 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: KMI22 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |
Document Outline
- FEATURES
- DESCRIPTION
- PINNING
- QUICK REFERENCE DATA
- LIMITING VALUES
- CHARACTERISTICS
- FUNCTIONAL DESCRIPTION
- Output signal
- Definition of the protocol data bit value
- Timing of the data
- Mounting conditions
- EMC
- PACKAGE OUTLINE
- DATA SHEET STATUS
- DEFINITIONS
- DISCLAIMERS
DATA SHEET
Objective specification
2000 Sep 04
DISCRETE SEMICONDUCTORS
KMI22/1
Rotational speed sensor for
extended air gap application and
direction detection
M3D391
2000 Sep 04
2
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
FEATURES
∑
Digital current output signal
∑
Digital offset compensation
∑
Extended air gap
∑
Zero speed capability
∑
Direction detection
∑
Digital output protocol
∑
Three level output signal
∑
Additional digital input pin
∑
Wide temperature range
∑
Insensitive to vibration
∑
EMC resistant
∑
Tolerant to positioning.
DESCRIPTION
The KMI22/1 is a sensitive rotational speed sensor for the
application with ferrous gear wheels
(1)
. The sensor
consists of a magnetoresistive sensor element, a driver IC
in BIMOS technology, a digital signal conditioning IC in
highly integrated CMOS technology and a ferrite magnet.
The digital two wire current output carries a signal
proportional to the rotational speed of a gear wheel plus a
digital protocol.
PINNING
(1) The sensor contains customized integrated circuits. Usage in
hydraulic brake systems and in systems with active brake
control is forbidden. For all other applications, higher
temperature versions of up to 150
∞
C are available on
request.
CAUTION
Do not press two or more products together against their
magnetic forces.
PIN
DESCRIPTION
1
V
CC
2
V
in
3
V
-
handbook, halfpage
1
2
3
MBK766
Fig.1 Simplified outline (SOT477B).
QUICK REFERENCE DATA
SYMBOL
PARAMETER
MIN.
TYP.
MAX.
UNIT
V
CC
DC supply voltage
0
12
18
V
I
CCL
current output signal low
5.6
7.0
8.4
mA
I
CCPH
current output signal protocol high
11.2
14
16.8
mA
I
CCSH
current output signal speed high
22.4
28
33.6
mA
V
in
input voltage pin 2
0
-
100
% V
CC
d
sensing distance
0 to 4
0 to 4.5
-
mm
f
r
operating tooth frequency
0
-
2500
Hz
T
amb
ambient operating temperature
-
40
-
+85
∞
C
2000 Sep 04
3
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
LIMITING VALUES
In accordance to the Absolute Maximum Rating System (IEC 60134).
Note
1. With R
L
= 43
the device is continuously protected against wrong polarity of DC supply voltage (V
CC
) to GND;
see Fig.12.
CHARACTERISTICS
T
amb
= 25
∞
C; V
CC
= 12 V; d = 2.1 mm; f
t
= 2 kHz; test circuit: see Fig.12; R
L
= 43
; sensor positioning: see Fig.13;
gear wheel: module 2 mm; material 1.0715; unless otherwise specified.
SYMBOL
PARAMETER
CONDITIONS
MIN.
MAX.
UNIT
V
CC
DC supply voltage between
leads 1 + 3
T
amb
=
-
40 to +85
∞
C; R
L
= 43
;
see Fig.12
0
18
V
V
in
input voltage pin 2
T
amb
=
-
40 to + 85
∞
C
V
-
V
CC
V
T
stg
storage temperature range
-
65
+150
∞
C
T
amb
ambient operating temperature
-
40
+85
∞
C
T
sld
soldering temperature
t < 10 s
-
260
∞
C
output short-circuit duration
V
CC
to GND (see Fig.12)
continuous
short-circuit duration
pin 2 to pin 1 and pin 2 to pin 3
continuous
wrong polarity
T
amb
=
-
40 to +65
∞
C; R
L
= 43
;
note 1
continuous
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT
I
L
current output low
T =
-
40 to +85
∞
C;
see Figs 6 and 8
5.6
7
8.4
mA
I
PH
current output protocol high
T =
-
40 to +85
∞
C;
see Figs 6 and 8;
11.2
14
16.8
mA
I
SH
current output speed high
T =
-
40 to +85
∞
C;
see Figs 6 and 8;
22.4
28
33.6
mA
t
r
output signal rise time
C
L
= 100 pF; 10 to 90% value
-
0.5
-
µ
s
t
f
output signal fall time
C
L
= 100 pF; 90 to 10% value
-
0.5
-
µ
s
f
t
operating tooth frequency
for both rotation directions
T =
-
40 to +85
∞
C
0
-
2500
Hz
d
in 0 Hz
sensing distance in initial mode for
signals > 0 Hz
see Fig.13
0 to 2.5 0 to 2.9
-
mm
d
in 1 Hz
sensing distance in initial mode for
signals > 1 Hz
see Fig.13
0 to 3.5 0 to 3.9
-
mm
d
dir
sensing distance for safe direction
detection
see Fig.13
0 to 3
0 to 3.4
-
mm
d
act
sensing distance in active mode
see Fig.13
0 to 4
0 to 4.5
-
mm
in 0 Hz
duty cycle in initial mode for
signals > 0 Hz
T =
-
40 to +85
∞
C; see Fig.5
20
50
80
%
in 1 Hz
duty cycle in initial mode for
signals > 1 Hz
T =
-
40 to +85
∞
C; see Fig.5
20
50
80
%
act
duty cycle in active mode
T =
-
40 to +85
∞
C; see Fig.5
40
50
60
%
2000 Sep 04
4
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
FUNCTIONAL DESCRIPTION
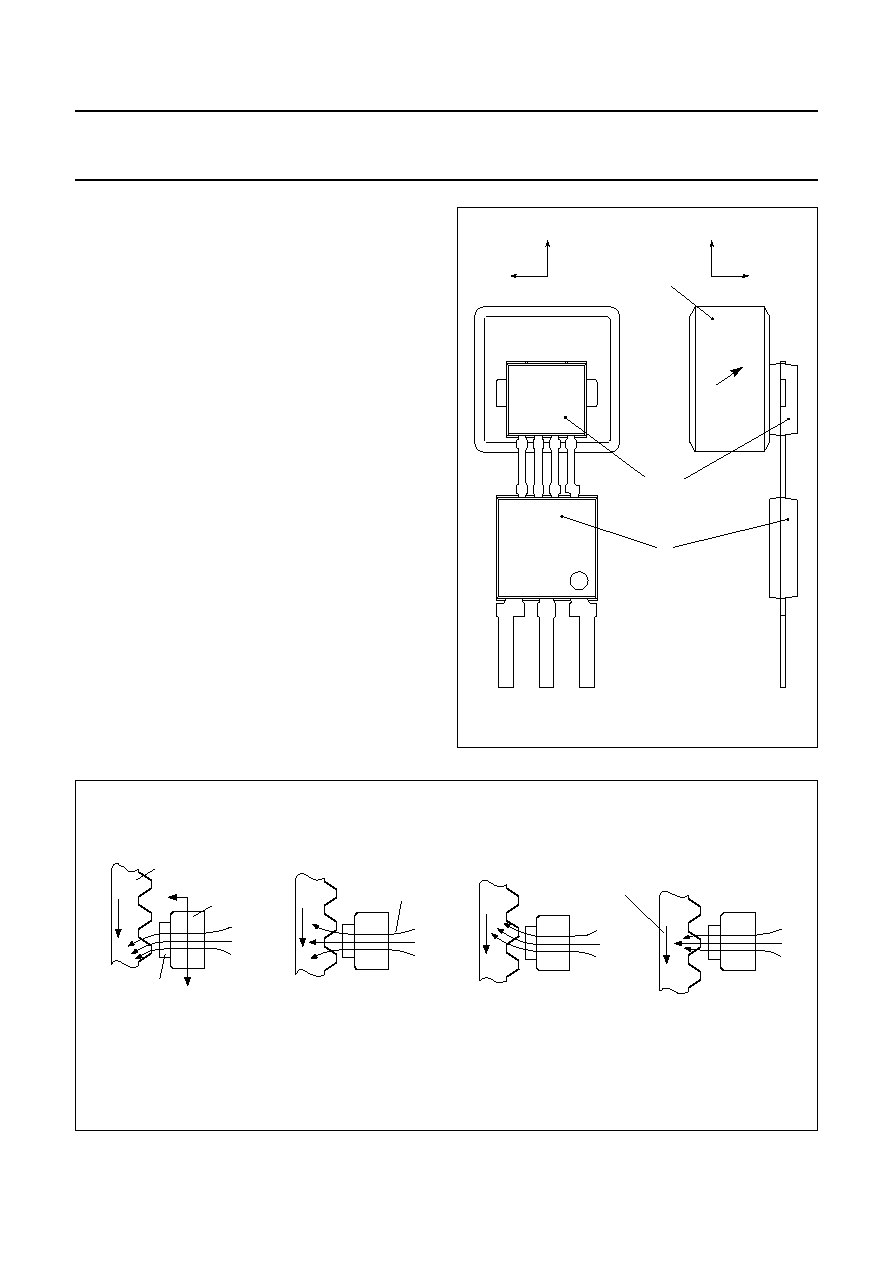
The KMI22/1 is sensitive to the motion of ferrous gear
wheels. The functional principle is shown in Fig.3. Due to
the effect of flux bending the different directions of
magnetic field lines in the magnetoresistive sensor
element will cause an electrical signal. Because of the
chosen sensor orientation and the direction of ferrite
magnetization the KMI22/1 is sensitive to movement in
the `y' direction in front of the sensor only (see Fig.2).
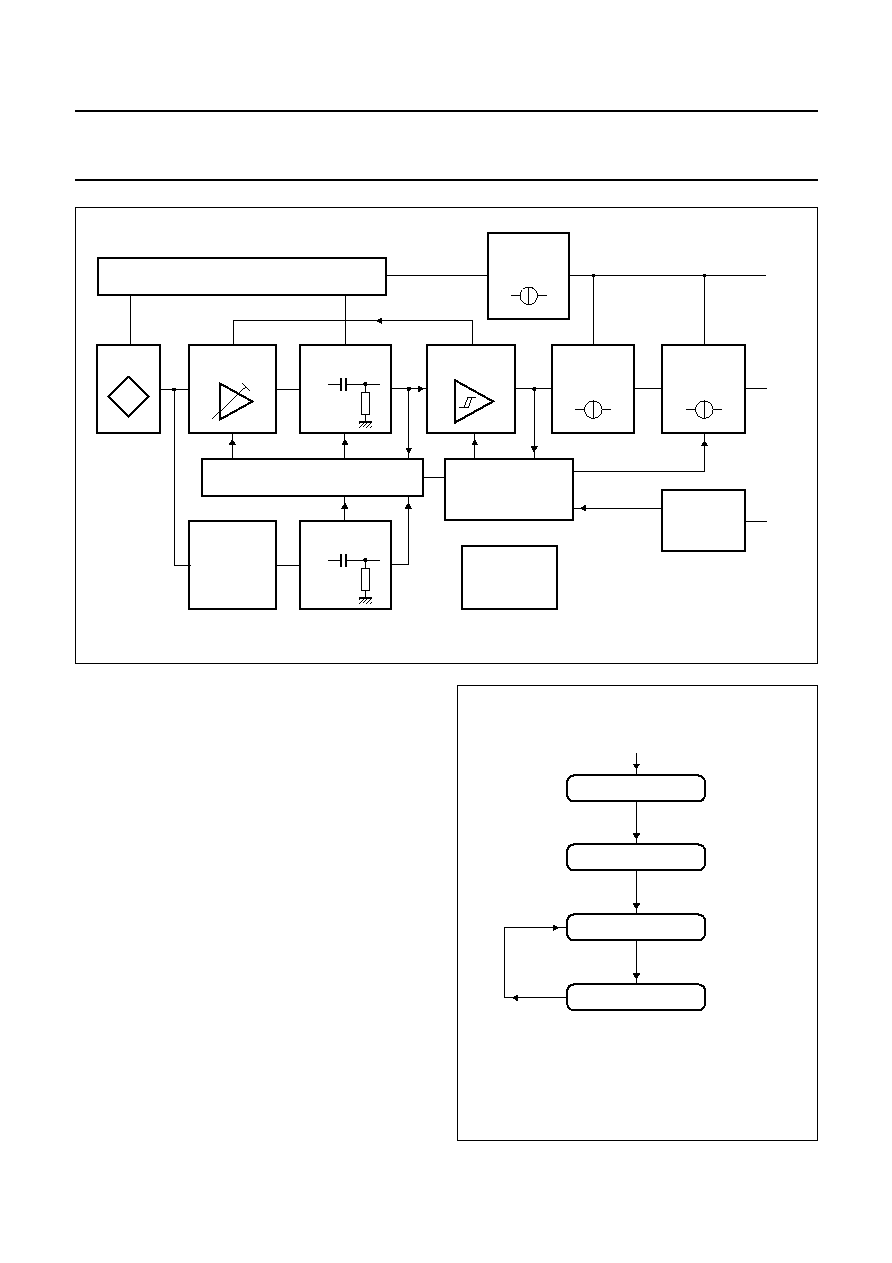
The KMI22/1 contains a magnetoresistive sensor element
and two ICs: a Position Detector IC (PDIC) and a Line
Driver IC (LDIC). The sensor signal is fed into the PDIC
which converts the signal to the digital domain, applies
digital compensation and additional processing. The LDIC
contains three current sources (one constant, two
switchable), a voltage control unit and a level shifter to
provide the signal V
in
to the PDIC (see Fig.4). The digital
output from the device is the combination of the speed
pulse and an 8-bit data protocol.
handbook, halfpage
y
z
x
x
IC
sensor
magnet with
direction of
magnetization
MBK767
Fig.2 Component detail of the KMI22/1.
handbook, full pagewidth
gear wheel
magnet
magnetic
field lines
(a)
(b)
(c)
direction
of
motion
(d)
MRA957
sensor
y
z
Fig.3 Functional principle.
2000 Sep 04
5
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
handbook, full pagewidth
MBL235
SUM POINT
DIGITAL PROTOCOL
UNIT
ON-CHIP
OSCILLATOR
LEVEL
SHIFTER
SMART
COMPARATOR
OFFSET
CANCELLATION
OFFSET
CANCELLATION
Fc = 0 Hz
Fc = 0 Hz
ADJUSTABLE
AMPLIFIER
SENSOR
DIGITAL CONTROL UNIT
VOLTAGE CONTROL
SWITCHABLE
CURRENT
SOURCE
VCC
Vin
CONSTANT
CURRENT
SOURCE
SWITCHABLE
CURRENT
SOURCE
V
-
Fig.4 Block diagram.
Figure 5 shows the digital compensation function in
algorithmic format. After power on the sensor system is
running in INITIAL MODE 0 Hz. The sensor signal is
preamplified but not offset compensated. The output
signal represents the specified sensing distances (see
Chapter "Characteristics") for every tooth of the wheel,
totally speed independent.
When d
in 0 Hz
< d < d
in 1 Hz
the system must first detect the
sensor signal amplitudes to compensate for the sensor
offset INITIAL MODE 1 Hz. An output signal is produced
(first compensation run finished) latest after 11 wheel
teeth, with a frequency above 1 Hz have been sensed.
After detecting the teeth in initial mode the PDIC changes
to the ACTIVE MODE and the sensor signal is
permanently offset compensated. The available sensing
distance is increased to d
act
. Quitting ACTIVE MODE is
caused by power off or by the teeth frequency falling below
1 Hz. The system is locked into COMPENSATION MODE
and continues to detect every wheel tooth down to zero
speed.
MBL228
INITIAL MODE 0 Hz
Power on
locked data
dmax = din 0 Hz
dmax = dact
dmax = din 1 Hz
dmax = din 0 Hz
maximum 11 periods
and fs
>
1 Hz
fs
>
1 Hz
fs
<
1 Hz
INITIAL MODE 1 Hz
ACTIVE MODE
COMPENSATION MODE
Fig.5 PDIC function algorithm.
2000 Sep 04
6
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
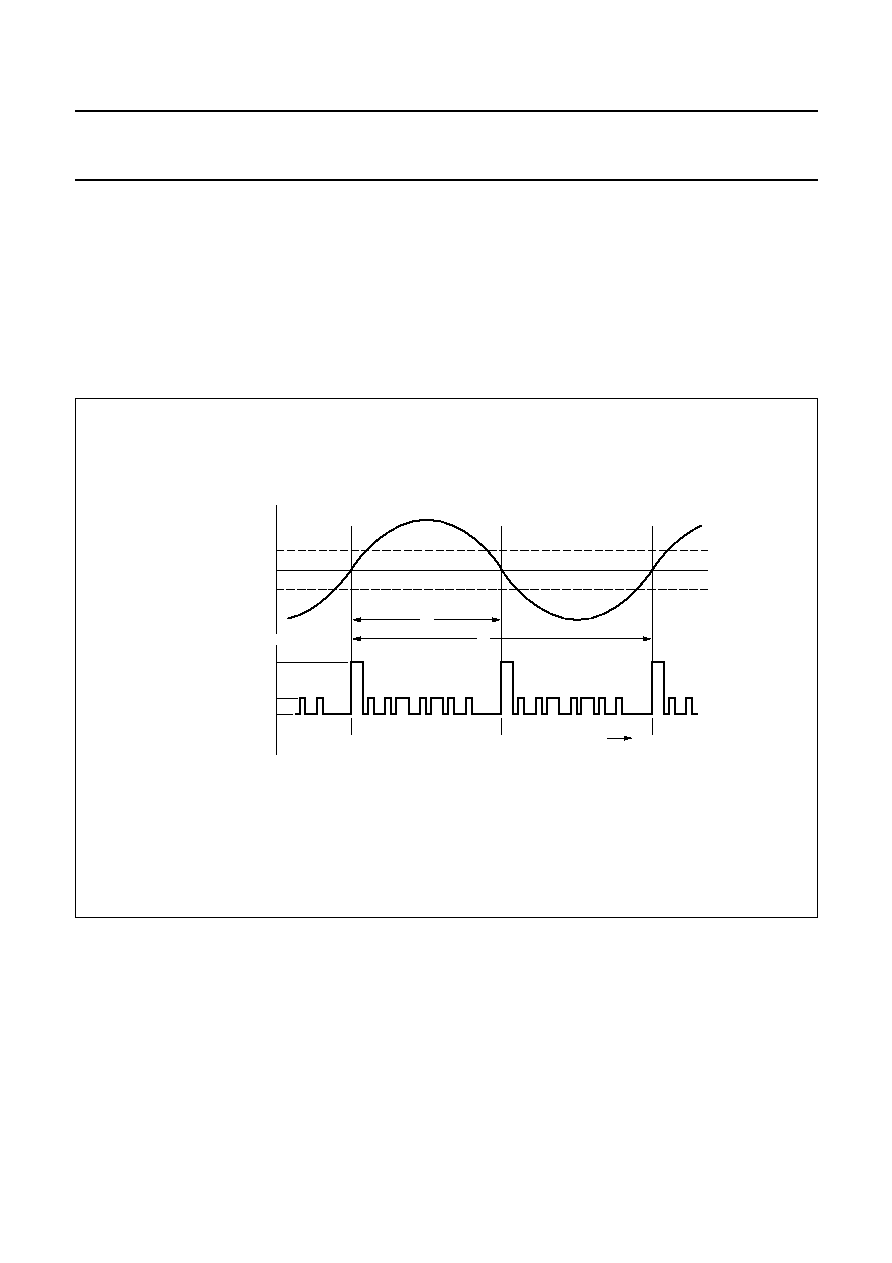
Output signal
The output signal is shown in Fig.6. The signal contains a
speed signal and an 8-bit protocol following the speed
signal. This serial transmission, using the Manchester
Code to encode the bits, is realized by modulating the
3-level output current of the sensor system. A short pulse
of the highest current level I
SH
represents the gear wheel
structure, whereas the protocol bits are coded by using the
protocol current level I
PH
.
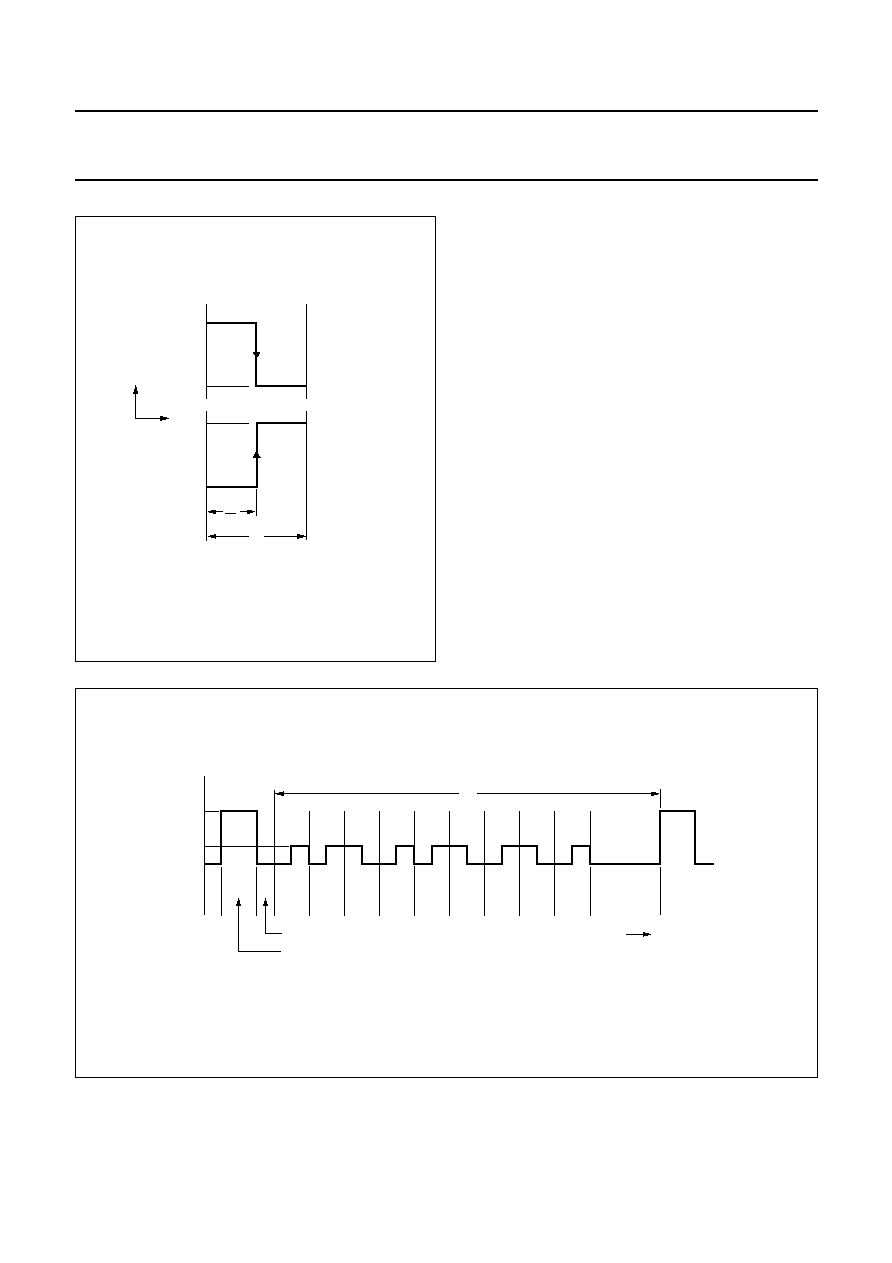
Definition of the protocol data bit value
Figure 7 shows the definition of the protocol data bit value.
The protocol data bit has the bit length t
d
. It is split into two
half signal parts by the current edge in the middle of the
data bit. Data bit HIGH is defined by the rising current edge
from I
L
to I
PH
. Data bit LOW is defined by the falling current
edge. Any data bit without a current edge at its middle is
invalid.
handbook, full pagewidth
sensor
output signal
and
hysteresis of
comparator
modulated
output current
of electronics
IPH
ISH
+
HYST
0
-
HYST
IL
tp
T
MBL233
time
Fig.6 Output signal.
t
p
T
----
100%
◊
=
2000 Sep 04
7
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
Timing of the data
The data timing is shown in Figs 8 and 9.
O
PERATION AT NORMAL SPEED
The wheel speed pulse is generated whenever a rising or
falling edge of the wheel signal is detected. The pulse
length is t
s
. Following the wheel speed pulse a pre-bit is
sent. It is always low and has the length t
p
.
After the pre-bit the sensor logic begins to transfer the data
protocol bits. The data protocol transferred by the sensor
logic consists of 9 data bits (8 data bits and a parity bit;
see Table 3). The data bit is length t
d
and must contain a
current edge its middle.
Following the data protocol bits an end bit with length
0.5
◊
t
d
is transferred. The end bit is always low, switching
the current output to I
L
until the arrival of the next wheel
speed pulse leading edge.
handbook, halfpage
protocol bit = LOW
current
time
IPH
IL
IPH
IL
protocol bit = HIGH
td
td
2
MBL232
Fig.7 Definition of protocol data bit value.
handbook, full pagewidth
MBL230
high
pre-bit = low
wheel speed pulse
time
high
low
high
high
low
high
low
high
td
tp
td
td
td
td
td
td
td
td
td
db0
db1
db2
db3
db4
db5
db6
db7
parity
IPH
ISH
IL
tw
Fig.8 Timing diagram of data protocol at normal wheel speed.
2000 Sep 04
8
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
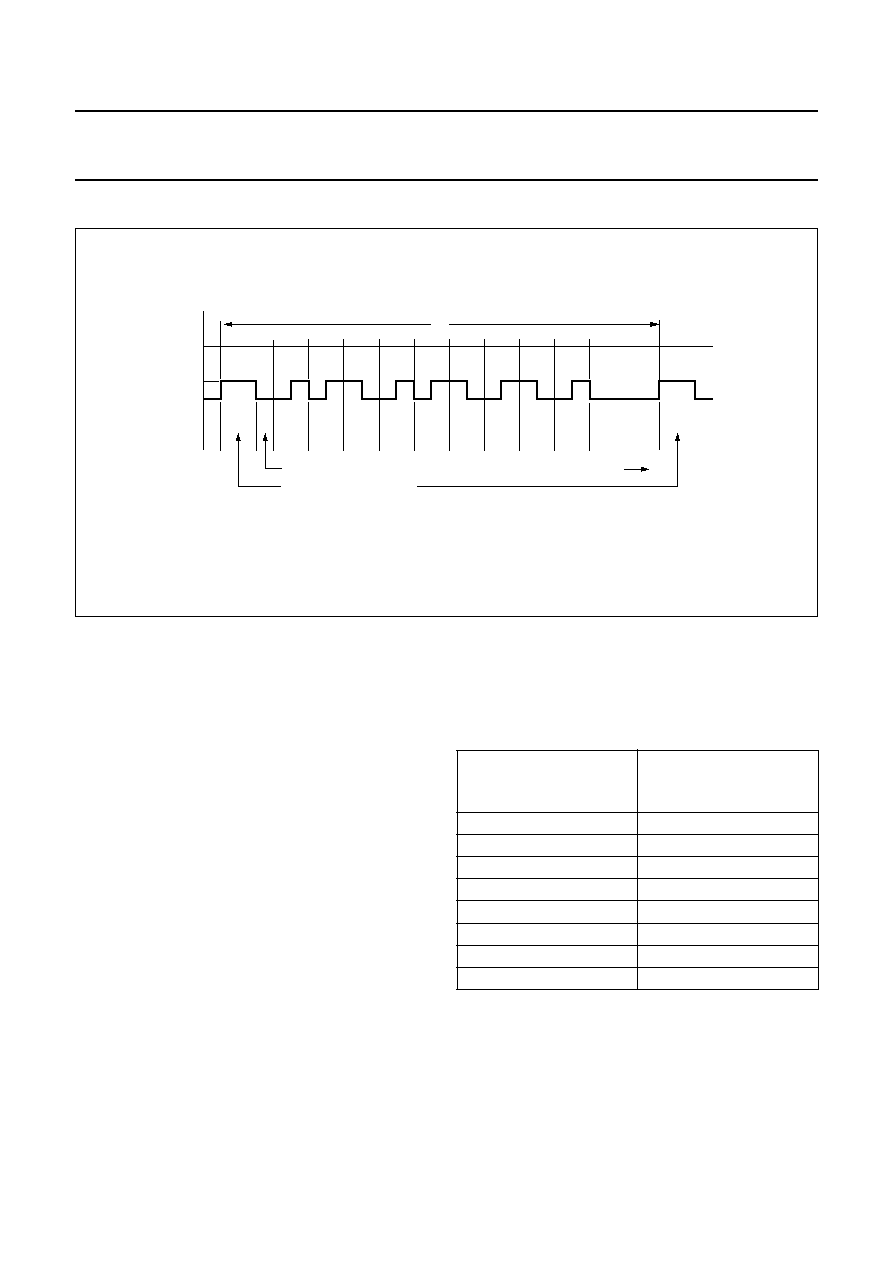
O
PERATION AT VERY LOW SPEED
handbook, full pagewidth
MBL231
high
pre-bit = low
pseudo wheel speed pulse
time
high
low
high
high
low
high
low
high
td
tp
td
td
td
td
td
td
td
td
td
db0
db1
db2
db3
db4
db5
db6
db7
parity
IPH
ISH
IL
t2
Fig.9 Timing diagram of data protocol at very low speed.
In the event that no wheel speed pulse is detected during
time t
2
the protocol transfer is executed as described
previously, except that a pseudo wheel speed pulse with
protocol level high of I
PH
instead of I
SH
is substituted for
the wheel speed pulse (see Fig.9).
T
IMING AT HIGH SPEED
The pulse width of data bits t
d
is fixed, whereas the time
interval between wheel speed pulses is not. The higher the
speed of the wheel, the shorter the period t
w
, therefore not
all data bits can be transferred at high wheel speed.
In this situation, calculations are made based on the
current wheel speed pulse interval (n) to determine how
many will fit into this window. This data is then used to
determine the number of data bits that will be transferred
during the next wheel speed pulse interval (n + 2), as
shown in Table 1.
During time interval n + 2 the sensor current output
consists of the wheel speed pulse, pre-bit, data bits (less
than 9 bits; see Table 1), and the end bit data.
Referring to Table 1 it can be seen that the minimum
number of data bits that will be transferred during period
n + 2 is 2. If 3 or less data bits are to be transferred, the
end bit length will be reduced to 0.
Table 1
Calculation of the number of protocol bits
MAXIMUM NUMBER
OF t
d
IN THE CURRENT
TIME INTERVAL n (t
w
)
PROTOCOL BITS FOR
TIME INTERVAL n + 2
<5
2
5
3
6
4
7
5
8
6
9
7
10
8
>10
8

2000 Sep 04
9
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
P
ULSE AND PROTOCOL DEFINITIONS
Table 2
Pulse and protocol timing
T
amb
=
-
40 to +85
∞
C; V
CC
= 12 V; test circuit: see Fig.12; R
L
= 43
; unless otherwise specified.
Table 3
Definition of data bits
Notes
1. Air gap reserve: this bit of the protocol indicates that the processed signal amplitude is smaller than twice the
minimum allowed signal amplitude (see Fig.10). If this bit is flagged then the air gap is nearly used up, which means
that the sensor system will stop working for a further reduction of the signal amplitude.
2. Correct direction recognition is guaranteed for sensing distance: see Chapter "Characteristics".
3. Bits SD0 to SD2: These bits are used to quantify the signal amplitude and therefore the air gap can be divided into
8 sections (see Fig.10). For a temperature sweep over the complete specified range the air gap information may
change by 2 LSBs due to the temperature coefficient of the sensor signal amplitude.
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT
t
s
speed signal pulse width
see Figs 8 and 9
40
50
60
µ
s
t
p
pre-bit pulse width
see Figs 8 and 9
20
25
30
µ
s
t
d
data pulse width
see Figs 8 and 9
40
50
60
µ
s
t
2
time between pseudo speed pulses
see Fig.9
120
150
180
ms
DATA BIT
SYMBOL
DESCRIPTION
REMARK
0
AR
air gap reserve
logic 1 when distance too large; note 1
1
M
mode state
logic 1 when in initial mode, 0 when in active mode
2
V
in
digital input state
logic 1 when V
in
= low; default
3
VDR
validity direction recognition
logic 1 when direction bit is valid; note 2
4
DR
direction recognition
logic 1 when direction is positive (see Fig.10)
5
SD0
sensing distance bit 0
reflects actual sensing distance; LSB; note 3; Fig.10
6
SD1
sensing distance bit 1
reflects actual sensing distance; note 3; Fig.10
7
SD2
sensing distance bit 2
reflects actual sensing distance; MSB; note 3; Fig.10
8
P
parity
`high' for even parity: P = XOR (data 0,
data 1 to data 7)

2000 Sep 04
10
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
handbook, full pagewidth
0
20
40
60
80
100
10
2
10
1
MBL229
air gap between sensor and target (%)
protocol bit 0:
air gap reserve = 1
sensor
amplitude
(%)
protocol bits 5 to 7:
air gap measurement
(MSB first)
111
110
101
100
011
010
001
000
Fig.10 Sensor amplitude versus air gap.
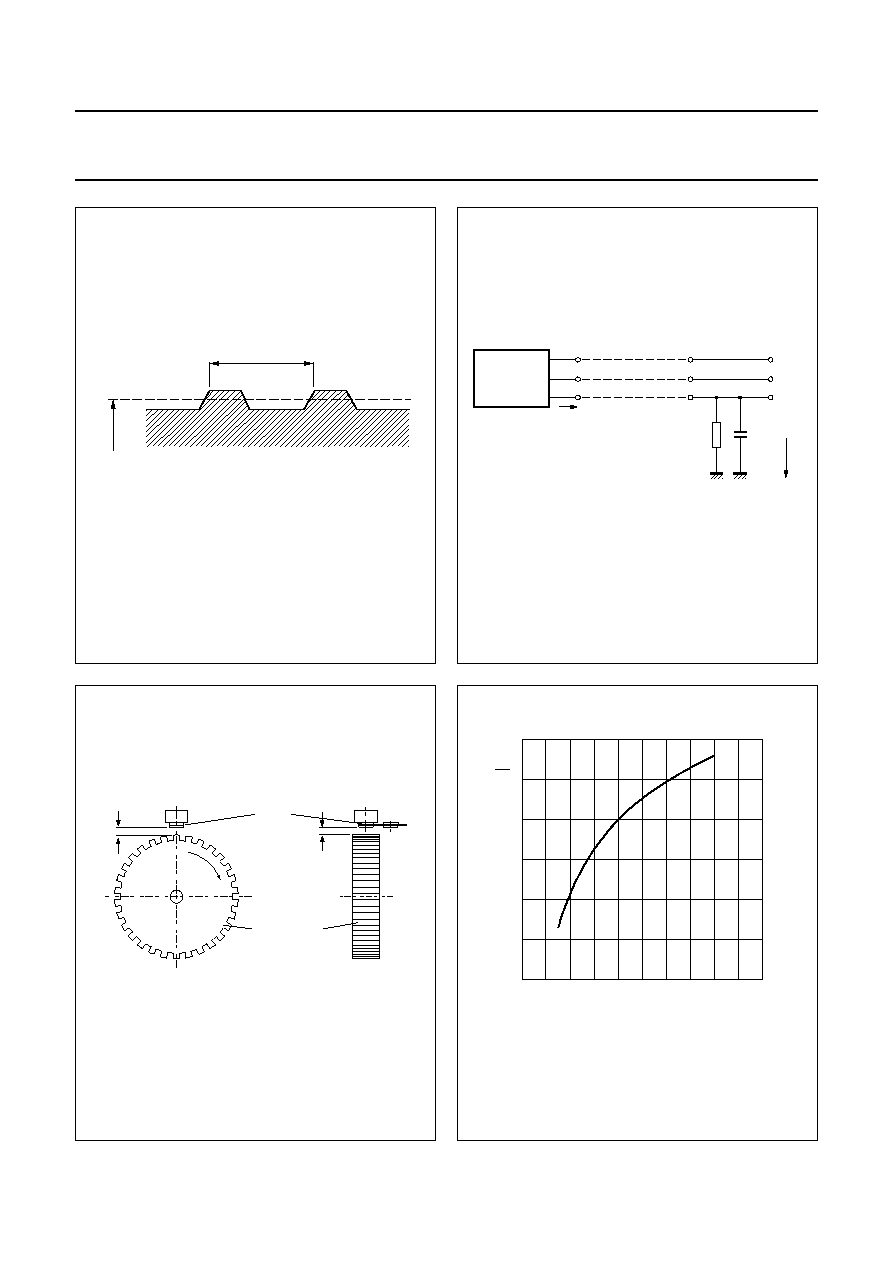
Mounting conditions
The recommended sensor position in front of a gear wheel
is shown in Fig.13. The distance `d' is measured between
the sensor front and the tip of a gear wheel tooth. The
KMI22/1 senses ferrous indicators like gear wheels in the
y direction only (no rotational symmetry of the sensor);
see Fig.2. The symmetrical reference axis of the sensor
corresponds to the axis of the ferrite magnet.
Table 4
Gear wheel dimensions
Note
1. For conversion from ASA to DIN: m = 25.4 mm/DP;
p = 25.4 mm
◊
CP.
SYMBOL
DESCRIPTION
UNIT
German DIN
z
number of teeth
d
diameter
mm
m
module m = d/z
mm
p
pitch
= p
◊
m
mm
ASA; note 1
PD
pitch diameter (d in inches)
inch
DP
diametric pitch DP = z/PD
inch
-
1
CP
circular pitch CP =
/DP
inch
2000 Sep 04
11
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
handbook, halfpage
pitch
pitch
diameter
MRA964
Fig.11 Gear wheel dimensions.
pitch = module
◊
module
pitch diameter
number of teeth
-------------------------------------------
=
MBL234
VCC
RL
CL
Vin
V
-
SENSOR
GND
I CC
Fig.12 Test and application circuit.
handbook, halfpage
gear wheel
sensor
d
d
MRA963
Fig.13 Sensor positioning.
Centre die position: see Chapter "Package outline".
handbook, halfpage
module m (mm)
1
0.5
1.5
0
0
1
2
3
4
5
d
MRA966
d0
Fig.14 Normalized maximum sensing distance as
a function of gear wheel module; typical
values.
d
0
= measuring distance for a gear wheel with module m = 2 mm.
2000 Sep 04
12
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
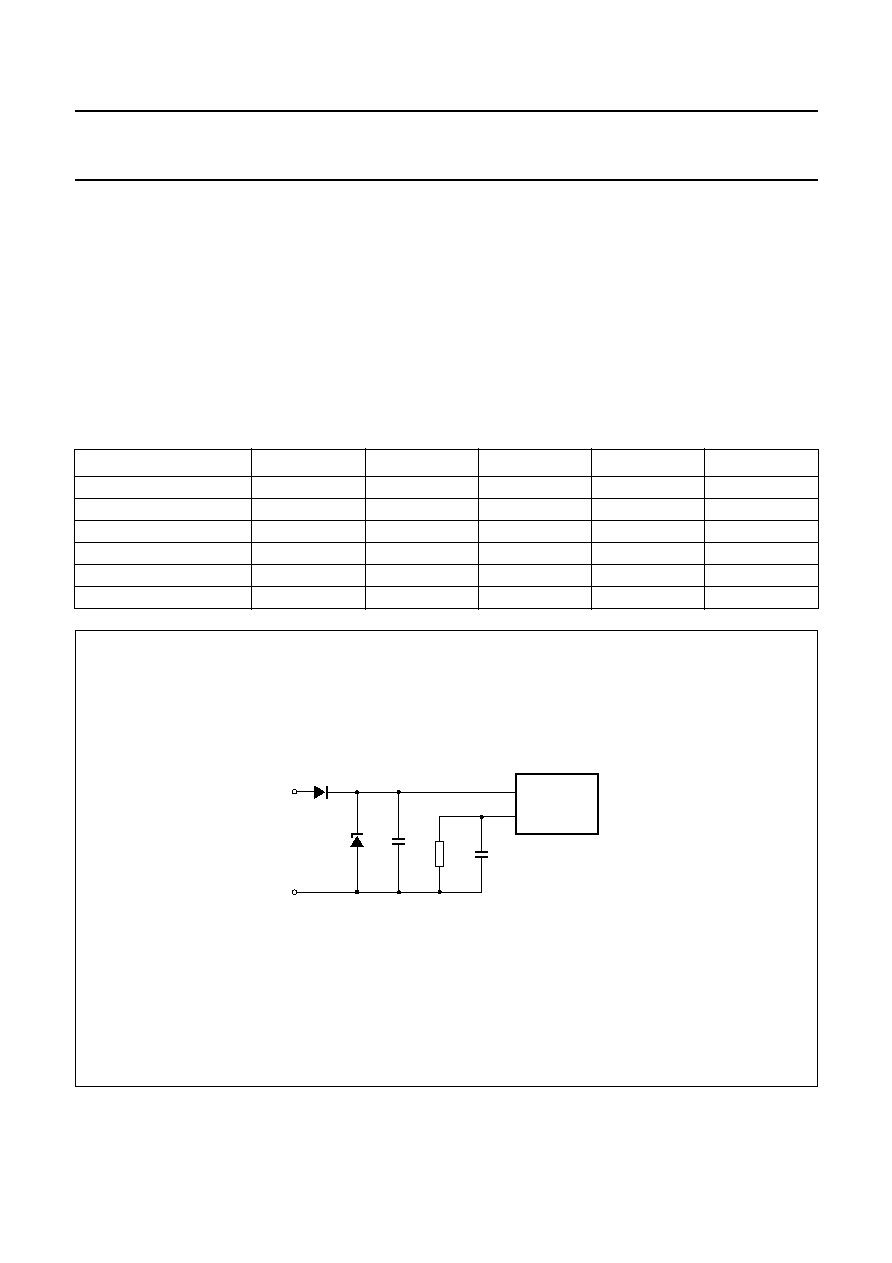
EMC
Figure 15 shows a recommended application circuit for
automotive applications. It provides a protection interface
to meet Electromagnetic Compatibility (EMC) standards
and safeguard against voltage spikes. Table 5 lists the
tests which are applicable to this circuit and the achieved
class of functional status. Protection against `load dump'
(test pulses 5 according to
"DIN 40839") means a very
high demand on the protection circuit and requires a
suitable suppressor diode with sufficient energy
absorption capability.
The board net often contains a central load dump
protection that makes such a device in the protection
circuit of the sensor module unnecessary.
Tests for electrostatic discharge (ESD) were conducted in
line with
"IEC 801-2" to demonstrate the KMI22/1's
handling capabilities. The
"IEC 801-2" test conditions
were: C = 150 pF, R = 150
, V = 4 kV.
Electromagnetic disturbances with fields up to 150 V/m
and f = 1 GHz (ref.
"DIN 40839") have no influence on
performance.
Table 5
EMC test results
EMC REF. DIN 40839
SYMBOL
MIN. (V)
MAX. (V)
REMARKS
CLASS
Test pulse 1
V
LD
-
100
-
t
d
= 2 ms
C
Test pulse 2
V
LD
-
100
t
d
= 0.2 ms
A
Test pulse 3a
V
LD
-
150
-
t
d
= 0.1
µ
s
A
Test pulse 3b
V
LD
-
100
t
d
= 0.1
µ
s
A
Test pulse 4
V
LD
-
7
-
t
d
= 130 ms
B
Test pulse 5
V
LD
-
120
t
d
= 400 ms
B
handbook, full pagewidth
MGT534
CL
RL
C1
43
100
nF
100
nF
D2
D1
BZTO3G36
1N4001/3
+
V
GND
-
V
VCC
SENSOR
Fig.15 EMC: test and application circuit.
2000 Sep 04
13
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
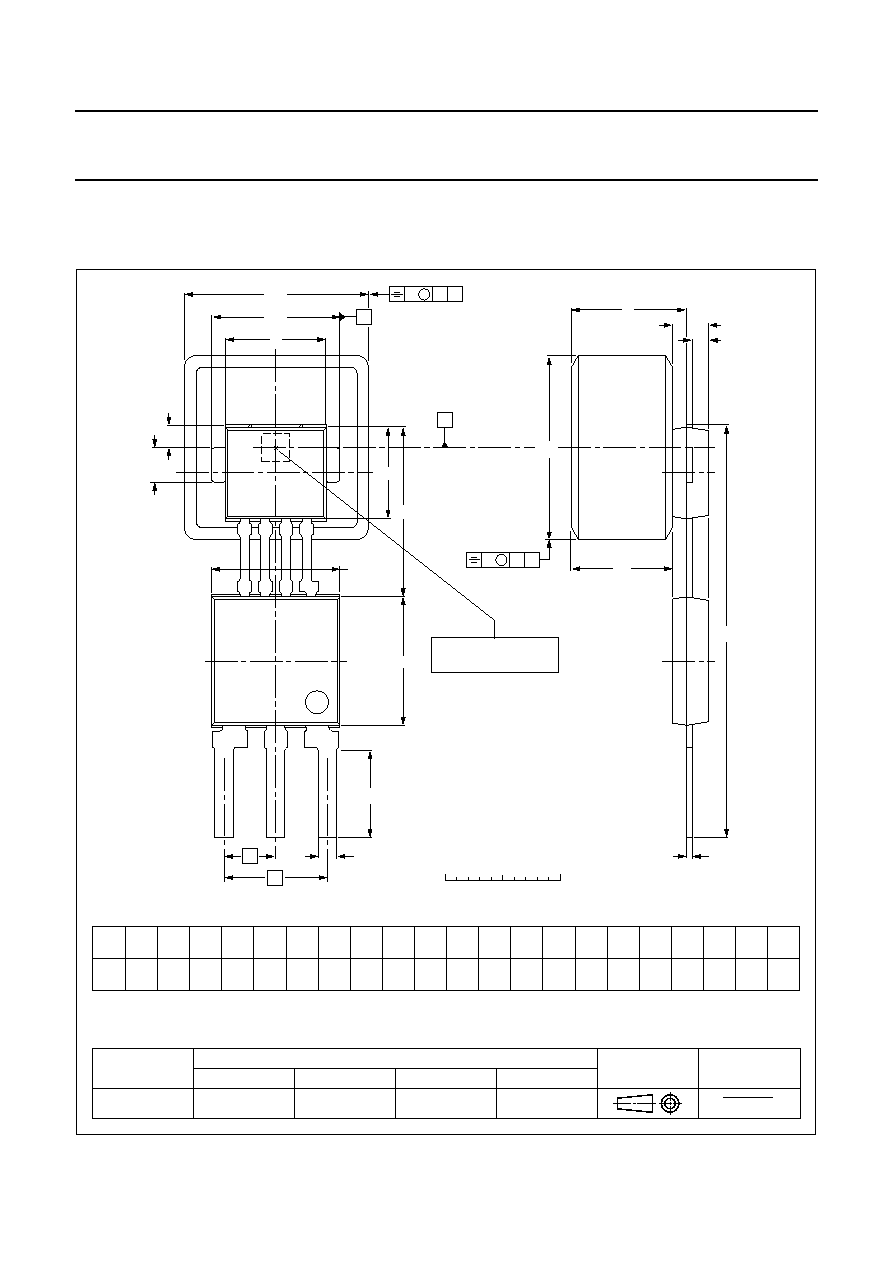
PACKAGE OUTLINE
UNIT
bp
c
Q
L2
L1
v
REFERENCES
OUTLINE
VERSION
EUROPEAN
PROJECTION
ISSUE DATE
IEC
JEDEC
EIAJ
mm
1.7
1.4
0.8
0.7
bp1
1.57
1.47
5.7
5.5
4.1
3.9
0.3
0.24
1.2
0.9
3.9
3.5
M1
8.15
7.85
M2
8.15
7.85
M3
(1)
4.7
4.3
L
7.55
7.25
D
(2)
D1
(2)
4.5
4.3
E
(2)
5.7
5.5
4.6
4.4
E1
(2)
18.2
17.8
HE
5.6
5.5
HE1
K
max.
5.37
e
2.35
2.15
e1
0.25
0.75
0.65
DIMENSIONS (mm are the original dimensions)
SOT477B
99-09-23
00-08-31
0
2.5
5 mm
scale
A
(1)
Plastic single-ended multi-chip package;
magnetized ferrite magnet (8 x 8 x 4.5 mm); 4 interconnections; 3 in-line leads
SOT477B
e
1
2
3
e1
E
E1
HE1
L1
D
L
bp1
D1
SENSOR DIE POSITION
*
centre of reading point
HE
M1
L2
bp
c
v
M
A B
Q
v
M
A B
A
K
M2
M3
B
A
Notes
1. Glue thickness not included.
2. Plastic or metal protrusions of 0.15 mm maximum per side are not included.
2000 Sep 04
14
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
DATA SHEET STATUS
Note
1. Please consult the most recently issued data sheet before initiating or completing a design.
DATA SHEET STATUS
PRODUCT
STATUS
DEFINITIONS
(1)
Objective specification
Development
This data sheet contains the design target or goal specifications for
product development. Specification may change in any manner without
notice.
Preliminary specification
Qualification
This data sheet contains preliminary data, and supplementary data will be
published at a later date. Philips Semiconductors reserves the right to
make changes at any time without notice in order to improve design and
supply the best possible product.
Product specification
Production
This data sheet contains final specifications. Philips Semiconductors
reserves the right to make changes at any time without notice in order to
improve design and supply the best possible product.
DEFINITIONS
Short-form specification
The data in a short-form
specification is extracted from a full data sheet with the
same type number and title. For detailed information see
the relevant data sheet or data handbook.
Limiting values definition
Limiting values given are in
accordance with the Absolute Maximum Rating System
(IEC 60134). Stress above one or more of the limiting
values may cause permanent damage to the device.
These are stress ratings only and operation of the device
at these or at any other conditions above those given in the
Characteristics sections of the specification is not implied.
Exposure to limiting values for extended periods may
affect device reliability.
Application information
Applications that are
described herein for any of these products are for
illustrative purposes only. Philips Semiconductors make
no representation or warranty that such applications will be
suitable for the specified use without further testing or
modification.
DISCLAIMERS
Life support applications
These products are not
designed for use in life support appliances, devices, or
systems where malfunction of these products can
reasonably be expected to result in personal injury. Philips
Semiconductors customers using or selling these products
for use in such applications do so at their own risk and
agree to fully indemnify Philips Semiconductors for any
damages resulting from such application.
Right to make changes
Philips Semiconductors
reserves the right to make changes, without notice, in the
products, including circuits, standard cells, and/or
software, described or contained herein in order to
improve design and/or performance. Philips
Semiconductors assumes no responsibility or liability for
the use of any of these products, conveys no licence or title
under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that
these products are free from patent, copyright, or mask
work right infringement, unless otherwise specified.

2000 Sep 04
15
Philips Semiconductors
Objective specification
Rotational speed sensor for extended air
gap application and direction detection
KMI22/1
NOTES

© Philips Electronics N.V.
SCA
All rights are reserved. Reproduction in whole or in part is prohibited without the prior written consent of the copyright owner.
The information presented in this document does not form part of any quotation or contract, is believed to be accurate and reliable and may be changed
without notice. No liability will be accepted by the publisher for any consequence of its use. Publication thereof does not convey nor imply any license
under patent- or other industrial or intellectual property rights.
Internet: http://www.semiconductors.philips.com
2000
70
Philips Semiconductors ≠ a worldwide company
For all other countries apply to: Philips Semiconductors,
Marketing Communications, Building BE-p, P.O. Box 218, 5600 MD EINDHOVEN,
The Netherlands, Fax. +31 40 27 24825
Argentina: see South America
Australia: 3 Figtree Drive, HOMEBUSH, NSW 2140,
Tel. +61 2 9704 8141, Fax. +61 2 9704 8139
Austria: Computerstr. 6, A-1101 WIEN, P.O. Box 213,
Tel. +43 1 60 101 1248, Fax. +43 1 60 101 1210
Belarus: Hotel Minsk Business Center, Bld. 3, r. 1211, Volodarski Str. 6,
220050 MINSK, Tel. +375 172 20 0733, Fax. +375 172 20 0773
Belgium: see The Netherlands
Brazil: see South America
Bulgaria: Philips Bulgaria Ltd., Energoproject, 15th floor,
51 James Bourchier Blvd., 1407 SOFIA,
Tel. +359 2 68 9211, Fax. +359 2 68 9102
Canada: PHILIPS SEMICONDUCTORS/COMPONENTS,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
China/Hong Kong: 501 Hong Kong Industrial Technology Centre,
72 Tat Chee Avenue, Kowloon Tong, HONG KONG,
Tel. +852 2319 7888, Fax. +852 2319 7700
Colombia: see South America
Czech Republic: see Austria
Denmark: Sydhavnsgade 23, 1780 COPENHAGEN V,
Tel. +45 33 29 3333, Fax. +45 33 29 3905
Finland: Sinikalliontie 3, FIN-02630 ESPOO,
Tel. +358 9 615 800, Fax. +358 9 6158 0920
France: 51 Rue Carnot, BP317, 92156 SURESNES Cedex,
Tel. +33 1 4099 6161, Fax. +33 1 4099 6427
Germany: Hammerbrookstraþe 69, D-20097 HAMBURG,
Tel. +49 40 2353 60, Fax. +49 40 2353 6300
Hungary: see Austria
India: Philips INDIA Ltd, Band Box Building, 2nd floor,
254-D, Dr. Annie Besant Road, Worli, MUMBAI 400 025,
Tel. +91 22 493 8541, Fax. +91 22 493 0966
Indonesia: PT Philips Development Corporation, Semiconductors Division,
Gedung Philips, Jl. Buncit Raya Kav.99-100, JAKARTA 12510,
Tel. +62 21 794 0040 ext. 2501, Fax. +62 21 794 0080
Ireland: Newstead, Clonskeagh, DUBLIN 14,
Tel. +353 1 7640 000, Fax. +353 1 7640 200
Israel: RAPAC Electronics, 7 Kehilat Saloniki St, PO Box 18053,
TEL AVIV 61180, Tel. +972 3 645 0444, Fax. +972 3 649 1007
Italy: PHILIPS SEMICONDUCTORS, Via Casati, 23 - 20052 MONZA (MI),
Tel. +39 039 203 6838, Fax +39 039 203 6800
Japan: Philips Bldg 13-37, Kohnan 2-chome, Minato-ku,
TOKYO 108-8507, Tel. +81 3 3740 5130, Fax. +81 3 3740 5057
Korea: Philips House, 260-199 Itaewon-dong, Yongsan-ku, SEOUL,
Tel. +82 2 709 1412, Fax. +82 2 709 1415
Malaysia: No. 76 Jalan Universiti, 46200 PETALING JAYA, SELANGOR,
Tel. +60 3 750 5214, Fax. +60 3 757 4880
Mexico: 5900 Gateway East, Suite 200, EL PASO, TEXAS 79905,
Tel. +9-5 800 234 7381, Fax +9-5 800 943 0087
Middle East: see Italy
Netherlands: Postbus 90050, 5600 PB EINDHOVEN, Bldg. VB,
Tel. +31 40 27 82785, Fax. +31 40 27 88399
New Zealand: 2 Wagener Place, C.P.O. Box 1041, AUCKLAND,
Tel. +64 9 849 4160, Fax. +64 9 849 7811
Norway: Box 1, Manglerud 0612, OSLO,
Tel. +47 22 74 8000, Fax. +47 22 74 8341
Pakistan: see Singapore
Philippines: Philips Semiconductors Philippines Inc.,
106 Valero St. Salcedo Village, P.O. Box 2108 MCC, MAKATI,
Metro MANILA, Tel. +63 2 816 6380, Fax. +63 2 817 3474
Poland: Al.Jerozolimskie 195 B, 02-222 WARSAW,
Tel. +48 22 5710 000, Fax. +48 22 5710 001
Portugal: see Spain
Romania: see Italy
Russia: Philips Russia, Ul. Usatcheva 35A, 119048 MOSCOW,
Tel. +7 095 755 6918, Fax. +7 095 755 6919
Singapore: Lorong 1, Toa Payoh, SINGAPORE 319762,
Tel. +65 350 2538, Fax. +65 251 6500
Slovakia: see Austria
Slovenia: see Italy
South Africa: S.A. PHILIPS Pty Ltd., 195-215 Main Road Martindale,
2092 JOHANNESBURG, P.O. Box 58088 Newville 2114,
Tel. +27 11 471 5401, Fax. +27 11 471 5398
South America: Al. Vicente Pinzon, 173, 6th floor,
04547-130 S√O PAULO, SP, Brazil,
Tel. +55 11 821 2333, Fax. +55 11 821 2382
Spain: Balmes 22, 08007 BARCELONA,
Tel. +34 93 301 6312, Fax. +34 93 301 4107
Sweden: Kottbygatan 7, Akalla, S-16485 STOCKHOLM,
Tel. +46 8 5985 2000, Fax. +46 8 5985 2745
Switzerland: Allmendstrasse 140, CH-8027 ZÐRICH,
Tel. +41 1 488 2741 Fax. +41 1 488 3263
Taiwan: Philips Semiconductors, 5F, No. 96, Chien Kuo N. Rd., Sec. 1,
TAIPEI, Taiwan Tel. +886 2 2134 2451, Fax. +886 2 2134 2874
Thailand: PHILIPS ELECTRONICS (THAILAND) Ltd.,
60/14 MOO 11, Bangna Trad Road KM. 3, Bagna, BANGKOK 10260,
Tel. +66 2 361 7910, Fax. +66 2 398 3447
Turkey: Yukari Dudullu, Org. San. Blg., 2.Cad. Nr. 28 81260 Umraniye,
ISTANBUL, Tel. +90 216 522 1500, Fax. +90 216 522 1813
Ukraine: PHILIPS UKRAINE, 4 Patrice Lumumba str., Building B, Floor 7,
252042 KIEV, Tel. +380 44 264 2776, Fax. +380 44 268 0461
United Kingdom: Philips Semiconductors Ltd., 276 Bath Road, Hayes,
MIDDLESEX UB3 5BX, Tel. +44 208 730 5000, Fax. +44 208 754 8421
United States: 811 East Arques Avenue, SUNNYVALE, CA 94088-3409,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
Uruguay: see South America
Vietnam: see Singapore
Yugoslavia: PHILIPS, Trg N. Pasica 5/v, 11000 BEOGRAD,
Tel. +381 11 3341 299, Fax.+381 11 3342 553
Printed in The Netherlands
613520/01/pp
16
Date of release:
2000 Sep 04
Document order number:
9397 750 07247