 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: P87C380 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

DATA SHEET
Product specification
File under Integrated Circuits, IC20
1997 Dec 12
INTEGRATED CIRCUITS
P83Cx80; P87C380
Microcontrollers for monitors
with DDC interface, auto-sync
detection and sync proc.

1997 Dec 12
2
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
CONTENTS
1
FEATURES
1.1
Differences from the 80C51 core
1.2
Memory
2
GENERAL DESCRIPTION
3
ORDERING INFORMATION
4
BLOCK DIAGRAM
5
PINNING INFORMATION
5.1
Pinning
5.2
Pin description
6
FUNCTIONAL DESCRIPTION
6.1
General
7
MEMORY ORGANIZATION
7.1
Program memory
7.2
Internal data memory
7.3
Additional Special Function Registers
8
INTERRUPTS
8.1
Priority level structure
8.2
How interrupts are handled
8.3
Interrupt Enable Register (IE)
8.4
Interrupt Priority Register (IP)
9
WATCHDOG TIMER
10
INPUT/OUTPUT (I/O)
10.1
The alternative functions for Port 0, Port 1,
Port 2 and Port 3
10.2
EMI (Electromagnetic Interference) reduction
11
REDUCED POWER MODES
11.1
Power Control Register
11.2
Idle mode
11.3
Power-down mode
11.4
Status of external pins
12
OSCILLATOR
13
RESET
13.1
External reset
13.2
Power-on-reset
13.3
T2 (Watchdog Timer) overflow
14
ANALOG CONTROL (DC)
14.1
8-bit PWM outputs (PWM0 to PWM9)
14.2
14-bit PWM output (PWM10)
14.3
A typical PWM output application
15
ANALOG-TO-DIGITAL CONVERTER (ADC)
15.1
Conversion algorithm
16
DIGITAL-TO-ANALOG CONVERTER (DAC)
16.1
8-bit Data Registers for the DAC outputs
(DACn; n = 0 to 3)
17
DISPLAY DATA CHANNEL (DDC)
INTERFACE
17.1
Special Function Registers related to the DDC
interface
17.2
Host type detection
17.3
DDC1 protocol
17.4
DDC2B protocol
17.5
DDC2AB/DDC2B+ protocol
17.6
RAM buffer for the system and DDC application
18
I
2
C-BUS INTERFACE
19
HARDWARE MODE DETECTION
19.1
Special Function Register for mode detection
and sync separation
19.2
System description
19.3
System operation
20
POWER MANAGEMENT
21
CONTROL MODES
22
ONE TIME PROGRAMMABLE (OTP)
VERSION
23
LIMITING VALUES
24
HANDLING
25
DC CHARACTERISTICS
26
DIGITAL-TO-ANALOG CONVERTER
CHARACTERISTICS
27
AC CHARACTERISTICS
28
PACKAGE OUTLINE
29
SOLDERING
29.1
Introduction
29.2
Soldering by dipping or by wave
29.3
Repairing soldered joints
30
DEFINITIONS
31
LIFE SUPPORT APPLICATIONS
32
PURCHASE OF PHILIPS I
2
C COMPONENTS

1997 Dec 12
3
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
1
FEATURES
∑
80C51 type core
∑
On-chip oscillator with a maximum frequency of 16 MHz
(maximum 0.75
µ
s instruction cycle)
∑
A DDC interface:
≠ That fully supports DDC1 with specific hardware
≠ That is DDC2B, DDC2B+, DDC2AB (ACCESS.bus)
compliant, based on a dedicated hardware I
2
C-bus
interface.
≠ Contains a specific AUX-RAM buffer with
programmable size (128 or 256 bytes) that can be
used for DDC operation and shared as system RAM
∑
Automatic mode detection by hardware to capture the
following information:
≠ HSYNC frequency with 12-bit resolution
≠ VSYNC frequency with 12-bit resolution
≠ HSYNC and VSYNC polarity
≠ HSYNC and VSYNC presence; needed for the VESA
Device Power Management Signalling (DPMS)
standard
∑
On-chip sync processor comprising:
≠ Composite sync separation
≠ Free running mode
≠ Clamping
≠ Pattern generation
∑
Two specific ports for the software I
2
C-bus interface
∑
4 analog voltage outputs derived from an 8-bit
Digital-to-Analog Converter (DAC)
∑
Ten 8-bit Pulse Width Modulation (PWM) outputs for
digital control application
∑
One 14-bit PWM output for digital control application
∑
One 4-bit Analog-to-Digital Converter (ADC) with 2 input
channels (for keyboard interface)
∑
LED driver port (Port 0); eight port lines with 10 mA drive
capability
∑
One 8-bit port only for I/O function
∑
20 derivative I/O ports with the specific port type
configuration in each alternative function
∑
Watchdog Timer with a programmable interval
∑
On-chip Power-on-reset for low power detection
∑
Special Idle and Power-down modes for reduced power
operation
∑
Optimized for Electromagnetic Compatibility (EMC)
∑
Operating temperature:
-
25 to +85
∞
C
∑
Single power supply: 4.4 to 5.5 V.
1.1
Differences from the 80C51 core
∑
No external memory connection; signals EA, ALE and
PSEN are not present.
∑
Port 1, Port 2 and Port 3 (P3.0 to P3.3 only) mixed with
other derivative functions.
∑
Timer 0/Counter 0 and Timer 1/Counter 1: external
input is removed.
∑
External interrupt 0/INT0 replaced by Mode detection
function.
∑
Standard serial interface (UART) and its control register
are removed.
∑
Wake-up from Power-down mode is also possible by
means of an interrupt.
1.2
Memory
Table 1
ROM/RAM sizes
DEVICE
MEMORY
ROM
RAM
P83C880
8 kbytes
512 bytes
P83C180
16 kbytes
512 bytes
P83C280
24 kbytes
512 bytes
P83C380
32 kbytes
512 bytes
P87C380 (OTP)
16 kbytes
512 bytes

1997 Dec 12
4
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
2
GENERAL DESCRIPTION
The P83Cx80; P87C380 denotes the following types:
P83C880, P83C180, P83C280, P83C380 and P87C380,
hereafter referred to as the P83C880, are monitor
microcontrollers of the 80C51 family, with DDC (DDC1,
DDC2B, DDC2B+ and DDC2AB) interface to the PC host.
The internal hardware can separate composite sync
signals and detect the various display modes. The
digital/analog voltage outputs can be used to control the
video and deflection functions the monitor.
This data sheet details the specific properties of the
P83C880, P83C180, P83C280, P83C380 and P87C380.
The shared characteristics of the 80C51 family of
microcontrollers are described in
"Data Handbook IC20",
which should be read in conjunction with this data sheet.
3
ORDERING INFORMATION
Note
1. For emulation the package CLCC84 is used.
TYPE NUMBER
PACKAGE
(1)
TEMPERATURE
RANGE (
∞
C)
NAME
DESCRIPTION
VERSION
P83C880
SDIP42 plastic shrink dual in-line package; 42 leads (600 mil)
SOT270-1
-
25 to +85
P83C180
P83C280
P83C380
P87C380 (OTP)

1997 Dec 12
5
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
4
BLOCK DIAGRAM
k, full pagewidth
MGG021
4
10
4
XTAL2
XTAL1
P3
P2
P1
P0
PARALLEL
I/O PORTS
&
EXTERNAL BUS
14-BIT
PWM
WATCHDOG
TIMER
(T2)
TWO 16-BIT
TIMERS
(T0, T1)
80C51
core
excluding
ROM/RAM
CPU
PROGRAM
MEMORY
10
◊
8-BIT
PWM
DDC
INTERFACE
MODE
DETECTION
INT0
DATA
MEMORY
4
◊
8-BIT
DAC
4-BIT
ADC
SOFTWARE
I
2
C-BUS
SERIAL
I/O
8-bit
internal bus
internal reset
(4)
512 BYTES
RAM
P83C880
P83C180
P83C280
P83C380
P87C380
VSYNC
in
CLAMP
(3)
HSYNC
in
PATOUT
(3)
SCL1
(1)
PWM0 to PWM7
(2)
;
PWM8 to PWM9
(3)
PWM10
(1)
RESET
SDA1
(1)
HSYNC
out
(1)
CSYNC
in
(1)
VSYNC
out
(1)
V
DD
V
SS
V
SSA
V
DDA
INT1
INT1
ADC0
(3)
DAC0 to DAC3
ADC1
(3)
SDA
(1)
SCL
(1)
Fig.1 Block diagram.
(1)
Alternative function of Port 1.
(2)
Alternative function of Port 2.
(3)
Alternative function of Port 3.
(4)
ROM
: 8
kbytes (P83C880); 16
kbytes (P83C180); 24
kbytes (P83C280); 32
kbytes (P83C380).
EPROM
: 16
kbytes only in the P87C180A.

1997 Dec 12
6
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
5
PINNING INFORMATION
5.1
Pinning
Fig.2 Pinning configuration for SDIP42.
handbook, halfpage
MGG020
1
2
42
41
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
PWM8/CLAMP/P3.0
PWM9/PATOUT/P3.1
PWM10/P1.7
SCL/P1.0
SDA/P1.1
SCL1/P1.2
SDA1/P1.3
INT1/VPP
ADC1/P3.3
ADC0/P3.2
VDDA
VSSA
DAC3
DAC2
DAC1
DAC0
RESET
P0.0
P0.1
P0.2
P0.3
PWM7/P2.7
PWM6/P2.6
PWM5/P2.5
PWM4/P2.4
PWM3/P2.3
PWM2/P2.2
PWM1/P2.1
PWM0/P2.0
XTAL1
XTAL2
VDD
VSS
HSYNCin/PROG
HSYNCout/P1.5
CSYNCin/P1.6
VSYNCin/OE
VSYNCout/P1.4
P0.7
P0.6
P0.5
P0.4
P83C880
P83C180
P83C280
P83C380
P87C380

1997 Dec 12
7
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
5.2
Pin description
Table 2
Pin description for SDIP42 (SOT270-1)
SYMBOL
PIN
DESCRIPTION
PWM9/PATOUT/P3.1
41
PWM9 to PWM0: 8-bit Pulse Width Modulation outputs 9 to 0. Pin 41 and 42 can
also be used as the output pin of the test pattern display PATOUT and clamping out
signal CLAMP respectively; PATOUT and CLAMP always have the higher priority.
Alternative function general I/O ports; Port 3: P3.1 to P3.0 and
Port 2: P2.7 to P2.0.
PWM8/CLAMP/P3.0
42
PWM7/P2.7
1
PWM6/P2.6
2
PWM5/P2.5
3
PWM4/P2.4
4
PWM3/P2.3
5
PWM2/P2.2
6
PWM1/P2.1
7
PWM0/P2.0
8
XTAL1
9
Oscillator input pin for system clock.
XTAL2
10
Oscillator output pin for system clock.
V
DD
11
Digital power supply (+5 V).
V
SS
12
Digital ground.
HSYNC
in
/PROG
13
Horizontal sync input pin. During OTP programming it is used as the program pulse
input (PROG).
HSYNC
out
/P1.5
14
Horizontal sync output pin; alternative function: general I/O port P1.5.
CSYNC
in
/P1.6
15
Composite sync input pin; alternative function: general I/O port P1.6.
VSYNC
in
/OE
16
Vertical sync input pin. During OTP programming it is used as output strobe (OE).
VSYNC
out
/P1.4
17
Vertical sync output pin; alternative function: general I/O port P1.4.
P0.7 to P0.0
18 to 25 Port 0: general I/O ports; capability to drive LED.
RESET
26
Reset input; active HIGH initializes the device.
DAC0 to DAC3
27 to 30 8-bit DAC analog voltage output pins; output range: 0 to 5 V.
V
SSA
31
Analog ground for DAC and ADC.
V
DDA
32
Analog power supply (+5 V) for DAC and ADC.
ADC0/P3.2
33
ADC analog input pins; alternative function: general I/O ports P3.2 and P3.3.
ADC1/P3.3
34
INT1/V
PP
35
External interrupt input pin. During OTP programming it is used as programming
supply voltage pin; V
PP
= 12.75 V.
SDA1/P1.3
36
I
2
C-bus serial data I/O port for the DDC2 interface; alternative function: general I/O
port P1.3.
SCL1/P1.2
37
I
2
C-bus serial clock I/O port for the DDC2 interface; alternative function: general I/O
port P1.2.
SDA/P1.1
38
I
2
C-bus serial data I/O port; alternative function: general I/O port P1.1.
SCL/P1.0
39
I
2
C-bus serial clock I/O port; alternative function: general I/O port P1.0.
PWM10/P1.7
40
14-bit Pulse Width Modulation output 10; alternative function: general I/O port P1.7.

1997 Dec 12
8
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
6
FUNCTIONAL DESCRIPTION
This chapter gives a brief overview of the device.
Detailed functional descriptions are given in the following
chapters:
Chapter 7 "Memory organization"
Chapter 8 "Interrupts"
Chapter 9 "Watchdog Timer"
Chapter 10 "Input/Output (I/O)"
Chapter 11 "Reduced power modes"
Chapter 12 "Oscillator"
Chapter 13 "Reset"
Chapter 14 "Analog control (DC)"
Chapter 15 "Analog-to-digital converter (ADC)"
Chapter 16 "Digital-to-analog converter (DAC)"
Chapter 17 "Display Data Channel (DDC) interface"
Chapter 18 "I2C-bus Interface"
Chapter 19 "Hardware mode detection"
Chapter 20 "Power management"
Chapter 21 "Control modes".
6.1
General
The P83C880, P83C180, P83C280, P83C380 and
P87C380 8-bit microcontrollers are manufactured in an
advanced CMOS process and are derivatives of the
80C51 microcontroller family. They have the same
instruction set as the 80C51.
They contain 512 bytes of data memory (RAM). ROM:
8 kbytes (P83C880); 16 kbytes (P83C180); 24 kbytes
(P83C280); 32 kbytes (P83C380) and 16 kbytes of
EPROM for the P87C180. The microcontrollers are
intended for use in monitors ranging from 14" to 21" that
can be controlled from the outside (e.g. by a PC) via the
external DDC interface.
In addition to the 80C51 standard functions, they provide a
number of dedicated hardware functions for monitor
application. Eight general I/O ports plus 20 functions
combined I/O ports cater for application requirements
adequately.
Ten sets of 8-bit PWM deliver the digital waveform for
analog control purposes. One 14-bit PWM can support
F to V application. The keyboard interface is achieved via
a 4-bit ADC. A Watchdog Timer with a maximum count
period of 5 s prevents the processor running out of control
due to malfunction. Four channels of linear DAC with 8-bit
resolution support more accurate analog controls.
One software I
2
C-bus interface is dedicated for the internal
connection. A DDC interface will cover all DDC protocols,
including DDC1, DDC2B, DDC2AB and DDC2B+.
A hardware mode detector will facilitate mode detection
even in power reduced modes, e.g. Idle mode.
The versatile HSYNC and VSYNC outputs can be
generated to serve the desired application. In the free
running mode, two display patterns can highlight the status
of the monitor. Accordingly, the following items will be
supported by these microcontrollers:
∑
Mode detection for:
≠ Horizontal sync (HSYNC) frequencies from below
15 kHz up to 150 kHz
≠ Vertical sync (VSYNC) frequencies from below 40 Hz
up to 200 Hz
∑
ACCESS.bus interfacing with external devices, e.g. PCs
∑
DDC1, DDC2B, DDC2AB and DDC2B+ protocols as
defined in the VESA DDC standard
∑
Device Power Management Signalling (DPMS) as
described in VESA DPMS proposal.
Figure 1 shows the block diagram functions.

1997 Dec 12
9
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
7
MEMORY ORGANIZATION
The Central Processing Unit (CPU) manipulates operands in two memory spaces. There are 512 bytes of internal data
memory, consisting of 256 bytes standard RAM and 256 bytes RAM buffer which is accessible as the Auxiliary RAM
(AUX-RAM) or addressed through DDCADR and RAMBUF. The memory map and address spaces are shown in Fig.3.
7.1
Program memory
The program memory consists of ROM: 8 kbytes (P83C880), 16 kbytes (P83C180), 24 kbytes (P83C280) and 32 kbytes
(P83C380). The program memory implemented in the P87C380 is a 16 kbytes EPROM (OTP).
7.2
Internal data memory
The internal data memory is divided into three physically separated parts: 256 bytes of RAM, 256 bytes of AUX-RAM,
and a 128 bytes Special Function Registers (SFRs) area. These can be addressed each in a different way as described
in Sections 7.2.1 to 7.2.3 and Table 3.
Table 3
Internal data memory map
Notes
1. RAM locations 0 to 127 can be addressed directly and indirectly as in the 80C51.
2. RAM locations 128 to 255 can only be addressed indirectly.
MEMORY
LOCATION
ADDRESS MODE
POINTERS
DIRECT
INDIRECT
RAM
0 to 127
(1)
X
X
address pointers are R0 and R1 of the selected register bank
128 to 255
(2)
-
X
AUX-RAM 0 to 255
-
X
(3)
address pointer DDCADR and RAMBUF
SFRs
128 to 255
X
-
-
andbook, full pagewidth
MGG028
overlapped space
255
127
0
INTERNAL
program memory area
internal data memory area
32767
(1)
24575
(2)
16383
(3)
8191
(4)
0
INDIRECT
ONLY
INDIRECT
ONLY
DIRECT AND
INDIRECT
SPECIAL
FUNCTION
REGISTERS
AUX-RAM
BUFFER
255
0
Fig.3 Memory map and address spaces.
(1) P83C380 and P87C380.
(2) P83C280.
(3) P380C180.
(4) P83C880.

1997 Dec 12
10
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
3. Indirect-addressable via MOVX-Datapointer or
MOVX-Ri instructions.
7.2.1
RAM
Four register banks, each 8 registers wide, occupy
locations 0 through 31 in the lower RAM area. Only one of
these banks may be enabled at a time. The next 16 bytes,
locations 32 through 47, contain 128 directly addressable
bit locations. The stack can be located anywhere in the
internal 256 bytes RAM. The stack depth is only limited by
the available internal RAM space of 256 bytes (see Fig.4).
7.2.2
S
PECIAL
F
UNCTION
R
EGISTERS
(SFR
S
)
The SFRs can only be addressed directly in the address
range from 128 to 255 (see Fig.3). Figure 5 gives an
overview of the Special Function Registers space. Sixteen
address in the SFRs space are both byte and
bit-addressable. The bit-addressable SFRs are those
whose address ends in 0H and FH. The bit addresses in
this area are 80H to FFH
7.2.3
AUX-RAM
AUX-RAM buffer 0 to 255 is indirectly addressable as
external data memory locations 0 to 255 via
MOVX-Datapointer instruction or via MOVX-Ri instruction.
Since the external access function is not available, any
access to AUX-RAM 0 to 255 will not affect the ports.
The 256 bytes of AUX-RAM buffer used to support DDC
interface is also available for system usage by indirect
addressing through the address pointer DDCADR and
data I/O buffer RAMBUF. The address pointer (DDCADR)
is equipped with the post increment capability to facilitate
the transfer of data in bulk (for details refer to Chapter 17).
However, it is also possible to address the AUX-RAM
buffer through MOVX command as usually used in the
internal RAM extension of 80C51 derivatives.
Fig.4 RAM bit addresses.
MBH079
7F
7E
7D
7C
7B
7A
79
78
77
76
75
74
73
72
71
70
6F
6E
6D
6C
6B
6A
69
68
67
66
65
64
63
62
61
60
5F
5E
5D
5C
5B
5A
59
58
57
56
55
54
53
52
51
50
4F
4E
4D
4C
4B
4A
49
48
47
46
45
44
43
42
41
40
3F
3E
3D
3C
3B
3A
39
38
37
36
35
34
33
32
31
30
2F
2E
2D
2C
2B
2A
29
28
27
26
25
24
23
22
21
20
1F
1E
1D
1C
1B
1A
19
18
17
16
15
14
13
12
11
10
0F
0E
0D
0C
0B
0A
09
08
07
06
05
04
03
02
01
00
18H
17H
10H
0FH
08H
07H
00H
24
23
31
16
15
8
7
0
BANK 0
BANK 1
BANK 2
BANK 3
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
(MSB)
(LSB)
255
FFH
2FH
2EH
2DH
2CH
2BH
2AH
29H
28H
27H
26H
25H
24H
23H
22H
21H
20H
1FH
BYTE
ADDRESS
(DECIMAL)
BYTE
ADDRESS
(HEX)
BIT ADDRESS
(HEX)

1997 Dec 12
11
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
handbook, full pagewidth
MGG029
FF
(MSB)
(LSB)
255
MDCST
FFH
F8H
BYTE ADDRESS
(DECIMAL)
BYTE ADDRESS
(HEX)
BIT ADDRESS
(HEX)
FE
FD
FC
FB
FA
F9
F8
F7
B
F0H
F6
F5
F4
F3
F2
F1
F0
EF
PWME2
E8H
EE
ED
EC
EB
EA
E9
E8
C7
DFCON
C0H
C6
C5
C4
C3
C2
C1
C0
BF
IP0
B8H
BE
BD
BC
BB
BA
B9
B8
B7
P3
B0H
B6
B5
B4
B3
B2
B1
B0
AF
IEN0
A8H
AE
AD
AC
AB
AA
A9
A8
A7
P2
A0H
A6
A5
A4
A3
A2
A1
A0
9F
not used
98H
9E
9D
9C
9B
9A
99
98
97
P1
90H
96
95
94
93
92
91
90
8F
TCON
88H
8E
8D
8C
8B
8A
89
88
87
P0
80H
86
85
84
83
82
81
80
E7
ACC
E0H
E6
E5
E4
E3
E2
E1
E0
DF
S1CON
D8H
PSW
D0H
PWME1
C8H
DE
DD
DC
DB
DA
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
CF
CE
CD
CC
CB
CA
C9
C8
Fig.5 Special Function Registers bit addresses.
1997 Dec 12
12
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
7.3
Additional Special Function Registers
The standard SFRs as used in 80C51 and the SFRs for some typical derivative functions like I
2
C-bus interface, Timer,
etc. are described in the
"Data Handbook IC20". The specific SFRs for the P83C880 are introduced in the relevant
chapters. Some SFRs which are not mentioned or not dedicated to a certain function will be described in the following
sections.
All new additional SFRs used in the P83C880 are listed in Table 4. However, only some of them will be explained in detail
in Sections 7.3.1 to 7.3.7.
Table 4
Overview of additional SFRs
Notes
1. X = don't care; even if it's implemented.
2. B = both read/write and R
o
= read only; accessible for the entire byte or an individual bit. U = not implemented.
REGISTER
DESCRIPTION
ADDRESS
RESET VALUE
(1)
READ/WRITE
(2)
RAMBUF
RAM Buffer I/O Interface Register
9CH
XXXXXXXX
B
DDCCON
DDC Control Register
9DH
X
00
X
0000
UBBUBBBB
DDCADR
DDC Address Pointer
9EH
00000000
B
DDCDAT
Data Shift Register for DDC1
9FH
00000000
B
DFCON
Miscellaneous Control Register
C0H
10000000
B
ADCDAT
ADC Control Register
C1H
XX
000000
UUBBBBBR
O
PWM10H
PWM High-byte Data Latch
C6H
00000000
B
PWM10L
PWM Low-byte Data Latch
C7H
10000000
B
S1CON
Control Register for DDC2
D8H
00000000
B
S1STA
Status Register for DDC2
D9H
11111000
R
o
S1DAT
Data Shift Register for DDC2
DAH
00000000
B
S1ADR
Address Register for DDC2
DBH
00000000
B
PWME1
PWM Output Control Register 1
C8H
00000000
B
PWME2
PWM Output Control Register 2
E8H
00000000
B
PWM0 to PWM9
Data Latches for 8-bit PWMs
C9H to CFH,
EDH to EFH
00000000
B
DAC0 to DAC3
8-bit Data Latches for 8-bit DACs
E9H to ECH
00000000
B
HFP
Free run Control Register for HSYNC
out
F6H
01100000
B
HFPOPW
Free run and Pulse width for HSYNC
out
F7H
00011111
B
MDCST
Mode Detect Control and Status Register
F8H
1
X
000000
BUBBRRRR
VFP
Free run Control Register for VSYNC
out
F9H
01000000
B
VFPOPW
Free run and Pulse width for VSYNC
out
FAH
XX
000101
B
PULCNT
Pulse Generation Control Register
FBH
00000000
B
HFHIGH
Horizontal Period Counting High-byte
Register
FCH
00000000
R
o
VFHIGH
Vertical Period Counting High-byte Register
FDH
00000000
R
o
VFLHFL
Vertical and Horizontal Period Counting
Low-nibbles Register
FEH
00000000
R
o
T2
Watchdog Timer Data Register
FFH
00000000
B
1997 Dec 12
13
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
7.3.1
RAM B
UFFER
I/O I
NTERFACE
R
EGISTER
(RAMBUF)
RAMBUF is used as an I/O interface to the RAM buffer. If it is associated with the address pointer DDCADR which is
equipped with the capability of post increment, then it will be convenient to transfer the consecutive data stream. This
feature is useful to support the DDC/EDID data transfer.
Table 5
RAM Buffer I/O Interface Register (SFR address 9CH)
Table 6
Description of RAMBUF bits
7.3.2
M
ISCELLANEOUS
C
ONTROL
R
EGISTER
(DFCON)
This register is bit-addressable.
Table 7
Miscellaneous Control Register (SFR address C0H)
Table 8
Description of DFCON bits
7
6
5
4
3
2
1
0
RAMBUF.7
RAMBUF.6
RAMBUF.5
RAMBUF.4
RAMBUF.3
RAMBUF.2
RAMBUF.1
RAMBUF.0
BIT
SYMBOL
DESCRIPTION
7 to 0
RAMBUF.7 to RAMBUF.0
8-bit data which is read from or to be written into RAM buffer
7
6
5
4
3
2
1
0
EW2
SOGE
SYNCE
DDCE
S1E
ADCE
P14LVL
P8LVL
BIT
SYMBOL
DESCRIPTION
7
EW2
Watchdog Timer enable flag. This flag is associated with the flags, EW1 (SFR
PWM10H) and EW0 in (SFR PWM10L) to form the enable/disable control key for the
Watchdog Timer (see Chapter 9). The Watchdog Timer is only disabled by
EW2 to EW0 = 101, else it is kept enabled for the rest of the combinations.
6
SOGE
CSYNC
in
enable for pin CSYNC
in
/P1.6. If SOGE = 1, the pin function is CSYNC
in
. If
SOGE = 0, the pin function is I/O port P1.6.
5
SYNCE
Sync separated signals output enable for pins VSYNC
out
/P1.4 and HSYNC
out
/P1.5.
If SYNCE = 1, the pins function as VSYNC
out
and HSYNC
out
respectively.
If SYNCE = 0, the pins function as I/O ports P1.4 and P1.5 respectively.
4
DDCE
Enable for DDC interface pins SCL1/P1.2 and SDA1/P1.3. If DDCE = 1, the pins
function as SCL1 and SDA1 respectively for the DDC interface. If DDCE = 0, the pins
function as I/O ports P1.2 and P1.3 respectively.
3
S1E
Enable for I
2
C-bus interface pins SCL/P1.0 and SDA/P1.1. If S1E = 1, the pins
function as SCL and SDA respectively for the I
2
C-bus interface. If S1E = 0, the pins
function as I/O ports P1.0 and P1.1 respectively.
1997 Dec 12
14
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
7.3.3
ADC C
ONTROL
R
EGISTER
(ADCDAT)
Table 9
ADC Control Register (SFR address C1H)
Table 10 Description of ADCDAT bits
7.3.4
14-
BIT
PWM
DATA LATCHES
(PWM10H
AND
PWM10L)
Table 11 PWM High-byte Data Latch (PWM10H; SFR address C6H)
Table 12 Description of PWM10H bits
2
ADCE
ADC channel enable. This flag enables the ADC function and also switches the pins
ADC0/P3.2 and ADC1/P3.3 to the ADC inputs function. If ADCE = 1, the ADC function
is enabled and the pin functions are ADC0 and ADC1 respectively. If ADCE = 0, the
ADC function is disabled and the pin functions are I/O ports P3.2 and P3.3 respectively.
1
P14LVL
Polarity selection bit for the PWM10 output (14-bit PWM). If P14LVL = 1, PWM10
output is inverted. If P14LVL = 0, PWM10 output is not inverted.
0
P8LVL
Polarity selection bit for the PWM0 to PMM9 outputs (8-bit PWM). If P8LVL = 1,
PWM0 to PWM9 outputs are inverted. If P8LVL = 0, PWM0 to PWM9 outputs are not
inverted.
7
6
5
4
3
2
1
0
-
-
DACHL
DAC3
DAC2
DAC1
DAC0
COMP
BIT
SYMBOL
DESCRIPTION
7 to 6
-
Reserved.
5
DACHL
ADC input channels selection. If DACHL = 1, then input channel
ADC1 is selected. If DACHL = 0, then input channel ADC0 is selected.
4 to 1
DAC3 to DAC0
Reference voltage level selection. The 4 bits select the analog output
voltage (V
ref
) of the 8-bit DAC. For V
ref
values see Table 31.
0
COMP
Comparison result; read only. If COMP = 1, then the ADC input
voltage is higher than the reference voltage. If COMP = 0, then the ADC
input voltage is lower than the reference voltage.
7
6
5
4
3
2
1
0
EW1
PWM10H.6
PWM10H.5
PWM10H.4
PWM10H.3
PWM10H.2
PWM10H.1
PWM10H.0
BIT
SYMBOL
DESCRIPTION
7
EW1
Watchdog Timer enable flag. This flag is associated with the flag EW2
(SFR DFCON) and EW0 (SFR PWM10L) to form the enable/disable
control key for the Watchdog Timer; see Tables 8 and 14.
6 to 0
PWM10H.6 to PWM10H.0
7 upper data bits for the 14-bit PWM.
BIT
SYMBOL
DESCRIPTION

1997 Dec 12
15
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Table 13 PWM Low-byte Data Latch (PWM10L; SFR address C7H)
Table 14 Description of PWM10L bits
7.3.5
PWM O
UTPUT
C
ONTROL
R
EGISTER
1 (PWME1)
Table 15 PWM Output Control Register 1 (SFR address C8H)
Table 16 Description of PWME1 bits
7
6
5
4
3
2
1
0
EW0
PWM10L.6
PWM10L.5
PWM10L.4
PWM10L.3
PWM10L.2
PWM10L.1
PWM10L.0
BIT
SYMBOL
DESCRIPTION
7
EW0
Watchdog Timer enable flag. This flag is associated with the flag EW2
(SFR DFCON) and EW1 (SFR PWM10H) to form the enable/disable
control key for the Watchdog Timer; see Table 8 and 12.
6 to 0
PWM10L.6 to PWM10L.0
7 lower data bits for the 14-bit PWM.
7
6
5
4
3
2
1
0
PWME1.7
PWME1.6
PWME1.5
PWME1.4
PWME1.3
PWME1.2
PWME1.1
PWME1.0
BIT
SYMBOL
DESCRIPTION
7 to 0
PWME1.7
to
PWME1.0
PWM outputs enable; n = 7 to 0. If PWME1.n = 1, the corresponding PWM is enabled
and pins PWMn/P2.n are switched to PWMn outputs. If PWME1.n = 0, the
corresponding PWM is disabled and pins PWMn/P2.n are switched to I/O ports P2.n
function.
1997 Dec 12
16
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
7.3.6
PWM O
UTPUT
C
ONTROL
R
EGISTER
2 (PWME2)
Table 17 PWM Output Control Register 2 (SFR address E8H)
Table 18 Description of PWME2 bits
7.3.7
D
ATA
L
ATCHES FOR
8-
BIT
PWM
S
(PWM0
TO
PWM9)
Table 19 Data Latches for 8-bit PWMs (n = 0 to 9; SFR address C9H to CFH and EDH to EFH)
Table 20 Description of PWM0 to PWM9 bits
7
6
5
4
3
2
1
0
PATENA
DACE3
DACE2
DACE1
DACE0
PWME2.2
PWME2.1
PWME2.0
BIT
SYMBOL
DESCRIPTION
7
PATENA
PATOUT (pattern output) enable. If PATENA = 1, the pin
PWM9/PATOUT/P3.1 is switched to the PATOUT (display test pattern)
output. If PATENA = 0, the PATOUT function is disabled. The PATOUT
function always overrides other alternative functions such as PWM9 and
P3.1.
6 to 3
DACE3 to DACE0
DAC outputs enable (n = 3 to 0). If DACEn = 1, the corresponding
DACs: DAC3 to DAC0 are enabled. If DACEn = 0, the corresponding
DACs: DAC3 to DAC0 are disabled.
2 to 0
PWME2.2 to PWME2.0
PWM outputs enable; n = 2 to 0. If PWME2.n = 1, the corresponding
PWMs: PWM8, PWM9 and PWM10, are enabled by PWME2.2,
PWME2.1 and PWME2.0 respectively and pins PWM8/CLAMP/P3.0,
PWM9/PATOUT/P3.1 and PWM10/P1.7 are switched to PWM output. If
PWME2.n = 0, the corresponding PWM is disabled. Pins
PWM8/CLAMP/P3.0, PWM9/PATOUT/P3.1 and PWM10/P1.7 are
switched to I/O port functions P3.0, P3.1 and P1.7 respectively.
7
6
5
4
3
2
1
0
PWMn.7
PWMn.6
PWMn.5
PWMn.4
PWMn.3
PWMn.2
PWMn.1
PWMn.0
BIT
SYMBOL
DESCRIPTION
7 to 0
PWMn.7 to PWMn.0
8-bit data for PWM channel n (n = 0 to 9)
1997 Dec 12
17
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
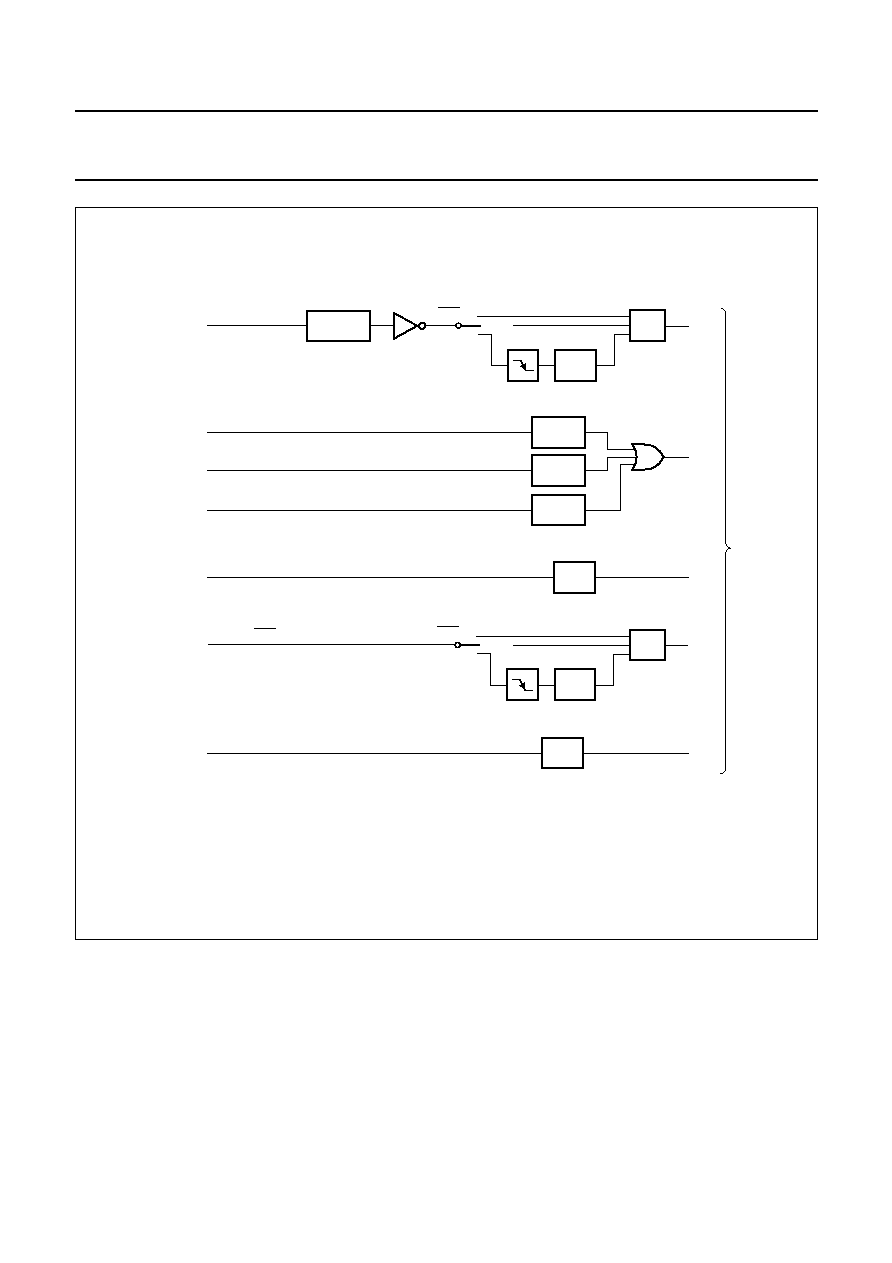
8
INTERRUPTS
The P83C880 has 5 interrupt sources; these are shown in
Fig.6.
Interrupt INT1 is generated as in a normal 80C51 device.
By means of IT1 in SFR TCON this interrupt can be
selected to be:
∑
Level sensitive, when IT1 = LOW; INT1 must be inactive
before a return from interrupt instruction (RETI) is given,
otherwise the same interrupt will occur again.
∑
Edge sensitive, when IT1 = HIGH; the internal hardware
will reset the latch when the LCALL instruction is
executed for the vector address (see Table 21).
Interrupt INT0 is generated by the mode change of mode
detector. Interrupt INT0 is selected as edge or level
sensitive by the state of the IT0 bit in the SFR TCON.
However, it is recommended to always set IT0 to HIGH
(edge sensitive) so that IE0 will be reset by the internal
hardware when the LCALL instruction is executed for the
vector address.
Timer 0 and Timer 1 interrupts are generated by TF0 and
TF1 which are set by an overflow of their respective
Timer/Counter registers (except for Timer 0 in Mode 3;
see
"Data Handbook IC20; 80C51 Family; Chapter
Timer/Counters"). When a timer interrupt is generated, the
interrupt flag is cleared by the internal hardware when the
LCALL instruction is executed for the vector address.
The DDC interrupt is generated either by bit SI (SFR
S1CON) for DDC2B/DDC2AB/DDC2B+ protocols or by bit
DDC_int (SFR DDCCON) or by bit SWHINT (SFR
DDCCON). These flags must be cleared by software.
All bits that generate interrupts can be set or cleared by
software, with the same result as though it had been set or
cleared by hardware. That is, interrupts can be generated
or pending interrupts can be cancelled in software.
Each of these interrupts sources can be individually
enabled or disabled by setting or clearing the bit in Special
Function Register IE (see Table 23). IE also contains a
global disable bit EA, which disables all interrupts at once.
8.1
Priority level structure
The priority level of each interrupt source can be
individually programmed by setting or clearing a bit in
Special Function Register IP (see Table 25). A low priority
interrupt can itself be interrupted by a high priority
interrupt, but not by another low priority interrupt. A high
priority interrupt can not be interrupted by another interrupt
source.
If two requests of different priority levels are received
simultaneously, the request of higher priority level is
serviced. If request of the same priority level is received
simultaneously, an internal polling sequence determines
which request is serviced. Thus within each priority level
there is a second priority structure determined as shown in
Table 21. The IP register contains a number of reserved
(in 80C51) bits: IP.7, IP.6 and IP.4. User software should
not write logic 1s to these positions, since they may be
used in other 80C51 family products.
Table 21 Priority within levels
Note
1. The `Priority within level' structure is only used to
resolve simultaneous requests of the same priority
level.
SOURCE
PRIORITY WITHIN LEVEL
(1)
IE0
1 (highest)
SI
2
TF0
3
IE1
4
TF1
5 (lowest)
1997 Dec 12
18
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.6 Interrupt sources.
handbook, full pagewidth
MGG024
TF0
TF0
'0'
'1'
interrupt
sources
Timer 0 overflow
Timer 1 overflow
TF1
CHREQ
TF1
S12
DDC INT
SWH INT
SI
IE1
IE1¥
IT1
INT1
MUX
'0'
'1'
IE0
IE0¥
IT0
INT0
MUX
external interrupt INT1
DDC2 (DDC2B/DDC2AB/DDC2B
+
) interrupt
DDC1 interrupt
SWITCH interrupt
mode change interrupt

1997 Dec 12
19
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
8.2
How interrupts are handled
The interrupt flags are sampled at the S5P2 state of every
machine cycle. The samples are polled during the
following machine cycle. If one of the flags was in a set
condition at S5P2 of the preceding cycle, the polling cycle
will find it and the interrupt system will generate an LCALL
to the appropriate service routine, provided this hardware
generated LCALL is not blocked by any of the following
conditions:
1. An interrupt of equal priority or higher priority level is
already in progress.
2. The current (polling) cycle is not the final cycle in the
execution of the instruction in progress.
3. The instruction in progress is RETI or any write to the
IE or IP registers.
Any of these conditions will block the generation of the
LCALL to the interrupt service routine. Condition 2
ensures that the instruction in progress will be completed
before vectoring to any service routine.
Condition 3 ensures that if the instruction in progress is
RETI or any access to IE or IP, then at least one more
instruction will be executed before the interrupt is vectored
to.The polling cycle is repeated with each machine cycle,
and the values polled are the values that were present at
S5P2 of the previous machine cycle. Note that if an
interrupt flag is active but not being responded to for one
of the above mentioned conditions, and if the flag is still
inactive when the blocking condition is removed, then the
denied interrupt will not be serviced. In other words, the
fact that the interrupt flag was once active but not serviced
is not remembered. Every polling cycle is new.
The polling cycle/LCALL sequence is illustrated in
"Data
Handbook IC20; 80C51 family hardware description;
Figure: Interrupt Response Timing Diagram".
Note that if an interrupt of higher priority level becomes
active prior to S5P2 of the machine cycle labelled C3 (see
"Data Handbook IC20; 80C51 family hardware description;
Figure: Interrupt Response Timing Diagram"), then in
accordance with the above rules it will be vectored to
during C5 and C6, without any instruction of the lower
priority routine having been executed. Thus the processor
acknowledges an interrupt request by executing a
hardware generated LCALL to the appropriate servicing
routine. The hardware generated LCALL pushes the
contents of the Program Counter on to the stack (but it
does not save the PSW) and reloads the PC with an
address that depends on the source of the interrupt being
vectored to as shown in Table 22.
Execution proceeds from that location until the RETI
instruction is encountered. The RETI instruction informs
the processor that the interrupt routine is no longer in
progress, then pops the top two bytes from the stack and
reloads the Program Counter. Execution of the interrupted
program continues from where it left off.
Note that a simple RET instruction would also return
execution to the interrupted program, but it would have left
the interrupt control system thinking an interrupt was still in
progress, making future interrupts impossible.
Table 22 Vector addresses
SOURCE
VECTOR ADDRESS
IE0
0003H
SI
002BH
TF0
000BH
IE1
0013H
TF1
001BH

1997 Dec 12
20
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
8.3
Interrupt Enable Register (IE)
Table 23 Interrupt Enable Register (SFR address A8H)
Table 24 Description of IE bits
8.4
Interrupt Priority Register (IP)
Table 25 Interrupt Priority Register (address B8H)
Table 26 Description of IP bits
7
6
5
4
3
2
1
0
EA
-
ES1
-
ET1
EX1
ET0
EX0
BIT
SYMBOL
FUNCTION
7
EA
Disable all interrupts. If EA = 0, then no interrupt will be acknowledged. If EA = 1, then
each interrupt source is individually enabled or disabled by setting or clearing its enable
bit.
6
-
Reserved.
5
ES1
Enable DDC interface interrupt. If ES1 = 1, then DDC interface interrupt is enabled.
If ES1 = 0, then DDC interface interrupt is disabled.
4
-
Reserved.
3
ET1
Enable Timer 1 overflow interrupt. If ET1 = 1, then the Timer 1 interrupt is enabled.
If ET1 = 0, then the Timer 1 interrupt is disabled.
2
EX1
Enable external interrupt 1. If EX1 = 1 then the External 1 interrupt is enabled.
If EX1 = 0 then the External 1 interrupt is disabled.
1
ET0
Enable Timer 0 overflow interrupt. If ET0 = 1 then the Timer 0 interrupt is enabled.
If ET0 = 0 then the Timer 0 interrupt is disabled.
0
EX0
Enable mode change. If EX0 = 1 then the mode change interrupt is enabled.
If EX0 = 0 then the mode change interrupt is disabled.
7
6
5
4
3
2
1
0
-
-
PS1
-
PT1
PX1
PT0
PX0
BIT
SYMBOL
DESCRIPTION
7 to 6
-
Reserved.
5
PS1
DDC interface Interrupt priority level. When PS1 = 1, DDC interface Interrupt is
assigned a high priority level.
4
-
Reserved.
3
PT1
Timer 1 overflow interrupt priority level. When PT1 = 1, Timer 1 Overflow Interrupt is
assigned a high priority level.
2
PX1
External interrupt 1 priority level. When PX1 = 1, External Interrupt 1 priority is
assigned a high priority level.
1
PT0
Timer 0 overflow interrupt priority level. When PT0 = 1, Timer 0 Overflow Interrupt is
assigned a high priority level.
0
PX0
Mode change interrupt priority level. When PX0 = 1, Mode change Interrupt is
assigned a high priority level.

1997 Dec 12
21
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
9
WATCHDOG TIMER
In addition to the standard timers, a Watchdog Timer
consisting of an 10-bit prescaler and an 8-bit timer is also
incorporated. The timer is increased every 19.5 ms for an
oscillator frequency of 16 MHz; this is derived from the
oscillator frequency (f
clk
) by the formula:
When a timer overflow occurs, the microcontroller is reset.
To prevent a system reset, the timer must be reloaded
before an overflows occurs, by the application software.
If the processor suffers a hardware/software malfunction,
the software will fail to reload the timer. This failure will
produce a reset upon overflow thus preventing the
processor running out of control.
The Watchdog Timer can only be reloaded if the condition
flag WLE (PCON.4) has been previously set by software.
At the moment the counter is loaded the condition flag is
automatically cleared.
In the Idle mode the Watchdog Timer and reset circuitry
remain active.
The time interval between timer reloading and the
occurrence of a reset, depends on the reloaded value.
f
timer
f
clk
304
1024
◊
-----------------------------
=
The Watchdog Timer's time interval is:
Where T2 = decimal value of the T2 register contents and
t
1
= 15.2
µ
s (f
clk
= 10 MHz); t
1
= 12.7
µ
s (f
clk
= 12 MHz)
and t
1
= 19
µ
s (f
clk
= 16 MHz).
For example, this may range from 19.5 ms to 5.0 s when
using an oscillator frequency of 16 MHz.
Table 27 lists the resolution and the maximum time interval
of the Watchdog Timer using different system clocks.
The Watchdog Timer is controlled by the Watchdog control
bits:
∑
EW2; DFCON.7 (SFR address C0H)
∑
EW1; PWM10H.7 (SFR address C6H)
∑
EW0; PWM10L.7 (SFR address C6H).
Only when EW2 to EW0 = 101 the Watchdog Timer is
disabled and allows the Power-down mode to be enabled.
The rest of pattern combinations will keep the Watchdog
Timer enabled and disable the Power-down mode.
This security key with multiple flags split in two SFRs will
prevent the Watchdog Timer from being terminated
abnormally when the function of the Watchdog Timer is
needed.
t
t
1
1024
256
T2
≠
(
)
-----------------------------
◊
=
Table 27 Resolution and the maximum time interval of the WDT
f
clk
(MHz)
PRESCALER FACTOR
RESOLUTION
(ms)
MAXIMUM TIME INTERVAL
(s)
10
152
15.56
4.0
12
12.97
3.3
16
304
19.46
5.0

1997 Dec 12
22
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
10 INPUT/OUTPUT (I/O)
The P83C880 has three 8-bit ports. Ports 0 to 2 are the
same as in the 80C51, with the exception of the additional
functions of Port 1 and Port 2. Port 3 only contains 4 bits.
Port 3 also has alternative functions.
All ports are bidirectional. Pins of which the alternative
function is not used may be used as normal bidirectional
I/Os.
The use of Port 1, Port 2 and Port 3 pins as an alternative
function is carried out automatically by the P83C880
provided the associated Special Function Register bit is
set HIGH.
The quasi-bidirectional type of port is applied for Port 1,
Port 2 and Port 3. Port 0 is an open-drain I/O port with the
capability to drive LED. However, for any port with an
alternative function, while the alternative function is
performed, the port type will be switched to the appropriate
type against a specific function. The port types:
quasi-bidirectional, pull-up and open-drain are shown in
Figs 7, 8 and 9 respectively.
10.1
The alternative functions for Port 0, Port 1,
Port 2 and Port 3
Port 0 Provides the low-order address in
programming/verify mode for the P87C380.
Port 1 Used for a number of special functions:
∑
2 I/O pins for I
2
C-bus interface: SCL/P1.0 and
SDA/P1.1. The port type in this situation is set as
open-drain.
∑
2 I/O pins for DDC interface: SCL1/P1.2 and
SDA1/P1.3. The port type in this situation is set
as open-drain.
∑
2 I/O pins for the outputs of sync separation:
VSYNC
out
/P1.4 and HSYNC
out
/P1.5. The port
type in this situation is set as push-pull.
∑
One pin for the composite sync input of sync on
green mode: CSYNC
in
/P1.6. There is no pull-up
protection diode for this input pin.
∑
One pin for the 14-bit PWM output:
PWM10/P1.7. As PWM function, the port type is
open-drain.
Port 2 Two alternative functions are provided:
∑
High-order address in Programming/Verify mode
for P87C380.
∑
8 channels of PWM outputs:
PWM0/P2.0 to P2.7/PWM7. The port type in this
situation is set as open-drain.
Port 3 Two alternative functions are provided:
∑
Two channels of PWM output:
PWM8/CLAMP/P3.0 and PWM9/PATOUT/P3.1.
The port type in this situation is set as
open-drain. PATOUT and CLAMP functions
always override PWM or port function even if
they are enabled. For the PATOUT (pattern
output) and CLAMP (clamping output)
application, the port type is defined as push-pull.
∑
Two pins for the software ADC input: ADC0/P3.2
and ADC1/P3.3. They are analog inputs.
10.2
EMI (Electromagnetic Interference) reduction
In order to reduce EMI (Electromagnetic Interference) the
following design measures have been taken:
∑
Slope control is implemented on all the I/O lines with
alternative functions of the PWM, I
2
C-bus and DDC
interface. For port pins P1.4 and P1.5, since the
alternative functions VSYNC
out
and HSYNC
out
are
incorporated, the driving capability is made as small as
possible to reduce radiation and the slope control
function is disabled to have a sharp output. Rise and fall
time (10% to 90%) for slope control are:
t
rf(min)
< rise/fall time < t
rf(max)
.
Refer to Chapter 27 for the detailed figures.
∑
Placing the V
DD
and V
SS
pins next to each other
∑
Double bonding of the V
DD
and V
SS
pins,
i.e. 2 bondpads for each pin
∑
Limiting the drive capability of clock drivers and
prechargers
∑
Applying slew rate controlled output drivers
∑
Internal decoupling of the supply of the CPU core.

1997 Dec 12
23
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.7 Standard output with quasi-bidirectional port.
handbook, full pagewidth
MGG025
p1
p2
p3
input data
read port pin
2 oscillator
periods
n
strong pull-up
I/O PIN
VDD
I1
Q
from port latch
INPUT
BUFFER
Fig.8 Standard output with the pull-up current source.
handbook, full pagewidth
MGG026
p1
p2
p3
input data
read port pin
2 oscillator
periods
n
'1'
strong pull-up
I/O PIN
VDD
I1
Q
from port latch
INPUT
BUFFER
Fig.9 Standard output with the open-drain port.
handbook, full pagewidth
MGG027
p1
p2
input data
read port pin
2 oscillator
periods
n
'0'
strong pull-up
I/O PIN
VDD
I1
Q
from port latch
INPUT
BUFFER

1997 Dec 12
24
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
11 REDUCED POWER MODES
Two software selectable modes of reduced power
consumption are implemented. These are the Idle mode
and the Power-down mode.
11.1
Power Control Register (PCON)
The Idle mode and Power-down mode are activated by
software via the Power Control Register (SFR PCON).
Its hardware address is 87H. PCON is not bit addressable.
The reset value of PCON is 00H.
11.2
Idle mode
Idle mode operation permits the interrupts, I
2
C-bus
interface, DDC interface, mode detection and timer blocks
T0, T1 and T2 (Watchdog Timer) to function while the CPU
is halted. The following functions are switched off when the
microcontroller enters the Idle mode:
∑
CPU (halted)
∑
PWM0 to PWM10 (reset, output = HIGH)
∑
4-bit ADC (aborted if conversion is in progress)
∑
DAC0 to DAC3 (output = indeterminate or frozen at the
final value prior to the Idle instruction; decided by
software).
The following functions remain active during Idle mode;
these functions may generate an interrupt or reset and
thus terminate the Idle mode:
∑
Timer 0, Timer 1 and Timer 2 (Watchdog Timer)
∑
The DDC interface
∑
External interrupt
∑
Mode detection.
The instruction that sets PCON.0 is the last instruction
executed in the normal operating mode before Idle mode
is activated. Once in the Idle mode, the CPU status is
preserved in its entirety: the Stack Pointer, Program
Counter, Program Status Word, Accumulator, RAM and all
other registers maintain their data during Idle mode.
The status of external pins during Idle mode is shown in
Table 28.
There are three ways to terminate the Idle mode:
∑
Activation of any enabled interrupt X0, T0, X1, T1 or S1
will cause PCON.0 to be cleared by hardware
terminating Idle mode. The interrupt is serviced, and
following return from interrupt instruction RETI, the next
instruction to be executed will be the one which follows
the instruction that wrote a logic 1 to PCON.0.
The flag bits GF0 and GF1 may be used to determine
whether the interrupt was received during normal
execution or during Idle mode. For example, the
instruction that writes to PCON.0 can also set or clear
both flag bits. When Idle mode is terminated by an
interrupt, the service routine can examine the status of
the flag bits.
∑
The second way of terminating the idle mode is with an
external hardware reset. Since the oscillator is still
running, the hardware reset is required to be active for
two machine cycles (24 oscillator periods) to complete
the reset operation.
∑
The third way of terminating the Idle mode is by an
internal watchdog reset.
In all cases the microcontroller restarts after 3 machine
cycles.
11.3
Power-down mode
In Power-down mode the system clock is halted. The
oscillator is frozen after setting the bit PD in the PCON
register.
The instruction that sets PCON.1 is the last executed prior
to going into the Power-down mode. Once in Power-down
mode, the oscillator is stopped.The content of the on-chip
RAM and the Special Function Registers are preserved.
Note that Power-down mode can not be entered when the
Watchdog Timer has been enabled.
The Power-down mode can be terminated by an external
reset in the same way as in the 80C51 (but the SFRs are
cleared due to RESET) or in addition by the external
interrupt, INT1.
A termination with INT1 does not affect the internal data
memory and the Special Function Registers. This gives
the possibility to exit from Power-down without changing
the port output levels. To terminate the Power-down mode
with an external interrupt, INT1 must be switched to be
level-sensitive and must be enabled. The external interrupt
input signal INT1 must be kept LOW till the oscillator has
restarted and stabilized. The instruction following the one
that put the device into the Power-down mode will be the
first one which will be executed after the wake-up.

1997 Dec 12
25
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
11.4
Status of external pins
∑
If the HSYNC
out
, VSYNC
out
, PATOUT or CLAMP output
is selected (for selection see description in Tables 8
and 18) in Idle or Power-down mode, since sync
separation is still alive in Idle mode, HSYNC
out
,
VSYNC
out
, PATOUT or CLAMP output will be operating
as normal. In Power-down mode: HSYNC
out
, VSYNC
out
,
PATOUT or CLAMP output are pulled HIGH.
∑
In Idle or Power-down mode, if bit DDCE (SFR DFCON)
is set, the function of P1.2 and P1.3 will be switched to
the DDC interface pins SCL1 and SDA1 respectively. In
Idle mode SCL1 and SDA1 can be active only if DDC1
or DDC2 is enabled; otherwise these pins are in the
high-impedance (High-Z) state.
∑
If bit PWME.n (SFR PWME1/PWME2) is set, the
function of P1.7, P2.n, P3.0 and P3.1 will be switched to
the PWM output function. However, in both Idle and
Power-down modes, the output of those PWM pins are
pulled HIGH.
Table 28 Status of external pins during Idle and Power-down modes
MODE
MEMORY
PORT0
TO
PORT 3
HSYNC;
VSYNC;
CLAMP;
PATOUT
SCL
AND
SDA
SCL1
AND
SDA1
PWM0
TO
PWM10
DAC0
TO
DAC3
Idle
internal
data
operative
High-Z
operative
HIGH
unknown
Power-down
internal
data
HIGH
High-Z
High-Z
HIGH
unknown

1997 Dec 12
26
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
12 OSCILLATOR
The oscillator circuit of the P83C880 is a single-stage
inverting amplifier in a Pierce oscillator configuration. The
circuitry between XTAL1 and XTAL2 is basically an
inverter biased to the transfer point. Either a crystal or
ceramic resonator can be used as the feedback element to
complete the oscillator circuit. Both are operated in parallel
resonance.
XTAL1 is the high gain amplifier input, and XTAL2 is the
output (see Fig.10a). To drive the P83C880 externally,
XTAL1 is driven from an external source and XTAL2 left
open-circuit (see Fig.10b).
b.
External clock drive.
handbook, halfpage
MBE312
XTAL1
XTAL2
n.c.
external clock
(not TTL compatible)
Fig.10 Oscillator configurations.
a.
Crystal oscillator; C = 20 pF.
c.
External clock drive for P87C380.
handbook, halfpage
XTAL1
XTAL2
external clock
(not TTL compatible)
MLC930 - 1
handbook, halfpage
MBE311
XTAL1
XTAL2

1997 Dec 12
27
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
13 RESET
There are three ways to invoke a reset and initialize the
P83C880:
∑
Via the external RESET pin
∑
Via the built-in Power-on-reset circuitry
∑
Via the Watchdog Timer overflow.
Figure 11 illustrates the reset mechanism. Each reset
source will activate an internal reset signal RSTOUT. The
CPU responds by executing an internal reset and puts the
internal registers in a defined state as shown in Table 29.
Table 29 Reset values of the Special Function Registers
X = Undefined. The internal RAM is not affected by reset.
ADDRESS
REGISTER
CONTENT
80H
P0
1111 1111
81H
SP
0000 0111
82H
DPL
0000 0000
83H
DPH
0000 0000
87H
PCON
0000 0000
88H
TCON
0000 0000
89H
TMOD
0000 0000
8AH
TL0
0000 0000
8BH
TL1
0000 0000
8CH
TH0
0000 0000
8DH
TH1
0000 0000
90H
P1
1111 1111
9CH
RAMBUF
0000 0000
9DH
DDCCON
X00X 0000
9EH
DDCADR
0000 0000
9FH
DDCDAT
0000 0000
A0H
P2
1111 1111
A8H
IEN0
0X0X 0000
B0H
P3
XXXX 1111
B8H
IP0
XX0X 0000
C0H
DFCON
1000 0000
C1H
ADCDAT
XX00 0000
C6H
PWM10H
0000 0000
C7H
PWM10L
1000 0000
C8H
PWME1
0000 0000
C9H
PWM0
0000 0000
CAH
PWM1
0000 0000
CBH
PWM2
0000 0000
CCH
PWM3
0000 0000
CDH
PWM4
0000 0000
CEH
PWM5
0000 0000
CFH
PWM6
0000 0000
D0H
PSW
0000 0000
D8H
S1CON
0000 0000
D9H
S1STA
1111 000
DAH
S1DAT
0000 0000
DBH
S1ADR
0000 0000
E0H
ACC
0000 0000
E8H
PWME2
0000 0000
E9H
DAC0
0000 0000
EAH
DAC1
0000 0000
EBH
DAC2
0000 0000
ECH
DAC3
0000 0000
EDH
PWM7
0000 0000
EEH
PWM8
0000 0000
EFH
PWM9
0000 0000
F0H
B
0000 0000
F6H
HFP
0110 0000
F7H
HFPOPW
0000 0101
F8H
MDCST
1X00 0000
F9H
VFP
0100 0000
FAH
VFPOPW
XX00 0101
FBH
PULCNT
0000 0000
FCH
HFHIGH
0000 0000
FDH
VFHIGH
0000 0000
FEH
VFLHFL
0000 0000
FFH
T2
0000 0000
ADDRESS
REGISTER
CONTENT

1997 Dec 12
28
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.11 On-chip reset configuration.
handbook, full pagewidth
MGG022
SCHMITT
TRIGGER
RESET
CIRCUITRY
RRESET
overflow timer T2
Power-on-reset
RSTOUT
8 k
10
µ
F
VDD
on-chip circuit
RESET
POC
13.1
External reset
Pin RESET is connected to a Schmitt trigger for noise
reduction (see Fig.11). A reset is accomplished by holding
the RESET pin HIGH for at least 16 machine cycles (192
system clocks) while the oscillator is running.
An automatic reset can be obtained by switching on V
DD
,
if the RESET pin is connected to V
DD
via a capacitor and
a resistor as illustrated in Fig.11. The V
DD
rise time must
not exceed 10 ms and the capacitor should be at least
10
µ
F. The decrease of the RESET pin voltage depends
on the capacitor and the external resistor R
RESET
. The
voltage must remain above the lower threshold for at least
the oscillator start-up time plus 2 machine cycles.
13.2
Power-on-reset
An on-chip Power-on-reset circuit that detects the supply
voltage rise or fall and accordingly generates a power-on
reset pulse (see Fig.12).
In the case of supply voltage rise, the power-on reset
signal will follow the supply voltage rise; after reaching the
trip level V
t
the power-on reset signal will maintain the
same behaviour, and returns to a LOW state after a time
interval T
p
.
In the case of supply voltage fall, after the trip level V
t
is
reached, the power-on reset signal will follow the
waveform of the supply voltage for time interval T
p
.
The time interval T
p
guarantees that a complete power-on
reset pulse can trigger the internal reset signal. However,
to ensure that the oscillator is stable before the controller
starts, the clock signals are gated away from the CPU for
a further 2048 oscillator cycles.
The values of V
t
, T
p
and a process tolerance of
±
V
t
can
be found in Chapter 25; currently V
t
= 3.9 V, T
p
= 10
µ
s
and
V
t
= 0.3 V.
13.3
T2 (Watchdog Timer Data Register) overflow
The length of the output pulse from T2 is 3 machine cycles.
A pulse of such short duration is necessary in order to
recover from a processor or system fault as fast as
possible.

1997 Dec 12
29
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.12 Power-on reset switching level.
handbook, full pagewidth
MGG023
start-up
2048 clocks
2048 clocks
Tp
Tp
supply
voltage
Power-on-reset
oscillator
CPU
running
Vt
Vt

1997 Dec 12
30
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
14 ANALOG CONTROL (DC)
The P83C880 has eleven Pulse Width Modulated (PWM)
outputs for analog control purposes e.g. brightness,
contrast, E-W, R (or G or B) gain control etc. Each PWM
output generates a pulse pattern with a programmable
duty cycle.
The eleven PWM outputs comprise:
∑
10 PWM outputs with 8-bit resolution (PWM0 to PWM9);
described in Section 14.1.
∑
1 PWM output with 14-bit resolution (PWM10);
described in Section 14.2.
A typical PWM output application is described in
Section 14.3.
14.1
8-bit PWM outputs (PWM0 to PWM9)
PWM outputs PWM0 to PWM9 share the same pins as
port lines P2.0 to P2.7, P3.0 and P3.1 respectively.
Selection of the pin function as either a PWM output or a
port line is achieved using the appropriate PWMnE bit in
SFRs, PWME1 (address C8H) and PWME2 (address
E8H); see Table 4.
The polarity of the PWM outputs is programmable and is
selected by the P8LVL bit in SFR DFCON (address C0H);
see Table 4.
The duty cycle of outputs PWM0 to PWM9 is dependent
on the programmable contents of the data latches: SFRs
PWM0 to PWM9. As the clock frequency of each PWM
circuit is
1
/
4
f
clk
, the pulse width of the pulse generated can
be calculated as:
Where (PWMn) is the decimal value held in the relevant
data latch.
The maximum repetition frequency of the 8-bit PWM
outputs is:
The block diagram for the 8-bit PWM outputs is shown in
Fig.13.
Pulse width
4
PWMn
(
)
◊
f
clk
----------------------------------
=
f
PWM
f
clk
1024
-------------
=
Fig.13 Block diagram for 8-bit PWMs.
handbook, full pagewidth
MGG042
P2.x/P3.x data I/O
P2.x/P3.x/PWMn
8-BIT PWM DATA LATCH
P8LVL
internal data bus
PWMnE
8-BIT DAC PWM
CONTROLLER
Q
Q
fclk
4

1997 Dec 12
31
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.14 PWM0 to PWM9 output patterns.
handbook, full pagewidth
MGG043
256
1
2
3
m
m
+
1
m
+
2
256
1
00
01
m
255
decimal value PWM data latch
4
fclk
14.2
14-bit PWM output (PWM10)
PWM10 shares the same pin as port line P1.7. Selection
of the pin function as either a PWM output or as a port line
is achieved using the PWME2.0 bit in SFR PWME2
(address E8H); see Table 4.
The block diagram for the 14-bit PWM output is shown in
Fig.15 and comprises:
∑
Two 7-bit latches; SFRs PWM10H and PWM10L
∑
14-bit data latch (PWMREG)
∑
14-bit counter
∑
Coarse pulse controller
∑
Fine pulse controller
∑
Mixer.
Data is loaded into the 14-bit data latch (PWMREG) from
the two 7-bit data latches (PWM10H and PWM10L) when
PWM10H is written to. The upper seven bits of PWMREG
are used by the coarse pulse controller and determine the
coarse pulse width; the lower seven bits are used by the
fine pulse controller and determine in which subperiods
fine pulses will be added.
The outputs OUT1 and OUT2 of the coarse and fine pulse
controllers are then `ORed' in the mixer to give the PWM10
output. The polarity of the PWM10 output is programmable
and is selected by the P14LVL bit in SFR DFCON (address
C0H); see Section 7.3.2.
As the 14-bit counter is clocked by
1
/
4
f
clk
, the repetition
times of the coarse and fine pulse controllers may be
calculated as shown below.
Coarse controller repetition time:
Fine controller repetition time:
Figure 16 shows typical PWM10 outputs, with coarse
adjustment only, for different values held in PWM10H,
when P14LVL = 1. Figure 17 shows typical PWM10
outputs when P14LVL = 1, with coarse and fine
adjustment, after the coarse and fine pulse controller
outputs have been `ORed' by the mixer.
When P14LVL = 1, the PWM10 output is inverted.
t
sub
128
4
f
clk
-------
◊
=
t
r
128
128
4
f
clk
-------
◊
◊
=

1997 Dec 12
32
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.15 14-bit PWM block diagram.
handbook, full pagewidth
PWM10L
PWM10H
PWMREG
`MOVE instruction'
`MOV instruction'
DATA LOAD
TIMING PULSE
COARSE 7-BIT
PWM
FINE PULSE
GENERATOR
OUT2
OUT1
MIXER
Q
Q
P14LVL
14-BIT COUNTER
Q14 to 8
Q7 to 1
polarity
control bit
PWM10 output
fclk
MGG044
7
7
7
7
LOAD
internal data bus
4

1997 Dec 12
33
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
14.2.1
C
OARSE ADJUSTMENT
An active HIGH pulse is generated in every subperiod; the
pulse width being determined by the contents of PWM10H.
The coarse output (OUT1) is HIGH at the start of each
subperiod and will remain HIGH until the time
[4/f
clk
◊
(128
-
PWM10H)] has elapsed. The output will
then go LOW and remain LOW until the start of the next
subperiod. The coarse pulse width may be calculated as:
14.2.2
F
INE ADJUSTMENT
Fine adjustment is achieved by generating an additional
pulse in specific subperiods. The pulse is added at the
start of the selected subperiod and has a pulse width of
4/f
clk
. The contents of PWM10L determine in which
subperiods a fine pulse will be added. It is the logic 0 state
of the value held in PWM10L that actually selects the
subperiods. When more than one bit is a logic 1 then the
subperiods selected will be a combination of those
subperiods specified in Table 30.
Pulse duration
PWM10H
(
)
4
f
clk
-------
◊
=
For example, if PWM10L = 000 0101 then this is a
combination of:
∑
PWM10L = 000 0001: subperiod 64
∑
PWM10L = 000 0100: subperiods 16, 48, 80 and 112.
Pulses will be added in subperiods 16, 48, 64, 80 and 112.
This example is illustrated in Fig.18.
When PWM10L holds 000 0000 fine adjustment is
inhibited and the PWM10 output is determined only by the
contents of PWM10H.
Table 30 Additional pulse distribution
PWM10L
ADDITIONAL PULSE IN SUBPERIOD
000 000
1
64
000 0010
32 and 96
000 0100
16, 48, 80 and 112
000 1000
8, 24, 40, 56, 72, 88, 104 and 120
001 0000
4, 12, 20, 28, 36, 44, 52...116 and 124
010 0000
2, 6, 10, 14, 18, 22, 26, 30...122 and 126
100 0000
1, 3, 5, 7, 9, 11, 13, 15, 17...125 and 127
Fig.16 PWM10 output patterns: Coarse adjustment only.
handbook, full pagewidth
127
0
1
2
128
-
(m
+
1)
128
-
(m
-
1)
128
-
m
127
0
1
00
01
m
127
decimal value PWM7H data latch
4
fclk
MGG045

1997 Dec 12
34
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync
P83Cx80; P87C380
Fig.17 PWM10 output patterns: Coarse and fine adjustment (PWM10L = 000 0000B).
handbook, full pagewidth
MGG046
127
0
1
2
127
0
1
00
01
m
127
decimal value PWM10H data latch
4
fclk
128
-
(m
+
1)
128
-
(m
-
1)
128
-
m
Fig.18 Fine adjustment output (OUT2).
handbook, full pagewidth
MGG047
tsub0
tsub16
tsub32
tsub48
tsub64
tsub80
tsub96
tsub112
tsub127
tr
000 0001
000 0100
000 0101
PWM10L

1997 Dec 12
35
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
14.3
A typical PWM output application
A typical PWM application is shown in Fig.19. The buffer is
optionally used to reduce the influence from supply/ground
bouncing to another circuit. R1 and C1 form the integration
network, the time constant of which should be equal to or
greater than 5 times the repetition period of the PWM
output pattern. In order to smooth a changing PWM output
a high value of C1 should be chosen. The value of C1 will
normally be in the range 1 to 10
µ
F. The potential divider
chain formed by R2 and R3 is used only when the output
voltage is to be offset. The output voltages for this
application are calculated using Equations (1) and (2).
(1)
(2)
The loop from the PWM pin through R1 and C1 to V
SS
will
radiate high frequency energy pulses. In order to limit the
effect of this unwanted radiation source, the loop should
be kept short and a high value of R1 selected. The value
of R1 will normally be in the range 3.3 to 100 k
. It is good
practice to avoid sharing V
SS
(pin 12) with the return leads
of other sensitive signals.
V
max
R3
V
DD
◊
R3
R1
R2
◊
R1
R2
+
----------------------
+
-------------------------------------
=
V
min
R1
R3
◊
R1
R3
+
----------------------
V
DD
◊
R2
R1
R3
◊
R1
R3
+
----------------------
+
---------------------------------------
=
Fig.19 Typical PWM output circuit.
andbook, halfpage
MGG048
C1
R3
R1
R2
DEVICE
TYPE NR.
(1)
PWMn
VSS
supply
voltage
analog
output
(1) P83Cx80; P87C380

1997 Dec 12
36
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
15 ANALOG-TO-DIGITAL CONVERTER (ADC)
The ADC inputs ADC0 and ADC1 share the same pins as
port lines P3.2 and P3.3 respectively. Selection of the pin
function as either an ADC input or as a port line is achieved
using bit ADCE in SFR DFCON (address C0H). When
ADCE = 1, the ADC function is enabled; see Section 7.3.2,
Table 8.
The two channel ADC comprises a 4-bit Digital-to-Analog
Converter (DAC); a comparator; an analog channel
selector and control circuitry. As the digital input to the 4-bit
DAC is loaded by software (a subroutine in the program),
it is known as a software ADC. The block diagram is shown
in Fig.20.
The 4-bit DAC analog output voltage (V
ref
) is determined
by the decimal value of the data held in bits DAC0 to DAC3
(DAC value) of SFR ADCDAT (address C1H). V
ref
is
calculated as:
Table 31 lists the V
ref
values as function of DAC3 to DAC0.
When the analog input voltage is higher than V
ref
, the
COMP bit in SFR ADCDAT (address C1H) will be HIGH.
The channel selector, consisting of two analog switches, is
controlled by bit DACHL in SFR ADCDAT; see Table 32.
Table 31 Selection of V
ref
DAC3
DAC2
DAC1
DAC0
V
ref
(V)
0
0
0
0
1
/
16
◊
V
DD
0
0
0
1
2
/
16
◊
V
DD
0
0
1
0
3
/
16
◊
V
DD
0
0
1
1
4
/
16
◊
V
DD
0
1
0
0
5
/
16
◊
V
DD
0
1
0
1
6
/
16
◊
V
DD
0
1
1
0
7
/
16
◊
V
DD
0
1
1
1
8
/
16
◊
V
DD
1
0
0
0
9
/
16
◊
V
DD
1
0
0
1
10
/
16
◊
V
DD
1
0
1
0
11
/
16
◊
V
DD
1
0
1
1
12
/
16
◊
V
DD
1
1
0
0
13
/
16
◊
V
DD
1
1
0
1
14
/
16
◊
V
DD
1
1
1
0
15
/
16
◊
V
DD
1
1
1
1
V
DD
V
ref
V
DD
16
----------
DAC value
1
+
(
)
◊
=
Table 32 Selection of ADC channel
15.1
Conversion algorithm
There are many algorithms available to achieve the ADC
conversion. The algorithm described below and shown in
Fig.21 uses an iteration process.
1. Select ADCn channel for conversion. Channel
selection is achieved using bit DACHL, SFR ADCDAT
(address C1H).
2. Set the digital input to the DAC to 1000. The digital
input to the DAC is selected using bits DAC3 to DAC0
(SFR ADCDAT).
3. Determine the result of the compare operation. This is
achieved by reading the COMP bit in SFR ADCDAT
using the instruction `MOV A, ADCDAT'. If COMP = 1;
the analog input voltage is higher than the reference
voltage (V
ref
). If COMP = 0; the analog input voltage is
lower than the reference voltage (V
ref
).
4. If COMP = 1; then the analog input voltage is higher
than the reference voltage (V
ref
) and therefore the
digital input to the DAC needs to be increased. Set the
input to the DAC to 1100.
5. If COMP = 0; then the analog input voltage is lower
than the reference voltage (V
ref
) and therefore the
digital input to the DAC needs to be decreased. Set the
input to the DAC to 0100.
6. Determine the result of the compare operation by
reading the COMP bit in SFR ADCDAT.
7. For the DAC = 1100 case.
If COMP = 1; then the analog input voltage is still
greater than V
ref
and therefore the digital input to the
DAC needs to be increased again. Set the input to the
DAC to 1110.
If COMP = 0; then the analog input voltage is now less
than V
ref
and therefore the digital input to the DAC
needs to be decreased. Set the input to the DAC to
1010.
DACHL
CHANNEL SELECTED
0
ADC0
1
ADC1

1997 Dec 12
37
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
8. For the DAC = 0100 case.
If COMP = 1; then the analog input voltage is now
greater than V
ref
and therefore the digital input to the
DAC needs to be increased. Set the input to the DAC
to 0110.
If COMP = 0; then the analog input voltage is still lower
than V
ref
and therefore the digital input to the DAC
needs to be decreased again. Set the input to the DAC
to 0010.
9. The operations detailed in 5, 6 and 7 above are
repeated and each time the digital input to the DAC is
changed accordingly; as dictated by the state of the
COMP bit.
The complete process is shown in Fig.21. Each time
the DAC input is changed the number of values which
the analog input can take is reduced by half. In this
manner the actual analog value is honed into. The
value of the analog input (V
A
) is determined by the
formulae:
As the conversion time of each compare operation is
greater than 6
µ
s but less than 9
µ
s; a NOP instruction is
recommended to be used in between the instructions that
select V
ref
; the ADC channel and read the COMP bit.
V
A
V
DD
16
----------
DAC value
1
+
(
)
◊
=
Fig.20 Block diagram of the ADC.
handbook, full pagewidth
4-BIT DAC
COMPARATOR
DAC3
DAC2
DAC1
DAC0
ADCE
DACHL
MGG049
ADC enable selection
DAC value selection
ENABLE
SELECTOR
ADC
CHANNEL
SELECTOR
P3.2/ADC0
P3.3/ADC1
Vref
EN
PORT INTERFACE
EN1
EN0
MOV A, ADCDAT
instruction
to read COMP bit
COMP bit
internal bus
channel selection
+
-

1997 Dec 12
38
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
handbook, full pagewidth
MBK518
Value = 0111
COMP = 1
T
+
0100
+
0010
-
0010
+
0001
+
0001
-
0001
-
0001
+
0010
-
0010
+
0001
+
0001
-
0001
-
0001
-
0100
F
Value = 1011
COMP = 1
TF
Value = 1101
COMP = 1
TF
Value = 1110
COMP = 1
Value = 1100
COMP = 1
TF
1111
1110
TF
1101
1100
Value = 1001
COMP = 1
TF
Value = 1010
COMP = 1
Value = 1000
COMP = 1
TF
1010
TF
1001
1000
1011
Value = 0011
COMP = 1
TF
Value =0101
COMP = 1
TF
Value = 0110
COMP = 1
Value = 0100
COMP = 1
TF
0111
0110
TF
0101
0100
Value = 0001
COMP = 1
TF
Value = 0010
COMP = 1
Value = 0000
COMP = 1
TF
0010
TF
0001
0011
0000
Fig.21 Example of converting algorithm for software ADC.
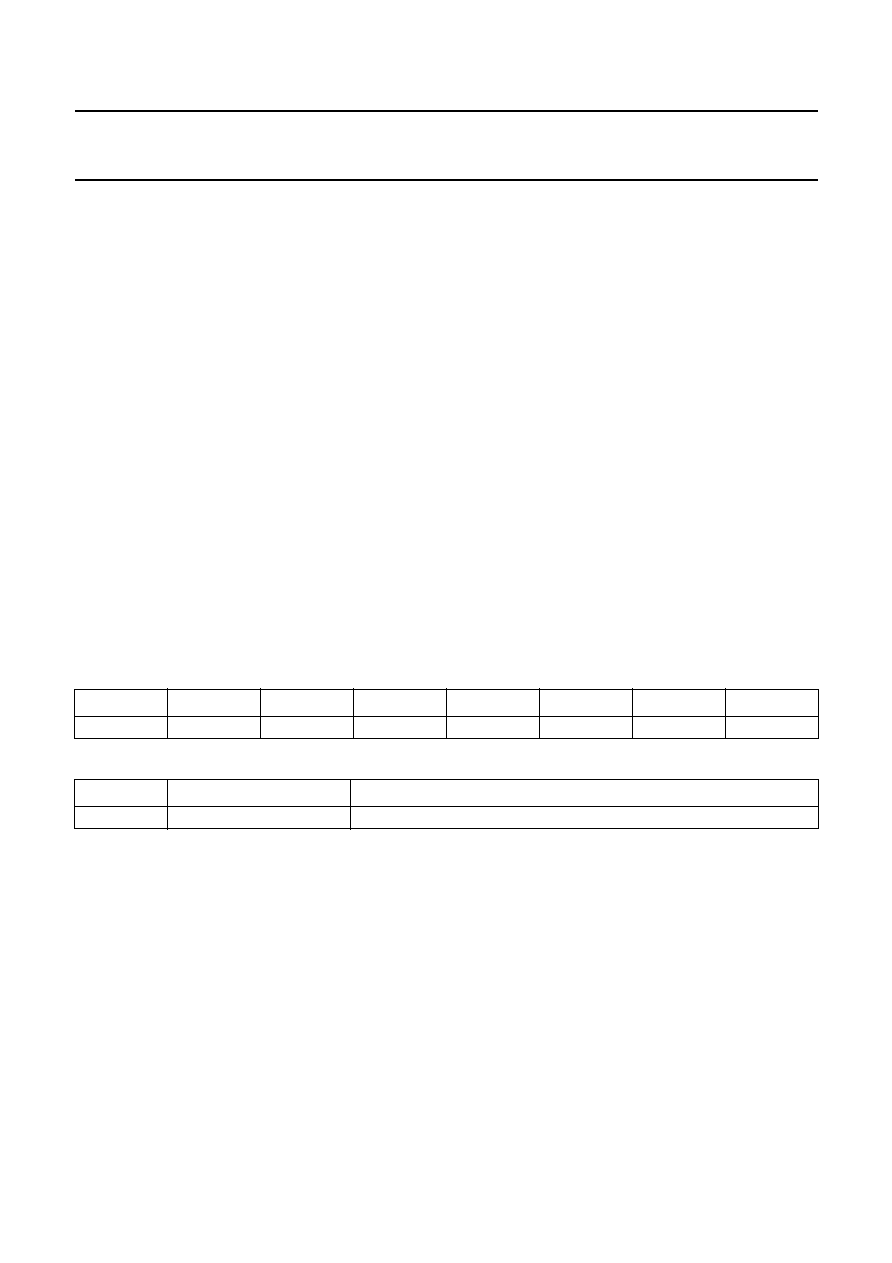
1997 Dec 12
39
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
16 DIGITAL-TO-ANALOG CONVERTER (DAC)
Four channels of linear voltage outputs mainly for the
horizontal and vertical position control are provided from
four sets of the Digital-to-Analog Converter (DAC).
The DACs are well tuned to meet the following specific
system requirements of the monitor.
∑
For a 21'' monitor, the shift per step by changing the data
of the DAC is expected to be 0.5 mm. Accordingly, the
DAC with 8-bit resolution is required.
∑
To avoid visible position shift due to environmental
temperature change, the drift of output level of the DAC
is less than 1.5 mV/
∞
C.
∑
To eliminate the visible jitter, the maximum tolerable
ripple for the output voltage of the DAC is less than
2 mV.
Each DAC comprises an 8-bit data latch, a voltage scaling
mechanism and an output driver.
A precise current reference is provided internally to serve
4 sets of DACs. The voltage sources with values weighted
by 2
0
up to 2
7
are switched according to the data input so
that the sum of the selected voltages gives the required
analog voltage from the output driver.
The range of the output voltage is approximately 0 to 5 V.
However, to fulfil some special requirement for current
driving capability, a very minor reduction (0.2 to 0.4 V) of
the output voltage range is acceptable.
The DAC outputs are protected against short-circuits to
V
DDA
and V
SSA
. To avoid the possibility of oscillation,
capacitive loading at the DAC outputs should not exceed
10 pF. In reduced power modes like Idle mode and
Power-down mode, the operation of the DACs can be
disabled to save the power consumption. In that case, the
outputs of the DACs are indeterminate.
Figure 20 illustrates the block diagram of the DAC.
16.1
8-bit Data Registers for the DAC outputs
(DACn; n = 0 to 3)
The DACs are individually programmed using an 8-bit
word to select an output from one of 256 voltage steps. For
V
DDA
= 5 V, the maximum output voltage of all DACs is 5 V
and the resolution is approximately 17.6 mV (5 V/256). At
power-on all DAC outputs are set to their lowest value:
00H (i.e. 0 V). The relevant SFRs for the DACs are
described in Table 33 and 34.
Table 33 8-bit Data Registers for the DAC outputs (address E9H to ECH)
Table 34 Description of DACn bits
7
6
5
4
3
2
1
0
DACn.7
DACn.6
DACn.5
DACn.4
DACn.3
DACn.2
DACn.1
DACn.0
BIT
SYMBOL
DESCRIPTION
7 to 0
DACn.7 to DACn.0
8-bit data for the DAC; channel n (n = 0 to 3).

1997 Dec 12
40
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.22 Block diagram of the DAC.
handbook, full pagewidth
MGG050
8
DATA LATCH
(SFR ADDRESS E9H)
DAC0
REFERENCE
VOLTAGE/CURRENT
GENERATOR
DAC1
DATA LATCH
(SFR ADDRESS EAH)
internal bus
DATA LATCH
(SFR ADDRESS EBH)
DAC2
DATA LATCH
(SFR ADDRESS ECH)
DAC3
DAC0
DAC1
DAC2
DAC3
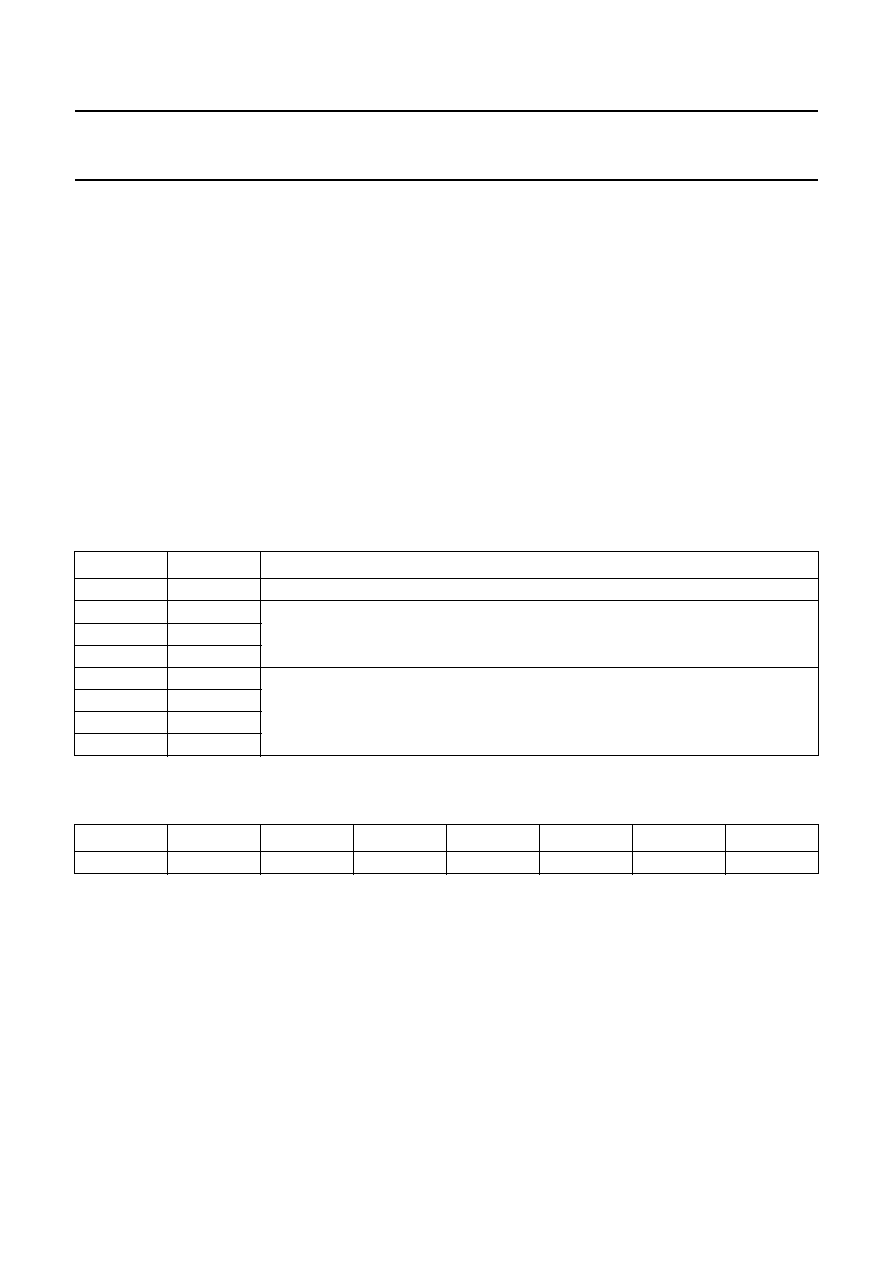
1997 Dec 12
41
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
17 DISPLAY DATA CHANNEL (DDC) INTERFACE
The monitor typically includes a number of user controls to
set picture size, position, colour balance, brightness and
contrast. Furthermore, to optimize some internal setting for
different display modes, the timing characteristics should
be acquired by the control side. For factory alignment, it is
preferable to store the entire information in a non-volatile
memory to facilitate production automation. Normally,
monitors provide hardware control panels or a keypad to
perform this control. However, it is now popular for these
controls to go to the PC host. Therefore the
communication between monitor and host becomes an
issue. DDC1, DDC2B, DDC2B+ and DDC2AB
(ACCESS.bus) emerge as a standard for monitor
interface.
P83C880 is compliant to DDC1, DDC2B, DDC2B+ and
DDC2AB (ACCESS.bus). They also conform to the
detection sequence defined by VESA and ACCESS.bus
Industry Group and identify the protocol which they are
communicating with.
A transmitter clocked by the incoming VSYNC is dedicated
for DDC1 operation. An I
2
C-bus interface hardware logic
forms the kernel of DDC2B and DDC2AB. An address
pointer, DDCADR (address 9EH), with post increment
capability is employed to serve DDC1, DDC2B, DDC2B+
and DDC2AB modes.
The conceptual block diagram is illustrated in Fig.23.
17.1
Special Function Registers related to the DDC interface
Table 35 SFRs related to the DDC interface
17.1.1
DDC M
ODE
S
TATUS AND
DDC1 C
ONTROL
R
EGISTER
(DDCCON)
Table 36 DDC Mode Status and DDC1 Control Register (address 9DH)
ADDRESS
SFR
REMARKS
9CH
RAMBUF
See Section 7.3.1.
9DH
DDCCON
DDCCON, DDCADR and DDCDAT are mainly created for the DDC1 protocol; they are
explained in Sections 17.1.1 to 17.1.3.
9EH
DDCADR
9FH
DDCDAT
D8H
S1CON
One extra I
2
C-bus interface is used to serve DDC2B, DDC2B+ and DDC2AB. Therefore
S1CON, S1STA, S1DAT and S1ADR are just the copies of the corresponding registers
in the general I
2
C-bus interface. Their usage is exactly the same.
D9H
S1STA
DAH
S1DAT
DBH
S1ADR
7
6
5
4
3
2
1
0
-
EX_DAT
SWENB
-
DDC1_int
DDC1enable
SWH_int
M0
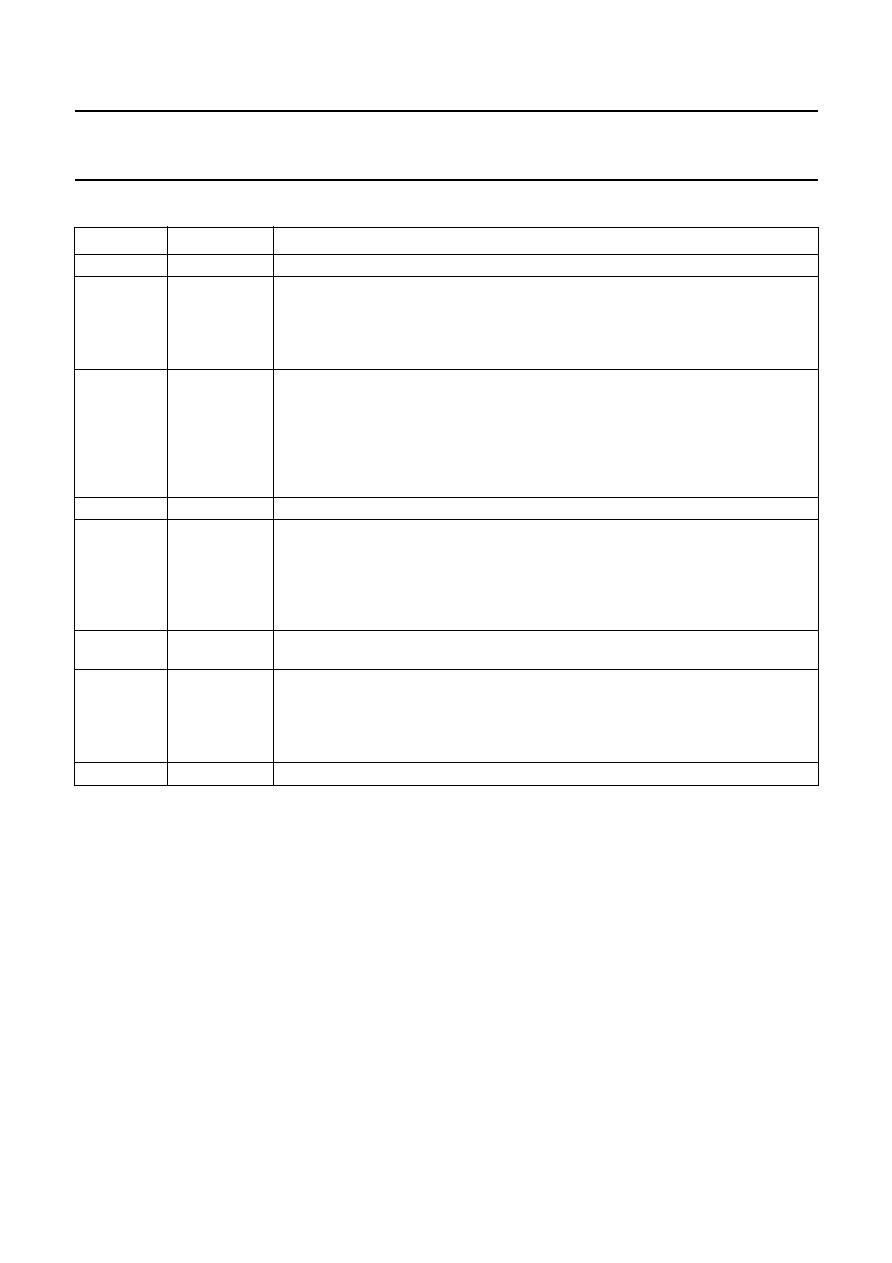
1997 Dec 12
42
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Table 37 Description of DDCCON bits
Note
1. These bits are R/W.
BIT
SYMBOL
DESCRIPTION
7
-
Reserved.
6
EX_DAT
This bit defines the size of the EDID data. It is related to the function of the post
increment of the address pointer, DDCADR. When the upper limit is reached, the
address pointer will wrap around to 00H. If EX_DAT = 1, the data size is 256 bytes.
If EX_DAT = 0, the data size is 128 bytes; the addressing range for the EDID data
buffer is mapped from 0 to 127, the rest (128 to 255) can still be used by the system.
5
SWENB
This bit indicates if the software/CPU is needed to take care of the operation of DDC1
protocol. If SWENB = 1, in DDC1 protocol, the CPU is interrupted during the period of
the 9th transmitting bit so that the software service routine can update the hold
register of the transmitter by moving new data from the appropriate area (it is not
necessary to be the RAM buffer). This transferring must be done within 40
µ
s.
If SWENB = 0, the hold register of the transmitter will be automatically updated from
the RAM buffer without the intervention of the CPU.
4
-
Reserved.
3
DDC1_int
(1)
Interrupt request bit (002BH is assigned as the interrupt vector address). This bit is only
valid in DDC1 protocol while software handling is enabled (SWENB = 1). This bit is set
by hardware and should be cleared by software in an interrupt service routine. If DDC1
is fully under the hardware control (SWENB = 0), this bit can be ignored.
If DDC1_int = 1, interrupt request is pending. If DDC1_int = 0, there are no interrupt
request.
2
DDC1enable
(1)
DDC1 enable control bit. If DDC1enable = 1, DDC1 is enabled. If DDC1enable = 0,
DDC1 is disabled (the activity on VCLK is ignored).
1
SWH_int
(1)
Interrupt request bit (002BH is assigned as the interrupt vector address). This bit is
used to indicate that DDC interface switches from DDC1 to DDC2 (i.e. the
HIGH-to-LOW transition is observed on pin SCL1). This bit should be cleared by
software in an interrupt service routine. If SWH_int = 1, interrupt request is pending.
If SWH_int = 0, there is no interrupt request.
0
M0
(1)
DDC mode indication bit. If M0 = 0, DDC1 is set; if M0 = 1, DDC2 is set.

1997 Dec 12
43
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
17.1.2
A
DDRESS
P
OINTER FOR
DDC I
NTERFACE
R
EGISTER
(DDCADR)
The bits of this register are all R/W.
Table 38 Address Pointer for DDC Interface Register (address 9EH)
Table 39 Description of DDCADR bits
17.1.3
DDC1 D
ATA
T
RANSMISSION
R
EGISTER
(DDCDAT)
Table 40 DDC1 Data Transmission Register (address 9FH)
Table 41 Description of DDCDAT bits
7
6
5
4
3
2
1
0
DDCADR.7
DDCADR.6
DDCADR.5
DDCADR.4
DDCADR.3
DDCADR.2
DDCADR.1
DDCADR.0
BIT
SYMBOL
DESCRIPTION
7 to 0
DDCADR.7 to DDCADR.0
Address pointer with the capability of post increment. After each access
to RAMBUF register (either by software or by hardware DDC1 interface),
the content of this register will be increased by one. It is available both in
DDC1, DDC2 (DDC2B, DDC2B+ and DDC2AB) and system operation.
7
6
5
4
3
2
1
0
DDCDAT.7
DDCDAT.6
DDCDAT.5
DDCDAT.4
DDCDAT.3
DDCDAT.2
DDCDAT.1
DDCDAT.0
BIT
SYMBOL
DESCRIPTION
7 to 0
DDCDAT.7 to DDCDAT.0
Data byte to be transmitted in DDC1 protocol.

1997 Dec 12
44
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.23 DDC interface block diagram.
handbook, full pagewidth
MGG030
CR2 ENS STA STO
SI
AA CR1 CR0
0
0
0
SC0
SC1
SC2
SC3
SC4
BUS CLOCK GENERATOR
SHIFT REGISTER
MONITOR ADDRESS
0
1
7
DDC1 HOLD REGISTER
DDC1 TRANSMITTER
INITIALIZATION SYNCHRONIZATION
ARBITRATION LOGIC
S1ADR(DBH)
S1DAT(DAH)
S1CON(D8H)
S1STA(D9H)
DDC2B/DDC2AB/DDC2B
+
INTERFACE
DDC1/DDC2
DETECTION
SIO2
INTERNAL BUS
AUX-RAM
BUFFER
RAMBUF
ADDRESS POINTER
SDA1
SCL1
VCLK
(from S1CON)
SI
INT
(interrupt vector 002BH)
DDCDAT(9FH)
DDC1
enable
DDC1_int
-
-
SWH_int
SWENB
EX_DAT
M0
DDCCON(9DH)
RAMBUF(9CH)
DDCADR(9EH)

1997 Dec 12
45
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
17.2
Host type detection
The detection procedure conforms to the sequences
proposed by
"VESA Monitor Display Data Channel (DDC)
specification". The monitor needs to determine the type of
host system:
∑
DDC1 or OLD type host
∑
DDC2B host (host is master, monitor is always slave)
∑
DDC2B+/DDC2AB (ACCESS.bus) host.
The sequence of detection is described in the flow chart
illustrated in Fig.24.
The monitor where P83C880 resides is always both DDC1
and DDC2 compatible with DDC2 having the higher
priority. The display (i.e. P83C880) shall start transmitting
DDC1 signals whenever it is switched on and VSYNC is
applied to it from the host for the first time. The display
shall switch to DDC2 within 3 system clocks as soon as it
sees a HIGH-to-LOW transition on the clock line (SCL),
indicating that there are both DDC2 devices connected to
the bus. Under that condition, the Mode flag M0 will be
changed from the default setting logic 0 to logic 1.
Accordingly, the interrupt will be invoked by setting flag
SWH_int (DDCCON.1) as HIGH (this flag must be cleared
by the interrupt service routine). This procedure will cause
a transmission error. However, both the display and the
host shall have error detection and a method to recover
from the temporary transmission errors.
Figure 24 illustrates the concept and interaction between
the monitor and the host. After power-on, the DDC1enable
bit (DDCCON.2) is set by software, setting the monitor as
a DDC1 device. Therefore, the Mode flag M0, is set as
logic 0. Following VSYNC as clock, the monitor (i.e.
P83C880) will transmit EDID data stream to the host.
However, if DDC2 clock (SCL clock) is present, the
monitor will be switched to DDC2B device with the Mode
flags setting as logic 1. Software will determine whether it
is a DDC2B, DDC2B+, or DDC2AB protocol.
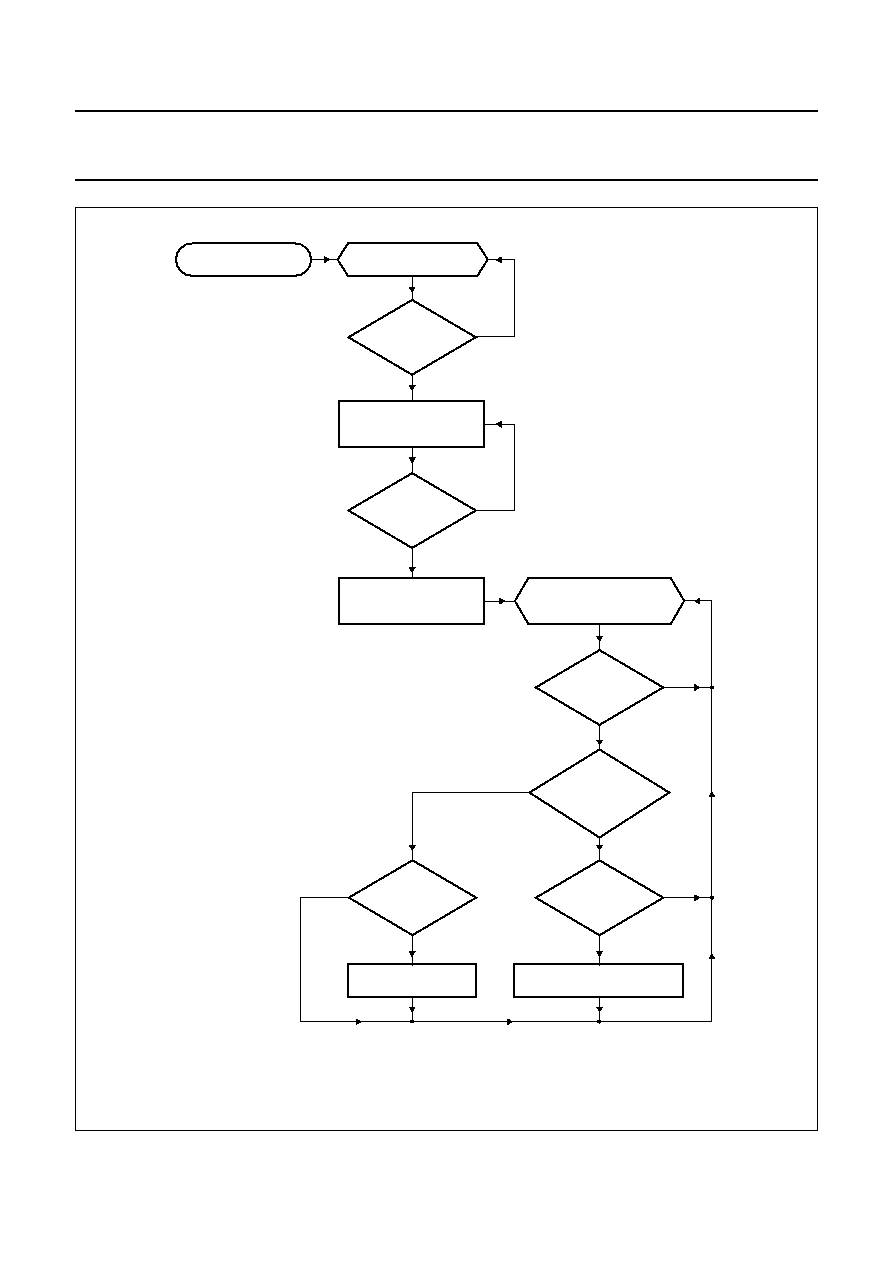
1997 Dec 12
46
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
handbook, full pagewidth
MGG031
IS
MONITOR
DDC2B
+
/DDCAB2
CAPABLE?
RESPOND TO DDC2B
+
/DDCAB2
COMMAND
DDC2 COMMUNICATION
IS IDLE. MONITOR IS
WAITING FOR A COMMAND
NO
YES
RESPOND TO DDC2B
COMMAND
YES
IS
DDC2B
+
/DDCAB2
COMMAND
DETECTED?
NO
YES
IS
COMMAND DDC2B
COMMAND?
NO
HAS A
COMMAND BEEN
RECEIVED?
NO
YES
MONITOR POWER-ON
STOP SENDING OF EDID
SWITCH TO DDC2
COMMUNICATION MODE
(1)
NO
YES
NO
IS VSYNC
PRESENT?
IS DDC2 CLOCK
PRESENT?
EDID SENT
CONTINUOUSLY USING
VSYNC AS CLOCK
COMMUNICATION IS IDLE
Fig.24 Host type detection.
(1) Once the monitor switches from DDC1 mode to DDC2 mode it will
remain in DDC2 mode for the duration of that power-on period.

1997 Dec 12
47
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
17.3
DDC1 protocol
The DDC1 is a primitive interface, but adopted by many
monitor models and PC hosts. It is a point-to-point
interface. The monitor is always set to `Transmit only'
mode. In the initialization phase, 9 clock cycles on the
VCLK pin will be given for the internal synchronization.
During this period, the SDA pin will be kept in the
high-impedance state. By default, bit `DDC1enable' is
reset as logic 0. It is advised to move the EDID data to the
RAM buffer before enabling DDC1. To activate the DDC1
interface, DDC1enable flag is set to logic 1 and it is taken
as granted that Mode flag M0 is set at logic 0. If SWENB is
kept at the default value logic 0, the RAM buffer will be tied
to the DDC1 protocol. The allocated size from the RAM
buffer is decided by the flag EX_DAT. If EX_DAT is LOW,
only 128 bytes are reserved to store DDC1 EDID data. The
upper part (locations 128 to 255) is still available to the
system. If EX_DAT is HIGH, the entire 256 bytes of the
RAM buffer are dedicated to the usage of DDC1 operation.
The hardware mechanism will automatically move new
data from the defined RAM buffer to the hold register of the
transmitter with the aid of the address pointer DDCADR.
Within the range of DDC1 RAM buffer, the function of the
post increment is executed. If the upper limit is reached,
the address pointer DDCADR will wrap around to 00H.
However, if EX_DAT = LOW, the lower part is occupied by
the DDC1 operation and the upper part is still free to the
system. Nevertheless, the effect of the post increment just
applies to the part related to the DDC1 operation. In other
words, the system program is still able to address the
locations from 128 to 255 in the RAM buffer through the
MOVX command but without the facility of the post
increment; e.g. in case EX_DAT = LOW and
SWENB = LOW, the system program might read one data
byte from address 200 of the RAM buffer by the following
procedure:
MOV R0, #200; MOVX A, @R0.
The address pointer DDCADR is tied to the DDC1
transmitter here. To avoid the interference to the content
of DDCADR, it has to address the RAM buffer through the
MOVX command. While EX_DAT = HIGH, the entire RAM
buffer is covered by the pointing range of the address
pointer DDCADR, with the capability of the post increment;
no matter whether the access is done by DDC1 related
hardware (SWENB = 0) or software (SWENB = 1).
If SWENB is set at logic 1, then after the valid
synchronization, the DDC1 interrupt will be invoked
(interrupt vector address 002BH). The service routine
should fill the hold register DDCDAT (SFR address 9FH)
with the first data byte either from the internal ROM (part
of the system ROM) or from the RAM buffer. In the latter
case, the address pointer DDCADR will provide the benefit
of the post increment for the service routine to read/write
the DDC1 EDID data area. This action must be finished
within 40
µ
s (40 machine cycles in 12 MHz system clock).
DDC1_int flag must be cleared by software before it
returns from service routine. On the rising edge of the 10th
clock cycle, the device will output the first valid data bit
which should be the most significant bit of a byte.
The following data is also transmitted on the SDA pin in
8 bits per byte format. Each byte is followed by a 9th clock
pulse during which time SDA is left high-impedance and
either the hardware mechanism (SWENB = 0) or the
service routine (SWENB = 1) will update the hold register.
The data bit is output on the rising edge of VCLK, the most
significant bit first. The address pointer is initialized at 00H.
After writing a data byte to the hold register through
hardware or software, it will be incremented by one
automatically. If the address reaches 127 (EX_DAT = 0) or
255 (EX_DAT = 1) the address pointer will wrap around to
the first location: 00H. Nevertheless, it is possible for CPU
(in software mode, i.e. SWENB = 1) to write any desired
address to the address pointer to proceed random access.
The transaction in DDC1 protocol is shown in Fig.25.
If DDC1 hardware mode is used, the following DDC1
operation steps are recommended:
1. Reset DDC1enable (by default DDC1enable is cleared
to LOW after power-on reset).
2. Set SWENB to HIGH.
3. Depending on the data size of EDID data, set EX_DAT
to LOW (128 bytes) or HIGH (256 bytes).
4. Use substantial moving commands (DDCADR,
RAMBUF involved) to move the entire EDID data to
RAM buffer.
5. Reset SWENB to LOW.
6. Reset DDCADR to 00H.
7. Set DDC1enable to HIGH enabling the DDC1
hardware; during the synchronization phase (the first 9
VCLK clocks) the first data byte will be loaded into the
shift register of the transmitter through the hold
register.
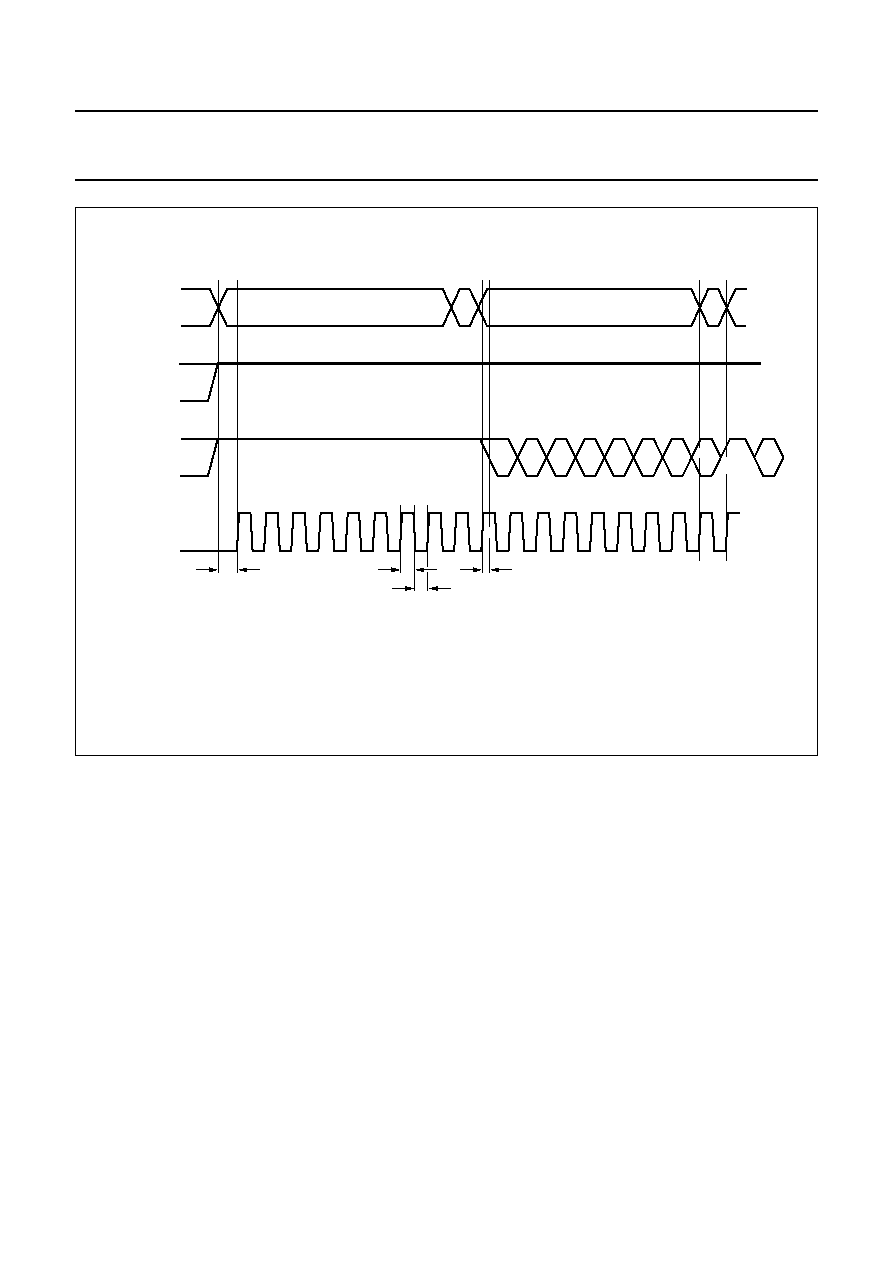
1997 Dec 12
48
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.25 Transmission protocol in DDC1 interface.
handbook, full pagewidth
MGG032
1
2
3
4
5
6
7
8
9
1
2
3
1
4
5
6
7
8
9
BIT
7
BIT
6
BIT
5
BIT
4
BIT
3
BIT
2
BIT
1
BIT
0
BIT
7
High Z
00
01
11
01
11
01
DDC1_INT
DDC1 enable
SCL
SDA
VCLK
tsu(DDC1)
tVCLKH
tVCLKL
tDOV
High Z
17.4
DDC2B protocol
The DDC2B construction is based on the Philips I
2
C-bus
interface. However, in the level of DDC2B, PC host is fixed
as the master and the monitor is always regarded as the
slave. Both master and slave can be operated as a
transmitter or receiver, but the master device determines
which mode is activated. For details of the I
2
C-bus
interface, please refer to the Philips publication
"The I
2
C-bus and how to use it" ordering number
9398 393 40011 and/or the
"Data Handbook IC20".
In the P83C880, one more pair of I
2
C-bus pins SCL1,
SDA1 and an I
2
C-bus hardware interface logic are
dedicated to perform DDC2B/DDC2B+/DDC2AB
protocols. The built-in address pointer mentioned in
Section 17.3 can be used to speed up the processing of
service routines for the access of the internal ROM or a
dedicated RAM buffer.
According to the DDC2B specification:
∑
A0H (for write mode) and
∑
A1H (for read mode),
are assigned as the default address of monitors.
The reception of the incoming data in write mode or the
updating of the outgoing data in read mode should be
finished within the specified time limit. However, it is not
necessary for EDID data to be stored on-chip. It is also
possible to have access to the external EEPROM/ROM
through another set of I
2
C-bus interface and pre-store
those data in the RAM buffer. If software on the slave side
cannot react to the master in time, based on I
2
C-bus
protocol, SCL pin can be stretched LOW to inhibit the
further action from the master. The transaction can be
proceeded in either byte or burst format.

1997 Dec 12
49
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
17.5
DDC2AB/DDC2B+ protocol
DDC2AB/DDC2B+ is a superset of DDC2B. Monitors that
implement DDC2AB/DDC2B+ are full featured
ACCESS.bus devices. Essentially, they are similar to
DDC2B. The I
2
C-bus interface forms the fundamental
layer for both protocols. However, in DDC2AB/DDC2B+
the default address for monitors is assigned to 6EH
instead of A0H and A1H in DDC2B. Monitors and hosts
can play both the roles of master and slave. Under this
kind of protocol, it is easy to extend the support for hosts
to read VESA Video Display Information Format (VDIF)
and remotely control monitor functions.
The read/write protocols can be the same as described in
Section 17.4.
Nevertheless, the command/information sequence
between host and monitor must conform to the
specification of ACCESS.bus.
Timing rules specified in ACCESS.bus such as maximum
response time to RESET message (<250 ms) from host,
maximum time to hold SCL LOW (<2 ms) etc., can be
satisfied through software checks and built-in timers such
as Timer 0 and Timer 1 in the P83C880. In
DDC2AB/DDC2B+ the monitor itself can act as a master to
activate the transaction. The default address assigned for
the host is 50H.
Figure 26 shows the overview and relationship between
software and the existing I
2
C-bus hardware for the DDC
interface.
Fig.26 The conceptual structure of the DDC interface.
handbook, full pagewidth
MGG035
DDC INTERRUPT
VECTOR ADDRESS
(002BH)
MODE = 1
CHECK MODE FLAG IN DDCCON
MODE = 0
DDC2B
+
/DDC2AB
COMMAND
RECEIVED
DDC2B
COMMAND
RECEIVED
DDC2B
+
/DDC2AB
UTILITIES
DDC2B
UTILITIES
I
2
C-BUS
SERVICE ROUTINES
DDC1
UTILITIES
I
2
C-BUS INTERFACE
(HARDWARE)
DDC1 TRANSMITTER
(HARDWARE)
SWENB = 0
SWENB = 1
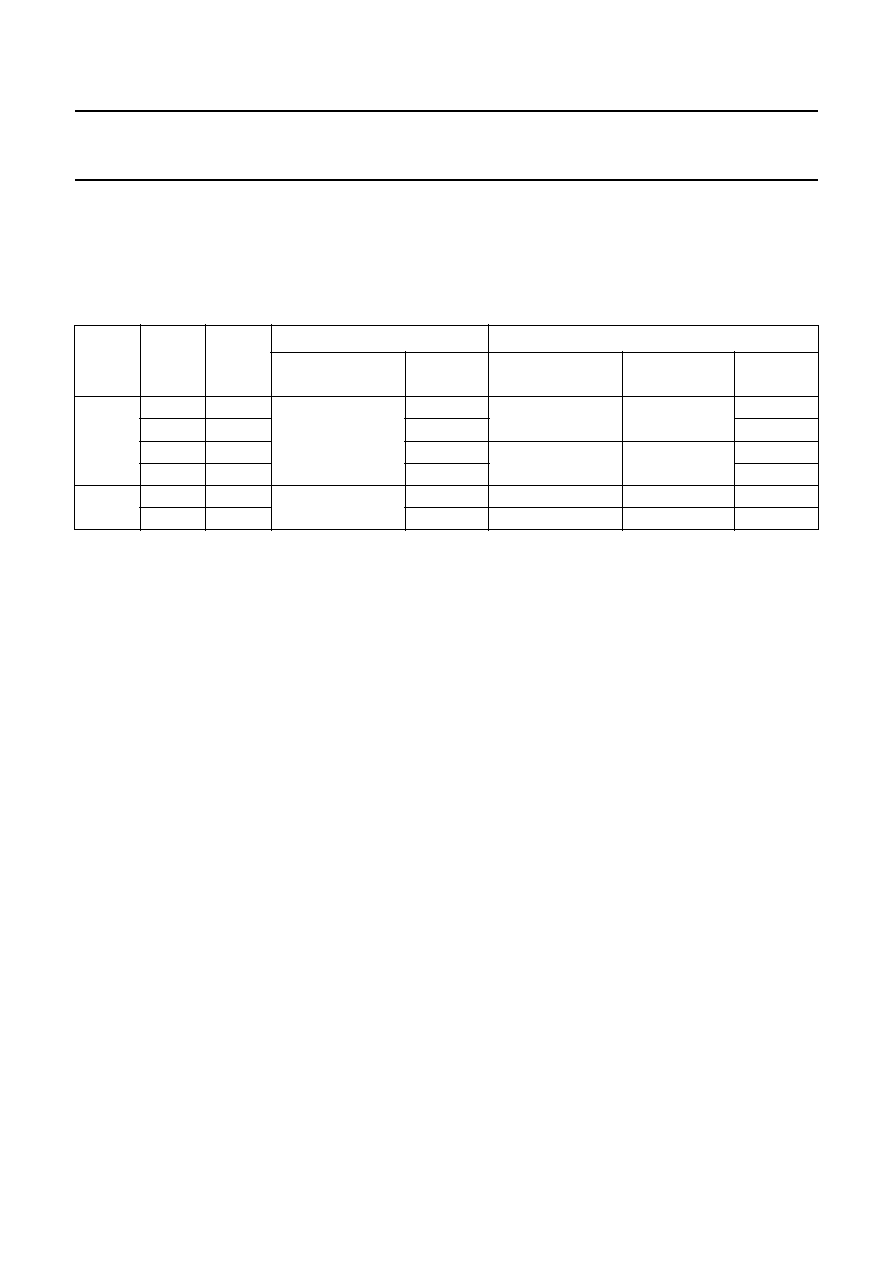
1997 Dec 12
50
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
17.6
RAM buffer for the system and DDC application
The architecture of the RAM buffer is set up in a flexible configuration to use the RAM resource to a maximum. In principle
the RAM buffer can be shared as system or DDC RAM buffer. The relationship among those applications is arranged as
shown in Table 42.
Table 42 Relation between system RAM and DDC RAM
Notes
1. Read/write through MOVX instruction might conflict with the access from DDC1 hardware. So the access from CPU
by using MOVX instruction is forbidden.
2. READ/WRITE through DDCADR and RAMBUF registers has the conflicting problem also. Even the content of
DDCADR, which should be employed by DDC1 hardware, will be damaged. So it is inhibited to use this type of
access.
3. If DDCADR reaches 127 it will automatically wrap around to 0 after the access is done.
4. The access conflict can be avoided because DDC1 access is done by the interrupt service routine. However, the
EDID transferring from the RAM buffer should be finished within 40
µ
s.
5. If DDCADR reaches 255 it will automatically wrap around to 0 after the access is done.
18 I
2
C-BUS INTERFACE
The P83C880 has a software I
2
C-bus interface that can be used in master mode. Full details of the I
2
C-bus are given in
the 80C51 family
"Data Handbook IC20" and/or the document "The I
2
C-bus and how to use it" (ordering number
9398 393 40011).
The I
2
C-bus interface lines SDA and SCL share the same pins as Port 1 lines P1.1 and P1.0 respectively; selection is
done via the S1E bit in SFR DFCON (address C0H).
MODE
EX_DAT SWENB
AUX RAM 0 TO 127
AUX RAM 128 TO 255
NORMALLY
RESERVED FOR
NOTE
NORMALLY
RESERVED FOR
AVAILABLE
FOR
NOTE
DDC1
0
0
DDC1 EDID data
1, 2 and 3
-
system access
2
0
1
3 and 4
-
1
0
1 and 2
DDC1 EDID data
-
1, 2 and 5
1
1
4
4 and 5
DDC2
0
1
DDC2 EDID data
3
-
system access
-
1
1
-
DDC2 EDID data
-
5

1997 Dec 12
51
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19 HARDWARE MODE DETECTION
Due to the many restrictions for mode detection via
software, a hardware mode detector is introduced in the
P83C880. This feature has the following advantages:
∑
Fast enough to react on any mode change.
∑
Possibility to detect the polarity of HSYNC without extra
input pin.
∑
Higher accuracy to measure the HSYNC and VSYNC
frequency
∑
Relieves the CPU and valuable timers/counters in the
microcontroller from lengthy mode detection
∑
In reduced power modes, e.g. Idle mode, the mode
detection is still active.
Apart from the above mentioned benefits, some extra
features can be achieved through hardware mode
detection. The composite sync separation can be done
while mode detection continues. The various formats of
HSYNC and VSYNC output pulses are provided to fit into
different applications.
Since the information of the operational modes defined in
Device Power Management Signalling (DPMS) for
monitors is embedded in HSYNC and VSYNC, the mode
detector is also able to recognize the operational mode
and generate the fixed free running frequency for HSYNC
and VSYNC in some specific modes like stand-by,
suspend and power-off. Two display patterns, the white
and the cross hatch, can be displayed for the self test in
the free running mode.
More on Device Power Management Signalling (DPMS)
will be explained in Chapter 20, "Power management".
19.1
Special Function Register for mode detection
and sync separation
There are 4 SFRs related to mode detection and sync
separation: MDCST (SFR address F8H); HFHIGH (SFR
address FCH); VFHIGH (SFR address FDH) and VFLHFL
(SFR address FEH).
Five SFRs are applied for the output pulse generation of
HSYNC and VSYNC and the display pattern generation for
the self test: HFP (SFR address F6H); HFPOPW (SFR
address F7H); VFP (SFR address F9H); VFPOPW (SFR
address FAH) and PULCNT (SFR address FBH).
These SFRs are described in detail in Section
19.1.1 to 19.1.9.
19.1.1
M
ODE
D
ETECTION
/
SYNC SEPARATION
C
ONTROL AND
S
TATUS
R
EGISTER
(MDCST)
Table 43 Mode Detection/sync separation Control and Status Register (SFR address F8H)
Table 44 Description of MDCST bits
7
6
5
4
3
2
1
0
MARCH
CHREQ
XSEL
HSEL
Hpres
Vpres
Hpol
Vpol
BIT
SYMBOL
DESCRIPTION
7
MARCH
Mode detection enable. If MARCH = 1, mode detection is enabled. If MARCH = 0,
mode detection is disabled. Default value MARCH = 1 to guarantee that mode detection
is automatically executed after power-on reset.
6
CHREQ
Polarity or frequency change. If CHREQ = 1 then the polarity or frequency change
happened. The polarity or frequency is detected after a CHREQ HIGH-to-LOW transition,
because the mode change becomes stable after the CHREQ HIGH-to-LOW transition.
5
XSEL
Indicates if the clock used for the mode detection and the pulse generation is
1
/
2
◊
f
clk
.
If XSEL = 1, the internal clock is
1
/
2
◊
f
clk
. If XSEL = 0 the internal clock is equal to f
clk
.
4
HSEL
Indicates the horizontal sync input coming from HSYNC
in
(pin HSYNC
in
/PROG) or
CSYNC
in
(pin CSYNC
in
/P1.6). If HSEL = 1, CSYNC
in
is the input pin. If HSEL = 0,
HSYNC
in
is the input pin.
3
Hpres
Indicates the presence of HSYNC. If Hpres = 1, HSYNC is present. If Hpres = 0, HSYNC
is not present.

1997 Dec 12
52
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.1.2
H
ORIZONTAL
P
ERIOD
C
OUNTING
H
IGH
-
BYTE
R
EGISTER
(HFHIGH)
Table 45 Horizontal Period Counting High-byte Register (SFR address FCH)
Table 46 Description of HFHIGH bits
19.1.3
V
ERTICAL
P
ERIOD
C
OUNTING
H
IGH
-
BYTE
R
EGISTER
(VFHIGH)
Table 47 Vertical Period Counting High-byte Register (SFR address FDH)
Table 48 Description of VFHIGH bits
19.1.4
V
ERTICAL AND
H
ORIZONTAL
P
ERIOD
C
OUNTING
L
OW
-
NIBBLES
R
EGISTER
(VFLHFL)
Table 49 Register containing the low nibbles of the Horizontal and Vertical Period Counting (SFR address FEH)
Table 50 Description of VFLHFL bits
2
Vpres
Indicates the presence of VSYNC. If Vpres = 1, VSYNC is present. If Vpres = 0, VSYNC
is not present.
1
Hpol
Indicates the polarity of HSYNC. If Hpol = 0, polarity is positive (active HIGH; i.e. HIGH
at horizontal retracing period). If Hpol = 1, polarity is negative (active LOW; i.e. LOW at
horizontal retracing period).
0
Vpol
Indicates the polarity of VSYNC. If Vpol = 0, polarity is positive (active HIGH; i.e. HIGH
at vertical retracing period). If Hpol = 1, polarity is negative (active LOW; i.e. LOW at
vertical retracing period).
7
6
5
4
3
2
1
0
HF.11
HF.10
HF.9
HF.8
HF.7
HF.6
HF.5
HF.4
BIT
SYMBOL
DESCRIPTION
7 to 0
HF.11 to HF.4
Indicate the high byte of the value counted by mode detector for 4
horizontal scanning periods.
7
6
5
4
3
2
1
0
VF.11
VF.10
VF.9
VF.8
VF.7
VF.6
VF.5
VF.4
BIT
SYMBOL
DESCRIPTION
7 to 0
VF.11 to VF.4
Indicate the high byte of the value counted by mode detector for 1
vertical field/frame period.
7
6
5
4
3
2
1
0
VF.3
VF.2
VF.1
VF.0
HF.3
HF.2
HF.1
HF.0
BIT
SYMBOL
DESCRIPTION
7 to 4
VF.3 to VF.0
Indicate the low nibble of the value counted by mode detector for 1 vertical field/frame
period.
3 to 0
HF.3 to HF.0
Indicate the low nibble of the value counted by mode detector for 4 horizontal scanning
periods.
BIT
SYMBOL
DESCRIPTION

1997 Dec 12
53
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.1.5
H
ORIZONTAL FREE RUNNING
F
REQUENCY
/P
ERIOD BYTE
R
EGISTER
(HFP)
Table 51 Horizontal free running Frequency/Period Register byte Register (SFR address F6H)
Table 52 Description of HFP bits
19.1.6
H
ORIZONTAL FREE RUNNING
F
REQUENCY
/P
ERIOD AND
P
ULSE
W
IDTH
R
EGISTER
(HFPOPW)
Table 53 Horizontal free running Frequency/Period and Pulse Width Register (SFR address F7H)
Table 54 Description of HFPOPW bits
19.1.7
V
ERTICAL FREE RUNNING
F
REQUENCY
/P
ERIOD BYTE
R
EGISTER
(VFP)
Table 55 Vertical free running Frequency/Period byte Register (SFR address F9H)
Table 56 Description of VFP bits
7
6
5
4
3
2
1
0
HFP9
HFP8
HFP7
HFP6
HFP5
HFP4
HFP3
HFP2
BIT
SYMBOL
DESCRIPTION
7 to 0
HFP9 to HFP2
Indicate the upper byte of the 10 bits for programming the free running
HSYNC output pulse.
7
6
5
4
3
2
1
0
VSEL
HFP1
HFP0
HOPW4
HOPW3
HOPW2
HOPW1
HOPW0
BIT
SYMBOL
DESCRIPTION
7
VSEL
Indicates whether the internal vertical sync is coming from the external
VSYNC input pin (VSYNC
in
/OE) or separated from the composite signal.
If VSEL = 0, vertical sync coming from the external VSYNC input pin.
If VSEL = 1, vertical sync separated from the composite signal.
6 to 5
HFP1 to HFP0
Indicate the lower two of the 10 bits for programming the free running
horizontal output pulse.
4 to 0
HOPW4 to HOPW0
Indicate the horizontal output pulse width.
7
6
5
4
3
2
1
0
VFP9
VFP8
VFP7
VFP6
VFP5
VFP4
VFP3
VFP2
BIT
SYMBOL
DESCRIPTION
7 to 0
VFP9 to VFP2
Indicate the upper byte of the 10 bits for programming the free running
vertical output pulse.

1997 Dec 12
54
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.1.8
V
ERTICAL FREE RUNNING
F
REQUENCY
/P
ERIOD AND
P
ULSE
W
IDTH
R
EGISTER
(VFPOPW)
Table 57 Vertical free running Frequency/Period and Pulse Width Register (SFR address FAH)
Table 58 Description of VFPOPW bits
19.1.9
P
ULSE GENERATION
C
ONTROL
R
EGISTER
(PULCNT)
Table 59 Pulse generation Control Register (SFR address FBH)
Table 60 Description of PULCNT bits
7
6
5
4
3
2
1
0
-
-
VFP1
VFP0
VOPW3
VOPW2
VOPW1
VOPW0
BIT
SYMBOL
DESCRIPTION
7 to 6
-
Reserved.
5
VFP1
Indicate the lower two bits of the 10 bits for programming the free running
vertical output pulse.
4
VFP0
3 to 0
VOPW3 to VOPW0
Indicate the vertical output pulse width.
7
6
5
4
3
2
1
0
CLMPEN
PATTYP
VPG
PVSI
HPG1
HPG0
FBPO
PHSI
BIT
SYMBOL
DESCRIPTION
7
CLMPEN
Clamping pulse output (CLAMP) enable. If CLMPEN = 1, pin
PWM8/CLAMP/P3.0 is switched to the CLAMP output. If CLMPEN = 0,
the CLAMP function is disabled. The CLAMP function always overrides
other alternative functions such as PWM8 and P3.0.
6
PATTYP
Basic display patterns selection. If PATTYP = 0, the white display
pattern is selected. If PATTYP = 1, the cross hatch display pattern is
selected.
5
VPG
Vertical pulse output modes selection. If VPG = 0, a free running
vertical sync pulse signal is selected. If VPG = 1, a vertical substitution
pulse signal is selected.
4
PVSI
Vertical output pulse polarity selection. If PVSI = 0, the positive
polarity is selected. If PVSI = 1, the negative polarity is selected.
3 to 2
HPG1 to HPG0
Horizontal pulse output modes selection; see Table 61.
1
FBPO
The clamp pulse at the back porch or at the front porch selection.
This bit is only valid when CLMPEN is set HIGH. If FBPO = 1, the
horizontal back porch clamp pulse is selected. If FBPO = 0, the
horizontal front porch clamp pulse is selected.
0
PHSI
Polarity of the horizontal and clamping output pulse indication.
If PHSI = 0, the positive polarity is selected. If PHSI = 1, the negative
polarity is selected.

1997 Dec 12
55
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Table 61 Horizontal pulse output modes
HPG1 HPG0
MODES
0
0
free running horizontal sync pulse signal
0
1
horizontal substitution pulse signal
1
0
reserved
1
1
the incoming horizontal sync is followed and delivered out but the horizontal substitution pulse is
disabled, while the incoming HSYNC is missing

1997 Dec 12
56
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.2
System description
dbook, full pagewidth
MGG036
5
10
12
4
10
12
Hper
Hper
Hper
12
HSYNC_P
Hpol
Hpres
Vper
Vpol
Vpres
Vpol
Hpol
Vper
FBPO
12
Hper
Hper or Hpol
change
Hpol
Hpres
12
Vper
Vper or Vpol
change
Vpol
Vpres
12
12
HFP9 to HFP0
VFP9 to VFP0
10
10
controls
MUX
MUX
MUX
PVSI
PHSI
V-PULSE
GENERATOR
V-MODE
DETECTION
CAPTURE
REGISTERS
H-PULSE
GENERATOR
H-MODE
DETECTION
VPG
HPG1 to HPG0
HFP9 to HFP0
VFP9 to VFP0
HOPW4 to HOPW0
VOPW3 to VOPW0
VSYNC
out
VSYNC
in
f clk
FOSH
FOSV
HSYNC
out
CLAMP
MUX
HSEL
HSYNC
in
CSYNC
in
SYNC
SEPARATION
VSYNC
POLARITY
CORRECTION
MODE DETECT
AND
PULSE GENERATION
CONTROL
HSYNC
POLARITY
CORRECTION
H
V
DIV 2
XSEL
DIV 76
microcontroller core
microcontroller core
CHREQ
(Change Interrupt Request)
Fig.27 Block diagram of the hardware mode detection and pulse generation.

1997 Dec 12
57
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.2.1
C
LOCK PRESCALER
To reach the required 12 bit accuracy and the reasonable
crystal clock frequency, the line time of 4 consecutive lines
is measured (see Section 19.2.5). Doing so the maximum
crystal clock frequency is:
From the calculation above it is clear that there will be no
overflow if f
clk
is 10 or 12 MHz. However, for a 16 or
24 MHz crystal f
clk
has to be divided by a factor of 2 to get
a correct clock frequency FOSH for the horizontal part of
the mode detection. If f
clk
used is 10, 12 or 16 MHz then
FOSH will be respectively 10, 12 or 8 MHz.
The same holds for the vertical part of the mode detection.
Here the minimum vertical sync frequency f
V(min)
= 40 Hz,
so the maximum clock frequency to avoid overflow in a
12-bit counter, equals:
To get a maximum accuracy without overflow the clock of
the horizontal section FOSH, should be prescaled down to
this value of FOSV. Thus the scale factor should be at
least:
Take n = 76 as a suitable scale factor as shown in Fig.23.
Table 62 Clock frequencies
19.2.2
H
ORIZONTAL POLARITY CORRECTION
In order to simplify the processing in the following stages,
the HSYNC polarity correction circuit is able to convert the
input sync signals to positive polarity signals in all
situations. However, be aware that this correction is
achieved by the aid of Hpol and Hper signals. Hpol and
Hper are only settled down in several horizontal scanning
lines (61 lines, if f
HSYNC
goes up) or a few milliseconds
(worst case 1.2 ms, if f
HSYNC
becomes inactive) after
power-on or timing mode change.
f
clk
(MHz)
FOSH
(MHz)
FOSV
(MHz)
10
10
131.6
12
12
157.9
16
8
105.3
f
clk
2
12
f
H(min)
◊
4
------------------------------
15.36 MHz
=
FOSV
2
12
f
V(min)
◊
163.84 kHz
=
n
FOSH
max
(
)
163.84 kHz
-------------------------------
12
10
3
k Hz
◊
163.84 kHz
-----------------------------------
73.2
=
=
19.2.3
V
ERTICAL POLARITY CORRECTION
The purpose of the vertical polarity correction is similar to
the horizontal polarity correction. However, it takes a
longer time to get the correct result after power-on or a
timing mode change because at least 5 frames are needed
to stabilize Vper from the input sync signals.
19.2.4
V
ERTICAL SYNC SEPARATION
This function will separate the vertical sync out of the
composite sync. To do so the change in polarity during
VSYNC interval can be utilized to extract VSYNC as
shown in Fig.28. The differentiated sync pulse derived
from HSYNC_P is used to reset an 8-bit upcounter.
At
1
/
4
of the line time the level of the incoming sync at that
moment is clocked into the last D flip-flop. Be aware that
1
/
4
of the line period equals
1
/
16
of parameter Hper because
Hper is calculated based on 4 consecutive lines.
Due to the fact that the differentiator reacts upon every
LOW-to-HIGH transition even an interlaced composite
sync will be separated correctly. Note further that the sync
separation is taken from signal HSYNC_P which is
processed by the Horizontal Polarity Correction circuit but
not necessary with the fixed polarity. As a result the
polarity of the separated vertical sync Vsep will vary with
the incoming composite signal, and in case no composite
sync is present the level will be LOW. According to this
algorithm, Vsep will be always
1
/
4
HSYNC period shift to the
original VSYNC window. The 8-bit counter in Fig.28 is
stopped at its maximum of FFH, otherwise it will start again
from zero which results in a wrong enable pulse for the
D flip-flop.
All kinds of composite sync input shown in Chapter 27 can
be dealt with by this function. There are 6 types of
composite sync waveforms which can be accepted by the
sync processor (see Fig.39).
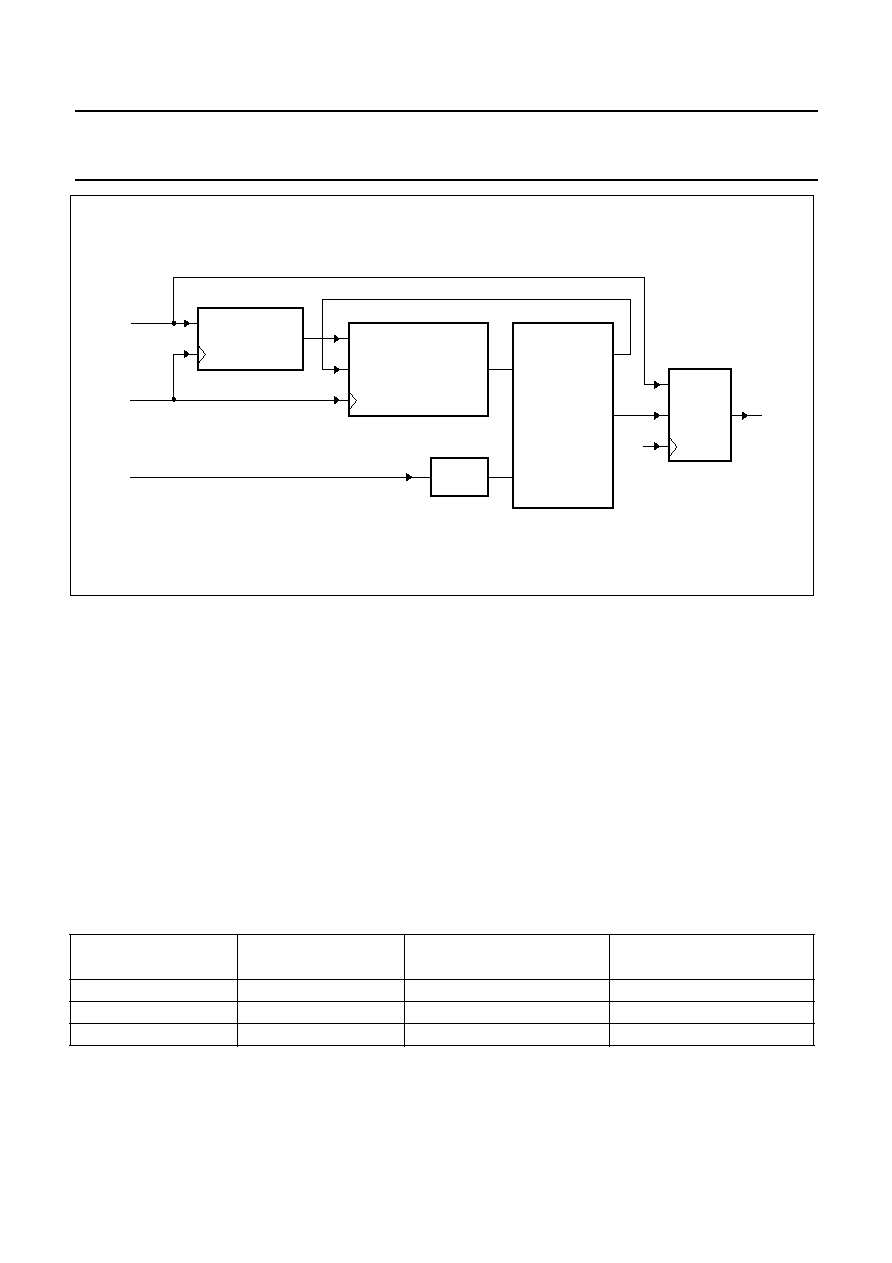
1997 Dec 12
58
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.2.5
H
ORIZONTAL MODE DETECTION
This function block determines the following 4 parameters: Hper, Hpol, Hpres and Hcha. The functional block diagram is
shown in Fig.29.
The 12-bit counter for the determination of the horizontal period has a synchronous reset and will be reset by the
prescaled and differentiated horizontal pulse HSYNC_P, coming from the horizontal prescaler, or in case the counter
reaches the value FF0H as defined by the comparator. The latter situation will occur if no sync pulses are coming in or
if the frequency of the incoming sync pulses is too low.
The 12-bit register, that will store the 4 line time period, is only enabled if the signal HENA is HIGH.
19.2.5.1
Parameter Hper
Based on this configuration, the resulting accuracy for Hper will be:
Accuracy in H
Table 63 Accuracies
XTAL (f
clk
)
(MHz)
FOSH
(MHz)
ACCURACY IN H AT 30KHZ
(%)
ACCURACY IN V AT 50HZ
(%)
10
10
0.075
0.038
12
12
0.063
0.032
16
8
0.094
0.048
Fig.28 Vertical sync separator.
handbook, full pagewidth
MGG037
8-BIT
COUNTER
E
R
Q7 to Q0
DIFFERENTIATOR
D-FF
D
E
Q
COMPARATOR
FOR
SYNC
SEPARATION
DIV 16
Vsep
HSYNC_P
FOSH
Hper
100%
(horizontal counter value)
-------------------------------------------------------------------
=
100%
f
H
◊
4
FOSH
◊
--------------------------
=

1997 Dec 12
59
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
A 12-bit counter is used to measure the frequency of
HSYNC. Every 4 HSYNC periods are measured and
compared with the previous locked HSYNC frequency; the
counter is reset every 4 HSYNC periods. The base clock
to the counter is
for a 12 MHz system
clock. If the new HSYNC frequency is larger than the
previous HSYNC frequency, there is a 4-bit counter to
avoid the noise or the temporary frequency shift.
When the 4-bit counter counts up to 15 for the comparison
Hfreq
(new)
> Hfreq
(previous)
, then the mode change interrupt
is issued. The time from mode change to interrupt issued
is approximately 4
◊
Hperiod
(new)
◊
15 or
(4
◊
Hperiod
(new)
◊
14) + n
◊
Hperiod
(previous)
),
where n = 1, 2 or 3.
If the new HSYNC frequency is not in the static state and
is smaller than the previous HSYNC frequency, the time
from mode change to interrupt issued is approximately
(4
◊
Hperiod
(new)
◊
3)
-
(n
◊
Hperiod
(previous)
), where
n = 1, 2, 3 or 4. The static state is considered as the state
where the 12-bit counter, for measuring the HSYNC
frequency, reaches 4080.
For a 12 MHz system clock, the static state is equal to
.
If the input HSYNC frequency is less than 11.8 kHz, it will
be regarded as static state. A 2-bit counter is used to avoid
the noise or the temporary shift.
When the 2-bit counter counts up to 3 for the comparison
`static state' < Hfreq
(new)
< Hfreq
(previous)
, then the mode
change interrupt is issued.
1
12 MHz
-------------------
83 ns
=
1
83 ns
4080
4
-------------
◊
---------------------------------
1
84660 ns
-----------------------
11.8 kHz
=
=
When the new input HSYNC is changed to a static state,
the HSYNC frequency counter reaches 4080. In order to
have a faster response of the mode change interrupt, the
2-bit counter is not used and the mode change interrupt is
issued immediately. The time from mode change to
interrupt issued is approximately
((4080 + 5)
◊
83 ns)
-
(n
◊
Hperiod
(previous)
), where
n = 1, 2, 3 or 4.
19.2.5.2
Parameter Hpres
The presence indicator Hpres, as stored in the SR flip-flop,
contains some hysteresis, as required due to the two
threshold settings in the comparator. The SR flip-flop will
be set, indicating that no active sync (or sync with a too low
frequency) is coming in if the counter reaches a value of
FF0H (4080 decimal). The corresponding horizontal sync
frequency is:
The SR flip-flop will be reset, indicating that an active sync
is present, if the counter reaches a value lower than FC0H
(4032 decimal). The corresponding horizontal sync
frequency is:
The hysteresis result,
,
is shown in Table 64.
f
H
Hfreq1
4
FOSH
◊
Counter value
(
)
--------------------------------------------
4
FOSH
◊
4080
---------------------------
=
=
=
f
H
Hfreq2
4
FOSH
◊
Counter value
(
)
--------------------------------------------
4
FOSH
◊
4032
---------------------------
=
=
=
Hysteresis
Hfreq1
Hfreq2
≠
(
)
Hfreq1
/
=
Table 64 Hysteresis in the Hpres detection
XTAL (f
clk
)
(MHz)
FOSH
(MHz)
Hfreq1
(MHz)
Hfreq2
(MHz)
HYSTERESIS
(%)
10
10
9.804
9.921
1.2
12
12
11.765
11.905
1.2
16
8
7.843
7.937
1.2
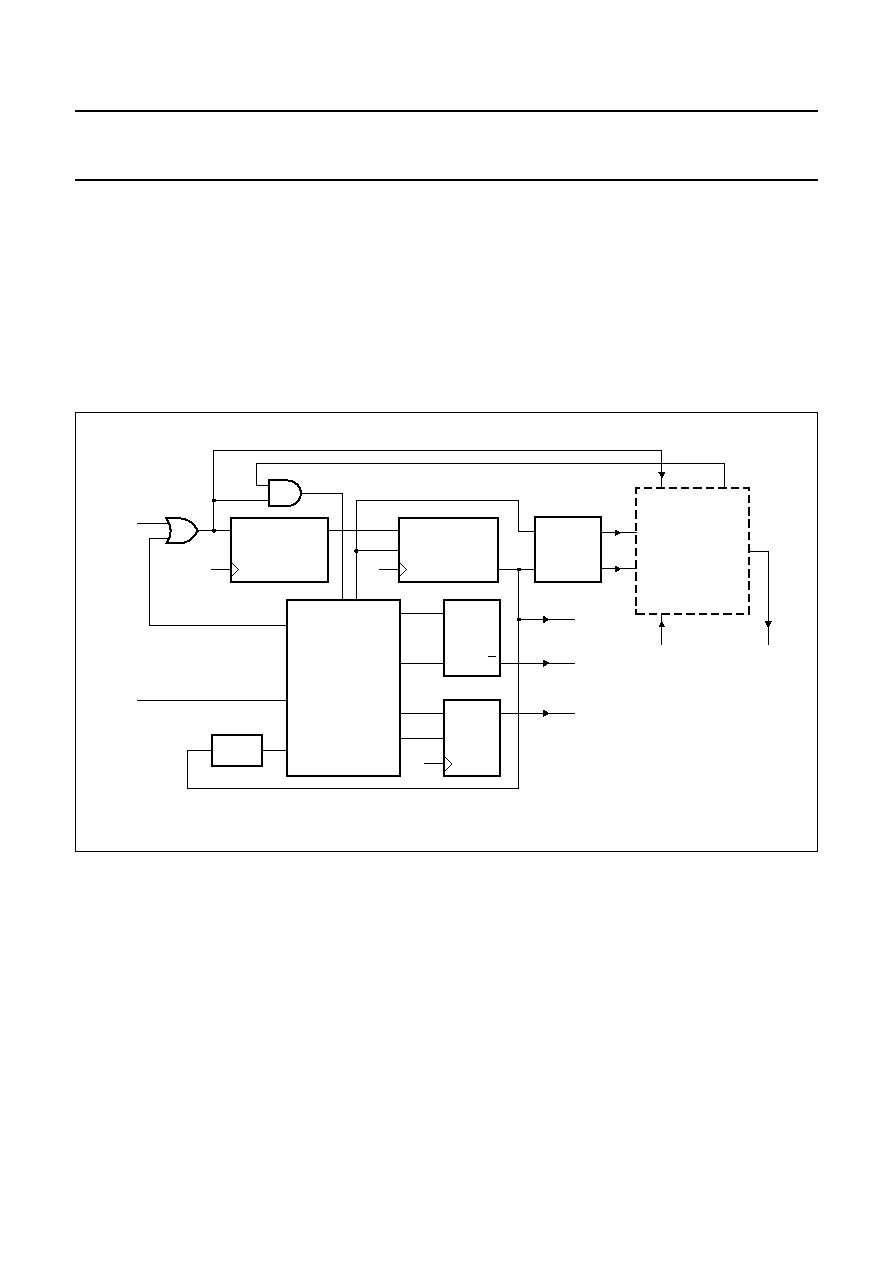
1997 Dec 12
60
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.2.5.3
Parameter Hpol
The mode change interrupt will be issued after 36 to 40
periods of the HSYNC when the polarity is changed from
negative to positive. The polarity indicator Hpol will be
changed from a logic 1 to a logic 0. The mode change
interrupt will be issued after the 60 periods of the HSYNC
when the polarity is changed from positive to negative. The
Hpol will be changed from a logic 0 to a logic 1. A logic 0
represents a positive polarity and a logic 1 represents a
negative polarity.
19.2.5.4
Parameter Hcha
If Hcha is set to HIGH indicating that the period time has
changed for a long period, the Hper and Hpres will be
updated. If the measured period time has become stable
then the two counters will start to count down and the
HENA signal is set to LOW again, thereby disabling the
register Hper and the SR flip-flop for Hpres parameter.
Fig.29 Horizontal mode detection.
handbook, full pagewidth
MGG038
D-FF
SR-FF
D
E
Q
Q
Hper and Hpol
DECISION
CIRCUIT
DIV 16
Hpol
FOSH
FOSH
HENA
Hcnt
Hcha
FOSH
HSYNC
HSYNC_P
Hres
S
R
Hpres
Hper
Q
Hhgh
Hlow
12-BIT
COUNTER
R
Q 11 to Q0
FOSH
12-BIT
REGISTER
Hper
CHANGE
DETECTOR
MODE
CHANGE
STABILIZATION
AND
COMPARISON
CIRCUIT
D11 to D0
E
Q11 to Q0

1997 Dec 12
61
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.2.6
V
ERTICAL MODE DETECTION
To detect the vertical mode parameters Vper, Vpol and
Vpres, a circuit can be used which is almost similar to that
for the horizontal mode detection. The only difference is
that now the period time of one frame (instead of 4 lines)
is measured. The presence indication for the vertical sync
also contains a hysteresis of about 1.2%.
The formula to calculate the hysteresis is also similar to the
condition of HSYNC processing. A 12-bit counter is used
to count the clock number during one frame. Again FF0H
(4080 decimal) and FC0H (4032 decimal) are taken as the
threshold for Vfreq1 and Vfreq2 respectively, but the clock
FOSV = FOSH/76. Vfreq1, Vfreq2 and Hysteresis are
calculated as follows:
f
V
Vfreq1
FOSV
Counter value
(
)
--------------------------------------------
FOSH
76
4080
◊
--------------------------
=
=
=
f
V
Vfreq2
FOSV
Counter value
(
)
--------------------------------------------
FOSH
76
4032
◊
--------------------------
=
=
=
The hysteresis result,
,
is shown in Table 64.
If the new VSYNC frequency is larger than the previous
VSYNC frequency, the time from mode change to interrupt
issued is approximately from
((Vperiod
(new)
◊
2) + Vperiod
(previous)
) to (Vperiod
(new)
◊
3).
If the new VSYNC frequency is not in the static state and
is smaller than the previous VSYNC frequency, the time
from mode change to interrupt issued is approximately
from Vperiod
(new)
to Vperiod
(new)
◊
2. If the new VSYNC
frequency is in the static state, the time from mode change
to interrupt issued is approximately from
(4080
◊
6.3 us)
-
Vperiod
(previous)
to 4080
◊
6.3
µ
s.
Hysteresis
Vfreq1
Hfreq2
≠
(
)
Hfreq1
/
=
Table 65 Hysteresis in the Vpres detection
(f
clk
)
(MHz)
FOSH
(MHz)
Vfreq1
(MHz)
Vfreq2
(MHz)
HYSTERESIS
(%)
10
10
32.25
32.63
1.2
12
12
38.70
39.16
1.2
16
8
25.80
26.11
1.2
The polarity can be measured by looking to the level of the
input sync at
1
/
4
of the frame time. The mode change in
vertical the frame period will be detected if there is a
change for a longer time than 3 frame periods.
The accuracy of Vper can calculated by the following
formula:
The hysteresis results and the accuracy of Vper are shown
in Table 63.
19.2.7
H
ORIZONTAL PULSE GENERATOR
Through the control flags, HPG1 and HPG0, the horizontal
pulse generator is able to generate the HSYNC
out
signal
with the following formats:
1. The same pulse as the input horizontal sync, or a
substitution pulse (with a fixed length) in case of a
missing sync pulse.
Accuracy in V
100%
(vertical counter value)
------------------------------------------------------------
100%
f
V
◊
FOSV
(
)
--------------------------
100%
76
◊
f
V
◊
FOSH
(
)
---------------------------------------
=
=
=
2. A pulse starting at the beginning of the input horizontal
sync but now with a fixed length, or a substitution pulse
(with fixed length).
3. A free running sync pulse.
4. The same pulse as the input horizontal sync. The
substitution pulse is inhibited even if HSYNC is
missing.
To be able to generate a substitution pulse the down
counter, depicted in Fig.23, is loaded at each incoming
sync with a period time just a bit longer than the measured
Hper. If now normal syncs are present then the counter will
be loaded just before it reaches 000H. Therefore the
counter will not generate a pulse (in Fig.23, HPST remains
LOW). However, if a sync pulse is missing the counter will
reach 000H and generates a substitution pulse, HPST. At
the same time it will load itself again for the next run. To
generate free running pulses the only thing to do is to load
the down counter with the parameter HFP and to stop the
load pulses coming from the input sync, HSYNC_P. So,
the signal HPST is either a free running pulse or a pulse in
case an input sync is missing.

1997 Dec 12
62
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
The 5-bit down counter is used to generate a pulse with
pulse width t
W(H)
. As shown in Fig.23, the SR flip-flop will
be set by either HPST (free running/missing sync pulse) or
by the leading or trailing edge of the incoming sync pulse,
HSYNC_P. In the same way the SR flip-flop will be reset
by either the end of the incoming sync pulse or by the
pulse width counter.
If necessary (HPG1, HPG0: 1, 1), the substitution pulse
can be suppressed and only the incoming HSYNC pulse
will be delivered out. The frequency of the free running
pulse is:
The pulse width of the free running mode is:
t
W(H)
= T
FOSH
◊
(HOPW<4:0>)
f
H(free)
FOSH
Hfp
----------------
=
Fig.30 Horizontal pulse generator.
handbook, full pagewidth
MGG039
Q
HSYNC_P
HFP
Hper
HPG1 to HPG0
S
SR-FF
R
Q
HOPW
FOSH
DATA
LOAD
DECISION
PULSE
RISE/FALL
GENERATOR
PULSE
WIDTH
GENERATOR
FOSH
PHSI
DOWN
COUNTER
COMPARATOR
D9..0
HPST
HSYNCout
L
Q9..0
'0'
19.2.8
V
ERTICAL PULSE GENERATOR
The clock used in this vertical pulse generator must be
switchable between FOSV (needed to generate missing
sync pulses) and HPST (free running syncs from the
horizontal pulse generator) needed in the free running
mode. In the latter situation one vertical sync pulse (i.e.
one frame) will be generated by including an integer
number of the horizontal scanning lines (i.e. HPST). In this
case, the pulse width is also counted by HPST. The rest is
more or less equal to the horizontal pulse generator.
The frequency of the free running pulse is:
The pulse width of the free running mode is:
t
W(V)
= T
H(free)
◊
[(VOPW<3:0>) + 2]
◊
2
f
V(free)
f
H(free)
2
Vfp
◊
------------------
=
19.2.9
C
APTURE REGISTERS
This function captures the 6 parameters, Hper, Hpol,
Hpres, Vper, Vpol and Vpres such that the current value of
these parameters is available for the microcontroller core
(software) at all times. The mode change interrupt will be
activated if:
∑
The horizontal period changes
∑
The vertical period changes
∑
The horizontal polarity changes
∑
The vertical polarity changes.
19.2.10 C
ONTROL
All necessary control signals for the complete hardware
mode detection are mentioned in Section 19.1.

1997 Dec 12
63
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.2.11 T
HE
D
ISPLAY
P
ATTERN
G
ENERATION
For certain events such as disconnection with the host or
the life test of monitor sets, it is convenient to have certain
display patterns shown on the monitor as the indication of
the operation of the monitor. The P83C880 provides two
simple patterns, the white pattern and the cross hatch
pattern for this purpose in the free running mode.
In the free running mode, the intervals of HSYNC and
VSYNC are determined by the 10-bit registers, HFP and
VFP. Based on the HFP and VFP, the internal down
counter will determine the starting or ending of the HSYNC
and VSYNC. The starting position, ending position and the
duration of the adjacent hatch lines are all related to the
programmed value of HFP and VFP. As a matter of fact,
the starting and ending position of the white pattern are
decided by the fixed number of FOSH clock and FOSV
clock (see Fig.31). Therefore, the position or dimension of
the white pattern is much related to HFP and VFP. The
duration of every two hatch lines (accordingly, the number
of hatch lines in the horizontal or vertical direction) will
depend on two fixed numbers (32, 32) which divide HFP
and VFP. For both white and cross hatch patterns, the
displayed pattern might look different in the different timing
modes and the symmetric display is not guaranteed.
However, they should be sufficient to be used as the
indicator to report the status of the monitor. Figure 31
demonstrates the display of the two patterns.
Two flags: PATENA (SFR PWME2) and PATTYP (SFR
PULCNT), are used to control the pattern display; for
detailed usage of those control bits refer to Section 7.3.6
and Section 19.1.9.
Fig.31 Two self test display patterns.
handbook, full pagewidth
MGG040
32
HPST
32
HPST
16
HPST
32 FOSH
16 FOSH
32 FOSH
32 FOSH
2. THE CROSS HATCH
1. THE WHITE PATTERN
16 FOSH
19.2.12 CLAMP
OUTPUT
To facilitate the video processing in the following stage, the
clamping pulse can be delivered on pin
PWM8/CLAMP/P3.0 by setting flag CLMPEN (PULCNT.7)
to HIGH. The clamping pulse always accompanies the
HSYNC
out
pulse. Therefore, even in the free running mode
the clamping pulse is still present as long as the CLMPEN
bit is set. Flag FBPO (PULCNT.1) can be used to choose
the front porch clamp pulse (FBPO = 0) or the back porch
clamp pulse (FBPO = 1). The pulse width of the clamping
output signal is fixed to 8 FOSH clocks.
The bit PHSI (PULCNT.0) is used to set the output polarity
of HSYNC
out
and the clamping pulse. If PHSI is LOW then
the output polarity will be positive, otherwise the output
polarity is negative.

1997 Dec 12
64
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
19.3
System operation
After a successful power-on reset, the P83C880 will
automatically start the mode detection and sync
separation by default. The output pulses of HSYNC and
VSYNC are delivered in the free running format by the
default setting. Since it takes at least 5 frames to finalize
the calculation of the HSYNC period, Hper, VSYNC period
and Vper, it is better to wait until the stable state is reached
to get the complete information after power-on reset.
Accordingly, Hpol, Vpol, Hpres, Vpres and sync separation
will be decided upon after Hper and Vper are settled. To
prevent interfering the CPU too often, the interrupt request
flag IE0 (SFR TCON) is only set if the mode (including
frequency or polarity) is changed. IE0 will be cleared either
by the CPU when the service routine is called (IT0 = 1) or
by the service routine itself (IT0 = 0).
If it is required to reduce power dissipation or if it is
preferred to stabilize the entire system after power-on
reset before mode detection is proceeded, the bit MARCH
(SFR MDCST) can be cleared to logic 0. Mode detection
can be activated at the desired moment later on by setting
MARCH to a logic 1.
In fact, the detection of the Device Power Management
Signalling (DPMS) modes like `Normal', `Standby',
`Suspend', `Power off', etc. and sync separation are mixed
together with the display mode detection.
The mode detection function provides the hardware
vehicle to facilitate the mode detection and related
activities. Nevertheless, to use this facility to a maximum,
the proper interaction between software and hardware is
still essential. When VSYNC is absent and HSYNC is
present, the polarity of HSYNC is always fixed. A software
flow chart example is illustrated in Fig.32.
19.3.1
D
ISPLAY
P
OWER
M
ANAGEMENT
S
IGNALLING
(DPMS)
SPECIFICATION
According to the DPMS specification: Hfreq <10 kHz and
Vfreq <10 Hz indicates that HSYNC and VSYNC are
inactive. However, in the real application, there are no
modes running with 10 kHz
Hfreq
15 kHz and
10 Hz
Vfreq
40 Hz. Therefore, Hfreq = 15 kHz and
Vfreq = 40 Hz are chosen as the threshold to indicate an
active or inactive signal for HSYNC and VSYNC
respectively.

1997 Dec 12
65
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.32 Software procedure in system operation: Mode detection flow chart.
handbook, full pagewidth
MGG041
IF CSYNC IN?
(CHECK HSEL)
SET HSEL = 0
SET VSEL = 0
IS Vpres = 1?
IS Hpres = 1?
NO
YES
SET HSEL = 1
SET VSEL = 1
CHANGE VSEL = 1
CHANGE VSEL = 0
NO
YES
NO
YES
IS VSEL = 1?
IS Vpres = 1?
YES
NO
NO
YES
INTERRUPT OCCURS
IE0 IS SET
RETURN

1997 Dec 12
66
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
20 POWER MANAGEMENT
The P83C880 supports power management. The
hardware mode detection complies to the Device Power
Management Signalling (DPMS) according to the
specification of VESA. The microcontroller is able to
distinguish between `Normal', `Standby', `Suspend' and
`Power off' mode by detecting the frequency of HSYNC
and VSYNC. HSYNC is an active signal if its frequency is
above 15 kHz; otherwise, it is inactive. For VSYNC 40 Hz
is the threshold to judge if it is active or inactive. See also
Section 19.3.1. The exact values for the threshold depend
on the chosen crystal oscillator frequency:
10, 12 or 16 MHz.
The information about the status of HSYNC and VSYNC
can be represented by the bits, Hpres and Vpres in SFR
MDCST (address F8H).
The combination of Hpres and Vpres in relation to the
operating mode is shown in Table 66.
In the case of DDC2AB protocol, apart from hardware
mode detection, the protocol of ACCESS.bus also
supports Device Power Management Signalling (DPMS)
commands. In some operating modes the microcontroller
might enter a kind of power saving mode, i.e. Idle or
Power-down mode. In this situation the extremely low
retention voltage of 1.8 V for internal memory can support
the microcontroller to save its state before switching to Idle
or Power-down mode.
One set of I/O ports with the capability to drive LEDs can
help to highlight the current operating mode of monitors. It
is also possible to control the power consumption sources
like heater, main supply etc., through an I/O port in a
related operating mode.
Table 66 Display Power Management modes
OPERATING MODES
HSYNC
Hpres
VSYNC
Vpres
Normal
active
1
active
1
Standby
inactive
0
active
1
Suspend
active
1
inactive
0
Power off
inactive
0
inactive
0
21 CONTROL MODES
The microcontroller can operate in different control modes
(e.g. for emulation or OTP programming) by means of a
10-bit serial code that is shifted into the RESET input. The
signal at the XTAL1 pin serves as the shift clock.
The code is built up as follows: 0 XXXXX 0101; whereby
the first `0' is the start bit, followed by a 5-bit code and
completed by `0101'. The 5-bit code determines the mode.
Normal mode is reached when no code is shifted in, but
the RESET pin remains HIGH for at least 10 cycles of the
XTAL1 input plus 20
µ
s.
When an OTP Programming/Verification, Emulation or a
Test mode should be entered, the timing must be as
shown in Fig.34.
The RESET signal is sampled on the rising edge of
XTAL1. Set-up and hold times for the RESET signal with
respect to the XTAL1 rising edge are 10 ns each.
The procedure to enter a specific control mode is as
follows:
1. Reset the microcontroller (CPU) by keeping the
RESET signal HIGH for at least 10 XTAL1 clock cycles
to escape any other control mode, plus at least 20
µ
s
(minimum of 24 internal clock cycles) to reset the
internal logic.
2. Shift in the specific code for the required control mode
(e.g. 0 11000 0101 for Emulation mode) via the
RESET pin and the XTAL1 clock (MSB first).
3. After the 10th bit the RESET signal should go LOW
within 9 cycles of XTAL1, otherwise the
microcontroller will enter Normal mode.
For the OTP Programming/Verification control modes see
Chapter 22.

1997 Dec 12
67
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
22 ONE TIME PROGRAMMABLE (OTP) VERSION
The OTP version P87C380 contains:
∑
32 kbytes ROM
∑
512 bytes RAM.
Next to the 32 kbytes ROM, another extra 384 bytes are
available. These bytes can be used for identification
purposes or to indicate the version number, etc. These
bytes are addressed via address lines A0 to A4.
Access to the OTP for program execution is done in
Normal mode. For writing and reading (Verification) of the
program memory and of the extra 384 bytes, different
control modes are used as shown in Table 67.
The signals and waveforms are given in Table 69 and
Fig.33. Pin connections to be used during Programming
and Verification are given in Table 68.
Table 67 Code for Programming/Verification of the
OTP version P87C180A
MEMORY
CODE
ROM: 32 kbytes (program memory)
010000 0101
Extra 384 bytes (memory)
010001 0101
ROM: 32 kbytes (verification)
011111 0101
Table 68 Pin assignments during
Programming/Verification mode
PIN
CONNECT TO
1
V
SS
2
V
SS
3
A13
4
A12
5
A11
6
A10
7
A9
8
A8
9
XTAL1 (note 1)
10
XTAL2 (note 1)
11
V
DD
12
V
SS
13
WE
14
DI5/DO5
15
DI6/DO6
16
OE
17
DI4/DO4
18
A7
19
A6
20
A5
21
A4
22
A3
Note
1. For driving the oscillator pins see Fig.10c.
23
A2
24
A1
25
A0
26
RESET
27
V
SS
28
V
SS
29
V
SS
30
V
SS
31
V
SS
32
V
DD
33
V
SS
34
A14
35
V
PP
36
DI3/DO3
37
DI2/DO2
38
DI1/DO1
39
DI0/DO0
40
DI7/DO7
41
V
SS
42
V
SS
PIN
CONNECT TO

1997 Dec 12
68
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Table 69 Timing table for programming; see Fig.33
SYMBOL
PARAMETER
MIN.
TYP.
MAX.
UNIT
t
su(AW)
address set-up time write
2
-
-
µ
s
t
h(AW)
address hold time write
10
-
-
µ
s
t
su(AR)
address set-up time read
10
-
-
ns
t
h(AR)
address hold time read
200
-
-
ns
t
su(D)
data set-up time
2
-
-
µ
s
t
h(D)
data hold time
20
-
-
µ
s
t
su(prog)
programming voltage set-up time
10
-
-
µ
s
t
h(prog)
programming voltage hold time
10
-
-
µ
s
t
W(prog)
programming pulse width
90
-
-
µ
s
t
W(R)
read pulse width
300
-
-
ns
t
ACC(OE)
output enable access verify
92
122
183
ns
t
DZ(OE)
data float after OE
10
-
-
ns
Fig.33 Programming waveforms.
handbook, full pagewidth
MGG051
DATA OUT VALID
DATA IN VALID
ADDRESS VALID
High Z
VIH
VIL
VPP
VPP
VIL
VIH
VIL
VIH
VIL
VIH
VIL
VIH
VIL
WE
address
A0 to A13
data out
DO0 to DO7
data in
DI0 to DI7
OE
tsu(AW)
10
µ
s
10
µ
s
th(AW)
tsu(AR)
th(AR)
tsu(D)
th(D)
tsu(prog)
th(prog)
tDZ(OE)
tACC(OE)
tW(R)

1997 Dec 12
69
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
23 LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 134).
24 HANDLING
Inputs and outputs are protected against electrostatic discharge in normal handling. However, to be totally safe, it is
desirable to take normal precautions appropriate to handling MOS devices (see
"Handling MOS devices" ).
SYMBOL
PARAMETER
MIN.
MAX.
UNIT
V
DD
supply voltage
4.4
5.5
V
V
I
input voltage (all inputs)
-
0.5
V
DD
+ 0.5 V
I
source(max)
total maximum source current for all port lines
0.50
0.67
mA
I
sink(max)
total maximum sink current for all port lines
155
165
mA
P
tot
total power dissipation
88.4
170
mW
T
stg
storage temperature
-
60
+150
∞
C
T
amb
operating ambient temperature (for all devices)
-
25
+85
∞
C
Fig.34 Timing for OTP Programming/Verification.
handbook, full pagewidth
RESET
93 XTAL1
CODE
5 XTAL1
4 XTAL1 4 XTAL1
8 XTAL1
4 XTAL1
x x x x x
0
0 1 0
1
XTAL1
MBK517
1997 Dec 12
70
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
25 DC CHARACTERISTICS
V
DD
= 4.5 to 5.5 V; V
SS
= 0 V; T
amb
=
-
25 to +85
∞
C; all voltages with respect to V
SS
unless otherwise specified.
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT
Supply
V
DD
operating supply voltage
4.4
5
5.5
V
I
DD
operating supply current
f
clk
= 12 MHz
20.1
29.4
30.9
mA
f
clk
= 16 MHz
25.2
36.1
38.4
mA
V
POR
Power-on-reset voltage level
3.6
3.9
4.2
V
P
ROGRAMMING SUPPLY
V
DD(P)
supply voltage programming mode
4.4
5.0
5.5
V
V
PP
programming voltage
12.0
12.75 13.0
V
I
DD(P)
supply current programming mode
10.6
19.1
24.0
mA
I
PP
programming current
77.8
80.1
81.3
mA
RESET
R
I(RESET)
input resistance RESET
V
DD
= 4.5 V to 5.5 V
20
60
180
k
I
LI
input leakage current
V
SS
< V
I
< V
DD
±
10
µ
A
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.3V
DD
V
V
IH
HIGH-level input voltage
0.7V
DD
-
V
DD
+ 0.5
V
HSYNC
in
/PROG and VSYNC
in
/OE
I
IL
Input leakage current
V
SS
< V
I
< V
DD
-
10
µ
A
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.8
V
V
IH
HIGH-level input voltage
2.0
-
V
DD
+ 0.5
V
CSYNC
in
/P1.6
I
LI
input leakage current
V
SS
< V
I
< V
DD
-
10
µ
A
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.8
V
V
IH
HIGH-level input voltage
2.0
-
V
DD
+ 0.5
V
I
OL
LOW-level output sink current
V
O
0.4 V
1.6
-
-
mA
V
O
1.0 V
10
-
-
mA
I
OH
HIGH-level pull-up output source
current
strong pull-up during 2 clock
cycles
V
O
= V
DD
-
0.4 V
1.6
-
-
mA
weak pull-up
V
O
= V
DD
-
0.4 V
25
-
-
µ
A
Port 0
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.3V
DD
V
V
IH
HIGH-level input voltage
0.7V
DD
-
V
DD
+ 0.5
V
I
LI
input leakage current
V
I
= 0.4V
DD
; V
DD
= 5 V
-
10
-
-
100
µ
A
I
IT
input transition current
V
I
= 0.5V
DD
; V
DD
= 5 V
-
-
-
1000
µ
A
I
OL
LOW-level output sink current
V
O
0.4 V
1.6
-
-
mA
V
O
1.0 V
10
-
-
mA

1997 Dec 12
71
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
I
OH
HIGH-level pull-up output source
current
strong pull-up during 2 clock
cycles
V
O
= V
DD
-
0.4 V
1.6
-
-
mA
weak pull-up
V
O
= V
DD
-
0.4 V
25
-
-
µ
A
Port 1: SCL/P1.0, SDA/P1.1, SCL1/P1.2 and SDA1/P1.3
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.3V
DD
V
V
IH
HIGH-level input voltage
0.7V
DD
-
V
DD
+ 0.5
V
I
LI
input leakage current
V
I
= 0.4V
DD
; V
DD
= 5 V
-
10
-
-
100
µ
A
I
IT
input transition current
V
I
= 0.5V
DD
; V
DD
= 5 V
-
-
-
1000
µ
A
I
OL
LOW-level output sink current
V
O
=
0.4 V; V
DD
= 5V
3.0
-
-
mA
I
OH
HIGH-level pull-up output source
current
strong pull-up during 2 clock
cycles
V
O
= V
DD
-
0.4 V
1.6
-
-
mA
weak pull-up
V
O
= V
DD
-
0.4 V
25
-
-
µ
A
Port 1 and 3: VSYNC
out
/P1.4, HSYNC
out
/P1.5, PWM10/P1.7 and ADC0/P3.2 to ADC1/P3.3
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.3V
DD
V
V
IH
HIGH-level input voltage
0.7V
DD
-
V
DD
+ 0.5
V
I
LI
input leakage current
V
I
= 0.4V
DD
; V
DD
= 5 V
-
10
-
-
100
µ
A
I
IT
input transition current
V
I
= 0.5V
DD
; V
DD
= 5 V
-
-
-
1000
µ
A
I
OL
LOW-level output sink current
V
O
0.4 V
1.6
-
-
mA
I
OH
HIGH-level pull-up output source
current
strong pull-up during 2 clock
cycles
V
O
= V
DD
-
0.4 V
1.6
-
-
mA
weak pull-up
V
O
= V
DD
-
0.4 V
25
-
-
µ
A
Port 2 and 3: P2.0/PWM0 to P2.7/PWM7 and Port P3.0/PWM8/CLAMP to P3.1/PWM9/PATOUT
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.3V
DD
V
V
IH
HIGH-level input voltage
0.7V
DD
-
V
DD
+ 0.5
V
I
LI
input leakage current
V
I
= 0.4V
DD
; V
DD
= 5 V
-
10
-
-
100
µ
A
I
IT
input transition current
V
I
= 0.5V
DD
; V
DD
= 5 V
-
-
-
1000
µ
A
I
OL
LOW-level output sink current
V
O
0.4 V
1.6
-
-
mA
I
OH
HIGH-level pull-up output source
current
strong pull-up during 2 clock
cycles
V
O
= V
DD
-
0.4 V
1.6
-
-
mA
weak pull-up
V
O
= V
DD
-
0.4 V
25
-
-
µ
A
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT

1997 Dec 12
72
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Note
1. This maximum applies at all times, including during power switching, and must be accounted for in power supply
design. During a power-on process, the +12 V source used for external pull-up resistors should not precede the V
DD
of the P83C880, P83C180, P83C280 and P83C380 up their respective voltage ramps by more than this margin, nor,
during a power-down process, should V
DD
precede +12 V down their respective voltage ramps by more than this
margin
.
26 DIGITAL-TO-ANALOG CONVERTER CHARACTERISTICS
V
DD
= 5 V; V
DDA
= 5 V; T
amb
= 27
∞
C.
Note
1. The `negative' value denotes that the current is sourcing out from the chip into the load device through the output pin.
INT1/V
PP
V
IL
LOW-level input voltage
V
SS
-
0.5
-
0.2V
DD
-
0.1 V
V
IH
HIGH-level input voltage
I
IH
= 2 mA
0.2V
DD
+ 0.9
-
12.6
V
V
IH
-
V
DD
input voltage with respect to V
DD
-
-
8
V
SYMBOL
PARAMETER
TEST CONDITION
MIN.
TYP.
MAX.
UNIT
V
DD
supply voltage
4.4
-
5.5
V
RES
DAC
DAC resolution
-
8
-
bit
I
o(DAC)
operating current for each
DAC channel
output pin connected to
V
DDA
via 40 k
-
-
2.5
mA
I
o(DAC)(id)
DAC idle current
all 4 DAC channels
shut-down
-
-
61
µ
A
V
o(DAC)
DAC output level voltage
output pin open
0
-
V
DDA
V
at FFH code input;
I
OH
=
-
1mA (note 1)
V
DDA
-
0.2
-
-
V
at 00H code input;
I
OL
= 1mA
-
-
0.2
V
DL
e
differential non-linearity
output level 0.2 to 4.8 V
-
1
-
+1
LSB
t
st
settling time
-
-
20
ms
V
o(T)
output voltage variation
due to temperature drift
-
-
1.5
mV/
∞
C
V
o
output voltage ripple
T
test
> 20 ms
-
-
2
mV
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT
1997 Dec 12
73
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
27 AC CHARACTERISTICS
V
DD
= 4.5 V to 5.5 V; V
SS
= 0 V; T
amb
=
-
25 to + 85
∞
C; all voltages with respect to V
SS
unless otherwise specified.
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT
f
clk
crystal oscillator frequency
V
DD
= 5 V
10
12
16
MHz
f
PXE
PXE resonator frequency
V
DD
= 5 V
10
12
16
MHz
C
XTAL1
external capacitance at XTAL1
with crystal resonator
-
20
27
pF
with PXE resonator
-
20
27
pF
C
XTAL2
external capacitance at XTAL2
with crystal resonator
-
20
27
pF
with PXE resonator
-
20
27
pF
Analog-to-Digital Converter (software)
V
in(A)
comparator analog input voltages
ADC0; ADC1
V
SS
-
V
DD
V
V
AE
conversion error range
-
-
±
1
/
2
LSB
t
conv(ADC)
conversion time (from any change in
ADC input i.e. voltage level)
-
-
7
µ
s
DDC1 Mode
(1)
(transmit-only, unidirectional); see Figs 25 and 35
t
DOV
output valid from VCLK
-
-
30
µ
s
t
VCLKH
VCLK high time
20
-
-
µ
s
t
VCLKL
VCLK low time
20
-
-
µ
s
t
t(mode)
mode transition time
-
-
800
ns
t
sup(input)
input filter spike suppression; for SDA,
SCL and VSYNC
-
-
200
ns
t
su(DDC1)
DDC1 mode set-up time
-
5
-
µ
s
Horizontal sync input for the mode detection; see Fig.36
Hfreq
HSYNC input frequency
15
-
150
kHz
t
W(HSYNC)
HSYNC input pulse width
notes 2 and 3
0.25
-
8
µ
s
H
DCYC
HSYNC input duty cycle
notes 2 and 3
-
-
25
%
t
ir(HSYNC)
HSYNC input rise time
-
-
100
ns
t
if(HSYNC)
HSYNC input fall time
-
-
100
ns
Vertical Sync Input for the Mode Detection; see Fig.37
Vfreq
VSYNC input frequency
40
-
200
Hz
t
W(VSYNC)
VSYNC input pulse width
note 4
1
-
24
note 5
V
DCYC
VSYNC input duty cycle
note 4
-
-
25
%
t
ir(VSYNC)
VSYNC input rise time
-
-
100
ns
t
if(VSYNC)
VSYNC input fall time
-
-
100
ns

1997 Dec 12
74
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Notes
1. For the DDC2 Mode (bidirectional I
2
C-bus mode), refer to the standard I
2
C-bus specification.
2. The actual sync width has to fulfil both requirements, maximum pulse width t
W(HSYNC)
= 8.0
µ
s and maximum duty
cycle H
DCYC
of 25%, at the same time.
3. The polarity of the horizontal sync pulse is said to be positive if the HIGH period is shorter than the LOW period.
4. The actual sync width has to fulfil both requirements, maximum pulse width t
W(VSYNC)
= 24 horizontal line periods
and maximum duty cycle V
DCYC
of 25%, at the same time.
Composite Sync Input for the Mode Detection; see Figs 38 and 39
T
EQ(CSYNC)
equalizing pulse period for CSYNC
input
-
0.5
-
note 5
t
WEQ(CSYNC)
equalizing pulse width for CSYNC
input
-
0.5
-
note 6
NEQ
equalizing pulses plus the VSYNC
interval
-
-
30
note 5
Horizontal and Vertical Pulse Generation; see Figs 40 and 41
T
H(free)
horizontal pulse period in free running
10
-
66
µ
s
t
WH(free)
horizontal pulse width in free running
0.4
-
2.5
µ
s
t
or(HSYNC)
HSYNC output pulse rise time
30
31
32
ns
t
of(HSYNC)
HSYNC output pulse fall time
24
26
28
ns
t
d(in-out)(HSYNC)
HSYNC output delay to input
-
-
100
ns
t
dmax(HSYNCm)
HSYNC output maximum delay after
missing HSYNC
-
-
350
ns
t
W(HSYNCsub)
HSYNC output substitution pulse width
-
-
2.5
µ
s
t
d(HSYNC-CLAMP)
CLAMP pulse delay to HSYNC input
0
-
125
ns
t
W(CLAMP)
CLAMP pulse width
0.4
-
2.5
µ
s
T
V(free)
vertical pulse period in free running
-
-
2048
note 5
t
WV(free)
vertical pulse width in free running
-
-
32
note 5
t
or(VSYNC)
VSYNC output pulse rise time
22
24
26
ns
t
of(VSYNC)
VSYNC output pulse fall time
24
27
30
ns
t
d(in-out)(VSYNC)
VSYNC output delay to input
-
-
250
ns
t
dmax(VSYNCm)
VSYNC output maximum delay after
missing VSYNC
-
-
1
note 5
t
W(VSYNCsub)
VSYNC output substitution pulse width
-
-
16
note 5
Slope control port
t
tLH(sce)
LOW-to-HIGH transition delay while
slope control enabled
0.1V
DD
to 0.9V
DD
; note 7
25
-
100
ns
t
tHL(sce)
HIGH-to-LOW transition delay while
slope control enabled
0.9V
DD
to 0.1V
DD
; note 7
25
-
100
ns
t
PLH(scd)
LOW-to-HIGH propagation delay while
slope control disabled
0.1V
DD
to 0.9V
DD
;
load = 50 pF
-
-
10
ns
t
PHL(scd)
HIGH-to-LOW propagation delay while
slope control disabled
0.9V
DD
to 0.1V
DD
;
load = 50 pF
-
-
10
ns
SYMBOL
PARAMETER
CONDITIONS
MIN.
TYP.
MAX.
UNIT

1997 Dec 12
75
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
5. Unit is HSYNC line period: T
line(HSYNC).
6. Unit is HSYNC pulse width: t
W(HSYNC)
.
7. This transition delay has to be loaded independent for capacitances up to 50 pF.
Fig.35 Mode transition from DDC1 to DDC2.
handbook, full pagewidth
MGG052
tt(mode)
transmit only mode
(DDC1)
bidirectional mode
(DDC2)
SCL
SDA
VCLK
Fig.36 Horizontal sync input signal.
handbook, full pagewidth
MGG053
HSYNC
tW(HSYNC)
HDCYC
tif(HSYNC)
tir(HSYNC)
THSYNC
Fig.37 Vertical sync input signal.
handbook, full pagewidth
VSYNC
tif(VSYNC)
tir(VSYNC)
TVSYNC
MGG054
tW(VSYNC)
VDCYC

1997 Dec 12
76
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.38 Standard composite sync pulse wave forms.
handbook, full pagewidth
MGG055
HSYNC
HSYNC
CSYNC
CSYNC
VSYNC
tW(CSYNC)
tWEQ(CSYNC)
TEQ(CSYNC)
2nd field
1st field
VSYNC
2nd field
1st field
1
/
Hfreq
NEQ

1997 Dec 12
77
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.39 Composite sync pulse wave forms.
handbook, full pagewidth
MGG056
tW(HSYNC)
1/Hfreq
tW(VSYNC)
tWEQ(CSYNC)
TEQ(CSYNC)
NEQ
HSYNC
VSYNC
CSYNC-1
CSYNC-2
CSYNC-3
CSYNC-4
CSYNC-5
CSYNC-6

1997 Dec 12
78
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.40 Horizontal sync output pulse.
handbook, full pagewidth
MGG057
tW(CLAMP)
tW(CLAMP)
td(HSYNC-CLAMP)
td(HSYNC-CLAMP)
tW(HSYNCsub)
tW(HSYNCsub)
tW(HSYNCsub)
tdmax(HSYNCm)
tdmax(HSYNCm)
td(in-out)(HSYNC)
tWH(free)
tor(HSYNC)
tof(HSYNC)
TH(free)
HSYNC
HSYNCout
(free running)
HSYNCout
(sync/
substitution)
HSYNCout
(sync/substitution
with fixed pulse
width)
CLAMP
(clamp pulse
at back porch)
CLAMP
(clamp pulse
at front porch)

1997 Dec 12
79
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
Fig.41 Vertical sync output pulse.
handbook, full pagewidth
MGG058
tW(VSYNCsub)
tdmax(VSYNCm)
td(in-out)(VSYNC)
tWV(free)
tor(VSYNC)
tof(VSYNC)
TV(free)
VSYNC
VSYNCout
(free running)
VSYNCout
(sync/
substitution)

1997 Dec 12
80
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
28 PACKAGE OUTLINE
UNIT
b
1
c
E
e
M
H
L
REFERENCES
OUTLINE
VERSION
EUROPEAN
PROJECTION
ISSUE DATE
IEC
JEDEC
EIAJ
mm
DIMENSIONS (mm are the original dimensions)
SOT270-1
90-02-13
95-02-04
b
max.
w
M
E
e
1
1.3
0.8
0.53
0.40
0.32
0.23
38.9
38.4
14.0
13.7
3.2
2.9
0.18
1.778
15.24
15.80
15.24
17.15
15.90
1.73
5.08
0.51
4.0
M
H
c
(e )
1
M
E
A
L
seating plane
A
1
w
M
b
1
e
D
A
2
Z
42
1
22
21
b
E
pin 1 index
0
5
10 mm
scale
Note
1. Plastic or metal protrusions of 0.25 mm maximum per side are not included.
(1)
(1)
D
(1)
Z
A
max.
1
2
A
min.
A
max.
SDIP42: plastic shrink dual in-line package; 42 leads (600 mil)
SOT270-1

1997 Dec 12
81
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
29 SOLDERING
29.1
Introduction
There is no soldering method that is ideal for all IC
packages. Wave soldering is often preferred when
through-hole and surface mounted components are mixed
on one printed-circuit board. However, wave soldering is
not always suitable for surface mounted ICs, or for
printed-circuits with high population densities. In these
situations reflow soldering is often used.
This text gives a very brief insight to a complex technology.
A more in-depth account of soldering ICs can be found in
our
"IC Package Databook" (order code 9398 652 90011).
29.2
Soldering by dipping or by wave
The maximum permissible temperature of the solder is
260
∞
C; solder at this temperature must not be in contact
with the joint for more than 5 seconds. The total contact
time of successive solder waves must not exceed
5 seconds.
The device may be mounted up to the seating plane, but
the temperature of the plastic body must not exceed the
specified maximum storage temperature (T
stg max
). If the
printed-circuit board has been pre-heated, forced cooling
may be necessary immediately after soldering to keep the
temperature within the permissible limit.
29.3
Repairing soldered joints
Apply a low voltage soldering iron (less than 24 V) to the
lead(s) of the package, below the seating plane or not
more than 2 mm above it. If the temperature of the
soldering iron bit is less than 300
∞
C it may remain in
contact for up to 10 seconds. If the bit temperature is
between 300 and 400
∞
C, contact may be up to 5 seconds.

1997 Dec 12
82
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
30 DEFINITIONS
31 LIFE SUPPORT APPLICATIONS
These products are not designed for use in life support appliances, devices, or systems where malfunction of these
products can reasonably be expected to result in personal injury. Philips customers using or selling these products for
use in such applications do so at their own risk and agree to fully indemnify Philips for any damages resulting from such
improper use or sale.
32 PURCHASE OF PHILIPS I
2
C COMPONENTS
Data sheet status
Objective specification
This data sheet contains target or goal specifications for product development.
Preliminary specification
This data sheet contains preliminary data; supplementary data may be published later.
Product specification
This data sheet contains final product specifications.
Limiting values
Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one or
more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation
of the device at these or at any other conditions above those given in the Characteristics sections of the specification
is not implied. Exposure to limiting values for extended periods may affect device reliability.
Application information
Where application information is given, it is advisory and does not form part of the specification.
Purchase of Philips I
2
C components conveys a license under the Philips' I
2
C patent to use the
components in the I
2
C system provided the system conforms to the I
2
C specification defined by
Philips. This specification can be ordered using the code 9398 393 40011.

1997 Dec 12
83
Philips Semiconductors
Product specification
Microcontrollers for monitors with DDC
interface, auto-sync detection and sync proc.
P83Cx80; P87C380
NOTES

Internet: http://www.semiconductors.philips.com
Philips Semiconductors ≠ a worldwide company
© Philips Electronics N.V. 1997
SCA56
All rights are reserved. Reproduction in whole or in part is prohibited without the prior written consent of the copyright owner.
The information presented in this document does not form part of any quotation or contract, is believed to be accurate and reliable and may be changed
without notice. No liability will be accepted by the publisher for any consequence of its use. Publication thereof does not convey nor imply any license
under patent- or other industrial or intellectual property rights.
Netherlands: Postbus 90050, 5600 PB EINDHOVEN, Bldg. VB,
Tel. +31 40 27 82785, Fax. +31 40 27 88399
New Zealand: 2 Wagener Place, C.P.O. Box 1041, AUCKLAND,
Tel. +64 9 849 4160, Fax. +64 9 849 7811
Norway: Box 1, Manglerud 0612, OSLO,
Tel. +47 22 74 8000, Fax. +47 22 74 8341
Philippines: Philips Semiconductors Philippines Inc.,
106 Valero St. Salcedo Village, P.O. Box 2108 MCC, MAKATI,
Metro MANILA, Tel. +63 2 816 6380, Fax. +63 2 817 3474
Poland: Ul. Lukiska 10, PL 04-123 WARSZAWA,
Tel. +48 22 612 2831, Fax. +48 22 612 2327
Portugal: see Spain
Romania: see Italy
Russia: Philips Russia, Ul. Usatcheva 35A, 119048 MOSCOW,
Tel. +7 095 755 6918, Fax. +7 095 755 6919
Singapore: Lorong 1, Toa Payoh, SINGAPORE 1231,
Tel. +65 350 2538, Fax. +65 251 6500
Slovakia: see Austria
Slovenia: see Italy
South Africa: S.A. PHILIPS Pty Ltd., 195-215 Main Road Martindale,
2092 JOHANNESBURG, P.O. Box 7430 Johannesburg 2000,
Tel. +27 11 470 5911, Fax. +27 11 470 5494
South America: Al. Vicente Pinzon, 173, 6th floor,
04547-130 S√O PAULO, SP, Brazil,
Tel. +55 11 821 2333, Fax. +55 11 821 2382
Spain: Balmes 22, 08007 BARCELONA,
Tel. +34 3 301 6312, Fax. +34 3 301 4107
Sweden: Kottbygatan 7, Akalla, S-16485 STOCKHOLM,
Tel. +46 8 632 2000, Fax. +46 8 632 2745
Switzerland: Allmendstrasse 140, CH-8027 ZÐRICH,
Tel. +41 1 488 2686, Fax. +41 1 481 7730
Taiwan: Philips Semiconductors, 6F, No. 96, Chien Kuo N. Rd., Sec. 1,
TAIPEI, Taiwan Tel. +886 2 2134 2865, Fax. +886 2 2134 2874
Thailand: PHILIPS ELECTRONICS (THAILAND) Ltd.,
209/2 Sanpavuth-Bangna Road Prakanong, BANGKOK 10260,
Tel. +66 2 745 4090, Fax. +66 2 398 0793
Turkey: Talatpasa Cad. No. 5, 80640 GÐLTEPE/ISTANBUL,
Tel. +90 212 279 2770, Fax. +90 212 282 6707
Ukraine: PHILIPS UKRAINE, 4 Patrice Lumumba str., Building B, Floor 7,
252042 KIEV, Tel. +380 44 264 2776, Fax. +380 44 268 0461
United Kingdom: Philips Semiconductors Ltd., 276 Bath Road, Hayes,
MIDDLESEX UB3 5BX, Tel. +44 181 730 5000, Fax. +44 181 754 8421
United States: 811 East Arques Avenue, SUNNYVALE, CA 94088-3409,
Tel. +1 800 234 7381
Uruguay: see South America
Vietnam: see Singapore
Yugoslavia: PHILIPS, Trg N. Pasica 5/v, 11000 BEOGRAD,
Tel. +381 11 625 344, Fax.+381 11 635 777
For all other countries apply to: Philips Semiconductors,
International Marketing & Sales Communications, Building BE-p,
P.O. Box 218, 5600 MD EINDHOVEN, The Netherlands, Fax. +31 40 27 24825
Argentina: see South America
Australia: 34 Waterloo Road, NORTH RYDE, NSW 2113,
Tel. +61 2 9805 4455, Fax. +61 2 9805 4466
Austria: Computerstr. 6, A-1101 WIEN, P.O. Box 213, Tel. +43 160 1010,
Fax. +43 160 101 1210
Belarus: Hotel Minsk Business Center, Bld. 3, r. 1211, Volodarski Str. 6,
220050 MINSK, Tel. +375 172 200 733, Fax. +375 172 200 773
Belgium: see The Netherlands
Brazil: see South America
Bulgaria: Philips Bulgaria Ltd., Energoproject, 15th floor,
51 James Bourchier Blvd., 1407 SOFIA,
Tel. +359 2 689 211, Fax. +359 2 689 102
Canada: PHILIPS SEMICONDUCTORS/COMPONENTS,
Tel. +1 800 234 7381
China/Hong Kong: 501 Hong Kong Industrial Technology Centre,
72 Tat Chee Avenue, Kowloon Tong, HONG KONG,
Tel. +852 2319 7888, Fax. +852 2319 7700
Colombia: see South America
Czech Republic: see Austria
Denmark: Prags Boulevard 80, PB 1919, DK-2300 COPENHAGEN S,
Tel. +45 32 88 2636, Fax. +45 31 57 0044
Finland: Sinikalliontie 3, FIN-02630 ESPOO,
Tel. +358 9 615800, Fax. +358 9 61580920
France: 51 Rue Carnot, BP317, 92156 SURESNES Cedex,
Tel. +33 1 40 99 6161, Fax. +33 1 40 99 6427
Germany: Hammerbrookstraþe 69, D-20097 HAMBURG,
Tel. +49 40 23 53 60, Fax. +49 40 23 536 300
Greece: No. 15, 25th March Street, GR 17778 TAVROS/ATHENS,
Tel. +30 1 4894 339/239, Fax. +30 1 4814 240
Hungary: see Austria
India: Philips INDIA Ltd, Band Box Building, 2nd floor,
254-D, Dr. Annie Besant Road, Worli, MUMBAI 400 025,
Tel. +91 22 493 8541, Fax. +91 22 493 0966
Indonesia: see Singapore
Ireland: Newstead, Clonskeagh, DUBLIN 14,
Tel. +353 1 7640 000, Fax. +353 1 7640 200
Israel: RAPAC Electronics, 7 Kehilat Saloniki St, PO Box 18053,
TEL AVIV 61180, Tel. +972 3 645 0444, Fax. +972 3 649 1007
Italy: PHILIPS SEMICONDUCTORS, Piazza IV Novembre 3,
20124 MILANO, Tel. +39 2 6752 2531, Fax. +39 2 6752 2557
Japan: Philips Bldg 13-37, Kohnan 2-chome, Minato-ku, TOKYO 108,
Tel. +81 3 3740 5130, Fax. +81 3 3740 5077
Korea: Philips House, 260-199 Itaewon-dong, Yongsan-ku, SEOUL,
Tel. +82 2 709 1412, Fax. +82 2 709 1415
Malaysia: No. 76 Jalan Universiti, 46200 PETALING JAYA, SELANGOR,
Tel. +60 3 750 5214, Fax. +60 3 757 4880
Mexico: 5900 Gateway East, Suite 200, EL PASO, TEXAS 79905,
Tel. +9-5 800 234 7381
Middle East: see Italy
Printed in The Netherlands
457041/1200/01/pp84
Date of release: 1997 Dec 12
Document order number:
9397 750 03171