1
Æ
FN8202.0
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
1-888-INTERSIL or 321-724-7143
|
Intersil (and design) is a registered trademark of Intersil Americas Inc.
XDCP is a trademark of Intersil Americas Inc. Copyright Intersil Americas Inc. 2004. All Rights Reserved
All other trademarks mentioned are the property of their respective owners.
X9455
Dual Two-wiper Digitally-Controlled
(XDCPTM) Potentiometer
The X9455 integrates 2 digitally controlled potentiometers
(XDCP), each one with dual wipers, on a monolithic CMOS
integrated circuit.
The digitally controlled potentiometer is implemented using
255 resistive elements in a series array. Between each
element are tap points connected to wiper terminals through
switches. The position of each wiper on the array is
controlled by the user through the U/D or 2-wire bus
interface. Each potentiometer wiper has associated with it
two volatile Wiper Counter Register (WCR) and each WCR
has associated with it four non-volatile Data Registers that
can be directly written to and read by the user. The contents
of the WCR controls the position of the wiper on the resistor
array though the switches. The contents of the default data
registers (DR0A0, DR0B0, DR1A0, DR1B0) are loaded into
the WCR on power up.
The DCP can be used as a four-terminal potentiometer in a
wide variety of applications including the programming of
bias voltages, window comparators, and three resistor
programmable networks.
Features
∑ Dual Two-wiper solid state potentiometer
∑ 256 Resistor tap points-0.4% resolution
∑ 2-wire serial interface for Write, Read, and
transfer operations of the potentiometer
∑ Up/Down interface for individual potentiometer wipers
∑ Wiper resistance, 40
typical
∑ Non-volatile storage of wiper positions
∑ Power On Recall Loads saved wiper position on Power
Up.
∑ Standby Current < 20µA Max
∑ Maximum Wiper Current: 3mA
∑ V
CC
: 2.7V to 5.5V operation
∑ 2.8k
,10k, 50k, 100k version of total pot resistance
∑ Endurance: 100,000 Data changes per bit per register
∑ 100 yr. data retention
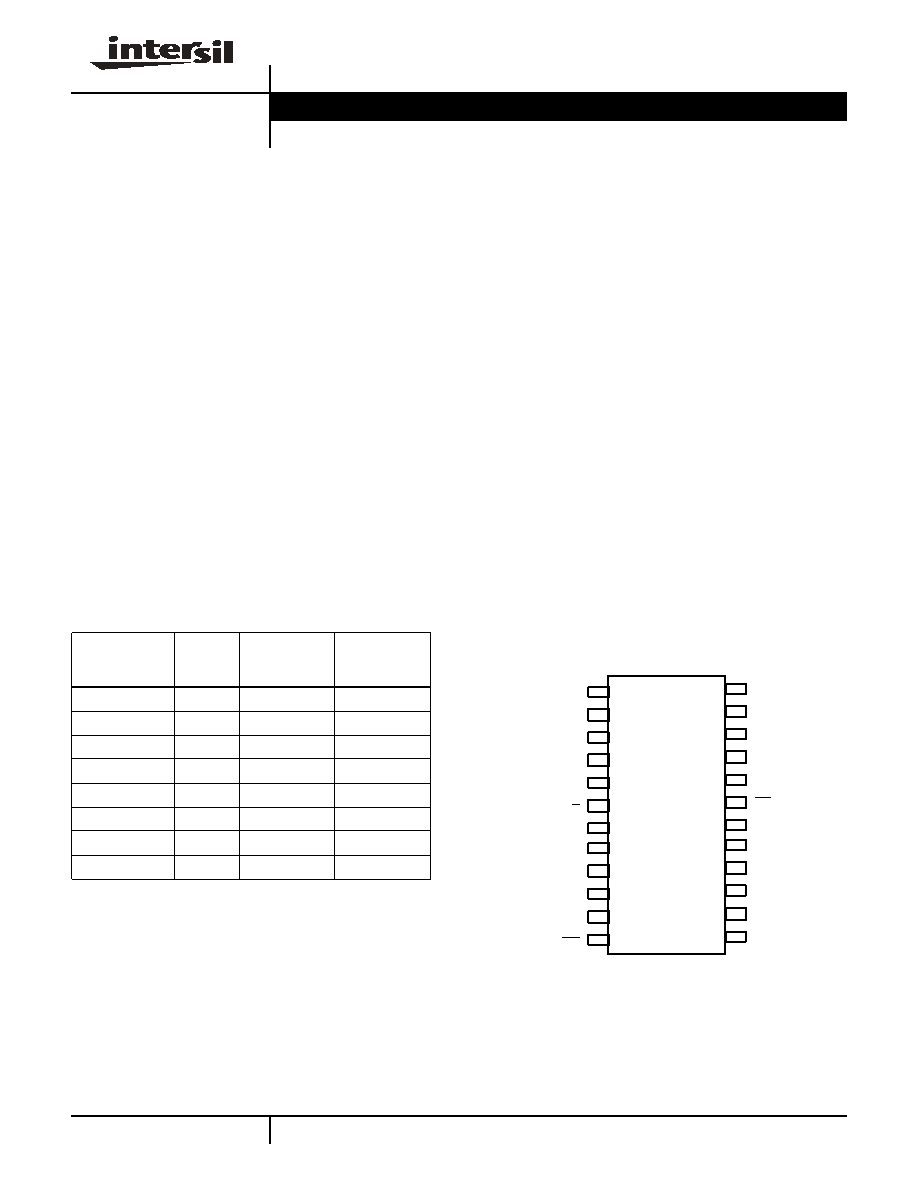
∑ 24-Lead TSSOP
Pinout
X9455
(24-LD TSSOP)
TOP VIEW
Ordering Information
PART NUMBER
RTOTAL
PACKAGE
OPERATING
TEMP RANGE
(∞C)
X9455YV24-2.7
2.8k
24-lead TSSOP
0 to 70
X9455YV24I-2.7
2.8k
24-lead TSSOP
-40 to +85
X9455WV24-2.7
10k
24-lead TSSOP
0 to 70
X9455WV24I-2.7
10k
24-lead TSSOP
-40 to +85
X9455UV24-2.7
50k
24-lead TSSOP
0 to 70
X9455UV24I-2.7
50k
24-lead TSSOP
-40 to +85
X9455TV24-2.7
100k
24-lead TSSOP
0 to 70
X9455TV24I-2.7
100k
24-lead TSSOP
-40 to +85
RH1
NC
RW1A
1
2
3
4
5
6
7
14
20
19
18
17
16
15
X9455
DS0
DS1
A0
RW0B
U/D
NC
SCL
RL1
Vss
NC
RW0A
CS
RH0
RL0
RW1B
NC
Vcc
8
9
10
13
WP
A2
11
12
SDA
A1
24
23
22
21
Data Sheet
November 10, 2004

2
FN8202.0
November 10, 2004
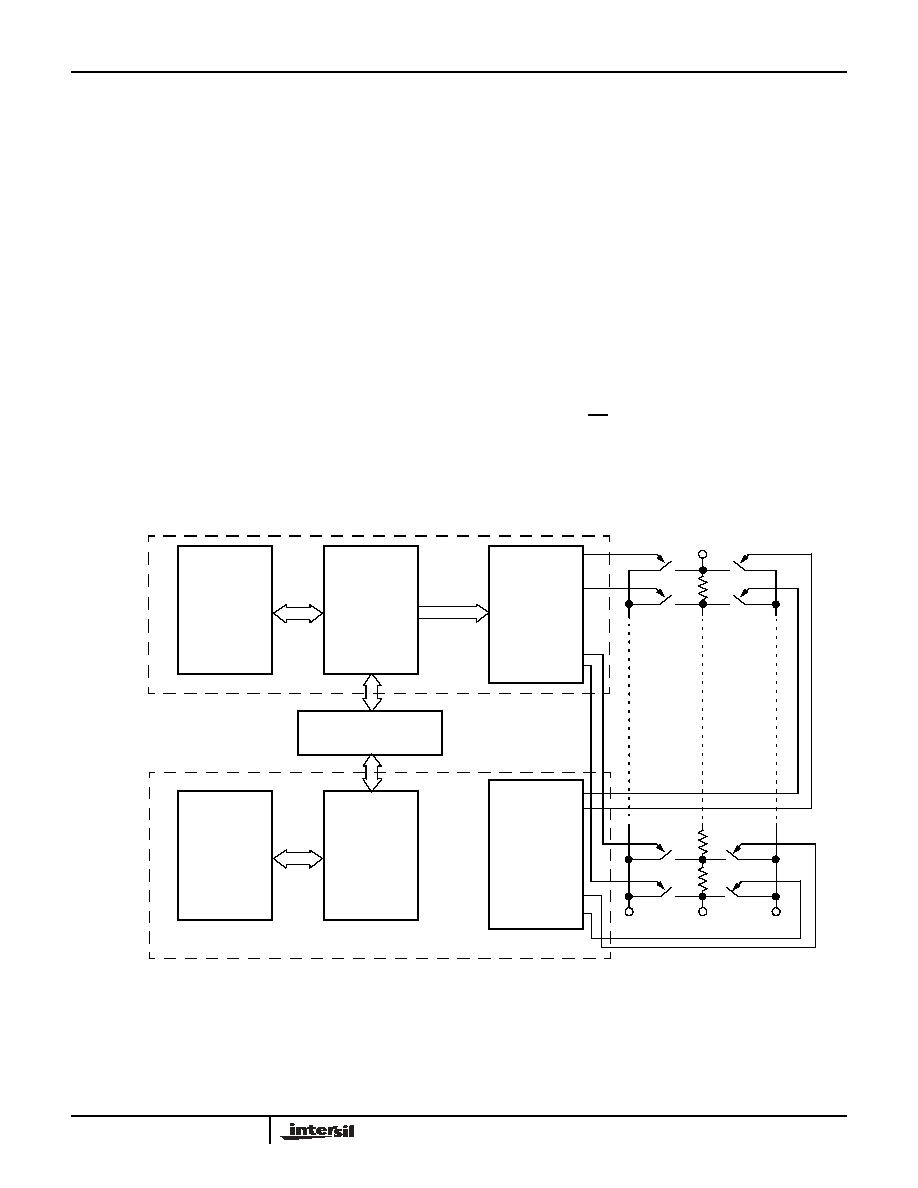
Functional Diagram
V
CC
V
SS
2-wire
R
W0A
A0
A1
SDA
SCL
CS
U/D
A2
DS0
DS1
WP
WCR0A
DR0A0
DR0A1
DR0A2
DR0A3
R
H0
R
L0
DCP0
WCR0B
DR0B0
DR0B1
DR0B2
DR0B3
R
W0B
R
W1A
WCR1A
DR1A0
DR1A1
DR1A2
DR1A3
R
H1
R
L1
DCP1
WCR1B
DR1B1
DR1B2
DR1B3
R
W1B
POWERUP,
INTERFACE
CONTROL AND
STATUS
Interface
Up/Down
Interface
DR1B0
Pin Descriptions
TSSOP PIN
SYMBOL
BRIEF DESCRIPTION
1
DS0
Wiper Selection input for Up/Down interface
2
A0
Device Address for 2-wire interface
3
RW0B
Second Wiper Terminal of DCP0
4
NC
No Connect
5
NC
No Connect
6
U/D
Increment/Decrement for Up/Down interface
7
VCC
System Supply Voltage
8
RL0
Low Terminal of DCP0
9
RH0
High Terminal of DCP0
10
RW0A
First Wiper Terminal of the DCP0
11
A2
Device Address for 2-wire interface
12
WP
Hardware Write Protect (Active low)
13
SDA
Serial Data Input/Output for 2-wire interface
14
A1
Device Address for 2-wire interface
15
NC
No Connect
16
NC
No Connect
17
RW1B
Second Wiper Terminal of DCP1
18
VSS
System Ground
19
CS
Chip select for Up/Down interface
20
RW1A
First Wiper Terminal of DCP1
21
RH1
High Terminal of DCP1
22
RL1
Low Terminal of DCP1
23
SCL
Serial Clock for 2-wire interface
24
DS1
Wiper selection input for Up/Down interface
X9455
3
FN8202.0
November 10, 2004
Absolute Maximum Ratings
Recommended Operating Conditions
Junction Temperature under bias. . . . . . . . . . . . . . .-65
∞C to +135∞C
Storage temperature . . . . . . . . . . . . . . . . . . . . . . . .-65
∞C to +150∞C
Voltage at any digital interface pin
with respect to V
SS
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . -1V to +7V
V
CC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -1V to +7V
Voltage at any DCP pin with
respect to V
SS
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -1V to V
CC
Lead temperature (soldering, 10 seconds) . . . . . . . . . . . . . . . 300
∞C
I
W
(10 seconds) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ±6mA
Commercial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0∞C to +70∞C
Industrial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .-40∞C to +85∞C
Supply Voltage (V
CC
) (Note 4) Limits . . . . . . . . . . . . . . 2.7V to 5.5V
CAUTION: Stresses above those listed under "Absolute Maximum Ratings" may cause permanent damage to the device. This is a stress rating only; functional operation
of the device (at these or any other conditions above those listed in the operational sections of this specification) is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
Analog Specifications
Over recommended operating conditions unless otherwise stated.
SYMBOL
PARAMETER
TEST CONDITIONS
MIN
TYP
(Note 4)
MAX
UNIT
R
TOTAL
End to end resistance
Y, W, U, T versions respectively
2.8, 10, 50,
100
k
End to end resistance tolerance
-20
+20
%
Power rating
25∞C, each DCP
50
mW
R
TOTAL
Matching
DCP to DCP resistance matching
0.75
2.0
%
I
W
(Note 5)
Wiper current
See test circuit
-3.0
+3.0
mA
R
W
Wiper resistance
Wiper current =
50
150
V
TERM
Voltage on any DCP pin
Vss
Vcc
V
Noise (Note 5)
Ref: 1kHz
-120
dBV
Resolution
0.4
%
Absolute linearity (Note 1)
V(R
H0
)=V(R
H1
)=V
CC
V(R
L0
)=V(R
L1
)=V
SS
-1
+1
MI (Note 3)
Relative linearity
(Note 2)
-0.3
+0.3
MI (Note 3)
Temperature coefficient of resistance
(Note 5)
±300
ppm/
∞C
Ratiometric Temperature (Note 5)
Coefficient
-20
+20
ppm/∞C
C
H
/C
L
/C
W
Potentiometer Capacitance (Note 5)
See equivalent circuit
10/10/25
pF
I
OL
Leakage on DCP pins
Voltage at pin from V
SS
to V
CC
0.1
10
µA
V
CC
R
TOTAL
DC Electrical Specifications
Over the recommended operating conditions unless otherwise specified.
SYMBOL
PARAMETER
TEST CONDITIONS
MIN
MAX
UNITS
I
CC1
V
CC
supply current (Volatile write/read)
f
SCL
= 400kHz; SDA = Open; (for 2-Wire, Active,
Read and Volatile Write States only)
3
mA
I
CC2
V
CC
supply current (active)
f
SCL
= 200kHz; (for U/D interface, increment,
decrement)
3
mA
I
CC3
V
CC
supply current (nonvolatile write)
f
SCL
= 400kHz; SDA = Open;
(for 2-Wire, Active, Nonvolatile Write State only)
5
mA
I
SB
V
CC
current (standby)
V
CC
= +5.5V; V
IN
= V
SS
or V
CC
; SDA = V
CC
;
(for 2-Wire, Standby State only)
20
µA
I
L
Leakage current, bus interface pins
Voltage at pin from V
SS
to V
CC
-10
10
µA
X9455
4
FN8202.0
November 10, 2004
V
IH
Input HIGH voltage
V
CC
x 0.7
V
CC
+ 1
V
V
IL
Input LOW voltage
-1
V
CC
x 0.3
V
V
OL
SDA pin output LOW voltage
I
OL
= 3mA
0.4
V
DC Electrical Specifications
Over the recommended operating conditions unless otherwise specified. (Continued)
SYMBOL
PARAMETER
TEST CONDITIONS
MIN
MAX
UNITS
Endurance and Data Retention
PARAMETER
MIN
UNITS
Minimum endurance
100,000
Data changes per bit
Data retention
100
Years
Capacitance
SYMBOL
TEST
TEST CONDITIONS
MAX
UNITS
C
IN/OUT
(Note 5) Input / Output capacitance (SDA)
V
OUT
= 0V
8
pF
C
IN
(Note 5)
Input capacitance (DS0, DS1, CS, U/D,
SCL, WP, A2, A1
and A0
)
V
IN
= 0V
6
pF
Power-Up Timing
SYMBOL
PARAMETER MAX
UNITS
t
D
(Notes 5, 9)
Power Up Delay from V
CC
power up (V
CC
above 2.7V) to wiper position recall
completed, and communication interfaces ready for operation.
2
ms
A.C. Test Conditions
Input Pulse Levels
V
CC
x 0.1 to V
CC
x 0.9
Input rise and fall times
10ns
Input and output timing threshold level
V
CC
x 0.5
External load at pin SDA
2.3k
to V
CC
and 100 pF to V
SS
2-Wire Interface Timing (s)
SYMBOL
PARAMETER
MIN
MAX
UNITS
f
SCL
Clock Frequency
400
kHz
t
HIGH
Clock High Time
600
ns
t
LOW
Clock Low Time
1300
ns
t
SU:STA
Start Condition Setup Time
600
ns
t
HD:STA
Start Condition Hold Time
600
ns
t
SU:STO
Stop Condition Setup Time
600
ns
t
SU:DAT
SDA Data Input Setup Time
100
ns
t
HD:DAT
SDA Data Input Hold Time
30
ns
t
R
(Note 5)
SCL and SDA Rise Time
300
ns
t
F
(Note 5)
SCL and SDA Fall Time
300
ns
t
AA
(Note 5)
SCL Low to SDA Data Output Valid Time
0.9
µs
t
DH
SDA Data Output Hold Time
0
ns
t
IN
(Note 5)
Pulse Width Suppression Time at SCL and SDA inputs
50
ns
t
BUF
(Note 5) Bus Free Time (Prior to Any Transmission)
1200
ns
X9455

5
FN8202.0
November 10, 2004
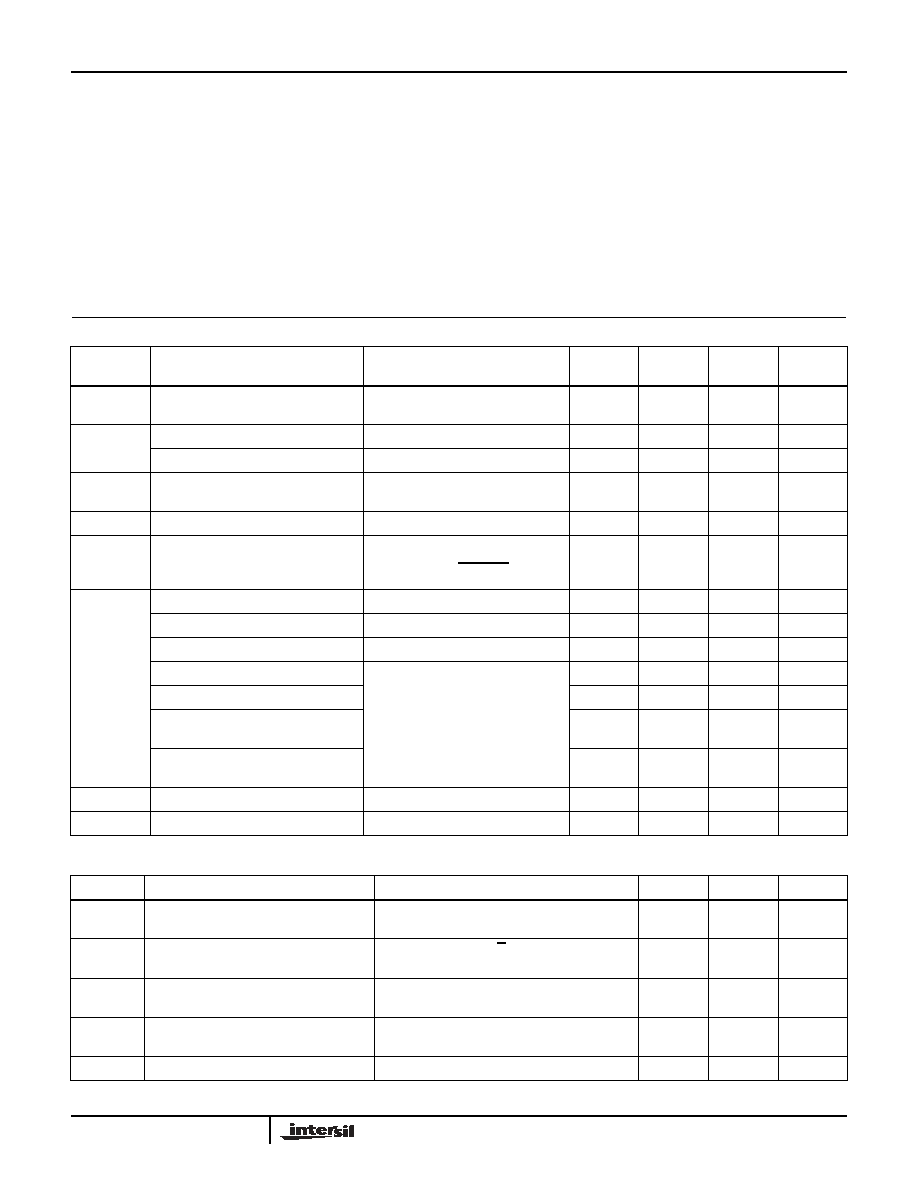
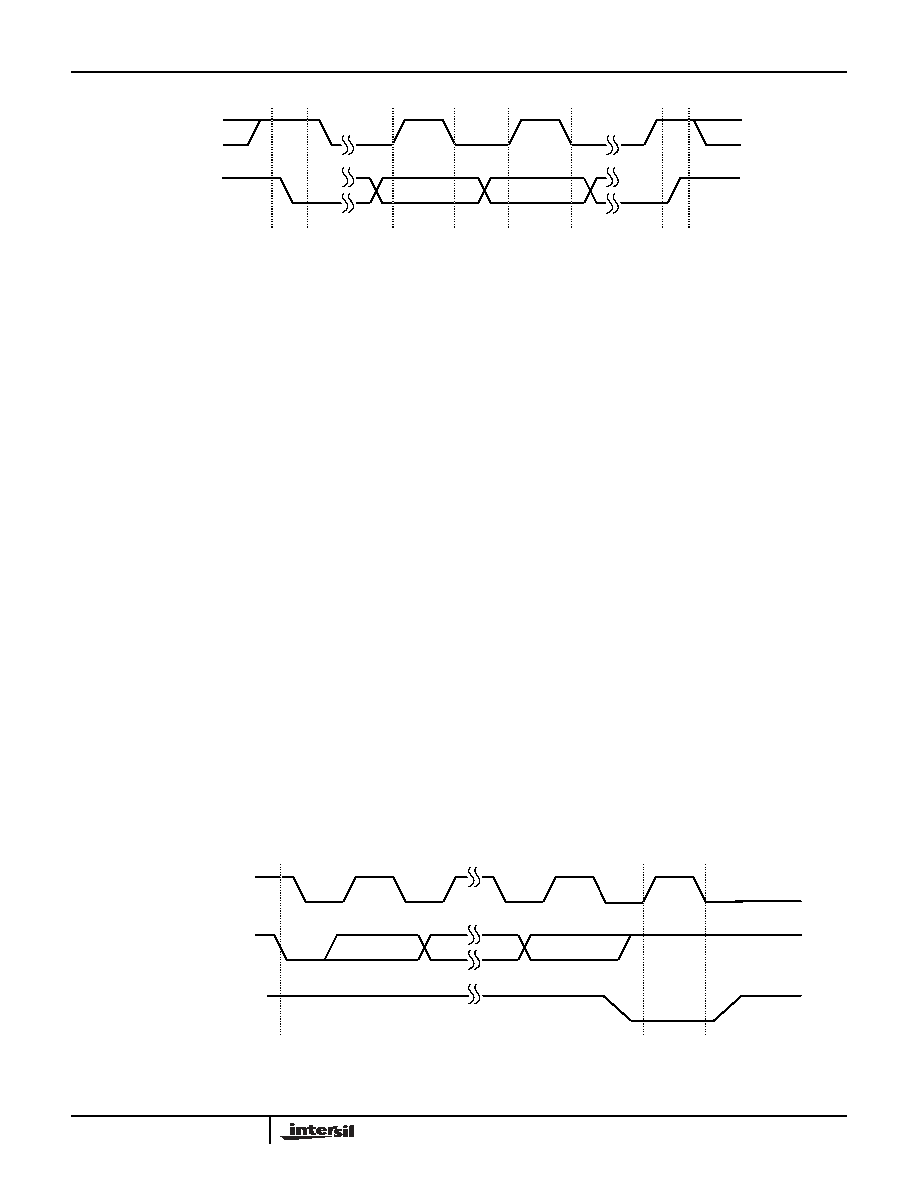
SDA vs. SCL Timing
WP, A0, A1, and A2 Pin Timing
t
SU:WPA
(Note 5)
A0, A1, A2 and WP Setup Time
600
ns
t
HD:WPA
(Note 5)
A0, A1, A2 and WP Hold Time
600
ns
2-Wire Interface Timing (s)
(Continued)
SYMBOL
PARAMETER
MIN
MAX
UNITS
t
SU:STO
t
DH
t
HIGH
t
SU:STA
t
HD:STA
t
HD:DAT
t
SU:DAT
SCL
SDA
(Input Timing)
SDA
(Output Timing)
t
F
t
LOW
t
BUF
t
AA
t
R
t
HD:WP
SCL
SDA IN
WP, A0, A1, or A2
t
SU:WP
Clk 1
START
STOP
Increment/Decrement Timing
SYMBOL
PARAMETER
MIN
TYP
(Note 4)
MAX
UNITS
t
CI
CS to SCL Setup
600
ns
t
ID
(Note 5)
SCL HIGH to U/D, DS0 or DS1 change
600
ns
t
DI
(Note 5)
U/D, DS0 or DS1 to SCL setup
600
ns
t
IL
SCL LOW period
2.5
µs
t
IH
SCL HIGH period
2.5
µs
t
IC
SCL inactive to CS inactive (Nonvolatile Store Setup Time)
1
µs
t
CPHS
CS deselect time (STORE)
10
ms
t
CPHNS
(Note 5)
CS deselect time (NO STORE)
1
µs
t
IW
(Note 5)
SCL to R
W
change
100
500
µs
t
CYC
SCL cycle time
5
µs
t
R
, t
F
(Note 5)
SCL input rise and fall time
500
µs
X9455
6
FN8202.0
November 10, 2004
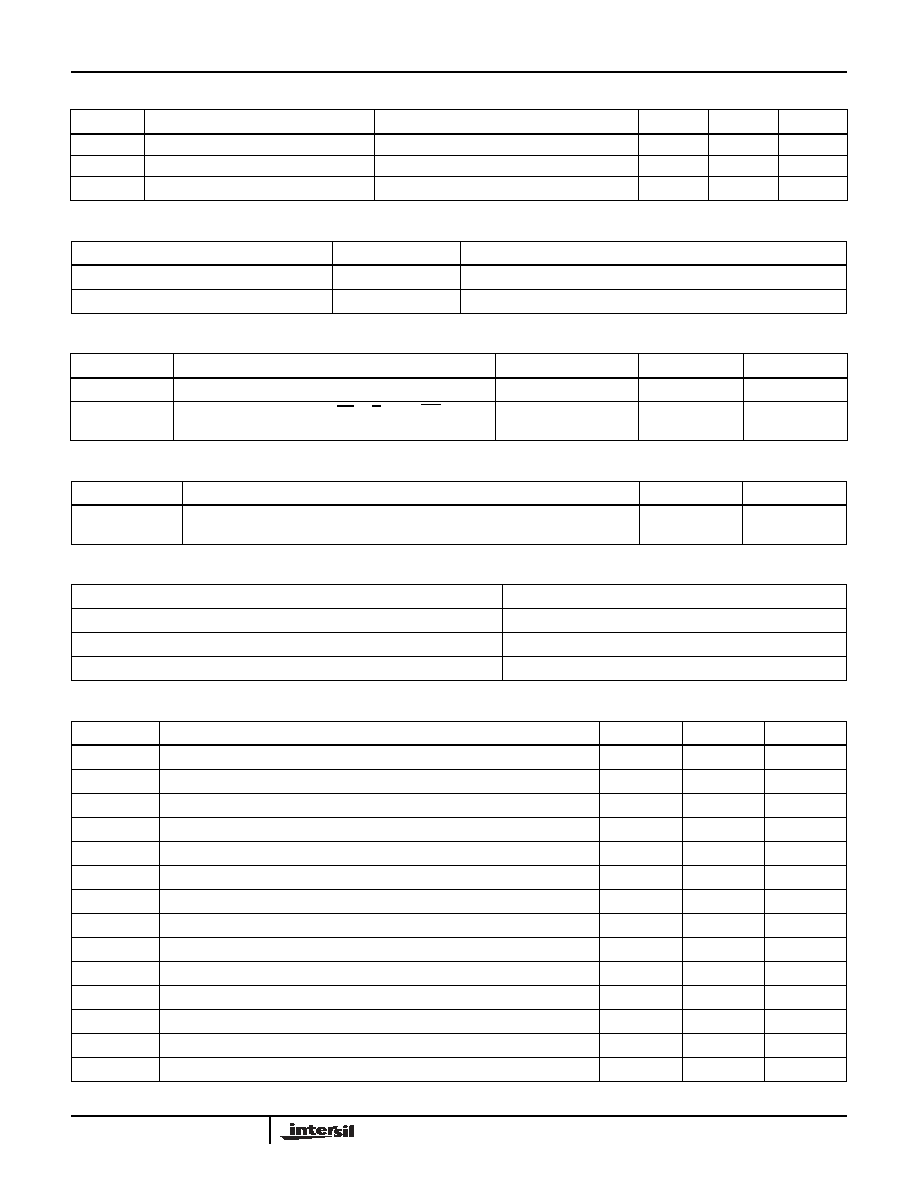
Increment/Decrement Timing
NOTES:
1. Absolute linearity is utilized to determine actual wiper voltage versus expected voltage = [V(R
W(n)(actual)
)-V(R
W(n)(expected)
)]/MI
V(R
W(n)(expected)
) = n(V(R
H
)-V(R
L
))/255 + V(R
L
), with n from 0 to 255.
2. Relative linearity is a measure of the error in step size between taps = [V(R
W(n+1)
)-(V(R
W(n)
) + MI)]/MI, with n from 0 to 254
3. 1 Ml = Minimum Increment = [V(R
H
)-V(R
L
)]/255.
4. Typical values are for T
A
= 25∞C and nominal supply voltage.
5. This parameter is not 100% tested.
6. Ratiometric temperature coefficient = (V(R
W
)
T1(n)
-V(R
W
)
T2(n)
)/[V(R
W
)
T1(n)
(T1-T2)] x 10
6
, with T1 & T2 being 2 temperatures, and n from 0 to
255.
7. Measured with wiper at tap position 255, R
L
grounded, using test circuit.
8. t
WC
is the minimum cycle time to be allowed for any nonvolatile write by the user, unless Acknowledge Polling is used. It is the time from a valid
STOP condition at the end of a write sequence of a 2-wire interface write operation, or from the rising edge of CS of a valid "Store" operation of
the Up/Down interface, to the end of the self-timed internal nonvolatile write cycle.
9. The recommended power up sequence is to apply V
CC
/V
SS
first, then the potentiometer voltages. During power up, the data sheet parameters
for the DCP do not fully apply until t
D
after V
CC
reaches its final value. In order to prevent unwanted tap position changes, or an inadvertant
store, bring the CS pin high before or concurrently with the V
CC
pin on power up.
CS
SCL
U/D
R
W
t
CI
t
IL
t
IH
t
CYC
t
ID
t
DI
t
IW
MI
(3)
t
IC
t
CPHS
t
F
t
R
10%
90%
90%
t
CPHNS
DS0, DS1
High-Voltage Write Cycle Timing
SYMBOL
PARAMETER
TYP
MAX
UNITS
t
WC
(Notes 5, 8)
Non-volatile write cycle time
5
10
ms
XDCP Timing
SYMBOL
PARAMETER
MIN
MAX
UNITS
t
WRL
(Note 5) SCL rising edge to wiper code changed, wiper response time after instruction
issued (all load instructions)
5
20
µs
X9455

7
FN8202.0
November 10, 2004
Test Circuit
Equivalent Circuit
Pin Descriptions
Bus Interface Pins
Serial Data Input/Output (SDA)
The SDA is a bidirectional serial data input/output pin for the
2-wire interface. It receives device address, operation code,
wiper register address and data from a 2-wire external
master device at the rising edge of the serial clock SCL, and
it shifts out data after each falling edge of the serial clock
SCL.
SDA requires an external pull-up resistor, since it's an open
drain output.
Serial Clock (SCL)
This input is the serial clock of the 2-wire and Up/Down
interface.
Device Address (A2-A0)
The Address inputs are used to set the least significant 3 bits
of the 8-bit 2-wire interface slave address. A match in the
slave address serial data stream must be made with the
Address input pins in order to initiate communication with the
X9455. A maximum of 8 devices may occupy the 2-wire
serial bus.
Chip Select (CS)
When the CS pin is low, increment or decrement operations
are possible using the SCL and U/D pins. The 2-wire
interface is disabled at this time. When CS is high, the 2-wire
interface is enabled.
Up or Down Control (U/D)
The U/D input pin is held HIGH during increment operations
and held LOW during decrement operations.
DCP Select (DS1-DS0)
The DS1-DS0 select one of the four DCPs for an Up/Down
interface operation.
Hardware Write Protect Input (WP)
When the WP pin is set low, "write" operations to non volatile
DCP Data Registers are disabled. This includes both 2-wire
interface non-volatile "Write", and Up/Down interface "Store"
operations.
DCP Pins
R
H0
, R
L0
, R
H1
, R
L1
These pins are equivalent to the terminal connections on
mechanical potentiometers. Since there are two DCPs, there
is one set of R
H
and R
L
for each DCP.
R
W0A
, R
W0B
, R
W1A
, and R
W1B
The wiper pins are equivalent to the wiper terminals of
mechanical potentiometers. Since there are two wipers per
DCP, there are four R
W
pins.
Force
Current
Test Point
R
W
C
H
C
L
R
W
R
TOTAL
C
W
R
H
R
L
X9455
8
FN8202.0
November 10, 2004
Principles of Operation
The X9455 is an integrated circuit incorporating two resistor
arrays with dual wipers on each array, their associated
registers and counters, and the serial interface logic
providing direct communication between the host and the
digitally controlled potentiometers. This section provides
detail description of the following:
∑ Resistor Array
∑ Up/Down Interface
∑ 2-wire Interface
Resistor Array Description
The X9455 is comprised of two resistor arrays. Each array
contains 255 discrete resistive segments that are connected
in series. The physical ends of each array are equivalent to
the fixed terminals of a mechanical potentiometer (R
Hi
and
R
Li
inputs). (See Figure 1.)
Each array has two independent wipers. At both ends of
each array and between each resistor segment are two
switches, one connected to each of the wiper pins (R
WiA
and
R
WiB
).
Within each individual array only one switch of each wiper
may be turned on at a time.
These switches are controlled by two Wiper Counter
Register (WCR). The 8-bits of the WCR are decoded to
select and enable one of 256 switches. Note that each wiper
has a dedicated WCR. When all bits of a WCR are zeroes,
the switch closest to the corresponding R
L
pin is selected.
When all bits of a WCR are ones, the switch closest to the
corresponding R
H
pin is selected.
The WCRs are volatile and may be written directly. There
are four non-volatile Data Registers (DR) associated with
each WCR. Each DR can be loaded into WCR. All DRs and
WCRs can be read or written.
Power Up and Down Requirements
During power up CS must be high to avoid inadvertant
"store" operations. At power up, the contents of Data
Registers Level 0 (DR0A0, DR0B0, DR1A0, and DR1B0),
are loaded into the corresponding wiper counter register.
One of
WCRiA[7:0]
R
Hi
R
WiA
R
Li
= FF hex
255
254
255
256
Decoder
Volatile
8-bit
Wiper
Counter
Register
WCRiA
Four
Non-Volatile
Data
Registers
DRiA0, DRiA1,
DRiA2, and
DRiA3
"i" is either 0 or 1
WCRiB[7:0]
= 00 hex
1
0
R
WiB
254
0
1
WCRiB[7:0]
= FF hex
WCRiA[7:0]
= 00 hex
Volatile
8-bit
Wiper
Counter
Register
WCRiB
Four
Non-Volatile
Data
Registers
DRiB0, DRiB1,
DRiB2, and
DRiB3
2-wire and
Up/Down Interfaces
.
.
.
.
.
.
FIGURE 1. DETAILED BLOCK DIAGRAM OF ONE DCP
X9455

9
FN8202.0
November 10, 2004
Up/Down Interface Operation
The SCL, U/D, CS, DS0 and DS1 inputs control the
movement of the wiper along the resistor array. With CS set
LOW the device is selected and enabled to respond to the
U/D and SCL inputs. HIGH to LOW transitions on SCL will
increment or decrement (depending on the state of the U/D
input) a wiper counter register selected by DS0 and DS1.
The output of this counter is decoded to select one of 256
wiper positions along the resistor array.
The value of the counter is stored in nonvolatile data register
Level 0 of the corresponding WCR whenever CS transitions
HIGH while the SCL and WP inputs are HIGH (See Table 1).
During a "Store" operation bits WCRSel1 and WCRSel0 in
the status register must be both "0", which is their power up
default value. Other combinations are reserved and must not
be used.
The system may select the X9455, move a wiper, and
deselect the device without having to store the latest wiper
position in nonvolatile memory. After the wiper movement is
performed as described above and once the new position is
reached, the system must keep SCL LOW while taking CS
HIGH. The new wiper position is maintained until changed
by the system or until a power-down/up cycle recalled the
previously stored data.
This procedure allows the system to always power-up to a
preset value stored in nonvolatile memory; then during
system operation minor adjustments could be made. The
adjustments might be based on user preference, system
parameter changes due to temperature drift, etc.
The state of U/D may be changed while CS remains LOW.
This allows the host system to enable the device and then
move the wiper up and down until the proper trim is attained.
The 2-wire interface is disabled while CS remains LOW.
*While in Standby, the 2-wire interface is enabled
TABLE 1. DCP SELECTION FOR UP/DOWN CONTROL
DS1
DS0
SELECTED WIPER
CONTROL REGISTER
0
0
Wiper A of DCP0
1
1
Wiper B of DCP0
1
0
Wiper A of DCP1
0
1
Wiper B of DCP1
TABLE 2. MODE SELECTION FOR UP/DOWN CONTROL
CS
SCL
U/D
MODE
L
H
Wiper Up
L
L
Wiper Down
H
X
Store Wiper Position to nonvolatile
memory if WP pin is high. No store,
return to standby, if WP pin is low.
H
X
X
Standby*
L
X
No Store, Return to Standby
L
H
Wiper Up (not recommended)
L
L
Wiper Down (not recommended)
X9455
10
FN8202.0
November 10, 2004
2-Wire serial interface
Protocol Overview
The device supports a bidirectional bus oriented protocol.
The protocol defines any device that sends data onto the
bus as a transmitter, and the receiving device as the
receiver. The device controlling the transfer is called the
master and the device being controlled is called the slave.
The master always initiates data transfers, and provides the
clock for both transmit and receive operations. The X9455
operates as a slave in all applications.
All 2-wire interface operations must begin with a START,
followed by a Slave Address byte. The Slave Address
selects the X9455, and specifies if a Read or Write operation
is to be performed.
All Communication over the 2-wire interface is conducted by
sending the MSB of each byte of data first.
Serial Clock and Data
Data states on the SDA line can change only while SCL is
LOW. SDA state changes while SCL is HIGH are reserved
for indicating START and STOP conditions (See Figure 2).
On power up of the X9455, the SDA pin is in the input mode.
Serial Start Condition
All commands are preceded by the START condition, which
is a HIGH to LOW transition of SDA while SCL is HIGH. The
device continuously monitors the SDA and SCL lines for the
START condition and does not respond to any command
until this condition has been met (See Figure 2).
Serial Stop Condition
All communications must be terminated by a STOP
condition, which is a LOW to HIGH transition of SDA while
SCL is HIGH. The STOP condition is also used to place the
device into the Standby power mode after a read sequence.
A STOP condition can only be issued after the transmitting
device has released the bus (See Figure 2).
Serial Acknowledge
An ACK (Acknowledge), is a software convention used to
indicate a successful data transfer. The transmitting device,
either master or slave, releases the bus after transmitting
eight bits. During the ninth clock cycle, the receiver pulls the
SDA line LOW to acknowledge the reception of the eight bits
of data (See Figure 3).
The device responds with an ACK after recognition of a
START condition followed by a valid Slave Address byte. A
valid Slave Address byte must contain the Device Type
Identifier 0101, and the Device Address bits matching the
logic state of pins A2, A1, and A0 (See Figure 4).
If a write operation is selected, the device responds with an
ACK after the receipt of each subsequent eight-bit word.
In the read mode, the device transmits eight bits of data,
releases the SDA line, and then monitors the line for an
ACK. The device continues transmitting data if an ACK is
detected. The device terminates further data transmissions if
an ACK is not detected. The master must then issue a STOP
condition to place the device into a known state.
SDA
SCL
START
DATA
DATA
STOP
STABLE
CHANGE
DATA
STABLE
FIGURE 2. VALID DATA CHANGES, START, AND STOP CONDITIONS
SDA Output from
Transmitter
SDA Output from
Receiver
8
1
9
START
ACK
SCL from Master
FIGURE 3. ACKNOWLEDGE RESPONSE FROM RECEIVER
X9455
11
FN8202.0
November 10, 2004
Slave Address Byte
Following a START condition, the master must output a
Slave Address Byte (Refer to figure 4.). This byte includes
three parts:
∑ The four MSBs (SA7-SA4) are the Device Type Identifier,
which must always be set to 0101 in order to select the
X9455.
∑ The next three bits (SA3-SA1) are the Device Address bits
(AS2-AS0). To access any part of the X9455's memory,
the value of bits AS2, AS1, and AS0 must correspond to
the logic levels at pins A2, A1, and A0 respectively.
∑ The LSB (SA0) is the R/W bit. This bit defines the
operation to be performed on the device being addressed.
When the R/W bit is "1", then a Read operation is
selected. A "0" selects a Write operation
.
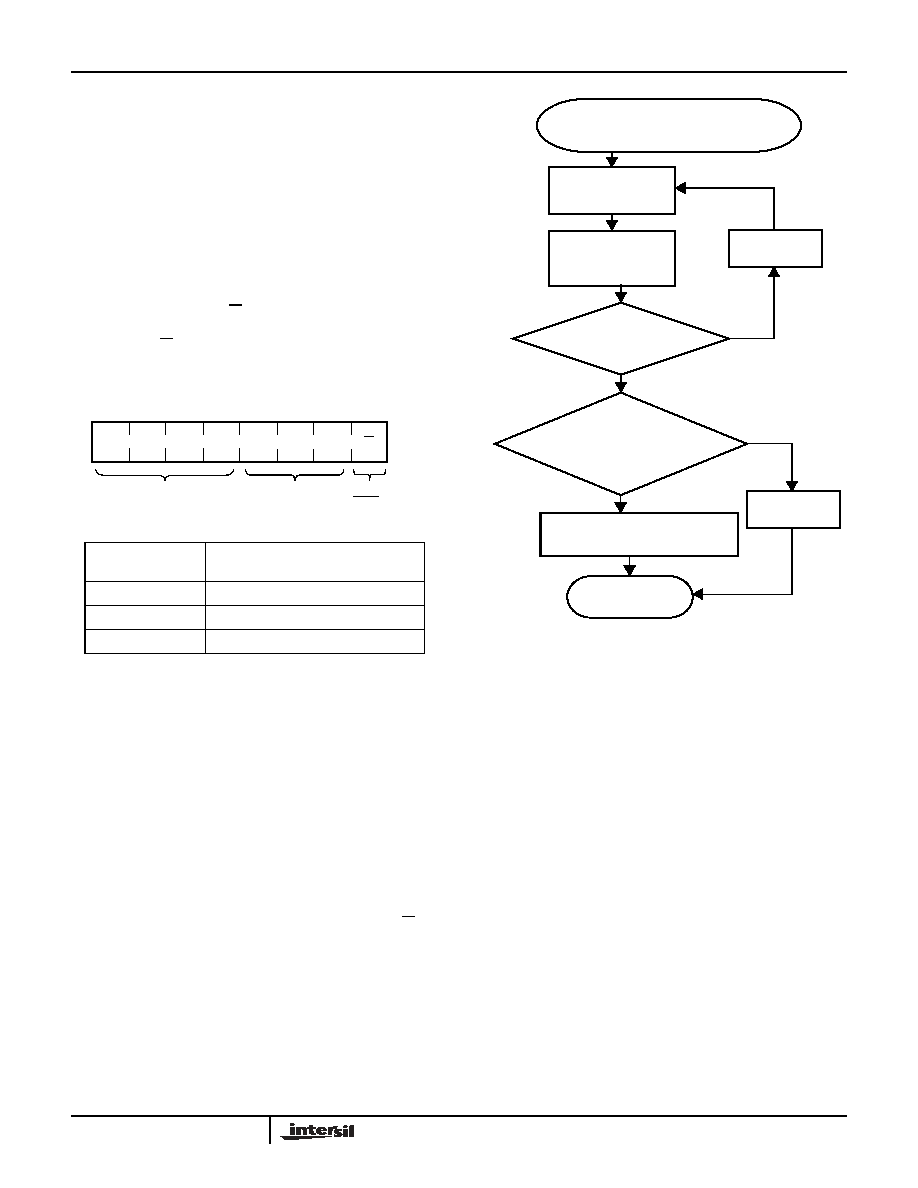
Nonvolatile Write Acknowledge Polling
After a nonvolatile write command sequence is correctly
issued (including the final STOP condition), the X9455
initiates an internal high voltage write cycle. This cycle
typically requires 5 ms. During this time, any Read or Write
command is ignored by the X9455. Write Acknowledge
Polling is used to determine whether a high voltage write
cycle is completed.
During acknowledge polling, the master first issues a START
condition followed by a Slave Address Byte. The Slave
Address Byte contains the X9455's Device Type Identifier
and Device Address. The LSB of the Slave Address (R/W)
can be set to either 1 or 0 in this case. If the device is busy
within the high voltage cycle, then no ACK is returned. If the
high voltage cycle is completed, an ACK is returned and the
master can then proceed with a new Read or Write
operation. (Refer to figure 5.)
2-Wire Serial Interface Operation
X9455 Digital Potentiometer Register Organization
Refer to the Functional Diagram on page 1. There are 2
Digital Potentiometers, referred to as DCP0, and DCP1.
Each potentiometer has two volatile Wiper Control Registers
(WCRs). Each wiper has four non-volatile registers to store
wiper position or general data. See Table 2 for register
numbering.
SA6
SA7
SA5
SA3
SA2
SA1
SA0
Device Type
Identifier
Read or
SA4
SLAVE ADDRESS
BIT(S)
DESCRIPTION
SA7-SA4
Device Type Identifier
SA3-SA1
Device Address
SA0
Read or Write Operation Select
R/W
0
1
0
1
Address
Device
AS0
AS1
AS2
Write
FIGURE 4. SLAVE ADDRESS (SA) FORMAT
ACK returned?
Issue Slave Address
Byte (Read or Write)
Byte load completed by issuing
STOP. Enter ACK Polling
Issue STOP
Issue START
NO
YES
NO
Continue normal Read or Write
command sequence
PROCEED
YES
complete. Continue command
sequence.
High Voltage
Issue STOP
FIGURE 5. ACKNOWLEDGE POLLING SEQUENCE
X9455

12
FN8202.0
November 10, 2004
The registers are organized in pages of four, with one page
consisting of the four volatile WCRs, a second page
consisting of the Level 0 Data Registers, and so forth. These
pages can be written four bytes at time. In this manner all
four potentiometer WCRs can be updated in a single serial
write (see Page Write Operation), as well as all four registers
of a given page in the DR array.
The unique feature of the X9455 device is that writing or
reading to a Data Register of a given wiper automatically
updates the WCR of that wiper with the new value. In this
manner data can be moved from a particular wiper register
to that wiper's WCR just by performing a 2-wire read
operation. Simultaneously, that data byte can be utilized by
the host.
Status Register Organization
The Status Register (SR) is used in read and write
operations to select the appropriate wiper register. Before
any wiper register can be accessed, the SR must be set to
the correct value. It is accessed by setting the Address Byte
to 07h. See Table 3. Do this by writing the slave address
followed by a byte address of 07h. The SR is volatile and
defaults to 00h on power up. It is an 8-bit register containing
three control bits in the 3 LSBs as follows:
Bits WCRSel1 and WCRSel0 determine which Data Register
of a wiper is selected for a given operation. NVEnable is
used to select the volatile WCR if "0", and one of the non
volatile wiper registers if "1". Table 3 shows this register
organization.
Wiper Addressing for 2-wire Interface
Once the Data Register Level has been selected by a 2-wire
instruction, then the wiper is determined by the Address Byte
of the following instruction. Note again that this enables a
complete page write of all four potentiometers at once a
particular Wiper Register has been chosen. The register
addresses accessible in the X9455 include:
TABLE 3. REGISTER NUMBERING
STATUS REG (NOTE 1)
(Addr: 07H)
REGISTERED SELECTED (NOTE 2)
Reserved
bits 7-3
DRSel1
bit 2
DRSel0
bit 1
NVEnable
bit 0
DCP0
DCP2
(Addr: 00h)
(Addr: 11h)
(Addr: 02h)
(Addr: 01h)
Reserved
X
X
0
WCR0A
WCR0B
WCR1A
WCR1B
0
0
1
DR0A0
DR0B0
DR1A0
DR1B0
0
1
1
DR0A1
DR0B1
DR1A1
DR1B1
1
0
1
DR0A2
DR0B2
DR1A2
DR1B2
1
1
1
DR0A3
DR0B3
DR1A3
DR1B3
NOTES:To read or write the contents of a single Data Register or Wiper Register:
1.
Load the status register (using a write command) to select the row. (See Figure 6.)
Writing a 1, 3, 5, or 7 to the Status Register specifies that the subsequent read or write command will access a Data Register. This Status
Register operation also initiates a transfer of the contents of the selected data register to its associated WCR for all DCPs. So, for example,
writing `03h' to the status register causes the value in DR01 to move to WCR0, DR11 to move to WCR1, DR21 to move to WCR2, and DR31 to
move to WCR3.
Writing a 0 to bit `0' of the Status Register specifies that the subsequent read or write command will access a Wiper Counter Register. Each
WCR can be written to individually, without affecting the contents of any other.
2. Access the desired DR or WCR using a new write or read command (see Figure 7 for write and Figure 9 for read.)
Specify the desired column (DCP number) by sending the DCP address as part of this read or write command.
7
6
5
4
3
2
1
0
Reserved
WCRSel1
WCRSel0
NVEnable
X9455

13
FN8202.0
November 10, 2004
All other address bits in the address byte must be set to "0"
during 2-wire write operations and their value should be
ignored when read.
Byte Write Operation
For any Byte Write operation, the X9455 requires the Slave
Address byte, an Address Byte, and a Data Byte (See Figure
7). After each of them, the X9455 responds with an ACK.
The master then terminates the transfer by generating a
STOP condition. At this time, if the write operation is to a
volatile register (WCR, or SR), the X9455 is ready for the
next read or write operation. If the write operation is to a
nonvolatile register (DR), and the WP pin is high, the X9455
begins the internal write cycle to the nonvolatile memory.
During the internal nonvolatile write cycle, the X9455 does
not respond to any requests from the master. The SDA
output is at high impedance.
The SR bits and WP pin determine the register being
accessed through the 2-wire interface. See Table 2 on page
9.
As noted before, any write operation to a Data Register
(DR), also transfers the contents of all the data registers in
that row to their corresponding WCR.
For example, to write 3Ahex to the Level 1 Data Register of
wiper 1A (DR1A1) the following sequence is required:
During the sequence of this example, WP pin must be high,
and A0, A1, and A2 pins must be low. When completed, the
DR1A1 register and the WCR1A of Wiper 1A will be set to
3Ah, and the other data registers in Row 1 will transfer their
contents to the respective WCRs.
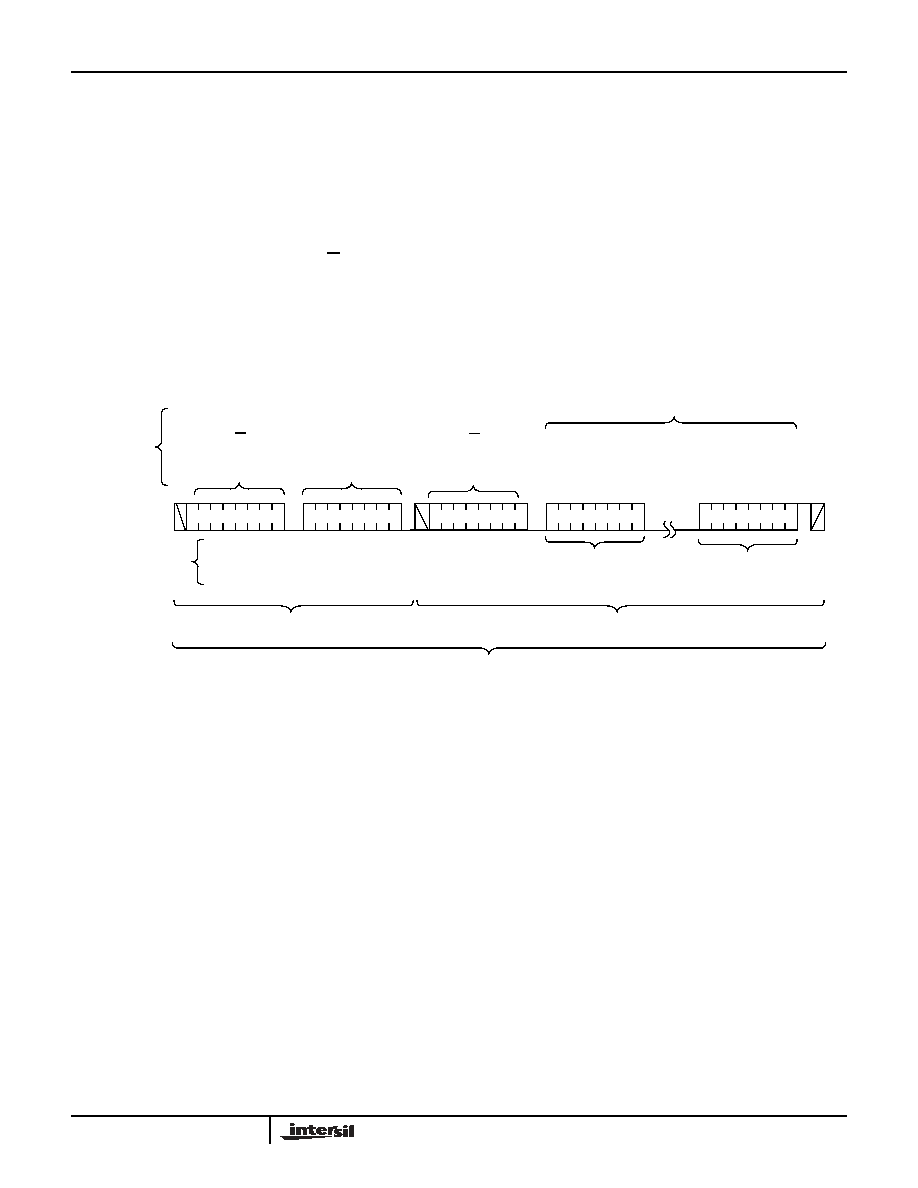
S
t
a
r
t
S
t
o
p
Slave
Address
Status Register
Address
Data
A
C
K
A
C
K
Signal at SDA
Signals from
the Slave
Signals from
the Master
0
A
C
K
If bit 0 of data byte = 1,
DR contents move to WCR
during this ACK period
0 1 0 1
0 0 0 0 0 1 1 1
0 0 0 0 0 x x 1
DR select
FIGURE 6. STATUS REGISTER WRITE (USES STANDARD BYTE WRITE SEQUENCE TO SET UP ACCESS TO A DATA REGISTER)
TABLE 4. ADDRESSING FOR 2-WIRE INTERFACE ADDRESS
BYTE
ADDRESS (HEX)
CONTENTS
0
Wiper 0A
1
Wiper 1B
2
Wiper 1A
3
Wiper 0B
4
Not Used
5
Not Used
6
Not Used
7
Status Register
START
Slave Address
0101 0000
ACK
Address Byte
0000 0111
ACK
Data Byte
0000 0011
ACK
(note: at this ACK, the WCRs are all updated with their
respective DR.)
STOP
START
Slave Address
0101 0000
ACK
Address Byte
0000 0010
ACK
Data Byte
0011 1010
ACK
STOP
(Hardware Address = 000,
and a Write command)
(Indicates Status Register
address)
(Data Register Level 1 and
NVEnable selected)
(Hardware address = 000,
(Access Wiper 1A)
(Write Data Byte 3Ah)
Write command)
X9455
14
FN8202.0
November 10, 2004
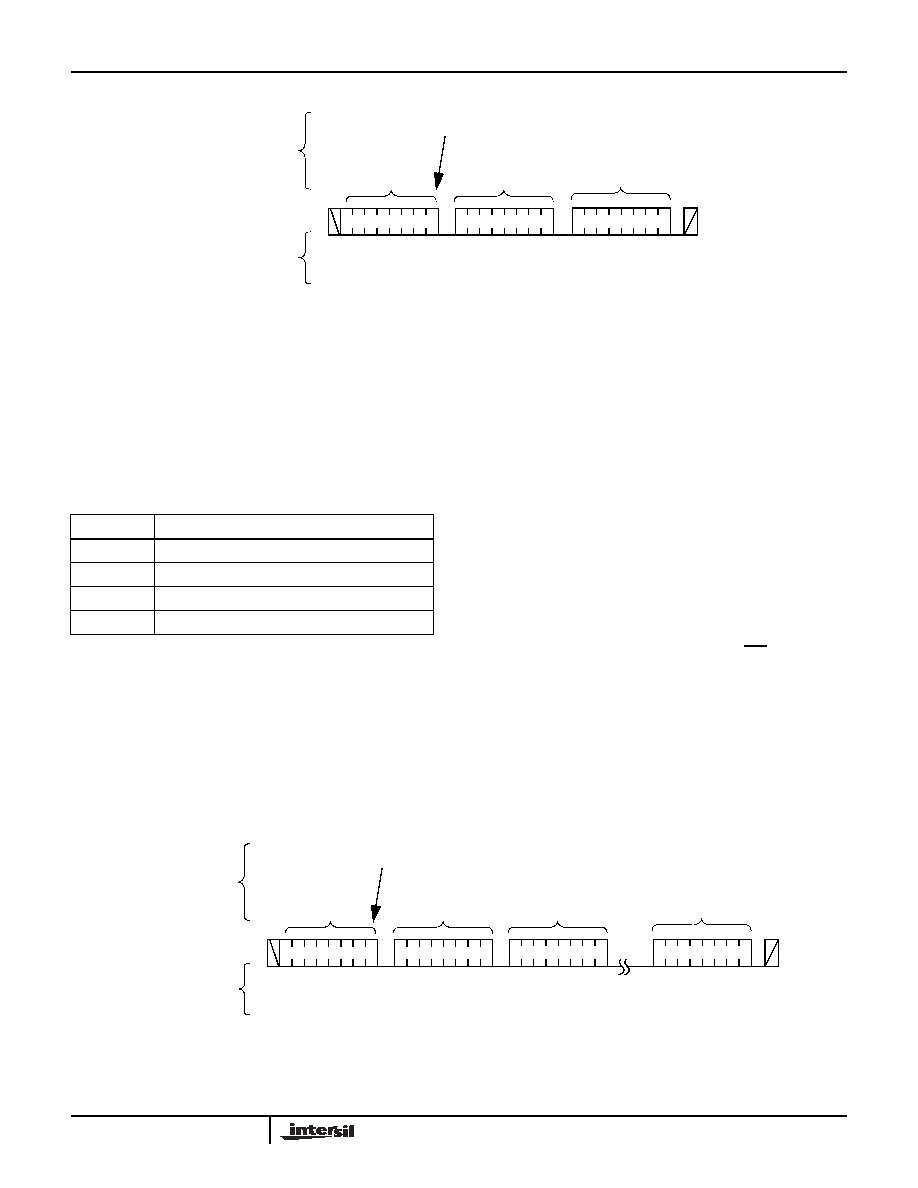
Page Write Operation
As stated previously, the memory is organized as a single
Status Register (SR), and four pages of four registers each.
Each page contains one Data Register for each wiper.
Normally a page write operation will be used to efficiently
update all four Data Registers and WCR in a single Write
command. Note the special sequence for writing to a page:
First wiper 0A, then 1B, then 1A, then 0B as shown in Figure
9.
In order to perform a Page Write operation to the memory
array, the NVEnable bit in the SR must first be set to "1".
A Page Write operation is initiated in the same manner as
the Byte Write operation; but instead of terminating the write
cycle after the first data byte is transferred, the master can
transmit up to 4 bytes (See Figure 9). After the receipt of
each byte, the X9455 responds with an ACK, and the
internal WCR address is incremented by one. The page
address remains constant. When the address reaches the
end of the page, it "rolls over" and goes back to the first byte
of the same page.
For example, if the master writes three bytes to a page
starting at location DR1A2, the first two bytes are written to
locations DR1A2 and DR0B2, while the last byte is written to
location DR0A2. Afterwards, the WCR address would point
to location DR1B2. If the master supplies more than four
bytes of data, then new data overwrites the previous data,
one byte at a time.
The master terminates the loading of Data Bytes by issuing
a STOP condition, which initiates the nonvolatile write cycle.
As with the Byte Write operation, all inputs are disabled until
completion of the internal write cycle. If the WP pin is low,
the nonvolatile write cycle doesn't start and the bytes are
discarded.
Notice that the Data Bytes are also written to the WCR of the
corresponding WCRs, therefore in the above example,
WCR1A, WCR0B, and WCR0A are also written, and
WCR1B is updated with the contents of DR1B2.
S
t
a
r
t
S
t
o
p
Slave
Address
Address
Byte
Data
Byte
A
C
K
Signals from the
Master
Signals from the
Slave
A
C
K
0
0
0
1
1
A
C
K
Write
Signal at SDA
FIGURE 7. BYTE WRITE SEQUENCE
WCR
WCR0A
WCR1B WCR1A WCR0B
DR Level 0
DR0A0
DR1B0 DR1A0 DR0B0
DR Level 1
DR0A1
DR1B1 DR1A1 DR0B1
DR Level 2
DR0A2
DR1B2 DR1A2 DR0B2
DR Level 3
DR0A3
DR1B3 DR1A3 DR0B3
FIGURE 8. PAGE WRITE SEQUENCE*
*Page writes may wrap around to the first address on a page from
the last address.
2 < n < 4
Signals from the
Master
Signals from the
Slave
Signal at SDA
S
t
a
r
t
Slave
Address
Address
Byte
A
C
K
A
C
K
0
0
0
1
1
Data Byte (1)
S
t
o
p
A
C
K
A
C
K
Data Byte (n)
Write
FIGURE 9. PAGE WRITE OPERATION
X9455
15
FN8202.0
November 10, 2004
Move/Read Operation
The Move/Read operation simultaneously reads the
contents of a data register and moves the contents into the
corresponding DCP's WCR and all wipers will have their
WCR's updated with the data register values from the row
that was read. Move/Read operation consists of a one byte,
or three byte instruction followed by one or more Data Bytes
(See Figure 10). To read an arbitrary byte, the master
initiates the operation issuing the following sequence: a
START, the Slave Address byte with the R/W bit set to "0",
an Address Byte, a second START, and a second Slave
Address byte with the R/W bit set to "1". After each of the
three bytes, the X9455 responds with an ACK. Then the
X9455 transmits Data Bytes as long as the master responds
with an ACK during the SCL cycle following the eighth bit of
each byte. The master terminates the Move/Read operation
(issuing a STOP condition) following the last bit of the last
Data Byte.
The first byte being read is determined by the current wiper
address and by the Status Register bits, according to Table 1
on page 11. If more than one byte is read, the WCR address
is incremented by one after each byte, in the same way as
during a Page Write operation. After reaching WCR0B, the
WCR address "rolls over" to WCR0A.
On power up, the Address pointer is set to the Data Register
0 of WCR0A.
Signals
from the
Master
Signals from the
Slave
Signal at SDA
S
t
a
r
t
Slave
Address with
R/W=0
Address
Byte
A
C
K
A
C
K
0
0
0
1
1
S
t
o
p
A
C
K
0
1
0
1
1
Slave
Address with
R/W=1
A
C
K
S
t
a
r
t
Last Read Data
Byte
First Read Data
Byte
A
C
K
One or more Data Bytes
Current Address Read
Setting the Current Address
Random Address Read
FIGURE 10. MOVE/READ SEQUENCE
X9455
16
FN8202.0
November 10, 2004
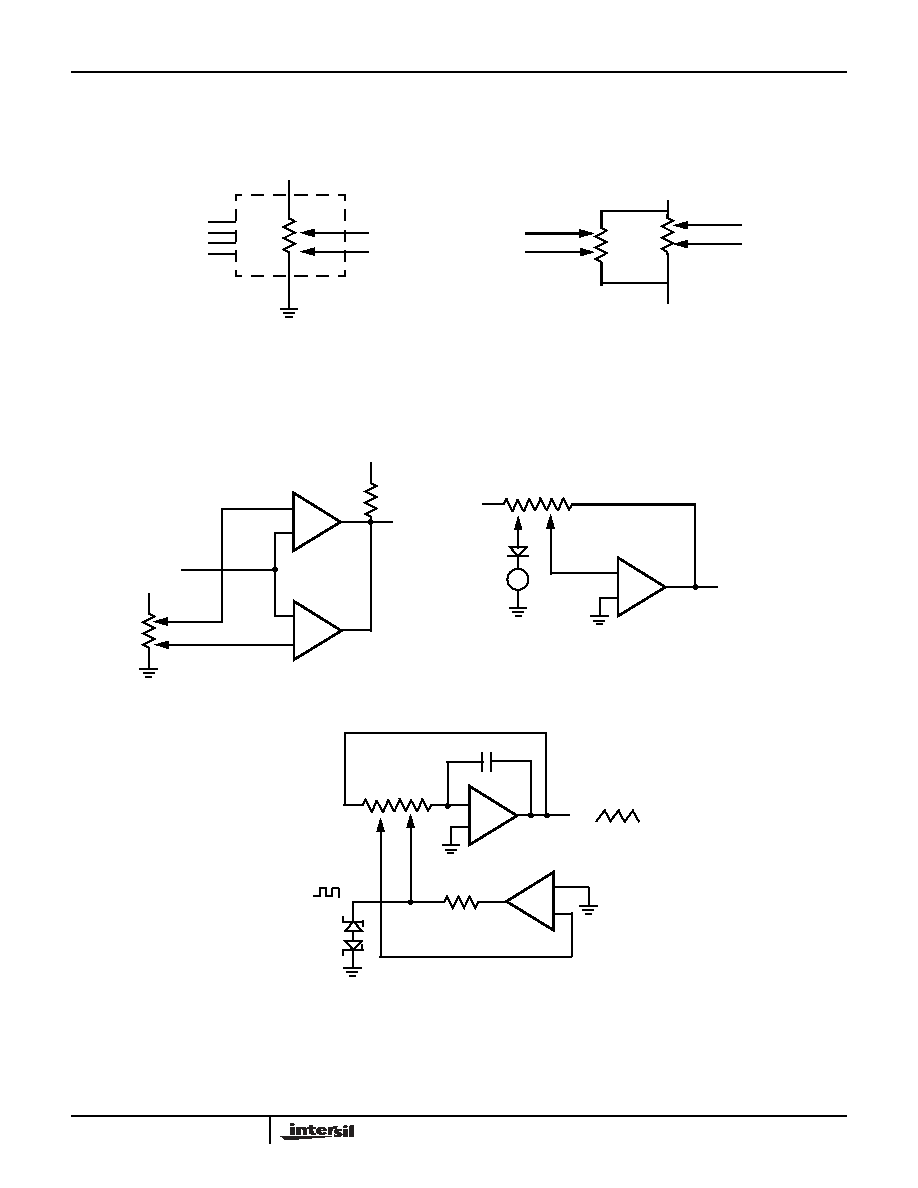
Applications information
Basic Configurations of Electronic Potentiometers
Application Circuits
V
R
RW0
Four terminal
Potentiometer;
Variable voltage divider
Four-Wiper DCP
RW1
RW0A
RW0B
RW1A
RW1B
POT0
POT1
RH
RL
POTi
WINDOW COMPARATOR
SHUNT LIMITER
FUNCTION GENERATOR
+
-
V
S
V
O
V+
+
-
V
UL
V
LL
V+
+
-
V
S
V
O
}
}
V
R
+
}
mR nR
pR
+
-
V
O
}
}
}
mR nR pR
C
+
-
X9455
17
FN8202.0
November 10, 2004
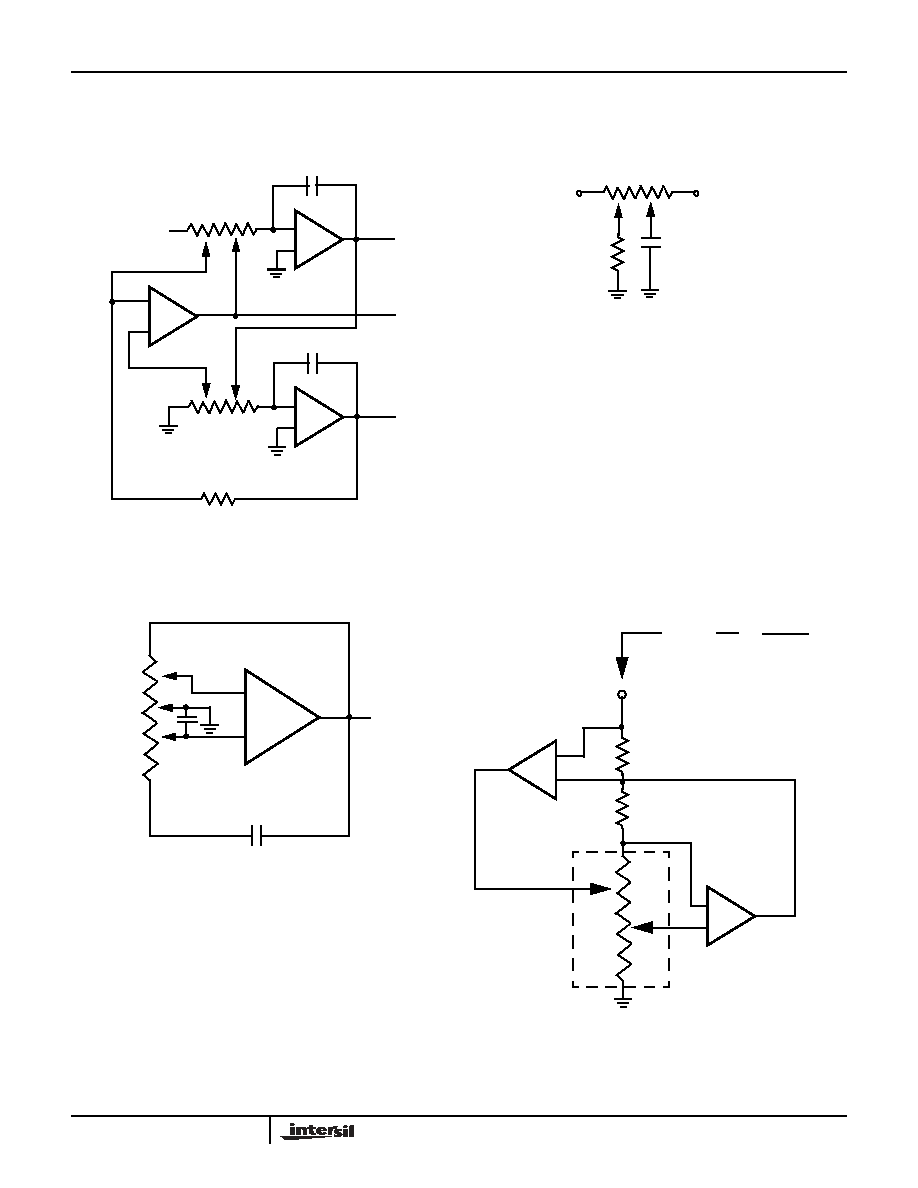
PROGRAMMABLE STATE VARIABLE FILTER
+
-
V
O
(BP)
}
}
}
mR1 nR1 pR1
C
V
S
+
-
V
O
(LP)
}
}
}
mR2 nR2 pR2
C
+
-
R3
V
O
(HP)
PROGRAMMABLE LADDER NETWORKS
}
}
}
mR nR
pR
R1
C1
A2
A1
A3
+
-
V
O
}
C2
R
4
C1
}
R
3
}
R
2
}
R
1
R
W3
R
W2
R
W1
WIEN BRIDGE OSCILLATOR
+
-
+
-
R
3
R
4
R
5
Two Wiper DCP
Z
1
Z
2
Z
IN
=
Z
1
Z
2
R
3 *
R
5
R
4
(
)
*
GENERALIZED IMPEDANCE CONVERTER
X9455

18
All Intersil U.S. products are manufactured, assembled and tested utilizing ISO9000 quality systems.
Intersil Corporation's quality certifications can be viewed at www.intersil.com/design/quality
Intersil products are sold by description only. Intersil Corporation reserves the right to make changes in circuit design, software and/or specifications at any time without
notice. Accordingly, the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be accurate and
reliable. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may result
from its use. No license is granted by implication or otherwise under any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see www.intersil.com
FN8202.0
November 10, 2004
PACKAGING INFORMATION
NOTE: ALL DIMENSIONS IN INCHES (IN PARENTHESES IN MILLIMETERS)
24-Lead Plastic, TSSOP, Package Code V24
.169 (4.3)
.177 (4.5)
.252 (6.4) BSC
.026 (.65) BSC
.303 (7.70)
.311 (7.90)
.002 (.06)
.005 (.15)
.047 (1.20)
.0075 (.19)
.0118 (.30)
See Detail "A"
.031 (.80)
.041 (1.05)
.010 (.25)
.020 (.50)
.030 (.75)
Gage Plane
Seating Plane
Detail A (20X)
(4.16) (7.72)
(1.78)
(0.42)
(0.65)
ALL MEASUREMENTS ARE TYPICAL
0∞-8∞
X9455