 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: HIP6019CB | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

2-252
HIP6019
Advanced Dual PWM and Dual Linear
Power Control
The HIP6019 provides the power control and protection for four
output voltages in high-performance microprocessor and
computer applications. The IC integrates two PWM controllers,
a linear regulator and a linear controller as well as the
monitoring and protection functions into a single 28 lead SOIC
package. One PWM controller regulates the microprocessor
core voltage with a synchronous-rectified buck converter, while
the second PWM controller supplies the computer's 3.3V power
with a standard buck converter. The linear controller regulates
power for the GTL bus and the linear regulator provides power
for the clock driver circuits.
The HIP6019 includes an Intel-compatible, TTL 5-input digital-
to-analog converter (DAC) that adjusts the core PWM output
voltage from 2.1V
DC
to 3.5V
DC
in 0.1V increments and from
1.8V
DC
to 2.05V
DC
in 0.05V steps. The precision reference
and voltage-mode control provide
±
1% static regulation. The
second PWM controller is user-adjustable for output levels
between 3.0V and 3.5V with
±
2% accuracy. The adjustable
linear regulator uses an internal pass device to provide 2.5V
±
2.5%. The adjustable linear controller drives an external N-
Channel MOSFET to provide 1.5V
±
2.5%.
The HIP6019 monitors all the output voltages. A single Power
Good signal is issued when the core is within
±
10% of the DAC
setting and the other levels are above their under- voltage
levels. Additional built-in over-voltage protection for the core
output uses the lower MOSFET to prevent output voltages
above 115% of the DAC setting. The PWM controller's over-
current functions monitor the output current by sensing the
voltage drop across the upper MOSFET's r
DS(ON)
, eliminating
the need for a current sensing resistor.
Pinout
HIP6019 (SOIC)
TOP VIEW
Features
∑ Provides 4 Regulated Voltages
- Microprocessor Core, I/O, Clock Chip and GTL Bus
∑ Drives N-Channel MOSFETs
∑ Operates from +5V and +12V Inputs
∑ Simple Single-Loop Control Designs
- Voltage-Mode PWM Control
∑ Fast Transient Response
- High-Bandwidth Error Amplifiers
- Full 0% to 100% Duty Ratios
∑ Excellent Output Voltage Regulation
- Core PWM Output:
±
1% Over Temperature
- I/O PWM Output:
±
2% Over Temperature
- Other Outputs:
±
2.5% Over Temperature
∑ TTL-Compatible 5-Bit Digital-to-Analog Core Output
Voltage Selection
- Wide Range . . . . . . . . . . . . . . . . . . . 1.8V
DC
to 3.5V
DC
- 0.1V Steps . . . . . . . . . . . . . . . . . . . . 2.1V
DC
to 3.5V
DC
- 0.05V Steps . . . . . . . . . . . . . . . . . . 1.8V
DC
to 2.05V
DC
∑ Power-Good Output Voltage Monitor
∑ Microprocessor Core Voltage Protection Against Shorted
MOSFET
∑ Over-Voltage and Over-Current Fault Monitors
- Does Not Require Extra Current Sensing Element,
Uses MOSFET's r
DS(ON)
∑ Small Converter Size
- Constant Frequency Operation
- 200kHz Free-Running Oscillator; Programmable from
50kHz to 1MHz
Applications
∑ Full Motherboard Power Regulation for Computers
∑ Low-Voltage Distributed Power Supplies
UGATE2
PHASE2
VID4
VID3
FB2
COMP2
SS
FAULT/RT
FB4
V
CC
PGND
LGATE1
PHASE1
GATE3
COMP1
GND
VOUT4
VSEN2
UGATE1
28
27
26
25
24
23
22
21
20
19
18
17
16
15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
PGOOD
VID2
OCSET2
VSEN1
FB3
VID1
VID0
OCSET1
FB1
Ordering Information
PART NUMBER
TEMP. (
o
C)
PACKAGE
PKG. NO.
HIP6019CB
0 to 70
28 Ld SOIC
M28.3
HIP6019EVAL1
Evaluation Board
Data Sheet
April 1998
File Number
4490.2
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
http://www.intersil.com or 407-727-9207
|
Copyright
©
Intersil Corporation 1999
2-253
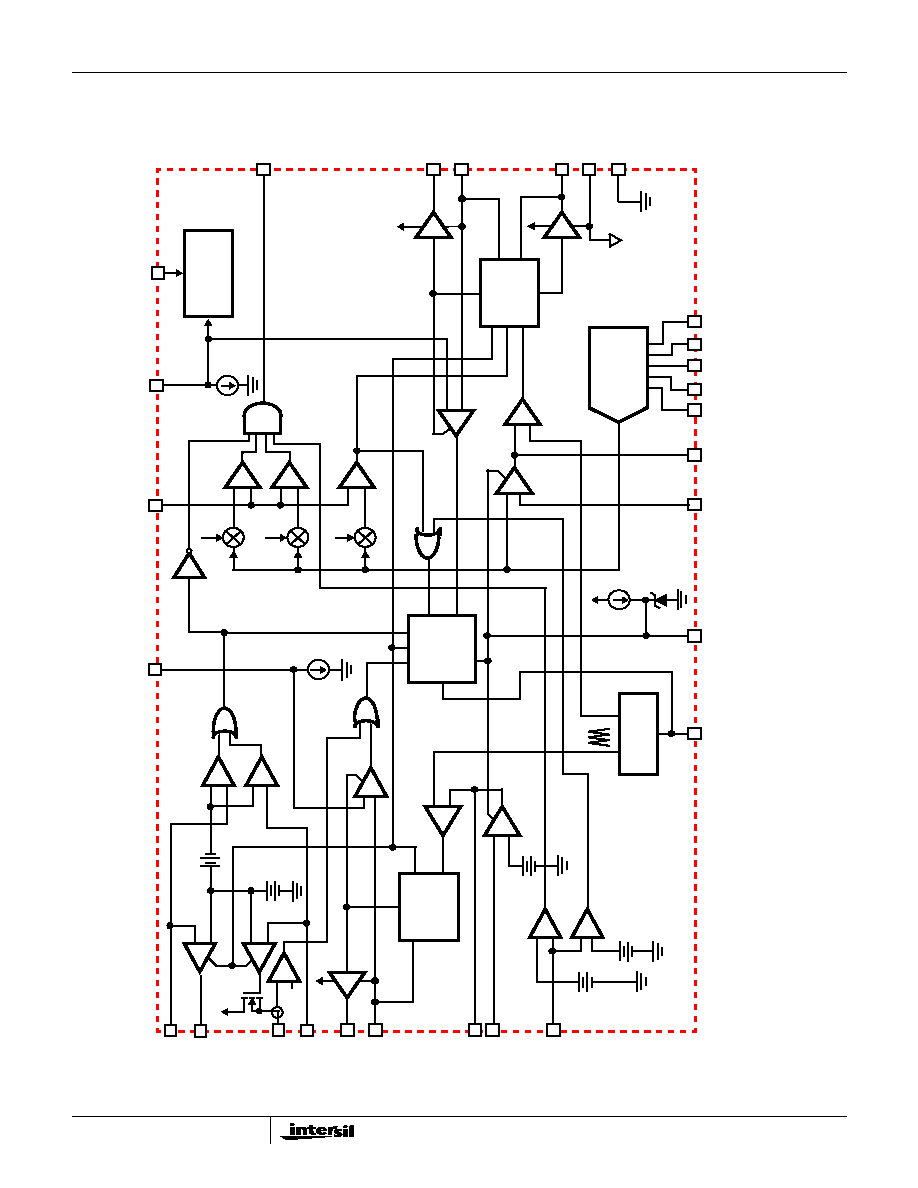
HIP6019
Block Diagram
0.25A
SOFT
-
ST
AR
T
115%
110%
90%
INHIBIT
PWM
COMP1
ERR
OR
AMP1
VCC
PGOOD
PWM1
GND
VSEN1
OCSET1
VID0
VID1
VID2
VID3
FB1
COMP1
D
A
COUT
UGA
TE1
PHASE1
200
µ
A
11
µ
A
4V
+
-
+
-
+
-
+
-
VID4
LGA
TE1
PGND
V
OUT4
GA
TE3
FB3
+
-
FB2
COMP2
INHIBIT
PWM2
GA
TE2
PHASE2
ERR
OR
AMP2
PWM
COMP2
200
µ
A
OCSET2
VSEN2
F
A
UL
T / R
T
0.3V
+
-
+
-
GA
TE
CONTR
OL
+
-
+
-
1.26V
+
-
+
-
+
-
PO
WER-ON
RESET (POR)
TTL D/A
CONVER
TER
(D
A
C
)
OSCILLA
T
O
R
+
-
+
-
GA
TE
CONTR
OL
VCC
VCC
VCC
VCC
AND F
A
UL
T
LOGIC
SS
+
2.5V
LO
WER
DRIVE
DRIVE1
DRIVE2
-
4.3V
+
-
+
-
VSEN2
+
1.26V
+
+
-
UNDER-
V
O
LTA
G
E
FB4
LINEAR
F
A
UL
T
OV
LUV
OC2
OC1
OC4
OC
+
-
FIGURE 1.

2-254
Simplified Power System Diagram
Typical Application
PWM1
+5V
IN
V
OUT1
V
OUT2
V
OUT3
V
OUT4
PWM2
LINEAR
LINEAR
HIP6019
CONTROLLER
CONTROLLER
CONTROLLER
REGULATOR
FIGURE 2.
VID1
VID2
VID3
VID4
SS
GND
VCC
+5V
IN
VID0
+12V
IN
V
OUT1
PGND
VSEN1
PGOOD
LGATE1
UGATE1
OCSET1
PHASE1
Q1
Q2
POWERGOOD
FB1
COMP1
1.8V TO 3.5V
VSEN2
UGATE2
OCSET2
PHASE2
Q3
CR2
FB2
COMP2
GATE3
FB3
VOUT4
C
OUT4
1.5V
2.5V
C
OUT3
C
OUT2
C
IN
C
OUT1
Q4
CR1
L
OUT2
L
OUT1
HIP6019
V
OUT2
V
OUT3
V
OUT4
3.0V TO 3.5V
FAULT / RT
FB4
C
SS
FIGURE 3.
HIP6019
2-255
Absolute Maximum Ratings
Thermal Information
Supply Voltage, V
CC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +15V
PGOOD, RT/FAULT, and GATE Voltage. . . . GND - 0.3V to V
CC
+ 0.3V
Input, Output or I/O Voltage . . . . . . . . . . . . . . . . . . GND -0.3V to 7V
ESD Classification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Class 2
Operating Conditions
Supply Voltage, V
CC
. . . . . . . . . . . . . . . . . . . . . . . . . . . +12V
±
10%
Ambient Temperature Range . . . . . . . . . . . . . . . . . . . . . 0
o
C to 70
o
C
Junction Temperature Range . . . . . . . . . . . . . . . . . . . . 0
o
C to 125
o
C
Thermal Resistance (Typical, Note 1)
JA
(
o
C/W)
SOIC Package. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
SOIC Package (with 3 in
2
of copper) . . . . . . . . . . .
50
Maximum Junction Temperature (Plastic Package) . . . . . . . .150
o
C
Maximum Storage Temperature Range . . . . . . . . . . -65
o
C to 150
o
C
Maximum Lead Temperature (Soldering 10s) . . . . . . . . . . . . .300
o
C
(SOIC - Lead Tips Only)
CAUTION: Stresses above those listed in "Absolute Maximum Ratings" may cause permanent damage to the device. This is a stress only rating and operation of the
device at these or any other conditions above those indicated in the operational sections of this specification is not implied.
NOTE:
1.
JA
is measured with the component mounted on an evaluation PC board in free air.
Electrical Specifications
Recommended Operating Conditions, Unless Otherwise Noted.
Refer to Figures 1, 2 and 3
PARAMETER
SYMBOL
TEST CONDITIONS
MIN
TYP
MAX
UNITS
VCC SUPPLY CURRENT
Nominal Supply
I
CC
UGATE1, GATE2, GATE3, LGATE1, and
VOUT4 Open
-
10
-
mA
POWER-ON RESET
Rising VCC Threshold
V
OCSET
= 4.5V
8.6
-
10.4
V
Falling VCC Threshold
V
OCSET
= 4.5V
8.2
-
10.2
V
Rising V
OCSET1
Threshold
-
1.25
-
V
OSCILLATOR
Free Running Frequency
RT = OPEN
185
200
215
kHz
Total Variation
6k
< RT to GND < 200k
-15
-
+15
%
Ramp Amplitude
V
OSC
RT = Open
-
1.9
-
V
P-P
REFERENCE AND DAC
DAC(VID0-VID4) Input Low Voltage
-
-
0.8
V
DAC(VID0-VID4) Input High Voltage
2.0
-
-
V
DACOUT Voltage Accuracy
-1.0
-
+1.0
%
Reference Voltage
(Pin FB2, FB3, and FB4)
1.240
1.265
1.290
V
LINEAR REGULATOR
Regulation
10mA < I
VOUT4
< 150mA
-2.5
-
2.5
%
Under-Voltage Level
FB4
UV
FB4 Rising
-
75
87
%
Under-Voltage Hysteresis
-
6
-
%
Over-Current Protection
180
230
-
mA
Over-Current Protection During Start-Up
C
SS
Voltage < 4V
560
700
-
mA
LINEAR CONTROLLER
Regulation
VSEN3 = GATE3
-2.5
-
2.5
%
Under-Voltage Level
FB3
UV
FB3 Rising
-
75
87
%
Under-Voltage Hysteresis
-
6
-
%
HIP6019

2-256
PWM CONTROLLER ERROR AMPLIFIERS
DC Gain
-
88
-
dB
Gain-Bandwidth Product
GBWP
-
15
-
MHz
Slew Rate
SR
COMP = 10pF
-
6
-
V/
µ
s
PWM CONTROLLER GATE DRIVERS
Drive1 (and 2) Source
I
UGATE
VCC = 12V, V
UGATE1
(or V
GATE2
) = 6V
-
1
-
A
Drive1 (and 2) Sink
R
UGATE
V
GATE-PHASE
= 1V
-
1.7
3.5
Lower Gate Source
I
LGATE
VCC = 12V, V
LGATE
= 1V
-
1
-
A
Lower Gate Sink
R
LGATE
V
GATE
= 1V
-
1.4
3.0
PROTECTION
V
OUT1
Over-Voltage Trip
VSEN1 Rising
112
115
118
%
V
OUT2
Over-Voltage Trip
VSEN2 Rising
4.1
4.3
4.5
V
VSEN2 Input Resistance
-
70
-
k
FAULT Sourcing Current
I
OVP
V
FAULT/RT
= 10.0V
10
14
-
mA
OCSET1(and 2) Current Source
I
OCSET
V
OCSET
= 4.5V
DC
170
200
230
µ
A
Soft-Start Current
I
SS
-
11
-
µ
A
Chip Shutdown Soft-Start Threshold
-
-
1.0
V
POWER GOOD
V
OUT1
Upper Threshold
VSEN1 Rising
108
-
110
%
V
OUT1
Under-Voltage
VSEN1 Rising
92
-
94
%
V
OUT1
Hysteresis
Upper/Lower Threshold
-
2
-
%
V
OUT2
Under-Voltage
VSEN2 Rising
2.45
2.55
2.65
V
V
OUT2
Under-Voltage Hysteresis
-
100
-
mV
PGOOD Voltage Low
V
PGOOD
I
PGOOD
= -4mA
-
-
0.5
V
Electrical Specifications
Recommended Operating Conditions, Unless Otherwise Noted.
Refer to Figures 1, 2 and 3 (Continued)
PARAMETER
SYMBOL
TEST CONDITIONS
MIN
TYP
MAX
UNITS
Typical Performance Curves
FIGURE 4. R
T
RESISTANCE vs FREQUENCY
FIGURE 5. BIAS SUPPLY CURRENT vs FREQUENCY
10
100
1000
SWITCHING FREQUENCY (kHz)
RESIST
ANCE (k
)
10
100
1000
R
T
PULLUP
TO +12V
R
T
PULLDOWN TO V
SS
C
GATE
= 660pF
C
GATE
= 1500pF
C
GATE
= 3600pF
C
GATE
= 4800pF
I
CC
(mA)
SWITCHING FREQUENCY (kHz)
20
40
140
120
100
80
60
100
200
300
400
500
600
700
800
900
1000
C
UGATE1
= C
UGATE2
= C
LGATE1
= C
GATE
V
VCC
= 12V,V
IN
= 5V
HIP6019

2-257
Functional Pin Description
VSEN1, VSEN2 (Pins 22 and 15)
These pins are connected to the PWM converters' output
voltages. The PGOOD and OVP comparator circuits use
these signals to report output voltage status and for over-
voltage protection. VSEN2 provides the input power to the
integrated linear regulator.
OCSET1, OCSET2 (Pins 23 and 9)
Connect a resistor (R
OCSET
) from this pin to the drain of the
respective upper MOSFET. R
OCSET
, an internal 200
µ
A
current source (I
OCSET
), and the upper MOSFET on-
resistance (r
DS(ON)
) set the converter over-current (OC) trip
point according to the following equation:
An over-current trip cycles the soft-start function. Sustaining an
over-current for 2 soft-start intervals shuts down the controller.
Additionally, OCSET1 is an output for the inverted FAULT
signal (FAULT). If a fault condition causes FAULT to go high,
OCSET1 will be simultaneously pulled to ground though an
internal MOS device (typical r
DS(ON)
= 100
).
SS (Pin 12)
Connect a capacitor from this pin to ground. This capacitor,
along with an internal 11
µ
A current source, sets the soft-
start interval of the converter.
Pulling this pin low (typically below 1.0V) with an open drain
signal will shutdown the IC.
VID0, VID1, VID2, VID3, VID4 (Pins 7, 6, 5, 4 and 3)
VID0-4 are the input pins to the 5-bit DAC. The states of these
five pins program the internal voltage reference (DACOUT).
The level of DACOUT sets the core converter output voltage
(V
OUT1
). It also sets the core PGOOD and OVP thresholds.
COMP1, COMP2, and FB1, FB2
(Pins 20, 11, 21, and 10)
COMP1, 2 and FB1, 2 are the available external pins of the
PWM error amplifiers. Both the FB pins are the inverting
input of the error amplifiers. Similarly, the COMP pins are the
error amplifier outputs. These pins are used to compensate
the voltage-control feedback loops of the PWM converters.
GND (Pin 17)
Signal ground for the IC. All voltage levels are measured with
respect to this pin.
PGOOD (Pin 8)
PGOOD is an open collector output used to indicate the
status of the PWM converter output voltages. This pin is
pulled low when the core output is not within
±
10% of the
DACOUT reference voltage, or when any of the other
outputs are below their under-voltage thresholds.
The PGOOD output is open for VID codes that inhibit
operation. See Table 1.
PHASE1, PHASE2 (Pins 26 and 2)
Connect the PHASE pins to the respective PWM
converter's upper MOSFET source. These pins are used to
monitor the voltage drop across the upper MOSFETs for
over-current protection.
UGATE1, UGATE2 (Pins 27 and 1)
Connect UGATE pins to the respective PWM converter's
upper MOSFET gate. These pins provide the gate drive for
the upper MOSFETs.
PGND (Pin 24)
This is the power ground connection. Tie the synchronous
PWM converter's lower MOSFET source to this pin.
LGATE1 (Pin 25)
Connect LGATE1 to the synchronous PWM converter's lower
MOSFET gate. This pin provides the gate drive for the lower
MOSFET.
VCC (Pin 28)
Provide a 12V bias supply for the IC to this pin. This pin also
provides the gate bias charge for all the MOSFETs
controlled by the IC.
FAULT/RT (Pin 13)
This pin provides oscillator switching frequency adjustment.
By placing a resistor (R
T
) from this pin to GND, the nominal
200kHz switching frequency is increased according to the
following equation:
Conversely, connecting a pull-up resistor (R
T
) from this pin
to VCC reduces the switching frequency according to the
following equation:
Nominally, this pin voltage is 1.26V, but is pulled to VCC in
the event of an over-voltage or over-current condition.
GATE3 (Pin 18)
Connect this pin to the gate of an external MOSFET. This pin
provides the drive for the linear controller's pass transistor.
FB3 (Pin 19)
Connect this pin to a resistor divider to set the linear
controller output.
VOUT4 (Pin 16)
Output of the linear regulator. Supplies current up to 230mA.
I
PEAK
I
OCSET
R
OCSET
◊
r
DS ON
(
)
----------------------------------------------------
=
Fs
200kHz
5
10
6
◊
R
T
k
(
)
---------------------
+
(R
T
to GND)
Fs
200kHz
4
10
7
◊
R
T
k
(
)
---------------------
≠
(R
T
to 12V)
HIP6019

2-258
FB4 (Pin 14)
Connect this pin to a resistor divider to set the linear
regulator output.
Description
Operation
The HIP6019 monitors and precisely controls 4 output
voltage levels (Refer to Figures 1, 2, and 3). It is designed for
microprocessor computer applications with 5V power and
12V bias input from a PS2 or ATX power supply. The IC has
2 PWM controllers, a linear controller, and a linear regulator.
The first PWM controller (PWM1) is designed to regulate the
microprocessor core voltage (V
OUT1
). PWM1 controller
drives 2 MOSFETs (Q1 and Q2) in a synchronous-rectified
buck converter configuration and regulates the core voltage
to a level programmed by the 5-bit digital-to-analog
converter (DAC). The second PWM controller (PWM2) is
designed to regulate the I/O voltage (V
OUT2
). PWM2
controller drives a MOSFET (Q3) in a standard buck
converter configuration and regulates the I/O voltage to a
resistor programmable level between 3.0 and 3.5V
DC
. An
integrated linear regulator supplies the 2.5V clock generator
power (V
OUT4
). The linear controller drives an external
MOSFET (Q4) to supply the GTL bus power (V
OUT3
).
Initialization
The HIP6019 automatically initializes upon receipt of input
power. Special sequencing of the input supplies is not
necessary. The Power-On Reset (POR) function continually
monitors the input supply voltages. The POR monitors the
bias voltage (+12V
IN
) at the VCC pin and the 5V input voltage
(+5V
IN
) at the OCSET1 pin. The normal level on OCSET1 is
equal to +5V
IN
less a fixed voltage drop (see over-current
protection). The POR function initiates soft-start operation
after both input supply voltages exceed their POR thresholds.
Soft-Start
The POR function initiates the soft-start sequence. Initially,
the voltage on the SS pin rapidly increases to approximately
1V (this minimizes the soft-start interval). Then an internal
11
µ
A current source charges an external capacitor (C
SS
) on
the SS pin to 4V. The PWM error amplifier reference inputs
(+ terminal) and outputs (COMP1 and COMP2 pins) are
clamped to a level proportional to the SS pin voltage. As the
SS pin voltage ramps from 1V to 4V, the output clamp allows
generation of PHASE pulses of increasing width that charge
the output capacitor(s). After this initial stage, the reference
input clamp slows the output voltage rate-of-rise and
provides a smooth transition to the final set voltage.
Additionally, both linear regulator's reference inputs are
clamped to a voltage proportional to the SS pin voltage. This
method provides a rapid and controlled output voltage rise.
Figure 6 shows the soft-start sequence for the typical
application. At T0 the SS voltage rapidly increases to
approximately 1V. At T1, the SS pin and error amplifier output
voltage reach the valley of the oscillator's triangle wave. The
oscillator's triangular waveform is compared to the clamped
error amplifier output voltage. As the SS pin voltage
increases, the pulse-width on the PHASE pin increases. The
interval of increasing pulse-width continues until each output
reaches sufficient voltage to transfer control to the input
reference clamp. If we consider the 3.3V output (V
OUT2
) in
Figure 6, this time occurs at T2. During the interval between
T2 and T3, the error amplifier reference ramps to the final
value and the converter regulates the output to a voltage
proportional to the SS pin voltage. At T3 the input clamp
voltage exceeds the reference voltage and the output voltage
is in regulation.
The remaining outputs are also programmed to follow the SS
pin voltage. Each linear output (V
OUT3
and V
OUT4
) initially
follows the 3.3V output (V
OUT2
). When each output reaches
sufficient voltage the input reference clamp slows the rate of
output voltage rise. The PGOOD signal toggles `high' when
all output voltage levels have exceeded their under-voltage
levels. See the Soft-Start Interval section under Applications
Guidelines for a procedure to determine the soft-start interval.
Fault Protection
All four outputs are monitored and protected against extreme
overload. A sustained overload on any linear regulator
output or an over-voltage on the PWM outputs disables all
converters and drives the FAULT/RT pin to VCC.
Figure 7 shows a simplified schematic of the fault logic. An
over-voltage detected on either VSEN1 or VSEN2
FIGURE 6. SOFT-START INTERVAL
0V
0V
0V
TIME
PGOOD
SOFT-START
(1V/DIV)
OUTPUT
(0.5V/DIV)
VOLTAGES
V
OUT1
(DAC = 2V)
V
OUT2
(= 3.3V)
V
OUT4
(= 2.5V)
V
OUT3
( = 1.5V)
T1
T2
T3
T0
(2V/DIV)
HIP6019

2-259
immediately sets the fault latch. A sequence of three over-
current fault signals also sets the fault latch. A comparator
indicates when C
SS
is fully charged (UP signal), such that an
under-voltage event on either linear output (FB3 or FB4) is
ignored until after the soft-start interval (approximately T3 in
Figure 6). At start-up, this allows V
OUT3
and V
OUT4
to slew
up over increased time intervals, without generating a fault.
Cycling the bias input voltage (+12V
IN
on the VCC pin) off
then on resets the counter and the fault latch.
Over-Voltage Protection
During operation, a short on the upper MOSFET (Q1)
causes V
OUT1
to increase. When the output exceeds the
over-voltage threshold of 115% of DACOUT, the over-voltage
comparator trips to set the fault latch and turns Q2 on as
required in order to regulate V
OUT1
to 1.15 x DACOUT. This
blows the input fuse and reduces V
OUT1
. The fault latch
raises the FAULT/RT pin close to VCC potential.
A separate over-voltage circuit provides protection during
the initial application of power. For voltages on the VCC pin
below the power-on reset (and above ~4V), V
OUT1
is
monitored for voltages exceeding 1.26V. Should VSEN1
exceed this level, the lower MOSFET (Q2) is driven on, as
needed to regulate V
OUT1
to 1.26V.
Over-Current Protection
All outputs are protected against excessive over-currents.
Both PWM controllers use the upper MOSFET's
on-resistance, r
DS(ON)
to monitor the current for protection
against shorted outputs. The linear regulator monitors the
current of the integrated power device and signals an over-
current condition for currents in excess of 230mA.
Additionally, both the linear regulator and the linear
controller monitor FB3 and FB4 for under-voltage to protect
against excessive currents.
Figures 8 and 9 illustrate the over-current protection with an
overload on OUT2. The overload is applied at T0 and the
current increases through the output inductor (L
OUT2
). At time
T1, the OVER-CURRENT2 comparator trips when the voltage
across Q3 (I
D
∑
r
DS(ON)
) exceeds the level programmed by
R
OCSET
. This inhibits all outputs, discharges the soft-start
capacitor (C
SS
) with a 11
µ
A current sink, and increments the
counter. C
SS
recharges at T2 and initiates a soft-start cycle
with the error amplifiers clamped by soft-start. With OUT2 still
overloaded, the inductor current increases to trip the over-
current comparator. Again, this inhibits all outputs, but the
soft-start voltage continues increasing to 4V before
discharging. The counter increments to 2. The soft-start cycle
repeats at T3 and trips the over-current comparator. The SS
pin voltage increases to 4V at T4 and the counter increments to
3. This sets the fault latch to disable the converter. The fault is
reported on the FAULT/RT pin.
The PWM1 controller and the linear regulator operate in the
same way as PWM2 to over-current faults. Additionally, the
linear regulator and linear controller monitor the feedback
pins for an under-voltage. Should excessive currents cause
FB3 or FB4 to fall below the linear under-voltage threshold,
the LUV signal sets the over-current latch if C
SS
is fully
charged. Blanking the LUV signal during the C
SS
charge
interval allows the linear outputs to build above the under-
voltage threshold during normal start-up. Cycling the bias
input power off then on resets the counter and the fault
latch
.
FAULT
LATCH
S
R
Q
POR
COUNTER
OC1
OV
OC2
LUV
+
-
+
-
0.15V
4V
SS
VCC
FAULT
R
FIGURE 7. FAULT LOGIC - SIMPLIFIED SCHEMATIC
UP
OVER
CURRENT
LATCH
INHIBIT
S
R
Q
S
INDUCT
OR CURRENT
SOFT
-ST
AR
T
0A
0V
2V
4V
FIGURE 8. OVER-CURRENT OPERATION
TIME
T1
T2
T3
T0
T4
F
A
UL
T/R
T
0V
10V
FAULT
REPORTED
COUNT
= 1
COUNT
= 2
COUNT
= 3
OVERLOAD
APPLIED
HIP6019
2-260
Resistors (R
OCSET1
and R
OCSET2
) program the over-
current trip levels for each PWM converter. As shown in
Figure 9, the internal 200
µ
A current sink develops a voltage
across R
OCSET
(V
SET
) that is referenced to V
IN
. The DRIVE
signal enables the over-current comparator (OVER-
CURRENT1 or OVER-CURRENT2). When the voltage
across the upper MOSFET (V
DS
) exceeds V
SET
, the over-
current comparator trips to set the over-current latch. Both
V
SET
and V
DS
are referenced to V
IN
and a small capacitor
across R
OCSET
helps V
OCSET
track the variations of V
IN
due
to MOSFET switching. The over-current function will trip at a
peak inductor current (I
PEAK)
determined by:
The OC trip point varies with MOSFET's temperature. To avoid
over-current tripping in the normal operating load range,
determine the R
OCSET
resistor from the equation above with:
1. The maximum r
DS(ON)
at the highest junction temperature.
2. The minimum I
OCSET
from the specification table.
3. Determine I
PEAK
for I
PEAK
> I
OUT(MAX)
+ (
I)/2,
where
I is the output inductor ripple current.
For an equation for the output inductor ripple current see
the section under component guidelines titled `Output
Inductor Selection'.
OUT1 Voltage Program
The output voltage of the PWM1 converter is programmed to
discrete levels between 1.8V
DC
and 3.5V
DC
. This output is
designed to supply the microprocessor core voltage. The
voltage identification (VID) pins program an internal voltage
reference (DACOUT) through a TTL-compatible 5-bit digital-to-
analog converter. The level of DACOUT also sets the PGOOD
and OVP thresholds. Table 1 specifies the DACOUT voltage for
the different combinations of connections on the VID pins. The
VID pins can be left open for a logic 1 input, because they are
internally pulled up to +5V by a 10
µ
A current source. Changing
the VID inputs during operation is not recommended. The
sudden change in the resulting reference voltage could toggle
the PGOOD signal and exercise the over-voltage protection. All
VID pin combinations resulting in an INHIBIT disable the IC and
the open-collector at the PGOOD pin.
Application Guidelines
Soft-Start Interval
Initially, the soft-start function clamps the error amplifiers'
output of the PWM converters. After the output voltage
increases to approximately 80% of the set value, the
reference input of the error amplifier is clamped to a voltage
proportional to the SS pin voltage. The resulting output
voltage sequence is shown in Figure 6.
The soft-start function controls the output voltage rate of rise
to limit the current surge at start-up. The soft-start interval is
programmed by the soft-start capacitor, C
SS
. Programming
a faster soft-start interval increases the peak surge current.
The peak surge current occurs during the initial output
voltage rise to 80% of the set value.
Shutdown
Neither PWM output switches until the soft-start voltage
(V
SS
) exceeds the oscillator's valley voltage. Additionally, the
reference on each linear's amplifier is clamped to the soft-
start voltage. Holding the SS pin low (with an open drain or
collector signal) turns off all four regulators.
The VID codes resulting in an INHIBIT as shown in Table 1
also shut down the IC.
UGATE
OCSET
PHASE
OVER-
CURRENT2
+
-
GATE
CONTROL
VCC
OC2
200
µ
A
V
DS
I
D
V
SET
R
OCSET
V
IN
= +5V
OVER-CURRENT TRIP: V
DS
> V
SET
(I
D
∑ r
DS(ON)
> I
OCSET
∑ R
OCSET
)
I
OCSET
+
+
FIGURE 9. OVER-CURRENT DETECTION
PWM
V
PHASE
= V
IN
- V
DS
V
OCSET
= V
IN
- V
SET
DRIVE
HIP6019
I
PEAK
=
I
OCSET
R
OCSET
◊
r
DS ON
(
)
----------------------------------------------------
TABLE 1. V
OUT1
VOLTAGE PROGRAM
PIN NAME
NOMINAL
OUT1
VOLTAGE
DACOUT
VID4
VID3
VID2
VID1
VID0
0
1
X
X
X
INHIBIT
0
0
1
1
X
INHIBIT
0
0
1
0
1
1.80
0
0
1
0
0
1.85
0
0
0
1
1
1.90
0
0
0
1
0
1.95
0
0
0
0
1
2.00
0
0
0
0
0
2.05
1
1
1
1
1
INHIBIT
1
1
1
1
0
2.1
1
1
1
0
1
2.2
1
1
1
0
0
2.3
1
1
0
1
1
2.4
1
1
0
1
0
2.5
1
1
0
0
1
2.6
HIP6019
2-261
Layout Considerations
MOSFETs switch very fast and efficiently. The speed with
which the current transitions from one device to another
causes voltage spikes across the interconnecting
impedances and parasitic circuit elements. The voltage
spikes can degrade efficiency, radiate noise into the circuit,
and lead to device over-voltage stress. Careful component
layout and printed circuit design minimizes the voltage
spikes in the converter. Consider, as an example, the turnoff
transition of the upper MOSFET. Prior to turnoff, the upper
MOSFET was carrying the full load current. During the
turnoff, current stops flowing in the upper MOSFET and is
picked up by the lower MOSFET or Schottky diode. Any
inductance in the switched current path generates a large
voltage spike during the switching interval. Careful
component selection, tight layout of the critical components,
and short, wide circuit traces minimize the magnitude of
voltage spikes. Contact Intersil for evaluation board drawings
of the component placement and printed circuit board.
There are two sets of critical components in a DC-DC
converter using a HIP6019 controller. The power
components are the most critical because they switch large
amounts of energy. The critical small signal components
connect to sensitive nodes or supply critical bypassing
current.
The power components should be placed first. Locate the
input capacitors close to the power switches. Minimize the
length of the connections between the input capacitors and
the power switches. Locate the output inductor and output
capacitors between the MOSFETs and the load. Locate the
PWM controller close to the MOSFETs.
The critical small signal components include the bypass
capacitor for VCC and the soft-start capacitor, C
SS
. Locate
these components close to their connecting pins on the
control IC. Minimize any leakage current paths from SS node
because the internal current source is only 11
µ
A.
A multi-layer printed circuit board is recommended. Figure
10 shows the connections of the critical components in the
converter. Note that capacitors C
IN
and C
OUT
could each
represent numerous physical capacitors. Dedicate one solid
layer for a ground plane and make all critical component
ground connections with vias to this layer. Dedicate another
solid layer as a power plane and break this plane into
smaller islands of common voltage levels. The power plane
should support the input power and output power nodes.
Use copper filled polygons on the top and bottom circuit
layers for the phase nodes. Use the remaining printed circuit
layers for small signal wiring. The wiring traces from the
control IC to the MOSFET gate and source should be sized
to carry 1A currents. The traces for OUT4 need only be sized
for 0.2A. Locate C
OUT4
close to the HIP6019 IC.
PWM Controller Feedback Compensation
Both PWM controllers use voltage-mode control for output
regulation. This section highlights the design consideration
for a voltage-mode controller. Apply the methods and
considerations to both PWM controllers.
Figure 11 highlights the voltage-mode control loop for a
synchronous-rectified buck converter. The output voltage is
regulated to the reference voltage level. The reference
voltage level is the DAC output voltage for PWM1 and is
1.265V for PWM2. The error amplifier output (V
E/A
) is
compared with the oscillator (OSC) triangular wave to
provide a pulse-width modulated wave with an amplitude of
V
IN
at the PHASE node. The PWM wave is smoothed by the
output filter (L
O
and C
O
).
1
1
0
0
0
2.7
1
0
1
1
1
2.8
1
0
1
1
0
2.9
1
0
1
0
1
3.0
1
0
1
0
0
3.1
1
0
0
1
1
3.2
1
0
0
1
0
3.3
1
0
0
0
1
3.4
1
0
0
0
0
3.5
NOTE: 0 = connected to GND or V
SS
, 1 = open or connected to 5V
through pull-up resistors, X = don't care.
TABLE 1. V
OUT1
VOLTAGE PROGRAM (Continued)
PIN NAME
NOMINAL
OUT1
VOLTAGE
DACOUT
VID4
VID3
VID2
VID1
VID0
FIGURE 10. PRINTED CIRCUIT BOARD POWER PLANES AND
ISLANDS
V
OUT1
Q1
Q2
Q3
Q4
C
SS
+12V
C
VCC
LO
AD
VIA CONNECTION TO GROUND PLANE
ISLAND ON POWER PLANE LAYER
ISLAND ON CIRCUIT PLANE LAYER
L
OUT1
C
OUT1
CR1
HIP6019
LO
AD
LO
AD
C
IN
C
OUT2
V
OUT2
V
OUT3
+5V
IN
SS
PGND
LGATE1
UGATE1
PHASE1
GATE3
PHASE2
KEY
L
OUT2
GND
VCC
UGATE2
OCSET1
OCSET2
R
OCSET1
R
OCSET2
C
OCSET1
C
OCSET2
HIP6019

2-262
The modulator transfer function is the small-signal transfer
function of V
OUT
/V
E/A
. This function is dominated by a DC
gain and the output filter, with a double pole break frequency
at F
LC
and a zero at F
ESR
. The DC gain of the modulator is
simply the input voltage, V
IN
, divided by the peak-to-peak
oscillator voltage,
V
OSC
.
Modulator Break Frequency Equations
The compensation network consists of the error amplifier
internal to the HIP6019 and the impedance networks Z
IN
and Z
FB
. The goal of the compensation network is to
provide a closed loop transfer function with an acceptable
0dB crossing frequency (f
0dB
) and adequate phase margin.
Phase margin is the difference between the closed loop
phase at f
0dB
and 180 degrees
.
The equations below relate
the compensation network's poles, zeros and gain to the
components (R1, R2, R3, C1, C2, and C3) in Figure 11.
Use these guidelines for locating the poles and zeros of the
compensation network:
1. Pick Gain (R2/R1) for desired converter bandwidth.
2. Place 1
ST
Zero below filter's Double Pole (~75% F
LC
).
3. Place 2
ND
Zero at filter's Double Pole.
4. Place 1
ST
Pole at the ESR Zero.
5. Place 2
ND
Pole at half the switching frequency.
6. Check Gain against Error Amplifier's Open-Loop Gain.
7. Estimate Phase Margin - repeat if necessary.
Compensation Break Frequency Equations
Figure 12 shows an asymptotic plot of the DC-DC
converter's gain vs frequency. The actual modulator gain has
a peak due to the high Q factor of the output filter at F
LC
,
which is not shown in Figure 12. Using the above guidelines
should yield a compensation gain similar to the curve
plotted. The open loop error amplifier gain bounds the
compensation gain. Check the compensation gain at F
P2
with the capabilities of the error amplifier. The closed loop
gain is constructed on the log-log graph of Figure 12 by
adding the modulator gain (in dB) to the compensation gain
(in dB). This is equivalent to multiplying the modulator
transfer function to the compensation transfer function and
plotting the gain.
The compensation gain uses external impedance networks
Z
FB
and Z
IN
to provide a stable, high bandwidth loop. A
stable control loop has a 0dB gain crossing with
-20dB/decade slope and a phase margin greater than 45
degrees. Include worst case component variations when
determining phase margin.
Oscillator Synchronization
The PWM controllers use a triangle wave for comparison with
the error amplifier output to provide a pulse-width modulated
wave. Should the output voltages of the two PWM converters
be programmed close to each other, then cross-talk could
cause nonuniform PHASE pulse-widths and increased output
voltage ripple. The HIP6019 avoids this problem by
synchronizing the two converters 180
∞
out-of-phase for DAC
FIGURE 11. VOLTAGE-MODE BUCK CONVERTER COMPEN-
SATION DESIGN
V
OUT
OSC
REFERENCE
L
O
C
O
ESR
V
IN
V
OSC
ERROR
AMP
PWM
DRIVER
(PARASITIC)
Z
FB
+
-
REFERENCE
R1
R3
R2
C3
C2
C1
COMP
V
OUT
FB
Z
FB
HIP6019
Z
IN
COMP
DRIVER
DETAILED FEEDBACK COMPENSATION
PHASE
V
E/A
+
-
+
-
Z
IN
F
LC
1
2
L
O
C
O
◊
◊
----------------------------------------
=
F
ESR
1
2
ESR
C
O
◊
◊
-----------------------------------------
=
F
Z1
1
2
R
◊
2
C1
◊
-----------------------------------
=
F
Z2
1
2
R1
R3
+
(
)
C3
◊
◊
-------------------------------------------------------
=
F
P1
1
2
R
2
C1
C2
◊
C1
C2
+
----------------------
◊
◊
-------------------------------------------------------
=
F
P2
1
2
R
◊
3
C3
◊
-----------------------------------
=
100
80
60
40
20
0
-20
-40
-60
F
P1
F
Z2
10M
1M
100K
10K
1K
100
10
OPEN LOOP
ERROR AMP GAIN
F
Z1
F
P2
20LOG
F
LC
F
ESR
COMPENSATION
GAIN (dB)
FREQUENCY (Hz)
GAIN
20LOG
(V
IN
/
V
OSC
)
MODULATOR
GAIN
(R
2
/R
1
)
FIGURE 12. ASYMPTOTIC BODE PLOT OF CONVERTER GAIN
CLOSED LOOP
GAIN
HIP6019
2-263
settings above, and including 2.5V. This is accomplished by
inverting the triangle wave sent to PWM 2.
Component Selection Guidelines
Output Capacitor Selection
The output capacitors for each output have unique
requirements. In general the output capacitors should be
selected to meet the dynamic regulation requirements.
Additionally, the PWM converters require an output capacitor
to filter the current ripple. The linear regulator is internally
compensated and requires an output capacitor that meets
the stability requirements. The load transient for the
microprocessor core requires high quality capacitors to
supply the high slew rate (di/dt) current demands.
PWM Output Capacitors
Modern microprocessors produce transient load rates above
10A/ns. High frequency capacitors initially supply the transient
and slow the current load rate seen by the bulk capacitors.
The bulk filter capacitor values are generally determined by
the ESR (effective series resistance) and ESL (effective series
inductance) parameters rather than actual capacitance.
High frequency decoupling capacitors should be placed as
close to the power pins of the load as physically possible. Be
careful not to add inductance in the circuit board wiring that
could cancel the usefulness of these low inductance
components. Consult with the manufacturer of the load on
specific decoupling requirements.
Use only specialized low-ESR capacitors intended for
switching regulator applications for the bulk capacitors. The
bulk capacitor's ESR determines the output ripple voltage and
the initial voltage drop after a high slew-rate transient. An
aluminum electrolytic capacitor's ESR value is related to the
case size with lower ESR available in larger case sizes.
However, the equivalent series inductance of these capacitors
increases with case size and can reduce the usefulness of the
capacitor to high slew-rate transient loading. Unfortunately,
ESL is not a specified parameter. Work with your capacitor
supplier and measure the capacitor's impedance with
frequency to select suitable components. In most cases,
multiple electrolytic capacitors of small case size perform
better than a single large case capacitor. For a given transient
load magnitude, the output voltage transient response due to
the output capacitor characteristics can be approximated by
the following equation:
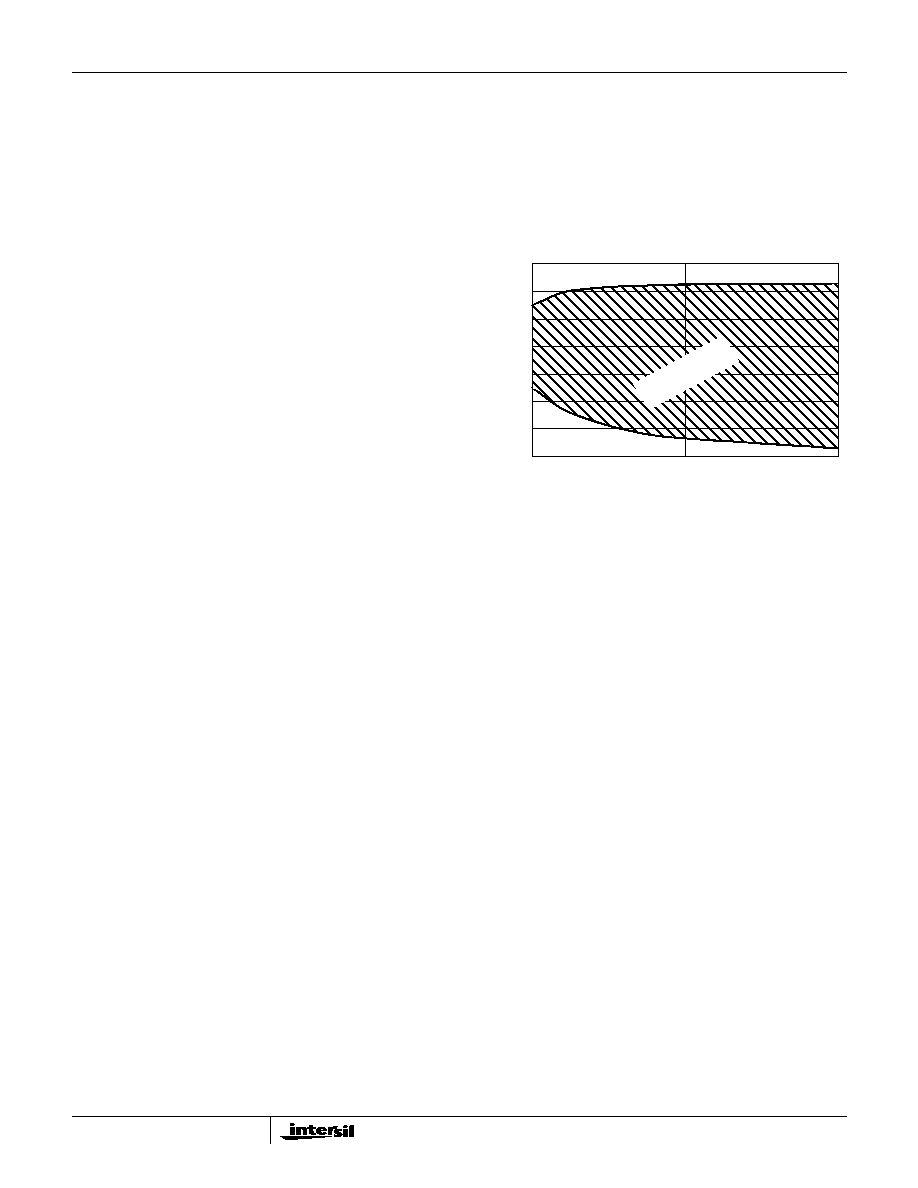
Linear Output Capacitors
The output capacitors for the linear regulator and the linear
controller provide dynamic load current. The linear controller
uses dominant pole compensation integrated in the error
amplifier and is insensitive to output capacitor selection.
Capacitor, C
OUT3
should be selected for transient load
regulation.
The output capacitor for the linear regulator provides loop
stability. The linear regulator (OUT4) requires an output
capacitor characteristic shown in Figure 13 The upper line
plots the 45 phase margin with 150mA load and the lower
line is the 45 phase margin limit with a 10mA load. Select a
C
OUT4
capacitor with characteristic between the two limits.
Output Inductor Selection
Each PWM converter requires an output inductor. The
output inductor is selected to meet the output voltage ripple
requirements and sets the converter's response time to a
load transient. The inductor value determines the converter's
ripple current and the ripple voltage is a function of the ripple
current. The ripple voltage and current are approximated by
the following equations:
Increasing the value of inductance reduces the ripple current
and voltage. However, the large inductance values reduce
the converter's response time to a load transient.
One of the parameters limiting the converter's response to a
load transient is the time required to change the inductor
current. Given a sufficiently fast control loop design, the
HIP6019 will provide either 0% or 100% duty cycle in response
to a load transient. The response time is the time interval
required to slew the inductor current from an initial current value
to the post-transient current level. During this interval the
difference between the inductor current and the transient
current level must be supplied by the output capacitors.
Minimizing the response time can minimize the output
capacitance required.
The response time to a transient is different for the
application of load and the removal of load. The following
V
TRAN
ESL
dI
TRAN
dt
---------------------
◊
ESR
I
TRAN
◊
+
=
10
1000
100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
CAPACITANCE (
µ
F)
ESR (
)
FIGURE 13. C
OUT4
OUTPUT CAPACITOR
ST
ABLE
OPERA
TION
I
V
IN
V
OUT
≠
F
S
L
O
◊
--------------------------------
V
OUT
V
IN
----------------
◊
=
V
OUT
I
ESR
◊
=
HIP6019
2-264
equations give the approximate response time interval for
application and removal of a transient load:
where: I
TRAN
is the transient load current step, t
RISE
is the
response time to the application of load, and t
FALL
is the
response time to the removal of load. With a +5V input source,
the worst case response time can be either at the application or
removal of load and dependent upon the output voltage setting.
Be sure to check both of these equations at the minimum and
maximum output levels for the worst case response time.
Input Capacitor Selection
The important parameters for the bulk input capacitor are the
voltage rating and the RMS current rating. For reliable
operation, select the bulk capacitor with voltage and current
ratings above the maximum input voltage and largest RMS
current required by the circuit. The capacitor voltage rating
should be at least 1.25 times greater than the maximum
input voltage and a voltage rating of 1.5 times is a
conservative guideline.
Use a mix of input bypass capacitors to control the voltage
overshoot across the MOSFETs. Use ceramic capacitance
for the high frequency decoupling and bulk capacitors to
supply the RMS current. Small ceramic capacitors should be
placed very close to the upper MOSFET to suppress the
voltage induced in the parasitic circuit impedances.
For a through hole design, several electrolytic capacitors
(Panasonic HFQ series or Nichicon PL series or Sanyo MV-
GX or equivalent) may be needed. For surface mount
designs, solid tantalum capacitors can be used, but caution
must be exercised with regard to the capacitor surge current
rating. These capacitors must be capable of handling the
surge-current at power-up. The TPS series available from
AVX, and the 593D series from Sprague are both surge
current tested.
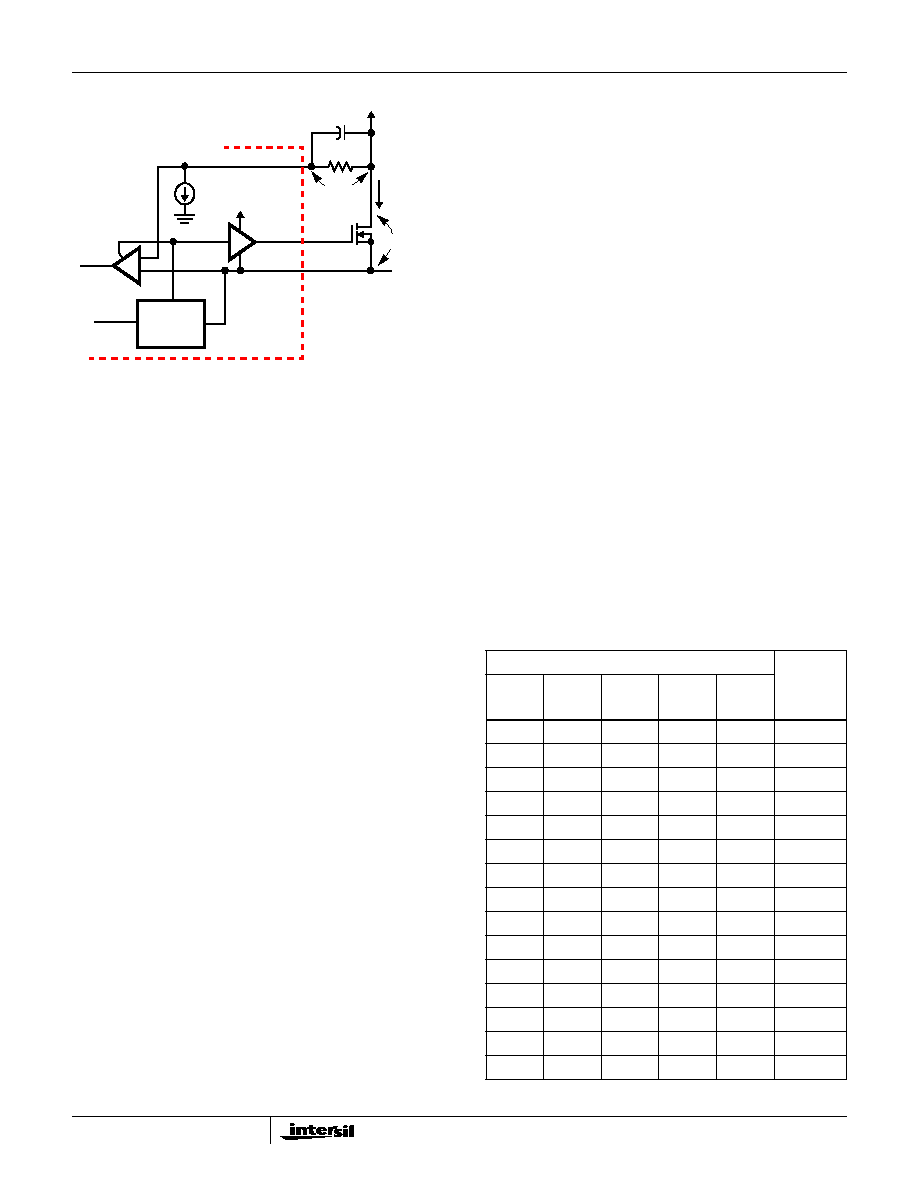
MOSFET Selection/Considerations
The HIP6019 requires 4 N-Channel power MOSFETs. Two
MOSFETs are used in the synchronous-rectified buck
topology of PWM1 converter. PWM2 converter uses a
MOSFET as the buck switch and the linear controller drives
a MOSFET as a pass transistor. These should be selected
based upon r
DS(ON)
, gate supply requirements, and thermal
management requirements.
PWM1 MOSFET Selection and Considerations
In high-current PWM applications, the MOSFET power
dissipation, package selection and heatsink are the
dominant design factors. The power dissipation includes two
loss components; conduction loss and switching loss. These
losses are distributed between the upper and lower
MOSFETs according to duty factor (see the equations
below). The conduction losses are the only component of
power dissipation for the lower MOSFETs. Only the upper
MOSFET has switching losses, since the lower device turns
on into near zero voltage.
The equations below assume linear voltage-current
transitions and do not model power loss due to the reverse-
recovery of the lower MOSFET's body diode. The gate-
charge losses are proportional to the switching frequency
(F
S
) and are dissipated by the HIP6019, thus not
contributing to the MOSFETs' temperature rise. However,
large gate charge increases the switching interval, t
SW
which increases the upper MOSFET switching losses.
Ensure that both MOSFETs are within their maximum
junction temperature at high ambient temperature by
calculating the temperature rise according to package
thermal resistance specifications. A separate heatsink may
be necessary depending upon MOSFET power, package
type, ambient temperature and air flow.
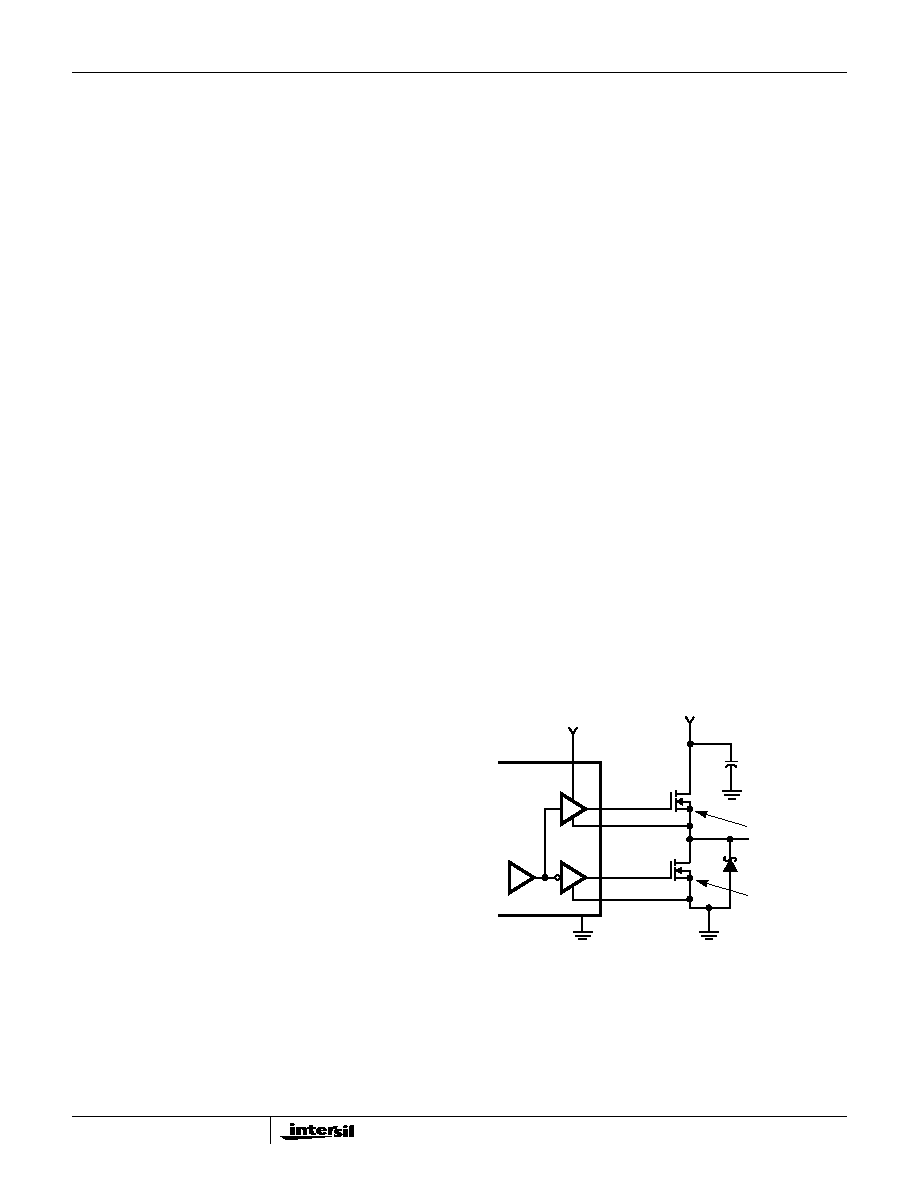
The r
DS(ON)
is different for the two previous equations even
if the type device is used for both. This is because the gate
drive applied to the upper MOSFET is different than the
lower MOSFET. Figure 14 shows the gate drive where the
upper gate-to-source voltage is approximately V
CC
less the
input supply. For +5V main power and +12V
DC
for the bias,
the gate-to-source voltage of Q1 is 7V. The lower gate drive
voltage is +12V
DC
. A logic-level MOSFET is a good choice
for Q1 and a logic-level MOSFET can be used for Q2 if its
absolute gate-to-source voltage rating exceeds the
maximum voltage applied to V
CC
.
Rectifier CR1 is a clamp that catches the negative inductor
swing during the dead time between the turn off of the
lower MOSFET and the turn on of the upper MOSFET. The
diode must be a Schottky type to prevent the lossy parasitic
MOSFET body diode from conducting. It is acceptable to
t
RISE
L
O
I
TRAN
◊
V
IN
V
OUT
≠
--------------------------------
=
t
FALL
L
O
I
TRAN
◊
V
OUT
-------------------------------
=
P
UPPER
I
O
2
r
DS ON
(
)
◊
V
OUT
◊
V
IN
------------------------------------------------------------
I
O
V
IN
◊
t
SW
◊
F
S
◊
2
----------------------------------------------------
+
=
P
LOWER
I
O
2
r
DS ON
(
)
◊
V
IN
V
OUT
≠
(
)
◊
V
IN
---------------------------------------------------------------------------------
=
+12V
PGND
HIP6019
GND
LGATE
UGATE
PHASE
V
CC
+5V OR LESS
NOTE:
NOTE:
V
GS
V
CC
Q1
Q2
+
-
FIGURE 14. OUTPUT GATE DRIVERS
V
GS
V
CC
-5V
CR1
HIP6019

2-265
omit the diode and let the body diode of the lower MOSFET
clamp the negative inductor swing, but efficiency might drop
one or two percent as a result. The diode's rated reverse
breakdown voltage must be greater than twice the maximum
input voltage.
PWM2 MOSFET and Schottky Selection
The power dissipation in PWM2 converter power devices is
similar to PWM1 except that the power losses of the lower
device are representative of a Schottky diode instead of a
MOSFET. The transistor power losses follow the PWM1
upper MOSFET equation, so the selection process should
be somewhat similar. The equation below describes the
conduction power losses incurred by the Schottky diode.
As it can be observed, conduction losses in the Schottky
diode are proportional with the forward voltage drop (V
f
).
Linear Controller MOSFET Selection
The main criteria for selection of MOSFET for the linear
regulator is package selection for efficient removal of heat.
The power dissipated in a linear regulator is:
Select a package and heatsink that maintains the junction
temperature below the maximum rating while operating at
the highest expected ambient temperature.
P
SCH
I
O
V
f
◊
V
IN
V
OUT
≠
(
)
◊
V
IN
-------------------------------------------------------------
=
P
LINEAR
I
O
V
IN
V
OUT
≠
(
)
◊
=
HIP6019

2-266
All Intersil semiconductor products are manufactured, assembled and tested under ISO9000 quality systems certification.
Intersil semiconductor products are sold by description only. Intersil Corporation reserves the right to make changes in circuit design and/or specifications at any time with-
out notice. Accordingly, the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be accurate and
reliable. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may result
from its use. No license is granted by implication or otherwise under any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see web site http://www.intersil.com
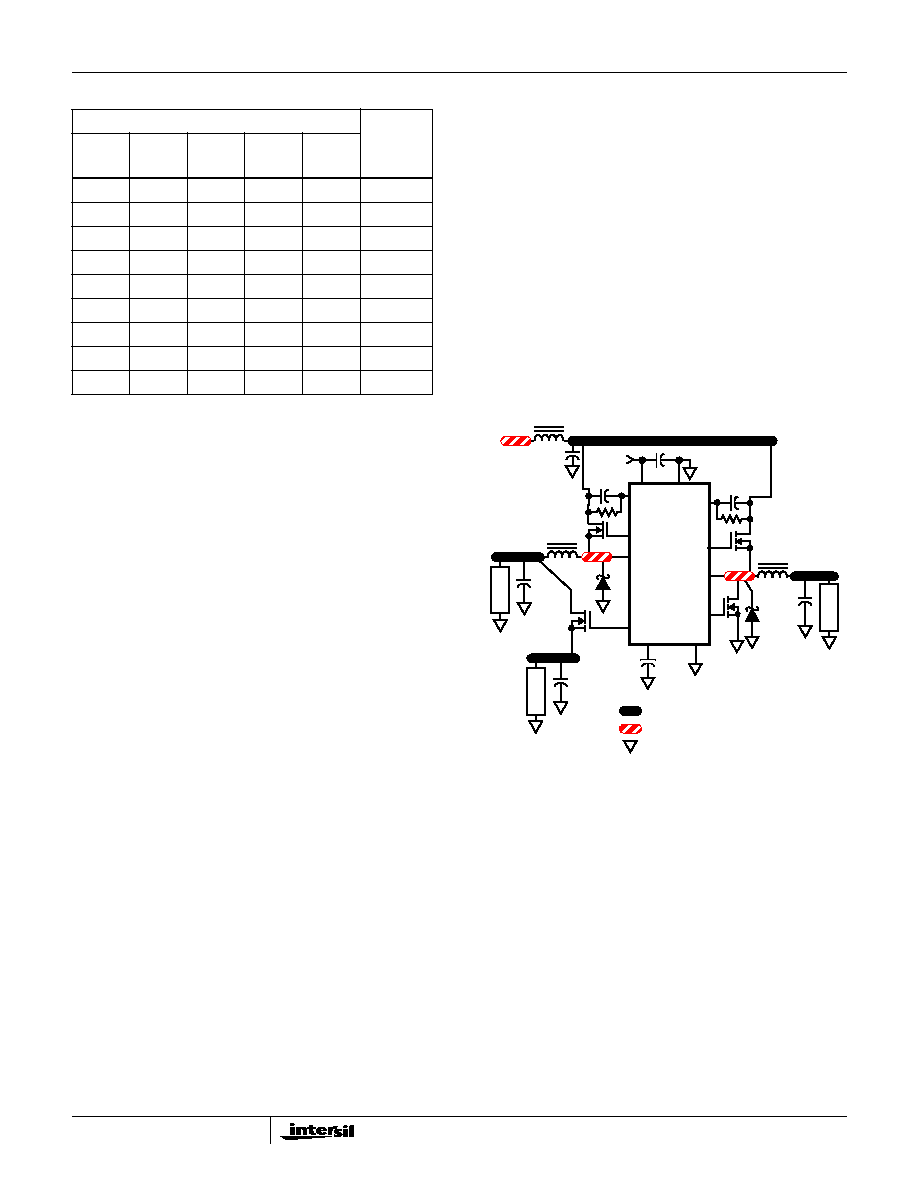
HIP6019 DC-DC Converter Application Circuit
Figure 15 shows an application circuit of a power supply for
a microprocessor computer system. The power supply
provides the microprocessor core voltage (V
OUT1
), the I/O
voltage (V
OUT2
), the GTL bus voltage (V
OUT3
) and clock
generator voltage (V
OUT4
) from +5V
DC
and +12V
DC
. For
detailed information on the circuit, including a Bill-of-
Materials and circuit board description, see Application Note
AN9800. Also see Intersil's web page
(http://www.intersil.com) or Intersil AnswerFAX
(407-724-7800) document # 99800 for the latest information.
VID1
VID2
VID3
VID4
SS
GND
VCC
+5V
IN
VID0
+12V
IN
PGND
VSEN1
PGOOD
LGATE1
UGATE1
OCSET1
PHASE1
Q1
Q2
POWERGOOD
FB1
COMP1
V
OUT2
VSEN2
UGATE2
OCSET2
PHASE2
Q3
CR2
FB2
COMP2
GATE3
FB3
VOUT4
FB4
C47
V
OUT3
V
OUT4
C43-46
C24-36
HIP6019
Q4
L3
+
+
+
+
+
C16
L1
F1
C1-4
C14-15
C18
R2
V
OUT1
R4
R8
C40
C41
C42
R10
R9
C48
R11
R12
R13
R14
270
µ
F
4x1000
µ
F
MBR2535CTL
C19-23
5x1000
µ
F
L2
R3
HUF76137S3S
C37
R5
C38
R7
C39
1
µ
H
4x1000
µ
F
1
µ
F
2x1
µ
F
C17
1000pF
R1
1000pF
HUF76139S3S
HUF76139S3S
7x1000
µ
F
0.039
µ
F
1.21K
1.21K
0.1
µ
F
10pF
0.68
µ
F
4.99K
3.32K
220K
5.2
µ
H
2.9
µ
H
0.68
µ
F
10pF
0.01
µ
F
4.99K
2.21K
150K
732K
GND
1.87K
10K
10K
10K
HUF75307D3S
R6
5.11K
R21
VID1
VID2
VID3
VID4
VID0
(1.8 TO 3.5V)
(3.3V)
(GTL = 1.5V)
(2.5V)
30A
FAULT/RT
9
1
2
15
10
11
18
19
16
14
13
28
23
8
27
26
25
24
22
21
20
7
6
5
4
3
12
17
FIGURE 15. APPLICATION CIRCUIT
HIP6019