Document Outline
- COVER
- FEATURES
- ORDERING INFORMATION
- BLOCK DIAGRAM
- FUNCTIONAL PIN GROUPS
- PIN CONFIGURATION
- PIN IDENTIFICATION
- 1. PIN FUNCTIONS
- 1.1 Pin Functions
- 1.2 Recommended Connection for Unused Pins
- 2. FUNCTIONS
- 2.1 Pipeline Processing
- 2.1.1 Outline
- 2.1.2 Instructions with Delay
- 2.2 Program Control Unit
- 2.3 Operation Unit
- 2.3.1 General register (R0 to R7)
- 2.3.2 MAC: Multiply ACcumulator
- 2.3.3 ALU: Arithmetic Logic Unit
- 2.3.4 BSFT: Barrel ShiFTer
- 2.3.5 SAC: Shifter And Count Circuit
- 2.3.6 CJC: Condition Judge Circuit
- 2.4 Memory
- 2.4.1 Instruction RAM Outline
- 2.4.2 Data Memory Outline
- 2.4.3 Data Memory Addressing
- 2.5 On-chip Peripheral Circuit
- 2.5.1 Serial Interface Outline
- 2.5.2 Host Interface Outline
- 2.5.3 General Input/output Ports Outline
- 2.5.4 Wait Cycle Register
- 3. INSTRUCTIONS
- 3.1 Outline
- 3.2 Instruction Set and Operation
- 4. ELECTRICAL SPECIFICATIONS
- 5. PACKAGE DRAWING
- 6. RECOMMENDED SOLDERING CONDITIONS

MOS INTEGRATED CIRCUIT
µ
PD77016
16 bits, Fixed-point Digital Signal Processor
The information in this document is subject to change without notice.
µ
PD77016 is a 16 bits fixed-point DSP (Digital Signal Processor) developed for digital signal processing with its
demand for high speed and precision.
FEATURES
∑
FUNCTIONS
∑ Instruction cycle: 30 ns (MIN.) with 33 MHz clock
∑ Dual load/store
∑ Hardware loop function
∑ Conditional execution
∑ Executes product-sum operation in one instruction cycle
∑
PROGRAMMING
∑ 16 bits
◊
16 bits + 40 bits
40 bits multiply accumulator
∑ 8 general registers (40 bits each)
∑ 8 ROM/RAM data pointer: each data memory area has 4 registers
∑ 10 source interrupts (external: 4, internal: 6)
∑ 3 operand instructions (example: R0 = R0 +R1L
R2L)
∑ Nonpipeline on execution stage
∑
MEMORY AREAS
∑ Program memory area: 64K words
◊
32 bits
∑ Two independent data memory areas: 64K words
◊
16 bits (X/Y memory)
∑
ON-CHIP PERIPHERAL
∑ I/O port: 4 bits
∑ Serial I/O (16 bits): 2 channels
∑
CMOS
∑
+5 V single power supply
ORDERING INFORMATION
Part Number
Package
µ
PD77016GM-KMD
160-pin plastic QFP (FINE PITCH) (24
◊
24 mm)
The mark
shows major revised points.
Document No. U10891EJ5V0DS00 (5th edition)
Date Published April 1998 N CP(K)
Printed in Japan
©
1992, 1994, 1995
DATA SHEET

µ
PD77016
2
BLOCK DIAGRAM
Serial
I/O #1
Serial
I/O #2
Ports
Host I/O
X Memory
Data
Pointers
X Memory
2KW≠RAM
Y Memory
Data
Pointers
Y Memory
2KW≠RAM
Interrupt
Control
Loop
Control
Stack
PC Stack
CPU Control
MPY
16
◊
16 + 40
40
ALU (40)
R0≠R7
X≠Bus
Y≠Bus
External
Memory
INT1≠INT4
RESET CLKOUT CLKIN
Main Bus
Instruction
Memory
(1.5 KW≠RAM)
External Instruction Memory
WAIT
Wait
Controller
IE
I/O

µ
PD77016
3
FUNCTIONAL PIN GROUPS
SO1
SORQ1
SOEN1
SCK1
SI1
SIEN1
SIAK1
Serial
Interface #1
SO2
SORQ2
SOEN2
SCK2
SI2
SIEN2
SIAK2
Serial
Interface #2
HCS
HA0,HA1
HRD
HRE
HWR
HWE
HD0 - HD7
Host Interface
P0 - P3
Ports
(2)
(4)
(8)
V
DD
+5 V
GND
RESET
INT1
INT2
INT3
INT4
IA0 - IA15
ID0 - ID31
HOLDRQ
BSTB
X/Y
DA0 - DA15
D0 - D15
WAIT
MRD
MWR
HOLDAK
External Instruction
Memory
Data Bus Control
Interrupts
(16)
(32)
(16)
External Data Memory
(16)
(2)
(3)
TDO,TICE
TCK,TDI,TMS
CLKIN
CLKOUT
PWR
Debugging
Interface

µ
PD77016
4
Item
µ
PD77016
µ
PD77015
µ
PD77017
µ
PD77018
µ
PD77018A
µ
PD77019
µ
PD77019-013
Internal instruction RAM
1.5K words
256 words
4K words
Internal instruction ROM
None
4K words
12K words
24K words
None
External instruction memory
48K words
None
Data RAM (X/Y memory)
2K words each
1K words each
2K words each
3K words each
Data ROM (X/Y memory)
None
2K words each
4K words each
12K words each
None
External data memory
48K words each
16K words each
Instruction cycle
(Maximum operation speed)
External clock
(at maximum operation speed)
Crystal
(at maximum operation speed)
Instruction
≠
STOP instruction is added.
Serial interface (2 Channels)
Power supply
5V
3 V
Package
160-pin plastic QFP
100-pin plastic TQFP
100-pin plastic TQFP
100-pin plastic TQFP
116-pin plastic BGA
Functional Differences among the
µ
PD7701
◊
Family
Channel 1 has the
same functions
as channel 2.
Channel 1 has the same functions as that of the
µ
PD77016.
Channel 2 has no SORQ2 or SIAK2 pin (Channel 2 is used for CODEC connection).
33/16.5/8.25/4.125 MHz
Variable multiple rate (1, 2, 4, 8 ) by mask option.
66 MHz
60/30/20/15/7.5 MHz
Variable multiple rate (1, 2, 3, 4, 8 ) by
mask option.
60 MHz
30 ns (33 MHz)
16.6 ns (60 MHz)
≠
33 MHz
15 MHz
Multiple rate is
fixed to 4.
≠
Remark
The
µ
PD77019-013 internal ROM area is masked already by the void code to use as RAM based DSP without mask code ordering process.

µ
PD77016
5
PIN CONFIGURATION
µ
PD77016GM-KMD
160-pin plastic QFP (FINE PITCH) (24
◊
24 mm) (Top View)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
120
119
118
117
116
115
114
113
112
111
110
109
108
107
106
105
104
103
102
101
100
99
98
97
96
95
94
93
92
91
90
89
88
87
86
85
84
83
82
81
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
44
43
42
41
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
IA0
IA1
IA2
IA3
V
DD
GND
IA4
IA5
IA6
IA7
IA8
IA9
IA10
IA11
V
DD
GND
IA12
IA13
IA14
IA15
TMS
TDI
TCK
HD7
HA1
HA0
HWR
HRE
HD2
HD3
HD4
HD5
HD6
GND
HWE
V
DD
HD1
HD0
TIC
TDO
NC
ID0
ID1
ID2
ID3
ID4
ID5
ID6
ID7
V
DD
GND
ID8
ID9
ID10
ID11
ID12
ID13
ID14
ID15
V
DD
GND
ID16
ID17
ID28
ID29
ID30
ID31
ID23
PWR
ID24
ID25
ID26
ID27
ID21
ID22
ID20
GND
V
DD
ID18
ID19
D15
D14
D13
D12
GND
V
DD
D11
D10
D9
D8
D7
D6
D5
D4
GND
V
DD
D3
D2
D1
D0
GND
V
DD
SI1
SIEN2
SI2
HCS
HRD
SOEN1
SOEN2
SORQ2
SO2
SIAK2
SCK2
SO1
SORQ1
SIAK1
V
DD
GND
SIEN1
SCK1
RESET
INT4
INT3
INT2
INT1
WAIT
HOLDRQ
CLKIN
P3
P2
P1
P0
CLKOUT
GND
V
DD
MWR
MRD
BSTB
HOLDAK
X/Y
DA15
DA14
DA13
DA3
DA2
DA1
DA0
DA9
DA6
DA5
DA4
GND
V
DD
DA11
DA10
V
DD
DA7
DA8
DA12
GND
µ
PD77016
6
BSTB:
Bus Strobe
CLKIN:
Clock Input
CLKOUT:
Clock Output
D0-D15:
16 Bits Data Bus
DA0-DA15:
External Data Memory Address Bus
GND:
Ground
HA0,HA1:
Host Data Access
HCS:
Host Chip Select
HD0-HD7:
Host Data Bus
HOLDAK:
Hold Acknowledge
HOLDRQ:
Hold Request
HRD:
Host Read
HRE:
Host Read Enable
HWE:
Host Write Enable
HWR:
Host Write
IA0-IA15:
Instruction Memory Address Output
ID0-ID31:
Instruction Data Input
INT1-INT4:
Interrupt
MRD:
Memory Read Output
MWR:
Memory Write Output
N.C:
No Connection
P0-P3:
Port
PWR:
Program Memory Write Strobe
RESET:
Reset
SCK1,SCK2:
Serial Clock Input
SI1,SI2:
Serial Data Input
SIAK1,SIAK2:
Serial Input Acknowledge
SIEN1,SIEN2:
Serial Input Enable
SO1,SO2:
Serial Data Output
SOEN1,SOEN2: Serial Output Enable
SORQ1,SORQ2: Serial Output Request
TCK:
Test Clock Input
TDI:
Test Data Input
TDO:
Test Data Output
TICE:
Test In-Circuit Emulator
TMS:
Test Mode Select
V
DD
:
Power Supply
WAIT:
Wait Input
X/Y:
X/Y Memory Select
PIN IDENTIFICATION

µ
PD77016
7
Pin No.
Symbol
1
RESET
2
INT4
3
INT3
4
INT2
5
INT1
6
WAIT
7
HOLDRQ
8
CLKIN
9
P3
10
P2
11
P1
12
P0
13
CLKOUT
14
GND
15
V
DD
16
MWR
17
MRD
18
BSTB
19
HOLDAK
20
X/Y
21
DA15
22
DA14
23
DA13
24
DA12
25
GND
26
V
DD
27
DA11
28
DA10
29
DA9
30
DA8
31
DA7
32
DA6
33
DA5
34
DA4
35
GND
36
V
DD
37
DA3
38
DA2
39
DA1
40
DA0
Pin No.
Symbol
41
D15
42
D14
43
D13
44
D12
45
GND
46
V
DD
47
D11
48
D10
49
D9
50
D8
51
D7
52
D6
53
D5
54
D4
55
GND
56
V
DD
57
D3
58
D2
59
D1
60
D0
61
GND
62
V
DD
63
SI1
64
SIEN1
65
SCK1
66
SIAK1
67
SO1
68
SORQ1
69
SOEN1
70
GND
71
V
DD
72
SOEN2
73
SORQ2
74
SO2
75
SIAK2
76
SCK2
77
SIEN2
78
SI2
79
HCS
80
HRD
Pin No.
Symbol
81
HWR
82
HA0
83
HA1
84
HD7
85
HD6
86
HD5
87
HD4
88
HD3
89
HD2
90
HD1
91
HD0
92
HRE
93
HWE
94
GND
95
V
DD
96
TDO
97
TICE
98
TCK
99
TDI
100
TMS
101
IA15
102
IA14
103
IA13
104
IA12
105
GND
106
V
DD
107
IA11
108
IA10
109
IA9
110
IA8
111
IA7
112
IA6
113
IA5
114
IA4
115
GND
116
V
DD
117
IA3
118
IA2
119
IA1
120
IA0
Pin No.
Symbol
121
ID31
122
ID30
123
ID29
124
ID28
125
ID27
126
ID26
127
ID25
128
ID24
129
PWR
130
GND
131
V
DD
132
ID23
133
ID22
134
ID21
135
ID20
136
ID19
137
ID18
138
ID17
139
ID16
140
GND
141
V
DD
142
ID15
143
ID14
144
ID13
145
ID12
146
ID11
147
ID10
148
ID9
149
ID8
150
GND
151
V
DD
152
ID7
153
ID6
154
ID5
155
ID4
156
ID3
157
ID2
158
ID1
159
ID0
160
NC

µ
PD77016
8
CONTENTS
1.
PIN FUNCTIONS ...............................................................................................................................
9
1.1
Pin Functions ...........................................................................................................................................
9
1.2
Recommended Connection for Unused Pins ....................................................................................... 14
2.
FUNCTIONS ...................................................................................................................................... 15
2.1
Pipeline Processing ................................................................................................................................ 15
2.1.1
Outline ........................................................................................................................................... 15
2.1.2
Instructions with Delay .................................................................................................................. 15
2.2
Program Control Unit .............................................................................................................................. 16
2.3
Operation Unit ......................................................................................................................................... 16
2.3.1
General register (R0 to R7) ........................................................................................................... 16
2.3.2
MAC: Multiply ACcumulator ......................................................................................................... 17
2.3.3
ALU: Arithmetic Logic Unit ........................................................................................................... 17
2.3.4
BSFT: Barrel ShiFTer ................................................................................................................... 17
2.3.5
SAC: Shifter And Count Circuit .................................................................................................... 17
2.3.6
CJC: Condition Judge Circuit ....................................................................................................... 17
2.4
Memory ..................................................................................................................................................... 18
2.4.1
Instruction RAM Outline ................................................................................................................ 19
2.4.2
Data Memory Outline .................................................................................................................... 19
2.4.3
Data Memory Addressing .............................................................................................................. 19
2.5
On-chip Peripheral Circuit ...................................................................................................................... 20
2.5.1
Serial Interface Outline .................................................................................................................. 20
2.5.2
Host Interface Outline .................................................................................................................... 20
2.5.3
General Input/output Ports Outline ................................................................................................ 20
2.5.4
Wait Cycle Register ....................................................................................................................... 20
3.
INSTRUCTIONS ................................................................................................................................ 21
3.1
Outline ...................................................................................................................................................... 21
3.2
Instruction Set and Operation ................................................................................................................ 22
4.
ELECTRICAL SPECIFICATIONS ..................................................................................................... 29
5.
PACKAGE DRAWING ...................................................................................................................... 50
6.
RECOMMENDED SOLDERING CONDITIONS ................................................................................ 51

µ
PD77016
9
1. PIN FUNCTIONS
1.1 Pin Functions
∑ Power supply
Symbol
Pin No.
I/O
Function
15, 26, 36, 46, 56, 62, 71,
95, 106, 116, 131, 141, 151
14, 25, 35, 45, 55, 61, 70,
94, 105, 115, 130, 140, 150
∑ System control
Symbol
Pin No.
I/O
Function
CLKIN
8
I
External clock input
CLKOUT
13
O
Internal system clock output
RESET
1
I
Internal system reset signal input
∑ Interrupt
Symbol
Pin No.
I/O
Function
INT4 - INT1
2, 3, 4, 5
I
Maskable external interrupt input
∑ Falling edge detection
V
DD
≠
+5V power supply
GND
≠
Ground

µ
PD77016
10
∑ External data memory interface
Symbol
Pin No.
I/O
Function
X/Y
20
O
Memory select signal output
(3S)
∑ 0: X memory is used.
∑ 1: Y memory is used.
DA15 - DA0
Note 1.
O
Address bus to external data memory
(3S)
∑
External data memory is accessed.
∑ During the external memory is not accessed, these pins
keep the previous level.
These pins are set to low level; 0x0000, by reset.
They continue outputting low level until the first external
memory access.
D15 - D0
Note 2.
I/O
16 bits data bus to external data memory
(3S)
∑ External data memory is accessed.
MRD
17
O
Read output
(3S)
∑ Reads external memory
MWR
16
O
Write output
(3S)
∑ Writes external memory
WAIT
6
I
Wait signal input
∑
Wait cycle is input when external memory is read.
1: No wait
0: Wait
HOLDRQ
7
I
Hold request signal input
∑ Input low level when external data memory bus is
expected to use.
BSTB
18
O
Bus strobe signal output
∑ Outputs low level while the
µ
PD77016 is occupying
external memory bus.
HOLDAK
19
O
Hold acknowledge signal output
∑ Outputs low level when the
µ
PD77016 permits external
device to use external data memory bus.
Note 1.
DA15 to DA0 pins are located on Pin No. 21 - 24, 27 - 34, 37 - 40.
2.
D15 to D0 pins are located on Pin No. 41 - 44, 47 - 54, 57 - 60.
Remark
The state of the pins added 3S becomes high impedance when the external memory is not accessed or bus release signal
(HOLDAK = 0) is output.

µ
PD77016
11
∑ Serial interface
Symbol
Pin No.
I/O
Function
SCK1
65
I
Clock input for serial 1
SORQ1
68
O
Serial output 1 request
SOEN1
69
I
Serial output 1 enable
SO1
67
O (3S)
Serial data output 1
SIEN1
64
I
Serial input 1 enable
SI1
63
I
Serial data input 1
SCK2
76
I
Clock input for serial 2
SORQ2
73
O
Serial output 2 request
SOEN2
72
I
Serial output 2 enable
SO2
74
O (3S)
Serial data output 2
SIEN2
77
I
Serial input 2 enable
SI2
78
I
Serial data input 2
SIAK1
66
O
Serial input 1 acknowledge
SIAK2
75
O
Serial input 2 acknowledge
Remark
The state of the pins added 3S becomes high impedance, when data output have been finished or RESET is input.

µ
PD77016
12
∑ Host interface
Symbol
Pin No.
I/O
Function
HA1
83
I
Specifies register which HD7 to HD0 access
1:
Accesses HST:
Host interface status register
when HA1 = 0
0:
Accesses HDT
(out)
: Host transmit data register when
HRD = 0
0:
Accesses HDT
(in)
:
Host receive data register when
HWR = 0
HA0
82
I
Specifies bits of registers which HD7 to HD0 access
∑ 1: Accesses bits 15-8 of HST, HDT (out), HDT (in)
∑ 0: Accesses bits 7-0 of HST, HDT (out), HDT (in)
HCS
79
I
Chip select input
HRD
80
I
Host read input
HWR
81
I
Host write input
HRE
92
O
Host read enable output
HWE
93
O
Host write enable output
HD7 - HD0
84 - 91
I/O (3S)
8 bits host data bus
Remark
The state of the pins added 3S becomes high impedance when the host does not access host interface.
∑ I/O port
Symbol
Pin No.
I/O
Function
P3 - P0
9 - 12
I/O
I/O port

µ
PD77016
13
∑ External instructions memory interface
Symbol
Pin No.
I/O
Function
IA15 - IA0
Note 1.
O (3S)
Address bus to external instruction memory
∑ Even the internal instruction memory is accessed, the
address is output to the external instruction memory.
In this case, the
µ
PD77016 ignores data of external
instruction memory output.
ID31 - ID0
Note 2.
I/O (3S)
32 bits instruction input
PWR
129
O (3S)
Program memory write strobe
∑ Write strobe for external instruction memory. This pin
loads program to external instruction memory (not
internal memory) while
µ
PD77016 is in boot operation.
Note 1.
IA15 to IA0 pins are located on these pins: 101 to 104, 107 to 114, 117 to 120
2.
ID31 to ID0 pins are located on these pins: 121 to 128, 132 to 139, 142 to 149, 152 to 159
Remark
The state of the pins added 3S becomes high impedance when RESET is input.
∑ Debugging interface
Symbol
Pin No.
I/O
Function
TDO
96
O
For debugging
TICE
97
O
For debugging
TCK
98
I
For debugging
TDI
99
I
For debugging
TMS
100
I
For debugging

µ
PD77016
14
Pin I/O
INT1 - INT4
I
X/Y
O
DA0 - DA15
O
D0 - D15
Note 1
I/O
MRD, MWR
O
WAIT
I
HOLDRQ
I
BSTB
O
HOLDAK
O
SCK1, SCK2
I
SI1, SI2
I
SOEN1, SOEN2
I
SIEN1, SIEN2
I
SORQ1, SORQ2
O
SO1, SO2
O
SIAK1, SIAK2
O
HA0, HA1
I
HCS
I
HRD, HWR
I
HRE, HWE
O
HD0 - HD7
Note 2
I/O
P0 - P3
I/O
ID0 - ID31
I/O
IA0 - IA15
O
PWR
O
TCK
I
TDO, TICE
O
TMS, TDI
I
CLKOUT
O
Recommended connection
connect to V
DD
open
connect to V
DD
or GND, via a resistor
open
connect to V
DD
open
connect to V
DD
or GND
connect to GND
open
connect to V
DD
or GND
connect to V
DD
open
connect to V
DD
or GND, via a resistor
open
connect to GND, via a resistor
open
open(pull-up internally)
open
1.2 Recommended Connection for Unused Pins
Notes 1. Can leave open, if no access to external data memory is
executed in the whole of program.
But in the HALT mode when the current consumption is
reduced, connect a pin as recommended connection.
2. Can leave open, if HCS, HRD, HWR are fixed to high level.
But in the HALT mode when the current consumption is
reduced, connect a pin as recommended connection.
Remark I: Input pin, O: Output pin, I/O: Input/Output pin

µ
PD77016
15
2. FUNCTIONS
2.1 Pipeline Processing
This section describes the
µ
PD77016 pipeline processing.
2.1.1 Outline
The
µ
PD77016 basic operations are executed in following 3-stage pipeline.
(1) instruction fetch; if
(2) Instruction decoding; id
(3) execution; ex
When the
µ
PD77016 operates a result of a instruction just executed before, the data is input to ALU in parallel
with written back to general registers. Pipeline processing actualizes programming without delay time to execute
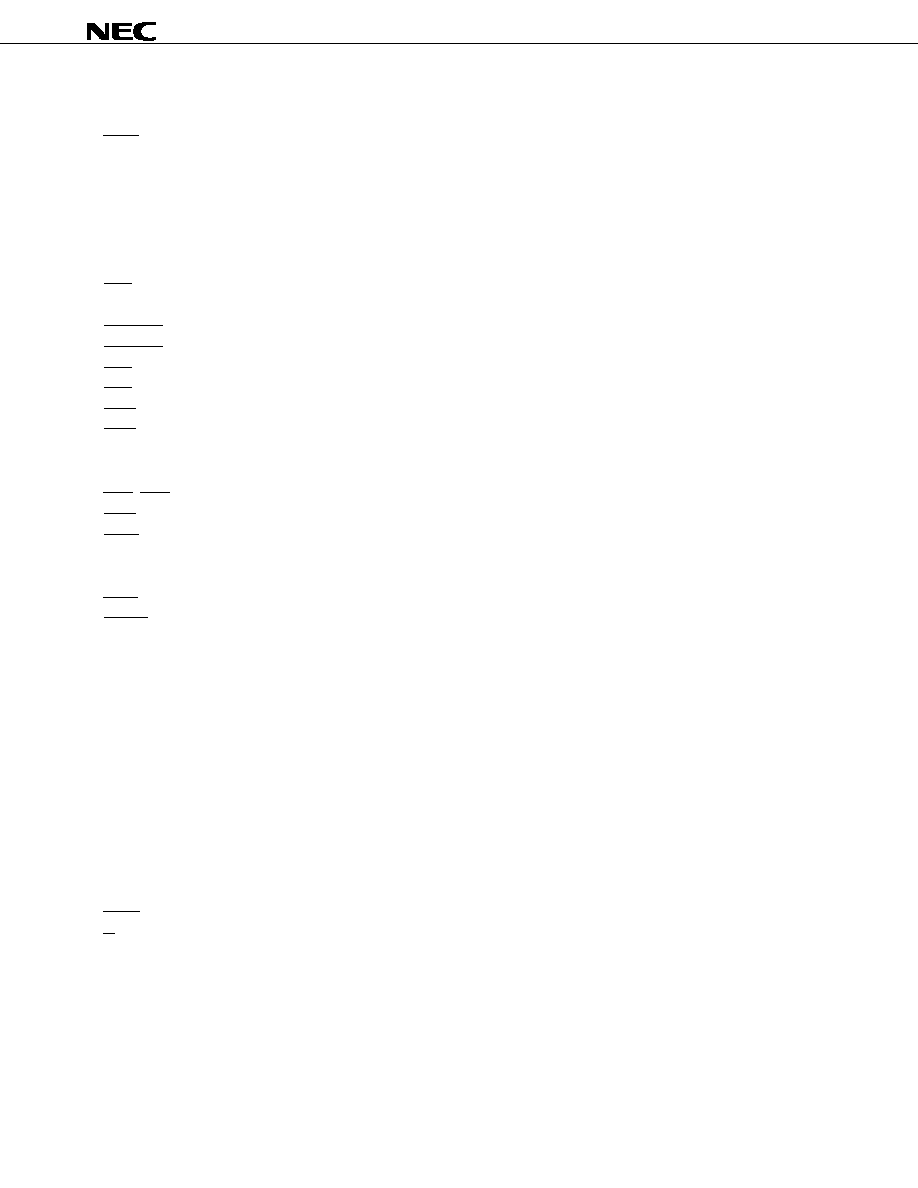
instructions and write back data. Three successive instructions and their processing timing are shown below.
Pipeline Processing Timing
2.1.2 Instructions with Delay
The following instructions have delay time in execution.
(1) Instructions to control interrupt
2 instruction cycles have been taken between instruction fetch and execution.
(2) Inter-register transfer instructions and immediate data set instructions
When data is set in data pointer, it needs 2 instruction cycles before the data is valid.
if1
id1
ex1
if2
id2
ex2
if3
id3
ex3
1 instruction cycle

µ
PD77016
16
2.2 Program Control Unit
Program control unit controls not only count up of program counter in normal operation, but loop, repeat,
branch, halt and interrupt.
In addition to loop stack of loop 4 level and program stack of 15 level, software stack can be used for multi-
loop and multi-interrupt/subroutine call.
The
µ
PD77016 has external 4 interruptions and internal 6 interruptions from peripheral, and specifies interrupt
enable or disable independently.
The HALT instruction causes the µPD77016 to place in low power standby mode.
When the HALT instruction is executed, power consumption decreases. HALT mode is released by interrupt
input or hardware reset input. It takes several system clock to recover.
2.3 Operation Unit
Operation unit consists of the following five parts.
≠ 40 bits general register
◊
8 for data load/store and input/output of operation data
≠ 16 bits
◊
16 bits + 40 bits
40 bits multiply accumulator
≠ 40 bits Data ALU
≠ 40 bits barrel shifter
≠ SAC: shifter and count circuit.
Standard word length is 40 bits to make overflow check and adjustment easy, and to accumulate the result
of 16 bits
◊
16 bits multiplication correctly.
2.3.1 General register (R0 to R7)
The
µ
PD77016 has eight 40 bits registers for operation input/output and load/store with memory. General
register consists of the following three parts.
≠ R0L to R7L (bit 15 to bit 0)
≠ R0H to R7H (bit 31 to bit 16)
≠ R0E to R7E (bit 39 to bit 32)
But each of RnL, RnH and RnE are treated as a register in the following conditions.
(1) General register used as 40 bits register
General registers are treated as 40 bits register, when they are used for the following aims.
(a) Operand for triminal operation (except for multiplier input)
(b) Operand for dyadic operation (except for multiplier and shift value)
(c) Operand for monadic operation (except for exponent instructions)
(d) Operand for operation
(e) Operand for conditional judge
(f)
Destination for load instruction (with sign extension and 0 clear)
(2) General register used as 32 bits register
Bit 31 to bit 0 of general register are treated as 32 bits register, when it is used for a operand of exponent
instruction.
Head room
0
0
1
31
32
39
S S S S S S S S
Result of multiplication among two's complement data

µ
PD77016
17
(3) General register used as 24 bits register
Bit 39 to bit 16 of general register are treated as 24 bits register, when it is used for destination with extended
sign for a load/store instruction.
(4) General register used as 16 bits register
Bit 31 to bit 16 of general register are treated as 16 bits register, when it is used for the following aims.
(a) Signed operand for multiplier
(b) Source/destination for load/store instruction
Bit 15 to bit 0 of general register are treated as 16 bits register, when it is used for the following aims.
(c) Unsigned operand for multiplier
(d) Shift value for shift instruction
(e) Source/destination for load/store instruction
(f)
Source/destination for inter-register transfer instruction
(g) Destination for immediate data set instruction
(f)
Hardware loop times
(5) General register used as 8 bits register
Bit 39 to bit 32 of general register are treated as 8 bits register, when it is used for source/destination of load/
store instruction.
2.3.2 MAC: Multiply ACcumulator
MAC multiplies a pair of 16 bits data, and adds or subtract the result and 40 bits data. MAC outputs 40 bits
data.
MAC operates three types of multiplication: signed data
◊
signed data, signed data
◊
unsigned data and
unsigned data
◊
unsigned data.
Result of multiplication and 40 bits data for addition can be added after 1 or 16 bits arithmetic shift right.
2.3.3 ALU: Arithmetic Logic Unit
ALU performs arithmetic operation and logic operation. Both input/output data are 40 bits.
2.3.4 BSFT: Barrel ShiFTer
BSFT performs shift right/left operation. Both input/output data are 40 bits. There are two types of shift right
operations; arithmetic shift right which sign is extended, and logic shift right which is input 0 in MSB first.
2.3.5 SAC: Shifter And Count Circuit
SAC calculates and outputs shift value for normalization. SAC is input 32 bits data and outputs the 40 bits
data. Then, bit 39 to bit 5 of output data is always 0.
2.3.6 CJC: Condition Judge Circuit
CJC judges whether condition is true or false with 40 bits input data. A conditional instruction is executed
when the result is true, and not executed when the result is false.

µ
PD77016
18
2.4 Memory
The
µ
PD77016 has one instruction memory area (64K words
◊
32 bits) and two data memory areas (64K words
◊
16 bits each). It adopts Harvard-type architecture, with instruction memory area and data memory areas
separated.
The
µ
PD77016 has 2 sets of data addressing units, which are dedicated for addressing data memory area.
Each addressing unit consists of four data pointers, four index registers, a modulo register and addressing ALU.
Memory areas are shown below.
X memory area addresses are specified by DP0 to DP3, and Y memory area addresses are specified by DP4
to DP7. After memory access, DPn (with the same subscript), can be modified by DNn value. Modulo operation
is performed with DMX for DP0 to DP3, with DMY for DP4 to DP7.
Caution
When any data is accessed or stored to system address, normal operation of the
µ
PD77016 is
not assured.
0xFFFF
0x4000
0x3FFF
0x3840
0x383F
0x3800
0x37FF
0x0800
0x07FF
External Data Memory
(48 K words)
System
Peripheral (64 words)
System
Data RAM (2 K words)
0xFFFF
0x4000
0x3FFF
0x0800
0x07FF
0x0240
0x023F
0x0100
0x00FF
Internal Instruction RAM (1.5 K words)
System
Vector (64 words)
System
Bootup ROM (256 words)
0x0200
0x01FF
0x0000
0x0000
External Instruction Memory
(48 K words)
Data Memory Area (X/Y Memory)
Instruction Memory Area

µ
PD77016
19
2.4.1 Instruction RAM Outline
The
µ
PD77016 has an instruction RAM (1.5 words
◊
32 bits). A system vector area is assigned to 64 words
of the instruction RAM. Internal RAM is initialized and rewritten by boot program.
Additionally external memory expansion is available as the
µ
PD77016 has interface with the external
instruction memory. When RAM is used as the external memory, it can be initialized and rewritten by boot
program.
Boot up ROM contains the program loading instruction code to internal and external instruction RAM.
When the external instruction memory area is accessed, instruction cycle can be 2 or more by wait function.
2.4.2 Data Memory Outline
The
µ
PD77016 has two data memory areas (64 words
◊
16 bits each) in X and Y memory areas.
Each memory areas consists of 2K words
◊
16 bits data RAM. Additionally, data memory expansion is
available as the
µ
PD77016 has interface with the external data memory.
Each data memory area includes on-chip peripheral area which consists of 64 words.
When the external data memory area is accessed, instruction cycle can be 2 or more by wait function.
2.4.3 Data Memory Addressing
There are following two types of data memory addressing.
∑ Direct addressing
The address is specified in the instruction field.
∑ Indirect addressing
The address is specified by the data pointer (DP). DP can get a bit reverse before addressing. It can update
the DP value after accessing data memory.

µ
PD77016
20
2.5 On-chip Peripheral Circuit
The
µ
PD77016 includes serial interface, host interface, general input/output ports and wait cycle registers.
They are mapped in both X and Y memory areas, and are accessed as memory mapped I/O by the
µ
PD77016
CPU.
2.5.1 Serial Interface Outline
The
µ
PD77016 has 2 channel serial interfaces. Serial I/O clock must be provided from external. Frame length
can be programmed independently to be 8 bits or 16 bits. MSB first or LSB first can also be selected. Data is
input/output by hand shaking for an external device, and by interrupts, polling or wait function in internal.
2.5.2 Host Interface Outline
The
µ
PD77016 has 8 bits parallel ports as host interface to input/output data to and from host CPU and DMA
controller. When an external device accesses host interface, HA0 and HA1 pins; which are host address input
pins; specifies bit 15 to bit 8 and bit 7 to bit 0. The
µ
PD77016 includes 3 registers consisting of 16 bits, which
are dedicated for input data, output data and status. The
µ
PD77016 has three types of interface method for
internal and external data; interrupts, polling and wait function.
2.5.3 General Input/output Ports Outline
General input/output ports consist of 4 bits. User can set each port as input or output. The
µ
PD77016 includes
two registers. One is 4 bits register for input/output data, and the other is 16 bits for control.
2.5.4 Wait Cycle Register
The wait cycle registers consist of 16 bits. It is used to set wait cycle number when external memory is
accessed. 0, 1, 3, or 7 wait cycle can be set in every data area which is divided into 8, and in every X and Y
memory area which is divided into 4.
When data area is accessed, wait cycle can be also set by WAIT pin.

µ
PD77016
21
3. INSTRUCTIONS
3.1 Outline
All
µ
PD77016 instructions are one-word instructions, consisting of 32 bits. And they are executed in 30 ns
(min.) per instruction. There are following 9 instruction types.
(1) Trinomial instructions
: specify the Acc operation. 3 of general registers are specified optionally as the operation object.
(2) Dyadic operation instructions
: specify the Acc, ALU or shifter operation. 2 of general registers are specified optionally as the operation
object. Some instructions can specify a general register and immediate data.
(3) Monadic operation instructions
: specify operations by ALU. 1 general register is specified optionally as the operation object.
(4) Load/store instructions
: transfer 16 bits data from memory to general registers, from general registers to memory and between general
registers.
(5) Inter-register transfer instructions
: transfer data between general register and other registers.
(6) Immediate data set instructions
: set immediate data at general registers or each registers of address operation unit.
(7) Branch instructions
: specify the direction of the program flow.
(8) Hardware loop instructions
: specify times of instruction repeating.
(9) Control Instructions
: specify the control program.

µ
PD77016
22
3.2 Instruction Set and Operation
An operation is written according to the rules for expressing. An expression of instructions having two or more
descriptions can have only one selected.
(a) Expressions and selectable registers
Expression and selectable registers are shown as follows.
Expression
Selectable registers
ro, ro', ro"
R0 - R7
rl, rl'
R0L - R7L
rh, rh'
R0H - R7H
re
R0E - R7E
reh
R0EH - R7EH
dp
DP0 - DP7
dn
DN0 - DN7
dm
DMX, DMY
dpx
DP0 - DP3
dpy
DP4 - DP7
dpx_mod
DPn, DPn++, DPn≠ ≠, DPn##, DPn%%, !DPn## (n = 0 - 3)
dpy_mod
DPn, DPn++, DPn≠ ≠, DPn##, DPn%%, !DPn## (n = 4 - 7)
dp_imm
DPn##imm (n = 0 - 7)
◊◊◊
content of memory address
◊◊◊
Example
When the content of DP0 register is 1000,
DP0 shows the content of memory
address 1000.

µ
PD77016
23
(b) Modifying data pointers
Data pointers are modified after memory access. The results are valid immediately after instruction execution.
It is impossible to modify without memory access.
Description
Operation
DPn
No operation: DPn value does not change.
DPn++
DPn
DPn+1
DPn≠
≠
DPn
DPn≠1
DPn##
DPn
DPn + DNn: Adds DN0-DN7 corresponding to DP0-DP7
Example DP0
DP0 + DN0
DPn%%
(n = 0 - 3) DP
n
= ((DP
L
+ DNn ) mod (DMX + 1)) + DP
H
(n = 4 - 7) DP
n
= ((DP
L
+ DNn ) mod (DMY + 1)) + DP
H
!DPn##
Access memory after DPn value is bit-reversed
After memory access, DPn
DPn + DNn
DPn##imm
DPn
DPn + imm
(c) Concurrent processing instructions
q
q
shows concurrent processing instruction.
Instruction names are shown in abbreviation.
TRI
: Trinomial
DYAD
: Dyadic
MONAD : Monadic
TRANS
: Inter-register transfer
IMM
: Immediate data set
BR
: Branch
LOOP
: Hardware loop
CTR
: Control
(d) State of Overflow flag (OV)
The following marks show the
µ
PD77016 overflow flag state.
: Not affected
: 1 is set when the result of operation is overflow.
Caution
If overflow does not occur after operation, OV is not reset, and keeps the state before operation.

µ
PD77016
24
Concurrent Writing Processing
Flag
TRI.
DYAD. MONAD.
Load/
TRANS.
IMM.
BR. LOOP.
CTL. OV
store
Trinomial
Dyadic
µ
PD77016 INSTRUCTION SET
Multiply add
ro = ro + rh
rh'
ro
ro+rh
rh'
Multiply sub
ro = ro≠rh
rh'
ro
ro≠rh
rh'
Sign unsign
ro = ro + rh
rl
ro
ro+rh
rl
Multiply add
(rl should be a plus
integral number.)
Unsign unsign
ro=ro+rl
rl'
ro
ro+rl
rl'
Multiply add
(rl and rl' should be a plus
integral number.)
1 bit shift Multiply add
ro=(ro>>1)+rh
rh'
ro
+rh
rh'
16 bits shift Multiply add
ro = (ro>>16)+rh
rh'
ro
+rh
rh'
Multiply
ro=rh
rh'
ro
rh
rh'
Add
ro"=ro+ro'
ro"
ro+ro'
Immediate add
ro'=ro+imm
ro'
ro+imm (imm 1)
Sub
ro"=ro≠ro'
ro"
ro≠ro'
Immediate sub
ro'=ro≠imm
ro'
ro≠imm (imm 1)
Arithmetic right shift
ro'=ro SRA rl
ro'
ro >> rl
Immediate arithmetic
ro'=ro SRA imm
ro'
ro >> imm
right shift
Logic right shift
ro'=ro SRL rl
ro'
ro >> rl
Immediate Logic right shift
ro'=ro SRL imm
ro'
ro >> imm
Logic left shift
ro'=ro SLL rl
ro'
ro << rl
Immediate logic left shift
ro'=ro SLL imm
ro'
ro << imm
ro
2
ro
2
16
Name
Mnemonic
Operation

µ
PD77016
25
Dyadic
Monadic
Concurrent Writing Processing
Flag
TRI.
DYAD. MONAD.
Load/
TRANS.
IMM.
BR. LOOP.
CTL. OV
store
Name
Mnemonic
Operation
And
ro" = ro & ro'
ro"
ro & ro'
Immediate and
ro' = ro & imm
ro'
ro & imm
Or
ro" = ro | ro'
ro"
ro | ro'
Immediate or
ro' = ro | imm
ro'
ro | imm
Exclusive or
ro" = ro ^ ro'
ro"
ro ^ ro'
Immediate exclusive or
ro = ro ^ imm
ro
ro ^ imm
Less than
ro" = LT(ro, ro')
if(ro<ro')
{ro"
0x0000000001}
else {ro"
0x0000000000}
Clear
CLR(ro)
ro
0x0000000000
Increment
ro' = ro + 1
ro'
ro + 1
Decrement
ro' = ro ≠ 1
ro'
ro ≠ 1
Absolute
ro' = ABS (ro)
if (ro<0)
{ro'
≠ro}
else {ro'
ro}
One's complement
ro' =
~
ro
ro'
~
ro
Two's complement
ro' = ≠ro
ro'
≠ro
Clip
ro' = CLIP (ro)
if (ro>0x007FFFFFFF)
{ro'
0x007FFFFFFF]
else if, (ro<0xFF80000000)
{ro'
0xFF80000000}
else {ro'
ro}
Round
ro' = ROUND (ro)
if (ro>0x007FFF0000)
{ro'
0x007FFF0000}
else if, (ro>0xFF80000000)
{ro'
0xFF80000000}
else {ro'
(ro + 0x8000) & 0xFFFFFF0000}
Exponent
ro' = EXP (ro)
ro'
log
2
Substitution
ro' = ro
ro'
ro
1
ro
( )

µ
PD77016
26
Monadic
Cumulation
ro'+ = ro
ro'
ro'+ro
Degression
ro'≠ = ro
ro'
ro'≠ro
Division
ro'/ = ro
if (sign(ro')==sign(ro))
{ro'
(ro'≠ro)<<1}
else
{ro'
(ro'+ro)<<1}
if (sign(ro')==0
{ro'
ro'+1}
Parallel load/store
ro=
dpx_mod ro'=
dpy_mod
ro
dpx, ro'
dpy
Note1, Note2.
ro=
dpx_mod
dpy_mod=rh
ro
dpx,
dpy
rh
dpx_mod=rh ro=
dpy_mod
dpx
rh, ro
dpy
dpx_mod=rh
dpy_mod=rh'
dpx
rh,
dpy
rh'
Section load/store
dest=
dpx_mod dest'=
dpy_mod
dest
dpx, dest'
dpy
Note1, Note2, Note 3.
dest=
dpx_mod
dpy_mod=source
dest
dpx,
dpy
source
dpx_mod=source dest=
dpy_mod
dpx
source, dest
dpy
dpx_mod=source
dpy_mod=source'
dpx
source,
dpy
source'
Concurrent Writing Processing
Flag
TRI.
DYAD. MONAD.
Load/
TRANS.
IMM.
BR. LOOP.
CTL. OV
store
Name
Mnemonic
Operation
Note 1.
One or both of a mnemonic pair can be written.
2.
After execution of load/store, data is modified by mod.
3.
One of following mnemonic should be selected: dest, dest' = {ro, reh, re, rh, rl}, source, source' = {re, rh, rl}.
Load/store

µ
PD77016
27
Load/store
Inter-register
transfer
Immediate
data set
Direct addressing
dest =
addr
dest
addr
load/store Note 1.
addr = source
addr
source
Immediate index
dest =
dp_imm
dest
dp
load/store Note 2.
dp_imm = source
dp
source
Inter-register transfer
dest = rl
dest
rl
Note 3.
rl = source
rl
source
Immediate data set
rl = imm
rl
imm
(provided imm = 0-0xFFFF)
dp = imm
dp
imm
(provided imm = 0-0xFFFF)
dn = imm
dn
imm
(provided imm = 0-0xFFFF)
dm = imm
dm
imm
(provided imm = 1-0xFFFF)
Name
Mnemonic
Operation
Concurrent Writing Processing
Flag
TRI.
DYAD. MONAD.
Load/
TRANS.
IMM.
BR. LOOP.
CTL. OV
store
Note 1.
One of following mnemonic should be selected: dest = {ro, reh, re, rh, rl}, source = {re, rh, rl}, add = .
2.
One of following mnemonic should be selected: dest = {ro, reh, re, rh, rl}, source = {re, rh, rl}.
3.
Any register except general registers should be selected as dest or source.
0: X-0xFFFF:X memory
0: Y-0xFFFF:Y memory

µ
PD77016
28
Concurrent Writing Processing
Flag
TRI.
DYAD. MONAD.
Load/
TRANS.
IMM.
BR. LOOP.
CTL. OV
store
Name
Mnemonic
Operation
Branch
Hardware
loop
Jump
JMP imm
PC
imm
Inter-register indirect jump
JMP dp
PC
dp
Subroutine call
CALL imm
SP
SP + 1
STK
PC +
PC
imm
Inter-register indirect
CALL dp
SP
SP + 1
subroutine call
STK
PC + 1
PC
dp
Return
RET
PC
STK
SP
SP ≠ 1
Return from interrupt
RETI
PC
STK
STK
SP ≠ 1 Restore the
interrupt enable flag
Repeat
REP count
start
RC
count
RF
0
repeat
PC
PC
RC
RC ≠ 1
end
PC
PC + 1
RF
1
Loop
LOOP count
start
RC
count
(Mnemonics more than two lines)
RF
0
repeat
PC
PC
RC
RC ≠ 1
end
PC
PC + 1
RF
1
Loop pop
LPOP
LC
LSR3
LE
LSR2
LS
LSR1
LSP
LSP≠1
No operation
NOP
PC
PC + 1
Halt
HALT
CPU stop
If
IF (ro cond)
Conditional judge
Forget interrupt
FINT
Forget interrupt request
Control

µ
PD77016
29
4. ELECTRICAL SPECIFICATIONS
Absolute maximum ratings (T
A
= +25 ∞C)
Parameters
Symbol
Conditions
Ratings
Unit
Power supply voltage
V
DD
≠0.5 to +7.0
V
Input voltage
V
I
≠0.5 to V
DD
+ 0.5
V
Output voltage
V
O
≠0.5 to V
DD
+ 0.5
V
Storage temperature
T
stg
≠65 to +150
∞C
Operating ambient temperature
T
A
≠40 to +85
∞C
Caution
Exposure to Absolute Maximum Ratings for extended periods may affect device reliability;
exceeding the ratings could cause permanent damage. The parameters apply independently.
The device should be operated within the limits specified under DC and AC Characteristics.
Capacitance (T
A
= +25 ∞C, V
DD
= 0 V)
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
Input capacitance
C
I
15
pF
Output capacitance
C
O
15
pF
DC characteristics (T
A
=≠40 to +85 ∞C, V
DD
= 5 V ±10 %)
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
High level input voltage
Low level input voltage
High level CLKIN voltage
Low level CLKIN voltage
High level output voltage
Low level output voltage
Low level input current
High level input leak current
Low level input leak current
Power supply current
f
c
= 1 MHz
Unmeasured pins returned to 0
V.
140
80
2.2
0.7V
DD
≠0.5
≠0.5
0.8V
DD
≠0.5
0.8V
DD
V
DD
+ 0.5
V
DD
+ 0.5
+0.8
0.2V
DD
V
DD
+ 0.5
0.2V
DD
0.4
≠400
10
≠10
300
V
V
V
V
V
V
V
V
µ
A
µ
A
µ
A
mA
mA
µ
A
V
IH
V
IHC
V
IL
V
ILC
V
IHX
V
ILX
V
OH
V
OL
I
IL
I
LIH
I
LIL
I
DD
Note
I
DDH
I
DDS
Note
The TYP. value is measured when a general program is executed, and V
DD
= 5 V conditon. The MAX.
value is measured when a special program that max. switching required is executed, and V
DD
= 5.5 V
condition
.
10
except for RESET, CLKIN,
INT1 - INT4, WAIT, HCS,
HRD, HWR, TCK, TDI, TMS
RESET, INT1 - INT4, WAIT, HCS,
HRD, HWR, TCK, TDI, TMS
except for RESET, CLKIN,
INT1 - INT4, WAIT, HCS,
HRD, HWR, TCK, TDI, TMS
RESET, INT1 - INT4, WAIT, HCS,
HRD, HWR,
TCK, TDI, TMS
I
OH
= ≠2.5 mA
I
OL
= 2.5 mA
TDI, TMS, V
I
= 0 V
V
I
= V
DD
except for TDI, TMS, V
I
= 0 V
Active mode, t
cCI
= 15 ns
V
IH
= V
DD
, V
IL
= 0 V, no load
HALT mode, t
cCI
= 15 ns,
V
IH
= V
DD
, V
IL
= 0 V, no load
CLKIN = 0 V
V
IH
= V
DD
, V
IL
= 0 V, no load

µ
PD77016
30
AC Characteristics (T
A
= ≠40 to +85 ∞C, V
DD
= 5 V ±10%, C
L
= 30 pF)
Clock
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
CLKIN cycle time
t
cCI
15
500
ns
CLKIN high level width
t
wCIH
6.75
0.55 t
cCI
ns
CLKIN low level width
t
wCIL
6.75
0.55 t
cCI
ns
CLKIN rise/fall time
t
rfCI
6
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
CLKOUT cycle time
t
cCO
2t
cCI
ns
CLKOUT level width
t
wCO
t
cCI
≠ 3
ns
CLKOUT rise/fall time
t
rfCO
3
ns
Measurement Standards Common to Switching Characteristics
0.8 V
DD
0.5 V
DD
0.2 V
DD
0.8 V
DD
0.5 V
DD
0.2 V
DD
Test points
CLKIN
2.2 V
1.5 V
0.8 V
2.2 V
1.5 V
0.8 V
Test points
Input
(except for CLKIN)
2.2 V
1.5 V
0.8 V
2.2 V
1.5 V
0.8 V
Test points
Output

µ
PD77016
31
Reset, Interrupt
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
RESET low level width
t
w(RL)
4t
cCO
ns
RESET recovery time
t
rec(R)
4t
cCO
ns
INT1-INT4 low level width
t
w(INTL)
3t
cCO
ns
INT1-INT4 recovery time
t
rec(INT)
3t
cCO
ns
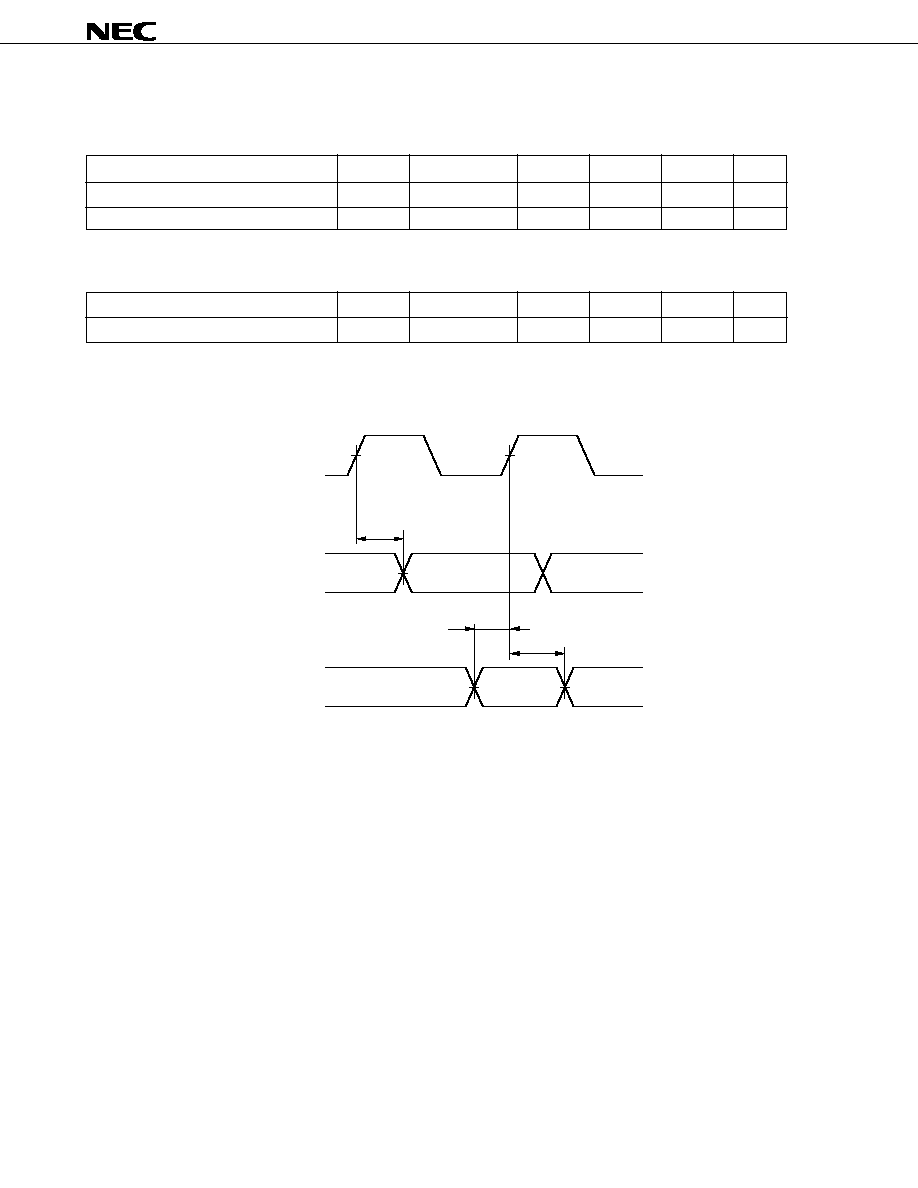
Clock Input/Output Timing
t
cCI
t
wCIH
t
wCIL
t
rfCI
t
rfCI
CLKIN
CLKOUT
t
cCO
t
wCO
t
wCO
t
rfCO
t
rfCO
Reset, Interrupt Timing
Interrupt Timing
RESET
t
w(RL)
t
rec(R)
INT1 - INT4
t
w(INTL)
t
rec(INT)

µ
PD77016
32
External Data Memory Access
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
Read data setup time
t
suDDRD
14
ns
Read data hold time
t
hDDRD
0
ns
WAIT setup time
t
suWA
8
ns
WAIT hold time
t
hWA
0
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
Address output delay time
t
dDA
0
6
ns
MRD output delay time
t
dDR
0
8
ns
MRD hold time
t
hDR
0
8
ns
Write data setup time
t
sDDWD
t
cCI
+ t
wCIH
≠
ns
15 + t
cDW
Note
Write data output hold time
t
hDDWD
0
15
ns
MWR output delay time
t
dDW
t
wCIH
≠ 4
ns
MWR setup time
t
suDW
t
wCIL
≠ 4
ns
MWR low level width
t
wDWL
t
cCI
≠ 4
ns
+ t
cDW
Note
MWR high level width
t
wDWH
t
cCI
≠ 4
ns
Note t
cDW
: Data wait cycle

µ
PD77016
33
External Data Memory Read Operation
t
suDDRD
t
hDR
t
hWA
CLKOUT
DA0 -
DA15,
X/Y
D0 - D15
MRD
WAIT
t
dDA
t
dDR
t
suWA
t
suWA
t
hWA
t
hDDRD
External Data Memory Write Operation
t
hWA
CLKOUT
DA0 - DA15,
X/Y
D0 - D15
MWR
WAIT
t
dDA
t
suWA
t
suWA
t
hWA
t
wDWH
t
wDWL
t
hDDWD
t
dDW
t
suDW
t
sDDWD
Hi-Z
Hi-Z

µ
PD77016
34
External Instruction Memory Access
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
ID setup time (to CLKOUT
)
t
suID
14
ns
ID hold time (to CLKOUT
)
t
hID
0
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
IA output delay time
t
dIA
10
ns
IA hold time
t
hIA
0
6
ns
ID write setup time
t
sIDW
t
cCI
+ t
wCIH
ns
≠ 15
ID write hold time
t
hIDW
0
ns
PWR output delay time
t
dIW
10
ns
Address
PWR setup time
t
d(IAV-IWV)
t
cCI
+ t
wCIH
ns
≠ 4
PWR setup time
t
suIW
t
wCIL
≠ 4
ns
PWR width
t
wIW
t
cCO
≠ 4
ns
+ t
cIW
Remark t
cIW
: Instruction wait cycle

µ
PD77016
35
External Instruction Memory Read Operation
CLKOUT
IA0 - IA15
ID0 - ID31
PWR
RESET
t
dIA
t
suID
t
hIA
t
hID
t
dIW
Hi-Z
Hi-Z
External Instruction Memory Write Operation
CLKOUT
IA0 - IA15
ID0 - ID31
PWR
t
hIA
t
sIDW
t
hIDW
t
suIW
t
wIW
t
d(IAV-IW V)
Hi-Z
Hi-Z

µ
PD77016
36
Bus Arbitration
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
HOLDRQ setup time
t
suHRQ
8
ns
HOLDRQ hold time
t
hHRQ
0
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
BSTB hold time
t
hBS
0
6
ns
BSTB output delay time
t
dBS
0
6
ns
HOLDAK output delay time
t
dHAK
0
6
ns
HOLDAK hold time
t
hHAK
0
6
ns
Data hold time when bus arbitration
t
h(BS-D)
15
ns
Data valid time after bus arbitration
t
v(BS-D)
15
ns

µ
PD77016
37
Bus Arbitration Timing (Bus idle)
CLKOUT
t
suHRQ
BSTB
HOLDRQ
HOLDAK
X/Y, DA0 - DA15,
MRD, MWR
t
hBS
(Bus busy)
Bus idle
t
dBS
t
dHAK
t
h(BS-D)
t
hHRQ
t
suHRQ
Bus release
Bus idle
(Bus busy)
t
hHRQ
t
v(BS-D)
t
hHAK
Hi-Z

µ
PD77016
38
Bus Arbitration Timing (Bus busy)
CLKOUT
t
suHRQ
BSTB
HOLDRQ
HOLDAK
X/Y, DA0 - DA15,
MRD, MWR
(Bus busy)
Bus busy
t
hBS
t
dHAK
t
suHRQ
Bus idle
Bus idle
(Bus busy)
t
hHRQ
t
v(BS-D)
t
hHAK
Bus release
t
hHRQ
t
dBS
t
h(BS-D)
Hi-Z

µ
PD77016
39
Bus Arbitration Timing (Bus slave)
CLKOUT
BSTB
HOLDRQ
HOLDAK
X/Y, DA0 - DA15,
MRD, MWR
Load/store External Memory
Bus idle
Bus hold
Bus idle
Hi-Z
Hi-Z

µ
PD77016
40
Serial Interface
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
SCK input cycle time
t
cSC
2t
cCO
ns
SCK input high/low level width
t
wSC
25
ns
SCK input rise/fall time
t
rfSC
3
20
ns
SOEN recovery time
t
recSOE
10
ns
SOEN hold time
t
hSOE
5
ns
SIEN recovery time
t
recSIE
10
ns
SIEN hold time
t
hSIE
5
ns
SI setup time
t
suSI
10
ns
SI hold time
t
hSI
0
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
SORQ output delay time
t
dSOR
0
30
ns
SORQ hold time
t
hSOR
0
30
ns
SO valid time
t
vSO
0
30
ns
SO hold time
t
hSO
60
ns
SIAK output delay time
t
dSIA
0
30
ns
SIAK hold time
t
hSIA
0
30
ns
Notes for Serial Clock
Serial clock inputs SCK1 and SCK2 are sensitive to any kind of interfering signals (noise on power supply,
induced voltage, etc.). Spurious signals can cause malfunction of the device. Special care for the serial clock
design should be taken. Careful grounding, decoupling and short wiring of SCK1 and SCK2 are recommended.
Intersection of SCK1 and SCK2 with other serial interface lines or close wiring to lines carrying high frequency
signals or large changing currents should be avoided.
It considers for the serial clock to make a waveform stable especially about the rising and falling.
Example 1. good example
Straight rising form and falling
form
Example 2. no good example
It doesn't bound. It doesn't make
noise one above another.
Example 3. no good example
It doesn't make a stair stepping.

µ
PD77016
41
Serial Output Timing 1
SCK1,
SCK2
t
rfSC
SORQ1,
SORQ2
SOEN1,
SOEN2
SO1,
SO2
1st
Last
t
hSO
t
vSO
t
vSO
t
hSOE
t
recSOE
t
recSOE
t
hSOE
t
dSOR
t
wSC
t
wSC
t
cSC
t
hSOR
t
rfSC
Hi-Z
Hi-Z

µ
PD77016
42
Serial Output Timing 2 (Continual output)
SCK1,
SCK2
t
rfSC
SORQ1,
SORQ2
SOEN1,
SOEN2
SO1,
SO2
1st
Last
t
vSO
t
hSOE
t
recSOE
t
dSOR
t
wSC
t
wSC
t
cSC
t
hSOR
t
rfSC
Last
Hi-Z

µ
PD77016
43
Serial Input Timing 1
SCK1,
SCK2
SIAK1,
SIEN1,
SIEN2
SI1,
SI2
t
cSC
t
wSC
t
wSC
t
dSIA
t
recSIE
t
hSIE
t
recSIE
t
hSIE
t
hSIA
t
suSI
t
hSI
1st
2nd
t
rfSC
t
rfSC
3rd
SIAK2

µ
PD77016
44
Serial Input Timing 2 (Continual input)
SCK1,
SCK2
SIEN1,
SIEN2
SI1,
SI2
t
cSC
t
wSC
t
wSC
t
dSIA
t
recSIE
t
hSIE
t
hSIA
t
suSI
t
hSI
1st
3rd
t
rfSC
t
rfSC
Last
Last≠1
2nd
SIAK1,
SIAK2

µ
PD77016
45
Host Interface
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
HRD delay time
t
dHR
0
ns
HRD width
t
wHR
2t
cCO
ns
HCS, HA0, HA1 read hold time
t
hHCAR
5
ns
HCS, HA0, HA1 write hold time
t
hHCAW
5
ns
HRD, HWR recovery time
t
recHS
2t
cCO
ns
HWR delay time
t
dHW
0
ns
HWR width
t
wHW
2t
cCO
ns
HWR hold time
t
hHDW
5
ns
HWR setup time
t
suHDW
20
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
HRE, HWE output delay time
t
dHE
30
ns
HRE, HWE hold time
t
hHE
20
ns
HRD valid time
t
vHDR
30
ns
HRD hold time
t
hHDR
0
ns

µ
PD77016
46
Host Read Interface Timing
CLKOUT
HRD
t
dHE
t
hHDR
t
hHCAR
t
recHS
t
vHDR
t
wHR
t
dHR
t
hHE
HCS, HA0, HA1
HD0 - HD7
HRE
Hi-Z
Hi-Z

µ
PD77016
47
Host Write Interface Timing
CLKOUT
HWR
t
dHE
t
hHDW
t
hHCAW
t
recHS
t
wHW
t
dHW
t
hHE
HCS, HA0, HA1
HD0 - HD7
HWE
t
suHDW
µ
PD77016
48
General Input/Output Ports
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
Port input setup time
t
suPI
10
ns
Port input hold time
t
hPI
10
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
Port output delay time
t
dPO
0
30
ns
General Input/Output Ports Timing
CLKOUT
P0 - P3
(Output)
P0 - P3
(Input)
t
dPO
t
suPI
t
hPI

µ
PD77016
49
Debugging Interface (JTAG)
Required Timing Condition
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
TCK cycle time
t
cTCK
4t
cCO
ns
TCK high level width
t
wTCKH
50
ns
TCK low level width
t
wTCKL
50
ns
TCK rise/fall time
t
rfTCK
3
20
ns
TMS, TDI setup time
t
suDI
10
ns
TMS, TDI hold time
t
hDI
15
ns
Input pin setup time
t
suJIN
10
ns
Input pin hold time
t
hJIN
0
ns
Switching Characteristics
Parameters
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
TDO output delay time
t
dDO
0
30
ns
Output pin output delay time
t
dJOUT
30
ns
Debugging Interface Timing
Remark For the details of JTAG, refer to "IEEE1149.1."
t
cTCK
t
wTCKH
t
wTCKL
t
suDI
t
hDI
Valid
Valid
Valid
t
dDO
t
suJIN
t
hJIN
Valid
t
dJOUT
t
rfTCK
t
rfTCK
TCK
TMS,
TDI
TDO
Capture
state
Update
state

µ
PD77016
50
160 PIN PLASTIC QFP (FINE PITCH) ( 24)
NOTE
Each lead centerline is located within 0.10 mm (0.004 inch) of
its true position (T.P.) at maximum material condition.
120
121
81
80
1
160
40
41
J
H
I
M
K
N
L
detail of lead end
S160GM-50-JMD,KMD
ITEM
MILLIMETERS
INCHES
A
B
C
D
F
G
H
I
J
K
26.0±0.2
24.0±0.2
2.25
0.22
0.10
24.0±0.2
L
M
0.10
0.17
1.0±0.2
0.5 (T.P.)
0.5±0.2
N
2.7
26.0±0.2
2.25
P
0.4±0.1
Q
1.024
0.945±0.008
1.024
0.089
0.089
0.009±0.002
0.004
0.020 (T.P.)
0.039
0.020
0.007
0.004
0.106
0.016
+0.008
≠0.009
+0.001
≠0.003
3.3 MAX.
S
0.130 MAX.
0.945±0.008
+0.03
≠0.07
+0.004
≠0.005
+0.008
≠0.009
+0.008
≠0.009
+0.05
≠0.04
+0.009
≠0.008
3∞
R
3∞
+7∞
≠3∞
+7∞
≠3∞
A
B
Q
C
D
F
G
P
M
R
S
5. PACKAGE DRAWING

µ
PD77016
51
6. RECOMMENDED SOLDERING CONDITIONS
When soldering this product, it is highly recommended to observe the conditions as shown below. If other
soldering processes are used, or if the soldering is performed under different conditions, please make sure to
consult with our sales offices.
For more details, refer to our document "SEMICONDUCTOR DEVICE MOUNTING TECHNOLOGY MANUAL"
(C10535E).
Surface mount device
µ
PD77016GM-KMD: 160-pin plastic QFP (FINE PITCH) (24
◊
24 mm)
Process
Conditions
Symbol
Infrared ray reflow
Peak temperature: 235 ∞C or below (Package surface temperature),
IR35-207-1
Reflow time: 30 seconds or less (at 210 ∞C or higher),
Maximum number of reflow processes: 1 time,
Exposure limit
Note
: 7 days (20 hours pre-baking is required at 125 ∞C
afterwards).
VPS
Peak temperature: 215 ∞C or below (Package surface temperature),
VP15-207-1
Reflow time: 40 seconds or less (at 200 ∞C or higher),
Maximum number of reflow processes: 1 time,
Exposure limit
Note
: 7 days (20 hours pre-baking is required at 125 ∞C
afterwards).
Partial heating method
Pin temperature: 300 ∞C or below,
≠
Heat time: 3 seconds or less (Per each side of the device).
Note Maximum allowable time from taking the soldering package out of dry pack to soldering.
Storage conditions: 25 ∞C and relative humidity of 65 % or less.
Caution
Apply only one kind of soldering condition to a device, except for "partial heating method",
or the device will be damaged by heat stress.

µ
PD77016
52
[MEMO]

µ
PD77016
53
[MEMO]

µ
PD77016
54
[MEMO]

µ
PD77016
55
NOTES FOR CMOS DEVICES
1
PRECAUTION AGAINST ESD FOR SEMICONDUCTORS
Note: Strong electric field, when exposed to a MOS device, can cause destruction
of the gate oxide and ultimately degrade the device operation. Steps must
be taken to stop generation of static electricity as much as possible, and
quickly dissipate it once, when it has occurred. Environmental control must
be adequate. When it is dry, humidifier should be used. It is recommended
to avoid using insulators that easily build static electricity. Semiconductor
devices must be stored and transported in an anti-static container, static
shielding bag or conductive material. All test and measurement tools
including work bench and floor should be grounded. The operator should
be grounded using wrist strap. Semiconductor devices must not be touched
with bare hands. Similar precautions need to be taken for PW boards with
semiconductor devices on it.
2
HANDLING OF UNUSED INPUT PINS FOR CMOS
Note: No connection for CMOS device inputs can be cause of malfunction. If no
connection is provided to the input pins, it is possible that an internal input
level may be generated due to noise, etc., hence causing malfunction. CMOS
device behave differently than Bipolar or NMOS devices. Input levels of
CMOS devices must be fixed high or low by using a pull-up or pull-down
circuitry. Each unused pin should be connected to V
DD
or GND with a
resistor, if it is considered to have a possibility of being an output pin. All
handling related to the unused pins must be judged device by device and
related specifications governing the devices.
3
STATUS BEFORE INITIALIZATION OF MOS DEVICES
Note: Power-on does not necessarily define initial status of MOS device. Produc-
tion process of MOS does not define the initial operation status of the device.
Immediately after the power source is turned ON, the devices with reset
function have not yet been initialized. Hence, power-on does not guarantee
out-pin levels, I/O settings or contents of registers. Device is not initialized
until the reset signal is received. Reset operation must be executed imme-
diately after power-on for devices having reset function.

µ
PD77016
2
[MEMO]
No part of this document may be copied or reproduced in any form or by any means without the prior written
consent of NEC Corporation. NEC Corporation assumes no responsibility for any errors which may appear in
this document.
NEC Corporation does not assume any liability for infringement of patents, copyrights or other intellectual property
rights of third parties by or arising from use of a device described herein or any other liability arising from use
of such device. No license, either express, implied or otherwise, is granted under any patents, copyrights or other
intellectual property rights of NEC Corporation or others.
While NEC Corporation has been making continuous effort to enhance the reliability of its semiconductor devices,
the possibility of defects cannot be eliminated entirely. To minimize risks of damage or injury to persons or
property arising from a defect in an NEC semiconductor device, customers must incorporate sufficient safety
measures in its design, such as redundancy, fire-containment, and anti-failure features.
NEC devices are classified into the following three quality grades:
"Standard", "Special", and "Specific". The Specific quality grade applies only to devices developed based on a
customer designated "quality assurance program" for a specific application. The recommended applications of
a device depend on its quality grade, as indicated below. Customers must check the quality grade of each device
before using it in a particular application.
Standard: Computers, office equipment, communications equipment, test and measurement equipment,
audio and visual equipment, home electronic appliances, machine tools, personal electronic
equipment and industrial robots
Special:
Transportation equipment (automobiles, trains, ships, etc.), traffic control systems, anti-disaster
systems, anti-crime systems, safety equipment and medical equipment (not specifically designed
for life support)
Specific:
Aircrafts, aerospace equipment, submersible repeaters, nuclear reactor control systems, life
support systems or medical equipment for life support, etc.
The quality grade of NEC devices is "Standard" unless otherwise specified in NEC's Data Sheets or Data Books.
If customers intend to use NEC devices for applications other than those specified for Standard quality grade,
they should contact an NEC sales representative in advance.
Anti-radioactive design is not implemented in this product.
M4 96.5