr2 Start after clear
Timer2 Start/Stop control
T2ST
000: PS5 8us
001: PS6 16us
010: PS7 32us
011: PS8 64us
100: PS9 128us
101: PS10 256us
110: PS11 512us
111: PS12 1,024us
-
-
-

HMS81004E/08E/16E/24E/32E
44
JUNE 2001 Ver 1.00
2) Timer0, Timer1
TIMER0 and TIMER1 have an up-counter. When value of
the up-counter reaches the content of Timer Data Register
(TDR), the up-counter is cleared to "00h", and interrupt
(IFT0, IFT1) is occured at the next clock.
For Timer0, the internal clock (PS) and the external clock
(EC) can be selected as counter clock. But Timer1 and
Timer2 use only internal clock. As internal clock. Timer0
can be used as internal-timer which period is determined
by Timer Data Register (TDR). Chosen as external
clock, Timer0 executes as event-counter. The counter ex-
ecution of Timer0 and Timer1 is controlled by T0CN,
T0ST, CAP0, T1CN, T1ST, of Timer Mode Register TM0
and TM1. T0CN, T1CN are used to stop and start Timer0
and Timer1 without clearing the counter. T0ST, T1ST is
used to clear the counter. For clearing and starting the
counter, T0ST or T1ST should be temporarily set to "0"
and then set to "1". T0CN, T1CN, T0ST and T1ST should
be set "1", when Timer counting-up. Controlling of
CAP0 enables Timer0 as input capture. By programming
of CAP0 to "1", the period of signal from INT2 can be
measured and then, event counter value for INT2 can be
read. During counting-up, value of counter can be read-
Timer execution is stopped by the reset signal(RE-
SET="L")
Note: In the process of reading 16-bit Timer Data, first
read the upper 8-bit data. Then read the lower 8-bit data,
and read the upper 8-bit data again. If the earlier read up-
per 8-bit data are matched with the later read upper 8-bit
data, read 16-bit data are correct. If not, caution should be
taken in the selection of upper 8-bit data.
(Example)
1) Upper 8-bit Read 0A 0A
2) Lower 8-bit Read FF 01
3) Upper 8-bit Read 0B 0B
=====================
0AFF 0B01
Figure 13-5 Operation of Timer0
~~
Timer 0 (IFT0)
Interrupt
T0 Data
TIME
Occur interrupt
Occur interrupt
Occur interrupt
Interrupt period
up
-c
ou
nt
~~
~~
0
1
2
3
4
5
6
MATCH
(TDR = T0)
0
Register
Value
T0 Value

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
45
Figure 13-6 Start/Stop Operation of Timer0
Timer 0 (IFT0)
Interrupt
TDR
TIME
Occur interrupt
Occur interrupt
stop
clear & start
disable
enable
Start & Stop
T0ST
T0CN
Control count
up
-c
ount
~~
~~
T0ST = 0
T0ST = 1
T0CN = 0
T0CN = 1
Figure 13-7 Input capture operation of Timer0
T3
INT2
T2
T1
T0

HMS81004E/08E/16E/24E/32E
46
JUNE 2001 Ver 1.00
3) Single/Modulo-N Mode
Timer0 (Timer1) can select initial (T0INIT, T1INIT of
TM01) output level of Timer Output port. If initial level is
"L", Low-Data Register value of Timer Data Register is
transferred to comparator and T0OUT (T1OUT) is to be
"Low", if initial level is High? High -Data Register is
transferred and to be "High". Single Mode can be set by
Mode Select bit (T0MOD, T1MOD) of Timer Mode Reg-
ister (TM0, TM1) to "1" When used as Single Mode, Tim-
er counts up and compares with value of Data Register. If
the result is same, Time Out interrupt occurs and level
of Timer Output port toggle, then counter stops as reset
state. When used as Modulo-N Mode, T0MOD (T1MOD)
should be set "0". Counter counts up until the value of
Data Register and occurs Time-out interrupt. The level of
Timer Output port toggle and repeats process of
counting the value which is selected in Data Register.
During Modulo-N Mode, If interrupt select bit (T0IFS,
T1IFS) of Mode Register is "0", Interrupt occurs on every
Time-out. If it is "1", Interrupt occurs every second time-
out.
Note: Timer Output is toggled whenever time out happen
(4) Timer 2
Timer2 operates as a up-counter. The content of T2DR are
compared with the contents of up-counter. If a match is
found. Timer2 interrupt (IFT2) is generated and the up-
counter is cleared to "00h". Therefore, Timer2 executes
as a interval timer. Interrupt period is determined by the
count source clock for the Timer2 and content of T2DR.
When T2ST is set to "1", count value of Timer 2 is cleared
and starts counting-up. For clearing and starting the
Timer2. T2ST have to set to "1" after set to "0". In order to
write a value directly into the T2DR, T2ST should be set
to "0". Count value of Timer2 can be read at any time.
Figure 13-8 Operation Diagram for Single/Modulo-N Mode
[ Single Mode ]
[ Module-N Mode ]
8bit/16bit
Timer Enable initial
8bit/16bit
counting
value toggle
counting
Timer Enable initial
value toggle
Timer-output toggle
Int occurs (IFS=1) Each 2nd time out
Int occurs (IFS=0) when Time out

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
47
14. INTERRUPTS
The HMS81004E/08E/16E/24E/32E interrupt circuits
consist of Interrupt Mode Register (MOD), Interrupt en-
able register (IENH, IENL), Interrupt request flags of
IRQH, IRQL, Priority circuit and Master enable flag ("I"
flag of PSW). 8 interrupt sources are provided. The config-
uration of interrupt circuit is shown in Figure 14-1 .
The HMS81004E/08E/16E/24E/32E contains 8 interrupt
sources; 3 externals and 5 internals. Nested interrupt ser-
vices with priority control is also possible. Software inter-
rupt is non-maskable interrupt, the others are all maskable
interrupts.
- 8 interrupt source (2Ext, 3Timer, BIT, WDT and
Key Scan)
- 8 interrupt vector
- Nested interrupt control is possible
- Programmable interrupt mode
(Hardware and software interrupt accept mode)
- Read and write of interrupt request flag are possible.
- In interrupt accept, request flag is automatically cleared.
Figure 14-1 Block Diagram of Interrupt
INT1
INT2
Watch Dog Timer
WDTR
IENL
Interrupt Enable
Interrupt Enable
IRQL
IRQH
Interrupt
Vector
Address
Generator
Internal bus line
Register (Higher byte)
Internal bus line
Register (Lower byte)
Release STOP
To CPU
Interrupt Master
Enable Flag
I-flag
IENH
P
r
i
o
ri
ty C
ont
rol
I-flag is in PSW, it is cleared by "DI", set by
"EI" instruction. When it goes interrupt service,
I-flag is cleared by hardware, thus any other
interrupt are inhibited. When interrupt service is
completed by "RETI" instruction, I-flag is set to
"1" by hardware.
INT2R
T0R
BITR
KSCNR
Key Scan
Basic Interval Timer
INT1R
T2R
T1R
Timer 2
Timer 1
Timer 0

HMS81004E/08E/16E/24E/32E
48
JUNE 2001 Ver 1.00
14.1 Interrupt priority and sources
Each interrupt vector is independent and has its own pri-
ority. Software interrupt (BRK) is also available. Interrupt
source classification is shown in Table 14-1.
14.2 Interrupt control register
I flag of PSW is a interrupt mask enable flag. When I flag
= "0", all interrupts become disable. When I flag = "1", in-
terrupts can be selectively enabled and disabled by con-
tents of corresponding Interrupt Enable Register. When
interrupt is occured, interrupt request flag is set, and Inter-
rupt request is detected at the edge of interrupt signal. The
accepted interrupt request flag is automatically cleared
during interrupt cycle process. The interrupt request flag
maintains "1" until the interrupt is accepted or is cleared in
program. In reset state, interrupt request flag register
(IRQH, IRQL) is cleared to "0". It is possible to read the
state of interrupt register and to mainpulate the contents of
register and to generate interrupt. (Refer to software inter-
rupt)
Reset/Interrupt
Symbol
Priority
Hardware Reset
RESET
-
Key Scan
KSCNR
1
External Interrupt1
INT1R
2
External Interrupt2
INT2R
3
Timer0
T0R
4
Timer1
T1R
5
Timer2
T2R
6
Watch Dog Timer
WDTR
7
Basic Interval Timer
BITR
8
BRK Instruction
BRK
-
Table 14-1 Interrupt Source
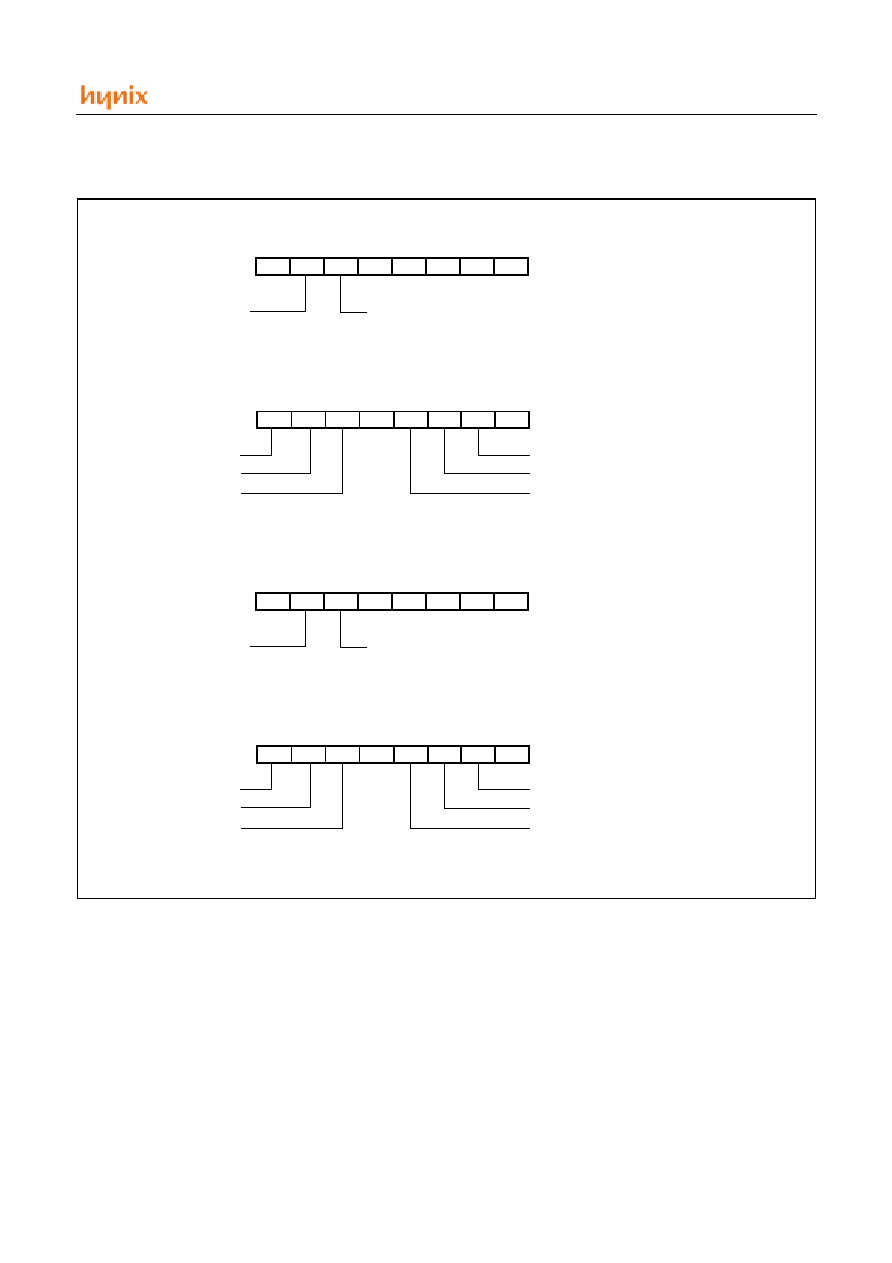
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
49
14.3 Interrupt accept mode
The interrupt priority order is determined by bit (IM1,
IM0) of IMOD register. The condition allow for accepting
interrupt is set state of the interrupt mask enable flag and
the interrupt enable bit must be "1". In Reset state, these
IP3 - IP0 registers become all "0".
.
Figure 14-2 Interrupt Enable & Request Flag
0: Disable
1: Enable
VALUE
R/W
INITIAL VALUE: 000- 000-
B
ADDRESS: 0CE
H
IENH
INT1E
MSB
LSB
T0E
T1E
INT2E
R/W
External interrupt 1
INITIAL VALUE: -00- ----
B
ADDRESS: 0CC
H
IENL
MSB
LSB
Timer1
R/W
R/W
R/W
R/W
Basic Interval Timer
Watchdog timer
External interrupt 2
Key scan
WDTE
R/W
R/W
-
-
-
-
-
BITE
-
-
-
KSCNE
T2E
Timer2
Timer0
R/W
INITIAL VALUE: 000- 000-
B
ADDRESS: 0CF
H
IRQH
INT1R
MSB
LSB
T0R
T1R
INT2R
R/W
External interrupt 1
INITIAL VALUE: -00- ----
B
ADDRESS: 0CD
H
IRQL
MSB
LSB
Timer1
R/W
R/W
R/W
R/W
Basic Interval Timer
Watchdog timer
External interrupt 2
Key scan
WDTR
R/W
R/W
-
-
-
-
-
BITR
-
-
-
KSCNR
T2R
Timer2
Timer0
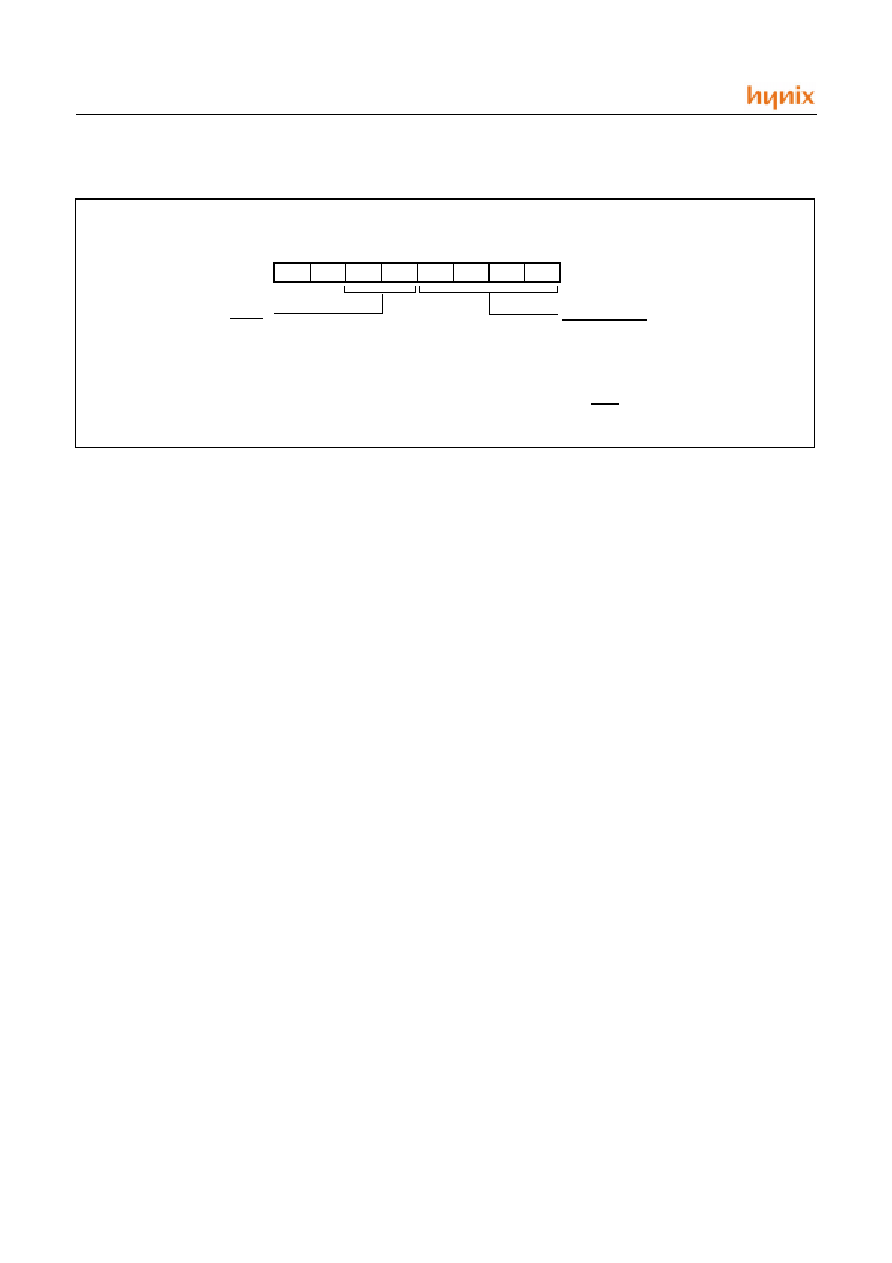
HMS81004E/08E/16E/24E/32E
50
JUNE 2001 Ver 1.00
14.4 Interrupt Sequence
An interrupt request is held until the interrupt is accepted or the
interrupt latch is cleared to "0" by a reset or an instruction. Inter-
rupt acceptance sequence requires 8
f
XIN
after the completion of
the current instruction execution. The interrupt service task is ter-
minated upon execution of an interrupt return instruction [RETI].
Interrupt acceptance
1. The interrupt master enable flag (I-flag) is cleared to
"0" to temporarily disable the acceptance of any follow-
ing maskable interrupts. When a non-maskable inter-
rupt is accepted, the acceptance of any following
interrupts is temporarily disabled.
2. Interrupt request flag for the interrupt source accepted is
cleared to "0".
3. The contents of the program counter (return address)
and the program status word are saved (pushed) onto the
stack area. The stack pointer decreases 3 times.
4. The entry address of the interrupt service program is
read from the vector table address and the entry address
is loaded to the program counter.
5. The instruction stored at the entry address of the inter-
rupt service program is executed.
l
Figure 14-3 Interrupt Accept Mode & Selection by IP3~IP0
BT C L
7
6
5
4
3
2
1
0
IM 1
INITIAL VALUE: --00_0000
B
ADDRESS: 0CA
H
IMOD
IP1
IP0
R/W
R/W
R/W
R/W
R/W
R/W
IM 0
Interrupt mode register
Selection interrupt
00: Fixed by hardware
01: Changeable by IP3~IP0
Priority
R/W
R/W
-
-
0001: KSCNR
0010: INT1R
0011: INT2R
0101: T0R
0110: T1R
0111: T2R
1010: WDTR
1011: BITR
IP 2
IP 3
1x: Interrupt is inhibited
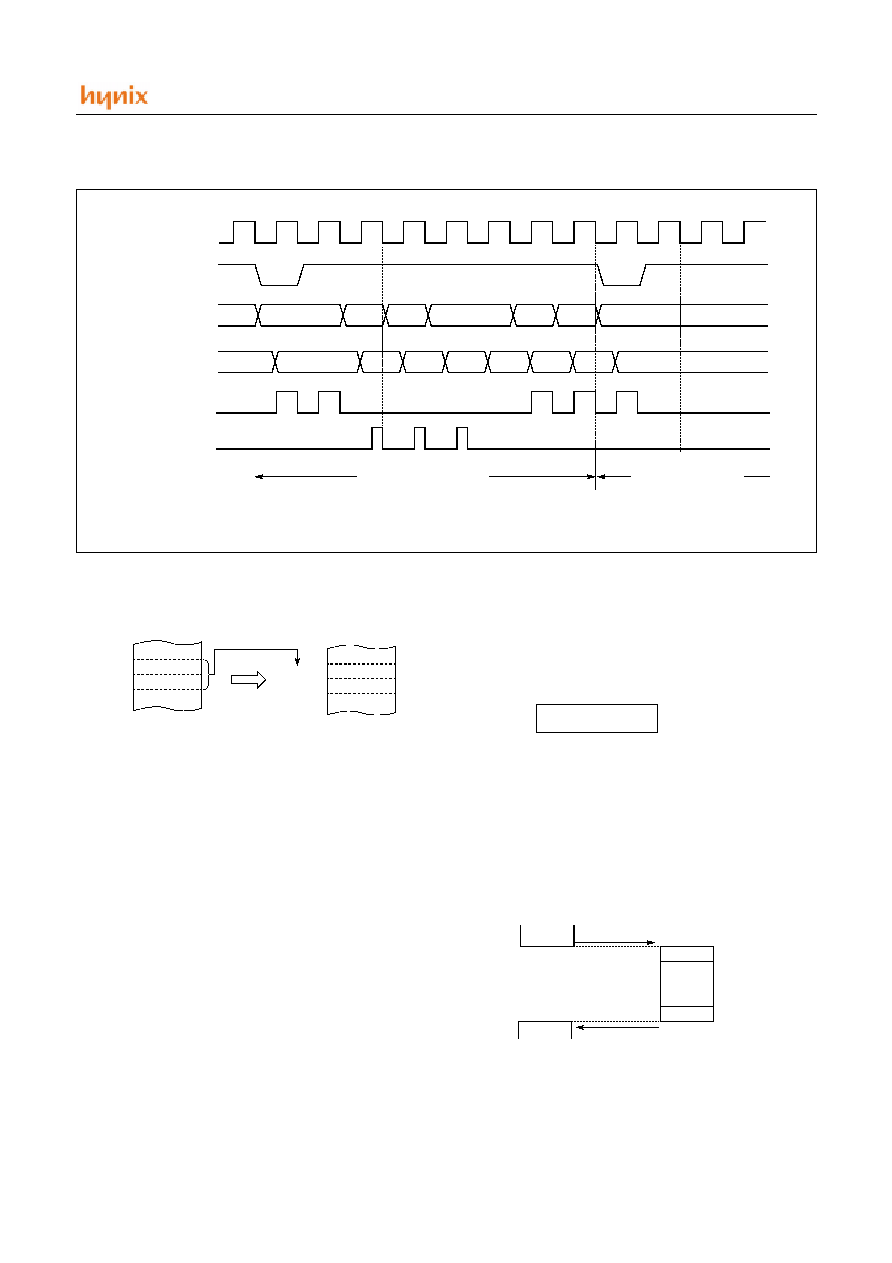
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
51
Figure 14-4 Timing chart of Interrupt Acceptance and Interrupt Return Instruction
A interrupt request is not accepted until the I-flag is set to "1"
even if a requested interrupt has higher priority than that of the
current interrupt being serviced.
When nested interrupt service is required, the I-flag should be set
to "1" by "EI" instruction in the interrupt service program. In this
case, acceptable interrupt sources are selectively enabled by the
individual interrupt enable flags.
Saving/Restoring General-purpose Register
During interrupt acceptance processing, the program counter and
the program status word are automatically saved on the stack, but
accumulator and other registers are not saved itself. These regis-
ters are saved by the software if necessary. Also, when multiple
interrupt services are nested, it is necessary to avoid using the
same data memory area for saving registers.
The following method is used to save/restore the general-purpose
registers.
Example: Register save using push and pop instructions
General-purpose register save/restore using push and pop instruc-
tions;
V.L.
System clock
Address Bus
PC
SP
SP-1
SP-2
V.H.
New PC
V.L.
Data Bus
Not used
PCH
PCL
PSW
ADL
OP code
ADH
Instruction Fetch
Internal Read
Internal Write
Interrupt Processing Step
Interrupt Service Task
V.L. and V.H. are vector addresses.
ADL and ADH are start addresses of interrupt service routine as vector contents.
External Interrupt1
012
H
0E3
H
0FFF8
H
0FFF9
H
0E
H
2E
H
0E312
H
0E313
H
Entry Address
Correspondence between vector table address for Exteranl Interrupt1
and the entry address of the interrupt service program.
Vector Table Address
INTxx:
PUSH
A
PUSH
X
PUSH
Y
;SAVE ACC.
;SAVE X REG.
;SAVE Y REG.
interrupt processing
POP
Y
POP
X
POP
A
RETI
;RESTORE Y REG.
;RESTORE X REG.
;RESTORE ACC.
;RETURN
main task
interrupt
service task
saving
registers
restoring
registers
acceptance of
interrupt
interrupt return

HMS81004E/08E/16E/24E/32E
52
JUNE 2001 Ver 1.00
14.5 BRK Interrupt
Software interrupt can be invoked by BRK instruction, which has
the lowest priority order.
Interrupt vector address of BRK is shared with the vector of
TCALL 0 (Refer to Program Memory Section). When BRK inter-
rupt is generated, B-flag of PSW is set to distinguish BRK from
TCALL 0.
Each processing step is determined by B-flag as shown in Figure
14-5
Figure 14-5 Execution of BRK/TCALL0
14.6 Multi Interrupt
If two requests of different priority levels are received simulta-
neously, the request of higher priority level is serviced. If re-
quest s of the i nt err upt are recei ved at t he same ti me
simultaneously, an internal polling sequence determines by hard-
ware which request is serviced.
However, multiple processing through software for special fea-
tures is possible. Generally when an interrupt is accepted, the I-
flag is cleared to disable any further interrupt. But as user sets I-
flag in interrupt routine, some further interrupt can be serviced
even if certain interrupt is in progress.
Example: During Timer1 interrupt is in progress, INT1 interrupt
serviced without any suspend.
TIMER1:
PUSH
A
PUSH
X
PUSH
Y
LDM
IENH,#40H
;
Enable INT1 only
LDM
IENL,#00H
;
Disable other
EI
;
Enable Interrupt
:
:
:
:
LDM
IENH,#0FFH
;
Enable all interrupts
LDM
IENL,#0FFH
POP
Y
POP
X
POP
A
RETI
Figure 14-6 Execution of Multi Interrupt
14.7 External Interrupt
The external interrupt on INT1 and INT2 pins are edge triggered
depending on the edge selection register IEDS (address 0D8
H
) as
shown in Figure14-7.
B-FLAG
BRK
INTERRUPT
ROUTINE
RETI
TCALL0
ROUTINE
RET
BRK or
TCALL0
=0
=1
enable INT1
TIMER 1
service
INT1
service
Main Program
service
Occur
TIMER1 interrupt
Occur
INT1
EI
disable other
enable INT1
enable other
In this example, the INT1 interrupt can be serviced without any
pending, even TIMER1 is in progress.
Because of re-setting the interrupt enable registers IENH,IENL
and master enable "EI" in the TIMER1 routine.
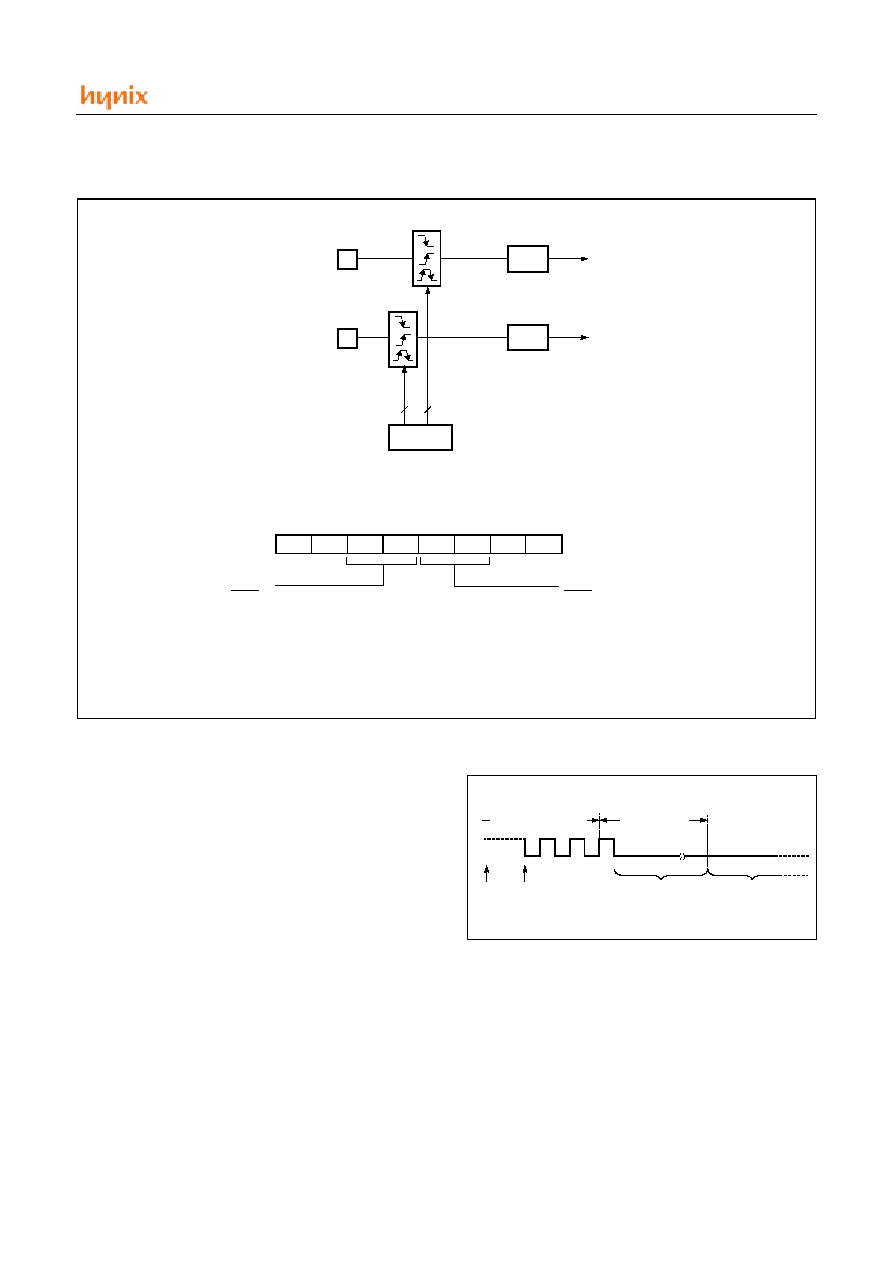
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
53
Response Time
The INT1 ~ INT2 edge are latched into IFINT1 ~ IFINT2 at every
machine cycle. The values are not actually polled by the circuitry
until the next machine cycle. If a request is active and conditions
are right for it to be acknowledged, a hardware subroutine call to
the requested service routine will be the next instruction to be ex-
ecuted. The DIV itself takes twelve cycles. Thus, a minimum of
twelve complete machine cycles elapse between activation of an
external interrupt request and the beginning of execution of the
first instruction of the service routine.
Figure 14-8 shows interrupt response timings.
Figure 14-8 Interrupt Response Timing Diagram
14.8 Key Scan Input Processing
Key Scan Interrupt is generated by detecting low or high
Input from each Input pin (R0, R1) is one of the sources
which release standby (SLEEP, STOP) mode. Key Scan
ports are all 16bit which are controlled by Standby Mode
Release Register (SMRR0, SMRR1). Key Input is consid-
ered as Interrupt, therefore, KSCNE bit of IEHN should be
set for correct interrupt executing, SLEEP mode and STOP
mode, the rest of executing is the same as that of external
Interrupt. Each SMRR Register bit is allowed for each port
(for Bit= "0", no Key Input, for Bit= "1", Key Input avail-
able). At reset, SMRR becomes "00h". So, there is no Key
Input source.
Figure 14-7 External Interrupt Block Diagram
IFINT1
INT1 pin
INT1 INTERRUPT
IFINT2
INT2 pin
INT2 INTERRUPT
IEDS
[0CBH]
Edge selection
Register
2
2
BT C L
7
6
5
4
3
2
1
0
IED 2H
INITIAL VALUE: 0000_0000
B
ADDRESS: 0CB
H
IEDS
-
W
Ext. Int. Edge Selection reg.
01: Falling Edge Selection
10: Rising Edge Selection
IED2*
-
-
11: Both Edsg Selection
-
W
W
W
IED 2L IE D 1H
IED 1L
01: Falling Edge Selection
10: Rising Edge Selection
IED1*
11: Both Edsg Selection
Interrupt
goes
active
Interrupt
latched
Interrupt
processing
Interrupt
routine
8 f
XIN
period
max. 12 f
XIN
period

HMS81004E/08E/16E/24E/32E
54
JUNE 2001 Ver 1.00
Standby release level control register (SRLC) can select
the key scan input level "L" or "H" for standby release by
each bit pin (R0, R1). Standby release level control register
(SRLC) is write-only register and initialized as "00h" in re-
set state.
Figure 14-9 Block Diagram of Key Scan Block
BT C L
7
6
5
4
3
2
1
0
INITIAL VALUE: 00
H
ADDRESS: 0DC
H
SMRR0
W
KR 07
R 03
R 02
R 0 1
R 04
R 05
R 06
R 07
R 0 0
R0 PORT LOGIC
R 13
R 12
R 1 1
R 14
R 15
R 16
R 17
R 1 0
SMRR0
SRLC0
R1 PORT LOGIC
SMRR1
SRLC1
Internal
Key Scan
Input
W
W
W
W
W
W
W
KR 06
KR 05
K R 04
KR 03
KR 02
K R 01
K R 00
KR 0*
1: Select
0: N o S elect
BT C L
7
6
5
4
3
2
1
0
INITIAL VALUE: 00
H
ADDRESS: 0DD
H
SMRR1
W
KR 17
W
W
W
W
W
W
W
KR 16
KR 15
K R 14
KR 13
KR 12
K R 11
K R 10
KR 1*
1: Select
0: N o S elect
BT C L
7
6
5
4
3
2
1
0
INITIAL VALUE: 00
H
ADDRESS: 0F6
H
SRLC0
W
KLR 07
W
W
W
W
W
W
W
K LR 06 KLR 05
KLR 04 KLR 03 K LR 02 K LR01 K LR 00
KLR 0*
1: H igh
0: Low
BT C L
7
6
5
4
3
2
1
0
INITIAL VALUE: 00
H
ADDRESS: 0F7
H
SRLC1
W
K LR 17
W
W
W
W
W
W
W
K LR 16 K LR 15
KLR 14 K LR 13 K LR 12 KLR 11 KLR10
K LR 1*
1: H igh
0: Low

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
55
15. STANDBY FUNCTION
15.1 Sleep Mode
SLEEP mode can be entered by setting the bit of SLEEP
mode register (SLPM). In the mode, CPU clock stops but
oscillator keeps running. B.I.T and a part of peripheral
hardware execute, but prescalerÌs output which provide
clock to peripherals can be stopped by program. (Except,
PS10 can't stopped.) In SLEEP mode, more consuming
power can be saved by not using other peripheral hardware
except for B.I.T. By setting ENPCK (peripheral clock con-
trol bit) of CKCTLR (clock control register) to "0", periph-
eral hardware halted, and SLEEP mode is entered. To
release SLEEP mode by BITR (basic interval timer inter-
rupt), bit10 of prescaler should be selected as B.I.T input
clock before entering SLEEP mode. "NOP" instruction
should be follows setting of SLEEP mode for rising pre-
charge time of data bus line.
(ex) setting of SLEEP mode : set the bit of SLEEP
; mode register (SLPM)
NOP : NOP instruction
15.2 STOP MODE
STOP mode can be entered by STOP instruction during
program. In STOP mode, oscillator is stopped to make all
clocks stop, which leads to less power consumption. All
registers and RAM data are preserved. "NOP" instruction
should be follows STOP instruction for rising precharge
time of Data Bus line.
(ex) STOP : STOP instruction execution
NOP : NOP instruction
Sleep Mode Control Register (W)
SLPM
ADDRESS : 0F0
H
INITIAL VALUE : -------0b
-
SLPM0
1: sleep mode
Clock Control Register (W)
CKCTLR
ADDRESS : 0C7
H
INITIAL VALUE : --110111b
0
1
2
3
4
5
6
7
ENPCK 0: Stopped
1: Provided
-
-
-
-
-
-
0: Sleep mode release
0
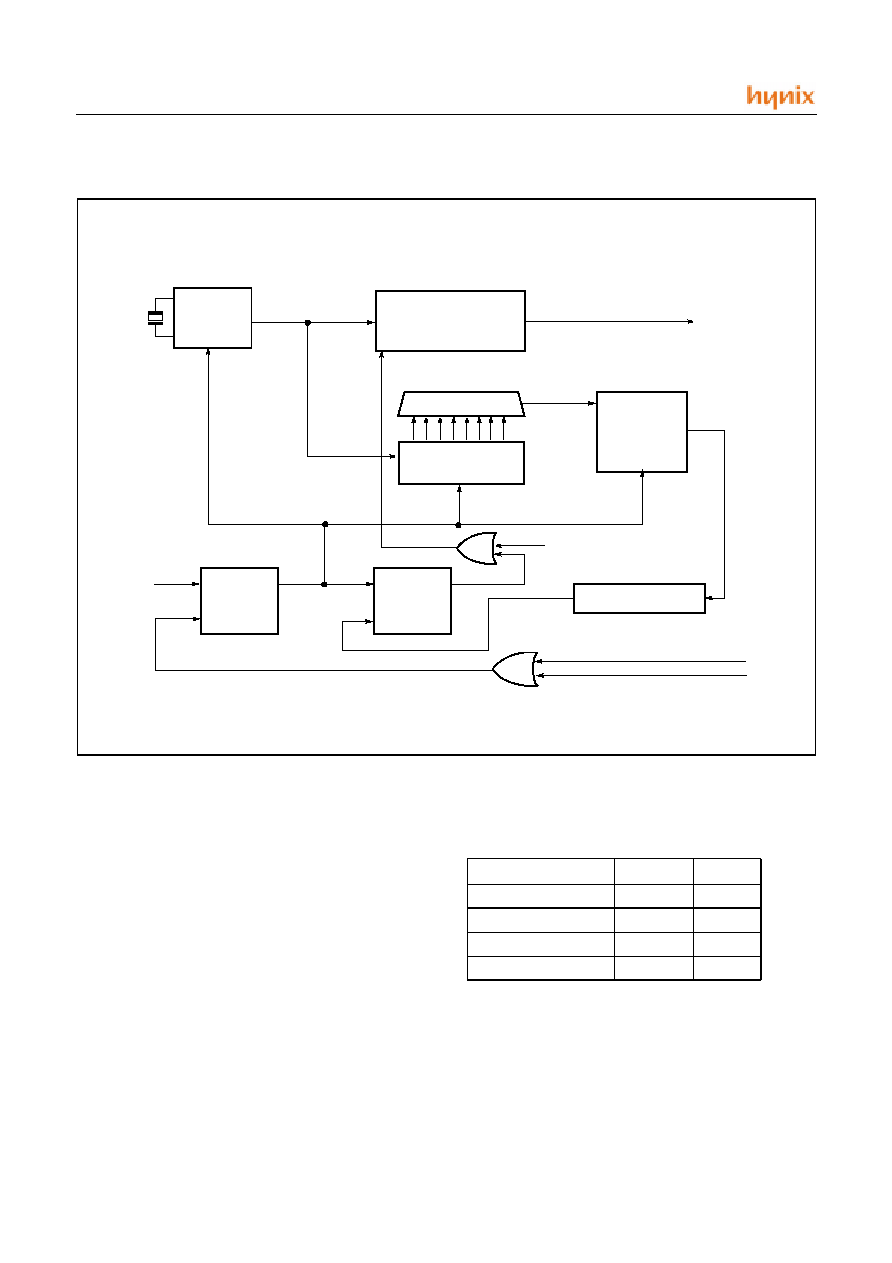
HMS81004E/08E/16E/24E/32E
56
JUNE 2001 Ver 1.00
15.3 STANDBY MODE RELEASE
Release of STANDBY mode is executed by RESET input
and Interrupt signal. Register value is defined when Reset.
When there is a release signal of STOP mode (Interrupt,
RESET input), the instruction execution starts after stabi-
lization oscillation time is set by value of BTS2 ~ BTS0
and set ENPCK to "1".
Figure 15-1 Block Diagram of Standby Circuit
OSC
Circuit
Clock Pulse
Generator
CPU Clock
Release Signal from Interrupt
RESETB
STOP
S
R
Q
S
R
Q
Control Signal
Overflow Detection
b
it7
Prescaler
Clear
MUX
Basic
Interval
Timer
Clear
Release Signal
SLEEP
STOP
RESETB
O
O
KSCN(Key Input)
O
O
INT1,INT2
O
O
B.I.T.
O
Table 15-1 Release Signal of Standby Mode

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
57
Release Factor
Release Method
RESETB
By RESETB Pin=Low level, Standby mode is releas and system is initialized
KSCN(Key Input)
Standby mode is released by low input of selected pin by key scan Input(SMRR0,SMRR1).
In case of interrupt mask enable flag= "0", program executes just after standby instruction,
if flag= "1" enters each interrupt service routine.
INT1,INT2
When external interrupt (INT1,INT2)
enable flag is "1", standby mode is released at the
rising edge of each terminal. When standby mode is released at interrupt. Mask Enable
flag= "0", program executes from the next instruction of standby instruction. When "1",
enters each interrupt service routine.
Basic Interval
Timer(IFBIT)
When B.I.T. is executed only by bit10 of prescaler(PS10), SLEEP mode can be released.
Interrupt release SLEEP mode , when BIT interrupt enable flag is "1". When standby mode
is released at interrupt. Mask enable flag= "0", program executes from the next instruction
of SLEEP instruction. When "1", enters each interrupt service routine.
Table 15-2
Figure 15-2 Block Diagram of Standby Circuit
[SLEEP MODE]
Xin
SLEEP command
SLEEP mode
release by interrupt
RESET
Longer than 2 machine cycle
[STOP MODE]
Xin
STOP mode
release by interrupt
RESET
Stable OSC.time
Program setting time by CKCTLR
Longer than stabe OSC. Time
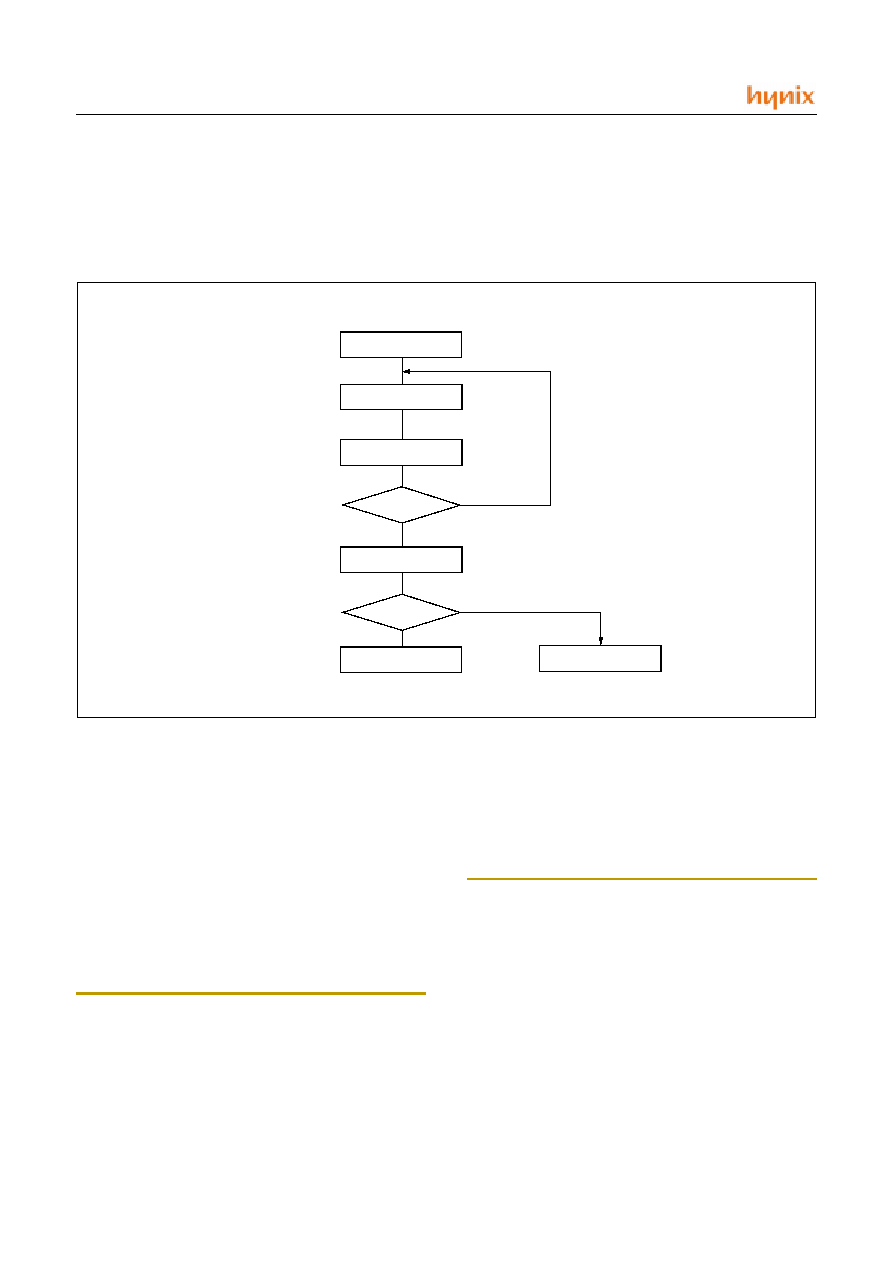
HMS81004E/08E/16E/24E/32E
58
JUNE 2001 Ver 1.00
15.4 RELEASE OPERATION OF STANDBY MODE
After standby mode is released, the operation begins ac-
cording to content of related interrupt register just before
standby mode start (Figure 15-3).
(1) Interrupt Enable Flag(I) of PSW = "0"
Release by only interrupt which interrupt enable flag =
"1", and starts to execute from next to standby instruction
(SLEEP or STOP).
(2) Interrupt Enable Flag(I) of PSW = "1"
Released by only interrupt which each interrupt enable flag
= "1", and jump to the relevant interrupt service routine.
Note: When STOP instruction is used, B.I.T should guar-
antee the stabilization oscillation time. Thus, just before en-
tering STOP mode, clock of bit10 (PS10) of prescaler is
selected or peripheral hardware clock control bit (ENPCK)
to "1", Therefore the clock necessary for stabilization oscil-
lation time should be input into B.I.T. otherwise, standby
mode is released by reset signal. In case of interrupt re-
quest flag and interrupt enable flag are both "1", standby
mode is not entered.
.
Figure 15-3 Standby Mode Release Flow
STOP Command
Interrupt Request GEN.
Int. enable reg.
0
1
Standby Mode
PSW
I Flag
Standby Mode Release
Interrupt Service Routine
Standby Next Command
Execution
0
1
HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
59
Internal circuit
SLEEP mode
STOP mode
Oscillator
Active
Stop
Internal CPU
Stop
Stop
Register
Retained
Retained
RAM
Retained
Retained
I/O port
Retained
Retained
Prescaler
Active
Retained
Basic Interval Timer
PS10 selected:Active
Others: Stop
Stop
Watch-dog Timer
Stop
Stop
Timer
Stop
Stop
Address Bus,Data Bus
Retained
Retained
Table 15-3 Operation State in Standby Mode

HMS81004E/08E/16E/24E/32E
60
JUNE 2001 Ver 1.00
16. RESET FUNCTION
16.1 EXTERNAL RESET
The RESET pin should be held at low for at least 2machine
cycles with the power supply voltage within the operating
voltage range and must be connected 0.1uF capacitor for
stable system initialization. The RESET pin contains a
Schmitt trigger with an internal pull-up resistor.
16.2 POWER ON RESET
Power On Reset circuit automatically detects the rise of
power voltage (the rising time should be within 50ms) the
power voltage reaches a certain level, RESET terminal is
maintained at "L" Level until a crystal ceramic oscillator
oscillates stably. After power applies and starting of oscil-
lation, this reset state is maintained for about oscillation
cycle of 219 (about 65.5ms : at 4MHz).The execution of
built-in Power On Reset circuit is as follows :
(1) Latch the pulse from Power On Detection Pulse Gener-
ator circuit, and reset Prescaler, B.I.T and B.I.T Overflow
detection circuit.
(2) Once B.I.T Overflow detection circuit is reset. Then,
Prescaler starts to count.
(3) Prescaler output is inputted into B.I.T and PS10 of
Prescaler output is automatically selected. If overflow of
B.I.T is detected, Overflow detection circuit is set.
4) Reset circuit generates maximum period of reset pulse
from Prescaler and B.I.T
Figure 16-1 RESET Pin connection
RESET
GND
0.1uF capacitor

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
61
Note: When Power On Reset, oscillator stabilization time
doesn`t include OSC. Start time.
Figure 16-2 Block Diagram of Power On Reset Circuit
RESET
GND
0.1uF
GND
VDD
Internal Reset
Power on
Detect Pulse
Generator
OSC
Circuit
Prescaler
Basic
Interval
Timer
B.I.T.
Overflow
Detction
Circuit
Clear
Clear
Clear
PS10
MSB
Figure 16-3 Oscillator stabiliaztion diagram
VDD
OSC. Start Time
Prescaler Count Start
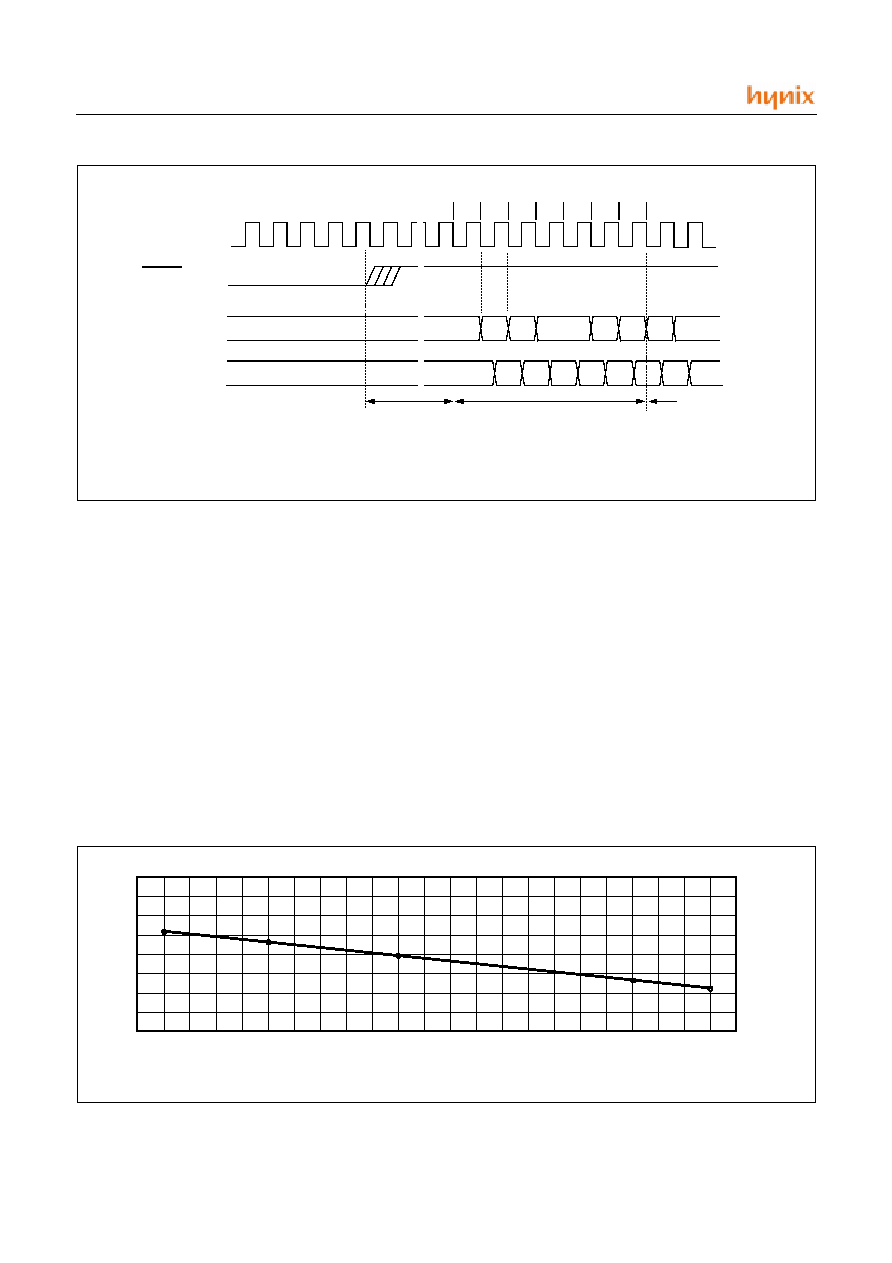
HMS81004E/08E/16E/24E/32E
62
JUNE 2001 Ver 1.00
16.3 Low Voltage Detection Mode
(1) Low voltage detection condition
An on board voltage comparator checks that VDD is at the
required level to ensure correct operation of the device. If
VDD is below a certain level, Low voltage detector forces
the device into low voltage detection mode.
(2) Low Voltage Detection Mode
There is no power consumption except stop current, stop
mode release function is disabled. All I/O port is config-
ured as input mode and Data memory is retained until volt-
age through external capacitor is worn out. In this mode,
all port can be selected with Pull-up resistor by Mask op-
tion. If there is no information on the Mask option sheet
,the default pull up option (all port connect to pull-up resis-
tor ) is selected.
(3) Release of Low Voltage Detection Mode
Reset signal result from new battery(normally 3V) wakes
the low voltage detection mode and come into normal reset
state. It depends on user whether to execute RAM clear
routine or not
Figure 16-4 Timing Diagram of Reset
MAIN PROGRAM
Oscillator
(X
IN
pin)
?
?
FFFE FFFF
Stabilization Time
RESET
ADDRESS
DATA
1
2
3
4
5
6
7
?
?
Start
?
?
?
FE
?
ADL
ADH
OP
BUS
BUS
RESET Process Step
~~
~~
~~
~~
~~
~~
ADL and ADH are start addresses of interrupt service routine as vector contents.
Figure 16-5 Low Voltage vs Temperature
1.55
1.60
1.65
1.70
1.75
1.80
1.85
-25 -20 -15 -10 -5 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90
LVD(V)
Temperature (
∞
C)

HMS81004E/08E/16E/24E/32E
JUNE 2001 Ver 1.00
63
(4) SRAM BACK-UP after Low Voltage Detection.
Figure 16-6 Oscillator stabiliaztion diagram
Interrupt
disable
Stop release
disable
All I/O port
input Mode
Remout port
Low Level
OSC
STOP
All I/O port pull-up on
Mask Option
SRAM Data
retention until Vret
Table 16-1 The operation after Low Voltage detection
VDD
2V(Min.)
1.7V(typ.20
∞
C
)
0.7V(Vret)
0V
3V
about hours depend on Vdd-GND Capacitor
SRAM Data Backup
User removes
batteries
User replaces
batteries
Time
Low Voltage detetion point
Power on Reset
(SRAM retention)
Power on Reset
(SRAM unstable)

HMS81004E/08E/16E/24E/32E
64
JUNE 2001 Ver 1.00
(5) S/W flow chart example after Reset using SRAM Back-up
Figure 16-7 S/W flow chart example after Reset using SRAM Back-up
RESET
Check the SRAM value
Stack Pointer initialize
SRAM DATA
VALID?
Use Saved SRAM value
Clear all Ram area
N
Y
(RAM Pattern, Checksum)
Main routine
APPENDIX

A. MASK ORDER SHEET
1. Customer Information
Company Name
2. Device Information
4. Marking Specification
5. Delivery Schedule
Customer Sample
Date
YYYY
MM
DD
Risk Order
YYYY
MM
DD
Quantity
Hynix Confirmation
Application
Order Date
Tel:
Fax:
Package
20SOP
20PDIP
6. ROM Code Verification
Verification D ate:
YYYY
MM
DD
Approval Date:
YYYY
MM
DD
P lease confirm our verification data.
I agree w ith your verification data and confirm
you to m ake m ask set.
Check Sum:
Tel:
Fax:
Name &
Signature:
Tel:
Fax:
Name &
Signature:
Mask Data
File Name: ( .OTP)
(Please check mark into )
pcs
pcs
Check Sum ( @27c256)
Customer should write inside thick line box.
This box is written after "6.Verification".
28SOP
28SKDIP
24SOP
24SKDIP
YYWW
KOREA
Customer's logo
Customer logo is not required.
YYWW
KOREA
HMS810
Customer's part number
If the customer logo must be used in the special mark, please submit a clean original of the logo.
04/08/16/24/32
Name&Signature:
JUNE 2001
MASK ORDER & VERIFICATION SHEET
HMS810
E -UE
E -UE
Lot Number
Hynix ROM Code
Number
YYYY
MM
DD
28PIN DIE
HMS810
E -UE
3. Inclusion of pull-up resistor in Low Volatage Detection mode
Port R00 R01 R02 R03 R04 R05 R06 R07
R10 R11 R12 R13 R14 R15 R16 R17
R20 R21 R22 R23 R24
Y/N
*2
*2
*2
*2
*1
*1
*1
*1
*1 : is not avilable for 20PIN. So default option is pull-up on.
*2 : is not avilable for 20PIN & 24PIN. So default option is pull-up on.
APPENDIX
JUNE 2001 Ver 1.00
lxxi
B. INSTRUCTION
B.1 Terminology List
Terminology
Description
A
Accumulator
X
X - register
Y
Y - register
PSW
Program Status Word
#imm
8-bit Immediate data
dp
Direct Page Offset Address
!abs
Absolute Address
[ ]
Indirect expression
{ }
Register Indirect expression
{ }+
Register Indirect expression, after that, Register auto-increment
.bit
Bit Position
A.bit
Bit Position of Accumulator
dp.bit
Bit Position of Direct Page Memory
M.bit
Bit Position of Memory Data (000
H
~0FFF
H
)
rel
Relative Addressing Data
upage
U-page (0FF00
H
~0FFFF
H
) Offset Address
n
Table CALL Number (0~15)
+
Addition
x
Upper Nibble Expression in Opcode
y
Upper Nibble Expression in Opcode
-
Subtraction
◊
Multiplication
/
Division
( )
Contents Expression
AND
OR
Exclusive OR
~
NOT
Assignment / Transfer / Shift Left
Shift Right
Exchange
=
Equal
Not Equal
0
Bit Position
1
Bit Position

APPENDIX
lxxii
JUNE 2001 Ver 1.00
B.2 Instruction Map
LOW
HIGH
00000
00
00001
01
00010
02
00011
03
00100
04
00101
05
00110
06
00111
07
01000
08
01001
09
01010
0A
01011
0B
01100
0C
01101
0D
01110
0E
01111
0F
000
-
SET1
dp.bit
BBS
A.bit,rel
BBS
dp.bit,rel
ADC
#imm
ADC
dp
ADC
dp+X
ADC
!abs
ASL
A
ASL
dp
TCALL
0
SETA1
.bit
BIT
dp
POP
A
PUSH
A
BRK
001
CLRC
SBC
#imm
SBC
dp
SBC
dp+X
SBC
!abs
ROL
A
ROL
dp
TCALL
2
CLRA1
.bit
COM
dp
POP
X
PUSH
X
BRA
rel
010
CLRG
CMP
#imm
CMP
dp
CMP
dp+X
CMP
!abs
LSR
A
LSR
dp
TCALL
4
NOT1
M.bit
TST
dp
POP
Y
PUSH
Y
PCALL
Upage
011
DI
OR
#imm
OR
dp
OR
dp+X
OR
!abs
ROR
A
ROR
dp
TCALL
6
OR1
OR1B
CMPX
dp
POP
PSW
PUSH
PSW
RET
100
CLRV
AND
#imm
AND
dp
AND
dp+X
AND
!abs
INC
A
INC
dp
TCALL
8
AND1
AND1B
CMPY
dp
CBNE
dp+X
TXSP
INC
X
101
SETC
EOR
#imm
EOR
dp
EOR
dp+X
EOR
!abs
DEC
A
DEC
dp
TCALL
10
EOR1
EOR1B
DBNE
dp
XMA
dp+X
TSPX
DEC
X
110
SETG
LDA
#imm
LDA
dp
LDA
dp+X
LDA
!abs
TXA
LDY
dp
TCALL
12
LDC
LDCB
LDX
dp
LDX
dp+Y
XCN
DAS
111
EI
LDM
dp,#imm
STA
dp
STA
dp+X
STA
!abs
TAX
STY
dp
TCALL
14
STC
M.bit
STX
dp
STX
dp+Y
XAX
STOP
LOW
HIGH
10000
10
10001
11
10010
12
10011
13
10100
14
10101
15
10110
16
10111
17
11000
18
11001
19
11010
1A
11011
1B
11100
1C
11101
1D
11110
1E
11111
1F
000
BPL
rel
CLR1
dp.bit
BBC
A.bit,rel
BBC
dp.bit,rel
ADC
{X}
ADC
!abs+Y
ADC
[dp+X]
ADC
[dp]+Y
ASL
!abs
ASL
dp+X
TCALL
1
JMP
!abs
BIT
!abs
ADDW
dp
LDX
#imm
JMP
[!abs]
001
BVC
rel
SBC
{X}
SBC
!abs+Y
SBC
[dp+X]
SBC
[dp]+Y
ROL
!abs
ROL
dp+X
TCALL
3
CALL
!abs
TEST
!abs
SUBW
dp
LDY
#imm
JMP
[dp]
010
BCC
rel
CMP
{X}
CMP
!abs+Y
CMP
[dp+X]
CMP
[dp]+Y
LSR
!abs
LSR
dp+X
TCALL
5
MUL
TCLR1
!abs
CMPW
dp
CMPX
#imm
CALL
[dp]
011
BNE
rel
OR
{X}
OR
!abs+Y
OR
[dp+X]
OR
[dp]+Y
ROR
!abs
ROR
dp+X
TCALL
7
DBNE
Y
CMPX
!abs
LDYA
dp
CMPY
#imm
RETI
100
BMI
rel
AND
{X}
AND
!abs+Y
AND
[dp+X]
AND
[dp]+Y
INC
!abs
INC
dp+X
TCALL
9
DIV
CMPY
!abs
INCW
dp
INC
Y
TAY
101
BVS
rel
EOR
{X}
EOR
!abs+Y
EOR
[dp+X]
EOR
[dp]+Y
DEC
!abs
DEC
dp+X
TCALL
11
XMA
{X}
XMA
dp
DECW
dp
DEC
Y
TYA
110
BCS
rel
LDA
{X}
LDA
!abs+Y
LDA
[dp+X]
LDA
[dp]+Y
LDY
!abs
LDY
dp+X
TCALL
13
LDA
{X}+
LDX
!abs
STYA
dp
XAY
DAA
111
BEQ
rel
STA
{X}
STA
!abs+Y
STA
[dp+X]
STA
[dp]+Y
STY
!abs
STY
dp+X
TCALL
15
STA
{X}+
STX
!abs
CBNE
dp
XYX
NOP
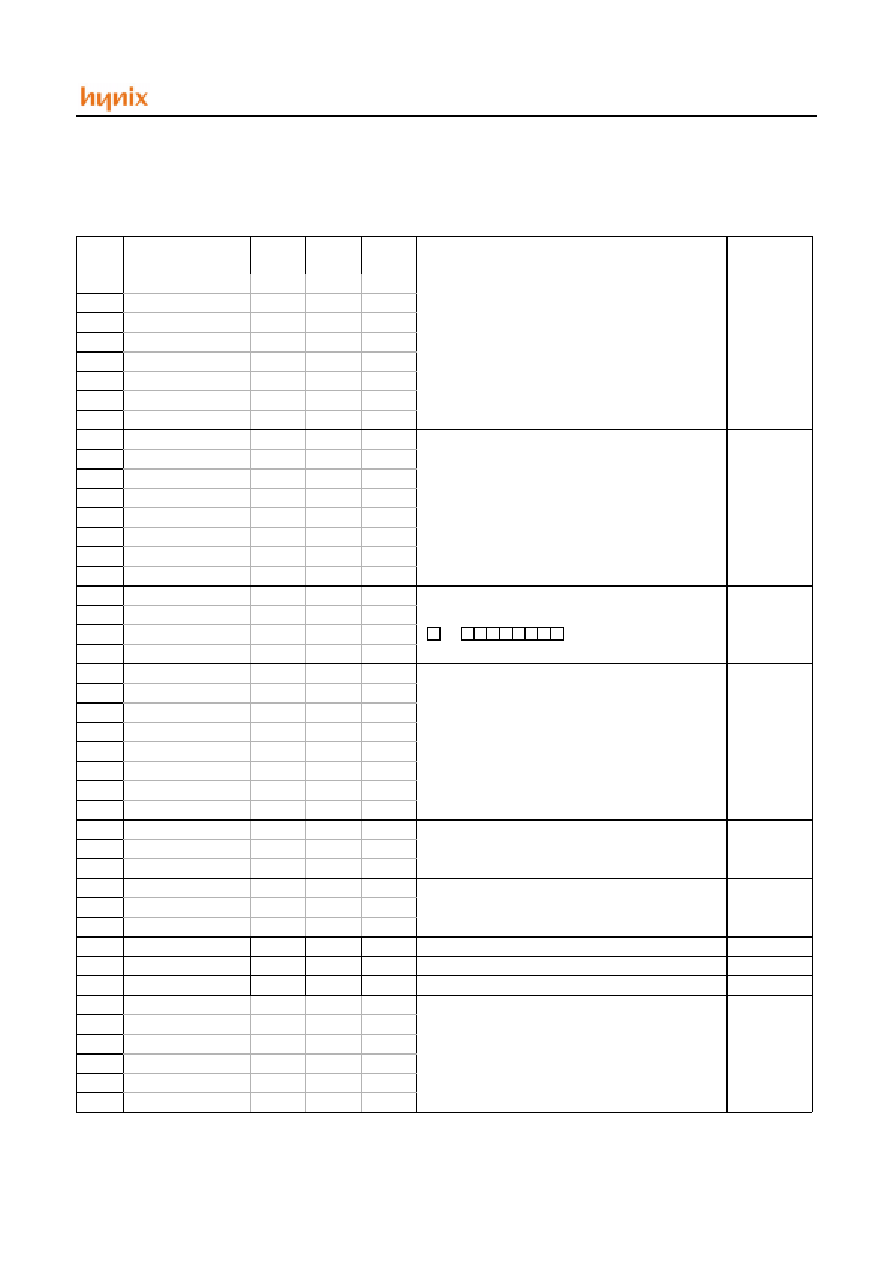
APPENDIX
JUNE 2001 Ver 1.00
lxxiii
B.3 Instruction Set
Arithmetic / Logic Operation
No.
Mnemonic
Op
Code
Byte
No
Cycle
No
Operation
Flag
NVGBHIZC
1
ADC #imm
04
2
2
Add with carry.
2
ADC dp
05
2
3
A
( A ) + ( M ) + C
3
ADC dp + X
06
2
4
4
ADC !abs
07
3
4
NV--H-ZC
5
ADC !abs + Y
15
3
5
6
ADC [ dp + X ]
16
2
6
7
ADC [ dp ] + Y
17
2
6
8
ADC { X }
14
1
3
9
AND #imm
84
2
2
Logical AND
10
AND dp
85
2
3
A
( A )
( M )
11
AND dp + X
86
2
4
12
AND !abs
87
3
4
N-----Z-
13
AND !abs + Y
95
3
5
14
AND [ dp + X ]
96
2
6
15
AND [ dp ] + Y
97
2
6
16
AND { X }
94
1
3
17
ASL A
08
1
2
Arithmetic shift left
18
ASL dp
09
2
4
N-----ZC
19
ASL dp + X
19
2
5
20
ASL !abs
18
3
5
21
CMP #imm
44
2
2
Compare accumulator contents with memory contents
( A ) - ( M )
22
CMP dp
45
2
3
23
CMP dp + X
46
2
4
24
CMP !abs
47
3
4
N-----ZC
25
CMP !abs + Y
55
3
5
26
CMP [ dp + X ]
56
2
6
27
CMP [ dp ] + Y
57
2
6
28
CMP { X }
54
1
3
29
CMPX #imm
5E
2
2
Compare X contents with memory contents
30
CMPX dp
6C
2
3
( X ) - ( M )
N-----ZC
31
CMPX !abs
7C
3
4
32
CMPY #imm
7E
2
2
Compare Y contents with memory contents
33
CMPY dp
8C
2
3
( Y ) - ( M )
N-----ZC
34
CMPY !abs
9C
3
4
35
COM dp
2C
2
4
1'S Complement : ( dp )
~( dp )
N-----Z-
36
DAA
DF
1
3
Decimal adjust for addition
N-----ZC
37
DAS
CF
1
3
Decimal adjust for subtraction
N-----ZC
38
DEC A
A8
1
2
Decrement
N-----Z-
39
DEC dp
A9
2
4
M
( M ) - 1
N-----Z-
40
DEC dp + X
B9
2
5
N-----Z-
41
DEC !abs
B8
3
5
N-----Z-
42
DEC X
AF
1
2
N-----Z-
43
DEC Y
BE
1
2
N-----Z-
7 6 5 4 3 2 1 0
"0"
C

APPENDIX
lxxiv
JUNE 2001 Ver 1.00
44
DIV
9B
1
12
Divide : YA / X Q: A, R: Y
NV--H-Z-
45
EOR #imm
A4
2
2
Exclusive OR
46
EOR dp
A5
2
3
A
( A )
( M )
47
EOR dp + X
A6
2
4
48
EOR !abs
A7
3
4
N-----Z-
49
EOR !abs + Y
B5
3
5
50
EOR [ dp + X ]
B6
2
6
51
EOR [ dp ] + Y
B7
2
6
52
EOR { X }
B4
1
3
53
INC A
88
1
2
Increment
N-----ZC
54
INC dp
89
2
4
M
( M ) + 1
N-----Z-
55
INC dp + X
99
2
5
N-----Z-
56
INC !abs
98
3
5
N-----Z-
57
INC X
8F
1
2
N-----Z-
58
INC Y
9E
1
2
N-----Z-
59
LSR A
48
1
2
Logical shift right
60
LSR dp
49
2
4
N-----ZC
61
LSR dp + X
59
2
5
62
LSR !abs
58
3
5
63
MUL
5B
1
9
Multiply : YA
Y
◊
A
N-----Z-
64
OR #imm
64
2
2
Logical OR
65
OR dp
65
2
3
A
( A )
( M )
66
OR dp + X
66
2
4
67
OR !abs
67
3
4
N-----Z-
68
OR !abs + Y
75
3
5
69
OR [ dp + X ]
76
2
6
70
OR [ dp ] + Y
77
2
6
71
OR { X }
74
1
3
72
ROL A
28
1
2
Rotate left through Carry
73
ROL dp
29
2
4
N-----ZC
74
ROL dp + X
39
2
5
75
ROL !abs
38
3
5
76
ROR A
68
1
2
Rotate right through Carry
77
ROR dp
69
2
4
N-----ZC
78
ROR dp + X
79
2
5
79
ROR !abs
78
3
5
80
SBC #imm
24
2
2
Subtract with Carry
81
SBC dp
25
2
3
A
( A ) - ( M ) - ~( C )
82
SBC dp + X
26
2
4
83
SBC !abs
27
3
4
NV--HZC
84
SBC !abs + Y
35
3
5
85
SBC [ dp + X ]
36
2
6
86
SBC [ dp ] + Y
37
2
6
87
SBC { X }
34
1
3
88
TST dp
4C
2
3
Test memory contents for negative or zero, ( dp ) - 00
H
N-----Z-
89
XCN
CE
1
5
Exchange nibbles within the accumulator
A
7
~A
4
A
3
~A
0
N-----Z-
No.
Mnemonic
Op
Code
Byte
No
Cycle
No
Operation
Flag
NVGBHIZC
7 6 5 4 3 2 1 0
"0"
C
7 6 5 4 3 2 1 0
C
7 6 5 4 3 2 1 0
C
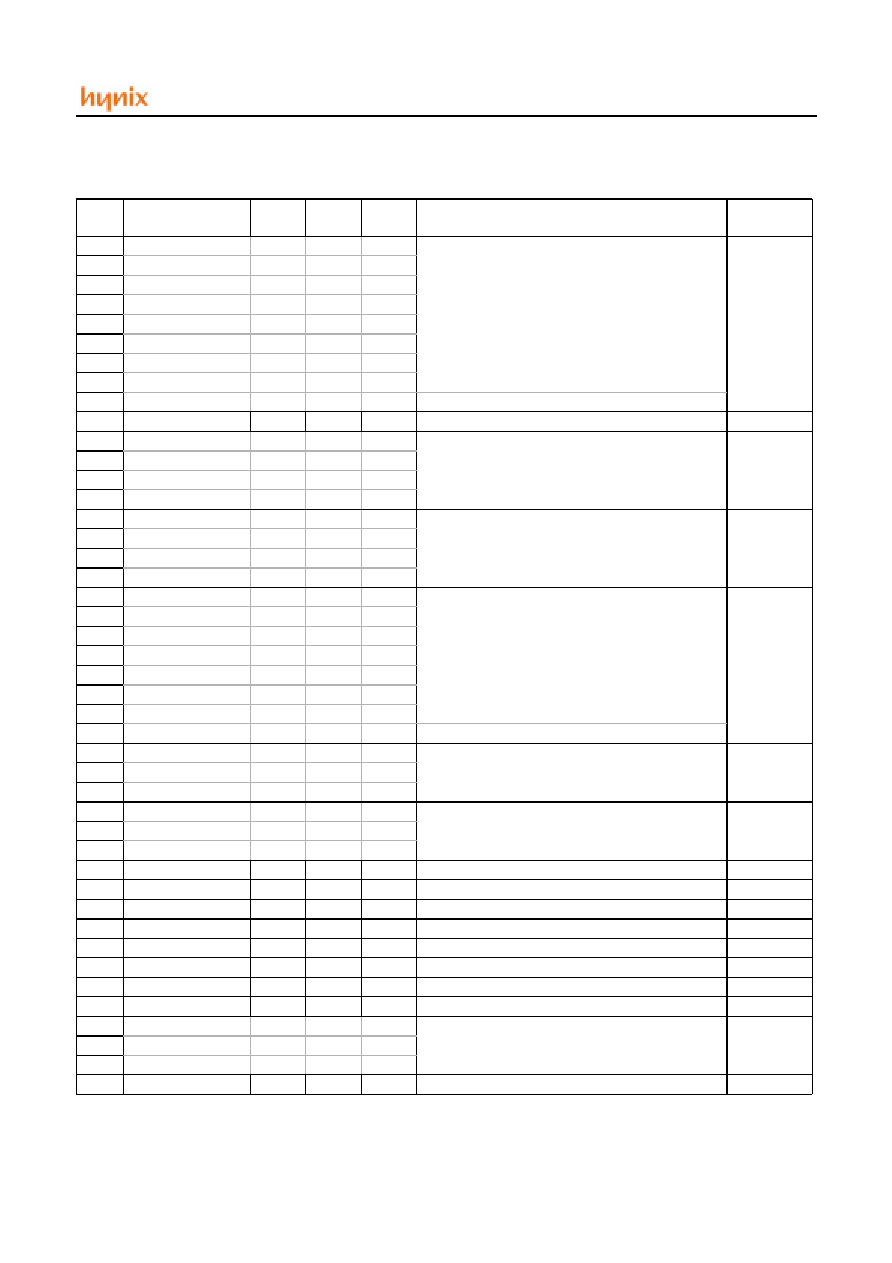
APPENDIX
JUNE 2001 Ver 1.00
lxxv
Register / Memory Operation
No.
Mnemonic
Op
Code
Byte
No
Cycle
No
Operation
Flag
NVGBHIZC
1
LDA #imm
C4
2
2
Load accumulator
2
LDA dp
C5
2
3
A
( M )
3
LDA dp + X
C6
2
4
4
LDA !abs
C7
3
4
5
LDA !abs + Y
D5
3
5
N-----Z-
6
LDA [ dp + X ]
D6
2
6
7
LDA [ dp ] + Y
D7
2
6
8
LDA { X }
D4
1
3
9
LDA { X }+
DB
1
4
X- register auto-increment : A
( M ) , X
X + 1
10
LDM dp,#imm
E4
3
5
Load memory with immediate data : ( M )
imm
--------
11
LDX #imm
1E
2
2
Load X-register
12
LDX dp
CC
2
3
X
( M )
N-----Z-
13
LDX dp + Y
CD
2
4
14
LDX !abs
DC
3
4
15
LDY #imm
3E
2
2
Load Y-register
16
LDY dp
C9
2
3
Y
( M )
N-----Z-
17
LDY dp + X
D9
2
4
18
LDY !abs
D8
3
4
19
STA dp
E5
2
4
Store accumulator contents in memory
20
STA dp + X
E6
2
5
( M )
A
21
STA !abs
E7
3
5
22
STA !abs + Y
F5
3
6
--------
23
STA [ dp + X ]
F6
2
7
24
STA [ dp ] + Y
F7
2
7
25
STA { X }
F4
1
4
26
STA { X }+
FB
1
4
X- register auto-increment : ( M )
A, X
X + 1
27
STX dp
EC
2
4
Store X-register contents in memory
28
STX dp + Y
ED
2
5
( M )
X
--------
29
STX !abs
FC
3
5
30
STY dp
E9
2
4
Store Y-register contents in memory
31
STY dp + X
F9
2
5
( M )
Y
--------
32
STY !abs
F8
3
5
33
TAX
E8
1
2
Transfer accumulator contents to X-register : X
A
N-----Z-
34
TAY
9F
1
2
Transfer accumulator contents to Y-register : Y
A
N-----Z-
35
TSPX
AE
1
2
Transfer stack-pointer contents to X-register : X
sp
N-----Z-
36
TXA
C8
1
2
Transfer X-register contents to accumulator: A
X
N-----Z-
37
TXSP
8E
1
2
Transfer X-register contents to stack-pointer: sp
X
N-----Z-
38
TYA
BF
1
2
Transfer Y-register contents to accumulator: A
Y
N-----Z-
39
XAX
EE
1
4
Exchange X-register contents with accumulator :X
A
--------
40
XAY
DE
1
4
Exchange Y-register contents with accumulator :Y
A
--------
41
XMA dp
BC
2
5
Exchange memory contents with accumulator
42
XMA dp+X
AD
2
6
( M )
A
N-----Z-
43
XMA {X}
BB
1
5
44
XYX
FE
1
4
Exchange X-register contents with Y-register : X
Y
--------

APPENDIX
lxxvi
JUNE 2001 Ver 1.00
16-BIT operation
Bit Manipulation
No.
Mnemonic
Op
Code
Byte
No
Cycle
No
Operation
Flag
NVGBHIZC
1
ADDW dp
1D
2
5
16-Bits add without Carry
YA
( YA ) ( dp +1 ) ( dp )
NV--H-ZC
2
CMPW dp
5D
2
4
Compare YA contents with memory pair contents :
(YA)
-
(dp+1)(dp)
N-----ZC
3
DECW dp
BD
2
6
Decrement memory pair
( dp+1)( dp)
( dp+1) ( dp) - 1
N-----Z-
4
INCW dp
9D
2
6
Increment memory pair
( dp+1) ( dp)
( dp+1) ( dp ) + 1
N-----Z-
5
LDYA dp
7D
2
5
Load YA
YA
( dp +1 ) ( dp )
N-----Z-
6
STYA dp
DD
2
5
Store YA
( dp +1 ) ( dp )
YA
--------
7
SUBW dp
3D
2
5
16-Bits subtract without carry
YA
( YA ) - ( dp +1) ( dp)
NV--H-ZC
No.
Mnemonic
Op
Code
Byte
No
Cycle
No
Operation
Flag
NVGBHIZC
1
AND1 M.bit
8B
3
4
Bit AND C-flag : C
( C )
( M .bit )
-------C
2
AND1B M.bit
8B
3
4
Bit AND C-flag and NOT : C
( C )
~( M .bit )
-------C
3
BIT dp
0C
2
4
Bit test A with memory :
MM----Z-
4
BIT !abs
1C
3
5
Z
( A )
( M ) , N
( M
7
) , V
( M
6
)
5
CLR1 dp.bit
y1
2
4
Clear bit : ( M.bit )
"0"
--------
6
CLRA1 A.bit
2B
2
2
Clear A bit : ( A.bit )
"0"
--------
7
CLRC
20
1
2
Clear C-flag : C
"0"
-------0
8
CLRG
40
1
2
Clear G-flag : G
"0"
--0-----
9
CLRV
80
1
2
Clear V-flag : V
"0"
-0--0---
10
EOR1 M.bit
AB
3
5
Bit exclusive-OR C-flag : C
( C )
( M .bit )
-------C
11
EOR1B M.bit
AB
3
5
Bit exclusive-OR C-flag and NOT : C
( C )
~(M .bit)
-------C
12
LDC M.bit
CB
3
4
Load C-flag : C
( M .bit )
-------C
13
LDCB M.bit
CB
3
4
Load C-flag with NOT : C
~( M .bit )
-------C
14
NOT1 M.bit
4B
3
5
Bit complement : ( M .bit )
~( M .bit )
--------
15
OR1 M.bit
6B
3
5
Bit OR C-flag : C
( C )
( M .bit )
-------C
16
OR1B M.bit
6B
3
5
Bit OR C-flag and NOT : C
( C )
~( M .bit )
-------C
17
SET1 dp.bit
x1
2
4
Set bit : ( M.bit )
"1"
--------
18
SETA1 A.bit
0B
2
2
Set A bit : ( A.bit )
"1"
--------
19
SETC
A0
1
2
Set C-flag : C
"1"
-------1
20
SETG
C0
1
2
Set G-flag : G
"1"
--1-----
21
STC M.bit
EB
3
6
Store C-flag : ( M .bit )
C
--------
22
TCLR1 !abs
5C
3
6
Test and clear bits with A :
A - ( M ) , ( M )
( M )
~( A )
N-----Z-
23
TSET1 !abs
3C
3
6
Test and set bits with A :
A - ( M ) , ( M )
( M )
( A )
N-----Z-

APPENDIX
JUNE 2001 Ver 1.00
lxxvii
Branch / Jump Operation
No.
Mnemonic
Op
Code
Byte
No
Cycle
No
Operation
Flag
NVGBHIZC
1
BBC A.bit,rel
y2
2
4/6
Branch if bit clear :
--------
2
BBC dp.bit,rel
y3
3
5/7
if ( bit ) = 0 , then pc
( pc ) + rel
3
BBS A.bit,rel
x2
2
4/6
Branch if bit set :
--------
4
BBS dp.bit,rel
x3
3
5/7
if ( bit ) = 1 , then pc
( pc ) + rel
5
BCC rel
50
2
2/4
Branch if carry bit clear
if ( C ) = 0 , then pc
( pc ) + rel
--------
6
BCS rel
D0
2
2/4
Branch if carry bit set
if ( C ) = 1 , then pc
( pc ) + rel
--------
7
BEQ rel
F0
2
2/4
Branch if equal
if ( Z ) = 1 , then pc
( pc ) + rel
--------
8
BMI rel
90
2
2/4
Branch if minus
if ( N ) = 1 , then pc
( pc ) + rel
--------
9
BNE rel
70
2
2/4
Branch if not equal
if ( Z ) = 0 , then pc
( pc ) + rel
--------
10
BPL rel
10
2
2/4
Branch if plus
if ( N ) = 0 , then pc
( pc ) + rel
--------
11
BRA rel
2F
2
4
Branch always
pc
( pc ) + rel
--------
12
BVC rel
30
2
2/4
Branch if overflow bit clear
if (V) = 0 , then pc
( pc) + rel
--------
13
BVS rel
B0
2
2/4
Branch if overflow bit set
if (V) = 1 , then pc
( pc ) + rel
--------
14
CALL !abs
3B
3
8
Subroutine call
15
CALL [dp]
5F
2
8
M( sp)
( pc
H
), sp
sp - 1, M(sp)
(pc
L
), sp
sp - 1,
if !abs, pc
abs ; if [dp], pc
L
( dp ), pc
H
( dp+1 ) .
--------
16
CBNE dp,rel
FD
3
5/7
Compare and branch if not equal :
--------
17
CBNE dp+X,rel
8D
3
6/8
if ( A )
( M ) , then pc
( pc ) + rel.
18
DBNE dp,rel
AC
3
5/7
Decrement and branch if not equal :
--------
19
DBNE Y,rel
7B
2
4/6
if ( M )
0 , then pc
( pc ) + rel.
20
JMP !abs
1B
3
3
Unconditional jump
21
JMP [!abs]
1F
3
5
pc
jump address
--------
22
JMP [dp]
3F
2
4
23
PCALL upage
4F
2
6
U-page call
M(sp)
( pc
H
), sp
sp - 1, M(sp)
( pc
L
),
sp
sp - 1, pc
L
( upage ), pc
H
"0FF
H
" .
--------
24
TCALL n
nA
1
8
Table call : (sp)
( pc
H
), sp
sp - 1,
M(sp)
( pc
L
),sp
sp - 1,
pc
L
(Table vector L), pc
H
(Table vector H)
--------

APPENDIX
lxxviii
JUNE 2001 Ver 1.00
Control Operation & Etc.
No.
Mnemonic
Op
Code
Byte
No
Cycle
No
Operation
Flag
NVGBHIZC
1
BRK
0F
1
8
Software interrupt : B
"1", M(sp)
(pc
H
), sp
sp-1,
M(s)
(pc
L
), sp
sp - 1, M(sp)
(PSW), sp
sp -1,
pc
L
( 0FFDE
H
) , pc
H
( 0FFDF
H
) .
---1-0--
2
DI
60
1
3
Disable all interrupts : I
"0"
-----0--
3
EI
E0
1
3
Enable all interrupt : I
"1"
-----1--
4
NOP
FF
1
2
No operation
--------
5
POP A
0D
1
4
sp
sp + 1, A
M( sp )
6
POP X
2D
1
4
sp
sp + 1, X
M( sp )
--------
7
POP Y
4D
1
4
sp
sp + 1, Y
M( sp )
8
POP PSW
6D
1
4
sp
sp + 1, PSW
M( sp )
restored
9
PUSH A
0E
1
4
M( sp )
A , sp
sp - 1
10
PUSH X
2E
1
4
M( sp )
X , sp
sp - 1
--------
11
PUSH Y
4E
1
4
M( sp )
Y , sp
sp - 1
12
PUSH PSW
6E
1
4
M( sp )
PSW , sp
sp - 1
13
RET
6F
1
5
Return from subroutine
sp
sp +1, pc
L
M( sp ), sp
sp +1, pc
H
M( sp )
--------
14
RETI
7F
1
6
Return from interrupt
sp
sp +1, PSW
M( sp ), sp
sp + 1,
pc
L
M( sp ), sp
sp + 1, pc
H
M( sp )
restored
15
STOP
EF
1
3
Stop mode ( halt CPU, stop oscillator )
--------