
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regarding the suitability
of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and
all liability, including without limitation consequential or incidental damages. "Typical" parameters can and do vary in different applications. All operating parameters, including
"Typicals" must be validated for each customer application by customer's technical experts. Motorola does not convey any license under its patent rights nor the rights of others.
Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to
support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury or death may occur. Should Buyer
purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola and its officers, employees, subsidiaries,
affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal
injury or death associated with such unintended or unauthorized use, even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part.
MOTOROLA and
!
are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
© MOTOROLA, INC. 1995
HC11
MC68HC11F1
Technical Data


MC68HC11F1
MOTOROLA
TECHNICAL DATA
iii
Paragraph
Title
Page
SECTION 1INTRODUCTION
1.1
Features .................................................................................................... 1-1
SECTION 2 PIN DESCRIPTIONS
2.1
V
DD
and V
SS
.............................................................................................. 2-2
2.2
Reset (RESET) .......................................................................................... 2-3
2.3
E-Clock Output (E) .................................................................................... 2-3
2.4
Crystal Driver and External Clock Input (XTAL, EXTAL) ........................... 2-3
2.5
Four Times E-Clock Frequency Output (4XOUT) ..................................... 2-5
2.6
Interrupt Request (IRQ) ............................................................................. 2-5
2.7
Non-Maskable Interrupt (XIRQ) ................................................................. 2-5
2.8
MODA and MODB (MODA/LIR and MODB/V
STBY
) .................................. 2-6
2.9
V
RH
and V
RL
.............................................................................................. 2-6
2.10
R/W ........................................................................................................... 2-6
2.11
Port Signals ............................................................................................... 2-6
2.11.1
Port A ................................................................................................ 2-7
2.11.2
Port B ................................................................................................ 2-8
2.11.3
Port C ................................................................................................ 2-8
2.11.4
Port D ................................................................................................ 2-8
2.11.5
Port E ................................................................................................ 2-9
2.11.6
Port F ................................................................................................. 2-9
2.11.7
Port G ................................................................................................ 2-9
SECTION 3 CENTRAL PROCESSING UNIT
3.1
CPU Registers ........................................................................................... 3-1
3.1.1
Accumulators A, B, and D ................................................................. 3-2
3.1.2
Index Register X (IX) ......................................................................... 3-3
3.1.3
Index Register Y (IY) ......................................................................... 3-3
3.1.4
Stack Pointer (SP) ............................................................................. 3-3
3.1.5
Program Counter (PC) ...................................................................... 3-5
3.1.6
Condition Code Register (CCR) ........................................................ 3-5
3.1.6.1
Carry/Borrow (C) ....................................................................... 3-5
3.1.6.2
Overflow (V) .............................................................................. 3-5
3.1.6.3
Zero (Z) ..................................................................................... 3-6
3.1.6.4
Negative (N) .............................................................................. 3-6
3.1.6.5
Interrupt Mask (I) ....................................................................... 3-6
3.1.6.6
Half Carry (H) ............................................................................ 3-6
3.1.6.7
X Interrupt Mask (X) .................................................................. 3-6
3.1.6.8
Stop Disable (S) ........................................................................ 3-7
TABLE OF CONTENTS

MOTOROLA
MC68HC11F1
iv
TECHNICAL DATA
(Continued)
Paragraph
Title
Page
TABLE OF CONTENTS
3.2
Data Types ................................................................................................ 3-7
3.3
Opcodes and Operands ............................................................................ 3-7
3.4
Addressing Modes ..................................................................................... 3-7
3.4.1
Immediate .......................................................................................... 3-7
3.4.2
Direct ................................................................................................. 3-8
3.4.3
Extended ........................................................................................... 3-8
3.4.4
Indexed .............................................................................................. 3-8
3.4.5
Inherent ............................................................................................. 3-8
3.4.6
Relative ............................................................................................. 3-8
3.5
Instruction Set ........................................................................................... 3-8
SECTION 4OPERATING MODES AND ON-CHIP MEMORY
4.1
Operating Modes ....................................................................................... 4-1
4.1.1
Single-Chip Operating Mode ............................................................. 4-1
4.1.2
Expanded Operating Mode ............................................................... 4-1
4.1.3
Special Test Mode ............................................................................. 4-1
4.1.4
Special Bootstrap Mode .................................................................... 4-1
4.2
On-Chip Memory ....................................................................................... 4-2
4.2.1
Mapping Allocations .......................................................................... 4-2
4.2.2
Memory Map ..................................................................................... 4-3
4.2.2.1
RAM .......................................................................................... 4-3
4.2.2.2
Bootloader ROM ....................................................................... 4-4
4.2.2.3
EEPROM ................................................................................... 4-4
4.2.3
Registers ........................................................................................... 4-4
4.3
System Initialization ................................................................................... 4-6
4.3.1
Mode Selection .................................................................................. 4-7
4.3.1.1
HPRIO Register ........................................................................ 4-8
4.3.2
Initialization ........................................................................................ 4-9
4.3.2.1
CONFIG Register ...................................................................... 4-9
4.3.2.2
INIT Register ........................................................................... 4-10
4.3.2.3
OPTION Register .................................................................... 4-11
4.3.2.4
OPT2 Register ........................................................................ 4-12
4.3.2.5
Block Protect Register (BPROT) ............................................. 4-13
4.4
EEPROM and CONFIG Register ............................................................ 4-14
4.4.1
EEPROM ......................................................................................... 4-14
4.4.1.1
EEPROM Programming .......................................................... 4-14
4.4.1.2
EEPROM Bulk Erase .............................................................. 4-15
4.4.1.3
EEPROM Row Erase .............................................................. 4-15
4.4.1.4
EEPROM Byte Erase .............................................................. 4-16
4.4.2
PPROG EEPROM Programming Control Register ......................... 4-16
4.4.3
CONFIG Register Programming ..................................................... 4-17

MC68HC11F1
MOTOROLA
TECHNICAL DATA
v
(Continued)
Paragraph
Title
Page
TABLE OF CONTENTS
4.5
Chip Selects ............................................................................................ 4-18
4.5.1
Program Chip Select ....................................................................... 4-18
4.5.2
I/O Chip Selects .............................................................................. 4-18
4.5.3
General-Purpose Chip Select .......................................................... 4-19
SECTION 5 RESETS AND INTERRUPTS
5.1
Resets ....................................................................................................... 5-1
5.1.1
Power-On Reset ................................................................................ 5-1
5.1.2
External Reset (RESET) ................................................................... 5-1
5.1.3
Computer Operating Properly (COP) Reset ...................................... 5-2
5.1.4
Clock Monitor Reset .......................................................................... 5-2
5.1.5
OPTION Register .............................................................................. 5-3
5.1.6
CONFIG Register .............................................................................. 5-4
5.2
Effects of Reset ......................................................................................... 5-4
5.2.1
Central Processing Unit ..................................................................... 5-5
5.2.2
Memory Map ..................................................................................... 5-5
5.2.3
Parallel I/O ......................................................................................... 5-5
5.2.4
Timer ................................................................................................. 5-5
5.2.5
Real-Time Interrupt (RTI) .................................................................. 5-5
5.2.6
Pulse Accumulator ............................................................................ 5-6
5.2.7
Computer Operating Properly (COP) ................................................ 5-6
5.2.8
Serial Communications Interface (SCI) ............................................. 5-6
5.2.9
Serial Peripheral Interface (SPI) ........................................................ 5-6
5.2.10
Analog-to-Digital Converter ............................................................... 5-6
5.2.11
System .............................................................................................. 5-6
5.3
Reset and Interrupt Priority ....................................................................... 5-6
5.3.1
Highest Priority Interrupt and Miscellaneous Register ...................... 5-7
5.4
Interrupts ................................................................................................... 5-8
5.4.1
Interrupt Recognition and Register Stacking ..................................... 5-9
5.4.2
Non-Maskable Interrupt Request (XIRQ) ........................................ 5-10
5.4.3
Illegal Opcode Trap ......................................................................... 5-10
5.4.4
Software Interrupt ............................................................................ 5-11
5.4.5
Maskable Interrupts ......................................................................... 5-11
5.4.6
Reset and Interrupt Processing ....................................................... 5-11
5.5
Low Power Operation .............................................................................. 5-16
5.5.1
WAIT ............................................................................................... 5-17
5.5.2
STOP ............................................................................................... 5-17
SECTION 6 PARALLEL INPUT/OUTPUT
6.1
Port A ........................................................................................................ 6-1

MOTOROLA
MC68HC11F1
vi
TECHNICAL DATA
(Continued)
Paragraph
Title
Page
TABLE OF CONTENTS
6.2
Port B ........................................................................................................ 6-2
6.3
Port C ........................................................................................................ 6-2
6.4
Port D ........................................................................................................ 6-3
6.5
Port E ........................................................................................................ 6-4
6.6
Port F ......................................................................................................... 6-4
6.7
Port G ........................................................................................................ 6-5
6.8
System Configuration Options 2 ................................................................ 6-5
SECTION 7 SERIAL COMMUNICATIONS INTERFACE
7.1
Data Format .............................................................................................. 7-1
7.2
Transmit Operation .................................................................................... 7-1
7.3
Receive Operation ..................................................................................... 7-2
7.4
Wakeup Feature ........................................................................................ 7-4
7.4.1
Idle-Line Wakeup .............................................................................. 7-4
7.4.2
Address-Mark Wakeup ...................................................................... 7-4
7.5
SCI Error Detection ................................................................................... 7-5
7.6
SCI Registers ............................................................................................ 7-5
7.6.1
Serial Communications Data Register .............................................. 7-5
7.6.2
Serial Communications Control Register 1 ....................................... 7-5
7.6.3
Serial Communications Control Register 2 ....................................... 7-6
7.6.4
Serial Communication Status Register .............................................. 7-7
7.6.5
Baud Rate Register ........................................................................... 7-8
7.7
Status Flags and Interrupts ..................................................................... 7-10
7.7.1
Receiver Flags ................................................................................ 7-11
SECTION 8 SERIAL PERIPHERAL INTERFACE
8.1
Functional Description ............................................................................... 8-1
8.2
SPI Transfer Formats ................................................................................ 8-2
8.2.1
Clock Phase and Polarity Controls .................................................... 8-3
8.3
SPI Signals ................................................................................................ 8-3
8.3.1
Master In Slave Out ........................................................................... 8-4
8.3.2
Master Out Slave In ........................................................................... 8-4
8.3.3
Serial Clock ....................................................................................... 8-4
8.3.4
Slave Select ...................................................................................... 8-4
8.4
SPI System Errors ..................................................................................... 8-4
8.5
SPI Registers ............................................................................................ 8-5
8.5.1
Serial Peripheral Control ................................................................... 8-5
8.5.2
Serial Peripheral Status ..................................................................... 8-7
8.5.3
Serial Peripheral Data Register ......................................................... 8-7

MC68HC11F1
MOTOROLA
TECHNICAL DATA
vii
(Continued)
Paragraph
Title
Page
TABLE OF CONTENTS
SECTION 9 TIMING SYSTEM
9.1
Timer Structure .......................................................................................... 9-3
9.2
Input Capture ............................................................................................. 9-5
9.2.1
Timer Control Register 2 ................................................................... 9-5
9.2.2
Timer Input Capture Registers .......................................................... 9-6
9.2.3
Timer Input Capture 4/Output Compare 5 Register .......................... 9-6
9.3
Output Compare ........................................................................................ 9-6
9.3.1
Timer Output Compare Registers ..................................................... 9-7
9.3.2
Timer Compare Force Register ......................................................... 9-8
9.3.3
Output Compare Mask Registers ...................................................... 9-8
9.3.4
Output Compare Data Register ......................................................... 9-9
9.3.5
Timer Counter Register ..................................................................... 9-9
9.3.6
Timer Control Register 1 ................................................................... 9-9
9.3.7
Timer Interrupt Mask Register 1 ...................................................... 9-10
9.3.8
Timer Interrupt Flag Register 1 ....................................................... 9-11
9.3.9
Timer Interrupt Mask Register 2 ...................................................... 9-11
9.3.10
Timer Interrupt Flag Register 2 ....................................................... 9-12
9.4
Real-Time Interrupt ................................................................................. 9-12
9.4.1
Timer Interrupt Mask Register 2 ...................................................... 9-13
9.4.2
Timer Interrupt Flag Register 2 ....................................................... 9-14
9.4.3
Pulse Accumulator Control Register ............................................... 9-14
9.5
Computer Operating Properly Watchdog Function ................................. 9-15
9.6
Pulse Accumulator .................................................................................. 9-15
9.6.1
Pulse Accumulator Control Register ............................................... 9-16
9.6.2
Pulse Accumulator Count Register ................................................. 9-17
9.6.3
Pulse Accumulator Status and Interrupt Bits ................................... 9-18
SECTION 10 ANALOG-TO-DIGITAL CONVERTER
10.1
Overview ................................................................................................. 10-1
10.1.1
Multiplexer ....................................................................................... 10-1
10.1.2
Analog Converter ............................................................................ 10-3
10.1.3
Digital Control .................................................................................. 10-3
10.1.4
Result Registers .............................................................................. 10-3
10.1.5
A/D Converter Clocks ...................................................................... 10-4
10.1.6
Conversion Sequence ..................................................................... 10-4
10.2
A/D Converter Power-Up and Clock Select ............................................. 10-5
10.3
Conversion Process ................................................................................ 10-5
10.4
Channel Assignments ............................................................................. 10-6
10.5
Single-Channel Operation ....................................................................... 10-6
10.6
Multiple-Channel Operation ..................................................................... 10-6

MOTOROLA
MC68HC11F1
viii
TECHNICAL DATA
(Continued)
Paragraph
Title
Page
TABLE OF CONTENTS
10.7
Operation in STOP and WAIT Modes .................................................... 10-7
10.8
A/D Control/Status Registers .................................................................. 10-7
10.9
A/D Converter Result Registers .............................................................. 10-8
APPENDIX A ELECTRICAL CHARACTERISTICS
APPENDIX BMECHANICAL DATA AND ORDERING INFORMATION
B.1
Pin Assignments ....................................................................................... B-1
B.2
Package Dimensions ................................................................................ B-2
B.3
Ordering Information ................................................................................ B-3
APPENDIX CDEVELOPMENT SUPPORT
C.1
MC68HC11F1 Development Tools .......................................................... C-1
C.2
MC68HC11EVS -- Evaluation System .................................................... C-1
C.3
M68MMDS11 -- Modular Development System for M68HC11 Devices . C-1

MC68HC11F1
MOTOROLA
TECHNICAL DATA
ix
Figure
Title
Page
1-1
MC68HC11F1 Block Diagram ........................................................................ 1-2
2-1
Pin Assignments for MC68HC11F1 68-Pin PLCC ......................................... 2-1
2-2
Pin Assignments for MC68HC11F1 80-Pin QFP ............................................ 2-2
2-3
External Reset Circuit ..................................................................................... 2-3
2-4
Common Crystal Connections ........................................................................ 2-4
2-5
External Oscillator Connections ..................................................................... 2-4
2-6
One Crystal Driving Two MCUs ..................................................................... 2-4
2-7
4XOUT Signal Driving a Second MCU ........................................................... 2-5
3-1
Programming Model ....................................................................................... 3-2
3-2
Stacking Operations ....................................................................................... 3-4
4-1
MC68HC11F1 Memory Map .......................................................................... 4-3
4-2
RAM Standby MODB/V
STBY
Connections ..................................................... 4-4
4-3
Address Map for I/O and Program Chip Selects .......................................... 4-19
4-4
Address Map for General-Purpose Chip Select ........................................... 4-20
5-1
Processing Flow Out of Reset (1 of 2) ......................................................... 5-12
5-2
Processing Flow Out of Reset (2 of 2) ......................................................... 5-13
5-3
Interrupt Priority Resolution (1 of 2) ............................................................. 5-14
5-4
Interrupt Priority Resolution (2 of 2) ............................................................. 5-15
5-5
Interrupt Source Resolution Within SCI ........................................................ 5-16
7-1
SCI Transmitter Block Diagram ...................................................................... 7-2
7-2
SCI Receiver Block Diagram .......................................................................... 7-3
7-3
SCI Baud Rate Generator Block Diagram .................................................... 7-10
7-4
Interrupt Source Resolution Within SCI ........................................................ 7-12
8-1
SPI Block Diagram ......................................................................................... 8-2
8-2
SPI Transfer Format ....................................................................................... 8-3
9-1
Timer Clock Divider Chains ............................................................................ 9-2
9-2
Capture/Compare Block Diagram .................................................................. 9-4
9-3
Pulse Accumulator ....................................................................................... 9-16
10-1
A/D Converter Block Diagram ...................................................................... 10-2
10-2
Electrical Model of an A/D Input Pin (Sample Mode) ................................... 10-3
10-3
A/D Conversion Sequence ........................................................................... 10-4
A-1
Test Methods .................................................................................................. A-4
A-2
Timer Inputs ................................................................................................... A-5
A-3
POR External Reset Timing Diagram ............................................................. A-6
A-4
STOP Recovery Timing Diagram ................................................................... A-7
A-5
WAIT Recovery from Interrupt Timing Diagram ............................................. A-8
A-6
Interrupt Timing Diagram ................................................................................ A-9
A-7
Port Read Timing Diagram ........................................................................... A-10
A-8
Port Write Timing Diagram ........................................................................... A-10
A-9
Expansion Bus Timing .................................................................................. A-13
A-10
SPI Master Timing (CPHA = 0) .................................................................... A-15
LIST OF ILLUSTRATIONS

MOTOROLA
MC68HC11F1
x
TECHNICAL DATA
(Continued)
Figure
Title
Page
LIST OF ILLUSTRATIONS
A-11
SPI Master Timing (CPHA = 1) .................................................................... A-15
A-12
SPI Slave Timing (CPHA = 0) ...................................................................... A-16
A-13
SPI Slave Timing (CPHA = 1) ...................................................................... A-16
B-1
MC68HC11F1 68-Pin PLCC .......................................................................... B-1
B-2
MC68HC11F1 80-Pin Quad Flat Pack ........................................................... B-2

MC68HC11F1
MOTOROLA
TECHNICAL DATA
xi
Table
Title
Page
2-1
Port Signal Functions ...................................................................................... 2-7
3-1
Reset Vector Comparison ............................................................................... 3-5
3-2
Instruction Set ................................................................................................. 3-9
4-1
Register and Control Bit Assignments............................................................. 4-5
4-2
Write Access Limited Registers....................................................................... 4-7
4-3
Hardware Mode Select Summary ................................................................... 4-7
4-4
EEPROM Mapping ........................................................................................ 4-10
4-5
RAM and Register Mapping .......................................................................... 4-11
4-6
EEPROM Block Protection............................................................................ 4-14
4-7
EEPROM Erase Mode Control...................................................................... 4-17
4-8
Chip Select Clock Stretch Control ................................................................. 4-20
4-9
Program Chip Select Size Control................................................................. 4-21
4-10
General-Purpose Chip Select Starting Address ............................................ 4-22
4-11
General-Purpose Chip Select Size Control ................................................... 4-22
4-12
Chip Select Control Parameter Summary ..................................................... 4-23
5-1
COP Timer Rate Selection .............................................................................. 5-2
5-2
Reset Cause, Operating Mode, and Reset Vector .......................................... 5-4
5-3
Highest Priority Interrupt Selection.................................................................. 5-8
5-4
Interrupt and Reset Vector Assignments......................................................... 5-9
5-5
Stacking Order on Entry to Interrupts............................................................ 5-10
6-1
I/O Port Configuration...................................................................................... 6-1
7-1
Baud Rate Prescaler Selection ....................................................................... 7-8
7-2
Baud Rate Selection........................................................................................ 7-9
8-1
SPI Clock Rates .............................................................................................. 8-6
9-1
Timer Summary............................................................................................... 9-3
9-2
Timer Output Compare Configuration ........................................................... 9-10
9-3
Timer Prescaler Selection ............................................................................. 9-12
9-4
RTI Rate Selection ........................................................................................ 9-13
9-5
Pulse Accumulator Timing............................................................................. 9-16
9-6
Pulse Accumulator Edge Detection Control .................................................. 9-17
10-1
A/D Converter Channel Assignments............................................................ 10-6
10-2
A/D Converter Channel Selection ................................................................. 10-8
A-1
Maximum Ratings............................................................................................ A-1
A-2
Thermal Characteristics .................................................................................. A-2
A-3
DC Electrical Characteristics........................................................................... A-3
A-4
Control Timing ................................................................................................. A-5
A-5
Peripheral Port Timing................................................................................... A-10
A-6
Analog-To-Digital Converter Characteristics ................................................. A-11
A-7
Expansion Bus Timing................................................................................... A-12
A-8
Serial Peripheral Interface Timing ................................................................. A-14
A-9
EEPROM Characteristics .............................................................................. A-17
LIST OF TABLES

MOTOROLA
MC68HC11F1
xii
TECHNICAL DATA
(Continued)
Table
Title
Page
LIST OF TABLES
B-1
Device Ordering Information ........................................................................... B-3
C-1
MC68HC11F1 Development Tools .................................................................C-1

MC68HC11F1
INTRODUCTION
MOTOROLA
TECHNICAL DATA
1-1
SECTION 1INTRODUCTION
The MC68HC11F1 high-performance microcontroller unit (MCU) is an enhanced de-
rivative of the M68HC11 family of microcontrollers and includes many advanced fea-
tures. This MCU, with a nonmultiplexed expanded bus, is characterized by high speed
and low power consumption. The fully static design allows operation at frequencies
from 4 MHz to dc.
1.1 Features
∑ M68HC11 Central Processing Unit (CPU)
∑ Power Saving STOP and WAIT Modes
∑ 512 Bytes Electrically Erasable Programmable Read-Only Memory (EEPROM)
∑ 1024 Bytes RAM, Data Retained During Standby
∑ Nonmultiplexed Address and Data Buses
∑ Enhanced 16-Bit Timer
∑ Three Input Capture (IC) Channels
∑ Four Output Compare (OC) Channels
∑ One Additional Channel, Selectable as Fourth IC or Fifth OC
∑ 8-Bit Pulse Accumulator
∑ Real-Time Interrupt Circuit
∑ Computer Operating Properly (COP) Watchdog
∑ Enhanced Asynchronous Nonreturn to Zero (NRZ) Serial Communications Inter-
face (SCI)
∑ Enhanced Synchronous Serial Peripheral Interface (SPI)
∑ Eight-Channel 8-Bit Analog-to-Digital (A/D) Converter
∑ Four Chip-Select Signal Outputs with Programmable Clock Stretching
-- Two I/O Chip Selects
-- One Program Chip Select
-- One General-Purpose Chip Select
∑ Available in 68-Pin Plastic Leaded Chip Carrier (PLCC) and 80-Pin Plastic Quad
Flat Pack (QFP)

MOTOROLA
INTRODUCTION
MC68HC11F1
1-2
TECHNICAL DATA
Figure 1-1 MC68HC11F1 Block Diagram
COP
PERIODIC
SPI
SCI
CHIP
SELECTS
AN0
PORT E
AN1
AN2
AN3
AN4
AN5
AN6
AN7
A/D
CONVERTER
MODE
CONTROL
TIMER
SYSTEM
CPU
V
RL
V
RH
PE0
PE1
PE2
PE3
PE4
PE5
PE6
PE7
PORT G DDR
PORT G
PG0
PG1
PG2
PG3
PG4
PG5
PG6
PG7
PD0
PD1
PD2
PD3
PD4
PD5
CSIO2
CSIO1
CSGEN
CSPROG
PORT D DDR
PORT D
MISO
MOSI
SCK
SS
RxD
TxD
MODB/
MODA/
512
BYTES
EEPROM
1024
BYTES
RAM
INTERRUPT
PULSE
ACCUMULATOR
PA0
PORT A DDR
PA1
PA2
PA3
PA4
PA5
PA6
PA7
IC3
IC2
IC1
OC5/IC4/OC1
OC4/OC1
OC3/OC1
OC2/OC1
PAI/OC1
OSCILLATOR
INTERRUPT
LOGIC
CLOCK
LOGIC
PC0
PORT C DDR
PC1
PC2
PC3
PC4
PC5
PC6
PC7
DATA0
DATA1
DATA2
DATA3
DATA4
DATA5
DATA6
DATA7
PORT C
PF0
PORT F
PF1
PF2
PF3
PF4
PF5
PF6
PF7
ADDR0
ADDR1
ADDR2
ADDR3
ADDR4
ADDR5
ADDR6
ADDR7
PB0
PORT B
PB1
PB2
PB3
PB4
PB5
PB6
PB7
ADDR8
ADDR9
ADDR10
ADDR11
ADDR12
ADDR13
ADDR14
ADDR15
PORT A
R/W
XIRQ
IRQ
RESET
XTAL
EXTAL
E
4XOUT
LIR
V
STBY
ADDRESS BUS
DATA BUS
V
DD
V
SS
V
RH
V
RL
R/W

MC68HC11F1
PIN DESCRIPTIONS
MOTOROLA
TECHNICAL DATA
2-1
SECTION 2 PIN DESCRIPTIONS
The MC68HC11F1 MCU is available in a 68-pin plastic leaded chip carrier (PLCC) and
an 80-pin plastic quad flat pack (QFP). Most pins on this MCU serve two or more func-
tions, as described in the following paragraphs.
Figure 2-1
shows the pin assignments
for the PLCC.
Figure 2-2
shows the pin assignments for the QFP.
Figure 2-1 Pin Assignments for MC68HC11F1 68-Pin PLCC
PG3
PG2
PG1
RESET
PC7/DATA7
PC6/DATA6
PC5/DATA5
PC4/DATA4
PC3/DATA3
PC2/DATA2
PC1/DATA1
IRQ
XIRQ
PG7/CSPROG
PG6/CSGEN
PG5/CSIO1
PG4/CSIO2
PB3/ADDR11
PB0/ADDR8
PB1/ADDR9
PB2/ADDR10
PB4/ADDR12
PB5/ADDR13
PB6/ADDR14
PE4/AN4
PE0/AN0
PF0/ADDR0
PF1/ADDR1
PF2/ADDR2
PF3/ADDR3
PF4/ADDR4
PF5/ADDR5
PF6/ADDR6
PF7/ADDR7
E
MODB/V
STBY
MODA/LIR
PC0/DATA0
EXTAL
XTAL
V
SS
R/W
4XOUT
PE7/AN7
PE3/AN3
PE6/AN6
PE2/AN2
PE5/AN5
PE1/AN1
V
RH
V
RL
PG0
PD3/MOSI
PD0/RxD
PD4/SCK
PD2/MISO
PD1/TxD
PD5/SS
PB7/ADDR15
PA4/OC4/OC1
PA5/OC3/OC1
PA6/OC2/OC1
PA7/PAI/OC1
V
DD
PA3/OC5/IC4/OC1
PA2/IC1
PA1/IC2
PA0/IC3
23
24
10
11
12
13
14
15
16
17
18
45
59
58
57
56
55
54
53
52
51
50
19
20
21
22
49
48
47
46
25
60
6
5
4
3
2
67
68
65
64
63
62
8
7
66
9
34
35
36
37
38
39
27
28
29
30
31
32
33
40
41
42
61
44
26
43
1
MC68HC11F1

MOTOROLA
PIN DESCRIPTIONS
MC68HC11F1
2-2
TECHNICAL DATA
Figure 2-2 Pin Assignments for MC68HC11F1 80-Pin QFP
2.1 V
DD and
V
SS
Power is supplied to the MCU through V
DD
and V
SS
. V
DD
is the power supply, and
V
SS
is ground. The MCU operates from a single 5-volt (nominal) power supply. Very
fast signal transitions occur on the MCU pins. The short rise and fall times place high,
short duration current demands on the power supply. To prevent noise problems, pro-
vide good power-supply bypassing at the MCU. Also, use bypass capacitors that have
good high-frequency characteristics and situate them as close to the MCU as possible.
Bypass requirements vary, depending on how heavily the MCU pins are loaded.
PA3/OC5/IC4/OC1
PA5/OC3/OC1
PA4/OC4/OC1
NC
PA1/IC2
PA0/IC3
V
DD
PA2/IC1
PB7/ADDR15
PD5/SS
PD4/SCK
PD3/MOSI
PD2/MISO
PD1/TxD
14
15
1
2
3
4
5
6
7
8
9
45
59
58
57
56
55
54
53
52
51
50
10
11
12
13
49
48
47
46
16
60
PF2/ADDR2
PF1/ADDR1
PB1/ADDR9
PB2/ADDR10
PB3/ADDR11
PB4/ADDR12
PB5/ADDR13
PB6/ADDR14
NC
NC
PF7/ADDR7
PB0/ADDR8
PF6/ADDR6
PF3/ADDR3
PC5/DATA5
PC7/DATA7
PC6/DATA6
PC4/DATA4
PC3/DATA3
NC
PG1
PG2
PG3
PG4/CSIO2
PG5/CSIO1
PG6/CSGEN
PG7/CSPROG
77
76
75
74
73
70
71
68
67
66
65
79
78
69
28
29
30
31
32
33
21
22
23
24
25
26
27
34
35
36
NC
PE2/AN2
NC
PE6/AN6
PE5/AN5
PE1/AN1
V
SS
V
RH
MODA/LIR
E
R/W
EXTAL
64
44
PC2/DATA2
PF0/ADDR0
17
XTAL
37
NC
72
63
62
61
PD0/RxD
PG0
NC
PC0/DATA0
NC
4XOUT
38
39
40
PE0/AN0
PE4/AN4
NC
18
19
20
PC1/DATA1
NC
43
42
41
80
MC68HC11F1
PA6/OC2/OC1
PA7/PAI/OC1
V
RL
MODB/V
STBY
PE7/AN7
PE3/AN3
PF5/ADDR5
PF4/ADDR4
IRQ
XIRQ
RESET
NC

MC68HC11F1
PIN DESCRIPTIONS
MOTOROLA
TECHNICAL DATA
2-3
2.2 Reset (RESET
)
An active low bidirectional control signal, RESET, acts as an input to initialize the MCU
to a known start-up state. It also acts as an open-drain output to indicate that an inter-
nal failure has been detected in either the clock monitor or COP watchdog circuit. The
CPU distinguishes between internal and external reset conditions by sensing whether
the reset pin rises to a logic one in less than two E-clock cycles after a reset has oc-
curred. It is not advisable to connect an external resistor-capacitor (RC) power-up de-
lay circuit to the reset pin of M68HC11 devices because the circuit charge time
constant can cause the device to misinterpret the type of reset that occurred. Refer to
SECTION 5 RESETS AND INTERRUPTS
for further information.
Figure 2-3
illustrates a reset circuit that uses an external switch. Other circuits can be
used, however, it is important to incorporate a low voltage interrupt (LVI) circuit to pre-
vent operation at insufficient voltage levels which could result in erratic behavior or cor-
ruption of RAM.
Figure 2-3 External Reset Circuit
2.3 E-Clock Output (E)
E is the output connection for the internally generated E clock. The signal from E is
used as a timing reference. The frequency of the E-clock output is one fourth that of
the input frequency at the EXTAL pin. When E-clock output is low, an internal process
is taking place. When it is high, data is being accessed. All clocks, including the E
clock, are halted when the MCU is in STOP mode. The E clock can be turned off in
single-chip modes to reduce the effects of radio frequency interference (RFI). Refer to
SECTION 9 TIMING SYSTEM
.
2.4 Crystal Driver and External Clock Input (XTAL, EXTAL)
These two pins provide the interface for either a crystal or a CMOS-compatible clock
to control the internal clock generator circuitry. Either a crystal oscillator or a CMOS
compatible clock can be used. The resulting E-clock rate is the input frequency divided
by four.
MANUAL
RESET SWITCH
4.7 k
TO RESET
OF M68HC11
4.7 k
V
DD
V
DD
MC34064
IN
GND
2
3
1
RESET
1.0
µ
F
4.7 k
V
DD
MC34164
IN
GND
2
3
1
RESET
OPTIONAL POWER-ON DELAY
AND MANUAL RESET SWITCH

MOTOROLA
PIN DESCRIPTIONS
MC68HC11F1
2-4
TECHNICAL DATA
The XTAL pin is normally left unterminated when an external CMOS compatible clock
is connected to the EXTAL pin. However, a 10 k
to 100 k
load resistor connected
from the XTAL output to ground can be used to reduce RFI noise emission.
The XTAL output is normally used to drive a crystal. The XTAL output can be buffered
with a high-impedance buffer, or it can be used to drive the EXTAL input of another
M68HC11 device. Refer to
Figure 2-6
.
In all cases, use caution when designing circuitry associated with the oscillator pins.
Load capacitances shown in the oscillator circuits include all stray layout capacitanc-
es. Refer to Figure 2-4, Figure 2-5, and Figure 2-6.
Figure 2-4 Common Crystal Connections
Figure 2-5 External Oscillator Connections
Figure 2-6 One Crystal Driving Two MCUs
EXTAL
XTAL
25 pF
*
Values include all stray capacitances.
*
25 pF
*
10M
4 x E
CRYSTAL
MCU
NC OR
10 k ≠ 100 k
LOAD
XTAL
EXTAL
MCU
CMOS-COMPATIBLE
EXTERNAL
OSCILLATOR
EXTAL
XTAL
25 pF
*
Values include all stray capacitances.
*
25 pF
*
10M
4 x E
CRYSTAL
NC OR
10 k ≠ 100 k
LOAD
XTAL
EXTAL
SECOND
220
MCU
FIRST
MCU

MC68HC11F1
PIN DESCRIPTIONS
MOTOROLA
TECHNICAL DATA
2-5
2.5 Four Times E-Clock Frequency Output (4XOUT)
Although the circuit shown in Figure 2-6 will work for any M68HC11 MCU, the
MC68HC11F1 has an additional clock output that is four times the E-clock frequency.
This output (4XOUT) can be used to directly drive the EXTAL input of another
M68HC11 MCU. Refer to Figure 2-7. The 4XOUT output is enabled after reset and
can be disabled by clearing the CLK4X bit in the OPT2 register.
Figure 2-7 4XOUT Signal Driving a Second MCU
2.6 Interrupt Request (IRQ)
The IRQ input provides a means of generating asynchronous interrupt requests for the
CPU. Either falling-edge triggering or low-level triggering is selected by the IRQE bit
in the OPTION register. IRQ is always configured for level-sensitive triggering at reset.
Connect an external pull-up resistor, typically 4.7 k
, to V
DD
when IRQ is used in a
level-sensitive wired-OR configuration. Refer to SECTION 5 RESETS AND INTER-
RUPTS.
2.7 Non-Maskable Interrupt (XIRQ)
The XIRQ input provides a means of requesting a non-maskable interrupt after reset
initialization. During reset, the X bit in the condition code register (CCR) is set and any
interrupt is masked until MCU software enables it. Because the XIRQ input is level
sensitive, it can be connected to a multiple-source wired-OR network with an external
pull-up resistor to V
DD
. XIRQ is often used as a power loss detect interrupt.
Whenever XIRQ or IRQ are used with multiple interrupt sources (IRQ must be config-
ured for level-sensitive operation if there is more than one source of IRQ interrupt),
each source must drive the interrupt input with an open-drain type of driver to avoid
contention between outputs. There should be a single pull-up resistor near the MCU
interrupt input pin (typically 4.7 k
). There must also be an interlock mechanism at
each interrupt source so that the source holds the interrupt line low until the MCU rec-
ognizes and acknowledges the interrupt request. If one or more interrupt sources are
still pending after the MCU services a request, the interrupt line will still be held low
and the MCU will be interrupted again as soon as the interrupt mask bit in the condition
code register (CCR) is cleared (normally upon return from an interrupt). Refer to SEC-
TION 5 RESETS AND INTERRUPTS.
EXTAL
4XOUT
MC68HC11F1
NC OR
10 k ≠ 100 k
LOAD
XTAL
EXTAL
SECOND
XTAL
MCU
OSCILLATOR
CIRCUIT OR
CMOS-COMPATIBLE
CLOCK

MOTOROLA
PIN DESCRIPTIONS
MC68HC11F1
2-6
TECHNICAL DATA
2.8 MODA and MODB (MODA/LIR and MODB/V
STBY
)
During reset, MODA and MODB select one of the four operating modes. Refer to SEC-
TION 4 OPERATING MODES AND ON-CHIP MEMORY.
After the operating mode has been selected, the LIR pin provides an open-drain output
to indicate that execution of an instruction has begun. The LIR pin is configured for
wired-OR operation (only pulls low). A series of E-clock cycles occurs during execution
of each instruction. The LIR signal is asserted (drives low) during the first E-clock cycle
of each instruction (opcode fetch). This output is provided for assistance in program
debugging.
The V
STBY
pin is used to input RAM standby power. The MCU is powered from the
V
DD
signal unless the difference between the level of V
STBY
and V
dd
is greater than
one MOS threshold (about 0.7 volts). When these voltages differ by more than 0.7
volts, the internal 768-byte RAM and part of the reset logic are powered from V
STBY
rather than V
DD
. This allows RAM contents to be retained without V
DD
power applied
to the MCU.
Reset must be driven low before V
DD
is removed and must remain low
until V
DD
has been restored to a valid level.
2.9 V
RH
and V
RL
These pins provide the reference voltage for the analog-to-digital converter. Bypass
capacitors should be used to minimize noise on these signals. Any noise on V
RH
and
V
RL
will directly affect A/D accuracy.
2.10 R/W
In expanded and test modes, R/W indicates the direction of transfers on the external
data bus. A logic level one on this pin indicates that a read cycle is in progress. A logic
zero on this pin indicates that a write cycle is in progress and that no external device
should drive the data bus.
The E-clock can be used to enable external devices to drive data onto the data bus
during the second half of a read bus cycle (E clock high). R/W can then be used to
control the direction of data transfers. R/W drives low when data is being written to the
external data bus. R/W will remain low during consecutive data bus write cycles, such
as when a double-byte store occurs.
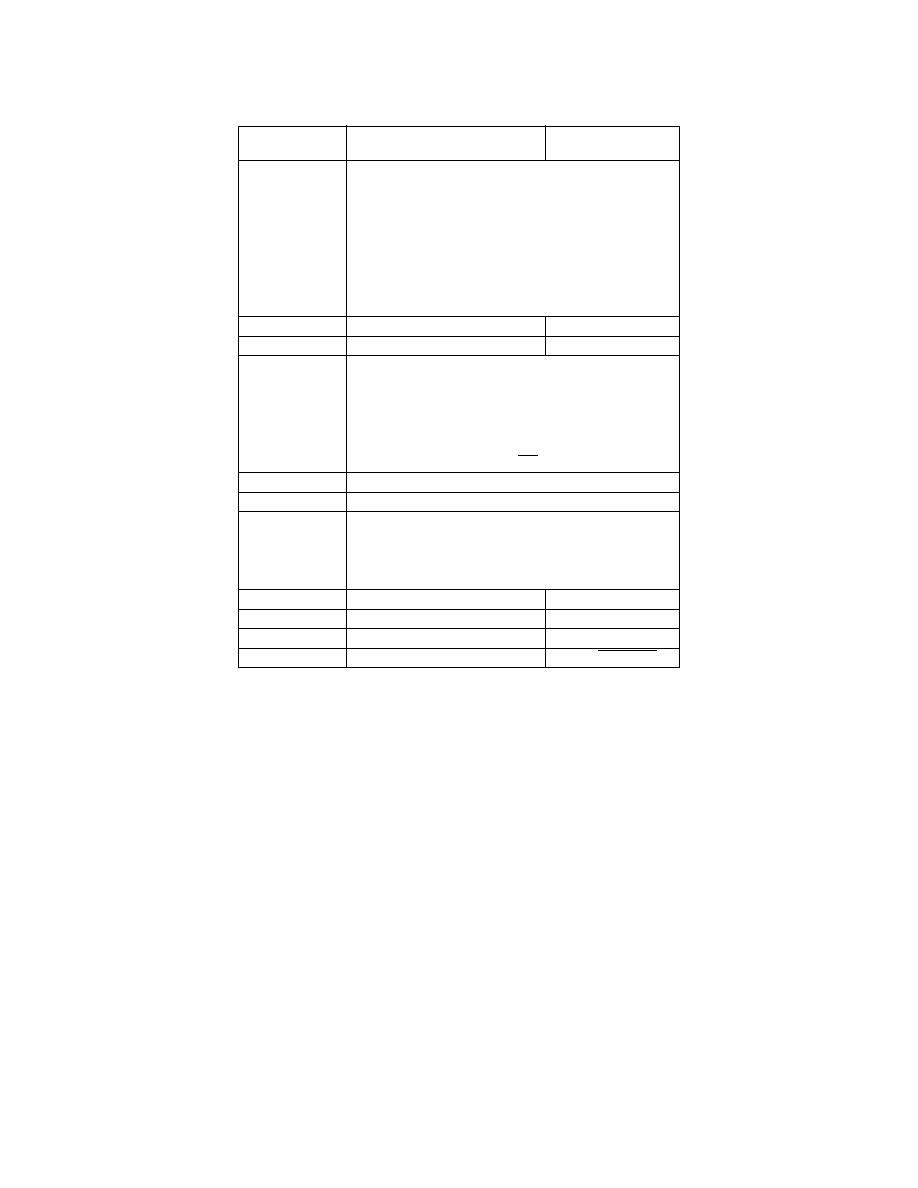
2.11 Port Signals
For the MC68HC11F1, 54 pins are arranged into six 8-bit ports: A, B, C, E, F, and G,
and one 6-bit port (D). Each of these seven ports serves a purpose other than I/O, de-
pending on the operating mode or peripheral functions selected. Note that ports B, C,
and F are available for I/O functions only in single-chip and bootstrap modes. The pins
of ports A, C, D, and G are fully bidirectional. Ports B and F are output-only ports. Port
E is an input-only port. Refer to Table 2-1 for details about the 54 port signals' func-
tions within different operating modes.
MC68HC11F1
PIN DESCRIPTIONS
MOTOROLA
TECHNICAL DATA
2-7
2.11.1 Port A
Port A is an 8-bit general-purpose I/O port with a data register (PORTA) and a data
direction register (DDRA). Port A pins share functions with the 16-bit timer system.
PORTA can be read at any time. Inputs return the pin level; outputs return the pin driv-
er input level. If written, PORTA stores the data in internal latches. It drives the pins
only if they are configured as outputs. Writes to PORTA do not change the pin state
when the pins are configured for timer output compares.
Out of reset, port A pins [7:0] are general-purpose high-impedance inputs. When the
timer functions associated with these pins are disabled, the bits in DDRA govern the
I/O state of the associated pin. For further information, refer to SECTION 6 PARAL-
LEL INPUT/OUTPUT.
NOTE
When using the information about port functions, do not confuse pin
function with the electrical state of the pin at reset. All general-pur-
pose I/O pins configured as inputs at reset are in a high-impedance
state. Port data registers reflect the logic state of the port at reset.
The pin function is mode dependent.
Table 2-1 Port Signal Functions
Port/Bit
Single-Chip and
Bootstrap Mode
Expanded and
Special Test Mode
PA0
PA0/IC3
PA1
PA1/IC2
PA2
PA2/IC1
PA3
PA3/OC5/IC4/OC1
PA4
PA4/OC4/OC1
PA5
PA5/OC3/OC1
PA6
PA6/OC2/OC1
PA7
PA7/PAI/OC1
PB[7:0]
PB[7:0]
ADDR[15:8]
PC[7:0]
PC[7:0]
DATA[7:0]
PD0
PD0/RxD
PD1
PD1/TxD
PD2
PD2/MISO
PD3
PD3/MOSI
PD4
PD4/SCK
PD5
PD5/SS
PE[7:0]
PE[7:0]/AN[7:0]
PF[7:0]
PF[7:0]
ADDR[7:0]
PG0
PG0
PG1
PG1
PG2
PG2
PG3
PG3
PG4
PG4
PG4/CSIO2
PG5
PG5
PG5/CSIO1
PG6
PG6
PG6/CSGEN
PG7
PG7
PG7/CSPROG

MOTOROLA
PIN DESCRIPTIONS
MC68HC11F1
2-8
TECHNICAL DATA
2.11.2 Port B
Port B is an 8-bit output-only port. In single-chip modes, port B pins are general-pur-
pose output pins (PB[7:0]). In expanded modes, port B pins act as the high-order ad-
dress lines (ADDR[15:8]) of the address bus.
PORTB can be read at any time. Reads of PORTB return the pin driver input level. If
PORTB is written, the data is stored in internal latches. It drives the pins only in single-
chip or bootstrap mode. In expanded operating modes, port B pins are the high-order
address outputs (ADDR[15:8]).
Refer to SECTION 6 PARALLEL INPUT/OUTPUT.
2.11.3 Port C
Port C is an 8-bit general-purpose I/O port with a data register (PORTC) and a data
direction register (DDRC). In single-chip modes, port C pins are general-purpose I/O
pins (PC[7:0]). In expanded modes, port C pins are configured as data bus pins (DA-
TA[7:0]).
PORTC can be read at any time. Inputs return the pin level; outputs return the pin driv-
er input level. If PORTC is written, the data is stored in internal latches. It drives the
pins only if they are configured as outputs in single-chip or bootstrap mode. Port C pins
are general-purpose inputs out of reset in single-chip and bootstrap modes. In expand-
ed and test modes, these pins are data bus lines out of reset.
The CWOM control bit in the OPT2 register disables port C's P-channel output drivers.
Because the N-channel driver is not affected by CWOM, setting CWOM causes port
C to become an open-drain-type output port suitable for wired-OR operation. In wired-
OR mode, (PORTC bits are at logic level zero), pins are actively driven low by the N-
channel driver. When a port C bit is at logic level one, the associated pin is in a high-
impedance state, as neither the N-channel nor the P-channel devices are active. It is
customary to have an external pull-up resistor on lines that are driven by open-drain
devices. Port C can only be configured for wired-OR operation when the MCU is in sin-
gle-chip or bootstrap modes.
Refer to SECTION 6 PARALLEL INPUT/OUTPUT.
2.11.4 Port D
Port D, a 6-bit general-purpose I/O port, has a data register (PORTD) and a data di-
rection register (DDRD). The six port D lines (D[5:0]) can be used for general-purpose
I/O, for the serial communications interface (SCI) and serial peripheral interface (SPI)
subsystems.
PORTD can be read at any time. Inputs return the pin level; outputs return the pin driv-
er input level. If PORTD is written, the data is stored in internal latches and can be driv-
en only if port D is configured for general-purpose output.
The DWOM control bit in the SPCR register disables port D's P-channel output drivers.
Because the N-channel driver is not affected by DWOM, setting DWOM causes port
D to become an open-drain-type output port suitable for wired-OR operation. In wired-

MC68HC11F1
PIN DESCRIPTIONS
MOTOROLA
TECHNICAL DATA
2-9
OR mode, (PORTD bits are at logic level zero), pins are actively driven low by the N-
channel driver. When a port D bit is at logic level one, the associated pin is in a high-
impedance state, as neither the N-channel nor the P-channel devices are active. It is
customary to have an external pull-up resistor on lines that are driven by open-drain
devices. Port D can be configured for wired-OR operation in any operating mode.
Refer to SECTION 6 PARALLEL INPUT/OUTPUT, SECTION 7 SERIAL COMMUNI-
CATIONS INTERFACE, and SECTION 8 SERIAL PERIPHERAL INTERFACE.
2.11.5 Port E
Port E is an 8-bit input-only port that is also used as the analog input port for the ana-
log-to-digital converter. Port E pins that are not used for the A/D system can be used
as general-purpose inputs. However, PORTE should not be read during the sample
portion of an A/D conversion sequence.
Refer to SECTION 10 ANALOG-TO-DIGITAL CONVERTER.
2.11.6 Port F
Port F is an 8-bit output-only port. In single-chip mode, port F pins are general-purpose
output pins (PF[7:0]). In expanded mode, port F pins act as the low-order address out-
puts (ADDR[7:0]).
PORTF can be read at any time. Reads of PORTF return the pin driver input level. If
PORTF is written, the data is stored in internal latches. It drives the pins only in single-
chip or bootstrap mode. In expanded operating modes, port F pins are the low-order
address outputs (ADDR[7:0]).
Refer to SECTION 6 PARALLEL INPUT/OUTPUT.
2.11.7 Port G
Port G is an 8-bit general-purpose I/O port. When enabled, four chip select signals are
alternate functions of port G bits [7:4].
PORTG can be read at any time. Inputs return the pin level; outputs return the pin driv-
er input level. If PORTG is written, the data is stored in internal latches. It drives the
pins only if they are configured as outputs.
The GWOM control bit in the OPT2 register disables port G's P-channel output drivers.
Because the N-channel driver is not affected by GWOM, setting GWOM causes port
G to become an open-drain-type output port suitable for wired-OR operation. In wired-
OR mode, (PORTG bits are at logic level zero), pins are actively driven low by the N-
channel driver. When a port G bit is at logic level one, the associated pin is in a high-
impedance state, as neither the N-channel nor the P-channel devices are active. It is
customary to have an external pull-up resistor on lines that are driven by open-drain
devices. Port G can be configured for wired-OR operation in any operating mode.
Refer to SECTION 6 PARALLEL INPUT/OUTPUT and SECTION 4 OPERATING
MODES AND ON-CHIP MEMORY.

MOTOROLA
PIN DESCRIPTIONS
MC68HC11F1
2-10
TECHNICAL DATA

MC68HC11F1
CENTRAL PROCESSING UNIT
MOTOROLA
TECHNICAL DATA
3-1
SECTION 3 CENTRAL PROCESSING UNIT
This section presents information on M68HC11 central processing unit (CPU) archi-
tecture. Data types, addressing modes, the instruction set, and the extended address-
ing range required to support this MCU's memory expansion feature are also included,
as are special operations such as subroutine calls and interrupts.
The CPU is designed to treat all peripheral, I/O, and memory locations identically as
addresses in the 64 Kbyte memory map. This is referred to as memory-mapped I/O.
There are no special instructions for I/O that are separate from those used for memory.
This architecture also allows accessing an operand from an external memory location
with no execution-time penalty.
3.1 CPU Registers
M68HC11 CPU registers are an integral part of the CPU and are not addressed as if
they were memory locations. The seven registers, discussed in the following para-
graphs, are shown in Figure 3-1.

MOTOROLA
CENTRAL PROCESSING UNIT
MC68HC11F1
3-2
TECHNICAL DATA
Figure 3-1 Programming Model
3.1.1 Accumulators A, B, and D
Accumulators A and B are general-purpose 8-bit registers that hold operands and re-
sults of arithmetic calculations or data manipulations. For some instructions, these two
accumulators are treated as a single double-byte (16-bit) accumulator called accumu-
lator D. Although most instructions can use accumulators A or B interchangeably, the
following exceptions apply:
The ABX and ABY instructions add the contents of 8-bit accumulator B to the contents
of 16-bit register X or Y, but there are no equivalent instructions that use A instead of B.
The TAP and TPA instructions transfer data from accumulator A to the condition code
register, or from the condition code register to accumulator A, however, there are no
equivalent instructions that use B rather than A.
The decimal adjust accumulator A (DAA) instruction is used after binary-coded deci-
mal (BCD) arithmetic operations, but there is no equivalent BCD instruction to adjust
accumulator B.
CARRY
OVERFLOW
ZERO
NEGATIVE
I INTERRUPT MASK
HALF-CARRY (FROM BIT 3)
X INTERRUPT MASK
STOP DISABLE
CCR
PC
SP
IY
IX
D
S
PROGRAM COUNTER
STACK POINTER
INDEX REGISTER Y
INDEX REGISTER X
DOUBLE ACCUMULATOR D
ACCUMULATOR B
CONDITION CODE REGISTER
X
H
I
N
Z
V
C
7
0
7
0
0
15
0
15
0
15
0
15
0
15
7
0
ACCUMULATOR A
1
2
3
4
5
6
B
A

MC68HC11F1
CENTRAL PROCESSING UNIT
MOTOROLA
TECHNICAL DATA
3-3
The add, subtract, and compare instructions associated with both A and B (ABA, SBA,
and CBA) only operate in one direction, making it important to plan ahead to ensure
that the correct operand is in the correct accumulator.
3.1.2 Index Register X (IX)
The IX register provides a 16-bit indexing value that can be added to the 8-bit offset
provided in an instruction to create an effective address. The IX register can also be
used as a counter or as a temporary storage register.
3.1.3 Index Register Y (IY)
The 16-bit IY register performs an indexed mode function similar to that of the IX reg-
ister. However, most instructions using the IY register require an extra byte of machine
code and an extra cycle of execution time because of the way the opcode map is im-
plemented. Refer to 3.3 Opcodes and Operands for further information.
3.1.4 Stack Pointer (SP)
The M68HC11 CPU has an automatic program stack. This stack can be located any-
where in the address space and can be any size up to the amount of memory available
in the system. Normally the SP is initialized by one of the first instructions in an appli-
cation program. The stack is configured as a data structure that grows downward from
high memory to low memory. Each time a new byte is pushed onto the stack, the SP
is decremented. Each time a byte is pulled from the stack, the SP is incremented. At
any given time, the SP holds the 16-bit address of the next free location in the stack.
Figure 3-2 is a summary of SP operations.

MOTOROLA
CENTRAL PROCESSING UNIT
MC68HC11F1
3-4
TECHNICAL DATA
Figure 3-2 Stacking Operations
When a subroutine is called by a jump to subroutine (JSR) or branch to subroutine
(BSR) instruction, the address of the instruction after the JSR or BSR is automatically
pushed onto the stack, least significant byte first. When the subroutine is finished, a
return from subroutine (RTS) instruction is executed. The RTS pulls the previously
stacked return address from the stack, and loads it into the program counter. Execu-
tion then continues at this recovered return address.
SP-9
STACK
SP-1
ACMLTR A
ACMLTR B
CONDITION CODE
SP-2
SP-3
SP-4
SP-5
SP-6
SP-7
SP-8
INDEX REGISTER (Y
L
)
INDEX REGISTER (Y
H
)
INDEX REGISTER (X
L
)
INDEX REGISTER (X
H
)
RTN
H
RTN
L
STACK
SP-2
SP-1
SP
RTN
H
RTN
L
STACK
SP-2
SP-1
SP
RTN
H
RTN
L
$9D = JSR
dd
NEXT MAIN INSTR
DIRECT
MAIN PROGRAM
$AD = JSR
ff
NEXT MAIN INSTR
INDXD,X
MAIN PROGRAM
PC
RTN
PC
RTN
$18 = PRE
ff
NEXT MAIN INSTR
INDXD,Y
MAIN PROGRAM
PC
RTN
$AD = JSR
$BD = JSR
ll
NEXT MAIN INSTR
EXTEND
MAIN PROGRAM
PC
RTN
hh
$8D = BSR
rr
NEXT MAIN INSTR
MAIN PROGRAM
$39 = RTS
SUBROUTINE
PC
RTN
PC
BSR, BRANCH TO SUBROUTINE
STACK
SP
SP+1
SP+2
RTS, RETURN FROM SUBROUTINE
$3F = SWI
MAIN PROGRAM
PC
SWI, SOFTWARE INTERRUPT
RTN
$3E = WAI
MAIN PROGRAM
PC
WAI, WAIT FOR INTERRUPT
RTN
$3B = RTI
INTERRUPT PROGRAM
PC
STACK
SP+1
SP
RTI, RETURN FROM INTERRUPT
ACMLTR A
ACMLTR B
CONDITION CODE
SP+2
SP+3
SP+4
SP+5
SP+6
SP+7
SP+8
SP+9
LEGEND:
RTN
RTN
H
RTN
L
dd
ff
hh
ll
rr
Address of next instruction in main program to be
executed upon return from subroutine.
Most significant byte of return address.
Least significant byte of return address.
8-bit direct address ($0000-$00FF) (high byte
assumed to be $00).
8-bit positive offset $00 (0) to $FF (256) is added
to index.
High-order byte of 16-bit extended address.
Low-order byte of 16-bit extended address.
Signed-relative offset $80 (-128) to $7F (+127)
(offset relative to the address following the
machine code offset byte).
JSR, JUMP TO SUBROUTINE
Shaded cells show stack pointer position after
operation is complete.
RTN
H
RTN
L
INDEX REGISTER (Y
L
)
INDEX REGISTER (Y
H
)
INDEX REGISTER (X
L
)
INDEX REGISTER (X
H
)
RTN
H
RTN
L
SP

MC68HC11F1
CENTRAL PROCESSING UNIT
MOTOROLA
TECHNICAL DATA
3-5
When an interrupt is recognized, the current instruction finishes normally, the return
address (the current value in the program counter) is pushed onto the stack, all of the
CPU registers are pushed onto the stack, and execution continues at the address
specified by the vector for the interrupt. At the end of the interrupt service routine, an
RTI instruction is executed. The RTI instruction causes the saved registers to be pulled
off the stack in reverse order. Program execution resumes at the return address.
There are instructions that push and pull the A and B accumulators and the X and Y
index registers. These instructions are often used to preserve program context. For
example, pushing accumulator A onto the stack when entering a subroutine that uses
accumulator A, and then pulling accumulator A off the stack just before leaving the
subroutine, ensures that the contents of a register will be the same after returning from
the subroutine as it was before starting the subroutine.
3.1.5 Program Counter (PC)
The program counter, a 16-bit register, contains the address of the next instruction to
be executed. After reset, the program counter is initialized from one of six possible
vectors, depending on operating mode and the cause of reset.
3.1.6 Condition Code Register (CCR)
This 8-bit register contains five condition code indicators (C, V, Z, N, and H), two inter-
rupt masking bits, (I and X) and a stop disable bit (S). In the M68HC11 CPU, condition
codes are automatically updated by most instructions. For example, load accumulator
A (LDAA) and store accumulator A (STAA) instructions automatically set or clear the
N, Z, and V condition code flags. Pushes, pulls, add B to X (ABX), add B to Y (ABY),
and transfer/exchange instructions do not affect the condition codes. Refer to Table
3-2, which shows what condition codes are affected by a particular instruction.
3.1.6.1 Carry/Borrow (C)
The C bit is set if the arithmetic logic unit (ALU) performs a carry or borrow during an
arithmetic operation. The C bit also acts as an error flag for multiply and divide opera-
tions. Shift and rotate instructions operate with and through the carry bit to facilitate
multiple-word shift operations.
3.1.6.2 Overflow (V)
The overflow bit is set if an operation causes an arithmetic overflow. Otherwise, the V
bit is cleared.
Table 3-1 Reset Vector Comparison
POR or RESET Pin
Clock Monitor
COP Watchdog
Normal
$FFFE, F
$FFFC, D
$FFFA, B
Test or Boot
$BFFE, F
$BFFC, D
$BFFA, B

MOTOROLA
CENTRAL PROCESSING UNIT
MC68HC11F1
3-6
TECHNICAL DATA
3.1.6.3 Zero (Z)
The Z bit is set if the result of an arithmetic, logic, or data manipulation operation is
zero. Otherwise, the Z bit is cleared. Compare instructions do an internal implied sub-
traction and the condition codes, including Z, reflect the results of that subtraction. A
few operations (INX, DEX, INY, and DEY) affect the Z bit and no other condition flags.
For these operations, only = and - conditions can be determined.
3.1.6.4 Negative (N)
The N bit is set if the result of an arithmetic, logic, or data manipulation operation is
negative (MSB = 1). Otherwise, the N bit is cleared. A result is said to be negative if
its most significant bit (MSB) is a one. A quick way to test whether the contents of a
memory location has the MSB set is to load it into an accumulator and then check the
status of the N bit.
3.1.6.5 Interrupt Mask (I)
The interrupt request (IRQ) mask (I bit) is a global mask that disables all maskable in-
terrupt sources. While the I bit is set, interrupts can become pending, but the operation
of the CPU continues uninterrupted until the I bit is cleared. After any reset, the I bit is
set by default and can only be cleared by a software instruction. When an interrupt is
recognized, the I bit is set after the registers are stacked, but before the interrupt vector
is fetched. After the interrupt has been serviced, a return from interrupt instruction is
normally executed, restoring the registers to the values that were present before the
interrupt occurred. Normally, the I bit is zero after a return from interrupt is executed.
Although the I bit can be cleared within an interrupt service routine, "nesting" interrupts
in this way should only be done when there is a clear understanding of latency and of
the arbitration mechanism. Refer to SECTION 5 RESETS AND INTERRUPTS.
3.1.6.6 Half Carry (H)
The H bit is set when a carry occurs between bits 3 and 4 of the arithmetic logic unit
during an ADD, ABA, or ADC instruction. Otherwise, the H bit is cleared. Half carry is
used during BCD operations.
3.1.6.7 X Interrupt Mask (X)
The XIRQ mask (X) bit disables interrupts from the XIRQ pin. After any reset, X is set
by default and must be cleared by a software instruction. When an XIRQ interrupt is
recognized, the X and I bits are set after the registers are stacked, but before the in-
terrupt vector is fetched. After the interrupt has been serviced, an RTI instruction is
normally executed, causing the registers to be restored to the values that were present
before the interrupt occurred. The X interrupt mask bit is set only by hardware (RESET
or XIRQ acknowledge). X is cleared only by program instruction (TAP, where the as-
sociated bit of A is zero; or RTI, where bit 6 of the value loaded into the CCR from the
stack has been cleared). There is no hardware action for clearing X.

MC68HC11F1
CENTRAL PROCESSING UNIT
MOTOROLA
TECHNICAL DATA
3-7
3.1.6.8 Stop Disable (S)
Setting the STOP disable (S) bit prevents the STOP instruction from putting the
M68HC11 into a low-power stop condition. If the CPU encounters a STOP instruction
while the S bit is set, it is treated as a no-operation (NOP) instruction, and processing
continues to the next instruction. S is set by reset -- STOP disabled by default.
3.2 Data Types
The M68HC11 CPU supports the following data types:
∑ Bit data
∑ 8-bit and 16-bit signed and unsigned integers
∑ 16-bit unsigned fractions
∑ 16-bit addresses
A byte is eight bits wide and can be accessed at any byte location. A word is composed
of two consecutive bytes with the most significant byte at the lower value address. Be-
cause the M68HC11 is an 8-bit CPU, there are no special requirements for alignment
of instructions or operands.
3.3 Opcodes and Operands
The M68HC11 family of microcontrollers uses 8-bit opcodes. Each opcode identifies
a particular instruction and associated addressing mode to the CPU. Several opcodes
are required to provide each instruction with a range of addressing capabilities. Only
256 opcodes would be available if the range of values were restricted to the number
able to be expressed in 8-bit binary numbers.
A four-page opcode map has been implemented to expand the number of instructions.
An additional byte, called a prebyte, directs the processor from page 0 of the opcode
map to one of the other three pages. As its name implies, the additional byte precedes
the opcode.
A complete instruction consists of a prebyte, if any, an opcode, and zero, one, two, or
three operands. The operands contain information the CPU needs for executing the
instruction. Complete instructions can be from one to five bytes long.
3.4 Addressing Modes
Six addressing modes can be used to access memory: immediate, direct, extended,
indexed, inherent, and relative. These modes are detailed in the following paragraphs.
All modes except inherent mode use an effective address. The effective address is the
memory address from which the argument is fetched or stored, or the address from
which execution is to proceed. The effective address can be specified within an in-
struction, or it can be calculated.
3.4.1 Immediate
In the immediate addressing mode an argument is contained in the byte(s) immediate-
ly following the opcode. The number of bytes following the opcode matches the size
of the register or memory location being operated on. There are two-, three-, and four-

MOTOROLA
CENTRAL PROCESSING UNIT
MC68HC11F1
3-8
TECHNICAL DATA
(if prebyte is required) byte immediate instructions. The effective address is the ad-
dress of the byte following the instruction.
3.4.2 Direct
In the direct addressing mode, the low-order byte of the operand address is contained
in a single byte following the opcode, and the high-order byte of the address is as-
sumed to be $00. Addresses $00≠$FF are thus accessed directly, using two-byte in-
structions. Execution time is reduced by eliminating the additional memory access
required for the high-order address byte. In most applications, this 256-byte area is re-
served for frequently referenced data. In M68HC11 MCUs, the memory map can be
configured for combinations of internal registers, RAM, or external memory to occupy
these addresses.
3.4.3 Extended
In the extended addressing mode, the effective address of the argument is contained
in two bytes following the opcode byte. These are three-byte instructions (or four-byte
instructions if a prebyte is required). One or two bytes are needed for the opcode and
two for the effective address.
3.4.4 Indexed
In the indexed addressing mode, an 8-bit unsigned offset contained in the instruction
is added to the value contained in an index register (IX or IY). The sum is the effective
address. This addressing mode allows referencing any memory location in the 64
Kbyte address space. These are two- to five-byte instructions, depending on whether
or not a prebyte is required.
3.4.5 Inherent
In the inherent addressing mode, all the information necessary to execute the instruc-
tion is contained in the opcode. Operations that use only the index registers or accu-
mulators, as well as control instructions with no arguments, are included in this
addressing mode. These are one- or two-byte instructions.
3.4.6 Relative
The relative addressing mode is used only for branch instructions. If the branch con-
dition is true, an 8-bit signed offset included in the instruction is added to the contents
of the program counter to form the effective branch address. Otherwise, control pro-
ceeds to the next instruction. These are usually two-byte instructions.
3.5 Instruction Set
Refer to Table 3-2, which shows all the M68HC11 instructions in all possible address-
ing modes. For each instruction, the table shows the operand construction, the num-
ber of machine code bytes, and execution time in CPU E clock cycles.

MC68HC11F1
CENTRAL PROCESSING UNIT
MOTOROLA
TECHNICAL DATA
3-9
Table 3-2 Instruction Set (Sheet 1 of 6)
Mnemonic
Operation
Description
Addressing
Instruction
Condition Codes
Mode Opcode
Operand
Cycles
S
X
H
I
N
Z
V
C
ABA
Add
Accumulators
A + B
A
INH
1B
--
2
--
--
--
ABX
Add B to X
IX + (00 : B)
IX
INH
3A
--
3
--
--
--
--
--
--
--
--
ABY
Add B to Y
IY + (00 : B)
IY
INH
18
3A
--
4
--
--
--
--
--
--
--
--
ADCA (opr)
Add with Carry
to A
A + M + C
A
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
89
99
B9
A9
18
A9
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
ADCB (opr)
Add with Carry
to B
B + M + C
B
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
C9
D9
F9
E9
18
E9
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
ADDA (opr)
Add Memory
to A
A + M
A
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
8B
9B
BB
AB
18
AB
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
ADDB (opr)
Add Memory
to B
B + M
B
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
CB
DB
FB
EB
18
EB
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
ADDD (opr)
Add 16-Bit to D D + (M : M + 1)
D
IMM
DIR
EXT
IND,X
IND,Y
C3
D3
F3
E3
18 E3
jj kk
dd
hh ll
ff
ff
4
5
6
6
7
--
--
--
--
ANDA (opr)
AND A with
Memory
A ∑ M
A
A
IMM
A DIR
A EXT
A
IND,X
A
IND,Y
84
94
B4
A4
18 A4
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
ANDB (opr)
AND B with
Memory
B ∑ M
B
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
C4
D4
F4
E4
18
E4
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
ASL (opr)
Arithmetic
Shift Left
EXT
IND,X
IND,Y
78
68
18
68
hh ll
ff
ff
6
6
7
--
--
--
--
ASLA
Arithmetic
Shift Left A
A
INH
48
--
2
--
--
--
--
ASLB
Arithmetic
Shift Left B
B
INH
58
--
2
--
--
--
--
ASLD
Arithmetic
Shift Left D
INH
05
--
3
--
--
--
--
ASR Arithmetic
Shift Right
EXT
IND,X
IND,Y
77
67
18
67
hh ll
ff
ff
6
6
7
--
--
--
--
ASRA
Arithmetic
Shift Right A
A
INH
47
--
2
--
--
--
--
ASRB
Arithmetic
Shift Right B
B
INH
57
--
2
--
--
--
--
BCC (rel)
Branch if Carry
Clear
? C = 0
REL
24
rr
3
--
--
--
--
--
--
--
--
BCLR (opr)
(msk)
Clear Bit(s)
M ∑ (mm)
M
DIR
IND,X
IND,Y
15
1D
18
1D
dd mm
ff mm
ff mm
6
7
8
--
--
--
--
0
--
BCS (rel)
Branch if Carry
Set
? C = 1
REL
25
rr
3
--
--
--
--
--
--
--
--
BEQ (rel)
Branch if =
Zero
? Z = 1
REL
27
rr
3
--
--
--
--
--
--
--
--
BGE (rel)
Branch if
Zero
? N
V = 0
REL
2C
rr
3
--
--
--
--
--
--
--
--
C
0
b7
b0
C
0
b7
b0
C
0
b7
b0
C
0
b7
b0
A
B
b7
b0
C
b7
b0
C
b7
b0
C
b7
b0

MOTOROLA
CENTRAL PROCESSING UNIT
MC68HC11F1
3-10
TECHNICAL DATA
BGT (rel)
Branch if >
Zero
? Z + (N
V) = 0
REL
2E
rr
3
--
--
--
--
--
--
--
--
BHI (rel)
Branch if
Higher
? C + Z = 0
REL
22
rr
3
--
--
--
--
--
--
--
--
BHS (rel)
Branch if
Higher or
Same
? C = 0
REL
24
rr
3
--
--
--
--
--
--
--
--
BITA (opr)
Bit(s) Test A
with Memory
A ∑ M
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
85
95
B5
A5
18
A5
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
BITB (opr)
Bit(s) Test B
with Memory
B ∑ M
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
C5
D5
F5
E5
18
E5
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
BLE (rel)
Branch if
Zero
? Z + (N
V) = 1
REL
2F
rr
3
--
--
--
--
--
--
--
--
BLO (rel)
Branch if
Lower
? C = 1
REL
25
rr
3
--
--
--
--
--
--
--
--
BLS (rel)
Branch if
Lower or
Same
? C + Z = 1
REL
23
rr
3
--
--
--
--
--
--
--
--
BLT (rel)
Branch if <
Zero
? N
V = 1
REL
2D
rr
3
--
--
--
--
--
--
--
--
BMI (rel)
Branch if
Minus
? N = 1
REL
2B
rr
3
--
--
--
--
--
--
--
--
BNE (rel)
Branch if not =
Zero
? Z = 0
REL
26
rr
3
--
--
--
--
--
--
--
--
BPL (rel)
Branch if Plus
? N = 0
REL
2A
rr
3
--
--
--
--
--
--
--
--
BRA (rel)
Branch Always
? 1 = 1
REL
20
rr
3
--
--
--
--
--
--
--
--
BRCLR(opr)
(msk)
(rel)
Branch if
Bit(s) Clear
? M ∑ mm = 0
DIR
IND,X
IND,Y
13
1F
18
1F
dd mm rr
ff mm rr
ff mm rr
6
7
8
--
--
--
--
--
--
--
--
BRN (rel)
Branch Never
? 1 = 0
REL
21
rr
3
--
--
--
--
--
--
--
--
BRSET(opr)
(msk)
(rel)
Branch if Bit(s)
Set
? (M) ∑ mm = 0
DIR
IND,X
IND,Y
12
1E
18
1E
dd mm rr
ff mm rr
ff mm rr
6
7
8
--
--
--
--
--
--
--
--
BSET (opr)
(msk)
Set Bit(s)
M + mm
M
DIR
IND,X
IND,Y
14
1C
18
1C
dd mm
ff mm
ff mm
6
7
8
--
--
--
--
0
--
BSR (rel)
Branch to
Subroutine
See Figure 3≠2
REL
8D
rr
6
--
--
--
--
--
--
--
--
BVC (rel)
Branch if
Overflow Clear
? V = 0
REL
28
rr
3
--
--
--
--
--
--
--
--
BVS (rel)
Branch if
Overflow Set
? V = 1
REL
29
rr
3
--
--
--
--
--
--
--
--
CBA
Compare A to
B
A ≠ B
INH
11
--
2
--
--
--
--
CLC
Clear Carry Bit
0
C
INH
0C
--
2
--
--
--
--
--
--
--
0
CLI
Clear Interrupt
Mask
0
I
INH
0E
--
2
--
--
--
0
--
--
--
--
CLR (opr)
Clear Memory
Byte
0
M
EXT
IND,X
IND,Y
7F
6F
18
6F
hh ll
ff
ff
6
6
7
--
--
--
--
0
1
0
0
CLRA
Clear
Accumulator A
0
A
A
INH
4F
--
2
--
--
--
--
0
1
0
0
CLRB
Clear
Accumulator B
0
B
B
INH
5F
--
2
--
--
--
--
0
1
0
0
CLV
Clear Overflow
Flag
0
V
INH
0A
--
2
--
--
--
--
--
--
0
--
CMPA (opr)
Compare A to
Memory
A ≠ M
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
81
91
B1
A1
18
A1
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
CMPB (opr)
Compare B to
Memory
B ≠ M
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
C1
D1
F1
E1
18
E1
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
Table 3-2 Instruction Set (Sheet 2 of 6)
Mnemonic
Operation
Description
Addressing
Instruction
Condition Codes
Mode Opcode
Operand
Cycles
S
X
H
I
N
Z
V
C

MC68HC11F1
CENTRAL PROCESSING UNIT
MOTOROLA
TECHNICAL DATA
3-11
COM (opr)
Ones
Complement
Memory Byte
$FF ≠ M
M
EXT
IND,X
IND,Y
73
63
18
63
hh ll
ff
ff
6
6
7
--
--
--
--
0
1
COMA
Ones
Complement
A
$FF ≠ A
A
A
INH
43
--
2
--
--
--
--
0
1
COMB
Ones
Complement
B
$FF ≠ B
B
B
INH
53
--
2
--
--
--
--
0
1
CPD (opr)
Compare D to
Memory 16-Bit
D ≠ M : M + 1
IMM
DIR
EXT
IND,X
IND,Y
1A
83
1A
93
1A
B3
1A
A3
CD
A3
jj kk
dd
hh ll
ff
ff
5
6
7
7
7
--
--
--
--
CPX (opr)
Compare X to
Memory 16-Bit
IX ≠ M : M + 1
IMM
DIR
EXT
IND,X
IND,Y
8C
9C
BC
AC
CD
AC
jj kk
dd
hh ll
ff
ff
4
5
6
6
7
--
--
--
--
CPY (opr)
Compare Y to
Memory 16-Bit
IY ≠ M : M + 1
IMM
DIR
EXT
IND,X
IND,Y
18
8C
18
9C
18
BC
1A
AC
18
AC
jj kk
dd
hh ll
ff
ff
5
6
7
7
7
--
--
--
--
DAA
Decimal Adjust
A
Adjust Sum to BCD
INH
19
--
2
--
--
--
--
DEC (opr)
Decrement
Memory Byte
M ≠ 1
M
EXT
IND,X
IND,Y
7A
6A
18
6A
hh ll
ff
ff
6
6
7
--
--
--
--
--
DECA
Decrement
Accumulator
A
A ≠ 1
A
A
INH
4A
--
2
--
--
--
--
--
DECB
Decrement
Accumulator
B
B ≠ 1
B
B
INH
5A
--
2
--
--
--
--
--
DES
Decrement
Stack Pointer
SP ≠ 1
SP
INH
34
--
3
--
--
--
--
--
--
--
--
DEX
Decrement
Index Register
X
IX ≠ 1
IX
INH
09
--
3
--
--
--
--
--
--
--
DEY
Decrement
Index Register
Y
IY ≠ 1
IY
INH
18
09
--
4
--
--
--
--
--
--
--
EORA (opr)
Exclusive OR
A with Memory
A
M
A
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
88
98
B8
A8
18
A8
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
EORB (opr)
Exclusive OR
B with Memory
B
M
B
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
C8
D8
F8
E8
18
E8
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
FDIV
Fractional
Divide 16 by
16
D / IX
IX; r
D
INH
03
--
41
--
--
--
--
--
IDIV
Integer Divide
16 by 16
D / IX
IX; r
D
INH
02
--
41
--
--
--
--
--
0
INC (opr)
Increment
Memory Byte
M + 1
M
EXT
IND,X
IND,Y
7C
6C
18
6C
hh ll
ff
ff
6
6
7
--
--
--
--
--
INCA
Increment
Accumulator
A
A + 1
A
A
INH
4C
--
2
--
--
--
--
--
INCB
Increment
Accumulator
B
B + 1
B
B
INH
5C
--
2
--
--
--
--
--
INS
Increment
Stack Pointer
SP + 1
SP
INH
31
--
3
--
--
--
--
--
--
--
--
INX
Increment
Index Register
X
IX + 1
IX
INH
08
--
3
--
--
--
--
--
--
--
Table 3-2 Instruction Set (Sheet 3 of 6)
Mnemonic
Operation
Description
Addressing
Instruction
Condition Codes
Mode Opcode
Operand
Cycles
S
X
H
I
N
Z
V
C

MOTOROLA
CENTRAL PROCESSING UNIT
MC68HC11F1
3-12
TECHNICAL DATA
INY
Increment
Index Register
Y
IY + 1
IY
INH
18
08
--
4
--
--
--
--
--
--
--
JMP (opr)
Jump
See Figure 3≠2
EXT
IND,X
IND,Y
7E
6E
18
6E
hh ll
ff
ff
3
3
4
--
--
--
--
--
--
--
--
JSR (opr)
Jump to
Subroutine
See Figure 3≠2
DIR
EXT
IND,X
IND,Y
9D
BD
AD
18
AD
dd
hh ll
ff
ff
5
6
6
7
--
--
--
--
--
--
--
--
LDAA (opr)
Load
Accumulator
A
M
A
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
86
96
B6
A6
18
A6
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
LDAB (opr)
Load
Accumulator
B
M
B
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
C6
D6
F6
E6
18
E6
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
LDD (opr)
Load Double
Accumulator
D
M
A,M + 1
B
IMM
DIR
EXT
IND,X
IND,Y
CC
DC
FC
EC
18
EC
jj kk
dd
hh ll
ff
ff
3
4
5
5
6
--
--
--
--
0
--
LDS (opr)
Load Stack
Pointer
M : M + 1
SP
IMM
DIR
EXT
IND,X
IND,Y
8E
9E
BE
AE
18
AE
jj kk
dd
hh ll
ff
ff
3
4
5
5
6
--
--
--
--
0
--
LDX (opr)
Load Index
Register
X
M : M + 1
IX
IMM
DIR
EXT
IND,X
IND,Y
CE
DE
FE
EE
CD
EE
jj kk
dd
hh ll
ff
ff
3
4
5
5
6
--
--
--
--
0
--
LDY (opr)
Load Index
Register
Y
M : M + 1
IY
IMM
DIR
EXT
IND,X
IND,Y
18
CE
18
DE
18
FE
1A
EE
18
EE
jj kk
dd
hh ll
ff
ff
4
5
6
6
6
--
--
--
--
0
--
LSL (opr)
Logical Shift
Left
EXT
IND,X
IND,Y
78
68
18
68
hh ll
ff
ff
6
6
7
--
--
--
--
LSLA Logical
Shift
Left A
A
INH
48
--
2
--
--
--
--
LSLB
Logical Shift
Left B
B
INH
58
--
2
--
--
--
--
LSLD
Logical Shift
Left Double
INH
05
--
3
--
--
--
--
LSR (opr)
Logical Shift
Right
EXT
IND,X
IND,Y
74
64
18
64
hh ll
ff
ff
6
6
7
--
--
--
--
0
LSRA
Logical Shift
Right A
A
INH
44
--
2
--
--
--
--
0
LSRB
Logical Shift
Right B
B
INH
54
--
2
--
--
--
--
0
LSRD
Logical Shift
Right Double
INH
04
--
3
--
--
--
--
0
MUL
Multiply 8 by 8
A
B
D
INH
3D
--
10
--
--
--
--
--
--
--
NEG (opr)
Two's
Complement
Memory Byte
0 ≠ M
M
EXT
IND,X
IND,Y
70
60
18
60
hh ll
ff
ff
6
6
7
--
--
--
--
NEGA
Two's
Complement
A
0 ≠ A
A
A
INH
40
--
2
--
--
--
--
NEGB
Two's
Complement
B
0 ≠ B
B
B
INH
50
--
2
--
--
--
--
Table 3-2 Instruction Set (Sheet 4 of 6)
Mnemonic
Operation
Description
Addressing
Instruction
Condition Codes
Mode Opcode
Operand
Cycles
S
X
H
I
N
Z
V
C
C
0
b7
b0
C
0
b7
b0
C
0
b7
b0
C
0
b7
b0
A
B
b7
b0
C
0
b7
b0
C
0
b7
b0
C
0
b7
b0
C
0
b7
b0
A
B
b7
b0

MC68HC11F1
CENTRAL PROCESSING UNIT
MOTOROLA
TECHNICAL DATA
3-13
NOP
No operation
No Operation
INH
01
--
2
--
--
--
--
--
--
--
--
ORAA (opr)
OR
Accumulator
A (Inclusive)
A + M
A
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
8A
9A
BA
AA
18
AA
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
ORAB (opr)
OR
Accumulator
B (Inclusive)
B + M
B
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
CA
DA
FA
EA
18
EA
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
0
--
PSHA
Push A onto
Stack
A
Stk,SP = SP ≠ 1 A
INH
36
--
3
--
--
--
--
--
--
--
--
PSHB
Push B onto
Stack
B
Stk,SP = SP ≠ 1 B
INH
37
--
3
--
--
--
--
--
--
--
--
PSHX
Push X onto
Stack (Lo
First)
IX
Stk,SP = SP ≠ 2
INH
3C
--
4
--
--
--
--
--
--
--
--
PSHY
Push Y onto
Stack (Lo
First)
IY
Stk,SP = SP ≠ 2
INH
18
3C
--
5
--
--
--
--
--
--
--
--
PULA
Pull A from
Stack
SP = SP + 1, A
Stk A
INH
32
--
4
--
--
--
--
--
--
--
--
PULB
Pull B from
Stack
SP = SP + 1, B
Stk B
INH
33
--
4
--
--
--
--
--
--
--
--
PULX
Pull X From
Stack (Hi
First)
SP = SP + 2, IX
Stk
INH
38
--
5
--
--
--
--
--
--
--
--
PULY
Pull Y from
Stack (Hi
First)
SP = SP + 2, IY
Stk
INH
18
38
--
6
--
--
--
--
--
--
--
--
ROL (opr)
Rotate Left
EXT
IND,X
IND,Y
79
69
18
69
hh ll
ff
ff
6
6
7
--
--
--
--
ROLA
Rotate Left A
A
INH
49
--
2
--
--
--
--
ROLB
Rotate Left B
B
INH
59
--
2
--
--
--
--
ROR (opr)
Rotate Right
EXT
IND,X
IND,Y
76
66
18
66
hh ll
ff
ff
6
6
7
--
--
--
--
RORA
Rotate Right A
A
INH
46
--
2
--
--
--
--
RORB
Rotate Right B
B
INH
56
--
2
--
--
--
--
RTI
Return from
Interrupt
See Figure 3≠2
INH
3B
--
12
RTS
Return from
Subroutine
See Figure 3≠2
INH
39
--
5
--
--
--
--
--
--
--
--
SBA
Subtract B
from A
A ≠ B
A
INH
10
--
2
--
--
--
--
SBCA (opr)
Subtract with
Carry from A
A ≠ M ≠ C
A
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
82
92
B2
A2
18
A2
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
SBCB (opr)
Subtract with
Carry from B
B ≠ M ≠ C
B
B
IMM
B
DIR
B
EXT
B
IND,X
B
IND,Y
C2
D2
F2
E2
18
E2
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
SEC
Set Carry
1
C
INH
0D
--
2
--
--
--
--
--
--
--
1
SEI
Set Interrupt
Mask
1
I
INH
0F
--
2
--
--
--
1
--
--
--
--
SEV
Set Overflow
Flag
1
V
INH
0B
--
2
--
--
--
--
--
--
1
--
STAA (opr)
Store
Accumulator
A
A
M
A
DIR
A
EXT
A
IND,X
A
IND,Y
97
B7
A7
18
A7
dd
hh ll
ff
ff
3
4
4
5
--
--
--
--
0
--
Table 3-2 Instruction Set (Sheet 5 of 6)
Mnemonic
Operation
Description
Addressing
Instruction
Condition Codes
Mode Opcode
Operand
Cycles
S
X
H
I
N
Z
V
C
C
b7
b0
C
b7
b0
C
b7
b0
C
b7
b0
C
b7
b0
C
b7
b0

MOTOROLA
CENTRAL PROCESSING UNIT
MC68HC11F1
3-14
TECHNICAL DATA
STAB (opr)
Store
Accumulator
B
B
M
B
DIR
B
EXT
B
IND,X
B
IND,Y
D7
F7
E7
18
E7
dd
hh ll
ff
ff
3
4
4
5
--
--
--
--
0
--
STD (opr)
Store
Accumulator
D
A
M, B
M + 1
DIR
EXT
IND,X
IND,Y
DD
FD
ED
18
ED
dd
hh ll
ff
ff
4
5
5
6
--
--
--
--
0
--
STOP
Stop Internal
Clocks
--
INH
CF
--
2
--
--
--
--
--
--
--
--
STS (opr)
Store Stack
Pointer
SP
M : M + 1
DIR
EXT
IND,X
IND,Y
9F
BF
AF
18
AF
dd
hh ll
ff
ff
4
5
5
6
--
--
--
--
0
--
STX (opr)
Store Index
Register X
IX
M : M + 1
DIR
EXT
IND,X
IND,Y
DF
FF
EF
CD
EF
dd
hh ll
ff
ff
4
5
5
6
--
--
--
--
0
--
STY (opr)
Store Index
Register Y
IY
M : M + 1
DIR
EXT
IND,X
IND,Y
18
DF
18
FF
1A
EF
18
EF
dd
hh ll
ff
ff
5
6
6
6
--
--
--
--
0
--
SUBA (opr)
Subtract
Memory from
A
A ≠ M
A
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
80
90
B0
A0
18
A0
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
SUBB (opr)
Subtract
Memory from
B
B ≠ M
B
A
IMM
A
DIR
A
EXT
A
IND,X
A
IND,Y
C0
D0
F0
E0
18
E0
ii
dd
hh ll
ff
ff
2
3
4
4
5
--
--
--
--
SUBD (opr)
Subtract
Memory from
D
D ≠ M : M + 1
D
IMM
DIR
EXT
IND,X
IND,Y
83
93
B3
A3
18
A3
jj kk
dd
hh ll
ff
ff
4
5
6
6
7
--
--
--
--
SWI
Software
Interrupt
See Figure 3≠2
INH
3F
--
14
--
--
--
1
--
--
--
--
TAB
Transfer A to B
A
B
INH
16
--
2
--
--
--
--
0
--
TAP
Transfer A to
CC Register
A
CCR
INH
06
--
2
TBA
Transfer B to A
B
A
INH
17
--
2
--
--
--
--
0
--
TEST
TEST (Only in
Test Modes)
Address Bus Counts
INH
00
--
*
--
--
--
--
--
--
--
--
TPA
Transfer CC
Register to A
CCR
A
INH
07
--
2
--
--
--
--
--
--
--
--
TST (opr)
Test for Zero
or Minus
M ≠ 0
EXT
IND,X
IND,Y
7D
6D
18
6D
hh ll
ff
ff
6
6
7
--
--
--
--
0
0
TSTA
Test A for Zero
or Minus
A ≠ 0
A
INH
4D
--
2
--
--
--
--
0
0
TSTB
Test B for Zero
or Minus
B ≠ 0
B
INH
5D
--
2
--
--
--
--
0
0
TSX
Transfer
Stack Pointer
to X
SP + 1
IX
INH
30
--
3
--
--
--
--
--
--
--
--
TSY
Transfer
Stack Pointer
to Y
SP + 1
IY
INH
18
30
--
4
--
--
--
--
--
--
--
--
TXS
Transfer X to
Stack Pointer
IX ≠ 1
SP
INH
35
--
3
--
--
--
--
--
--
--
--
TYS
Transfer Y to
Stack Pointer
IY ≠ 1
SP
INH
18
35
--
4
--
--
--
--
--
--
--
--
WAI
Wait for
Interrupt
Stack Regs & WAIT
INH
3E
--
**
--
--
--
--
--
--
--
--
XGDX
Exchange D
with X
IX
D, D
IX
INH
8F
--
3
--
--
--
--
--
--
--
--
XGDY
Exchange D
with Y
IY
D, D
IY
INH
18
8F
--
4
--
--
--
--
--
--
--
--
Table 3-2 Instruction Set (Sheet 6 of 6)
Mnemonic
Operation
Description
Addressing
Instruction
Condition Codes
Mode Opcode
Operand
Cycles
S
X
H
I
N
Z
V
C

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-1
SECTION 4OPERATING MODES AND ON-CHIP MEMORY
This section contains information about the modes that define MC68HC11F1 operat-
ing conditions, and about the on-chip memory that allows the MCU to be configured
for various applications.
4.1 Operating Modes
The values of the mode select inputs MODB and MODA during reset determine the
operating mode. Single chip and expanded modes are the normal modes. In single-
chip mode only on-board resources are available. Expanded mode, however, allows
access to external memory or peripheral devices. Each of these two normal modes is
paired with a special mode. Bootstrap mode, a variation of the single-chip mode, exe-
cutes a bootloader program from an internal bootstrap ROM. Test mode allows privi-
leged access to internal resources.
4.1.1 Single-Chip Operating Mode
In single-chip operating mode, the MC68HC11F1 has no external address or data bus.
Ports B, C, and F are available for general-purpose I/O.
4.1.2 Expanded Operating Mode
In expanded operating mode, the MCU can access a 64-Kbyte physical address
space. The address space includes the same on-chip memory addresses used for sin-
gle-chip mode, in addition to external memory and peripheral devices.
The expansion bus is made up of ports B, C, F and the R/W signal. In expanded mode,
high order address bits are output on the port B pins, low order address bits on the port
F pins, and the data bus on port C. The R/W pin indicates the direction of data transfer
on the port C bus.
4.1.3 Special Test Mode
Special test mode, a variation of the expanded mode, is primarily used during Motor-
ola's internal production testing; however, it is accessible for programming the CON-
FIG register, programming calibration data into EEPROM, and supporting emulation
and debugging during development.
4.1.4 Special Bootstrap Mode
Bootstrap mode is a special variation of the single-chip mode. Bootstrap mode allows
special-purpose programs to be entered into internal RAM. When boot mode is select-
ed at reset, a small bootstrap ROM becomes present in the memory map. Reset and
interrupt vectors are located in bootstrap ROM at $BFC0≠$BFFF. The MCU fetches
the reset vector, then executes the bootloader.

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-2
TECHNICAL DATA
The bootstrap ROM contains a small program which initializes the SCI and allows the
user to download a program of up to 1024 bytes into on-chip RAM. After a four-char-
acter delay, or after receiving the character for address $03FF, control passes to the
loaded program at $0000. An external pull-up resistor is required when using the SCI
transmitter pin (TxD) because port D pins are configured for wired-OR operation by
the bootloader. In bootstrap mode, the interrupt vectors point to RAM. This allows the
use of interrupts through a jump table. Refer to Motorola application note AN1060,
M68HC11 Bootstrap Mode.
4.2 On-Chip Memory
The MC68HC11F1 contains 1024 bytes of on-chip RAM and 512 bytes of EEPROM.
The bootloader ROM occupies 256 bytes. The CONFIG register is implemented as a
separate EEPROM byte.
4.2.1 Mapping Allocations
Memory locations for on-chip resources are the same for both expanded and single-
chip modes. The 96-byte register block originates at $1000 after reset and can be
placed at any other 4-Kbyte boundary ($x000) after reset by writing an appropriate val-
ue to the INIT register. Refer to Figure 4-1, which illustrates the memory map.
The on-board 1024-byte RAM is initially located at $0000 after reset. If RAM and reg-
isters are both mapped to the same 4-Kbyte boundary, the first 96 bytes of RAM are
inaccessible (registers have higher priority). Remapping is accomplished by writing
appropriate values to the INIT register.
The 512-byte EEPROM array is initially located at $FE00 after reset when EEPROM
is enabled in the memory map by the CONFIG register. In expanded and special test
modes EEPROM can be placed at any other 4-Kbyte boundary ($xE00) by program-
ming bits EE[3:0] in the CONFIG register to an appropriate value. In single-chip and
bootstrap modes the EEPROM is forced on and cannot be remapped.
In special bootstrap mode, a bootloader ROM is enabled at locations $BF00≠$BFFF.
The vectors for special bootstrap mode are contained in the bootloader program. The
boot ROM fills 256 bytes of the memory map even though not all locations are used.

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-3
4.2.2 Memory Map
Figure 4-1 MC68HC11F1 Memory Map
4.2.2.1 RAM
The MC68HC11F1 microcontroller has 1024 bytes of fully static RAM that can be used
for storing instructions, variables, and temporary data during program execution. RAM
can be placed at any 4-Kbyte boundary in the 64 Kbyte address space by writing an
appropriate value to the INIT register.
RAM is initially located at $0000 in the memory map upon reset. Direct addressing
mode can access the first 256 locations of RAM using a one-byte address operand.
Direct mode accesses save program memory space and execution time.
The on-chip RAM is a fully static memory. RAM contents can be preserved during pe-
riods of processor inactivity by either of two methods, both of which reduce power con-
sumption.
NOTES:
1. RAM can be remapped to any 4-Kbyte boundary ($x000). "x" represents the value contained in
RAM[3:0] in the init register.
2. The register block can be remapped to any 4-Kbyte boundary ($y000). "y" represents the value contained in
reg[3:0] in the init register.
3. Special test mode vectors are externally addressed.
4. In special test mode the address locations $zD00≠$zDFF are not externally addressable.
"z" represents the value of bits EE[3:0] in the config register.
5. EEPROM can be remapped to any 4-Kbyte boundary ($z000). "z" represents the value contained in
EE[3:0] in the config register.
zE00
EXPANDED
512 BYTES EEPROM
5
FFC0
FFFF
NORMAL MODE
INTERRUPT
VECTORS
1024 BYTES RAM
1
SINGLE
CHIP
BOOTSTRAP
SPECIAL
TEST
EXT
$0000
$1000
$FFFF
x000
y000
y05F
BF00
zFFF
BFC0
BFFF
SPECIAL MODE
3
INTERRUPT
VECTORS
EXT
x3FF
96-BYTE REGISTER BLOCK
2
$FE00
256 BYTES BOOTSTRAP ROM
zD00
256 BYTES RESERVED
4
(SPECIAL TEST MODE ONLY)
zDFF
EXT
EXT
EXT

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-4
TECHNICAL DATA
During the software-based STOP mode, MCU clocks are stopped, but the MCU con-
tinues to draw power from V
DD
. Power supply current is directly proportional to oper-
ating frequency in CMOS integrated circuits and there is very little leakage when the
clocks are stopped. These two factors reduce power consumption while the MCU is in
STOP mode.
To reduce power consumption to a minimum, V
DD
can be turned off, and the MODB/
V
STBY
pin can be used to supply RAM power from either a battery back-up or a sec-
ond power supply. Although this method requires external hardware, it is very effec-
tive. Refer to SECTION 2 PIN DESCRIPTIONS for information about how to connect
the standby RAM power supply. Refer to SECTION 5 RESETS AND INTERRUPTS
for a description of low power operation.
Figure 4-2 RAM Standby MODB/V
STBY
Connections
4.2.2.2 Bootloader ROM
The bootloader ROM is enabled at address $BF00≠$BFFF during special bootstrap
mode. The reset vector is fetched from this ROM and the MCU executes the bootload-
er firmware. In normal modes, the bootloader ROM is disabled.
4.2.2.3 EEPROM
The MC68HC11F1 contains 512 bytes of electrically erasable programmable read-
only memory (EEPROM). The default location for EEPROM is $FE00≠$FFFF. Other
locations can be chosen according to the values written to EE[3:0] in the CONFIG reg-
ister. In single-chip and bootstrap modes, the EEPROM is forced on and located at the
default position. In these modes, the EEPROM cannot be remapped. In special test
mode, the EEPROM is disabled initially.
4.2.3 Registers
Table 4-1, a summary of registers and control bits, the registers are shown in ascend-
ing order within the 96-byte register block. The addresses shown are for default block
mapping ($1000≠$105F), however, the register block can be remapped to any 4-Kbyte
page ($x000≠$x05F) by the INIT register.
V
BATT
V
DD
TO MODB/V
STBY
OF M68HC11
V
OUT
V
DD
+
MAX
690
4.8 V
NiCd
4.7 k

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-5
Table 4-1 Register and Control Bit Assignments
The register block can be remapped to any 4-Kbyte boundary.
Bit 7
6
5
4
3
2
1
Bit 0
$1000
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
PORTA
$1001
DDA7
DDA6
DDA5
DDA4
DDA3
DDA2
DDA1
DDA0
DDRA
$1002
PG7
PG6
PG5
PG4
PG3
PG2
PG1
PG0
PORTG
$1003
DDG7
DDG6
DDG5
DDG4
DDG3
DDG2
DDG1
DDG0
DDRG
$1004
PB7
PB6
PB5
PB4
PB3
PB2
PB1
PB0
PORTB
$1005
PF7
PF6
PF5
PF4
PF3
PF2
PF1
PF0
PORTF
$1006
PC7
PC6
PC5
PC4
PC3
PC2
PC1
PC0
PORTC
$1007
DDC7
DDC6
DDC5
DDC4
DDC3
DDC2
DDC1
DDC0
DDRC
$1008
0
0
PD5
PD4
PD3
PD2
PD1
PD0
PORTD
$1009
0
0
DDD5
DDD4
DDD3
DDD2
DDD1
DDD0
DDRD
$100A
PE7
PE6
PE5
PE4
PE3
PE2
PE1
PE0
PORTE
$100B
FOC1
FOC2
FOC3
FOC4
FOC5
0
0
0
CFORC
$100C
OC1M7
OC1M6
OC1M5
OC1M4
OC1M3
0
0
0
OC1M
$100D
OC1D7
OC1D6
OC1D5
OC1D4
OC1D3
0
0
0
OC1D
$100E
Bit 15
14
13
12
11
10
9
Bit 8
TCNT (High)
$100F
Bit 7
6
5
4
3
2
1
Bit 0
TCNT (Low)
$1010
Bit 15
14
13
12
11
10
9
Bit 8
TIC1 (High)
$1011
Bit 7
6
5
4
3
2
1
Bit 0
TIC1 (Low)
$1012
Bit 15
14
13
12
11
10
9
Bit 8
TIC2 (High)
$1013
Bit 7
6
5
4
3
2
1
Bit 0
TIC2 (Low)
$1014
Bit 15
14
13
12
11
10
9
Bit 8
TIC3 (High)
$1015
Bit 7
6
5
4
3
2
1
Bit 0
TIC3 (Low)
$1016
Bit 15
14
13
12
11
10
9
Bit 8
TOC1 (High)
$1017
Bit 7
6
5
4
3
2
1
Bit 0
TOC1 (Low)
$1018
Bit 15
14
13
12
11
10
9
Bit 8
TOC2 (High)
$1019
Bit 7
6
5
4
3
2
1
Bit 0
TOC2 (Low)
$101A
Bit 15
14
13
12
11
10
9
Bit 8
TOC3 (High)
$101B
Bit 7
6
5
4
3
2
1
Bit 0
TOC3 (Low)
$101C
Bit 15
14
13
12
11
10
9
Bit 8
TOC4 (High)
$101D
Bit 7
6
5
4
3
2
1
Bit 0
TOC4 (Low)
$101E
Bit 15
14
13
12
11
10
9
Bit 8
TI4/O5 (High)
$101F
Bit 7
6
5
4
3
2
1
Bit 0
TI4/O5 (Low)
$1020
OM2
OL2
OM3
OL3
OM4
OL4
OM5
OL5
TCTL1
$1021
EDG4B
EDG4A
EDG1B
EDG1A
EDG2B
EDG2A
EDG3B
EDG3A
TCTL2
$1022
OC1I
OC2I
OC3I
OC4I
I4/O5I
IC1I
IC2I
IC3I
TMSK1
$1023
OC1F
OC2F
OC3F
OC4F
I4/O5F
IC1F
IC2F
IC3F
TFLG1
$1024
TOI
RTII
PAOVI
PAII
0
0
PR1
PR0
TMSK2
$1025
TOF
RTIF
PAOVF
PAIF
0
0
0
0
TFLG2
$1026
0
PAEN
PAMOD
PEDGE
0
I4/O5
RTR1
RTR0
PACTL
$1027
Bit 7
6
5
4
3
2
1
Bit 0
PACNT

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-6
TECHNICAL DATA
4.3 System Initialization
Registers and bits that control initialization and the basic operation of the MCU are pro-
tected against writes except under special circumstances. The following table lists reg-
isters that can be written only once after reset or that must be written within the first 64
cycles after reset.
$1028
SPIE
SPE
DWOM
MSTR
CPOL
CPHA
SPR1
SPR0
SPCR
$1029
SPIF
WCOL
0
MODF
0
0
0
Bit 0
SPSR
$102A
Bit 7
6
5
4
3
2
1
Bit 0
SPDR
$102B
TCLR
0
SCP1
SCP0
RCKB
SCR2
SCR1
SCR0
BAUD
$102C
R8
T8
0
M
WAKE
0
0
0
SCCR1
$102D
TIE
TCIE
RIE
ILIE
TE
RE
RWU
SBK
SCCR2
$102E
TDRE
TC
RDRF
IDLE
OR
NF
FE
0
SCSR
$102F
Bit 7
6
5
4
3
2
1
Bit 0
SCDR
$1030
CCF
0
SCAN
MULT
CD
CC
CB
CA
ADCTL
$1031
Bit 7
6
5
4
3
2
1
Bit 0
ADR1
$1032
Bit 7
6
5
4
3
2
1
Bit 0
ADR2
$1033
Bit 7
6
5
4
3
2
1
Bit 0
ADR3
$1034
Bit 7
6
5
4
3
2
1
Bit 0
ADR4
$1035
0
0
0
PTCON
BPRT3
BPRT2
BPRT1
BPRT0
BPROT
$1036
Reserved
$1037
Reserved
$1038
GWOM
CWOM
CLK4X
0
0
0
0
0
OPT2
$1039
ADPU
CSEL
IRQE
DLY
CME
FCME
CR1
CR0
OPTION
$103A
Bit 7
6
5
4
3
2
1
Bit 0
COPRST
$103B
ODD
EVEN
0
BYTE
ROW
ERASE
EELAT
EEPGM
PPROG
$103C
RBOOT
SMOD
MDA
IRV
PSEL3
PSEL2
PSEL1
PSEL0
HPRIO
$103D
RAM3
RAM2
RAM1
RAM0
REG3
REG2
REG1
REG0
INIT
$103E
TILOP
0
OCCR
CBYP
DISR
FCM
FCOP
0
TEST1
$103F
EE3`
EE2
EE1
EE0
1
NOCOP
1
EEON
CONFIG
$1040
Reserved
to
$105B
Reserved
$105C
IO1SA
IO1SB
IO2SA
IO2SB
GSTHA
GSTHB
PSTHA
PSTHB
CSSTRH
$105D
IO1EN
IO1PL
IO2EN
IO2PL
GCSPR
PCSEN
PSIZA
PSIZB
CSCTL
$105E
GA15
GA14
GA13
GA12
GA11
GA10
0
0
CSGADR
$105F
IO1AV
IO2AV
0
GNPOL
GAVLD
GSIZA
GSIZB
GSIZC
CSGSIZ
Table 4-1 Register and Control Bit Assignments (Continued)
The register block can be remapped to any 4-Kbyte boundary.
Bit 7
6
5
4
3
2
1
Bit 0

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-7
Notes:
1. Bits 1 and 0 can be written once only in first 64 cycles. When SMOD = 1, these bits can be written any time. All
other bits can be written at any time.
2. Bits can be written to zero (protection disabled) once only in first 64 cycles or at any time in special modes. Bits
can be set to one at any time.
3. Bits 5, 4, 2, 1, and 0 can be written once only in first 64 cycles. When SMOD = 1, bits 5, 4, 2, 1, and 0 can be
written at any time. All other bits can be written at any time
4. Bit 5 (CLK4X) can be written only one time.
5. Bit 4 (IRV) can be written only one time.
6. Can be written once in first 64 cycles after reset in normal modes or at any time in special modes.
4.3.1 Mode Selection
The four mode variations are selected by the logic levels present on the MODA and
MODB pins at the rising edge of RESET. The MODA and MODB logic levels determine
the logic state of SMOD and MDA control bits in the HPRIO register.
After reset is released, the mode select pins no longer influence the MCU operating
mode. In single-chip operating mode, the MODA pin is connected to a logic level zero.
In expanded mode, MODA should be connected to V
DD
through a pull-up resistor of
4.7 k
. The MODA pin also functions as the load instruction register (LIR) pin when
the MCU is not in reset. The open-drain active low LIR output pin drives low during the
first E cycle of each instruction (opcode fetch). The MODB pin also functions as stand-
by power input (V
STBY
), which allows RAM contents to be maintained in absence of
V
DD
. Refer to APPENDIX A ELECTRICAL CHARACTERISTICS for V
STBY
voltage
requirements.
Refer to Table 4-3, which is a summary of mode pin operation, the mode control bits,
and the four operating modes.
Table 4-2 Write Access Limited Registers
Register
Address
Register
Name
Must be Written in
First 64 Cycles
Write One Time
Only
$x024
Timer Interrupt Mask 2 (TMSK2)
Note 1
--
$x035
Block Protect Register (BPROT)
Note 2
--
$x038
System Configuration Options 2 (OPT2)
No
Note 4
$x039
System Configuration Options (OPTION)
Note 3
--
$x03C
Highest Priority I-bit and Miscellaneous (HPRIO)
No
Note 5
$x03D
RAM and I/O Map Register (INIT)
Yes
Note 6
Table 4-3 Hardware Mode Select Summary
Input Levels
at Reset
Mode
Control Bits in HPRIO
(Latched at Reset)
MODB
MODA
RBOOT
SMOD
MDA
1
0
Single Chip
0
0
0
1
1
Expanded 0
0
1
0
0
Special Bootstrap
1
1
0
0
1
Special Test
0
1
1

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-8
TECHNICAL DATA
A normal mode is selected when MODB is logic one during reset. One of three reset
vectors is fetched from address $FFFA≠$FFFF, and program execution begins from
the address indicated by this vector. If MODB is logic zero during reset, the special
mode reset vector is fetched from addresses $BFFA≠$BFFF and software has access
to special test features. Refer to SECTION 5 RESETS AND INTERRUPTS for infor-
mation regarding reset vectors.
4.3.1.1 HPRIO Register
Bits in the HPRIO register select the highest priority interrupt level, select whether
bootstrap ROM is present, and control visibility of internal reads by the CPU. After re-
set, MDA and SMOD select the operating mode.
*Reset states of RBOOT, SMOD, and MDA bits depend on hardware mode selection. Refer to Table 4-3.
RBOOT -- Read Bootstrap ROM
Set to one out of reset in bootstrap mode. Valid while in special modes only. Can be
read anytime. Can only be written in special modes.
0 = Bootloader ROM disabled and not in map
1 = Bootloader ROM enabled and in map at $BF00≠$BFFF
SMOD and MDA -- Special Mode Select and Mode Select A
The initial value of SMOD is the inverse of the logic level present on the MODB pin at
the rising edge of reset. The initial value of MDA equals the logic level present on the
MODA pin at the rising edge of reset. These two bits can be read at any time. They can
be written at any time in special modes. Neither bit can be written is normal modes.
SMOD cannot be set once it has been cleared. Refer to Table 4-3.
IRV -- Internal Read Visibility
IRV can be written at any time in special modes (SMOD = 1). In normal modes (SMOD
= 0) IRV can be written only once. In expanded and test modes, IRV determines
whether internal read visibility is on or off. In single-chip and bootstrap modes, IRV has
no meaning or effect.
0 = No internal read visibility on external bus
1 = Data from internal reads is driven out the external data bus.
PSEL[3:0] -- Priority Select Bits [3:0]
Refer to 5.3.1 Highest Priority Interrupt and Miscellaneous Register.
HPRIO -- Highest Priority I-Bit Interrupt and Miscellaneous
$103C
Bit 7
6
5
4
3
2
1
Bit 0
RBOOT*
SMOD*
MDA*
IRV
PSEL3
PSEL2
PSEL1
PSEL0
RESET:
0
0
0
0
0
1
1
0
Single Chip
0
0
1
0
0
1
1
0
Expanded
1
1
0
1
0
1
1
0
Bootstrap
0
1
1
1
0
1
1
0
Special Test

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-9
4.3.2 Initialization
Because bits in the following registers control the basic configuration of the MCU, an
accidental change of their values could cause serious system problems. The protec-
tion mechanism, overridden in special operating modes, requires a write to the protect-
ed bits only within the first 64 bus cycles after any reset, or only once after each reset.
Table 4-2 summarizes the write access limited registers.
4.3.2.1 CONFIG Register
CONFIG controls the presence and position of the EEPROM in the memory map.
CONFIG also enables the COP watchdog timer.
P indicates a previously programmed bit. P(L) indicates that the bit resets to the logic
level held in the latch prior to reset, but the function of COP is controlled by DISR bit
in TEST1 register.
The CONFIG register consists of an EEPROM byte and static latches that control the
start-up configuration of the MCU. The contents of the EEPROM byte are transferred
into static working latches during reset sequences. The operation of the MCU is con-
trolled directly by these latches and not by CONFIG itself. In normal modes, changes
to CONFIG do not affect operation of the MCU until after the next reset sequence.
When programming, the CONFIG register itself is accessed. When the CONFIG reg-
ister is read, the static latches are accessed.
These bits can be read at any time. The value read is the one latched into the register
from the EEPROM cells during the last reset sequence. A new value programmed into
this register cannot be read until after a subsequent reset sequence. Unused bits al-
ways read as ones.
In special test mode, the static latches can be written directly at any time. In all modes,
CONFIG bits can only be programmed using the EEPROM programming sequence,
and are neither readable nor active until latched via the next reset. Refer to 4.4.3 CON-
FIG Register Programming.
EE[3:0] -- EEPROM Mapping Control
EE[3:0] select the upper four bits of the EEPROM base address. In single-chip and
bootstrap modes, EEPROM is forced to $FE00≠$FFFF regardless of the value of
EE[3:0].
CONFIG -- System Configuration Register
$103F
Bit 7
6
5
4
3
2
1
Bit 0
EE3
EE2
EE1
EE0
--
NOCOP
--
EEON
RESET:
1
1
1
1
1
P
1
1
Single Chip
1
1
1
1
1
P(L)
1
1
Bootstrap
P
P
P
P
1
P
1
P
Expanded
P
P
P
P
1
P(L)
1
0
Special Test

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-10
TECHNICAL DATA
Bit 3 -- Not implemented
Always reads one
NOCOP -- COP System Disable
0 = COP system enabled (forces reset on time-out)
1 = COP system disabled
Bit 1 -- Not implemented
Always reads one
EEON -- EEPROM Enable
In single-chip modes EEON is forced to one (EEPROM enabled).
0 = 512 bytes of EEPROM is disabled from the memory map
1 = 512 bytes of EEPROM is present in the memory map
4.3.2.2 INIT Register
The internal registers used to control the operation of the MCU can be relocated on 4-
Kbyte boundaries within the memory space with the use of INIT. This 8-bit special-pur-
pose register can change the default locations of the RAM and control registers within
the MCU memory map. It can be written only once within the first 64 E-clock cycles
after a reset. It then becomes a read-only register.
Table 4-4 EEPROM Mapping
EE[3:0]
EEPROM Position
0 0 0 0
$0E00 ≠ $0FFF
0 0 0 1
$1E00 ≠ $1FFF
0 0 1 0
$2E00 ≠ $2FFF
0 0 1 1
$3E00 ≠ $3FFF
0 1 0 0
$4E00 ≠ $4FFF
0 1 0 1
$5E00 ≠ $5FFF
0 1 1 0
$6E00 ≠ $6FFF
0 1 1 1
$7E00 ≠ $7FFF
1 0 0 0
$8E00 ≠ $8FFF
1 0 0 1
$9E00 ≠ $9FFF
1 0 1 0
$AE00 ≠ $AFFF
1 0 1 1
$BE00 ≠ $BFFF
1 1 0 0
$CE00 ≠ $CFFF
1 1 0 1
$DE00 ≠ $DFFF
1 1 1 0
$EE00 ≠ $EFFF
1 1 1 1
$FE00 ≠ $FFFF
INIT -- RAM and I/O Mapping Register
$103D
Bit 7
6
5
4
3
2
1
Bit 0
RAM3
RAM2
RAM1
RAM0
REG3
REG2
REG1
REG0
RESET:
0
0
0
0
0
0
0
1

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-11
RAM[3:0] -- RAM Map Position
These four bits, which specify the upper hexadecimal digit of the RAM address, control
position of RAM in the memory map. RAM can be positioned at the beginning of any
4-Kbyte page in the memory map. Refer to Table 4-5.
REG[3:0] -- 128-Byte Register Block Position
These four bits specify the upper hexadecimal digit of the address for the 128-byte
block of internal registers. The register block is positioned at the beginning of any 4-
Kbyte page in the memory map. Refer to Table 4-5.
When the memory map has the 96-byte register block mapped at the same location
as RAM, the registers have priority and the lower 96 bytes of RAM are inaccessible.
No harmful conflicts occur due to a hardware resource priority scheme. On-chip reg-
isters have the highest priority of all on-chip resources, followed by on-chip RAM, boot-
strap ROM, and on-chip EEPROM.
4.3.2.3 OPTION Register
The 8-bit special-purpose OPTION register sets internal system configuration options
during initialization. In single-chip and expanded modes (SMOD = 0), IRQE, DLY, FC-
ME, and CR[1:0] can be written only once and only in the first 64 cycles after a reset.
This minimizes the possibility of any accidental changes to the system configuration.
In special test and bootstrap modes (SMOD = 1), these bits can be written at any time.
*Can be written only once in first 64 cycles out of reset in normal modes or at any time in special modes.
Table 4-5 RAM and Register Mapping
RAM[3:0]
Location
REG[3:0]
Location
0000
$0000≠$03FF
0000
$0000≠$005F
0001
$1000≠$13FF
0001
$1000≠$105F
0010
$2000≠$23FF
0010
$2000≠$205F
0011
$3000≠$33FF
0011
$3000≠$305F
0100
$4000≠$43FF
0100
$4000≠$405F
0101
$5000≠$53FF
0101
$5000≠$505F
0110
$6000≠$63FF
0110
$6000≠$605F
0111
$7000≠$73FF
0111
$7000≠$705F
1000
$8000≠$83FF
1000
$8000≠$805F
1001
$9000≠$93FF
1001
$9000≠$905F
1010
$A000≠$A3FF
1010
$A000≠$A05F
1011
$B000≠$B3FF
1011
$B000≠$B05F
1100
$C000≠$C3FF
1100
$C000≠$C05F
1101
$D000≠$D3FF
1101
$D000≠$D05F
1110
$E000≠$E3FF
1110
$E000≠$E05F
1111
$F000≠$F3FF
1111
$F000≠$F05F
OPTION -- System Configuration Options
$1039
Bit 7
6
5
4
3
2
1
Bit 0
ADPU
CSEL
IRQE*
DLY*
CME
FCME*
CR1*
CR0*
RESET:
0
0
0
0
0
0
0
0

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-12
TECHNICAL DATA
ADPU -- A/D Power-Up
Refer to SECTION 10 ANALOG-TO-DIGITAL CONVERTER.
0 = A/D system disabled
1 = A/D system power enabled
CSEL -- Clock Select
Selects alternate clock source for on-chip EEPROM and A/D charge pumps. On-chip
RC clock should be used when E clock falls below 1 MHz. Refer to SECTION 10 AN-
ALOG-TO-DIGITAL CONVERTER.
0 = A/D and EEPROM use system E clock
1 = A/D and EEPROM use internal RC clock
IRQE -- Configure IRQ for Falling Edge-Sensitive Operation
Refer to SECTION 5 RESETS AND INTERRUPTS.
0 = Low level-sensitive operation.
1 = Falling edge-sensitive only operation.
DLY -- Enable Oscillator Start-up Delay
Refer to SECTION 5 RESETS AND INTERRUPTS.
0 = The oscillator start-up delay coming out of STOP is bypassed and the MCU re-
sumes processing within about four bus cycles.
1 = A delay of approximately 4000 E-clock cycles is imposed as the MCU is started
up from the STOP power-saving mode.
CME -- Clock Monitor Enable
In order to use both STOP and clock monitor, the CME bit must be written to zero be-
fore executing STOP, then written to one after recovering from STOP. Refer to SEC-
TION 5 RESETS AND INTERRUPTS.
0 = Clock monitor disabled
1 = Clock monitor enabled
FCME -- Force Clock Monitor Enable
When FCME equals one, slow or stopped clocks will cause a clock failure reset. To
use STOP mode, FCME must always equal zero. Refer to SECTION 5 RESETS AND
INTERRUPTS.
0 = Clock monitor follows state of CME bit
1 = Clock monitor enabled and cannot be disabled until next reset
CR[1:0] -- COP Timer Rate Select Bits
These control bits determine a scaling factor for the watchdog timer. Refer to SEC-
TION 5 RESETS AND INTERRUPTS.
4.3.2.4 OPT2 Register
The system configuration options 2 register (OPT2) controls three additional system
options.

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-13
GWOM -- Port G Wired-OR Mode
Refer to SECTION 6 PARALLEL INPUT/OUTPUT.
0 = Port G operates normally.
1 = Port G outputs are open-drain type.
CWOM -- Port C Wired-OR Mode
Refer to SECTION 6 PARALLEL INPUT/OUTPUT.
0 = Port C operates normally.
1 = Port C outputs are open-drain type.
CLK4X -- 4XOUT Clock Enable
The 4XOUT signal, when enabled, is a buffered XTAL signal and is four times the fre-
quency of the E-clock. This buffered clock is intended to synchronize external devices
with the MCU. Refer to SECTION 2 PIN DESCRIPTIONS.
0 = The 4XOUT pin is driven low.
1 = The 4XOUT signal is driven on the 4XOUT pin.
Bits [4:0] -- Not implemented
Always read zero
4.3.2.5 Block Protect Register (BPROT)
BPROT prevents accidental writes to EEPROM and the CONFIG register. The bits in
this register can be written to zero during the first 64 E-clock cycles after reset in the
normal modes. Once the bits are cleared to zero, the EEPROM array and the CONFIG
register can be programmed or erased. Setting the bits in the BPROT register to logic
one protects the EEPROM and CONFIG register until the next reset. Refer to Table
4-6.
Bits [7:5] -- Not implemented
Always read zero
PTCON -- Protect for CONFIG
0 = CONFIG register can be programmed or erased normally
1 = CONFIG register cannot be programmed or erased
BPRT[3:0] -- Block Protect Bits for EEPROM
0 = Protection disabled for associated block
1 = Protection enabled for associated block
OPT2 -- System Configuration Options 2
$1038
Bit 7
6
5
4
3
2
1
Bit 0
GWOM
CWOM
CLK4X
--
--
--
--
--
RESET:
0
0
0
0
0
0
0
0
BPROT -- Block Protect
$1035
Bit 7
6
5
4
3
2
1
Bit 0
--
--
--
PTCON
BPRT3
BPRT2
BPRT1
BPRT0
RESET:
0
0
0
1
1
1
1
1

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-14
TECHNICAL DATA
4.4 EEPROM and CONFIG Register
The 512-byte EEPROM array and the single-byte CONFIG register are implemented
with the same type of memory cells. The CONFIG register is a separate address lo-
cated within the register block rather than in the EEPROM array. Unlike other registers
within the register block, the CONFIG register can only be altered using the EEPROM
programming procedure.
4.4.1 EEPROM
The 512-byte on-board EEPROM is initially located from $FE00 to $FFFF after reset
in single-chip modes. It can be mapped to any other 4-Kbyte boundary by program-
ming bits EE[3:0] in the CONFIG register. The EEPROM is enabled by the EEON bit
in the CONFIG register. Programming and erasing is controlled by the PPROG regis-
ter.
Unlike information stored in ROM, data in the 512 bytes of EEPROM can be erased
and reprogrammed under software control. Because programming and erasing oper-
ations use an on-chip charge pump, a separate external power supply is not required.
Use of the block protect register (BPROT) prevents inadvertent writes to (or erases of)
blocks of EEPROM. The CSEL bit in the OPTION register selects an on-chip oscillator
clock for programming and erasing while operating at frequencies below 1 MHz.
4.4.1.1 EEPROM Programming
An exact register access sequence must be followed to allow successful programming
and erasure of the EEPROM. The following procedures for modifying the EEPROM
and CONFIG register detail the sequence. If an attempt is made to set both EELAT
and EEPGM bits in the same write cycle and this attempt occurs before the required
write cycle with the EELAT bit set, then neither bit is set. If a write to an EEPROM ad-
dress is performed while the EEPGM bit is set, the write is ignored, and the program-
ming operation in progress is not disturbed. If no EEPROM address is written between
the point at which EELAT is set and EEPGM is set, then no program or erase operation
occurs. These safeguards are included to prevent accidental EEPROM changes in
cases of program runaway. If the frequency of the E clock is 1 MHz or less, the CSEL
bit in the OPTION register must be set to select the internal RC clock.
When the EELAT bit in the PPROG register is cleared, the EEPROM can be read as
if it were a ROM. The block protect register has no effect during reads. During EE-
PROM programming, the ROW and BYTE bits of PPROG are not used.
Table 4-6 EEPROM Block Protection
Bit Name
Block Protected
Block Size
BPRT0
$xE00≠$xE1F
32 Bytes
BPRT1
$xE20≠$xE5F
64 Bytes
BPRT2
$xE60≠$xEDF
128 Bytes
BPRT3
$xEE0≠$xFFF
288 Bytes

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-15
Recall that zeros must be erased by a separate erase operation before programming.
The following example of how to program an EEPROM byte assumes that the appro-
priate bits in BPROT have been cleared and the data to be programmed is present in
accumulator A.
4.4.1.2 EEPROM Bulk Erase
To erase the EEPROM, ensure that the proper bits of the BPROT register are cleared,
then complete the following steps using the PPROG register:
1. Write to PPROG with the ERASE, EELAT, and appropriate BYTE and ROW
bits set.
2. Write to the appropriate EEPROM address with any data. Row erase only re-
quires a write to any location in the row. Bulk erase is accomplished by writing
to any location in the array.
3. Write to PPROG with ERASE, EELAT, EEPGM, and the appropriate BYTE and
ROW bits set.
4. Delay for 10 ms or more, as appropriate.
5. Clear the EEPGM bit in PPROG to turn off the high voltage.
6. Return to step 1 for next byte or row or proceed to step 7.
7. Clear the PPROG register to reconfigure the EEPROM address and data buses
for normal operation.
The following is an example of how to bulk erase the 512-byte EEPROM. The CONFIG
register is not affected in this example. When bulk erasing the CONFIG register, CON-
FIG and the 512-byte array are all erased.
4.4.1.3 EEPROM Row Erase
The following example shows how to perform a fast erase of large sections of EE-
PROM and assumes that index register X contains the address of a location in the de-
sired row.
PROG
LDAB
#$02
EELAT=1, EEPGM=0
STAB
$103B
Set EELAT bit
STAA
$FE00
Store data to EEPROM address
LDAB
#$03
EELAT=1, EEPGM=1
STAB
$103B
Turn on programming voltage
JSR
DLY10
Delay 10 ms
CLR
$103B
Turn off high voltage and set to READ mode
BULKE
LDAB
#$06
ERASE=1, EELAT=1, EEPGM=0
STAB
$103B
Set EELAT bit
STAB
$FE00
Store any data to any EEPROM address
LDAB
#$07
EELAT=1, EEPGM=1
STAB
$103B
Turn on programming voltage
JSR
DLY10
Delay 10 ms
CLR
$103B
Turn off high voltage and set to READ mode

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-16
TECHNICAL DATA
4.4.1.4 EEPROM Byte Erase
The following is an example of how to erase a single byte of EEPROM and assumes
that index register X contains the address of the byte to be erased.
4.4.2 PPROG EEPROM Programming Control Register
Bits in PPROG register control parameters associated with EEPROM programming.
ODD -- Program Odd Rows in Half of EEPROM (TEST)
EVEN -- Program Even Rows in Half of EEPROM (TEST)
Bit 5 -- Not implemented
Always reads zero
BYTE -- Byte/Other EEPROM Erase Mode
0 = Row or bulk erase mode used
1 = Erase only one byte of EEPROM
ROW -- Row/All EEPROM Erase Mode (only valid when BYTE = 0)
0 = All 512 bytes of EEPROM erased
1 = Erase only one 16-byte row of EEPROM
ROWE
LDAB
#$0E
ROW=1, ERASE=1, EELAT=1, EEPGM=0
STAB
$103B
Set to ROW erase mode
STAB
0,X
Store any data to any address in ROW
LDAB
#$0F
ROW=1, ERASE=1, EELAT=1, EEPGM=1
STAB
$103B
Turn on high voltage
JSR
DLY10
Delay 10 ms
CLR
$103B
Turn off high voltage and set to READ mode
BYTEE
LDAB
#$16
BYTE=1, ROW=0, ERASE=1, EELAT=1, EEPGM=0
STAB
$103B
Set to BYTE erase mode
STAB
0,X
Store any data to address to be erased
LDAB
#$17
BYTE=1, ROW=0, ERASE=1, EELAT=1, EEPGM=1
STAB
$103B
Turn on high voltage
JSR
DLY10
Delay 10 ms
CLR
$103B
Turn off high voltage and set to READ mode
PPROG -- EEPROM Programming Control
$103B
Bit 7
6
5
4
3
2
1
Bit 0
ODD
EVEN
--
BYTE
ROW
ERASE
EELAT
EEPGM
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-17
ERASE -- Erase/Normal Control for EEPROM
Can be read or written any time.
0 = Normal read or program mode
1 = Erase mode
EELAT -- EEPROM Latch Control
Can be read or written any time. When EELAT equals one, writes to EEPROM cause
address and data to be latched.
0 = EEPROM address and data bus configured for normal reads
1 = EEPROM address and data bus configured for programming or erasing
EEPGM -- EEPROM Program Command
Can be read any time. Can only be written while EELAT = 1.
0 = Program or erase voltage switched off to EEPROM array
1 = Program or erase voltage switched on to EEPROM array
4.4.3 CONFIG Register Programming
Because the CONFIG register is implemented with EEPROM cells, use EEPROM pro-
cedures to erase and program this register. The procedure for programming is the
same as for programming a byte in the EEPROM array, except that the CONFIG reg-
ister address is used. CONFIG can be programmed or erased (including byte erase)
while the MCU is operating in any mode, provided that PTCON in BPROT is clear. To
change the value in the CONFIG register, complete the following procedure. Do not
initiate a reset until the procedure is complete. The new value will not take effect until
after the next reset sequence.
1. Erase the CONFIG register.
2. Program the new value to the CONFIG address.
3. Initiate reset.
P indicates a previously programmed bit. P(L) indicates that the bit resets to the logic
level held in the EEPROM bit prior to reset, but the function of COP is controlled by
DISR bit in TEST1 register.
Table 4-7 EEPROM Erase Mode Control
BYTE
ROW
Action
0
0
Bulk Erase (All 512 Bytes)
0
1
Row Erase (16 Bytes)
1
0
Byte Erase
1
1
Byte Erase
CONFIG -- System Configuration Register
$103F
Bit 7
6
5
4
3
2
1
Bit 0
EE3
EE2
EE1
EE0
--
NOCOP
--
EEON
RESET:
1
1
1
1
1
P
1
1
Single Chip
1
1
1
1
1
P(L)
1
1
Bootstrap
P
P
P
P
1
P
1
P
Expanded
P
P
P
P
1
P(L)
1
0
Special Test

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-18
TECHNICAL DATA
For a description of the bits contained in the CONFIG register refer to 4.3.2.1 CONFIG
Register.
4.5 Chip Selects
The function of the chip selects is to minimize the amount of external glue logic needed
to interface the MCU to external devices. The MC68HC11F1 has four software config-
ured chip selects that can be enabled in expanded modes. The chip selects for I/O
(CSIO1 and CSIO2) are used for I/O expansion. The program chip select (CSPROG)
is used with an external memory that contains the program code and reset vectors.
The general-purpose chip select (CSGEN) is the most flexible and is used to enable
external devices.
Such factors as polarity, block size, base address and clock stretching can be con-
trolled using the four chip-select control registers. When a port G pin is not used for
chip select functions it can be used for general-purpose I/O.
When enabled, a chip select signal is asserted whenever the CPU makes an access
to a designated range of addresses. Bus control signals and chip select signals are
synchronous with the external E clock signal. For more information refer to Table A≠
7. Expansion Bus Timing in APPENDIX A ELECTRICAL CHARACTERISTICS. The
length of the external E clock cycle to which the external device is synchronized can
be stretched to accommodate devices that are slower than the MCU.
4.5.1 Program Chip Select
The program chip select (CSPROG) is active in the range of memory where the main
program exists. Refer to Figure 4-3.
When enabled, the CSPROG is active during address valid time and is an active-low
signal. Although the general-purpose chip select has priority over the program chip se-
lect, CSPROG can be raised to a higher priority level by setting the GCSPR bit in
CSCTL register. Bits in CSCTL enable the program chip select and determine its ad-
dress range and priority level. Bits in CSSTRH select from zero to three clock cycles
of delay.
4.5.2 I/O Chip Selects
The I/O chip selects (CSIO1 and CSIO2) are fixed in size and fill the remainder of the
4-Kbyte block occupied by the register block. CSIO1 is mapped at $x060≠$x7FF and
CSIO2 is mapped at $x800≠$xFFF, where "x" corresponds to the high-order nibble of
the register block base address, represented by the value contained in REG[3:0] in the
INIT register.
Bits in the CSCTL register determine the polarity of the active state and enable both I/
O chip selects. Bits in CSGSIZ select whether each chip select is active for address-
valid or E-valid time. Bits in CSSTRH select from zero to three clock cycles of delay.
Refer to Figure 4-3.

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-19
Figure 4-3 Address Map for I/O and Program Chip Selects
4.5.3 General-Purpose Chip Select
The general-purpose chip select (CSGEN) is the most flexible and has the most con-
trol bits. Polarity of the active state, E-valid or address-valid timing, size, starting ad-
dress, and clock delay are all programmable.
A single bit in CSCTL selects a priority between CSGEN and CSPROG. Bits in CSG-
SIZ select between address valid or E-clock valid timing, determine the polarity of the
active state and the address range of CSGEN. The value contained in the CSGADR
register determines the starting address for CSGEN. Depending on the size selected
for CSGEN, some bits in CSGADR will be invalid (don't cares). Note that CSGEN is
disabled when a size of zero is selected. Refer to Figure 4-4.
$0000
$1000
$FFFF
EXPANDED
MODE
$FE00
FFC0
FFFF
VECTORS
0000
FFFF
E000
C000
8000
x000
x05F
96-BYTE REGISTER
BLOCK
x060
x7FF
I/O CHIP SELECT 1
(CSIO1)
x800
xFFF
I/O CHIP SELECT 2
(CSIO2)
REMAPPABLE TO
4-KBYTE BOUNDARY
$E000
$C000
$8000
PSIZ[A:B] = 0:0
64K
PSIZ[A:B] = 0:1
32K
PSIZ[A:B] = 1:0
16K
PSIZ[A:B] = 1:1
8K
PROGRAM CHIP SELECT
(CSPROG)

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-20
TECHNICAL DATA
Figure 4-4 Address Map for General-Purpose Chip Select
IO1SA≠IO1SB -- I/O Chip Select 1 Clock Stretch Select
Refer to Table 4-8.
IO2SA≠IO2SB -- I/O Chip Select 2 Clock Stretch Select
Refer to Table 4-8.
GSTHA≠GSTHB -- General-Purpose Chip Select Clock Stretch Select
Refer to Table 4-8.
PSTHA≠PSTHB -- Program Chip Select Clock Stretch Select
Refer to Table 4-8.
CSSTRH -- Chip Select Clock Stretch Select
$105C
Bit 7
6
5
4
3
2
1
Bit 0
IO1SA
IO1SB
IO2SA
IO2SB
GSTHA
GSTHB
PSTHA
PSTHB
RESET:
0
0
0
0
0
0
0
0
Table 4-8 Chip Select Clock Stretch Control
Bit A
Bit B
Clock Stretch Selected
0
0
None
0
1
1 cycle
1
0
2 cycles
1
1
3 cycles
$0000
$FFFF
EXP
MODE
ADDR
SPACE
N/A
GA15
GA[15:14]
GA[15:13]
GA[15:12]
GA[15:11]
GA[15:10]
0 : 1 : 1
1 : 0 : 0
1 : 0 : 1
1 : 1 : 0
0 : 0 : 0
0 : 0 : 1
0 : 1 : 0
VALID BASE ADDR BITS:
GSIZA : GSIZB : GSIZC:
SIZE:
8K
4K
2K
1K
64K
32K
16K
NOTE: These examples assume a starting address of $0000.
GA[15:10]
1 : 1 : 1
DISABLED

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-21
*PCSEN is set out of reset in expanded modes and cleared in single-chip modes.
IO1EN -- I/O Chip Select 1 Enable
0 = CSIO1 is disabled and port G bit 5 is general-purpose I/O.
1 = CSIO1 is enabled and uses port G bit 5.
IO1PL -- I/O Chip Select 1 Polarity Select
0 = CSIO1 active low
1 = CSIO1 active high
IO2EN -- I/O Chip Select 2 Enable
0 = CSIO2 is disabled and port G bit 4 is general-purpose I/O.
1 = CSIO2 is enabled and uses port G bit 4.
IO2PL -- I/O Chip Select 2 Polarity Select
0 = CSIO2 active low
1 = CSIO2 active high
GCSPR -- General-Purpose Chip Select Priority
0 = Program chip select has priority over general-purpose chip select
1 = General-purpose chip select has priority over program chip select
PCSEN -- Program Chip Select Enable
This bit is set out of reset in expanded modes and cleared in single-chip modes.
0 = CSPROG disabled and port G bit 7 available as general-purpose I/O
1 = CSPROG enabled out of reset and uses port G bit 7 pin
PSIZA, PSIZB -- Program Chip Select Size (A or B)
GA[15:10] -- General-Purpose Chip Select Base Address
GA[15:10] correspond to MCU address bits ADDR[15:10] and select the starting ad-
dress of the general-purpose chip select's address range. Which bits are valid de-
pends upon the size selected by GSIZA≠GSIZC in CSGSIZ register. Refer to the
following table and to Figure 4-4.
CSCTL -- Chip Select Control
$105D
Bit 7
6
5
4
3
2
1
Bit 0
IO1EN
IO1PL
IO2EN
IO2PL
GCSPR
PCSEN*
PSIZA
PSIZB
RESET:
0
0
0
0
0
--
0
0
Table 4-9 Program Chip Select Size Control
PSIZA
PSIZB
Size (Bytes)
Address Range
0
0
64 K
$0000≠$FFFF
0
1
32 K
$8000≠$FFFF
1
0
16 K
$C000≠$FFFF
1
1
8 K
$E000≠$FFFF
CSGADR -- General-Purpose Chip Select Address Register
$105E
Bit 7
6
5
4
3
2
1
Bit 0
GA15
GA14
GA13
GA12
GA11
GA10
--
--
RESET:
0
0
0
0
0
0
0
0

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-22
TECHNICAL DATA
IO1AV -- I/O Chip Select 1 Address Valid
0 = I/O chip select 1 is active during E-clock valid time (E-clock high)
1 = I/O chip select 1 is active during address valid time
IO2AV -- I/O Chip Select 2 Address Valid
0 = I/O chip select 1 is active during E-clock valid time (E-clock high)
1 = I/O chip select 1 is active during address valid time
GNPOL -- General-Purpose Chip Select Polarity Select
0 = CSGEN is active low
1 = CSGEN is active high
GAVLD -- General-Purpose Chip Select Address Valid Select
0 = CSGEN is valid during E-clock valid time (E-clock high)
1 = CSGEN is valid during address valid time
G1SZA≠G1SZC -- General-Purpose Chip Select Size
Refer to Table 4-11.
Table 4-10 General-Purpose Chip Select Starting Address
Size (Bytes)
Valid Starting Address
Bits
0 K (Disabled)
None
1 K
GA[15:10]
2 K
GA[15:11]
4 K
GA[15:12]
8 K
GA[15:13]
16 K
GA[15:14]
32 K
GA15
64 K
None
CSGSIZ -- General-Purpose Chip Select Size Control
$105F
Bit 7
6
5
4
3
2
1
Bit 0
IO1AV
IO2AV
--
GNPOL
GAVLD
GSIZA
GSIZB
GSIZC
RESET:
0
0
0
0
0
1
1
1
Table 4-11 General-Purpose Chip Select Size Control
GSIZA
GSIZB
GSIZC
Size (Bytes)
0
0
0
64 K
0
0
1
32 K
0
1
0
16 K
0
1
1
8 K
1
0
0
4 K
1
0
1
2 K
1
1
0
1 K
1
1
1
0 K (Disabled)

MC68HC11F1
OPERATING MODES AND ON-CHIP MEMORY
MOTOROLA
TECHNICAL DATA
4-23
Table 4-12 Chip Select Control Parameter Summary
CSIO1
Enable
IO1EN in CSCTL --
1 = On, off at reset (0)
Valid
IO1AV in CSGSIZ --
1 = Address valid, 0 = E valid
Polarity
IO1PL in CSCTL --
1 = Active high, 0 = Active low
Size
Fixed --
($x060≠$x7FF)
Start Address
$x060 --
"x" is determined by REG[3:0] in INIT
Stretch
IO1SA≠IO1SB in CSSTRH -- 0, 1, 2, or 3 E clocks
CSIO2
Enable
IO2EN in CSCTL --
1 = On, off at reset (0)
Valid
IO2AV in CSGSIZ --
1 = Address valid, 0 = E valid
Polarity
IO2PL in CSCTL --
1 = Active high, 0 = Active low
Size
Fixed --
($x800≠$xFFF)
Start Address
$x800 --
"x" is determined by REG[3:0] in INIT
Stretch
IO2SA≠IO2SB in CSSTRH -- 0, 1, 2, or 3 E clocks
CSPROG
Enable
PCSEN in CSCTL --
1 = On, on after reset in expanded modes
off after reset in single-chip modes
Valid
Fixed (Address valid)
Polarity
Fixed (Active low)
Size
PSIZA≠PSIZB --
0:0 = 64K ($0000≠$FFFF)
in CSCTL
0:1 = 32K ($8000≠$FFFF)
1:0 = 16K ($C000≠$FFFF)
1:1 = 8K ($E000≠$FFFF)
Start Address
Fixed (determined by size)
Stretch
PSTHA≠PSTHB in CSSTRH -- 0, 1, 2, or 3 E clocks
1 cycle after reset in expanded mode
no delay after reset in all other modes
Priority
GCSPR in CSCTL --
1 = CSGEN above CSPROG
0 = CSPROG above CSGEN
CSGEN
Enable
Set size to 0K to disable --
1 = CSGEN above CSPROG
0 = CSPROG above CSGEN
Valid
GAVLD in CSGSIZ --
Address valid or E valid
Polarity
GNPOL in CSGSIZ --
Active high or low
Size
GSIZA≠GSIZC in CSGSIZ -- Refer to Table 4≠12
Start Address
GA[15:10] in CSGADR
Stretch
GSTHA≠GSTHB in CSSTRH -- 0, 1, 2, or 3 E clocks

MOTOROLA
OPERATING MODES AND ON-CHIP MEMORY
MC68HC11F1
4-24
TECHNICAL DATA

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-1
SECTION 5 RESETS AND INTERRUPTS
Resets and interrupt operations load the program counter with a vector that points to
a new location from which instructions are to be fetched. A reset causes the internal
control registers to be initialized to a known state. The program counter is loaded with
a known starting address and execution of instructions begins. An interrupt temporarily
suspends normal program execution while an interrupt service routine is being execut-
ed. After an interrupt has been serviced, the main program resumes as if there had
been no interruption.
5.1 Resets
There are four possible sources of reset. Power-on reset (POR) and external reset
share the normal reset vector. The computer operating properly (COP) reset and the
clock monitor reset each has its own vector.
5.1.1 Power-On Reset
A positive transition on V
DD
generates a power-on reset (POR), which is used only for
power-up conditions. POR cannot be used to detect drops in power supply voltages.
A 4064 t
cyc
(internal clock cycle) delay after the oscillator becomes active allows the
clock generator to stabilize. If RESET is at logical zero at the end of 4064 t
cyc
, the CPU
remains in the reset condition until RESET goes to logical one.
It is important to protect the MCU during power transitions. To protect data in EE-
PROM, M68HC11 systems need an external circuit that holds the RESET pin low
whenever V
DD
is below the minimum operating level. This external voltage level de-
tector, or other external reset circuits, are the usual source of reset in a system. The
POR circuit only initializes internal circuitry during cold starts. Refer to Figure 2≠3.
5.1.2 External Reset (RESET)
The CPU distinguishes between internal and external reset conditions by sensing
whether the reset pin rises to a logic one in less than two E-clock cycles after an inter-
nal device releases reset. When a reset condition is sensed, the RESET pin is driven
low by an internal device for four E-clock cycles, then released. Two E-clock cycles
later it is sampled. If the pin is still held low, the CPU assumes that an external reset
has occurred. If the pin is high, it indicates that the reset was initiated internally by ei-
ther the COP system or the clock monitor. It is not advisable to connect an external
resistor capacitor (RC) power-up delay circuit to the reset pin of M68HC11 devices be-
cause the circuit charge time constant can cause the device to misinterpret the type of
reset that occurred.

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-2
TECHNICAL DATA
5.1.3 Computer Operating Properly (COP) Reset
The MCU includes a COP system to help protect against software failures. When the
COP is enabled, the software is responsible for keeping a free-running watchdog timer
from timing out. When the software is no longer being executed in the intended se-
quence, a system reset is initiated.
The state of the NOCOP bit in the CONFIG register determines whether the COP sys-
tem is enabled or disabled. To change the enable status of the COP system, change
the contents of the CONFIG register and then perform a system reset. In the special
test and bootstrap operating modes, the COP system is initially inhibited by the disable
resets (DISR) control bit in the TEST1 register. The DISR bit can subsequently be writ-
ten to zero to enable COP resets.
The COP timer rate control bits CR[1:0] in the OPTION register determine the COP
time-out period. The system E clock is divided by the values shown in Table 5-1. After
reset, these bits are zero, which selects the fastest time-out period. In normal operat-
ing modes, these bits can only be written once within 64 bus cycles after reset.
Complete the following reset sequence to service the COP timer. Write $55 to CO-
PRST to arm the COP timer clearing mechanism. Then write $AA to COPRST to clear
the COP timer. Performing instructions between these two steps is possible as long
as both steps are completed in the correct sequence before the timer times out.
5.1.4 Clock Monitor Reset
The clock monitor circuit is based on an internal RC time delay. If no MCU clock edges
are detected within this RC time delay, the clock monitor can optionally generate a sys-
tem reset. The clock monitor function is enabled or disabled by the CME and FCME
control bits in the OPTION register. The presence of a time-out is determined by the
RC delay, which allows the clock monitor to operate without any MCU clocks.
Clock monitor is used as a backup for the COP system. Because the COP needs a
clock to function, it is disabled when the clocks stop. Therefore, the clock monitor sys-
tem can detect clock failures not detected by the COP system.
Table 5-1 COP Timer Rate Selection
CR[1:0]
Divide
E By
XTAL = 8.0 MHz Time-
out
≠0 ms, +16.4 ms
XTAL = 12.0 MHz
Time-out
≠0 ms, +10.9 ms
XTAL = 16.0 MHz
Time-out
≠0 ms, +8.2 ms
0 0
2
15
16.384 ms
10.923 ms
8.192 ms
0 1
2
17
65.536 ms
43.691 ms
32.768 ms
1 0
2
19
262.14 ms
174.76 ms
131.07 ms
1 1
2
21
1.049 s
699.05 ms
524.29 ms
E =
2.0 MHz
3.0 MHz
4.0 MHz
COPRST -- Arm/Reset COP Timer Circuitry
$103A
Bit 7
6
5
4
3
2
1
Bit 0
7
6
5
4
3
2
1
0
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-3
Semiconductor wafer processing causes variations of the RC time-out values between
individual devices. An E-clock frequency below 10 kHz is detected as a clock monitor
error. An E-clock frequency of 200 kHz or more prevents clock monitor errors. Using
the clock monitor function when the E-clock is below 200 kHz is not recommended.
Special considerations are needed when a STOP instruction is executed and the clock
monitor is enabled. Because the STOP function causes the clocks to be halted, the
clock monitor function generates a reset sequence if it is enabled at the time the STOP
mode was initiated. Before executing a STOP instruction, clear to zero the CME bit in
the OPTION register to disable the clock monitor. After recovery from STOP, set the
CME bit to logic one to enable the clock monitor.
5.1.5 OPTION Register
*Can be written only once in first 64 cycles out of reset in normal modes, or at any time in special modes.
ADPU -- Analog-to-Digital Converter Power-Up
Refer to SECTION 10 ANALOG-TO-DIGITAL CONVERTER.
CSEL -- Clock Select
Refer to SECTION 10 ANALOG-TO-DIGITAL CONVERTER.
IRQE -- Configure IRQ for Edge-Sensitive Only Operation
0 = Low level sensitive operation.
1 = Falling edge sensitive only operation.
DLY -- Enable Oscillator Start-up Delay
0 = The oscillator start-up delay coming out of STOP is bypassed and the MCU re-
sumes processing within about four bus cycles.
1 = A delay of approximately 4000 E-clock cycles is imposed as the MCU is started
up from the STOP power-saving mode.
CME -- Clock Monitor Enable
This control bit can be read or written at any time and controls whether or not the in-
ternal clock monitor circuit triggers a reset sequence when the system clock is slow or
absent. When it is clear, the clock monitor circuit is disabled, and when it is set, the
clock monitor circuit is enabled. Reset clears the CME bit.
FCME -- Force Clock Monitor Enable
To use STOP mode, the FCME bit must equal zero.
0 = Clock monitor follows the state of the CME bit.
1 = Clock monitor circuit is enabled until next reset
OPTION -- System Configuration Options
$1039
Bit 7
6
5
4
3
2
1
Bit 0
ADPU
CSEL
IRQE*
DLY*
CME
FCME*
CR1*
CR0*
RESET:
0
0
0
1
0
0
0
0

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-4
TECHNICAL DATA
CR[1:0] -- COP Timer Rate Select
The internal E clock is first divided by 2
15
before it enters the COP watchdog system.
These control bits determine a scaling factor for the watchdog timer. Refer to Table 5-
1.
5.1.6 CONFIG Register
P indicates a previously programmed bit. P(L) indicates that the bit resets to the logic
level held in the latch prior to reset, but the function of COP is controlled by DISR in
TEST1 register.
EE[3:0] -- EEPROM Mapping Control
Refer to SECTION 4 OPERATING MODES AND ON-CHIP MEMORY.
Bit 3 -- Not implemented
Always reads one
NOCOP -- COP System Disable
0 = COP system enabled (forces reset on time-out)
1 = COP system disabled
Bit 1 -- Not implemented
Always reads one
EEON -- EEPROM Enable
Refer to SECTION 4 OPERATING MODES AND ON-CHIP MEMORY.
5.2 Effects of Reset
When a reset condition is recognized, the internal registers and control bits are forced
to an initial state. Depending on the cause of the reset and the operating mode, the
reset vector can be fetched from any of six possible locations. Refer to Table 5-2.
These initial states then control on-chip peripheral systems to force them to known
start-up states, as follows:
CONFIG -- System Configuration Register
$103F
Bit 7
6
5
4
3
2
1
Bit 0
EE3
EE2
EE1
EE0
--
NOCOP
--
EEON
RESET:
1
1
1
1
1
P
1
1
Single Chip
1
1
1
1
1
P(L)
1
1
Bootstrap
P
P
P
P
1
P
1
P
Expanded
P
P
P
P
1
P(L)
1
0
Special Test
Table 5-2 Reset Cause, Operating Mode, and Reset Vector
Cause of Reset
Normal Mode Vector
Special Test or Bootstrap
POR or RESET Pin
$FFFE, FFFF
$BFFE, $BFFF
Clock Monitor Failure
$FFFC, FFFD
$BFFC, $BFFD
COP Watchdog Time-out
$FFFA, FFFB
$BFFA, $BFFB

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-5
5.2.1 Central Processing Unit
After reset, the CPU fetches the reset vector from the appropriate address during the
first three cycles, and begins executing instructions. The stack pointer and other CPU
registers are indeterminate immediately after reset; however, the X and I interrupt
mask bits in the condition code register (CCR) are set to mask any interrupt requests.
Also, the S bit in the CCR is set to inhibit the STOP mode.
5.2.2 Memory Map
After reset, the INIT register is initialized to $01, putting the 1024 bytes of RAM at lo-
cations $0000 through $03FF, and the control registers at locations $1000 through
$105F. The EE[3:0] bits in the CONFIG register control the location of the 512-byte
EEPROM array.
5.2.3 Parallel I/O
When a reset occurs in expanded operating modes, port B, C, and F pins used for par-
allel I/O are dedicated to the expansion bus. If a reset occurs during a single-chip op-
erating mode, all ports are configured as general-purpose high-impedance inputs.
NOTE
Do not confuse pin function with the electrical state of the pin at reset.
All general-purpose I/O pins configured as inputs at reset are in a
high-impedance state. Port data registers reflect the port's functional
state at reset. The pin function is mode dependent.
5.2.4 Timer
During reset, the timer system is initialized to a count of $0000. The prescaler bits are
cleared, and all output compare registers are initialized to $FFFF. All input capture reg-
isters are indeterminate after reset. The output compare 1 mask (OC1M) register is
cleared so that successful OC1 compares do not affect any I/O pins. The other four
output compares are configured so that they do not affect any I/O pins on successful
compares. All input capture edge-detector circuits are configured for capture disabled
operation. The timer overflow interrupt flag and all eight timer function interrupt flags
are cleared. All nine timer interrupts are disabled because their mask bits have been
cleared.
The I4/O5 bit in the PACTL register is cleared to configure the I4/O5 function as OC5;
however, the OM5≠OL5 control bits in the TCTL1 register are clear so OC5 does not
control the PA3 pin.
5.2.5 Real-Time Interrupt (RTI)
The real-time interrupt flag (RTIF) is cleared and automatic hardware interrupts are
masked. The rate control bits are cleared after reset and can be initialized by software
before the real-time interrupt (RTI) system is used.

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-6
TECHNICAL DATA
5.2.6 Pulse Accumulator
The pulse accumulator system is disabled at reset so that the pulse accumulator input
(PAI) pin defaults to being a general-purpose input pin.
5.2.7 Computer Operating Properly (COP)
The COP watchdog system is enabled if the NOCOP control bit in the CONFIG regis-
ter is cleared, and disabled if NOCOP is set. The COP rate is set for the shortest du-
ration time-out.
5.2.8 Serial Communications Interface (SCI)
The reset condition of the SCI system is independent of the operating mode. All trans-
mit and receive interrupts are masked and both the transmitter and receiver are dis-
abled so the port pins default to being general-purpose I/O lines. The SCI frame format
is initialized to an 8-bit character size. The send break and receiver wakeup functions
are disabled. The TDRE and TC status bits in the SCI status register are both set, in-
dicating that there is no transmit data in either the transmit data register or the transmit
serial shift register. The RDRF, IDLE, OR, NF, FE, PF, and RAF receive-related status
bits are cleared.
5.2.9 Serial Peripheral Interface (SPI)
The SPI system is disabled by reset. The port pins associated with this function default
to being general-purpose I/O lines.
5.2.10 Analog-to-Digital Converter
The A/D converter configuration is indeterminate after reset. The ADPU bit is cleared
by reset, which disables the A/D system. The conversion complete flag is cleared by
reset.
5.2.11 System
The EEPROM programming controls are disabled, so the memory system is config-
ured for normal read operation. PSEL[3:0] are initialized with the binary value %0101,
causing the external IRQ pin to have the highest I-bit interrupt priority. The IRQ pin is
configured for level-sensitive operation (for wired-OR systems). The RBOOT, SMOD,
and MDA bits in the HPRIO register reflect the status of the MODB and MODA inputs
at the rising edge of reset. The DLY control bit is set to specify that an oscillator start-
up delay is imposed upon recovery from STOP mode. The clock monitor system is dis-
abled because CME and FCME are cleared.
5.3 Reset and Interrupt Priority
Resets and interrupts have a hardware priority that determines which reset or interrupt
is serviced first when simultaneous requests occur. Any maskable interrupt can be giv-
en priority over other maskable interrupts.
The first six interrupt sources are not maskable. The priority arrangement for these
sources is as follows:

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-7
1. POR or RESET pin
2. Clock monitor reset
3. COP watchdog reset
4. XIRQ interrupt
5. Illegal opcode interrupt
6. Software interrupt (SWI)
The maskable interrupt sources have the following priority arrangement:
1. IRQ
2. Real-time interrupt
3. Timer input capture 1
4. Timer input capture 2
5. Timer input capture 3
6. Timer output compare 1
7. Timer output compare 2
8. Timer output compare 3
9. Timer output compare 4
10. Timer input capture 4/output compare 5
11. Timer overflow
12. Pulse accumulator overflow
13. Pulse accumulator input edge
14. SPI transfer complete
15. SCI system (refer to Figure 5-5)
Any one of these interrupts can be assigned the highest maskable interrupt priority by
writing the appropriate value to the PSEL bits in the HPRIO register. Otherwise, the
priority arrangement remains the same. An interrupt that is assigned highest priority is
still subject to global masking by the I bit in the CCR, or by any associated local bits.
Interrupt vectors are not affected by priority assignment. To avoid race conditions, HP-
RIO can only be written while I-bit interrupts are inhibited.
5.3.1 Highest Priority Interrupt and Miscellaneous Register
*The values of the RBOOT, SMOD, MDA, and IRV reset bits depend on the operating mode selected during power-
up. Refer to Table 4≠3.
RBOOT -- Read Bootstrap ROM
Set to one out of reset in bootstrap mode. Valid while in special modes only. Can be
read any time. Can only be written in special modes. Refer to SECTION 4 OPERAT-
ING MODES AND ON-CHIP MEMORY for more information.
HPRIO -- Highest Priority I-Bit Interrupt and Miscellaneous
$103C
Bit 7
6
5
4
3
2
1
Bit 0
RBOOT*
SMOD*
MDA*
IRV
PSEL3
PSEL2
PSEL1
PSEL0
RESET:
0 0 0
0
0
1
0
1
Single Chip
0
0
1
1
0
1
0
1
Expanded
1
1
0
0
0
1
0
1
Bootstrap
0
1
1
1
0
1
0
1
Special Test

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-8
TECHNICAL DATA
SMOD -- Special Mode Select
Can be read any time. Can only be written in special modes (SMOD = 1). Can only be
written to zero. Refer to SECTION 4 OPERATING MODES AND ON-CHIP MEMORY
for more information.
MDA -- Mode Select A
Can be read any time. Can only be written in special modes (SMOD = 1). Refer to
SECTION 4 OPERATING MODES AND ON-CHIP MEMORY for more information.
IRV -- Internal Read Visibility
The IRV control bit allows internal read accesses to be available on the external data
bus during operation in expanded modes. In special modes (SMOD = 1), IRV resets
to one (enabled) and can be written any time. In normal modes (SMOD = 0), IRV re-
sets to zero (disabled) and only one write is allowed.
PSEL[3:0] -- Priority Select Bits
These bits select one interrupt source to be elevated above all other I-bit-related
sources and can only be written while the I bit in the CCR is set (interrupts disabled).
5.4 Interrupts
The MCU has 18 interrupt vectors that support 22 interrupt sources. The 15 maskable
interrupts are generated by on-chip peripheral systems. These interrupts are recog-
nized when the global interrupt mask bit (I) in the condition code register (CCR) is
clear. The three non-maskable interrupt sources are illegal opcode trap, software in-
terrupt, and XIRQ pin. Refer to Table 5-4, which shows the interrupt sources and vec-
tor assignments for each source.
Table 5-3 Highest Priority Interrupt Selection
PSEL3
PSEL2
PSEL1
PSEL0
Interrupt Source Promoted
0
0
0
0
Timer Overflow
0
0
0
1
Pulse Accumulator Overflow
0
0
1
0
Pulse Accumulator Input Edge
0
0
1
1
SPI Serial Transfer Complete
0
1
0
0
SCI Serial System
0
1
0
1
Reserved (Default to IRQ)
0
1
1
0
IRQ
0
1
1
1
Real-Time Interrupt
1
0
0
0
Timer Input Capture 1
1
0
0
1
Timer Input Capture 2
1
0
1
0
Timer Input Capture 3
1
0
1
1
Timer Output Compare 1
1
1
0
0
Timer Output Compare 2
1
1
0
1
Timer Output Compare 3
1
1
1
0
Timer Output Compare 4
1
1
1
1
Timer Output Compare 5/Input Capture 4

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-9
For some interrupt sources, such as the SCI interrupts, the flags are automatically
cleared during the normal course of responding to the interrupt requests. For example,
the RDRF flag in the SCI system is cleared by the automatic clearing mechanism con-
sisting of a read of the SCI status register while RDRF is set, followed by a read of the
SCI data register. The normal response to an RDRF interrupt request would be to read
the SCI status register to check for receive errors, then to read the received data from
the SCI data register. These two steps satisfy the automatic clearing mechanism with-
out requiring any special instructions.
5.4.1 Interrupt Recognition and Register Stacking
An interrupt can be recognized at any time after it is enabled by its local mask, if any,
and by the global mask bit in the CCR. Once an interrupt source is recognized, the
CPU responds at the completion of the instruction being executed. Interrupt latency
varies according to the number of cycles required to complete the current instruction.
When the CPU begins to service an interrupt, the contents of the CPU registers are
pushed onto the stack in the order shown in Table 5-5. After the CCR value is stacked,
the I bit and the X bit (if XIRQ is pending) are set to inhibit further interrupts. The inter-
rupt vector for the highest priority pending source is fetched, and execution continues
Table 5-4 Interrupt and Reset Vector Assignments
Vector Address
Interrupt Source
CCR
Mask Bit
Local Mask
FFC0, C1 ≠ FFD4, D5
Reserved
--
--
FFD6, D7
SCI Serial System
I
∑ SCI Receive Data Register Full
RIE
∑ SCI Receiver Overrun
RIE
∑ SCI Transmit Data Register Empty
TIE
∑ SCI Transmit Complete
TCIE
∑ SCI Idle Line Detect
ILIE
FFD8, D9
SPI Serial Transfer Complete
I
SPIE
FFDA, DB
Pulse Accumulator Input Edge
I
PAII
FFDC, DD
Pulse Accumulator Overflow
I
PAOVI
FFDE, DF
Timer Overflow
I
TOI
FFE0, E1
Timer Input Capture 4/Output Compare 5
I
I4/O5I
FFE2, E3
Timer Output Compare 4
I
OC4I
FFE4, E5
Timer Output Compare 3
I
OC3I
FFE6, E7
Timer Output Compare 2
I
OC2I
FFE8, E9
Timer Output Compare 1
I
OC1I
FFEA, EB
Timer Input Capture 3
I
IC3I
FFEC, ED
Timer Input Capture 2
I
IC2I
FFEE, EF
Timer Input Capture 1
I
IC1I
FFF0, F1
Real-Time Interrupt
I
RTII
FFF2, F3
IRQ I
None
FFF4, F5
XIRQ Pin
X
None
FFF6, F7
Software Interrupt
None
None
FFF8, F9
Illegal Opcode Trap
None
None
FFFA, FB
COP Failure
None
NOCOP
FFFC, FD
Clock Monitor Fail
None
CME
FFFE, FF
RESET
None
None

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-10
TECHNICAL DATA
at the address specified by the vector. At the end of the interrupt service routine, the
return from interrupt instruction is executed and the saved registers are pulled from the
stack in reverse order so that normal program execution can resume. Refer to SEC-
TION 3 CENTRAL PROCESSING UNIT for further information.
5.4.2 Non-Maskable Interrupt Request (XIRQ)
Non-maskable interrupts are useful because they can always interrupt CPU opera-
tions. The most common use for such an interrupt is for serious system problems, such
as program runaway or power failure. The XIRQ input is an updated version of the NMI
input of earlier MCUs.
Upon reset, both the X bit and I bit of the CCR are set to inhibit all maskable interrupts
and XIRQ. After minimum system initialization, software can clear the X bit by a TAP
instruction, enabling XIRQ interrupts. Thereafter, software cannot set the X bit. Thus,
an XIRQ interrupt is a nonmaskable interrupt. Because the operation of the I-bit-relat-
ed interrupt structure has no effect on the X bit, the internal XIRQ pin remains non-
masked. In the interrupt priority logic, the XIRQ interrupt has a higher priority than any
source that is maskable by the I bit. All I-bit-related interrupts operate normally with
their own priority relationship.
When an I-bit-related interrupt occurs, the I bit is automatically set by hardware after
stacking the CCR byte. The X bit is not affected. When an X-bit-related interrupt oc-
curs, both the X and I bits are automatically set by hardware after stacking the CCR.
A return from interrupt instruction restores the X and I bits to their pre-interrupt request
state.
5.4.3 Illegal Opcode Trap
Because not all possible opcodes or opcode sequences are defined, the MCU in-
cludes an illegal opcode detection circuit, which generates an interrupt request. When
an illegal opcode is detected and the interrupt is recognized, the current value of the
program counter is stacked. After interrupt service is complete, reinitialize the stack
pointer so repeated execution of illegal opcodes does not cause stack underflow. Left
uninitialized, the illegal opcode vector can point to a memory location that contains an
illegal opcode. This condition causes an infinite loop that causes stack underflow. The
stack grows until the system crashes.
Table 5-5 Stacking Order on Entry to Interrupts
Memory Location
CPU Registers
SP
PCL
SP ≠ 1
PCH
SP ≠ 2
IYL
SP ≠ 3
IYH
SP ≠ 4
IXL
SP ≠ 5
IXH
SP ≠ 6
ACCA
SP ≠ 7
ACCB
SP ≠ 8
CCR

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-11
The illegal opcode trap mechanism works for all unimplemented opcodes on all four
opcode map pages. The address stacked as the return address for the illegal opcode
interrupt is the address of the first byte of the illegal opcode. Otherwise, it would be
almost impossible to determine whether the illegal opcode had been one or two bytes.
The stacked return address can be used as a pointer to the illegal opcode so the illegal
opcode service routine can evaluate the offending opcode.
5.4.4 Software Interrupt
SWI is an instruction, and thus cannot be interrupted until complete. SWI is not inhib-
ited by the global mask bits in the CCR. Because execution of SWI sets the I mask bit,
once an SWI interrupt begins, other interrupts are inhibited until SWI is complete, or
until user software clears the I bit in the CCR.
5.4.5 Maskable Interrupts
The maskable interrupt structure of the MCU can be extended to include additional ex-
ternal interrupt sources through the IRQ pin. The default configuration of this pin is a
low-level sensitive wired-OR network. When an event triggers an interrupt, a software
accessible interrupt flag is set. When enabled, this flag causes a constant request for
interrupt service. After the flag is cleared, the service request is released.
5.4.6 Reset and Interrupt Processing
Figure 5-1 and Figure 5-3 illustrate the reset and interrupt process. Figure 5-1 illus-
trates how the CPU begins from a reset and how interrupt detection relates to normal
opcode fetches. Figure 5-3 is an expansion of a block in Figure 5-1 and illustrates in-
terrupt priorities. Figure 5-5 shows the resolution of interrupt sources within the SCI
subsystem.

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-12
TECHNICAL DATA
Figure 5-1 Processing Flow Out of Reset (1 of 2)
COP WATCHDOG TIMEOUT
X BIT IN
CCR SET
?
1B
1A
HIGHEST
LOWEST
POWER-ON RESET
(POR)
EXTERNAL RESET
CLOCK MONITOR FAIL
(WITH CME = 1)
(WITH NOCOP = 0)
LOAD PROGRAM COUNTER
WITH CONTENTS OF
$FFFA, FFFB (VECTOR FETCH)
DELAY 4064 E CYCLES
SET S, X, AND I BITS
IN CCR
RESET MCU
HARDWARE
BEGIN AN INSTRUCTION
SEQUENCE
STACK CPU
REGISTERS
SET X AND I BITS
FETCH VECTOR
$FFE4, FFE5
YES
YES
NO
LOAD PROGRAM COUNTER
WITH CONTENTS OF
$FFFC, FFFD (VECTOR FETCH)
LOAD PROGRAM COUNTER
WITH CONTENTS OF
$FFFE, FFFF (VECTOR FETCH)
PRIORITY
XIRQ
PIN LOW
?
NO

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-13
Figure 5-2 Processing Flow Out of Reset (2 of 2)
ANY I BIT
INTERRUPT
PENDING
?
STACK CPU
REGISTERS
SET X AND I BITS
FETCH VECTOR
$FFE6, FFE7
YES
1A
1B
YES
NO
STACK CPU
REGISTERS
SET X AND I BITS
FETCH VECTOR
$FFE8, FFE9
FETCH OPCODE
STACK CPU
REGISTERS
STACK CPU
REGISTERS
SET I BIT
EXECUTE THIS
INSTRUCTION
RESTORE CPU
REGISTERS
FROM STACK
RESOLVE INTERRUPT
PRIORITY AND FETCH
VECTOR FOR HIGHEST
PENDING SOURCE
(REFER TO FIGURE 5-2)
START NEXT
INSTRUCTION
SEQUENCE
YES
YES
YES
YES
YES
NO
I BIT IN
CCR SET
?
NO
ILLEGAL
OPCODE
?
NO
WAI
?
NO
SWI
?
NO
RTI
?
NO
INTERRUPT
YET
?

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-14
TECHNICAL DATA
Figure 5-3 Interrupt Priority Resolution (1 of 2)
2A
2B
YES
NO
FETCH VECTOR
$FFF4, FFF5
YES
NO
XIRQ PIN
LOW
?
YES
NO
YES
NO
IRQ
?
FETCH VECTOR
$FFF2, FFF3
YES
NO
RTII = 1
?
FETCH VECTOR
$FFF0, FFF1
YES
NO
REAL-TIME
INTERRUPT
?
YES
NO
IC1I = 1
?
FETCH VECTOR
$FFEE, FFEF
YES
NO
TIMER
IC1F
?
YES
NO
IC2I = 1
?
FETCH VECTOR
$FFEC, FFED
YES
NO
YES
NO
IC3I = 1
?
FETCH VECTOR
$FFEA, FFEB
YES
NO
YES
NO
OC1I = 1
?
FETCH VECTOR
$FFE8, FFE9
YES
NO
TIMER
OC1F
?
BEGIN
SET X BIT IN CCR
FETCH VECTOR
TIMER
IC3F
?
TIMER
IC2F
?
X BIT
IN CCR SET
?
PRIORITY
INTERRUPT
?
HIGHEST

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-15
Figure 5-4 Interrupt Priority Resolution (2 of 2)
2A
2B
END
YES
NO
OC2I = 1
?
FETCH VECTOR
$FFE6, FFE7
YES
NO
TIMER
OC2F
?
YES
NO
OC3I = 1
?
FETCH VECTOR
$FFE4, FFE5
YES
NO
TIMER
OC3F
?
YES
NO
OC4I = 1
?
FETCH VECTOR
$FFE2, FFE3
YES
NO
TIMER
OC4F
?
YES
NO
OC5/IC4I = 1
?
FETCH VECTOR
$FFE0, FFE1
YES
NO
TIMER
OC5/IC4F
?
YES
NO
TOI = 1
?
FETCH VECTOR
$FFDE, FFDF
YES
NO
TIMER
TOF
?
YES
NO
PAOVI = 1
?
FETCH VECTOR
$FFDC, FFDD
YES
NO
YES
NO
PAII = 1
?
FETCH VECTOR
$FFDA, FFDB
YES
NO
ACCUMULATOR
PAIF
?
YES
NO
SPIE = 1
?
FETCH VECTOR
$FFD8, FFD9
YES
NO
SPIF
OR MODF
?
YES
NO
FETCH VECTOR
$FFD6, FFD7
FETCH VECTOR
$FFF2, FFF3
SCI
(REFER TO FIG 5-3)
?
SPURIOUS INTERRUPT ≠ TAKE IRQ VECTOR
PULSE
ACCUMULATOR
PAOVF
?
PULSE

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-16
TECHNICAL DATA
Figure 5-5 Interrupt Source Resolution Within SCI
5.5 Low Power Operation
Both STOP and WAIT suspend CPU operation until a reset or interrupt occurs. The
WAIT condition suspends processing and reduces power consumption to an interme-
diate level. The STOP condition turns off all on-chip clocks and reduces power con-
sumption to an absolute minimum while retaining the contents of all 1024 bytes of
RAM.
YES
NO
RDRF = 1
?
NO ≠ VALID SCI
REQUEST
BEGIN
YES
NO
YES
NO
OR = 1
?
RIE = 1
?
YES
NO
RE = 1
?
YES
NO
YES
NO
TDRE = 1
?
TIE = 1
?
YES
NO
TE = 1
?
YES
NO
YES
NO
TC = 1
?
TCIE = 1
?
YES
NO
YES
NO
IDLE = 1
?
ILIE = 1
?
YES
NO
RE = 1
?
YES ≠ VALID SCI
REQUEST

MC68HC11F1
RESETS AND INTERRUPTS
MOTOROLA
TECHNICAL DATA
5-17
5.5.1 WAIT
The WAI opcode places the MCU in the WAIT condition, during which the CPU regis-
ters are stacked and CPU processing is suspended until a qualified interrupt is detect-
ed. The interrupt can be an external IRQ, an XIRQ, or any of the internally generated
interrupts, such as the timer or serial interrupts. The on-chip crystal oscillator remains
active throughout the WAIT standby period.
The reduction of power in the WAIT condition depends on how many internal clock sig-
nals driving on-chip peripheral functions can be shut down. The CPU is always shut
down during WAIT. While in the wait state, the address/data bus repeatedly runs read
cycles to the address where the CCR contents were stacked. Ensuring that the stack
contents are placed in internal RAM will further reduce power consumption. The MCU
leaves the wait state when it senses any interrupt that has not been masked.
The free-running timer system is shut down only if the I bit is set to one and the COP
system is disabled by NOCOP being set to one. Several other systems can also be in
a reduced power consumption state depending on the state of software-controlled
configuration control bits. Power consumption by the analog-to-digital (A/D) converter
is not affected significantly by the WAIT condition. However, the A/D converter current
can be eliminated by writing the ADPU bit to zero. The SPI system is enabled or dis-
abled by the SPE control bit. The SCI transmitter is enabled or disabled by the TE bit,
and the SCI receiver is enabled or disabled by the RE bit. Therefore the power con-
sumption in WAIT is dependent on the particular application.
5.5.2 STOP
Executing the STOP instruction while the S bit in the CCR is equal to zero places the
MCU in the STOP condition. If the S bit is not zero, the STOP opcode is treated as a
no-op (NOP). The STOP condition offers minimum power consumption because all
clocks, including the crystal oscillator, are stopped while in this mode. To exit STOP
and resume normal processing, a logic low level must be applied to one of the external
interrupts (IRQ or XIRQ) or to the RESET pin. A pending edge-triggered IRQ can also
bring the CPU out of STOP.
Because all clocks are stopped in this mode, all internal peripheral functions also stop.
The data in the internal RAM is retained as long as V
DD
power is maintained. The CPU
state and I/O pin levels are static and are unchanged by STOP. Therefore, when an
interrupt restarts the system, the MCU resumes processing as if there were no inter-
ruption. If reset is used to restart the system a normal reset sequence results where
all I/O pins and functions are also restored to their initial states.
To use the IRQ pin as a means of recovering from STOP, the I bit in the CCR must be
clear (IRQ not masked). The XIRQ pin can be used to wake up the MCU from STOP
regardless of the state of the X bit in the CCR, although the recovery sequence de-
pends on the state of the X bit. If X is set to zero (XIRQ not masked), the MCU starts
up, beginning with the stacking sequence leading to normal service of the XIRQ re-
quest. If X is set to one (XIRQ masked or inhibited), then processing continues with
the instruction that immediately follows the STOP instruction, and no XIRQ interrupt
service is requested or pending.

MOTOROLA
RESETS AND INTERRUPTS
MC68HC11F1
5-18
TECHNICAL DATA
Because the oscillator is stopped in STOP mode, a restart delay may be imposed to
allow oscillator stabilization upon leaving STOP. If the internal oscillator is being used,
this delay is required; however, if a stable external oscillator is being used, the DLY
control bit can be used to bypass this start-up delay. The DLY control bit is set by reset
and can be optionally cleared during initialization. If the DLY equal to zero option is
used to avoid start-up delay on recovery from STOP, then reset should not be used as
the means of recovering from STOP, as this causes DLY to be set again by reset, im-
posing the restart delay. This same delay also applies to power-on reset, regardless
of the state of the DLY control bit, but does not apply to a reset while the clocks are
running.

MC68HC11F1
PARALLEL INPUT/OUTPUT
MOTOROLA
TECHNICAL DATA
6-1
SECTION 6 PARALLEL INPUT/OUTPUT
The MC68HC11F1 MCU has up to 54 input/output lines, depending on the operating
mode. The data bus of this microcontroller is nonmultiplexed. I/O lines are organized
into seven parallel ports. Ports with bidirectional pins have an associated data direc-
tion control register. This register (DDRx) contains a data direction control bit for each
bidirectional port line. The following table is a summary of the configuration and fea-
tures of each port.
Port pin function is mode dependent. Do not confuse pin function with the electrical
state of the pin at reset. Port pins are either driven to a specified logic level or are con-
figured as high impedance inputs. I/O pins configured as high-impedance inputs have
port data that is indeterminate. The contents of the corresponding latches are depen-
dent upon the electrical state of the pins during reset. In port descriptions, an "I" indi-
cates this condition. Port pins that are driven to a known logic level during reset are
shown with a value of either one or zero. Some control bits are unaffected by reset.
Reset states for these bits are indicated with a "U".
6.1 Port A
Port A has eight bidirectional I/O pins and shares functions with the timer system.
Table 6-1 I/O Port Configuration
Port
Input Pins
Output Pins
Bidirectional Pins
Shared Functions
Port A
--
--
8
Timer
Port B
--
8
--
High-Order Address
Port C
--
--
8
Data Bus
Port D
--
--
6
SCI and SPI
Port E
8
--
--
A/D Converter
Port F
--
8
--
Low-Order Address
Port G
--
--
8
Chip Select Outputs
PORTA -- Port A Data
$1000
Bit 7
6
5
4
3
2
1
Bit 0
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
RESET:
I
I
I
I
I
I
I
I
Alt. Pin
Func.:
PAI
OC2
OC3
OC4
IC4/OC5
IC1
IC2
IC3
And/or:
OC1
OC1
OC1
OC1
OC1
--
--
--

MOTOROLA
PARALLEL INPUT/OUTPUT
MC68HC11F1
6-2
TECHNICAL DATA
DDA[7:0] -- Data Direction for Port A
0 = Input
1 = Output
NOTE
To enable PA3 as fourth input capture, set the I4/O5 bit in the PACTL
register. Otherwise, PA3 is configured as a fifth output compare out
of reset, with bit I4/O5 being cleared. If the DDA3 bit is set (configur-
ing PA3 as an output), and IC4 is enabled, writes to PA3 cause edges
on the pin to result in input captures. Writing to TI4/O5 has no effect
when the TI4/O5 register is acting as IC4. PA7 drives the pulse ac-
cumulator input but also can be configured for general-purpose I/O,
or output compare. Note that even when PA7 is configured as an out-
put, the pin still drives the pulse accumulator input.
6.2 Port B
Reset state is mode dependent. In single-chip or bootstrap modes, port B pins are
general-purpose outputs. In expanded and test modes, port B pins are high-order ad-
dress outputs and PORTB is not in the memory map.
6.3 Port C
Reset state is mode dependent. In single-chip and bootstrap modes, port C pins are
high-impedance inputs. It is customary to have an external pull-up resistor on lines that
are driven by open-drain devices. In expanded or test modes, port C pins are data bus
inputs/outputs and PORTC is not in the memory map. The R/W signal is used to con-
trol the direction of data transfers.
The CWOM control bit in the OPT2 register disables port C's P-channel output drivers.
Because the N-channel driver is not affected by CWOM, setting CWOM causes port
C to become an open-drain-type output port suitable for wired-OR operation. In wired-
OR mode, (PORTC bits are at logic level zero), pins are actively driven low by the N-
channel driver. When a port C bit is at logic level one, the associated pin is in a high-
DDRA -- Data Direction Register for Port A
$1001
Bit 7
6
5
4
3
2
1
Bit 0
DDA7
DDA6
DDA5
DDA4
DDA3
DDA2
DDA1
DDA0
RESET:
0
0
0
0
0
0
0
0
PORTB -- Port B Data
$1004
Bit 7
6
5
4
3
2
1
Bit 0
PB7
PB6
PB5
PB4
PB3
PB2
PB1
PB0
S. Chip or
Boot:
PB7
PB6
PB5
PB4
PB3
PB2
PB1
PB0
RESET:
0
0
0
0
0
0
0
0
Expan. or
Test:
ADDR15
ADDR14
ADDR13
ADDR12
ADDR11
ADDR10
ADDR9
ADDR8

MC68HC11F1
PARALLEL INPUT/OUTPUT
MOTOROLA
TECHNICAL DATA
6-3
impedance state, as neither the N-channel nor the P-channel devices are active. It is
customary to have an external pull-up resistor on lines that are driven by open-drain
devices. Port C can only be configured for wired-OR operation when the MCU is in sin-
gle-chip or bootstrap modes.
DDC[7:0] -- Data Direction for Port C
0 = Input
1 = Output
6.4 Port D
In all modes, port D bits [5:0] can be used either for general-purpose I/O, or with the
SCI and SPI subsystems. During reset, port D pins are configured as high impedance
inputs (DDRD bits cleared).
The DWOM control bit in the SPCR register disables port D's P-channel output drivers.
Because the N-channel driver is not affected by DWOM, setting DWOM causes port
D to become an open-drain-type output port suitable for wired-OR operation. In wired-
OR mode, (PORTD bits are at logic level zero), pins are actively driven low by the N-
channel driver. When a port D bit is at logic level one, the associated pin is in a high-
impedance state, as neither the N-channel nor the P-channel devices are active. It is
customary to have an external pull-up resistor on lines that are driven by open-drain
devices. Port D can be configured for wired-OR operation in any operating mode.
PORTC -- Port C Data
$1006
Bit 7
6
5
4
3
2
1
Bit 0
PC7
PC6
PC5
PC4
PC3
PC2
PC1
PC0
S. Chip or
Boot:
PC7
PC6
PC5
PC4
PC3
PC2
PC1
PC0
RESET:
I
I
I
I
I
I
I
I
Expan. or
Test:
DATA7
DATA6
DATA5
DATA4
DATA3
DATA2
DATA1
DATA0
DDRC -- Data Direction Register for Port C
$1007
Bit 7
6
5
4
3
2
1
Bit 0
DDC7
DDC6
DDC5
DDC4
DDC3
DDC2
DDC1
DDC0
RESET:
0
0
0
0
0
0
0
0
PORTD -- Port D Data
$1008
Bit 7
6
5
4
3
2
1
Bit 0
--
--
PD5
PD4
PD3
PD2
PD1
PD0
RESET:
0
0
I
I
I
I
I
I
Alt. Pin
Func.:
--
--
SS SCK
MOSI
MISO
TxD
RxD
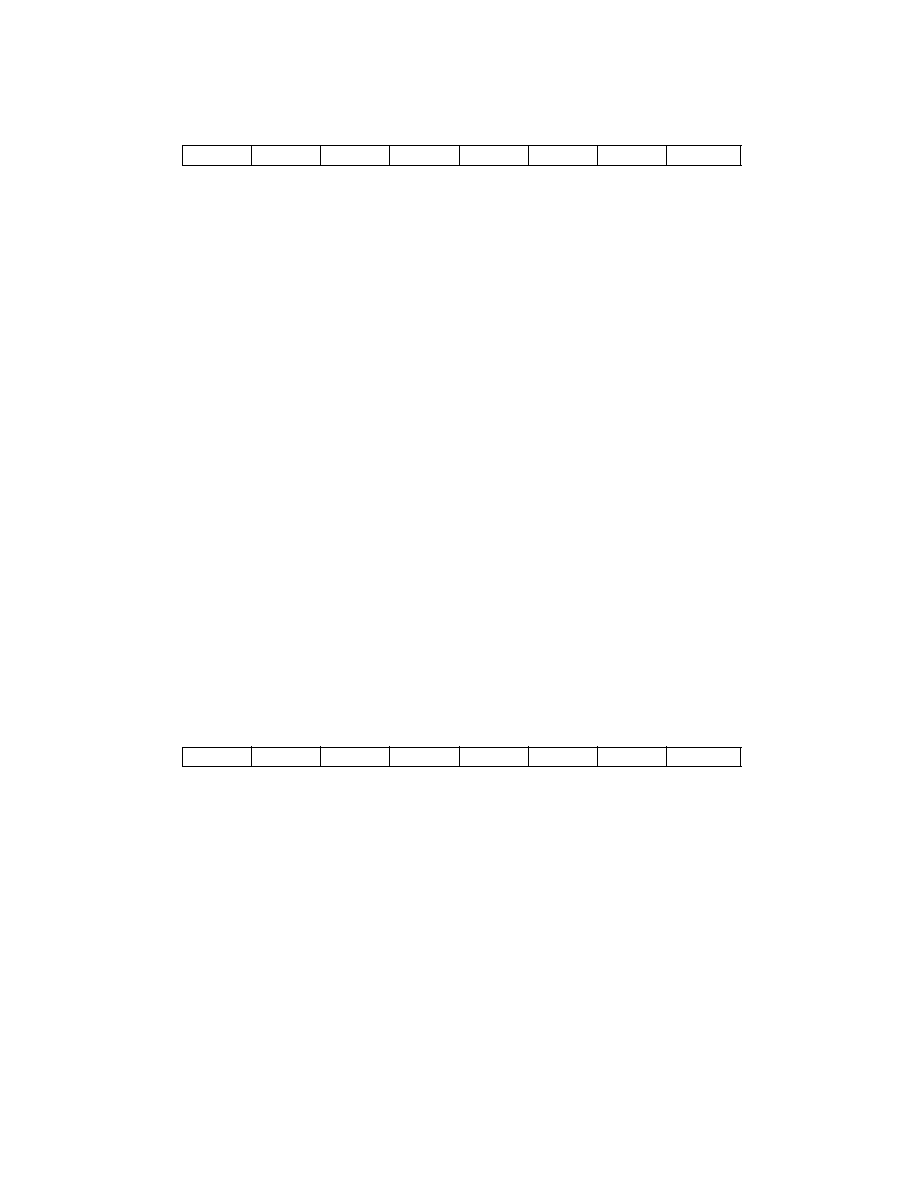
MOTOROLA
PARALLEL INPUT/OUTPUT
MC68HC11F1
6-4
TECHNICAL DATA
Bits [7:6] -- Not implemented
Always read zero
DDD[5:0] -- Data Direction for Port D
0 = Input
1 = Output
NOTE
When the SPI system is in slave mode, DDD5 has no meaning nor
effect. When the SPI system is in master mode, DDD5 determines
whether bit 5 of PORTD is an error detect input (DDD5 = 0) or a gen-
eral-purpose output (DDD5 = 1). If the SPI system is enabled and ex-
pects any of bits [4:2] to be an input, that bit will be an input
regardless of the state of the associated DDR bit. If any of bits [4:2]
are expected to be outputs that bit will be an output only if the asso-
ciated DDR bit is set.
6.5 Port E
Port E has eight general-purpose input pins and shares functions with the A/D convert-
er system. When some port E pins are being used for general-purpose input and oth-
ers are being used as A/D inputs, PORTE should not be read during the sample
portion of an A/D conversion.
6.6 Port F
Reset state is mode dependent. In single-chip or bootstrap modes, port F pins are gen-
eral-purpose outputs. In expanded and test modes, port F pins are low order address
outputs and PORTF is not in the memory map.
DDRD -- Data Direction Register for Port D
$1009
Bit 7
6
5
4
3
2
1
Bit 0
--
--
DDD5
DDD4
DDD3
DDD2
DDD1
DDD0
RESET:
0
0
0
0
0
0
0
0
PORTE -- Port E Data
$100A
Bit 7
6
5
4
3
2
1
Bit 0
PE7
PE6
PE5
PE4
PE3
PE2
PE1
PE0
RESET:
I
I
I
I
I
I
I
I
Alt. Pin
Func.:
AN7
AN6
AN5
AN4
AN3
AN2
AN1
AN0

MC68HC11F1
PARALLEL INPUT/OUTPUT
MOTOROLA
TECHNICAL DATA
6-5
6.7 Port G
Port G pins reset to high-impedance inputs except in expanded modes where reset
causes PG7 to become the CSPROG output. Alternate functions for port G bits [7:4]
are chip select outputs. All port G bits are bidirectional and have corresponding data
direction bits.
The GWOM control bit in the OPT2 register disables port G's P-channel output drivers.
Because the N-channel driver is not affected by GWOM, setting GWOM causes port
G to become an open-drain-type output port suitable for wired-OR operation. In wired-
OR mode, (PORTG bits are at logic level zero), pins are actively driven low by the N-
channel driver. When a port G bit is at logic level one, the associated pin is in a high-
impedance state, as neither the N-channel nor the P-channel devices are active. It is
customary to have an external pull-up resistor on lines that are driven by open-drain
devices. Port G can be configured for wired-OR operation in any operating mode.
DDG[7:0] -- Data Direction for Port G
0 = Input
1 = Output
6.8 System Configuration Options 2
The system configuration options 2 register controls several configuration parameters.
Bit 6, CWOM, is the only bit in this register that directly affects parallel I/O.
PORTF -- Port F Data
$1005
Bit 7
6
5
4
3
2
1
Bit 0
PF7
PF6
PF5
PF4
PF3
PF2
PF1
PF0
S. Chip
or Boot:
PF7
PF6
PF5
PF4
PF3
PF2
PF1
PF0
RESET:
0
0
0
0
0
0
0
0
Expan.
or Test:
ADDR7
ADDR6
ADDR5
ADDR4
ADDR3
ADDR2
ADDR1
ADDR0
PORTG -- Port G Data
$1002
Bit 7
6
5
4
3
2
1
Bit 0
PG7
PG6
PG5
PG4
PG3
PG2
PG1
PG0
RESET:
I
I
I
I
I
I
I
I
Alt. Pin
Func.: CSPROG
CSGEN
CSIO1
CSIO2
--
--
--
--
DDRG -- Data Direction Register for Port G
$1003
Bit 7
6
5
4
3
2
1
Bit 0
DDG7
DDG6
DDG5
DDG4
DDG3
DDG2
DDG1
DDG0
RESET:
0
0
0
0
0
0
0
0

MOTOROLA
PARALLEL INPUT/OUTPUT
MC68HC11F1
6-6
TECHNICAL DATA
GWOM -- Port G Wired-OR Mode
0 = Port G operates normally
1 = Port G outputs are open drain
CWOM -- Port C Wired-OR Mode
0 = Port C operates normally
1 = Port C outputs are open drain
CLK4X -- 4XOUT Clock Enable
Refer to SECTION 2 PIN DESCRIPTIONS.
Bits [4:0] -- Not implemented
Always read zero
OPT2 -- System Configuration Options 2
$1038
Bit 7
6
5
4
3
2
1
Bit 0
GWOM
CWOM
CLK4X
--
--
--
--
--
RESET:
0
0
1
0
0
0
0
0

MC68HC11F1
SERIAL COMMUNICATIONS INTERFACE
MOTOROLA
TECHNICAL DATA
7-1
SECTION 7 SERIAL COMMUNICATIONS INTERFACE
The serial communications interface (SCI) is a universal asynchronous receiver trans-
mitter (UART), one of two independent serial I/O subsystems in the MC68HC11F1
MCU. It has a standard nonreturn to zero (NRZ) format (one start bit, eight or nine data
bits, and one stop bit). Several baud rates are available. The SCI transmitter and re-
ceiver are independent, but use the same data format and bit rate.
7.1 Data Format
The serial data format requires the following conditions:
1. An idle-line in the high state before transmission or reception of a message.
2. A start bit, logic zero, transmitted or received, that indicates the start of each
character.
3. Data that is transmitted and received least significant bit (LSB) first.
4. A stop bit, logic one, used to indicate the end of a frame. (A frame consists of a
start bit, a character of eight or nine data bits, and a stop bit.)
5. A break (defined as the transmission or reception of a logic zero for some mul-
tiple number of frames).
Selection of the word length is controlled by the M bit of SCI control register SCCR1.
7.2 Transmit Operation
The SCI transmitter includes a parallel transmit data register (SCDR) and a serial shift
register. The contents of the serial shift register can only be written through the SCDR.
This double buffered operation allows a character to be shifted out serially while an-
other character is waiting in the SCDR to be transferred into the serial shift register.
The output of the serial shift register is applied to TxD as long as transmission is in
progress or the transmit enable (TE) bit of serial communication control register 2
(SCCR2) is set. The block diagram, Figure 7-1, shows the transmit serial shift register
and the buffer logic at the top of the figure.

MOTOROLA
SERIAL COMMUNICATIONS INTERFACE
MC68HC11F1
7-2
TECHNICAL DATA
Figure 7-1 SCI Transmitter Block Diagram
7.3 Receive Operation
During receive operations, the transmit sequence is reversed. The serial shift register
receives data and transfers it to a parallel receive data register (SCDR) as a complete
word. This double buffered operation allows a character to be shifted in serially while
another character is already in the SCDR. An advanced data recovery scheme distin-
guishes valid data from noise in the serial data stream. The data input is selectively
sampled to detect receive data, and a majority voting circuit determines the value and
integrity of each bit.
FE
NF
OR
IDLE
RDRF
TC
TDRE
SCSR INTERRUPT STATUS
SBK
RWU
RE
TE
ILIE
RIE
TCIE
TIE
SCCR2 SCI CONTROL 2
TRANSMITTER
CONTROL LOGIC
TCIE
TC
TIE
TDRE
SCI Rx
REQUESTS
SCI INTERRUPT
REQUEST
INTERNAL
DATA BUS
PIN BUFFER
AND CONTROL
H (8) 7
6
5
4
3
2
1
0
L
10 (11) - BIT Tx SHIFT REGISTER
PD1/
TxD
SCDR Tx BUFFER
TRANSFER Tx BUFFER
SHIFT ENABLE
JAM ENABLE
PREAMBLE--JAM 1's
BREAK--JAM 0's
(WRITE-ONLY)
FORCE PIN
DIRECTION (OUT)
SIZE 8/9
WAKE
M
T8
R8
SCCR1 SCI CONTROL 1
TRANSMITTER
BAUD RATE
CLOCK
DDD1
8
8
8
8

MC68HC11F1
SERIAL COMMUNICATIONS INTERFACE
MOTOROLA
TECHNICAL DATA
7-3
Figure 7-2 SCI Receiver Block Diagram
FE
NF
OR
IDLE
RDRF
TC
TDRE
SCSR1 SCI STATUS 1
SBK
RWU
RE
TE
ILIE
RIE
TCIE
TIE
SCCR2 SCI CONTROL 2
WAKE
M
T8
R8
WAKE-UP
LOGIC
RIE
OR
ILIE
IDLE
SCI Tx
REQUESTS
SCI INTERRUPT
REQUEST
INTERNAL
DATA BUS
PD0/
RxD
SCDR Rx BUFFER
STOP
(8) 7
6
5
4
3
2
1
0
10 (11) - BIT
Rx SHIFT REGISTER
(READ-ONLY)
SCCR1 SCI CONTROL 1
RIE
RDRF
START
MSB
ALL ONES
DATA
RECOVERY
˜
16
RWU
RE
M
DISABLE
DRIVER
RECEIVER
BAUD RATE
CLOCK
8
8
8
PIN BUFFER
AND CONTROL
DDD0

MOTOROLA
SERIAL COMMUNICATIONS INTERFACE
MC68HC11F1
7-4
TECHNICAL DATA
7.4 Wakeup Feature
The wakeup feature reduces SCI service overhead in multiple receiver systems. Soft-
ware for each receiver evaluates the first character of each message. The receiver is
placed in wakeup mode by writing a one to the RWU bit in the SCCR2 register. While
RWU is one, all of the receiver-related status flags (RDRF, IDLE, OR, NF, and FE) are
inhibited (cannot become set). Although RWU can be cleared by a software write to
SCCR2, to do so would be unusual. Normally RWU is set by software and is cleared
automatically with hardware. Whenever a new message begins, logic alerts the sleep-
ing receivers to wake up and evaluate the initial character of the new message.
Two methods of wakeup are available: idle-line wakeup and address-mark wakeup.
During idle-line wakeup, a sleeping receiver awakens as soon as the RxD line be-
comes idle. In the address-mark wakeup, logic one in the most significant bit (MSB) of
a character wakes up all sleeping receivers.
7.4.1 Idle-Line Wakeup
To use the receiver wakeup method, establish a software addressing scheme to allow
the transmitting devices to direct a message to individual receivers or to groups of re-
ceivers. This addressing scheme can take any form as long as all transmitting and re-
ceiving devices are programmed to understand the same scheme. Because the
addressing information is usually the first frame(s) in a message, receivers that are not
part of the current task do not become burdened with the entire set of addressing
frames. All receivers are awake (RWU = 0) when each message begins. As soon as
a receiver determines that the message is not intended for it, software sets the RWU
bit (RWU = 1), which inhibits further flag setting until the RxD line goes idle at the end
of the message. As soon as an idle line is detected by receiver logic, hardware auto-
matically clears the RWU bit so that the first frame of the next message can be re-
ceived. This type of receiver wakeup requires a minimum of one idle-line frame time
between messages, and no idle time between frames in a message.
7.4.2 Address-Mark Wakeup
The serial characters in this type of wakeup consist of seven (eight if M = 1) information
bits and an MSB, which indicates an address character (when set to one, or mark).
The first character of each message is an addressing character (MSB = 1). All receiv-
ers in the system evaluate this character to determine if the remainder of the message
is directed toward this particular receiver. As soon as a receiver determines that a
message is not intended for it, the receiver activates the RWU function by using a soft-
ware write to set the RWU bit. Because setting RWU inhibits receiver-related flags,
there is no further software overhead for the rest of this message.
When the next message begins, its first character has its MSB set, which automatically
clears the RWU bit and enables normal character reception. The first character whose
MSB is set is also the first character to be received after wakeup because RWU gets
cleared before the stop bit for that frame is serially received. This type of wakeup al-
lows messages to include gaps of idle time, unlike the idle-line method, but there is a
loss of efficiency because of the extra bit time for each character (address bit) required
for all characters.

MC68HC11F1
SERIAL COMMUNICATIONS INTERFACE
MOTOROLA
TECHNICAL DATA
7-5
7.5 SCI Error Detection
Three error conditions, SCDR overrun, received bit noise, and framing can occur dur-
ing generation of SCI system interrupts. Three bits (OR, NF, and FE) in the serial com-
munications status register (SCSR) indicate if one of these error conditions exists.
The overrun error (OR) bit is set when the next byte is ready to be transferred from the
receive shift register to the SCDR and the SCDR is already full (RDRF bit is set). When
an overrun error occurs, the data that caused the overrun is lost and the data that was
already in SCDR is not disturbed. The OR is cleared when the SCSR is read (with OR
set), followed by a read of the SCDR.
The noise flag (NF) bit is set if there is noise on any of the received bits, including the
start and stop bits. The NF bit is not set until the RDRF flag is set. The NF bit is cleared
when the SCSR is read (with FE equal to one) followed by a read of the SCDR.
When no stop bit is detected in the received data character, the framing error (FE) bit
is set. FE is set at the same time as the RDRF. If the byte received causes both fram-
ing and overrun errors, the processor only recognizes the overrun error. The framing
error flag inhibits further transfer of data into the SCDR until it is cleared. The FE bit is
cleared when the SCSR is read (with FE equal to one) followed by a read of the SCDR.
7.6 SCI Registers
There are five addressable registers associated with the SCI. SCCR1, SCCR2, and
BAUD are control registers. SCDR is the SCI data register and SCSR is the SCI status
register. Refer to the BAUD register description as well as the block diagram for the
baud rate generator.
7.6.1 Serial Communications Data Register
SCDR is a parallel register that performs two functions. It is the receive data register
when it is read, and the transmit data register when it is written. Reads access the re-
ceive data buffer and writes access the transmit data buffer. Receive and transmit are
double buffered.
7.6.2 Serial Communications Control Register 1
The SCCR1 register provides the control bits that determine word length and select
the method used for the wakeup feature.
SCDR -- SCI Data Register
$102F
Bit 7
6
5
4
3
2
1
Bit 0
R7/T7
R6/T6
R5/T5
R4/T4
R3/T3
R2/T2
R1/T1
R0/T0
RESET:
I
I
I
I
I
I
I
I
SCCR1 -- SCI Control Register 1
$102C
Bit 7
6
5
4
3
2
1
Bit 0
R8
T8
--
M
WAKE
--
--
--
RESET:
I
I
0
0
0
0
0
0

MOTOROLA
SERIAL COMMUNICATIONS INTERFACE
MC68HC11F1
7-6
TECHNICAL DATA
R8 -- Receive Data Bit 8
If M bit is set, R8 stores the ninth bit in the receive data character.
T8 -- Transmit Data Bit 8
If M bit is set, T8 stores the ninth bit in the transmit data character.
M -- Mode (Select Character Format)
0 = Start bit, 8 data bits, 1 stop bit
1 = Start bit, 9 data bits, 1 stop bit
WAKE -- Wakeup by Address Mark/Idle
0 = Wakeup by IDLE line recognition
1 = Wakeup by address mark (most significant data bit set)
7.6.3 Serial Communications Control Register 2
The SCCR2 register provides the control bits that enable or disable individual SCI
functions.
TIE -- Transmit Interrupt Enable
0 = TDRE interrupts disabled
1 = SCI interrupt requested when TDRE status flag is set
TCIE -- Transmit Complete Interrupt Enable
0 = TC interrupts disabled
1 = SCI interrupt requested when TC status flag is set
RIE -- Receiver Interrupt Enable
0 = RDRF and OR interrupts disabled
1 = SCI interrupt requested when RDRF flag or the OR status flag is set
ILIE -- Idle-Line Interrupt Enable
0 = IDLE interrupts disabled
1 = SCI interrupt requested when IDLE status flag is set
TE -- Transmitter Enable
When TE goes from zero to one, one unit of idle character time (logic one) is queued
as a preamble.
0 = Transmitter disabled
1 = Transmitter enabled
RE -- Receiver Enable
0 = Receiver disabled
1 = Receiver enabled
SCCR2 -- SCI Control Register 2
$102D
Bit 7
6
5
4
3
2
1
Bit 0
TIE
TCIE
RIE
ILIE
TE
RE
RWU
SBK
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
SERIAL COMMUNICATIONS INTERFACE
MOTOROLA
TECHNICAL DATA
7-7
RWU -- Receiver Wakeup Control
0 = Normal SCI receiver
1 = Wakeup enabled and receiver interrupts inhibited
SBK -- Send Break
At least one character time of break is queued and sent each time SBK is written to
one. As long as the SBK bit is set, break characters are queued and sent. More than
one break may be sent if the transmitter is idle at the time the SBK bit is toggled on
and off, as the baud rate clock edge could occur between writing the one and writing
the zero to SBK.
0 = Break generator off
1 = Break codes generated
7.6.4 Serial Communication Status Register
The SCSR provides inputs to the interrupt logic circuits for generation of the SCI sys-
tem interrupt.
TDRE -- Transmit Data Register Empty Flag
This flag is set when SCDR is empty. Clear the TDRE flag by reading SCSR and then
writing to SCDR.
0 = SCDR busy
1 = SCDR empty
TC -- Transmit Complete Flag
This flag is set when the transmitter is idle (no data, preamble, or break transmission
in progress). Clear the TC flag by reading SCSR and then writing to SCDR.
0 = Transmitter busy
1 = Transmitter idle
RDRF -- Receive Data Register Full Flag
This flag is set if a received character is ready to be read from SCDR. Clear the RDRF
flag by reading SCSR and then reading SCDR.
0 = SCDR empty
1 = SCDR full
IDLE -- Idle Line Detected Flag
This flag is set if the RxD line is idle. Once cleared, IDLE is not set again until the RxD
line has been active and becomes idle again. The IDLE flag is inhibited when RWU =
1. Clear IDLE by reading SCSR and then reading SCDR.
0 = RxD line is active
1 = RxD line is idle
SCSR -- SCI Status Register
$102E
Bit 7
6
5
4
3
2
1
Bit 0
TDRE
TC
RDRF
IDLE
OR
NF
FE
--
RESET:
1
1
0
0
0
0
0
0

MOTOROLA
SERIAL COMMUNICATIONS INTERFACE
MC68HC11F1
7-8
TECHNICAL DATA
OR -- Overrun Error Flag
OR is set if a new character is received before a previously received character is read
from SCDR. Clear the OR flag by reading SCSR and then reading SCDR.
0 = No overrun
1 = Overrun detected
NF -- Noise Error Flag
NF is set if majority sample logic detects anything other than a unanimous decision.
Clear NF by reading SCSR and then reading SCDR.
0 = Unanimous decision
1 = Noise detected
FE -- Framing Error
FE is set when a zero is detected where a stop bit was expected. Clear the FE flag by
reading SCSR and then reading SCDR.
0 = Stop bit detected
1 = Zero detected
Bit 0 -- Not implemented
Always reads zero
7.6.5 Baud Rate Register
Use this register to select different baud rates for the SCI system. The SCP[1:0] bits
select the prescaler rate for the SCR[2:0] bits. Together, these five bits provide multi-
ple baud rate combinations for a given crystal frequency. Normally, this register is writ-
ten once during initialization. The prescaler is set to its fastest rate by default out of
reset, and can be changed at any time. Refer to Table 7-1 and Table 7-2 for normal
baud rate selections.
TCLR -- Clear Baud Rate Counters (Test)
SCP[1:0] -- SCI Baud Rate Prescaler Selects
Refer to the SCI baud rate generator block diagram.
BAUD -- Baud Rate
$102B
Bit 7
6
5
4
3
2
1
Bit 0
TCLR
--
SCP1
SCP0
RCKB
SCR2
SCR1
SCR0
RESET:
0
0
0
0
0
U
U
U
Table 7-1 Baud Rate Prescaler Selection
Prescaler
Divide Internal
Crystal Frequency (MHz)
SCP1
SCP0
Clock By
4.0
4.9152
8.0
12.0
16.0
20.0
0
0
1
62500
76800
125000
187500
25000
312500
0
1
3
20833
25600
41667
62500
83332
104165
1
0
4
15625
19200
31250
46875
62500
78125
1
1
13
4800
5907
9600 14423
19200
24000

MC68HC11F1
SERIAL COMMUNICATIONS INTERFACE
MOTOROLA
TECHNICAL DATA
7-9
RCKB -- SCI Baud Rate Clock Check (Test)
SCR[2:0] -- SCI Baud Rate Selects
Selects receiver and transmitter bit rate based on output from baud rate prescaler
stage. Refer to the SCI baud rate generator block diagram.
The prescaler bits, SCP[2:0], determine the highest baud rate, and the SCR[2:0] bits
select an additional binary submultiple (
1
,
2,
4
,
through
128) of this highest baud
rate. The result of these two dividers in series is the 16X receiver baud rate clock. The
SCR[2:0] bits are not affected by reset and can be changed at any time, although they
should not be changed when any SCI transfer is in progress.
Figure 7-3 and Figure 7-4 illustrate the SCI baud rate timing chain. The prescaler se-
lect bits determine the highest baud rate. The rate select bits determine additional di-
vide by two stages to arrive at the receiver timing (RT) clock rate. The baud rate clock
is the result of dividing the RT clock by 16.
Table 7-2 Baud Rate Selection
Divide
Prescaler
Highest Baud Rate
(Prescaler Output from Previous Table)
SCR[2:0]
By
4800
19200
76800
312500
0 0 0
1
4800
19200
76800
312500
0 0 1
2
2400
9600
38400
156250
0 1 0
4
1200
4800
19200
78125
0 1 1
8
600
2400
9600
39063
1 0 0
16
300
1200
4800
19531
1 0 1
32
150
600
2400
9766
1 1 0
64
75
300
1200
4883
1 1 1
128
--
150
600
2441

MOTOROLA
SERIAL COMMUNICATIONS INTERFACE
MC68HC11F1
7-10
TECHNICAL DATA
Figure 7-3 SCI Baud Rate Generator Block Diagram
7.7 Status Flags and Interrupts
The SCI transmitter has two status flags. These status flags can be read by software
(polled) to tell when the corresponding condition exists. Alternatively, a local interrupt
enable bit can be set to enable each of these status conditions to generate interrupt
requests when the corresponding condition is present. Status flags are automatically
set by hardware logic conditions, but must be cleared by software, which provides an
interlock mechanism that enables logic to know when software has noticed the status
indication. The software clearing sequence for these flags is automatic -- functions
that are normally performed in response to the status flags also satisfy the conditions
of the clearing sequence.
OSCILLATOR
AND
CLOCK GENERATOR
(
˜
4)
XTAL
EXTAL
E
AS
SCP1:SCP0
SCI
RECEIVE
BAUD RATE
(16X)
SCI
TRANSMIT
BAUD RATE
(1X)
SCR2:SCR1:SCR0
˜
2
˜
2
˜
2
˜
2
˜
2
˜
2
0:0:1
0:1:0
0:1:1
1:0:0
1:0:1
1:1:0
1:1:1
0:0:0
˜
2
˜
16
˜
3
˜
4
˜
13
0:0
0:1
1:0
1:1
INTERNAL
BUS
CLOCK
(PH2)

MC68HC11F1
SERIAL COMMUNICATIONS INTERFACE
MOTOROLA
TECHNICAL DATA
7-11
TDRE and TC flags are normally set when the transmitter is first enabled (TE set to
one). The TDRE flag indicates there is room in the transmit queue to store another
data character in the TDR. The TIE bit is the local interrupt mask for TDRE. When TIE
is zero, TDRE must be polled. When TIE and TDRE are one, an interrupt is requested.
The TC flag indicates the transmitter has completed the queue. The TCIE bit is the lo-
cal interrupt mask for TC. When TCIE is zero, TC must be polled; when TCIE is one
and TC is one, an interrupt is requested.
Writing a zero to TE requests that the transmitter stop when it can. The transmitter
completes any transmission in progress before actually shutting down. Only an MCU
reset can cause the transmitter to stop and shut down immediately. If TE is written to
zero when the transmitter is already idle, the pin reverts to its general-purpose I/O
function (synchronized to the bit-rate clock). If anything is being transmitted when TE
is written to zero, that character is completed before the pin reverts to general-purpose
I/O, but any other characters waiting in the transmit queue are lost. The TC and TDRE
flags are set at the completion of this last character, even though TE has been dis-
abled.
7.7.1 Receiver Flags
The SCI receiver has five status flags, three of which can generate interrupt requests.
The status flags are set by the SCI logic in response to specific conditions in the re-
ceiver. These flags can be read (polled) at any time by software. Refer to Figure 7≠4,
which shows SCI interrupt arbitration.
When an overrun takes place, the new character is lost, and the character that was in
its way in the parallel RDR is undisturbed. RDRF is set when a character has been
received and transferred into the parallel RDR. The OR flag is set instead of RDRF if
overrun occurs. A new character is ready to be transferred into RDR before a previous
character is read from RDR.
The NF and FE flags provide additional information about the character in the RDR,
but do not generate interrupt requests.
The last receiver status flag and interrupt source come from the IDLE flag. The RxD
line is idle if it has constantly been at logic one for a full character time. The IDLE flag
is set only after the RxD line has been busy and becomes idle, which prevents repeat-
ed interrupts for the whole time RxD remains idle.

MOTOROLA
SERIAL COMMUNICATIONS INTERFACE
MC68HC11F1
7-12
TECHNICAL DATA
Figure 7-4 Interrupt Source Resolution Within SCI
YES
NO
RDRF = 1
?
NO ≠ VALID SCI
REQUEST
BEGIN
YES
NO
YES
NO
OR = 1
?
RIE = 1
?
YES
NO
RE = 1
?
YES
NO
YES
NO
TDRE = 1
?
TIE = 1
?
YES
NO
TE = 1
?
YES
NO
YES
NO
TC = 1
?
TCIE = 1
?
YES
NO
YES
NO
IDLE = 1
?
ILIE = 1
?
YES
NO
RE = 1
?
YES ≠ VALID SCI
REQUEST

MC68HC11F1
SERIAL PERIPHERAL INTERFACE
MOTOROLA
TECHNICAL DATA
8-1
SECTION 8 SERIAL PERIPHERAL INTERFACE
The serial peripheral interface (SPI), an independent serial communications sub-
system, allows the MCU to communicate synchronously with peripheral devices, such
as transistor-transistor logic (TTL) shift registers, liquid crystal display (LCD) drivers,
analog-to-digital converter subsystems, and other microprocessors. The SPI is also
capable of inter-processor communication in a multiple master system. The SPI sys-
tem can be configured as either a master or a slave device. When configured as a
master, data transfer rates can be as high as one-half the E-clock rate (2.5 Mbits per
second for a 5-MHz bus frequency). When configured as a slave, data transfers can
be as fast as the E-clock rate (5 Mbits per second for a 5-MHz bus frequency).
8.1 Functional Description
The central element in the SPI system is the block containing the shift register and the
read data buffer. The system is single buffered in the transmit direction and double
buffered in the receive direction. This means that new data for transmission cannot be
written to the shifter until the previous transfer is complete; however, received data is
transferred into a parallel read data buffer so the shifter is free to accept a second se-
rial character. As long as the first character is read out of the read data buffer before
the next serial character is ready to be transferred, no overrun condition occurs. A sin-
gle MCU register address is used for reading data from the read data buffer and for
writing data to the shifter.
The SPI status block represents the SPI status flags (transfer complete, write collision,
and mode fault) located in the SPI status register (SPSR). The SPI control block rep-
resents those functions that control the SPI system through the serial peripheral con-
trol register (SPCR).
Refer to Figure 8-1, which shows the SPI block diagram.

MOTOROLA
SERIAL PERIPHERAL INTERFACE
MC68HC11F1
8-2
TECHNICAL DATA
Figure 8-1 SPI Block Diagram
8.2 SPI Transfer Formats
During an SPI transfer, data is simultaneously transmitted and received. A serial clock
line synchronizes shifting and sampling of the information on the two serial data lines.
A slave select line allows individual selection of a slave SPI device; slave devices that
are not selected do not interfere with SPI bus activities. On a master SPI device, the
select line can optionally be used to indicate a multiple master bus contention. Refer
to Figure 8-2.
INTERNAL
MCU CLOCK
DIVIDER
˜
2
˜
4
˜
16
˜
32
SELECT
SPI CLOCK (MASTER)
8-BIT SHIFT REGISTER
READ DATA BUFFER
CLOCK
CLOCK
LOGIC
S
M
M
S
PIN
CONTROL
LOGIC
MISO/
PD2
MOSI/
PD3
SCK/
PD4
SS/
PD5
M
S
MSTR
SPE
DWOM
SPR1
SPR0
MSTR
SPE
SPIE
SPIE
SPE
DWOM
MSTR
CPHA
CPOL
SPR1
SPR0
SPCR SPI CONTROL REGISTER
SPIF
WCOL
MODF
SPSR SPI STATUS REGISTER
SPI CONTROL
INTERNAL
DATA BUS
SPI INTERRUPT
REQUEST
MSB
LSB
8
8
8

MC68HC11F1
SERIAL PERIPHERAL INTERFACE
MOTOROLA
TECHNICAL DATA
8-3
Figure 8-2 SPI Transfer Format
8.2.1 Clock Phase and Polarity Controls
Software can select one of four combinations of serial clock phase and polarity using
two bits in the SPI control register (SPCR). The clock polarity is specified by the CPOL
control bit, which selects an active high or active low clock, and has no significant ef-
fect on the transfer format. The clock phase (CPHA) control bit selects one of two dif-
ferent transfer formats. The clock phase and polarity should be identical for the master
SPI device and the communicating slave device. In some cases, the phase and polar-
ity are changed between transfers to allow a master device to communicate with pe-
ripheral slaves having different requirements.
When CPHA equals zero, the SS line must be negated and reasserted between each
successive serial byte. Also, if the slave writes data to the SPI data register (SPDR)
while SS is low, a write collision error results.
When CPHA equals one, the SS line can remain low between successive transfers.
8.3 SPI Signals
The following paragraphs contain descriptions of the four SPI signals: master in slave
out (MISO), master out slave in (MOSI), serial clock (SCK), and slave select (SS).
Any SPI output line must have its corresponding data direction bit in DDRD register
set. If the DDR bit is clear, that line is disconnected from the SPI logic and becomes a
general-purpose input. All SPI input lines are forced to act as inputs regardless of the
state of the corresponding DDR bits in DDRD register.
2
3
4
5
6
7
8
1
SCK (CPOL = 1)
SCK (CPOL = 0)
SCK CYCLE #
SS (TO SLAVE)
6
5
4
3
2
1
LSB
MSB
MSB
6
5
4
3
2
1
LSB
SAMPLE INPUT
DATA OUT
SAMPLE INPUT
DATA OUT
(CPHA = 1)
(CPHA = 0)
SLAVE CPHA = 1 TRANSFER IN PROGRESS
MASTER TRANSFER IN PROGRESS
SLAVE CPHA = 0 TRANSFER IN PROGRESS
3
2
1
5
4
SS ASSERTED
MASTER WRITES
FIRST SCK EDGE
SPIF SET
SS NEGATED
1
2
3
4
5
TO SPDR

MOTOROLA
SERIAL PERIPHERAL INTERFACE
MC68HC11F1
8-4
TECHNICAL DATA
8.3.1 Master In Slave Out
MISO is one of two unidirectional serial data signals. It is an input to a master device
and an output from a slave device. The MISO line of a slave device is placed in the
high-impedance state if the slave device is not selected.
8.3.2 Master Out Slave In
The MOSI line is the second of the two unidirectional serial data signals. It is an output
from a master device and an input to a slave device. The master device places data
on the MOSI line a half-cycle before the clock edge that the slave device uses to latch
the data.
8.3.3 Serial Clock
SCK, an input to a slave device, is generated by the master device and synchronizes
data movement in and out of the device through the MOSI and MISO lines. Master and
slave devices are capable of exchanging a byte of information during a sequence of
eight clock cycles.
There are four possible timing relationships that can be chosen by using control bits
CPOL and CPHA in the serial peripheral control register (SPCR). Both master and
slave devices must operate with the same timing. The SPI clock rate select bits,
SPR[1:0], in the SPCR of the master device, select the clock rate. In a slave device,
SPR[1:0] have no effect on the operation of the SPI.
8.3.4 Slave Select
The slave select (SS) input of a slave device must be externally asserted before a
master device can exchange data with the slave device. SS must be low before data
transactions and must stay low for the duration of the transaction.
The SS line of the master must be held high. If it goes low, a mode fault error flag
(MODF) is set in the serial peripheral status register (SPSR). To disable the mode fault
circuit, write a one in bit 5 of the port D data direction register. This sets the SS pin to
act as a general-purpose output rather than the dedicated input to the slave select cir-
cuit, thus inhibiting the mode fault flag. The other three lines are dedicated to the SPI
whenever the serial peripheral interface is on.
The state of the master and slave CPHA bits affects the operation of SS. CPHA set-
tings should be identical for master and slave. When CPHA = 0, the shift clock is the
OR of SS with SCK. In this clock phase mode, SS must go high between successive
characters in an SPI message. When CPHA = 1, SS can be left low between succes-
sive SPI characters. In cases where there is only one SPI slave MCU, its SS line can
be tied to V
ss
as long as only CPHA = 1 clock mode is used.
8.4 SPI System Errors
Two system errors can be detected by the SPI system. The first type of error arises in
a multiple-master system when more than one SPI device simultaneously tries to be
a master. This error is called a mode fault. The second type of error, write collision,
indicates that an attempt was made to write data to the SPDR while a transfer was in
progress.

MC68HC11F1
SERIAL PERIPHERAL INTERFACE
MOTOROLA
TECHNICAL DATA
8-5
When the SPI system is configured as a master and the SS input line goes to active
low, a mode fault error has occurred -- usually because two devices have attempted
to act as master at the same time. In cases where more than one device is concurrent-
ly configured as a master, there is a chance of contention between two pin drivers. For
push-pull CMOS drivers, this contention can cause permanent damage. The mode
fault mechanism attempts to protect the device by disabling the drivers. The MSTR
control bit in the SPCR and all four DDRD control bits associated with the SPI are
cleared and an interrupt is generated subject to masking by the SPIE control bit and
the I bit in the CCR.
Other precautions may need to be taken to prevent driver damage. If two devices are
made masters at the same time, mode fault does not help protect either one unless
one of them selects the other as slave. The amount of damage possible depends on
the length of time both devices attempt to act as master.
A write collision error occurs if the SPDR is written while a transfer is in progress. Be-
cause the SPDR is not double buffered in the transmit direction, writes to SPDR cause
data to be written directly into the SPI shift register. Because this write corrupts any
transfer in progress, a write collision error is generated. The transfer continues undis-
turbed, and the write data that caused the error is not written to the shifter.
A write collision is normally a slave error because a slave has no control over when a
master initiates a transfer. A master knows when a transfer is in progress, so there is
no reason for a master to generate a write-collision error, although the SPI logic can
detect write collisions in both master and slave devices.
The SPI configuration determines the characteristics of a transfer in progress. For a
master, a transfer begins when data is written to SPDR and ends when SPIF is set.
For a slave with CPHA equal to zero, a transfer starts when SS goes low and ends
when SS returns high. In this case, SPIF is set at the middle of the eighth SCK cycle
when data is transferred from the shifter to the parallel data register, but the transfer
is still in progress until SS goes high. For a slave with CPHA equal to one, transfer be-
gins when the SCK line goes to its active level, which is the edge at the beginning of
the first SCK cycle. The transfer ends in a slave in which CPHA equals one when SPIF
is set.
8.5 SPI Registers
The three SPI registers, SPCR, SPSR, and SPDR, provide control, status, and data
storage functions. Refer to the following information for a description of how these reg-
isters are organized.
8.5.1 Serial Peripheral Control
SPCR -- Serial Peripheral Control Register
$1028
Bit 7
6
5
4
3
2
1
Bit 0
SPIE
SPE
DWOM
MSTR
CPOL
CPHA
SPR1
SPR0
RESET:
0
0
0
0
0
1
U
U

MOTOROLA
SERIAL PERIPHERAL INTERFACE
MC68HC11F1
8-6
TECHNICAL DATA
SPIE -- Serial Peripheral Interrupt Enable
Set the SPE bit to one to request a hardware interrupt sequence each time the SPIF
or MODF status flag is set. SPI interrupts are inhibited if this bit is clear or if the I bit in
the condition code register is one.
0 = SPI system interrupts disabled
1 = SPI system interrupts enabled
SPE -- Serial Peripheral System Enable
When the SPE bit is set, the port D bit 2, 3, 4, and 5 pins are dedicated to the SPI func-
tion. If the SPI is in the master mode and DDRD bit 5 is set, then the port D bit 5 pin
becomes a general-purpose output instead of the SS input.
0 = SPI system disabled
1 = SPI system enabled
DWOM -- Port D Wired-OR Mode
DWOM affects all port D pins.
0 = Normal CMOS outputs
1 = Open-drain outputs
MSTR -- Master Mode Select
0 = Slave mode
1 = Master mode
CPOL -- Clock Polarity
When the clock polarity bit is cleared and data is not being transferred, the SCK pin of
the master device has a steady state low value. When CPOL is set, SCK idles high.
Refer to Figure 8-2 and 8.2.1 Clock Phase and Polarity Controls.
CPHA -- Clock Phase
The clock phase bit, in conjunction with the CPOL bit, controls the clock-data relation-
ship between master and slave. The CPHA bit selects one of two different clocking
protocols. Refer to Figure 8-2 and 8.2.1 Clock Phase and Polarity Controls.
SPR[1:0] -- SPI Clock Rate Selects
These two bits select the SPI clock (SCK) rate when the device is configured as mas-
ter. When the device is configured as slave, these bits have no effect. Refer to Table
8-1.
Table 8-1 SPI Clock Rates
SPR[1:0]
E Clock
Divide By
Frequency at
E = 2 MHz
Frequency at
E = 3 MHz
Frequency at
E = 4 MHz
Frequency at
E = 5 MHz
0 0
2
1.0 MHz
1.5 MHz
2.0 MHz
2.5 MHz
0 1
4
500 kHz
750 kHz
1.0 MHz
625 kHz
1 0
16
125 kHz
187.5 kHz
250 kHz
156.25 kHz
1 1
32
62.5 kHz
93.7 kHz
125 kHz
78.125 kHz

MC68HC11F1
SERIAL PERIPHERAL INTERFACE
MOTOROLA
TECHNICAL DATA
8-7
8.5.2 Serial Peripheral Status
SPIF -- SPI Interrupt Complete Flag
SPIF is set upon completion of data transfer between the processor and the external
device. If SPIF goes high, and if SPIE is set, a serial peripheral interrupt is generated.
To clear the SPIF bit, read the SPSR then access the SPDR. Unless SPSR is read
(with SPIF set) first, attempts to write SPDR are inhibited.
WCOL -- Write Collision
Clearing the WCOL bit is accomplished by reading the SPSR followed by an access of
SPDR. Refer to 8.3.4 Slave Select and 8.4 SPI System Errors.
0 = No write collision
1 = Write collision
Bit 5 -- Not implemented
Always reads zero
MODF -- Mode Fault
To clear the MODF bit, read the SPSR then write to the SPCR. Refer to 8.3.4 Slave
Select and 8.4 SPI System Errors.
0 = No mode fault
1 = Mode fault
Bits [3:0] -- Not implemented
Always read zero
8.5.3 Serial Peripheral Data Register
The SPDR is used when transmitting or receiving data on the serial bus. Only a write
to this register initiates transmission or reception of a byte, and this only occurs in the
master device. At the completion of transferring a byte of data, the SPIF status bit is
set in both the master and slave devices.
A read of the SPDR is actually a read of a buffer. To prevent an overrun and the loss
of the byte that caused the overrun, the first SPIF must be cleared by the time a second
transfer of data from the shift register to the read buffer is initiated.
SPI is double buffered in and single buffered out.
SPSR -- Serial Peripheral Status Register
$1029
Bit 7
6
5
4
3
2
1
Bit 0
SPIF
WCOL
--
MODF
--
--
--
--
RESET:
0
0
0
0
0
0
0
0
SPDR -- SPI Data Register
$102A
Bit 7
6
5
4
3
2
1
Bit 0
Bit 7
6
5
4
3
2
1
Bit 0

MOTOROLA
SERIAL PERIPHERAL INTERFACE
MC68HC11F1
8-8
TECHNICAL DATA

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-1
SECTION 9 TIMING SYSTEM
The M68HC11 timing system is composed of five clock divider chains. The main clock
divider chain includes a 16-bit free-running counter, which is driven by a programma-
ble prescaler. The main timer's programmable prescaler provides one of the four
clocking rates to drive the 16-bit counter. Two prescaler control bits select the prescale
rate.
The prescaler output divides the system clock by 1, 4, 8, or 16. Taps off of this main
clocking chain drive circuitry that generates the slower clocks used by the pulse accu-
mulator, the real-time interrupt (RTI), and the computer operating properly (COP)
watchdog subsystems, also described in this section. Refer to Figure 9-1.
All main timer system activities are referenced to this free-running counter. The
counter begins incrementing from $0000 as the MCU comes out of reset, and contin-
ues to the maximum count, $FFFF. At the maximum count, the counter rolls over to
$0000, sets an overflow flag, and continues to increment. As long as the MCU is run-
ning in a normal operating mode, there is no way to reset, change, or interrupt the
counting. The capture/compare subsystem features three input capture channels, four
output compare channels, and one channel that can be selected to perform either in-
put capture or output compare. Each of the three input capture functions has its own
16-bit input capture register (time capture latch) and each of the output compare func-
tions has its own 16-bit compare register. All timer functions, including the timer over-
flow and RTI have their own interrupt controls and separate interrupt vectors.
The pulse accumulator contains an 8-bit counter and edge select logic. The pulse ac-
cumulator can operate in either event counting mode or gated time accumulation
mode. During event counting mode, the pulse accumulator's 8-bit counter increments
when a specified edge is detected on an input signal. During gated time accumulation
mode, an internal clock source increments the 8-bit counter while an input signal has
a predetermined logic level.
The real-time interrupt (RTI) is a programmable periodic interrupt circuit that permits
pacing the execution of software routines by selecting one of four interrupt rates.
The COP watchdog clock input (E
˜
2
15
) is tapped off of the free-running counter
chain. The COP automatically times out unless it is serviced within a specific time by
a program reset sequence. If the COP is allowed to time out, a reset is generated,
which drives the RESET pin low to reset the MCU and the external system. Refer to
Table 9-1 for crystal related frequencies and periods.

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-2
TECHNICAL DATA
Figure 9-1 Timer Clock Divider Chains
R
Q
FF2
S
Q
OSCILLATOR AND
CLOCK GENERATOR
AS
E CLOCK
SPI
SCI RECEIVER CLOCK
SCI TRANSMIT CLOCK
E
˜
2
6
PULSE ACCUMULATOR
TCNT
REAL-TIME INTERRUPT
E
˜
2
13
˜
4
E
˜
2
15
R
Q
FORCE
COP
RESET
SYSTEM
RESET
CLEAR COP
TIMER
FF1
(DIVIDE BY FOUR)
INTERNAL BUS CLOCK (PH2)
IC/OC
˜
16
CR[1:0]
PRESCALER
(
˜
1, 4, 16, 64)
PRESCALER
(
˜
2, 4, 16, 32)
SPR[1:0]
PRESCALER
(
˜
1, 3, 4, 13)
SCP[1:0]
PRESCALER
(
˜
1, 2, 4, 8)
RTR[1:0]
PRESCALER
(
˜
1, 2, 4,....128)
SCR[2:0]
PRESCALER
(
˜
1, 4, 8, 16)
PR[1:0]
S
Q
TOF

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-3
9.1 Timer Structure
Figure 9-2 shows the capture/compare system block diagram. The port A pin control
block includes logic for timer functions and for general-purpose I/O. For pins PA3,
PA2, PA1, and PA0, this block contains both the edge-detection logic and the control
logic that enables the selection of which edge triggers an input capture. The digital lev-
el on PA[3:0] can be read at any time (read PORTA register), even if the pin is being
used for the input capture function. Pins PA[6:3] are used for either general-purpose
I/O, or as output compare pins. When one of these pins is being used for an output
compare function, it cannot be written directly as if it were a general-purpose output.
Each of the output compare functions (OC[5:2]) is related to one of the port A output
pins. Output compare one (OC1) has extra control logic, allowing it optional control of
any combination of the PA[7:3] pins. The PA7 pin can be used as a general-purpose
I/O pin, as an input to the pulse accumulator, or as an OC1 output pin.
Table 9-1 Timer Summary
XTAL Frequencies
4.0 MHz
8.0 MHz
12.0 MHz
16.0 MHz
Other Rates
1.0 MHz
2.0 MHz
3.0 MHz
4.0 MHz
(E)
Control Bits
1000 ns
500 ns
333 ns
250 ns
(1/E)
PR1, PR0
Main Timer Count Rates
0 0
1 count --
overflow --
1.0
µ
s
65.536 ms
500 ns
32.768 ms
333 ns
21.845 ms
250 ns
16.384 ms
(1/E)
(2
16
/E)
0 1
1 count --
overflow --
4.0
µ
s
262.14 ms
2.0
µ
s
131.07 ms
1.333
µ
s
87.381 ms
1.0
µ
s
65.536 ms
(4/E)
(2
18
/E)
1 0
1 count --
overflow --
8.0
µ
s
524.29 ms
4.0
µ
s
262.14 ms
2.667
µ
s
174.76 ms
2.0
µ
s
131.07 ms
(8/E)
(2
19
/E)
1 1
1 count --
overflow --
16.0
µ
s
1.049 s
8.0
µ
s
524.29 ms
5.333
µ
s
349.52 ms
4.0
µ
s
262.14 ms
(16/E)
(2
20
/E)

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-4
TECHNICAL DATA
Figure 9-2 Capture/Compare Block Diagram
PA3/
OC5/
IC4/
OC1
16-BIT LATCH
CLK
TIC1 (HI)
16-BIT COMPARATOR =
IC3F
OC2F
OC3F
I4/O5F
TFLG1
TMSK1
IC1F
IC1I
3
IC2F
IC2I
2
IC3I
1
OC4F
I4/O5I
16-BIT TIMER BUS
16-BIT FREE-RUNNING
COUNTER
TCNT (HI)
TOF
TOI
9
PR1
PR0
PRESCALER≠DIVIDE BY
1, 4, 8, OR 16
I4/O5
OC1I
8
FOC1
OC2I
7
FOC2
OC3I
6
FOC3
OC4I
5
FOC4
4
FOC5
STATUS
FLAGS
FORCE
OUTPUT
COMPARE
INTERRUPT
ENABLES
PORT A
OC5
IC4
CFORC
16-BIT TIMER BUS
OC1F
BIT-7
BIT-6
BIT-5
BIT-4
BIT-3
BIT-2
BIT-1
BIT-0
PIN
FUNCTIONS
TCNT (LO)
PA2/
IC1
TIC1 (LO)
16-BIT LATCH
CLK
TIC2 (HI)
TIC2 (LO)
16-BIT LATCH
CLK
TIC3 (HI)
TIC3 (LO)
TOC1 (HI)
TOC1 (LO)
TOC2 (HI)
TOC2 (LO)
TOC3 (HI)
TOC3 (LO)
TOC4 (HI)
TOC4 (LO)
16-BIT LATCH
CLK
TI4/O5 (HI)
TI4/O5 (LO)
16-BIT COMPARATOR =
16-BIT COMPARATOR =
16-BIT COMPARATOR =
16-BIT COMPARATOR =
MCU
ECLK
INTERRUPT REQUESTS
(FURTHER QUALIFIED
BY I-BIT IN CCR)
PIN
CONTROL
PA7/
OC1/
PAI
PA6/
OC2/
OC1
PA5/
OC3/
OC1
PA4/
OC4/
OC1
PA1/
IC2
PA0/
IC3
TO
PULSE
ACCUMULATOR
TAPS FOR RTI, COP
WATCHDOG AND
PULSE ACCUMULATOR

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-5
9.2 Input Capture
The input capture function records the time an external event occurs by latching the
value of the free-running counter when a selected edge is detected at the associated
timer input pin. Software can store latched values and use them to compute the peri-
odicity and duration of events. For example, by storing the times of successive edges
of an incoming signal, software can determine the period and pulse width of a signal.
To measure period, two successive edges of the same polarity are captured. To mea-
sure pulse width, two alternate polarity edges are captured.
In most cases, input capture edges are asynchronous to the internal timer counter,
which is clocked relative to an internal clock (PH2). These asynchronous capture re-
quests are synchronized to PH2 so that the latching occurs on the opposite half cycle
of PH2 from when the timer counter is being incremented. This synchronization pro-
cess introduces a delay from when the edge occurs to when the counter value is de-
tected. Because these delays offset each other when the time between two edges is
being measured, the delay can be ignored. When an input capture is being used with
an output compare, there is a similar delay between the actual compare point and
when the output pin changes state.
The control and status bits that implement the input capture functions are contained in
the PACTL, TCTL2, TMSK1, and TFLG1 registers.
To configure port A bit 3 as an input capture, clear the DDA3 bit of the DDRA register.
Note that this bit is cleared out of reset. To enable PA3 as the fourth input capture, set
the I4/O5 bit in the PACTL register. Otherwise, PA3 is configured as a fifth output com-
pare out of reset, with bit I4/O5 being cleared. If the DDA3 bit is set (configuring PA3
as an output), and IC4 is enabled, then writes to PA3 cause edges on the pin to result
in input captures. Writing to TI4/O5 has no effect when the TI4/O5 register is acting as
IC4.
9.2.1 Timer Control Register 2
Use the control bits of this register to program input capture functions to detect a par-
ticular edge polarity on the corresponding timer input pin. Each of the input capture
functions can be independently configured to detect rising edges only, falling edges
only, any edge (rising or falling), or to disable the input capture function. The input cap-
ture functions operate independently of each other and can capture the same TCNT
value if the input edges are detected within the same timer count cycle.
EDGxB and EDGxA -- Input Capture Edge Control
There are four pairs of these bits. Each pair is cleared to zero by reset and must be
encoded to configure the corresponding input capture edge detector circuit. IC4 func-
tions only if the I4/O5 bit in the PACTL register is set. Refer to Table 9-2 for timer con-
trol configuration.
TCTL2 -- Timer Control 2
$1021
Bit 7
6
5
4
3
2
1
Bit 0
EDG4B
EDG4A
EDG1B
EDG1A
EDG2B
EDG2A
EDG3B
EDG3A
RESET:
0
0
0
0
0
0
0
0

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-6
TECHNICAL DATA
9.2.2 Timer Input Capture Registers
When an edge has been detected and synchronized, the 16-bit free-running counter
value is transferred into the input capture register pair as a single 16-bit parallel trans-
fer. Timer counter value captures and timer counter incrementing occur on opposite
half-cycles of the phase 2 clock so that the count value is stable whenever a capture
occurs. The TICx registers are not affected by reset. Input capture values can be read
from a pair of 8-bit read-only registers. A read of the high-order byte of an input capture
register pair inhibits a new capture transfer for one bus cycle. If a double-byte read in-
struction, such as LDD, is used to read the captured value, coherency is assured.
When a new input capture occurs immediately after a high-order byte read, transfer is
delayed for an additional cycle but the value is not lost.
TICx not affected by reset.
9.2.3 Timer Input Capture 4/Output Compare 5 Register
Use TI4/O5 as either an input capture register or an output compare register, depend-
ing on the function chosen for the PA3 pin. To enable it as an input capture pin, set the
I4/O5 bit in the pulse accumulator control register (PACTL) to logic level one. To use
it as an output compare register, set the I4/O5 bit to a logic level zero. Refer to 9.6
Pulse Accumulator.
The TI4/O5 register pair resets to ones ($FFFF).
9.3 Output Compare
Use the output compare (OC) function to program an action to occur at a specific time
-- when the 16-bit counter reaches a specified value. For each of the five output com-
pare functions, there is a separate 16-bit compare register and a dedicated 16-bit com-
parator. The value in the compare register is compared to the value of the free-running
counter on every bus cycle. When the compare register matches the counter value, an
output compare status flag is set. The flag can be used to initiate the automatic actions
for that output compare function.
TIC1≠TIC3 -- Timer Input Capture
$1010≠$1015
$1010
Bit 15
14
13
12
11
10
9
Bit 8
TIC1 (High)
$1011
Bit 7
6
5
4
3
2
1
Bit 0
TIC1 (Low)
$1012
Bit 15
14
13
12
11
10
9
Bit 8
TIC2 (High)
$1013
Bit 7
6
5
4
3
2
1
Bit 0
TIC2 (Low)
$1014
Bit 15
14
13
12
11
10
9
Bit 8
TIC3 (High)
$1015
Bit 7
6
5
4
3
2
1
Bit 0
TIC3 (Low)
TI4/O5 -- Timer Input Capture 4/Output Compare 5
$101E, $101F
$101E
Bit 15
14
13
12
11
10
9
Bit 8
TI4/O5 (High)
$101F
Bit 7
6
5
4
3
2
1
Bit 0
TI4/O5 (Low)

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-7
To produce a pulse of a specific duration, write a value to the output compare register
that represents the time the leading edge of the pulse is to occur. The output compare
circuit is configured to set the appropriate output either high or low, depending on the
polarity of the pulse being produced. After a match occurs, the output compare register
is reprogrammed to change the output pin back to its inactive level at the next match.
A value representing the width of the pulse is added to the original value, and then writ-
ten to the output compare register. Because the pin state changes occur at specific
values of the free-running counter, the pulse width can be controlled accurately at the
resolution of the free-running counter, independent of software latencies. To generate
an output signal of a specific frequency and duty cycle, repeat this pulse-generating
procedure.
There are four 16-bit read/write output compare registers: TOC1, TOC2, TOC3, and
TOC4, and the TI4/O5 register, which functions under software control as either IC4
or OC5. Each of the OC registers is set to $FFFF on reset. A value written to an OC
register is compared to the free-running counter value during each E-clock cycle. If a
match is found, the particular output compare flag is set in timer interrupt flag register
1 (TFLG1). If that particular interrupt is enabled in the timer interrupt mask register 1
(TMSK1), an interrupt is generated. In addition to an interrupt, a specified action can
be initiated at one or more timer output pins. For OC[5:2], the pin action is controlled
by pairs of bits (OMx and OLx) in the TCTL1 register. The output action is taken on
each successful compare, regardless of whether or not the OCxF flag in the TFLG1
register was previously cleared.
OC1 is different from the other output compares in that a successful OC1 compare can
affect any or all five of the OC pins. The OC1 output action taken when a match is
found is controlled by two 8-bit registers with three bits unimplemented: the output
compare 1 mask register, OC1M, and the output compare 1 data register, OC1D.
OC1M specifies which port A outputs are to be used, and OC1D specifies what data
is placed on these port pins.
9.3.1 Timer Output Compare Registers
All output compare registers are 16-bit read-write. Each is initialized to $FFFF at reset.
If an output compare register is not used for an output compare function, it can be used
as a storage location. A write to the high-order byte of an output compare register pair
inhibits the output compare function for one bus cycle. This inhibition prevents inap-
propriate subsequent comparisons. Coherency requires a complete 16-bit read or
write. However, if coherency is not needed, byte accesses can be used.
For output compare functions, write a comparison value to output compare registers
TOC1≠TOC4 and TI4/O5. When TCNT value matches the comparison value, speci-
fied pin actions occur.

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-8
TECHNICAL DATA
All TOCx register pairs reset to ones ($FFFF).
9.3.2 Timer Compare Force Register
The CFORC register allows forced early compares. FOC[1:5] correspond to the five
output compares. These bits are set for each output compare that is to be forced. The
action taken as a result of a forced compare is the same as if there were a match be-
tween the OCx register and the free-running counter, except that the corresponding
interrupt status flag bits are not set. The forced channels trigger their programmed pin
actions to occur at the next timer count transition after the write to CFORC.
The CFORC bits should not be used on an output compare function that is pro-
grammed to toggle its output on a successful compare because a normal compare that
occurs immediately before or after the force can result in an undesirable operation.
FOC[1:5] -- Force Output Comparison
When the FOC bit associated with an output compare circuit is set, the output compare
circuit immediately performs the action it is programmed to do when an output match
occurs.
0 = Not affected
1 = Output x action occurs
Bits [2:0] -- Not implemented
Always read zero
9.3.3 Output Compare Mask Registers
Use OC1M with OC1 to specify the bits of port A that are affected by a successful OC1
compare. The bits of the OC1M register correspond to PA[7:3].
TOC1≠TOC4 -- Timer Output Compare
$1016≠$101D
$1016
Bit 15
14
13
12
11
10
9
Bit 8
TOC1 (High)
$1017
Bit 7
6
5
4
3
2
1
Bit 0
TOC1 (Low)
$1018
Bit 15
14
13
12
11
10
9
Bit 8
TOC2 (High)
$1019
Bit 7
6
5
4
3
2
1
Bit 0
TOC2 (Low)
$101A
Bit 15
14
13
12
11
10
9
Bit 8
TOC3 (High)
$101B
Bit 7
6
5
4
3
2
1
Bit 0
TOC3 (Low)
$101C
Bit 15
14
13
12
11
10
9
Bit 8
TOC4 (High)
$101D
Bit 7
6
5
4
3
2
1
Bit 0
TOC4 (Low)
CFORC -- Timer Compare Force
$100B
Bit 7
6
5
4
3
2
1
Bit 0
FOC1
FOC2
FOC3
FOC4
FOC5
--
--
--
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-9
OC1M[7:3] -- Output Compare Masks
0 = OC1 is disabled.
1 = OC1 is enabled to control the corresponding pin of port A
Bits [2:0] -- Not implemented
Always read zero
9.3.4 Output Compare Data Register
Use this register with OC1 to specify the data that is to be stored on the affected pin
of port A after a successful OC1 compare. When a successful OC1 compare occurs,
a data bit in OC1D is stored in the corresponding bit of port A for each bit that is set in
OC1M.
If OC1Mx is set, data in OC1Dx is output to port A bit x on successful OC1 compares.
Bits [2:0] -- Not implemented
Always read zero
9.3.5 Timer Counter Register
The 16-bit read-only TCNT register contains the prescaled value of the 16-bit timer. A
full counter read addresses the most significant byte (MSB) first. A read of this address
causes the least significant byte (LSB) to be latched into a buffer for the next CPU cy-
cle so that a double-byte read returns the full 16-bit state of the counter at the time of
the MSB read cycle.
TCNT resets to $0000. In normal modes, TCNT is a read-only register.
9.3.6 Timer Control Register 1
The bits of this register specify the action taken as a result of a successful OCx com-
pare.
OC1M -- Output Compare 1 Mask
$100C
Bit 7
6
5
4
3
2
1
Bit 0
OC1M7
OC1M6
OC1M5
OC1M4
OC1M3
--
--
--
RESET:
0
0
0
0
0
0
0
0
OC1D -- Output Compare 1 Data
$100D
Bit 7
6
5
4
3
2
1
Bit 0
OC1D7
OC1D6
OC1D5
OC1D4
OC1D3
--
--
--
RESET:
0
0
0
0
0
0
0
0
TCNT -- Timer Counter
$100E, $100F
$100E
Bit 15
14
13
12
11
10
9
Bit 8
TCNT (High)
$100F
Bit 7
6
5
4
3
2
1
Bit 0
TCNT (Low)

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-10
TECHNICAL DATA
OM[2:5] -- Output Mode
OL[2:5] -- Output Level
These control bit pairs are encoded to specify the action taken after a successful OCx
compare. OC5 functions only if the I4/O5 bit in the PACTL register is clear. Refer to
Table 9-3 for the coding.
9.3.7 Timer Interrupt Mask Register 1
Use this 8-bit register to enable or inhibit the timer input capture and output compare
interrupts.
OC1I≠OC4I -- Output Compare x Interrupt Enable
If the OCxI enable bit is set when the OCxF flag bit is set, a hardware interrupt se-
quence is requested.
I4/O5I -- Input Capture 4/Output Compare 5 Interrupt Enable
When I4/O5 in PACTL is one, I4/O5I is the input capture 4 interrupt enable bit. When
I4/O5 in PACTL is zero, I4/O5I is the output compare 5 interrupt enable bit.
IC1I≠IC3I -- Input Capture x Interrupt Enable
If the ICxI enable bit is set when the ICxF flag bit is set, a hardware interrupt sequence
is requested.
NOTE
Bits in TMSK1 correspond bit for bit with flag bits in TFLG1. Ones in
TMSK1 enable the corresponding interrupt sources.
TCTL1 -- Timer Control 1
$1020
Bit 7
6
5
4
3
2
1
Bit 0
OM2
OL2
OM3
OL3
OM4
OL4
OM5
OL5
RESET:
0
0
0
0
0
0
0
0
Table 9-2 Timer Output Compare Configuration
OMx
OLx
Action Taken on Successful Compare
0
0
Timer disconnected from output pin logic
0
1
Toggle OCx output line
1
0
Clear OCx output line to zero
1
1
Set OCx output line to one
TMSK1 -- Timer Interrupt Mask 1
$1022
Bit 7
6
5
4
3
2
1
Bit 0
OC1I
OC2I
OC3I
OC4I
I4/O5I
IC1I
IC2I
IC3I
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-11
9.3.8 Timer Interrupt Flag Register 1
Bits in this register indicate when timer system events have occurred. Coupled with
the bits of TMSK1, the bits of TFLG1 allow the timer subsystem to operate in either a
polled or interrupt driven system. Each bit of TFLG1 corresponds to a bit in TMSK1 in
the same position.
Clear flags by writing a one to the corresponding bit position(s).
OC1F≠OC4F -- Output Compare x Flag
Set each time the counter matches output compare x value
I4/O5F -- Input Capture 4/Output Compare 5 Flag
Set by IC4 or OC5, depending on the function enabled by I4/O5 bit in PACTL
IC1F≠IC3F -- Input Capture x Flag
Set each time a selected active edge is detected on the ICx input line
9.3.9 Timer Interrupt Mask Register 2
Use this 8-bit register to enable or inhibit timer overflow and real-time interrupts. The
timer prescaler control bits are included in this register.
TOI -- Timer Overflow Interrupt Enable
0 = TOF interrupts disabled
1 = Interrupt requested when TOF is set to one
RTII -- Real-Time Interrupt Enable
Refer to 9.4 Real-Time Interrupt.
PAOVI -- Pulse Accumulator Overflow Interrupt Enable
Refer to 9.6.3 Pulse Accumulator Status and Interrupt Bits.
PAII -- Pulse Accumulator Input Edge Interrupt Enable
Refer to 9.6.3 Pulse Accumulator Status and Interrupt Bits.
PR[1:0] -- Timer Prescaler Select
These bits are used to select the prescaler divide-by ratio. In normal modes, PR[1:0]
can only be written once, and the write must be within 64 cycles after reset. Refer to
Table 9-1 and Table 9-4 for specific timing values.
TFLG1 -- Timer Interrupt Flag 1
$1023
Bit 7
6
5
4
3
2
1
Bit 0
OC1F
OC2F
OC3F
OC4F
I4/O5F
IC1F
IC2F
IC3F
RESET:
0
0
0
0
0
0
0
0
TMSK2 -- Timer Interrupt Mask 2
$1024
Bit 7
6
5
4
3
2
1
Bit 0
TOI
RTII
PAOVI
PAII
--
--
PR1
PR0
RESET:
0
0
0
0
0
0
0
0

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-12
TECHNICAL DATA
NOTE
Bits in TMSK2 correspond bit for bit with flag bits in TFLG2. Ones in
TMSK2 enable the corresponding interrupt sources.
9.3.10 Timer Interrupt Flag Register 2
Bits in this register indicate when certain timer system events have occurred. Coupled
with the four high-order bits of TMSK2, the bits of TFLG2 allow the timer subsystem to
operate in either a polled or interrupt driven system. Each bit of TFLG2 corresponds
to a bit in TMSK2 in the same position.
Clear flags by writing a one to the corresponding bit position(s).
TOF -- Timer Overflow Interrupt Flag
Set when TCNT changes from $FFFF to $0000
RTIF -- Real-Time (Periodic) Interrupt Flag
Refer to 9.4 Real-Time Interrupt.
PAOVF -- Pulse Accumulator Overflow Interrupt Flag
Refer to 9.6 Pulse Accumulator.
PAIF -- Pulse Accumulator Input Edge Interrupt Flag
Refer to 9.6 Pulse Accumulator.
Bits [3:0] -- Not implemented
Always read zero
9.4 Real-Time Interrupt
The real-time interrupt (RTI) feature, used to generate hardware interrupts at a fixed
periodic rate, is controlled and configured by two bits (RTR1 and RTR0) in the pulse
accumulator control (PACTL) register. The RTII bit in the TMSK2 register enables the
interrupt capability. The four different rates available are a product of the MCU oscil-
lator frequency and the value of bits RTR[1:0]. Refer to Table 9-4, which shows the
periodic real-time interrupt rates.
Table 9-3 Timer Prescaler Selection
PR[1:0]
Prescaler
0 0
1
0 1
4
1 0
8
1 1
16
TFLG2 -- Timer Interrupt Flag 2
$1025
Bit 7
6
5
4
3
2
1
Bit 0
TOF
RTIF
PAOVF
PAIF
--
--
--
--
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-13
The clock source for the RTI function is a free-running clock that cannot be stopped or
interrupted except by reset. This clock causes the time between successive RTI time-
outs to be a constant that is independent of the software latencies associated with flag
clearing and service. For this reason, an RTI period starts from the previous time-out,
not from when RTIF is cleared.
Every time-out causes the RTIF bit in TFLG2 to be set, and if RTII is set, an interrupt
request is generated. After reset, one entire RTI period elapses before the RTIF flag
is set for the first time. Refer to the TMSK2, TFLG2, and PACTL registers.
9.4.1 Timer Interrupt Mask Register 2
This register contains the real-time interrupt enable bits.
TOI -- Timer Overflow Interrupt Enable
0 = TOF interrupts disabled
1 = Interrupt requested when TOF is set to one
RTII -- Real-Time Interrupt Enable
0 = RTIF interrupts disabled
1 = Interrupt requested when RTIF set to one
PAOVI -- Pulse Accumulator Overflow Interrupt Enable
Refer to 9.6 Pulse Accumulator.
PAII -- Pulse Accumulator Input Edge
Refer to 9.6 Pulse Accumulator.
PR[1:0] -- Timer Prescaler Select
Refer to Table 9-4.
NOTE
Bits in TMSK2 correspond bit for bit with flag bits in TFLG2. Ones in
TMSK2 enable the corresponding interrupt sources.
Table 9-4 RTI Rate Selection
RTR[1:0]
E = 1 MHz
E = 2 MHz
E = 3 MHz
E = 4 MHz
E = X MHz
0 0
0 1
1 0
1 1
8.192 ms
16.384 ms
32.768 ms
65.536 ms
4.096 ms
8.192 ms
16.384 ms
32.768 ms
2.731 ms
5.461 ms
10.923 ms
21.845 ms
2.048 ms
4.096 ms
8.192 ms
16.384 ms
(2
13
/E)
(2
14
/E)
(2
15
/E)
(2
16
/E)
TMSK2 -- Timer Interrupt Mask Register 2
$1024
Bit 7
6
5
4
3
2
1
Bit 0
TOI
RTII
PAOVI
PAII
--
--
PR1
PR0
RESET:
0
0
0
0
0
0
0
0

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-14
TECHNICAL DATA
9.4.2 Timer Interrupt Flag Register 2
Bits of this register indicate the occurrence of timer system events. Coupled with the
four high-order bits of TMSK2, the bits of TFLG2 allow the timer subsystem to operate
in either a polled or interrupt driven system. Each bit of TFLG2 corresponds to a bit in
TMSK2 in the same position.
Clear flags by writing a one to the corresponding bit position(s).
TOF -- Timer Overflow Interrupt Flag
Set when TCNT changes from $FFFF to $0000
RTIF -- Real-Time Interrupt Flag
The RTIF status bit is automatically set to one at the end of every RTI period. To clear
RTIF, write a byte to TFLG2 with bit 6 set.
PAOVF -- Pulse Accumulator Overflow Interrupt Flag
Refer to 9.6 Pulse Accumulator.
PAIF -- Pulse Accumulator Input Edge Interrupt Flag
Refer to 9.6 Pulse Accumulator.
Bits [3:0] -- Not implemented
Always read zero
9.4.3 Pulse Accumulator Control Register
Bits RTR[1:0] of this register select the rate for the RTI system. The remaining bits con-
trol the pulse accumulator and IC4/OC5 functions.
Bit 7 -- Not implemented
Always reads zero
PAEN -- Pulse Accumulator System Enable
Refer to 9.6 Pulse Accumulator.
PAMOD -- Pulse Accumulator Mode
Refer to 9.6 Pulse Accumulator.
TFLG2 -- Timer Interrupt Flag 2
$1025
Bit 7
6
5
4
3
2
1
Bit 0
TOF
RTIF
PAOVF
PAIF
--
--
--
--
RESET:
0
0
0
0
0
0
0
0
PACTL -- Pulse Accumulator Control
$1026
Bit 7
6
5
4
3
2
1
Bit 0
--
PAEN
PAMOD
PEDGE
--
I4/O5
RTR1
RTR0
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-15
PEDGE -- Pulse Accumulator Edge Control
Refer to 9.6 Pulse Accumulator.
Bit 3 -- Not implemented
Always reads zero
I4/O5 -- Input Capture 4/Output Compare
Refer to 9.6 Pulse Accumulator.
RTR[1:0] -- RTI Interrupt Rate Select
These two bits determine the rate at which the RTI system requests interrupts. The
RTI system is driven by an E divided by 2
13
rate clock that is compensated so it is in-
dependent of the timer prescaler. These two control bits select an additional division
factor. Refer to Table 9-5.
9.5 Computer Operating Properly Watchdog Function
The clocking chain for the COP function, tapped off of the main timer divider chain, is
only superficially related to the main timer system. The CR[1:0] bits in the OPTION
register and the NOCOP bit in the CONFIG register determine the status of the COP
function. One additional register, COPRST, is used to arm and clear the COP watch-
dog reset system. Refer to SECTION 5 RESETS AND INTERRUPTS for a more de-
tailed discussion of the COP function.
9.6 Pulse Accumulator
The MC68HC11F1 MCUs have an 8-bit counter that can be configured to operate ei-
ther as a simple event counter, or for gated time accumulation, depending on the state
of the PAMOD bit in the PACTL register. Refer to the pulse accumulator block dia-
gram, Figure 9-3.
In the event counting mode, the 8-bit counter is incremented by pulses on an external
pin (PAI). The maximum clocking rate for the external event counting mode is the E
clock divided by two. In gated time accumulation mode, a free-running E-clock
˜
64
signal drives the 8-bit counter, but only while the external PAI pin is activated. Refer
to Table 9-6. The pulse accumulator counter can be read or written at any time.

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-16
TECHNICAL DATA
Figure 9-3 Pulse Accumulator
Pulse accumulator control bits are also located within two timer registers, TMSK2 and
TFLG2, as described in the following paragraphs.
9.6.1 Pulse Accumulator Control Register
Four of this register's bits control an 8-bit pulse accumulator system. Another bit en-
ables either the OC5 function or the IC4 function, while two other bits select the rate
for the real-time interrupt system.
Table 9-5 Pulse Accumulator Timing
Crystal Frequency
(4
E)
E Clock
(E)
Cycle Time
(1/E)
2
6
/E
(64/E)
PACNT Overflow
(16384/E)
4.0 MHz
1.0 MHz
1000 ns
64
µ
s
16.384 ms
8.0 MHz
2.0 MHz
500 ns
32
µ
s
8.192 ms
12.0 MHz
3.0 MHz
333 ns
21.33
µ
s
5.461 ms
16.0 MHz
4.0 MHz
250 ns
16.0
µ
s
4.096 ms
PEDGE
PAMOD
PAEN
PACTL CONTROL
INTERNAL
DATA BUS
PACNT 8-BIT COUNTER
PA7/
PAI/
OC1
INTERRUPT
REQUESTS
PAIF
PAOVF
TFLG2 INTERRUPT STATUS
PAOVI
PAII
PAOVF
PAOVI
PAIF
PAII
TMSK2 INT ENABLES
1
2
OVERFLOW
ENABLE
DISABLE
FLAG SETTING
CLOCK
PAI EDGE
PAEN
PAEN
2:1
MUX
OUTPUT
BUFFER
INPUT BUFFER
AND
EDGE DETECTOR
FROM
MAIN TIMER
OC1
DATA BUS
PIN
E
˜
64 CLOCK
(FROM MAIN TIMER)
FROM DATA
DIRECTION
BIT FOR
PORT A PIN 7

MC68HC11F1
TIMING SYSTEM
MOTOROLA
TECHNICAL DATA
9-17
Bit 7 -- Not implemented
Always reads zero
PAEN -- Pulse Accumulator System Enable
0 = Pulse accumulator disabled
1 = Pulse accumulator enabled
PAMOD -- Pulse Accumulator Mode
0 = Event counter
1 = Gated time accumulation
PEDGE -- Pulse Accumulator Edge Control
This bit has different meanings depending on the state of the PAMOD bit, as shown in
Table 9-6.
Bit 3 -- Not implemented
Always reads zero
I4/O5 -- Input Capture 4/Output Compare 5
0 = Output compare 5 function enable (No IC4)
1 = Input capture 4 function enable (No OC5)
RTR[1:0] -- RTI Interrupt Rate Selects
Refer to 9.4 Real-Time Interrupt.
9.6.2 Pulse Accumulator Count Register
This 8-bit read/write register contains the count of external input events at the PAI in-
put, or the accumulated count. The PACNT is readable even if PAI is not active in gat-
ed time accumulation mode. The counter is not affected by reset and can be read or
written at any time. Counting is synchronized to the internal PH2 clock so that incre-
menting and reading occur during opposite half cycles.
PACTL -- Pulse Accumulator Control
$1026
Bit 7
6
5
4
3
2
1
Bit 0
--
PAEN
PAMOD
PEDGE
--
I4/O5
RTR1
RTR0
RESET:
0
0
0
0
0
0
0
0
Table 9-6 Pulse Accumulator Edge Detection Control
PAMOD
PEDGE
Action on Clock
0
0
PAI falling edge increments the counter.
0
1
PAI rising edge increments the counter.
1
0
A zero on PAI inhibits counting.
1
1
A one on PAI inhibits counting.
PACNT -- Pulse Accumulator Count
$1027
Bit 7
6
5
4
3
2
1
Bit 0
Bit 7
6
5
4
3
2
1
Bit 0

MOTOROLA
TIMING SYSTEM
MC68HC11F1
9-18
TECHNICAL DATA
9.6.3 Pulse Accumulator Status and Interrupt Bits
The pulse accumulator control bits, PAOVI, PAII, PAOVF, and PAIF are located within
timer registers TMSK2 and TFLG2.
PAOVI and PAOVF -- Pulse Accumulator Interrupt Enable and Overflow Flag
The PAOVF status bit is set each time the pulse accumulator count rolls over from $FF
to $00. To clear this status bit, write a one in the corresponding data bit position (bit 5)
of the TFLG2 register. The PAOVI control bit allows configuring the pulse accumulator
overflow for polled or interrupt-driven operation and does not affect the state of
PAOVF. When PAOVI is zero, pulse accumulator overflow interrupts are inhibited, and
the system operates in a polled mode, which requires that PAOVF be polled by user
software to determine when an overflow has occurred. When the PAOVI control bit is
set, a hardware interrupt request is generated each time PAOVF is set. Before leaving
the interrupt service routine, software must clear PAOVF by writing to the TFLG2 reg-
ister.
PAII and PAIF -- Pulse Accumulator Input Edge Interrupt Enable and Flag
The PAIF status bit is automatically set each time a selected edge is detected at the
PA7/PAI/OC1 pin. To clear this status bit, write to the TFLG2 register with a one in the
corresponding data bit position (bit 4). The PAII control bit allows configuring the pulse
accumulator input edge detect for polled or interrupt-driven operation but does not af-
fect setting or clearing the PAIF bit. When PAII is zero, pulse accumulator input inter-
rupts are inhibited, and the system operates in a polled mode. In this mode, the PAIF
bit must be polled by user software to determine when an edge has occurred. When
the PAII control bit is set, a hardware interrupt request is generated each time PAIF is
set. Before leaving the interrupt service routine, software must clear PAIF by writing to
the TFLG2 register.
TMSK2 -- Timer Interrupt Mask 2 Register
$1024
Bit 7
6
5
4
3
2
1
Bit 0
TOI
RTII
PAOVI
PAII
--
--
PR1
PR0
RESET:
0
0
0
0
0
0
0
0
TFLG2 -- Timer Interrupt Flag 2 Register
$1025
Bit 7
6
5
4
3
2
1
Bit 0
TOF
RTIF
PAOVF
PAIF
--
--
--
--
RESET:
0
0
0
0
0
0
0
0

MC68HC11F1
ANALOG-TO-DIGITAL CONVERTER
MOTOROLA
TECHNICAL DATA
10-1
SECTION 10 ANALOG-TO-DIGITAL CONVERTER
The analog-to-digital (A/D) system, a successive approximation converter, uses an all-
capacitive charge redistribution technique to convert analog signals to digital values.
10.1 Overview
The A/D system is an 8-channel, 8-bit, multiplexed-input converter. The AV
DD
pin is
used to input supply voltage to the A/D converter. This allows the supply voltage to be
bypassed independently. The converter does not require external sample and hold cir-
cuits because of the type of charge redistribution technique used. A/D converter timing
can be synchronized to the system E clock, or to an internal resistor capacitor (RC)
oscillator. The A/D converter system consists of four functional blocks: multiplexer, an-
alog converter, digital control, and result storage. Refer to Figure 10-1.
10.1.1 Multiplexer
The multiplexer selects one of 16 inputs for conversion. Input selection is controlled by
the value of bits CD≠CA in the ADCTL register. The eight port E pins are fixed-direc-
tion analog inputs to the multiplexer, and internal analog signal lines are routed to it.

MOTOROLA
ANALOG-TO-DIGITAL CONVERTER
MC68HC11F1
10-2
TECHNICAL DATA
Figure 10-1 A/D Converter Block Diagram
Port E pins can also be used as digital inputs. Reads of port E pins are not recom-
mended during the sample portion of an A/D conversion cycle, when the gate signal
to the N-channel input gate is on. Because no P-channel devices are directly connect-
ed to either input pins or reference voltage pins, voltages above V
DD
do not cause a
latchup problem, although current should be limited according to maximum ratings.
Refer to Figure 10-2, which is a functional diagram of an input pin.
PE0/
AN0
PE1/
AN1
PE2/
AN2
PE3/
AN3
PE4/
AN4
PE5/
AN5
PE6/
AN6
PE7/
AN7
ANALOG
MUX
8-BIT CAPACITIVE DAC
WITH SAMPLE AND HOLD
SUCCESSIVE APPROXIMATION
REGISTER AND CONTROL
ADCTL A/D CONTROL
CB
CC
CD
MULT
SCAN
CCF
CA
ADDR 3 A/D RESULT 3
RESULT REGISTER INTERFACE
RESULT
INTERNAL
DATA BUS
V
RH
V
RL
ADDR 4 A/D RESULT 4
ADDR 2 A/D RESULT 2
ADDR 1 A/D RESULT 1

MC68HC11F1
ANALOG-TO-DIGITAL CONVERTER
MOTOROLA
TECHNICAL DATA
10-3
Figure 10-2 Electrical Model of an A/D Input Pin (Sample Mode)
10.1.2 Analog Converter
Conversion of an analog input selected by the multiplexer occurs in this block. It con-
tains a digital-to-analog capacitor (DAC) array, a comparator, and a successive ap-
proximation register (SAR). Each conversion is a sequence of eight comparison
operations, beginning with the most significant bit (MSB). Each comparison deter-
mines the value of a bit in the successive approximation register.
The DAC array performs two functions. It acts as a sample and hold circuit during the
entire conversion sequence, and provides comparison voltage to the comparator dur-
ing each successive comparison.
The result of each successive comparison is stored in the SAR. When a conversion
sequence is complete, the contents of the SAR are transferred to the appropriate re-
sult register.
A charge pump provides switching voltage to the gates of analog switches in the mul-
tiplexer. Charge pump output must stabilize between 7 and 8 volts, thus a delay of up
to 100
µ
s must be imposed after setting ADPU before the converter can be used. The
charge pump is enabled by the ADPU bit in the OPTION register.
Power is provided to the A/D converter system through the AV
DD
and AV
SS
pins.
10.1.3 Digital Control
All A/D converter operations are controlled by bits in register ADCTL. In addition to se-
lecting the analog input to be converted, ADCTL bits indicate conversion status, and
control whether single or continuous conversions are performed. Finally, the ADCTL
bits determine whether conversions are performed on single or multiple channels.
10.1.4 Result Registers
Four 8-bit registers (ADR1≠ADR4) store conversion results. Each of these registers
can be accessed by the processor in the CPU. The conversion complete flag (CCF)
DAC
CAPACITANCE
V
RL
ANALOG
INPUT
PIN
~
20 pF
+
~
20 V
≠
~
0.7 V
< 2 pF
INPUT
PROTECTION
DEVICE
400 nA
JUNCTION
LEAKAGE
DIFFUSION AND
POLY COUPLER
4 k
*
This analog switch is closed only during the 12-cycle sample time.
*

MOTOROLA
ANALOG-TO-DIGITAL CONVERTER
MC68HC11F1
10-4
TECHNICAL DATA
indicates when valid data is present in the result registers. The result registers are writ-
ten during a portion of the system clock cycle when reads do not occur, so there is no
conflict.
10.1.5 A/D Converter Clocks
The CSEL bit in the OPTION register selects whether the A/D converter uses the sys-
tem E clock or an internal RC oscillator for synchronization. When the A/D system is
operating with the MCU E clock, all switching and comparator functions are synchro-
nized to the MCU clocks. This allows the comparator results to be sampled at relatively
quiet clock times to minimize noise errors.
When E-clock frequency is below 750 kHz, charge leakage in the capacitor array can
cause errors, and the internal oscillator should be used. The RC clock is asynchronous
to the MCU internal E clock. Therefore, when the RC clock is used, additional errors
can occur because the comparator is sensitive to the additional system clock noise.
10.1.6 Conversion Sequence
A/D converter operations are performed in sequences of four conversions each. A
conversion sequence can repeat continuously or stop after one iteration. The conver-
sion complete flag (CCF) is set after the fourth conversion in a sequence to show the
availability of data in the result registers. Figure 10-3 shows the timing of a typical se-
quence. Synchronization is referenced to the system E clock.
Figure 10-3 A/D Conversion Sequence
MSB
4
CYCLES
E CLOCK
WRITE
BIT 6
2
CYC
BIT 5
2
CYC
BIT 4
2
CYC
BIT 3
2
CYC
BIT 2
2
CYC
BIT 1
2
CYC
LSB
2
CYC
END
12 E CYCLES
SAMPLE ANALOG INPUT
SUCCESSIVE APPROXIMATION SEQUENCE
2
CYC
CONVERT FOURTH
CHANNEL
AND UPDATE ADDR4
CONVERT THIRD
CHANNEL
AND UPDATE ADDR3
CONVERT SECOND
CHANNEL
AND UPDATE ADDR2
CONVERT FIRST
CHANNEL
AND UPDATE ADDR1
SET
REPEAT
E
CYCLES
128
96
64
32
0
TO
ADCTL
SEQUENCE
IF
SCAN = 1
CCF
FLAG

MC68HC11F1
ANALOG-TO-DIGITAL CONVERTER
MOTOROLA
TECHNICAL DATA
10-5
10.2 A/D Converter Power-Up and Clock Select
Bit 7 of the OPTION register controls A/D converter power up. Clearing ADPU re-
moves power from and disables the A/D converter system. Setting ADPU enables the
A/D converter system. Stabilization of the analog bias voltages requires a delay of as
much as 100
µ
s after turning on the A/D converter. When the A/D converter system is
operating with the MCU E clock, all switching and comparator operations are synchro-
nized to the MCU clocks. This allows the comparator results to be sampled at quiet
times, which minimizes noise errors. The internal RC oscillator is asynchronous to the
MCU clock, so noise affects A/D converter results, which lowers accuracy slightly
while CSEL = 1.
*Can be written only once in first 64 cycles out of reset in normal modes, or at any time in special modes
ADPU -- A/D Power-Up
0 = A/D powered down
1 = A/D powered up
CSEL -- Clock Select
0 = A/D and EEPROM use system E clock
1 = A/D and EEPROM use internal RC clock
IRQE -- Configure IRQ for Edge-Sensitive Only Operation
Refer to SECTION 5 RESETS AND INTERRUPTS.
DLY -- Enable Oscillator Start-up Delay
Refer to SECTION 5 RESETS AND INTERRUPTS.
CME -- Clock Monitor Enable
Refer to SECTION 5 RESETS AND INTERRUPTS.
FCME -- Force Clock Monitor Enable
Refer to SECTION 5 RESETS AND INTERRUPTS.
CR[1:0] -- COP Timer Rate Select Bits
Refer to SECTION 5 RESETS AND INTERRUPTS and SECTION 9 TIMING SYS-
TEM.
10.3 Conversion Process
The A/D conversion sequence begins one E-clock cycle after a write to the A/D control/
status register, ADCTL. The bits in ADCTL select the channel and the mode of con-
version.
An input voltage equal to V
RL
converts to $00 and an input voltage equal to V
RH
con-
verts to $FF (full scale), with no overflow indication. For ratiometric conversions of this
type, the source of each analog input should use V
RH
as the supply voltage and be
referenced to V
RL
.
OPTION -- System Configuration Options
$1039
Bit 7
6
5
4
3
2
1
Bit 0
ADPU
CSEL
IRQE*
DLY*
CME
FCME*
CR1*
CR0*
RESET:
0
0
0
1
0
0
0
0

MOTOROLA
ANALOG-TO-DIGITAL CONVERTER
MC68HC11F1
10-6
TECHNICAL DATA
10.4 Channel Assignments
The multiplexer allows the A/D converter to select one of sixteen analog signals. Eight
of these channels correspond to port E input lines, four of the channels are internal
reference points or test functions, and four channels are reserved. Refer to Table 10-
1.
*Used for factory testing
10.5 Single-Channel Operation
There are two types of single-channel operation. When SCAN = 0, the first type, the
single selected channel is converted four consecutive times. The first result is stored
in A/D result register 1 (ADR1), and the fourth result is stored in ADR4. After the fourth
conversion is complete, all conversion activity is halted until a new conversion com-
mand is written to the ADCTL register. In the second type of single-channel operation,
SCAN = 1, conversions continue to be performed on the selected channel with the fifth
conversion being stored in register ADR1 (overwriting the first conversion result), the
sixth conversion overwriting ADR2, and so on.
10.6 Multiple-Channel Operation
There are two types of multiple-channel operation. When SCAN = 0, the first type, a
selected group of four channels is converted one time each. The first result is stored
in A/D result register 1 (ADR1), and the fourth result is stored in ADR4. After the fourth
conversion is complete, all conversion activity is halted until a new conversion com-
mand is written to the ADCTL register. In the second type of multiple-channel opera-
tion, SCAN = 1, conversions continue to be performed on the selected group of
channels with the fifth conversion being stored in register ADR1 (replacing the earlier
conversion result for the first channel in the group), the sixth conversion overwriting
ADR2, and so on.
Table 10-1 A/D Converter Channel Assignments
Channel
Number
Channel
Signal
Result in ADRx if
MULT = 1
1
AN0
ADR1
2
AN1
ADR2
3
AN2
ADR3
4
AN3
ADR4
5
AN4
ADR1
6
AN5
ADR2
7
AN6
ADR3
8
AN7
ADR4
9
Reserved
--
10
Reserved
--
11
Reserved
--
12
Reserved
--
13
V
RH
*
ADR1
14
V
RL
*
ADR2
15
(V
RH
)/2*
ADR3
16
Reserved*
ADR4

MC68HC11F1
ANALOG-TO-DIGITAL CONVERTER
MOTOROLA
TECHNICAL DATA
10-7
10.7 Operation in STOP and WAIT Modes
If a conversion sequence is in progress when either the STOP or WAIT mode is en-
tered, the conversion of the current channel is suspended. When the MCU resumes
normal operation, that channel is resampled and the conversion sequence is resumed.
As the MCU exits the WAIT mode, the A/D circuits are stable and valid results can be
obtained on the first conversion. However, in STOP mode, all analog bias currents are
disabled and it is necessary to allow a stabilization period when leaving the STOP
mode. If the STOP mode is exited with a delay (DLY = 1), there is enough time for
these circuits to stabilize before the first conversion. If the STOP mode is exited with
no delay (DLY bit in OPTION register = 0), allow 10 ms for the A/D circuitry to stabilize
to avoid invalid results.
10.8 A/D Control/Status Registers
All bits in this register can be read or written, except CCF (bit 7), which is a read-only
status indicator, and bit 6, which always reads as zero. Write to ADCTL to initiate a
conversion. To quit a conversion in progress, write to this register and a new conver-
sion sequence begins immediately.
CCF -- Conversions Complete Flag
A read-only status indicator, this bit is set when all four A/D result registers contain val-
id conversion results. Each time the ADCTL register is overwritten, this bit is automat-
ically cleared to zero and a conversion sequence is started. In the continuous mode,
CCF is set at the end of the first conversion sequence.
Bit 6 -- Not implemented
Always reads zero
SCAN -- Continuous Scan Control
When this control bit is clear, the four requested conversions are performed once to
fill the four result registers. When this control bit is set, conversions continue in a
round-robin fashion with the result registers updated as data becomes available.
MULT -- Multiple Channel/Single Channel Control
When this bit is clear, the A/D converter system is configured to perform four consec-
utive conversions on the single channel specified by the four channel select bits CD≠
CA (bits [3:0] of the ADCTL register). When this bit is set, the A/D system is configured
to perform a conversion on each of four channels where each result register corre-
sponds to one channel.
ADCTL -- A/D Control/Status
$1030
Bit 7
6
5
4
3
2
1
Bit 0
CCF
--
SCAN
MULT
CD
CC
CB
CA
RESET:
1
0
I
I
I
I
I
I

MOTOROLA
ANALOG-TO-DIGITAL CONVERTER
MC68HC11F1
10-8
TECHNICAL DATA
NOTE
When the multiple-channel continuous scan mode is used, extra care
is needed in the design of circuitry driving the A/D inputs. The charge
on the capacitive DAC array before the sample time is related to the
voltage on the previously converted channel. A charge share situa-
tion exists between the internal DAC capacitance and the external
circuit capacitance. Although the amount of charge involved is small,
the rate at which it is repeated is every 64
µ
s for an E clock of 2 MHz.
The RC charging rate of the external circuit must be balanced against
this charge sharing effect to avoid errors in accuracy. Refer to
M68HC11 Reference Manual (M68HC11RM/AD) for further informa-
tion.
CD≠CA -- Channel Selects D≠A
Refer to Table 10-2. When a multiple channel mode is selected (MULT = 1), the two
least significant channel select bits (CB and CA) have no meaning and the CD and CC
bits specify which group of four channels is to be converted.
*Used for factory testing
10.9 A/D Converter Result Registers
These read-only registers hold an 8-bit conversion result. Writes to these registers
have no effect. Data in the A/D converter result registers is valid when the CCF flag in
the ADCTL register is set, indicating a conversion sequence is complete. If conversion
results are needed sooner, refer to Figure 10-3, which shows the A/D conversion se-
quence diagram.
Table 10-2 A/D Converter Channel Selection
Channel Select
Control Bits
Channel Signal
Result in ADRx if
MULT = 1
CD:CC:CB:CA
0000
AN0
ADR1
0001
AN1
ADR2
0010
AN2
ADR3
0011
AN3
ADR4
0100
AN4
ADR1
0101
AN5
ADR2
0110
AN6
ADR3
0111
AN7
ADR4
1000
Reserved
--
1001
Reserved
--
1010
Reserved
--
1011
Reserved
--
1100
V
RH
*
ADR1
1101
V
RL
*
ADR2
1110
(V
RH
)/2*
ADR3
1111
Reserved*
ADR4

MC68HC11F1
ANALOG-TO-DIGITAL CONVERTER
MOTOROLA
TECHNICAL DATA
10-9
ADR1≠ADR4 -- A/D Results
$1031≠$1034
$1031
Bit 7
6
5
4
3
2
1
Bit 0
ADR1
$1032
Bit 7
6
5
4
3
2
1
Bit 0
ADR2
$1033
Bit 7
6
5
4
3
2
1
Bit 0
ADR3
$1034
Bit 7
6
5
4
3
2
1
Bit 0
ADR4

MOTOROLA
ANALOG-TO-DIGITAL CONVERTER
MC68HC11F1
10-10
TECHNICAL DATA

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-1
APPENDIX A ELECTRICAL CHARACTERISTICS
This appendix contains electrical parameters for the MC68HC11F1 microcontroller.
*One pin at a time, observing maximum power dissipation limits.
Internal circuitry protects the inputs against damage caused by high static voltages or
electric fields; however, normal precautions are necessary to avoid application of any
voltage higher than maximum-rated voltages to this high-impedance circuit. Extended
operation at the maximum ratings can adversely affect device reliability. Tying unused
inputs to an appropriate logic voltage level (either GND or V
DD
) enhances reliability of
operation.
Table A-1 Maximum Ratings
Rating
Symbol
Value
Unit
Supply Voltage
V
DD
≠ 0.3 to + 7.0
V
Input Voltage
V
in
≠ 0.3 to + 7.0
V
Operating Temperature Range
MC68HC11F1
MC68HC11F1C
MC68HC11F1V
MC68HC11F1M
T
A
T
L
to T
H
0 to + 70
≠ 40 to + 85
≠ 40 to + 105
≠ 40 to + 125
∞
C
Storage Temperature Range
T
stg
≠ 55 to + 150
∞
C
Current Drain per Pin*
Excluding V
DD
, V
SS
, AV
DD
, V
RH
, and V
RL
I
D
25
mA

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-2
TECHNICAL DATA
NOTES:
1 This is an approximate value, neglecting P
I/O
.
2. For most applications P
I/O
´ P
INT
and can be neglected.
3. K is a constant pertaining to the device. Solve for K with a known T
A
and a measured P
D
(at equilibrium. Use
this value of K to solve for P
D
and T
J
iteratively for any value of T
A
Table A-2 Thermal Characteristics
Characteristic
Symbol
Value
Unit
Average Junction Temperature
T
J
T
A
+ (P
D
x Q
JA
)
∞
C
Ambient Temperature
T
A
User-determined
∞
C
Package Thermal Resistance (Junction-to-Ambient)
68-Pin Plastic Leaded Chip Carrier
80-Pin Low Profile Quad Flat Pack (LQFP, 1.4 mm Thick)
Q
JA
50
80
∞
C/W
∞
C/W
Total Power Dissipation
(Note 1)
P
D
P
INT
+ P
I/O
K / (T
J
+ 273
∞
C)
W
Device Internal Power Dissipation
P
INT
I
DD
x V
DD
W
I/O Pin Power Dissipation
(Note 2)
P
I/O
User-determined
W
A Constant
(Note 3)
K
P
D
x (T
A
+ 273
∞
C) +
Q
JA
x P
D
2
W x
∞
C

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-3
NOTES:
1. V
OH
specification for RESET and MODA is not applicable because they are open-drain pins. V
OH
specification
not applicable to ports C and D in wired-OR mode.
2. Refer to A/D specification for leakage current for port E.
3. EXTAL is driven with a square wave, and
t
cyc
= 500 ns for 2 MHz rating;
t
cyc
= 333 ns for 3 MHz rating;
t
cyc
= 250 ns for 4 MHz rating;
V
IL
0.2 V; V
IH
V
DD
≠ 0.2 V; No dc loads.
Table A-3 DC Electrical Characteristics
V
DD
= 5.0 Vdc
±
5%, V
SS
= 0 Vdc, T
A
= T
L
to T
H
, unless otherwise noted
Characteristic
Symbol Min
Max
Unit
Output Voltage (Note 1)
All Outputs except XTAL
All Outputs Except XTAL, RESET, and MODA
I
Load
=
±
10.0
µ
A
V
OL
V
OH
--
V
DD
≠ 0.1
0.1
--
V
V
Output High Voltage (Note 1)
All Outputs Except XTAL, RESET, and MODA
I
Load
= ≠ 0.8 mA, V
DD
= 4.5 V
V
OH
V
DD
≠ 0.8
--
V
Output Low Voltage
All Outputs Except XTAL
I
Load
= 1.6 mA
V
OL
-- 0.4
V
Input High Voltage
All Inputs Except RESET
RESET
V
IH
0.7 x V
DD
0.8 x V
DD
V
DD
+ 0.3
V
DD
+ 0.3
V
V
Input Low Voltage
All Inputs
V
IL
V
SS
≠ 0.3
0.2 x V
DD
V
I/O Ports, Three-State Leakage
Ports A, B, C, D, F, G
V
in
= V
IH
or V
IL
MODA/LIR, RESET
I
OZ
--
±
10
µ
A
Input Leakage Current (Note 2)
V
in
= V
DD
or V
SS
IRQ, XIRQ on standard devices
V
in
= V
DD
or V
SS
MODB/V
STBY
,
XIRQ on EPROM devices
I
in
--
--
±
1
±
10
µ
A
µ
A
Input Current with Pull-Up Resistors
V
in
= V
IL
Ports B, F, and G
l
ipr
100
500
µ
A
RAM Standby Voltage
Power down
V
SB
4.0
V
DD
V
RAM Standby Current
Power down
I
SB
-- 20
µ
A
Input Capacitance
PE[7:0], IRQ, XIRQ, EXTAL
Ports A, B, C, D, F, G, MODA/LIR, RESET
C
in
--
--
8
12
pF
pF
Output Load Capacitance
All Outputs Except PD[4:1],
4XOUT, XTAL, MODA/LIR
PD[4:1]
4XOUT
C
L
--
--
--
90
200
30
pF
pF
pF
Characteristic
Symbol
2 MHz
3 MHz
4 MHz
Unit
Maximum Total Supply Current (Note 3)
RUN:
Expanded Mode
WAIT: (All Peripheral Functions Shut Down)
Expanded Mode
STOP:
No Clocks, Expanded Mode
I
DD
W
IDD
S
IDD
27
15
50
38
20
50
50
25
50
mA
mA
µ
A
Maximum Power Dissipation
Expanded Mode
P
D
149
209
275
mW

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-4
TECHNICAL DATA
Figure A-1 Test Methods
20% OF VDD
70% OF VDD
VDD ≠ 0.8 V
70% OF VDD
CLOCKS/
STROBES
INPUTS
SPEC TIMING
~VDD
SPEC
OUTPUTS
20% OF VDD
AC TESTING
~VDD
~VSS
~VSS
SPEC
NOTES:
1. Full test loads are applied during all DC electrical tests and AC timing measurements.
2. During AC timing measurements, inputs are driven to 0.4 volts and V
DD
≠ 0.8 volts while timing measurements are
taken at the 20% and 70% of VDD points.
CLOCKS/
STROBES
INPUTS
VDD ≠ 0.8 V
0.4 V
NOMINAL TIMING
20% OF VDD
70% OF VDD
VDD ≠ 0.8 V
0.4 V
~VDD
NOM
OUTPUTS
0.4 V
DC TESTING
~VDD
~VSS
~VSS
NOM
20% OF VDD
0.4 V
20% OF VDD
70% OF VDD
20% OF VDD
70% OF VDD

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-5
NOTES:
1. All timing is shown with respect to 20% V
DD
and 70% V
DD
, unless otherwise noted.
2. RESET is recognized during the first clock cycle it is held low. Internal circuitry then drives the pin low for four
clock cycles, releases the pin, and samples the pin level two cycles later to determine the source of the interrupt.
Refer to SECTION 5 RESETS AND INTERRUPTS for further detail.
3. PW
RSTL
= 8 t
cyc
minimum on mask set C94R only.
Figure A-2 Timer Inputs
Table A-4 Control Timing
V
DD
= 5.0 Vdc
±
5%, V
SS
= 0 Vdc, T
A
= T
L
to T
H
Characteristic
Symbol
2.0 MHz
3.0 MHz
4.0 MHz
Unit
Min
Max
Min
Max
Min
Max
Frequency of Operation
f
o
dc
2.0
dc
3.0
dc
4.0
MHz
E-Clock Period
t
cyc
500
--
333
--
250
--
ns
Crystal Frequency
f
XTAL
--
8.0
--
12.0
--
16.0
MHz
External Oscillator Frequency
4 f
o
dc
8.0
dc
12.0
dc
16.0
MHz
Processor Control Setup Time
t
PCSU
= 1/4 t
cyc
+ 50 ns
t
PCSU
175
--
133
--
113
--
ns
Reset Input Pulse Width (Notes 2, 3)
(To Guarantee External Reset Vector)
(Minimum Input Time;
Can Be Preempted by Internal Reset)
PW
RSTL
16
1
--
--
16
1
--
--
16
1
--
--
t
cyc
t
cyc
Mode Programming Setup Time
t
MPS
2
--
2
--
2
--
t
cyc
Mode Programming Hold Time
t
MPH
10
--
10
--
10
--
ns
Interrupt Pulse Width, IRQ Edge-Sensitive Mode
PW
IRQ
= t
cyc
+ 20 ns
PW
IRQ
520
--
353
--
270
--
ns
Wait Recovery Startup Time
t
WRS
--
4
--
4
--
4
t
cyc
Timer Pulse Width, Input Capture Pulse Accumulator
Input
PW
TIM
= t
cyc
+ 20 ns
PW
TIM
520
--
353
--
270
--
ns
NOTES:
1. Rising edge sensitive input.
2. Falling edge sensitive input.
3. Maximum pulse accumulator clocking rate is E-clock frequency divided by 2.
PA7
2,3
PA7
1,3
PA[3:0]
2
PA[3:0]
1
PWTIM

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-6
TECHNICAL DATA
Figure A-3 POR External Reset Timing Diagram
t
PCSU
ADDRESS
MODA, MODB
E
EXTAL
V
DD
RESET
4064
t
CYC
FFFE
FFFE
FFFE
NEW
PC
FFFE
FFFF
FFFE
FFFE
FFFE
NEW
PC
FFFE
FFFF
FFFE
t
MPH
PW
RSTL
t
MPS

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-7
Figure A-4 STOP Recovery Timing Diagram
PW
IRQ
t
STOPDELAY
3
IRQ
1
IRQ
2
OR XIRQ
E
SP ≠ 8
SP ≠ 8
FFF2
(FFF4)
NEW
PC
ADDRESS
4
STOP
ADDR
STOP
ADDR + 1
STOP
ADDR + 1
STOP
ADDR + 1
STOP
ADDR
+
2
SP...SP≠7
FFF3
(FFF5)
OPCODE
RESUME PROGRAM WITH INSTR WHICH FOLLOWS THE STOP INSTR
NOTES:
1. Edge Sensitive IRQ
pin (IRQE bit = 1)
2. Level sensitive IRQ
pin (IRQE bit = 0)
3.
t
STOPDELAY
= 4064
t
CYC
if DLY bit = 1 or 4
t
CYC
if DLY = 0.
4. XIRQ
with X bit in CCR = 1.
5. IRQ
or (XIRQ
with X bit in CCR = 0).
INTERNAL
CLOCKS
ADDRESS
5
STOP
ADDR + 1
STOP
ADDR

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-8
TECHNICAL DATA
Figure A-5 WAIT Recovery from Interrupt Timing Diagram
t
PCSU
PCL PCH, YL, YH, XL, XH, A, B, CCR
STACK REGISTERS
E
R/W
ADDRESS
WAIT
ADDR
WAIT
ADDR
+
1
IRQ
, XIRQ
,
OR INTERNAL
INTERRUPTS
NOTE: RESET
also causes recovery from WAIT.
SP
SP ≠ 1
SP ≠ 2...SP ≠ 8
SP ≠ 8
SP ≠ 8...SP ≠ 8
SP ≠ 8
SP ≠ 8
SP ≠ 8
VECTOR
ADDR
VECTOR
ADDR
+
1
NEW
PC
t
WRS

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-9
Figure A-6 Interrupt Timing Diagram
E
PW
IRQ
SP ≠ 8
SP ≠ 8
ADDRESS
NEW
PC
NEXT
OPCODE
NEXT
OP + 1
IRQ
1
VECTOR
ADDR
SP ≠ 7
t
PCSU
IRQ
2 , XIRQ
OR INTERNAL
INTERRUPT
SP
SP ≠ 1
SP ≠ 2
SP ≠ 3
SP ≠ 4
SP ≠ 5
SP ≠ 6
VECTOR
ADDR
+
1
OP
CODE
≠ ≠
NOTES:
1. Edge sensitive IRQ
pin (IRQE bit = 1).
2. Level sensitive IRQ
pin (IRQE bit = 0).
DATA
PCL
PCH
IYL
IYH
IXL
IXH
B
A
CCR
≠ ≠
VECT
MSB
VECT
LSB
OP
CODE
R/W

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-10
TECHNICAL DATA
NOTES:
1. Ports C, D, and G timing is valid for active drive (CWOM, DWOM, and GWOM bits cleared).
2. All timing is shown with respect to 20% V
DD
and 70% V
DD
, unless otherwise noted.
Figure A-7 Port Read Timing Diagram
Figure A-8 Port Write Timing Diagram
Table A-5 Peripheral Port Timing
V
DD
= 5.0 Vdc
±
5%, V
SS
= 0 Vdc, T
A
= T
L
to T
H
Characteristic
Symbol
2.0 MHz
3.0 MHz
4.0 MHz
Unit
Min
Max
Min
Max
Min
Max
Frequency of Operation (E-Clock Frequency)
f
o
dc
2.0
dc
3.0
dc
4.0
MHz
E-Clock Period
t
cyc
500
--
333
--
250
--
ns
Peripheral Data Setup Time
(MCU Read of Ports A, C, D, E, G)
t
PDSU
100
--
100
--
100
--
ns
Peripheral Data Hold Time
(MCU Read of Ports A, C, D, E, G)
t
PDH
50
--
50
--
50
--
ns
Delay Time, Peripheral Data Write
(MCU Write to Port A)
(MCU Write to Ports B, C, D, F, and G
t
PWD
= 1/4 t
cyc
+ 100 ns)
t
PWD
--
--
200
225
--
--
200
183
--
--
200
162
ns
E
MCU READ OF PORT
t
PDSU
PORTS A, C, D, F
PORTS B, E, G
t
PDH
t
PDSU
t
PDH
t
PWD
E
MCU WRITE TO PORT
PREVIOUS PORT DATA
PREVIOUS PORT DATA
NEW DATA VALID
NEW DATA VALID
PORTS C, D, F
PORTS A, B, G
t
PWD
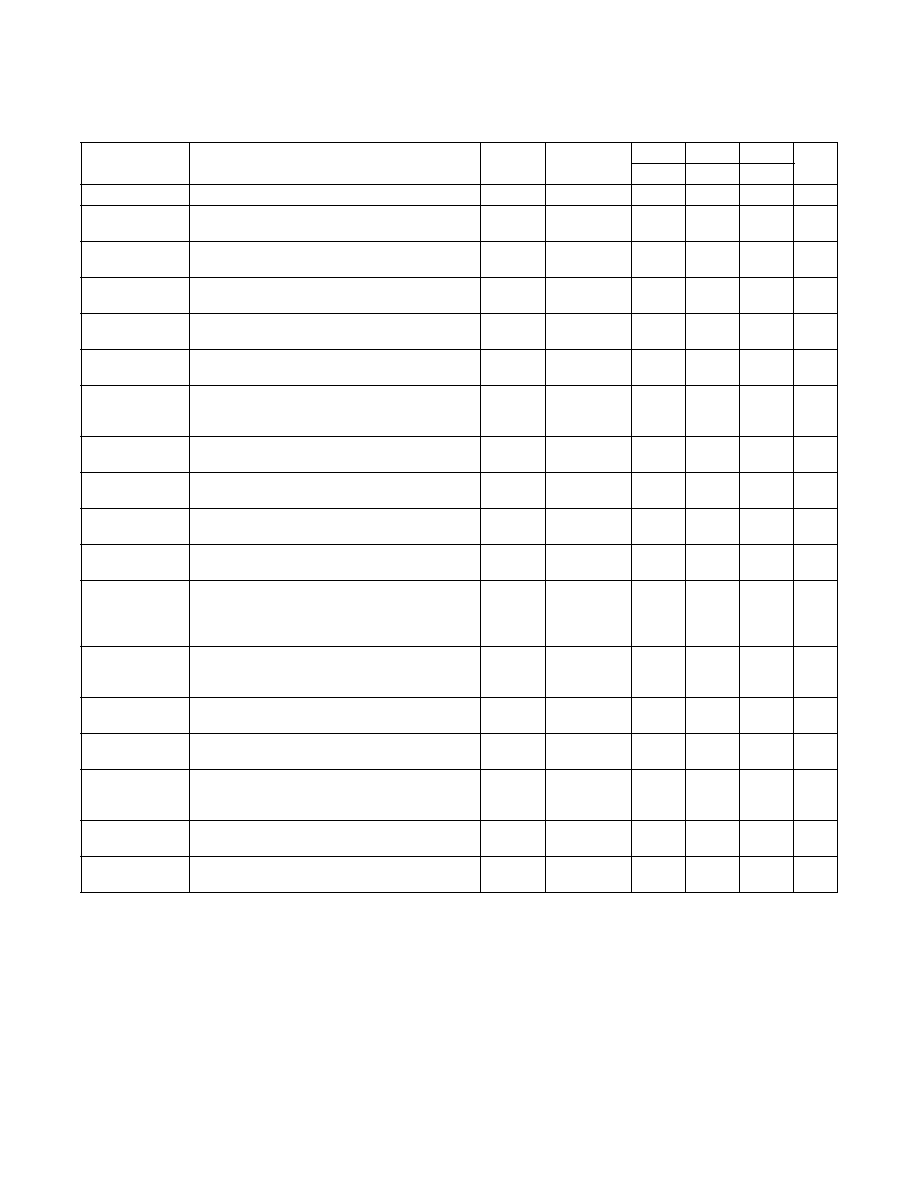
MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-11
NOTES:
1. For f
op
< 2 MHz, source impedances should equal approximately 10 k
. For f
op
2 MHz, source impedances
should equal approximately 5 k
≠ 10 k
. Source impedances greater than 10 k
affect accuracy adversely be-
cause of input leakage.
2. Performance verified down to 2.5 V
V
R
, but accuracy is tested and guaranteed at
V
R
= 5 V
±
10%
Table A-6 Analog-To-Digital Converter Characteristics
V
DD
= 5.0 Vdc
±
5%, V
SS
= 0 Vdc, T
A
= T
L
to T
H
, 750 kHz
E
3.0 MHz, unless otherwise noted
Characteristic
Parameter
Min
Absolute
2.0 MHz 3.0 MHz 4.0 MHz Unit
Max
Max
Max
Resolution
Number of Bits Resolved by A/D Converter
--
8
--
--
--
Bits
Non-Linearity
Maximum Deviation from the Ideal A/D Transfer
Characteristics
--
--
±
1
±
1
±
1
LSB
Zero Error
Difference Between the Output of an Ideal and
an Actual for Zero Input Voltage
--
--
±
1
±
1
±
1
LSB
Full Scale Error
Difference Between the Output of an Ideal and
an Actual A/D for Full-Scale Input Voltage
--
--
±
1
±
1
±
1
LSB
Total Unadjusted
Error
Maximum Sum of Non-Linearity, Zero Error, and
Full-Scale Error
--
--
±
1/2
±
1 1/2
±
1 1/2
LSB
Quantization
Error
Uncertainty Because of Converter Resolution
--
--
±
1/2
±
1/2
±
1/2
LSB
Absolute
Accuracy
Difference Between the Actual Input Voltage and
the Full-Scale Weighted Equivalent of the Binary
Output Code, All Error Sources Included
--
--
±
1
±
2
±
2
LSB
Conversion
Range
Analog Input Voltage Range
V
RL
--
V
RH
V
RH
V
RH
V
V
RH
Maximum Analog Reference Voltage
(Note 2)
V
RL
--
V
DD
+
0.1
V
DD
+
0.1
V
DD
+
0.1
V
V
RL
Minimum Analog Reference Voltage
(Note 2)
V
SS
≠0.1
--
V
RH
V
RH
V
RH
V
V
R
Minimum Difference between V
RH
and V
RL
(Note 2)
3
--
--
--
--
V
Conversion
Time
Total Time to Perform a Single
Analog-to-Digital Conversion:
E Clock
Internal RC Oscillator
--
--
32
--
--
t
cyc
+ 32
--
t
cyc
+ 32
--
t
cyc
+ 32
t
cyc
µ
s
Monotonicity
Conversion Result Never Decreases with an
Increase in Input Voltage and has no Missing
Codes
Guaranteed
Zero Input
Reading
Conversion Result when V
in
= V
RL
00
--
--
--
--
Hex
Full Scale
Reading
Conversion Result when V
in
= V
RH
--
--
FF
FF
FF
Hex
Sample
Acquisition Time
Analog Input Acquisition Sampling Time:
E Clock
Internal RC Oscillator
--
--
12
--
--
12
--
12
--
12
t
cyc
µ
s
Sample/Hold
Capacitance
Input Capacitance during Sample PE[7:0]
--
20 (Typ)
--
--
--
pF
Input Leakage
Input Leakage on A/D Pins
PE[7:0]
V
RL
, V
RH
--
--
--
--
400
1.0
400
1.0
400
1.0
nA
µ
A

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-12
TECHNICAL DATA
NOTES:
1. Input clocks with duty cycles other than 50% affect bus performance.
2. Indicates a parameter affected by clock stretching. Add n(t
cyc
) to parameter value, where:
n = 1, 2, or 3 depending on values written to CSSTRH register.
3. All timing is shown with respect to 20% V
DD
and 70% V
DD
, unless otherwise noted.
Table A-7 Expansion Bus Timing
V
DD
= 5.0 Vdc
±
5%, V
SS
= 0 Vdc, T
A
= T
L
to T
H
Num
Characteristic
Symbol
2.0 MHz
3.0 MHz
4.0 MHz
Unit
Min
Max
Min
Max
Min
Max
Frequency of Operation (E-Clock Frequency)
f
o
dc
2.0
dc
3.0
dc
4.0
MHz
1
Cycle Time
t
cyc
= 1/f
o
t
cyc
500
--
333
--
250
--
ns
2
Pulse Width, E Low
PW
EL
= 1/2 t
cyc
≠ 20 ns
PW
EL
230
--
147
--
105
--
ns
3
Pulse Width, E High
PW
EH
= 1/2 t
cyc
≠ 25 ns
(Note 2)
PW
EH
225
--
142
--
100
--
ns
4A
4B
E Clock
Rise Time
Fall Time
t
r
t
f
--
--
20
20
--
--
20
18
--
--
20
15
ns
ns
9
Address Hold Time
t
AH
= 1/8 t
cyc
≠ 10 ns
t
AH
53
--
32
--
21
--
ns
11
Address Delay Time
t
AD
= 1/8 t
cyc
+ 40 ns
t
AD
--
103
--
82
--
71
ns
12
Address Valid Time to E Rise
t
AV
= PW
EL
≠ t
AD
t
AV
128
--
65
--
34
--
ns
17
Read Data Setup Time
t
DSR
30
--
30
--
20
--
ns
18
Read Data Hold Time
t
DHR
0
--
0
--
0
--
ns
19
Write Data Delay Time
t
DDW
--
40
--
40
--
40
ns
21
Write Data Hold Time
t
DHW
= 1/8 t
cyc
t
DHW
63
--
42
--
31
--
ns
29
MPU Address Access Time
t
ACCA
= t
cyc
≠ t
f
≠ t
DSR
≠ t
AD
(Note 2)
t
ACCA
348
--
203
--
144
--
ns
39
Write Data Setup Time
t
DSW
= PW
EH
≠ t
DDW
(Note 2)
t
DSW
185
--
102
--
60
--
ns
50
E Valid Chip Select Delay Time
t
ECSD
--
40
--
40
--
40
ns
51
E Valid Chip Select Access Time
t
ECSA
= PW
EH
≠ t
ECSD
≠ t
DSR
(Note 2)
t
ECSA
155
--
72
--
40
--
ns
52
Chip Select Hold Time
t
CH
0
20
0
20
0
20
ns
54
Address Valid Chip Select Delay Time
t
ACSD
= 1/4 t
cyc
+ 40 ns
t
ACSD
--
165
--
123
--
103
ns
55
Address Valid Chip Select Access Time
t
ACSA
= t
cyc
≠ t
f
≠ t
DSR
≠ t
ACSD
(Note 2)
t
ACSA
285
--
162
--
113
--
ns
56
Address Valid to Chip Select Time
t
AVCS
10
--
10
--
10
--
ns
57
Address Valid to Data Three-State Time
t
AVDZ
--
10
--
10
--
10
ns

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-13
Figure A-9 Expansion Bus Timing
E
CS E VALID
READ DATA
WRITE DATA
R/W, ADDRESS
CS AD VALID
12
11
4A
2
1
3
4B
9
17
18
21
39
29
19
57
56
54
55
51
50
52

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-14
TECHNICAL DATA
NOTES:
1. All timing is shown with respect to 20% V
DD
and 70% V
DD
, unless otherwise noted.
2. Signal production depends on software.
3. Assumes 200 pF load on all SPI pins.
Table A-8 Serial Peripheral Interface Timing
V
DD
= 5.0 Vdc
±
5%, V
SS
= 0 Vdc, T
A
= T
L
to T
H
Num
Characteristic
Symbol
2.0 MHz
3.0 MHz
4.0 MHz
Unit
Min
Max
Min
Max
Min
Max
Operating Frequency
Master
Slave
f
op(m)
f
op(s)
dc
dc
1.0
2.0
dc
dc
1.5
3.0
dc
dc
2.0
4.0
MHz
MHz
1
Cycle Time
Master
Slave
t
cyc(m)
t
cyc(s)
2.0
500
--
--
2.0
333
--
--
2.0
250
--
--
t
cyc
ns
2
Enable Lead Time
Master (Note
2)
Slave
t
lead(m)
t
lead(s)
--
250
--
--
--
240
--
--
--
200
--
--
ns
ns
3
Enable Lag Time
Master (Note
2)
Slave
t
lag(m)
t
lag(s)
--
250
--
--
--
240
--
--
--
200
--
--
ns
ns
4
Clock (SCK) High Time
Master
Slave
t
w(SCKH)m
t
w(SCKH)s
340
190
--
--
227
127
--
--
130
85
--
--
ns
ns
5
Clock (SCK) Low Time
Master
Slave
t
w(SCKL)m
t
w(SCKL)s
340
190
--
--
227
127
--
--
130
85
--
--
ns
ns
6
Data Setup Time (Inputs)
Master
Slave
t
su(m)
t
su(s)
100
100
--
--
100
100
--
--
100
100
--
--
ns
ns
7
Data Hold Time (Inputs)
Master
Slave
t
h(m)
t
h(s)
100
100
--
--
100
100
--
--
100
100
--
--
ns
ns
8
Access Time (Time to Data Active from
High-Impedance State)
Slave
t
a
0
120
0
120
0
120
ns
9
Disable Time (Hold Time to High-Impedance State)
Slave
t
dis
--
240
--
167
--
125
ns
10
Data Valid (After Enable Edge)
(Note 3)
t
v(s)
--
240
--
167
--
125
ns
11
Data Hold Time (Outputs) (After Enable Edge)
t
ho
0
--
0
--
0
--
ns
12
Rise Time (20% V
DD
to 70% V
DD
, C
L
= 200 pF)
SPI Outputs (SCK, MOSI, and MISO)
SPI Inputs (SCK, MOSI, MISO, and SS)
t
rm
t
rs
--
--
100
2.0
--
--
100
2.0
--
--
100
2.0
ns
µ
s
13
Fall Time (70% V
DD
to 20% V
DD
, C
L
= 200 pF)
SPI Outputs (SCK, MOSI, and MISO)
SPI Inputs (SCK, MOSI, MISO, and SS)
t
fm
t
fs
--
--
100
2.0
--
--
100
2.0
--
--
100
2.0
ns
µ
s

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-15
Figure A-10 SPI Master Timing (CPHA = 0)
Figure A-11 SPI Master Timing (CPHA = 1)
SEE
NOTE
NOTE: This first clock edge is generated internally but is not seen at the SCK pin.
SCK (CPOL = 0)
(OUTPUT)
SCK (CPOL = 1)
(OUTPUT)
MISO
(INPUT)
MOSI
(OUTPUT)
SS
(INPUT)
SEE
NOTE
MSB IN
BIT 6 - - - -1
LSB IN
MASTER MSB OUT
MASTER LSB OUT
BIT 6 - - - -1
SS IS HELD HIGH ON MASTER
10 (ref)
5
1
13
4
5
12
13
12
4
6
7
11
10
11 (ref)
12
13
NOTE: This last clock edge is generated internally but is not seen at the SCK pin.
SCK (CPOL = 0)
(OUTPUT)
SCK (CPOL = 1)
(OUTPUT)
MISO
(INPUT)
MOSI
(OUTPUT)
SS
(INPUT)
MSB IN
BIT 6 - - - -1
LSB IN
MASTER MSB OUT
MASTER LSB OUT
BIT 6 - - - -1
SS IS HELD HIGH ON MASTER
10 (ref)
1
13
4
5
12
12
13
4
6
7
11
10
11 (ref)
12
13
5
SEE
NOTE
SEE
NOTE

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-16
TECHNICAL DATA
Figure A-12 SPI Slave Timing (CPHA = 0)
Figure A-13 SPI Slave Timing (CPHA = 1)
NOTE: Not defined but normally MSB of character just received.
SCK (CPOL = 0)
(INPUT)
SCK (CPOL = 1)
(INPUT)
MISO
(OUTPUT)
MOSI
(INPUT)
SS
(INPUT)
MSB IN
BIT 6 - - - -1
LSB IN
SLAVE MSB OUT
SLAVE LSB OUT
BIT 6 - - - -1
1
13
4
5
12
12
4
13
9
10
11
5
3
6
7
11
8
SEE
NOTE
2
NOTE: Not defined but normally LSB of character previously transmitted.
SCK (CPOL = 0)
(INPUT)
SCK (CPOL = 1)
(INPUT)
MISO
(OUTPUT)
MOSI
(INPUT)
SS
(INPUT)
MSB IN
BIT 6 - - - -1
LSB IN
SLAVE MSB OUT
SLAVE LSB OUT
BIT 6 - - - -1
1
13
4
5
12
12
4
13
9
10
11
5
6
7
8
SEE
NOTE
2
10
3

MC68HC11F1
ELECTRICAL CHARACTERISTICS
MOTOROLA
TECHNICAL DATA
A-17
NOTES:
1. The RC oscillator (RCO) must be enabled (by setting the CSEL bit in the OPTION register) for EEPROM pro-
gramming and erasure when the E-clock frequency is below 1.0 MHz.
2. Refer to Reliability Monitor Report (current quarterly issue) for current failure rate information.
Table A-9 EEPROM Characteristics
V
DD
= 5.0 Vdc
±
10%, V
SS
= 0 Vdc, T
A
= T
L
to T
H
Characteristic
Temperature Range
Unit
0 to 70,
≠ 40 to 85
≠40 to 105
≠40 to 125
∞
C
Programming Time
<1.0 MHz, RCO Enabled
(Note 1)
1.0 to 2.0 MHz, RCO Disabled
2.0 MHz (or Anytime RCO Enabled)
10
20
10
15
Must use RCO
15
20
Must use RCO
20
ms
Erase Time (Note 1)
Byte, Row and Bulk
10
10
10
ms
Write/Erase Endurance (Note 2)
10,000
10,000
10,000
Cycles
Data Retention (Note 2)
10
10
10
Years

MOTOROLA
ELECTRICAL CHARACTERISTICS
MC68HC11F1
A-18
TECHNICAL DATA

MC68HC11F1
MOTOROLA
TECHNICAL DATA
B-1
APPENDIX BMECHANICAL DATA AND ORDERING INFORMATION
B.1 Pin Assignments
The MC68HC11F1 is available in the 80-pin plastic low profile quad flat pack (LQFP)
or the 68-pin plastic leaded chip carrier (PLCC). Refer to Table B-1 for ordering infor-
mation.
Figure B-1 MC68HC11F1 68-Pin PLCC
PG3
PG2
PG1
RESET
PC7/DATA7
PC6/DATA6
PC5/DATA5
PC4/DATA4
PC3/DATA3
PC2/DATA2
PC1/DATA1
IRQ
XIRQ
PG7/CSPROG
PG6/CSGEN
PG5/CSIO1
PG4/CSIO2
PB3/ADDR11
PB0/ADDR8
PB1/ADDR9
PB2/ADDR10
PB4/ADDR12
PB5/ADDR13
PB6/ADDR14
PE4/AN4
PE0/AN0
PF0/ADDR0
PF1/ADDR1
PF2/ADDR2
PF3/ADDR3
PF4/ADDR4
PF5/ADDR5
PF6/ADDR6
PF7/ADDR7
E
MODB/V
STBY
MODA/LIR
PC0/DATA0
EXTAL
XTAL
V
SS
R/W
4XOUT
PE7/AN7
PE3/AN3
PE6/AN6
PE2/AN2
PE5/AN5
PE1/AN1
V
RH
V
RL
PG0
PD3/MOSI
PD0/RxD
PD4/SCK
PD2/MISO
PD1/TxD
PD5/SS
PB7/ADDR15
PA4/OC4/OC1
PA5/OC3/OC1
PA6/OC2/OC1
PA7/PAI/OC1
V
DD
PA3/OC5/IC4/OC1
PA2/IC1
PA1/IC2
PA0/IC3
23
24
10
11
12
13
14
15
16
17
18
45
59
58
57
56
55
54
53
52
51
50
19
20
21
22
49
48
47
46
25
60
6
5
4
3
2
67
68
65
64
63
62
8
7
66
9
34
35
36
37
38
39
27
28
29
30
31
32
33
40
41
42
61
44
26
43
1
MC68HC11F1

MOTOROLA
MC68HC11F1
B-2
TECHNICAL DATA
Figure B-2 MC68HC11F1 80-Pin Quad Flat Pack
B.2 Package Dimensions
For case outlines please visit our website at http://design-net.sps.mot.com.
PA3/OC5/IC4/OC1
PA5/OC3/OC1
PA4/OC4/OC1
NC
PA1/IC2
PA0/IC3
V
DD
PA2/IC1
PB7/ADDR15
PD5/SS
PD4/SCK
PD3/MOSI
PD2/MISO
PD1/TxD
14
15
1
2
3
4
5
6
7
8
9
45
59
58
57
56
55
54
53
52
51
50
10
11
12
13
49
48
47
46
16
60
PF2/ADDR2
PF1/ADDR1
PB1/ADDR9
PB2/ADDR10
PB3/ADDR11
PB4/ADDR12
PB5/ADDR13
PB6/ADDR14
NC
NC
PF7/ADDR7
PB0/ADDR8
PF6/ADDR6
PF3/ADDR3
PC5/DATA5
PC7/DATA7
PC6/DATA6
PC4/DATA4
PC3/DATA3
NC
PG1
PG2
PG3
PG4/CSIO2
PG5/CSIO1
PG6/CSGEN
PG7/CSPROG
77
76
75
74
73
70
71
68
67
66
65
79
78
69
28
29
30
31
32
33
21
22
23
24
25
26
27
34
35
36
NC
PE2/AN2
NC
PE6/AN6
PE5/AN5
PE1/AN1
V
SS
V
RH
MODA/LIR
E
R/W
EXTAL
64
44
PC2/DATA2
PF0/ADDR0
17
XTAL
37
NC
72
63
62
61
PD0/RxD
PG0
NC
PC0/DATA0
NC
4XOUT
38
39
40
PE0/AN0
PE4/AN4
NC
18
19
20
PC1/DATA1
NC
43
42
41
80
MC68HC11F1
PA6/OC2/OC1
PA7/PAI/OC1
V
RL
MODB/V
STBY
PE7/AN7
PE3/AN3
PF5/ADDR5
PF4/ADDR4
IRQ
XIRQ
RESET
NC

MC68HC11F1
MOTOROLA
TECHNICAL DATA
B-3
B.3 Ordering Information
Use the information in Table B-1 to specify the appropriate device when placing an
order.
Table B-1 Device Ordering Information
Description
Package
Temperature
Frequency
MC Order Number
NO ROM,
80-Pin LQFP
≠ 40
∞
to + 85
∞
C
2 MHz
MC68HC11F1CPU2
512 Bytes EEPROM,
(14 mm X 14 mm,
3 MHz
MC68HC11F1CPU3
1024 Bytes RAM
1.4 mm thick)
4 MHz
MC68HC11F1CPU4
≠ 40
∞
to + 105
∞
C
2 MHz
MC68HC11F1VPU2
3 MHz
MC68HC11F1VPU3
4 MHz
MC68HC11F1VPU4
≠ 40
∞
to + 125
∞
C
2 MHz
MC68HC11F1MPU2
3 MHz
MC68HC11F1MPU3
68-Pin PLCC
≠ 40
∞
to + 85
∞
C
2 MHz
MC68HC11F1CFN2
3 MHz
MC68HC11F1CFN3
4 MHz
MC68HC11F1CFN4
≠ 40
∞
to + 105
∞
C
2 MHz
MC68HC11F1VFN2
3 MHz
MC68HC11F1VFN3
4 MHz
MC68HC11F1VFN4
≠ 40
∞
to + 125
∞
C
2 MHz
MC68HC11F1MFN2
3 MHz
MC68HC11F1MFN3

MOTOROLA
MC68HC11F1
B-4
TECHNICAL DATA

MC68HC11F1
MOTOROLA
TECHNICAL DATA
C-1
APPENDIX CDEVELOPMENT SUPPORT
C.1 MC68HC11F1 Development Tools
The following table and text provide a reference to development tools for the
MC68HC11F1 microcontrollers. For more complete information refer to the appropri-
ate manual for each system.
* For MC68HC11F1 support, the MMDS11 must be used with an MC68HC11F1 emulator module.
C.2 MC68HC11EVS -- Evaluation System
The EVS is an economical tool for designing, debugging, and evaluating target sys-
tems based on the MC68HC11F1 MCU. The two printed circuit boards that comprise
the EVS are the MC68HC11F1EM emulator module (EM) and the M68HC11PFB plat-
form board (PFB).
∑ Monitor/debugger firmware
∑ One-line assembler/disassembler
∑ Host computer download capability
∑ Dual memory maps:
-- 64 Kbyte monitor map that includes 16 Kbytes of monitor EPROM
-- MC68HC11F1 user map that includes 64 Kbytes of emulation RAM
∑ OTPROM, EPROM, and EEPROM MCU programmer
∑ MCU extension I/O port for single-chip, expanded, and special-test operation
modes
∑ RS-232C terminal and host I/O ports
∑ Logic analyzer connector
C.3 M68MMDS11 -- Modular Development System for M68HC11 Devices
The M68MMDS11 Motorola Modular Development System (MMDS11) is a tool for de-
veloping embedded systems based on M68HC11 MCUs. The MMDS11 is an emulator
system that provides an on-screen bus state analyzer and real-time memory monitor-
ing windows. An integrated design environment includes an editor, an assembler, the
user interface, and source-level debug capability. These features significantly reduce
the time necessary to develop and debug an embedded MCU system. The compact
unit requires minimum space.
∑ Real-time, non-intrusive, in-circuit emulation
∑ Assembly-language source-level debugging
Table C-1 MC68HC11F1 Development Tools
Device
Evaluation Systems
Modular Development Systems
MC68HC11F1
M68HC11F1EVS
MMDS11*

MOTOROLA
MC68HC11F1
C-2
TECHNICAL DATA
∑ Built-in real-time bus state analyzer:
-- 8 Kbyte x 64 real-time trace buffer
-- Four hardware triggers control real-time bus analysis, provide breakpoints
-- Nine triggering modes
-- Display of real-time trace data as raw data, disassembled instructions, raw
data and disassembled instructions, or assembly-language source code
-- As many as 8190 pre- or post-trigger points
-- Trace buffer can be filled while single-stepping through user software
-- 16-bit or 24-bit time tag
-- Programmable time tag clock source
-- 16 general-purpose logic clips, four can trigger bus state analyzer sequencer
∑ 64 Kbytes of emulation memory
∑ 32-byte block of real-time memory, can be mapped within a 1 Kbyte window any-
where in the 64 Kbyte M68HC11 memory map.
∑ Six software-selectable oscillator clock sources: five internally generated fre-
quencies or an external frequency on a logic clip
∑ 64 possible hardware instruction breakpoints over the 64 Kbyte M68HC11 mem-
ory map or a one megabyte bank selected memory map.
∑ Four data breakpoints (hardware breakpoints). A data breakpoint can be qualified
by an address, an address range, data, or clips.
∑ SCRIPT command for automatic execution of MMDS11 command sequences
∑ Command and response logging
∑ A DOS personality file for each EM that the MMDS supports. Each personality file
provides a foreground memory-map description and a chip information file.
∑ CHIPINFO command provides memory-map, vectors, registers, and pin-out infor-
mation contained in the personality file
∑ Latch-up resistant design makes power-up sequencing unimportant.
∑ RS-232 operation speeds as high as 57.6 Kbaud
∑ On-screen, context-sensitive help
∑ Mouse or keyboard control of software
∑ Built-in power supply
∑ Compact size: 15.38 inches (390.6 mm) deep, 10.19 inches (258.83 mm) wide,
and 2.75 inches (69.85 mm) high. Station module weighs 6.0 pounds (2.72 kg).