 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: HAL810 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

HAL810
Programmable Linear
Hall Effect Sensor
Edition Nov. 22, 2002
6251-536-2DS
DATA SHEET
MICRONAS
MICRONAS

HAL 810
DATA SHEET
2
Nov. 22, 2002; 6251-536-2DS
Micronas
Contents
Page
Section
Title
3
1.
Introduction
3
1.1.
Major Applications
3
1.2.
Features
4
1.3.
Marking Code
4
1.3.1.
Special Marking of Prototype Parts
4
1.4.
Operating Junction Temperature Range (T
J
)
4
1.5.
Hall Sensor Package Codes
4
1.6.
Solderability
4
1.7.
Pin Connections and Short Descriptions
5
2.
Functional Description
5
2.1.
General Function
7
2.2.
Digital Signal Processing and EEPROM
9
2.3.
Calibration Procedure
9
2.3.1.
General Procedure
10
2.3.2.
Calibration of the Angle Sensor
12
3.
Specifications
12
3.1.
Outline Dimensions
12
3.2.
Dimensions of Sensitive Area
12
3.3.
Position of Sensitive Area
13
3.4.
Absolute Maximum Ratings
13
3.4.1.
Storage and Shelf Life
13
3.5.
Recommended Operating Conditions
14
3.6.
Electrical Characteristics
15
3.7.
Magnetic Characteristics
15
3.8.
Open-Circuit Detection
15
3.9.
Typical Characteristics
17
4.
Application Notes
17
4.1.
Application Circuit
17
4.2.
Temperature Compensation
18
4.3.
Undervoltage Behavior
18
4.4.
Ambient Temperature
18
4.5.
EMC and ESD
19
5.
Programming of the Sensor
19
5.1.
Definition of Programming Pulses
19
5.2.
Definition of the Telegram
21
5.3.
Telegram Codes
22
5.4.
Number Formats
23
5.5.
Register Information
23
5.6.
Programming Information
24
6.
Data Sheet History

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
3
Programmable Linear Hall Effect Sensor
Release Note: Revision bars indicate significant
changes to the previous edition.
1. Introduction
The HAL 810 is a new member of the Micronas family
of programmable linear Hall sensors. The linear output
is provided as the duty cycle of a pulse-width modu-
lated output signal (PWM signal). As an extension to
the HAL 800, it offers open-circuit detection.
The HAL 810 is a universal magnetic field sensor with
a linear output based on the Hall effect. The IC is
designed and produced in sub-micron CMOS technol-
ogy and can be used for angle or distance measure-
ments if combined with a rotating or moving magnet.
The major characteristics, such as magnetic field
range, sensitivity, output quiescent signal (output duty
cycle at B = 0 mT), and output duty cycle range are
programmable in a non-volatile memory.
The HAL 810 features a temperature-compensated
Hall plate with chopped offset compensation, an A/D
converter, digital signal processing, an EEPROM
memory with redundancy and lock function for the cali-
bration data, a serial interface for programming the
EEPROM, and protection devices at all pins. The inter-
nal digital signal processing is of great benefit as ana-
log offsets, temperature shifts, and mechanical stress
do not lower the sensor accuracy.
The HAL 810 is programmable by modulating the sup-
ply voltage. No additional programming pin is needed.
The easy programmability allows a 2-point calibration
by adjusting the output signal directly to the input sig-
nal (like mechanical angle, distance, or current). Indi-
vidual adjustment of each sensor during the cus-
tomer's manufacturing process is possible. With this
calibration procedure, the tolerances of the sensor, the
magnet, and the mechanical positioning can be com-
pensated in the final assembly. This offers a low-cost
alternative for all applications that presently need
mechanical adjustment or laser trimming for calibrating
the system.
In addition, the temperature compensation of the Hall
IC can be suited to all common magnetic materials by
programming first and second order temperature coef-
ficients of the Hall sensor sensitivity. This enables
operation over the full temperature range with high
accuracy.
The calculation of the individual sensor characteristics
and the programming of the EEPROM memory can
easily be done with a PC and the application kit from
Micronas.
The sensor is designed for hostile industrial and auto-
motive applications and operates with a supply voltage
of typically 5 V in the ambient temperature range from
-
40 ∞C up to 150 ∞C. The HAL 810 is available in the
very small leaded package TO-92UT.
1.1. Major Applications
Due to the sensor's versatile programming character-
istics, the HAL 810 is the optimal system solution for
applications such as:
≠ contactless potentiometers,
≠ rotary sensors,
≠ distance measurements,
≠ magnetic field and current measurement.
WARNING:
DO NOT USE THESE SENSORS IN LIFE-
SUPPORTING SYSTEMS, AVIATION, AND
AEROSPACE APPLICATIONS.
1.2. Features
≠ high-precision linear Hall effect sensor with digital
signal processing
≠ PWM output signal with a refresh rate of typically
125 Hz and up to 11 Bit resolution
≠ multiple programmable magnetic characteristics in a
non-volatile memory (EEPROM) with redundancy
and lock function
≠ open-circuit feature (ground and supply line break
detection)
≠ temperature characteristics programmable for
matching all common magnetic materials
≠ programmable clamping function
≠ programming via modulation of the supply voltage
≠ operation from
-
40 ∞C up to 150 ∞C
ambient temperature
≠ operation with 4.5 V to 5.5 V supply voltage in spec-
ification and functions with up to 8.5 V
≠ total error < 2.0% over operating voltage range and
temperature range
≠ operation with static magnetic fields and dynamic
magnetic fields
≠ overvoltage and reverse-voltage protection at all pins
≠ magnetic characteristics extremely robust against
mechanical stress
≠ short-circuit protected push-pull output
≠ EMC and ESD optimized design

HAL 810
DATA SHEET
4
Nov. 22, 2002; 6251-536-2DS
Micronas
1.3. Marking Code
The HAL 810 has a marking on the package surface
(branded side). This marking includes the name of the
sensor and the temperature range.
1.3.1. Special Marking of Prototype Parts
Prototype parts are coded with an underscore beneath
the temperature range letter on each IC. They may be
used for lab experiments and design-ins but are not
intended for the use in qualification tests or as produc-
tion parts.
1.4. Operating Junction Temperature Range (T
J
)
The Hall sensors from Micronas are specified to the
chip temperature (junction temperature T
J
).
A: TJ =
-
40 ∞C to +170 ∞C
K: TJ =
-
40 ∞C to +140 ∞C
The relationship between ambient temperature (T
A
)
and junction temperature is explained in Section 4.4.
on page 18.
1.5. Hall Sensor Package Codes
Example: HAL810UT-K
Type:
810
Package:
TO-92UT
Temperature Range:
T
J
=
-
40 ∞C to +140 ∞C
Hall sensors are available in a wide variety of packag-
ing versions and quantities. For more detailed informa-
tion, please refer to the brochure: "Ordering Codes for
Hall Sensors".
1.6. Solderability
Package TO-92UT: according to IEC68-2-58
During soldering reflow processing and manual
reworking, a component body temperature of 260 ∞C
should not be exceeded.
Components stored in the original package should pro-
vide a shelf life of at least 12 months, starting from the
date code printed on the package labels, even in envi-
ronments as extreme as 40 ∞C and 90% relative
humidity.
1.7. Pin Connections and Short Descriptions
Fig. 1≠1: Pin configuration
Type
Temperature Range
A
K
HAL 810
810A
810K
HALXXXPA-T
Temperature Range: A or K
Package: UT for TO-92UT
Type: 810
Pin
No.
Pin Name
Type
Short Description
1
VDD
IN
Supply Voltage and
Programming Pin
2
GND
Ground
3
OUT
OUT
Push-Pull Output
1
2
3
V
DD
OUT
GND

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
5
2. Functional Description
2.1. General Function
The HAL 810 is a monolithic integrated circuit which
provides a pulse-width modulated output signal
(PWM). The duty cycle of the PWM signal is propor-
tional to the magnetic flux through the Hall plate.
The external magnetic field component perpendicular
to the branded side of the package generates a Hall
voltage. The Hall IC is sensitive to magnetic north and
south polarity. This voltage is converted to a digital
value, processed in the Digital Signal Processing Unit
(DSP) according to the settings of the EEPROM regis-
ters, converted to a pulse-width modulated output sig-
nal, and stabilized by a push-pull output transistor
stage. The function and the parameters for the DSP
are explained in Section 2.2. on page 7.
The setting of the LOCK register disables the program-
ming of the EEPROM memory for all time. This regis-
ter cannot be reset.
As long as the LOCK register is not set, the output
characteristics can be adjusted by programming the
EEPROM registers. The IC is addressed by modulat-
ing the supply voltage (see Fig. 2≠1). In the supply
voltage range from 4.5 V to 5.5 V, the sensor gener-
ates a PWM output signal. After detecting a command,
the sensor reads or writes the memory and answers
with a digital signal on the output pin. The PWM output
is switched off during the communication.
The open-circuit detection provides a defined output
voltage if the V
DD
or GND line is broken. Internal tem-
perature compensation circuitry and the chopped off-
set compensation enables operation over the full tem-
perature range with minimal changes in accuracy and
high offset stability. The circuitry also rejects offset
shifts due to mechanical stress from the package. The
non-volatile memory consists of redundant EEPROM
cells. In addition, the sensor IC is equipped with
devices for overvoltage and reverse-voltage protection
at all pins.
Fig. 2≠1: Programming with V
DD
modulation
Fig. 2≠2: HAL 810 block diagram
V
OU
T
(V
)
5
6
7
8
V
DD
(V
)
HAL
810
V
DD
GND
OUT
PWM
V
DD
digital protocol
Internally
Temperature
Oscillator
Switched
100
Digital
Output
OPA
OUT
V
DD
GND
Supply
EEPROM Memory
Lock Control
Digital
stabilized
Supply and
Protection
Devices
Dependent
Bias
Protection
Devices
Hall Plate
Signal
Processing
Conditioning
Level
Detection
Output
A/D
Converter
10 k
Open-circuit
detection

HAL 810
DATA SHEET
6
Nov. 22, 2002; 6251-536-2DS
Micronas
Fig. 2≠3: Details of EEPROM and Digital Signal Processing
MODE Register
FILTER
TC
6 bit
TCSQ
5 bit
DCOQ
11 bit
MIN-
10 bit
11 bit
LOCK
1 bit
3 bit
RANGE
3 bit
EEPROM Memory
A/D
Converter
Digital
Filter
Multiplier
Adder
Limiter
Output
Conditioning
Digital Signal Processing
ADC-READOUT Register
14 bit
Digital
Lock
Control
DUTY
MAX-
DUTY
Output
Micronas
Registers
DCSENSITIVITY
14 bit
0
20
40
60
80
100
≠40 ≠30 ≠20 ≠10
0
10
20
30
40 mT
%
B
Output
Duty
Cycle
DC
OQ
= 50%
Max-Duty = 97%
DCSensitivity = 0.3
Min-Duty = 3%
Range = 30 mT
Filter = 500 Hz
Fig. 2≠4: Example for output characteristics
0
20
40
60
80
100
≠150 ≠100
≠50
0
50
100
150 mT
%
B
Max-Out = 90%
DCSensitivity = -1.36
DC
= -10%
Min-Out = 10%
Range = 100 mT
Filter = 2 kHz
OQ
Output
Duty
Cycle
Fig. 2≠5: Example for output characteristics

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
7
2.2. Digital Signal Processing and EEPROM
The DSP is the main part of this sensor and performs
the signal conditioning. The parameters for the DSP
are stored in the EEPROM registers. The details are
shown in Fig. 2≠3.
Terminology:
MIN-DUTY: name of the register or register value
Min-Duty:
name of the parameter
The EEPROM registers consist of three groups:
Group 1 contains the registers for the adaptation of the
sensor to the magnetic circuit: Mode for selecting the
magnetic field range and filter frequency, TC and
TCSQ for the temperature characteristics of the mag-
netic sensitivity.
Group 2 contains the registers for defining the output
characteristics: DCSENSITIVITY, DCOQ, MIN-DUTY,
and MAX-DUTY. The output characteristic of the sen-
sor is defined by these 4 parameters (see Fig. 2≠5 and
Fig. 2≠6 for examples).
≠ The parameter DC
OQ
(Output Quiescent Duty
Cycle) corresponds to the duty cycle at B = 0 mT.
≠ The parameter DCSensitivity defines the magnetic
sensitivity:
≠ The output duty cycle can be calculated as:
The output duty cycle range can be clamped by setting
the registers MIN-DUTY and MAX-DUTY in order to
enable failure detection (such as short-circuits to V
DD
or GND and open connections).
Group 3 contains the Micronas registers and LOCK for
the locking of all registers. The Micronas registers are
programmed and locked during production and are
read-only for the customer. These registers are used
for oscillator frequency trimming, A/D converter offset
compensation, and several other special settings.
An external magnetic field generates a Hall voltage on
the Hall plate. The ADC converts the amplified positive
or negative Hall voltage (operates with magnetic north
and south poles at the branded side of the package) to
a digital value. Positive values correspond to a mag-
netic north pole on the branded side of the package.
The digital signal is filtered in the internal low-pass fil-
ter and is readable in the ADC-READOUT register.
Depending on the programmable magnetic range of
the Hall IC, the operating range of the A/D converter is
from
-
30 mT...+30 mT up to
-
150 mT...+150 mT.
During further processing, the digital signal is multi-
plied with the sensitivity factor, added to the quiescent
output duty cycle and limited according to Min-Duty
and Max-Duty. The result is converted to the duty
cycle of a pulse width modulated signal and stabilized
by a push-pull output transistor stage.
The ADC-Readout at any given magnetic field
depends on the programmed magnetic field range but
also on the filter frequency. Fig. 2≠6 shows the typical
ADC-Readout values for the different magnetic field
ranges with the filter frequency set to 2 kHz. The rela-
tionship between the minimum and maximum ADC-
Readout values and the filter frequency setting is listed
in the following table.
DC
OUT
* 2048
ADC-Readout * 100%
DCSensitivity =
DC
OUT
=
DCSensitivity *
ADC-Readout / 2048 * 100% + DC
OQ
Filter Frequency
ADC-Readout range
80 Hz
-
3968...3967
160 Hz
-
1985...1985
500 Hz
-
5292...5290
1 kHz
-
2646...2645
2 kHz
-
1512...1511
≠2000
≠1500
≠1000
≠500
0
500
1000
1500
2000
≠200≠150≠100 ≠50
0
50 100 150 200 mT
B
ADC-
READOUT
Range 150 mT
Filter = 2 kHz
Range 90 mT
Range 60 mT
Range 30 mT
Fig. 2≠6: Example for output characteristics

HAL 810
DATA SHEET
8
Nov. 22, 2002; 6251-536-2DS
Micronas
Note: During application design, it should be taken
into consideration that the maximum and mini-
mum ADC-READOUT is not exceeded during
calibration and operation of the Hall IC. Conse-
quently, the maximum and minimum magnetic
fields that may occur in the operational range of
a specific application should not saturate the A/
D converter. Please note that the A/D converter
saturates at magnetic fields well above, respec-
tively below, the magnetic range limits. This
large safety band between specified magnetic
range and true operational range helps to avoid
saturation.
Range
The RANGE bits are the three lowest bits of the MODE
register; they define the magnetic field range of the
A/D converter.
Filter
The FILTER bits are the three highest bits of the
MODE register; they define the
-
3 dB frequency of the
digital low pass filter.
TC and TCSQ
The temperature dependence of the magnetic sensitiv-
ity can be adapted to different magnetic materials in
order to compensate for the change of the magnetic
strength with temperature. The adaptation is done by
programming the TC (Temperature Coefficient) and
the TCSQ registers (Quadratic Temperature Coeffi-
cient). Thereby, the slope and the curvature of the
temperature dependence of the magnetic sensitivity
can be matched to the magnet and the sensor assem-
bly. As a result, the output characteristic can be fixed
over the full temperature range. The sensor can com-
pensate for linear temperature coefficients ranging
from about
-
3100 ppm/K up to 400 ppm/K and qua-
dratic coefficients from about
-
5 ppm/K≤ to 5 ppm/K≤.
Please refer to Section 4.2. on page 17 for the recom-
mended settings for different linear temperature coeffi-
cients.
DCSensitivity
The DCSENSITIVITY register contains the parameter
for the multiplier in the DSP. The DCSensitivity is pro-
grammable between
-
4 and 4. The register can be
changed in steps of 0.00049. DCSensitivity = 1 corre-
sponds to an increase of the output duty cycle by
100% if ADC-Readout increases by 2048.
For all calculations, the digital value of the A/D con-
verter is used. This digital information is derived from
the magnetic signal and is readable from the ADC-
READOUT register.
DC
OQ
The DCOQ register contains the parameter for the
adder in the DSP. DC
OQ
is the output duty cycle with-
out external magnetic field (B = 0 mT, respectively
ADC-Readout = 0) and programmable from -100% to
100%. The register can be changed in steps of
0.0976%.
Note: If DC
OQ
is programmed as negative values, the
maximum output duty cycle is limited to:
For calibration in the system environment, a 2-point
adjustment procedure (see Section 2.3.) is recom-
mended. The suitable DCSensitivity and DC
OQ
values
Magnetic Field Range
Range
-
30 mT...30 mT
0
-
40 mT...40 mT
4
-
60 mT...60 mT
5
-
75 mT...75 mT
1
-
80 mT...80 mT
6
-
90 mT...90 mT
2
-
100 mT...100 mT
7
-
150 mT...150 mT
3
-
3 dB Frequency
Filter
80 Hz
0
160 Hz
1
500 Hz
2
1 kHz
3
2 kHz
4
DC
OUT
* 2048
ADC-Readout * 100%
DCSensitivity =
DC
OUTmax
= DC
OQ
+100%

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
9
for each sensor can be calculated individually by this
procedure.
Clamping Function
The output duty cycle range can be clamped in order
to detect failures like shorts of the output signal to V
DD
or GND or an open circuit.
The MIN-DUTY register contains the parameter for the
lower limit. The minimum duty cycle is programmable
between 0% and 50% in steps of 0.0488%.
The MAX-DUTY register contains the parameter for
the upper limit. The maximum duty cycle is program-
mable between 0% and 100% in steps of 0.0488%.
LOCKR
By setting this 1-bit register, all registers will be locked,
and the sensor will no longer respond to any supply
voltage modulation.
Warning: This register cannot be reset!
ADC-READOUT
This 14-bit register delivers the actual digital value of
the applied magnetic field before the signal process-
ing. This register can be read out and is the basis for
the calibration procedure of the sensor in the system
environment.
2.3. Calibration Procedure
2.3.1. General Procedure
For calibration in the system environment, the applica-
tion kit from Micronas is recommended. It contains the
hardware for the generation of the serial telegram for
programming and the corresponding software for the
input of the register values.
In this section, programming of the sensor using this
programming tool is explained. Please refer to
Section 5. on page 19 for information about program-
ming without this tool.
For the individual calibration of each sensor in the cus-
tomer application, a two point adjustment is recom-
mended (see Fig. 2≠7 for an example). When using
the application kit, the calibration can be done in three
steps:
Step 1: Input of the registers which need not be
adjusted individually
The magnetic circuit, the magnetic material with its
temperature characteristics, the filter frequency, and
low and high clamping duty cycles are given for this
application.
Therefore, the values of the following registers should
be identical for all sensors of the customer application.
≠ Filter
(according to the maximum signal frequency)
≠ Range
(according to the maximum magnetic field at the
sensor position)
≠ TC and TCSQ
(depends on the material of the magnet and the
other temperature dependencies of the application)
≠ Min-Duty and Max-Duty
(according to the application requirements)
Write and store the appropriate settings into the
HAL 810 registers.

HAL 810
DATA SHEET
10
Nov. 22, 2002; 6251-536-2DS
Micronas
Step 2: Calculation of DC
OQ
and DCSensitivity
The calibration points 1 and 2 can be set inside the
specified range. The corresponding values for DC
1
and DC
2
result from the application requirements.
For highest accuracy of the sensor, calibration points
near the minimum and maximum input signal are rec-
ommended. The difference of the duty cycle between
calibration point 1 and calibration point 2 should be
more than 70%.
Set the system to calibration point 1 and read the reg-
ister ADC-READOUT. The result is ADC-Readout1.
Now, set the system to calibration point 2, read the
register ADC-READOUT, and get ADC-Readout2.
With these readouts and the nominal duty cycles DC
1
and DC
2
, for the calibration points 1 and 2, respec-
tively, the values for DCSensitivity and DC
OQ
are cal-
culated as:
This calculation has to be done individually for each
sensor.
Next, write and store the calculated values for DCSen-
sitivity and DC
OQ
into the IC for adjusting the sensor.
The sensor is now calibrated for the customer applica-
tion. However, the programming can be changed
again and again if necessary.
Step 3: Locking the Sensor
The last step is activating the lock function with the
"LOCK" command. Please note that the LOCK function
becomes effective after power-down and power-up of
the Hall IC. The sensor is now locked and does not
respond to any programming or reading commands.
Warning: This register cannot be reset!
2.3.2. Calibration of the Angle Sensor
The following description explains the calibration pro-
cedure using an angle sensor as an example. The
required output characteristic is shown in Fig. 2≠7.
≠ the angle range is from
-
25∞ to 25∞
≠ temperature coefficient of the magnet:
-
500 ppm/K
Min-Duty
DC
1,2
Max-Duty
DC2
-
DC1
ADC-Readout2
-
ADC-Readout1
DCSensitivity =
100%
2048
*
ADC-Readout1 * DCSensitivity * 100%
2048
DC
OQ
= DC
1
-
0
20
40
60
80
100
≠30
≠20
≠10
0
10
20
30
∞
Angle
%
Output
Duty
Cycle
Max-Duty = 95%
Calibration Point 1
Min-Duty = 5%
Calibration Point 2
Fig. 2≠7: Example for output characteristics
DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
11
Step 1: Input of the registers which need not be
adjusted individually
The register values for the following registers are given
for all applications:
≠ Filter
Select the filter frequency: 500 Hz
≠ Range
Select the magnetic field range: 30 mT
≠ TC
For this magnetic material: 6
≠ TCSQ
For this magnetic material: 14
≠ Min-Duty
For our example: 5%
≠ Max-Duty
For our example: 95%
Enter these values in the software, and use the "write
and store" command for permanently writing the val-
ues in the registers.
Step 2: Calculation of DC
OQ
and DCSensitivity
There are two ways to calculate the values for DC
OQ
and DCSensitivity.
Manual Calculation:
Set the system to calibration point 1 (angle 1 =
-
25∞)
and read the register ADC-Readout. For our example,
the result is ADC-Readout1 =
-
2500.
Next, set the system to calibration point 2
(angle 2 = 25∞), and read the register ADC-Readout
again. For our example, the result is ADC-
Readout2 =
+
2350.
With these measurements and the targets DC
1
= 95%
and DC
2
= 5%, the values for DCSensitivity and DC
OQ
are calculated as
Software Calibration:
Use the menu CALIBRATE from the PC software and
enter the values 95% for DC
1
and 5% for DC
2
. Set the
system to calibration point 1 (angle 1 =
-
25∞), press
the key "Read ADC-Readout1", set the system to cali-
bration point 2 (angle 2 = 25∞), press the key "Read
ADC-Readout2", and hit the button "Calculate". The
software will then calculate the appropriate DC
OQ
and
DCSensitivity.
This calculation has to be done individually for each
sensor. Now, write the calculated values with the "write
and store" command into the HAL 810 for program-
ming the sensor.
Step 3: Locking the Sensor
The last step is to activate the lock function with the
"lock" command. Please note that the LOCK function
becomes effective after power-down and power-up of
the Hall IC. The sensor is now locked and does not
respond to any programming or reading commands.
Warning: This register cannot be reset!
5%
-
95%
2350 + 2500
DCSensitivity =
100%
2048
*
=
-
0.3800
DC
OQ
= 95%
-
2048
-
2500*
(-
0.3800)*100%
= 48.61%

HAL 810
DATA SHEET
12
Nov. 22, 2002; 6251-536-2DS
Micronas
3. Specifications
3.1. Outline Dimensions
Fig. 3≠1:
Plastic Transistor Single Outline Package
(TO-92UT)
Weight approximately 0.14 g
Dimensions in mm
Note: For all package diagrams, a mechanical toler-
ance of
±
0.05 mm applies to all dimensions
where no tolerance is explicitly given. All pack-
age dimensions exclude molding flash.
3.2. Dimensions of Sensitive Area
0.25 mm x 0.25 mm
3.3. Position of Sensitive Area
SPGS000014-4-A/4E
branded side
TO-92UT
x
center of the package
y
1.5 mm nominal

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
13
3.4. Absolute Maximum Ratings
Stresses beyond those listed in the "Absolute Maximum Ratings" may cause permanent damage to the device. This
is a stress rating only. Functional operation of the device at these or any other conditions beyond those indicated in
the "Recommended Operating Conditions/Characteristics" of this specification is not implied. Exposure to absolute
maximum ratings conditions for extended periods may affect device reliability.
3.4.1. Storage and Shelf Life
Storage has no influence on the electrical and magnetic characteristics of the sensors. However, under disadvanta-
geous conditions, extended storage time can lead to alteration of the lead plating, which affects the soldering pro-
cess.
The permissible storage time (shelf life) of the sensors would be a minimum of 12 months, beginning from the date
of manufacture, if they are stored in the original package at a maximum of 40 ∞C ambient temperature and maximum
of 90% relative humidity.
3.5. Recommended Operating Conditions
Symbol
Parameter
Pin No.
Min.
Max.
Unit
V
DD
Supply Voltage
1
-
8.5
8.5
V
V
DD
Supply Voltage
1
-
14.4
1) 2)
14.4
1) 2)
V
-
I
DD
Reverse Supply Current
1
-
50
1)
mA
I
Z
Current through Protection Device
1 or 3
-
300
4)
300
4)
mA
V
OUT
Output Voltage
3
-
5
6)
-
5
6)
8.5
3)
14.4
3) 2)
V
V
OUT
-
V
DD
Excess of Output Voltage
over Supply Voltage
3,1
2
V
I
OUT
Continuous Output Current
3
-
10
10
mA
t
Sh
Output Short Circuit Duration
3
-
10
min
T
J
Junction Temperature Range
-
40
-
40
170
5)
150
∞C
∞C
N
PROG
Number of Programming Cycles
-
100
1)
as long as T
Jmax
is not exceeded
2)
t < 10 min (V
DDmin
=
-
15 V for t < 1 min, V
DDmax
= 16 V for t < 1 min)
3)
as long as T
Jmax
is not exceeded, output is not protected to external 14 V-line (or to
-
14 V)
4)
t < 2 ms
5)
t < 1000h
6)
internal protection resistor = 100
Symbol
Parameter
Pin No.
Min.
Typ.
Max.
Unit
V
DD
Supply Voltage
1
4.5
5
5.5
V
I
OUT
Continuous Output Current
3
-
1
-
1
mA
R
L
Load Resistor
3
4.5
-
-
k
C
L
Load Capacitance
3
0.33
10
100
nF

HAL 810
DATA SHEET
14
Nov. 22, 2002; 6251-536-2DS
Micronas
3.6. Electrical Characteristics
at T
J
=
-
40 ∞C to +170 ∞C, V
DD
= 4.5 V to 5.5 V, after programming, if not otherwise specified in Conditions.
Typical Characteristics for T
J
= 25 ∞C and V
DD
= 5 V.
Symbol
Parameter
Pin No.
Min.
Typ.
Max.
Unit
Conditions
I
DD
Supply Current
over Temperature Range
1
7
10
mA
V
DDZ
Overvoltage Protection
at Supply
1
17.5
20
V
I
DD
= 25 mA, T
J
= 25 ∞C, t = 20 ms
V
OZ
Overvoltage Protection
at Output
3
17
19.5
V
I
O
= 10 mA, T
J
= 25 ∞C, t = 20 ms
Output Duty Cycle Resolution
3
11
bit
1)
E
A
Accuracy Error over all
3
-
2
0
2
%
2)
INL
Non-Linearity of Output Duty
Cycle over Temperature
3
-
1
0
1
%
1)
DC
MIN-
DUTY
Accuracy of Minimum Duty Cycle
over Temperature Range
3
-
1
0
1
%
DC
MAX-
DUTY
Accuracy of Maximum Duty
Cycle over Temperature Range
3
-
1
0
1
%
V
OUTH
Output High Voltage
3
4.8
V
V
DD
= 5 V,
-
1 mA
I
OUT
1
mA
V
OUTL
Output Low Voltage
3
0.2
V
V
DD
= 5 V,
-
1 mA
I
OUT
1 mA
f
PWM
PWM Output Frequency over
Temperature Range
-
105
125
145
Hz
f
ADC
Internal ADC Frequency over
Temperature Range
-
110
128
150
kHz
t
POD
Power-Up Time (Time to reach
valid duty cycle)
25
ms
R
OUT
Output Resistance over
Recommended Operating
Range
3
-
1
10
V
OUTLmax
V
OUT
V
OUTHmin
R
thJA
TO-92UT
Thermal Resistance Junction to
Soldering Point
-
-
150
200
K/W
1)
if the Hall IC is programmed accordingly
2)
estimation of over all accuracy, if more than 50% of the selected magnetic field range are used and the Hall IC is programmed accordingly
DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
15
3.7. Magnetic Characteristics
at T
J
=
-
40 ∞C to +170 ∞C, V
DD
= 4.5 V to 5.5 V, after programming, if not otherwise specified in Conditions.
Typical Characteristics for T
J
= 25 ∞C and V
DD
= 5 V.
3.8. Open-Circuit Detection
at T
J
=
-
40 ∞C to +170 ∞C, Typical Characteristics for T
J
= 25 ∞C
3.9. Typical Characteristics
Symbol
Parameter
Pin No.
Min.
Typ.
Max.
Unit
Test Conditions
B
Offset
Magnetic Offset
3
-
1
0
1
mT
B = 0 mT, T
J
= 25 ∞C
B
Offset
/
T
Magnetic Offset Change
due to T
J
-
15
0
15
µ
T/K
B = 0 mT
Symbol
Parameter
Pin No.
Min.
Typ.
Max.
Unit
Test Conditions
V
OUT
Output voltage
at open V
DD
line
3
0
0
0.2
V
V
DD
= 5 V
R
L
= 10 k
to GND
V
OUT
Output voltage at
open GND line
3
4.7
4.8
5
V
V
DD
= 5 V
R
L
= 10 k
to GND
≠20
≠15
≠10
≠5
0
5
10
15
20
≠15 ≠10
≠5
0
5
10
15
20 V
mA
V
DD
I
DD
T
A
= ≠40
∞
C
T
A
= 25
∞
C
T
A
=150
∞
C
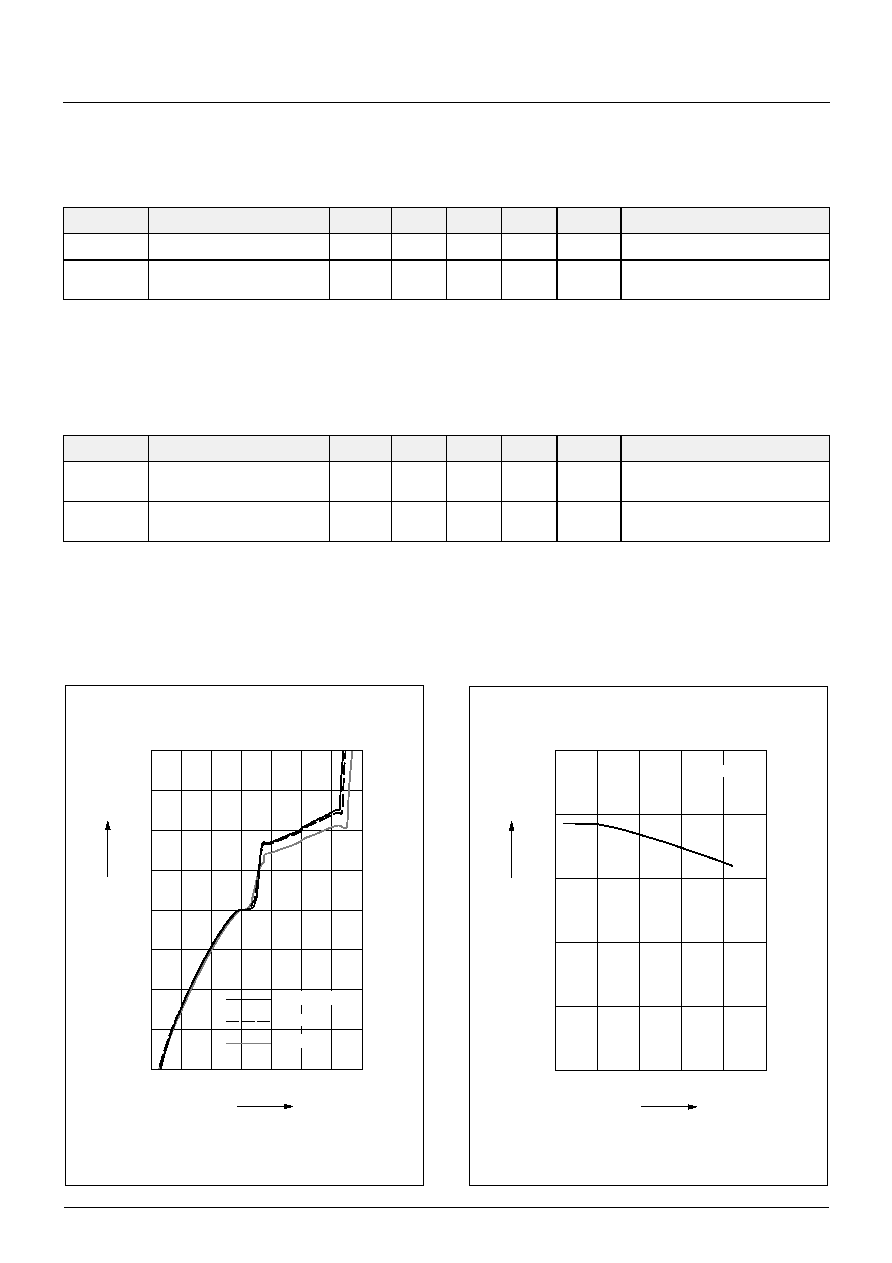
Fig. 3≠2: Typical current consumption
versus supply voltage
0
2
4
6
8
10
≠50
0
50
100
150
200
∞
C
mA
T
A
I
DD
V
DD
= 5 V
Fig. 3≠3: Typical current consumption
versus ambient temperature

HAL 810
DATA SHEET
16
Nov. 22, 2002; 6251-536-2DS
Micronas
0
2
4
6
8
10
≠1.5
≠1.0
≠0.5
0.0
0.5
1.0
1.5 mA
mA
I
OUT
I
DD
T
A
= 25
∞
C
V
DD
= 5 V
Fig. 3≠4: Typical current consumption
versus output current
≠1
≠0.8
≠0.6
≠0.4
≠0.2
≠0.0
0.2
0.4
0.6
0.8
1.0
≠50
0
50
100
150
200
∞
C
mT
T
A
B
Offset
TC = 16, TCSQ = 8
TC = 0, TCSQ = 12
TC = ≠20, TCSQ = 12
Fig. 3≠5: Typical magnetic offset
versus ambient temperature
0
20
40
60
80
100
120
≠50
0
50
100
150
200
∞
C
%
T
A
1/sensitivity
TC = 16, TCSQ = 8
TC = 0, TCSQ = 12
TC = ≠20, TCSQ = 12
TC = ≠31, TCSQ = 0
Fig. 3≠6: Typical 1/sensitivity
versus ambient temperature
≠1
≠0.8
≠0.6
≠0.4
≠0.2
≠0.0
0.2
0.4
0.6
0.8
1.0
≠40
≠20
0
20
40 mT
%
B
INL
Range = 30 mT
Fig. 3≠7: Typical nonlinearity
versus magnetic field

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
17
4. Application Notes
4.1. Application Circuit
For EMC protection, it is recommended to connect one
ceramic 4.7 nF capacitor each between ground and
the supply voltage, respectively the output pin. In addi-
tion, the input of the controller unit should be pulled-
down with a 4.7 kOhm resistor and a ceramic 4.7 nF
capacitor.
Please note that during programming, the sensor will
be supplied repeatedly with the programming voltage
of 12 V for 100 ms. All components connected to the
V
DD
line at this time must be able to resist this voltage.
Fig. 4≠1: Recommended application circuit
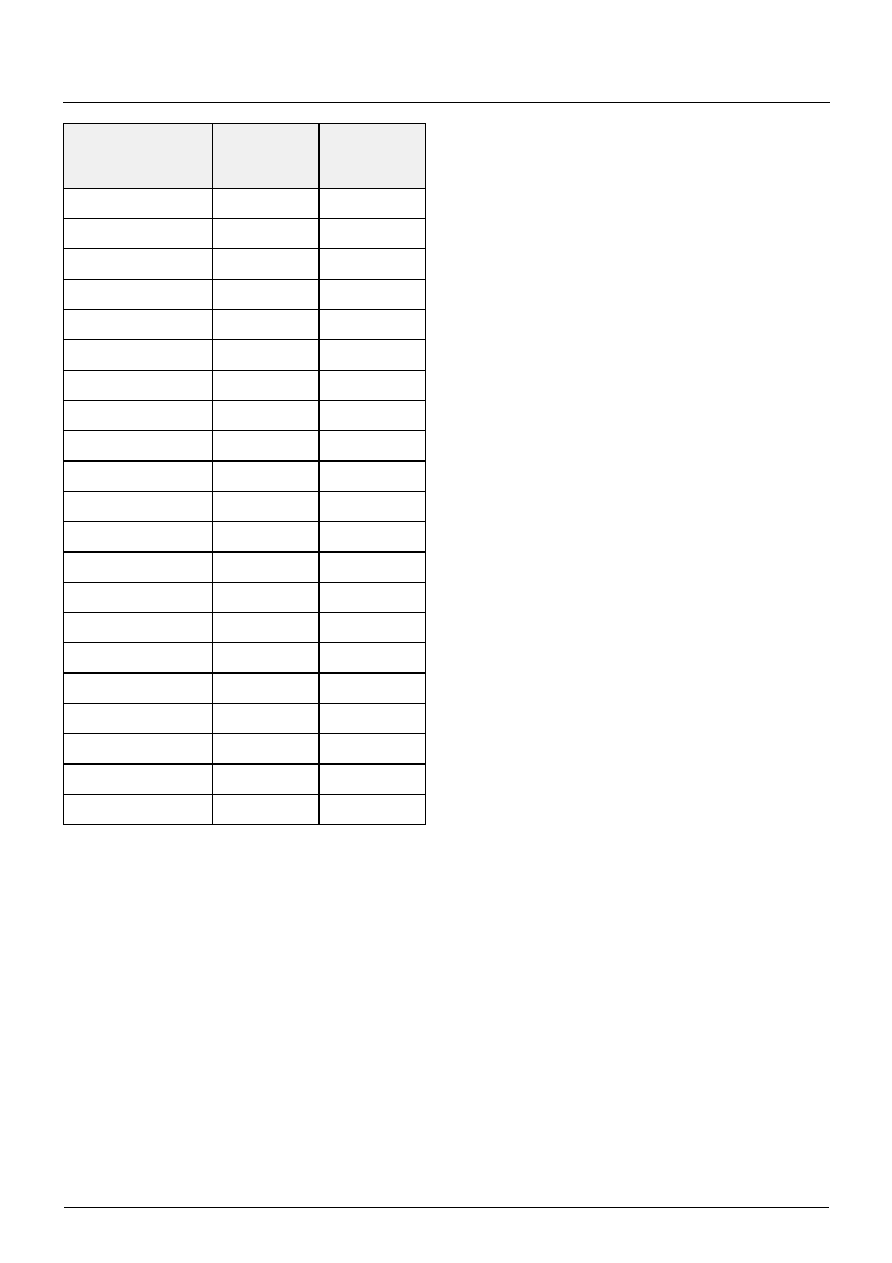
4.2. Temperature Compensation
The relationship between the temperature coefficient
of the magnet and the corresponding TC and TCSQ
codes for linear compensation is given in the following
table. In addition to the linear change of the magnetic
field with temperature, the curvature can be adjusted
as well. For this purpose, other TC and TCSQ combi-
nations are required which are not shown in the table.
Please contact Micronas for more detailed information
on this higher order temperature compensation.
The HAL 800 and HAL 810 contain the same tempera-
ture compensation circuits. If an optimal setting for the
HAL 800 is already available, the same settings may
be used for the HAL 810.
OUT
V
DD
GND
4.7 nF
HAL810
4.7 k
µ
C
4.7 nF
4.7 nF
Temperature
Coefficient of
Magnet (ppm/K)
TC
TCSQ
400
31
6
300
28
7
200
24
8
100
21
9
0
18
10
-
50
17
10
-
90
16
11
-
130
15
11
-
170
14
11
-
200
13
12
-
240
12
12
-
280
11
12
-
320
10
13
-
360
9
13
-
410
8
13
-
450
7
13
-
500
6
14
-
550
5
14
-
600
4
14
-
650
3
14
-
700
2
15
-
750
1
15
-
810
0
15
-
860
-
1
16
-
910
-
2
16
-
960
-
3
16
-
1020
-
4
17
-
1070
-
5
17
-
1120
-
6
17
-
1180
-
7
18
-
1250
-
8
18
-
1320
-
9
19
HAL 810
DATA SHEET
18
Nov. 22, 2002; 6251-536-2DS
Micronas
4.3. Undervoltage Behavior
In a voltage range of below 4.5 V to approximately
3.5 V, the typical operation of the HAL 810 is given
and predictable for the most sensors. Some of the
parameters may be out of the specification. Below
about 3.5 V, the digital processing is reset. If the sup-
ply voltage rises above approx. 3.5 V once again, a
startup time of about 20 µs elapses, for the digital sig-
nal processing to occur.
4.4. Ambient Temperature
Due to the internal power dissipation, the temperature
on the silicon chip (junction temperature T
J
) is higher
than the temperature outside the package (ambient
temperature T
A
).
T
J
= T
A
+
T
At static conditions, the following equation is valid:
T = I
DD
* V
DD
* R
thJA
For typical values, use the typical parameters. For
worst case calculation, use the maximum parameters
for I
DD
and R
th
, and the maximum value for V
DD
from
the application.
For V
DD
= 5.5 V, R
th
= 200 K/W and I
DD
= 10 mA the
temperature difference
T = 11 K.
For all sensors, the junction temperature T
J
is speci-
fied. The maximum ambient temperature T
Amax
can be
calculated as:
T
Amax
= T
Jmax
-
T
4.5. EMC and ESD
The HAL 810 is designed for a stabilized 5 V supply.
Interferences and disturbances conducted along the
12 V on-board system (product standards DIN40839
part 1 or ISO 7637 part 1) are not relevant for these
applications.
For applications with disturbances by capacitive or
inductive coupling on the supply line or radiated distur-
bances, the application circuit shown in Fig. 4≠1 is rec-
ommended. Applications with this arrangement
passed the EMC tests according to the product stan-
dards DIN 40839 part 3 (Electrical transient transmis-
sion by capacitive or inductive coupling) and part 4
(Radiated disturbances).
Please contact Micronas for the detailed investigation
reports with the EMC and ESD results.
-
1380
-
10
19
-
1430
-
11
20
-
1500
-
12
20
-
1570
-
13
20
-
1640
-
14
21
-
1710
-
15
21
-
1780
-
16
22
-
1870
-
17
22
-
1950
-
18
23
-
2030
-
19
23
-
2100
-
20
24
-
2180
-
21
24
-
2270
-
22
25
-
2420
-
24
26
-
2500
-
25
27
-
2600
-
26
27
-
2700
-
27
28
-
2800
-
28
28
-
2900
-
29
29
-
3000
-
30
30
-
3100
-
31
31
Temperature
Coefficient of
Magnet (ppm/K)
TC
TCSQ

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
19
5. Programming of the Sensor
5.1. Definition of Programming Pulses
The sensor is addressed by modulating a serial tele-
gram on the supply voltage. The sensor answers with
a serial telegram on the output pin.
The bits in the serial telegram have a different bit time
for the V
DD
-line and the output. The bit time for the
V
DD
-line is defined through the length of the Sync Bit
at the beginning of each telegram. The bit time for the
output is defined through the Acknowledge Bit.
A logical "0" is coded as no voltage change within the
bit time. A logical "1" is coded as a voltage change
between 50% and 80% of the bit time. After each bit, a
voltage change occurs.
5.2. Definition of the Telegram
Each telegram starts with the Sync Bit (logical 0), 3
bits for the Command (COM), the Command Parity Bit
(CP), 4 bits for the Address (ADR), and the Address
Parity Bit (AP).
There are different telegram formats:
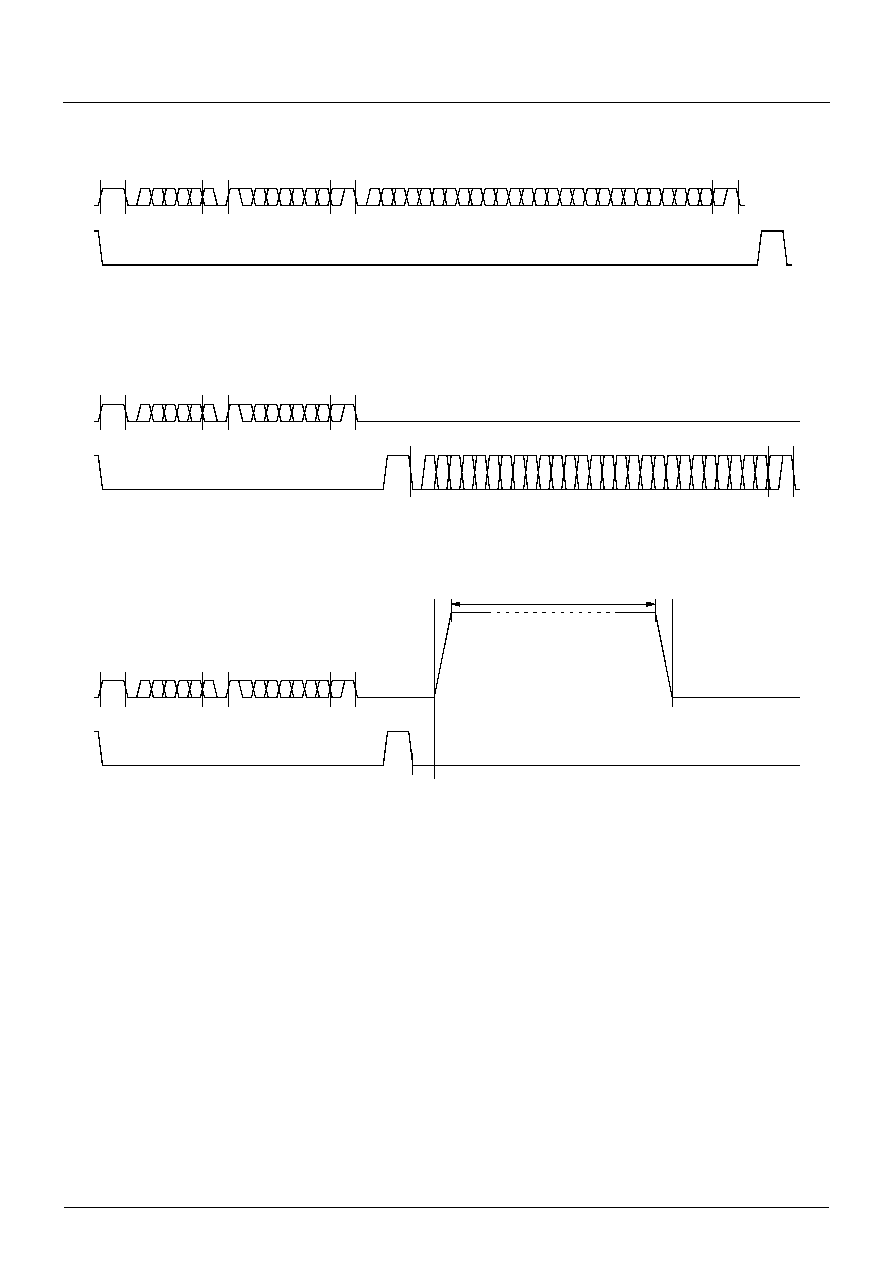
≠ Write a register (see Fig. 5≠2)
After the AP Bit, follow 14 Data Bits (DAT) and the
Data Parity Bit (DP). If the telegram is valid and the
command has been processed, the sensor answers
with an Acknowledge Bit (logical 0) on the output.
≠ Read a register (see Fig. 5≠3)
After evaluating this command, the sensor answers
with the Acknowledge Bit, 14 Data Bits, and the
Data Parity Bit on the output.
≠ Programming the EEPROM cells (see Fig. 5≠4)
After evaluating this command, the sensor answers
with the Acknowledge Bit. After the delay time t
w
,
the supply voltage rises up to the programming volt-
age.
Fig. 5≠1: Definition of logical 0 and 1 bit
Note: Please contact your supplier if programming
board firmware is older than version 3.50.
t
r
t
f
t
p0
t
p0
logical 0
V
DDH
V
DDL
or
t
p0
logical 1
V
DDH
V
DDL
or
t
p0
t
p1
t
p1
Table 5≠1: Telegram parameters
Symbol
Parameter
Pin
Min.
Typ.
Max.
Unit
Remarks
V
DDL
Supply Voltage for Low Level
during Programming
1
5
5.6
6
V
V
DDH
Supply Voltage for High Level
during Programming
1
6.8
8.0
8.5
V
t
r
Rise time
1
0.05
ms
t
f
Fall time
1
0.05
ms
t
p0
Bit time on V
DD
1
1.7
1.75
1.8
ms
t
p0
is defined through the Sync Bit
t
pOUT
Bit time on output pin
3
2
3
4
ms
t
pOUT
is defined through the
Acknowledge Bit
t
p1
Voltage Change for logical 1
1, 3
50
65
80
%
% of t
p0
or t
pOUT
V
DDPROG
Supply Voltage for
Programming the EEPROM
1
12.4
12.5
12.6
V
t
PROG
Programming Time for EEPROM
1
95
100
105
ms
t
rp
Rise time of programming voltage
1
0.2
0.5
1
ms
t
fp
Fall time of programming voltage
1
0
1
ms
t
w
Delay time of programming voltage
after Acknowledge
1
0.5
0.7
1
ms
HAL 810
DATA SHEET
20
Nov. 22, 2002; 6251-536-2DS
Micronas
Fig. 5≠2: Telegram for coding a Write command
Fig. 5≠3: Telegram for coding a Read command
Fig. 5≠4: Telegram for coding the EEPROM programming
Sync
COM
CP
ADR
AP
DAT
DP
Acknowledge
V
DD
V
OUT
WRITE
Sync
COM
CP
ADR
AP
DAT
DP
Acknowledge
V
DD
V
OUT
READ
Sync
COM
CP
ADR
AP
t
PROG
Acknowledge
V
DD
V
OUT
ERASE, PROM, LOCK, and LOCKI
t
rp
t
fp
t
w
V
DDPROG

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
21
5.3. Telegram Codes
Sync Bit
Each telegram starts with the Sync Bit. This logical "0"
pulse defines the exact timing for t
p0
.
Command Bits (COM)
The Command code contains 3 bits and is a binary
number. Table 5≠2 shows the available commands
and the corresponding codes for the HAL 810.
Command Parity Bit (CP)
This parity bit is "1" if the number of zeros within the 3
Command Bits is uneven. The parity bit is "0", if the
number of zeros is even.
Address Bits (ADR)
The Address code contains 4 bits and is a binary num-
ber. Table 5≠3 shows the available addresses for the
HAL 810 registers.
Address Parity Bit (AP)
This parity bit is "1" if the number of zeros within the 4
Address bits is uneven. The parity bit is "0" if the num-
ber of zeros is even.
Data Bits (DAT)
The 14 Data Bits contain the register information.
The registers use different number formats for the
Data Bits. These formats are explained in Section 5.4.
In the Write command, the last bits are valid. If, for
example, the TC register (6 bits) is written, only the
last 6 bits are valid.
In the Read command, the first bits are valid. If, for
example, the TC register (6 bits) is read, only the first 6
bits are valid.
Data Parity Bit (DP)
This parity bit is "1" if the number of zeros within the
binary number is even. The parity bit is "0" if the num-
ber of zeros is uneven.
Acknowledge
After each telegram, the output answers with the
Acknowledge signal. This logical "0" pulse defines the
exact timing for t
pOUT
.
Note: The Micronas lock bit (LOCKI) has already been set during production and cannot be reset.
Table 5≠2: Available commands
Command
Code
Explanation
READ
2
read a register
WRITE
3
write a register
PROM
4
program all nonvolatile registers (except the lock bits)
ERASE
5
erase all nonvolatile registers (except the lock bits)
LOCKI
6
lock Micronas lockable register
LOCK
7
lock the whole device and disable programming

HAL 810
DATA SHEET
22
Nov. 22, 2002; 6251-536-2DS
Micronas
5.4. Number Formats
Binary number:
The most significant bit is given as first, the least sig-
nificant bit as last digit.
Example:
101001
represents 41 decimal.
Signed binary number:
The first digit represents the sign of the following
binary number (1 for negative, 0 for positive sign).
Example:
0101001
represents +41 decimal
1101001
represents
-
41 decimal
Two-complementary number:
The first digit of positive numbers is "0", the rest of the
number is a binary number. Negative numbers start
with "1". In order to calculate the absolute value of the
number, calculate the complement of the remaining
digits and add "1".
Example:
0101001
represents +41 decimal
1010111
represents
-
41 decimal
Table 5≠4: Micronas registers (read only for customers)
Table 5≠3: Available register addresses
Register
Code
Data
Bits
Format
Customer
Remark
MIN-DUTY
1
10
binary
read/write/program
Minimum Duty Cycle
MAX-DUTY
2
11
binary
read/write/program
Maximum Duty Cycle
DCOQ
3
11
two compl.
binary
read/write/program
Output Duty Cycle at zero
ADC-Readout
DCSENSITIVITY
4
14
signed binary
read/write/program
Increase of Output Duty
Cycle with ADC-Readout
MODE
5
6
binary
read/write/program
Range and filter settings
LOCKR
6
1
binary
lock
Lock Bit for customer
registers
ADC-READOUT
7
14
two compl.
binary
read
Output of A/D converter
(internal magnetic signal)
TC
11
6
signed binary
read/write/program
Temperature compensa-
tion coefficient
TCSQ
12
5
binary
read/write/program
Temperature compensa-
tion coefficient
Register
Code
Data
Bits
Format
Remark
OFFSET
8
5
two compl. binary
ADC offset adjustment
FOSCAD
9
5
binary
Oscillator frequency adjustment
SPECIAL
13
8
special settings
IMLOCK
14
1
binary
Lock Bit for the Micronas registers

DATA SHEET
HAL 810
Micronas
Nov. 22, 2002; 6251-536-2DS
23
5.5. Register Information
MIN-DUTY
The register range is from 0 up to 1023.
≠ The register value is calculated with:
MAX-DUTY
≠ The register range is from 0 up to 2047.
≠ The register value is calculated with:
DCOQ
≠ The register range is from
-
1024 up to 1023.
≠ The register value is calculated with:
DCSENSITIVITY
≠ The register range is from
-
8192 up to 8191.
≠ The register value is calculated with:
TC and TCSQ
≠ The TC register range is from
-
31 up to 31.
≠ The TCSQ register range is from 0 up to 31.
Please refer Section 4.2. on page 17 for the recom-
mended values.
MODE
≠ The register range is from 0 up to 63 and contains
the settings for FILTER and RANGE:
Please refer Section 2.2. on page 7 for the available
FILTER and RANGE values.
ADC-READOUT
≠ This register is read only.
≠ The register range is from
-
8192 up to 8191.
5.6. Programming Information
If the content of any register (except the lock registers)
is to be changed, the desired value must first be writ-
ten into the corresponding RAM register. Before read-
ing out the RAM register again, the register value must
be permanently stored in the EEPROM.
Permanently storing a value in the EEPROM is done
by first sending an ERASE command followed by
sending a PROM command. The address within the
ERASE and PROM commands is not important.
ERASE and PROM act on all registers in parallel.
If all HAL 810 registers are to be changed, all writing
commands can be sent one after the other, followed by
sending one ERASE and PROM command at the end.
Note: For production and qualification tests, it is
strongly recommended to set the LOCK bit after
final adjustment and programming of HAL 810.
The LOCK function is active after the next
power-up of the sensor.
Min-Duty
100%
* 2048
MIN-DUTY =
Max-Duty
100%
* 2048
MAX-DUTY =
DC
OQ
100%
* 1024
DCOQ =
DCSENSITIVITY = DCSensitivity * 2048
MODE = FILTER * 8 + RANGE

All information and data contained in this data sheet are without any
commitment, are not to be considered as an offer for conclusion of a
contract, nor shall they be construed as to create any liability. Any new
issue of this data sheet invalidates previous issues. Product availability
and delivery are exclusively subject to our respective order confirmation
form; the same applies to orders based on development samples deliv-
ered. By this publication, Micronas GmbH does not assume responsibil-
ity for patent infringements or other rights of third parties which may
result from its use.
Further, Micronas GmbH reserves the right to revise this publication
and to make changes to its content, at any time, without obligation to
notify any person or entity of such revisions or changes.
No part of this publication may be reproduced, photocopied, stored on a
retrieval system, or transmitted without the express written consent of
Micronas GmbH.
HAL 810
DATA SHEET
24
Nov. 22, 2002; 6251-536-2DS
Micronas
Micronas GmbH
Hans-Bunte-Strasse 19
D-79108 Freiburg (Germany)
P.O. Box 840
D-79008 Freiburg (Germany)
Tel. +49-761-517-0
Fax +49-761-517-2174
E-mail: docservice@micronas.com
Internet: www.micronas.com
Printed in Germany
Order No. 6251-536-2DS
6. Data Sheet History
1. Data Sheet: "HAL 810 Programmable Linear Hall
Effect Sensor", Aug. 16, 2002, 6251-536-1DS. First
release of the data sheet.
2. Data Sheet: "HAL 810 Programmable Linear Hall
Effect Sensor", Nov. 22, 2002, 6251-536-2DS. Sec-
ond release of the data sheet. Major changes:
≠ Fig. 2≠3: Diagram "Details of EEPROM and Digital
Signal Processing" changed
≠ Fig. 2≠5: Diagram "Example for output characteris-
tics" changed
≠ DCOQ register programmable from
-
100% to 100%
in steps of 0.0976%
≠ Clamping function: minimum duty cycle programma-
ble between 0% and 50% in steps of 0.0488%, max-
imum duty cycle programmable between 0% and
100% in steps of 0.0488%
≠ Changes in Register Information.