
1
HA-2556
57MHz, Wideband, Four Quadrant,
Voltage Output Analog Multiplier
The HA-2556 is a monolithic, high speed, four quadrant,
analog multiplier constructed in the Intersil Dielectrically
Isolated High Frequency Process. The voltage output
simplifies many designs by eliminating the current-to-voltage
conversion stage required for current output multipliers. The
HA-2556 provides a 450V/
µ
s slew rate and maintains
52MHz and 57MHz bandwidths for the X and Y channels
respectively, making it an ideal part for use in video systems.
The suitability for precision video applications is
demonstrated further by the Y Channel 0.1dB gain flatness
to 5.0MHz, 1.5% multiplication error, -50dB feedthrough and
differential inputs with 8
µ
A bias current. The HA-2556 also
has low differential gain (0.1%) and phase (0.1
o
) errors.
The HA-2556 is well suited for AGC circuits as well as mixer
applications for sonar, radar, and medical imaging
equipment. The HA-2556 is not limited to multiplication
applications only; frequency doubling, power detection, as
well as many other configurations are possible.
For MIL-STD-883 compliant product consult the
HA-2556/883 datasheet.
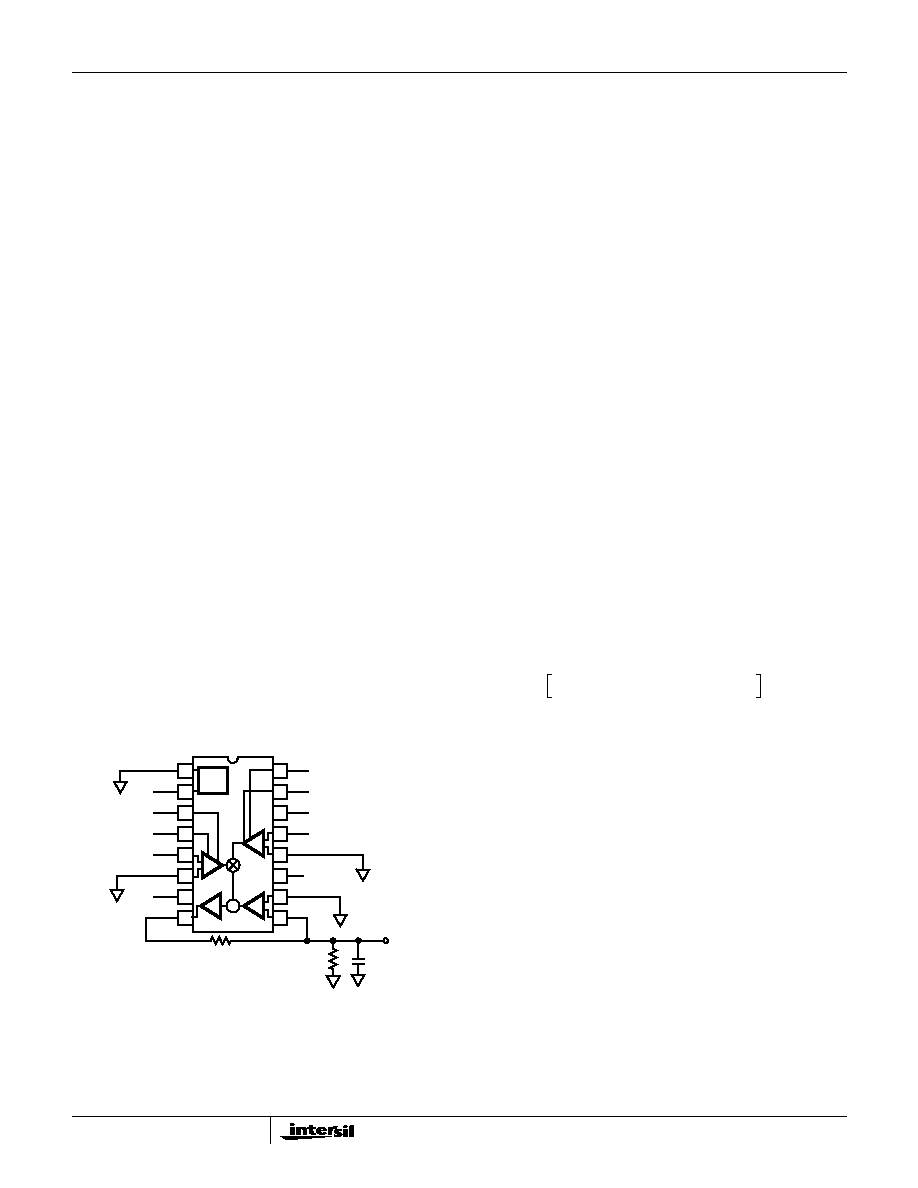
Pinout
HA-2556
(PDIP, CERDIP, SOIC)
TOP VIEW
Features
∑ High Speed Voltage Output . . . . . . . . . . . . . . . . . 450V/
µ
s
∑ Low Multiplication Error . . . . . . . . . . . . . . . . . . . . . . .1.5%
∑ Input Bias Currents. . . . . . . . . . . . . . . . . . . . . . . . . . . 8
µ
A
∑ 5MHz Feedthrough. . . . . . . . . . . . . . . . . . . . . . . . . . -50dB
∑ Wide Y Channel Bandwidth . . . . . . . . . . . . . . . . . . 57MHz
∑ Wide X Channel Bandwidth . . . . . . . . . . . . . . . . . . 52MHz
∑ V
Y
0.1dB Gain Flatness . . . . . . . . . . . . . . . . . . . . 5.0MHz
Applications
∑ Military Avionics
∑ Missile Guidance Systems
∑ Medical Imaging Displays
∑ Video Mixers
∑ Sonar AGC Processors
∑ Radar Signal Conditioning
∑ Voltage Controlled Amplifier
∑ Vector Generators
Functional Block Diagram
Ordering Information
PART NUMBER
TEMP.
RANGE (
o
C)
PACKAGE
PKG.
NO.
HA3-2556-9
-40 to 85
16 Ld PDIP
E16.3
HA9P2556-9
-40 to 85
16 Ld SOIC
M16.3
HA1-2556-9
-40 to 85
16 Ld CERDIP
F16.3
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
GND
V
REF
V
YIO
B
V
YIO
A
V
Y
+
V
Y
-
V
OUT
V-
V
XIO
A
NC
V
X
+
V
X
-
V+
V
Z
-
V
Z
+
V
XIO
B
+
-
REF
Y
X
Z
HA-2556
1/SF
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
+
-
A
+
-
+
-
+
-
NOTE: The transfer equation for the HA-2556 is:
(V
X+
-V
X-
) (V
Y+
-V
Y-
) = S
F
(V
Z+
-V
Z-
),
where SF = Scale Factor = 5V; V
X,
V
Y,
V
Z
= Differential Inputs.
Data Sheet
September 1998
File Number
2477.5
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
1-888-INTERSIL or 321-724-7143
|
Copyright
©
Intersil Corporation 1999
2
Absolute Maximum Ratings
Thermal Information
Voltage Between V+ and V- Terminals. . . . . . . . . . . . . . . . . . . . 35V
Differential Input Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6V
Output Current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
±
60mA
Operating Conditions
Temperature Range . . . . . . . . . . . . . . . . . . . . . . . . . -40
o
C to 85
o
C
Thermal Resistance (Typical, Note 1)
JA
(
o
C/W)
JC
(
o
C/W)
PDIP Package . . . . . . . . . . . . . . . . . . .
77
N/A
SOIC Package . . . . . . . . . . . . . . . . . . .
90
N/A
CERDIP Package . . . . . . . . . . . . . . . . .
75
20
Maximum Junction Temperature (Ceramic Package) . . . . . . . 175
o
C
Maximum Junction Temperature (Plastic Packages) . . . . . . 150
o
C
Maximum Storage Temperature Range . . . . . . . . . . -65
o
C to 150
o
C
Maximum Lead Temperature (Soldering 10s) . . . . . . . . . . . . 300
o
C
(SOIC - Lead Tips Only)
CAUTION: Stresses above those listed in "Absolute Maximum Ratings" may cause permanent damage to the device. This is a stress only rating and operation of the
device at these or any other conditions above those indicated in the operational sections of this specification is not implied.
NOTE:
1.
JA
is measured with the component mounted on an evaluation PC board in free air.
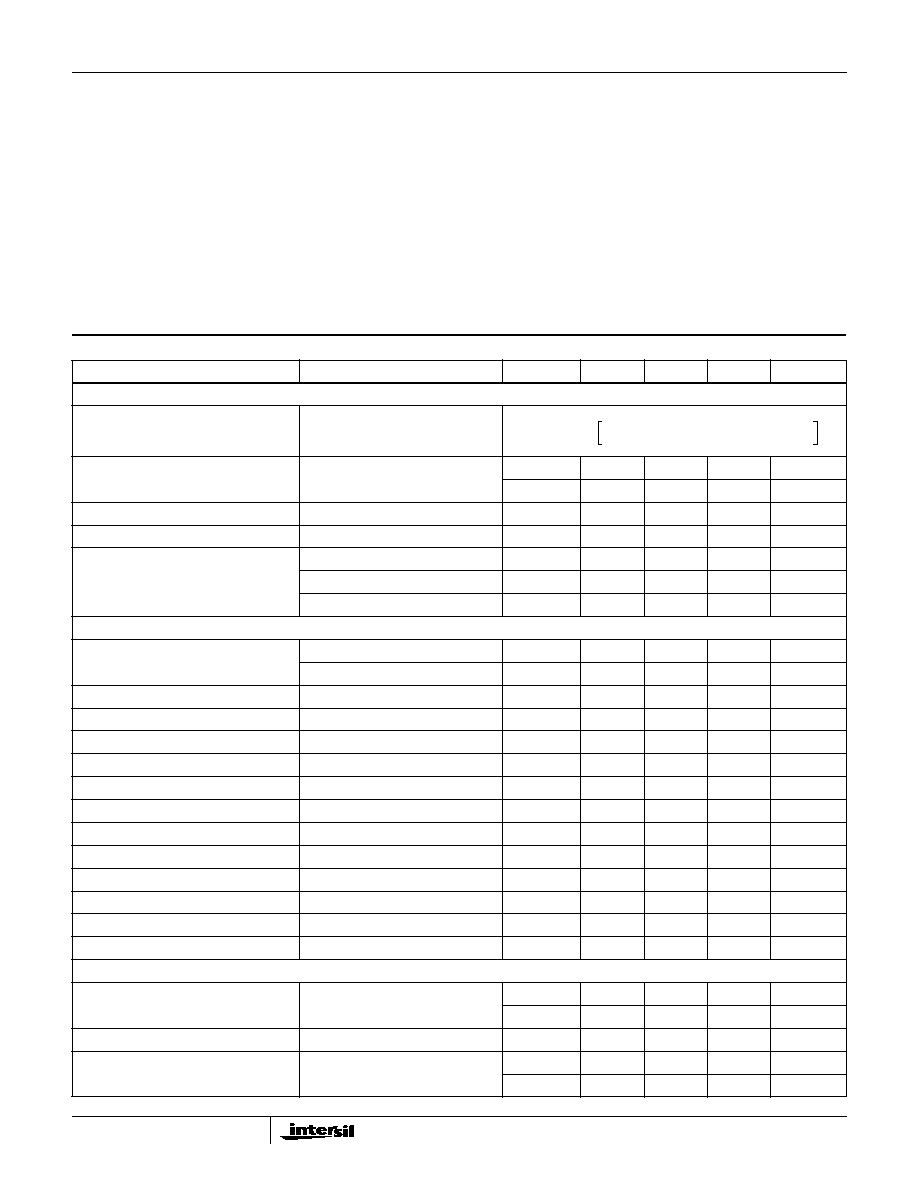
Electrical Specifications
V
SUPPLY
=
±
15V, R
F
= 50
, R
L
= 1k
, C
L
= 20pF, Unless Otherwise Specified
PARAMETER
TEST CONDITIONS
TEMP. (
o
C)
MIN
TYP
MAX
UNITS
MULTIPLIER PERFORMANCE
Transfer Function
Multiplication Error
Note 2
25
-
1.5
3
%
Full
-
3.0
6
%
Multiplication Error Drift
Full
-
0.003
-
%/
o
C
Scale Factor
25
-
5
-
V
Linearity Error
V
X
, V
Y
=
±
3V, Full Scale = 3V
25
-
0.02
-
%
V
X
, V
Y
=
±
4V, Full Scale = 4V
25
-
0.05
0.25
%
V
X
, V
Y
=
±
5V, Full Scale = 5V
25
-
0.2
0.5
%
AC CHARACTERISTICS
Small Signal Bandwidth (-3dB)
V
Y
= 200mV
P-P
, V
X
= 5V
25
-
57
-
MHz
V
X
= 200mV
P-P
, V
Y
= 5V
25
-
52
-
MHz
Full Power Bandwidth (-3dB)
10V
P-P
25
-
32
-
MHz
Slew Rate
Note 5
25
420
450
-
V/
µ
s
Rise Time
Note 6
25
-
8
-
ns
Overshoot
Note 6
25
-
20
-
%
Settling Time
To 0.1%, Note 5
25
-
100
-
ns
Differential Gain
Notes 3, 8
25
-
0.1
0.2
%
Differential Phase
Notes 3, 8
25
-
0.1
0.3
Degrees
V
Y
0.1dB Gain Flatness
200mV
P-P
, V
X
= 5V, Note 8
25
4.0
5.0
-
MHz
V
X
0.1dB Gain Flatness
200mV
P-P
, V
Y
= 5V, Note 8
25
2.0
4.0
-
MHz
THD + N
Note 4
25
-
0.03
-
%
1MHz Feedthrough
200mV
P-P
, Other Ch Nulled
25
-
-65
-
dB
5MHz Feedthrough
200mV
P-P
, Other Ch Nulled
25
-
-50
-
dB
SIGNAL INPUT (V
X
, V
Y
, V
Z)
Input Offset Voltage
25
-
3
15
mV
Full
-
8
25
mV
Average Offset Voltage Drift
Full
-
45
-
µ
V/
o
C
Input Bias Current
25
-
8
15
µ
A
Full
-
12
20
µ
A
V
OUT
A
V
X+
V
X-
≠
(
)
V
Y+
V
Y-
≠
(
)
◊
5
--------------------------------------------------------------------
V
Z+
V
Z-
≠
(
)
≠
=
HA-2556
3
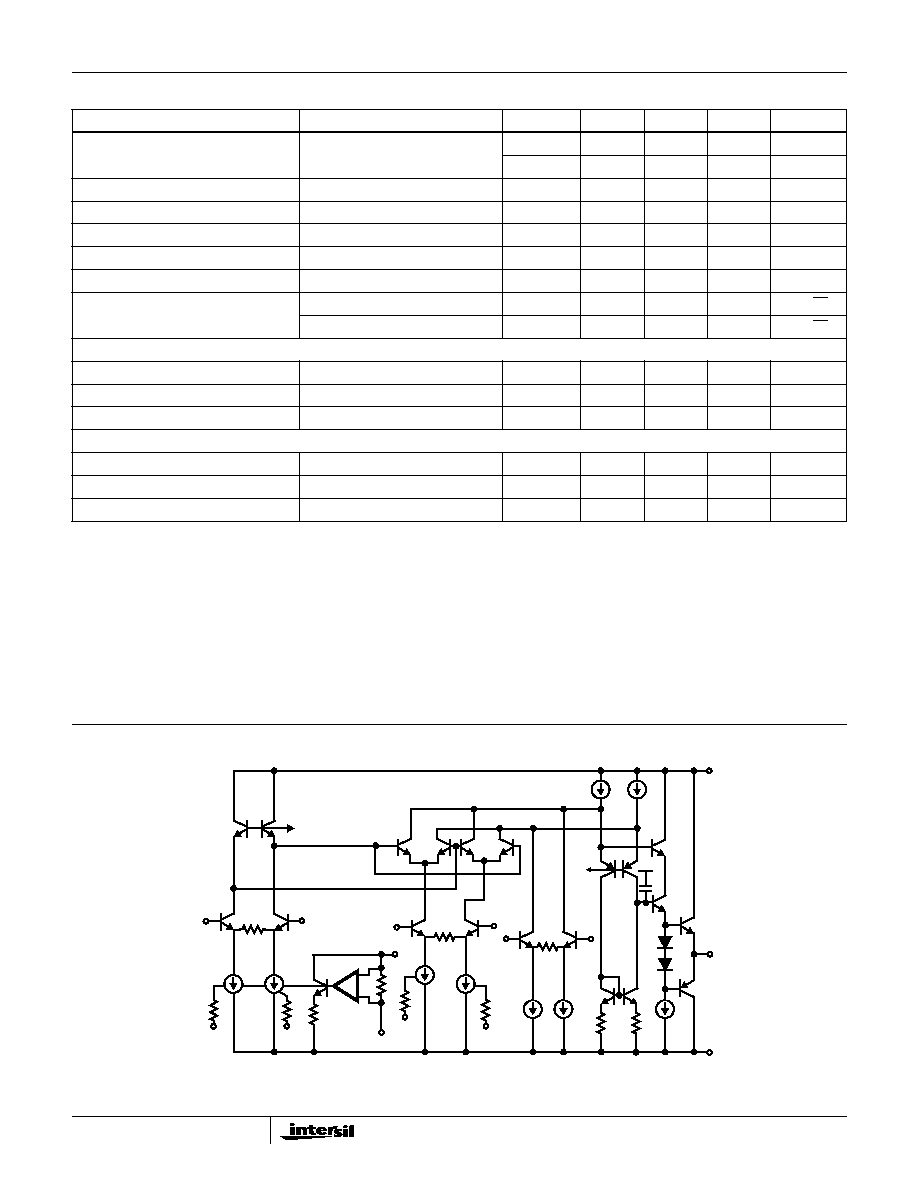
Simplified Schematic
Input Offset Current
25
-
0.5
2
µ
A
Full
-
1.0
3
µ
A
Differential Input Resistance
25
-
1
-
M
Full Scale Differential Input (V
X
, V
Y
, V
Z
)
25
±
5
-
-
V
V
X
Common Mode Range
25
-
±
10
-
V
V
Y
Common Mode Range
25
-
+9, -10
-
V
CMRR Within Common Mode Range
Full
65
78
-
dB
Voltage Noise (Note 9)
f = 1kHz
25
-
150
-
nV/
Hz
f = 100kHz
25
-
40
-
nV/
Hz
OUTPUT CHARACTERISTICS
Output Voltage Swing
Note 10
Full
±
5.0
±
6.05
-
V
Output Current
Full
±
20
±
45
-
mA
Output Resistance
25
-
0.7
1.0
POWER SUPPLY
+PSRR
Note 7
Full
65
80
-
dB
-PSRR
Note 7
Full
45
55
-
dB
Supply Current
Full
-
18
22
mA
NOTES:
2. Error is percent of full scale, 1% = 50mV.
3. f = 4.43MHz, V
Y
= 300mV
P-P
, 0 to 1V
DC
offset, V
X
= 5V.
4. f = 10kHz, V
Y
= 1V
RMS
, V
X
= 5V.
5. V
OUT
= 0 to
±
4V.
6. V
OUT
= 0 to
±
100mV.
7. V
S
=
±
12V to
±
15V.
8. Guaranteed by characterization and not 100% tested.
9. V
X
= V
Y
= 0V.
10. V
X
= 5.5V, V
Y
=
±
5.5V.
Electrical Specifications
V
SUPPLY
=
±
15V, R
F
= 50
, R
L
= 1k
, C
L
= 20pF, Unless Otherwise Specified (Continued)
PARAMETER
TEST CONDITIONS
TEMP. (
o
C)
MIN
TYP
MAX
UNITS
V
BIAS
OUT
V
Z
-
V
CC
V
Z
+
V-
V+
V
YIO
A
V
YIO
B
V
Y
-
V
Y
+
V
XIO
A
V
XIO
B
V
X
+
REF
GND
V
X
-
+
-
V
BIAS
HA-2556
4
Application Information
Operation at Reduced Supply Voltages
The HA-2556 will operate over a range of supply voltages,
±
5V to
±
15V. Use of supply voltages below
±
12V will reduce
input and output voltage ranges. See "Typical Performance
Curves" for more information.
Offset Adjustment
X and Y channel offset voltages may be nulled by using a
20K potentiometer between the V
YIO
or V
XIO
adjust pin A
and B and connecting the wiper to V-. Reducing the channel
offset voltage will reduce AC feedthrough and improve the
multiplication error. Output offset voltage can also be nulled
by connecting V
Z
- to the wiper of a potentiometer which is
tied between V+ and V-.
Capacitive Drive Capability
When driving capacitive loads >20pF a 50
resistor should
be connected between V
OUT
and V
Z
+, using V
Z
+ as the
output (see Figure 1). This will prevent the multiplier from
going unstable and reduce gain peaking at high frequencies.
The 50
resistor will dampen the resonance formed with the
capacitive load and the inductance of the output at pin 8.
Gain accuracy will be maintained because the resistor is
inside the feedback loop.
Theory of Operation
The HA-2556 creates an output voltage that is the product
of the X and Y input voltages divided by a constant scale
factor of 5V. The resulting output has the correct polarity in
each of the four quadrants defined by the combinations of
positive and negative X and Y inputs. The Z stage provides
the means for negative feedback (in the multiplier
configuration) and an input for summation into the output.
This results in the following equation, where X, Y and Z are
high impedance differential inputs
.
To accomplish this the differential input voltages are first
converted into differential currents by the X and Y input
transconductance stages. The currents are then scaled by a
constant reference and combined in the multiplier core. The
multiplier core is a basic Gilbert Cell that produces a
differential output current proportional to the product of X and
Y input signal currents. This current becomes the output for
the HA-2557.
The HA-2556 takes the output current of the core and feeds it
to a transimpedance amplifier, that converts the current to a
voltage. In the multiplier configuration, negative feedback is
provided with the Z transconductance amplifier by connecting
V
OUT
to the Z input. The Z stage converts V
OUT
to a current
which is subtracted from the multiplier core before being
applied to the high gain transimpedance amp. The Z stage, by
virtue of it's similarity to the X and Y stages, also cancels
second order errors introduced by the dependence of V
BE
on
collector current in the X and Y stages.
The purpose of the reference circuit is to provide a stable
current, used in setting the scale factor to 5V. This is
achieved with a bandgap reference circuit to produce a
temperature stable voltage of 1.2V which is forced across a
NiCr resistor. Slight adjustments to scale factor may be
possible by overriding the internal reference with the V
REF
pin. The scale factor is used to maintain the output of the
multiplier within the normal operating range of
±
5V when
full scale inputs are applied.
The Balance Concept
The open loop transfer equation for the HA-2556 is:
where;
A
= Output Amplifier Open Loop Gain
V
X,
V
Y,
V
Z
= Differential Input Voltages
5V
= Fixed Scaled Factor
An understanding of the transfer function can be gained by
assuming that the open loop gain, A, of the output amplifier
is infinite. With this assumption, any value of V
OUT
can be
generated with an infinitesimally small value for the terms
within the brackets. Therefore we can write the equation:
which simplifies to:
This form of the transfer equation provides a useful tool to
analyze multiplier application circuits and will be called the
Balance Concept.
NC
NC
V
Y
+
-15V
V
OUT
+15 V
V
X
+
NC
NC
50
1k
20pF
NC
NC
V
Z
-
V
Z
+
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
+
-
+
-
+
-
FIGURE 1. DRIVING CAPACITIVE LOAD
V
OUT
= Z
X x Y
5
--------------
=
V
OUT
= A
V
X+
-V
X-
(
)
x V
Y+
V
≠
Y-
(
)
5V
-------------------------------------------------------------------
- V
Z+
-V
Z-
(
)
0 =
V
X+
-V
X-
(
)
x V
Y+
-V
Y-
(
)
5V
-----------------------------------------------------------------
- V
Z+
-V
Z-
(
)
V
X+
-V
X-
(
)
x V
Y+
-V
Y-
(
)
= 5V V
Z+
-V
Z-
(
)
HA-2556

5
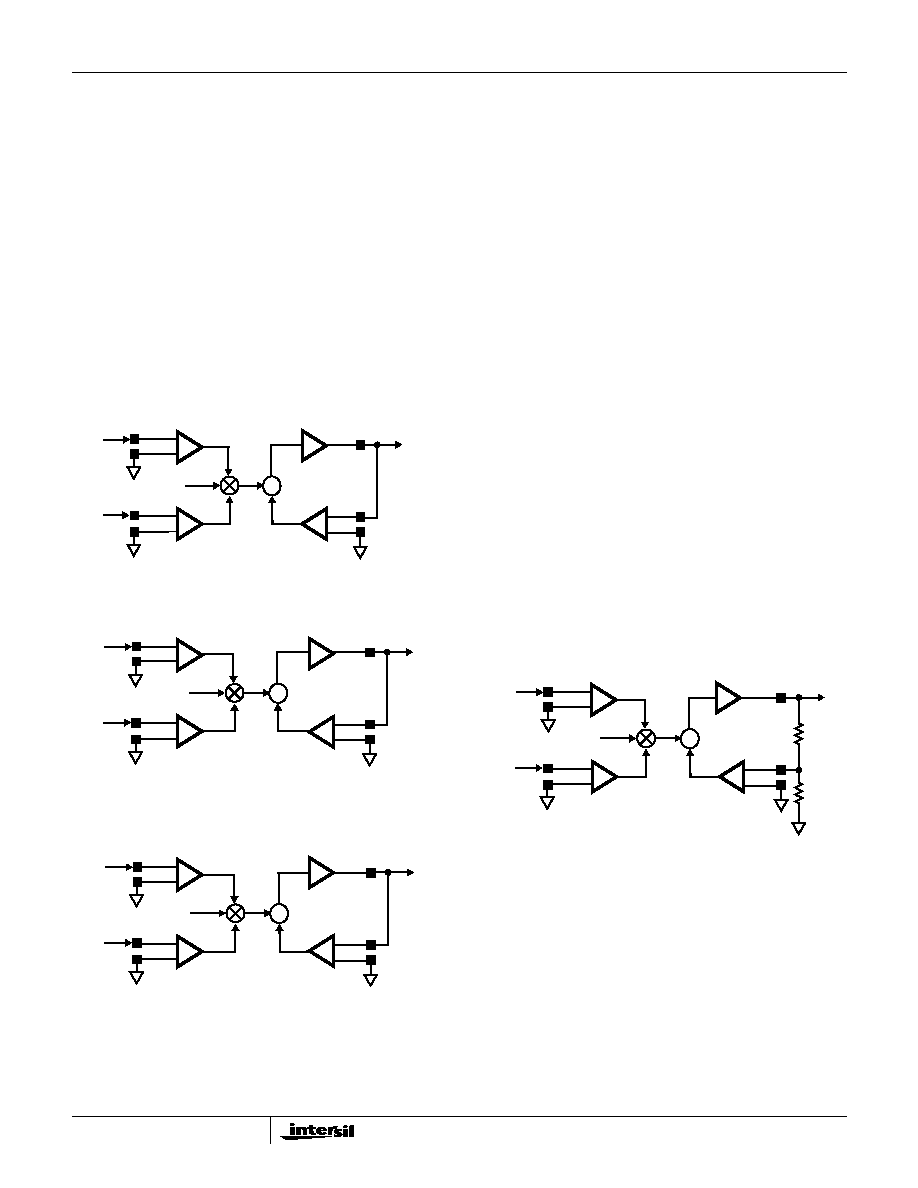
Typical Applications
Let's first examine the Balance Concept as it applies to the
standard multiplier configuration (Figure 2).
Signals A and B are input to the multiplier and the signal W
is the result. By substituting the signal values into the
Balance equation you get:
And solving for W:
Notice that the output (W) enters the equation in the
feedback to the Z stage. The Balance Equation does not test
for stability, so remember that you must provide negative
feedback. In the multiplier configuration, the feedback path is
connected to V
Z
+ input, not V
Z
-. This is due to the inversion
that takes place at the summing node just prior to the output
amplifier. Feedback is not restricted to the Z stage, other
feedback paths are possible as in the Divider Configuration
shown in Figure 3.
Inserting the signal values A, B and W into the Balance
Equation for the divider configuration yields:
Solving for W yields:
Notice that, in the divider configuration, signal B must remain
0 (positive) for the feedback to be negative. If signal B is
negative, then it will be multiplied by the V
X-
input to produce
positive feedback and the output will swing into the rail.
Signals may be applied to more than one input at a time as
in the Squaring configuration in Figure 4:
Here the Balance equation will appear as:
Which simplifies to:
The last basic configuration is the Square Root as shown in
Figure 5. Here feedback is provided to both X and Y inputs.
The Balance equation takes the form:
Which equates to:
The four basic configurations (Multiply, Divide, Square and
Square Root) as well as variations of these basic circuits
have many uses.
Frequency Doubler
For example, if ACos(
) is substituted for signal A in the
Square function, then it becomes a Frequency Doubler and
the equation takes the form:
And using some trigonometric identities gives the result:
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
A
B
+
-
+
-
A
+
-
+
-
FIGURE 2. MULTIPLIER
(A) x (B) = 5(W)
W =
A x B
5
--------------
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
A
B
+
-
+
-
+
-
A
+
-
FIGURE 3. DIVIDER
-W
(
)
B
( )
5V x -A
( )
=
W =
5A
B
-------
(A) x (A)
5(W)
=
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
A
A
+
-
+
-
+
-
+
-
FIGURE 4. SQUARE
W
A
2
5
-------
=
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
A
+
-
+
-
A
+
-
+
-
FIGURE 5. SQUARE ROOT (FOR A > 0)
W
( )
W
≠
(
)
◊
5
A
≠
(
)
=
W
5A
=
ACos
(
)
(
)
ACos
(
)
(
)
◊
5 W
( )
=
W
A
2
10
-------
1
Cos 2
(
)
+
(
)
=
HA-2556
6
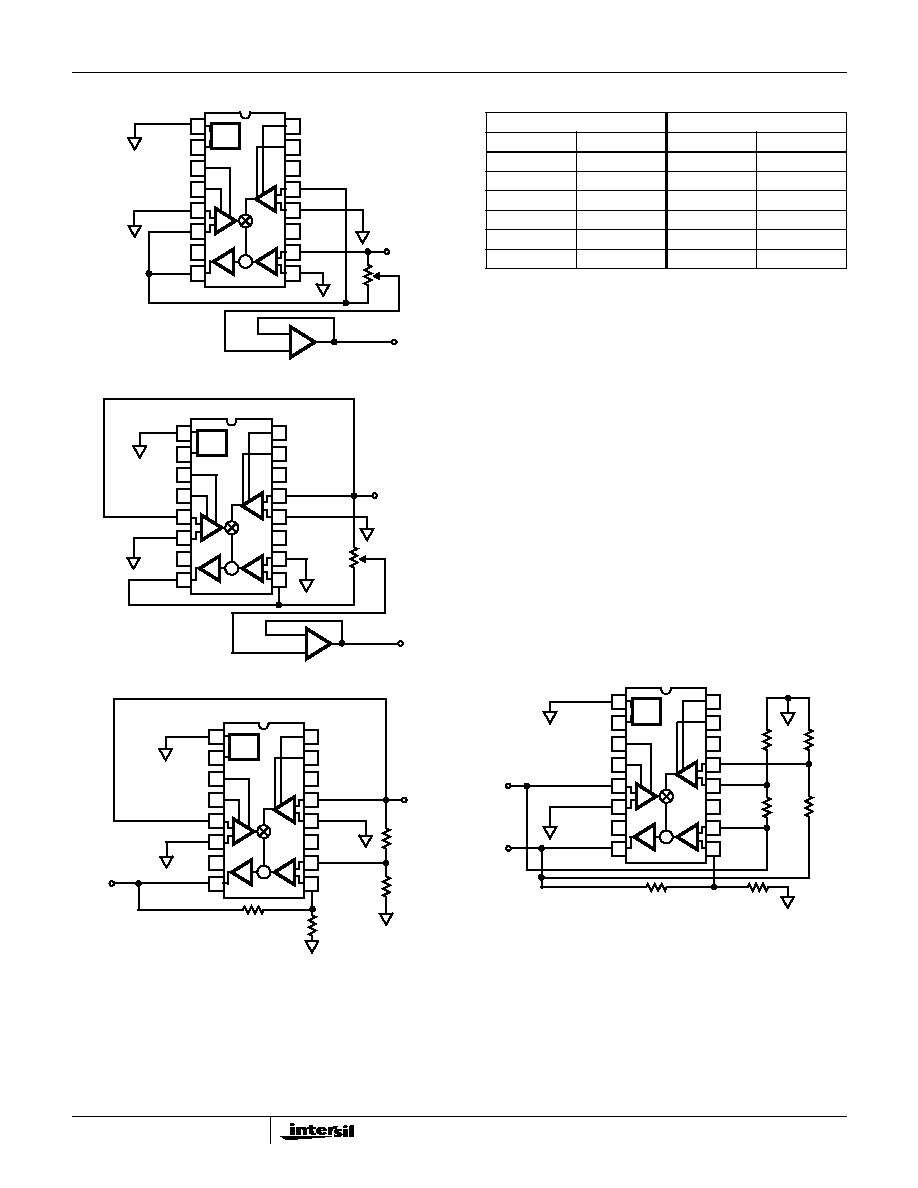
Square Root
The Square Root function can serve as a precision/wide
bandwidth compander for audio or video applications. A
compander improves the Signal to Noise Ratio for your
system by amplifying low level signals while attenuating or
compressing large signals (refer to Figure 17; X
0.5
curve).
This provides for better low level signal immunity to noise
during transmission. On the receiving end the original signal
may be reconstructed with the standard Square function.
Communications
The Multiplier configuration has applications in AM Signal
Generation, Synchronous AM Detection and Phase
Detection to mention a few. These circuit configurations are
shown in Figures 6, 7 and 8. The HA-2556 is particularly
useful in applications that require high speed signals on all
inputs.
Each input X, Y and Z has similar wide bandwidth and input
characteristics. This is unlike earlier products where one
input was dedicated to a slow moving control function as is
required for Automatic Gain Control. The HA-2556 is
versatile enough for both.
Although the X and Y inputs have similar AC characteristics,
they are not the same. The designer should consider input
parameters such as small signal bandwidth, AC feedthrough
and 0.1dB gain flatness to get the most performance from
the HA-2556. The Y channel is the faster of the two inputs
with a small signal bandwidth of typically 57MHz versus
52MHz for the X channel. Therefore in AM Signal
Generation, the best performance will be obtained with the
Carrier applied to the Y channel and the modulation signal
(lower frequency) applied to the X channel.
Scale Factor Control
The HA-2556 is able to operate over a wide supply voltage
range
±
5V to
±
17.5V. The
±
5V range is particularly useful in
video applications. At
±
5V the input voltage range is reduced
to
±
1.4V. The output cannot reach its full scale value with this
restricted input, so it may become necessary to modify the
scale factor. Adjusting the scale factor may also be useful
when the input signal itself is restricted to a small portion of
the full scale level. Here we can make use of the high gain
output amplifier by adding external gain resistors.
Generating the maximum output possible for a given input
signal will improve the Signal to Noise Ratio and Dynamic
Range of the system. For example, let's assume that the
input signals are 1V
PEAK
each. Then the maximum output
for the HA-2556 will be 200mV. (1V x 1V)/(5V) = 200mV. It
would be nice to have the output at the same full scale as
our input, so let's add a gain of 5 as shown in Figure 9.
One caveat is that the output bandwidth will also drop by this
factor of 5. The multiplier equation then becomes:
Current Output
Another useful circuit for low voltage applications allows the
user to convert the voltage output of the HA2556 to an output
current. The HA-2557 is a current output version offering
100MHz of bandwidth, but its scale factor is fixed and does not
have an output amplifier for additional scaling. Fortunately the
circuit in Figure 10 provides an output current that can be
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
ACos(
)
CCos(
C
)
Carrier
Audio
W
AC
10
--------
Cos
C
A
≠
(
)
Cos
C
A
+
(
)
+
(
)
=
+
-
+
-
A
+
-
+
-
FIGURE 6. AM SIGNAL GENERATION
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
AM Signal
Carrier
LIKE THE FREQUENCY DOUBLER YOU GET AUDIO CENTERED AT DC
+
-
+
-
A
+
-
+
-
FIGURE 7. SYNCHRONOUS AM DETECTION
AND 2F
C
.
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
ACos(
)
ACos(
+
)
W
A
2
10
-------
Cos
( )
Cos 2
+
(
)
+
(
)
=
DC COMPONENT IS PROPORTIONAL TO COS(f)
+
-
+
-
A
+
-
+
-
FIGURE 8. PHASE DETECTION
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W
A
B
1k
250
R
F
R
G
ExternalGain
R
F
R
G
--------
1
+
=
+
-
+
-
A
+
-
+
-
FIGURE 9. EXTERNAL GAIN OF 5
W
5AB
5
------------
A
B
◊
=
=
HA-2556

7
scaled with the value of R
CONVERT
and provides an output
impedance of typically 1M
. The equation for I
OUT
becomes:
Video Fader
The Video Fader circuit provides a unique function. Here Ch B
is applied to the minus Z input in addition to the minus Y input.
In this way, the function in Figure 11 is generated. V
MIX
will
control the percentage of Ch A and Ch B that are mixed
together to produce a resulting video image or other signal.
The Balance equation looks like:
Which simplifies to:
When V
MIX
is 0V the equation becomes V
OUT
= Ch B and
Ch A is removed, conversely when V
MIX
is 5V the equation
becomes V
OUT
= Ch A eliminating Ch B. For V
MIX
values
0V
V
MIX
5V the output is a blend of Ch A and Ch B.
Other Applications
As shown above, a function may contain several different
operators at the same time and use only one HA-2556.
Some other possible multi-operator functions are shown in
Figures 12, 13 and 14.
Of course the HA-2556 is also well suited to standard
multiplier applications such as Automatic Gain Control and
Voltage Controlled Amplifier.
Automatic Gain Control
Figure 15 shows the HA-2556 configured in an Automatic
Gain Control or AGC application. The HA-5127 low noise
amplifier provides the gain control signal to the X input. This
control signal sets the peak output voltage of the multiplier to
match the preset reference level. The feedback network
around the HA-5127 provides a response time adjustment.
High frequency changes in the peak are rejected as noise or
the desired signal to be transmitted. These signals do not
indicate a change in the average peak value and therefore
no gain adjustment is needed. Lower frequency changes in
the peak value are given a gain of -1 for feedback to the
control input. At DC the circuit is an integrator automatically
compensating for Offset and other constant error terms.
I
OUT
A
B
◊
5
--------------
1
R
CONVERT
--------------------------------
◊
=
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
I
OUT
A
B
R
CONVERT
+
-
+
-
A
+
-
+
-
FIGURE 10. CURRENT OUTPUT
V
MIX
(
)
ChA
ChB
≠
(
)
◊
5 V
OUT
ChB
≠
(
)
=
V
OUT
ChB
V
MIX
5
--------------
ChA
ChB
≠
(
)
+
=
NC
NC
V
Y
+
-15V
V
OUT
+15 V
V
X
+
NC
NC
50
NC
NC
V
Z
-
V
Z
+
Ch A
Ch B
V
Y
-
V
MIX
(0V to 5V)
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
+
-
+
-
+
-
FIGURE 11. VIDEO FADER
FIGURE 13. PERCENTAGE DEVIATION
FIGURE 14. DIFFERENCE DIVIDED BY SUM S (For A + B
0V)
HA-2556
1/5V
X
Y
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W = 5(A
2
-B
2
)
A
B
5K
5K
5K
5K
+
-
+
-
A
+
-
+
-
FIGURE 12. DIFFERENCE OF SQUARES
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W = 100
B
A
A - B
A
95K
5K
R
2
R
1
R
1
and R
2
set scale to 1V/%, other scale factors possible.
For A 0V.
+
-
+
-
A
+
-
+
-
HA-2556
1/5V
X
Y
V
OUT
Z
V
X
+
V
X
-
V
Y
+
V
Y
-
V
Z
+
V
Z
-
W = 10
B
A
A - B
B + A
5K
5K
+
-
+
-
A
+
-
+
-
HA-2556

8
This multiplier has the advantage over other AGC circuits, in
that the signal bandwidth is not affected by the control signal
gain adjustment.
Voltage Controlled Amplifier
A wide range of gain adjustment is available with the Voltage
Controlled Amplifier configuration shown in Figure 16. Here
the gain of the HFA0002 can be swept from 20V/V to a gain
of almost 1000V/V with a DC voltage from 0V to 5V.
Wave Shaping Circuits
Wave shaping or curve fitting is another class of application
for the analog multiplier. For example, where a nonlinear
sensor requires corrective curve fitting to improve linearity
the HA-2556 can provide nonintegral powers in the range 1
to 2 or nonintegral roots in the range 0.5 to 1.0 (refer to
References). This effect is displayed in Figure 17.
A multiplier can't do nonintegral roots "exactly", but it can
yield a close approximation. We can approximate
nonintegral roots with equations of the form:
Figure 18 compares the function V
OUT
= V
IN
0.7
to the
approximation V
OUT
= 0.5V
IN
0.5
+ 0.5V
IN
.
This function can be easily built using an HA-2556 and a
potentiometer for easy adjustment as shown in Figures 19 and
20. If a fixed nonintegral power is desired, the circuit shown in
Figure 21 eliminates the need for the output buffer amp. These
circuits approximate the function V
IN
M
where M is the desired
nonintegral power or root.
FIGURE 15. AUTOMATIC GAIN CONTROL
FIGURE 16. VOLTAGE CONTROLLED AMPLIFIER
NC
NC
V
Y
+
V-
V
OUT
V+
NC
NC
50
HA-2556
5k
10k
HA-5127
0.01
µ
F
10k
0.1
µ
F
1N914
5.6V
0.1
µ
F
+15V
20k
NC
NC
+
-
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
Y
X
Z
NC
NC
V
X
+ (V
GAIN
)
V-
V
IN
V+
NC
NC
HFA0002
5k
V
OUT
500
NC
NC
HA-2556
+
-
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
Y
X
Z
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
INPUT (V)
OUTPUT (V)
X
0.5
X
0.7
X
1.5
X
2
FIGURE 17. EFFECT OF NONINTEGRAL POWERS / ROOTS
V
o
1
≠
(
)
V
IN
2
V
IN
+
=
V
o
1
≠
(
)
V
IN
1 2
/
V
IN
+
=
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
INPUT (V)
OUTPUT (V)
X
X
0.7
0.5X
0.5
+ 0.5X
FIGURE 18. COMPARE APPROXIMATION TO NONINTEGRAL
ROOT
HA-2556
9
Setting:
Values for
to give a desired M root or power are as follows:
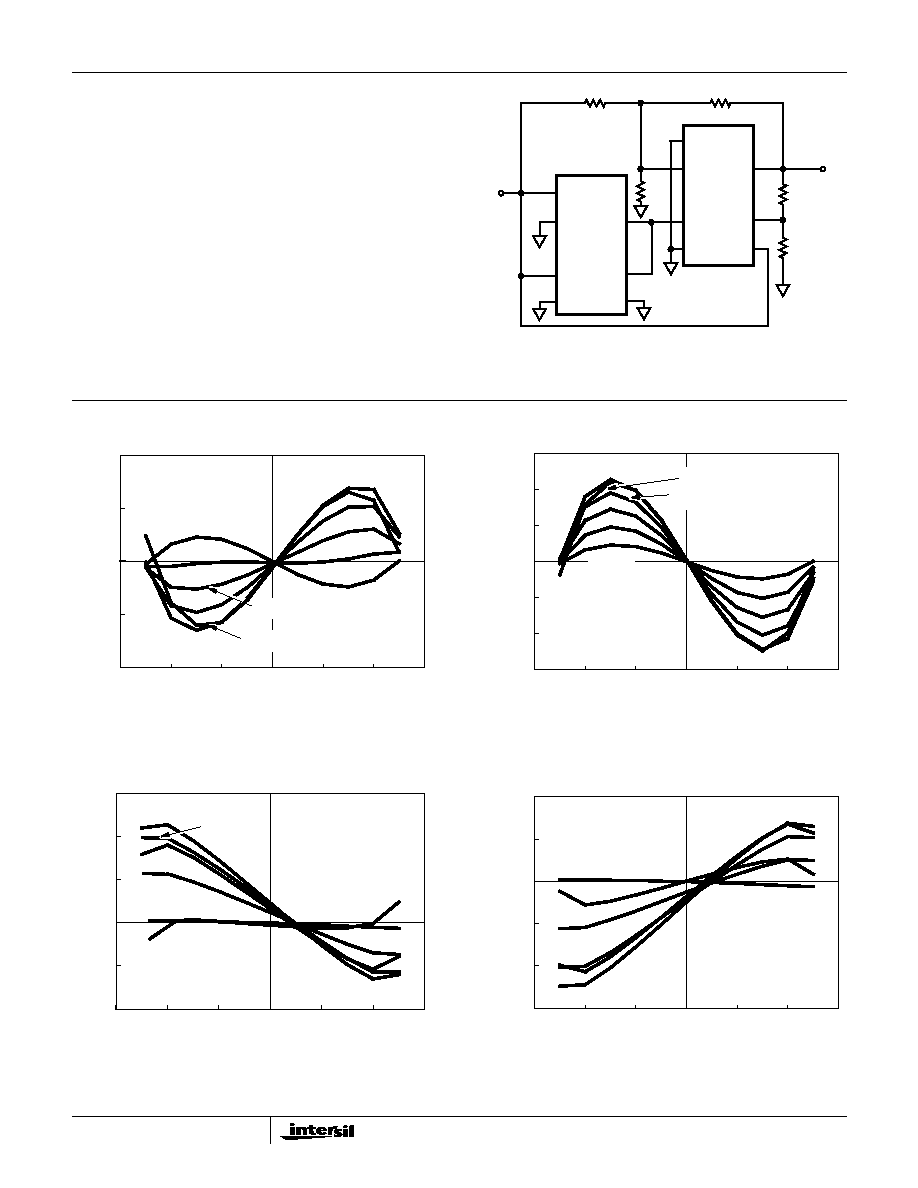
Sine Function Generators
Similar functions can be formulated to approximate a SINE
function converter as shown in Figure 22. With a linearly
changing (0V to 5V) input the output will follow 0 degrees to 90
degrees of a sine function (0V to 5V) output. This configuration
is theoretically capable of
±
2.1% maximum error to full scale.
By adding a second HA-2556 to the circuit an improved fit
may be achieved with a theoretical maximum error of
±
0.5%
as shown in Figure 23. Figure 23 has the added benefit that it
will work for positive and negative input signals. This makes a
convenient triangle (
±
5V input) to sine wave (
±
5V output)
converter.
References
[1] Pacifico Cofrancesco, "RF Mixers and Modulators made
with a Monolithic Four-Quadrant Multiplier" Microwave
Journal, December 1991 pg. 58 - 70.
[2] Richard Goller, "IC Generates Nonintegral Roots"
Electronic Design, December 3, 1992.
FIGURE 19. NONINTEGRAL ROOTS - ADJUSTABLE
FIGURE 20. NONINTEGRAL POWERS - ADJUSTABLE
FIGURE 21. NONINTEGRAL POWERS - FIXED
NC
NC
V-
V
IN
V+
NC
NC
HA-2556
HA-5127
NC
NC
V
OUT
0V
V
IN
1V
0.5
M
1.0
1-
+
-
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
Y
X
Z
+
-
+
-
+
-
NC
NC
V-
V
IN
V+
NC
NC
HA-2556
HA-5127
NC
NC
V
OUT
0V
V
IN
1V
1.0
M
2.0
1-
+
-
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
Y
X
Z
+
-
+
-
+
-
NC
NC
V-
V
IN
V+
NC
NC
HA-2556
NC
NC
V
OUT
0V
V
IN
1V
1.2
M
2.0
R
3
R
4
R
1
R
2
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
Y
X
Z
+
-
+
-
+
-
V
OUT
1
5
---
R
3
R
4
-------
1
+
V
IN
2
R
3
R
4
-------
1
+
R
2
R
1
R
2
+
---------------------
V
IN
+
=
1
≠
1
5
---
R
3
R
4
-------
1
+
=
R
3
R
4
-------
1
+
R
2
R
1
R
2
+
---------------------
=
ROOTS - FIGURE 19
POWERS - FIGURE 20
M
M
0.5
0
1.0
1
0.6
0.25
1.2
0.75
0.7
0.50
1.4
0.5
0.8
0.70
1.6
0.3
0.9
0.85
1.8
0.15
1.0
1
2.0
0
NC
NC
V-
V
IN
V+
NC
NC
HA-2556
NC
NC
V
OUT
R
3
, 644
R
4
, 1K
R
2
R
1
R
6
R
5
262
470
470
1410
14
15
16
9
13
12
11
10
1
2
3
4
5
7
6
8
+
-
REF
Y
X
Z
+
-
+
-
+
-
FIGURE 22. SINE-FUNCTION GENERATOR
HA-2556
10
for; 0V
V
IN
5V
Max Theoretical Error = 2.1%FS
where:
for; -5V
V
IN
5V
Max Theoretical Error = 0.5%FS
V
OUT
V
IN
1
0.1284V
IN
≠
(
)
0.6082
0.05V
IN
≠
(
)
---------------------------------------------------
=
5sin
2
---
V
IN
5
---------
0.6082
R
4
R
3
R
4
+
---------------------
=
5 0.1284
(
)
R
2
R
1
R
2
+
---------------------
=
5 0.05
(
)
R
6
R
5
R
6
+
---------------------
=
;
V
OUT
5V
IN
0.05494V
IN
3
≠
3.18167
0.0177919V
IN
2
+
-------------------------------------------------------------------
5sin
2
---
V
IN
5
---------
=
10K
X
+
X
-
Y
+
Y
-
X
+
X
-
Y
+
Y
-
V
OUT
Z
+
Z
-
V
OUT
Z
+
Z
-
V
IN
V
OUT
HA-2556
HA-2556
23.1K
71.5K
5.71K
10K
FIGURE 23. BIPOLAR SINE-FUNCTION GENERATOR
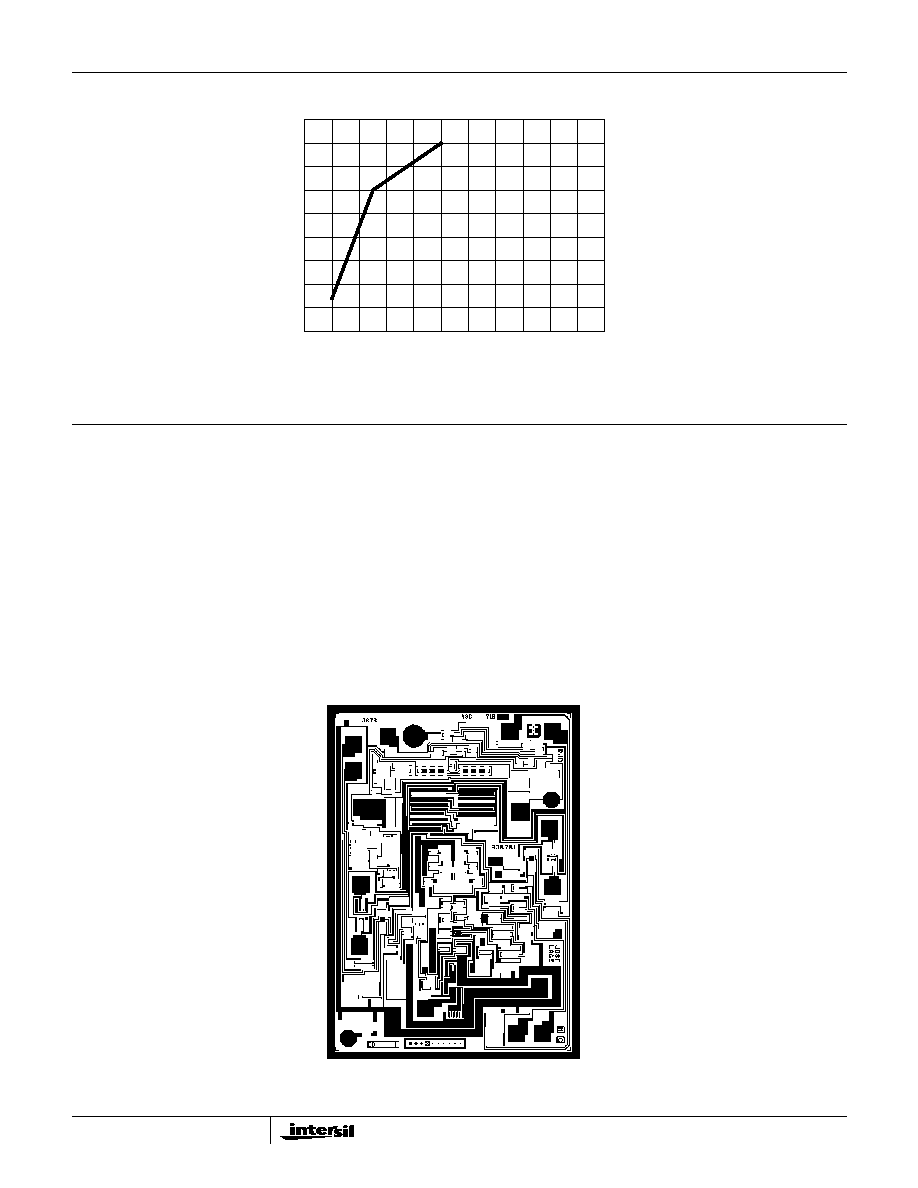
Typical Performance Curves
FIGURE 24. X CHANNEL MULTIPLIER ERROR
FIGURE 25. X CHANNEL MULTIPLIER ERROR
FIGURE 26. Y CHANNEL MULTIPLIER ERROR
FIGURE 27. Y CHANNEL MULTIPLIER ERROR
-6
-4
-2
0
2
4
6
-1
-0.5
0
0.5
1
X INPUT (V)
ERR
OR (%FS)
Y = 0
Y = 1
Y = 3
Y = 4
Y = 2
Y = 5
-6
-4
-2
0
2
4
6
-1.5
-1
-0.5
0
0.5
1
1.5
X INPUT (V)
ERR
OR (%FS)
Y = -4
Y = -2
Y = -1
Y = 0
Y = -5
Y = -3
-6
-4
-2
0
2
4
6
-1
-0.5
0
0.5
1
1.5
Y INPUT (V)
ERR
OR (%FS)
X = -3
X = -2
X = -4
X = -1
X = -5
X = 0
-6
-4
-2
0
2
4
6
-1.5
-1
-0.5
0
0.5
1
Y INPUT (V)
ERR
OR (%FS)
X = 0
X = 5
X = 1
X = 2
X = 4
X = 3
HA-2556
11
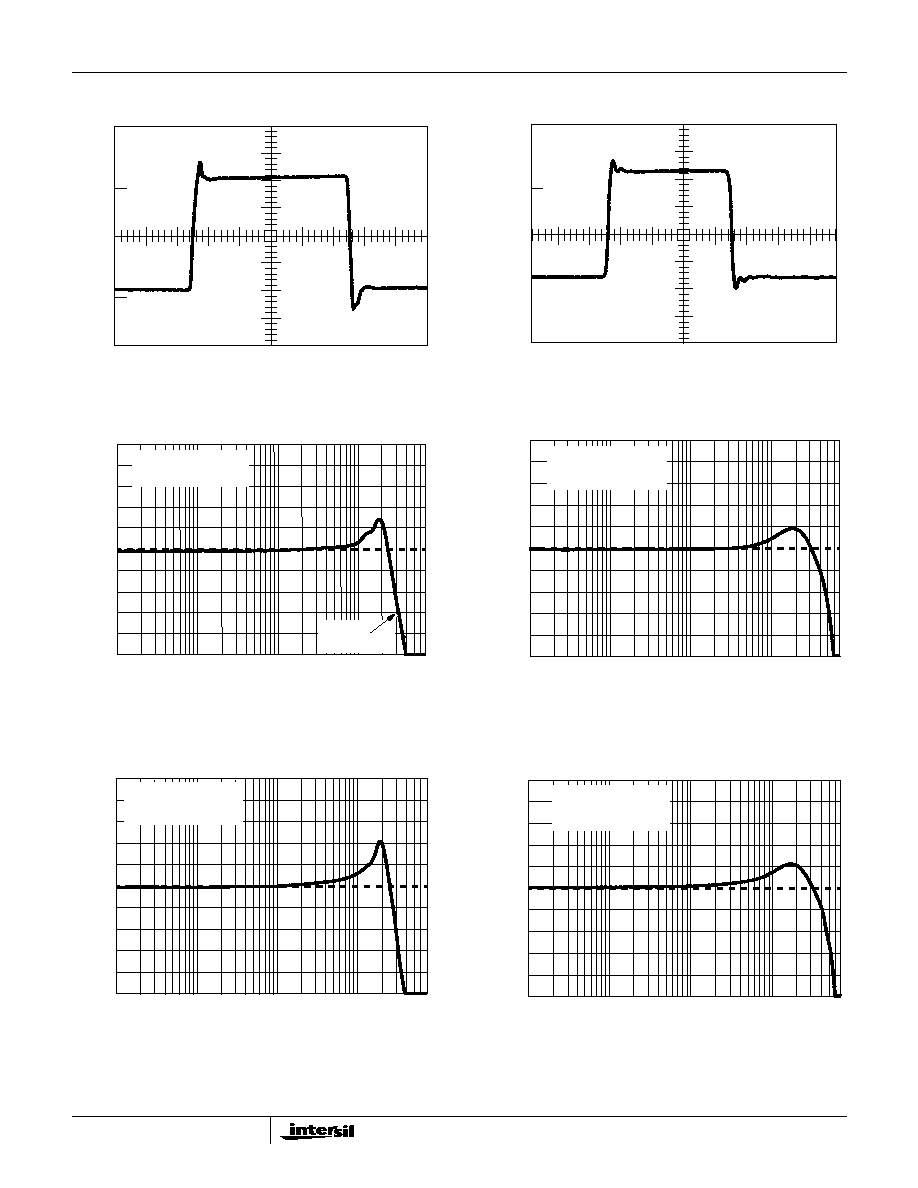
FIGURE 28. LARGE SIGNAL RESPONSE
FIGURE 29. SMALL SIGNAL RESPONSE
FIGURE 30. Y CHANNEL FULL POWER BANDWIDTH
FIGURE 31. Y CHANNEL FULL POWER BANDWIDTH
FIGURE 32. X CHANNEL FULL POWER BANDWIDTH
FIGURE 33. X CHANNEL FULL POWER BANDWIDTH
Typical Performance Curves
(Continued)
8
4
0
-4
-8
V
X
=
±
4V PULSE
V
Y
= 5V
DC
OUTPUT (V)
0ns
500ns
1
µ
s
2V/DIV.; 100ns/DIV.
0
OUTPUT (mV)
V
Y
=
±
100mV PULSE
V
X
= 5V
DC
0ns
250ns
500ns
200
100
-100
-200
50mV/DIV.; 50ns/DIV.
2
0
-2
GAIN (dB)
-1
-3
3
4
1
-4
1M
10M
100K
10K
Y CHANNEL = 10V
P-P
X CHANNEL = 5V
DC
FREQUENCY (Hz)
-3dB
AT 32.5MHz
1M
10M
100K
10K
FREQUENCY (Hz)
2
0
-2
GAIN (dB)
-1
-3
3
4
1
-4
Y CHANNEL = 4V
P-P
X CHANNEL = 5V
DC
1M
10M
100K
10K
FREQUENCY (Hz)
2
0
-2
GAIN (dB)
-1
-3
3
4
1
-4
X CHANNEL = 10V
P-P
Y CHANNEL = 5V
DC
X CHANNEL = 4V
P-P
Y CHANNEL = 5V
DC
2
0
-2
GAIN (dB)
-1
-3
3
4
1
-4
1M
10M
100K
10K
FREQUENCY (Hz)
HA-2556
12
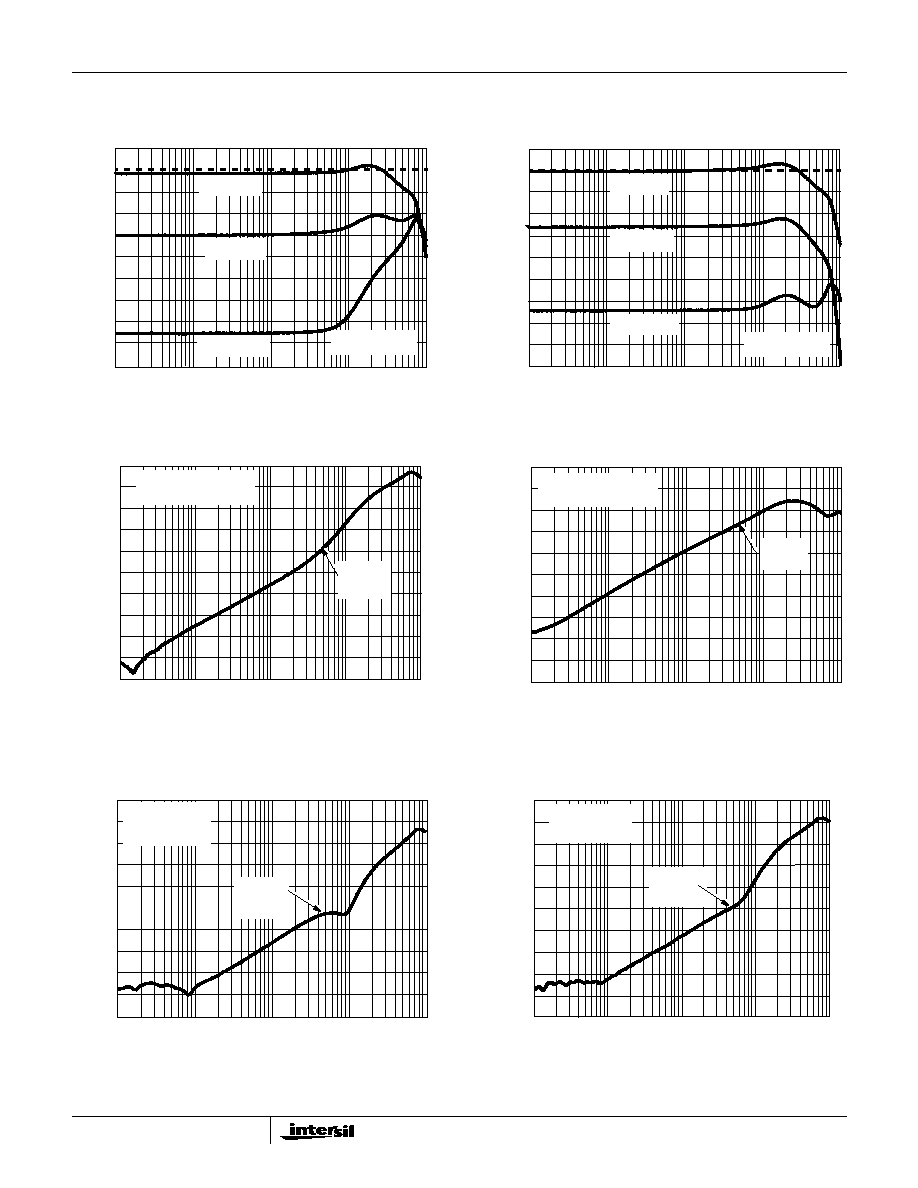
FIGURE 34. Y CHANNEL BANDWIDTH vs X CHANNEL
FIGURE 35. X CHANNEL BANDWIDTH vs Y CHANNEL
FIGURE 36. Y CHANNEL CMRR vs FREQUENCY
FIGURE 37. X CHANNEL CMRR vs FREQUENCY
FIGURE 38. FEEDTHROUGH vs FREQUENCY
FIGURE 39. FEEDTHROUGH vs FREQUENCY
Typical Performance Curves
(Continued)
10M
100M
1M
FREQUENCY (Hz)
10K
100K
0
-12
GAIN (dB)
-6
-18
-24
V
X
= 0.5V
DC
V
X
= 2V
DC
V
X
= 5V
DC
V
Y
= 200mV
P-P
0
-12
GAIN (dB)
-6
-18
-24
10M
100M
1M
FREQUENCY (Hz)
10K
100K
V
X
= 200mV
P-P
V
Y
= 0.5V
DC
V
Y
= 2V
DC
V
Y
= 5V
DC
1M
100M
100K
10K
FREQUENCY (Hz)
-30
-50
-70
CMRR (dB)
-60
-80
-20
-10
-40
10M
V
Y
+, V
Y
- = 200mV
RMS
5MHz
-38.8dB
0
V
X
= 5V
DC
5MHz
-26.2dB
-30
-50
-70
CMRR (dB)
-60
-80
-20
-10
-40
0
1M
100M
100K
10K
FREQUENCY (Hz)
10M
V
X
+, V
X
- = 200mV
RMS
V
Y
= 5V
DC
1M
100M
100K
10K
FREQUENCY (Hz)
10M
-52.6dB
AT 5MHz
-30
-50
-70
FEEDTHR
OUGH (dB)
-60
-80
-20
-10
-40
0
V
X
= 200mV
P-P
V
Y
= NULLED
V
Y
= 200mV
P-P
-49dB
AT 5MHz
-30
-50
-70
FEEDTHR
OUGH (dB)
-60
-80
-20
-10
-40
0
1M
100M
100K
10K
FREQUENCY (Hz)
10M
V
X
= NULLED
HA-2556

13
FIGURE 40. OFFSET VOLTAGE vs TEMPERATURE
FIGURE 41. INPUT BIAS CURRENT (V
X
, V
Y
, V
Z
) vs
TEMPERATURE
FIGURE 42. SCALE FACTOR ERROR vs TEMPERATURE
FIGURE 43. INPUT VOLTAGE RANGE vs SUPPLY VOLTAGE
FIGURE 44. INPUT COMMON MODE RANGE vs SUPPLY
VOLTAGE
FIGURE 45. SUPPLY CURRENT vs SUPPLY VOLTAGE
Typical Performance Curves
(Continued)
-100
-50
0
50
100
150
0
1
2
3
4
5
6
7
8
TEMPERATURE (
o
C)
OFFSET V
O
L
T
A
GE (mV)
|V
IO
Z|
|V
IO
X|
|V
IO
Y|
-100
-50
0
50
100
150
4
5
6
7
8
9
10
11
12
13
14
TEMPERATURE (
o
C)
BIAS CURRENT (uA)
-100
-50
0
50
100
150
-1
-0.5
0
0.5
1
1.5
2
TEMPERATURE (
o
C)
SCALE F
A
CT
OR ERR
OR (%)
4
6
8
10
12
14
16
1
2
3
4
5
6
SUPPLY VOLTAGE (
±
V)
INPUT V
O
L
T
A
GE RANGE (V)
X INPUT
Y INPUT
4
6
8
10
12
14
16
-15
-10
-5
0
5
10
15
SUPPLY VOLTAGE (
±
V)
CMR (V)
X & Y INPUT
X INPUT
Y INPUT
0
5
10
15
20
0
5
10
15
20
25
SUPPLY VOLTAGE (
±
V)
SUPPL
Y CURRENT (mA)
I
EE
I
CC
HA-2556
14
Die Characteristics
DIE DIMENSIONS:
71 mils x 100 mils x 19 mils
METALLIZATION:
Type: Al, 1% Cu
Thickness: 16k
≈
±
2k
≈
PASSIVATION:
Type: Nitride (Si
3
N
4
) over Silox (SiO
2
, 5% Phos)
Silox Thickness: 12k
≈
±
2k
≈
Nitride Thickness: 3.5k
≈
±
2k
≈
TRANSISTOR COUNT:
84
SUBSTRATE POTENTIAL:
V-
Metallization Mask Layout
HA-2556
FIGURE 46. OUTPUT VOLTAGE vs R
LOAD
Typical Performance Curves
(Continued)
100
300
500
700
900
1100
4.2
4.4
4.6
4.8
5.0
R
LOAD
(
)
MAX OUTPUT V
O
L
T
A
GE (V)
GND
(1)
VREF
(2)
V
YIO
B
(3)
V
YIO
A
(4)
V
Y
+
(5)
V
Y
-
(6)
(7)
V-
(8)
V
OUT
(9)
V
Z
+
(10)
V
Z
-
V+
(11)
V
X
-
(12)
V
X
+
(13)
V
XIO
B
(15)
V
XIO
A
(16)
HA-2556
15
All Intersil semiconductor products are manufactured, assembled and tested under ISO9000 quality systems certification.
Intersil semiconductor products are sold by description only. Intersil Corporation reserves the right to make changes in circuit design and/or specifications at any time with-
out notice. Accordingly, the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be accurate and
reliable. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may result
from its use. No license is granted by implication or otherwise under any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see web site www.intersil.com
Sales Office Headquarters
NORTH AMERICA
Intersil Corporation
P. O. Box 883, Mail Stop 53-204
Melbourne, FL 32902
TEL: (321) 724-7000
FAX: (321) 724-7240
EUROPE
Intersil SA
Mercure Center
100, Rue de la Fusee
1130 Brussels, Belgium
TEL: (32) 2.724.2111
FAX: (32) 2.724.22.05
ASIA
Intersil (Taiwan) Ltd.
7F-6, No. 101 Fu Hsing North Road
Taipei, Taiwan
Republic of China
TEL: (886) 2 2716 9310
FAX: (886) 2 2715 3029
HA-2556