 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: HD6413007 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |
Document Outline
- Cover
- Cautions
- Preface
- List of Items Revised or Added for This Version
- Contents
- Section 1 Overview
- 1.1 Overview
- 1.2 Internal Block Diagram
- 1.3 Pin Description
- 1.3.1 Pin Arrangement
- 1.3.2 Pin Functions
- 1.3.3 Pin Assignments in Each Mode
- Section 2 CPU
- 2.1 Overview
- 2.1.1 Features
- 2.1.2 Differences from H8/300 CPU
- 2.2 CPU Operating Modes
- 2.3 Address Space
- 2.4 Register Configuration
- 2.4.1 Overview
- 2.4.2 General Registers
- 2.4.3 Control Registers
- 2.4.4 Initial CPU Register Values
- 2.5 Data Formats
- 2.5.1 General Register Data Formats
- 2.5.2 Memory Data Formats
- 2.6 Instruction Set
- 2.6.1 Instruction Set Overview
- 2.6.2 Instructions and Addressing Modes
- 2.6.3 Tables of Instructions Classified by Function
- 2.6.4 Basic Instruction Formats
- 2.6.5 Notes on Use of Bit Manipulation Instructions
- 2.7 Addressing Modes and Effective Address Calculation
- 2.7.1 Addressing Modes
- 2.7.2 Effective Address Calculation
- 2.8 Processing States
- 2.8.1 Overview
- 2.8.2 Program Execution State
- 2.8.3 Exception-Handling State
- 2.8.4 Exception-Handling Sequences
- 2.8.5 Bus-Released State
- 2.8.6 Reset State
- 2.8.7 Power-Down State
- 2.9 Basic Operational Timing
- 2.9.1 Overview
- 2.9.2 On-Chip Memory Access Timing
- 2.9.3 On-Chip Supporting Module Access Timing
- 2.9.4 Access to External Address Space
- Section 3 MCU Operating Modes
- 3.1 Overview
- 3.1.1 Operating Mode Selection
- 3.1.2 Register Configration
- 3.2 Mode Control Register (MDCR)
- 3.3 System Control Register (SYSCR)
- 3.4 Operating Mode Descriptions
- 3.4.1 Mode 1
- 3.4.2 Mode 2
- 3.4.3 Mode 3
- 3.4.4 Mode 4
- 3.5 Pin Functions in Each Operating Mode
- 3.6 Memory Map in Each Operating Mode
- 3.6.1 Note on Reserved Areas
- Section 4 Exception Handling
- 4.1 Overview
- 4.1.1 Exception Handling Types and Priority
- 4.1.2 Exception Handling Operation
- 4.1.3 Exception Vector Table
- 4.2 Reset
- 4.2.1 Overview
- 4.2.2 Reset Sequence
- 4.2.3 Interrupts after Reset
- 4.3 Interrupts
- 4.4 Trap Instruction
- 4.5 Stack Status after Exception Handling
- 4.6 Notes on Stack Usage
- Section 5 Interrupt Controller
- 5.1 Overview
- 5.1.1 Features
- 5.1.2 Block Diagram
- 5.1.3 Pin Configuration
- 5.1.4 Register Configuration
- 5.2 Register Descriptions
- 5.2.1 System Control Register (SYSCR)
- 5.2.2 Interrupt Priority Registers A and B (IPRA, IPRB)
- 5.2.3 IRQ Status Register (ISR)
- 5.2.4 IRQ Enable Register (IER)
- 5.2.5 IRQ Sense Control Register (ISCR)
- 5.3 Interrupt Sources
- 5.3.1 External Interrupts
- 5.3.2 Internal Interrupts
- 5.3.3 Interrupt Vector Table
- 5.4 Interrupt Operation
- 5.4.1 Interrupt Handling Process
- 5.4.2 Interrupt Sequence
- 5.4.3 Interrupt Response Time
- 5.5 Usage Notes
- 5.5.1 Contention between Interrupt and Interrupt-Disabling Instruction
- 5.5.2 Instructions that Inhibit Interrupts
- 5.5.3 Interrupts during EEPMOV Instruction Execution
- Section 6 Bus Controller
- 6.1 Overview
- 6.1.1 Features
- 6.1.2 Block Diagram
- 6.1.3 Pin Configuration
- 6.1.4 Register Configuration
- 6.2 Register Descriptions
- 6.2.1 Bus Width Control Register (ABWCR)
- 6.2.2 Access State Control Register (ASTCR)
- 6.2.3 Wait Control Registers H and L (WCRH, WCRL)
- 6.2.4 Bus Release Control Register (BRCR)
- 6.2.5 Bus Control Register (BCR)
- 6.2.6 Chip Select Control Register (CSCR)
- 6.2.7 DRAM Control Register A (DRCRA)
- 6.2.8 DRAM Control Register B (DRCRB)
- 6.2.9 Refresh Timer Control/Status Register (RTMCSR)
- 6.2.10 Refresh Timer Counter (RTCNT)
- 6.2.11 Refresh Time Constant Register (RTCOR)
- 6.3 Operation
- 6.3.1 Area Division
- 6.3.2 Bus Specifications
- 6.3.3 Memory Interfaces
- 6.3.4 Chip Select Signals
- 6.4 Basic Bus Interface
- 6.4.1 Overview
- 6.4.2 Data Size and Data Alignment
- 6.4.3 Valid Strobes
- 6.4.4 Memory Areas
- 6.4.5 Basic Bus Control Signal Timing
- 6.4.6 Wait Control
- 6.5 DRAM Interface
- 6.5.1 Overview
- 6.5.2 DRAM Space and RAS Output Pin Settings
- 6.5.3 Address Multiplexing
- 6.5.4 Data Bus
- 6.5.5 Pins Used for DRAM Interface
- 6.5.6 Basic Timing
- 6.5.7 Precharge State Control
- 6.5.8 Wait Control
- 6.5.9 Byte Access Control and CAS Output Pin
- 6.5.10 Burst Operation
- 6.5.11 Refresh Control
- 6.5.12 Examples of Use
- 6.5.13 Usage Notes
- 6.6 Interval Timer
- 6.7 Interrupt Sources
- 6.8 Burst ROM Interface
- 6.8.1 Overview
- 6.8.2 Basic Timing
- 6.8.3 Wait Control
- 6.9 Idle Cycle
- 6.9.1 Operation
- 6.9.2 Pin States in Idle Cycle
- 6.10 Bus Arbiter
- 6.11 Register and Pin Input Timing
- 6.11.1 Register Write Timing
- 6.11.2 BREQ Pin Input Timing
- Section 7 DMA Controller
- 7.1 Overview
- 7.1.1 Features
- 7.1.2 Block Diagram
- 7.1.3 Functional Overview
- 7.1.4 Pin Configuration
- 7.1.5 Register Configuration
- 7.2 Register Descriptions (1) (Short Address Mode)
- 7.2.1 Memory Address Registers (MAR)
- 7.2.2 I/O Address Registers (IOAR)
- 7.2.3 Execute Transfer Count Registers (ETCR)
- 7.2.4 Data Transfer Control Registers (DTCR)
- 7.3 Register Descriptions (2) (Full Address Mode)
- 7.3.1 Memory Address Registers (MAR)
- 7.3.2 I/O Address Registers (IOAR)
- 7.3.3 Execute Transfer Count Registers (ETCR)
- 7.3.4 Data Transfer Control Registers (DTCR)
- 7.4 Operation
- 7.4.1 Overview
- 7.4.2 I/O Mode
- 7.4.3 Idle Mode
- 7.4.4 Repeat Mode
- 7.4.5 Normal Mode
- 7.4.6 Block Transfer Mode
- 7.4.7 DMAC Activation
- 7.4.8 DMAC Bus Cycle
- 7.4.9 Multiple-Channel Operation
- 7.4.10 External Bus Requests, DRAM Interface, and DMAC
- 7.4.11 NMI Interrupts and DMAC
- 7.4.12 Aborting a DMAC Transfer
- 7.4.13 Exiting Full Address Mode
- 7.4.14 DMAC States in Reset State, Standby Modes, and Sleep Mode
- 7.5 Interrupts
- 7.6 Usage Notes
- 7.6.1 Note on Word Data Transfer
- 7.6.2 DMAC Self-Access
- 7.6.3 Longword Access to Memory Address Registers
- 7.6.4 Note on Full Address Mode Setup
- 7.6.5 Note on Activating DMAC by Internal Interrupts
- 7.6.6 NMI Interrupts and Block Transfer Mode
- 7.6.7 Memory and I/O Address Register Values
- 7.6.8 Bus Cycle when Transfer is Aborted
- 7.6.9 Transfer Requests by A/D Converter
- Section 8 I/O Ports
- 8.1 Overview
- 8.2 Port 4
- 8.2.1 Overview
- 8.2.2 Register Configuration
- 8.3 Port 6
- 8.3.1 Overview
- 8.3.2 Register Configuration
- 8.4 Port 7
- 8.4.1 Overview
- 8.4.2 Register Configuration
- 8.5 Port 8
- 8.5.1 Overview
- 8.5.2 Register Configuration
- 8.6 Port 9
- 8.6.1 Overview
- 8.6.2 Register Configuration
- 8.7 Port A
- 8.7.1 Overview
- 8.7.2 Register Configuration
- 8.8 Port B
- 8.8.1 Overview
- 8.8.2 Register Configuration
- Section 9 16-Bit Timer
- 9.1 Overview
- 9.1.1 Features
- 9.1.2 Block Diagrams
- 9.1.3 Pin Configuration
- 9.1.4 Register Configuration
- 9.2 Register Descriptions
- 9.2.1 Timer Start Register (TSTR)
- 9.2.2 Timer Synchro Register (TSNC)
- 9.2.3 Timer Mode Register (TMDR)
- 9.2.4 Timer Interrupt Status Register A (TISRA)
- 9.2.5 Timer Interrupt Status Register B (TISRB)
- 9.2.6 Timer Interrupt Status Register C (TISRC)
- 9.2.7 Timer Counters (16TCNT)
- 9.2.8 General Registers (GRA, GRB)
- 9.2.9 Timer Control Registers (16TCR)
- 9.2.10 Timer I/O Control Register (TIOR)
- 9.2.11 Timer Output Level Setting Register C (TOLR)
- 9.3 CPU Interface
- 9.3.1 16-Bit Accessible Registers
- 9.3.2 8-Bit Accessible Registers
- 9.4 Operation
- 9.4.1 Overview
- 9.4.2 Basic Functions
- 9.4.3 Synchronization
- 9.4.4 PWM Mode
- 9.4.5 Phase Counting Mode
- 9.4.6 Setting Initial Value of 16-Bit Timer Output
- 9.5 Interrupts
- 9.5.1 Setting of Status Flags
- 9.5.2 Timing of Clearing of Status Flags
- 9.5.3 Interrupt Sources and DMA Controller Activation
- 9.6 Usage Notes
- Section 10 8-Bit Timers
- 10.1 Overview
- 10.1.1 Features
- 10.1.2 Block Diagram
- 10.1.3 Pin Configuration
- 10.1.4 Register Configuration
- 10.2 Register Descriptions
- 10.2.1 Timer Counters (8TCNT)
- 10.2.2 Time Constant Registers A (TCORA)
- 10.2.3 Time Constant Registers B (TCORB)
- 10.2.4 Timer Control Register (8TCR)
- 10.2.5 Timer Control/Status Registers (8TCSR)
- 10.3 CPU Interface
- 10.4 Operation
- 10.4.1 8TCNT Count Timing
- 10.4.2 Compare Match Timing
- 10.4.3 Input Capture Signal Timing
- 10.4.4 Timing of Status Flag Setting
- 10.4.5 Operation with Cascaded Connection
- 10.4.6 Input Capture Setting
- 10.5 Interrupt
- 10.5.1 Interrupt Source
- 10.5.2 A/D Converter Activation
- 10.6 8-Bit Timer Application Example
- 10.7 Usage Notes
- 10.7.1 Contention between 8TCNT Write and Clear
- 10.7.2 Contention between 8TCNT Write and Increment
- 10.7.3 Contention between TCOR Write and Compare Match
- 10.7.4 Contention between TCOR Read and Input Capture
- 10.7.5 Contention between Counter Clearing by Input Capture and Counter Increment
- 10.7.6 Contention between TCOR Write and Input Capture
- 10.7.7 Contention between 8TCNT Byte Write and Increment in 16-Bit Count Mode (Cascaded Connection)
- 10.7.8 Contention between Compare Matches A and B
- 10.7.9 8TCNT Operation at Internal Clock Source Switchover
- Section 11 Programmable Timing Pattern Controller (TPC)
- 11.1 Overview
- 11.1.1 Features
- 11.1.2 Block Diagram
- 11.1.3 Pin Configuration
- 11.1.4 Register Configuration
- 11.2 Register Descriptions
- 11.2.1 Port A Data Direction Register (PADDR)
- 11.2.2 Port A Data Register (PADR)
- 11.2.3 Port B Data Direction Register (PBDDR)
- 11.2.4 Port B Data Register (PBDR)
- 11.2.5 Next Data Register A (NDRA)
- 11.2.6 Next Data Register B (NDRB)
- 11.2.7 Next Data Enable Register A (NDERA)
- 11.2.8 Next Data Enable Register B (NDERB)
- 11.2.9 TPC Output Control Register (TPCR)
- 11.2.10 TPC Output Mode Register (TPMR)
- 11.3 Operation
- 11.3.1 Overview
- 11.3.2 Output Timing
- 11.3.3 Normal TPC Output
- 11.3.4 Non-Overlapping TPC Output
- 11.3.5 TPC Output Triggering by Input Capture
- 11.4 Usage Notes
- 11.4.1 Operation of TPC Output Pins
- 11.4.2 Note on Non-Overlapping Output
- Section 12 Watchdog Timer
- 12.1 Overview
- 12.1.1 Features
- 12.1.2 Block Diagram
- 12.1.3 Pin Configuration
- 12.1.4 Register Configuration
- 12.2 Register Descriptions
- 12.2.1 Timer Counter (TCNT)
- 12.2.2 Timer Control/Status Register (TCSR)
- 12.2.3 Reset Control/Status Register (RSTCSR)
- 12.2.4 Notes on Register Access
- 12.3 Operation
- 12.3.1 Watchdog Timer Operation
- 12.3.2 Interval Timer Operation
- 12.3.3 Timing of Setting of Overflow Flag (OVF)
- 12.3.4 Timing of Setting of Watchdog Timer Reset Bit (WRST)
- 12.4 Interrupts
- 12.5 Usage Notes
- Section 13 Serial Communication Interface
- 13.1 Overview
- 13.1.1 Features
- 13.1.2 Block Diagram
- 13.1.3 Pin Configuration
- 13.1.4 Register Configuration
- 13.2 Register Descriptions
- 13.2.1 Receive Shift Register (RSR)
- 13.2.2 Receive Data Register (RDR)
- 13.2.3 Transmit Shift Register (TSR)
- 13.2.4 Transmit Data Register (TDR)
- 13.2.5 Serial Mode Register (SMR)
- 13.2.6 Serial Control Register (SCR)
- 13.2.7 Serial Status Register (SSR)
- 13.2.8 Bit Rate Register (BRR)
- 13.3 Operation
- 13.3.1 Overview
- 13.3.2 Operation in Asynchronous Mode
- 13.3.3 Multiprocessor Communication
- 13.3.4 Synchronous Operation
- 13.4 SCI Interrupts
- 13.5 Usage Notes
- 13.5.1 Notes on Use of SCI
- Section 14 Smart Card Interface
- 14.1 Overview
- 14.1.1 Features
- 14.1.2 Block Diagram
- 14.1.3 Pin Configuration
- 14.1.4 Register Configuration
- 14.2 Register Descriptions
- 14.2.1 Smart Card Mode Register (SCMR)
- 14.2.2 Serial Status Register (SSR)
- 14.2.3 Serial Mode Register (SMR)
- 14.2.4 Serial Control Register (SCR)
- 14.3 Operation
- 14.3.1 Overview
- 14.3.2 Pin Connections
- 14.3.3 Data Format
- 14.3.4 Register Settings
- 14.3.5 Clock
- 14.3.6 Transmitting and Receiving Data
- 14.4 Usage Notes
- Section 15 A/D Converter
- 15.1 Overview
- 15.1.1 Features
- 15.1.2 Block Diagram
- 15.1.3 Pin Configuration
- 15.1.4 Register Configuration
- 15.2 Register Descriptions
- 15.2.1 A/D Data Registers A to D (ADDRA to ADDRD)
- 15.2.2 A/D Control/Status Register (ADCSR)
- 15.2.3 A/D Control Register (ADCR)
- 15.3 CPU Interface
- 15.4 Operation
- 15.4.1 Single Mode (SCAN = 0)
- 15.4.2 Scan Mode (SCAN = 1)
- 15.4.3 Input Sampling and A/D Conversion Time
- 15.4.4 External Trigger Input Timing
- 15.5 Interrupts
- 15.6 Usage Notes
- Section 16 D/A Converter
- 16.1 Overview
- 16.1.1 Features
- 16.1.2 Block Diagram
- 16.1.3 Pin Configuration
- 16.1.4 Register Configuration
- 16.2 Register Descriptions
- 16.2.1 D/A Data Registers 0 and 1 (DADR0/1)
- 16.2.2 D/A Control Register (DACR)
- 16.2.3 D/A Standby Control Register (DASTCR)
- 16.3 Operation
- 16.4 D/A Output Control
- Section 17 RAM
- 17.1 Overview
- 17.1.1 Block Diagram
- 17.1.2 Register Configuration
- 17.2 System Control Register (SYSCR)
- 17.3 Operation
- Section 18 Clock Pulse Generator
- 18.1 Overview
- 18.2 Oscillator Circuit
- 18.2.1 Connecting a Crystal Resonator
- 18.2.2 External Clock Input
- 18.3 Duty Adjustment Circuit
- 18.4 Prescalers
- 18.5 Frequency Divider
- 18.5.1 Register Configuration
- 18.5.2 Division Control Register (DIVCR)
- 18.5.3 Usage Notes
- Section 19 Power-Down State
- 19.1 Overview
- 19.2 Register Configuration
- 19.2.1 System Control Register (SYSCR)
- 19.2.2 Module Standby Control RegisterH (MSTCRH)
- 19.2.3 Module Standby Control Register L (MSTCRL)
- 19.3 Sleep Mode
- 19.3.1 Transition to Sleep Mode
- 19.3.2 Exit from Sleep Mode
- 19.4 Software Standby Mode
- 19.4.1 Transition to Software Standby Mode
- 19.4.2 Exit from Software Standby Mode
- 19.4.3 Selection of Waiting Time for Exit from Software Standby Mode
- 19.4.4 Sample Application of Software Standby Mode
- 19.4.5 Note
- 19.5 Hardware Standby Mode
- 19.5.1 Transition to Hardware Standby Mode
- 19.5.2 Exit from Hardware Standby Mode
- 19.5.3 Timing for Hardware Standby Mode
- 19.6 Module Standby Function
- 19.6.1 Module Standby Timing
- 19.6.2 Read/Write in Module Standby
- 19.6.3 Usage Notes
- 19.7 System Clock Output Disabling Function
- Section 20 Electrical Characteristics
- 20.1 Absolute Maximum Ratings
- 20.2 Electrical Characteristics
- 20.2.1 DC Characteristics
- 20.2.2 AC Characteristics
- 20.2.3 A/D Conversion Characteristics
- 20.2.4 D/A Conversion Characteristics
- 20.3 Operational Timing
- 20.3.1 Clock Timing
- 20.3.2 Control Signal Timing
- 20.3.3 Bus Timing
- 20.3.4 DRAM Interface Bus Timing
- 20.3.5 TPC and I/O Port Timing
- 20.3.6 Timer Input/Output Timing
- 20.3.7 SCI Input/Output Timing
- 20.3.8 DMAC Timing
- Appendix A Instruction Set
- A.1 Instruction List
- A.2 Operation Code Map
- A.3 Number of States Required for Execution
- Appendix B Internal I/O Registers
- B.1 Addresses
- B.2 Functions
- Appendix C I/O Port Block Diagrams
- C.1 Port 4 Block Diagram
- C.2 Port 6 Block Diagrams
- C.3 Port 7 Block Diagrams
- C.4 Port 8 Block Diagrams
- C.5 Port 9 Block Diagrams
- C.6 Port A Block Diagrams
- C.7 Port B Block Diagrams
- Appendix D Pin States
- D.1 Port States in Each Mode
- D.2 Pin States at Reset
- Appendix E Timing of Transition to and Recovery from Hardware Standby Mode
- Appendix F List of Product Codes
- Appendix G Package Dimensions
- Appendix H Comparison of H8/300H Series Product Specifications
- H.1 Differences between H8/3067 and H8/3062 Series, H8/3048 Series, H8/3007 and H8/3006, and H8/3002
- H.2 Comparison of Pin Functions of 100-Pin Package Products (FP-100B, TFP-100B)
- Colophon

Regarding the change of names mentioned in the document, such as Hitachi
Electric and Hitachi XX, to Renesas Technology Corp.
The semiconductor operations of Mitsubishi Electric and Hitachi were transferred to Renesas
Technology Corporation on April 1st 2003. These operations include microcomputer, logic, analog
and discrete devices, and memory chips other than DRAMs (flash memory, SRAMs etc.)
Accordingly, although Hitachi, Hitachi, Ltd., Hitachi Semiconductors, and other Hitachi brand
names are mentioned in the document, these names have in fact all been changed to Renesas
Technology Corp. Thank you for your understanding. Except for our corporate trademark, logo and
corporate statement, no changes whatsoever have been made to the contents of the document, and
these changes do not constitute any alteration to the contents of the document itself.
Renesas Technology Home Page: http://www.renesas.com
Renesas Technology Corp.
Customer Support Dept.
April 1, 2003
To all our customers
Cautions
Keep safety first in your circuit designs!
1.
Renesas Technology Corporation puts the maximum effort into making semiconductor products better and more reliable, but
there is always the possibility that trouble may occur with them. Trouble with semiconductors may lead to personal injury, fire
or property damage.
Remember to give due consideration to safety when making your circuit designs, with appropriate measures such as (i)
placement of substitutive, auxiliary circuits, (ii) use of nonflammable material or (iii) prevention against any malfunction or
mishap.
Notes regarding these materials
1.
These materials are intended as a reference to assist our customers in the selection of the Renesas Technology Corporation
product best suited to the customer's application; they do not convey any license under any intellectual property rights, or any
other rights, belonging to Renesas Technology Corporation or a third party.
2.
Renesas Technology Corporation assumes no responsibility for any damage, or infringement of any third-party's rights,
originating in the use of any product data, diagrams, charts, programs, algorithms, or circuit application examples contained in
these materials.
3.
All information contained in these materials, including product data, diagrams, charts, programs and algorithms represents
information on products at the time of publication of these materials, and are subject to change by Renesas Technology
Corporation without notice due to product improvements or other reasons. It is therefore recommended that customers contact
Renesas Technology Corporation or an authorized Renesas Technology Corporation product distributor for the latest product
information before purchasing a product listed herein.
The information described here may contain technical inaccuracies or typographical errors.
Renesas Technology Corporation assumes no responsibility for any damage, liability, or other loss rising from these
inaccuracies or errors.
Please also pay attention to information published by Renesas Technology Corporation by various means, including the
Renesas Technology Corporation Semiconductor home page (http://www.renesas.com).
4.
When using any or all of the information contained in these materials, including product data, diagrams, charts, programs, and
algorithms, please be sure to evaluate all information as a total system before making a final decision on the applicability of
the information and products. Renesas Technology Corporation assumes no responsibility for any damage, liability or other
loss resulting from the information contained herein.
5.
Renesas Technology Corporation semiconductors are not designed or manufactured for use in a device or system that is used
under circumstances in which human life is potentially at stake. Please contact Renesas Technology Corporation or an
authorized Renesas Technology Corporation product distributor when considering the use of a product contained herein for
any specific purposes, such as apparatus or systems for transportation, vehicular, medical, aerospace, nuclear, or undersea
repeater use.
6.
The prior written approval of Renesas Technology Corporation is necessary to reprint or reproduce in whole or in part these
materials.
7.
If these products or technologies are subject to the Japanese export control restrictions, they must be exported under a license
from the Japanese government and cannot be imported into a country other than the approved destination.
Any diversion or reexport contrary to the export control laws and regulations of Japan and/or the country of destination is
prohibited.
8.
Please contact Renesas Technology Corporation for further details on these materials or the products contained therein.
H8/3006, H8/3007
HD6413006, HD6413007
Hardware Manual
ADE-602-145C
Rev. 4.0
3/4/03
Hitachi, Ltd.
The revision list can be viewed directly by
clicking the title page.
The revision list summarizes the locations of
revisions and additions. Details should always
be checked by referring to the relevant text.
Cautions
1. Hitachi neither warrants nor grants licenses of any rights of Hitachi's or any third party's
patent, copyright, trademark, or other intellectual property rights for information contained in
this document. Hitachi bears no responsibility for problems that may arise with third party's
rights, including intellectual property rights, in connection with use of the information
contained in this document.
2. Products and product specifications may be subject to change without notice. Confirm that you
have received the latest product standards or specifications before final design, purchase or
use.
3. Hitachi makes every attempt to ensure that its products are of high quality and reliability.
However, contact Hitachi's sales office before using the product in an application that
demands especially high quality and reliability or where its failure or malfunction may directly
threaten human life or cause risk of bodily injury, such as aerospace, aeronautics, nuclear
power, combustion control, transportation, traffic, safety equipment or medical equipment for
life support.
4. Design your application so that the product is used within the ranges guaranteed by Hitachi
particularly for maximum rating, operating supply voltage range, heat radiation characteristics,
installation conditions and other characteristics. Hitachi bears no responsibility for failure or
damage when used beyond the guaranteed ranges. Even within the guaranteed ranges,
consider normally foreseeable failure rates or failure modes in semiconductor devices and
employ systemic measures such as fail-safes, so that the equipment incorporating Hitachi
product does not cause bodily injury, fire or other consequential damage due to operation of
the Hitachi product.
5. This product is not designed to be radiation resistant.
6. No one is permitted to reproduce or duplicate, in any form, the whole or part of this document
without written approval from Hitachi.
7. Contact Hitachi's sales office for any questions regarding this document or Hitachi
semiconductor products.

Preface
The H8/3006 and H8/3007 is a series of high-performance microcontrollers that integrate system
supporting functions together with an H8/300H CPU core.
The H8/300H CPU has a 32-bit internal architecture with sixteen 16-bit general registers, and a
concise, optimized instruction set designed for speed. It can address a 16-Mbyte linear address
space.
The on-chip supporting functions include RAM, 16-bit timers, 8-bit timers, a programmable
timing pattern controller (TPC), a watchdog timer (WDT), a serial communication interface (SCI),
an A/D converter, a D/A converter, I/O ports, and a DMA controller (DMAC).
The address space is divided into eight areas. The data bus width and access cycle length can be
selected independently in each area, simplifying the connection of different types of memory. Four
MCU operating modes (modes 1 to 4) are provided, offering a choice of data bus width initial
value and address space.
With these features, the H8/3006 and H8/3007 offers easy implementation of compact, high-
performance systems.
This manual describes the H8/3006 and H8/3007 Series hardware. For details of the instruction
set, refer to the H8/300H Series Programming Manual.

List of Items Revised or Added for This Version
Page
Item
Description
3
1.1 Overview
Table 1-1 Feature Watchdog timer (WDT)
Specification description
amended
28
2.6.1 Instruction Set Overview
Number of instruction
types amended
35
Table 2-7 Bit Manipulation Instructions
Function description
added
41
2.6.5 Notes on Use of Bit Manipulation Instruction
Explanation
Description added
45
Table 2-13 Effective Address Calculation
No. 1 in Addressing Mode
and Instruction Format
column amended
57
Table 3-1 Operating Mode Selection
Table amended
57
3.1.1 Operating Mode Selection
Description added
70
4.2.2 Reset Sequence
Description added
77
5.1.1 Features
Description added
144
Figure 6.15 Example of Wait State Insertion Timing
Figure amended
175
Figure 6.42 Example of Idle Cycle Operation (2)
(ICIS0 = 1)
(b) Idle cycle inserted
Bus cycle B amended
205
7.4.2 I/O Mode
Description added
Table 7.6 Register Functions in I/O Mode
Description added
207
7.4.3 Idle Mode
Description added
208
Table 7.7 Register Functions in Idle Mode
Description added
210
7.4.4 Repeat Mode
Description added
211
Table 7.8 Register Functions in Repeat Mode
Description added
226
7.4.8 DMAC Bus Cycle
Note added
248
8.3.2 Register Configuration
Port 6 Data Direction Register (P6DDR)
Description amended
249
8.3.2 Register Configuration
Port 6 Data Register (P6DR)
Description amended
253
8.5.1 Overview
Reference changed
Figure 8.4 Port 8 Pin Configuration
Description added
254
8.5.2 Register Configuration
Port 8 Data Direction Register (P8DDR)
Description amended

Page
Item
Description
255
8.5.2 Register Configuration
Port 8 Data Register (P8DR)
Description amended
258
8.6.2 Register Configuration
Port 9 Data Direction Register (P9DDR)
Description amended
263
8.7.2 Register Configuration
Port A Data Direction Register (PADDR)
Description amended
272
Figure 8.7 Port B Pin Configuration
Description added
273
8.8.2 Register Configuration
Port B Data Direction Register (PBDDR)
Description amended
279 to 346
Section 9 16-Bit Timers
Register names changed
TCNT
16TCNT
TCR
16TCR
347 to 382
Section 10 8-Bit Timers
Register names changed
TCNT
8TCNT
TCR
8TCR
TCSR
8TCSR
351
Table 10.2 8-Bit Timer Register
8TCSR2 initial value
changed
355
10.2.4 Timer Control Register (8TCR)
Bits 4 and 3
Description amended
358
10.2.5 Timer Control/Status Registers (8TCSR)
Bit 4
Description added
411
Table 12.2 WDT Registers
Note 3 added
462
Figure 13.5 Sample Flowchart for Transmitting Serial
Data
Description added to (1)
502
Table 14.5 Bit Rates (bit/s) for Various BRR Settings
(When n = 0)
20.00 MHz value added
503
Table 14.6 BRR Settings for Typical Bit Rates (bits/s)
(When n = 0)
20.00 MHz value added
Table 14.7 Maximum Bit Rate for Various Frequencies
(Smart Card Interface Mode)
20.00 MHz value added
511
Figure 14.10 Procedure for Stopping and Restarting
the Clock
Restart procedure
amended
554
Figure 18.7 External Clock Output Setting Delay
Timing
Figure amended
556
18.5.3 Usage Notes
Text of 1st note amended
640, 641
B.1 Addresses
Register names amended
Page
Item
Description
647
B.2 Functions
P8DDR--Port 8 Data Direction Register
Note deleted
680
B.2 Functions
TSTR--Timer Start Register
Description amended
681
B.2 Functions
TSNC--Timer Syncro Register
Description amended
682
B.2 Functions
TMDR--Timer Mode Register
Description amended
684
B.2 Functions
TISRA--Timer Interrupt Status Register A
Description amended
685
B.2 Function
TISRB--Timer Interrupt Status Register B
Description amended
686
B.2 Functions
TISRC--Timer Interrupt Status Register C
Description amended
687
B.2 Functions
16TCR0--Timer Control Register 0
Register name changed
689
B.2 Functions
16TCNT0H/L--Timer Counter 0H/L
Register name changed
690
B.2 Functions
16TCR1--Timer Control Register 1
Register name changed
B.2 Function
16TCNT1H/L--Timer Counter 1H/L
Register name changed
691
B.2 Functions
16TCR2--Timer Control Register 2
Register name changed
692
B.2 Functions
16TCNT2H/L--Timer Counter 2H/L
Register name changed
694
B.2 Functions
8TCR0--Timer Control Register 0
8TCR1--Timer Control Register 1
Register names changed,
description amended
695
B.2 Functions
8TCSR0--Timer Control/Status Register 0
Register names changed,
description amended
696
B.2 Functions
8TCSR1--Timer Control/Status Register 1
Register names changed,
description amended
697
B.2 Functions
8TCNT0--Timer Counter 0
8TCNT1--Timer Counter 1
Register names changed
700
B.2 Functions
8TCR2--Timer Control Register 2
8TCR3--Timer Control Register 3
Register names changed,
description amended
Page
Item
Description
701
B.2 Functions
8TCSR2--Timer Control/Status Register 2
8TCSR3--Timer Control/Status Register 3
Register names changed,
description amended
702
B.2 Functions
8TCNT2--Timer Counter 2
8TCNT3--Timer Counter 3
Register name changed
723
B.2 Functions
P6DR--Port 6 Data Register
Description amended
729
Figure C.1 Port 4 Block Diagram
Figure amended
730 to 732
Figure C.2(a) to Figure C.2(c)
Port 6 Block Diagram
Figure amended
735 to 738
Figure C.4(a) to Figure C.4(d)
Port 8 Block Diagram
Figure amended
739 to 744
Figure C.5(a) to Figure C.5(f)
Port 8 Block Diagram
Figure amended
745 to 747
Figure C.6(a) to Figure C.6(c)
Port A Block Diagram
Figure amended
748 to 753
Figure C.7(a) to Figure C.7(f)
Port B Block Diagram
Figure amended

i
Contents
Section 1 Overview
..............................................................................................................
1
1.1
Overview............................................................................................................................
1
1.2
Internal Block Diagram .....................................................................................................
5
1.3
Pin Description ..................................................................................................................
6
1.3.1
Pin Arrangement ..................................................................................................
6
1.3.2
Pin Functions........................................................................................................
8
1.3.3
Pin Assignments in Each Mode............................................................................
13
Section 2 CPU
.......................................................................................................................
17
2.1
Overview............................................................................................................................
17
2.1.1
Features ................................................................................................................
17
2.1.2
Differences from H8/300 CPU .............................................................................
18
2.2
CPU Operating Modes ......................................................................................................
19
2.3
Address Space....................................................................................................................
20
2.4
Register Configuration ......................................................................................................
21
2.4.1
Overview ..............................................................................................................
21
2.4.2
General Registers..................................................................................................
22
2.4.3
Control Registers..................................................................................................
23
2.4.4
Initial CPU Register Values .................................................................................
24
2.5
Data Formats......................................................................................................................
25
2.5.1
General Register Data Formats ............................................................................
25
2.5.2
Memory Data Formats..........................................................................................
26
2.6
Instruction Set....................................................................................................................
28
2.6.1
Instruction Set Overview......................................................................................
28
2.6.2
Instructions and Addressing Modes .....................................................................
29
2.6.3
Tables of Instructions Classified by Function......................................................
30
2.6.4
Basic Instruction Formats.....................................................................................
39
2.6.5
Notes on Use of Bit Manipulation Instructions....................................................
40
2.7
Addressing Modes and Effective Address Calculation .....................................................
42
2.7.1
Addressing Modes................................................................................................
42
2.7.2
Effective Address Calculation..............................................................................
44
2.8
Processing States ...............................................................................................................
48
2.8.1
Overview ..............................................................................................................
48
2.8.2
Program Execution State ......................................................................................
49
2.8.3
Exception-Handling State ....................................................................................
49
2.8.4
Exception-Handling Sequences............................................................................
51
2.8.5
Bus-Released State ...............................................................................................
52
2.8.6
Reset State ............................................................................................................
52
2.8.7
Power-Down State................................................................................................
52

ii
2.9
Basic Operational Timing..................................................................................................
53
2.9.1
Overview ..............................................................................................................
53
2.9.2
On-Chip Memory Access Timing ........................................................................
53
2.9.3
On-Chip Supporting Module Access Timing.......................................................
54
2.9.4
Access to External Address Space........................................................................
55
Section 3 MCU Operating Modes
...................................................................................
57
3.1
Overview............................................................................................................................
57
3.1.1
Operating Mode Selection....................................................................................
57
3.1.2
Register Configration ...........................................................................................
58
3.2
Mode Control Register (MDCR) .......................................................................................
58
3.3
System Control Register (SYSCR)....................................................................................
59
3.4
Operating Mode Descriptions............................................................................................
62
3.4.1
Mode 1..................................................................................................................
62
3.4.2
Mode 2..................................................................................................................
62
3.4.3
Mode 3..................................................................................................................
62
3.4.4
Mode 4..................................................................................................................
62
3.5
Pin Functions in Each Operating Mode.............................................................................
63
3.6
Memory Map in Each Operating Mode.............................................................................
63
3.6.1
Note on Reserved Areas .......................................................................................
63
Section 4 Exception Handling
..........................................................................................
67
4.1
Overview............................................................................................................................
67
4.1.1
Exception Handling Types and Priority ...............................................................
67
4.1.2
Exception Handling Operation .............................................................................
67
4.1.3
Exception Vector Table........................................................................................
68
4.2
Reset ..................................................................................................................................
70
4.2.1
Overview ..............................................................................................................
70
4.2.2
Reset Sequence .....................................................................................................
70
4.2.3
Interrupts after Reset ............................................................................................
72
4.3
Interrupts............................................................................................................................
73
4.4
Trap Instruction .................................................................................................................
73
4.5
Stack Status after Exception Handling ..............................................................................
74
4.6
Notes on Stack Usage ........................................................................................................
74
Section 5 Interrupt Controller
...........................................................................................
77
5.1
Overview............................................................................................................................
77
5.1.1
Features ................................................................................................................
77
5.1.2
Block Diagram......................................................................................................
78
5.1.3
Pin Configuration .................................................................................................
79
5.1.4
Register Configuration .........................................................................................
79
5.2
Register Descriptions.........................................................................................................
80
5.2.1
System Control Register (SYSCR) ......................................................................
80

iii
5.2.2
Interrupt Priority Registers A and B (IPRA, IPRB) .............................................
81
5.2.3
IRQ Status Register (ISR) ....................................................................................
88
5.2.4
IRQ Enable Register (IER) ..................................................................................
89
5.2.5
IRQ Sense Control Register (ISCR).....................................................................
90
5.3
Interrupt Sources................................................................................................................
91
5.3.1
External Interrupts................................................................................................
91
5.3.2
Internal Interrupts .................................................................................................
92
5.3.3
Interrupt Vector Table ..........................................................................................
92
5.4
Interrupt Operation ............................................................................................................
96
5.4.1
Interrupt Handling Process ...................................................................................
96
5.4.2
Interrupt Sequence................................................................................................ 101
5.4.3
Interrupt Response Time ...................................................................................... 102
5.5
Usage Notes ....................................................................................................................... 103
5.5.1
Contention between Interrupt and Interrupt-Disabling Instruction...................... 103
5.5.2
Instructions that Inhibit Interrupts........................................................................ 104
5.5.3
Interrupts during EEPMOV Instruction Execution .............................................. 104
Section 6 Bus Controller
.................................................................................................... 105
6.1
Overview............................................................................................................................ 105
6.1.1
Features ................................................................................................................ 105
6.1.2
Block Diagram...................................................................................................... 107
6.1.3
Pin Configuration ................................................................................................. 108
6.1.4
Register Configuration ......................................................................................... 109
6.2
Register Descriptions......................................................................................................... 110
6.2.1
Bus Width Control Register (ABWCR) ............................................................... 110
6.2.2
Access State Control Register (ASTCR).............................................................. 111
6.2.3
Wait Control Registers H and L (WCRH, WCRL).............................................. 111
6.2.4
Bus Release Control Register (BRCR) ................................................................ 115
6.2.5
Bus Control Register (BCR) ................................................................................ 116
6.2.6
Chip Select Control Register (CSCR) .................................................................. 118
6.2.7
DRAM Control Register A (DRCRA) ................................................................. 119
6.2.8
DRAM Control Register B (DRCRB).................................................................. 121
6.2.9
Refresh Timer Control/Status Register (RTMCSR) ............................................ 124
6.2.10 Refresh Timer Counter (RTCNT) ........................................................................ 125
6.2.11 Refresh Time Constant Register (RTCOR).......................................................... 126
6.3
Operation ........................................................................................................................... 127
6.3.1
Area Division........................................................................................................ 127
6.3.2
Bus Specifications ................................................................................................ 129
6.3.3
Memory Interfaces................................................................................................ 130
6.3.4
Chip Select Signals............................................................................................... 130
6.4
Basic Bus Interface............................................................................................................ 132
6.4.1
Overview .............................................................................................................. 132
6.4.2
Data Size and Data Alignment ............................................................................. 132

iv
6.4.3
Valid Strobes ....................................................................................................... 133
6.4.4
Memory Areas...................................................................................................... 134
6.4.5
Basic Bus Control Signal Timing......................................................................... 136
6.4.6
Wait Control ......................................................................................................... 143
6.5
DRAM Interface ................................................................................................................ 145
6.5.1
Overview .............................................................................................................. 145
6.5.2
DRAM Space and
RAS Output Pin Settings ....................................................... 145
6.5.3
Address Multiplexing ........................................................................................... 146
6.5.4
Data Bus ............................................................................................................... 146
6.5.5
Pins Used for DRAM Interface ............................................................................ 146
6.5.6
Basic Timing ........................................................................................................ 147
6.5.7
Precharge State Control........................................................................................ 148
6.5.8
Wait Control ......................................................................................................... 149
6.5.9
Byte Access Control and
CAS Output Pin........................................................... 150
6.5.10 Burst Operation .................................................................................................... 152
6.5.11 Refresh Control .................................................................................................... 157
6.5.12 Examples of Use................................................................................................... 160
6.5.13 Usage Notes.......................................................................................................... 164
6.6
Interval Timer .................................................................................................................... 167
6.6.1
Operation .............................................................................................................. 167
6.7
Interrupt Sources................................................................................................................ 172
6.8
Burst ROM Interface ......................................................................................................... 172
6.8.1
Overview .............................................................................................................. 172
6.8.2
Basic Timing ........................................................................................................ 172
6.8.3
Wait Control ......................................................................................................... 173
6.9
Idle Cycle........................................................................................................................... 174
6.9.1
Operation .............................................................................................................. 174
6.9.2
Pin States in Idle Cycle ........................................................................................ 177
6.10
Bus Arbiter ........................................................................................................................ 178
6.10.1 Operation .............................................................................................................. 178
6.11
Register and Pin Input Timing .......................................................................................... 181
6.11.1 Register Write Timing.......................................................................................... 181
6.11.2
BREQ Pin Input Timing....................................................................................... 182
Section 7 DMA Controller
................................................................................................ 183
7.1
Overview............................................................................................................................ 183
7.1.1
Features ................................................................................................................ 183
7.1.2
Block Diagram...................................................................................................... 184
7.1.3
Functional Overview ............................................................................................ 185
7.1.4
Pin Configuration ................................................................................................. 186
7.1.5
Register Configuration ......................................................................................... 186
7.2
Register Descriptions (1) (Short Address Mode) .............................................................. 188
7.2.1
Memory Address Registers (MAR)...................................................................... 188

v
7.2.2
I/O Address Registers (IOAR) ............................................................................. 189
7.2.3
Execute Transfer Count Registers (ETCR) .......................................................... 189
7.2.4
Data Transfer Control Registers (DTCR) ............................................................ 191
7.3
Register Descriptions (2) (Full Address Mode) ................................................................ 194
7.3.1
Memory Address Registers (MAR)...................................................................... 194
7.3.2
I/O Address Registers (IOAR) ............................................................................. 194
7.3.3
Execute Transfer Count Registers (ETCR) .......................................................... 195
7.3.4
Data Transfer Control Registers (DTCR) ............................................................ 197
7.4
Operation ........................................................................................................................... 203
7.4.1
Overview .............................................................................................................. 203
7.4.2
I/O Mode .............................................................................................................. 205
7.4.3
Idle Mode.............................................................................................................. 207
7.4.4
Repeat Mode ........................................................................................................ 210
7.4.5
Normal Mode........................................................................................................ 214
7.4.6
Block Transfer Mode............................................................................................ 217
7.4.7
DMAC Activation ................................................................................................ 222
7.4.8
DMAC Bus Cycle ................................................................................................ 224
7.4.9
Multiple-Channel Operation ................................................................................ 230
7.4.10 External Bus Requests, DRAM Interface, and DMAC........................................ 231
7.4.11 NMI Interrupts and DMAC.................................................................................. 232
7.4.12 Aborting a DMAC Transfer ................................................................................. 233
7.4.13 Exiting Full Address Mode .................................................................................. 234
7.4.14 DMAC States in Reset State, Standby Modes, and Sleep Mode.......................... 235
7.5
Interrupts............................................................................................................................ 236
7.6
Usage Notes ....................................................................................................................... 237
7.6.1
Note on Word Data Transfer ................................................................................ 237
7.6.2
DMAC Self-Access.............................................................................................. 237
7.6.3
Longword Access to Memory Address Registers ................................................ 237
7.6.4
Note on Full Address Mode Setup ....................................................................... 237
7.6.5
Note on Activating DMAC by Internal Interrupts ............................................... 238
7.6.6
NMI Interrupts and Block Transfer Mode............................................................ 239
7.6.7
Memory and I/O Address Register Values .......................................................... 239
7.6.8
Bus Cycle when Transfer is Aborted.................................................................... 240
7.6.9
Transfer Requests by A/D Converter ................................................................... 240
Section 8 I/O Ports
............................................................................................................... 241
8.1
Overview............................................................................................................................ 241
8.2
Port 4.................................................................................................................................. 244
8.2.1
Overview .............................................................................................................. 244
8.2.2
Register Configuration ......................................................................................... 245
8.3
Port 6.................................................................................................................................. 247
8.3.1
Overview .............................................................................................................. 247
8.3.2
Register Configuration ......................................................................................... 248

vi
8.4
Port 7.................................................................................................................................. 251
8.4.1
Overview .............................................................................................................. 251
8.4.2
Register Configuration ......................................................................................... 252
8.5
Port 8.................................................................................................................................. 253
8.5.1
Overview .............................................................................................................. 253
8.5.2
Register Configuration ......................................................................................... 254
8.6
Port 9.................................................................................................................................. 257
8.6.1
Overview .............................................................................................................. 257
8.6.2
Register Configuration ......................................................................................... 258
8.7
Port A................................................................................................................................. 261
8.7.1
Overview .............................................................................................................. 261
8.7.2
Register Configuration ......................................................................................... 263
8.8
Port B ................................................................................................................................. 272
8.8.1
Overview .............................................................................................................. 272
8.8.2
Register Configuration ......................................................................................... 273
Section 9 16-Bit Timer
....................................................................................................... 279
9.1
Overview............................................................................................................................ 279
9.1.1
Features ................................................................................................................ 279
9.1.2
Block Diagrams.................................................................................................... 282
9.1.3
Pin Configuration ................................................................................................. 285
9.1.4
Register Configuration ......................................................................................... 286
9.2
Register Descriptions......................................................................................................... 288
9.2.1
Timer Start Register (TSTR)................................................................................ 288
9.2.2
Timer Synchro Register (TSNC).......................................................................... 289
9.2.3
Timer Mode Register (TMDR) ............................................................................ 290
9.2.4
Timer Interrupt Status Register A (TISRA) ......................................................... 292
9.2.5
Timer Interrupt Status Register B (TISRB).......................................................... 295
9.2.6
Timer Interrupt Status Register C (TISRC) ......................................................... 298
9.2.7
Timer Counters (16TCNT)................................................................................... 300
9.2.8
General Registers (GRA, GRB) ........................................................................... 301
9.2.9
Timer Control Registers (16TCR)........................................................................ 302
9.2.10 Timer I/O Control Register (TIOR) ..................................................................... 304
9.2.11 Timer Output Level Setting Register C (TOLR).................................................. 306
9.3
CPU Interface .................................................................................................................... 309
9.3.1
16-Bit Accessible Registers.................................................................................. 309
9.3.2
8-Bit Accessible Registers.................................................................................... 311
9.4
Operation ........................................................................................................................... 312
9.4.1
Overview .............................................................................................................. 312
9.4.2
Basic Functions .................................................................................................... 312
9.4.3
Synchronization.................................................................................................... 322
9.4.4
PWM Mode .......................................................................................................... 324
9.4.5
Phase Counting Mode .......................................................................................... 328

vii
9.4.6
Setting Initial Value of 16-Bit Timer Output ....................................................... 330
9.5
Interrupts............................................................................................................................ 331
9.5.1
Setting of Status Flags.......................................................................................... 331
9.5.2
Timing of Clearing of Status Flags ...................................................................... 333
9.5.3
Interrupt Sources and DMA Controller Activation.............................................. 334
9.6
Usage Notes ....................................................................................................................... 335
Section 10 8-Bit Timers
..................................................................................................... 347
10.1
Overview............................................................................................................................ 347
10.1.1 Features ................................................................................................................ 347
10.1.2 Block Diagram...................................................................................................... 349
10.1.3 Pin Configuration ................................................................................................. 350
10.1.4 Register Configuration ......................................................................................... 351
10.2
Register Descriptions......................................................................................................... 352
10.2.1 Timer Counters (8TCNT)..................................................................................... 352
10.2.2 Time Constant Registers A (TCORA) ................................................................. 353
10.2.3 Time Constant Registers B (TCORB).................................................................. 354
10.2.4 Timer Control Register (8TCR) ........................................................................... 354
10.2.5 Timer Control/Status Registers (8TCSR) ............................................................ 357
10.3
CPU Interface .................................................................................................................... 361
10.3.1 8-Bit Registers...................................................................................................... 361
10.4
Operation ........................................................................................................................... 363
10.4.1 8TCNT Count Timing .......................................................................................... 363
10.4.2 Compare Match Timing ....................................................................................... 364
10.4.3 Input Capture Signal Timing................................................................................ 365
10.4.4 Timing of Status Flag Setting............................................................................... 366
10.4.5 Operation with Cascaded Connection .................................................................. 367
10.4.6 Input Capture Setting............................................................................................ 369
10.5
Interrupt ............................................................................................................................. 371
10.5.1 Interrupt Source.................................................................................................... 371
10.5.2 A/D Converter Activation .................................................................................... 372
10.6
8-Bit Timer Application Example ..................................................................................... 372
10.7
Usage Notes ....................................................................................................................... 373
10.7.1 Contention between 8TCNT Write and Clear...................................................... 373
10.7.2 Contention between 8TCNT Write and Increment .............................................. 374
10.7.3 Contention between TCOR Write and Compare Match ...................................... 375
10.7.4 Contention between TCOR Read and Input Capture ........................................... 376
10.7.5 Contention between Counter Clearing by Input Capture and Counter Increment 377
10.7.6 Contention between TCOR Write and Input Capture .......................................... 378
10.7.7 Contention between 8TCNT Byte Write and Increment in 16-Bit Count Mode
(Cascaded Connection)......................................................................................... 379
10.7.8 Contention between Compare Matches A and B ................................................. 380
10.7.9 8TCNT Operation at Internal Clock Source Switchover ..................................... 380

viii
Section 11 Programmable Timing Pattern Controller (TPC)
.................................. 383
11.1
Overview............................................................................................................................ 383
11.1.1 Features ................................................................................................................ 383
11.1.2 Block Diagram...................................................................................................... 384
11.1.3 Pin Configuration ................................................................................................. 385
11.1.4 Register Configuration ......................................................................................... 386
11.2
Register Descriptions......................................................................................................... 387
11.2.1 Port A Data Direction Register (PADDR) ........................................................... 387
11.2.2 Port A Data Register (PADR) .............................................................................. 387
11.2.3 Port B Data Direction Register (PBDDR)............................................................ 388
11.2.4 Port B Data Register (PBDR)............................................................................... 388
11.2.5 Next Data Register A (NDRA) ............................................................................ 389
11.2.6 Next Data Register B (NDRB) ............................................................................. 391
11.2.7 Next Data Enable Register A (NDERA).............................................................. 393
11.2.8 Next Data Enable Register B (NDERB) .............................................................. 394
11.2.9 TPC Output Control Register (TPCR) ................................................................. 395
11.2.10 TPC Output Mode Register (TPMR) ................................................................... 398
11.3
Operation ........................................................................................................................... 400
11.3.1 Overview .............................................................................................................. 400
11.3.2 Output Timing ...................................................................................................... 401
11.3.3 Normal TPC Output ............................................................................................. 402
11.3.4 Non-Overlapping TPC Output ............................................................................. 404
11.3.5 TPC Output Triggering by Input Capture ............................................................ 406
11.4
Usage Notes ....................................................................................................................... 407
11.4.1 Operation of TPC Output Pins.............................................................................. 407
11.4.2 Note on Non-Overlapping Output........................................................................ 407
Section 12 Watchdog Timer
............................................................................................. 409
12.1
Overview............................................................................................................................ 409
12.1.1 Features ................................................................................................................ 409
12.1.2 Block Diagram...................................................................................................... 410
12.1.3 Pin Configuration ................................................................................................. 410
12.1.4 Register Configuration ......................................................................................... 411
12.2
Register Descriptions......................................................................................................... 412
12.2.1 Timer Counter (TCNT) ........................................................................................ 412
12.2.2 Timer Control/Status Register (TCSR) ................................................................ 413
12.2.3 Reset Control/Status Register (RSTCSR) ............................................................ 415
12.2.4 Notes on Register Access ..................................................................................... 417
12.3
Operation ........................................................................................................................... 419
12.3.1 Watchdog Timer Operation.................................................................................. 419
12.3.2 Interval Timer Operation...................................................................................... 420
12.3.3 Timing of Setting of Overflow Flag (OVF) ......................................................... 421
12.3.4 Timing of Setting of Watchdog Timer Reset Bit (WRST) .................................. 422

ix
12.4
Interrupts............................................................................................................................ 423
12.5
Usage Notes ....................................................................................................................... 423
Section 13 Serial Communication Interface
................................................................ 425
13.1
Overview............................................................................................................................ 425
13.1.1 Features ................................................................................................................ 425
13.1.2 Block Diagram...................................................................................................... 427
13.1.3 Pin Configuration ................................................................................................. 428
13.1.4 Register Configuration ......................................................................................... 429
13.2
Register Descriptions......................................................................................................... 430
13.2.1 Receive Shift Register (RSR) ............................................................................... 430
13.2.2 Receive Data Register (RDR) .............................................................................. 430
13.2.3 Transmit Shift Register (TSR).............................................................................. 431
13.2.4 Transmit Data Register (TDR) ............................................................................. 431
13.2.5 Serial Mode Register (SMR)................................................................................ 432
13.2.6 Serial Control Register (SCR).............................................................................. 436
13.2.7 Serial Status Register (SSR) ................................................................................. 440
13.2.8 Bit Rate Register (BRR) ....................................................................................... 446
13.3
Operation ........................................................................................................................... 455
13.3.1 Overview .............................................................................................................. 455
13.3.2 Operation in Asynchronous Mode........................................................................ 457
13.3.3 Multiprocessor Communication ........................................................................... 467
13.3.4 Synchronous Operation ........................................................................................ 473
13.4
SCI Interrupts .................................................................................................................... 482
13.5
Usage Notes ....................................................................................................................... 483
13.5.1 Notes on Use of SCI ............................................................................................. 483
Section 14 Smart Card Interface
...................................................................................... 489
14.1
Overview............................................................................................................................ 489
14.1.1 Features ................................................................................................................ 489
14.1.2 Block Diagram...................................................................................................... 490
14.1.3 Pin Configuration ................................................................................................. 490
14.1.4 Register Configuration ......................................................................................... 491
14.2
Register Descriptions......................................................................................................... 492
14.2.1 Smart Card Mode Register (SCMR) .................................................................... 492
14.2.2 Serial Status Register (SSR) ................................................................................. 494
14.2.3 Serial Mode Register (SMR)................................................................................ 496
14.2.4 Serial Control Register (SCR).............................................................................. 496
14.3
Operation ........................................................................................................................... 497
14.3.1 Overview .............................................................................................................. 497
14.3.2 Pin Connections.................................................................................................... 498
14.3.3 Data Format.......................................................................................................... 498
14.3.4 Register Settings ................................................................................................... 500

x
14.3.5 Clock .................................................................................................................... 502
14.3.6 Transmitting and Receiving Data ......................................................................... 504
14.4
Usage Notes ....................................................................................................................... 512
Section 15 A/D Converter
................................................................................................. 515
15.1
Overview............................................................................................................................ 515
15.1.1 Features ................................................................................................................ 515
15.1.2 Block Diagram...................................................................................................... 516
15.1.3 Pin Configuration ................................................................................................. 517
15.1.4 Register Configuration ......................................................................................... 518
15.2
Register Descriptions......................................................................................................... 519
15.2.1 A/D Data Registers A to D (ADDRA to ADDRD).............................................. 519
15.2.2 A/D Control/Status Register (ADCSR)................................................................ 520
15.2.3 A/D Control Register (ADCR) ............................................................................. 523
15.3
CPU Interface .................................................................................................................... 524
15.4
Operation ........................................................................................................................... 525
15.4.1 Single Mode (SCAN = 0) ..................................................................................... 525
15.4.2 Scan Mode (SCAN = 1) ....................................................................................... 527
15.4.3 Input Sampling and A/D Conversion Time.......................................................... 529
15.4.4 External Trigger Input Timing ............................................................................. 530
15.5
Interrupts............................................................................................................................ 531
15.6
Usage Notes ....................................................................................................................... 531
Section 16 D/A Converter
................................................................................................. 537
16.1
Overview............................................................................................................................ 537
16.1.1 Features ................................................................................................................ 537
16.1.2 Block Diagram...................................................................................................... 537
16.1.3 Pin Configuration ................................................................................................. 538
16.1.4 Register Configuration ......................................................................................... 538
16.2
Register Descriptions......................................................................................................... 539
16.2.1 D/A Data Registers 0 and 1 (DADR0/1).............................................................. 539
16.2.2 D/A Control Register (DACR) ............................................................................. 539
16.2.3 D/A Standby Control Register (DASTCR) .......................................................... 541
16.3
Operation ........................................................................................................................... 542
16.4
D/A Output Control ........................................................................................................... 544
Section 17 RAM
................................................................................................................... 545
17.1
Overview............................................................................................................................ 545
17.1.1 Block Diagram...................................................................................................... 545
17.1.2 Register Configuration ......................................................................................... 546
17.2
System Control Register (SYSCR).................................................................................... 547
17.3
Operation ........................................................................................................................... 548

xi
Section 18 Clock Pulse Generator
.................................................................................. 549
18.1
Overview............................................................................................................................ 549
18.1.1 Block Diagram...................................................................................................... 549
18.2
Oscillator Circuit ............................................................................................................... 550
18.2.1 Connecting a Crystal Resonator ........................................................................... 550
18.2.2 External Clock Input ............................................................................................ 552
18.3
Duty Adjustment Circuit.................................................................................................... 555
18.4
Prescalers ........................................................................................................................... 555
18.5
Frequency Divider ............................................................................................................. 555
18.5.1 Register Configuration ......................................................................................... 555
18.5.2 Division Control Register (DIVCR) .................................................................... 555
18.5.3 Usage Notes.......................................................................................................... 556
Section 19 Power-Down State
.......................................................................................... 557
19.1
Overview............................................................................................................................ 557
19.2
Register Configuration ...................................................................................................... 559
19.2.1 System Control Register (SYSCR) ...................................................................... 559
19.2.2 Module Standby Control RegisterH (MSTCRH) ................................................. 561
19.2.3 Module Standby Control Register L (MSTCRL) ................................................. 562
19.3
Sleep Mode ........................................................................................................................ 564
19.3.1 Transition to Sleep Mode ..................................................................................... 564
19.3.2 Exit from Sleep Mode .......................................................................................... 564
19.4
Software Standby Mode .................................................................................................... 565
19.4.1 Transition to Software Standby Mode.................................................................. 565
19.4.2 Exit from Software Standby Mode....................................................................... 565
19.4.3 Selection of Waiting Time for Exit from Software Standby Mode...................... 566
19.4.4 Sample Application of Software Standby Mode.................................................. 567
19.4.5 Note ...................................................................................................................... 567
19.5
Hardware Standby Mode ................................................................................................... 568
19.5.1 Transition to Hardware Standby Mode ................................................................ 568
19.5.2 Exit from Hardware Standby Mode ..................................................................... 568
19.5.3 Timing for Hardware Standby Mode ................................................................... 568
19.6
Module Standby Function.................................................................................................. 569
19.6.1 Module Standby Timing....................................................................................... 569
19.6.2 Read/Write in Module Standby............................................................................ 569
19.6.3 Usage Notes.......................................................................................................... 569
19.7
System Clock Output Disabling Function ......................................................................... 570
Section 20 Electrical Characteristics
.............................................................................. 571
20.1 Absolute Maximum Ratings.............................................................................................. 571
20.2 Electrical
Characteristics ................................................................................................... 572
20.2.1 DC
Characteristics................................................................................................ 572

xii
20.2.2 AC
Characteristics................................................................................................ 582
20.2.3 A/D Conversion Characteristics ........................................................................... 590
20.2.4 D/A Conversion Characteristics ........................................................................... 592
20.3 Operational
Timing............................................................................................................ 593
20.3.1 Clock
Timing........................................................................................................ 593
20.3.2 Control Signal Timing.......................................................................................... 594
20.3.3 Bus
Timing ........................................................................................................... 596
20.3.4 DRAM Interface Bus Timing ............................................................................... 602
20.3.5 TPC and I/O Port Timing ..................................................................................... 605
20.3.6 Timer Input/Output Timing.................................................................................. 606
20.3.7 SCI Input/Output Timing ..................................................................................... 607
20.3.8 DMAC
Timing ..................................................................................................... 608
Appendix A Instruction Set
............................................................................................... 609
A.1 Instruction
List................................................................................................................... 609
A.2
Operation Code Map ........................................................................................................ 624
A.3
Number of States Required for Execution......................................................................... 627
Appendix B Internal I/O Registers
.................................................................................. 636
B.1 Addresses........................................................................................................................... 636
B.2 Functions............................................................................................................................ 645
Appendix C I/O Port Block Diagrams
........................................................................... 729
C.1
Port 4 Block Diagram ........................................................................................................ 729
C.2
Port 6 Block Diagrams ...................................................................................................... 730
C.3
Port 7 Block Diagrams ...................................................................................................... 734
C.4
Port 8 Block Diagrams ...................................................................................................... 735
C.5
Port 9 Block Diagrams ...................................................................................................... 739
C.6
Port A Block Diagrams...................................................................................................... 745
C.7
Port B Block Diagrams...................................................................................................... 748
Appendix D Pin States
........................................................................................................ 754
D.1
Port States in Each Mode .................................................................................................. 754
D.2
Pin States at Reset.............................................................................................................. 760
Appendix E Timing of Transition to and Recovery from Hardware
Standby Mode
............................................................................................... 762
Appendix F
List of Product Codes
................................................................................. 763
Appendix G Package Dimensions
................................................................................... 764

xiii
Appendix H Comparison of H8/300H Series Product Specifications
.................. 767
H.1
Differences between H8/3067 and H8/3062 Series, H8/3048 Series,
H8/3007 and H8/3006, and H8/3002................................................................................. 767
H.2
Comparison of Pin Functions of 100-Pin Package Products (FP-100B, TFP-100B) ....... 770
1
Section 1 Overview
1.1
Overview
The H8/3006 and H8/3007 are a series of microcontrollers (MCUs) that integrate system
supporting functions together with an H8/300H CPU core having an original Hitachi architecture.
The H8/300H CPU has a 32-bit internal architecture with sixteen 16-bit general registers, and a
concise, optimized instruction set designed for speed. It can address a 16-Mbyte linear address
space. Its instruction set is upward-compatible at the object-code level with the H8/300 CPU,
enabling easy porting of software from the H8/300 Series.
The on-chip system supporting functions include RAM, a 16-bit timer, an 8-bit timer, a
programmable timing pattern controller (TPC), a watchdog timer (WDT), a serial communication
interface (SCI), an A/D converter, a D/A converter, I/O ports, a direct memory access controller
(DMAC), and other facilities.
Four MCU operating modes offer a choice of bus width and address space size.
Table 1-1 summarizes the features of the H8/3006 and H8/3007.
Table 1-1
Features
Feature
Description
CPU
Upward-compatible with the H8/300 CPU at the object-code level
General-register machine
∑
Sixteen 16-bit general registers
(also usable as sixteen 8-bit registers plus eight 16-bit registers, or as eight
32-bit registers)
High-speed operation
∑
Maximum clock rate: 20 MHz
∑
Add/subtract: 100 ns
∑
Multiply/divide: 700 ns
16-Mbyte address space
Instruction features
∑
8/16/32-bit data transfer, arithmetic, and logic instructions
∑
Signed and unsigned multiply instructions (8 bits x 8 bits, 16 bits x 16 bits)
∑
Signed and unsigned divide instructions (16 bits ˜ 8 bits, 32 bits ˜ 16 bits)
∑
Bit accumulator function
∑
Bit manipulation instructions with register-indirect specification of bit positions

2
Feature
Description
Memory
H8/3007
∑
RAM: 4 kbytes
H8/3006
∑
RAM: 2 kbytes
Interrupt
controller
∑
Seven external interrupt pins: NMI,
IRQ
0
to
IRQ
5
∑
36 internal interrupts
∑
Three selectable interrupt priority levels
Bus controller
∑
Address space can be partitioned into eight areas, with independent bus
specifications in each area
∑
Chip select output available for areas 0 to 7
∑
8-bit access or 16-bit access selectable for each area
∑
Two-state or three-state access selectable for each area
∑
Selection of two wait modes
∑
Number of program wait states selectable for each area
∑
Direct connection of burst ROM
∑
Direct connection of up to 8-Mbyte DRAM (or DRAM interface can be used
as interval timer)
∑
Bus arbitration function
DMA controller
(DMAC)
Short address mode
∑
Maximum four channels available
∑
Selection of I/O mode, idle mode, or repeat mode
∑
Can be activated by compare match/input capture A interrupts from 16-bit
timer channels 0 to 2, conversion-end interrupts from the A/D converter,
transmit-data-empty and receive-data-full interrupts from the SCI, or external
requests
Full address mode
∑
Maximum two channels available
∑
Selection of normal mode or block transfer mode
∑
Can be activated by compare match/input capture A interrupts from 16-bit
timer channels 0 to 2, conversion-end interrupts from the A/D converter,
external requests, or auto-request
3
Feature
Description
16-bit timer,
3 channels
∑
Three 16-bit timer channels, capable of processing up to six pulse outputs or
six pulse inputs
∑
16-bit timer counter (channels 0 to 2)
∑
Two multiplexed output compare/input capture pins (channels 0 to 2)
∑
Operation can be synchronized (channels 0 to 2)
∑
PWM mode available (channels 0 to 2)
∑
Phase counting mode available (channel 2)
∑
DMAC can be activated by compare match/input capture A interrupts
(channels 0 to 2)
8-bit timer,
4 channels
∑
8-bit up-counter (external event count capability)
∑
Two time constant registers
∑
Two channels can be connected
Programmable
timing pattern
controller (TPC)
∑
Maximum 16-bit pulse output, using 16-bit timer as time base
∑
Up to four 4-bit pulse output groups (or one 16-bit group, or two 8-bit groups)
∑
Non-overlap mode available
∑
Output data can be transferred by DMAC
Watchdog
timer (WDT),
1 channel
∑
Internal reset signal can be generated by overflow
∑
Reset signal can be output externally
∑
Usable as an interval timer
Serial
communication
interface (SCI),
3 channels
∑
Selection of asynchronous or synchronous mode
∑
Full duplex: can transmit and receive simultaneously
∑
On-chip baud-rate generator
∑
Smart card interface functions added
A/D converter
∑
Resolution: 10 bits
∑
Eight channels, with selection of single or scan mode
∑
Variable analog conversion voltage range
∑
Sample-and-hold function
∑
A/D conversion can be started by an external trigger or 8-bit timer compare-
match
∑
DMAC can be activated by an A/D conversion end interrupt
D/A converter
∑
Resolution: 8 bits
∑
Two channels
∑
D/A outputs can be sustained in software standby mode
I/O ports
∑
35 input/output pins
∑
12 input-only pins

4
Feature
Description
Operating
Four MCU operating modes
modes
Mode
Address Space Address Pins Initial Bus Width Max. Bus Width
Mode 1
1 Mbyte
A
19
to A
0
8 bits
16 bits
Mode 2
1 Mbyte
A
19
to A
0
16 bits
16 bits
Mode 3
16 Mbytes
A
23
to A
0
8 bits
16 bits
Mode 4
16 Mbytes
A
23
to A
0
16 bits
16 bits
Power-down
state
∑
Sleep mode
∑
Software standby mode
∑
Hardware standby mode
∑
Module standby function
∑
Programmable system clock frequency division
Other features
∑
On-chip clock pulse generator
Product lineup
Product Name
Model
Package
H8/3007
5 V ± 10%
HD6413007F
100-pin QFP (FP-100B)
(5 V)
HD6413007TE
100-pin TQFP (TFP-100B)
HD6413007FP
100-pin QFP (FP-100A)
2.7 to 5.5 V HD6413007VF
100-pin QFP (FP-100B)
(Low
HD6413007VTE
100-pin TQFP (TFP-100B)
voltage)
HD6413007VFP
100-pin QFP (FP-100A)
H8/3006
5 V ± 10%
HD6413006F
100-pin QFP (FP-100B)
(5 V)
HD6413006TE
100-pin TQFP (TFP-100B)
HD6413006FP
100-pin QFP (FP-100A)
2.7 to 5.5 V HD6413006VF
100-pin QFP (FP-100B)
(Low
HD6413006VTE
100-pin TQFP (TFP-100B)
voltage)
HD6413006VFP
100-pin QFP (FP-100A)
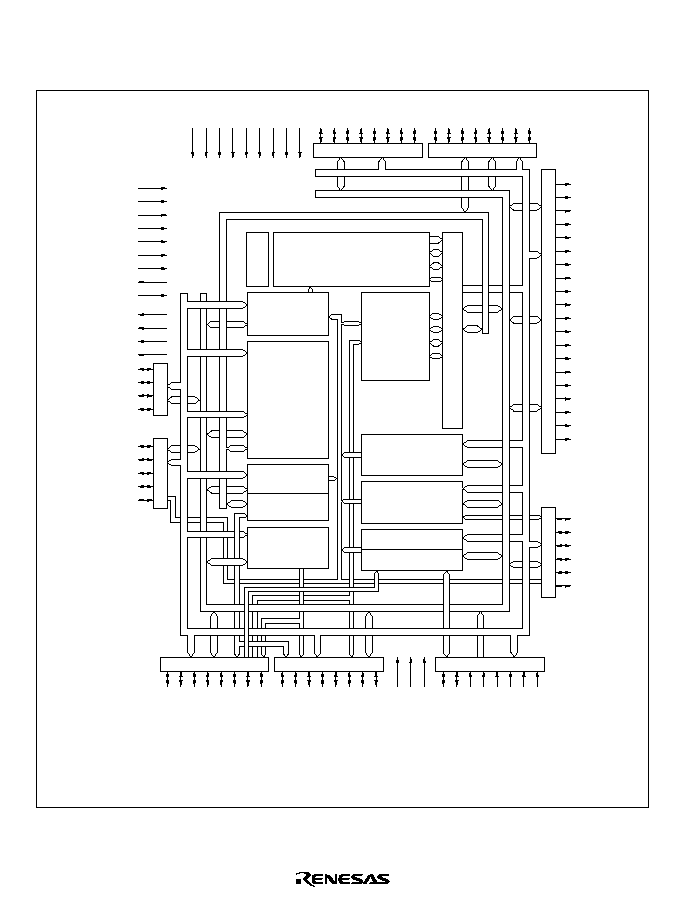
5
1.2
Internal Block Diagram
Figure 1-1 shows an internal block diagram.
V
V
V
V
V
V
V
V
V
CC
CC
CC
SS
SS
SS
SS
SS
SS
D
15
D
14
D
13
D
12
D
11
D
10
D
9
D
8
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
Data bus
Port 4
Port 9
A
19
A
18
A
17
A
16
A
15
A
14
A
13
A
12
A
11
A
10
A
9
A
8
A
7
A
6
A
5
A
4
A
3
A
2
A
1
A
0
P9 /SCK /
IRQ
P9 /SCK /
IRQ
P9 /RxD
P9 /RxD
P9 /TxD
P9 /TxD
5
4
3
2
1
0
1
0
1
0
1
0
5
4
DA
1
/AN
7
/P7
7
DA
0
/AN
6
/P7
6
AN
5
/P7
5
AN
4
/P7
4
AN
3
/P7
3
AN
2
/P7
2
AN
1
/P7
1
AN
0
/P7
0
Port 7
A
20
/TIOCB
2
/TP
7
/PA
7
A
21
/TIOCA
2
/TP
6
/PA
6
A
22
/TIOCB
1
/TP
5
/PA
5
A
23
/TIOCA
1
/TP
4
/PA
4
TCLKD/TIOCB
0
/TP
3
/PA
3
TCLKC/TIOCA
0
/TP
2
/PA
2
TEND
1
/TCLKB/TP
1
/PA
1
TEND
0
/TCLKA/TP
0
/PA
0
Port A
RxD
2
/TP
15
/PB
7
TxD
2
/TP
14
/PB
6
SCK
2
/
LCAS
/TP
13
/PB
5
UCAS
/TP
12
/PB
4
CS
4
/
DREQ
1
/TMIO
3
/TP
11
/PB
3
CS
5
/TMO
2
/TP
10
/PB
2
CS
6
/
DREQ
0
/TMIO
1
/TP
9
/PB
1
CS
7
/TMO
0
/TP
8
/PB
0
Port 8
CS
0
/P8
4
ADTRG
/
CS
1
/
IRQ
3
/P8
3
CS
2
/
IRQ
2
/P8
2
CS
3
/
IRQ
1
/P8
1
RFSH
/
IRQ
0
/P8
0
MD
2
MD
1
MD
0
EXTAL
XTAL
STBY
RES
RESO
NMI
H8/300H CPU
Clock pulse
generator
Interrupt controller
DMA controller
(DMAC)
Serial communication
interface
(SCI) 3 channels
◊
Watchdog timer
(WDT)
Address bus
Data bus (upper)
Data bus (lower)
Address bus
AS
RD
HWR
LWR
/P6
7
BACK
/P6
2
BREQ
/P6
1
WAIT
/P6
0
RAM
16-bit timer unit
8-bit timer unit
A/D converter
D/A converter
Port 6
Bus controller
Programmable
timing pattern
controller (TPC)
Port B
V
REF
AV
CC
AV
SS
Figure 1-1 Block Diagram
6
1.3
Pin Description
1.3.1
Pin Arrangement
The pin arrangement of the H8/3006, H8/3007 FP-100B and TFP-100B packages is shown in
figure 1-2, and that of the FP-100A package in figure 1-3.
V
CC
CS
7
/TMO
0
/TP
8
/PB
0
CS
6
/
DREQ
0
/TMIO
1
/TP
9
/PB
1
CS
5
/TMO
2
/TP
10
/PB
2
CS
4
/
DREQ
1
/TMIO
3
/TP
11
/PB
3
UCAS
/TP
12
/PB
4
SCK
2
/
LCAS
/TP
13
/PB
5
TxD
2
/TP
14
/PB
6
RxD
2
/TP
15
/PB
7
0
1
2
3
4
5
0
1
2
3
4
5
6
RESO
V
SS
TxD /P9
TxD /P9
RxD /P9
RxD /P9
IRQ
/SCK /P9
IRQ
/SCK /P9
D /P4
D /P4
D /P4
D /P4
D /P4
D /P4
D /P4
MD
MD
MD
LWR
HWR
RD
AS
V
XT
AL
EXT
AL
V
NMI
RES
STBY
P6
7
/
P6 /
BACK
P6 /
BRE
Q
P6 /
WAIT
V
A
19
A
18
A
17
A
16
A
15
A
14
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
A
13
A
12
A
11
A
10
A
9
A
8
V
SS
A
7
A
6
A
5
A
4
A
3
A
2
A
1
A
0
V
CC
D
15
D
14
D
13
D
12
D
11
D
10
D
9
D
8
D
7
/P4
7
0
1
0
1
0
1
0
1
2
3
4
5
6
4
5
2
1
0
2
1
0
CC
SS
SS
V
SS
Top view
(FP-100B, TFP-100B)
INDEX
AV
CC
V
REF
P7
0
/AN
0
P7
1
/AN
1
P7
2
/AN
2
P7
3
/AN
3
P7
4
/AN
4
P7
5
/AN
5
P7
6
/AN
6
/DA
0
P7
7
/AN
7
/DA
1
AV
SS
P8
0
/
IRQ
0
/
RFSH
P8
1
/
IRQ
1
/
CS
3
P8
2
/
IRQ
2
/
CS
2
P8
3
/
IRQ
3
/
CS
1
/
ADTRG
P8
4
/
CS
0
V
SS
PA
0
/TP
0
/TCLKA/
TEND
0
PA
1
/TP
1
/TCLKB/
TEND
1
PA
2
/TP
2
/TIOCA
0
/TCLKC
PA
3
/TP
3
/TIOCB
0
/TCLKD
PA
4
/TP
4
/TIOCA
1
/A
23
PA
5
/TP
5
/TIOCB
1
/A
22
PA
6
/TP
6
/TIOCA
2
/A
21
PA
7
/TP
7
/TIOCB
2
/A
20
Figure 1-2 Pin Arrangement (FP-100B or TFP-100B, Top View)
7
P7
0
/AN
0
V
REF
AV
CC
MD
2
MD
1
MD
0
LWR
HWR
RD
AS
V
CC
XTAL
EXTAL
V
SS
NMI
RES
STBY
P6
7
/
P6
2
/
BACK
P6
1
/
BREQ
P6
0
/
WAIT
V
SS
A
19
A
18
A
17
A
16
A
15
A
14
A
13
A
12
A /TIOCA /TP /PA
A /TIOCB /TP /PA
CS
/TMO /TP /PB
CS
/
DREQ
/TMIO /TP /PB
CS
/TMO /TP /PB
CS
/
DREQ
/TMIO /TP /PB
UCAS
/TP /PB
SCK /
LCAS
/TP /PB
TxD /TP /PB
RxD /TP /PB
RESO
TxD /P9
TxD /P9
RxD /P9
RxD /P9
IRQ
/SCK /P9
IRQ
/SCK /P9
D /P4
D /P4
D /P4
D /P4
D
4
/P4
4
D
5
/P4
5
D
6
/P4
6
D
7
/P4
7
D
8
D
9
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
21
26
6
20
27
7
08
0
19
1
4
11
3
1
3
2
2
15
7
2
4
12
5
13
6
14
6
7
21
0
2
5
0
SS
0
1
0
1
40
4
51
5
0
1
0
1
2
3
0
1
2
3
2
3
V
CC
V
SS
80
79
78
77
76
V
Top view
(FP-100A)
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
A
11
A
10
A
9
A
8
V
SS
A
7
A
6
A
5
A
4
A
3
A
2
A
1
A
0
V
CC
D
15
D
14
D
13
D
12
D
11
D
10
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
P7
1
/AN
1
P7
2
/AN
2
P7
3
/AN
3
P7
4
/AN
4
P7
5
/AN
5
P7
6
/AN
6
/DA
0
P7
7
/AN
7
/DA
1
AV
SS
P8
0
/
IRQ
0
/
RFSH
P8
1
/
IRQ
1
/
CS
3
P8
2
/
IRQ
2
/
CS
2
P8
3
/
IRQ
3
/
CS
1
/
ADTRG
P8
4
/
CS
0
V
SS
PA
0
/TP
0
/TCLKA/
TEND
0
PA
1
/TP
1
/TCLKB/
TEND
1
PA
2
/TP
2
/TIOCA
0
/TCLKC
PA
3
/TP
3
/TIOCB
0
/TCLKD
PA
4
/TP
4
/TIOCA
1
/A
23
PA
5
/TP
5
/TIOCB
1
/A
22
Figure 1-3 Pin Arrangement (FP-100A, Top View)

8
1.3.2
Pin Functions
Table 1-2 summarizes the pin functions.
Table 1-2
Pin Functions
Pin No.
Type
Symbol
FP-100B
TFP-100B FP-100A I/O
Name and Function
Power
V
CC
1, 35, 68
3, 37, 70 Input
Power: For connection to the power supply.
Connect all V
CC
pins to the system power
supply.
V
SS
11, 22,
44, 57,
65, 92
13, 24,
46, 59,
67, 94
Input
Ground: For connection to ground (0 V).
Connect all V
SS
pins to the 0-V system power
supply.
Clock
XTAL
67
69
Input
For connection to a crystal resonator.
For examples of crystal resonator and external
clock input, see section 18, Clock Pulse
Generator.
EXTAL
66
68
Input
For connection to a crystal resonator or input
of an external clock signal. For examples of
crystal resonator and external clock input, see
section 18, Clock Pulse Generator.
61
63
Output System clock: Supplies the system clock to
external devices.
Operating
mode
control
MD
2
to
MD
0
75 to 73
77 to 75 Input
Mode 2 to mode 0: For setting the operating
mode, as follows. Inputs at these pins must
not be changed during operation.
MD
2
MD
1
MD
0
Operating Mode
0
0
0
--
0
0
1
Mode 1
0
1
0
Mode 2
0
1
1
Mode 3
1
0
0
Mode 4
1
0
1
--
1
1
0
--
1
1
1
--
9
Pin No.
Type
Symbol
FP-100B
TFP-100B FP-100A I/O
Name and Function
System
control
RES
63
65
Input
Reset input: When driven low, this pin resets
the chip
RESO
10
12
Output Reset output: Outputs the reset signal
generated by the watchdog timer to external
devices
STBY
62
64
Input
Standby: When driven low, this pin forces
a transition to hardware standby mode
BREQ
59
61
Input
Bus request: Used by an external bus master
to request the bus right
BACK
60
62
Output Bus request acknowledge: Indicates that the
bus has been granted to an external bus
master
Interrupts NMI
64
66
Input
Nonmaskable interrupt: Requests a
nonmaskable interrupt
IRQ
5
to
IRQ
0
17, 16,
90 to 87
19, 18,
92 to 89
Input
Interrupt request 5 to 0: Maskable interrupt
request pins
Address
bus
A
23
to A
0
100 to 97,
56 to 45,
43 to 36
99, 100,
1, 2,
58 to 47,
45 to 38
Output Address bus: Outputs address signals
Data bus
D
15
to D
0
34 to 23,
21 to 18
36 to 25,
23 to 20
Input/
output
Data bus: Bidirectional data bus
Bus
control
CS
7
to
CS
0
2 to 5,
88 to 91
4 to 7,
90 to 93
Output Chip select: Select signals for areas 7 to 0
AS
69
71
Output Address strobe: Goes low to indicate valid
address output on the address bus
RD
70
72
Output Read: Goes low to indicate reading from the
external address space
HWR
71
73
Output High write: Goes low to indicate writing to the
external address space; indicates valid data
on the upper data bus (D
15
to D
8
).
LWR
72
74
Output Low write: Goes low to indicate writing to the
external address space; indicates valid data
on the lower data bus (D
7
to D
0
).
WAIT
58
60
Input
Wait: Requests insertion of wait states in bus
cycles during access to the external address
space
10
Pin No.
Type
Symbol
FP-100B
TFP-100B FP-100A I/O
Name and Function
DRAM
RFSH
87
89
Output Refresh: Indicates a refresh cycle
interface
CS
2
to
CS
5
89, 88, 5,
4
91, 90,
7, 6
Output Row address strobe
RAS
: Row address
strobe signal for DRAM
RD
70
72
Output Write enable
WE
: Write enable signal for
DRAM
HWR
UCAS
71
6
73
8
Output Upper column address strobe
UCAS
:
Column address strobe signal for DRAM
LWR
LCAS
72
7
74
9
Output Lower column address strobe
LCAS
:
Column address strobe signal for DRAM
DMA
controller
DREQ
1
,
DREQ
0
5, 3
7, 5
Input
DMA request 1 and 0: DMAC activation
requests
(DMAC)
TEND
1
,
TEND
0
94, 93
96, 95
Output Transfer end 1 and 0: These signals indicate
that the DMAC has ended a data transfer
16-bit
timer
TCLKD to
TCLKA
96 to 93
98 to95
Input
Clock input D to A: External clock inputs
TIOCA
2
to
TIOCA
0
99, 97, 95 1, 99, 97 Input/
output
Input capture/output compare A2 to A0:
GRA2 to GRA0 output compare or input
capture, or PWM output
TIOCB
2
to
TIOCB
0
100, 98,
96
2, 100,
98
Input/
output
Input capture/output compare B2 to B0:
GRB2 to GRB0 output compare or input
capture, or PWM output
8-bit timer TMO
0
,
TMO
2
2, 4
4, 6
Output Compare match output: Compare match
output pins
TMIO
1
,
TMIO
3
3, 5
5, 7
Input/
output
Input capture input/compare match output:
Input capture input or compare match output
pins
TCLKD to
TCLKA
96 to 93
98 to 95 Input
Counter external clock input: These pins
input an external clock to the counters.

11
Pin No.
Type
Symbol
FP-100B
TFP-100B FP-100A I/O
Name and Function
Program-
mable
timing
pattern
controller
(TPC)
TP
15
to
TP
0
9 to 2,
100 to 93
11 to 4,
2, 1,
100 to
95
Output TPC output 15 to 0: Pulse output
Serial
communi-
TxD
2
to
TxD
0
8, 13, 12
10, 15,
14
Output Transmit data (channels 0, 1, 2): SCI data
output
cation
interface
RxD
2
to
RxD
0
9, 15, 14
11, 17,
16
Input
Receive data (channels 0, 1, 2): SCI data
input
(SCI)
SCK
2
to
SCK
0
7, 17, 16
9, 19, 18 Input/
output
Serial clock (channels 0, 1, 2): SCI clock
input/output
A/D
converter
AN
7
to
AN
0
85 to 78
87 to 80 Input
Analog 7 to 0: Analog input pins
ADTRG
90
92
Input
A/D conversion external trigger input:
External trigger input for starting A/D
conversion
D/A
converter
DA
1
, DA
0
85, 84
87, 86
Output Analog output: Analog output from the
D/A converter
A/D and
D/A
converters
AV
CC
76
78
Input
Power supply pin for the A/D and
D/A converters. Connect to the system power
supply when not using the A/D and
D/A converters.
AV
SS
86
88
Input
Ground pin for the A/D and D/A converters.
Connect to system ground (0 V).
V
REF
77
79
Input
Reference voltage input pin for the A/D and
D/A converters. Connect to the system power
supply when not using the A/D and
D/A converters.

12
Pin No.
Type
Symbol
FP-100B
TFP-100B FP-100A I/O
Name and Function
I/O ports
P4
7
to P4
0
26 to 23,
21 to 18
28 to 25,
23 to 20
Input/
output
Port 4: Eight input/output pins. The direction
of each pin can be selected in the port 4 data
direction register (P4DDR).
P6
7
,
P6
2
to P6
0
61 to 58
63 to 60 Input/
output
Port 6: Four input/output pins. The direction of
each pin can be selected in the port 6 data
direction register (P6DDR).
P7
7
to P7
0
85 to 78
87 to 80 Input
Port 7: Eight input pins
P8
4
to P8
0
91 to 87
93 to 89 Input/
output
Port 8: Five input/output pins. The direction of
each pin can be selected in the port 8 data
direction register (P8DDR).
P9
5
to P9
0
17 to 12
19 to 14 Input/
output
Port 9: Six input/output pins. The direction of
each pin can be selected in the port 9 data
direction register (P9DDR).
PA
7
to
PA
0
100 to 93 2, 1,
100 to
95
Input/
output
Port A: Eight input/output pins. The direction
of each pin can be selected in the port A data
direction register (PADDR).
PB
7
to
PB
0
9 to 2
11 to 4
Input/
output
Port B: Eight input/output pins. The direction
of each pin can be selected in the port B data
direction register (PBDDR).
13
1.3.3 Pin Assignments in Each Mode
Table 1-3 lists the pin assignments in each mode.
Table 1-3
Pin Assignments in Each Mode (FP-100B or TFP-100B, FP-100A)
Pin No.
Pin Name
FP-100B
TFP-100B
FP-100A
Mode 1
Mode 2
Mode 3
Mode 4
1
3
V
CC
V
CC
V
CC
V
CC
2
4
PB
0
/TP
8
/TMO
0
/
CS
7
PB
0
/TP
8
/TMO
0
/
CS
7
PB
0
/TP
8
/TMO
0
/
CS
7
PB
0
/TP
8
/TMO
0
/
CS
7
3
5
PB
1
/TP
9
/TMIO
1
/
DREQ
0
/
CS
6
PB
1
/TP
9
/TMIO
1
/
DREQ
0
/
CS
6
PB
1
/TP
9
/TMIO
1
/
DREQ
0
/
CS
6
PB
1
/TP
9
/TMIO
1
/
DREQ
0
/
CS
6
4
6
PB
2
/TP
10
/TMO
2
/
CS
5
PB
2
/TP
10
/TMO
2
/
CS
5
PB
2
/TP
10
/TMO
2
/
CS
5
PB
2
/TP
10
/TMO
2
/
CS
5
5
7
PB
3
/TP
11
/TMIO
3
/
DREQ
1
/
CS
4
PB
3
/TP
11
/TMIO
3
/
DREQ
1
/
CS
4
PB
3
/TP
11
/TMIO
3
/
DREQ
1
/
CS
4
PB
3
/TP
11
/TMIO
3
/
DREQ
1
/
CS
4
6
8
PB
4
/TP
12
/
UCAS
PB
4
/TP
12
/
UCAS
PB
4
/TP
12
/
UCAS
PB
4
/TP
12
/
UCAS
7
9
PB
5
/TP
13
/
LCAS
/
SCK
2
PB
5
/TP
13
/
LCAS
/
SCK
2
PB
5
/TP
13
/
LCAS
/
SCK
2
PB
5
/TP
13
/
LCAS
/
SCK
2
8
10
PB
6
/TP
14
/TxD
2
PB
6
/TP
14
/TxD
2
PB
6
/TP
14
/TxD
2
PB
6
/TP
14
/TxD
2
9
11
PB
7
/TP
15
/RxD
2
PB
7
/TP
15
/RxD
2
PB
7
/TP
15
/RxD
2
PB
7
/TP
15
/RxD
2
10
12
RESO
RESO
RESO
RESO
11
13
V
SS
V
SS
V
SS
V
SS
12
14
P9
0
/TxD
0
P9
0
/TxD
0
P9
0
/TxD
0
P9
0
/TxD
0
13
15
P9
1
/TxD
1
P9
1
/TxD
1
P9
1
/TxD
1
P9
1
/TxD
1
14
16
P9
2
/RxD
0
P9
2
/RxD
0
P9
2
/RxD
0
P9
2
/RxD
0
15
17
P9
3
/RxD
1
P9
3
/RxD
1
P9
3
/RxD
1
P9
3
/RxD
1
16
18
P9
4
/
IRQ
4
/SCK
0
P9
4
/
IRQ
4
/SCK
0
P9
4
/
IRQ
4
/SCK
0
P9
4
/
IRQ
4
/SCK
0
17
19
P9
5
/
IRQ
5
/SCK
1
P9
5
/
IRQ
5
/SCK
1
P9
5
/
IRQ
5
/SCK
1
P9
5
/
IRQ
5
/SCK
1
18
20
P4
0
/D
0
*
1
P4
0
/D
0
*
2
P4
0
/D
0
*
1
P4
0
/D
0
*
2
19
21
P4
1
/D
1
*
1
P4
1
/D
1
*
2
P4
1
/D
1
*
1
P4
1
/D
1
*
2
20
22
P4
2
/D
2
*
1
P4
2
/D
2
*
2
P4
2
/D
2
*
1
P4
2
/D
2
*
2
21
23
P4
3
/D
3
*
1
P4
3
/D
3
*
2
P4
3
/D
3
*
1
P4
3
/D
3
*
2
22
24
V
SS
V
SS
V
SS
V
SS
23
25
P4
4
/D
4
*
1
P4
4
/D
4
*
2
P4
4
/D
4
*
1
P4
4
/D
4
*
2

14
Pin No.
Pin Name
FP-100B
TFP-100B
FP-100A
Mode 1
Mode 2
Mode 3
Mode 4
24
26
P4
5
/D
5
*
1
P4
5
/D
5
*
2
P4
5
/D
5
*
1
P4
5
/D
5
*
2
25
27
P4
6
/D
6
*
1
P4
6
/D
6
*
2
P4
6
/D
6
*
1
P4
6
/D
6
*
2
26
28
P4
7
/D
7
*
1
P4
7
/D
7
*
2
P4
7
/D
7
*
1
P4
7
/D
7
*
2
27
29
D
8
D
8
D
8
D
8
28
30
D
9
D
9
D
9
D
9
29
31
D
10
D
10
D
10
D
10
30
32
D
11
D
11
D
11
D
11
31
33
D
12
D
12
D
12
D
12
32
34
D
13
D
13
D
13
D
13
33
35
D
14
D
14
D
14
D
14
34
36
D
15
D
15
D
15
D
15
35
37
V
CC
V
CC
V
CC
V
CC
36
38
A
0
A
0
A
0
A
0
37
39
A
1
A
1
A
1
A
1
38
40
A
2
A
2
A
2
A
2
39
41
A
3
A
3
A
3
A
3
40
42
A
4
A
4
A
4
A
4
41
43
A
5
A
5
A
5
A
5
42
44
A
6
A
6
A
6
A
6
43
45
A
7
A
7
A
7
A
7
44
46
V
SS
V
SS
V
SS
V
SS
45
47
A
8
A
8
A
8
A
8
46
48
A
9
A
9
A
9
A
9
47
49
A
10
A
10
A
10
A
10
48
50
A
11
A
11
A
11
A
11
49
51
A
12
A
12
A
12
A
12
50
52
A
13
A
13
A
13
A
13
51
53
A
14
A
14
A
14
A
14
52
54
A
15
A
15
A
15
A
15
53
55
A
16
A
16
A
16
A
16
54
56
A
17
A
17
A
17
A
17
15
Pin No.
Pin Name
FP-100B
TFP-100B
FP-100A
Mode 1
Mode 2
Mode 3
Mode 4
55
57
A
18
A
18
A
18
A
18
56
58
A
19
A
19
A
19
A
19
57
59
V
SS
V
SS
V
SS
V
SS
58
60
P6
0
/
WAIT
P6
0
/
WAIT
P6
0
/
WAIT
P6
0
/
WAIT
59
61
P6
1
/
BREQ
P6
1
/
BREQ
P6
1
/
BREQ
P6
1
/
BREQ
60
62
P6
2
/
BACK
P6
2
/
BACK
P6
2
/
BACK
P6
2
/
BACK
61
63
P6
7
/
P6
7
/
P6
7
/
P6
7
/
62
64
STBY
STBY
STBY
STBY
63
65
RES
RES
RES
RES
64
66
NMI
NMI
NMI
NMI
65
67
V
SS
V
SS
V
SS
V
SS
66
68
EXTAL
EXTAL
EXTAL
EXTAL
67
69
XTAL
XTAL
XTAL
XTAL
68
70
V
CC
V
CC
V
CC
V
CC
69
71
AS
AS
AS
AS
70
72
RD
RD
RD
RD
71
73
HWR
HWR
HWR
HWR
72
74
LWR
LWR
LWR
LWR
73
75
MD
0
MD
0
MD
0
MD
0
74
76
MD
1
MD
1
MD
1
MD
1
75
77
MD
2
MD
2
MD
2
MD
2
76
78
AV
CC
AV
CC
AV
CC
AV
CC
77
79
V
REF
V
REF
V
REF
V
REF
78
80
P7
0
/AN
0
P7
0
/AN
0
P7
0
/AN
0
P7
0
/AN
0
79
81
P7
1
/AN
1
P7
1
/AN
1
P7
1
/AN
1
P7
1
/AN
1
80
82
P7
2
/AN
2
P7
2
/AN
2
P7
2
/AN
2
P7
2
/AN
2
81
83
P7
3
/AN
3
P7
3
/AN
3
P7
3
/AN
3
P7
3
/AN
3
82
84
P7
4
/AN
4
P7
4
/AN
4
P7
4
/AN
4
P7
4
/AN
4
83
85
P7
5
/AN
5
P7
5
/AN
5
P7
5
/AN
5
P7
5
/AN
5
84
86
P7
6
/AN
6
/DA
0
P7
6
/AN
6
/DA
0
P7
6
/AN
6
/DA
0
P7
6
/AN
6
/DA
0
85
87
P7
7
/AN
7
/DA
1
P7
7
/AN
7
/DA
1
P7
7
/AN
7
/DA
1
P7
7
/AN
7
/DA
1
16
Pin No.
Pin Name
FP-100B
TFP-100B
FP-100A
Mode 1
Mode 2
Mode 3
Mode 4
86
88
AV
SS
AV
SS
AV
SS
AV
SS
87
89
P8
0
/
IRQ
0
/
RFSH
P8
0
/
IRQ
0
/
RFSH
P8
0
/
IRQ
0
/
RFSH
P8
0
/
IRQ
0
/
RFSH
88
90
P8
1
/
IRQ
1
/
CS
3
P8
1
/
IRQ
1
/
CS
3
P8
1
/
IRQ
1
/
CS
3
P8
1
/
IRQ
1
/
CS
3
89
91
P8
2
/
IRQ
2
/
CS
2
P8
2
/
IRQ
2
/
CS
2
P8
2
/
IRQ
2
/
CS
2
P8
2
/
IRQ
2
/
CS
2
90
92
P8
3
/
IRQ
3
/
CS
1
/
ADTRG
P8
3
/
IRQ
3
/
CS
1
/
ADTRG
P8
3
/
IRQ
3
/
CS
1
/
ADTRG
P8
3
/
IRQ
3
/
CS
1
/
ADTRG
91
93
P8
4
/
CS
0
P8
4
/
CS
0
P8
4
/
CS
0
P8
4
/
CS
0
92
94
V
SS
V
SS
V
SS
V
SS
93
95
PA
0
/TP
0
/TCLKA/
TEND
0
PA
0
/TP
0
/TCLKA/
TEND
0
PA
0
/TP
0
/TCLKA/
TEND
0
PA
0
/TP
0
/TCLKA/
TEND
0
94
96
PA
1
/TP
1
/TCLKB/
TEND
1
PA
1
/TP
1
/TCLKB/
TEND
1
PA
1
/TP
1
/TCLKB/
TEND
1
PA
1
/TP
1
/TCLKB/
TEND
1
95
97
PA
2
/TP
2
/TIOCA
0
/
TCLKC
PA
2
/TP
2
/TIOCA
0
/
TCLKC
PA
2
/TP
2
/TIOCA
0
/
TCLKC
PA
2
/TP
2
/TIOCA
0
/
TCLKC
96
98
PA
3
/TP
3
/TIOCB
0
/
TCLKD
PA
3
/TP
3
/TIOCB
0
/
TCLKD
PA
3
/TP
3
/TIOCB
0
/
TCLKD
PA
3
/TP
3
/TIOCB
0
/
TCLKD
97
99
PA
4
/TP
4
/TIOCA
1
PA
4
/TP
4
/TIOCA
1
PA
4
/TP
4
/TIOCA
1
/
A
23
PA
4
/TP
4
/TIOCA
1
/
A
23
98
100
PA
5
/TP
5
/TIOCB
1
PA
5
/TP
5
/TIOCB
1
PA
5
/TP
5
/TIOCB
1
/
A
22
PA
5
/TP
5
/TIOCB
1
/
A
22
99
1
PA
6
/TP
6
/TIOCA
2
PA
6
/TP
6
/TIOCA
2
PA
6
/TP
6
/TIOCA
2
/
A
21
PA
6
/TP
6
/TIOCA
2
/
A
21
100
2
PA
7
/TP
7
/TIOCB
2
PA
7
/TP
7
/TIOCB
2
A
20
A
20
Notes: 1. In modes 1 and 3, the P4
0
to P4
7
functions of pins P4
0
/D
0
to P4
7
/D
7
are selected after a
reset, but they can be changed by software.
2. In modes 2 and 4, the D
0
to D
7
functions of pins P4
0
/D
0
to P4
7
/D
7
are selected after a
reset, but they can be changed by software.

17
Section 2 CPU
2.1
Overview
The H8/300H CPU is a high-speed central processing unit with an internal 32-bit architecture that
is upward-compatible with the H8/300 CPU. The H8/300H CPU has sixteen 16-bit general
registers, can address a 16-Mbyte linear address space, and is ideal for realtime control.
2.1.1
Features
The H8/300H CPU has the following features.
∑
Upward compatibility with H8/300 CPU
Can execute H8/300 Series object programs
∑
General-register architecture
Sixteen 16-bit general registers (also usable as sixteen 8-bit registers or eight 32-bit registers)
∑
Sixty-two basic instructions
8/16/32-bit arithmetic and logic instructions
Multiply and divide instructions
Powerful bit-manipulation instructions
∑
Eight addressing modes
Register direct [Rn]
Register indirect [@ERn]
Register indirect with displacement [@(d:16, ERn) or @(d:24, ERn)]
Register indirect with post-increment or pre-decrement [@ERn+ or @≠ERn]
Absolute address [@aa:8, @aa:16, or @aa:24]
Immediate [#xx:8, #xx:16, or #xx:32]
Program-counter relative [@(d:8, PC) or @(d:16, PC)]
Memory indirect [@@aa:8]
∑
16-Mbyte linear address space

18
∑
High-speed operation
All frequently-used instructions execute in two to four states
Maximum clock frequency:
20 MHz
8/16/32-bit register-register add/subtract: 100 ns
8
◊
8-bit register-register multiply:
700 ns
16 ˜ 8-bit register-register divide:
700 ns
16
◊
16-bit register-register multiply:
1.1 µs
32 ˜ 16-bit register-register divide:
1.1 µs
∑
Two CPU operating modes
Normal mode (not available in the H8/3006 and H8/3007)
Advanced mode
∑
Low-power mode
Transition to power-down state by SLEEP instruction
2.1.2
Differences from H8/300 CPU
In comparison to the H8/300 CPU, the H8/300H has the following enhancements.
∑
More general registers
Eight 16-bit registers have been added.
∑
Expanded address space
Advanced mode supports a maximum 16-Mbyte address space.
Normal mode supports the same 64-kbyte address space as the H8/300 CPU.
∑
Enhanced addressing
The addressing modes have been enhanced to make effective use of the 16-Mbyte address
space.
∑
Enhanced instructions
Data transfer, arithmetic, and logic instructions can operate on 32-bit data.
Signed multiply/divide instructions and other instructions have been added.
19
2.2
CPU Operating Modes
The H8/300H CPU has two operating modes: normal and advanced. Normal mode supports a
maximum 64-kbyte address space. Advanced mode supports up to 16 Mbytes.
CPU operating modes
Note: * Normal mode is not available in the H8/3006 and H8/3007.
Normal mode*
Advanced mode
Maximum 64 kbytes, program
and data areas combined
Maximum 16 Mbytes, program
and data areas combined
Figure 2-1 CPU Operating Modes
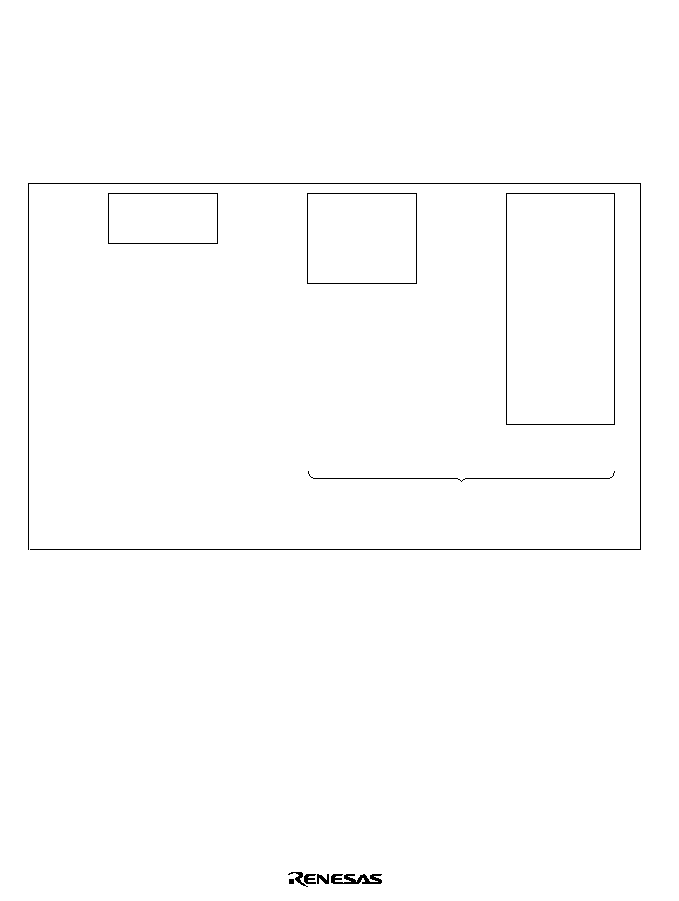
20
2.3
Address Space
Figure 2-2 shows a simple memory map for the H8/3006 and H8/3007. The H8/300H CPU can
address a linear address space with a maximum size of 64 kbytes in normal mode, and 16 Mbytes
in advanced mode. For further details see section 3.6, Memory Map in Each Operating Mode.
The 1-Mbyte operating modes use 20-bit addressing. The upper 4 bits of effective addresses are
ignored.
H'00000
H'FFFFF
H'000000
H'FFFFFF
a. 1-Mbyte mode
b. 16-Mbyte mode
H'0000
Note: * Normal mode is not available in the H8/3006 and H8/3007.
H'FFFF
Advanced mode
Normal mode*
Figure 2-2 Memory Map
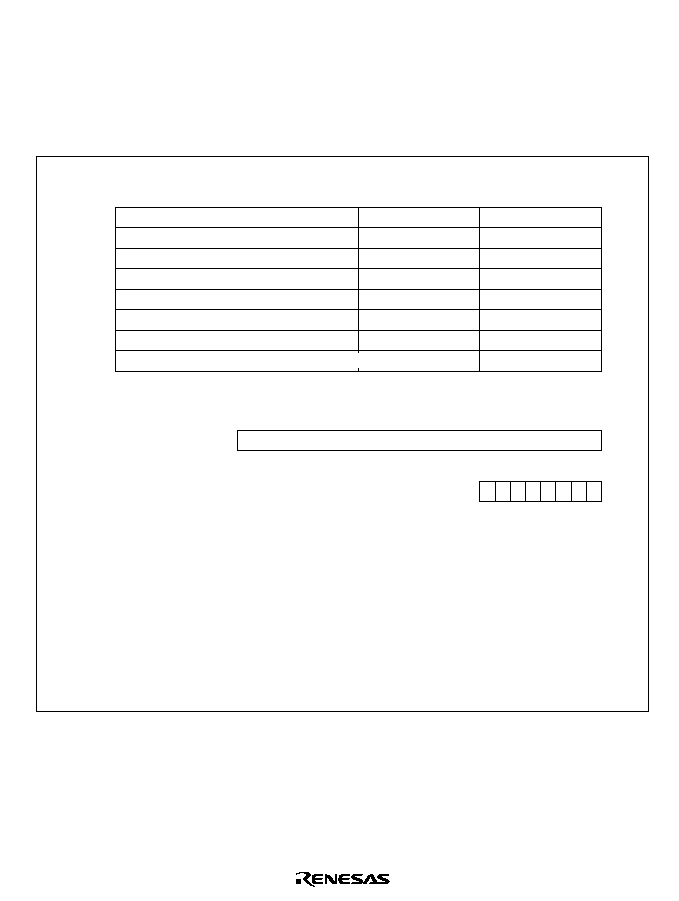
21
2.4
Register Configuration
2.4.1
Overview
The H8/300H CPU has the internal registers shown in figure 2-3. There are two types of registers:
general registers and control registers.
ER0
ER1
ER2
ER3
ER4
ER5
ER6
ER7
E0
E1
E2
E3
E4
E5
E6
E7
R0H
R1H
R2H
R3H
R4H
R5H
R6H
R7H
R0L
R1L
R2L
R3L
R4L
R5L
R6L
R7L
0
7
0
7
0
15
(SP)
23
0
PC
7
CCR
6 5 4 3 2 1 0
I UI H U N Z V C
General Registers (ERn)
Control Registers (CR)
Legend
SP:
PC:
CCR:
I:
UI:
H:
U:
N:
Z:
V:
C:
Stack pointer
Program counter
Condition code register
Interrupt mask bit
User bit or interrupt mask bit
Half-carry flag
User bit
Negative flag
Zero flag
Overflow flag
Carry flag
Figure 2-3 CPU Registers
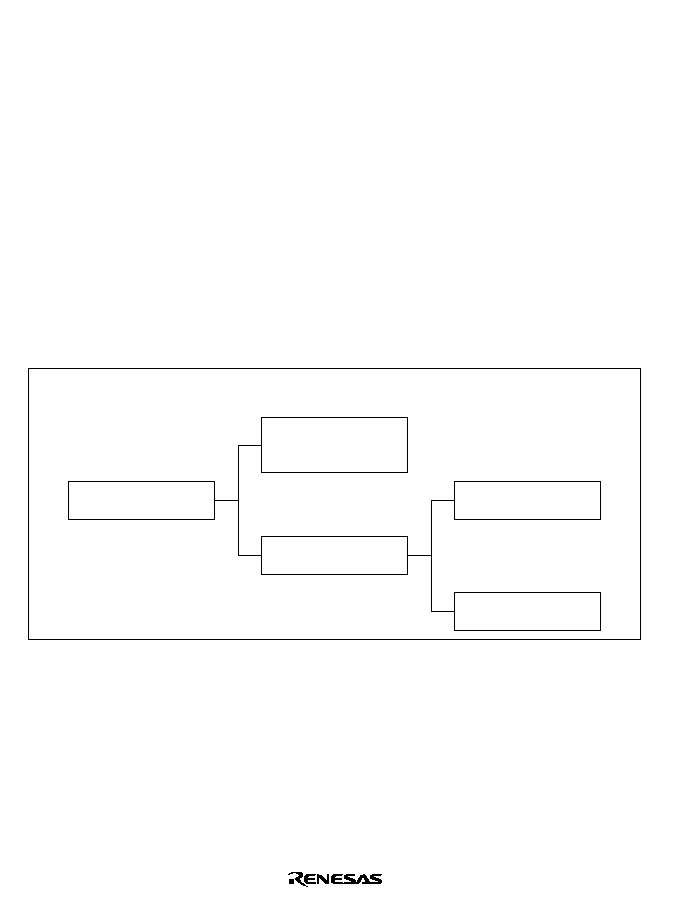
22
2.4.2
General Registers
The H8/300H CPU has eight 32-bit general registers. These general registers are all functionally
alike and can be used without distinction between data registers and address registers. When a
general register is used as a data register, it can be accessed as a 32-bit, 16-bit, or 8-bit register.
When the general registers are used as 32-bit registers or as address registers, they are designated
by the letters ER (ER0 to ER7).
The ER registers divide into 16-bit general registers designated by the letters E (E0 to E7) and R
(R0 to R7). These registers are functionally equivalent, providing a maximum sixteen 16-bit
registers. The E registers (E0 to E7) are also referred to as extended registers.
The R registers divide into 8-bit general registers designated by the letters RH (R0H to R7H) and
RL (R0L to R7L). These registers are functionally equivalent, providing a maximum sixteen 8-bit
registers.
Figure 2-4 illustrates the usage of the general registers. The usage of each register can be selected
independently.
∑ Address registers
∑ 32-bit registers
∑ 16-bit registers
∑ 8-bit registers
ER registers
ER0 to ER7
E registers
(extended registers)
E0 to E7
R registers
R0 to R7
RH registers
R0H to R7H
RL registers
R0L to R7L
Figure 2-4 Usage of General Registers
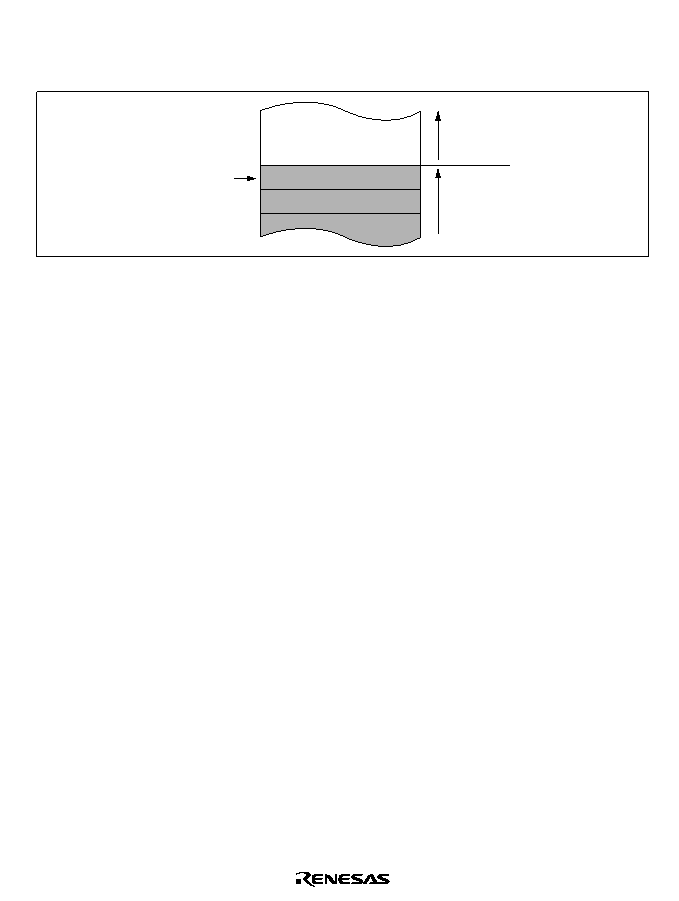
23
General register ER7 has the function of stack pointer (SP) in addition to its general-register
function, and is used implicitly in exception handling and subroutine calls. Figure 2-5 shows the
stack.
Free area
Stack area
SP (ER7)
Figure 2-5 Stack
2.4.3
Control Registers
The control registers are the 24-bit program counter (PC) and the 8-bit condition code register
(CCR).
Program Counter (PC): This 24-bit counter indicates the address of the next instruction the CPU
will execute. The length of all CPU instructions is 2 bytes (one word) or a multiple of 2 bytes, so
the least significant PC bit is ignored. When an instruction is fetched, the least significant PC bit is
regarded as 0.
Condition Code Register (CCR): This 8-bit register contains internal CPU status information,
including the interrupt mask bit (I) and half-carry (H), negative (N), zero (Z), overflow (V), and
carry (C) flags.
Bit 7--Interrupt Mask Bit (I): Masks interrupts other than NMI when set to 1. NMI is accepted
regardless of the I bit setting. The I bit is set to 1 at the start of an exception-handling sequence.
Bit 6--User Bit or Interrupt Mask Bit (UI): Can be written and read by software using the
LDC, STC, ANDC, ORC, and XORC instructions. This bit can also be used as an interrupt mask
bit. For details see section 5, Interrupt Controller.

24
Bit 5--Half-Carry Flag (H): When the ADD.B, ADDX.B, SUB.B, SUBX.B, CMP.B, or NEG.B
instruction is executed, this flag is set to 1 if there is a carry or borrow at bit 3, and cleared to 0
otherwise. When the ADD.W, SUB.W, CMP.W, or NEG.W instruction is executed, the H flag is
set to 1 if there is a carry or borrow at bit 11, and cleared to 0 otherwise. When the ADD.L,
SUB.L, CMP.L, or NEG.L instruction is executed, the H flag is set to 1 if there is a carry or
borrow at bit 27, and cleared to 0 otherwise.
Bit 4--User Bit (U): Can be written and read by software using the LDC, STC, ANDC, ORC, and
XORC instructions.
Bit 3--Negative Flag (N): Stores the value of the most significant bit of data, regarded as the
sign bit.
Bit 2--Zero Flag (Z): Set to 1 to indicate zero data, and cleared to 0 to indicate non-zero data.
Bit 1--Overflow Flag (V): Set to 1 when an arithmetic overflow occurs, and cleared to 0 at other
times.
Bit 0--Carry Flag (C): Set to 1 when a carry is generated by execution of an operation, and
cleared to 0 otherwise. Used by:
∑
Add instructions, to indicate a carry
∑
Subtract instructions, to indicate a borrow
∑
Shift and rotate instructions
The carry flag is also used as a bit accumulator by bit manipulation instructions.
Some instructions leave flag bits unchanged. Operations can be performed on CCR by the LDC,
STC, ANDC, ORC, and XORC instructions. The N, Z, V, and C flags are used by conditional
branch (Bcc) instructions.
For the action of each instruction on the flag bits, see appendix A.1, Instruction List. For the I and
UI bits, see section 5, Interrupt Controller.
2.4.4
Initial CPU Register Values
In reset exception handling, PC is initialized to a value loaded from the vector table, and the I bit
in CCR is set to 1. The other CCR bits and the general registers are not initialized. In particular,
the initial value of the stack pointer (ER7) is also undefined. The stack pointer (ER7) must
therefore be initialized by an MOV.L instruction executed immediately after a reset.
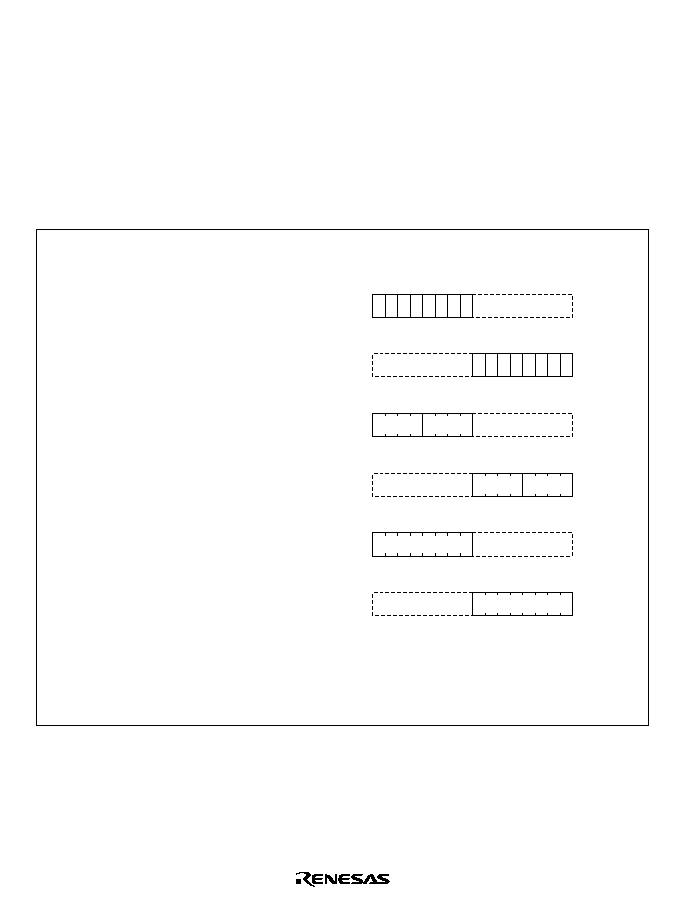
25
2.5
Data Formats
The H8/300H CPU can process 1-bit, 4-bit (BCD), 8-bit (byte), 16-bit (word), and 32-bit
(longword) data. Bit-manipulation instructions operate on 1-bit data by accessing bit n (n = 0, 1,
2, ..., 7) of byte operand data. The DAA and DAS decimal-adjust instructions treat byte data as
two digits of 4-bit BCD data.
2.5.1
General Register Data Formats
Figures 2-6 and 2-7 show the data formats in general registers.
7
RnH
RnL
RnH
RnL
RnH
RnL
1-bit data
1-bit data
4-bit BCD data
4-bit BCD data
Byte data
Byte data
6 5 4 3 2 1 0
7
0
Don't care
7 6 5 4 3 2 1 0
7
0
Don't care
Don't care
7
0
4 3
Lower digit
Upper digit
7
4 3
Lower digit
Upper digit
Don't care
0
7
0
Don't care
MSB
LSB
Don't care
7
0
MSB
LSB
Data Type
Data Format
General
Register
RnH:
RnL:
General register RH
General register RL
Legend
Figure 2-6 General Register Data Formats

26
Rn
En
ERn
Word data
Word data
Longword data
15
0
MSB
LSB
General
Register
Data Type
Data Format
15
0
MSB
LSB
31
16
MSB
15
0
LSB
Legend
ERn:
En:
Rn:
MSB:
LSB:
General register
General register E
General register R
Most significant bit
Least significant bit
Figure 2-7 General Register Data Formats
2.5.2
Memory Data Formats
Figure 2-8 shows the data formats on memory. The H8/300H CPU can access word data and
longword data on memory, but word or longword data must begin at an even address. If an attempt
is made to access word or longword data at an odd address, no address error occurs but the least
significant bit of the address is regarded as 0, so the access starts at the preceding address. This
also applies to instruction fetches.

27
7
6
5
4
3
2
1
0
Address L
Address L
LSB
MSB
MSB
LSB
7
0
MSB
LSB
1-bit data
Byte data
Word data
Longword data
Address
Data Type
Data Format
Address 2M
Address 2M + 1
Address 2N
Address 2N + 1
Address 2N + 2
Address 2N + 3
Figure 2-8 Memory Data Formats
When ER7 (SP) is used as an address register to access the stack, the operand size should be word
size or longword size.
28
2.6
Instruction Set
2.6.1
Instruction Set Overview
The H8/300H CPU has 64 types of instructions, which are classified in table 2-1.
Table 2-1
Instruction Classification
Function
Instruction
Types
Data transfer
MOV, PUSH*
1
, POP*
1
, MOVTPE*
2
, MOVFPE*
2
5
Arithmetic operations
ADD, SUB, ADDX, SUBX, INC, DEC, ADDS, SUBS, DAA, DAS,
MULXU, MULXS, DIVXU, DIVXS, CMP, NEG, EXTS, EXTU
18
Logic operations
AND, OR, XOR, NOT
4
Shift operations
SHAL, SHAR, SHLL, SHLR, ROTL, ROTR, ROTXL, ROTXR
8
Bit manipulation
BSET, BCLR, BNOT, BTST, BAND, BIAND, BOR, BIOR, BXOR,
BIXOR, BLD, BILD, BST, BIST
14
Branch
Bcc*
3
, JMP, BSR, JSR, RTS
5
System control
TRAPA, RTE, SLEEP, LDC, STC, ANDC, ORC, XORC, NOP
9
Block data transfer
EEPMOV
1
Total 64 types
Notes: 1. POP.W Rn is identical to MOV.W @SP+, Rn.
PUSH.W Rn is identical to MOV.W Rn, @≠SP.
POP.L ERn is identical to MOV.L @SP+, Rn.
PUSH.L ERn is identical to MOV.L Rn, @≠SP.
2.
Not available in the H8/3006 and H8/3007.
3. Bcc is a generic branching instruction.
29
2.6.2
Instructions and Addressing Modes
Table 2-2 indicates the instructions available in the H8/300H CPU.
Table 2-2
Instructions and Addressing Modes
Addressing Modes
Function
Instruction
#xx
Rn
@ERn
@
(d:16,
ERn)
@
(d:24,
ERn)
@ERn+/
@≠ERn
@
aa:8
@
aa:16
@
aa:24
@
(d:8,
PC)
@
(d:16,
PC)
@@
aa:8
--
Data
MOV
BWL
BWL
BWL
BWL
BWL
BWL
B
BWL
BWL
--
--
--
--
transfer
POP, PUSH
--
--
--
--
--
--
--
--
--
--
--
--
WL
MOVFPE,
--
--
--
--
--
--
--
--
--
--
--
--
--
MOVTPE
Arithmetic
ADD, CMP
BWL
BWL
--
--
--
--
--
--
--
--
--
--
--
operations
SUB
WL
BWL
--
--
--
--
--
--
--
--
--
--
--
ADDX, SUBX
B
B
--
--
--
--
--
--
--
--
--
--
--
ADDS, SUBS
--
L
--
--
--
--
--
--
--
--
--
--
--
INC, DEC
--
BWL
--
--
--
--
--
--
--
--
--
--
--
DAA, DAS
--
B
--
--
--
--
--
--
--
--
--
--
--
MULXU,
--
BW
--
--
--
--
--
--
--
--
--
--
--
MULXS,
DIVXU,
DIVXS
NEG
--
BWL
--
--
--
--
--
--
--
--
--
--
--
EXTU, EXTS
--
WL
--
--
--
--
--
--
--
--
--
--
--
Logic
operations
AND, OR, XOR
--
BWL
--
--
--
--
--
--
--
--
--
--
--
NOT
--
BWL
--
--
--
--
--
--
--
--
--
--
--
Shift instructions
--
BWL
--
--
--
--
--
--
--
--
--
--
--
Bit manipulation
--
B
B
--
--
--
B
--
--
--
--
--
--
Branch
Bcc, BSR
--
--
--
--
--
--
--
--
--
--
--
--
--
JMP, JSR
--
--
--
--
--
--
--
--
--
--
RTS
--
--
--
--
--
--
--
--
--
--
--
System
TRAPA
--
--
--
--
--
--
--
--
--
--
--
--
control
RTE
--
--
--
--
--
--
--
--
--
--
--
--
SLEEP
--
--
--
--
--
--
--
--
--
--
--
--
LDC
B
B
W
W
W
W
--
W
W
--
--
--
STC
--
B
W
W
W
W
--
W
W
--
--
--
--
ANDC, ORC,
XORC
B
--
--
--
--
--
--
--
--
--
--
--
--
NOP
--
--
--
--
--
--
--
--
--
--
--
--
Block data transfer
--
--
--
--
--
--
--
--
--
--
--
--
BW
30
2.6.3
Tables of Instructions Classified by Function
Tables 2-3 to 2-10 summarize the instructions in each functional category. The operation notation
used in these tables is defined next.
Operation Notation
Rd
General register (destination)*
Rs
General register (source)*
Rn
General register*
ERn
General register (32-bit register or address register)
(EAd)
Destination operand
(EAs)
Source operand
CCR
Condition code register
N
N (negative) flag of CCR
Z
Z (zero) flag of CCR
V
V (overflow) flag of CCR
C
C (carry) flag of CCR
PC
Program counter
SP
Stack pointer
#IMM
Immediate data
disp
Displacement
+
Addition
≠
Subtraction
◊
Multiplication
˜
Division
AND logical
OR logical
Exclusive OR logical
Move
¨
NOT (logical complement)
:3/:8/:16/:24
3-, 8-, 16-, or 24-bit length
Note:
*
General registers include 8-bit registers (R0H to R7H, R0L to R7L), 16-bit registers (R0
to R7, E0 to E7), and 32-bit data or address registers (ER0 to ER7).
31
Table 2-3
Data Transfer Instructions
Instruction Size*
Function
MOV
B/W/L
(EAs)
Rd, Rs
(EAd)
Moves data between two general registers or between a general register and
memory, or moves immediate data to a general register.
MOVFPE
B
(EAs)
Rd
Cannot be used in this LSI.
MOVTPE
B
Rs
(EAs)
Cannot be used in this LSI.
POP
W/L
@SP+
Rn
Pops a general register from the stack. POP.W Rn is identical to MOV.W
@SP+, Rn. Similarly, POP.L ERn is identical to MOV.L @SP+, ERn.
PUSH
W/L
Rn
@≠SP
Pushes a general register onto the stack. PUSH.W Rn is identical to MOV.W
Rn, @≠SP. Similarly, PUSH.L ERn is identical to MOV.L ERn, @≠SP.
Note: * Size refers to the operand size.
B: Byte
W: Word
L: Longword
32
Table 2-4
Arithmetic Operation Instructions
Instruction Size*
Function
ADD,SUB
B/W/L
Rd ± Rs
Rd, Rd ± #IMM
Rd
Performs addition or subtraction on data in two general registers, or on
immediate data and data in a general register. (Immediate byte data cannot
be subtracted from data in a general register. Use the SUBX or ADD
instruction.)
ADDX,
SUBX
B
Rd ± Rs ± C
Rd, Rd ± #IMM ± C
Rd
Performs addition or subtraction with carry or borrow on data in two general
registers, or on immediate data and data in a general register.
INC,
DEC
B/W/L
Rd ± 1
Rd, Rd ± 2
Rd
Increments or decrements a general register by 1 or 2. (Byte operands can
be incremented or decremented by 1 only.)
ADDS,
SUBS
L
Rd ± 1
Rd, Rd ± 2
Rd, Rd ± 4
Rd
Adds or subtracts the value 1, 2, or 4 to or from data in a 32-bit register.
DAA,
DAS
B
Rd decimal adjust
Rd
Decimal-adjusts an addition or subtraction result in a general register by
referring to CCR to produce 4-bit BCD data.
MULXU
B/W
Rd
◊
Rs
Rd
Performs unsigned multiplication on data in two general registers:
either 8 bits
◊
8 bits
16 bits or 16 bits
◊
16 bits
32 bits.
MULXS
B/W
Rd
◊
Rs
Rd
Performs signed multiplication on data in two general registers:
either 8 bits
◊
8 bits
16 bits or 16 bits
◊
16 bits
32 bits.
33
Instruction Size*
Function
DIVXU
B/W
Rd ˜ Rs
Rd
Performs unsigned division on data in two general registers: either 16 bits ˜ 8
bits
8-bit quotient and 8-bit remainder or 32 bits ˜ 16 bits
16-bit quotient
and 16-bit remainder
DIVXS
B/W
Rd ˜ Rs
Rd
Performs signed division on data in two general registers: either 16 bits ˜ 8
bits
8-bit quotient and 8-bit remainder, or 32 bits ˜ 16 bits
16-bit
quotient and 16-bit remainder
CMP
B/W/L
Rd ≠ Rs, Rd ≠ #IMM
Compares data in a general register with data in another general register or
with immediate data, and sets CCR according to the result.
NEG
B/W/L
0 ≠ Rd
Rd
Takes the two's complement (arithmetic complement) of data in a general
register.
EXTS
W/L
Rd (sign extension)
Rd
Extends byte data in the lower 8 bits of a 16-bit register to word data, or
extends word data in the lower 16 bits of a 32-bit register to longword data,
by extending the sign bit.
EXTU
W/L
Rd (zero extension)
Rd
Extends byte data in the lower 8 bits of a 16-bit register to word data, or
extends word data in the lower 16 bits of a 32-bit register to longword data,
by padding with zeros.
Note: * Size refers to the operand size.
B: Byte
W: Word
L: Longword

34
Table 2-5
Logic Operation Instructions
Instruction Size*
Function
AND
B/W/L
Rd
Rs
Rd, Rd
#IMM
Rd
Performs a logical AND operation on a general register and another general
register or immediate data.
OR
B/W/L
Rd
Rs
Rd, Rd
#IMM
Rd
Performs a logical OR operation on a general register and another general
register or immediate data.
XOR
B/W/L
Rd
Rs
Rd, Rd
#IMM
Rd
Performs a logical exclusive OR operation on a general register and another
general register or immediate data.
NOT
B/W/L
¨ Rd
Rd
Takes the one's complement (logical complement) of general register
contents.
Note: * Size refers to the operand size.
B: Byte
W: Word
L: Longword
Table 2-6
Shift Instructions
Instruction Size*
Function
SHAL,
SHAR
B/W/L
Rd (shift)
Rd
Performs an arithmetic shift on general register contents.
SHLL,
SHLR
B/W/L
Rd (shift)
Rd
Performs a logical shift on general register contents.
ROTL,
ROTR
B/W/L
Rd (rotate)
Rd
Rotates general register contents.
ROTXL,
ROTXR
B/W/L
Rd (rotate)
Rd
Rotates general register contents, including the carry bit.
Note: * Size refers to the operand size.
B: Byte
W: Word
L: Longword
35
Table 2-7
Bit Manipulation Instructions
Instruction Size*
Function
BSET
B
1
(<bit-No.> of <EAd>)
Sets a specified bit in a general register or memory operand to 1. The bit
number is specified by 3-bit immediate data or the lower 3 bits of a general
register.
BCLR
B
0
(<bit-No.> of <EAd>)
Clears a specified bit in a general register or memory operand to 0. The bit
number is specified by 3-bit immediate data or the lower 3 bits of a general
register.
BNOT
B
¨ (<bit-No.> of <EAd>)
(<bit-No.> of <EAd>)
Inverts a specified bit in a general register or memory operand. The bit
number is specified by 3-bit immediate data or the lower 3 bits of a general
register.
BTST
B
¨ (<bit-No.> of <EAd>)
Z
Tests a specified bit in a general register or memory operand and sets or
clears the Z flag accordingly. The bit number is specified by 3-bit immediate
data or the lower 3 bits of a general register.
BAND
B
C
(<bit-No.> of <EAd>)
C
ANDs the carry flag with a specified bit in a general register or memory
operand and stores the result in the carry flag. The bit number is specified by
3-bit immediate data.
BIAND
B
C
[¨ (<bit-No.> of <EAd>)]
C
ANDs the carry flag with the inverse of a specified bit in a general register or
memory operand and stores the result in the carry flag.
The bit number is specified by 3-bit immediate data.

36
Instruction Size*
Function
BOR
B
C
(<bit-No.> of <EAd>)
C
ORs the carry flag with a specified bit in a general register or memory
operand and stores the result in the carry flag.
The bit number is specified by 3-bit immediate data.
BIOR
B
C
[¨ (<bit-No.> of <EAd>)]
C
ORs the carry flag with the inverse of a specified bit in a general register or
memory operand and stores the result in the carry flag.
The bit number is specified by 3-bit immediate data.
BXOR
B
C
(<bit-No.> of <EAd>)
C
Exclusive-ORs the carry flag with a specified bit in a general register or
memory operand and stores the result in the carry flag.
The bit number is specified by 3-bit immediate data.
BIXOR
B
C
[¨ (<bit-No.> of <EAd>)]
C
Exclusive-ORs the carry flag with the inverse of a specified bit in a general
register or memory operand and stores the result in the carry flag.
The bit number is specified by 3-bit immediate data.
BLD
B
(<bit-No.> of <EAd>)
C
Transfers a specified bit in a general register or memory operand to the carry
flag.
The bit number is specified by 3-bit immediate data.
BILD
B
¨ (<bit-No.> of <EAd>)
C
Transfers the inverse of a specified bit in a general register or memory
operand to the carry flag.
The bit number is specified by 3-bit immediate data.
BST
B
C
(<bit-No.> of <EAd>)
Transfers the carry flag value to a specified bit in a general register or
memory operand.
The bit number is specified by 3-bit immediate data.
BIST
B
C
¨ (<bit-No.> of <EAd>)
Transfers the inverse of the carry flag value to a specified bit in a general
register or memory operand.
The bit number is specified by 3-bit immediate data.
Note: * Size refers to the operand size.
B: Byte

37
Table 2-8
Branching Instructions
Instruction Size
Function
Bcc
--
Branches to a specified address if address specified condition is met. The
branching conditions are listed below.
Mnemonic
Description
Condition
BRA (BT)
Always (true)
Always
BRN (BF)
Never (false)
Never
BHI
High
C
Z = 0
BLS
Low or same
C
Z = 1
Bcc (BHS)
Carry clear (high or same)
C = 0
BCS (BLO)
Carry set (low)
C = 1
BNE
Not equal
Z = 0
BEQ
Equal
Z = 1
BVC
Overflow clear
V = 0
BVS
Overflow set
V = 1
BPL
Plus
N = 0
BMI
Minus
N = 1
BGE
Greater or equal
N
V = 0
BLT
Less than
N
V = 1
BGT
Greater than
Z
(N
V) = 0
BLE
Less or equal
Z
(N
V) = 1
JMP
--
Branches unconditionally to a specified address
BSR
--
Branches to a subroutine at a specified address
JSR
--
Branches to a subroutine at a specified address
RTS
--
Returns from a subroutine
38
Table 2-9
System Control Instructions
Instruction Size*
Function
TRAPA
--
Starts trap-instruction exception handling
RTE
--
Returns from an exception-handling routine
SLEEP
--
Causes a transition to the power-down state
LDC
B/W
(EAs)
CCR
Moves the source operand contents to the condition code register. The
condition code register size is one byte, but in transfer from memory, data is
read by word access.
STC
B/W
CCR
(EAd)
Transfers the CCR contents to a destination location. The condition code
register size is one byte, but in transfer to memory, data is written by word
access.
ANDC
B
CCR
#IMM
CCR
Logically ANDs the condition code register with immediate data.
ORC
B
CCR
#IMM
CCR
Logically ORs the condition code register with immediate data.
XORC
B
CCR
#IMM
CCR
Logically exclusive-ORs the condition code register with immediate data.
NOP
--
PC + 2
PC
Only increments the program counter.
Note: * Size refers to the operand size.
B: Byte
W: Word
39
Table 2-10 Block Transfer Instruction
Instruction
Size
Function
EEPMOV.B
--
if R4L
0 then
repeat
@ER5+
@ER6+, R4L ≠ 1
R4L
until
R4L = 0
else next;
EEPMOV.W
--
if R4
0 then
repeat
@ER5+
@ER6+, R4 ≠ 1
R4
until
R4 = 0
else next;
Block transfer instruction. This instruction transfers the number of data bytes
specified by R4L or R4, starting from the address indicated by ER5, to the
location starting at the address indicated by ER6. At the end of the transfer,
the next instruction is executed.
2.6.4 Basic Instruction Formats
The H8/300H instructions consist of 2-byte (1-word) units. An instruction consists of an operation
field (OP field), a register field (r field), an effective address extension (EA field), and a condition
field (cc).
Operation Field: Indicates the function of the instruction, the addressing mode, and the operation
to be carried out on the operand. The operation field always includes the first 4 bits of the
instruction. Some instructions have two operation fields.
Register Field: Specifies a general register. Address registers are specified by 3 bits, data registers
by 3 bits or 4 bits. Some instructions have two register fields. Some have no register field.
Effective Address Extension: Eight, 16, or 32 bits specifying immediate data, an absolute
address, or a displacement. A 24-bit address or displacement is treated as 32-bit data in which the
first 8 bits are 0 (H'00).
Condition Field: Specifies the branching condition of Bcc instructions.
Figure 2-9 shows examples of instruction formats.
40
op
NOP, RTS, etc.
op
rn
rm
op
rn
rm
EA (disp)
Operation field only
ADD.B Rn, Rm, etc.
Operation field and register fields
MOV.B @(d:16, Rn), Rm
Operation field, register fields, and effective address extension
BRA d:8
Operation field, effective address extension, and condition field
op
cc
EA (disp)
Figure 2-9 Instruction Formats
2.6.5
Notes on Use of Bit Manipulation Instructions
The BSET, BCLR, BNOT, BST, and BIST instructions read a byte of data, modify a bit in the
byte, then write the byte back. Care is required when these instructions are used to access registers
with write-only bits, or to access ports.
Step
Description
1
Read
Read one data byte at the specified address
2
Modify
Modify one bit in the data byte
3
Write
Write the modified data byte back to the specified address
Example 1: BCLR is executed to clear bit 0 in the port 4 data direction register (P4DDR) under
the following conditions.
P4
7
, P4
6
:
Input pins
P4
5
≠ P4
0
:
Output pins
The intended purpose of this BCLR instruction is to switch P4
0
from output to input.
41
Before Execution of BCLR Instruction
P4
7
P4
6
P4
5
P4
4
P4
3
P4
2
P4
1
P4
0
Input/output
Input
Input
Output
Output
Output
Output
Output
Output
DDR
0
0
1
1
1
1
1
1
Execution of BCLR Instruction
BCLR #0, @P4DDR
;Clear bit 0 in data direction register
After Execution of BCLR Instruction
P4
7
P4
6
P4
5
P4
4
P4
3
P4
2
P4
1
P4
0
Input/output
Output
Output
Output
Output
Output
Output
Output
Input
DDR
1
1
1
1
1
1
1
0
Explanation: To execute the BCLR instruction, the CPU begins by reading P4DDR. Since
P4DDR is a write-only register, it is read as H'FF, even though its true value is H'3F.
Next the CPU clears bit 0 of the read data, changing the value to H'FE.
Finally, the CPU writes this value (H'FE) back to P4DDR to complete the BCLR instruction.
As a result, P4
0
DDR is cleared to 0, making P4
0
an input pin. In addition, P4
7
DDR and P4
6
DDR
are set to 1, making P4
7
and P4
6
output pins.
The BCLR instruction can be used to clear flags in the on-chip registers to 0. In the case of the
IRQ status register (ISR), for example, a flag must be read as a condition for clearing it, but when
using the BCLR instruction, if it is known that a flag has been set to 1 in an interrupt-handling
routine, for instance, it is not necessary to read the flag ahead of time.

42
2.7
Addressing Modes and Effective Address Calculation
2.7.1
Addressing Modes
The H8/300H CPU supports the eight addressing modes listed in table 2-11. Each instruction uses
a subset of these addressing modes. Arithmetic and logic instructions can use the register direct
and immediate modes. Data transfer instructions can use all addressing modes except program-
counter relative and memory indirect. Bit manipulation instructions use register direct, register
indirect, or absolute (@aa:8) addressing mode to specify an operand, and register direct (BSET,
BCLR, BNOT, and BTST instructions) or immediate (3-bit) addressing mode to specify a bit
number in the operand.
Table 2-11 Addressing Modes
No.
Addressing Mode
Symbol
1
Register direct
Rn
2
Register indirect
@ERn
3
Register indirect with displacement
@(d:16, ERn)/@(d:24, ERn)
4
Register indirect with post-increment
Register indirect with pre-decrement
@ERn+
@≠ERn
5
Absolute address
@aa:8/@aa:16/@aa:24
6
Immediate
#xx:8/#xx:16/#xx:32
7
Program-counter relative
@(d:8, PC)/@(d:16, PC)
8
Memory indirect
@@aa:8
1 Register Direct--Rn: The register field of the instruction code specifies an 8-, 16-, or 32-bit
register containing the operand. R0H to R7H and R0L to R7L can be specified as 8-bit registers.
R0 to R7 and E0 to E7 can be specified as 16-bit registers. ER0 to ER7 can be specified as 32-bit
registers.
2 Register Indirect--@ERn: The register field of the instruction code specifies an address
register (ERn), the lower 24 bits of which contain the address of the operand.
3 Register Indirect with Displacement--@(d:16, ERn) or @(d:24, ERn): A 16-bit or 24-bit
displacement contained in the instruction code is added to the contents of an address register
(ERn) specified by the register field of the instruction, and the lower 24 bits of the sum specify the
address of a memory operand. A 16-bit displacement is sign-extended when added.

43
4 Register Indirect with Post-Increment or Pre-Decrement--@ERn+ or @≠ERn:
∑
Register indirect with post-increment--@ERn+
The register field of the instruction code specifies an address register (ERn) the lower 24 bits
of which contain the address of a memory operand. After the operand is accessed, 1, 2, or 4 is
added to the address register contents (32 bits) and the sum is stored in the address register.
The value added is 1 for byte access, 2 for word access, or 4 for longword access. For word or
longword access, the register value should be even.
∑
Register indirect with pre-decrement--@≠ERn
The value 1, 2, or 4 is subtracted from an address register (ERn) specified by the register field
in the instruction code, and the lower 24 bits of the result become the address of a memory
operand. The result is also stored in the address register. The value subtracted is 1 for byte
access, 2 for word access, or 4 for longword access. For word or longword access, the resulting
register value should be even.
5 Absolute Address--@aa:8, @aa:16, or @aa:24: The instruction code contains the absolute
address of a memory operand. The absolute address may be 8 bits long (@aa:8), 16 bits long
(@aa:16), or 24 bits long (@aa:24). For an 8-bit absolute address, the upper 16 bits are all
assumed to be 1 (H'FFFF). For a 16-bit absolute address the upper 8 bits are a sign extension. A
24-bit absolute address can access the entire address space. Table 2-12 indicates the accessible
address ranges.
Table 2-12 Absolute Address Access Ranges
Absolute
Address
1-Mbyte Modes
16-Mbyte Modes
8 bits (@aa:8)
H'FFF00 to H'FFFFF
(1048320 to 1048575)
H'FFFF00 to H'FFFFFF
(16776960 to 16777215)
16 bits (@aa:16)
H'00000 to H'07FFF,
H'F8000 to H'FFFFF
(0 to 32767, 1015808 to 1048575)
H'000000 to H'007FFF,
H'FF8000 to H'FFFFFF
(0 to 32767, 16744448 to 16777215)
24 bits (@aa:24)
H'00000 to H'FFFFF
(0 to 1048575)
H'000000 to H'FFFFFF
(0 to 16777215)
6 Immediate--#xx:8, #xx:16, or #xx:32: The instruction code contains 8-bit (#xx:8), 16-bit
(#xx:16), or 32-bit (#xx:32) immediate data as an operand.
The instruction codes of the ADDS, SUBS, INC, and DEC instructions contain immediate data
implicitly. The instruction codes of some bit manipulation instructions contain 3-bit immediate
data specifying a bit number. The TRAPA instruction code contains 2-bit immediate data
specifying a vector address.

44
7 Program-Counter Relative--@(d:8, PC) or @(d:16, PC): This mode is used in the Bcc and
BSR instructions. An 8-bit or 16-bit displacement contained in the instruction code is sign-
extended to 24 bits and added to the 24-bit PC contents to generate a 24-bit branch address. The
PC value to which the displacement is added is the address of the first byte of the next instruction,
so the possible branching range is ≠126 to +128 bytes (≠63 to +64 words) or ≠32766 to
+32768 bytes (≠16383 to +16384 words) from the branch instruction. The resulting value should
be an even number.
8 Memory Indirect--@@aa:8: This mode can be used by the JMP and JSR instructions. The
instruction code contains an 8-bit absolute address specifying a memory operand. This memory
operand contains a branch address. The memory operand is accessed by longword access. The first
byte of the memory operand is ignored, generating a 24-bit branch address. See figure 2-10. The
upper bits of the 8-bit absolute address are assumed to be 0 (H'0000), so the address range is 0 to
255 (H'000000 to H'0000FF). Note that the first part of this range is also the exception vector area.
For further details see section 5, Interrupt Controller.
Specified by @aa:8
Reserved
Branch address
Figure 2-10 Memory-Indirect Branch Address Specification
When a word-size or longword-size memory operand is specified, or when a branch address is
specified, if the specified memory address is odd, the least significant bit is regarded as 0. The
accessed data or instruction code therefore begins at the preceding address. See section 2.5.2,
Memory Data Formats.
2.7.2
Effective Address Calculation
Table 2-13 explains how an effective address is calculated in each addressing mode. In the
1-Mbyte operating modes the upper 4 bits of the calculated address are ignored in order to
generate a 20-bit effective address.
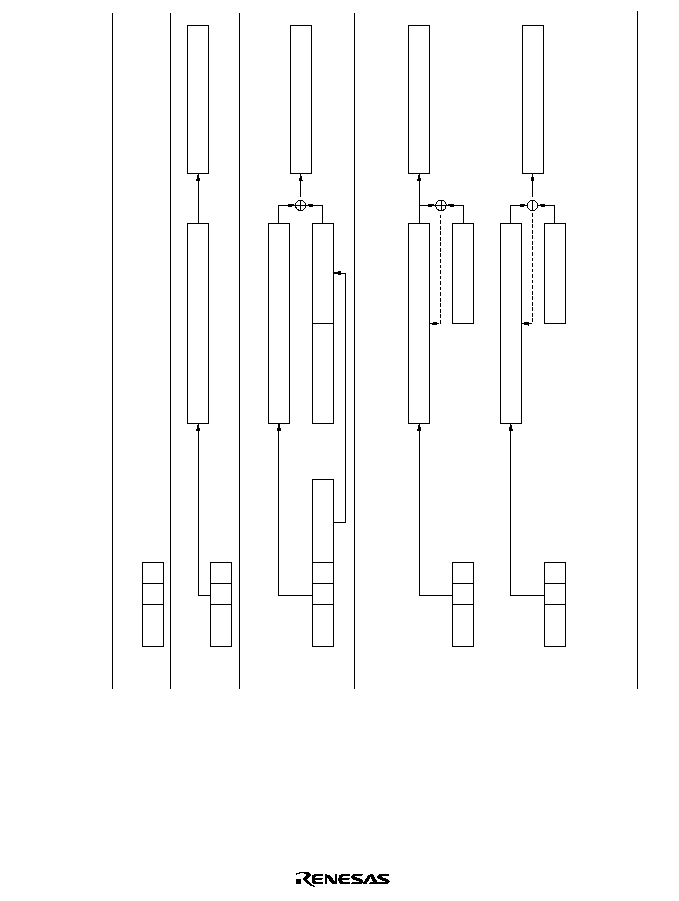
45
Table 2-13 Effective Address Calculation
Ad
dressing Mode and
Instruction Format
No.
Eff
ective Ad
dress Calculation
Eff
ective Ad
dress
Register direct (Rn)
1
Oper
and is gener
al
register contents
o
p
rm
rn
Register indirect (@ERn)
2
op
r
Gener
al register contents
31
0
23
0
Register indirect with displacement
@(d:16, ERn)/@(d:24, ERn)
3
op
r
Gener
al register contents
31
0
23
0
Sign e
xtension
disp
Register indirect with post-increment
or pre-decrement
4
Gener
al register contents
31
0
23
0
1, 2, or 4
op
r
Gener
al register contents
31
0
23
0
1, 2, or 4
op
r
Register indirect with post-increment
@ERn+
Register indirect with pre-decrement
@
≠
ERn
1 f
or a b
yte oper
and,
2 f
or a w
ord oper
and,
4 f
or a longw
ord oper
and

46
Ad
dressing Mode and
Instruction Format
No.
Eff
ective Ad
dress Calculation
Eff
ective Ad
dress
Absolute address
@aa:8
5
op
Prog
r
am-counter relativ
e
@(d:8, PC) or @(d:16, PC)
7
0
23
0
abs
23
0
87
@aa:16
@aa:24
op
abs
23
0
16
15
H'FFFF
Sign
e
xtension
op
23
0
abs
Immediate
#xx:8, #xx:16, or #xx:32
6
Oper
and is immediate data
op
disp
23
0
PC contents
disp
op
IMM
Sign
e
xtension
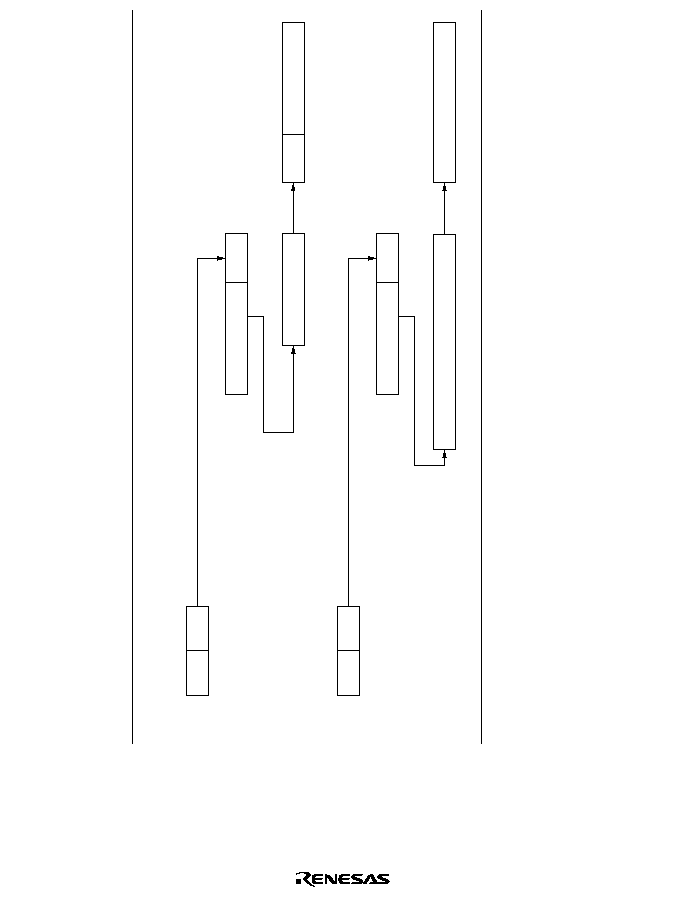
47
Ad
dressing Mode and
Instruction Format
No.
Eff
ective Ad
dress Calculation
Eff
ective Ad
dress
8
Legend
r
,
r
m, r
n
:
op:
disp:
IMM:
abs:
Register field
Oper
ation field
Displacement
Immediate data
Absolute address
Memor
y indirect @@aa:8
8
op
23
0
abs
23
0
87
H'0000
15
0
abs
16
15
Nor
mal mode
op
23
0
abs
23
0
87
H'0000
0
abs
Adv
anced mode
31
H'00
Memor
y contents
Memor
y contents

48
2.8
Processing States
2.8.1
Overview
The H8/300H CPU has five processing states: the program execution state, exception-handling
state, power-down state, reset state, and bus-released state. The power-down state includes sleep
mode, software standby mode, and hardware standby mode. Figure 2-11 classifies the processing
states. Figure 2-13 indicates the state transitions.
Processing states
Program execution state
Bus-released state
Reset state
Power-down state
The CPU executes program instructions in sequence
A transient state in which the CPU executes a hardware sequence
(saving PC and CCR, fetching a vector, etc.) in response to a reset,
interrupt, or other exception
The external bus has been released in response to a bus request
signal from a bus master other than the CPU
The CPU and all on-chip supporting modules are initialized and halted
The CPU is halted to conserve power
Sleep mode
Software standby mode
Hardware standby mode
Exception-handling state
Figure 2-11 Processing States
49
2.8.2
Program Execution State
In this state the CPU executes program instructions in normal sequence.
2.8.3
Exception-Handling State
The exception-handling state is a transient state that occurs when the CPU alters the normal
program flow due to a reset, interrupt, or trap instruction. The CPU fetches a starting address from
the exception vector table and branches to that address. In interrupt and trap exception handling
the CPU references the stack pointer (ER7) and saves the program counter and condition code
register.
Types of Exception Handling and Their Priority: Exception handling is performed for resets,
interrupts, and trap instructions. Table 2-14 indicates the types of exception handling and their
priority. Trap instruction exceptions are accepted at all times in the program execution state.
Table 2-14 Exception Handling Types and Priority
Priority
Type of Exception Detection Timing
Start of Exception Handling
High
Reset
Synchronized with clock
Exception handling starts immediately
when
RES
changes from low to high
Interrupt
End of instruction
execution or end of
exception handling*
When an interrupt is requested,
exception handling starts at the end of
the current instruction or current
exception-handling sequence
Low
Trap instruction
When TRAPA instruction
is executed
Exception handling starts when a trap
(TRAPA) instruction is executed
Note: * Interrupts are not detected at the end of the ANDC, ORC, XORC, and LDC instructions,
or immediately after reset exception handling.
Figure 2-12 classifies the exception sources. For further details about exception sources, vector
numbers, and vector addresses, see section 4, Exception Handling, and section 5, Interrupt
Controller.
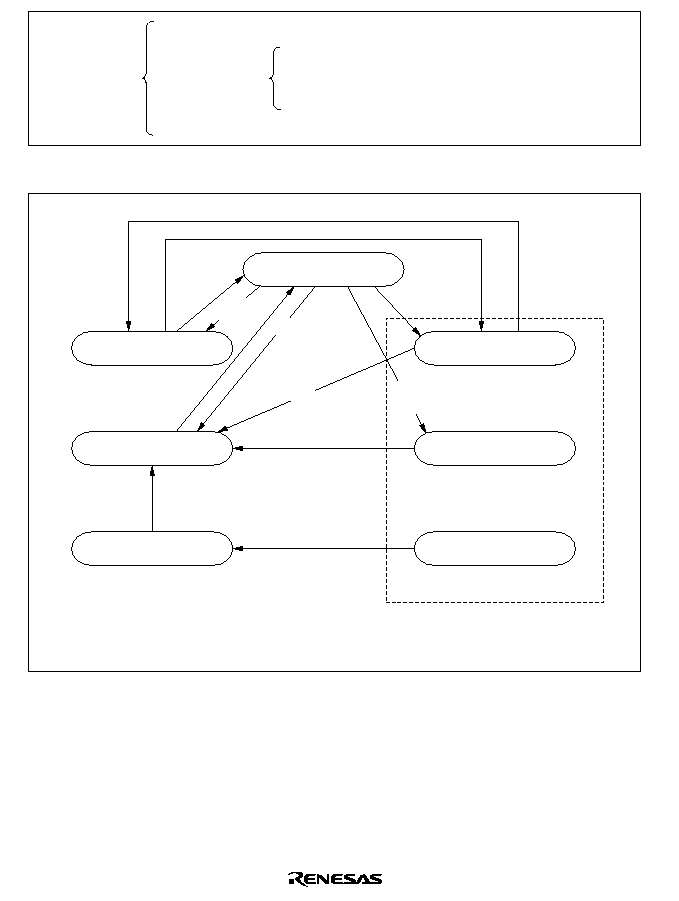
50
Exception
sources
Reset
Interrupt
Trap instruction
External interrupts
Internal interrupts (from on-chip supporting modules)
Figure 2-12 Classification of Exception Sources
Bus-released state
Exception-handling state
Reset state
Program execution state
Sleep mode
Software standby mode
Hardware standby mode
Power-down state
Bus request
End of bus release
End of bus
release
Bus
request
End of
exception
handling
Exception
handling source
Interrupt source
SLEEP
instruction
with SSBY = 0
SLEEP instruction
with SSBY = 1
NMI, IRQ , IRQ ,
or IRQ interrupt
STBY
= High,
RES
= Low
RES
= High
0
1
2
* 1
* 2
Notes: 1.
2.
From any state except hardware standby mode, a transition to the reset state occurs
whenever
RES
goes low.
From any state, a transition to hardware standby mode occurs when
STBY
goes low.
Figure 2-13 State Transitions
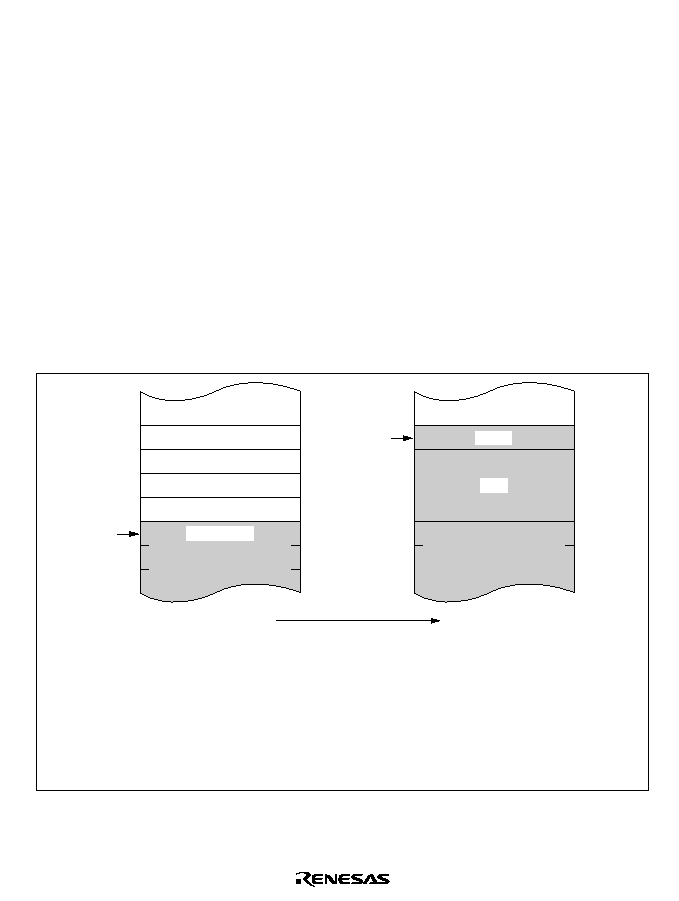
51
2.8.4
Exception-Handling Sequences
Reset Exception Handling: Reset exception handling has the highest priority. The reset state is
entered when the
RES signal goes low. Reset exception handling starts after that, when RES
changes from low to high. When reset exception handling starts the CPU fetches a start address
from the exception vector table and starts program execution from that address. All interrupts,
including NMI, are disabled during the reset exception-handling sequence and immediately after it
ends.
Interrupt Exception Handling and Trap Instruction Exception Handling: When these
exception-handling sequences begin, the CPU references the stack pointer (ER7) and pushes the
program counter and condition code register on the stack. Next, if the UE bit in the system control
register (SYSCR) is set to 1, the CPU sets the I bit in the condition code register to 1. If the UE bit
is cleared to 0, the CPU sets both the I bit and the UI bit in the condition code register to 1. Then
the CPU fetches a start address from the exception vector table and execution branches to that
address.
Figure 2-14 shows the stack after the exception-handling sequence.
SP≠4
SP≠3
SP≠2
SP≠1
SP (ER7)
Before exception
handling starts
SP (ER7)
SP+1
SP+2
SP+3
SP+4
After exception
handling ends
Stack area
CCR
PC
Even
address
Pushed on stack
Legend
CCR:
SP:
Condition code register
Stack pointer
Notes: 1.
2.
PC is the address of the first instruction executed after the return from the
exception-handling routine.
Registers must be saved and restored by word access or longword access,
starting at an even address.
Figure 2-14 Stack Structure after Exception Handling

52
2.8.5
Bus-Released State
In this state the bus is released to a bus master other than the CPU, in response to a bus request.
The bus masters other than the CPU are the DMA controller, the DRAM interface, and an external
bus master. While the bus is released, the CPU halts except for internal operations. Interrupt
requests are not accepted. For details see section 6.10, Bus Arbiter.
2.8.6
Reset State
When the
RES input goes low all current processing stops and the CPU enters the reset state. The I
bit in the condition code register is set to 1 by a reset. All interrupts are masked in the reset state.
Reset exception handling starts when the
RES signal changes from low to high.
The reset state can also be entered by a watchdog timer overflow. For details see section 12,
Watchdog Timer.
2.8.7
Power-Down State
In the power-down state the CPU stops operating to conserve power. There are three modes: sleep
mode, software standby mode, and hardware standby mode.
Sleep Mode: A transition to sleep mode is made if the SLEEP instruction is executed while the
SSBY bit is cleared to 0 in the system control register (SYSCR). CPU operations stop
immediately after execution of the SLEEP instruction, but the contents of CPU registers are
retained.
Software Standby Mode: A transition to software standby mode is made if the SLEEP
instruction is executed while the SSBY bit is set to 1 in SYSCR. The CPU and clock halt and all
on-chip supporting modules stop operating. The on-chip supporting modules are reset, but as long
as a specified voltage is supplied the contents of CPU registers and on-chip RAM are retained.
The I/O ports also remain in their existing states.
Hardware Standby Mode: A transition to hardware standby mode is made when the
STBY input
goes low. As in software standby mode, the CPU and all clocks halt and the on-chip supporting
modules are reset, but as long as a specified voltage is supplied, on-chip RAM contents are
retained.
For further information see section 19, Power-Down State.
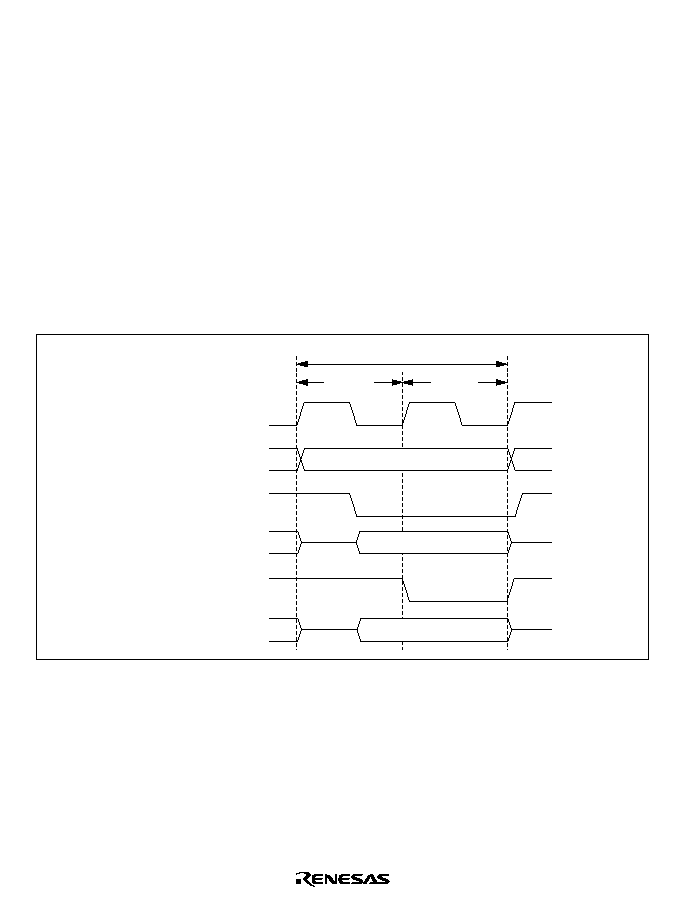
53
2.9
Basic Operational Timing
2.9.1
Overview
The H8/300H CPU operates according to the system clock (¯). The interval from one rise of the
system clock to the next rise is referred to as a "state." A memory cycle or bus cycle consists of
two or three states. The CPU uses different methods to access on-chip memory, the on-chip
supporting modules, and the external address space. Access to the external address space can be
controlled by the bus controller.
2.9.2
On-Chip Memory Access Timing
On-chip memory is accessed in two states. The data bus is 16 bits wide, permitting both byte and
word access. Figure 2-15 shows the on-chip memory access cycle. Figure 2-16 indicates the pin
states.
T state
Bus cycle
Internal address bus
Internal read signal
Internal data bus
(read access)
Internal write signal
Internal data bus
(write access)
1
T state
2
Read data
Address
Write data
Figure 2-15 On-Chip Memory Access Cycle

54
T
, , ,
AS
1
T
2
Address bus
D to D
15
0
RD HWR LWR
High
Address
High impedance
Figure 2-16 Pin States during On-Chip Memory Access
2.9.3
On-Chip Supporting Module Access Timing
The on-chip supporting modules are accessed in three states. The data bus is 8 or 16 bits wide,
depending on the internal I/O register being accessed. Figure 2-17 shows the on-chip supporting
module access timing. Figure 2-18 indicates the pin states.
Address bus
Internal read signal
Internal data bus
Internal write signal
Address
Internal data bus
T state
Bus cycle
1
T state
2
T state
3
Read
access
Write
access
Write data
Read data
Figure 2-17 Access Cycle for On-Chip Supporting Modules
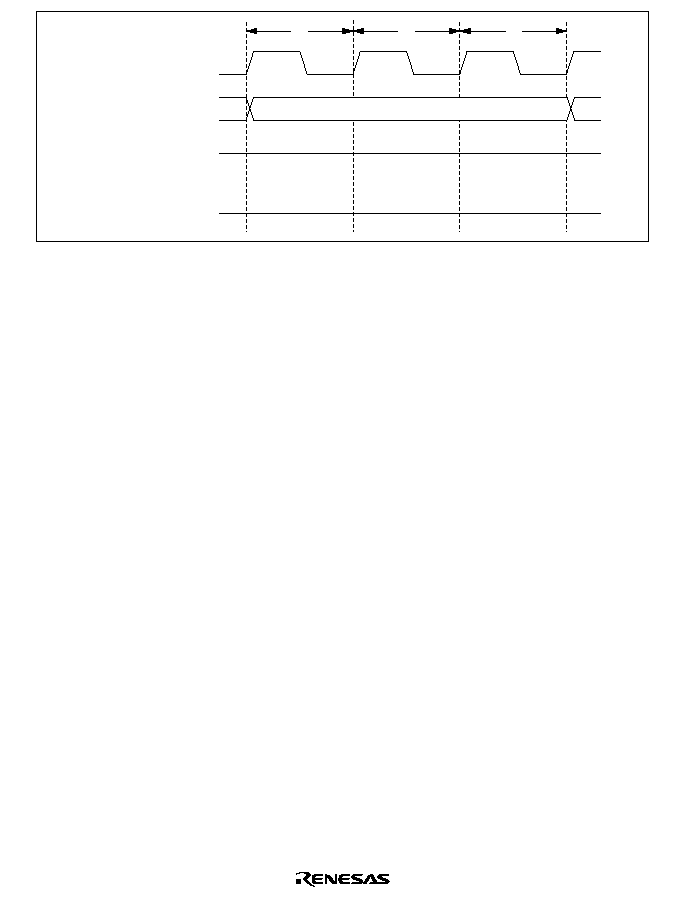
55
T
, , ,
AS
1
T
2
Address bus
D to D
15
0
RD HWR LWR
High
High impedance
T
3
Address
Figure 2-18 Pin States during Access to On-Chip Supporting Modules
2.9.4
Access to External Address Space
The external address space is divided into eight areas (areas 0 to 7). Bus-controller settings
determine whether each area is accessed via an 8-bit or 16-bit bus, and whether it is accessed in
two or three states. For details see section 6, Bus Controller.

57
Section 3 MCU Operating Modes
3.1
Overview
3.1.1
Operating Mode Selection
The H8/3006 and H8/3007 have four operating modes (modes 1 to 4) that are selected by the
mode pins (MD
2
to MD
0
) as indicated in table 3-1. The input at these pins determines the size of
the address space and the initial bus mode.
Table 3-1
Operating Mode Selection
Description
Operating
Mode Pins
Initial Bus
On-Chip
Mode
MD
2
MD
1
MD
0
Address Space
Mode*
1
RAM
--
0
0
0
Setting prohibited
Setting prohibited
Setting prohibited
Mode 1
0
0
1
1 Mbyte
8 bits
Enabled*
2
Mode 2
0
1
0
1 Mbyte
16 bits
Enabled*
2
Mode 3
0
1
1
16 Mbytes
8 bits
Enabled*
2
Mode 4
1
0
0
16 Mbytes
16 bits
Enabled*
2
--
1
0
1
--
--
--
--
1
1
0
--
--
--
--
1
1
1
--
--
--
Notes: 1. In modes 1 to 4, an 8-bit or 16-bit data bus can be selected on a per-area basis by
settings made in the area bus width control register (ABWCR). For details see
section 6, Bus Controller.
2. If the RAME bit in SYSCR is cleared to 0, these addresses become external addresses.
For the address space size there are two choices: 1 Mbyte, or 16 Mbyte.The external data bus is
either 8 or 16 bits wide depending on ABWCR settings. If 8-bit access is selected for all areas, 8-
bit bus mode is used. For details see section 6, Bus Controller.
Modes 1 and 2 support a maximum address space of 1 Mbyte. Modes 3 and 4 support a maximum
address space of 16 Mbytes.
The H8/3006 and H8/3007 can be used only in modes 1 to 4. The inputs at the mode pins must
select one of these four modes. The inputs at the mode pins must not be changed during operation.
When changing the mode, the chip must be placed in the reset state before the mode pin inputs are
changed.

58
3.1.2
Register Configuration
The H8/3006 and H8/3007 have a mode control register (MDCR) that indicates the inputs at the
mode pins (MD
2
to MD
0
), and a system control register (SYSCR). Table 3-2 summarizes these
registers.
Table 3-2
Registers
Address*
Name
Abbreviation
R/W
Initial Value
H'EE011
Mode control register
MDCR
R
Undetermined
H'EE012
System control register
SYSCR
R/W
H'09
Note:
*
Lower 20 bits of the address in advanced mode.
3.2
Mode Control Register (MDCR)
MDCR is an 8-bit read-only register that indicates the current operating mode of the
H8/3006 and H8/3007.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
0
--
4
--
0
--
3
--
0
--
0
MDS0
--
R
*
2
MDS2
--
R
1
MDS1
--
R
*
*
Reserved bits
Mode select 2 to 0
Bits indicating the current
operating mode
Note: Determined by pins MD to MD .
*
2
0
Bits 7 and 6--Reserved: These bits can not be modified and are always read as 1.
Bits 5 to 3--Reserved: These bits can not be modified and are always read as 0.
Bits 2 to 0--Mode Select 2 to 0 (MDS2 to MDS0): These bits indicate the logic levels at pins
MD
2
to MD
0
(the current operating mode). MDS2 to MDS0 correspond to MD
2
to MD
0
. MDS2 to
MDS0 are read-only bits. The mode pin (MD
2
to MD
0
) levels are latched into these bits when
MDCR is read.
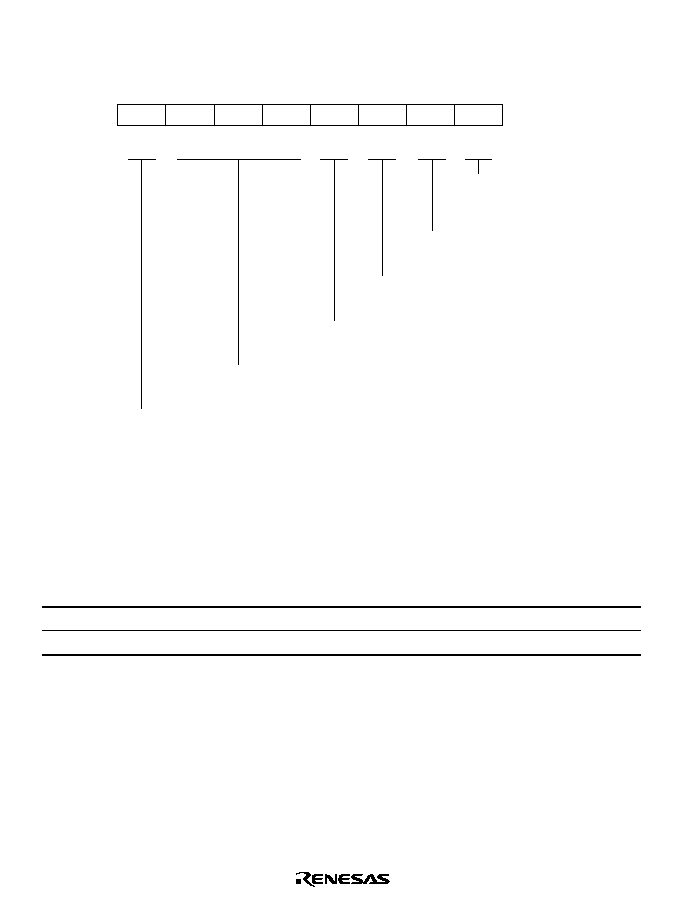
59
3.3
System Control Register (SYSCR)
SYSCR is an 8-bit register that controls the operation of the H8/3006 and H8/3007.
Bit
Initial value
Read/Write
7
SSBY
0
R/W
6
STS2
0
R/W
5
STS1
0
R/W
4
STS0
0
R/W
3
UE
1
R/W
0
RAME
1
R/W
2
NMIEG
0
R/W
1
SSOE
0
R/W
Software standby
Enables transition to software standby mode
User bit enable
Selects whether to use the UI bit in CCR
as a user bit or an interrupt mask bit
NMI edge select
Selects the valid edge
of the NMI input
RAM enable
Enables or
disables
on-chip RAM
Standby timer select 2 to 0
These bits select the waiting time at
recovery from software standby mode
Selects the output state of the address bus
and bus control signals in software standby mode
Software standby output port enable
Bit 7--Software Standby (SSBY): Enables transition to software standby mode. (For further
information about software standby mode see section 19, Power-Down State.)
When software standby mode is exited by an external interrupt and a transition is made to normal
operation, this bit remains set to 1. To clear this bit, write 0.
Bit 7
SSBY
Description
0
SLEEP instruction causes transition to sleep mode
(Initial value)
1
SLEEP instruction causes transition to software standby mode
60
Bits 6 to 4--Standby Timer Select 2 to 0 (STS2 to STS0): These bits select the length of time
the CPU and on-chip supporting modules wait for the internal clock oscillator to settle when
software standby mode is exited by an external interrupt.
When using a crystal oscillator, set these bits so that the waiting time will be at least 7 ms at the
system clock rate.
For further information about waiting time selection, see section 19.4.3, Selection of Waiting
Time for Exit from Software Standby Mode.
Bit 6
STS2
Bit 5
STS1
Bit 4
STS0
Description
0
0
0
Waiting time = 8,192 states
(Initial value)
0
0
1
Waiting time = 16,384 states
0
1
0
Waiting time = 32,768 states
0
1
1
Waiting time = 65,536 states
1
0
0
Waiting time = 131,072 states
1
0
1
Waiting time = 262,144 states
1
1
0
Waiting time = 1,024 states
1
1
1
Illegal setting
Bit 3--User Bit Enable (UE): Selects whether to use the UI bit in the condition code register as a
user bit or an interrupt mask bit.
Bit 3
UE
Description
0
UI bit in CCR is used as an interrupt mask bit
1
UI bit in CCR is used as a user bit
(Initial value)
Bit 2--NMI Edge Select (NMIEG): Selects the valid edge of the NMI input.
Bit 2
NMIEG
Description
0
An interrupt is requested at the falling edge of NMI
(Initial value)
1
An interrupt is requested at the rising edge of NMI
61
Bit 1--Software Standby Output Port Enable (SSOE): Specifies whether the address bus and
bus control signals (
CS
0
to
CS
7
,
AS, RD, HWR, LWR, UCAS, LCAS, and RFSH) are kept as
outputs or fixed high, or placed in the high-impedance state in software standby mode.
Bit 1
SSOE
Description
0
In software standby mode, the address bus and bus control signals are all high-
impedance
(Initial value)
1
In software standby mode, the address bus retains its output state and bus control
signals are fixed high
Bit 0--RAM Enable (RAME): Enables or disables the on-chip RAM. The RAME bit is
initialized by the rising edge of the
RES signal. It is not initialized in software standby mode.
Bit 0
RAME
Description
0
On-chip RAM is disabled
1
On-chip RAM is enabled
(Initial value)

62
3.4
Operating Mode Descriptions
3.4.1
Mode 1
A maximum 1-Mbyte address space can be accessed. The initial bus mode after a reset is 8 bits,
with 8-bit access to all areas. If at least one area is designated for 16-bit access in ABWCR, the
bus mode switches to 16 bits.
3.4.2
Mode 2
A maximum 1-Mbyte address space can be accessed. The initial bus mode after a reset is 16 bits,
with 16-bit access to all areas. If all areas are designated for 8-bit access in ABWCR, the bus
mode switches to 8 bits.
3.4.3
Mode 3
Part of port A function as address pins A
23
to A
20
, permitting access to a maximum 16-Mbyte
address space. The initial bus mode after a reset is 8 bits, with 8-bit access to all areas. If at least
one area is designated for 16-bit access in ABWCR, the bus mode switches to 16 bits. A
23
to A
21
are valid when 0 is written in bits 7 to 5 of the bus release control register (BRCR). (In this mode
A
20
is always used for address output.)
3.4.4
Mode 4
Part of port A function as address pins A
23
to A
20
, permitting access to a maximum 16-Mbyte
address space. The initial bus mode after a reset is 16 bits, with 16-bit access to all areas. If all
areas are designated for 8-bit access in ABWCR, the bus mode switches to 8 bits. A
23
to A
21
are
valid when 0 is written in bits 7 to 5 of BRCR. (In this mode A
20
is always used for address
output.)

63
3.5
Pin Functions in Each Operating Mode
The pin functions of port 4 and port A vary depending on the operating mode. Table 3-3 indicates
their functions in each operating mode.
Table 3-3 Pin Functions in Each Mode
Port
Mode 1
Mode 2
Mode 3
Mode 4
Port 4
P4
7
to P4
0
*
1
D
7
to D
0
*
1
P4
7
to P4
0
*
1
D
7
to D
0
*
1
Port A
PA
7
to PA
4
PA
7
to PA
4
PA
6
to PA
4
, A
20
*
2
PA
6
to PA
4
, A
20
*
2
Notes: 1. Initial state. The bus mode can be switched by settings in ABWCR. These pins function
as P4
7
to P4
0
in 8-bit bus mode, and as D
7
to D
0
in 16-bit bus mode.
2. Initial state. A
20
is always an address output pin. PA
6
to PA
4
are switched over to A
23
to
A
21
output by writing 0 in bits 7 to 5 of BRCR.
3.6
Memory Map in Each Operating Mode
Figure 3-1, 3-2 show a memory maps of the H8/3006 and H8/3007. The address space is divided
into eight areas.
The initial bus mode differs between modes 1 and 2, and also between modes 3 and 4.
The address locations of the on-chip RAM and internal I/O registers differ between the 1-Mbyte
modes (modes 1, 2), and the 16-Mbyte modes (modes 3, 4). The address range specifiable by the
CPU in the 8- and 16-bit absolute addressing modes (@aa:8 and @aa:16) also differs.
3.6.1
Note on Reserved Areas
The memory map of the H8/3006 and H8/3007 includes reserved areas to which read/write access
is prohibited. Note that normal operation is not guaranteed if the following reserved areas are
accessed.
The internal I/O register space of the H8/3006 and H8/3007 includes a reserved area to which
access is prohibited. For details, see Appendix B, Internal I/O Registers.
64
H'00000
H'000FF
H'07FFF
Memory-indirect
branch addresses
16-bit absolute
addresses
Modes 1 and 2
(1 Mbyte)
H'1FFFF
H'20000
H'3FFFF
H'40000
H'5FFFF
H'60000
H'7FFFF
H'80000
H'9FFFF
H'A0000
H'BFFFF
H'C0000
H'DFFFF
H'E0000
Area 0
Area 1
Area 2
Area 3
Area 4
Area 5
Area 6
Area 7
External address
space
External address
space
Vector area
On-chip RAM*
On-chip RAM*
8-bit absolute addresses
16-bit absolute addresses
H'F8000
H'FEF1F
H'FEF20
H'FFF00
H'FFF1F
H'FFF20
H'FFFE9
H'FFFEA
H'FFFFF
Modes 3 and 4
(16 Mbytes)
H'000000
H'0000FF
H'007FFF
Memory-indirect
branch addresses
16-bit absolute
addresses
H'1FFFFF
H'200000
Area 0
Area 1
Area 2
Area 3
Area 4
Area 5
Area 6
Area 7
External
address
space
Vector area
External
address
space
8-bit absolute addresses
16-bit absolute addresses
H'FF8000
H'FFEF1F
H'FFEF20
H'FFFF1F
H'FFFF20
H'FFFF00
H'FFFFE9
H'FFFFEA
H'FFFFFF
H'3FFFFF
H'400000
H'5FFFFF
H'600000
H'7FFFFF
H'800000
H'9FFFFF
H'A00000
H'BFFFFF
H'C00000
H'DFFFFF
H'E00000
H'FEE000
H'FEE0FF
Note: * External addresses can be accessed by disabling on-chip RAM.
Internal I/O
registers (1)
Internal I/O
registers (1)
Internal I/O
registers (2)
Internal I/O
registers (2)
External
address
space
H'EE000
H'EE0FF
External address
space
Figure 3-1 H8/3007 Memory Map in Each Operating Mode
65
H'00000
H'000FF
H'07FFF
Memory-indirect
branch addresses
16-bit absolute
addresses
Modes 1 and 2
(1 Mbyte)
H'1FFFF
H'20000
H'3FFFF
H'40000
H'5FFFF
H'60000
H'7FFFF
H'80000
H'9FFFF
H'A0000
H'BFFFF
H'C0000
H'DFFFF
H'E0000
Area 0
Area 1
Area 2
Area 3
Area 4
Area 5
Area 6
Area 7
External address
space
External address
space
External address
space
Vector area
On-chip RAM*
On-chip RAM*
8-bit absolute addresses
16-bit absolute addresses
H'F8000
H'FF71F
H'FF720
H'FFF00
H'FFF1F
H'FFF20
H'FFFE9
H'FFFEA
H'FFFFF
Modes 3 and 4
(16 Mbytes)
H'000000
H'0000FF
H'007FFF
Memory-indirect
branch addresses
16-bit absolute
addresses
H'1FFFFF
H'200000
Area 0
Area 1
Area 2
Area 3
Area 4
Area 5
Area 6
Area 7
External
address
space
Vector area
External
address
space
8-bit absolute addresses
16-bit absolute addresses
H'FF8000
H'FFF71F
H'FFF720
H'FFFF1F
H'FFFF20
H'FFFF00
H'FFFFE9
H'FFFFEA
H'FFFFFF
H'3FFFFF
H'400000
H'5FFFFF
H'600000
H'7FFFFF
H'800000
H'9FFFFF
H'A00000
H'BFFFFF
H'C00000
H'DFFFFF
H'E00000
H'FEE000
H'FEE0FF
Internal I/O
registers (1)
Internal I/O
registers (1)
Internal I/O
registers (2)
Internal I/O
registers (2)
External
address
space
H'EE000
H'EE0FF
Note: * External addresses can be accessed by disabling on-chip RAM.
Figure 3-2 H8/3006 Memory Map in Each Operating Mode
67
Section 4 Exception Handling
4.1
Overview
4.1.1
Exception Handling Types and Priority
As table 4-1 indicates, exception handling may be caused by a reset, interrupt, or trap instruction.
Exception handling is prioritized as shown in table 4-1. If two or more exceptions occur
simultaneously, they are accepted and processed in priority order. Trap instruction exceptions are
accepted at all times in the program execution state.
Table 4-1
Exception Types and Priority
Priority
Exception Type
Start of Exception Handling
High
Reset
Starts immediately after a low-to-high transition at the
RES
pin
Interrupt
Interrupt requests are handled when execution of the current
instruction or handling of the current exception is completed
Low
Trap instruction (TRAPA) Started by execution of a trap instruction (TRAPA)
4.1.2
Exception Handling Operation
Exceptions originate from various sources. Trap instructions and interrupts are handled as follows.
1. The program counter (PC) and condition code register (CCR) are pushed onto the stack.
2. The CCR interrupt mask bit is set to 1.
3. A vector address corresponding to the exception source is generated, and program execution
starts from that address.
Note: For a reset exception, steps 2 and 3 above are carried out.
68
4.1.3
Exception Vector Table
The exception sources are classified as shown in figure 4-1. Different vectors are assigned to
different exception sources. Table 4-2 lists the exception sources and their vector addresses.
Exception
sources
∑ Reset
∑ Interrupts
∑ Trap instruction
External interrupts:
Internal interrupts:
NMI, IRQ to IRQ
36 interrupts from on-chip
supporting modules
0 5
Figure 4-1 Exception Sources
69
Table 4-2
Exception Vector Table
Vector Address*
1
Exception Source
Vector Number
Advanced Mode
Normal Mode*
3
Reset
0
H'0000 to H'0003
H'0000 to H'0001
Reserved for system use
1
H'0004 to H'0007
H'0002 to H'0003
2
H'0008 to H'000B
H'0004 to H'0005
3
H'000C to H'000F
H'0006 to H'0007
4
H'0010 to H'0013
H'0008 to H'0009
5
H'0014 to H'0017
H'000A to H'000B
6
H'0018 to H'001B
H'000C to H'000D
External interrupt (NMI)
7
H'001C to H'001F
H'000E to H'000F
Trap instruction (4 sources)
8
H'0020 to H'0023
H'0010 to H'0011
9
H'0024 to H'0027
H'0012 to H'0013
10
H'0028 to H'002B
H'0014 to H'0015
11
H'002C to H'002F
H'0016 to H'0017
External interrupt IRQ
0
12
H'0030 to H'0033
H'0018 to H'0019
External interrupt IRQ
1
13
H'0034 to H'0037
H'001A to H'001B
External interrupt IRQ
2
14
H'0038 to H'003B
H'001C to H'001D
External interrupt IRQ
3
15
H'003C to H'003F
H'001E to H'001F
External interrupt IRQ
4
16
H'0040 to H'0043
H'0020 to H'0021
External interrupt IRQ
5
17
H'0044 to H'0047
H'0022 to H'0023
Reserved for system use
18
H'0048 to H'004B
H'0024 to H'0025
19
H'004C to H'004F
H'0026 to H'0027
Internal interrupts*
2
20
to
63
H'0050 to H'0053
to
H'00FC to H'00FF
H'0028 to H'0029
to
H'007E to H'007F
Notes: 1. Lower 16 bits of the address.
2. For the internal interrupt vectors, see section 5.3.3, Interrupt Vector Table.
3. Normal mode is not available in the H8/3006 and H8/3007.
70
4.2
Reset
4.2.1 Overview
A reset is the highest-priority exception. When the
RES pin goes low, all processing halts and the
chip enters the reset state. A reset initializes the internal state of the CPU and the registers of the
on-chip supporting modules. Reset exception handling begins when the
RES pin changes from
low to high.
The chip can also be reset by overflow of the watchdog timer. For details see section 12,
Watchdog Timer.
4.2.2 Reset Sequence
The chip enters the reset state when the
RES pin goes low.
To ensure that the chip is properly reset, hold the
RES pin low for at last 20 ms at power-up. To
reset the chip during operation, hold the
RES pin low for at least 10 system clock (¯) cycles. See
appendix D.2, Pin States at Reset, for the states of the pins in the reset state.
When the
RES pin goes high after being held low for the necessary time, the chip starts reset
exception handling as follows.
∑
The internal state of the CPU and the registers of the on-chip supporting modules are
initialized, and the I bit is set to 1 in CCR.
∑
The contents of the reset vector address (H'0000 to H'0003) are read, and program execution
starts from the address indicated in the vector address.
Figure 4-2 shows the reset sequence in modes 1 and 3. Figure 4-3 shows the reset sequence in
modes 2 and 4.
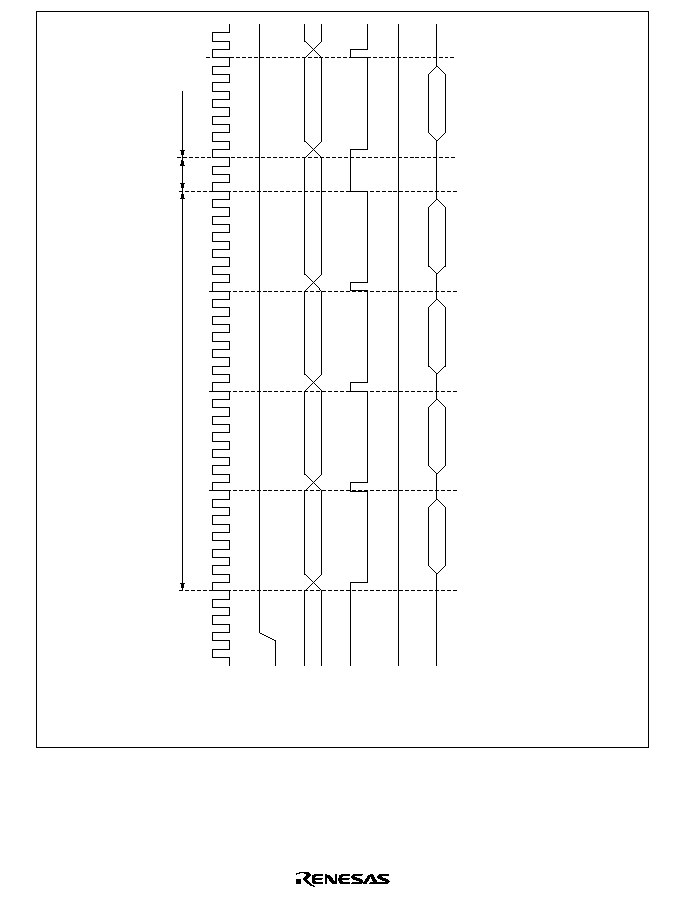
71
Address
bus
RES
RD
HWR
D to D
15
8
V
ector fetch
Internal
processing
Prefetch of
first program
instruction
(1), (3), (5), (7)
(2), (4), (6), (8)
(9)
(10)
Note:
After a reset, the wait-state controller inserts three wait states in every bus cycle.
Address of reset vector: (1) = H'000000, (3) = H'000001, (5) = H'000002, (7) = H'000003
Start address (contents of reset exception handling vector address)
Start address
First instruction of program
High
(1)
(3)
(5)
(7)
(9)
(2)
(4)
(6)
(8)
(10)
LWR
,
Figure 4-2 Reset Sequence (Modes 1 and 3)
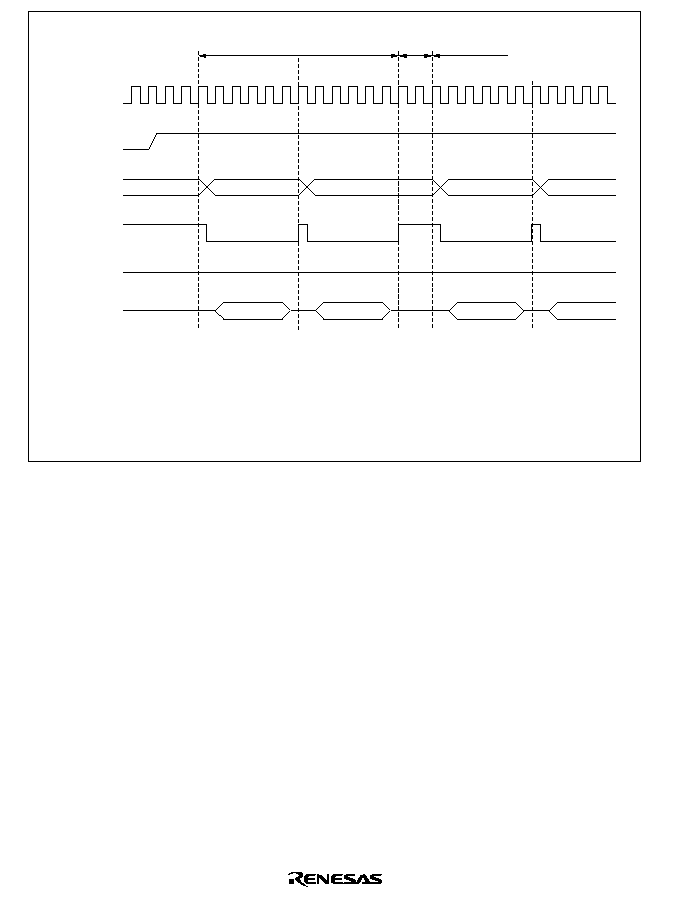
72
Address bus
RES
RD
HWR
D to D
15
0
Vector fetch
Internal
processing
Prefetch of first
program instruction
(1), (3)
(2), (4)
(5)
(6)
Note: After a reset, the wait-state controller inserts three wait states in every bus cycle.
High
LWR
,
Address of reset vector: (1) = H'000000, (3) = H'000002
Start address (contents of reset exception handling vector address)
Start address
First instruction of program
(2)
(4)
(3)
(1)
(5)
(6)
Figure 4-3 Reset Sequence (Modes 2 and 4)
4.2.3
Interrupts after Reset
If an interrupt is accepted after a reset but before the stack pointer (SP) is initialized, PC and CCR
will not be saved correctly, leading to a program crash. To prevent this, all interrupt requests,
including NMI, are disabled immediately after a reset. The first instruction of the program is
always executed immediately after the reset state ends. This instruction should initialize the stack
pointer (example: MOV.L #xx:32, SP).
73
4.3
Interrupts
Interrupt exception handling can be requested by seven external sources (NMI, IRQ
0
to IRQ
5
), and
36 internal sources in the on-chip supporting modules. Figure 4-4 classifies the interrupt sources
and indicates the number of interrupts of each type.
The on-chip supporting modules that can request interrupts are the watchdog timer (WDT),
DRAM interface, 16-bit timer, 8-bit timer, DMA controller (DMAC), serial communication
interface (SCI), and A/D converter. Each interrupt source has a separate vector address.
NMI is the highest-priority interrupt and is always accepted. Interrupts are controlled by the
interrupt controller. The interrupt controller can assign interrupts other than NMI to two priority
levels, and arbitrate between simultaneous interrupts. Interrupt priorities are assigned in interrupt
priority registers A and B (IPRA and IPRB) in the interrupt controller.
For details on interrupts see section 5, Interrupt Controller.
Interrupts
External interrupts
Internal interrupts
NMI (1)
IRQ to IRQ (6)
WDT (1)
DRAM interface
*2
(1)
16-bit timer (9)
8-bit timer (8)
DMAC (4)
SCI (12)
A/D converter (1)
*1
Notes: Numbers in parentheses are the number of interrupt sources.
1.
2.
When the watchdog timer is used as an interval timer, it generates an interrupt
request at every counter overflow.
When the DRAM interface is used as an interval timer, it generates an interrupt request
at compare match.
0 5
Figure 4-4 Interrupt Sources and Number of Interrupts
4.4
Trap Instruction
Trap instruction exception handling starts when a TRAPA instruction is executed. If the UE bit is
set to 1 in the system control register (SYSCR), the exception handling sequence sets the I bit to 1
in CCR. If the UE bit is 0, the I and UI bits are both set to 1. The TRAPA instruction fetches a
start address from a vector table entry corresponding to a vector number from 0 to 3, which is
specified in the instruction code.
74
4.5
Stack Status after Exception Handling
Figure 4-5 shows the stack after completion of trap instruction exception handling and interrupt
exception handling.
SP-4
SP-3
SP-2
SP-1
SP (ER7)
SP (ER7)
SP+1
SP+2
SP+3
SP+4
Before exception handling
After exception handling
Stack area
CCR
PC
E
PC
H
PC
L
Even address
Pushed on stack
Legend
PC
E
:
PC
H
:
PC
L
:
CCR:
SP:
Notes: 1. PC indicates the address of the first instruction that will be executed after return.
2. Registers must be saved in word or longword size at even addresses.
Bits 23 to 16 of program counter (PC)
Bits 15 to 8 of program counter (PC)
Bits 7 to 0 of program counter (PC)
Condition code register
Stack pointer
Figure 4-5 Stack after Completion of Exception Handling
4.6
Notes on Stack Usage
When accessing word data or longword data, the H8/3006 and H8/3007 regards the lowest address
bit as 0. The stack should always be accessed by word access or longword access, and the value of
the stack pointer (SP: ER7) should always be kept even.
Use the following instructions to save registers:
PUSH.W Rn
(MOV.W Rn, @≠SP)
PUSH.L ERn
(MOV.L ERn, @≠SP)
Use the following instructions to restore registers:
POP.W Rn
(MOV.W @SP+, Rn)
POP.L ERn
(MOV.L @SP+, ERn)

75
Setting SP to an odd value may lead to a malfunction. Figure 4-6 shows an example of what
happens when the SP value is odd.
TRAPA instruction executed
CCR
Legend
CCR:
PC:
R1L:
SP:
SP
PC
R1L
PC
SP
SP
MOV. B R1L, @-ER7
SP set to H'FFFEFF
Data saved above SP
CCR contents lost
Condition code register
Program counter
General register R1L
Stack pointer
Note: The diagram illustrates modes 3 and 4.
H'FFFEFA
H'FFFEFB
H'FFFEFC
H'FFFEFD
H'FFFEFF
Figure 4-6 Operation when SP Value is Odd

77
Section 5 Interrupt Controller
5.1
Overview
5.1.1
Features
The interrupt controller has the following features:
∑
Interrupt priority registers (IPRs) for setting interrupt priorities
Interrupts other than NMI can be assigned to two priority levels on a module-by-module basis
in interrupt priority registers A and B (IPRA and IPRB).
∑
Three-level enable/disable state setting possible by means of the I and UI bits in the CPU's
condition code register (CCR) and the UE bit in the system control register (SYSCR)
∑
Seven external interrupt pins
NMI has the highest priority and is always accepted; either the rising or falling edge can be
selected. For each of IRQ
0
to IRQ
5
, sensing of the falling edge or level sensing can be selected
independently.
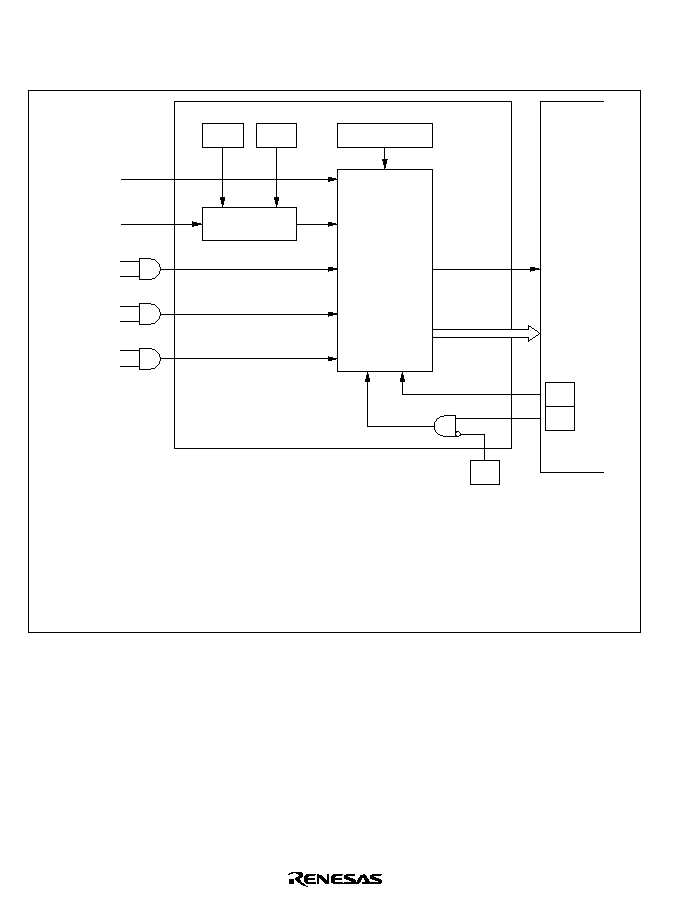
78
5.1.2
Block Diagram
Figure 5-1 shows a block diagram of the interrupt controller.
ISCR
IER
IPRA, IPRB
.
.
.
OVF
TME
TEI
TEIE
.
.
.
.
.
.
.
CPU
CCR
I
UI
UE
SYSCR
ISCR:
IER:
ISR:
IPRA:
IPRB:
SYSCR:
NMI
input
IRQ input
IRQ input
section ISR
Interrupt controller
Priority
decision logic
Interrupt
request
Vector
number
IRQ sense control register
IRQ enable register
IRQ status register
Interrupt priority register A
Interrupt priority register B
System control register
Legend
Figure 5-1 Interrupt Controller Block Diagram
79
5.1.3
Pin Configuration
Table 5-1 lists the interrupt pins.
Table 5-1
Interrupt Pins
Name
Abbreviation I/O
Function
Nonmaskable interrupt
NMI
Input
Nonmaskable interrupt, rising edge or
falling edge selectable
External interrupt request 5 to 0
IRQ
5
to
IRQ
0
Input
Maskable interrupts, falling edge or level
sensing selectable
5.1.4
Register Configuration
Table 5-2 lists the registers of the interrupt controller.
Table 5-2
Interrupt Controller Registers
Address*
1
Name
Abbreviation
R/W
Initial Value
H'EE012
System control register
SYSCR
R/W
H'09
H'EE014
IRQ sense control register
ISCR
R/W
H'00
H'EE015
IRQ enable register
IER
R/W
H'00
H'EE016
IRQ status register
ISR
R/(W)*
2
H'00
H'EE018
Interrupt priority register A
IPRA
R/W
H'00
H'EE019
Interrupt priority register B
IPRB
R/W
H'00
Notes: 1. Lower 20 bits of the address in advanced mode.
2. Only 0 can be written, to clear flags.
80
5.2
Register Descriptions
5.2.1
System Control Register (SYSCR)
SYSCR is an 8-bit readable/writable register that controls software standby mode, selects the
action of the UI bit in CCR, selects the NMI edge, and enables or disables the on-chip RAM.
Only bits 3 and 2 are described here. For the other bits, see section 3.3, System Control Register
(SYSCR).
SYSCR is initialized to H'09 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bit
Initial value
Read/Write
7
SSBY
0
R/W
6
STS2
0
R/W
5
STS1
0
R/W
4
STS0
0
R/W
3
UE
1
R/W
0
RAME
1
R/W
2
NMIEG
0
R/W
1
SSOE
0
R/W
Software standby
Standby timer
select 2 to 0
User bit enable
Selects whether to use the UI bit in
CCR as a user bit or interrupt mask bit
NMI edge select
Selects the NMI input edge
Software standby
output port enable
RAM enable
81
Bit 3--User Bit Enable (UE): Selects whether to use the UI bit in CCR as a user bit or an
interrupt mask bit.
Bit 3
UE
Description
0
UI bit in CCR is used as interrupt mask bit
1
UI bit in CCR is used as user bit
(Initial value)
Bit 2--NMI Edge Select (NMIEG): Selects the NMI input edge.
Bit 2
NMIEG
Description
0
Interrupt is requested at falling edge of NMI input
(Initial value)
1
Interrupt is requested at rising edge of NMI input
5.2.2
Interrupt Priority Registers A and B (IPRA, IPRB)
IPRA and IPRB are 8-bit readable/writable registers that control interrupt priority.
82
Interrupt Priority Register A (IPRA): IPRA is an 8-bit readable/writable register in which
interrupt priority levels can be set.
Bit
Initial value
Read/Write
7
IPRA7
0
R/W
6
IPRA6
0
R/W
5
IPRA5
0
R/W
4
IPRA4
0
R/W
3
IPRA3
0
R/W
0
IPRA0
0
R/W
2
IPRA2
0
R/W
1
IPRA1
0
R/W
Priority level A7
Selects the priority level of IRQ interrupt requests
Priority level A3
Selects the priority level of WDT,
DRAM interface, and A/D converter
interrupt requests
Priority level A2
Selects the priority level of
16-bit timer channel 0 interrupt
requests
Priority level A1
Selects the priority level
of 16-bit timer channel 1
interrupt requests
Priority
level A0
Selects the
priority level
of 16-bit timer
channel 2
interrupt
requests
Selects the priority level of IRQ interrupt requests
Priority level A6
Selects the priority level of IRQ and IRQ interrupt requests
Priority level A5
Selects the priority level of IRQ and IRQ
interrupt requests
Priority level A4
0
1
2
3
4
5
IPRA is initialized to H'00 by a reset and in hardware standby mode.
83
Bit 7--Priority Level A7 (IPRA7): Selects the priority level of IRQ
0
interrupt requests.
Bit 7
IPRA7
Description
0
IRQ
0
interrupt requests have priority level 0 (low priority)
(Initial value)
1
IRQ
0
interrupt requests have priority level 1 (high priority)
Bit 6--Priority Level A6 (IPRA6): Selects the priority level of IRQ
1
interrupt requests.
Bit 6
IPRA6
Description
0
IRQ
1
interrupt requests have priority level 0 (low priority)
(Initial value)
1
IRQ
1
interrupt requests have priority level 1 (high priority)
Bit 5--Priority Level A5 (IPRA5): Selects the priority level of IRQ
2
and IRQ
3
interrupt requests.
Bit 5
IPRA5
Description
0
IRQ
2
and IRQ
3
interrupt requests have priority level 0 (low priority)
(Initial value)
1
IRQ
2
and IRQ
3
interrupt requests have priority level 1 (high priority)
Bit 4--Priority Level A4 (IPRA4): Selects the priority level of IRQ
4
and IRQ
5
interrupt requests.
Bit 4
IPRA4
Description
0
IRQ
4
and IRQ
5
interrupt requests have priority level 0 (low priority)
(Initial value)
1
IRQ
4
and IRQ
5
interrupt requests have priority level 1 (high priority)
84
Bit 3--Priority Level A3 (IPRA3): Selects the priority level of WDT, DRAM interface, and A/D
converter interrupt requests.
Bit 3
IPRA3
Description
0
WDT, DRAM interface, and A/D converter interrupt requests have priority level 0
(low priority)
(Initial value)
1
WDT, DRAM interface, and A/D converter interrupt requests have priority level 1
(high priority)
Bit 2--Priority Level A2 (IPRA2): Selects the priority level of 16-bit timer channel 0 interrupt
requests.
Bit 2
IPRA2
Description
0
16-bit timer channel 0 interrupt requests have priority level 0 (low priority) (Initial value)
1
16-bit timer channel 0 interrupt requests have priority level 1 (high priority)
Bit 1--Priority Level A1 (IPRA1): Selects the priority level of 16-bit timer channel 1 interrupt
requests.
Bit 1
IPRA1
Description
0
16-bit timer channel 1 interrupt requests have priority level 0 (low priority) (Initial value)
1
16-bit timer channel 1 interrupt requests have priority level 1 (high priority)
Bit 0--Priority Level A0 (IPRA0): Selects the priority level of 16-bit timer channel 2 interrupt
requests.
Bit 0
IPRA0
Description
0
16-bit timer channel 2 interrupt requests have priority level 0 (low priority) (Initial value)
1
16-bit timer channel 2 interrupt requests have priority level 1 (high priority)
85
Interrupt Priority Register B (IPRB): IPRB is an 8-bit readable/writable register in which
interrupt priority levels can be set.
Bit
Initial value
Read/Write
7
IPRB7
0
R/W
6
IPRB6
0
R/W
5
IPRB5
0
R/W
4
--
0
R/W
3
IPRB3
0
R/W
0
--
0
R/W
2
IPRB2
0
R/W
1
IPRB1
0
R/W
Priority level B7
Selects the priority level of 8-bit timer channel 0, 1 interrupt requests
Priority level B3
Selects the priority level of SCI
channel 0 interrupt requests
Priority level B2
Selects the priority level of
SCI channel 1 interrupt requests
Priority level B1
Selects the priority level
of SCI channel 2 interrupt
requests
Reserved bit
Selects the priority level of 8-bit timer channel 2, 3 interrupt requests
Priority level B6
Selects the priority level of DMAC
interrupt requests (channels 0 and 1)
Priority level B5
Reserved bit
IPRB is initialized to H'00 by a reset and in hardware standby mode.
86
Bit 7--Priority Level B7 (IPRB7): Selects the priority level of 8-bit timer channel 0, 1 interrupt
requests.
Bit 7
IPRB7
Description
0
8-bit timer channel 0, 1 interrupt requests have priority level 0 (low priority)(Initial value)
1
8-bit timer channel 0, 1 interrupt requests have priority level 1 (high priority)
Bit 6--Priority Level B6 (IPRB6): Selects the priority level of 8-bit timer channel 2, 3 interrupt
requests.
Bit 6
IPRB6
Description
0
8-bit timer channel 2, 3 interrupt requests have priority level 0 (low priority)(Initial value)
1
8-bit timer channel 2, 3 interrupt requests have priority level 1 (high priority)
Bit 5--Priority Level B5 (IPRB5): Selects the priority level of DMAC interrupt requests
(channels 0 and 1).
Bit 5
IPRB5
Description
0
DMAC interrupt requests (channels 0 and 1) have priority level 0
(Initial value)
(low priority)
1
DMAC interrupt requests (channels 0 and 1) have priority level 1 (high priority)
Bit 4--Reserved: This bit can be written and read, but it does not affect interrupt priority.
87
Bit 3--Priority Level B3 (IPRB3): Selects the priority level of SCI channel 0 interrupt requests.
Bit 3
IPRB3
Description
0
SCI0 interrupt requests have priority level 0 (low priority)
(Initial value)
1
SCI0 interrupt requests have priority level 1 (high priority)
Bit 2--Priority Level B2 (IPRB2): Selects the priority level of SCI channel 1 interrupt requests.
Bit 2
IPRB2
Description
0
SCI1 interrupt requests have priority level 0 (low priority)
(Initial value)
1
SCI1 interrupt requests have priority level 1 (high priority)
Bit 1--Priority Level B1 (IPRB1): Selects the priority level of SCI channel 2 interrupt requests.
Bit 1
IPRB1
Description
0
SCI channel 2 interrupt requests have priority level 0 (low priority)
(Initial value)
1
SCI channel 2 interrupt requests have priority level 1 (high priority)
Bit 0--Reserved: This bit can be written and read, but it does not affect interrupt priority.
88
5.2.3
IRQ Status Register (ISR)
ISR is an 8-bit readable/writable register that indicates the status of IRQ
0
to IRQ
5
interrupt
requests.
Bit
Initial value
Read/Write
7
--
0
--
These bits indicate IRQ to IRQ
interrupt request status
Note: Only 0 can be written, to clear flags.
*
6
--
0
--
5
IRQ5F
0
R/(W)
*
4
IRQ4F
0
R/(W)
*
3
IRQ3F
0
R/(W)
*
2
IRQ2F
0
R/(W)
*
1
IRQ1F
0
R/(W)
*
0
IRQ0F
0
R/(W)
*
5
0
IRQ to IRQ flags
5
0
Reserved bits
ISR is initialized to H'00 by a reset and in hardware standby mode.
Bits 7 and 6--Reserved: These bits can not be modified and are always read as 0.
Bits 5 to 0--IRQ
5
to IRQ
0
Flags (IRQ5F to IRQ0F): These bits indicate the status of IRQ
5
to
IRQ
0
interrupt requests.
Bits 5 to 0
IRQ5F to IRQ0F Description
0
[Clearing conditions]
(Initial value)
∑
0 is written in IRQnF after reading the IRQnF flag when IRQnF = 1.
∑
IRQnSC = 0,
IRQn
input is high, and interrupt exception handling is carried
out.
∑
IRQnSC = 1 and IRQn interrupt exception handling is carried out.
1
[Setting conditions]
∑
IRQnSC = 0 and
IRQn
input is low.
∑
IRQnSC = 1 and
IRQn
input changes from high to low.
Note: n = 5 to 0

89
5.2.4
IRQ Enable Register (IER)
IER is an 8-bit readable/writable register that enables or disables IRQ
0
to IRQ
5
interrupt requests.
Bit
Initial value
Read/Write
7
--
0
R/W
These bits enable or disable IRQ to IRQ interrupts
6
--
0
R/W
5
IRQ5E
0
R/W
4
IRQ4E
0
R/W
3
IRQ3E
0
R/W
2
IRQ2E
0
R/W
1
IRQ1E
0
R/W
0
IRQ0E
0
R/W
5
0
IRQ to IRQ enable
5
0
Reserved bits
IER is initialized to H'00 by a reset and in hardware standby mode.
Bits 7 and 6--Reserved: These bits can be written and read, but they do not enable or disable
interrupts.
Bits 5 to 0--IRQ
5
to IRQ
0
Enable (IRQ5E to IRQ0E): These bits enable or disable
IRQ
5
to IRQ
0
interrupts.
Bits 5 to 0
IRQ5E to IRQ0E Description
0
IRQ
5
to IRQ
0
interrupts are disabled
(Initial value)
1
IRQ
5
to IRQ
0
interrupts are enabled
90
5.2.5
IRQ Sense Control Register (ISCR)
ISCR is an 8-bit readable/writable register that selects level sensing or falling-edge sensing of the
inputs at pins
IRQ
5
to
IRQ
0
.
Bit
Initial value
Read/Write
7
--
0
R/W
These bits select level sensing or falling-edge
sensing for IRQ to IRQ interrupts
6
--
0
R/W
5
IRQ5SC
0
R/W
4
IRQ4SC
0
R/W
3
IRQ3SC
0
R/W
2
IRQ2SC
0
R/W
1
IRQ1SC
0
R/W
0
IRQ0SC
0
R/W
5
0
IRQ to IRQ sense control
5
0
Reserved bits
ISCR is initialized to H'00 by a reset and in hardware standby mode.
Bits 7 and 6--Reserved: These bits can be written and read, but they do not select level or
falling-edge sensing.
Bits 5 to 0--IRQ
5
to IRQ
0
Sense Control (IRQ5SC to IRQ0SC): These bits select whether
interrupts IRQ
5
to IRQ
0
are requested by level sensing of pins
IRQ
5
to
IRQ
0
, or by falling-edge
sensing.
Bits 5 to 0
IRQ5SC to IRQ0SC Description
0
Interrupts are requested when
IRQ
5
to
IRQ
0
inputs are low
(Initial value)
1
Interrupts are requested by falling-edge input at
IRQ
5
to
IRQ
0

91
5.3
Interrupt Sources
The interrupt sources include external interrupts (NMI, IRQ
0
to IRQ
5
) and 36 internal interrupts.
5.3.1
External Interrupts
There are seven external interrupts: NMI, and IRQ
0
to IRQ
5
. Of these, NMI, IRQ
0
, IRQ
1
, and
IRQ
2
can be used to exit software standby mode.
NMI: NMI is the highest-priority interrupt and is always accepted, regardless of the states of the I
and UI bits in CCR. The NMIEG bit in SYSCR selects whether an interrupt is requested by the
rising or falling edge of the input at the NMI pin. NMI interrupt exception handling has vector
number 7.
IRQ
0
to IRQ
5
Interrupts: These interrupts are requested by input signals at pins
IRQ
0
to
IRQ
5
.
The IRQ
0
to IRQ
5
interrupts have the following features.
∑
ISCR settings can select whether an interrupt is requested by the low level of the input at pins
IRQ
0
to
IRQ
5
, or by the falling edge.
∑
IER settings can enable or disable the IRQ
0
to IRQ
5
interrupts. Interrupt priority levels can be
assigned by four bits in IPRA (IPRA7 to IPRA4).
∑
The status of IRQ
0
to IRQ
5
interrupt requests is indicated in ISR. The ISR flags can be cleared
to 0 by software.
Figure 5-2 shows a block diagram of interrupts IRQ
0
to IRQ
5
.
input
Edge/level
sense circuit
IRQnSC
IRQnF
S
R
Q
IRQnE
IRQn interrupt
request
Clear signal
IRQn
Note: n = 5 to 0
Figure 5-2 Block Diagram of Interrupts IRQ
0
to IRQ
5
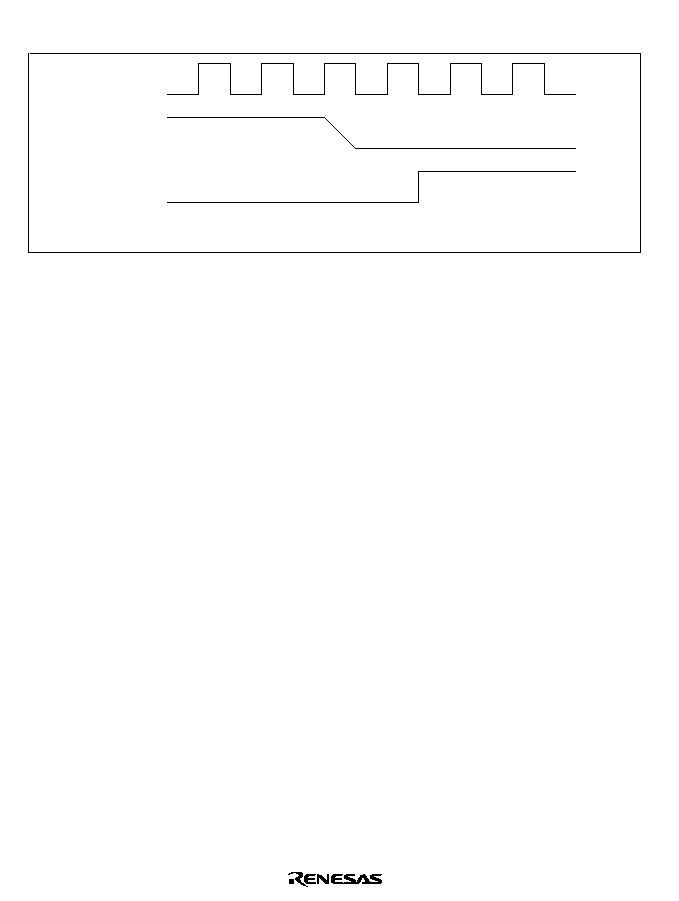
92
Figure 5-3 shows the timing of the setting of the interrupt flags (IRQnF).
IRQn
Note: n = 5 to 0
IRQnF
input pin
Figure 5-3 Timing of Setting of IRQnF
Interrupts IRQ
0
to IRQ
5
have vector numbers 12 to 17. These interrupts are detected regardless of
whether the corresponding pin is set for input or output. When using a pin for external interrupt
input, clear its DDR bit to 0 and do not use the pin for chip select output, refresh output, SCI
input/output, or A/D external trigger input.
5.3.2
Internal Interrupts
Thirty-Six internal interrupts are requested from the on-chip supporting modules.
∑
Each on-chip supporting module has status flags for indicating interrupt status, and enable bits
for enabling or disabling interrupts.
∑
Interrupt priority levels can be assigned in IPRA and IPRB.
∑
16-bit timer, SCI, and A/D converter interrupt requests can activate the DMAC, in which case
no interrupt request is sent to the interrupt controller, and the I and UI bits are disregarded.
5.3.3
Interrupt Vector Table
Table 5-3 lists the interrupt sources, their vector addresses, and their default priority order. In the
default priority order, smaller vector numbers have higher priority. The priority of interrupts other
than NMI can be changed in IPRA and IPRB. The priority order after a reset is the default order
shown in table 5-3.
93
Table 5-3
Interrupt Sources, Vector Addresses, and Priority
Vector Address*
Interrupt Source
Origin
Vector Number
Advanced Mode
IPR
Priority
NMI
External
7
H'001C to H'001F
--
High
IRQ
0
pins
12
H'0030 to H'0033
IPRA7
IRQ
1
13
H'0034 to H0037
IPRA6
IRQ
2
IRQ
3
14
15
H'0038 to H'003B
H'003C to H'003F
IPRA5
IRQ
4
IRQ
5
16
17
H'0040 to H'0043
H'0044 to H'0047
IPRA4
Reserved
--
18
19
H'0048 to H'004B
H'004C to H'004F
WOVI
(interval timer)
Watchdog
timer
20
H'0050 to H'0053
IPRA3
CMI
(compare match)
DRAM
interface
21
H'0054 to H'0057
Reserved
--
22
H'0058 to H'005B
ADI (A/D end)
A/D
23
H'005E to H'005F
IMIA0
(compare match/
input capture A0)
IMIB0
(compare match/
input capture B0)
OVI0 (overflow 0)
16-bit timer
channel 0
24
25
26
H'0060 to H'0063
H'0064 to H'0067
H'0068 to H'006B
IPRA2
Reserved
--
27
H'006C to H'006F
IMIA1
(compare match/
inputcapture A1)
IMIB1
(compare match/
input capture B1)
OVI1 (overflow 1)
16-bit timer
channel 1
28
29
30
H'0070 to H'0073
H'0074 to H'0077
H'0078 to H'007B
IPRA1
Reserved
--
31
H'007C to H'007F
Low

94
Vector Address*
Interrupt Source
Origin
Vector Number
Advanced Mode
IPR
Priority
IMIA2
(compare match/
input capture A2)
IMIB2
(compare match/
input capture B2)
OVI2 (overflow 2)
16-bit timer
channel 2
32
33
34
H'0080 to H'0083
H'0084 to H'0087
H'0088 to H'008B
IPRA0
High
Reserved
--
35
H'008C to H'008F
CMIA0
(compare match
A0)
CMIB0
(compare match
B0)
CMIA1/CMIB1
(compare match
A1/B1)
TOVI0/TOVI1
(overflow 0/1)
8-bit timer
channel 0/1
36
37
38
39
H'0090 to H'0093
H'0094 to H'0097
H'0098 to H'009B
H'009C to H'009F
IPRB7
CMIA2
(compare match
A2)
CMIB2
(compare match
B2)
CMIA3/CMIB3
(compare match
A3/B3)
TOVI2/TOVI3
(overflow 2/3)
8-bit timer
channel 2/3
40
41
42
43
H'00A0 to H'00A3
H'00A4 to H'00A7
H'00A8 to H'00AB
H'00AC to H'00AF
IPRB6
DEND0A
DEND0B
DEND1A
DEND1B
DMAC
44
45
46
47
H'00B0 to H'00B3
H'00B4 to H'00B7
H'00B8 to H'00BB
H'00BC to H'00BF
IPRB5
Reserved
--
48
49
50
51
H'00C0 to H'00C3
H'00C4 to H'00C7
H'00C8 to H'00CB
H'00CC to H'00CF
--
Low

95
Vector Address*
Interrupt Source
Origin
Vector Number
Advanced Mode
IPR
Priority
ERI0
(receive error 0)
RXI0 (receive
data full 0)
TXI0 (transmit
data empty 0)
TEI0
(transmit end 0)
SCI
channel 0
52
53
54
55
H'00D0 to H'00D3
H'00D4 to H'00D7
H'00D8 to H'00DB
H'00DC to H'00DF
IPRB3
High
ERI1
(receive error 1)
RXI1 (receive
data full 1)
TXI1 (transmit
data empty 1)
TEI1 (transmit
end 1)
SCI
channel 1
56
57
58
59
H'00E0 to H'00E3
H'00E4 to H'00E7
H'00E8 to H'00EB
H'00EC to H'00EF
IPRB2
ERI2
(receive error 2)
RXI2 (receive
data full 2)
TXI2 (transmit
data empty 2)
TEI2 (transmit
end 2)
SCI
channel 2
60
61
62
63
H'00F0 to H'00F3
H'00F4 to H'00F7
H'00F8 to H'00FB
H'00FC to H'00FF
IPRB1
Low
Note:
*
Lower 16 bits of the address.
96
5.4
Interrupt Operation
5.4.1
Interrupt Handling Process
The H8/3006 and H8/3007 handles interrupts differently depending on the setting of the UE bit.
When UE = 1, interrupts are controlled by the I bit. When UE = 0, interrupts are controlled by the
I and UI bits. Table 5-4 indicates how interrupts are handled for all setting combinations of the
UE, I, and UI bits.
NMI interrupts are always accepted except in the reset and hardware standby states. IRQ interrupts
and interrupts from the on-chip supporting modules have their own enable bits. Interrupt requests
are ignored when the enable bits are cleared to 0.
Table 5-4
UE, I, and UI Bit Settings and Interrupt Handling
SYSCR
CCR
UE
I
UI
Description
1
0
--
All interrupts are accepted. Interrupts with priority level 1 have higher
priority.
1
--
No interrupts are accepted except NMI.
0
0
--
All interrupts are accepted. Interrupts with priority level 1 have higher
priority.
1
0
NMI and interrupts with priority level 1 are accepted.
1
No interrupts are accepted except NMI.
UE = 1: Interrupts IRQ
0
to IRQ
5
and interrupts from the on-chip supporting modules can all be
masked by the I bit in the CPU's CCR. Interrupts are masked when the I bit is set to 1, and
unmasked when the I bit is cleared to 0. Interrupts with priority level 1 have higher priority. Figure
5-4 is a flowchart showing how interrupts are accepted when UE = 1.

97
Program execution state
Interrupt requested?
NMI
No
Yes
No
Yes
No
Priority level 1?
No
IRQ
0
Yes
No
IRQ
1
Yes
TEI2
Yes
No
IRQ
0
Yes
No
IRQ
1
Yes
TEI2
Yes
No
I = 0
Yes
Save PC and CCR
I 1
Branch to interrupt
service routine
Pending
Yes
Read vector address
Figure 5-4 Process Up to Interrupt Acceptance when UE = 1

98
∑
If an interrupt condition occurs and the corresponding interrupt enable bit is set to 1, an
interrupt request is sent to the interrupt controller.
∑
When the interrupt controller receives one or more interrupt requests, it selects the highest-
priority request, following the IPR interrupt priority settings, and holds other requests pending.
If two or more interrupts with the same IPR setting are requested simultaneously, the interrupt
controller follows the priority order shown in table 5-3.
∑
The interrupt controller checks the I bit. If the I bit is cleared to 0, the selected interrupt request
is accepted. If the I bit is set to 1, only NMI is accepted; other interrupt requests are held
pending.
∑
When an interrupt request is accepted, interrupt exception handling starts after execution of the
current instruction has been completed.
∑
In interrupt exception handling, PC and CCR are saved to the stack area. The PC value that is
saved indicates the address of the first instruction that will be executed after the return from the
interrupt service routine.
∑
Next the I bit is set to 1 in CCR, masking all interrupts except NMI.
∑
The vector address of the accepted interrupt is generated, and the interrupt service routine
starts executing from the address indicated by the contents of the vector address.
UE = 0: The I and UI bits in the CPU's CCR and the IPR bits enable three-level masking of
IRQ
0
to IRQ
5
interrupts and interrupts from the on-chip supporting modules.
∑
Interrupt requests with priority level 0 are masked when the I bit is set to 1, and are unmasked
when the I bit is cleared to 0.
∑
Interrupt requests with priority level 1 are masked when the I and UI bits are both set to 1, and
are unmasked when either the I bit or the UI bit is cleared to 0.
For example, if the interrupt enable bits of all interrupt requests are set to 1, IPRA is set to
H'20, and IPRB is set to H'00 (giving IRQ
2
and IRQ
3
interrupt requests priority over other
interrupts), interrupts are masked as follows:
a. If I = 0, all interrupts are unmasked (priority order: NMI > IRQ
2
> IRQ
3
>IRQ
0
...).
b. If I = 1 and UI = 0, only NMI, IRQ
2
, and IRQ
3
are unmasked.
c. If I = 1 and UI = 1, all interrupts are masked except NMI.
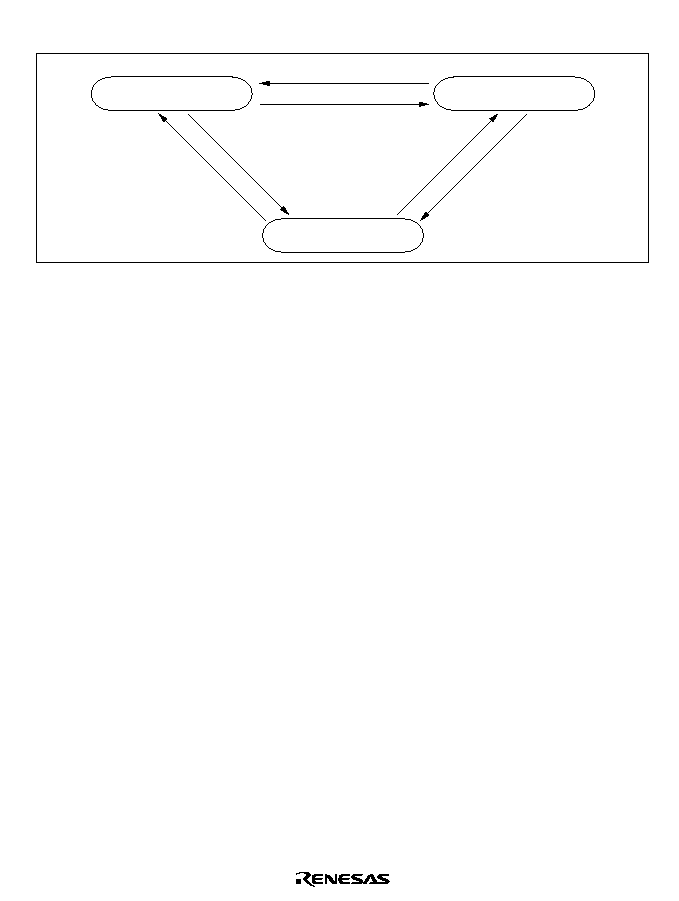
99
Figure 5-5 shows the transitions among the above states.
All interrupts are
unmasked
Only NMI, IRQ , and
IRQ are unmasked
Exception handling,
or I 1, UI 1
a.
b.
2
3
All interrupts are
masked except NMI
c.
UI 0
I 0
Exception handling,
or UI 1
I 0
I 1, UI 0
Figure 5-5 Interrupt Masking State Transitions (Example)
Figure 5-6 is a flowchart showing how interrupts are accepted when UE = 0.
∑
If an interrupt condition occurs and the corresponding interrupt enable bit is set to 1, an
interrupt request is sent to the interrupt controller.
∑
When the interrupt controller receives one or more interrupt requests, it selects the highest-
priority request, following the IPR interrupt priority settings, and holds other requests pending.
If two or more interrupts with the same IPR setting are requested simultaneously, the interrupt
controller follows the priority order shown in table 5-3.
∑
The interrupt controller checks the I bit. If the I bit is cleared to 0, the selected interrupt request
is accepted regardless of its IPR setting, and regardless of the UI bit. If the I bit is set to 1 and
the UI bit is cleared to 0, only NMI and interrupts with priority level 1 are accepted; interrupt
requests with priority level 0 are held pending. If the I bit and UI bit are both set to 1, interrupt
requests are held pending.
∑
When an interrupt request is accepted, interrupt exception handling starts after execution of the
current instruction has been completed.
∑
In interrupt exception handling, PC and CCR are saved to the stack area. The PC value that is
saved indicates the address of the first instruction that will be executed after the return from the
interrupt service routine.
∑
The I and UI bits are set to 1 in CCR, masking all interrupts except NMI.
∑
The vector address of the accepted interrupt is generated, and the interrupt service routine
starts executing from the address indicated by the contents of the vector address.
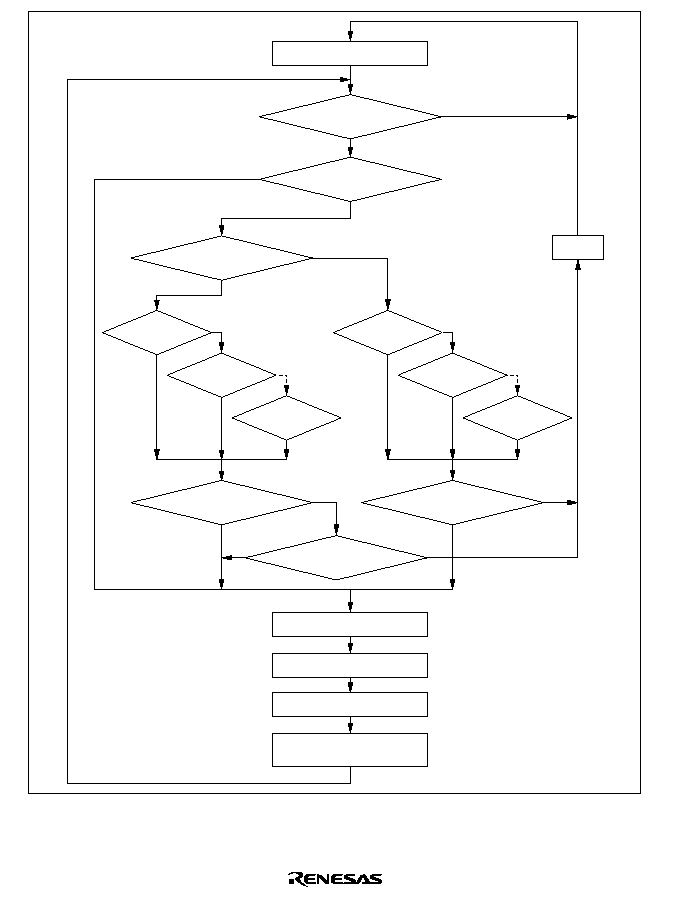
100
Program execution state
Interrupt requested?
NMI
No
Yes
No
Yes
No
Priority level 1?
No
IRQ
0
Yes
No
IRQ
1
Yes
TEI2
Yes
No
IRQ
0
Yes
No
IRQ
1
Yes
TEI2
Yes
No
I = 0
Yes
No
I = 0
Yes
UI = 0
Yes
No
Save PC and CCR
I 1, UI 1
Pending
Branch to interrupt
service routine
Yes
Read vector address
Figure 5-6 Process Up to Interrupt Acceptance when UE = 0
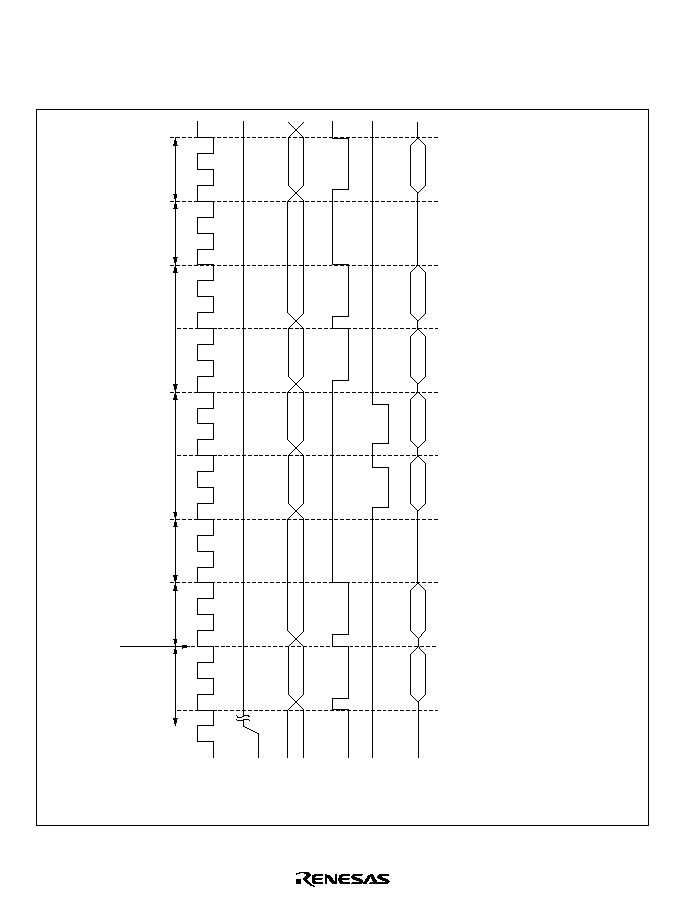
101
5.4.2
Interrupt Sequence
Figure 5-7 shows the interrupt sequence in mode 2 when the program code and stack are in an
external memory area accessed in two states via a 16-bit bus.
Address
bus
Interrupt
request
signal
RD
HWR
D to D
15
8
(1)
(2), (4)
(3)
(5)
(7)
Note: Mode 2, with program code and stack in external memory area accessed in two states via 16-bit bus.
LWR
,
Interrupt level
decision and wait
for end of instruction
Interrupt accepted
Instruction
prefetch
Internal
processing
Stack
V
ector fetch
Internal
processing
Prefetch of
interrupt
service routine
instruction
High
Instruction prefetch address (not executed;
return address, same as PC contents)
Instruction code (not executed)
Instruction prefetch address (not executed)
SP
≠
2
SP
≠
4
(6), (8)
(9), (1
1)
(10), (12)
(13)
(14)
PC and CCR saved to stack
V
ector address
Starting address of interrupt service routine (contents of
vector address)
Starting address of interrupt service routine; (13) = (10), (12)
First instruction of interrupt service routine
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(1
1)
(12)
(13)
(14)
Figure 5-7 Interrupt Sequence
102
5.4.3
Interrupt Response Time
Table 5-5 indicates the interrupt response time from the occurrence of an interrupt request until the
first instruction of the interrupt service routine is executed.
Table 5-5
Interrupt Response Time
External Memory
On-Chip
8-Bit Bus
16-Bit Bus
No.
Item
Memory
2 States
3 States
2 States
3 States
1
Interrupt priority
decision
2*
1
2*
1
2*
1
2*
1
2*
1
2
Maximum number
of states until end of
current instruction
1 to 23
1 to 27
1 to 31*
4
1 to 23
1 to 25*
4
3
Saving PC and CCR
to stack
4
8
12*
4
4
6*
4
4
Vector fetch
4
8
12*
4
4
6*
4
5
Instruction prefetch*
2
4
8
12*
4
4
6*
4
6
Internal processing*
3
4
4
4
4
4
Total
19 to 41
31 to 57
43 to 73
19 to 41
25 to 49
Notes: 1. 1 state for internal interrupts.
2. Prefetch after the interrupt is accepted and prefetch of the first instruction in the
interrupt service routine.
3. Internal processing after the interrupt is accepted and internal processing after vector
fetch.
4. The number of states increases if wait states are inserted in external memory access.
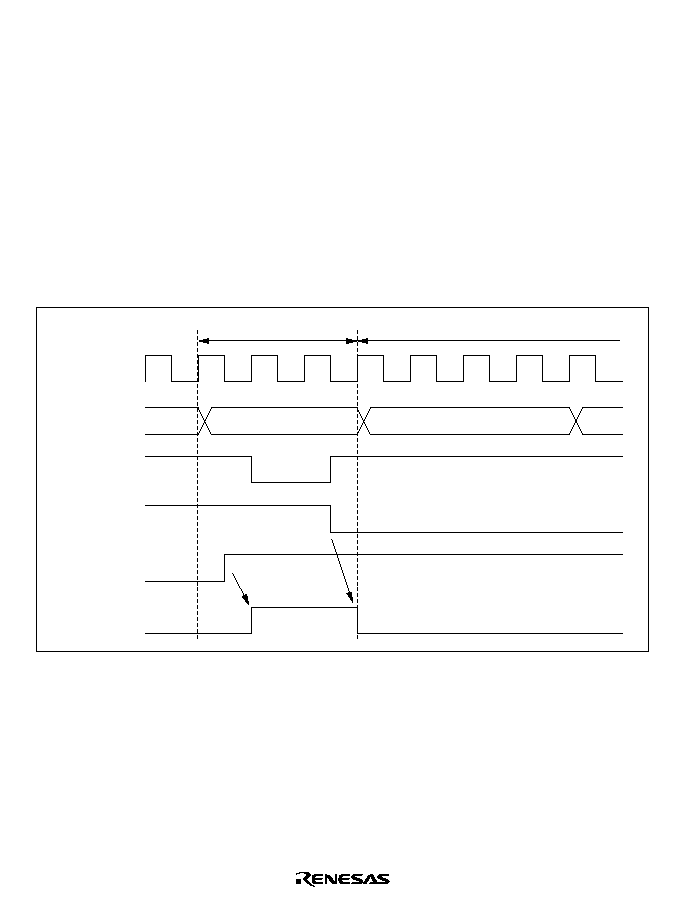
103
5.5
Usage Notes
5.5.1
Contention between Interrupt and Interrupt-Disabling Instruction
When an instruction clears an interrupt enable bit to 0 to disable the interrupt, the interrupt is not
disabled until after execution of the instruction is completed. If an interrupt occurs while a BCLR,
MOV, or other instruction is being executed to clear its interrupt enable bit to 0, at the instant
when execution of the instruction ends the interrupt is still enabled, so its interrupt exception
handling is carried out. If a higher-priority interrupt is also requested, however, interrupt exception
handling for the higher-priority interrupt is carried out, and the lower-priority interrupt is ignored.
This also applies to the clearing of an interrupt flag to 0.
Figure 5-8 shows an example in which an IMIEA bit is cleared to 0 in the 16-bit timer's TISRA
register.
IMIA exception handling
TISRA write cycle by CPU
TISRA address
Internal
address bus
Internal
write signal
IMIEA
IMIA
IMFA interrupt
signal
Figure 5-8 Contention between Interrupt and Interrupt-Disabling Instruction
This type of contention will not occur if the interrupt is masked when the interrupt enable bit or
flag is cleared to 0.

104
5.5.2
Instructions that Inhibit Interrupts
The LDC, ANDC, ORC, and XORC instructions inhibit interrupts. When an interrupt occurs, after
determining the interrupt priority, the interrupt controller requests a CPU interrupt. If the CPU is
currently executing one of these interrupt-inhibiting instructions, however, when the instruction is
completed the CPU always continues by executing the next instruction.
5.5.3
Interrupts during EEPMOV Instruction Execution
The EEPMOV.B and EEPMOV.W instructions differ in their reaction to interrupt requests.
When the EEPMOV.B instruction is executing a transfer, no interrupts are accepted until the
transfer is completed, not even NMI.
When the EEPMOV.W instruction is executing a transfer, interrupt requests other than NMI are
not accepted until the transfer is completed. If NMI is requested, NMI exception handling starts at
a transfer cycle boundary. The PC value saved on the stack is the address of the next instruction.
Programs should be coded as follows to allow for NMI interrupts during EEPMOV.W execution:
L1: EEPMOV.W
MOV.W R4,R4
BNE L1

105
Section 6 Bus Controller
6.1
Overview
The H8/3006 and H8/3007 have an on-chip bus controller (BSC) that manages the external
address space divided into eight areas. The bus specifications, such as bus width and number of
access states, can be set independently for each area, enabling multiple memories to be connected
easily.
The bus controller also has a bus arbitration function that controls the operation of the internal bus
masters-the CPU, DMA controller (DMAC), and DRAM interface and can release the bus to an
external device.
6.1.1
Features
The features of the bus controller are listed below.
∑
Manages external address space in area units
Manages the external space as eight areas (0 to 7) of 128 kbytes in 1M-byte modes, or 2
Mbytes in 16-Mbyte modes
Bus specifications can be set independently for each area
DRAM/burst ROM interfaces can be set
∑
Basic bus interface
Chip select (
CS
0
to
CS
7
) can be output for areas 0 to 7
8-bit access or 16-bit access can be selected for each area
Two-state access or three-state access can be selected for each area
Program wait states can be inserted for each area
Pin wait insertion capability is provided
∑
DRAM interface
DRAM interface can be set for areas 2 to 5
Row address/column address multiplexed output (8/9/10 bits)
2-CAS byte access mode
Burst operation (fast page mode)
T
P
cycle insertion to secure RAS precharging time
Choice of CAS-before-RAS refreshing or self-refreshing
∑
Burst ROM interface
Burst ROM interface can be set for area 0
Selection of two- or three-state burst access

106
∑
Idle cycle insertion
An idle cycle can be inserted in case of an external read cycle between different areas
An idle cycle can be inserted when an external read cycle is immediately followed by an
external write cycle
∑
Bus arbitration function
A built-in bus arbiter grants the bus right to the CPU, DMAC, DRAM interface, or an
external bus master
∑
Other features
The refresh counter (refresh timer) can be used as an interval timer

107
6.1.2
Block Diagram
Figure 6.1 shows a block diagram of the bus controller.
Internal address bus
ABWCR
ASTCR
BCR
CSCR
Area
decoder
Chip select
control signals
CS
0
to
CS
7
Bus control
circuit
WCRH
WCRL
BRCR
DRAM control
Legend
DRAM interface
Wait state
controller
WAIT
BACK
BREQ
Internal data bus
CPU bus request signal
DMAC bus request signal
DRAM interface bus request signal
CPU bus acknowledge signal
DMAC bus acknowledge signal
DRAM interface bus acknowledge signal
Bus arbiter
Bus mode control signal
Internal signals
Internal signals
Bus size control signal
Access state control signal
Wait request signal
: Bus width control register
: Access state control register
: DRAM control register A
: DRAM control register B
: Wait control register H
: Wait control register L
: Bus release control register
: Chip select control register
: Refresh timer control/status register
: Refresh timer counter
: Refresh time constant register
ASTCR
DRCRA
DRCRB
WCRH
WCRL
BRCR
CSCR
RTMCSR
RTCNT
RTCOR
ABWCR
DRCRA
DRCRB
RTMCSR
RTCNT
RTCOR
BCR
: Bus control register
Figure 6.1 Block Diagram of Bus Controller

108
6.1.3
Pin Configuration
Table 6.1 summarizes the input/output pins of the bus controller.
Table 6.1
Bus Controller Pins
Name
Abbreviation
I/O
Function
Chip select 0 to 7
CS
0
to
CS
7
Output
Strobe signals selecting areas 0 to 7
Address strobe
AS
Output
Strobe signal indicating valid address output
on the address bus
Read
RD
Output
Strobe signal indicating reading from the
external address space
High write
HWR
Output
Strobe signal indicating writing to the external
address space, with valid data on the upper
data bus (D
15
to D
8
)
Low write
LWR
Output
Strobe signal indicating writing to the external
address space, with valid data on the lower
data bus (D
7
to D
0
)
Wait
WAIT
Input
Wait request signal for access to external
three-state access areas
Bus request
BREQ
Input
Request signal for releasing the bus to an
external device
Bus acknowledge
BACK
Output
Acknowledge signal indicating release of the
bus to an external device
109
6.1.4
Register Configuration
Table 6.2 summarizes the bus controller's registers.
Table 6.2
Bus Controller Registers
Address*
1
Name
Abbreviation
R/W
Initial Value
H'EE020
Bus width control register
ABWCR
R/W
H'FF*
2
H'EE021
Access state control register
ASTCR
R/W
H'FF
H'EE022
Wait control register H
WCRH
R/W
H'FF
H'EE023
Wait control register L
WCRL
R/W
H'FF
H'EE013
Bus release control register
BRCR
R/W
H'FE*
3
H'EE01F
Chip select control register
CSCR
R/W
H'0F
H'EE024
Bus control register
BCR
R/W
H'C6
H'EE026
DRAM control register A
DRCRA
R/W
H'10
H'EE027
DRAM control register B
DRCRB
R/W
H'08
H'EE028
Refresh timer control/status register
RTMCSR
R(W)*
4
H'07
H'EE029
Refresh timer counter
RTCNT
R/W
H'00
H'EE02A
Refresh time constant register
RTCOR
R/W
H'FF
Notes: 1. Lower 20 bits of the address in advanced mode.
2. In modes 2 and 4, the initial value is H'00.
3. In modes 3 and 4, the initial value is H'EE.
4. For Bit 7, only 0 can be written to clear the flag.

110
6.2
Register Descriptions
6.2.1
Bus Width Control Register (ABWCR)
ABWCR is an 8-bit readable/writable register that selects 8-bit or 16-bit access for each area.
7
ABW7
1
R/W
0
R/W
6
ABW6
1
R/W
0
R/W
5
ABW5
1
R/W
0
R/W
4
ABW4
1
R/W
0
R/W
3
ABW3
1
R/W
0
R/W
2
ABW2
1
R/W
0
R/W
1
ABW1
1
R/W
0
R/W
0
ABW0
1
R/W
0
R/W
Bit
Modes
1 and 3
Initial value
Read/Write
Initial value
Read/Write
Modes
2 and 4
When ABWCR contains H'FF (selecting 8-bit access for all areas), the chip operates in 8-bit bus
mode: the upper data bus (D
15
to D
8
) is valid, and port 4 is an input/output port. When at least one
bit is cleared to 0 in ABWCR, the chip operates in 16-bit bus mode with a 16-bit data bus (D
15
to
D
0
). In modes 1 and 3, ABWCR is initialized to H'FF by a reset and in hardware standby mode.
In modes 2 and 4, ABWCR is initialized to H'00 by a reset and in hardware standby mode. It is
not initialized in software standby mode.
Bits 7 to 0--Area 7 to 0 Bus Width Control (ABW7 to ABW0): These bits select 8-bit access or
16-bit access for the corresponding areas.
Bits 7 to 0
ABW7 to ABW0
Description
0
Areas 7 to 0 are 16-bit access areas
1
Areas 7 to 0 are 8-bit access areas
ABWCR specifies the data bus width of external memory areas. The data bus width of on-chip
memory and registers is fixed, and does not depend on ABWCR settings.

111
6.2.2
Access State Control Register (ASTCR)
ASTCR is an 8-bit readable/writable register that selects whether each area is accessed in two
states or three states.
Bit
7
6
5
4
3
2
1
0
AST7
AST6
AST5
AST4
AST3
AST2
AST1
AST0
Initial value
1
1
1
1
1
1
1
1
Read/Write
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Bits selecting number of states for access to each area
ASTCR is initialized to H'FF by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bits 7 to 0--Area 7 to 0 Access State Control (AST7 to AST0): These bits select whether the
corresponding area is accessed in two or three states.
Bits 7 to 0
AST7 to AST0
Description
0
Areas 7 to 0 are accessed in two states
1
Areas 7 to 0 are accessed in three states
(Initial value)
ASTCR specifies the number of states in which external areas are accessed. On-chip memory and
registers are accessed in a fixed number of states that does not depend on ASTCR settings.
When the corresponding area is designated as DRAM space by bits DRAS2 to DRAS0 in DRAM
control register A (DRCRA), the number of access states does not depend on the AST bit setting.
When an AST bit is cleared to 0, programmable wait insertion is not performed.
6.2.3
Wait Control Registers H and L (WCRH, WCRL)
WCRH and WCRL are 8-bit readable/writable registers that select the number of program wait
states for each area.
On-chip memory and registers are accessed in a fixed number of states that does not depend on
WCRH/WCRL settings.
WCRH and WCRL are initialized to H'FF by a reset and in hardware standby mode. They are not
initialized in software standby mode.
112
WCRH
Bit
7
6
5
4
3
2
1
0
W71
W70
W61
W60
W51
W50
W41
W40
Initial value
1
1
1
1
1
1
1
1
Read/Write
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Bits 7 and 6--Area 7 Wait Control 1 and 0 (W71, W70): These bits select the number of
program wait states when area 7 in external space is accessed while the AST7 bit in ASTCR is set
to 1.
Bit 7
W71
Bit 6
W70
Description
0
0
Program wait not inserted when external space area 7 is accessed
1
1 program wait state inserted when external space area 7 is accessed
1
0
2 program wait states inserted when external space area 7 is accessed
1
3 program wait states inserted when external space area 7 is accessed
(Initial value)
Bits 5 and 4--Area 6 Wait Control 1 and 0 (W61, W60): These bits select the number of
program wait states when area 6 in external space is accessed while the AST6 bit in ASTCR is set
to 1.
Bit 5
W61
Bit 4
W60
Description
0
0
Program wait not inserted when external space area 6 is accessed
1
1 program wait state inserted when external space area 6 is accessed
1
0
2 program wait states inserted when external space area 6 is accessed
1
3 program wait states inserted when external space area 6 is accessed
(Initial value)
Bits 3 and 2--Area 5 Wait Control 1 and 0 (W51, W50): These bits select the number of
program wait states when area 5 in external space is accessed while the AST5 bit in ASTCR is set
to 1.
113
Bit 3
W51
Bit 2
W50
Description
0
0
Program wait not inserted when external space area 5 is accessed
1
1 program wait state inserted when external space area 5 is accessed
1
0
2 program wait states inserted when external space area 5 is accessed
1
3 program wait states inserted when external space area 5 is accessed
(Initial value)
Bits 1 and 0--Area 4 Wait Control 1 and 0 (W41, W40): These bits select the number of
program wait states when area 4 in external space is accessed while the AST4 bit in ASTCR is set
to 1.
Bit 1
W41
Bit 0
W40
Description
0
0
Program wait not inserted when external space area 4 is accessed
1
1 program wait state inserted when external space area 4 is accessed
1
0
2 program wait states inserted when external space area 4 is accessed
1
3 program wait states inserted when external space area 4 is accessed
(Initial value)
WCRL
Bit
7
6
5
4
3
2
1
0
W31
W30
W21
W20
W11
W10
W01
W00
Initial value
1
1
1
1
1
1
1
1
Read/Write
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Bits 7 and 6--Area 3 Wait Control 1 and 0 (W31, W30): These bits select the number of
program wait states when area 3 in external space is accessed while the AST3 bit in ASTCR is set
to 1.
Bit 7
W31
Bit 6
W30
Description
0
0
Program wait not inserted when external space area 3 is accessed
1
1 program wait state inserted when external space area 3 is accessed
1
0
2 program wait states inserted when external space area 3 is accessed
1
3 program wait states inserted when external space area 3 is accessed
(Initial value)
114
Bits 5 and 4--Area 2 Wait Control 1 and 0 (W21, W20): These bits select the number of
program wait states when area 2 in external space is accessed while the AST2 bit in ASTCR is set
to 1.
Bit 5
W21
Bit 4
W20
Description
0
0
Program wait not inserted when external space area 2 is accessed
1
1 program wait state inserted when external space area 2 is accessed
1
0
2 program wait states inserted when external space area 2 is accessed
1
3 program wait states inserted when external space area 2 is accessed
(Initial value)
Bits 3 and 2--Area 1 Wait Control 1 and 0 (W11, W10): These bits select the number of
program wait states when area 1 in external space is accessed while the AST1 bit in ASTCR is set
to 1.
Bit 3
W11
Bit 2
W10
Description
0
0
Program wait not inserted when external space area 1 is accessed
1
1 program wait state inserted when external space area 1 is accessed
1
0
2 program wait states inserted when external space area 1 is accessed
1
3 program wait states inserted when external space area 1 is accessed
(Initial value)
Bits 1 and 0--Area 0 Wait Control 1 and 0 (W01, W00): These bits select the number of
program wait states when area 0 in external space is accessed while the AST0 bit in ASTCR is set
to 1.
Bit 1
W01
Bit 0
W00
Description
0
0
Program wait not inserted when external space area 0 is accessed
1
1 program wait state inserted when external space area 0 is accessed
1
0
2 program wait states inserted when external space area 0 is accessed
1
3 program wait states inserted when external space area 0 is accessed
(Initial value)

115
6.2.4
Bus Release Control Register (BRCR)
BRCR is an 8-bit readable/writable register that enables address output on bus lines A
23
to A
20
and
enables or disables release of the bus to an external device.
7
A23E
1
--
1
R/W
Address 23 to 20 enable
These bits enable PA
7
to PA
4
to be
used for A
23
to A
20
address output
6
A22E
1
--
1
R/W
5
A21E
1
--
1
R/W
4
A20E
1
--
0
--
3
--
1
--
1
--
2
--
1
--
1
--
1
--
1
--
1
--
0
BRLE
0
R/W
0
R/W
Bit
Initial value
Read/Write
Initial value
Read/Write
Modes
3 and 4
Modes
1 and 2
Reserved bits
Bus release enable
Enables or disables
release of the bus to
an external device
BRCR is initialized to H'FE in modes 1 and 2, and to H'EE in modes 3 and 4, by a reset and in
hardware standby mode. It is not initialized in software standby mode.
Bit 7--Address 23 Enable (A23E): Enables PA
4
to be used as the A
23
address output pin.
Writing 0 in this bit enables A
23
output from PA
4
. In modes 1 and 2, this bit cannot be modified
and PA
4
has its ordinary port functions.
Bit 7
A23E
Description
0
PA
4
is the A
23
address output pin
1
PA
4
is an input/output pin
(Initial value)
Bit 6--Address 22 Enable (A22E): Enables PA
5
to be used as the A
22
address output pin.
Writing 0 in this bit enables A
22
output from PA
5
. In modes 1 and 2, this bit cannot be modified
and PA
5
has its ordinary port functions.
Bit 6
A22E
Description
0
PA
5
is the A
22
address output pin
1
PA
5
is an input/output pin
(Initial value)

116
Bit 5--Address 21 Enable (A21E): Enables PA
6
to be used as the A
21
address output pin.
Writing 0 in this bit enables A
21
output from PA
6
. In modes 1 and 2, this bit cannot be modified
and PA
6
has its ordinary port functions.
Bit 5
A21E
Description
0
PA
6
is the A
21
address output pin
1
PA
6
is an input/output pin
(Initial value)
Bit 4--Address 20 Enable (A20E): Initial value of this bit varies depending on the mode. This
bit can not be modified.
Bit 4
A20E
Description
0
PA
7
is the A
20
address output pin (Initial value in mode 3 or 4)
1
PA
7
is an input/output pin (Initial value in mode 1 or 2)
Bits 3 to 1--Reserved: These bits cannot be modified and are always read as 1.
Bit 0--Bus Release Enable (BRLE): Enables or disables release of the bus to an external device.
Bit 0
BRLE
Description
0
The bus cannot be released to an external device
BREQ
and
BACK
can be used as input/output pins
(Initial value)
1
The bus can be released to an external device
6.2.5
Bus Control Register (BCR)
Bit
7
6
5
4
3
2
1
0
ICIS1
ICIS0
BROME BRSTS1 BRSTS0
--
RDEA
WAITE
Initial value
1
1
0
0
0
1
1
0
Read/Write
R/W
R/W
R/W
R/W
R/W
--
R/W
R/W
BCR is an 8-bit readable/writable register that enables or disables idle cycle insertion, selects the
area division unit, and enables or disables
WAIT pin input.
BCR is initialized to H'C6 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
117
Bit 7--Idle Cycle Insertion 1 (ICIS1): Selects whether one idle cycle state is to be inserted
between bus cycles in case of consecutive external read cycles for different areas.
Bit 7
ICIS1
Description
0
No idle cycle inserted in case of consecutive external read cycles for different
areas
1
Idle cycle inserted in case of consecutive external read cycles for different
areas
(Initial value)
Bit 6--Idle Cycle Insertion 0 (ICIS0): Selects whether one idle cycle state is to be inserted
between bus cycles in case of consecutive external read and write cycles.
Bit 6
ICIS0
Description
0
No idle cycle inserted in case of consecutive external read and write cycles
1
Idle cycle inserted in case of consecutive external read and write cycles
(Initial value)
Bit 5--Burst ROM Enable (BROME): Selects whether area 0 is a burst ROM interface area.
Bit 5
BROME
Description
0
Area 0 is a basic bus interface area
(Initial value)
1
Area 0 is a burst ROM interface area
Bit 4--Burst Cycle Select 1 (BRSTS1): Selects the number of burst cycle states for the burst
ROM interface.
Bit 4
BRSTS1
Description
0
Burst access cycle comprises 2 states
(Initial value)
1
Burst access cycle comprises 3 states
Bit 3--Burst Cycle Select 0 (BRSTS0): Selects the number of words that can be accessed in a
burst ROM interface burst access.

118
Bit 3
BRSTS0
Description
0
Max. 4 words in burst access (burst access on match of address bits above A3)
(Initial value)
1
Max. 8 words in burst access (burst access on match of address bits above A4)
Bit 2--Reserved: Read-only bit, always read as 1.
Bit 1--Area Division Unit Select (RDEA): Selects the memory map area division units. This bit
is valid in modes 3 and 4, and is invalid in modes 1 and 2.
Bit 1
RDEA
Description
0
Area divisions are as follows:
Area 0: 2 Mbytes
Area 4: 1.93 Mbytes
Area 1: 2 Mbytes
Area 5: 4 kbytes
Area 2: 8 Mbytes
Area 6: 23.75 kbytes
Area 3: 2 Mbytes
Area 7: 22 bytes
1
Areas 0 to 7 are the same size (2 Mbytes)
(Initial value)
Bit 0--WAIT Pin Enable (WAITE): Enables or disables wait insertion by means of the
WAIT
pin.
Bit 0
WAITE
Description
0
WAIT
pin wait input is disabled, and the
WAIT
pin can be used as an
input/output port
(Initial value)
1
WAIT
pin wait input is enabled
6.2.6
Chip Select Control Register (CSCR)
CSCR is an 8-bit readable/writable register that enables or disables output of chip select signals
(
CS
7
to
CS
4
).
If output of a chip select signal is enabled by a setting in this register, the corresponding pin
functions a chip select signal (
CS
7
to
CS
4
) output regardless of any other settings.
119
Reserved bits
Chip select 7 to 4 enable
These bits enable or disable
chip select signal output
Bit
Initial value
Read/Write
7
CS7E
0
R/W
6
CS6E
0
R/W
5
CS5E
0
R/W
4
CS4E
0
R/W
3
--
1
--
2
--
1
--
1
--
1
--
0
--
1
--
CSCR is initialized to H'0F by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bits 7 to 4--Chip Select 7 to 4 Enable (CS7E to CS4E): These bits enable or disable output of
the corresponding chip select signal.
Bit n
CSnE
Description
0
Output of chip select signal CSn is disabled
(Initial value)
1
Output of chip select signal CSn is enabled
Note:
n = 7 to 4
Bits 3 to 0--Reserved: These bits cannot be modified and are always read as 1.
6.2.7
DRAM Control Register A (DRCRA)
Bit
7
6
5
4
3
2
1
0
DRAS2
DRAS1
DRAS0
--
BE
RDM
SRFMD
RFSHE
Initial value
0
0
0
1
0
0
0
0
Read/Write
R/W
R/W
R/W
--
R/W
R/W
R/W
R/W
DRCRA is an 8-bit readable/writable register that selects the areas that have a DRAM interface
function, and the access mode, and enables or disables self-refreshing and refresh pin output.
DRCRA is initialized to H'10 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bits 7 to 5--DRAM Area Select (DRAS2 to DRAS0): These bits select which of areas 2 to 5 are
to function as DRAM interface areas (DRAM space), and at the same time select the
RAS output
pin corresponding to each DRAM space.

120
Description
Bit 7
DRAS2
Bit 6
DRAS1
Bit 5
DRAS0 Area 5
Area 4
Area 3
Area 2
0
0
0
Normal
Normal
Normal
Normal
1
Normal
Normal
Normal
DRAM space
(
CS
2
)
1
0
Normal
Normal
DRAM space
(
CS
3
)
DRAM space
(
CS
2
)
1
Normal
Normal
DRAM space (
CS
2
)*
1
0
0
Normal
DRAM space
(
CS
4
)
DRAM space
(
CS
3
)
DRAM space
(
CS
2
)
1
DRAM space
(
CS
5
)
DRAM space
(
CS
4
)
DRAM space
(
CS
3
)
DRAM space
(
CS
2
)
1
0
DRAM space (
CS
4
)*
DRAM space (
CS
2
)*
1
DRAM space (
CS
2
)*
Note: * A single
CSn
pin serves as a common
RAS
output pin for a number of areas. Unused
CSn
pins can be used as input/output ports.
When any of bits DRAS2 to DRAS0 is set to 1, it is not possible to write to DRCRB, RTMCSR,
RTCNT, or RTCOR. However, 0 can be written to the CMF flag in RTMCSR to clear the flag.
When an arbitrary value has been set in DRAS2 to DRAS0, a write of a different value other than
000 must not be performed.
Bit 4--Reserved: This bit cannot be modified and is always read as 1.
Bit 3--Burst Access Enable (BE): Enables or disables burst access to DRAM space. DRAM
space burst access is performed in fast page mode.
Bit 3
BE
Description
0
Burst disabled (always full access)
(Initial value)
1
DRAM space access performed in fast page mode
Bit 2--RAS Down Mode (RDM): Selects whether to wait for the next DRAM access with the
RAS signal held low (RAS down mode), or to drive the RAS signal high again (RAS up mode),
when burst access is enabled for DRAM space (BE = 1), and access to DRAM is interrupted.
Caution is required when the
HWR and LWR are used as the UCAS and LCAS output pins. For
details, see RAS Down Mode and RAS Up Mode in section 6.5.10, Burst Operation.
121
Bit 2
RDM
Description
0
DRAM interface: RAS up mode selected
(Initial value)
1
DRAM interface: RAS down mode selected
Bit 1--Self-Refresh Mode (SRFMD): Specifies DRAM self-refreshing in software standby
mode.
When any of areas 2 to 5 is designated as DRAM space, DRAM self-refreshing is possible when a
transition is made to software standby mode after the SRFMD bit has been set to 1.
The normal access state is restored when software standby mode is exited, regardless of the
SRFMD setting.
Bit 1
SRFMD
Description
0
DRAM self-refreshing disabled in software standby mode
(Initial value)
1
DRAM self-refreshing enabled in software standby mode
Bit 0--Refresh Pin Enable (RFSHE): Enables or disables
RFSH pin refresh signal output. If
areas 2 to 5 are not designated as DRAM space, this bit should not be set to 1.
Bit 0
RFSHE
Description
0
RFSH
pin refresh signal output disabled
(Initial value)
(
RFSH
pin can be used as input/output port)
1
RFSH
pin refresh signal output enabled
6.2.8
DRAM Control Register B (DRCRB)
Bit
7
6
5
4
3
2
1
0
MXC1
MXC0
CSEL
RCYCE
--
TPC
RCW
RLW
Initial value
0
0
0
0
1
0
0
0
Read/Write
R/W
R/W
R/W
R/W
--
R/W
R/W
R/W
DRCRB is an 8-bit readable/writable register that selects the number of address multiplex column
address bits for the DRAM interface, the column address strobe output pin, enabling or disabling
of refresh cycle insertion, the number of precharge cycles, enabling or disabling of wait state
insertion between
RAS and CAS, and enabling or disabling of wait state insertion in refresh
cycles.

122
DRCRB is initialized to H'08 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
The settings in this register are invalid when bits DRAS2 to DRAS0 in DRCRA are all 0.
Bits 7 and 6--Multiplex Control 1 and 0 (MXC1, MXC0): These bits select the row
address/column address multiplexing method used on the DRAM interface. In burst operation, the
row address used for comparison is determined by the setting of these bits and the bus width of the
relevant area set in ABWCR.
Bit 7
MXC1
Bit 6
MXC0
Description
0
0
Column address: 8 bits
Compared address:
Modes 1, 2
8-bit access space
A
19
to A
8
16-bit access space
A
19
to A
9
Modes 3, 4
8-bit access space
A
23
to A
8
16-bit access space
A
23
to A
9
1
Column address: 9 bits
Compared address:
Modes 1, 2
8-bit access space
A
19
to A
9
16-bit access space
A
19
to A
10
Modes 3, 4
8-bit access space
A
23
to A
9
16-bit access space
A
23
to A
10
1
0
Column address: 10 bits
Compared address:
Modes 1, 2
8-bit access space
A
19
to A
10
16-bit access space
A
19
to A
11
Modes 3, 4
8-bit access space
A
23
to A
10
16-bit access space
A
23
to A
11
1
Illegal setting
Bit 5--
CAS Output Pin Select (CSEL): Selects the UCAS and LCAS output pins when areas 2
to 5 are designated as DRAM space.
Bit 5
CSEL
Description
0
PB4 and PB5 selected as
UCAS
and
LCAS
output pins
(Initial value)
1
HWR
and
LWR
selected as
UCAS
and
LCAS
output pins

123
Bit 4--Refresh Cycle Enable (RCYCE): CAS-before-RAS enables or disables refresh cycle
insertion. When none of areas 2 to 5 has been designated as DRAM space, refresh cycles are not
inserted regardless of the setting of this bit.
Bit 4
RCYCE
Description
0
Refresh cycles disabled
(Initial value)
1
DRAM refresh cycles enabled
Bit 3--Reserved: This bit cannot be modified and is always read as 1.
Bit 2--TP Cycle Control (TPC): Selects whether a 1-state or two-state precharge cycle (Tp) is to
be used for DRAM read/write cycles and CAS-before-RAS refresh cycles. The setting of this bit
does not affect the self-refresh function.
Bit 2
TPC
Description
0
1-state precharge cycle inserted
(Initial value)
1
2-state precharge cycle inserted
Bit 1--
RAS-CAS Wait (RCW): Controls wait state (Trw) insertion between T
r
and T
c1
in DRAM
read/write cycles. The setting of this bit does not affect refresh cycles.
Bit 1
RCW
Description
0
Wait state (Trw) insertion disabled
(Initial value)
1
One wait state (Trw) inserted
Bit 0--Refresh Cycle Wait Control (RLW): Controls wait state (T
RW
) insertion for CAS-before-
RAS refresh cycles. The setting of this bit does not affect DRAM read/write cycles.
Bit 0
RLW
Description
0
Wait state (T
RW
) insertion disabled
(Initial value)
1
One wait state (T
RW
) inserted

124
6.2.9
Refresh Timer Control/Status Register (RTMCSR)
Bit
7
6
5
4
3
2
1
0
CMF
CMIE
CKS2
CKS1
CKS0
--
--
--
Initial value
0
0
0
0
0
1
1
1
Read/Write
R(W)*
R/W
R/W
R/W
R/W
--
--
--
RTMCSR is an 8-bit readable/writable register that selects the refresh timer counter clock. When
the refresh timer is used as an interval timer, RTMCSR also enables or disables interrupt requests.
Bits 7 and 6 of RTMCSR are initialized to 0 by a reset and in the standby modes. Bits 5 to 3 are
initialized to 0 by a reset and in hardware standby mode; they are not initialized in software
standby mode.
Note:
Only 0 can be written to clear the flag.
Bit 7--Compare Match Flag (CMF): Status flag that indicates a match between the values of
RTCNT and RTCOR.
Bit 7
CMF
Description
0
[Clearing conditions]
∑
When the chip is reset and in standby mode
∑
Read CMF when CMF = 1, then write 0 in CMF
(Initial value)
1
[Setting condition]
When RTCNT = RTCOR
Bit 6--Compare Match Interrupt Enable (CMIE): Enables or disables the CMI interrupt
requested when the CMF flag is set to 1 in RTMCSR. The CMIE bit is always cleared to 0 when
any of areas 2 to 5 is designated as DRAM space.
Bit 6
CMIE
Description
0
The CMI interrupt requested by CMF is disabled
(Initial value)
1
The CMI interrupt requested by CMF is enabled
Bits 5 to 3--Refresh Counter Clock Select (CKS2 to CKS0): These bits select the clock to be
input to RTCNT from among 7 clocks obtained by dividing the system clock (
). When the input
clock is selected with bits CKS2 to CKS0, RTCNT begins counting up.
125
Bit 5
CKS2
Bit 4
CKS1
Bit 3
CKS0 Description
0
0
0
Count operation halted
(Initial value)
1
/2 used as counter clock
1
0
/8 used as counter clock
1
/32 used as counter clock
1
0
0
/128 used as counter clock
1
/512 used as counter clock
1
0
/2048 used as counter clock
1
/4096 used as counter clock
Bits 2 to 0--Reserved: These bits cannot be modified and are always read as 1.
6.2.10
Refresh Timer Counter (RTCNT)
Bit
7
6
5
4
3
2
1
0
Initial value
0
0
0
0
0
0
0
0
Read/Write
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
RTCNT is an 8-bit readable/writable up-counter.
RTCNT is incremented by an internal clock selected by bits CKS2 to CKS0 in RTMCSR. When
RTCNT matches RTCOR (compare match), the CMF flag in RTMCSR is set to 1 and RTCNT is
cleared to H'00. If the RCYCE bit in DRCRB is set to 1 at this time, a refresh cycle is started.
Also, if the CMIE bit in RTMCSR is set to 1, a compare match interrupt (CMI) is generated.
RTCNT is initialized to H'00 by a reset and in standby mode.

126
6.2.11
Refresh Time Constant Register (RTCOR)
Bit
7
6
5
4
3
2
1
0
Initial value
1
1
1
1
1
1
1
1
Read/Write
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
RTCOR is an 8-bit readable/writable register that sets the RTCNT compare-match interval.
RTCOR and RTCNT are constantly compared. When their values match, the CMF flag is set to 1
in RTMCSR, and RTCNT is simultaneously cleared to H'00.
RTCOR is initialized to H'FF by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Note:
Only byte access should be used with this register.
127
6.3
Operation
6.3.1
Area Division
The external address space is divided into areas 0 to 7. Each area has a size of 128 kbytes in the 1-
Mbyte modes, or 2-Mbytes in the 16-Mbyte modes. Figure 6.2 shows a general view of the
memory map.
H' 00000
H' 1FFFF
H' 20000
H' 3FFFF
H' 40000
H' 5FFFF
H' 60000
H' 7FFFF
H' 80000
H' 9FFFF
H' A0000
H' BFFFF
H' C0000
H' DFFFF
H' E0000
H' FFFFF
Area 0 (128 kbytes)
Area 1 (128 kbytes)
Area 2 (128 kbytes)
Area 3 (128 kbytes)
Area 4 (128 kbytes)
Area 5 (128 kbytes)
Area 6 (128 kbytes)
Area 7 (128 Mbytes)
H' 000000
H' 1FFFFF
H' 200000
H' 3FFFFF
H' 400000
H' 5FFFFF
H' 600000
H' 7FFFFF
H' 800000
H' 9FFFFF
H' A00000
H' BFFFFF
H' C00000
H' DFFFFF
H' E00000
H' FFFFFF
Area 0 (2 Mbytes)
Area 1 (2 Mbytes)
Area 2 (2 Mbytes)
Area 3 (2 Mbytes)
Area 4 (2 Mbytes)
Area 5 (2 Mbytes)
Area 6 (2 Mbytes)
Area 7 (2 Mbytes)
(a) 1-Mbyte modes (modes 1 and 2)
(b) 16-Mbyte modes (modes 3 and 4)
Figure 6.2 Access Area Map for Each Operating Mode
Chip select signals (
CS
0
to
CS
7
) can be output for areas 0 to 7. The bus specifications for each
area are selected in ABWCR, ASTCR, WCRH, and WCRL.
In 16-Mbyte mode, the area division units can be selected with the RDEA bit in BCR.
128
H'000000
H'1FFFFF
H'200000
H'3FFFFF
H'400000
H'5FFFFF
H'600000
H'7FFFFF
H'800000
H'9FFFFF
H'A00000
H'BFFFFF
H'C00000
H'DFFFFF
H'E00000
H'FEE000
H'FEE0FF
H'FEE100
H'FF7FFF
H'FF8000
H'FF8FFF
H'FF9000
H'FFEF1F
H'FFEF20
H'FFFEFF
H'FFFF00
H'FFFF1F
H'FFFF20
H'FFFFE9
H'FFFFEA
H'FFFFFF
Area 0
2 Mbytes
Area 1
2 Mbytes
Area 2
2 Mbytes
Area 3
2 Mbytes
Area 4
2 Mbytes
Area 5
2 Mbytes
Area 6
2 Mbytes
Area 7
1.93 Mbytes
On-chip registers (1)
Area 7
67.5 kbytes
On-chip RAM
4 kbytes
On-chip registers (2)
Area 7
22 bytes
Area 0
2 Mbytes
Area 1
2 Mbytes
Area 2
8 Mbytes
Area 3
2 Mbytes
Area 4
1.93 Mbytes
Area 5
4 kbytes
On-chip RAM
4 kbytes*
On-chip registers (2)
Area 7
22 bytes
Area 6
23.75 kbytes
On-chip registers (1)
2 Mbytes
2 Mbytes
2 Mbytes
2 Mbytes
2 Mbytes
2 Mbytes
2 Mbytes
2 Mbytes
Absolute
address 16 bits
Absolute
address 8 bits
(a) Memory map when RDEA = 1
Note: * Area 6 when the RAME bit is cleared.
(b) Memory map when RDEA = 0
Reserved 39.75 kbytes
Figure 6.3 Memory Map in 16-Mbyte Mode (H8/3007)

129
6.3.2
Bus Specifications
The external space bus specifications consist of three elements: (1) bus width, (2) number of
access states, and (3) number of program wait states.
The bus width and number of access states for on-chip memory and registers are fixed, and are not
affected by the bus controller.
Bus Width: A bus width of 8 or 16 bits can be selected with ABWCR. An area for which an 8-bit
bus is selected functions as an 8-bit access space, and an area for which a 16-bit bus is selected
functions as a16-bit access space.
If all areas are designated for 8-bit access, 8-bit bus mode is set; if any area is designated for 16-
bit access, 16-bit bus mode is set.
Number of Access States: Two or three access states can be selected with ASTCR. An area for
which two-state access is selected functions as a two-state access space, and an area for which
three-state access is selected functions as a three-state access space.
DRAM space is accessed in four states regardless of the ASTCR settings.
When two-state access space is designated, wait insertion is disabled.
Number of Program Wait States: When three-state access space is designated in ASTCR, the
number of program wait states to be inserted automatically is selected with WCRH and WCRL.
From 0 to 3 program wait states can be selected.
When ASTCR is cleared to 0 for DRAM space, a program wait (T
c1
-T
c2
wait) is not inserted.
Also, no program wait is inserted in burst ROM space burst cycles.
Table 6.3 shows the bus specifications for each basic bus interface area.
130
Table 6.3
Bus Specifications for Each Area (Basic Bus Interface)
ABWCR ASTCR WCRH/WCRL
Bus Specifications (Basic Bus Interface)
ABWn
ASTn
Wn1
Wn0
Bus Width
Access States
Program Wait States
0
0
--
--
16
2
0
1
0
0
3
0
1
1
1
0
2
1
3
1
0
--
--
8
2
0
1
0
0
3
0
1
1
1
0
2
1
3
6.3.3
Memory Interfaces
The H8/3006 and H8/3007 memory interfaces comprise a basic bus interface that allows direct
connection of ROM, SRAM, and so on; a DRAM interface that allows direct connection of
DRAM; and a burst ROM interface that allows direct connection of burst ROM. The interface can
be selected independently for each area.
An area for which the basic bus interface is designated functions as normal space, an area for
which the DRAM interface is designated functions as DRAM space, and area 0 for which the burst
ROM interface is designated functions as burst ROM space.
6.3.4
Chip Select Signals
For each of areas 0 to 7, the H8/3006 and H8/3007 can output a chip select signal (
CS
0
to
CS
7
) that
goes low when the corresponding area is selected. Figure 6.4 shows the output timing of a
CSn
signal.
Output of
CS
0
to
CS
3
: Output of
CS
0
to
CS
3
is enabled or disabled in the data direction register
(DDR) of the corresponding port.
A reset leaves pin
CS
0
in the output state and pins
CS
1
to
CS
3
in the input state. To output chip
select signals
CS
1
to
CS
3
, the corresponding DDR bits must be set to 1. For details, see section 8,
I/O Ports.
131
Output of
CS
4
to
CS
7
: Output of
CS
4
to
CS
7
is enabled or disabled in the chip select control
register (CSCR). A reset leaves pins
CS
4
to
CS
7
in the input state. To output chip select signals
CS
4
to
CS
7
, the corresponding CSCR bits must be set to 1. For details, see section 8, I/O Ports.
Address bus
External address in area n
CS
n
Figure 6.4
CSn Signal Output Timing (n = 0 to 7)
When the on-chip RAM and on-chip registers are accessed,
CS
0
to
CS
7
remain high. The
CS
n
signals are decoded from the address signals. They can be used as chip select signals for SRAM
and other devices.
132
6.4
Basic Bus Interface
6.4.1
Overview
The basic bus interface enables direct connection of ROM, SRAM, and so on.
The bus specifications can be selected with ABWCR, ASTCR, WCRH, and WCRL
(see table 6.3).
6.4.2
Data Size and Data Alignment
Data sizes for the CPU and other internal bus masters are byte, word, and longword. The bus
controller has a data alignment function, and when accessing external space, controls whether the
upper data bus (D
15
to D
8
) or lower data bus (D
7
to D
0
) is used according to the bus specifications
for the area being accessed (8-bit access area or 16-bit access area) and the data size.
8-Bit Access Areas: Figure 6.5 illustrates data alignment control for 8-bit access space. With 8-
bit access space, the upper data bus (D
15
to D
8
) is always used for accesses. The amount of data
that can be accessed at one time is one byte: a word access is performed as two byte accesses, and
a longword access, as four byte accesses.
D
15
D
8
D
7
D
0
Upper data bus
Lower data bus
1st bus cycle
2nd bus cycle
1st bus cycle
2nd bus cycle
3rd bus cycle
4th bus cycle
Byte size
Word size
Longword size
Figure 6.5 Access Sizes and Data Alignment Control (8-Bit Access Area)
16-Bit Access Areas: Figure 6.6 illustrates data alignment control for 16-bit access areas. With
16-bit access areas, the upper data bus (D
15
to D
8
) and lower data bus (D
7
to D
0
) are used for
accesses. The amount of data that can be accessed at one time is one byte or one word, and a
longword access is executed as two word accesses.

133
In byte access, whether the upper or lower data bus is used is determined by whether the address is
even or odd. The upper data bus is used for an even address, and the lower data bus for an odd
address.
D
15
D
8
D
7
D
0
Upper data bus
Lower data bus
1st bus cycle
2nd bus cycle
Byte size
Longword size
∑ Even address
∑ Odd address
Word size
Byte size
Figure 6.6 Access Sizes and Data Alignment Control (16-Bit Access Area)
6.4.3
Valid Strobes
Table 6.4 shows the data buses used, and the valid strobes, for the access spaces.
In a read, the
RD signal is valid for both the upper and the lower half of the data bus.
In a write, the
HWR signal is valid for the upper half of the data bus, and the LWR signal for the
lower half.

134
Table 6.4
Data Buses Used and Valid Strobes
Area
Access
Size
Read/Write
Address
Valid Strobe
Upper Data Bus
(D
15
to D
8
)
Lower Data Bus
(D
7
to D
0
)
8-bit
access
area
Byte
Read
--
RD
Valid
Invalid
Write
--
HWR
Undetermined
data
16-bit
access
area
Byte
Read
Even
RD
Valid
Invalid
Odd
Invalid
Valid
Write
Even
HWR
Valid
Undetermined
data
Odd
LWR
Undetermined
data
Valid
Word
Read
--
RD
Valid
Valid
Write
--
HWR
,
LWR
Valid
Valid
Notes: 1. Undetermined data means that unpredictable data is output.
2. Invalid means that the bus is in the input state and the input is ignored.
6.4.4
Memory Areas
The initial state of each area is basic bus interface, three-state access space. The initial bus width
is selected according to the operating mode. The bus specifications described here cover basic
items only, and the following sections should be referred to for further details: 6.4, Basic Bus
Interface, 6.5, DRAM Interface, 6.8, Burst ROM Interface.
Area 0: When area 0 external space is accessed, the
CS
0
signal can be output.
Either basic bus interface or burst ROM interface can be selected for area 0.
The size of area 0 is 128 kbytes in modes 1 and 2, and 2 Mbytes in modes 3 and 4.
Areas 1 and 6: When area 1 and 6 external space is accessed, the
CS
1
and
CS
6
pin signals
respectively can be output.
Only the basic bus interface can be used for areas 1 and 6.
The size of areas 1 and 6 is 128 kbytes in modes 1 and 2, and 2 Mbytes in modes 3 and 4.
Areas 2 to 5: When area 2 to 5 external space is accessed, signals
CS
2
to
CS
5
can be output.
Basic bus interface or DRAM interface can be selected for areas 2 to 5. With the DRAM
interface, signals
CS
2
to
CS
5
are used as
RAS signals.
The size of areas 2 to 5 is 128 kbytes in modes 1 and 2, and 2 Mbytes in modes 3 and 4.

135
Area 7: Area 7 includes the on-chip RAM and registers. The space excluding the on-chip RAM
and registers is external space. The on-chip RAM is enabled when the RAME bit in the system
control register (SYSCR) is set to 1; when the RAME bit is cleared to 0, the on-chip RAM is
disabled and the corresponding space becomes external space .
When area 7 external space is accessed, the
CS
7
signal can be output.
Only the basic bus interface can be used for the area 7 memory interface.
The size of area 7 is 128 kbytes in modes 1 and 2, and 2 Mbytes in modes 3 and 4.
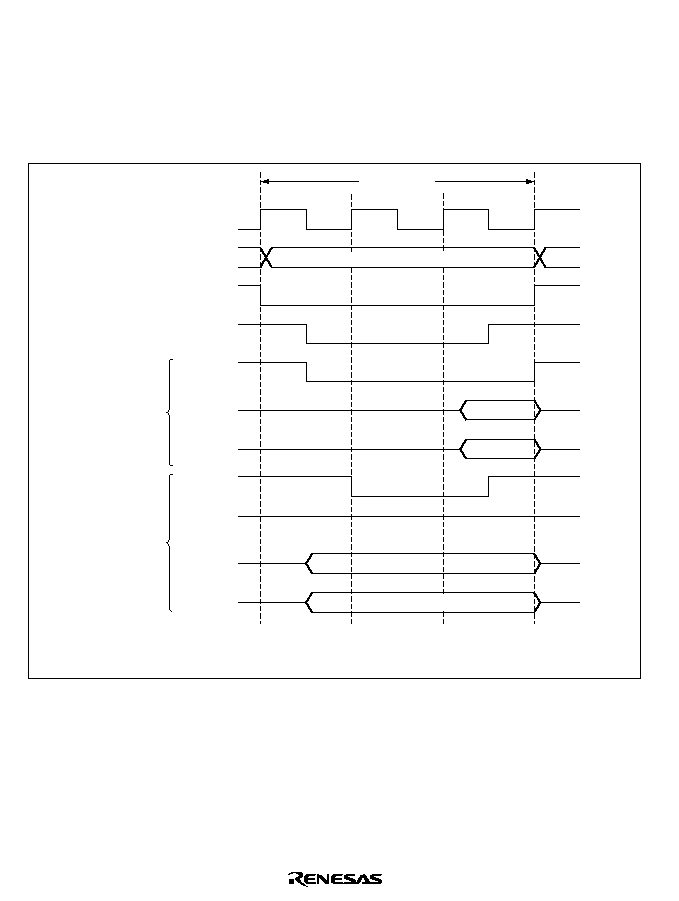
136
6.4.5
Basic Bus Control Signal Timing
8-Bit, Three-State-Access Areas
Figure 6.7 shows the timing of bus control signals for an 8-bit, three-state-access area. The upper
data bus (D
15
to D
8
) is used in accesses to these areas. The
LWR pin is always high. Wait states
can be inserted.
Bus cycle
External address in area n
Valid
Invalid
Valid
Undetermined data
High
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
T
3
Figure 6.7 Bus Control Signal Timing for 8-Bit, Three-State-Access Area
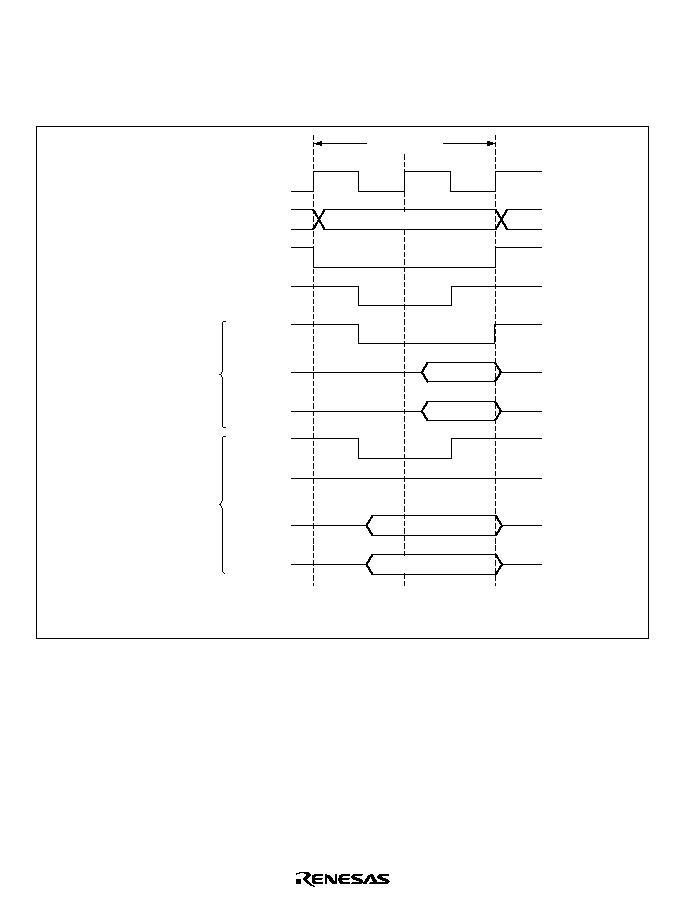
137
8-Bit, Two-State-Access Areas
Figure 6.8 shows the timing of bus control signals for an 8-bit, two-state-access area. The upper
data bus (D
15
to D
8
) is used in accesses to these areas. The
LWR pin is always high. Wait states
cannot be inserted.
Bus cycle
External address in area n
Valid
Invalid
Valid
Undetermined data
High
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
Figure 6.8 Bus Control Signal Timing for 8-Bit, Two-State-Access Area
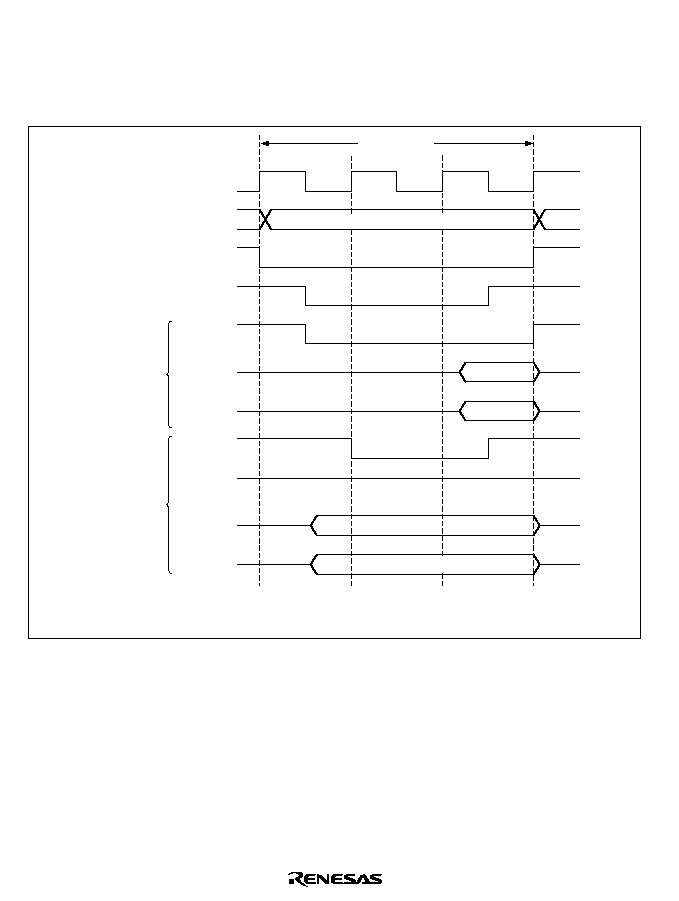
138
16-Bit, Three-State-Access Areas
Figures 6.9 to 6.11 show the timing of bus control signals for a 16-bit, three-state-access area. In
these areas, the upper data bus (D
15
to D
8
) is used in accesses to even addresses and the lower data
bus (D
7
to D
0
) in accesses to odd addresses. Wait states can be inserted.
Bus cycle
Even external address in area n
Valid
Invalid
Valid
High
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
T
3
Undetermined data
Figure 6.9 Bus Control Signal Timing for 16-Bit, Three-State-Access Area (1)
(Byte Access to Even Address)
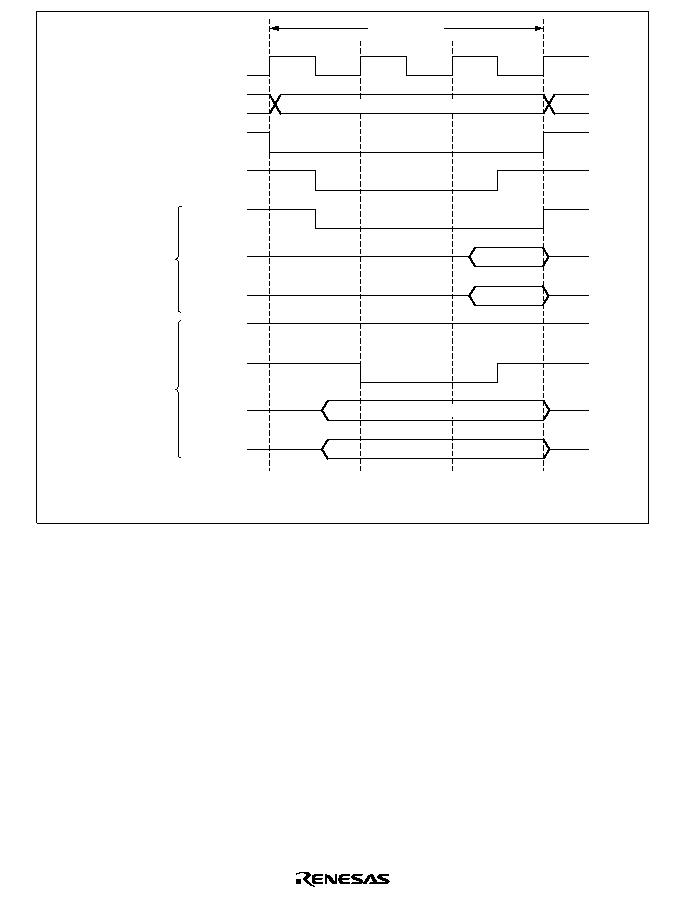
139
Bus cycle
Odd external address in area n
Valid
Invalid
Valid
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
T
3
High
Undetermined data
Figure 6.10 Bus Control Signal Timing for 16-Bit, Three-State-Access Area (2)
(Byte Access to Odd Address)

140
Bus cycle
External address in area n
Valid
Valid
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
T
3
Valid
Valid
Figure 6.11 Bus Control Signal Timing for 16-Bit, Three-State-Access Area (3)
(Word Access)
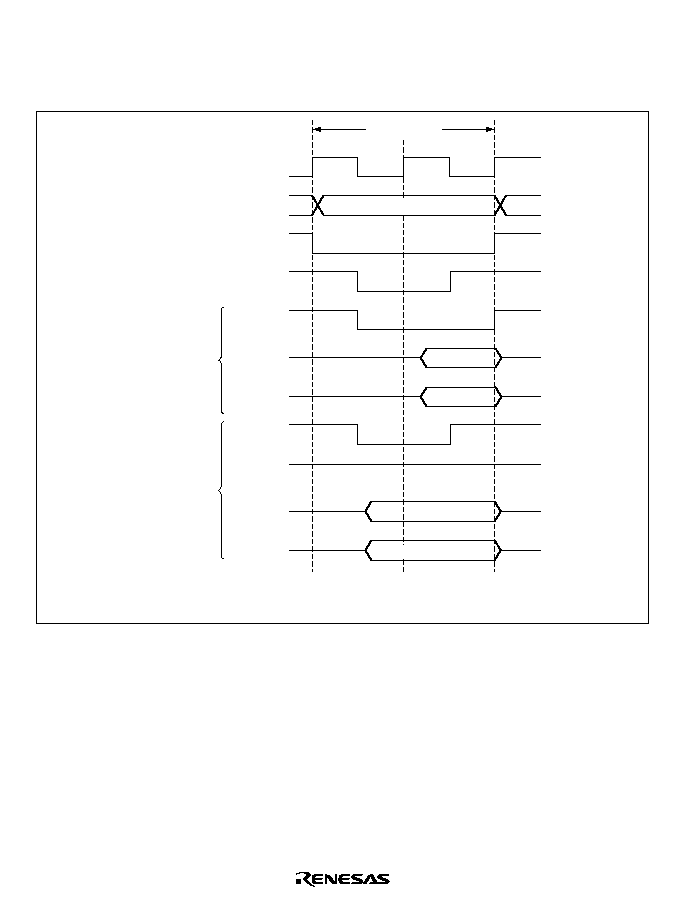
141
16-Bit, Two-State-Access Areas: Figures 6.12 to 6.14 show the timing of bus control signals for
a 16-bit, two-state-access area. In these areas, the upper data bus (D
15
to D
8
) is used in accesses to
even addresses and the lower data bus (D
7
to D
0
) in accesses to odd addresses. Wait states cannot
be inserted.
Bus cycle
Even external address in area n
Valid
Invalid
Valid
High
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
Undetermined data
Figure 6.12 Bus Control Signal Timing for 16-Bit, Two-State-Access Area (1)
(Byte Access to Even Address)
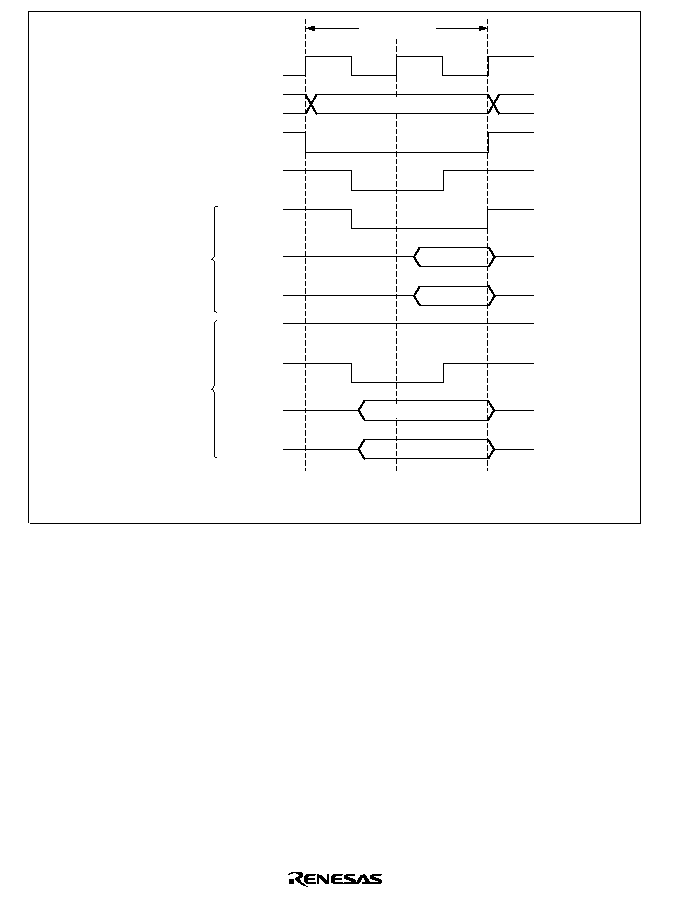
142
Bus cycle
Odd external address in area n
Valid
Invalid
Valid
High
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
Undetermined data
Figure 6.13 Bus Control Signal Timing for 16-Bit, Two-State-Access Area (2)
(Byte Access to Odd Address)

143
Bus cycle
External address in area n
Valid
Valid
Address bus
CS
n
AS
RD
D
15
to D
8
D
7
to D
0
HWR
LWR
D
15
to D
8
D
7
to D
0
Read access
Write access
Note: n = 7 to 0
T
1
T
2
Valid
Valid
Figure 6.14 Bus Control Signal Timing for 16-Bit, Two-State-Access Area (3)
(Word Access)
6.4.6
Wait Control
When accessing external space, the H8/3006 and H8/3007 can extend the bus cycle by inserting
one or more wait states (T
w
). There are two ways of inserting wait states: (1) program wait
insertion and (2) pin wait insertion using the
WAIT pin.
Program Wait Insertion: From 0 to 3 wait states can be inserted automatically between the T
2
state and T
3
state on an individual area basis in three-state access space, according to the settings
of WCRH and WCRL.
Pin Wait Insertion: Setting the WAITE bit in BCR to 1 enables wait insertion by means of the
WAIT pin. When external space is accessed in this state, a program wait is first inserted. If the
WAIT pin is low at the falling edge of
in the last T
2
or T
W
state, another T
W
state is inserted. If
the
WAIT pin is held low, T
W
states are inserted until it goes high.

144
This is useful when inserting four or more T
W
states, or when changing the number of T
W
states for
different external devices.
The WAITE bit setting applies to all areas. Pin waits cannot be inserted in DRAM space.
Figure 6.15 shows an example of the timing for insertion of one program wait state in 3-state
space.
WAIT
Address bus
Data bus
Read access
Write access
Data bus
AS
RD
T
1
T
2
T
w
T
w
T
w
T
3
HWR
,
LWR
Note: indicates the timing of
WAIT
pin sampling.
Inserted
by program wait Inserted by
WAIT
pin
Read data
Write data
Figure 6.15 Example of Wait State Insertion Timing
145
6.5
DRAM Interface
6.5.1
Overview
The H8/3006 and H8/3007 are provided with a DRAM interface with functions for DRAM control
signal (
RAS, UCAS, LCAS, WE) output, address multiplexing, and refreshing, that direct
connection of DRAM. In the expanded modes, external address space areas 2 to 5 can be
designated as DRAM space accessed via the DRAM interface. A data bus width of 8 or 16 bits
can be selected for DRAM space by means of a setting in ABWCR. When a 16-bit data bus width
is selected, CAS is used for byte access control. In the case of
◊
16-bit organization DRAM,
therefore, the 2-CAS type can be connected. A fast page mode is supported in addition to the
normal read and write access modes.
6.5.2
DRAM Space and
RAS Output Pin Settings
Designation of areas 2 to 5 as DRAM space, and selection of the
RAS output pin for each area
designated as DRAM space, is performed by setting bits DRAS2 to DRAS0 in DRCRA. Table
6.5 shows the correspondence between the settings of bits DRAS2 to DRAS0 and the selected
DRAM space and
RAS output pin.
When an arbitrary value has been set in DRAS2 to DRAS0, a write of a different value other than
000 must not be performed.
Table 6.5
Settings of Bits DRAS2 to DRAS0 and Corresponding DRAM Space (
RAS
Output Pin)
DRAS2 DRAS1 DRAS0 Area 5
Area 4
Area 3
Area 2
0
0
0
Normal space
Normal space
Normal space
Normal space
1
Normal space
Normal space
Normal space
DRAM space
(
CS
2
)
1
0
Normal space
Normal space
DRAM space
(
CS
3
)
DRAM space
(
CS
2
)
1
Normal space
Normal space
DRAM space (
CS
2
)*
1
0
0
Normal space
DRAM space
(
CS
4
)
DRAM space
(
CS
3
)
DRAM space
(
CS
2
)
1
DRAM space
(
CS
5
)
DRAM space
(
CS
4
)
DRAM space
(
CS
3
)
DRAM space
(
CS
2
)
1
0
DRAM space (
CS
4
)*
DRAM space (
CS
2
)*
1
DRAM space (
CS
2
)*
Note:
*
A single
CS
n
pin serves as a common
RAS
output pin for a number of areas. Unused
CS
n
pins can be used as input/output ports.

146
6.5.3
Address Multiplexing
When DRAM space is accessed, the row address and column address are multiplexed. The
address multiplexing method is selected with bits MXC1 and MXC0 in DRCRB according to the
number of bits in the DRAM column address. Table 6.6 shows the correspondence between the
settings of MXC1 and MXC0 and the address multiplexing method.
Table 6.6
Settings of Bits MXC1 and MXC0 and Address Multiplexing Method
DRCRB
Column
Address
Address Pins
MXC1 MXC0 Bits
A
23
to A
13
A
12
A
11
A
10
A
9
A
8
A
7
A
6
A
5
A
4
A
3
A
2
A
1
A
0
Row
address
0
0
8 bits
A
23
to A
13
A
20
* A
19
A
18
A
17
A
16
A
15
A
14
A
13
A
12
A
11
A
10
A
9
A
8
1
9 bits
A
23
to A
13
A
12
A
20
* A
19
A
18
A
17
A
16
A
15
A
14
A
13
A
12
A
11
A
10
A
9
1
0
10 bits
A
23
to A
13
A
12
A
11
A
20
* A
19
A
18
A
17
A
16
A
15
A
14
A
13
A
12
A
11
A
10
1
Illegal
setting
--
--
--
--
--
--
--
--
--
--
--
--
--
--
Column
address
--
--
--
A
23
to A
13
A
12
A
11
A
10
A
9
A
8
A
7
A
6
A
5
A
4
A
3
A
2
A
1
A
0
Note:
* Row address bit A
20
is not multiplexed in 1-Mbyte mode.
6.5.4
Data Bus
If the bit in ABWCR corresponding to an area designated as DRAM space is set to 1, that area is
designated as 8-bit DRAM space; if the bit is cleared to 0, the area is designated as 16-bit DRAM
space. In 16-bit DRAM space,
◊
16-bit organization DRAM can be connected directly.
In 8-bit DRAM space the upper half of the data bus, D
15
to D
8
, is enabled, while in 16-bit DRAM
space both the upper and lower halves of the data bus, D
15
to D
0
, are enabled.
Access sizes and data alignment are the same as for the basic bus interface: see section 6.4.2, Data
Size and Data Alignment.
6.5.5
Pins Used for DRAM Interface
Table 6.7 shows the pins used for DRAM interfacing and their functions.
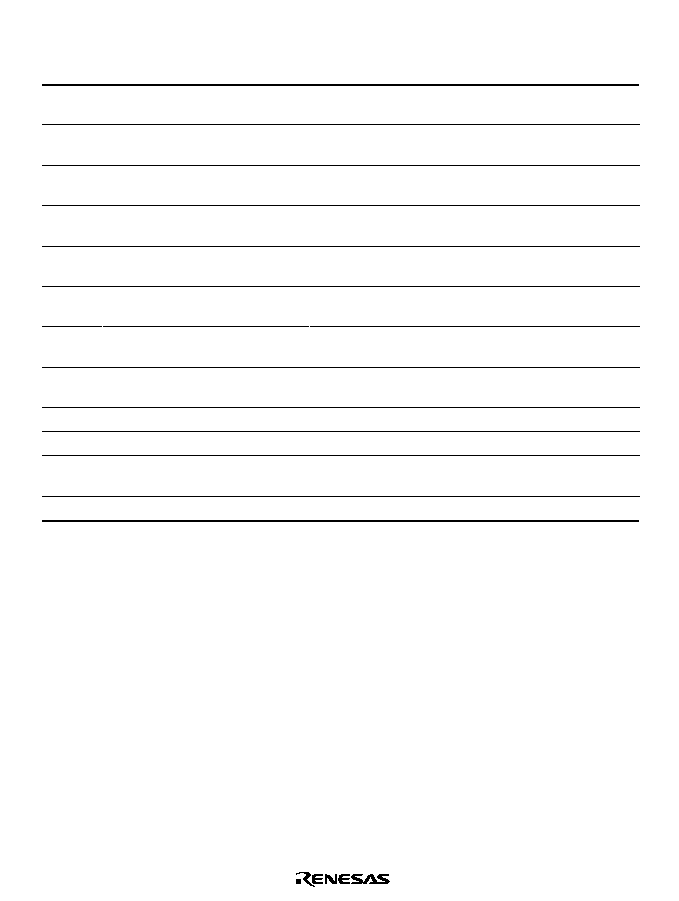
147
Table 6.7
DRAM Interface Pins
Pin
With DRAM
Designated Name
I/O
Function
PB4
UCAS
Upper column
address strobe
Output
Upper column address strobe for DRAM
space access (when CSEL = 0 in DRCRB)
PB5
LCAS
Lower column
address strobe
Output
Lower column address strobe for DRAM
space access (when CSEL = 0 in DRCRB)
HWR
UCAS
Upper column
address strobe
Output
Upper column address strobe for DRAM
space access (when CSEL = 1 in DRCRB)
LWR
LCAS
Lower column
address strobe
Output
Lower column address strobe for DRAM
space access (when CSEL = 1 in DRCRB)
CS
2
RAS
2
Row address
strobe 2
Output
Row address strobe for DRAM space
access
CS
3
RAS
3
Row address
strobe 3
Output
Row address strobe for DRAM space
access
CS
4
RAS
4
Row address
strobe 4
Output
Row address strobe for DRAM space
access
CS
5
RAS
5
Row address
strobe 5
Output
Row address strobe for DRAM space
access
RD
WE
Write enable
Output
Write enable for DRAM space write access*
P80
RFSH
Refresh
Output
Goes low in refresh cycle
A
12
to A
0
A
12
to A
0
Address
Output
Row address/column address multiplexed
output
D
15
to D
0
D
15
to D
0
Data
I/O
Data input/output pins
Note: * Fixed high in a read access.
6.5.6
Basic Timing
Figure 6.16 shows the basic access timing for DRAM space. The basic DRAM access timing is
four states: one precharge cycle (T
p
) state, one row address output cycle (T
r
) state, and two column
address output cycle (T
c1
, T
c2
) states. Unlike the basic bus interface, the corresponding bits in
ASTCR control only enabling or disabling of wait insertion between T
c1
and T
c2
, and do not affect
the number of access states. When the corresponding bit in ASTCR is cleared to 0, wait states
cannot be inserted between T
c1
and T
c2
in the DRAM access cycle.
If a DRAM read/write cycle is followed by an access cycle for an external area other than DRAM
space when
HWR and LWR are selected as the UCAS and LCAS output pins, an idle cycle (Ti) is
inserted unconditionally immediately after the DRAM access cycle. See section 6.9, Idle Cycle,
for details.
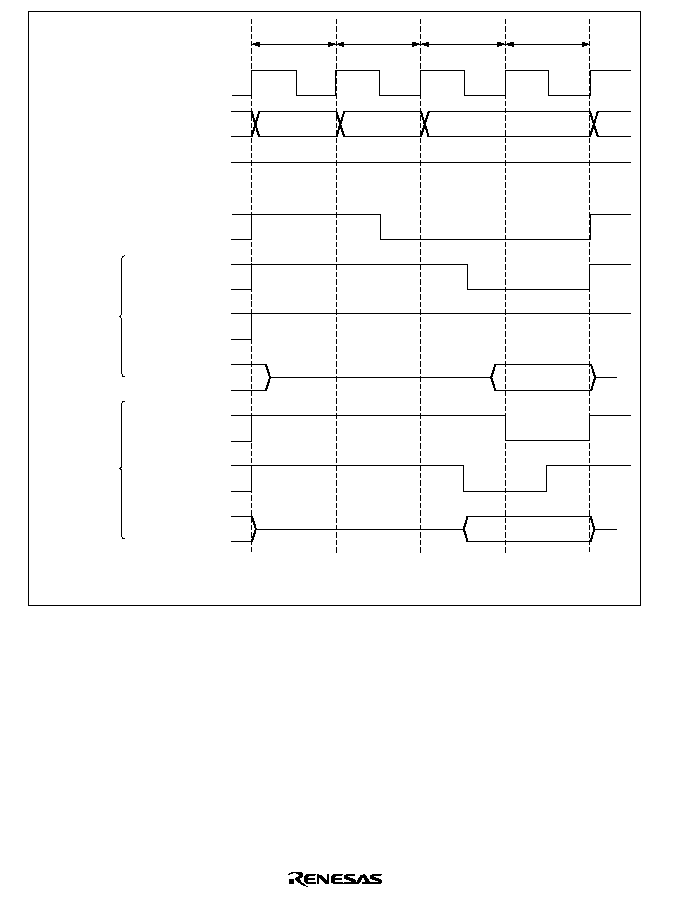
148
A
23
to A
0
CSn
(
RAS
)
T
p
Tr
T
c1
T
c2
(
UCAS
/
LCAS
)
PB4 /PB5
AS
RD
(
WE
)
D
15
to D
0
RD
(
WE
)
D
15
to D
0
(
UCAS
/
LCAS
)
PB4 /PB5
Row
High
High
Column
Read access
Write access
Note: n = 2 to 5
Figure 6.16 Basic Access Timing (CSEL = 0 in DRCRB)
6.5.7
Precharge State Control
In the H8/3006 and H8/3007, provision is made for the DRAM RAS precharge time by always
inserting one RAS precharge state (T
p
) when DRAM space is accessed. This can be changed to
two T
p
states by setting the TPC bit to 1 in DRCRB. The optimum number of T
p
cycles should be
set according to the DRAM connected and the operating frequency of the H8/3006 and H8/3007
chip. Figure 6.17 shows the timing when two T
p
states are inserted.
When the TCP bit is set to 1, two T
p
states are also used for CAS-before-RAS refresh cycles.
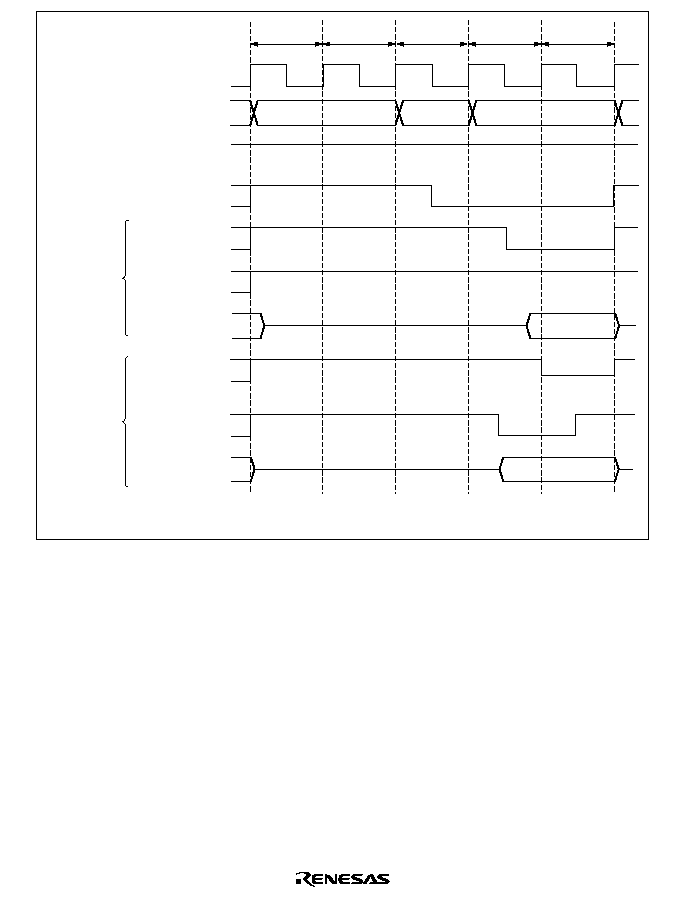
149
A
23
to A
0
CSn
(
RAS
)
AS
T
p1
Tr
T
c1
(
UCAS
/
LCAS
)
PB4 /PB5
RD
(
WE
)
D
15
to D
0
RD
(
WE
)
D
15 to
D
0
(
UCAS
/
LCAS
)
PB4 /PB5
T
c2
T
p2
Note: n = 2 to 5
Row
High
High
Column
Read access
Write access
Figure 6.17 Timing with Two Precharge States (CSEL = 0 in DRCRB)
6.5.8
Wait Control
In a DRAM access cycle, wait states can be inserted (1) between the T
r
state and T
c1
state, and (2)
between the T
c1
state and T
c2
state.
Insertion of T
rw
Wait State between T
r
and T
c1
: One T
rw
state can be inserted between T
r
and
T
c1
by setting the RCW bit to 1 in DRCRB.
Insertion of T
w
Wait State(s) between T
c1
and T
c2
: When the bit in ASTCR corresponding to an
area designated as DRAM space is set to 1, from 0 to 3 T
w
states can be inserted between the T
c1
state and T
c2
state by means of settings in WCRH and WCRL.
Figure 6.18 shows an example of the timing for wait state insertion.
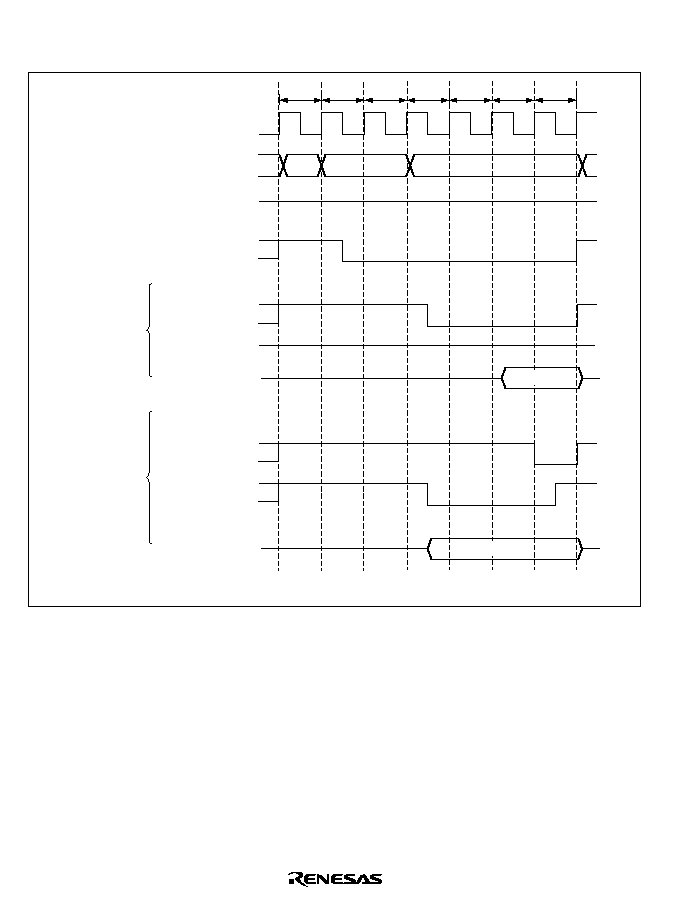
150
The settings of the RCW bit in DRCRB and of ASTCR, WCRH, and WCRL do not affect refresh
cycles. Wait states cannot be inserted in a DRAM space access cycle by means of the
WAIT pin.
T
p
Tr
T
c1
T
c2
(
UCAS
/
LCAS
)
PB4 /PB5
RD
(
WE
)
CSn
(
RAS
)
AS
D
15
to D
0
RD
(
WE
)
D
15
to D
0
(
UCAS
/
LCAS
)
PB4 /PB5
A
23
to A
0
Trw
Tw
Tw
Write access
Read access
Read data
Write data
Note: n = 2 to 5
Row
Column
High
High
Figure 6.18 Example of Wait State Insertion Timing (CSEL = 0)
6.5.9
Byte Access Control and
CAS Output Pin
When an access is made to DRAM space designated as a 16-bit-access area in ABWCR, column
address strobes (
UCAS and LCAS) corresponding to the upper and lower halves of the external
data bus are output. In the case of
◊
16-bit organization DRAM, the 2-CAS type can be
connected.
Either PB4 and PB5, or
HWR and LWR, can be used as the UCAS and LCAS output pins, the
selection being made with the CSEL bit in DRCRB. Table 6.8 shows the CSEL bit settings and
corresponding output pin selections.
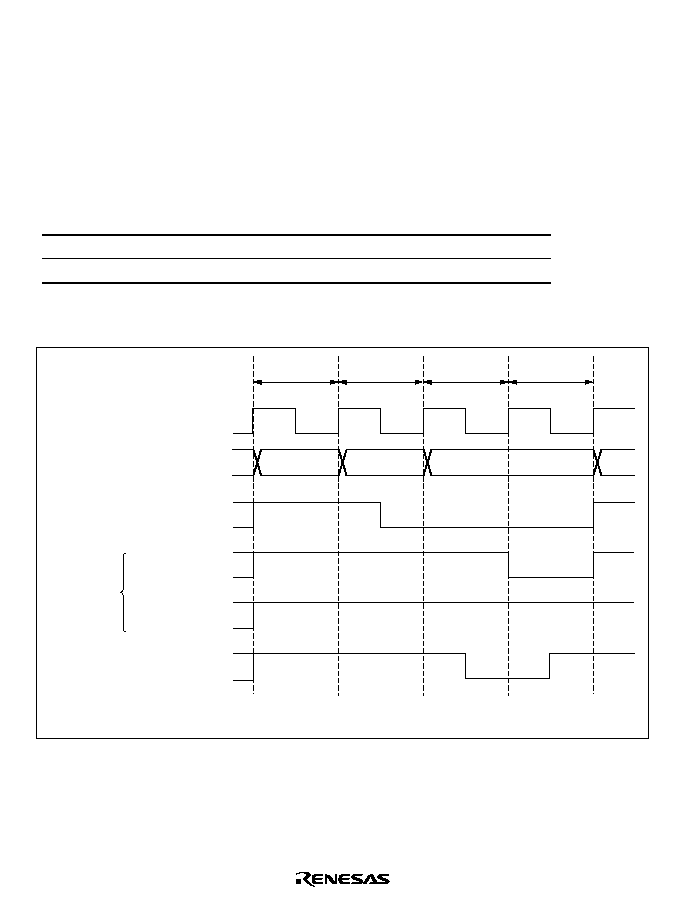
151
When an access is made to DRAM space designated as an 8-bit-access area in ABWCR, only
UCAS is output. When the entire DRAM space is designated as 8-bit-access space and CSEL = 0,
PB5 can be used as an input/output port.
Note that
RAS down mode cannot be used when a device other than DRAM is connected to
external space and
HWR and LWR are used as write strobes. In this case, also, an idle cycle (Ti) is
always inserted when an external access to other than DRAM space occurs after a DRAM space
access. For details, see section 6.9, Idle Cycle.
Table 6.8
CSEL Settings and
UCAS and LCAS Output Pins
CSEL
UCAS
LCAS
0
PB4
PB5
1
HWR
LWR
Figure 6.19 shows the control timing.
A
23
to A
0
CSn
(
RAS
)
T
p
Tr
T
c1
T
c2
PB4(
UCAS
)
PB5(
LCAS
)
RD
(
WE
)
Note: n = 2 to 5
Byte control
Row
Column
Figure 6.19 Control Timing (Upper-Byte Write Access When CSEL = 0)
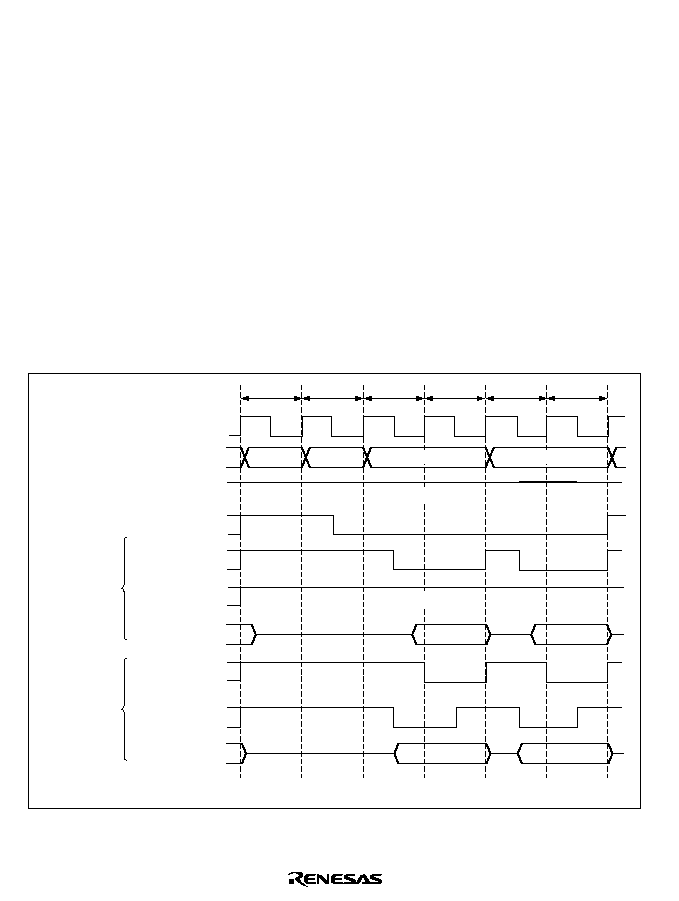
152
6.5.10 Burst
Operation
With DRAM, in addition to full access (normal access) in which data is accessed by outputting a
row address for each access, a fast page mode is also provided which can be used when making a
number of consecutive accesses to the same row address. This mode enables fast (burst) access of
data by simply changing the column address after the row address has been output. Burst access
can be selected by setting the BE bit to 1 in DRCRA.
Burst Access (Fast Page Mode) Operation Timing: Figure 6.20 shows the operation timing for
burst access. When there are consecutive access cycles for DRAM space, the column address and
CAS signal output cycles (two states) continue as long as the row address is the same for
consecutive access cycles. In burst access, too, the bus cycle can be extended by inserting wait
states between T
c1
and T
c2
. The wait state insertion method and timing are the same as for full
access: see section 6.5.8, Wait Control, for details.
The row address used for the comparison is determined by the bus width of the relevant area set in
bits MXC1 and MXC0 in BRCRB, and in ABWCR. Table 6.9 shows the compared row addresses
corresponding to the various settings of bits MXC1 and MXC0, and ABWCR.
A
23
to A
0
CS
n(
RAS
)
AS
T
p
Tr
T
c2
(
UCAS
/
LCAS
)
PB4 /PB5
RD
(
WE
)
D
15
to D
0
(
UCAS
/
LCAS
)
PB4 /PB5
T
c2
T
c1
T
c1
D
15
to D
0
RD
(
WE
)
Note: n = 2 to 5
Read access
Write access
Row
Column 1
Column 2
High
High
Figure 6.20 Operation Timing in Fast Page Mode

153
Table 6.9
Correspondence between Settings of MXC1 and MXC0 Bits and ABWCR, and
Row Address Compared in Burst Access
DRCRB
ABWCR
Operating Mode
MXC1
MXC0
ABWn
Bus Width
Compared Row Address
Modes 1 and 2
0
0
0
16 bits
A19 to A9
(1-Mbyte)
1
8 bits
A19 to A8
1
0
16 bits
A19 to A10
1
8 bits
A19 to A9
1
0
0
16 bits
A19 to A11
1
8 bits
A19 to A10
1
--
--
Illegal setting
Modes 3 and 4
0
0
0
16 bits
A23 to A9
(16-Mbyte)
1
8 bits
A23 to A8
1
0
16 bits
A23 to A10
1
8 bits
A23 to A9
1
0
0
16 bits
A23 to A11
1
8 bits
A23 to A10
1
--
--
Illegal setting
Note:
n = 2 to 5
RAS Down Mode and RAS Up Mode: With DRAM provided with fast page mode, as long as
accesses are to the same row address, burst operation can be continued without interruption even if
accesses are not consecutive by holding the
RAS signal low.
∑
RAS Down Mode
To select RAS down mode, set the BE and RDM bits to 1 in DRCRA. If access to DRAM
space is interrupted and another space is accessed, the
RAS signal is held low during the access
to the other space, and burst access is performed if the row address of the next DRAM space
access is the same as the row address of the previous DRAM space access. Figure 6.21 shows
an example of the timing in RAS down mode.

154
A
23
to A
0
CSn
(
RAS
)
T
p
Tr
T
c2
(
UCAS
/
LCAS
)
PB4/PB5
D
15
to D
0
T
2
T
c1
T
1
T
c2
T
c1
AS
Note: n = 2 to 5
DRAM access
DRAM access
External space
access
Figure 6.21 Example of Operation Timing in RAS Down Mode (CSEL = 0)
When RAS down mode is selected, the conditions for an asserted
RASn signal to return to the
high level are as shown below. The timing in these cases is shown in figure 6.22.
When DRAM space with a different row address is accessed
Immediately before a CAS-before-RAS refresh cycle
When the BE bit or RDM bit is cleared to 0 in DRCRA
Immediately before release of the external bus

155
RAS
n
RAS
n
RAS
n
RAS
n
Note: n = 2 to 5
DRAM access cycle
CBR refresh cycle
DRCRA write cycle
External bus released
High-impedance
(a) Access to DRAM space with a different row address
(b) CAS-before-RAS refresh cycle
(c) BE bit or RDM bit cleared to 0 in DRCRA
(d) External bus released
Figure 6.22
RASn Negation Timing when RAS Down Mode is Selected

156
When RAS down mode is selected, the CAS-before-RAS refresh function provided with this
DRAM interface must always be used as the DRAM refreshing method. When a refresh
operation is performed, the
RAS signal goes high immediately beforehand. The refresh
interval setting must be made so that the maximum DRAM
RAS pulse width specification is
observed.
When the self-refresh function is used, the RDM bit must be cleared to 0, and RAS up mode
selected, before executing a SLEEP instruction in order to enter software standby mode.
Select RAS down mode again after exiting software standby mode.
Note that RAS down mode cannot be used when
HWR and LWR are selected for UCAS and
LCAS, a device other than DRAM is connected to external space, and HWR and LWR are
used as write strobes.
∑
RAS Up Mode
To select RAS up mode, clear the RDM bit to 0 in DRCRA. Each time access to DRAM space
is interrupted and another space is accessed, the
RAS signal returns to the high level. Burst
operation is only performed if DRAM space is continuous. Figure 6.23 shows an example of
the timing in RAS up mode.
A
23
to A
0
CSn
(
RAS
)
AS
T
p
Tr
T
c2
D
15
to D
0
T
2
T
c1
T
1
T
c2
T
c1
PB4/PB5
(
UCAS
/
LCAS
)
Note: n = 2 to 5
DRAM access
DRAM access
External space
access
Figure 6.23 Example of Operation Timing in RAS Up Mode

157
6.5.11
Refresh Control
The H8/3006 and H8/3007 are provided with a CAS-before-RAS (CBR) function and self-refresh
function as DRAM refresh control functions.
CAS-Before-RAS (CBR) Refreshing: To select CBR refreshing, set the RCYCE bit to 1 in
DRCRB.
With CBR refreshing, RTCNT counts up using the input clock selected by bits CKS2 to CKS0 in
RTMCSR, and a refresh request is generated when the count matches the value set in RTCOR
(compare match). At the same time, RTCNT is reset and starts counting up again from H'00.
Refreshing is thus repeated at fixed intervals determined by RTCOR and bits CKS2 to CKS0. A
refresh cycle is executed after this refresh request has been accepted and the DRAM interface has
acquired the bus. Set a value in bits CKS2 to CKS0 in RTCOR that will meet the refresh interval
specification for the DRAM used. When RAS down mode is used, set the refresh interval so that
the maximum
RAS pulse width specification is met.
RTCNT starts counting up when bits CKS2 to CKS0 are set. RTCNT and RTCOR settings should
therefore be completed before setting bits CKS2 to CKS0.
Also note that a repeat refresh request generated during a bus request, or a refresh request during
refresh cycle execution, will be ignored.
RTCNT operation is shown in figure 6.24, compare match timing in figure 6.25, and CBR refresh
timing in figures 6.26 and 6.27.
RTCNT
RTCOR
H'00
Refresh request
Figure 6.24 RTCNT Operation
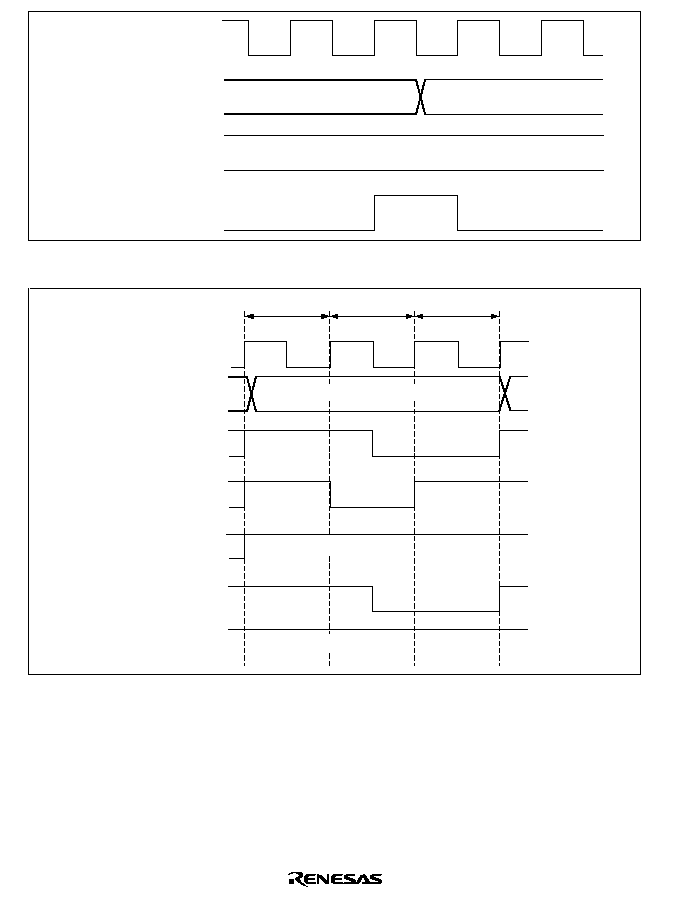
158
N
N
H'00
RTCNT
RTCOR
Refresh request signal
and CMF bit setting signal
Figure 6.25 Compare Match Timing
T
Rp
T
R1
T
R2
CS
n
(
RAS
)
(
UCAS
/
LCAS
)
PB4/PB5
RD
(
WE
)
RFSH
AS
Address bus
Area 2 start address
High
High
Figure 6.26 CBR Refresh Timing (CSEL = 0, TPC = 0, RLW = 0)
The basic CBS refresh cycle timing comprises three states: one RAS precharge cycle (T
RP
) state,
and two RAS output cycle (T
R1
, T
R2
) states. Either one or two states can be selected for the RAS
precharge cycle. When the TPC bit is set to 1 in DRCRB,
RAS signal output is delayed by one
cycle. This does not affect the timing of
UCAS and LCAS output.
Use the RLW bit in DRCRB to adjust the RAS signal width. A single refresh wait state (T
RW
) can
be inserted between the T
R1
state and T
R2
state by setting the RLW bit to 1.

159
The RLW bit setting is valid only for CBR refresh cycles, and does not affect DRAM read/write
cycles. The number of states in the CBR refresh cycle is not affected by the settings in ASTCR,
WCRH, or WCRL, or by the state of the
WAIT pin.
Figure 6.27 shows the timing when the TPC bit and RLW bit are both set to 1.
T
Rp1
T
RP2
T
R1
T
RW
RD
(
WE
)
CS
n
(
RAS
)
(
UCAS
/
LCAS
)
PB4/PB5
T
R2
RFSH
AS
Address bus
Area 2 start address
High
High
Figure 6.27 CBR Refresh Timing (CSEL = 0, TPC = 1, RLW = 1)
DRAM must be refreshed immediately after powering on in order to stabilize its internal state.
When using the H8/3006 and H8/3007 CAS-before-RAS refresh function, therefore, a DRAM
stabilization period should be provided by means of interrupts by another timer module, or by
counting the number of times bit 7 (CMF) of RTMCSR is set, for instance, immediately after bits
DRAS2 to DRAS0 have been set in DRCRA.
Self-Refreshing: A self-refresh mode (battery backup mode) is provided for DRAM as a kind of
standby mode. In this mode, refresh timing and refresh addresses are generated within the
DRAM. The H8/3006 and H8/3007 have a function that places the DRAM in self-refresh mode
when the chip enters software standby mode.
To use the self-refresh function, set the SRFMD bit to 1 in DRCRA. When a SLEEP instruction is
subsequently executed in order to enter software standby mode, the
CAS and RAS signals are
output and the DRAM enters self-refresh mode, as shown in figure 6.28.
When the chip exits software standby mode,
CAS and RAS outputs go high.
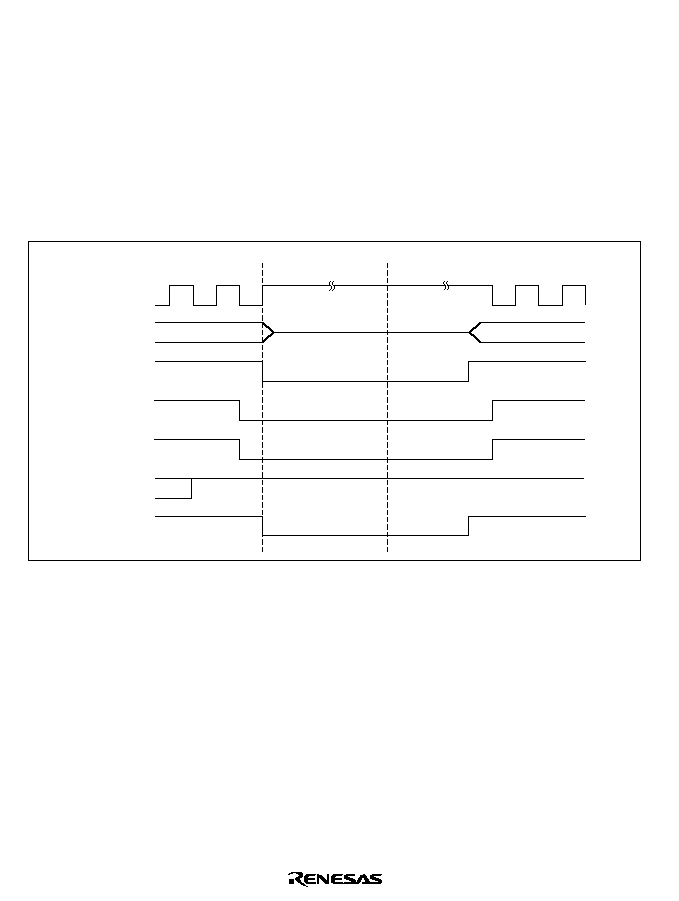
160
The following conditions must be observed when the self-refresh function is used:
∑
When burst access is selected, RAS up mode must be selected before executing a SLEEP
instruction in order to enter software standby mode. Therefore, if RAS down mode has been
selected, the RDM bit in DRCRA must be cleared to 0 and RAS up mode selected before
executing the SLEEP instruction. Select RAS down mode again after exiting software standby
mode.
∑
The instruction immediately following a SLEEP instruction must not be located in an area
designated as DRAM space.
The self-refresh function will not work properly unless the above conditions are observed.
CS
n
(
RAS
)
Address bus
PB4
(
UCAS
)
PB5
(
LCAS
)
RD
(
WE
)
RFSH
Software standby
mode
Oscillation stabilization
time
High-impedance
Figure 6.28 Self-Refresh Timing (CSEL = 0)
Refresh Signal (
RFSH): A refresh signal (RFSH) that transmits a refresh cycle off-chip can be
output by setting the RFSHE bit to 1 in DRCRA.
RFSH output timing is shown in figures 6.26,
6.27, and 6.28.
6.5.12
Examples of Use
Examples of DRAM connection and program setup procedures are shown below. When the
DRAM interface is used, check the DRAM device characteristics and choose the most appropriate
method of use for that device.
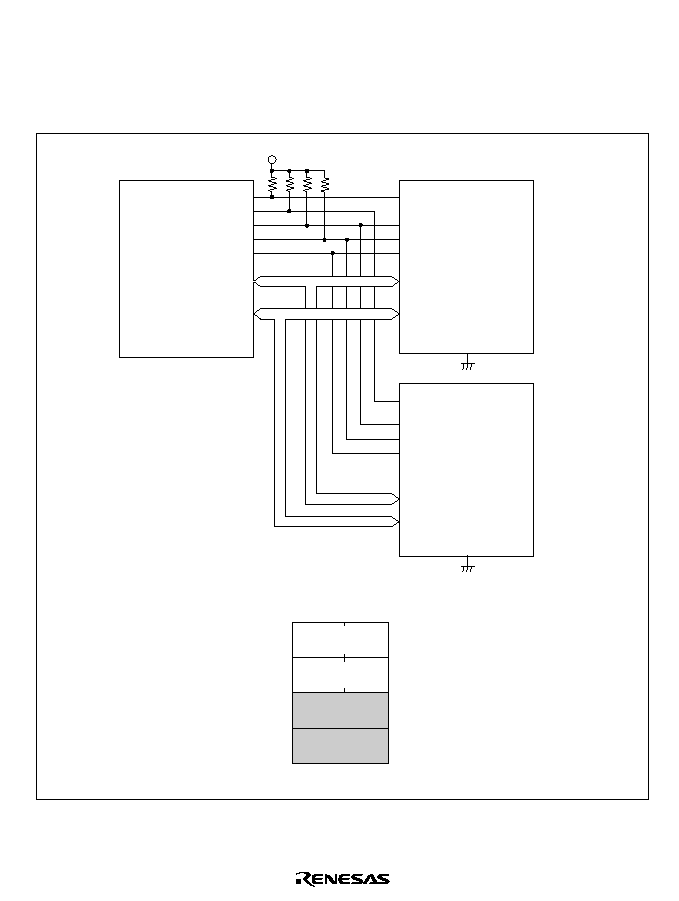
161
Connection Examples
∑
Figure 6.29 shows typical interconnections when using two 2-CAS type 16-Mbit DRAMs
using a
◊
16-bit organization, and the corresponding address map. The DRAMs used in this
example are of the 10-bit row address
◊
10-bit column address type. Up to four DRAMs can
be connected by designating areas 2 to 5 as DRAM space.
CS2
(
RAS2
)
CS3
(
RAS3
)
RD
(
WE
)
A10-A1
D15-D0
A9-A0
D15-D0
PB4 (
UCAS
)
PB5(
LCAS
)
RAS
WE
UCAS
LCAS
A9-A0
D15-D0
RAS
WE
UCAS
LCAS
No.1
No.2
OE
OE
DRAM (No. 1)
H'400000
H'5FFFFE
H'600000
H'7FFFFE
H'800000
H'9FFFFE
H'A00000
H'BFFFFE
DRAM (No. 2)
Normal
Normal
CS2
(
RAS2
)
CS3
(
RAS3
)
CS4
CS5
PB4
(
UCAS
)
PB5
(
LCAS
)
15
0
7
8
H8/3006 and H8/3007
2-CAS 16-Mbit DRAM
10-bit row address x 10-bit column address
x16-bit organization
(a) Interconnections (example)
(b) Address map
Area 2
Area 3
Area 4
Area 5
Figure 6.29 Interconnections and Address Map for 2-CAS 16-Mbit DRAMs with
◊◊◊
◊
16-Bit
Organization
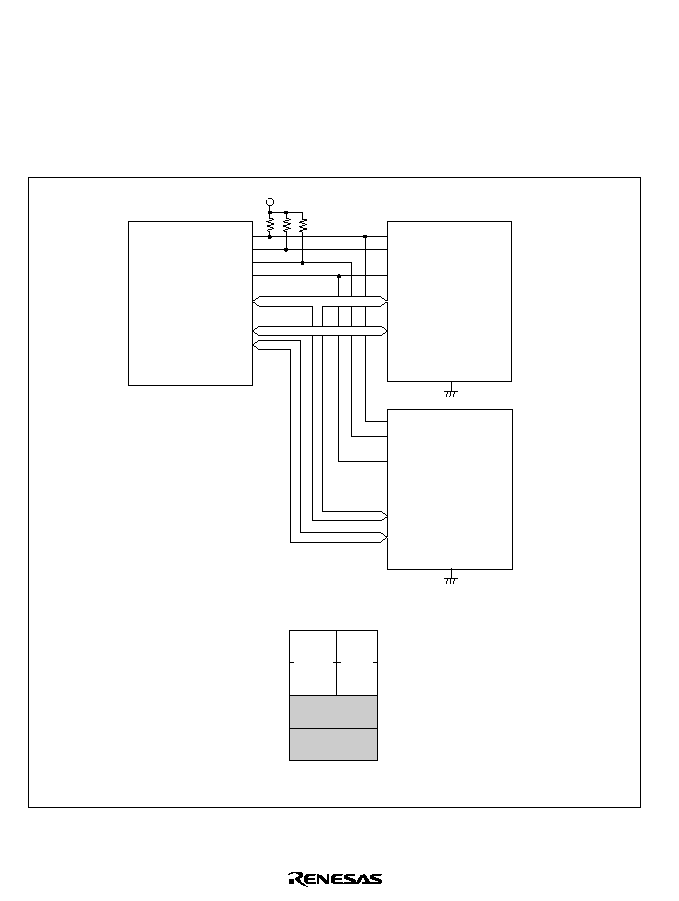
162
∑
Figure 6.30 shows typical interconnections when using two 16-Mbit DRAMs using a
◊
8-bit
organization, and the corresponding address map. The DRAMs used in this example are of the
11-bit row address
◊
10-bit column address type. The
CS2 pin is used as a common RAS
output pin for area 2 and area 3. When the
DRAM address space spans a number of contiguous
areas, as in this example, the appropriate setting of bits DRAS2 to DRAS0 enables a single
CS
pin to be used as the common
RAS output pin for a number of areas, and makes it possible to
directly connect large-capacity DRAM with address space that spans a maximum of four areas.
Any unused
CS pins (in this example, the CS3 pin) can be used as input/output ports.
CS2
(
RAS2
)
RD
(
WE
)
A21, A10-A1
D15-D8
D7-D0
A10-A0
D7-D0
PB4 (
UCAS
)
PB5 (
LCAS
)
RAS
WE
CAS
A10-A0
D7-D0
RAS
WE
CAS
No.1
No.2
OE
OE
DRAM
(No.1)
H'400000
H'5FFFFE
H'600000
H'7FFFFE
H'800000
H'9FFFFE
H'A00000
H'BFFFFE
DRAM
(No.2)
CS2
(
RAS2
)
CS4
CS5
PB4
(
UCAS
)
PB5
(
LCAS
)
15
0
7
8
H8/3006 and H8/3007
2-CAS 16-Mbit DRAM
11-bit row address x 10-bit column address
x8-bit organization
(a) Interconnections (example)
(b) Address map
16-Mbyte mode
Area 2
Area 3
Area 4
Area 5
Normal
Normal
Figure 6.30 Interconnections and Address Map for 16-Mbit DRAMs with
◊◊◊
◊
8-Bit
Organization

163
∑
Figure 6.31 shows typical interconnections when using two 4-Mbit DRAMs, and the
corresponding address map. The DRAMs used in this example are of the 9-bit row address
◊
9-bit column address type. In this example, upper address decoding allows multiple DRAMs
to be connected to a single area. The
RFSH pin is used in this case, since both DRAMs must
be refreshed simultaneously. However, note that RAS down mode cannot be used in this
interconnection example.
CS2
(
RAS2
)
RD
(
WE
)
A9-A1
D15-D0
A8-A0
D15-D0
PB4 (
UCAS
)
PB5 (
LCAS
)
RAS
WE
UCAS
LCAS
A8-A0
D15-D0
RAS
WE
UCAS
LCAS
No.1
No.2
OE
OE
DRAM (No.1)
H'400000
H'47FFFE
H'480000
H'4FFFFE
H'500000
H'5FFFFE
DRAM (No.2)
Not used
(a) Interconnections (example)
CS2
(
RAS2
)
PB4
(
UCAS
)
PB5
(
LCAS
)
15
0
7
8
Area 2
16-Mbyte mode
(b) Address map
H8/3006 and H8/3007
2-CAS 4-Mbit DRAM
9-bit row address x 9-bit column address
x16-bit organization
RFSH
A19
Figure 6.31 Interconnections and Address Map for 2-CAS 4-Mbit DRAMs with
◊◊◊
◊
16-Bit
Organization

164
Example of Program Setup Procedure: Figure 6.32 shows an example of the program setup
procedure.
Set ABWCR
Set RTCOR
Set bits CKS2 to CKS0 in RTMCSR
Set DRCRB
Set DRCRA
Wait for DRAM stabilization time
DRAM can be accessed
Figure 6.32 Example of Setup Procedure when Using DRAM Interface
6.5.13
Usage Notes
Note the following points when using the DRAM refresh function.
∑
Refresh cycles will not be executed when the external bus released state, software standby
mode, or a bus cycle is extended by means of wait state insertion. Refreshing must therefore
be performed by other means in these cases.
∑
If a refresh request is generated internally while the external bus is released, the first request is
retained and a single refresh cycle will be executed after the bus-released state is cleared.
Figure 6.33 shows the bus cycle in this case.
∑
When a bus cycle is extended by means of wait state insertion, the first request is retained in
the same way as when the external bus has been released.
∑
In the event of contention with a bus request from an external bus master when a transition is
made to software standby mode, the
BACK and strobe states may be indeterminate after the
transition to software standby mode (see figure 6.34).
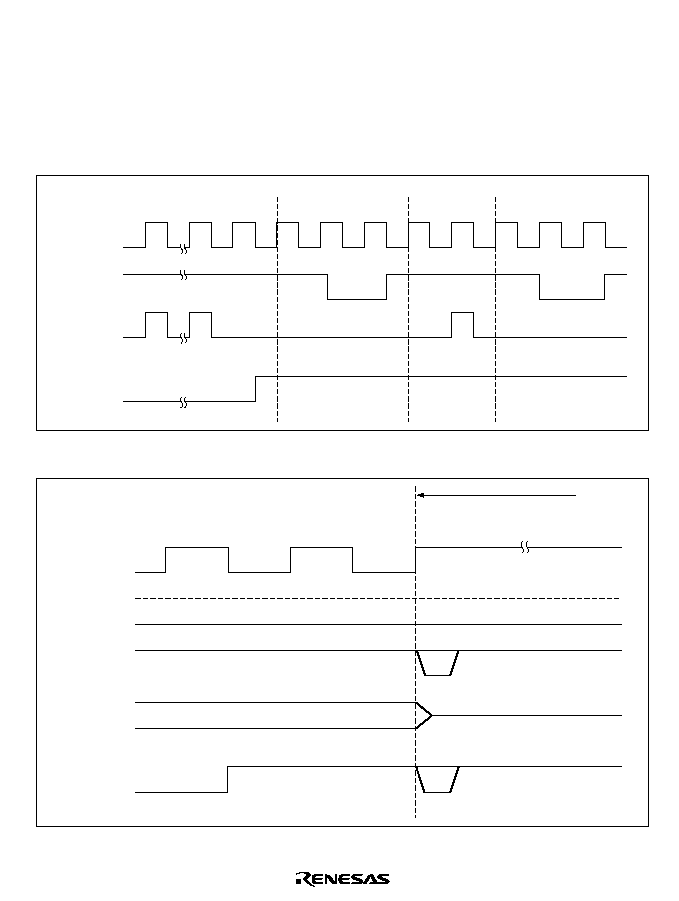
165
When software standby mode is used, the BRLE bit should be cleared to 0 in BRCR before
executing the SLEEP instruction.
Similar contention in a transition to self-refresh mode may prevent dependable strobe
waveform output. This can also be avoided by clearing the BRLW bit to 0 in BRCR.
∑
Immediately after self-refreshing is cleared, external bus release is possible during a given
period until the start of a CPU cycle. Attention must be paid to the
RAS state to ensure that the
specification for the
RAS precharge time immediately after self-refreshing is met.
RFSH
Refresh
request
BACK
External bus released
Refresh cycle
CPU cycle
Refresh cycle
Figure 6.33 Bus-Released State and Refresh Cycles
BREQ
BACK
Software standby mode
Address bus
Strobe
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
;;;;;;
Figure 6.34 Bus-Released State and Software Standby Mode
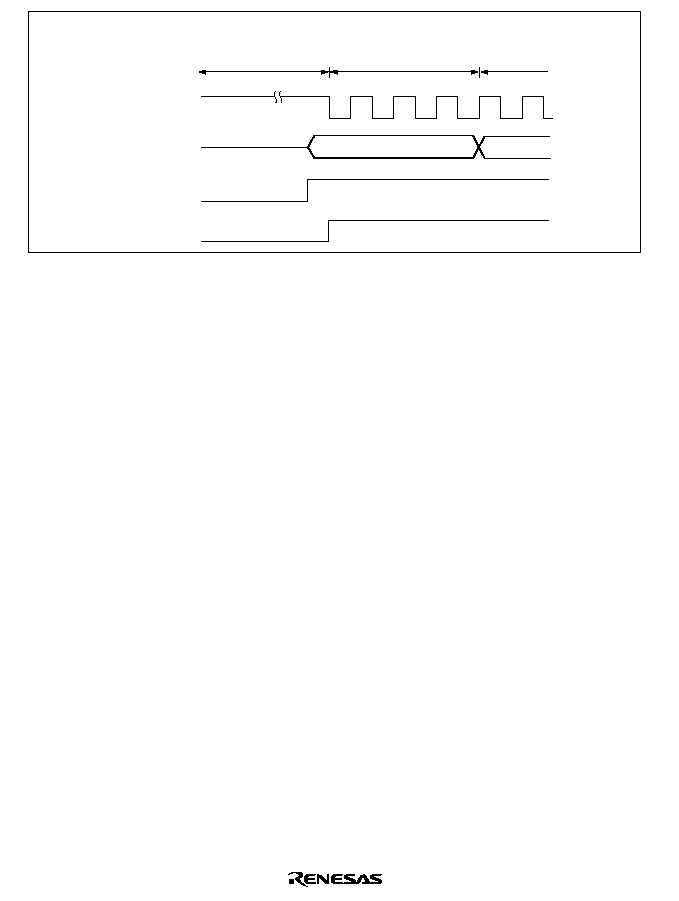
166
@SP
RAS
CAS
Oscillation stabilization
time on exit from software
standby mode
CPU internal cycle
(period in which external
bus can be released)
CPU cycle
Address
Figure 6.35 Self-Refresh Clearing
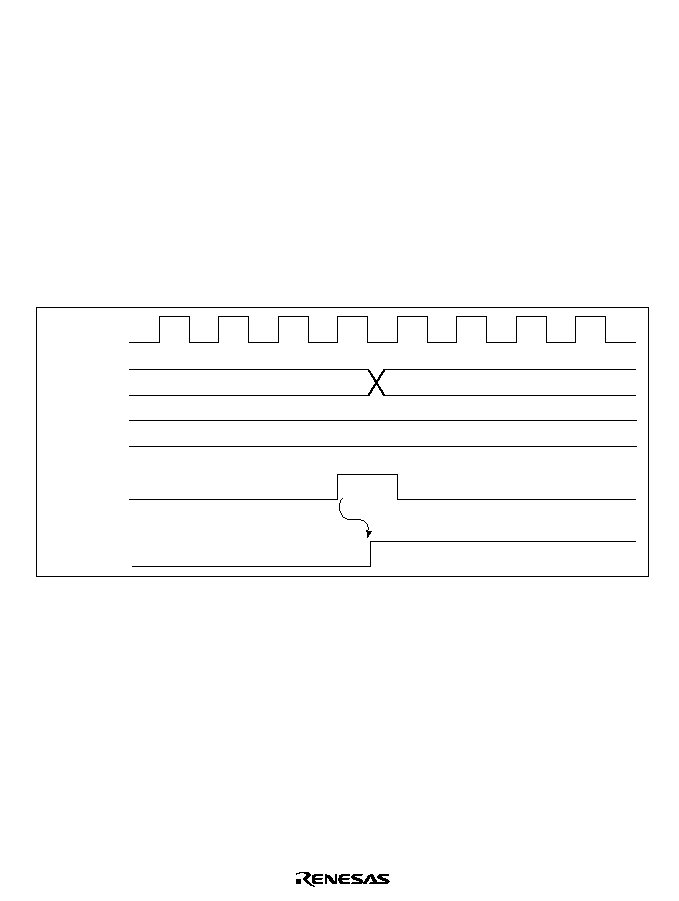
167
6.6
Interval Timer
6.6.1
Operation
When DRAM is not connected to the H8/3006 and H8/3007 chip, the refresh timer can be used as
an interval timer by clearing bits DRAS2 to DRAS0 in DRCRA to 0. After setting RTCOR,
selection a clock source with bits CKS2 to CKS0 in RTMCSR, and set the CMIE bit to 1.
Timing of Setting of Compare Match Flag and Clearing by Compare Match: The CMF flag
in RTMCSR is set to 1 by a compare match output when the RTCOR and RTCNT values match.
The compare match signal is generated in the last state in which the values match (when RTCNT
is updated from the matching value to a new value). Accordingly, when RTCNT and RTCOR
match, the compare match signal is not generated until the next counter clock pulse. Figure 6.36
shows the timing.
N
N
H'00
RTCNT
CMF
RTCOR
Compare match
signal
Figure 6.36 Timing of CMF Flag Setting
Operation in Power-Down State: The interval timer operates in sleep mode. It does not operate
in hardware standby mode. In software standby mode, RTCNT and RTMCSR bits 7 and 6 are
initialized, but RTMCSR bits 5 to 3 and RTCOR retain their settings prior to the transition to
software standby mode.
Contention between RTCNT Write and Counter Clear: If a counter clear signal occurs in the
T
3
state of an RTCNT write cycle, clearing of the counter takes priority and the write is not
performed. See Figure 6.37.
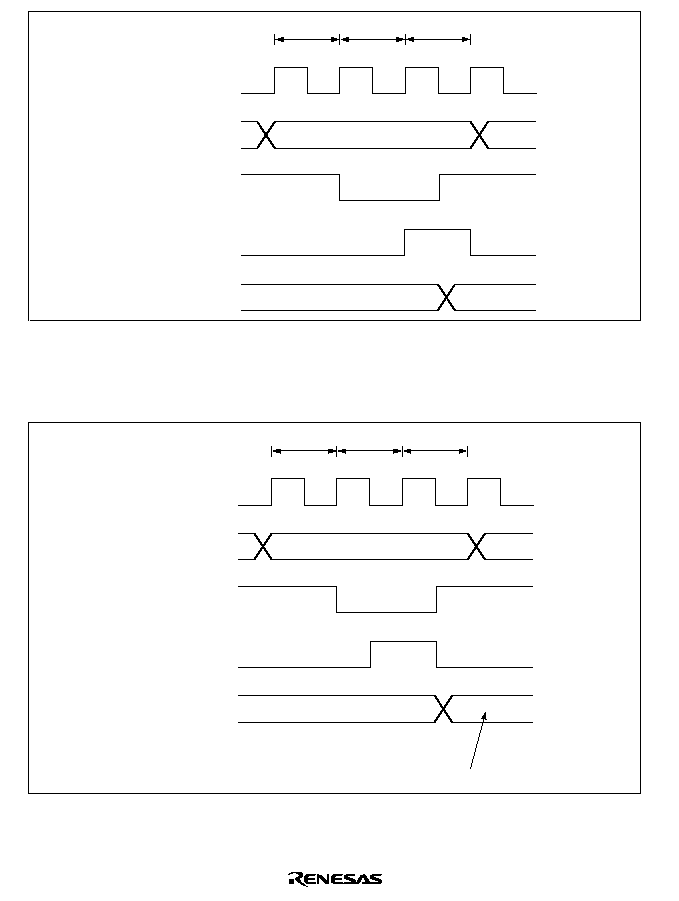
168
H'00
RTCNT
Address bus
Internal write signal
Counter clear signal
T
1
T
2
T
3
N
RTCNT address
Figure 6.37 Contention between RTCNT Write and Clear
Contention between RTCNT Write and Increment: If an increment pulse occurs in the T
3
state
of an RTCNT write cycle, writing takes priority and RTCNT is not incremented. See Figure 6.38.
M
RTCNT
T
1
T
2
T
3
N
Address bus
RTCNT address
Internal write signal
RTCNT input clock
Counter write data
Figure 6.38 Contention between RTCNT Write and Increment
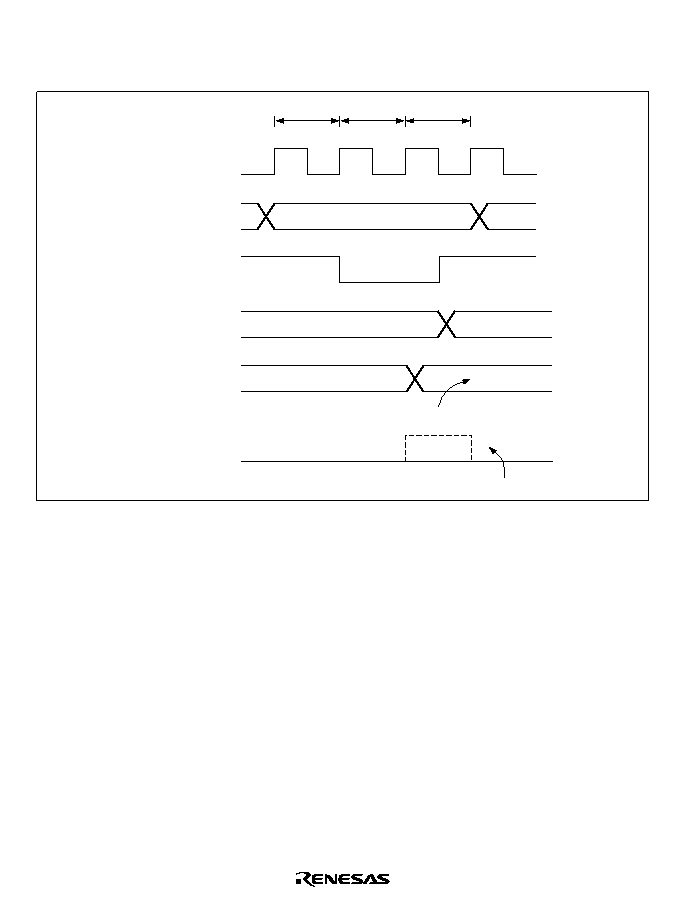
169
Contention between RTCOR Write and Compare Match: If a compare match occurs in the T
3
state of an RTCOR write cycle, writing takes priority and the compare match signal is inhibited.
See Figure 6.39.
M
RTCOR
Compare match signal
T
1
T
2
T
3
N
N+1
N
RTCNT
Internal write signal
Address bus
RTCOR address
RTCOR write data
Inhibited
Figure 6.39 Contention between RTCOR Write and Compare Match
RTCNT Operation at Internal Clock Source Switchover: Switching internal clock sources may
cause RTCNT to increment, depending on the switchover timing. Table 6.10 shows the relation
between the time of the switchover (by writing to bits CKS2 to CKS0) and the operation of
RTCNT.
The RTCNT input clock is generated from the internal clock source by detecting the falling edge
of the internal clock. If a switchover is made from a high clock source to a low clock source, as in
case No. 3 in table 6.10, the switchover will be regarded as a falling edge, an RTCNT clock pulse
will be generated, and RTCNT will be incremented.
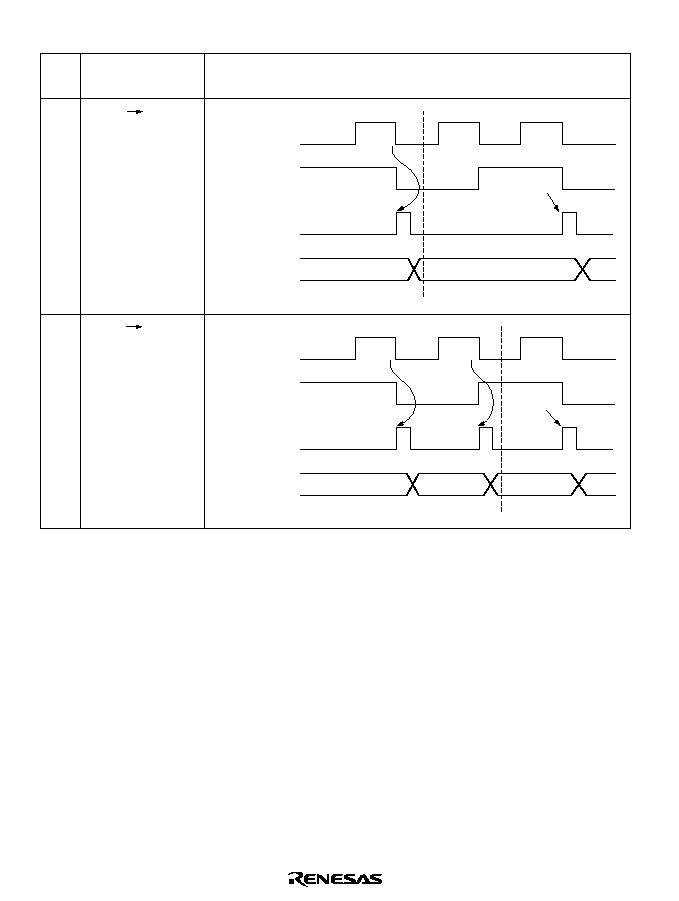
170
Table 6.10
Internal Clock Switchover and RTCNT Operation
N
N+1
No.
1
N
N+1
2
N+2
CKS2 to CKS0
Write Timing
RTCNT Operation
Low Low
switchover*
1
Low High
switchover*
2
Old clock source
New clock source
RTCNT clock
RTCNT
Old clock source
New clock source
RTCNT clock
RTCNT
CKS bits rewritten
CKS bits rewritten
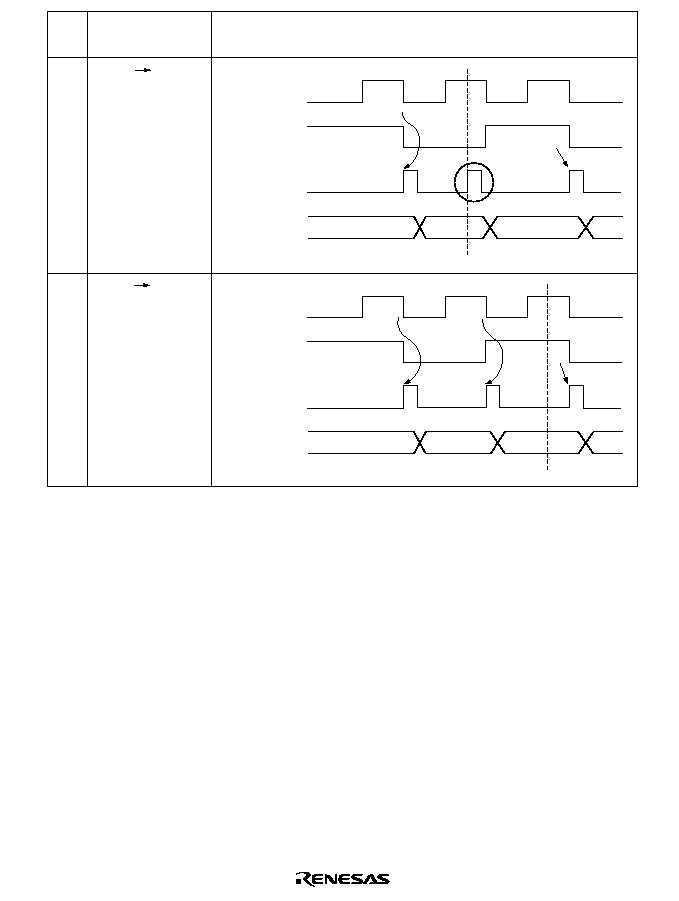
171
N
N+1
No.
3
N
N+1
RTCNT
4
N+2
N+2
*
4
CKS2 to CKS0
Write Timing
RTCNT Operation
High Low
switchover*
3
High High
switchover*
4
Old clock source
New clock source
RTCNT clock
RTCNT
Old clock source
New clock source
RTCNT clock
CKS bits rewritten
CKS bits rewritten
Notes: 1. Including switchovers from a low clock source to the halted state, and from the halted
state to a low clock source.
2. Including switchover from the halted state to a high clock source.
3. Including switchover from a high clock source to the halted state.
4. The switchover is regarded as a falling edge, causing RTCNT to increment.

172
6.7
Interrupt Sources
Compare match interrupts (CMI) can be generated when the refresh timer is used as an interval
timer. Compare match interrupt requests are masked/unmasked with the CMIE bit in RTMCSR.
6.8
Burst ROM Interface
6.8.1
Overview
With the H8/3006 and H8/3007, external space area 0 can be designated as burst ROM space, and
burst ROM space interfacing can be performed. The burst ROM interface enables ROM with
burst access capability to be accessed at high speed. Area 0 is designated as burst ROM space by
means of the BROME bit in BCR.
Continuous burst access of a maximum or four or eight words can be performed on external space
area 0. Two or three states can be selected for burst access.
6.8.2
Basic Timing
The number of states in the initial cycle (full access) and a burst cycle of the burst ROM interface
is determined by the setting of the AST0 bit in ASTCR. When the AST0 bit is set to 1, wait states
can also be inserted in the initial cycle. Wait states cannot be inserted in a burst cycle.
Burst access of up to four words is performed when the BRSTS0 bit is cleared to 0 in BCR, and
burst access of up to eight words when the BRSTS0 bit is set to 1. The number of burst access
states is two when the BRSTS1 bit is cleared to 0, and three when the BRSTS1 bit is set to 1.
The basic access timing for burst ROM space is shown in figure 6.40.
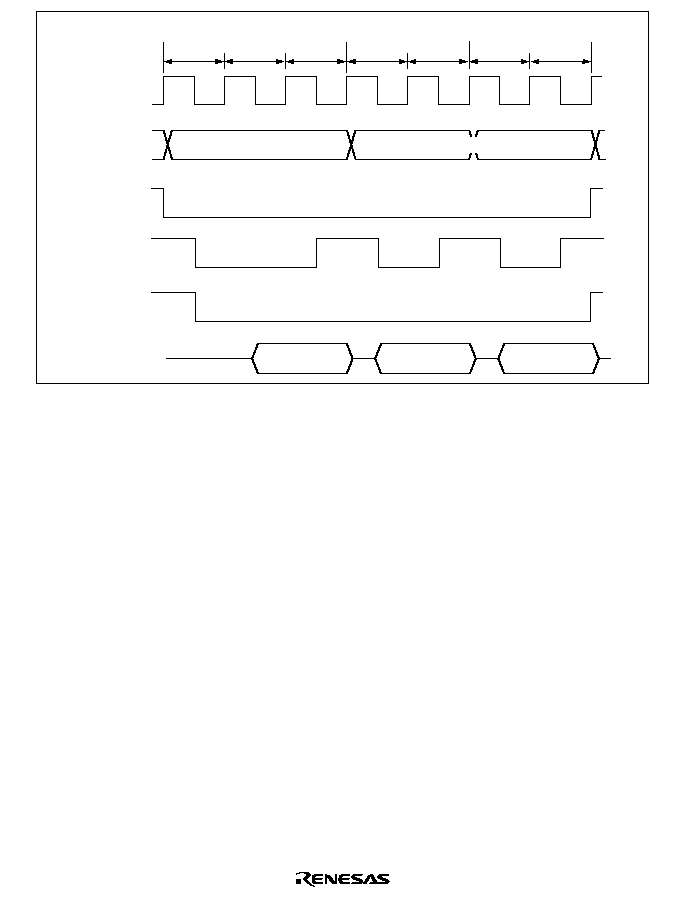
173
T
1
T
2
T
3
T
1
T
2
T
1
T
2
RD
AS
CS
0
Full access
Burst access
Address bus
Only lower address changes
Read data
Read data
Read data
Data bus
Figure 6.40 Example of Burst ROM Access Timing
6.8.3
Wait Control
As with the basic bus interface, either program wait insertion or pin wait insertion using the
WAIT
pin can be used in the initial cycle (full access) of the burst ROM interface.
Wait states cannot be inserted in a burst cycle.

174
6.9
Idle Cycle
6.9.1
Operation
When the H8/3006 and H8/3007 chip accesses external space, it can insert a 1-state idle cycle (T
I
)
between bus cycles in the following cases: (1) when read accesses between different areas occur
consecutively, (2) when a write cycle occurs immediately after a read cycle, and (3) when external
address space other than DRAM space is accessed immediately after a DRAM space access. By
inserting an idle cycle it is possible, for example, to avoid data collisions between ROM, which
has a long output floating time, and high-speed memory, I/O interfaces, and so on.
The ICIS1 and ICIS0 bits in BCR both have an initial value of 1, so that an idle cycle is inserted in
the initial state. If there are no data collisions, the ICIS bits can be cleared.
Consecutive Reads between Different Areas: If consecutive reads between different areas occur
while the ICIS1 bit is set to 1 in BCR, an idle cycle is inserted at the start of the second read cycle.
Figure 6.41 shows an example of the operation in this case. In this example, bus cycle A is a read
cycle from ROM with a long output floating time, and bus cycle B is a read cycle from SRAM,
each being located in a different area. In (a), an idle cycle is not inserted, and a collision occurs in
cycle B between the read data from ROM and that from SRAM. In (b), an idle cycle is inserted,
and a data collision is prevented.
T
1
T
2
T
3
RD
T
1
T
2
T
1
T
2
T
3
T
i
T
2
T
1
Address bus
Data bus
RD
Address bus
Data bus
Bus cycle A Bus cycle B
Bus cycle A Bus cycle B
Data collision
Long buffer-off time
(a) Idle cycle not inserted
(b) Idle cycle inserted
Figure 6.41 Example of Idle Cycle Operation (1) (ICIS1 = 1)
Write after Read: If an external write occurs after an external read while the ICIS0 bit is set to 1
in BCR, an idle cycle is inserted at the start of the write cycle.
Figure 6.42 shows an example of the operation in this case. In this example, bus cycle A is a read
cycle from ROM with a long output floating time, and bus cycle B is a CPU write cycle.
In (a), an idle cycle is not inserted, and a collision occurs in cycle B between the read data from
ROM and the CPU write data. In (b), an idle cycle is inserted, and a data collision is prevented.
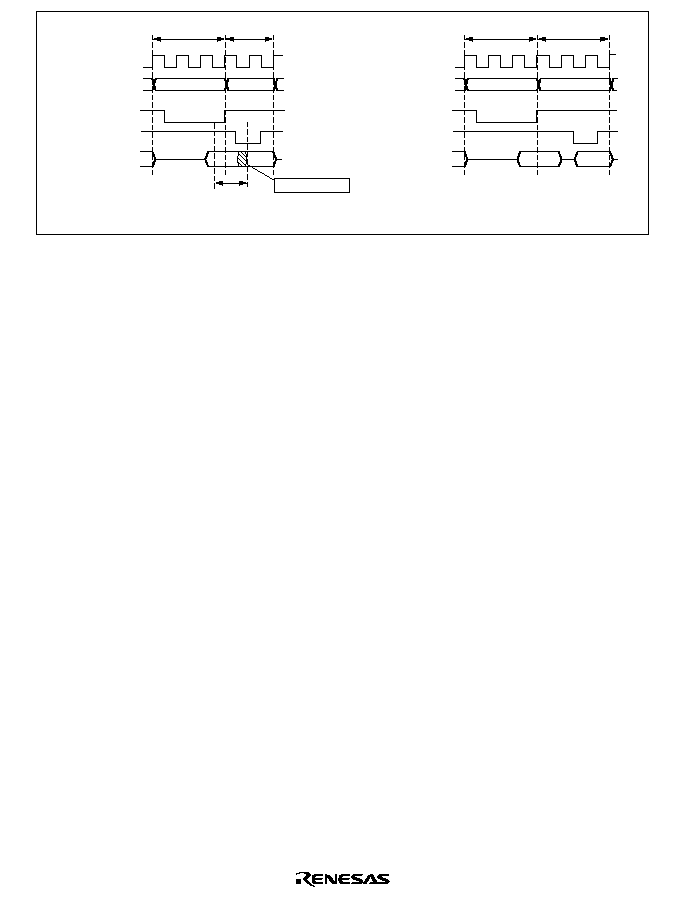
175
T
1
T
2
T
3
RD
Address bus
Data bus
T
1
T
2
T
1
T
2
T
3
T
i
T
2
T
1
HWR
RD
Address bus
Data bus
HWR
Bus cycle A Bus cycle B
Bus cycle A Bus cycle B
Long buffer-off time
Data collision
(a) Idle cycle not inserted
(b) Idle cycle inserted
Figure 6.42 Example of Idle Cycle Operation (2) (ICIS0 = 1)
External Address Space Access Immediately after DRAM Space Access: If a DRAM space
access is followed by a non-DRAM external access when
HWR and LWR have been selected as
the
UCAS and LCAS output pins by means of the CSEL bit in DRCRB, a Ti cycle is inserted
regardless of the settings of bits ICIS0 and ICIS1 in BCR. Figure 6.43 shows an example of the
operation.
This is done to prevent simultaneous changing of the
HWR and LWR signals used as UCAS and
LCAS in DRAM space and CSn for the space in the next cycle, and so avoid an erroneous write to
the external device in the next cycle.
A T
i
cycle is not inserted when PB4 and PB5 have been selected as the
UCAS and LCAS output
pins.
In the case of consecutive DRAM space access precharge cycles (Tp), the ICIS0 and ICIS1 bit
settings are invalid. In the case of consecutive reads between different areas, for example, if the
second access is a DRAM access, only a T
p
cycle is inserted, and a T
i
cycle is not. The timing in
this case is shown in figure 6.44.

176
Address bus
Simultaneous change of
HWR
/
LWR
and
CSn
T
p
T
r
T
c1
T
c2
Bus cycle A
(DRAM access cycle)
HWR
/
LWR
(
UCAS
/
LCAS
)
T
1
T
2
Bus cycle B
CSn
T
p
T
r
T
c1
T
c2
T
1
T
i
T
2
Address bus
HWR
/
LWR
(
UCAS
/
LCAS
)
CSn
Bus cycle A
(DRAM access cycle) Bus cycle B
(a) Idle cycle not inserted
(b) Idle cycle inserted
Figure 6.43 Example of Idle Cycle Operation (3) (
HWR/LWR Used as UCAS/LCAS)
Address bus
T
1
T
2
T
3
Address bus
UCAS
/
LCAS
RD
T
p
T
c1
T
r
T
c2
External read
DRAM space read
Figure 6.44 Example of Idle Cycle Operation (4) (Consecutive Precharge Cycles)
Usage Notes: When non-insertion of idle cycles is set, the rise (negation) of
RD and the fall
(assertion) of
CSn may occur simultaneously. An example of the operation is shown in figure
6.45.
If consecutive reads between different external areas occur while the ICIS1 bit is cleared to 0 in
BCR, or if a write cycle to a different external area occurs after an external read while the ICIS0
bit is cleared to 0, the
RD negation in the first read cycle and the CSn assertion in the following
bus cycle will occur simultaneously. Therefore, depending on the output delay time of each signal,
it is possible that the low-level output of
RD in the preceding read cycle and the low-level output
of
CSn in the following bus cycle will overlap.
A setting whereby idle cycle insertion is not performed can be made only when
RD and CSn do
not change simultaneously, or when it does not matter if they do.
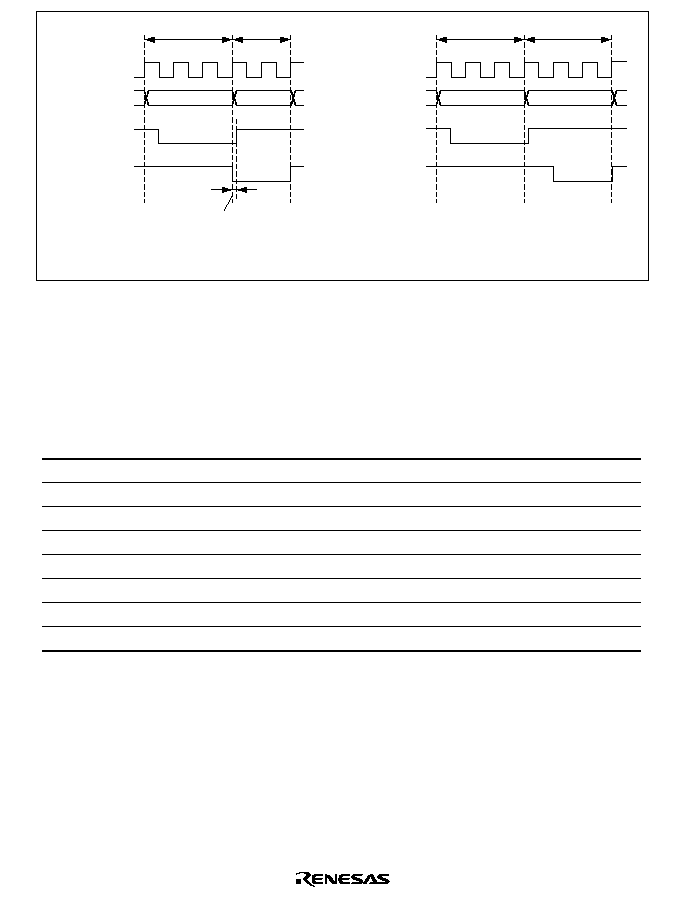
177
Address bus
T
1
T
2
T
3
Bus cycle A
RD
T
1
T
2
(a) Idle cycle not inserted
T
1
T
2
T
3
T
i
T
2
(b) Idle cycle inserted
T
1
Simultaneous change of
RD
and
CSn
Possibility of mutual overlap
CSn
Address bus
RD
CSn
Bus cycle B
Bus cycle A
Bus cycle B
Figure 6.45 Example of Idle Cycle Operation (5)
6.9.2
Pin States in Idle Cycle
Table 6.11 shows the pin states in an idle cycle.
Table 6.11
Pin States in Idle Cycle
Pins
Pin State
A
23
to A
0
Next cycle address value
D
15
to D
0
High impedance
CS
n
High*
UCAS
,
LCAS
High
AS
High
RD
High
HWR
High
LWR
High
Note:
* Remains low in DRAM space RAS down mode.

178
6.10
Bus Arbiter
The bus controller has a built-in bus arbiter that arbitrates between different bus masters. There
are four bus masters: the CPU, DMA controller (DMAC), DRAM interface, and an external bus
master. When a bus master has the bus right it can carry out read, write, or refresh access. Each
bus master uses a bus request signal to request the bus right. At fixed times the bus arbiter
determines priority and uses a bus acknowledge signal to grant the bus to a bus master, which can
the operate using the bus.
The bus arbiter checks whether the bus request signal from a bus master is active or inactive, and
returns an acknowledge signal to the bus master. When two or more bus masters request the bus,
the highest-priority bus master receives an acknowledge signal. The bus master that receives an
acknowledge signal can continue to use the bus until the acknowledge signal is deactivated.
The bus master priority order is:
(High)
External bus master > DRAM interface > DMAC > CPU
(Low)
The bus arbiter samples the bus request signals and determines priority at all times, but it does not
always grant the bus immediately, even when it receives a bus request from a bus master with
higher priority than the current bus master. Each bus master has certain times at which it can
release the bus to a higher-priority bus master.
6.10.1
Operation
CPU: The CPU is the lowest-priority bus master. If the DMAC, DRAM interface, or an external
bus master requests the bus while the CPU has the bus right, the bus arbiter transfers the bus right
to the bus master that requested it. The bus right is transferred at the following times:
∑
The bus right is transferred at the boundary of a bus cycle. If word data is accessed by two
consecutive byte accesses, however, the bus right is not transferred between the two byte
accesses.
∑
If another bus master requests the bus while the CPU is performing internal operations, such as
executing a multiply or divide instruction, the bus right is transferred immediately. The CPU
continues its internal operations.
∑
If another bus master requests the bus while the CPU is in sleep mode, the bus right is
transferred immediately.
DMAC: When the DMAC receives an activation request, it requests the bus right from the bus
arbiter. If the DMAC is bus master and the DRAM interface or an external bus master requests
the bus, the bus arbiter transfers the bus right from the DMAC to the bus master that requested the
bus. The bus right is transferred at the following times.

179
The bus right is transferred when the DMAC finishes transferring one byte or one word. A
DMAC transfer cycle consists of a read cycle and a write cycle. The bus right is not transferred
between the read cycle and the write cycle.
There is a priority order among the DMAC channels. For details see section 7.4.9, Multiple-
Channel Operation.
DRAM Interface: The DRAM interface requests the bus right from the bus arbiter when a refresh
cycle request is issued, and releases the bus at the end of the refresh cycle. For details see section
6.5, DRAM Interface.
External Bus Master: When the BRLE bit is set to 1 in BRCR, the bus can be released to an
external bus master. The external bus master has highest priority, and requests the bus right from
the bus arbiter y driving the
BREQ signal low. Once the external bus master acquires the bus, it
keeps the bus until the
BREQ signal goes high. While the bus is released to an external bus
master, the H8/3006 and H8/3007 chip holds the address bus, data bus, bus control signals (
AS,
RD, HWR, and LWR), and chip select signals (CSn: n = 7 to 0) in the high-impedance state, and
holds the
BACK pin in the low output state.
The bus arbiter samples the
BREQ pin at the rise of the system clock (
). If
BREQ is low, the bus
is released to the external bus master at the appropriate opportunity. The
BREQ signal should be
held low until the
BACK signal goes low.
When the
BREQ pin is high in two consecutive samples, the BACK pin is driven high to end the
bus-release cycle.
Figure 6.46 shows the timing when the bus right is requested by an external bus master during a
read cycle in a two-state access area. There is a minimum interval of three states from when the
BREQ signal goes low until the bus is released.
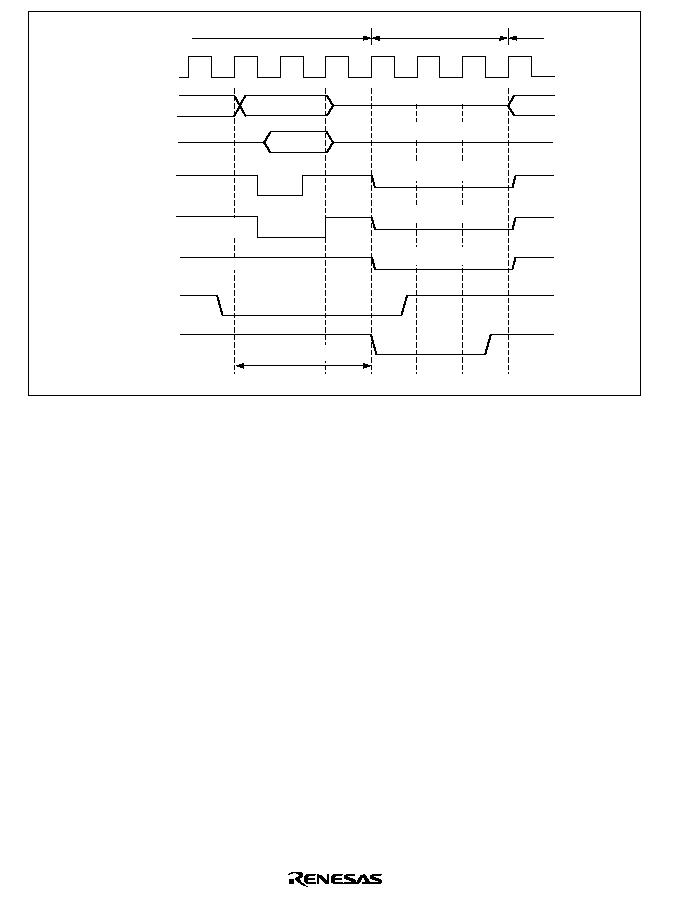
180
RD
BACK
(1)
(2)
(3)
(4)
(5)
(6)
BREQ
HWR
,
LWR
T
0
T
1
T
2
AS
Data bus
Address bus
CPU cycles
CPU cycles
External bus released
High
Address
Minimum 3 cycles
High-impedance
High-impedance
High-impedance
High-impedance
High-impedance
Figure 6.46 Example of External Bus Master Operation
In the event of contention with a bus request from an external bus master when a transition is
made to software standby mode, the
BACK and strobe states may be indeterminate after the
transition to software standby mode (see figure 6.34).
When software standby mode is used, the BRLE bit should be cleared to 0 in BRCR before
executing the SLEEP instruction.

181
6.11
Register and Pin Input Timing
6.11.1
Register Write Timing
ABWCR, ASTCR, WCRH, and WCRL Write Timing: Data written to ABWCR, ASTCR,
WCRH, and WCRL takes effect starting from the next bus cycle. Figure 6.47 shows the timing
when an instruction fetched from area 0 changes area 0 from three-state access to two-state access.
T
1
T
2
T
3
T
1
T
2
T
3
T
1
T
2
Address bus
3-state access to area 0
2-state access to area 0
ASTCR address
Figure 6.47 ASTCR Write Timing
DDR and CSCR Write Timing: Data written to DDR or CSCR for the port corresponding to the
CSn pin to switch between CSn output and generic input takes effect starting from the T
3
state of
the DDR write cycle. Figure 6.48 shows the timing when the
CS
1
pin is changed from generic
input to
CS
1
output.
T
1
T
2
T
3
CS
1
Address bus
High-impedance
P8DDR address
Figure 6.48 DDR Write Timing
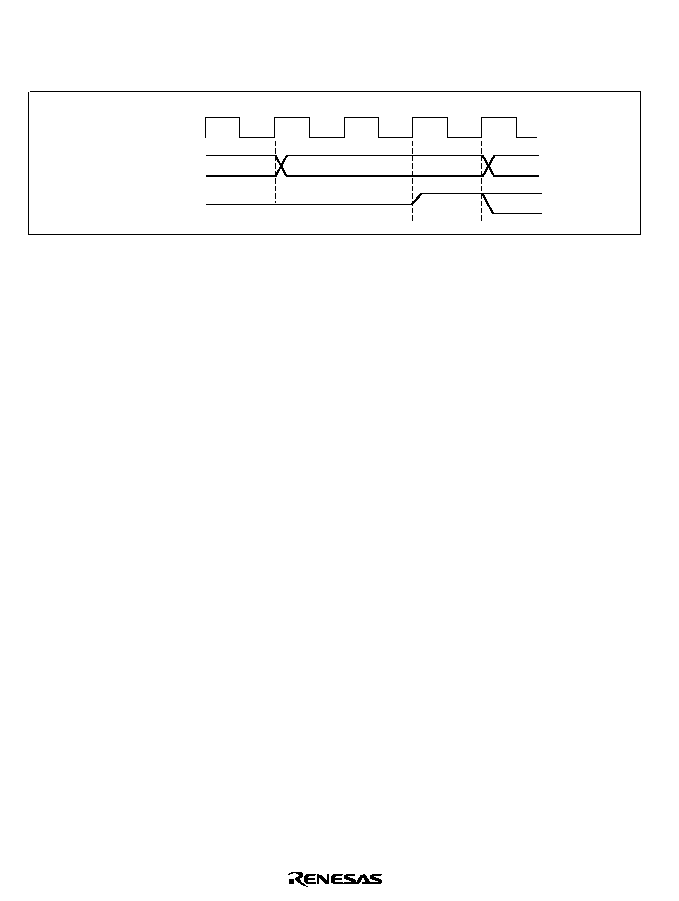
182
BRCR Write Timing: Data written to BRCR to switch between A
23
, A
22
, A
21
, or A
20
output and
generic input or output takes effect starting from the T
3
state of the BRCR write cycle. Figure
6.49 shows the timing when a pin is changed from generic input to A
23
, A
22
, A
21
, or A
20
output.
T
1
T
2
T
3
PA
7
to PA
4
(A
23
to A
20
)
Address bus
BRCR address
High-impedance
Figure 6.49 BRCR Write Timing
6.11.2
BREQ Pin Input Timing
After driving the
BREQ pin low, hold it low until BACK goes low. If BREQ returns to the high
level before
BACK goes lows, the bus arbiter may operate incorrectly.
To terminate the external-bus-released state, hold the
BREQ signal high for at least three states. If
BREQ is high for too short an interval, the bus arbiter may operate incorrectly.

183
Section 7 DMA Controller
7.1
Overview
The H8/3006 and H8/3007 have an on-chip DMA controller (DMAC) that can transfer data on up
to four channels.
When the DMA controller is not used, it can be independently halted to conserve power. For
details see section 19.6, Module Standby Function.
7.1.1
Features
DMAC features are listed below.
∑
Selection of short address mode or full address mode
Short address mode
8-bit source address and 24-bit destination address, or vice versa
Maximum four channels available
Selection of I/O mode, idle mode, or repeat mode
Full address mode
24-bit source and destination addresses
Maximum two channels available
Selection of normal mode or block transfer mode
∑
Directly addressable 16-Mbyte address space
∑
Selection of byte or word transfer
∑
Activation by internal interrupts, external requests, or auto-request (depending on transfer
mode)
16-bit integrated timer unit (ITU) compare match/input capture interrupts (
◊
3)
Serial communication interface (SCI channel 0) transmit-data-empty/receive-data-full
interrupts
External requests
Auto-request
A/D converter conversion-end interrupt

184
7.1.2
Block Diagram
Figure 7.1 shows a DMAC block diagram.
IMIA0
IMIA1
IMIA2
ADI
TXI0
RXI0
DREQ
0
DREQ
1
TEND
0
TEND
1
DEND0A
DEND0B
DEND1A
DEND1B
DTCR0A
DTCR0B
DTCR1A
DTCR1B
Control logic
Data buffer
Address buffer
Arithmetic-logic unit
MAR0A
MAR0B
MAR1A
MAR1B
IOAR0A
IOAR0B
IOAR1A
IOAR1B
ETCR0A
ETCR0B
ETCR1A
ETCR1B
Internal address bus
Internal
interrupts
Interrupt
signals
Internal data bus
Module data b
u
s
Legend
DTCR:
MAR:
IOAR:
ETCR:
Data transfer control register
Memory address register
I/O address register
Execute transfer count register
Channel
0A
Channel
0B
Channel
1A
Channel
1B
Channel
0
Channel
1
Figure 7.1 Block Diagram of DMAC
185
7.1.3
Functional Overview
Table 7.1 gives an overview of the DMAC functions.
Table 7.1
DMAC Functional Overview
Address
Reg. Length
Transfer Mode
Activation
Source
Destina-
tion
Short
address
mode
I/O mode
∑
Transfers one byte or one word
per request
∑
Increments or decrements the memory
address by 1 or 2
∑
Executes 1 to 65,536 transfers
∑
Compare match/input
capture A interrupts from 16-
bit timer channels
0 to 2
∑
Transmit-data-empty
interrupt from SCI channel 0
24
8
Idle mode
∑
Transfers one byte or one word per
request
∑
Holds the memory address fixed
∑
Conversion-end interrupt
from A/D converter
∑
Receive-data-full interrupt
from SCI channel 0
8
24
∑
Executes 1 to 65,536 transfers
Repeat mode
∑
Transfers one byte or one word per
request
∑
Increments or decrements the memory
address by 1 or 2
∑
Executes a specified number (1 to
255) of transfers, then returns to the
initial state and continues
∑
External request
24
8
Full
address
mode
Normal mode
∑
Auto-request
Retains the transfer request
internally
Executes a specified number(1 to
65,536) of transfers continuously
Selection of burst mode or cycle-
steal mode
∑
External request
Transfers one byte or one word
per request
Executes 1 to 65,536 transfers
∑
Auto-request
∑
External request
24
24
Block transfer
∑
Transfers one block of a specified size
per request
∑
Executes 1 to 65,536 transfers
∑
Allows either the source or destination
to be a fixed block area
∑
Block size can be 1 to 255 bytes or
words
∑
Compare match/ input
capture A interrupts from 16-
bit timer channels 0 to 2
∑
External request
∑
Conversion-end interrupt
from A/D converter
24
24
186
7.1.4
Pin Configuration
Table 7.2 lists the DMAC pins.
Table 7.2
DMAC Pins
Channel
Name
Abbrevia-
tion
Input/
Output
Function
0
DMA request 0
DREQ
0
Input
External request for DMAC channel 0
Transfer end 0
TEND
0
Output
Transfer end on DMAC channel 0
1
DMA request 1
DREQ
1
Input
External request for DMAC channel 1
Transfer end 1
TEND
1
Output
Transfer end on DMAC channel 1
Note: External requests cannot be made to channel A in short address mode.
7.1.5
Register Configuration
Table 7.3 lists the DMAC registers.
187
Table 7.3
DMAC Registers
Channel
Address*
Name
Abbreviation R/W
Initial Value
0
H'FFF20
Memory address register 0AR
MAR0AR
R/W
Undetermined
H'FFF21
Memory address register 0AE
MAR0AE
R/W
Undetermined
H'FFF22
Memory address register 0AH
MAR0AH
R/W
Undetermined
H'FFF23
Memory address register 0AL
MAR0AL
R/W
Undetermined
H'FFF26
I/O address register 0A
IOAR0A
R/W
Undetermined
H'FFF24
Execute transfer count register 0AH ETCR0AH
R/W
Undetermined
H'FFF25
Execute transfer count register 0AL ETCR0AL
R/W
Undetermined
H'FFF27
Data transfer control register 0A
DTCR0A
R/W
H'00
H'FFF28
Memory address register 0BR
MAR0BR
R/W
Undetermined
H'FFF29
Memory address register 0BE
MAR0BE
R/W
Undetermined
H'FFF2A
Memory address register 0BH
MAR0BH
R/W
Undetermined
H'FFF2B
Memory address register 0BL
MAR0BL
R/W
Undetermined
H'FFF2E
I/O address register 0B
IOAR0B
R/W
Undetermined
H'FFF2C
Execute transfer count register 0BH ETCR0BH
R/W
Undetermined
H'FFF2D
Execute transfer count register 0BL ETCR0BL
R/W
Undetermined
H'FFF2F
Data transfer control register 0B
DTCR0B
R/W
H'00
1
H'FFF30
Memory address register 1AR
MAR1AR
R/W
Undetermined
H'FFF31
Memory address register 1AE
MAR1AE
R/W
Undetermined
H'FFF32
Memory address register 1AH
MAR1AH
R/W
Undetermined
H'FFF33
Memory address register 1AL
MAR1AL
R/W
Undetermined
H'FFF36
I/O address register 1A
IOAR1A
R/W
Undetermined
H'FFF34
Execute transfer count register 1AH ETCR1AH
R/W
Undetermined
H'FFF35
Execute transfer count register 1AL ETCR1AL
R/W
Undetermined
H'FFF37
Data transfer control register 1A
DTCR1A
R/W
H'00
H'FFF38
Memory address register 1BR
MAR1BR
R/W
Undetermined
H'FFF39
Memory address register 1BE
MAR1BE
R/W
Undetermined
H'FFF3A
Memory address register 1BH
MAR1BH
R/W
Undetermined
H'FFF3B
Memory address register 1BL
MAR1BL
R/W
Undetermined
H'FFF3E
I/O address register 1B
IOAR1B
R/W
Undetermined
H'FFF3C
Execute transfer count register 1BH ETCR1BH
R/W
Undetermined
H'FFF3D
Execute transfer count register 1BL ETCR1BL
R/W
Undetermined
H'FFF3F
Data transfer control register 1B
DTCR1B
R/W
H'00
Note:
*
The lower 20 bits of the address are indicated.

188
7.2
Register Descriptions (1) (Short Address Mode)
In short address mode, transfers can be carried out independently on channels A and B. Short
address mode is selected by bits DTS2A and DTS1A in data transfer control register A (DTCRA)
as indicated in table 7.4.
Table 7.4
Selection of Short and Full Address Modes
Channel
Bit 2
DTS2A
Bit 1
DTS1A
Description
0
1
1
DMAC channel 0 operates as one channel in full address mode
Other than above
DMAC channels 0A and 0B operate as two independent channels
in short address mode
1
1
1
DMAC channel 1 operates as one channel in full address mode
Other than above
DMAC channels 1A and 1B operate as two independent channels
in short address mode
7.2.1
Memory Address Registers (MAR)
A memory address register (MAR) is a 32-bit readable/writable register that specifies a source or
destination address. The transfer direction is determined automatically from the activation source.
An MAR consists of four 8-bit registers designated MARR, MARE, MARH, and MARL. All bits
of MARR are reserved; they cannot be modified and are always read as 1.
Bit
Initial value
Read/Write
31
1
--
Source or destination address
30
1
--
29
1
--
28
1
--
27
1
--
26
1
--
25
1
--
24
1
--
23
R/W
22
R/W
21
R/W
20
R/W
19
R/W
18
R/W
17
R/W
16
R/W
15
R/W
14
R/W
13
R/W
12
R/W
11
Undetermined
R/W
10
R/W
9
R/W
8
R/W
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
2
R/W
1
R/W
0
R/W
MARR
MARE
MARH
MARL
An MAR functions as a source or destination address register depending on how the DMAC is
activated: as a destination address register if activation is by a receive-data-full interrupt from the
serial communication interface (SCI) (channel 0) or by a conversion-end interrupt from the A/D
converter, and as a source address register otherwise.
The MAR value is incremented or decremented each time one byte or word is transferred,
automatically updating the source or destination memory address. For details, see section 7.3.4,
Data Transfer Control Registers (DTCR).
The MARs are not initialized by a reset or in standby mode.
189
7.2.2
I/O Address Registers (IOAR)
An I/O address register (IOAR) is an 8-bit readable/writable register that specifies a source or
destination address. The IOAR value is the lower 8 bits of the address. The upper 16 address bits
are all 1 (H'FFFF).
Bit
Initial value
Read/Write
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
0
R/W
2
R/W
1
R/W
Source or destination address
Undetermined
An IOAR functions as a source or destination address register depending on how the DMAC is
activated: as a source address register if activation is by a receive-data-full interrupt from the SCI
(channel 0) or by a conversion-end interrupt from the A/D converter, and as a destination address
register otherwise.
The IOAR value is held fixed. It is not incremented or decremented when a transfer is executed.
The IOARs are not initialized by a reset or in standby mode.
7.2.3
Execute Transfer Count Registers (ETCR)
An execute transfer count register (ETCR) is a 16-bit readable/writable register that specifies the
number of transfers to be executed. These registers function in one way in I/O mode and idle
mode, and another way in repeat mode.
∑
I/O mode and idle mode
Bit
Initial value
Read/Write
14
R/W
12
R/W
10
R/W
8
R/W
6
R/W
0
R/W
4
R/W
2
R/W
Transfer counter
Undetermined
15
R/W
13
R/W
11
R/W
9
R/W
7
R/W
1
R/W
5
R/W
3
R/W
In I/O mode and idle mode, ETCR functions as a 16-bit counter. The count is decremented by
1 each time one transfer is executed. The transfer ends when the count reaches H'0000.

190
∑
Repeat mode
Bit
Initial value
Read/Write
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
0
R/W
2
R/W
1
R/W
Undetermined
Transfer counter
ETCRH
Bit
Initial value
Read/Write
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
0
R/W
2
R/W
1
R/W
Undetermined
Initial count
ETCRL
In repeat mode, ETCRH functions as an 8-bit transfer counter and ETCRL holds the initial transfer
count. ETCRH is decremented by 1 each time one transfer is executed. When ETCRH reaches
H'00, the value in ETCRL is reloaded into ETCRH and the same operation is repeated.
The ETCRs are not initialized by a reset or in standby mode.

191
7.2.4
Data Transfer Control Registers (DTCR)
A data transfer control register (DTCR) is an 8-bit readable/writable register that controls the
operation of one DMAC channel.
Bit
Initial value
Read/Write
7
DTE
0
R/W
6
DTSZ
0
R/W
5
DTID
0
R/W
4
RPE
0
R/W
3
DTIE
0
R/W
0
DTS0
0
R/W
2
DTS2
0
R/W
1
DTS1
0
R/W
Data transfer enable
Enables or disables
data transfer
Data transfer interrupt enable
Enables or disables the CPU interrupt
at the end of the transfer
Data transfer select
These bits select the data
transfer activation source
Data transfer size
Selects byte or
word size
Data transfer
increment/decrement
Selects whether to
increment or decrement
the memory address
register
Repeat enable
Selects repeat
mode
The DTCRs are initialized to H'00 by a reset and in standby mode.
Bit 7--Data Transfer Enable (DTE): Enables or disables data transfer on a channel. When the
DTE bit is set to 1, the channel waits for a transfer to be requested, and executes the transfer when
activated as specified by bits DTS2 to DTS0. When DTE is 0, the channel is disabled and does not
accept transfer requests. DTE is set to 1 by reading the register when DTE is 0, then writing 1.
Bit 7
DTE
Description
0
Data transfer is disabled. In I/O mode or idle mode, DTE is cleared to 0
(Initial value)
when the specified number of transfers have been completed
1
Data transfer is enabled
If DTIE is set to 1, a CPU interrupt is requested when DTE is cleared to 0.
192
Bit 6--Data Transfer Size (DTSZ): Selects the data size of each transfer.
Bit 6
DTSZ
Description
0
Byte-size transfer
(Initial value)
1
Word-size transfer
Bit 5--Data Transfer Increment/Decrement (DTID): Selects whether to increment or
decrement the memory address register (MAR) after a data transfer in I/O mode or repeat mode.
Bit 5
DTID
Description
0
MAR is incremented after each data transfer
∑
If DTSZ = 0, MAR is incremented by 1 after each transfer
∑
If DTSZ = 1, MAR is incremented by 2 after each transfer
1
MAR is decremented after each data transfer
∑
If DTSZ = 0, MAR is decremented by 1 after each transfer
∑
If DTSZ = 1, MAR is decremented by 2 after each transfer
MAR is not incremented or decremented in idle mode.
Bit 4--Repeat Enable (RPE): Selects whether to transfer data in I/O mode, idle mode, or repeat
mode.
Bit 4
RPE
Bit 3
DTIE
Description
0
0
I/O mode
(Initial value)
1
1
0
Repeat mode
1
Idle mode
Operations in these modes are described in sections 7.4.2, I/O Mode, 7.4.3, Idle Mode, and 7.4.4,
Repeat Mode.
193
Bit 3--Data Transfer Interrupt Enable (DTIE): Enables or disables the CPU interrupt (DEND)
requested when the DTE bit is cleared to 0.
Bit 3
DTIE
Description
0
The DEND interrupt requested by DTE is disabled
(Initial value)
1
The DEND interrupt requested by DTE is enabled
Bits 2 to 0--Data Transfer Select (DTS2, DTS1, DTS0): These bits select the data transfer
activation source. Some of the selectable sources differ between channels A and B.*
Note: * See section 7.3.4, Data Transfer Control Registers (DTCR).
Bit 2
DTS2
Bit 1
DTS1
Bit 0
DTS0
Description
0
0
0
Compare match/input capture A interrupt from 16-bit timer channel 0
(Initial value)
1
Compare match/input capture A interrupt from 16-bit timer channel 1
1
0
Compare match/input capture A interrupt from 16-bit timer channel 2
1
Conversion-end interrupt from A/D converter
1
0
0
Transmit-data-empty interrupt from SCI channel 0
1
Receive-data-full interrupt from SCI channel 0
1
0
Falling edge of
DREQ
input (channel B)
Transfer in full address mode (channel A)
1
Low level of
DREQ
input (channel B)
Transfer in full address mode (channel A)
The same internal interrupt can be selected as an activation source for two or more channels at
once. In that case the channels are activated in a priority order, highest-priority channel first. For
the priority order, see section 7.4.9, Multiple-Channel Operation.
When a channel is enabled (DTE = 1), its selected DMAC activation source cannot generate a
CPU interrupt.

194
7.3
Register Descriptions (2) (Full Address Mode)
In full address mode the A and B channels operate together. Full address mode is selected as
indicated in table 7.4.
7.3.1
Memory Address Registers (MAR)
A memory address register (MAR) is a 32-bit readable/writable register. MARA functions as the
source address register of the transfer, and MARB as the destination address register.
An MAR consists of four 8-bit registers designated MARR, MARE, MARH, and MARL. All bits
of MARR are reserved; they cannot be modified and are always read as 1. (Write is invalid.)
Bit
Initial value
Read/Write
31
1
--
Source or destination address
30
1
--
29
1
--
28
1
--
27
1
--
26
1
--
25
1
--
24
1
--
23
R/W
22
R/W
21
R/W
20
R/W
19
R/W
18
R/W
17
R/W
16
R/W
15
R/W
14
R/W
13
R/W
12
R/W
11
R/W
10
R/W
9
R/W
8
R/W
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
2
R/W
1
R/W
0
R/W
MARR
MARE
MARH
MARL
Undetermined
The MAR value is incremented or decremented each time one byte or word is transferred,
automatically updating the source or destination memory address. For details, see section 7.3.4,
Data Transfer Control Registers (DTCR).
The MARs are not initialized by a reset or in standby mode.
7.3.2
I/O Address Registers (IOAR)
The I/O address registers (IOARs) are not used in full address mode.
195
7.3.3
Execute Transfer Count Registers (ETCR)
An execute transfer count register (ETCR) is a 16-bit readable/writable register that specifies the
number of transfers to be executed. The functions of these registers differ between normal mode
and block transfer mode.
∑
Normal mode
ETCRA
Bit
Initial value
Read/Write
14
R/W
12
R/W
10
R/W
8
R/W
6
R/W
0
R/W
4
R/W
2
R/W
Transfer counter
Undetermined
15
R/W
13
R/W
11
R/W
9
R/W
7
R/W
1
R/W
5
R/W
3
R/W
ETCRB: Is not used in normal mode.
In normal mode ETCRA functions as a 16-bit transfer counter. The count is decremented by 1
each time one transfer is executed. The transfer ends when the count reaches H'0000. ETCRB is
not used.
196
∑
Block transfer mode
ETCRA
Bit
Initial value
Read/Write
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
0
R/W
2
R/W
1
R/W
Undetermined
Block size counter
ETCRAH
Bit
Initial value
Read/Write
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
0
R/W
2
R/W
1
R/W
Undetermined
Initial block size
ETCRAL
ETCRB
Bit
Initial value
Read/Write
14
R/W
12
R/W
10
R/W
8
R/W
6
R/W
0
R/W
4
R/W
2
R/W
Block transfer counter
Undetermined
15
R/W
13
R/W
11
R/W
9
R/W
7
R/W
1
R/W
5
R/W
3
R/W
In block transfer mode, ETCRAH functions as an 8-bit block size counter. ETCRAL holds the
initial block size. ETCRAH is decremented by 1 each time one byte or word is transferred. When
the count reaches H'00, ETCRAH is reloaded from ETCRAL. Blocks consisting of an arbitrary
number of bytes or words can be transferred repeatedly by setting the same initial block size value
in ETCRAH and ETCRAL.
In block transfer mode ETCRB functions as a 16-bit block transfer counter. ETCRB is
decremented by 1 each time one block is transferred. The transfer ends when the count reaches
H'0000.
The ETCRs are not initialized by a reset or in standby mode.
197
7.3.4
Data Transfer Control Registers (DTCR)
The data transfer control registers (DTCRs) are 8-bit readable/writable registers that control the
operation of the DMAC channels. A channel operates in full address mode when bits DTS2A and
DTS1A are both set to 1 in DTCRA. DTCRA and DTCRB have different functions in full address
mode.
DTCRA
Bit
Initial value
Read/Write
7
DTE
0
R/W
6
DTSZ
0
R/W
5
SAID
0
R/W
4
SAIDE
0
R/W
3
DTIE
0
R/W
0
DTS0A
0
R/W
2
DTS2A
0
R/W
1
DTS1A
0
R/W
Data transfer enable
Enables or disables
data transfer
Enables or disables the
CPU interrupt at the end
of the transfer
Data transfer size
Selects byte or
word size
Source address
increment/decrement
Data transfer select
2A and 1A
These bits must both be
set to 1
Data transfer
interrupt enable
Source address increment/
decrement enable
These bits select whether
the source address register
(MARA) is incremented,
decremented, or held fixed
during the data transfer
Selects block
transfer mode
Data transfer
select 0A
DTCRA is initialized to H'00 by a reset and in standby mode.

198
Bit 7--Data Transfer Enable (DTE): Together with the DTME bit in DTCRB, this bit enables
or disables data transfer on the channel. When the DTME and DTE bits are both set to 1, the
channel is enabled. If auto-request is specified, data transfer begins immediately. Otherwise, the
channel waits for transfers to be requested. When the specified number of transfers have been
completed, the DTE bit is automatically cleared to 0. When DTE is 0, the channel is disabled and
does not accept transfer requests. DTE is set to 1 by reading the register when DTE is 0, then
writing 1.
Bit 7
DTE
Description
0
Data transfer is disabled (DTE is cleared to 0 when the specified number (Initial value)
of transfers have been completed)
1
Data transfer is enabled
If DTIE is set to 1, a CPU interrupt is requested when DTE is cleared to 0.
Bit 6--Data Transfer Size (DTSZ): Selects the data size of each transfer.
Bit 6
DTSZ
Description
0
Byte-size transfer
(Initial value)
1
Word-size transfer
Bit 5--Source Address Increment/Decrement (SAID) and,
Bit 4--Source Address Increment/Decrement Enable (SAIDE): These bits select whether the
source address register (MARA) is incremented, decremented, or held fixed during the data
transfer.
Bit 5
SAID
Bit 4
SAIDE
Description
0
0
MARA is held fixed
(Initial value)
1
MARA is incremented after each data transfer
∑
If DTSZ = 0, MARA is incremented by 1 after each transfer
∑
If DTSZ = 1, MARA is incremented by 2 after each transfer
1
0
MARA is held fixed
1
MARA is decremented after each data transfer
∑
If DTSZ = 0, MARA is decremented by 1 after each transfer
∑
If DTSZ = 1, MARA is decremented by 2 after each transfer

199
Bit 3--Data Transfer Interrupt Enable (DTIE): Enables or disables the CPU interrupt (DEND)
requested when the DTE bit is cleared to 0.
Bit 3
DTIE
Description
0
The DEND interrupt requested by DTE is disabled
(Initial value)
1
The DEND interrupt requested by DTE is enabled
Bits 2 and 1--Data Transfer Select 2A and 1A (DTS2A, DTS1A): A channel operates in full
address mode when DTS2A and DTS1A are both set to 1.
Bit 0--Data Transfer Select 0A (DTS0A): Selects normal mode or block transfer mode.
Bit 0
DTS0A
Description
0
Normal mode
(Initial value)
1
Block transfer mode
Operations in these modes are described in sections 7.4.5, Normal Mode, and 7.4.6, Block
Transfer Mode.
200
DTCRB
Bit
Initial value
Read/Write
7
DTME
0
R/W
6
--
0
R/W
5
DAID
0
R/W
4
DAIDE
0
R/W
3
TMS
0
R/W
0
DTS0B
0
R/W
2
DTS2B
0
R/W
1
DTS1B
0
R/W
Data transfer master enable
Enables or disables data
transfer, together with
the DTE bit, and is cleared
to 0 by an interrupt
Reserved bit
Destination address
increment/decrement
Data transfer select
2B to 0B
These bits select the data
transfer activation source
Transfer mode select
Destination address
increment/decrement enable
These bits select whether
the destination address
register (MARB) is incremented,
decremented, or held fixed
during the data transfer
Selects whether the
block area is the source
or destination in block
transfer mode
DTCRB is initialized to H'00 by a reset and in standby mode.
Bit 7--Data Transfer Master Enable (DTME): Together with the DTE bit in DTCRA, this bit
enables or disables data transfer. When the DTME and DTE bits are both set to 1, the channel is
enabled. When an NMI interrupt occurs DTME is cleared to 0, suspending the transfer so that the
CPU can use the bus. The suspended transfer resumes when DTME is set to 1 again. For further
information on operation in block transfer mode, see section 7.6.6, NMI Interrupts and Block
Transfer Mode.
DTME is set to 1 by reading the register while DTME = 0, then writing 1.
Bit 7
DTME
Description
0
Data transfer is disabled (DTME is cleared to 0 when an NMI interrupt
(Initial value)
occurs)
1
Data transfer is enabled
201
Bit 6--Reserved: Although reserved, this bit can be written and read.
Bit 5--Destination Address Increment/Decrement (DAID) and,
Bit 4--Destination Address Increment/Decrement Enable (DAIDE): These bits select whether
the destination address register (MARB) is incremented, decremented, or held fixed during the
data transfer.
Bit 5
DAID
Bit 4
DAIDE
Description
0
0
MARB is held fixed
(Initial value)
1
MARB is incremented after each data transfer
∑
If DTSZ = 0, MARB is incremented by 1 after each data transfer
∑
If DTSZ = 1, MARB is incremented by 2 after each data transfer
1
0
MARB is held fixed
1
MARB is decremented after each data transfer
∑
If DTSZ = 0, MARB is decremented by 1 after each data transfer
∑
If DTSZ = 1, MARB is decremented by 2 after each data transfer
Bit 3--Transfer Mode Select (TMS): Selects whether the source or destination is the block area
in block transfer mode.
Bit 3
TMS
Description
0
Destination is the block area in block transfer mode
(Initial value)
1
Source is the block area in block transfer mode
202
Bits 2 to 0--Data Transfer Select 2B to 0B (DTS2B, DTS1B, DTS0B): These bits select the
data transfer activation source. The selectable activation sources differ between normal mode and
block transfer mode.
Normal mode
Bit 2
DTS2B
Bit 1
DTS1B
Bit 0
DTS0B
Description
0
0
0
Auto-request (burst mode)
(Initial value)
1
Cannot be used
1
0
Auto-request (cycle-steal mode)
1
Cannot be used
1
0
0
Cannot be used
1
Cannot be used
1
0
Falling edge of
DREQ
1
Low level input at
DREQ
Block transfer mode
Bit 2
DTS2B
Bit 1
DTS1B
Bit 0
DTS0B Description
0
0
0
Compare match/input capture A interrupt from 16-bit timer channel 0
(Initial value)
1
Compare match/input capture A interrupt from 16-bit timer channel 1
1
0
Compare match/input capture A interrupt from 16-bit timer channel 2
1
Conversion-end interrupt from A/D converter
1
0
0
Cannot be used
1
Cannot be used
1
0
Falling edge of
DREQ
1
Cannot be used
The same internal interrupt can be selected to activate two or more channels. The channels are
activated in a priority order, highest priority first. For the priority order, see section 7.4.9,
Multiple-Channel Operation.

203
7.4
Operation
7.4.1
Overview
Table 7.5 summarizes the DMAC modes.
Table 7.5
DMAC Modes
Transfer Mode
Activation
Notes
Short address
mode
I/O mode
Idle mode
Repeat mode
Compare match/input
capture A interrupt from
16-bit timer channels 0 to 2
∑
Up to four channels
can operate
independently
Transmit-data-empty
and receive-data-full
interrupts from SCI
channel 0
∑
Only the B channels
support external requests
Conversion-end interrupt
from A/D converter
External request
Full address
mode
Normal mode
Auto-request
∑
A and B channels are
paired; up to two
channels are available
External request
Block transfer mode
Compare match/input
capture A interrupt from
ITU channels 0 to 2
∑
Burst mode transfer or
cycle-steal mode transfer
can be selected for
autorequests.
Conversion-end interrupt
from A/D converter
External request
A summary of operations in these modes follows.
I/O Mode: One byte or word is transferred per request. A designated number of these transfers are
executed. A CPU interrupt can be requested at completion of the designated number of transfers.
One 24-bit address and one 8-bit address are specified. The transfer direction is determined
automatically from the activation source.
Idle Mode: One byte or word is transferred per request. A designated number of these transfers
are executed. A CPU interrupt can be requested at completion of the designated number of
transfers. One 24-bit address and one 8-bit address are specified. The addresses are held fixed. The
transfer direction is determined automatically from the activation source.

204
Repeat Mode: One byte or word is transferred per request. A designated number of these transfers
are executed. When the designated number of transfers are completed, the initial address and
counter value are restored and operation continues. No CPU interrupt is requested. One 24-bit
address and one 8-bit address are specified. The transfer direction is determined automatically
from the activation source.
Normal Mode
∑
Auto-request
The DMAC is activated by register setup alone, and continues executing transfers until the
designated number of transfers have been completed. A CPU interrupt can be requested at
completion of the transfers. Both addresses are 24-bit addresses.
Cycle-steal mode
The bus is released to another bus master after each byte or word is transferred.
Burst mode
Unless requested by a higher-priority bus master, the bus is not released until the
designated number of transfers have been completed.
∑
External request
One byte or word is transferred per request. A designated number of these transfers are
executed. A CPU interrupt can be requested at completion of the designated number of
transfers. Both addresses are 24-bit addresses.
Block Transfer Mode: One block of a specified size is transferred per request. A designated
number of block transfers are executed. At the end of each block transfer, one address is restored
to its initial value. When the designated number of blocks have been transferred, a CPU interrupt
can be requested. Both addresses are 24-bit addresses.

205
7.4.2
I/O Mode
I/O mode can be selected independently for each channel.
One byte or word is transferred at each transfer request in I/O mode. A designated number of these
transfers are executed. One address is specified in the memory address register (MAR), the other
in the I/O address register (IOAR). The direction of transfer is determined automatically from the
activation source. The transfer is from the address specified in IOAR to the address specified in
MAR if activated by an SCI channel 0 receive-data-full interrupt or an A/D converter conversion
end interrupt, and from the address specified in MAR to the address specified in IOAR otherwise.
Table 7.6 indicates the register functions in I/O mode.
Table 7.6
Register Functions in I/O Mode
Function
Register
Activated by
SCI0 Receive-
Data-Full
Interrupt or
A/D Converter
Conversion
End Interrupt
Other
Activation
Initial Setting
Operation
23
0
MAR
Destination
address
register
Source
address
register
Destination or
source address
Incremented or
decremented
once per
transfer
All 1s
IOAR
23
0
7
Source
address
register
Destination
address
register
Source or
destination
address
Held fixed
15
0
ETCR
Transfer counter
Number of
transfers
Decremented
once per
transfer until
H'0000 is
reached and
transfer ends
Legend
MAR:
Memory address register
IOAR: I/O address register
ETCR: Execute transfer count register
MAR and IOAR specify the source and destination addresses. MAR specifies a 24-bit source or
destination address, which is incremented or decremented as each byte or word is transferred.
IOAR specifies the lower 8 bits of a fixed address. The upper 16 bits are all 1s. IOAR is not
incremented or decremented.
206
Figure 7.2 illustrates how I/O mode operates.
Address T
Address B
Transfer
Legend
L = initial setting of MAR
N = initial setting of ETCR
Address T = L
Address B = L + (≠1) ∑ (2 ∑ N ≠ 1)
DTID
IOAR
1 byte or word is
transferred per request
DTSZ
Figure 7.2 Operation in I/O Mode
The transfer count is specified as a 16-bit value in ETCR. The ETCR value is decremented by 1 at
each transfer. When the ETCR value reaches H'0000, the DTE bit is cleared and the transfer ends.
If the DTIE bit is set to 1, a CPU interrupt is requested at this time. The maximum transfer count is
65,536, obtained by setting ETCR to H'0000.
Transfers can be requested (activated) by compare match/input capture A interrupts from 16-bit
timer channels 0 to 2, transmit-data-empty and receive-data-full interrupts from SCI channel 0,
conversion-end interrupts from the A/D converter, and external request signals.
For the detailed settings see section 7.2.4, Data Transfer Control Registers (DTCR).
207
Figure 7.3 shows a sample setup procedure for I/O mode.
Set source and
destination addresses
Set transfer count
Read DTCR
Set DTCR
I/O mode
I/O mode setup
1
2
3
4
1.
2.
3.
4.
Set the source and destination addresses
in MAR and IOAR. The transfer direction is
determined automatically from the activation
source.
Set the transfer count in ETCR.
Read DTCR while the DTE bit is cleared to 0.
Set the DTCR bits as follows.
Select the DMAC activation source with bits
DTS2 to DTS0.
Set or clear the DTIE bit to enable or disable
the CPU interrupt at the end of the transfer.
Clear the RPE bit to 0 to select I/O mode.
Select MAR increment or decrement with the
DTID bit.
Select byte size or word size with the DTSZ bit.
Set the DTE bit to 1 to enable the transfer.
∑
∑
∑
∑
∑
∑
Figure 7.3 I/O Mode Setup Procedure (Example)
7.4.3
Idle Mode
Idle mode can be selected independently for each channel.
One byte or word is transferred at each transfer request in idle mode. A designated number of
these transfers are executed. One address is specified in the memory address register (MAR), the
other in the I/O address register (IOAR). The direction of transfer is determined automatically
from the activation source. The transfer is from the address specified in IOAR to the address
specified in MAR if activated by an SCI channel 0 receive-data-full interrupt or an A/D converter
conversion end interrupt, and from the address specified in MAR to the address specified in IOAR
otherwise.
Table 7.7 indicates the register functions in idle mode.
208
Table 7.7 Register Functions in Idle Mode
Function
Register
Activated by
SCI0 Receive-
Data-Full
Interrupt or
A/D Converter
Conversion
End Interrupt
Other
Activation
Initial Setting
Operation
23
0
MAR
Destination
address
register
Source
address
register
Destination or
source address
Held fixed
All 1s
IOAR
23
0
7
Source
address
register
Destination
address
register
Source or
destination
address
Held fixed
15
0
ETCR
Transfer counter
Number of
transfers
Decremented
once per
transfer until
H'0000 is
reached and
transfer ends
Legend
MAR:
Memory address register
IOAR: I/O address register
ETCR: Execute transfer count register
MAR and IOAR specify the source and destination addresses. MAR specifies a 24-bit source or
destination address. IOAR specifies the lower 8 bits of a fixed address. The upper 16 bits are all
1s. MAR and IOAR are not incremented or decremented.
Figure 7.4 illustrates how idle mode operates.
Transfer
1 byte or word is
transferred per request
IOAR
MAR
Figure 7.4 Operation in Idle Mode
209
The transfer count is specified as a 16-bit value in ETCR. The ETCR value is decremented by 1 at
each transfer. When the ETCR value reaches H'0000, the DTE bit is cleared, the transfer ends, and
a CPU interrupt is requested. The maximum transfer count is 65,536, obtained by setting ETCR to
H'0000.
Transfers can be requested (activated) by compare match/input capture A interrupts from 16-bit
timer channels 0 to 2, transmit-data-empty and receive-data-full interrupts from SCI channel 0,
conversion-end interrupts from the A/D converter, and external request signals.
For the detailed settings see section 7.3.4, Data Transfer Control Registers (DTCR).
Figure 7.5 shows a sample setup procedure for idle mode.
Set source and
destination addresses
Set transfer count
Read DTCR
Set DTCR
Idle mode
Idle mode setup
1
2
3
4
1.
2.
3.
4.
Set the source and destination addresses
in MAR and IOAR. The transfer direction is deter-
mined automatically from the activation source.
Set the transfer count in ETCR.
Read DTCR while the DTE bit is cleared to 0.
Set the DTCR bits as follows.
Select the DMAC activation source with bits
DTS2 to DTS0.
Set the DTIE and RPE bits to 1 to select idle mode.
Select byte size or word size with the DTSZ bit.
Set the DTE bit to 1 to enable the transfer.
∑
∑
∑
∑
Figure 7.5 Idle Mode Setup Procedure (Example)

210
7.4.4
Repeat Mode
Repeat mode is useful for cyclically transferring a bit pattern from a table to the programmable
timing pattern controller (TPC) in synchronization, for example, with 16-bit timer compare match.
Repeat mode can be selected for each channel independently.
One byte or word is transferred per request in repeat mode, as in I/O mode. A designated number
of these transfers are executed. One address is specified in the memory address register (MAR),
the other in the I/O address register (IOAR). At the end of the designated number of transfers,
MAR and ETCRH are restored to their original values and operation continues. The direction of
transfer is determined automatically from the activation source. The transfer is from the address
specified in IOAR to the address specified in MAR if activated by an SCI channel 0 receive-data-
full interrupt or an A/D converter conversion end interrupt, and from the address specified in
MAR to the address specified in IOAR otherwise.
Table 7.8 indicates the register functions in repeat mode.

211
Table 7.8
Register Functions in Repeat Mode
Function
Register
Activated by
SCI0 Receive-
Data-Full
Interrupt or
A/D Converter
Conversion
End Interrupt
Other
Activation Initial Setting
Operation
Destination
address
register
Source
address
register
Transfer
destination or
transfer source
start address
Incremented or
decremented at
each transfer until
ETCRH reaches
H'0000, then restored
to initial value
Source
address
register
Destination
address
register
Source or
destination
address
Held fixed
Transfer counter
Number of
transfers
Decremented once
per transfer until
H'0000 is reached,
then reloaded from
ETCRL
Initial transfer count
Number of
transfers
Held fixed
Legend
MAR:
Memory address register
IOAR: I/O address register
ETCR: Execute transfer count register
23
0
MAR
All 1s
IOAR
23
0
7
0
ETCRH
7
7
0
ETCRL
In repeat mode ETCRH is used as the transfer counter while ETCRL holds the initial transfer
count. ETCRH is decremented by 1 at each transfer until it reaches H'00, then is reloaded from
ETCRL. MAR is also restored to its initial value, which is calculated from the DTSZ and DTID
bits in DTCR. Specifically, MAR is restored as follows:
MAR
MAR ≠ (≠1)
DTID
∑ 2
DTSZ
∑ ETCRL
ETCRH and ETCRL should be initially set to the same value.
In repeat mode transfers continue until the CPU clears the DTE bit to 0. After DTE is cleared to 0,
if the CPU sets DTE to 1 again, transfers resume from the state at which DTE was cleared. No
CPU interrupt is requested.
212
As in I/O mode, MAR and IOAR specify the source and destination addresses. MAR specifies a
24-bit source or destination address. IOAR specifies the lower 8 bits of a fixed address. The upper
16 bits are all 1s. IOAR is not incremented or decremented.
Figure 7.6 illustrates how repeat mode operates.
Address T
Address B
Transfer
1 byte or word is
transferred per request
Legend
L = initial setting of MAR
N = initial setting of ETCRH and ETCRL
Address T = L
Address B = L + (≠1) ∑ (2 ∑ N ≠ 1)
DTID
DTSZ
IOAR
Figure 7.6 Operation in Repeat Mode
The transfer count is specified as an 8-bit value in ETCRH and ETCRL. The maximum transfer
count is 255, obtained by setting both ETCRH and ETCRL to H'FF.
Transfers can be requested (activated) by compare match/input capture A interrupts from 16-bit
timer channels 0 to 2, transmit-data-empty and receive-data-full interrupts from SCI channel 0,
conversion-end interrupts from the A/D converter, and external request signals.
For the detailed settings see section 7.2.4, Data Transfer Control Registers (DTCR).
Figure 7.7 shows a sample setup procedure for repeat mode.
213
Set source and
destination addresses
Set transfer count
Read DTCR
Set DTCR
Repeat mode
Repeat mode
1
2
3
4
1.
2.
3.
4.
Set the source and destination addresses in MAR
and IOAR. The transfer direction is determined
automatically from the activation source.
Set the transfer count in both ETCRH and ETCRL.
Read DTCR while the DTE bit is cleared to 0.
Select byte size or word size with the DTSZ bit.
Set the DTE bit to 1 to enable the transfer.
∑
∑
∑
∑
∑
Select the DMAC activation source with bits
DTS2 to DTS0.
Clear the DTIE bit to 0 and set the RPE bit to 1
to select repeat mode.
Select MAR increment or decrement with the DTID bit.
Set the DTCR bits as follows.
Figure 7.7 Repeat Mode Setup Procedure (Example)

214
7.4.5
Normal Mode
In normal mode, the A and B channels are combined. One byte or word is transferred per request.
A designated number of these transfers are executed. Addresses are specified in MARA and
MARB. Table 7.9 indicates the register functions in I/O mode.
Table 7.9
Register Functions in Normal Mode
Register
Function
Initial Setting
Operation
23
0
MARA
Source address
register
Transfer source
start address
Incremented or
decremented once per
transfer, or held fixed
23
0
MARB
Destination
address register
Transfer destination
start address
Incremented or
decremented once per
transfer, or held fixed
15
0
ETCRA
Transfer counter
Number of
transfers
Decremented once per
transfer
Legend
MARA: Memory address register A
MARB: Memory address register B
ETCRA: Execute transfer count register A
The source and destination addresses are both 24-bit addresses. MARA specifies the source
address. MARB specifies the destination address. MARA and MARB can be independently
incremented, decremented, or held fixed as data is transferred.
The transfer count is specified as a 16-bit value in ETCRA. The ETCRA value is decremented by
1 at each transfer. When the ETCRA value reaches H'0000, the DTE bit is cleared and the transfer
ends. If the DTIE bit is set to 1, a CPU interrupt is requested at this time. The maximum transfer
count is 65,536, obtained by setting ETCRA to H'0000.
215
Figure 7.8 illustrates how normal mode operates.
Address T
Address B
Transfer
Legend
L
L
N
T
B
T
B
SAID
DAID
Address T
Address B
A
B
A
A
B
B
= initial setting of MARA
= initial setting of MARB
= initial setting of ETCRA
= L
= L + SAIDE ∑ (≠1) ∑ (2 ∑ N ≠ 1)
= L
= L + DAIDE ∑ (≠1) ∑ (2 ∑ N ≠ 1)
A
A
B
B
DTSZ
DTSZ
A
A
B
B
Figure 7.8 Operation in Normal Mode
Transfers can be requested (activated) by an external request or auto-request. An auto-requested
transfer is activated by the register settings alone. The designated number of transfers are executed
automatically. Either cycle-steal or burst mode can be selected. In cycle-steal mode, the DMAC
releases the bus temporarily after each transfer. In burst mode, the DMAC keeps the bus until the
transfers are completed, unless there is a bus request from a higher-priority bus master.
For the detailed settings see section 7.3.4, Data Transfer Control Registers (DTCR).
216
Figure 7.9 shows a sample setup procedure for normal mode.
1.
2.
3.
4.
5.
6.
7.
8.
9.
Set the initial source address in MARA.
Set the initial destination address in MARB.
Set the transfer count in ETCRA.
Set the DTCRB bits as follows.
Set the DTCRA bits as follows.
Read DTCRB with DTME cleared to 0.
Normal mode
Normal mode
Set initial source address
Set initial destination address
Set transfer count
Set DTCRB (1)
Set DTCRA (1)
Read DTCRB
Set DTCRB (2)
Read DTCRA
Set DTCRA (2)
1
2
3
4
5
6
7
8
9
∑
∑
∑
∑
∑
∑
∑
∑
Clear the DTME bit to 0.
Set the DAID and DAIDE bits to select whether
MARB is incremented, decremented, or held fixed.
Select the DMAC activation source with bits
DTS2B to DTS0B.
Clear the DTE bit to 0.
Select byte or word size with the DTSZ bit.
Set the SAID and SAIDE bits to select whether
MARA is incremented, decremented, or held fixed.
Set or clear the DTIE bit to enable or disable the
CPU interrupt at the end of the transfer.
Clear the DTS0A bit to 0 and set the DTS2A
and DTS1A bits to 1 to select normal mode.
Set the DTME bit to 1 in DTCRB.
Read DTCRA with DTE cleared to 0.
Set the DTE bit to 1 in DTCRA to enable the transfer.
Note: Carry out settings 1 to 9 with the DEND interrupt masked in the CPU.
If an NMI interrupt occurs during the setup procedure, it may clear the DTME bit to 0, in
which case the transfer will not start.
Figure 7.9 Normal Mode Setup Procedure (Example)
217
7.4.6
Block Transfer Mode
In block transfer mode, the A and B channels are combined. One block of a specified size is
transferred per request. A designated number of block transfers are executed. Addresses are
specified in MARA and MARB. The block area address can be either held fixed or cycled.
Table 7.10 indicates the register functions in block transfer mode.
Table 7.10
Register Functions in Block Transfer Mode
Register
Function
Initial Setting
Operation
Source address
register
Transfer source
start address
Incremented or
decremented once per
transfer, or held fixed
Destination
address register
Transfer destination
start address
Incremented or
decremented once per
transfer, or held fixed
Block size counter
Block size
Decremented once per
transfer until H'00 is
reached, then reloaded
from ETCRL
Initial block size
Block size
Held fixed
Block transfer
counter
Number of block
transfers
Decremented once per
block transfer until H'0000
is reached and the
transfer ends
Legend
MARA: Memory address register A
MARB: Memory address register B
ETCRA:
Execute transfer count register A
ETCRB:
Execute transfer count register B
23
0
MARA
7
0
ETCRAH
7
0
ETCRAL
23
0
MARB
15
0
ETCRB
The source and destination addresses are both 24-bit addresses. MARA specifies the source
address. MARB specifies the destination address. MARA and MARB can be independently
incremented, decremented, or held fixed as data is transferred. One of these registers operates as a
block area register: even if it is incremented or decremented, it is restored to its initial value at the
end of each block transfer. The TMS bit in DTCRB selects whether the block area is the source or
destination.

218
If M (1 to 255) is the size of the block transferred at each request and N (1 to 65,536) is the
number of blocks to be transferred, then ETCRAH and ETCRAL should initially be set to M and
ETCRB should initially be set to N.
Figure 7.10 illustrates how block transfer mode operates. In this figure, bit TMS is cleared to 0,
meaning the block area is the destination.
T
B
Transfer
Legend
L
L
M
N
T
B
T
B
Address T
M bytes or words are
transferred per request
Address B
A
A
Block 1
Block N
B
B
Block area
Block 2
= initial setting of MARA
= initial setting of MARB
= initial setting of ETCRAH and ETCRAL
= initial setting of ETCRB
= L
= L + SAIDE ∑ (≠1) ∑ (2 ∑ M ≠ 1)
= L
= L + DAIDE ∑ (≠1) ∑ (2 ∑ M ≠ 1)
A
A
B
B
A
B
A
A
B
B
SAID
DAID
DTSZ
DTSZ
Figure 7.10 Operation in Block Transfer Mode

219
When activated by a transfer request, the DMAC executes a burst transfer. During the transfer
MARA and MARB are updated according to the DTCR settings, and ETCRAH is decremented.
When ETCRAH reaches H'00, it is reloaded from ETCRAL to restore the initial value. The
memory address register of the block area is also restored to its initial value, and ETCRB is
decremented. If ETCRB is not H'0000, the DMAC then waits for the next transfer request.
ETCRAH and ETCRAL should be initially set to the same value.
The above operation is repeated until ETCRB reaches H'0000, at which point the DTE bit is
cleared to 0 and the transfer ends. If the DTIE bit is set to 1, a CPU interrupt is requested at this
time.
Figure 7.11 shows examples of a block transfer with byte data size when the block area is the
destination. In (a), the block area address is cycled. In (b), the block area address is held fixed.
Transfers can be requested (activated) by compare match/input capture A interrupts from 16-bit
timer channels 0 to 2, by a conversion-end interrupt from the A/D converter, and by external
request signals.
For the detailed settings see section 7.3.4, Data Transfer Control Registers (DTCR).
220
Start
(DTE = DTME = 1)
Transfer requested?
Get bus
MARA = MARA + 1
Read from MARA address
Write to MARB address
MARB = MARB + 1
ETCRAH = ETCRAH ≠ 1
ETCRAH = H'00
Release bus
Clear DTE to 0 and end transfer
ETCRAH = ETCRAL
MARB = MARB ≠ ETCRAL
ETCRB = ETCRB ≠ 1
ETCRB = H'0000
Start
(DTE = DTME = 1)
Transfer requested?
Get bus
MARA = MARA + 1
Read from MARA address
Write to MARB address
ETCRAH = ETCRAH ≠ 1
ETCRAH = H'00
Release bus
Clear DTE to 0 and end transfer
ETCRB = ETCRB ≠ 1
ETCRB = H'0000
ETCRAH = ETCRAL
No
No
No
Yes
Yes
Yes
No
No
No
Yes
Yes
Yes
a. DTSZ = TMS = 0
SAID = DAID = 0
SAIDE = DAIDE = 1
b. DTSZ = TMS = 0
SAID = 0
SAIDE = 1
DAIDE = 0
Figure 7.11 Block Transfer Mode Flowcharts
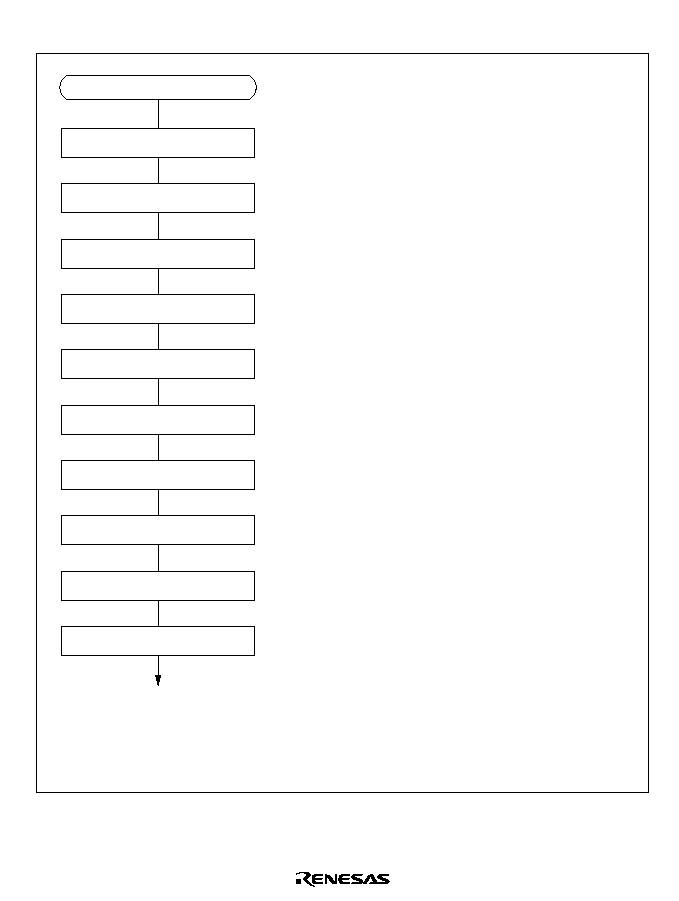
221
Figure 7.12 shows a sample setup procedure for block transfer mode.
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
Block transfer mode
1
2
3
4
5
6
7
8
9
10
Set source address
Set destination address
Set block transfer count
Set block size
Set DTCRB (1)
Set DTCRA (1)
Read DTCRB
Set DTCRB (2)
Read DTCRA
Set DTCRA (2)
Block transfer mode
Set the source address in MARA.
Set the destination address in MARB.
Set the block transfer count in ETCRB.
Set the block size (number of bytes or words)
in both ETCRAH and ETCRAL.
Set the DTCRB bits as follows.
Set the DTCRA bits as follows.
∑
∑
∑
∑
∑
∑
∑
∑
∑
Clear the DTME bit to 0.
Set the DAID and DAIDE bits to select whether
MARB is incremented, decremented, or held fixed.
Set or clear the TMS bit to make the block area
the source or destination.
Select the DMAC activation source with bits
DTS2B to DTS0B.
Clear the DTE to 0.
Select byte size or word size with the DTSZ bit.
Set the SAID and SAIDE bits to select whether
MARA is incremented, decremented, or held fixed.
Set or clear the DTIE bit to enable or disable the
CPU interrupt at the end of the transfer.
Set bits DTS2A to DTS0A all to 1 to select
block transfer mode.
Read DTCRB with DTME cleared to 0.
Set the DTME bit to 1 in DTCRB.
Read DTCRA with DTE cleared to 0.
Set the DTE bit to 1 in DTCRA to enable
the transfer.
Note: Carry out settings 1 to 10 with the DEND interrupt masked in the CPU.
If an NMI interrupt occurs during the setup procedure, it may clear the DTME bit to 0, in
which case the transfer will not start.
Figure 7.12 Block Transfer Mode Setup Procedure (Example)
222
7.4.7
DMAC Activation
The DMAC can be activated by an internal interrupt, external request, or auto-request. The
available activation sources differ depending on the transfer mode and channel as indicated in
table 7.11.
Table 7.11
DMAC Activation Sources
Short Address Mode
Channels
Channels
Full Address Mode
Activation Source
0A and 1A
0B and 1B
Normal
Block
Internal
IMIA0
Yes
Yes
No
Yes
interrupts
IMIA1
Yes
Yes
No
Yes
IMIA2
Yes
Yes
No
Yes
ADI
Yes
Yes
No
Yes
TXI0
Yes
Yes
No
No
RXI0
Yes
Yes
No
No
External
requests
Falling edge
of
DREQ
No
Yes
Yes
Yes
Low input at
DREQ
No
Yes
Yes
No
Auto-request
No
No
Yes
No
Activation by Internal Interrupts: When an interrupt request is selected as a DMAC activation
source and the DTE bit is set to 1, that interrupt request is not sent to the CPU. It is not possible
for an interrupt request to activate the DMAC and simultaneously generate a CPU interrupt.
When the DMAC is activated by an interrupt request, the interrupt request flag is cleared
automatically. If the same interrupt is selected to activate two or more channels, the interrupt
request flag is cleared when the highest-priority channel is activated, but the transfer request is
held pending on the other channels in the DMAC, which are activated in their priority order.

223
Activation by External Request: If an external request (
DREQ pin) is selected as an activation
source, the
DREQ pin becomes an input pin and the corresponding TEND pin becomes an output
pin, regardless of the port data direction register (DDR) settings. The
DREQ input can be level-
sensitive or edge-sensitive.
In short address mode and normal mode, an external request operates as follows. If edge sensing is
selected, one byte or word is transferred each time a high-to-low transition of the
DREQ input is
detected. If the next edge is input before the transfer is completed, the next transfer may not be
executed. If level sensing is selected, the transfer continues while
DREQ is low, until the transfer
is completed. The bus is released temporarily after each byte or word has been transferred,
however. If the
DREQ input goes high during a transfer, the transfer is suspended after the current
byte or word has been transferred. When
DREQ goes low, the request is held internally until one
byte or word has been transferred. The
TEND signal goes low during the last write cycle.
In block transfer mode, an external request operates as follows. Only edge-sensitive transfer
requests are possible in block transfer mode. Each time a high-to-low transition of the
DREQ
input is detected, a block of the specified size is transferred. The
TEND signal goes low during the
last write cycle in each block.
Activation by Auto-Request: The transfer starts as soon as enabled by register setup, and
continues until completed. Cycle-steal mode or burst mode can be selected.
In cycle-steal mode, the DMAC releases the bus temporarily after transferring each byte or word.
Normally, DMAC cycles alternate with CPU cycles.
In burst mode, the DMAC keeps the bus until the transfer is completed, unless there is a higher-
priority bus request. If there is a higher-priority bus request, the bus is released after the current
byte or word has been transferred.

224
7.4.8
DMAC Bus Cycle
Figure 7.13 shows an example of the timing of the basic DMAC bus cycle. This example shows a
word-size transfer from a 16-bit two-state access area to an 8-bit three-state access area. When the
DMAC gets the bus from the CPU, after one dead cycle (T
d
), it reads from the source address and
writes to the destination address. During these read and write operations the bus is not released
even if there is another bus request. DMAC cycles comply with bus controller settings in the same
way as CPU cycles.
RD
HWR
LWR
T
1
T
2
T
1
T
2
T
d
T
1
T
2
T
1
T
2
T
3
T
1
T
2
T
3
T
1
T
2
T
1
T
2
CPU cycle
DMAC cycle (1 word transfer)
CPU cycle
Source
address
Destination address
Address
bus
Figure 7.13 DMA Transfer Bus Timing (Example)
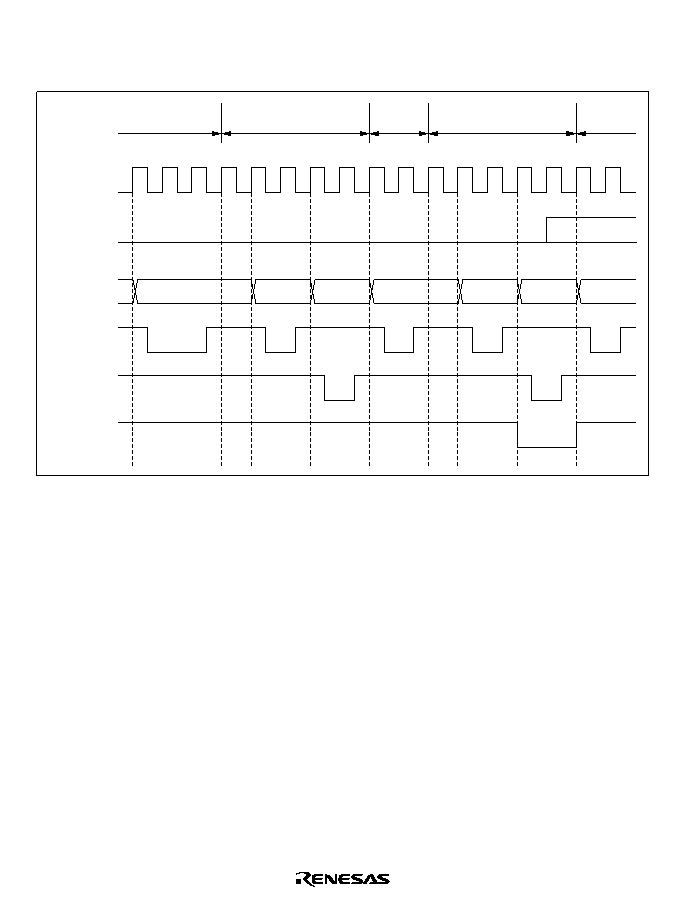
225
Figure 7.14 shows the timing when the DMAC is activated by low input at a
DREQ pin. This
example shows a word-size transfer from a 16-bit two-state access area to another 16-bit two-state
access area. The DMAC continues the transfer while the
DREQ pin is held low.
DREQ
RD
HWR
TEND
T
1
T
2
T
3
T
d
T
1
T
2
T
1
T
2
T
1
T
2
T
d
T
1
T
2
T
1
T
2
T
1
T
2
LWR
,
CPU cycle
DMAC cycle
CPU cycle
DMAC cycle
(last transfer cycle)
CPU cycle
Source
address
Destination
address
Source
address
Destination
address
Address
bus
Figure 7.14 Bus Timing of DMA Transfer Requested by Low
DREQ Input

226
Figure 7.15 shows an auto-requested burst-mode transfer. This example shows a transfer of three
words from a 16-bit two-state access area to another 16-bit two-state access area.
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
RD
,
CPU cycle
DMAC cycle
Source
address
Destination
address
CPU cycle
T
d
Address
bus
HWR
LWR
Figure 7.15 Burst DMA Bus Timing
When the DMAC is activated from a
DREQ pin there is a minimum interval of four states from
when the transfer is requested until the DMAC starts operating*. The
DREQ pin is not sampled
during the time between the transfer request and the start of the transfer. In short address mode and
normal mode, the pin is next sampled at the end of the read cycle. In block transfer mode, the pin
is next sampled at the end of one block transfer.
Note: * The minimum response time is also four states when the DMAC is activated by an internal
module interrupt.
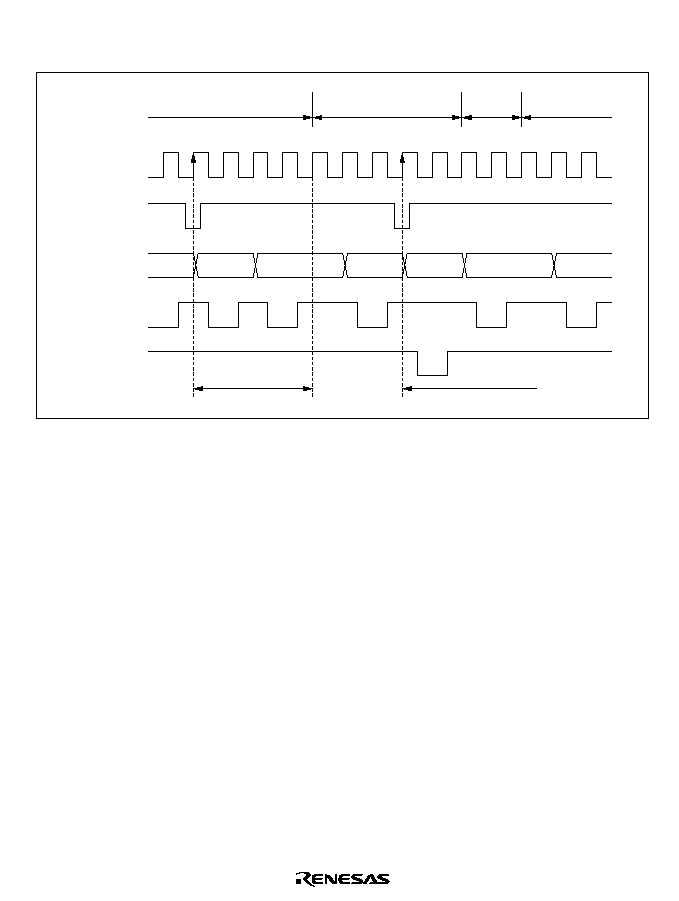
227
Figure 7.16 shows the timing when the DMAC is activated by the falling edge of
DREQ in normal
mode.
DREQ
RD
HWR
T
2
T
1
T
2
T
1
T
2
T
d
T
1
T
2
T
1
T
2
T
1
T
2
T
d
T
1
T
2
LWR
,
CPU cycle
DMAC cycle
CPU
cycle
DMAC cycle
Minimum 4 states
Next sampling point
Address
bus
Figure 7.16 Timing of DMAC Activation by Falling Edge of
DREQ in Normal Mode

228
Figure 7.17 shows the timing when the DMAC is activated by level-sensitive low
DREQ input in
normal mode.
DREQ
RD
HWR
LWR
,
T
2
T
1
T
2
T
1
T
2
T
d
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
CPU cycle
DMAC cycle
CPU cycle
Minimum 4 states
Next sampling point
Address
bus
Figure 7.17 Timing of DMAC Activation by Low
DREQ Level in Normal Mode

229
Figure 7.18 shows the timing when the DMAC is activated by the falling edge of
DREQ in block
transfer mode.
DREQ
RD
HWR
TEND
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
d
T
1
T
2
DMAC cycle
DMAC cycle
CPU cycle
Next sampling
Minimum 4 states
End of 1 block transfer
LWR
,
Address
bus
Figure 7.18 Timing of DMAC Activation by Falling Edge of
DREQ in Block Transfer Mode
230
7.4.9
Multiple-Channel Operation
The DMAC channel priority order is: channel 0 > channel 1 and channel A > channel B.
Table 7.12 shows the complete priority order.
Table 7.12
Channel Priority Order
Short Address Mode
Full Address Mode
Priority
Channel 0A
Channel 0
High
Channel 0B
Channel 1A
Channel 1
Channel 1B
Low
If transfers are requested on two or more channels simultaneously, or if a transfer on one channel
is requested during a transfer on another channel, the DMAC operates as follows.
∑
When a transfer is requested, the DMAC requests the bus right. When it gets the bus right, it
starts a transfer on the highest-priority channel at that time.
∑
Once a transfer starts on one channel, requests to other channels are held pending until that
channel releases the bus.
∑
After each transfer in short address mode, and each externally-requested or cycle-steal transfer
in normal mode, the DMAC releases the bus and returns to step 1. After releasing the bus, if
there is a transfer request for another channel, the DMAC requests the bus again.
∑
After completion of a burst-mode transfer, or after transfer of one block in block transfer
mode, the DMAC releases the bus and returns to step 1. If there is a transfer request for a
higher-priority channel or a bus request from a higher-priority bus master, however, the
DMAC releases the bus after completing the transfer of the current byte or word. After
releasing the bus, if there is a transfer request for another channel, the DMAC requests the bus
again.
Figure 7.19 shows the timing when channel 0A is set up for I/O mode and channel 1 for burst
mode, and a transfer request for channel 0A is received while channel 1 is active.

231
RD
T
1
T
2
T
1
T
2
T
d
T
1
T
2
T
1
T
2
T
1
T
2
T
d
T
1
T
2
T
1
T
2
,
DMAC cycle
(channel 1)
CPU
cycle
DMAC cycle
(channel 0A)
CPU
cycle
DMAC cycle
(channel 1)
Address
bus
HWR
LWR
Figure 7.19 Timing of Multiple-Channel Operations
7.4.10
External Bus Requests, DRAM Interface, and DMAC
During a DMAC transfer, if the bus right is requested by an external bus request signal (
BREQ) or
by the DRAM interface (refresh cycle), the DMAC releases the bus after completing the transfer
of the current byte or word. If there is a transfer request at this point, the DMAC requests the bus
right again. Figure 7.20 shows an example of the timing of insertion of a refresh cycle during a
burst transfer on channel 0.
RD
HWR LWR
,
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
1
T
2
T
d
T
1
T
2
T
1
T
2
T
1
T
2
DMAC cycle (channel 0)
DMAC cycle (channel 0)
Refresh
cycle
Address
bus
Figure 7.20 Bus Timing of DRAM Interface, and DMAC

232
7.4.11
NMI Interrupts and DMAC
NMI interrupts do not affect DMAC operations in short address mode.
If an NMI interrupt occurs during a transfer in full address mode, the DMAC suspends operations.
In full address mode, a channel is enabled when its DTE and DTME bits are both set to 1. NMI
input clears the DTME bit to 0. After transferring the current byte or word, the DMAC releases the
bus to the CPU. In normal mode, the suspended transfer resumes when the CPU sets the DTME
bit to 1 again. Check that the DTE bit is set to 1 and the DTME bit is cleared to 0 before setting
the DTME bit to 1.
Figure 7.21 shows the procedure for resuming a DMAC transfer in normal mode on channel 0
after the transfer was halted by NMI input.
Resuming DMAC transfer
in normal mode
DTE = 1
DTME = 0
Set DTME to 1
DMA transfer continues
End
1.
2.
Check that DTE = 1 and DTME = 0.
Read DTCRB while DTME = 0,
then write 1 in the DTME bit.
2
No
Yes
1
Figure 7.21 Procedure for Resuming a DMAC Transfer Halted by NMI (Example)
For information about NMI interrupts in block transfer mode, see section 7.6.6, NMI Interrupts
and Block Transfer Mode.
233
7.4.12
Aborting a DMAC Transfer
When the DTE bit in an active channel is cleared to 0, the DMAC halts after transferring the
current byte or word. The DMAC starts again when the DTE bit is set to 1. In full address mode,
the DTME bit can be used for the same purpose. Figure 7.22 shows the procedure for aborting a
DMAC transfer by software.
DMAC transfer abort
Set DTCR
DMAC transfer aborted
1
1. Clear the DTE bit to 0 in DTCR.
To avoid generating an interrupt when
aborting a DMA transfer, clear the DTIE
bit to 0 simultaneously.
Figure 7.22 Procedure for Aborting a DMAC Transfer

234
7.4.13
Exiting Full Address Mode
Figure 7.23 shows the procedure for exiting full address mode and initializing the pair of channels.
To set the channels up in another mode after exiting full address mode, follow the setup procedure
for the relevant mode.
Exiting full address mode
Halt the channel
Initialize DTCRB
Initialize DTCRA
Initialized and halted
1
2
3
1.
2.
3.
Clear the DTE bit to 0 in DTCRA, or wait
for the transfer to end and the DTE bit
to be cleared to 0.
Clear all DTCRB bits to 0.
Clear all DTCRA bits to 0.
Figure 7.23 Procedure for Exiting Full Address Mode (Example)
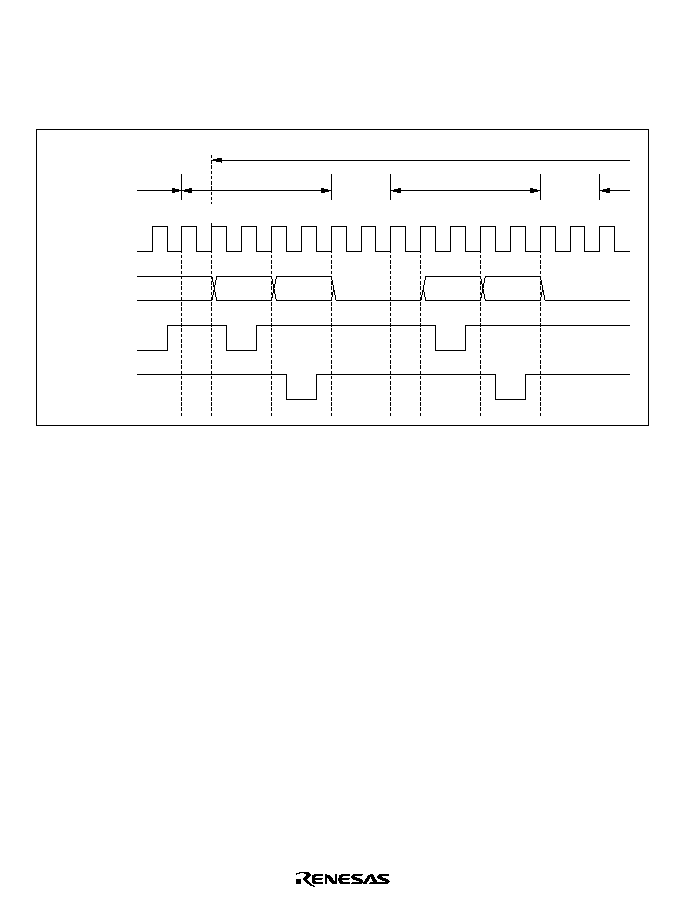
235
7.4.14
DMAC States in Reset State, Standby Modes, and Sleep Mode
When the chip is reset or enters hardware standby mode or software standby mode, the DMAC is
initialized and halts.DMAC operations continue in sleep mode. Figure 7.24 shows the timing of a
cycle-steal transfer in sleep mode.
Address bus
RD
HWR LWR
,
2
T
d
T
T
2
1
T
2
T
d
T
1
T
2
T
1
T
2
T
1
T
CPU cycle
DMAC cycle
DMAC cycle
Sleep mode
d
T
Figure 7.24 Timing of Cycle-Steal Transfer in Sleep Mode

236
7.5
Interrupts
The DMAC generates only DMA-end interrupts. Table 7.13 lists the interrupts and their priority.
Table 7.13
DMAC Interrupts
Description
Interrupt
Short Address Mode
Full Address Mode
Interrupt Priority
DEND0A
End of transfer on channel 0A
End of transfer on channel 0
High
DEND0B
End of transfer on channel 0B
--
DEND1A
End of transfer on channel 1A
End of transfer on channel 1
DEND1B
End of transfer on channel 1B
--
Low
Each interrupt is enabled or disabled by the DTIE bit in the corresponding data transfer control
register (DTCR). Separate interrupt signals are sent to the interrupt controller.
The interrupt priority order among channels is channel 0 > channel 1 and channel A > channel B.
Figure 7.25 shows the DMA-end interrupt logic. An interrupt is requested whenever DTE = 0 and
DTIE = 1.
DTE
DTIE
DMA-end interrupt
Figure 7.25 DMA-End Interrupt Logic
The DMA-end interrupt for the B channels (DENDB) is unavailable in full address mode. The
DTME bit does not affect interrupt operations.

237
7.6
Usage Notes
7.6.1
Note on Word Data Transfer
Word data cannot be accessed starting at an odd address. When word-size transfer is selected, set
even values in the memory and I/O address registers (MAR and IOAR).
7.6.2
DMAC Self-Access
The DMAC itself cannot be accessed during a DMAC cycle. DMAC registers cannot be specified
as source or destination addresses.
7.6.3
Longword Access to Memory Address Registers
A memory address register can be accessed as longword data at the MARR address.
Example
MOV.L
#LBL, ER0
MOV.L
ER0, @MARR
Four byte accesses are performed. Note that the CPU may release the bus between the second byte
(MARE) and third byte (MARH).
Memory address registers should be written and read only when the DMAC is halted.
7.6.4
Note on Full Address Mode Setup
Full address mode is controlled by two registers: DTCRA and DTCRB. Care must be taken to
prevent the B channel from operating in short address mode during the register setup. The enable
bits (DTE and DTME) should not be set to 1 until the end of the setup procedure.

238
7.6.5
Note on Activating DMAC by Internal Interrupts
When using an internal interrupt to activate the DMAC, make sure that the interrupt selected as
the activating source does not occur during the interval after it has been selected but before the
DMAC has been enabled. The on-chip supporting module that will generate the interrupt should
not be activated until the DMAC has been enabled. If the DMAC must be enabled while the on-
chip supporting module is active, follow the procedure in figure 7.26.
Enabling of DMAC
Selected interrupt
requested?
Interrupt hand-
ling by CPU
Clear selected interrupt's
enable bit to 0
Enable DMAC
Set selected interrupt's
enable bit to 1
1
2
3
4
1.
2.
3.
4.
While the DTE bit is cleared to 0,
interrupt requests are sent to the
CPU.
Clear the interrupt enable bit to 0
in the interrupt-generating on-chip
supporting module.
Enable the DMAC.
Enable the DMAC-activating
interrupt.
DMAC operates
Yes
No
Figure 7.26 Procedure for Enabling DMAC while On-Chip Supporting
Module is Operating (Example)
If the DTE bit is set to 1 but the DTME bit is cleared to 0, the DMAC is halted and the selected
activating source cannot generate a CPU interrupt. If the DMAC is halted by an NMI interrupt, for
example, the selected activating source cannot generate CPU interrupts. To terminate DMAC
operations in this state, clear the DTE bit to 0 to allow CPU interrupts to be requested. To continue
DMAC operations, carry out steps 2 and 4 in figure 7.26 before and after setting the DTME bit
to 1.

239
When an ITU interrupt activates the DMAC, make sure the next interrupt does not occur before
the DMA transfer ends. If one 16-bit timer interrupt activates two or more channels, make sure the
next interrupt does not occur before the DMA transfers end on all the activated channels. If the
next interrupt occurs before a transfer ends, the channel or channels for which that interrupt was
selected may fail to accept further activation requests.
7.6.6
NMI Interrupts and Block Transfer Mode
If an NMI interrupt occurs in block transfer mode, the DMAC operates as follows.
∑
When the NMI interrupt occurs, the DMAC finishes transferring the current byte or word, then
clears the DTME bit to 0 and halts. The halt may occur in the middle of a block.
It is possible to find whether a transfer was halted in the middle of a block by checking the
block size counter. If the block size counter does not have its initial value, the transfer was
halted in the middle of a block.
∑
If the transfer is halted in the middle of a block, the activating interrupt flag is cleared to 0. The
activation request is not held pending.
∑
While the DTE bit is set to 1 and the DTME bit is cleared to 0, the DMAC is halted and does
not accept activating interrupt requests. If an activating interrupt occurs in this state, the
DMAC does not operate and does not hold the transfer request pending internally. Neither is a
CPU interrupt requested.
For this reason, before setting the DTME bit to 1, first clear the enable bit of the activating
interrupt to 0. Then, after setting the DTME bit to 1, set the interrupt enable bit to 1 again. See
section 7.6.5, Note on Activating DMAC by Internal Interrupts.
∑
When the DTME bit is set to 1, the DMAC waits for the next transfer request. If it was halted
in the middle of a block transfer, the rest of the block is transferred when the next transfer
request occurs. Otherwise, the next block is transferred when the next transfer request occurs.
7.6.7
Memory and I/O Address Register Values
Table 7.14 indicates the address ranges that can be specified in the memory and I/O address
registers (MAR and IOAR).
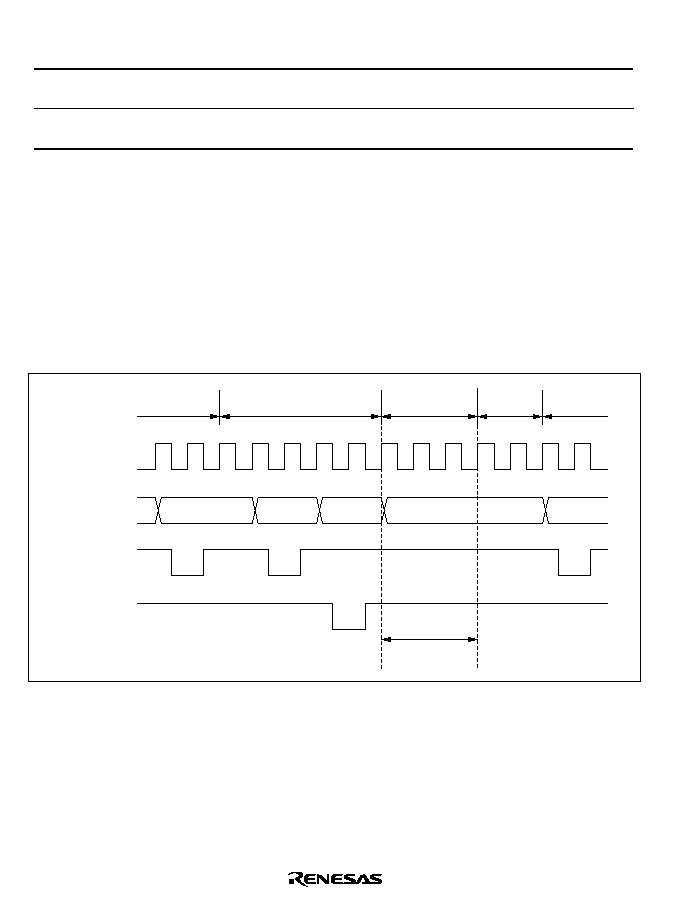
240
Table 7.14
Address Ranges Specifiable in MAR and IOAR
1-Mbyte Mode
16-Mbyte Mode
MAR
H'00000 to H'FFFFF
(0 to 1048575)
H'000000 to H'FFFFFF
(0 to 16777215)
IOAR
H'FFF00 to H'FFFFF
(1048320 to 1048575)
H'FFFF00 to H'FFFFFF
(16776960 to 16777215)
MAR bits 23 to 20 are ignored in 1-Mbyte mode.
7.6.8
Bus Cycle when Transfer is Aborted
When a transfer is aborted by clearing the DTE bit or suspended by an NMI that clears the DTME
bit, if this halts a channel for which the DMAC has a transfer request pending internally, a dead
cycle may occur. This dead cycle does not update the halted channel's address register or counter
value. Figure 7.27 shows an example in which an auto-requested transfer in cycle-steal mode on
channel 0 is aborted by clearing the DTE bit in channel 0.
Address bus
RD
HWR
,
LWR
CPU cycle
DMAC cycle
CPU cycle
DMAC
cycle
CPU cycle
DTE bit is
cleared
T
1
T
2
T
d
T
1
T
2
T
1
T
2
T
1
T
2
T
3
T
d
T
d
T
1
T
2
Figure 7.27 Bus Timing at Abort of DMA Transfer in Cycle-Steal Mode
7.6.9
Transfer Requests by A/D Converter
When the A/D converter is set to scan mode and conversion is performed on more than one
channel, the A/D converter generates a transfer request when all conversions are completed. The
converted data is stored in the appropriate ADDR registers. Block transfer mode and full address
mode should therefore be used to transfer all the conversion results at one time.

241
Section 8 I/O Ports
8.1
Overview
The H8/3006 and H8/3007 have 6 input/output ports (ports 4, 6, 8, 9, A, and B) and one input-only
port (port 7). Table 8.1 summarizes the port functions. The pins in each port are multiplexed as
shown in table 8.1.
Each port has a data direction register (DDR) for selecting input or output, and a data register
(DR) for storing output data. In addition to these registers, port 4 has an input pull-up control
register (PCR) for switching input pull-up transistors on and off.
Ports 4, 6, and 8 can drive one TTL load and a 90-pF capacitive load. Ports 9, A, and B can drive
one TTL load and a 30-pF capacitive load. Ports 4, 6 and 8 to B can drive a darlington transistor
pair. Pins P8
2
to P8
0
, PA
7
to PA
0
have Schmitt-trigger input circuits.
For block diagrams of the ports see appendix C, I/O Port Block Diagrams.
242
Table 8.1
Port Functions
Port
Description
Pins
Mode 1
Mode 2
Mode 3
Mode 4
Port 4
∑
8-bit I/O port
∑
Built-in input
pull-up
transistors
P4
7
to P4
0
/
D
7
to D
0
Data input/output (D
7
to D
0
) and 8-bit generic input/
output
8-bit bus mode: generic input/output16-bit bus
mode: data input/output
Port 6
∑
4-bit I/O port
P6
7
/
Clock output (
) and generic input
P6
2
/
BACK
P6
1
/
BREQ
P6
0
/
WAIT
Bus control signal input/output (
BACK
,
BREQ
,
WAIT
) and 3-bit generic input/output
Port 7
∑
8-bit I/O port
P7
7
/AN
7
/DA
1
P7
6
/AN
6
/DA
0
Analog input (AN
7
, AN
6
) to A/D converter, analog
output (DA
1
, DA
0
) from D/A converter, and generic
input
P7
5
to P7
0
/
AN
5
to AN
0
Analog input (AN
5
to AN
0
) to A/D converter, and
generic input
Port 8
∑
5-bit I/O port
∑
P8
2
to P8
0
have
Schmitt inputs
P8
4
/
CS
0
DDR = 0: generic input
DDR = 1 (reset value):
CS
0
output
P8
3
/
IRQ
3
/
CS
1
/
ADTRG
IRQ
3
input,
CS
1
output, external trigger input
(
ADTRG
) to A/D converter, and generic input
DDR = 0 (reset value): generic input
DDR = 1:
CS
1
output
P8
2
/
IRQ
2
/
CS
2
P8
1
/
IRQ
1
/
CS
3
IRQ
2
and
IRQ
1
input,
CS
2
and
CS
3
output, and
generic input
DDR = 0 (reset value): generic input
DDR = 1:
CS
2
and
CS
3
output
P8
0
/
IRQ
0
/
RFSH
IRQ
0
input,
RFSH
output, and generic input/output
Port 9
∑
6-bit I/O port
P9
5
/
IRQ
5
/SCK
1
P9
4
/
IRQ
4
/SCK
0
P9
3
/RxD
1
P9
2
/RxD
0
P9
1
/TxD
1
P9
0
/TxD
0
Input and output (SCK
1
, SCK
0
, RxD
1
, RxD
0
, TxD
1
,
TxD
0
) for serial communication interfaces 1 and 0
(SCI1/0),
IRQ
5
and
IRQ
4
input, and 6-bit generic
input/output
243
Port
Description
Pins
Mode 1
Mode 2
Mode 3
Mode 4
Port A
∑
8-bit I/O port
∑
Schmitt inputs
PA
7
/TP
7
/TIOCB
2
/
A
20
Output (TP
7
) from pro-
grammable timing
pattern controller (TPC),
input or output (TIOCB
2
)
for 16-bit timer and
generic input/output
Address output (A
20
)
PA
6
/TP
6
/TIOCA
2
/
A
21
PA
5
/TP
5
/TIOCB
1
/
A
22
PA
4
/TP
4
/TIOCA
1
/
A
23
TPC output (TP
6
to TP
4
),
16-bit timer input and
output (TIOCA
2
, TIOCB
1
,
TIOCA
1
), and generic
input/output
TPC output (TP
6
to TP
4
),
16-bit timer input and
output (TIOCA
2
, TIOCB
1
,
TIOCA
1
), address output
(A
23
to A
21
), and generic
input/output
PA
3
/TP
3
/TIOCB
0
/
TCLKD
PA
2
/TP
2
/TIOCA
0
/
TCLKC
PA
1
/TP
1
/TCLKB/
TEND
1
PA
0
/TP
0
/TCLKA/
TEND
0
TPC output (TP
3
to TP
0
), 16-bit timer input and
output (TIOCB
0
, TIOCA
0
, TCLKD, TCLKC, TCLKB,
TCLKA), 8-bit timer input (TCLKD, TCLKC, TCLKB,
TCLKA), output (
TEND
1
,
TEND
0
) from DMA
controller (DMAC), and generic input/output
Port B
∑
8-bit I/O port
PB
7
/TP
15
/RXD
2
PB
6
/TP
14
/TXD
2
PB
5
/TP
13
/SCK
2
/
LCAS
PB
4
/TP
12
/
UCAS
TPC output (TP
15
to TP
12
), SCI2 input and output
(SCK
2
, RxD
2
, TxD
2
), DRAM interface output (
LCAS
,
UCAS
), and generic input/output
PB
3
/TP
11
/TMIO
3
/
DREQ
1
/
CS
4
PB
2
/TP
10
/TMO
2
/
CS
5
PB
1
/TP
9
/TMIO
1
/
DREQ
0
/
CS
6
PB
0
/TP
8
/TMO
0
/
CS
7
TPC output (TP
11
to TP
8
), 8-bit timer input and
output (TMIO
3
, TMO
2
, TMIO
1
, TMO
0
), DMAC input
(
DREQ
1
,
DREQ
0
),
CS
7
to
CS
4
output, and generic
input/output

244
8.2
Port 4
8.2.1
Overview
Port 4 is an 8-bit input/output port with the pin configuration shown in figure 8.1.
When the bus width control register (ABWCR) designates areas 0 to 7 all as 8-bit-access areas, the
chip operates in 8-bit bus mode and port 4 is a generic input/output port. When at least one of
areas 0 to 7 is designated as a 16-bit-access area, the chip operates in 16-bit bus mode and port 4
becomes part of the data bus.
Port 4 has software-programmable built-in pull-up transistors.
Pins in port 4 can drive one TTL load and a 90-pF capacitive load. They can also drive a
darlington transistor pair.
Port 4
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
P4 /D
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
P4 (input/output)/D
7
(input/output)
P4 (input/output)/D
6
(input/output)
P4 (input/output)/D
5
(input/output)
P4 (input/output)/D
4
(input/output)
P4 (input/output)/D
3
(input/output)
P4 (input/output)/D
2
(input/output)
P4 (input/output)/D
1
(input/output)
P4 (input/output)/D
0
(input/output)
7
6
5
4
3
2
1
0
Port 4 pins
Figure 8.1 Port 4 Pin Configuration
245
8.2.2
Register Configuration
Table 8.2 summarizes the registers of port 4.
Table 8.2
Port 4 Registers
Address*
Name
Abbreviation
R/W
Initial Value
H'EE003
Port 4 data direction register
P4DDR
W
H'00
H'FFFD3
Port 4 data register
P4DR
R/W
H'00
H'EE03E
Port 4 input pull-up control register
P4PCR
R/W
H'00
Note:
*
Lower 20 bits of the address in advanced mode.
Port 4 Data Direction Register (P4DDR): P4DDR is an 8-bit write-only register that can select
input or output for each pin in port 4.
Bit
Initial value
Read/Write
7
P4 DDR
0
W
Port 4 data direction 7 to 0
These bits select input or output for port 4 pins
7
6
P4 DDR
0
W
6
5
P4 DDR
0
W
5
4
P4 DDR
0
W
4
3
P4 DDR
0
W
3
2
P4 DDR
0
W
2
1
P4 DDR
0
W
1
0
P4 DDR
0
W
0
When all areas are designated as 8-bit-access areas by the bus controller's bus width control
register (ABWCR), selecting 8-bit bus mode, port 4 functions as an input/output port. In this case,
a pin in port 4 becomes an output port if the corresponding P4DDR bit is set to 1, and an input
port if this bit is cleared to 0.
When at least one area is designated as a 16-bit-access area, selecting 16-bit bus mode, port 4
functions as part of the data bus, regardless of the P4DDR settings.
P4DDR is initialized to H'00 by a reset and in hardware standby mode. In software standby mode
it retains its previous setting.
ABWCR and P4DDR are not initialized in software standby mode. When port 4 functions as a
generic input/output port, if a P4DDR bit is set to 1, the corresponding pin maintains its output
state in software standby mode.

246
Port 4 Data Register (P4DR): P4DR is an 8-bit readable/writable register that stores output data
for port 4. When port 4 functions as an output port, the value of this register is output. When a bit
in P4DDR is set to 1, if port 4 is read the value of the corresponding P4DR bit is returned. When a
bit in P4DDR is cleared to 0, if port 4 is read the corresponding pin level is read.
Bit
Initial value
Read/Write
7
P4
0
R/W
Port 4 data 7 to 0
These bits store data for port 4 pins
7
6
P4
0
R/W
6
5
P4
0
R/W
5
4
P4
0
R/W
4
3
P4
0
R/W
3
2
P4
0
R/W
2
1
P4
0
R/W
1
0
P4
0
R/W
0
P4DR is initialized to H'00 by a reset and in hardware standby mode. In software standby mode it
retains its previous setting.
Port 4 Input Pull-Up MOS Control Register (P4PCR): P4PCR is an 8-bit readable/writable
register that controls the MOS input pull-up transistors in port 4.
Bit
Initial value
Read/Write
7
P4 PCR
0
R/W
Port 4 input pull-up control 7 to 0
These bits control input pull-up transistors built into port 4
7
6
P4 PCR
0
R/W
6
5
P4 PCR
0
R/W
5
4
P4 PCR
0
R/W
4
3
P4 PCR
0
R/W
3
2
P4 PCR
0
R/W
2
1
P4 PCR
0
R/W
1
0
P4 PCR
0
R/W
0
In 8-bit bus mode when a P4DDR bit is cleared to 0 (selecting generic input), if the corresponding
P4PCR bit is set to 1, the input pull-up transistor is turned on.
P4PCR is initialized to H'00 by a reset and in hardware standby mode. In software standby mode it
retains its previous setting.
Table 8.3 summarizes the states of the input pull-ups in each operating mode.
247
Table 8.3
Input Pull-Up Transistor States (Port 4)
Mode
Reset
Hardware
Standby Mode
Software
Standby Mode
Other Modes
8-bit bus mode
Off
Off
On/off
On/off
16-bit bus mode
Off
Off
Legend
Off:
The input pull-up transistor is always off.
On/off: The input pull-up transistor is on if P4PCR = 1 and P4DDR = 0. Otherwise, it is off.
8.3
Port 6
8.3.1
Overview
Port 6 is an 4-bit input/output port that is also used for input and output of bus control signals
(
BACK, BREQ, WAIT) and for clock (
) output.
The port 6 pin configuration is shown in figure 8.2.
The pin in port 6 functions are P6
7
(generic input)/
, P6
2
/
BACK, P6
1
/
BREQ, and P6
0
/
WAIT. See
table 8.5 for the selection of the pin functions.
See Section 19, Power-Down State, for clock output pin. See Section 6, Bus Controller, for bus
control I/O pin (
BACK, BREQ and WAIT).
Pins in port 6 can drive one TTL load and a 90-pF capacitive load. They can also drive a
darlington transistor pair.
Port 6
P6
7
/
P6
2
/
BACK
P6
1
/
BREQ
P6
0
/
WAIT
Port 6 pins
P6
7
(input)/
(output)
P6
2
(input/output)/
BACK
(output)
P6
1
(input/output)/
BREQ
(input)
P6
0
(input/output)/
WAIT
(input)
Figure 8.2 Port 6 Pin Configuration

248
8.3.2 Register Configuration
Table 8.4 summarizes the registers of port 6.
Table 8.4
Port 6 Registers
Address*
Name
Abbreviation
R/W
Initial Value
H'EE005
Port 6 data direction register
P6DDR
W
H'80
H'FFFD5
Port 6 data register
P6DR
R/W
H'80
Note: * Lower 20 bits of the address in advanced mode.
Port 6 Data Direction Register (P6DDR): P6DDR is an 8-bit write-only register that can select
input or output for each pin in port 6.
Bits 7 to 3 are reserved. Bit 7 is fixed at 1, and cannot be modified.
Bit
Initial value
Read/Write
7
--
1
--
6
P6
6
DDR
0
W
5
P6
5
DDR
0
W
4
P6
4
DDR
0
W
3
P6
3
DDR
0
W
2
P6
2
DDR
0
W
1
P6
1
DDR
0
W
0
P6
0
DDR
0
W
Port 6 data direction 2 to 0
These bits select input or
output for port 6 pins
Reserved bit
P6
7
functions as the clock output pin (
) or an input port. P6
7
is the clock input pin (
) if the
PSTOP bit in MSTCRH is cleared to 0 (initial value), and an input port if this bit is set to 1.
When P6
2
to P6
0
function as input/output ports, the pin becomes an output port if the
corresponding P6DDR bit is set to 1, and an input port if this bit is cleared to 0.
P6DDR is a write-only register. Its value cannot be read. All bits return 1 when read.
P6DDR is initialized to H'80 by a reset and in hardware standby mode. In software standby mode,
it retains its previous setting. When port 6 functions as a generic input/output port, if a P6DDR bit
is set to 1, the corresponding pin maintains its output state in software standby mode.

249
Port 6 Data Register (P6DR): P6DR is an 8-bit readable/writable register that stores output data
for port 6. When port 6 functions as an output port, the value of this register is output.
Bit
Initial value
Read/Write
Note:
*
Determined by pin P6
7
.
7
P6
7
*
R
6
P6
6
0
R/W
5
P6
5
0
R/W
4
P6
4
0
R/W
3
P6
3
0
R/W
2
P6
2
0
R/W
1
P6
1
0
R/W
0
P6
0
0
R/W
Data for port 6 pins
Bits storing data for port 1 pins
Reserved bit
Bit 7 returns 1 if read when the PSTOP bit in MSTCRH is 0, and returns the logic level of pin P6
7
if read when the PSTOP bit is 1. This bit cannot be modified.
Bits 6 to 3 are reserved; they can be read and written to, but cannot be used as ports.
The P6DR value is returned if P6DR is read while the corresponding bit (P6
6
DDR to P6
3
DDR) in
P6DDR is set to 1, and an undefined value is returned if P6DR is read while the corresponding bit
is cleared to 0.
For bits 2 to 0, the pin logic level is returned if the bit is read while the corresponding bit in
P6DDR is cleared to 0, and the P6DR value is returned if the bit is read while the corresponding
bit in P6DDR is set to 1.
P6DR is initialized to H'80 by a reset and in hardware standby mode. In software standby mode it
retains its previous setting.

250
Table 8.5
Port 6 Pin Functions
Pin
Pin Functions and Selection Method
P6
7
/
Bit PSTOP in MSTCRH selects the pin function as follows.
PSTOP
0
1
Pin function
output
P6
7
input
P6
2
/
BACK
Bit BRLE in BRCR and bit P6
2
DDR select the pin function as follows.
BRLE
0
1
P6
2
DDR
0
1
--
Pin function
P6
2
input
P6
2
output
BACK
output
P6
1
/
BREQ
Bit BRLE in BRCR and bit P6
1
DDR select the pin function as follows.
BRLE
0
1
P6
1
DDR
0
1
--
Pin function
P6
1
input
P6
1
output
BREQ
input
P6
0
/
WAIT
Bit WAITE in BCR and bit P6
0
DDR select the pin function as follows.
WAITE
0
1
P6
0
DDR
0
1
0*
Pin function
P6
0
input
P6
0
output
WAIT
input
Note: * Do not set bit P6
0
DDR to 1.

251
8.4
Port 7
8.4.1
Overview
Port 7 is an 8-bit input-only port that is also used for analog input to the A/D converter and analog
output from the D/A converter. The pin functions are the same in all operating modes. Figure 8.3
shows the pin configuration of port 7.
See section 15, A/D Converter, for details of the A/D converter analog input pins, and section 16,
D/A Converter, for details of the D/A converter analog output pins.
Port 7
P7 (input)/AN (input)/DA (output)
P7 (input)/AN (input)/DA (output)
P7 (input)/AN (input)
P7 (input)/AN (input)
P7 (input)/AN (input)
P7 (input)/AN (input)
P7 (input)/AN (input)
P7 (input)/AN (input)
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
Port 7 pins
1
0
Figure 8.3 Port 7 Pin Configuration
252
8.4.2
Register Configuration
Table 8.6 summarizes the port 7 register. Port 7 is an input-only port, and so has no data direction
register.
Table 8.6
Port 7 Data Register
Address*
Name
Abbreviation
R/W
Initial Value
H'FFFD6
Port 7 data register
P7DR
R
Undetermined
Note:
*
Lower 20 bits of the address in advanced mode.
Port 7 Data Register (P7DR)
Bit
Initial value
Read/Write
0
P7
--
R
*
Note: *
0
1
P7
--
R
*
1
2
P7
--
R
*
2
3
P7
--
R
*
3
4
P7
--
R
*
4
5
P7
--
R
*
5
6
P7
--
R
*
6
7
P7
--
R
*
7
7
0
Determined by pins P7 to P7 .
When port 7 is read, the pin levels are always read. P7DR cannot be modified.
253
8.5
Port 8
8.5.1
Overview
Port 8 is a 5-bit input/output port that is also used for
CS
3
to
CS
0
output,
RFSH output, IRQ
3
to
IRQ
0
input, and A/D converter
ADTRG input. Figure 8.4 shows the pin configuration of port 8.
See table 8.8 for the selection of pin functions.
See section 15, A/D Converter, for a description of the A/D converter's
ADTRG input pin.
The
IRQ
3
to
IRQ
0
functions are selected by IER settings, regardless of whether the pin is used for
input or output. Caution is therefore required. For details see section 5, Interrupt Controller.
When DRAM is connected to areas 2 to 5, the
CS
3
and
CS
2
output pins function as
RAS output
pins for each area. For details see section 6.5, DRAM Interface.
Pins in port 8 can drive one TTL load and a 90-pF capacitive load. They can also drive a
darlington transistor pair.
Pins P8
2
to P8
0
have Schmitt-trigger inputs.
Port 8
P8 /
P8 / /
P8 / /
P8 / /
P8 / /
4
3
2
1
0
0
1
2
3
Port 8 pins
Pin functions in modes 1 to 4
CS
CS
CS
CS
RFSH
3
2
1
IRQ
/
ADTRG
IRQ
IRQ
IRQ
0
P8 (input)/ (output)
P8 (input)/ (output)/ (input) /
ADTRG
(input)
P8 (input)/ (output)/ (input)
P8 (input/output)/
CS
3
(output)/
IRQ
1
(input)
P8 (input/output)/ (output)/ (input)
4
3
2
1
0
0
1
2
CS
CS
CS
RFSH
3
2
IRQ
IRQ
IRQ
0
Figure 8.4 Port 8 Pin Configuration
254
8.5.2
Register Configuration
Table 8.7 summarizes the registers of port 8.
Table 8.7
Port 8 Registers
Initial Value
Address*
Name
Abbreviation
R/W
Mode 1 to 4
H'EE007
Port 8 data direction
register
P8DDR
W
H'F0
H'FFFD7
Port 8 data register
P8DR
R/W
H'E0
Note:
*
Lower 20 bits of the address in advanced mode.
Port 8 Data Direction Register (P8DDR): P8DDR is an 8-bit write-only register that can select
input or output for each pin in port 8.
Bits 7 to 5 are reserved. They are fixed at 1, and cannot be modified.
7
--
1
--
6
--
1
--
5
--
1
--
4
P8
4
DDR
1
W
3
P8
3
DDR
0
W
2
P8
2
DDR
0
W
1
P8
1
DDR
0
W
0
P8
0
DDR
0
W
Reserved bits
Port 8 data direction 4 to 0
These bits select input or
output for port 8 pins
Bit
Initial value
Read/Write
Modes
1 to 4
When bits in P8DDR bit are set to 1, P8
4
to P8
1
become
CS
0
to
CS
3
output pins. When bits in
P8DDR are cleared to 0, the corresponding pins become input ports. Following a reset P8
4
functions as the
CS
0
output, while the other three pins are input ports.
When the refresh enable bit (RFSHE) in DRCRA is set to 1, P8
0
is used for
RFSH output. When
RFSHE is cleared to 0, P8
0
becomes an input/output port according to the P8DDR setting. For
details see table 8.8.
P8DDR is a write-only register. Its value cannot be read. All bits return 1 when read.
255
P8DDR is initialized to H'F0 by a reset and in hardware standby mode. In software standby mode
P8DDR retains its previous setting. Therefore, when port 8 functions as an input/output port, if a
transition is made to software standby mode while a P8DDR bit is set to 1, the corresponding pin
maintains its output state.
Port 8 Data Register (P8DR): P8DR is an 8-bit readable/writable register that stores output data
for port 8. When a bit in P8DDR is set to 1, if port 8 is read the value of the corresponding P8DR
bit is returned. When a bit in P8DDR is cleared to 0, if port 8 is read the corresponding pin level
is read.
Bits 7 to 5 are reserved. They cannot be modified and always are read as 1.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
P8
0
R/W
4
3
P8
0
R/W
3
2
P8
0
R/W
2
1
P8
0
R/W
1
0
P8
0
R/W
0
Reserved bits
Port 8 data 4 to 0
These bits store data
for port 8 pins
P8DR is initialized to H'E0 by a reset and in hardware standby mode. In software standby mode it
retains its previous setting.
256
Table 8.8
Port 8 Pin Functions
Pin
Pin Functions and Selection Method
P8
4
/
CS
0
Bit P8
4
DDR selects the pin function as follows.
P8
4
DDR
0
1
Pin function
P8
4
input
CS
0
output
P8
3
/
CS
1
/
IRQ
3
/
ADTRG
Bit P8
3
DDR selects the pin function as follows
P8
3
DDR
0
1
Pin function
P8
3
input
CS
1
output
IRQ
3
input
ADTRG
input
P8
2
/
CS
2
/
IRQ
2
The DRAM interface settings by bits DRAS2 to DRAS0 in DRCRA, and bit P8
2
DDR, select the
pin function as follows.
DRAM interface
settings
(1) in table below
|(2) in table below
P8
2
DDR
0
1
--
Pin function
P8
2
input
CS
2
output
CS
2
output*
IRQ
3
input
Note: *
CS
2
is output as
RAS
2
.
DRAM interface
setting
(1)
(2)
DRAS2
0
1
DRAS1
0
1
0
1
DRAS0
0
1
0
1
0
1
0
1
P8
1
/
CS
3
/
IRQ
1
The DRAM interface settings by bits DRAS2 to DRAS0 in DRCRA, and bit P8
1
DDR, select the
pin function as follows.
DRAM interface
settings
(1) in table below
(2) in table below
(3) in table
below
P8
1
DDR
0
1
0
1
--
Pin function
P8
1
input
CS
3
output
P8
1
input
P8
1
output
CS
3
output*
IRQ
1
input
Note: *
CS
3
is output as
RAS
3
.
DRAM interface
setting
(1)
(3)
(2)
(3)
(2)
DRAS2
0
1
DRAS1
0
1
0
1
DRAS0
0
1
0
1
0
1
0
1
P8
0
/
RFSH
/
IRQ
0
Bit RFSHE in DRCRA and bit P8
0
DDR select the pin function as follows. If areas 2 to 5 are not
designated as DRAM space, do not set bit RFSHE in DRCRA to 1.
RFSHE
0
1
P8
0
DDR
0
1
--
Pin function
P8
0
input
P8
0
output
RFSH
output
IRQ
0
input

257
8.6
Port 9
8.6.1
Overview
Port 9 is a 6-bit input/output port that is also used for input and output (TxD
0
, TxD
1
, RxD
0
, RxD
1
,
SCK
0
, SCK
1
) by serial communication interface channels 0 and 1 (SCI0 and SCI1), and for
IRQ
5
and
IRQ
4
input. See table 8.10 for the selection of pin functions.
The
IRQ
5
and
IRQ
4
functions are selected by IER settings, regardless of whether the pin is used
for input or output. Caution is therefore required. For details see section 5.3.1, External Interrupts.
Port 9 has the same set of pin functions in all operating modes. Figure 8.5 shows the pin
configuration of port 9.
Pins in port 9 can drive one TTL load and a 30-pF capacitive load. They can also drive a
darlington transistor pair.
Port 9
P9 (input/output)/SCK
P9 (input/output)/SCK
P9 (input/output)/RxD (input)
P9 (input/output)/RxD (input)
P9 (input/output)/TxD (output)
P9 (input/output)/TxD (output)
5
4
3
2
1
0
Port 9 pins
1
0
(input/output)/
IRQ
(input)
(input/output)/
IRQ
(input)
5
4
1
0
1
0
Figure 8.5 Port 9 Pin Configuration
258
8.6.2
Register Configuration
Table 8.9 summarizes the registers of port 9.
Table 8.9
Port 9 Registers
Address*
Name
Abbreviation
R/W
Initial Value
H'EE008
Port 9 data direction register
P9DDR
W
H'C0
H'FFFD8
Port 9 data register
P9DR
R/W
H'C0
Note:
*
Lower 20 bits of the address in advanced mode.
Port 9 Data Direction Register (P9DDR): P9DDR is an 8-bit write-only register that can select
input or output for each pin in port 9.
Bits 7 and 6 are reserved. They cannot be modified and always read as 1.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
P9 DDR
0
W
5
4
P9 DDR
0
W
4
3
P9 DDR
0
W
3
2
P9 DDR
0
W
2
1
P9 DDR
0
W
1
0
P9 DDR
0
W
0
Reserved bits
Port 9 data direction 5 to 0
These bits select input or
output for port 9 pins
When a pin in port 9 becomes an output port if the corresponding P9DDR bit is set to 1, and an
input port if this bit is cleared to 0.
P9DDR is a write-only register. Its value cannot be read. All bits return 1 when read.
P9DDR is initialized to H'C0 by a reset and in hardware standby mode. In software standby mode
it retains its previous setting. When transition is made to software standby mode while a P9DDR
bit is set to 1, the corresponding pin maintains its output state.

259
Port 9 Data Register (P9DR): P9DR is an 8-bit readable/writable register that stores output data
for port 9. When port 9 functions as an output port, the value of this register is output. When a bit
in P9DDR is set to 1, if port 9 is read the value of the corresponding P9DR bit is returned. When a
bit in P9DDR is cleared to 0, if port 9 is read the corresponding pin level is read.
Bits 7 and 6 are reserved. They cannot be modified and are always read as 1.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
P9
0
R/W
4
P9
0
R/W
4
3
P9
0
R/W
3
2
P9
0
R/W
2
1
P9
0
R/W
1
0
P9
0
R/W
0
Reserved bits
Port 9 data 5 to 0
These bits store data
for port 9 pins
5
P9DR is initialized to H'C0 by a reset and in hardware standby mode. In software standby mode it
retains its previous setting.
260
Table 8.10
Port 9 Pin Functions
Pin
Pin Functions and Selection Method
P9
5
/SCK
1
/
IRQ
5
Bit C/
A
in SMR of SCI1, bits CKE0 and CKE1 in SCR, and bit P9
5
DDR select the pin function
as follows.
CKE1
0
1
C/
A
0
1
--
CKE0
0
1
--
--
P9
5
DDR
0
1
--
--
--
Pin function
P9
5
input
P9
5
output
SCK
1
output
SCK
1
output
SCK
1
input
IRQ
5
input
P9
4
/SCK
0
/
IRQ
4
Bit C/
A
in SMR of SCI0, bits CKE0 and CKE1 in SCR, and bit P9
4
DDR select the pin function
as follows.
CKE1
0
1
C/
A
0
1
--
CKE0
0
1
--
--
P9
4
DDR
0
1
--
--
--
Pin function
P9
4
input
P9
4
output
SCK
0
output
SCK
0
output
SCK
0
input
IRQ
4
input
P9
3
/RxD
1
Bit RE in SCR of SCI1, bit SMIF in SCMR, and bit P9
3
DDR select the pin function as follows.
SMIF
0
1
RE
0
1
--
P9
3
DDR
0
1
--
--
Pin function
P9
3
input
P9
3
output
RxD
1
input
RxD
1
input
P9
2
/RxD
0
Bit RE in SCR of SCI0, bit SMIF in SCMR, and bit P9
2
DDR select the pin function as follows.
SMIF
0
1
RE
0
1
--
P9
2
DDR
0
1
--
--
Pin function
P9
2
input
P9
2
output
RxD
0
input
RxD
0
input
261
Pin
Pin Functions and Selection Method
P9
1
/TxD
1
Bit TE in SCR of SCI1, bit SMIF in SCMR, and bit P9
1
DDR select the pin function as follows.
SMIF
0
1
TE
0
1
--
P9
1
DDR
0
1
--
--
Pin function
P9
1
input
P9
1
output
TxD
1
output
TxD
1
output*
Note: * Functions as the TxD
1
output pin, but there are two states: one in which the pin is
driven, and another in which the pin is at high-impedance.
P9
0
/TxD
0
Bit TE in SCR of SCI0, bit SMIF in SCMR, and bit P9
0
DDR select the pin function as follows.
SMIF
0
1
TE
0
1
--
P9
0
DDR
0
1
--
--
Pin function
P9
0
input
P9
0
output
TxD
0
output
TxD
0
output*
Note: * Functions as the TxD
0
output pin, but there are two states: one in which the pin is
driven, and another in which the pin is at highimpedance.
8.7
Port A
8.7.1
Overview
Port A is an 8-bit input/output port that is also used for output (TP
7
to TP
0
) from the programmable
timing pattern controller (TPC), input and output, (TIOCB
2
, TIOCA
2
, TIOCB
1
, TIOCA
1
, TIOCB
0
,
TIOCA
0
, TCLKD, TCLKC, TCLKB, TCLKA) by the 16-bit timer, input (TCLKD, TCLKC,
TCLKB, TCLKA) to the 8-bit timer, output (
TEND
1
,
TEND
0
) from the DMA controller (DMAC),
and address output (A
23
to A
20
). A reset or hardware standby transition leaves port A as an input
port, except that in modes 3 and 4, one pin is always used for A
20
output. See table 8.12 to 8.14 for
the selection of pin functions.
Usage of pins for TPC, 16-bit timer, 8-bit timer, and DMAC input and output is described in the
sections on those modules. For output of address bits A
23
to A
21
in modes 3 and 4, see section
6.2.4, Bus Release Control Register (BRCR). Pins not assigned to any of these functions are
available for generic input/output. Figure 8.6 shows the pin configuration of port A.
Pins in port A can drive one TTL load and a 30-pF capacitive load. They can also drive a
darlington transistor pair. Port A has Schmitt-trigger inputs.

262
Port A
PA /TP /TIOCB /A
PA /TP /TIOCA /A
21
PA /TP /TIOCB /A
22
PA /TP /TIOCA /A
23
PA /TP /TIOCB /TCLKD
PA /TP /TIOCA /TCLKC
PA /TP /
TEND
/TCLKB
PA /TP /
TEND
/TCLKA
7
6
5
4
3
2
1
0
Port A pins
7
6
5
4
3
2
1
0
2
2
1
1
1
0
0
0
PA (input/output)/TP (output)/TIOCB (input/output)
PA (input/output)/TP (output)/TIOCA (input/output)
PA (input/output)/TP (output)/TIOCB (input/output)
PA (input/output)/TP (output)/TIOCA (input/output)
7
6
5
4
3
2
1
0
Pin functions in modes 1 and 2
PA (input/output)/TP (output)/TIOCB (input/output)/TCLKD (input)
PA (input/output)/TP (output)/TIOCA (input/output)/TCLKC (input)
PA (input/output)/TP (output)/
TEND
(output)/TCLKB (input)
PA (input/output)/TP (output)/
TEND
(output)/TCLKA (input)
7
6
5
4
3
2
1
0
2
2
1
1
0
0
1
0
A (output)
20
PA (input/output)/TP (output)/TIOCA (input/output)/A (output)
PA (input/output)/TP (output)/TIOCB (input/output)/A (output)
PA (input/output)/TP (output)/TIOCA (input/output)/A (output)
6
5
4
3
2
1
0
Pin functions in modes 3 and 4
6
5
4
3
2
1
0
2
1
1
0
0
PA (input/output)/TP (output)/
TEND
(output)/TCLKA (input)
PA (input/output)/TP (output)/TIOCB (input/output)/TCLKD (input)
PA (input/output)/TP (output)/TIOCA (input/output)/TCLKC (input)
PA (input/output)/TP (output)/
TEND
(output)/TCLKB (input)
1
0
20
21
22
23
Figure 8.6 Port A Pin Configuration
263
8.7.2
Register Configuration
Table 8.11 summarizes the registers of port A.
Table 8.11
Port A Registers
Initial Value
Address*
Name
Abbreviation
R/W
Modes 1, 2
Modes 3, 4
H'EE009
Port A data direction
register
PADDR
W
H'00
H'80
H'FFFD9
Port A data register
PADR
R/W
H'00
H'00
Note:
*
Lower 20 bits of the address in advanced mode.
Port A Data Direction Register (PADDR): PADDR is an 8-bit write-only register that can select
input or output for each pin in port A. When pins are used for TPC output, the corresponding
PADDR bits must also be set.
7
PA DDR
1
--
0
W
Port A data direction 7 to 0
These bits select input or output for port A pins
7
6
PA DDR
0
W
0
W
6
5
PA DDR
0
W
0
W
5
4
PA DDR
0
W
0
W
4
3
PA DDR
0
W
0
W
3
2
PA DDR
0
W
0
W
2
1
PA DDR
0
W
0
W
1
0
PA DDR
0
W
0
W
0
Bit
Modes
3, 4,
Initial value
Read/Write
Initial value
Read/Write
Modes
1, 2
A pin in port A becomes an output port if the corresponding PADDR bit is set to 1, and an input
port if this bit is cleared to 0. In modes 3 and 4, PA
7
DDR is fixed at 1 and PA
7
functions as an
address output pin.
PADDR is a write-only register. Its value cannot be read. All bits return 1 when read.
PADDR is initialized to H'00 (modes 1 and 2) or H'80 (modes 3 and 4) by a reset and in hardware
standby mode. In software standby mode it retains it previous setting. Therefore, if a transition is
made to software standby mode while a PADDR bit is set to 1, the corresponding pin maintains its
output state.
264
Port A Data Register (PADR): PADR is an 8-bit readable/writable register that stores output
data for port A. When port A functions as an output port, the value of this register is output. When
a bit in PADDR is set to 1, if port A is read the value of the corresponding PADR bit is returned.
When a bit in PADDR is cleared to 0, if port A is read the corresponding pin level is read.
Bit
Initial value
Read/Write
0
PA
0
R/W
0
1
PA
0
R/W
1
2
PA
0
R/W
2
3
PA
0
R/W
3
4
PA
0
R/W
4
5
PA
0
R/W
5
6
PA
0
R/W
6
7
PA
0
R/W
7
Port A data 7 to 0
These bits store data for port A pins
PADR is initialized to H'00 by a reset and in hardware standby mode. In software standby mode it
retains its previous setting.
Table 8.12
Port A Pin Functions (Modes 1, 2)
Pin
Pin Functions and Selection Method
PA
7
/TP
7
/
TIOCB
2
Bit PWM2 in TMDR, bits IOB2 to IOB0 in TIOR2, bit NDER7 in NDERA, and bit PA
7
DDR select the pin
function as follows.
16-bit timer channel 2
settings
(1) in table below
(2) in table below
PA
7
DDR
--
0
1
1
NDER7
--
--
0
1
Pin function
TIOCB
2
output
PA
7
input
PA
7
output
TP
7
output
TIOCB
2
input*
Note: * TIOCB
2
input when IOB2 = 1 and PWM2 = 0.
16-bit timer channel 2
settings
(2)
(1)
(2)
IOB2
0
1
IOB1
0
0
1
--
IOB0
0
1
--
--
265
Pin
Pin Functions and Selection Method
PA
6
/TP
6
/
TIOCA
2
Bit PWM2 in TMDR, bits IOA2 to IOA0 in TIOR2, bit NDER6 in NDERA, and bit PA
6
DDR select the pin
function as follows.
16-bit timer channel 2
settings
(1) in table below
(2) in table below
PA
6
DDR
--
0
1
1
NDER6
--
--
0
1
Pin function
TIOCA
2
output
PA
6
input
PA
6
output
TP
6
output
TIOCA
2
input*
Note: * TIOCA
2
input when IOA2 = 1.
16-bit timer channel 2
settings
(2)
(1)
(2)
(1)
PWM2
0
1
IOA2
0
1
--
IOA1
0
0
1
--
--
IOA0
0
1
--
--
--
PA
5
/TP
5
/
TIOCB
1
Bit PWM1 in TMDR, bits IOB2 to IOB0 in TIOR1, bit NDER5 in NDERA, and bit PA
5
DDR select the pin
function as follows.
16-bit timer channel 1
settings
(1) in table below
(2) in table below
PA
5
DDR
--
0
1
1
NDER5
--
--
0
1
Pin function
TIOCB
1
output
PA
5
input
PA
5
output
TP
5
output
TIOCB
1
input*
Note: * TIOCB
1
input when IOB2 = 1 and PWM1 = 0.
16-bit timer channel 1
settings
(2)
(1)
(2)
IOB2
0
1
IOB1
0
0
1
--
IOB0
0
1
--
--
266
Pin
Pin Functions and Selection Method
PA
4
/TP
4
/
TIOCA
1
Bit PWM1 in TMDR, bits IOA2 to IOA0 in TIOR1, bit NDER4 in NDERA, and bit PA
4
DDR select the pin
function as follows.
16-bit timer channel 1
settings
(1) in table below
(2) in table below
PA
4
DDR
--
0
1
1
NDER4
--
--
0
1
Pin function
TIOCA
1
output
PA
4
input
PA
4
output
TP
4
output
TIOCA
1
input*
Note: * TIOCA
1
input when IOA2 = 1.
16-bit timer channel 1
settings
(2)
(1)
(2)
(1)
PWM1
0
1
IOA2
0
1
--
IOA1
0
0
1
--
--
IOA0
0
1
--
--
--

267
Table 8.13
Port A Pin Functions (Modes 3, 4)
Pin
Pin Functions and Selection Method
PA
7
/TP
7
/
Always used as A
20
output.
TIOCB
2
/ A
20
Pin function
A
20
output
PA
6
/TP
6
/
TIOCA
2
/A
21
Bit PWM2 in TMDR, bits IOA2 to IOA0 in TIOR2, bit NDER6 in NDERA, bit A21E in BRCR, and bit PA
6
DDR
select the pin function as follows.
A21E
1
0
16-bit timer channel 2
settings
(1) in table below
(2) in table below
--
PA
6
DDR
--
0
1
1
--
NDER6
--
--
0
1
--
Pin function
TIOCA
2
output
PA
6
input
PA
6
output
TP
6
output
A
21
output
TIOCA
2
input*
Note: * TIOCA
2
input when IOA2 = 1.
16-bit timer channel 2 settings
(2)
(1)
(2)
(1)
PWM2
0
1
IOA2
0
1
--
IOA1
0
0
1
--
--
IOA0
0
1
--
--
--
PA
5
/TP
5
/
TIOCB
1
/A
22
Bit PWM1 in TMDR, bits IOB2 to IOB0 in TIOR1, bit NDER5 in NDERA, bit A22E in BRCR, and bit PA
5
DDR
select the pin function as follows.
A22E
1
0
16-bit timer channel 1
settings
(1) in table below
(2) in table below
--
PA
5
DDR
--
0
1
1
--
NDER5
--
--
0
1
--
Pin function
TIOCB
1
output
PA
5
input
PA
5
output
TP
5
output
A
22
output
TIOCB
1
input*
Note: * TIOCB
1
input when IOB2 = 1 and PWM1 = 0.
16-bit timer channel 1
settings
(2)
(1)
(2)
IOB2
0
1
IOB1
0
0
1
--
IOB0
0
1
--
--
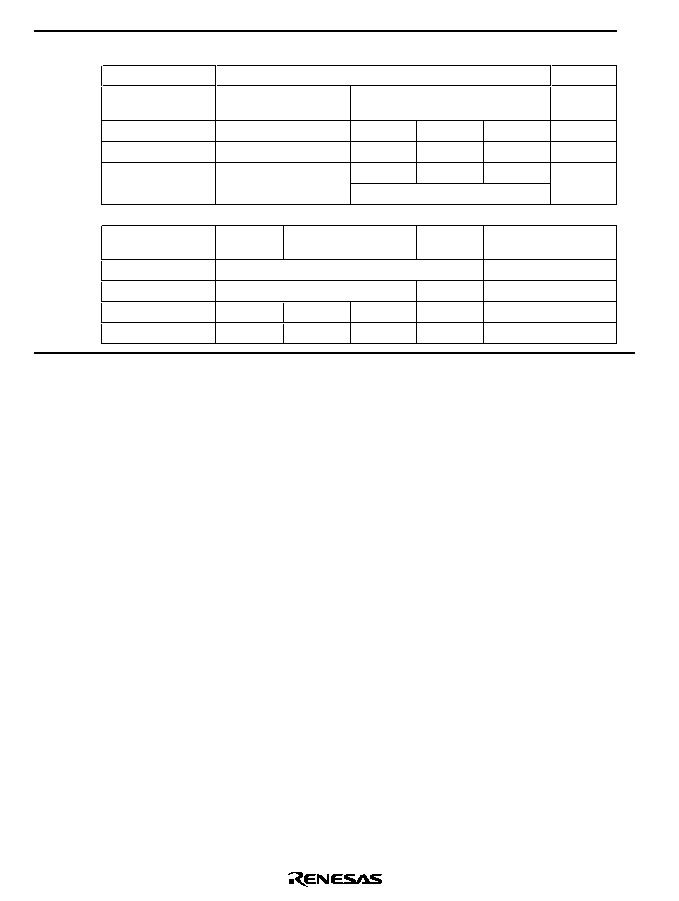
268
Pin
Pin Functions and Selection Method
PA
4
/TP
4
/
TIOCA
1
/A
23
Bit PWM1 in TMDR, bits IOA2 to IOA0 in TIOR1, bit NDER4 in NDERA, bit A23E in BRCR, and bit PA
4
DDR
select the pin function as follows.
A23E
1
0
16-bit timer channel 1
settings
(1) in table below
(2) in table below
--
PA
4
DDR
--
0
1
1
--
NDER4
--
--
0
1
--
Pin function
TIOCA
1
output
PA
4
input
PA
4
output
TP
4
output
A
23
output
TIOCA
1
input*
Note: * TIOCA
1
input when IOA2 = 1.
16-bit timer channel 1
settings
(2)
(1)
(2)
(1)
PWM1
0
1
IOA2
0
1
--
IOA1
0
0
1
--
--
IOA0
0
1
--
--
--
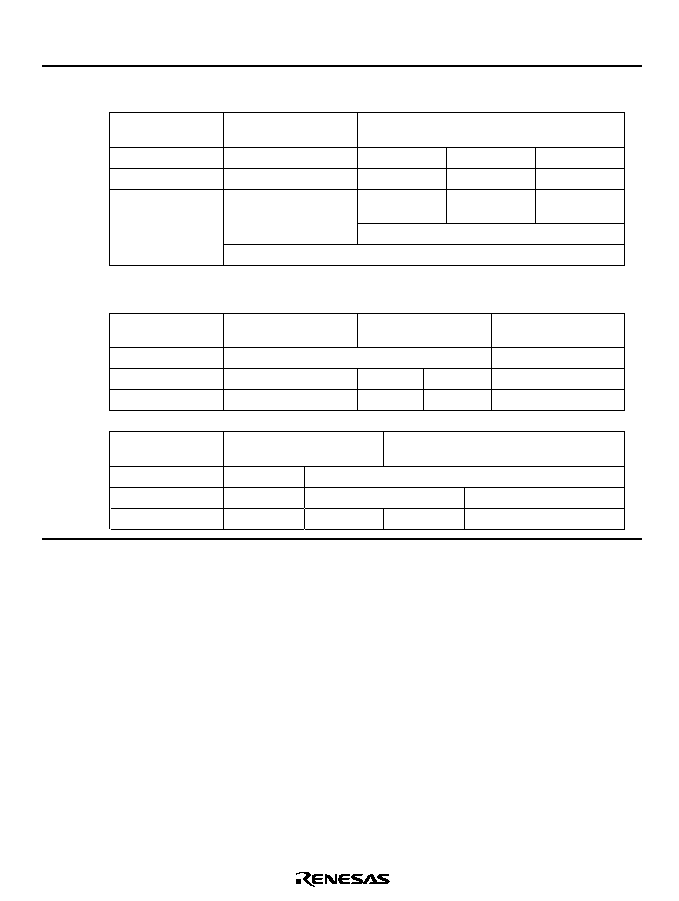
269
Table 8.14
Port A Pin Functions (Modes 1 to 4)
Pin
Pin Functions and Selection Method
PA
3
/TP
3
/
TIOCB
0
/
TCLKD
Bit PWM0 in TMDR, bits IOB2 to IOB0 in TIOR0, bits TPSC2 to TPSC0 in TCR2 to TCR0 of the 16-bit timer,
bits CKS2 to CKS0 in TCR3 of the 8-bit timer, bit NDER3 in NDERA, and bit PA
3
DDR select the pin function
as follows.
16-bit timer channel 0
settings
(1) in table below
(2) in table below
PA
3
DDR
--
0
1
1
NDER3
--
--
0
1
Pin function
TIOCB
0
output
PA
3
input
PA
3
output
TP
3
output
TIOCB
0
input*
1
TCLKD input*
2
Notes:
1.
TIOCB
0
input when IOB2 = 1 and PWM0 = 0.
2.
TCLKD input when TPSC2 = TPSC1 = TPSC0 = 1 in any of TCR2 to TCR0, or bits CKS2 to
CKS0 in TCR3 are as shown in (3) in the table below.
16-bit timer channel 0
settings
(2)
(1)
(2)
IOB2
0
1
IOB1
0
0
1
--
IOB0
0
1
--
--
8-bit timer channel 0
settings
(4)
(3)
CKS2
0
1
CKS1
--
0
1
CKS0
--
0
1
--
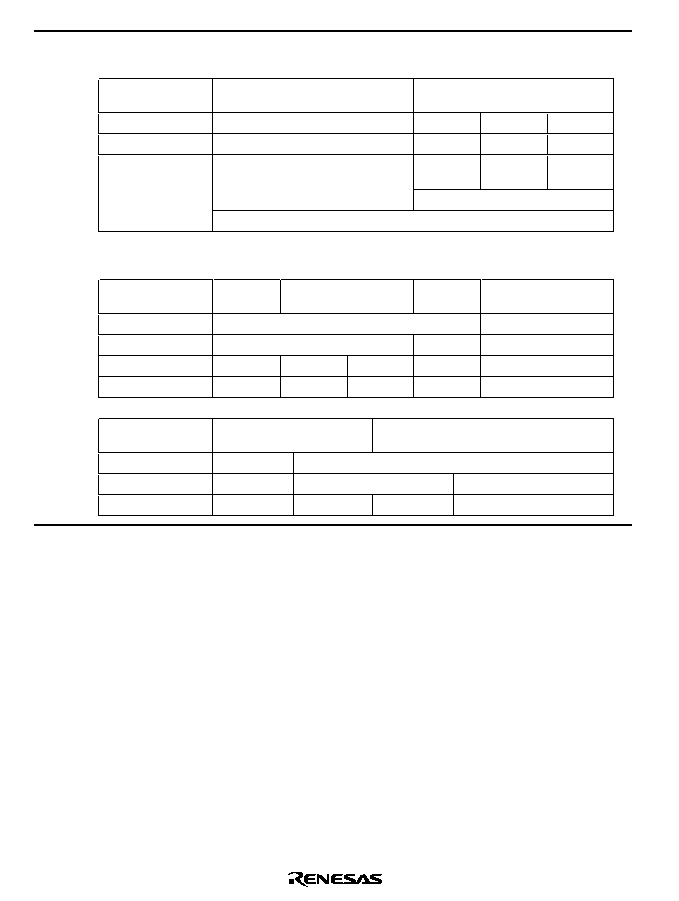
270
Pin
Pin Functions and Selection Method
PA
2
/TP
2
/
TIOCA
0
/
TCLKC
Bit PWM0 in TMDR, bits IOA2 to IOA0 in TIOR0, bits TPSC2 to TPSC0 in TCR2 to TCR0 of the 16-bit timer,
bits CKS2 to CKS0 in TCR1 of the 8-bit timer, bit NDER2 in NDERA, and bit PA
2
DDR select the pin function
as follows.
16-bit timer channel 0
settings
(1) in table below
(2) in table below
PA
2
DDR
--
0
1
1
NDER2
--
--
0
1
Pin function
TIOCA
0
output
PA
2
input
PA
2
output
TP
2
output
TIOCA
0
input*
1
TCLKC input*
2
Notes:
1.
TIOCA
0
input when IOA2 = 1.
2.
TCLKC input when TPSC2 = TPSC1 = 1 and TPSC0 = 0 in any of TCR2 to TCR0, or bits
CKS2 to CKS0 in TCR1 are as shown in (3) in the table below.
16-bit timer channel 0
settings
(2)
(1)
(2)
(1)
PWM0
0
1
IOA2
0
1
--
IOA1
0
0
1
--
--
IOA0
0
1
--
--
--
8-bit timer channel 1
settings
(4)
(3)
CKS2
0
1
CKS1
--
0
1
CKS0
--
0
1
--

271
Pin
Pin Functions and Selection Method
PA
1
/TP
1
/
TCLKB/
TEND
1
Bit MDF in TMDR, bits TPSC2 to TPSC0 in TCR2 to TCR0 of the 16-bit timer, bits CKS2 to CKS0 in TCR2 of
the 8-bit timer, bit NDER1 in NDERA, and bit PA
1
DDR select the pin function as follows.
PA
1
DDR
0
1
1
NDER1
--
0
1
Pin function
PA
1
input
PA
1
output
TP
1
output
TCLKB input*
1
TEND
1
output*
2
Notes:
1.
TCLKB input when MDF = 1 in TMDR, or TPSC2 = 1, TPSC1 = 0, and TPSC0 = 1 in any of
TCR2 to TCR0, or bits CKS2 to CKS0 in TCR2 are as shown in (1) in the table below.
2.
When an external request is specified as a DMAC activation source,
TEND
1
output regardless
of bits PA
1
DDR and NDER1.
8-bit timer channel 1
settings
(2)
(1)
CKS2
0
1
CKS1
--
0
1
CKS0
--
0
1
--
PA
0
/TP
0
/
TCLKA/
TEND
0
Bit MDF in TMDR, bits TPSC2 to TPSC0 in TCR2 to TCR0 of the 16-bit timer, bits CKS2 to CKS0 in TCR0 of
the 8-bit timer, bit NDER0 in NDERA, and bit PA
0
DDR select the pin function as follows.
PA
0
DDR
0
1
NDER0
--
0
1
Pin function
PA
0
input
PA
0
output
TP
0
output
TCLKA input*
1
TEND
0
output*
2
Notes:
1.
TCLKA input when MDF = 1 in TMDR, or TPSC2 = 1, TPSC1 = 0 and TPSC0 = 0 in any of
TCR2 to TCR0, or bits CKS2 to CKS0 in TCR0 are as shown in (1) in the table below.
2.
When an external request is specified as a DMAC activation source,
TEND
0
output regardless
of bits PA
0
DDR and NDER0.
8-bit timer channel 0
settings
(2)
(1)
CKS2
0
1
CKS1
--
0
1
CKS0
--
0
1
--
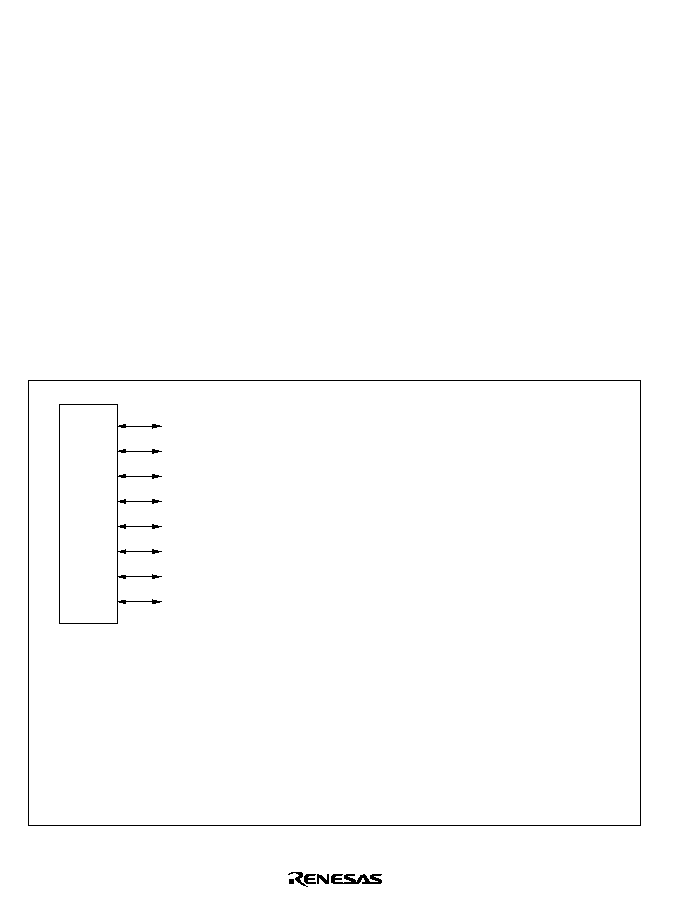
272
8.8
Port B
8.8.1
Overview
Port B is an 8-bit input/output port that is also used for output (TP
15
to TP
8
) from the
programmable timing pattern controller (TPC), input/output (TMIO
3
, TMO
2
, TMIO
1
, TMO
0
) by
the 8-bit timer,
CS
7
to
CS
4
output, input (
DREQ
1
,
DREQ
0
) to the DMA controller (DMAC), input
and output (TxD
2
, RxD
2
, SCK
2
) by serial communication interface channel 2 (SCI2), and output
(
UCAS, LCAS) by the DRAM interface. See table 8.16 for the selection of pin functions.
A reset or hardware standby transition leaves port B as an input port. For output of
CS
7
to
CS
4
in
modes 1 to 4, see section 6.3.4, Chip Select Signals. Pins not assigned to any of these functions are
available for generic input/output. When DRAM is connected to areas 2 to 5, the
CS
4
and
CS
5
output pins function as
RAS output pins for each area. For details see section 6.5, DRAM
Interface. Figure 8.7 shows the pin configuration of port B.
Pins in port B can drive one TTL load and a 30-pF capacitive load. They can also drive darlington
transistor pair.
Port B
PB
7
/TP /RxD
2
15
PB
6
/TP /TxD
2
14
PB
5
/TP /SCK
2
/
LCAS
13
PB
4
/TP /
UCAS
12
PB
3
/TP /TMIO
3
/
DREQ
1
/
CS
4
11
PB
2
/TP /TMO
2
/
CS
5
10
PB
1
/TP /TMIO
1
/
DREQ
0
/
CS
6
9
PB
0
/TP /TMO
0
/
CS
7
8
Port B pins
PB
Pin states in modes 1 to 4
7
(input/output)/TP
15
(output) /RxD
2
(input)
PB
6
(input/output)/TP
14
(output) /TxD
2
(output)
PB
5
(input/output)/TP
13
(output) /SCK
2
(input/output) /
LCAS
(output)
PB
4
(input/output)/TP
12
(output) /
UCAS
(output)
PB
3
(input/output)/TP
11
(output) /TMIO
3
(input/output) /
DREQ
1
(input)
CS
4
(output)
PB
2
(input/output)/TP
10
(output) /TMO
2
(output) /
CS
5
(output)
PB
1
(input/output)/TP
9
(output) /TMIO
1
(input/output) /
DREQ
0
(input) /
CS
6
(output)
PB
0
(input/output)/TP
8
(output) /TMO
0
(output) /
CS
7
(output)
Figure 8.7 Port B Pin Configuration
273
8.8.2
Register Configuration
Table 8.15 summarizes the registers of port B.
Table 8.15
Port B Registers
Address*
Name
Abbreviation
R/W
Initial Value
H'EE00A
Port B data direction register
PBDDR
W
H'00
H'FFFDA
Port B data register
PBDR
R/W
H'00
Note:
*
Lower 20 bits of the address in advanced mode.
Port B Data Direction Register (PBDDR): PBDDR is an 8-bit write-only register that can select
input or output for each pin in port B. When pins are used for TPC output, the corresponding
PBDDR bits must also be set.
Bit
Initial value
Read/Write
7
PB DDR
0
W
Port B data direction 7 to 0
These bits select input or output for port B pins
7
6
PB DDR
0
W
6
5
PB DDR
0
W
5
4
PB DDR
0
W
4
3
PB DDR
0
W
3
2
PB DDR
0
W
2
1
PB DDR
0
W
1
0
PB DDR
0
W
0
When a pin in port B becomes an output port if the corresponding PBDDR bit is set to 1, and an
input port if this bit is cleared to 0.
PBDDR is a write-only register. Its value cannot be read. All bits return 1 when read.
PBDDR is initialized to H'00 by a reset and in hardware standby mode. In software standby mode
it retains its previous setting. When transition is made to software standby mode while a PBDDR
bit is set to 1, the corresponding pin maintains its output state.
274
Port B Data Register (PBDR): PBDR is an 8-bit readable/writable register that stores output data
for pins port B. When port B functions as an output port, the value of this register is output. When
a bit in PBDDR is set to 1, if port B is read the value of the corresponding PBDR bit is returned.
When a bit in PBDDR is cleared to 0, if port B is read the corresponding pin level is read.
Bit
Initial value
Read/Write
0
PB
0
R/W
0
1
PB
0
R/W
1
2
PB
0
R/W
2
3
PB
0
R/W
3
4
PB
0
R/W
4
5
PB
0
R/W
5
6
PB
0
R/W
6
7
PB
0
R/W
7
Port B data 7 to 0
These bits store data for port B pins
PBDR is initialized to H'00 by a reset and in hardware standby mode. In software standby mode it
retains its previous setting.
275
Table 8.16
Port B Pin Functions
Pin
Pin Functions and Selection Method
PB
7
/TP
15
/
RxD
2
Bit RE in SCR of SCI2, bit SMIF in SCMR, bit NDER15 in NDERB, and bit PB
7
DDR select the pin function as
follows.
SMIF
0
1
RE
0
1
--
PB
7
DDR
0
1
1
--
--
NDER15
--
0
1
--
--
Pin function
PB
7
input
PB
7
output
TP
15
output
RxD
2
input
RxD
2
input
PB
6
/TP
14
/
TxD
2
Bit TE in SCR of SCI2, bit SMIF in SCMR, bit NDER14 in NDERB, and bit PB
6
DDR select the pin function as
follows.
SMIF
0
1
TE
0
1
--
PB
6
DDR
0
1
1
--
--
NDER14
--
0
1
--
--
Pin function
PB
6
input
PB
6
output
TP
14
output
TxD
2
output
TxD
2
output*
Note: * Functions as the TxD
2
output pin, but there are two states: one in which the pin is driven, and
another in which the pin is at high-impedance.
PB
5
/TP
13
/
SCK
2
/
LCAS
Bit C/
A
in SMR of SCI2, bits CKE0 and CKE1 in SCR, bit NDER13 in NDERB, and bit PB
5
DDR select the pin
function as follows.
CKE1
0
1
C/
A
0
1
--
CKE0
0
1
--
--
PB
5
DDR
0
1
1
--
--
--
NDER13
--
0
1
--
--
--
Pin function
PB
5
input
PB
5
output
TP
13
output
SCK
2
output
SCK
2
output
SCK
2
input
LCAS
output*
Note: *
LCAS
output depending on bits DRAS2 to DRAS0 in DRCRA and bit CSEL in DRCRB, and
regardless of bits C/
A
, CKE0 and CKE1, NDER13, and PB
5
DDR. For details, see section 6, Bus
Controller.
PB
4
/TP
12
/
Bit NDER12 in NDERB and bit PB
4
DDR select the pin function as follows.
UCAS
PB
4
DDR
0
1
1
NDER12
--
0
1
Pin function
PB
4
input
PB
4
output
TP
12
output
UCAS
output*
Note: *
UCAS
output depending on bits DRAS2 to DRAS0 in DRCRA and bit CSEL in DRCRB, and
regardless of bits NDER12 and PB
4
DDR. For details, see section 6, Bus Controller.

276
Pin
Pin Functions and Selection Method
PB
3
/TP
11
/
TMIO
3
/
DREQ
1
/
CS
4
The DRAM interface settings by bits DRAS2 to DRAS0 in DRCRA, bits OIS3/2 and OS1/0 in TCSR3, bits
CCLR1 and CCLR0 in TCR3, bit CS4E in CSCR, bit NDER11 in NDERB, and bit PB
3
DDR select the pin
function as follows.
DRAM interface
settings
(1) in table below
(2) in table
below
OIS3/2 and OS1/0
All 0
Not all 0
--
CS4E
0
1
--
--
PB
3
DDR
0
1
1
--
--
--
NDER11
--
0
1
--
--
--
Pin function
PB
3
input
PB
3
output
TP
11
output
CS
4
output
TMIO
3
output
CS
4
output*
3
TMIO
3
input*
1
DREQ
1
input*
2
Notes:
1.
TMIO
3
input when CCLR1 = CCLR0 = 1.
2.
When an external request is specified as a DMAC activation source,
DREQ
1
input regardless of
bits OIS3 and OIS2, OS1 and OS0, CCLR1 and CCLR0, CS4E, NDER11, and PB
3
DDR.
3.
CS
4
is output as
RAS
4
.
DRAM interface
settings
(1)
(2)
(1)
DRAS2
0
1
DRAS1
0
1
0
1
DRAS0
0
1
0
1
0
1
0
1
PB
2
/TP
10
/
TMO
2
/
CS
5
The DRAM interface settings by bits DRAS2 to DRAS0 in DRCRA, bits OIS3/2 and OS1/0 in TCSR2, bit
CS5E in CSCR, bit NDER10 in NDERB, and bit PB
2
DDR select the pin function as follows.
DRAM interface
settings
(1) in table below
(2) in table
below
OIS3/2 and OS1/0
All 0
Not all 0
--
CS5E
0
1
--
--
PB
2
DDR
0
1
1
--
--
--
NDER10
--
0
1
--
--
--
Pin function
PB
2
input
PB
2
output
TP
10
output
CS
5
output
TMIO
2
output
CS
5
output*
Note: *
CS
5
is output as
RAS
5
.
DRAM interface
settings
(1)
(2)
(1)
DRAS2
0
1
DRAS1
0
1
0
1
DRAS0
0
1
0
1
0
1
0
1
277
Pin
Pin Functions and Selection Method
PB
1
/TP
9
/
TMIO
1
/
DREQ
0
/
CS
6
Bits OIS3/2 and OS1/0 in TCSR1, bits CCLR1 and CCLR0 in TCR1, bit CS6E in CSCR, bit NDER9 in
NDERB, and bit PB
1
DDR select the pin function as follows.
OIS3/2 and OS1/0
All 0
Not all 0
CS6E
0
1
--
PB
1
DDR
0
1
1
--
--
NDER9
--
0
1
--
--
Pin function
PB
1
input
PB
1
output
TP
9
output
CS
6
output
TMIO
1
output
TMIO
1
input*
1
DREQ
0
input*
2
Notes:
1.
TMIO
1
input when CCLR1 = CCLR0 = 1.
2.
DREQ
0
input when an external request is specified as a DMAC activation source, regardless of
bits OIS3/2, OS1/0, CCLR1/0, CS6E, NDER9, PB
1
DDR.
PB
0
/TP
8
/
TMO
0
/
CS
7
Bits OIS3/2 and OS1/0 in TCSR0, bit CS7E in CSCR, bit NDER8 in NDERB, and bit PB
0
DDR select the pin
function as follows.
OIS3/2 and OS1/0
All 0
Not all 0
CS7E
0
1
--
PB
0
DDR
0
1
1
--
--
NDER8
--
0
1
--
--
Pin function
PB
0
input
PB
0
output
TP
8
output
CS
7
output
TMO
0
output

279
Section 9 16-Bit Timer
9.1
Overview
The H8/3006 and H8/3007 have built-in 16-bit timer module with three 16-bit counter channels.
9.1.1
Features
16-bit timer features are listed below.
∑
Capability to process up to 6 pulse outputs or 6 pulse inputs
∑
Six general registers (GRs, two per channel) with independently-assignable output compare or
input capture functions
∑
Selection of eight counter clock sources for each channel:
Internal clocks:
,
/2,
/4,
/8
External clocks: TCLKA, TCLKB, TCLKC, TCLKD
∑
Five operating modes selectable in all channels:
Waveform output by compare match
Selection of 0 output, 1 output, or toggle output (only 0 or 1 output in channel 2)
Input capture function
Rising edge, falling edge, or both edges (selectable)
Counter clearing function
Counters can be cleared by compare match or input capture
Synchronization
Two or more timer counters (16TCNTs) can be preset simultaneously, or cleared
simultaneously by compare match or input capture. Counter synchronization enables
synchronous register input and output.
PWM mode
PWM output can be provided with an arbitrary duty cycle. With synchronization, up to
three-phase PWM output is possible

280
∑
Phase counting mode selectable in channel 2
Two-phase encoder output can be counted automatically.
∑
High-speed access via internal 16-bit bus
The 16TCNTs and GRs can be accessed at high speed via a 16-bit bus.
∑
Any initial timer output value can be set
∑
Nine interrupt sources
Each channel has two compare match/input capture interrupts and an overflow interrupt. All
interrupts can be requested independently.
∑
Output triggering of programmable timing pattern controller (TPC)
Compare match/input capture signals from channels 0 to 2 can be used as TPC output triggers.
Table 9.1 summarizes the 16-bit timer functions.
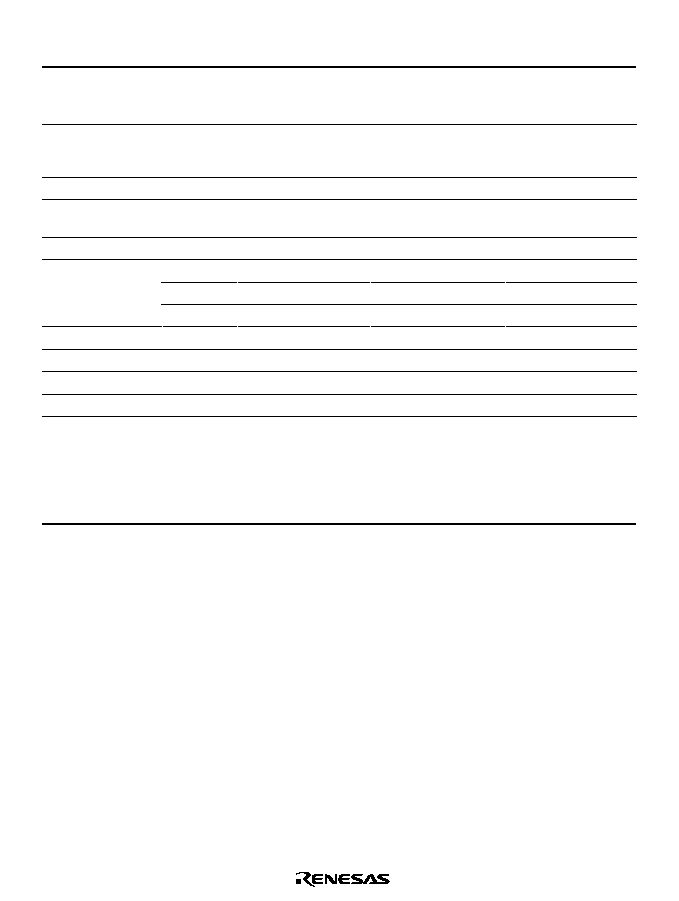
281
Table 9.1
16-bit timer Functions
Item
Channel 0
Channel 1
Channel 2
Clock sources
Internal clocks:
,
/2,
/4,
/8
External clocks: TCLKA, TCLKB, TCLKC, TCLKD, selectable
independently
General registers (output
compare/input
capture registers)
GRA0, GRB0
GRA1, GRB1
GRA2, GRB2
Input/output pins
TIOCA
0
, TIOCB
0
TIOCA
1
, TIOCB
1
TIOCA
2
, TIOCB
2
Counter clearing function
GRA0/GRB0 compare
match or input capture
GRA1/GRB1 compare
match or input capture
GRA2/GRB2 compare
match or input capture
Initial output value setting function
Available
Available
Available
Compare
0
Available
Available
Available
match output
1
Available
Available
Available
Toggle
Available
Available
Not available
Input capture function
Available
Available
Available
Synchronization
Available
Available
Available
PWM mode
Available
Available
Available
Phase counting mode
Not available
Not available
Available
Interrupt sources
Three sources
∑
Compare match/input
capture A0
∑
Compare match/input
capture B0
∑
Overflow
Three sources
∑
Compare match/input
capture A1
∑
Compare match/input
capture B1
∑
Overflow
Three sources
∑
Compare match/input
capture A2
∑
Compare match/input
capture B2
∑
Overflow
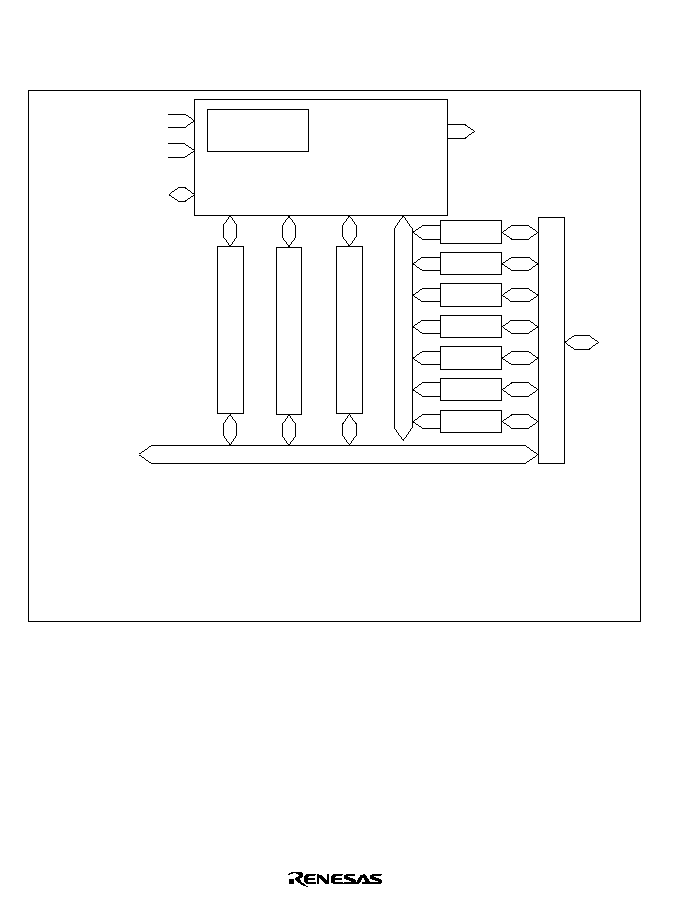
282
9.1.2
Block Diagrams
16-bit timer Block Diagram (Overall): Figure 9.1 is a block diagram of the 16-bit timer.
16-bit timer channel 2
16-bit timer channel 1
16-bit timer channel 0
Module data bus
Bus interface
Internal data bus
IMIA0 to IMIA2
IMIB0 to IMIB2
OVI0 to OVI2
TCLKA to TCLKD
,
/2,
/4,
/8
Clock selector
Control logic
TIOCA
0
to TIOCA
2
TIOCB
0
to TIOCB
2
TSTR
TSNC
TMDR
TOLR
TISRA
TISRB
TISRC
TSTR: Timer start register (8 bits)
TSNC: Timer synchro register (8 bits)
TMDR: Timer mode register (8 bits)
TOLR: Timer output level setting register (8 bits)
TISRA: Timer interrupt status register A (8 bits)
TISRB: Timer interrupt status register B (8 bits)
TISRC: Timer interrupt status register C (8 bits)
Legend
Figure 9.1 16-bit timer Block Diagram (Overall)
283
Block Diagram of Channels 0 and 1: 16-bit timer channels 0 and 1 are functionally identical.
Both have the structure shown in figure 9.2.
Clock selector
Comparator
Control logic
TCLKA to TCLKD
,
/2,
/4,
/8
TIOCA
0
TIOCB
0
IMIA0
IMIB0
OVI0
16TCNT
GRA
GRB
16TCR
TIOR
Module data bus
Legend
16TCNT:
GRA, GRB:
16TCR:
TIOR:
Timer counter (16 bits)
General registers A and B (input capture/output compare registers) (16 bits 2)
Timer control register (8 bits)
Timer I/O control register (8 bits)
◊
Figure 9.2 Block Diagram of Channels 0 and 1

284
Block Diagram of Channel 2: Figure 9.3 is a block diagram of channel 2
Clock selector
Comparator
Control logic
TCLKA to TCLKD
,
/2,
/4,
/8
TIOCA
2
TIOCB
2
IMIA2
IMIB2
OVI2
16TCNT2
GRA2
GRB2
16TCR2
TIOR2
Module data bus
Legend
16TCNT2:
GRA2, GRB2:
16TCR2:
TIOR2:
Timer counter 2 (16 bits)
General registers A2 and B2 (input capture/output compare registers)
(16 bits 2)
Timer control register 2 (8 bits)
Timer I/O control register 2 (8 bits)
◊
Figure 9.3 Block Diagram of Channel 2
285
9.1.3
Pin Configuration
Table 9.2 summarizes the 16-bit timer pins.
Table 9.2
16-bit timer Pins
Channel
Name
Abbre-
viation
Input/
Output
Function
Common Clock input A
TCLKA
Input
External clock A input pin
(phase-A input pin in phase counting mode)
Clock input B
TCLKB
Input
External clock B input pin
(phase-B input pin in phase counting mode)
Clock input C
TCLKC
Input
External clock C input pin
Clock input D
TCLKD
Input
External clock D input pin
0
Input capture/output
compare A0
TIOCA
0
Input/
output
GRA0 output compare or input capture pin
PWM output pin in PWM mode
Input capture/output
compare B0
TIOCB
0
Input/
output
GRB0 output compare or input capture pin
1
Input capture/output
compare A1
TIOCA
1
Input/
output
GRA1 output compare or input capture pin
PWM output pin in PWM mode
Input capture/output
compare B1
TIOCB
1
Input/
output
GRB1 output compare or input capture pin
2
Input capture/output
compare A2
TIOCA
2
Input/
output
GRA2 output compare or input capture pin
PWM output pin in PWM mode
Input capture/output
compare B2
TIOCB
2
Input/
output
GRB2 output compare or input capture pin
286
9.1.4
Register Configuration
Table 9.3 summarizes the 16-bit timer registers.
Table 9.3
16-bit timer Registers
Channel
Address*
1
Name
Abbre-
viation
R/W
Initial
Value
Common
H'FFF60
Timer start register
TSTR
R/W
H'F8
H'FFF61
Timer synchro register
TSNC
R/W
H'F8
H'FFF62
Timer mode register
TMDR
R/W
H'98
H'FFF63
Timer output level setting register
TOLR
W
H'C0
H'FFF64
Timer interrupt status register A
TISRA
R/(W) *
2
H'80
H'FFF65
Timer interrupt status register B
TISRB
R/(W) *
2
H'88
H'FFF66
Timer interrupt status register C
TISRC
R/(W) *
2
H'88
0
H'FFF68
Timer control register 0
16TCR0
R/W
H'80
H'FFF69
Timer I/O control register 0
TIOR0
R/W
H'88
H'FFF6A
Timer counter 0H
16TCNT0H R/W
H'00
H'FFF6B
Timer counter 0L
16TCNT0L
R/W
H'00
H'FFF6C
General register A0H
GRA0H
R/W
H'FF
H'FFF6D
General register A0L
GRA0L
R/W
H'FF
H'FFF6E
General register B0H
GRB0H
R/W
H'FF
H'FFF6F
General register B0L
GRB0L
R/W
H'FF
1
H'FFF70
Timer control register 1
16TCR1
R/W
H'80
H'FFF71
Timer I/O control register 1
TIOR1
R/W
H'88
H'FFF72
Timer counter 1H
16TCNT1H R/W
H'00
H'FFF73
Timer counter 1L
16TCNT1L
R/W
H'00
H'FFF74
General register A1H
GRA1H
R/W
H'FF
H'FFF75
General register A1L
GRA1L
R/W
H'FF
H'FFF76
General register B1H
GRB1H
R/W
H'FF
H'FFF77
General register B1L
GRB1L
R/W
H'FF
287
Channel
Address*
1
Name
Abbre-
viation
R/W
Initial
Value
2
H'FFF78
Timer control register 2
16TCR2
R/W
H'80
H'FFF79
Timer I/O control register 2
TIOR2
R/W
H'88
H'FFF7A
Timer counter 2H
16TCNT2H R/W
H'00
H'FFF7B
Timer counter 2L
16TCNT2L R/W
H'00
H'FFF7C
General register A2H
GRA2H
R/W
H'FF
H'FFF7D
General register A2L
GRA2L
R/W
H'FF
H'FFF7E
General register B2H
GRB2H
R/W
H'FF
H'FFF7F
General register B2L
GRB2L
R/W
H'FF
Notes: 1. The lower 20 bits of the address in advanced mode are indicated.
2. Only 0 can be written in bits 3 to 0, to clear the flags.
288
9.2
Register Descriptions
9.2.1
Timer Start Register (TSTR)
TSTR is an 8-bit readable/writable register that starts and stops the timer counter (16TCNT) in
channels 0 to 2.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
--
1
--
2
STR2
0
R/W
1
STR1
0
R/W
0
STR0
0
R/W
Reserved bits
Counter start 2 to 0
These bits start and
stop 16TCNT2 to 16TCNT0
TSTR is initialized to H'F8 by a reset and in standby mode.
Bits 7 to 3--Reserved: These bits cannot be modified and are always read as 1.
Bit 2--Counter Start 2 (STR2): Starts and stops timer counter 2 (16TCNT2).
Bit 2
STR2
Description
0
16TCNT2 is halted
(Initial value)
1
16TCNT2 is counting
Bit 1--Counter Start 1 (STR1): Starts and stops timer counter 1 (16TCNT1).
Bit 1
STR1
Description
0
16TCNT1 is halted
(Initial value)
1
16TCNT1 is counting
Bit 0--Counter Start 0 (STR0): Starts and stops timer counter 0 (16TCNT0).
Bit 0
STR0
Description
0
16TCNT0 is halted
(Initial value)
1
16TCNT0 is counting
289
9.2.2
Timer Synchro Register (TSNC)
TSNC is an 8-bit readable/writable register that selects whether channels 0 to 2 operate
independently or synchronously. Channels are synchronized by setting the corresponding bits to 1.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
--
1
--
2
SYNC2
0
R/W
1
SYNC1
0
R/W
0
SYNC0
0
R/W
Reserved bits
Timer sync 2 to 0
These bits synchronize
channels 2 to 0
TSNC is initialized to H'F8 by a reset and in standby mode.
Bits 7 to 3--Reserved: These bits cannot be modified and are always read as 1.
Bit 2--Timer Sync 2 (SYNC2): Selects whether channel 2 operates independently or
synchronously.
Bit 2
SYNC2
Description
0
Channel 2's timer counter (16TCNT2) operates independently
(Initial value)
16TCNT2 is preset and cleared independently of other channels
1
Channel 2 operates synchronously
16TCNT2 can be synchronously preset and cleared
Bit 1--Timer Sync 1 (SYNC1): Selects whether channel 1 operates independently or
synchronously.
Bit 1
SYNC1
Description
0
Channel 1's timer counter (16TCNT1) operates independently
(Initial value)
16TCNT1 is preset and cleared independently of other channels
1
Channel 1 operates synchronously
16TCNT1 can be synchronously preset and cleared
290
Bit 0--Timer Sync 0 (SYNC0): Selects whether channel 0 operates independently or
synchronously.
Bit 0
SYNC0
Description
0
Channel 0's timer counter (16TCNT0) operates independently
(Initial value)
16TCNT0 is preset and cleared independently of other channels
1
Channel 0 operates synchronously
16TCNT0 can be synchronously preset and cleared
9.2.3
Timer Mode Register (TMDR)
TMDR is an 8-bit readable/writable register that selects PWM mode for channels 0 to 2. It also
selects phase counting mode and the overflow flag (OVF) setting conditions for channel 2.
Bit
Initial value
Read/Write
7
--
1
--
6
MDF
0
R/W
5
FDIR
0
R/W
4
--
1
--
3
--
1
--
0
PWM0
0
R/W
2
PWM2
0
R/W
1
PWM1
0
R/W
Reserved bit
Reserved bit
PWM mode 2 to 0
These bits select PWM
mode for channels 2 to 0
Phase counting mode flag
Selects phase counting mode for channel 2
Flag direction
Selects the setting condition for the overflow
flag (OVF) in TISRC
TMDR is initialized to H'98 by a reset and in standby mode.
Bit 7--Reserved: This bit cannot be modified and is always read as 1.
Bit 6--Phase Counting Mode Flag (MDF): Selects whether channel 2 operates normally or in
phase counting mode.
Bit 6
MDF
Description
0
Channel 2 operates normally
(Initial value)
1
Channel 2 operates in phase counting mode
291
When MDF is set to 1 to select phase counting mode, 16TCNT2 operates as an up/down-counter
and pins TCLKA and TCLKB become counter clock input pins. 16TCNT2 counts both rising and
falling edges of TCLKA and TCLKB, and counts up or down as follows.
Counting Direction
Down-Counting
Up-Counting
TCLKA pin
High
Low
Low
High
TCLKB pin
Low
High
High
Low
In phase counting mode channel 2 operates as above regardless of the external clock edges
selected by bits CKEG1 and CKEG0 and the clock source selected by bits TPSC2 to TPSC0.
Phase counting mode takes precedence over these settings.
The counter clearing condition selected by the CCLR1 and CCLR0 bits in 16TCR2 and the
compare match/input capture settings and interrupt functions of TIOR2, TISRA, TISRB, TISRC
remain effective in phase counting mode.
Bit 5--Flag Direction (FDIR): Designates the setting condition for the OVF flag in TISRC. The
FDIR designation is valid in all modes in channel 2.
Bit 5
FDIR
Description
0
OVF is set to 1 in TISRC when 16TCNT2 overflows or underflows
(Initial value)
1
OVF is set to 1 in TISRC when 16TCNT2 overflows
Bits 4 and 3--Reserved: These bits cannot be modified and are always read as 1.
Bit 2--PWM Mode 2 (PWM2): Selects whether channel 2 operates normally or in PWM mode.
Bit 2
PWM2
Description
0
Channel 2 operates normally
(Initial value)
1
Channel 2 operates in PWM mode
When bit PWM2 is set to 1 to select PWM mode, pin TIOCA
2
becomes a PWM output pin. The
output goes to 1 at compare match with GRA2, and to 0 at compare match with GRB2.
292
Bit 1--PWM Mode 1 (PWM1): Selects whether channel 1 operates normally or in PWM mode.
Bit 1
PWM1
Description
0
Channel 1 operates normally
(Initial value)
1
Channel 1 operates in PWM mode
When bit PWM1 is set to 1 to select PWM mode, pin TIOCA
1
becomes a PWM output pin. The
output goes to 1 at compare match with GRA1, and to 0 at compare match with GRB1.
Bit 0--PWM Mode 0 (PWM0): Selects whether channel 0 operates normally or in PWM mode.
Bit 0
PWM0
Description
0
Channel 0 operates normally
(Initial value)
1
Channel 0 operates in PWM mode
When bit PWM0 is set to 1 to select PWM mode, pin TIOCA
0
becomes a PWM output pin. The
output goes to 1 at compare match with GRA0, and to 0 at compare match with GRB0.
9.2.4
Timer Interrupt Status Register A (TISRA)
TISRA is an 8-bit readable/writable register that indicates GRA compare match or input capture
and enables or disables general register compare match and input capture interrupt requests.
293
7
--
1
--
Bit
Initial value
Read/Write
6
IMIEA2
0
R/W
5
IMIEA1
0
R/W
4
IMIEA0
0
R/W
3
--
1
--
2
IMFA2
0
R/(W)*
1
IMFA1
0
R/(W)*
0
IMFA0
0
R/(W)*
Reserved bit
Reserved bit
Input capture/compare match interrupt enable A2 to A0
These bits enable or disable interrupts by the IMFA flags
Input capture/compare match
flags A2 to A0
Status flags indicating GRA
compare match or input capture
Note: * Only 0 can be written, to clear the flag.
TISRA is initialized to H'88 by a reset and in standby mode.
Bit 7--Reserved: This bit cannot be modified and is always read as 1.
Bit 6--Input Capture/Compare Match Interrupt Enable A2 (IMIEA2): Enables or disables
the interrupt requested by the IMFA2 flag when IMFA2 is set to 1.
Bit 6
IMIEA2
Description
0
IMIA2 interrupt requested by IMFA2 flag is disabled
(Initial value)
1
IMIA2 interrupt requested by IMFA2 flag is enabled
Bit 5--Input Capture/Compare Match Interrupt Enable A1 (IMIEA1): Enables or disables
the interrupt requested by the IMFA1 flag when IMFA1 is set to 1.
Bit 5
IMIEA1
Description
0
IMIA1 interrupt requested by IMFA1 flag is disabled
(Initial value)
1
IMIA1 interrupt requested by IMFA1 flag is enabled

294
Bit 4--Input Capture/Compare Match Interrupt Enable A0 (IMIEA0): Enables or disables
the interrupt requested by the IMFA0 flag when IMFA0 is set to 1.
Bit 4
IMIEA0
Description
0
IMIA0 interrupt requested by IMFA0 flag is disabled
(Initial value)
1
IMIA0 interrupt requested by IMFA0 flag is enabled
Bit 3--Reserved: This bit cannot be modified and is always read as 1.
Bit 2--Input Capture/Compare Match Flag A2 (IMFA2): This status flag indicates GRA2
compare match or input capture events.
Bit 2
IMFA2
Description
0
[Clearing conditions]
(Initial value)
∑
Read IMFA2 when IMFA2 =1, then write 0 in IMFA2.
∑
DMAC activated by IMIA2 interrupt.
1
[Setting conditions]
∑
16TCNT2 = GRA2 when GRA2 functions as an output compare register.
∑
16TCNT2 value is transferred to GRA2 by an input capture signal when GRA2
functions as an input capture register.
Bit 1--Input Capture/Compare Match Flag A1 (IMFA1): This status flag indicates GRA1
compare match or input capture events.
Bit 1
IMFA1
Description
0
[Clearing conditions]
(Initial value)
∑
Read IMFA1 when IMFA1 =1, then write 0 in IMFA1.
∑
DMAC activated by IMIA1 interrupt.
1
[Setting conditions]
∑
16TCNT1 = GRA1 when GRA1 functions as an output compare register.
∑
16TCNT1 value is transferred to GRA1 by an input capture signal when GRA1
functions as an input capture register.

295
Bit 0--Input Capture/Compare Match Flag A0 (IMFA0): This status flag indicates GRA0
compare match or input capture events.
Bit 0
IMFA0
Description
0
[Clearing conditions]
(Initial value)
∑
Read IMFA0 when IMFA0 =1, then write 0 in IMFA0.
∑
DMAC activated by IMIA0 interrupt.
1
[Setting conditions]
∑
16TCNT0 = GRA0 when GRA0 functions as an output compare register.
∑
16TCNT0 value is transferred to GRA0 by an input capture signal when GRA0
functions as an input capture register.
9.2.5
Timer Interrupt Status Register B (TISRB)
TISRB is an 8-bit readable/writable register that indicates GRB compare match or input capture
and enables or disables general register compare match and input capture interrupt requests.
7
--
1
--
Bit
Initial value
Read/Write
6
IMIEB2
0
R/W
5
IMIEB1
0
R/W
4
IMIEB0
0
R/W
3
--
1
--
2
IMFB2
0
R/(W)*
1
IMFB1
0
R/(W)*
0
IMFB0
0
R/(W)*
Reserved bit
Reserved bit
Input capture/compare match interrupt enable B2 to B0
These bits enable or disable interrupts by the IMFB flags
Input capture/compare match
flags B2 to B0
Status flags indicating GRB
compare match or input capture
Note: * Only 0 can be written, to clear the flag.
TISRB is initialized to H'88 by a reset and in standby mode.
Bit 7--Reserved: This bit cannot be modified and is always read as 1.
296
Bit 6--Input Capture/Compare Match Interrupt Enable B2 (IMIEB2): Enables or disables
the interrupt requested by the IMFB2 flag when IMFB2 is set to 1.
Bit 6
IMIEB2
Description
0
IMIB2 interrupt requested by IMFB2 flag is disabled
(Initial value)
1
IMIB2 interrupt requested by IMFB2 flag is enabled
Bit 5--Input Capture/Compare Match Interrupt Enable B1 (IMIEB1): Enables or disables
the interrupt requested by the IMFB1 flag when IMFB1 is set to 1.
Bit 5
IMIEB1
Description
0
IMIB1 interrupt requested by IMFB1 flag is disabled
(Initial value)
1
IMIB1 interrupt requested by IMFB1 flag is enabled
Bit 4--Input Capture/Compare Match Interrupt Enable B0 (IMIEB0): Enables or disables
the interrupt requested by the IMFB0 flag when IMFB0 is set to 1.
Bit 4
IMIEB0
Description
0
IMIB0 interrupt requested by IMFB0 flag is disabled
(Initial value)
1
IMIB0 interrupt requested by IMFB0 flag is enabled
Bit 3--Reserved: This bit cannot be modified and is always read as 1.
Bit 2--Input Capture/Compare Match Flag B2 (IMFB2): This status flag indicates GRB2
compare match or input capture events.
Bit 2
IMFB2
Description
0
[Clearing condition]
(Initial value)
Read IMFB2 when IMFB2 =1, then write 0 in IMFB2.
1
[Setting conditions]
∑
16TCNT2 = GRB2 when GRB2 functions as an output compare register.
∑
16TCNT2 value is transferred to GRB2 by an input capture signal when GRB2
functions as an input capture register.

297
Bit 1--Input Capture/Compare Match Flag B1 (IMFB1): This status flag indicates GRB1
compare match or input capture events.
Bit 1
IMFB1
Description
0
[Clearing condition]
(Initial value)
Read IMFB1 when IMFB1 =1, then write 0 in IMFB1.
1
[Setting conditions]
∑
16TCNT1 = GRB1 when GRB1 functions as an output compare register.
∑
16TCNT1 value is transferred to GRB1 by an input capture signal when GRB1
functions as an input capture register.
Bit 0--Input Capture/Compare Match Flag B0 (IMFB0): This status flag indicates GRB0
compare match or input capture events.
Bit 0
IMFB0
Description
0
[Clearing condition]
(Initial value)
Read IMFB0 when IMFB0 =1, then write 0 in IMFB0.
1
[Setting conditions]
∑
16TCNT0 = GRB0 when GRB0 functions as an output compare register.
∑
16TCNT0 value is transferred to GRB0 by an input capture signal when GRB0
functions as an input capture register.
298
9.2.6
Timer Interrupt Status Register C (TISRC)
TISRC is an 8-bit readable/writable register that indicates 16TCNT overflow or underflow and
enables or disables overflow interrupt requests.
7
--
1
--
Bit
Initial value
Read/Write
6
OVIE2
0
R/W
5
OVIE1
0
R/W
4
OVIE0
0
R/W
3
--
1
--
2
OVF2
0
R/(W)*
1
OVF1
0
R/(W)*
0
OVF0
0
R/(W)*
Reserved bit
Reserved bit
Overflow interrupt enable 2 to 0
These bits enable or disable interrupts by the OVF flags
Overflow flags 2 to 0
Status flags indicating overflow
or underflow
Note: * Only 0 can be written, to clear the flag.
TISRC is initialized to H'88 by a reset and in standby mode.
Bit 7--Reserved: This bit cannot be modified and is always read as 1.
Bit 6--Overflow Interrupt Enable 2 (OVIE2): Enables or disables the interrupt requested by the
OVF2 flag when OVF2 is set to 1.
Bit 6
OVIE2
Description
0
OVI2 interrupt requested by OVF2 flag is disabled
(Initial value)
1
OVI2 interrupt requested by OVF2 flag is enabled
Bit 5--Overflow Interrupt Enable 1 (OVIE1): Enables or disables the interrupt requested by the
OVF1 flag when OVF1 is set to 1.
Bit 5
OVIE1
Description
0
OVI1 interrupt requested by OVF1 flag is disabled
(Initial value)
1
OVI1 interrupt requested by OVF1 flag is enabled
299
Bit 4--Overflow Interrupt Enable 0 (OVIE0): Enables or disables the interrupt requested by the
OVF0 flag when OVF0 is set to 1.
Bit 4
OVIE0
Description
0
OVI0 interrupt requested by OVF0 flag is disabled
(Initial value)
1
OVI0 interrupt requested by OVF0 flag is enabled
Bit 3--Reserved: This bit cannot be modified and is always read as 1.
Bit 2--Overflow Flag 2 (OVF2): This status flag indicates 16TCNT2 overflow.
Bit 2
OVF2
Description
0
[Clearing condition]
(Initial value)
Read OVF2 when OVF2 =1, then write 0 in OVF2.
1
[Setting condition]
16TCNT2 overflowed from H'FFFF to H'0000, or underflowed from H'0000 to H'FFFF.
Note:
16TCNT underflow occurs when 16TCNT operates as an up/down-counter. Underflow
occurs only when channel 2 operates in phase counting mode (MDF = 1 in TMDR).
Bit 1--Overflow Flag 1 (OVF1): This status flag indicates 16TCNT1 overflow.
Bit 1
OVF1
Description
0
[Clearing condition]
(Initial value)
Read OVF1 when OVF1 =1, then write 0 in OVF1.
1
[Setting condition]
16TCNT1 overflowed from H'FFFF to H'0000.
Bit 0--Overflow Flag 0 (OVF0): This status flag indicates 16TCNT0 overflow.
Bit 0
OVF0
Description
0
[Clearing condition]
(Initial value)
Read OVF0 when OVF0 =1, then write 0 in OVF0.
1
[Setting condition]
16TCNT0 overflowed from H'FFFF to H'0000.
300
9.2.7
Timer Counters (16TCNT)
16TCNT is a 16-bit counter. The 16-bit timer has three 16TCNTs, one for each channel.
Channel
Abbreviation
Function
0
16TCNT0
Up-counter
1
16TCNT1
2
16TCNT2
Phase counting mode: up/down-counter
Other modes: up-counter
Bit
Initial value
Read/Write
14
0
R/W
12
0
R/W
10
0
R/W
8
0
R/W
6
0
R/W
0
0
R/W
4
0
R/W
2
0
R/W
15
0
R/W
13
0
R/W
11
0
R/W
9
0
R/W
7
0
R/W
1
0
R/W
5
0
R/W
3
0
R/W
Each 16TCNT is a 16-bit readable/writable register that counts pulse inputs from a clock source.
The clock source is selected by bits TPSC2 to TPSC0 in 16TCR.
16TCNT0 and 16TCNT1 are up-counters. 16TCNT2 is an up/down-counter in phase counting
mode and an up-counter in other modes.
16TCNT can be cleared to H'0000 by compare match with GRA or GRB or by input capture to
GRA or GRB (counter clearing function).
When 16TCNT overflows (changes from H'FFFF to H'0000), the OVF flag is set to 1 in TISRC of
the corresponding channel.
When 16TCNT underflows (changes from H'0000 to H'FFFF), the OVF flag is set to 1 in TISRC
of the corresponding channel.
The 16TCNTs are linked to the CPU by an internal 16-bit bus and can be written or read by either
word access or byte access.
Each 16TCNT is initialized to H'0000 by a reset and in standby mode.
301
9.2.8
General Registers (GRA, GRB)
The general registers are 16-bit registers. The 16-bit timer has 6 general registers, two in each
channel.
Channel
Abbreviation
Function
0
GRA0, GRB0
Output compare/input capture register
1
GRA1, GRB1
2
GRA2, GRB2
Bit
Initial value
Read/Write
14
1
R/W
12
1
R/W
10
1
R/W
8
1
R/W
6
1
R/W
0
1
R/W
4
1
R/W
2
1
R/W
15
1
R/W
13
1
R/W
11
1
R/W
9
1
R/W
7
1
R/W
1
1
R/W
5
1
R/W
3
1
R/W
A general register is a 16-bit readable/writable register that can function as either an output
compare register or an input capture register. The function is selected by settings in TIOR.
When a general register is used as an output compare register, its value is constantly compared
with the 16TCNT value. When the two values match (compare match), the IMFA or IMFB flag is
set to 1 in TISRA/TISRB. Compare match output can be selected in TIOR.
When a general register is used as an input capture register, rising edges, falling edges, or both
edges of an external input capture signal are detected and the current 16TCNT value is stored in
the general register. The corresponding IMFA or IMFB flag in TISRA/TISRB is set to 1 at the
same time. The valid edge or edges of the input capture signal are selected in TIOR.
TIOR settings are ignored in PWM mode.
General registers are linked to the CPU by an internal 16-bit bus and can be written or read by
either word access or byte access.
General registers are initialized to the output compare function (with no output signal) by a reset
and in standby mode. The initial value is H'FFFF.

302
9.2.9
Timer Control Registers (16TCR)
16TCR is an 8-bit register. The 16-bit timer has three 16TCRs, one in each channel.
Channel
Abbreviation
Function
0
16TCR0
CR controls the timer counter. The 16TCRs in all channels are
1
16TCR1
functionally identical. When phase counting mode is
2
16TCR2
selected in channel 2, the settings of bits CKEG1 and
CKEG0 and TPSC2 to TPSC0 in 16TCR2 are ignored.
Bit
Initial value
Read/Write
7
--
1
--
6
CCLR1
0
R/W
5
CCLR0
0
R/W
4
CKEG1
0
R/W
3
CKEG0
0
R/W
0
TPSC0
0
R/W
2
TPSC2
0
R/W
1
TPSC1
0
R/W
Timer prescaler 2 to 0
These bits select the
counter clock
Reserved bit
Clock edge 1/0
These bits select external clock edges
Counter clear 1/0
These bits select the counter clear source
Each 16TCR is an 8-bit readable/writable register that selects the timer counter clock source,
selects the edge or edges of external clock sources, and selects how the counter is cleared.
16TCR is initialized to H'80 by a reset and in standby mode.
Bit 7--Reserved: This bit cannot be modified and is always read as 1.
303
Bits 6 and 5--Counter Clear 1/0 (CCLR1, CCLR0): These bits select how 16TCNT is cleared.
Bit 6
CCLR1
Bit 5
CCLR0
Description
0
0
16TCNT is not cleared
(Initial value)
1
16TCNT is cleared by GRA compare match or input capture*
1
1
0
16TCNT is cleared by GRB compare match or input capture*
1
1
Synchronous clear: 16TCNT is cleared in synchronization with other
synchronized timers*
2
Notes: 1. 16TCNT is cleared by compare match when the general register functions as an output
compare register, and by input capture when the general register functions as an input
capture register.
2. Selected in TSNC.
Bits 4 and 3--Clock Edge 1/0 (CKEG1, CKEG0): These bits select external clock input edges
when an external clock source is used.
Bit 4
CKEG1
Bit 3
CKEG0
Description
0
0
Count rising edges
(Initial value)
1
Count falling edges
1
--
Count both edges
When channel 2 is set to phase counting mode, bits CKEG1 and CKEG0 in 16TCR2 are ignored.
Phase counting takes precedence.

304
Bits 2 to 0--Timer Prescaler 2 to 0 (TPSC2 to TPSC0): These bits select the counter clock
source.
Bit 2
TPSC2
Bit 1
TPSC1
Bit 0
TPSC0
Function
0
0
0
Internal clock:
(Initial value)
1
Internal clock:
/2
1
0
Internal clock:
/4
1
Internal clock:
/8
1
0
0
External clock A: TCLKA input
1
External clock B: TCLKB input
1
0
External clock C: TCLKC input
1
External clock D: TCLKD input
When bit TPSC2 is cleared to 0 an internal clock source is selected, and the timer counts only
falling edges. When bit TPSC2 is set to 1 an external clock source is selected, and the timer counts
the edge or edges selected by bits CKEG1 and CKEG0.
When channel 2 is set to phase counting mode (MDF = 1 in TMDR), the settings of bits TPSC2 to
TPSC0 in 16TCR2 are ignored. Phase counting takes precedence.
9.2.10
Timer I/O Control Register (TIOR)
TIOR is an 8-bit register. The 16-bit timer has three TIORs, one in each channel.
Channel
Abbreviation
Function
0
TIOR0
TIOR controls the general registers. Some functions differ in PWM
1
TIOR1
mode.
2
TIOR2
305
Bit
Initial value
Read/Write
7
--
1
--
6
IOB2
0
R/W
5
IOB1
0
R/W
4
IOB0
0
R/W
3
--
1
--
0
IOA0
0
R/W
2
IOA2
0
R/W
1
IOA1
0
R/W
I/O control A2 to A0
These bits select GRA
functions
Reserved bit
I/O control B2 to B0
These bits select GRB functions
Reserved bit
Each TIOR is an 8-bit readable/writable register that selects the output compare or input capture
function for GRA and GRB, and specifies the functions of the TIORA and TIORC pins. If the
output compare function is selected, TIOR also selects the type of output. If input capture is
selected, TIOR also selects the edge or edges of the input capture signal.
TIOR is initialized to H'88 by a reset and in standby mode.
Bit 7--Reserved: This bit cannot be modified and is always read as 1.
Bits 6 to 4--I/O Control B2 to B0 (IOB2 to IOB0): These bits select the GRB function.
Bit 6
IOB2
Bit 5
IOB1
Bit 4
IOB0
Function
0
0
0
GRB is an output
No output at compare match
(Initial value)
1
compare register
0 output at GRB compare match*
1
1
0
1 output at GRB compare match*
1
1
Output toggles at GRB compare match
(1 output in channel 2)*
1
, *
2
1
0
0
GRB is an input
GRB captures rising edge of input
1
compare register
GRB captures falling edge of input
1
0
GRB captures both edges of input
1
Notes: 1. After a reset, the output conforms to the TOLR setting until the first compare match.
2. Channel 2 output cannot be toggled by compare match. This setting selects 1 output
instead.
306
Bit 3--Reserved: This bit cannot be modified and is always read as 1.
Bits 2 to 0--I/O Control A2 to A0 (IOA2 to IOA0): These bits select the GRA function.
Bit 2
IOA2
Bit 1
IOA1
Bit 0
IOA0
Function
0
0
0
GRA is an output
No output at compare match
(Initial value)
1
compare register
0 output at GRA compare match*
1
1
0
1 output at GRA compare match*
1
1
Output toggles at GRA compare match
(1 output in channel 2)*
1
, *
2
1
0
0
GRA is an input
GRA captures rising edge of input
1
compare register
GRA captures falling edge of input
1
0
GRA captures both edges of input
1
Notes: 1. After a reset, the output conforms to the TOLR setting until the first compare match.
2. Channel 2 output cannot be toggled by compare match. This setting selects 1 output
instead.
9.2.11
Timer Output Level Setting Register C (TOLR)
TOLR is an 8-bit write-only register that selects the timer output level for channels 0 to 2.
7
--
1
--
Bit
Initial value
Read/Write
6
--
1
--
5
TOB2
0
W
4
TOA2
0
W
3
TOB1
0
W
2
TOA1
0
W
1
TOB0
0
W
0
TOA0
0
W
Reserved bits
Output level setting A2 to A0, B2 to B0
These bits set the levels of the timer outputs
(TIOCA
2
to TIOCA
0
, and TIOCB
2
to TIOCB
0
)
A TOLR setting can only be made when the corresponding bit in TSTR is 0.
TOLR is a write-only register. If it is read, all bits will return a value of 1.
TOLR is initialized to H'C0 by a reset and in standby mode.
Bits 7 and 6--Reserved: These bits cannot be modified.
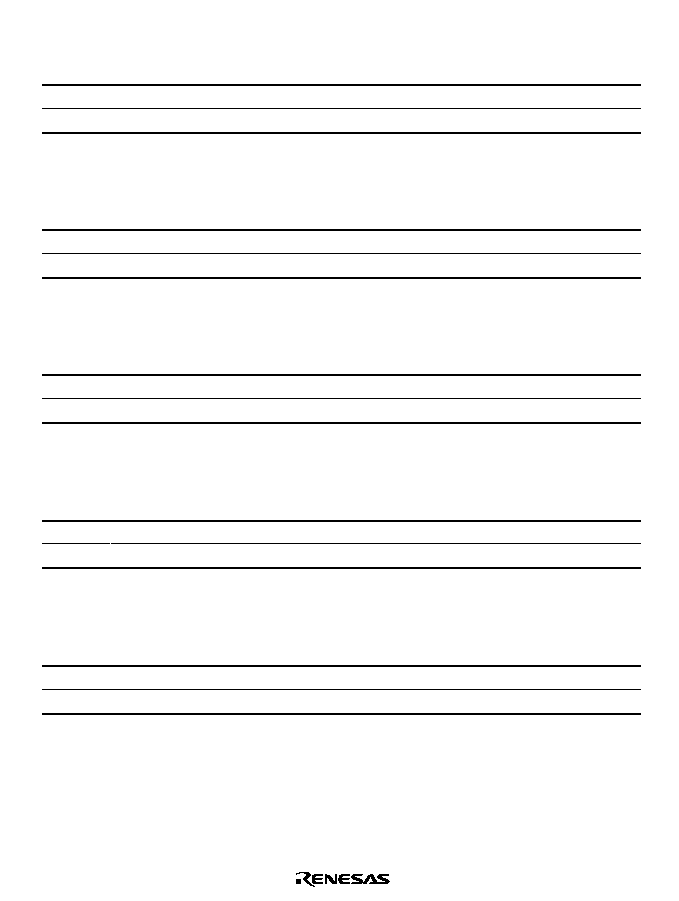
307
Bit 5--Output Level Setting B2 (TOB2): Sets the value of timer output TIOCB
2
.
Bit 5
TOB2
Description
0
TIOCB
2
is 0
(Initial value)
1
TIOCB
2
is 1
Bit 4--Output Level Setting A2 (TOA2): Sets the value of timer output TIOCA
2
.
Bit 4
TOA2
Description
0
TIOCA
2
is 0
(Initial value)
1
TIOCA
2
is 1
Bit 3--Output Level Setting B1 (TOB1): Sets the value of timer output TIOCB
1
.
Bit 3
TOB1
Description
0
TIOCB
1
is 0
(Initial value)
1
TIOCB
1
is 1
Bit 2--Output Level Setting A1 (TOA1): Sets the value of timer output TIOCA
1
.
Bit 2
TOA1
Description
0
TIOCA
1
is 0
(Initial value)
1
TIOCA
1
is 1
Bit 1--Output Level Setting B0 (TOB0): Sets the value of timer output TIOCB
0
.
Bit 0
TOB0
Description
0
TIOCB
0
is 0
(Initial value)
1
TIOCB
0
is 1

308
Bit 0--Output Level Setting A0 (TOA0): Sets the value of timer output TIOCA
0
.
Bit 0
TOA0
Description
0
TIOCA
0
is 0
(Initial value)
1
TIOCA
0
is 1

309
9.3
CPU Interface
9.3.1
16-Bit Accessible Registers
The timer counters (16TCNTs), general registers A and B (GRAs and GRBs) are 16-bit registers,
and are linked to the CPU by an internal 16-bit data bus. These registers can be written or read a
word at a time, or a byte at a time.
Figures 9.4 and 9.5 show examples of word read/write access to a timer counter (16TCNT).
Figures 9.6, 9.7, 9.8, and 9.9 show examples of byte read/write access to 16TCNTH and
16TCNTL.
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCNTH
16TCNTL
Figure 9.4 Access to Timer Counter (CPU Writes to 16TCNT, Word)
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCNTH
16TCNTL
Figure 9.5 Access to Timer Counter (CPU Reads 16TCNT, Word)
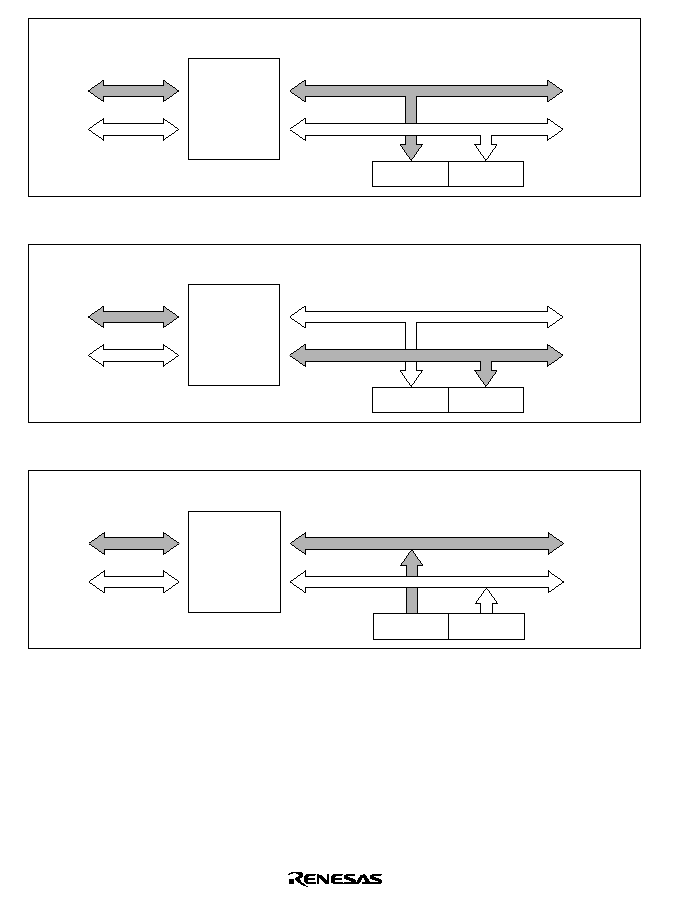
310
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCNTH
16TCNTL
Figure 9.6 Access to Timer Counter (CPU Writes to 16TCNTH, Upper Byte)
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCNTH
16TCNTL
Figure 9.7 Access to Timer Counter (CPU Writes to 16TCNTL, Lower Byte)
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCNTH
16TCNTL
Figure 9.8 Access to Timer Counter (CPU Reads 16TCNTH, Upper Byte)

311
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCNTH
16TCNTL
Figure 9.9 Access to Timer Counter (CPU Reads 16TCNTL, Lower Byte)
9.3.2
8-Bit Accessible Registers
The registers other than the timer counters and general registers are 8-bit registers. These registers
are linked to the CPU by an internal 8-bit data bus.
Figures 9.10 and 9.11 show examples of byte read and write access to a 16TCR.
If a word-size data transfer instruction is executed, two byte transfers are performed.
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCR
Figure 9.10 16TCR Access (CPU Writes to 16TCR)
On-chip data bus
CPU
H
L
Bus interface
H
L
Module
data bus
16TCR
Figure 9.11 16TCR Access (CPU Reads 16TCR)

312
9.4
Operation
9.4.1
Overview
A summary of operations in the various modes is given below.
Normal Operation: Each channel has a timer counter and general registers. The timer counter
counts up, and can operate as a free-running counter, periodic counter, or external event counter.
General registers A and B can be used for input capture or output compare.
Synchronous Operation: The timer counters in designated channels are preset synchronously.
Data written to the timer counter in any one of these channels is simultaneously written to the
timer counters in the other channels as well. The timer counters can also be cleared synchronously
if so designated by the CCLR1 and CCLR0 bits in the 16TCRs.
PWM Mode: A PWM waveform is output from the TIOCA pin. The output goes to 1 at compare
match A and to 0 at compare match B. The duty cycle can be varied from 0% to 100% depending
on the settings of GRA and GRB. When a channel is set to PWM mode, its GRA and GRB
automatically become output compare registers.
Phase Counting Mode: The phase relationship between two clock signals input at TCLKA and
TCLKB is detected and 16TCNT2 counts up or down accordingly. When phase counting mode is
selected TCLKA and TCLKB become clock input pins and 16TCNT2 operates as an up/down-
counter.
9.4.2
Basic Functions
Counter Operation: When one of bits STR0 to STR2 is set to 1 in the timer start register (TSTR),
the timer counter (16TCNT) in the corresponding channel starts counting. The counting can be
free-running or periodic.
∑
Sample setup procedure for counter
Figure 9.12 shows a sample procedure for setting up a counter.
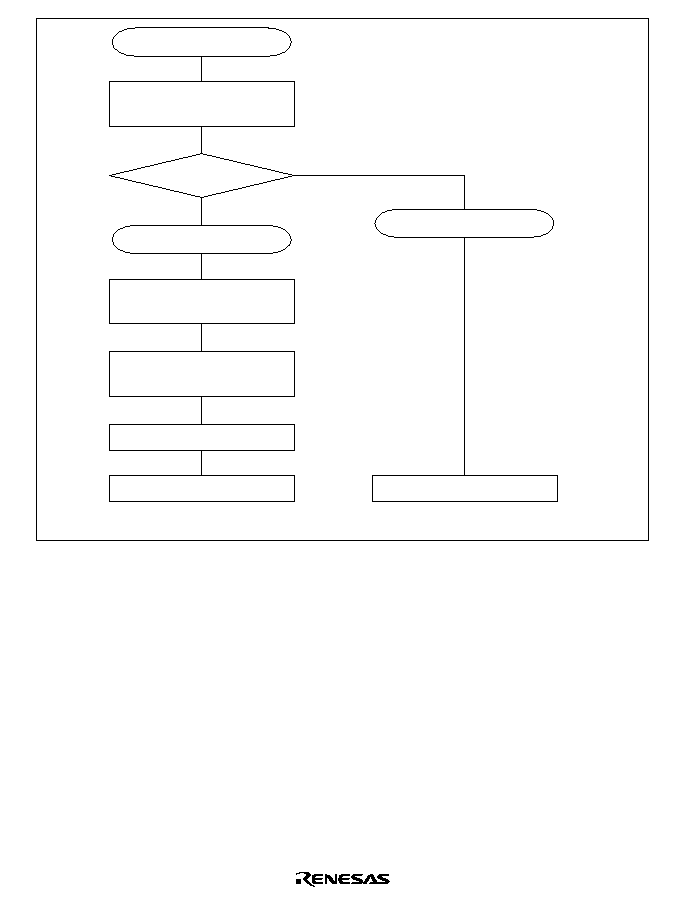
313
Counter setup
Select counter clock
Type of counting?
Periodic counting
Select counter clear source
Select output compare
register function
Set period
Start counter
Free-running counting
Start counter
Periodic counter
Free-running counter
1
Yes
No
2
3
4
5
5
Figure 9.12 Counter Setup Procedure (Example)
1. Set bits TPSC2 to TPSC0 in 16TCR to select the counter clock source. If an external clock
source is selected, set bits CKEG1 and CKEG0 in 16TCR to select the desired edge(s) of the
external clock signal.
2. For periodic counting, set CCLR1 and CCLR0 in 16TCR to have 16TCNT cleared at GRA
compare match or GRB compare match.
3. Set TIOR to select the output compare function of GRA or GRB, whichever was selected in
step 2.
4. Write the count period in GRA or GRB, whichever was selected in step 2.
5. Set the STR bit to 1 in TSTR to start the timer counter.
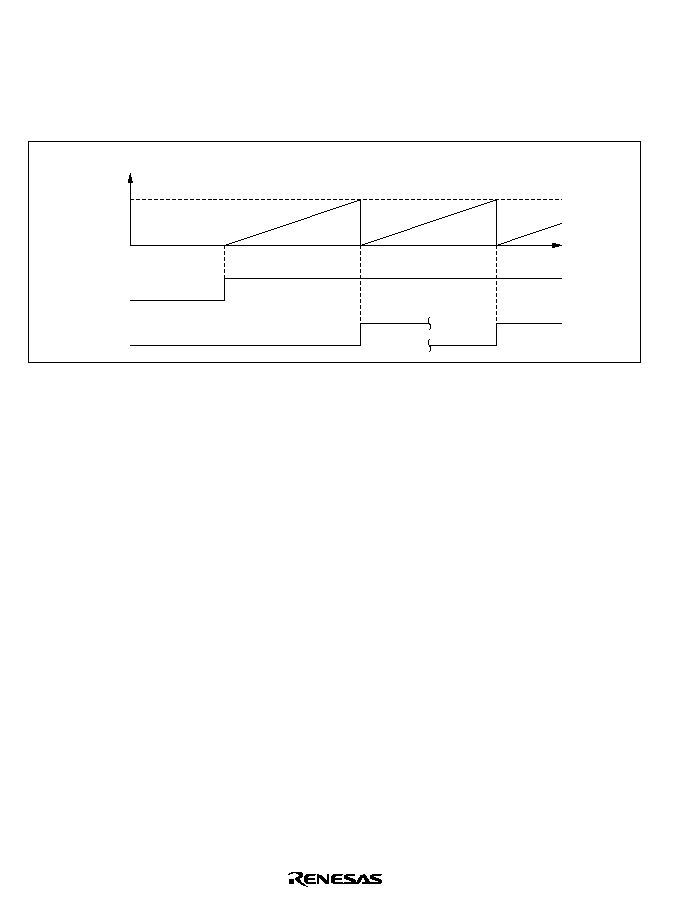
314
∑
Free-running and periodic counter operation
A reset leaves the counters (16TCNTs) in 16-bit timer channels 0 to 2 all set as free-running
counters. A free-running counter starts counting up when the corresponding bit in TSTR is set
to 1. When the count overflows from H'FFFF to H'0000, the OVF flag is set to 1 in TISRC.
After the overflow, the counter continues counting up from H'0000. Figure 9.13 illustrates
free-running counting.
16TCNT value
H'FFFF
H'0000
STR0 to
STR2 bit
OVF
Time
Figure 9.13 Free-Running Counter Operation
When a channel is set to have its counter cleared by compare match, in that channel 16TCNT
operates as a periodic counter. Select the output compare function of GRA or GRB, set bit CCLR1
or CCLR0 in 16TCR to have the counter cleared by compare match, and set the count period in
GRA or GRB. After these settings, the counter starts counting up as a periodic counter when the
corresponding bit is set to 1 in TSTR. When the count matches GRA or GRB, the IMFA or IMFB
flag is set to 1 in TISRA/TISRB and the counter is cleared to H'0000. If the corresponding IMIEA
or IMIEB bit is set to 1 in TISRA/TISRB, a CPU interrupt is requested at this time. After the
compare match, 16TCNT continues counting up from H'0000. Figure 9.14 illustrates periodic
counting.
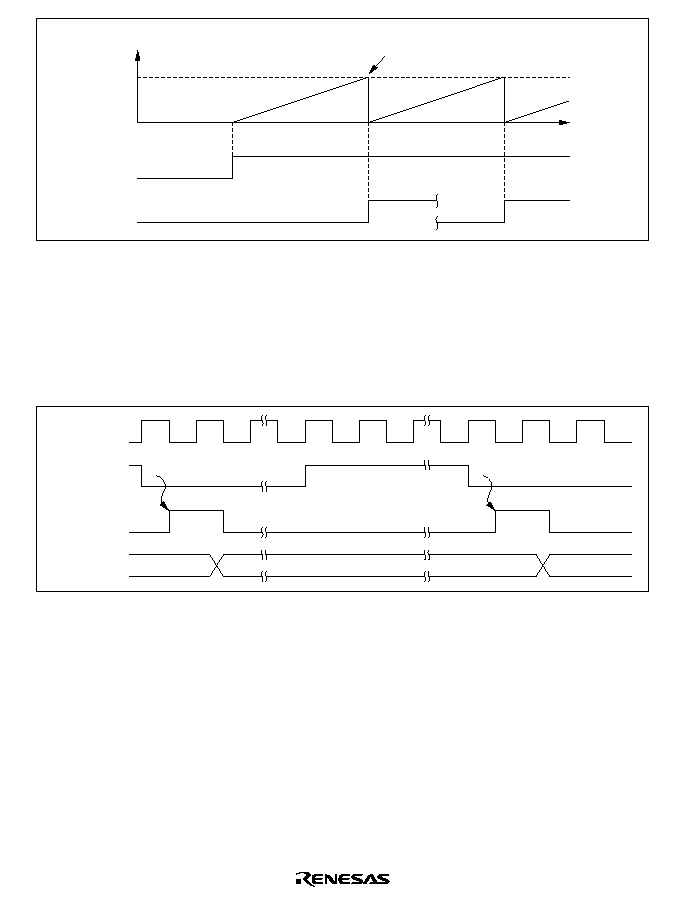
315
16TCNT value
GR
H'0000
STR bit
IMF
Time
Counter cleared by general
register compare match
Figure 9.14 Periodic Counter Operation
∑
16TCNT count timing
Internal clock source
Bits TPSC2 to TPSC0 in 16TCR select the system clock (
) or one of three internal clock
sources obtained by prescaling the system clock (
/2,
/4,
/8).
Figure 9.15 shows the timing.
16TCNT
Internal
clock
N ≠ 1
N
N + 1
16TCNT input
clock
Figure 9.15 Count Timing for Internal Clock Sources
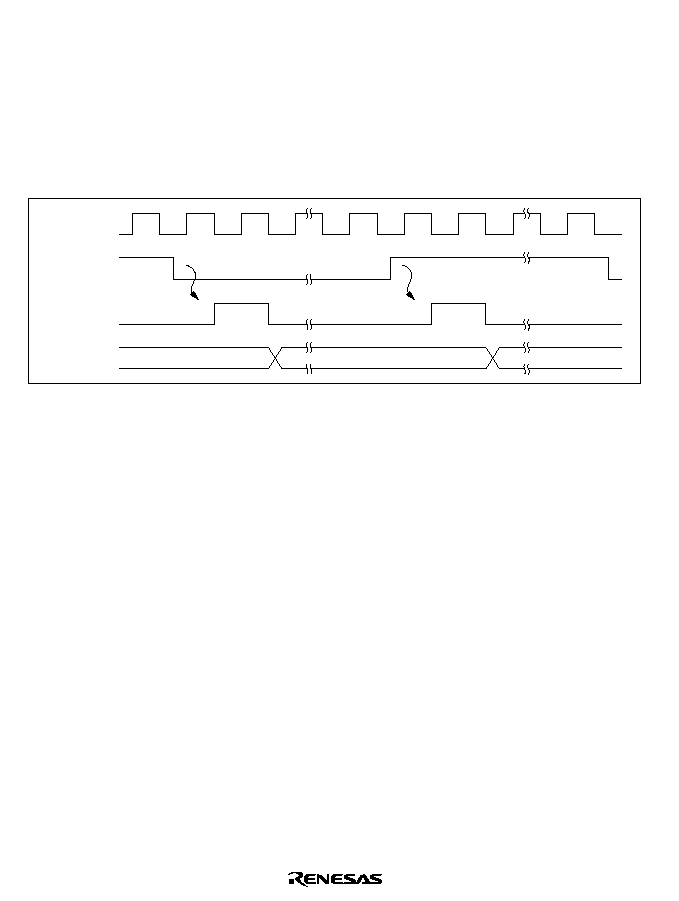
316
External clock source
Bits TPSC2 to TPSC0 in 16TCR select an external clock input pin (TCLKA to TCLKD),
and its valid edge or edges are selected by bits CKEG1 and CKEG0. The rising edge,
falling edge, or both edges can be selected.
The pulse width of the external clock signal must be at least 1.5 system clocks when a
single edge is selected, and at least 2.5 system clocks when both edges are selected. Shorter
pulses will not be counted correctly.
Figure 9.16 shows the timing when both edges are detected.
External
clock input
N ≠ 1
N
N + 1
16TCNT input
clock
16TCNT
Figure 9.16 Count Timing for External Clock Sources (when Both Edges are Detected)
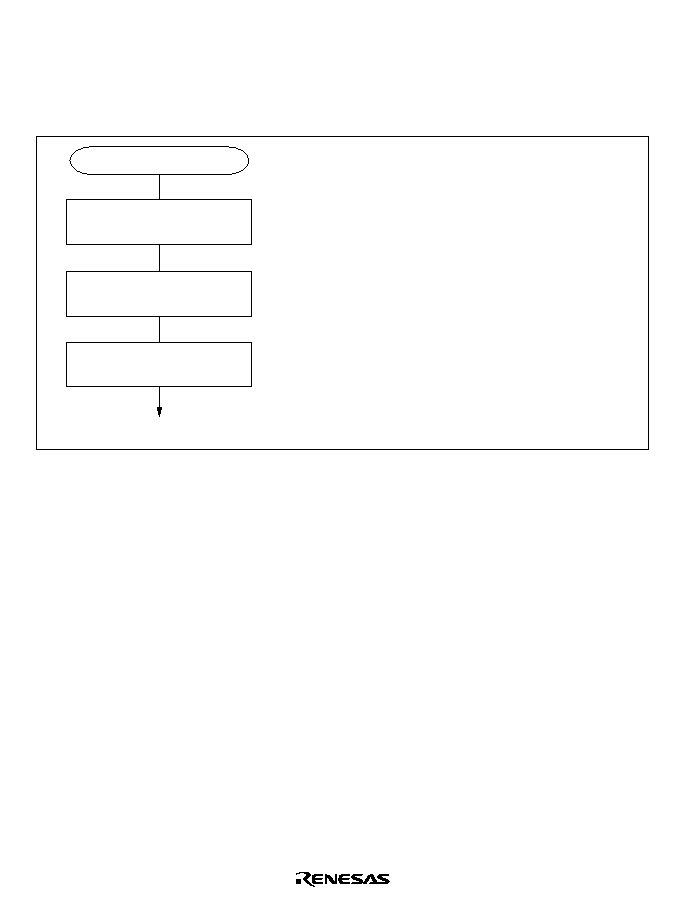
317
Waveform Output by Compare Match: In 16-bit timer channels 0, 1 compare match A or B can
cause the output at the TIOCA or TIOCB pin to go to 0, go to 1, or toggle. In channel 2 the output
can only go to 0 or go to 1.
∑
Sample setup procedure for waveform output by compare match
Figure 9.17 shows the timing for detection of both rising and falling edges.
Output setup
Select waveform
output mode
Set output timing
Start counter
Waveform output
Select the compare match output mode (0, 1, or
toggle) in TIOR. When a waveform output mode
is selected, the pin switches from its generic input/
output function to the output compare function
(TIOCA or TIOCB). An output compare pin outputs
the value set in TOLR until the first compare match
occurs.
Set a value in GRA or GRB to designate the
compare match timing.
Set the STR bit to 1 in TSTR to start the timer
counter.
1
2
3
1.
2.
3.
Figure 9.17 Setup Procedure for Waveform Output by Compare Match (Example)
∑
Examples of waveform output
Figure 9.18 shows examples of 0 and 1 output. 16TCNT operates as a free-running counter, 0
output is selected for compare match A, and 1 output is selected for compare match B. When
the pin is already at the selected output level, the pin level does not change.
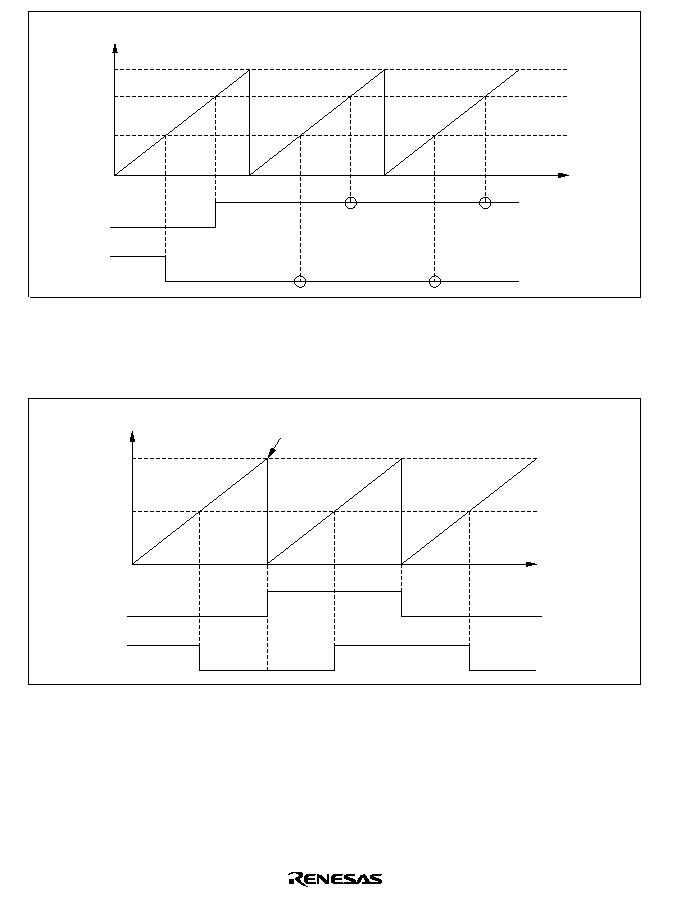
318
Time
H'FFFF
GRB
TIOCB
TIOCA
GRA
No change
No change
No change
No change
1 output
0 output
16TCNT value
H'0000
Figure 9.18 0 and 1 Output (TOA = 1, TOB = 0)
Figure 9.19 shows examples of toggle output. 16TCNT operates as a periodic counter, cleared by
compare match B. Toggle output is selected for both compare match A and B.
GRB
TIOCB
TIOCA
GRA
16TCNT value
Time
Counter cleared by compare match with GRB
Toggle
output
Toggle
output
H'0000
Figure 9.19 Toggle Output (TOA = 1, TOB = 0)
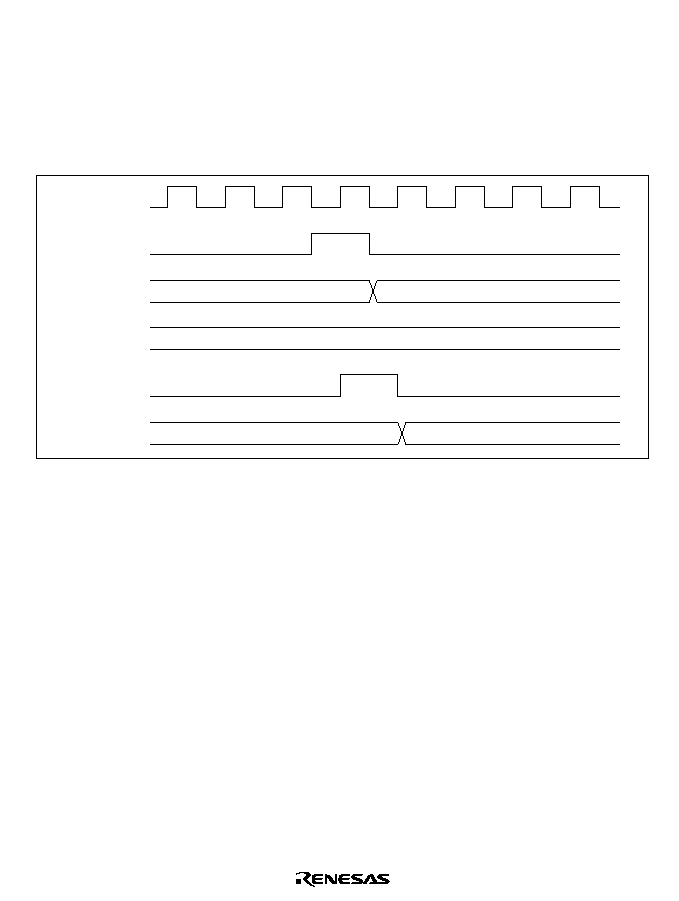
319
∑
Output compare output timing
The compare match signal is generated in the last state in which 16TCNT and the general
register match (when 16TCNT changes from the matching value to the next value). When the
compare match signal is generated, the output value selected in TIOR is output at the output
compare pin (TIOCA or TIOCB). When 16TCNT matches a general register, the compare
match signal is not generated until the next counter clock pulse.
Figure 9.20 shows the output compare timing.
N + 1
N
N
16TCNT input
clock
16TCNT
GR
Compare
match signal
TIOCA,
TIOCB
Figure 9.20 Output Compare Output Timing
Input Capture Function: The 16TCNT value can be captured into a general register when a
transition occurs at an input capture/output compare pin (TIOCA or TIOCB). Capture can take
place on the rising edge, falling edge, or both edges. The input capture function can be used to
measure pulse width or period.
∑
Sample setup procedure for input capture
Figure 9.21 shows a sample procedure for setting up input capture.

320
Input selection
Select input-capture input
Start counter
Input capture
Set TIOR to select the input capture function of a
general register and the rising edge, falling edge,
or both edges of the input capture signal. Clear the
DDR bit to 0 before making these TIOR settings.
Set the STR bit to 1 in TSTR to start the timer
counter.
1
2
1.
2.
Figure 9.21 Setup Procedure for Input Capture (Example)
∑
Examples of input capture
Figure 9.22 illustrates input capture when the falling edge of TIOCB and both edges of TIOCA
are selected as capture edges. 16TCNT is cleared by input capture into GRB.
H'0005
H'0180
H'0180
H'0160
H'0005
H'0000
TIOCB
TIOCA
GRA
GRB
TCNT value
H'0160
Figure 9.22 Input Capture (Example)
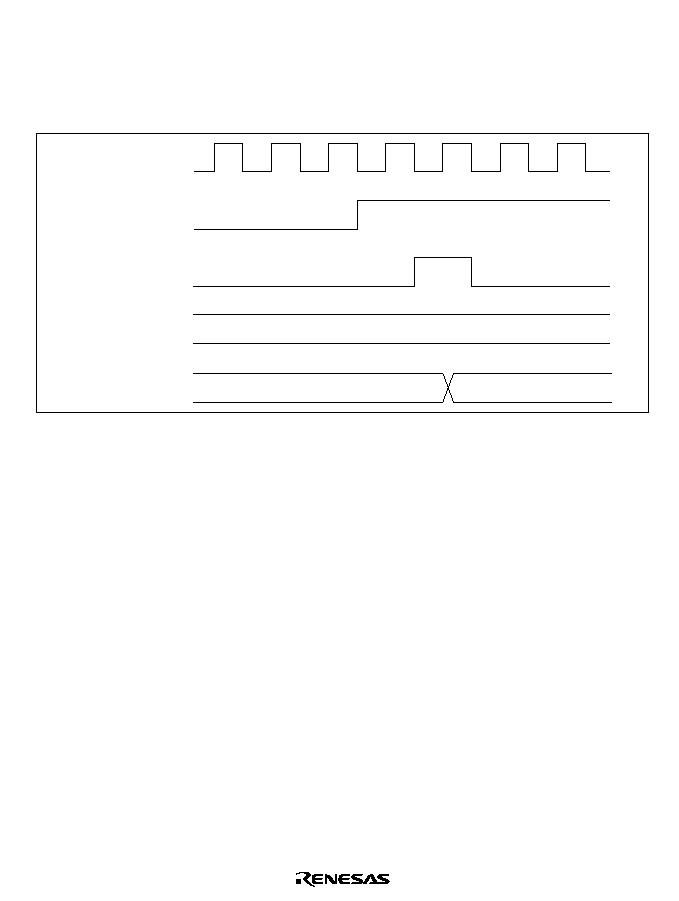
321
∑
Input capture signal timing
Input capture on the rising edge, falling edge, or both edges can be selected by settings in
TIOR. Figure 9.23 shows the timing when the rising edge is selected. The pulse width of the
input capture signal must be at least 1.5 system clocks for single-edge capture, and 2.5 system
clocks for capture of both edges.
N
N
Input-capture input
Input capture signal
16TCNT
GRA, GRB
Figure 9.23 Input Capture Signal Timing
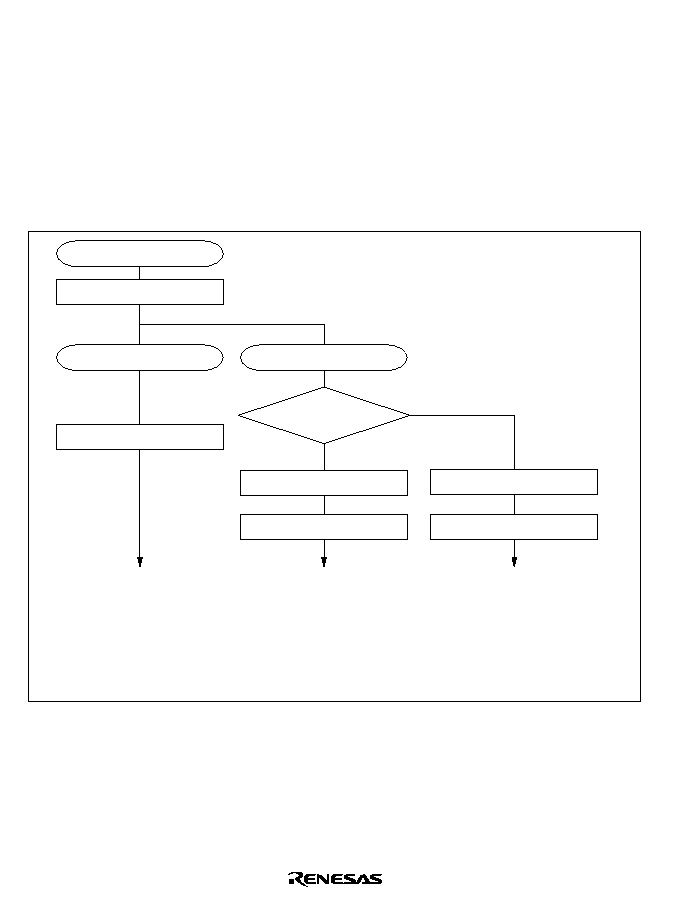
322
9.4.3
Synchronization
The synchronization function enables two or more timer counters to be synchronized by writing
the same data to them simultaneously (synchronous preset). With appropriate 16TCR settings, two
or more timer counters can also be cleared simultaneously (synchronous clear). Synchronization
enables additional general registers to be associated with a single time base. Synchronization can
be selected for all channels (0 to 2).
Sample Setup Procedure for Synchronization: Figure 9.24 shows a sample procedure for
setting up synchronization.
Setup for synchronization
Synchronous preset
Set the SYNC bits to 1 in TSNC for the channels to be synchronized.
When a value is written in 16TCNT in one of the synchronized channels, the same value is
simultaneously written in 16TCNT in the other channels.
1.
2.
2
3
1
5
4
5
Select synchronization
Synchronous preset
Write to 16TCNT
Synchronous clear
Clearing
synchronized to this
channel?
Select counter clear source
Start counter
Counter clear
Synchronous clear
Start counter
Select counter clear source
Yes
No
Set the CCLR1 or CCLR0 bit in 16TCR to have the counter cleared by compare match or input capture.
Set the CCLR1 and CCLR0 bits in 16TCR to have the counter cleared synchronously.
Set the STR bits in TSTR to 1 to start the synchronized counters.
3.
4.
5.
Figure 9.24 Setup Procedure for Synchronization (Example)

323
Example of Synchronization: Figure 9.25 shows an example of synchronization. Channels 0, 1,
and 2 are synchronized, and are set to operate in PWM mode. Channel 0 is set for counter clearing
by compare match with GRB0. Channels 1 and 2 are set for synchronous counter clearing. The
timer counters in channels 0, 1, and 2 are synchronously preset, and are synchronously cleared by
compare match with GRB0. A three-phase PWM waveform is output from pins TIOCA
0
, TIOCA
1
,
and TIOCA
2
. For further information on PWM mode, see section 9.4.4, PWM Mode.
TIOCA
2
TIOCA
1
TIOCA
0
GRA2
GRA1
GRB2
GRA0
GRB1
GRB0
Value of 16TCNT0 to 16TCNT2
Synchronous clearing by GRB0 compare match
H'0000
Figure 9.25 Synchronization (Example)

324
9.4.4
PWM Mode
In PWM mode GRA and GRB are paired and a PWM waveform is output from the TIOCA pin.
GRA specifies the time at which the PWM output changes to 1. GRB specifies the time at which
the PWM output changes to 0. If either GRA or GRB is selected as the counter clear source, a
PWM waveform with a duty cycle from 0% to 100% is output at the TIOCA pin. PWM mode can
be selected in all channels (0 to 2).
Table 9.4 summarizes the PWM output pins and corresponding registers. If the same value is set in
GRA and GRB, the output does not change when compare match occurs.
Table 9.4
PWM Output Pins and Registers
Channel
Output Pin
1 Output
0 Output
0
TIOCA
0
GRA0
GRB0
1
TIOCA
1
GRA1
GRB1
2
TIOCA
2
GRA2
GRB2

325
Sample Setup Procedure for PWM Mode: Figure 9.26 shows a sample procedure for setting up
PWM mode.
PWM mode
1. Set bits TPSC2 to TPSC0 in 16TCR to
select the counter clock source. If an
external clock source is selected, set
bits CKEG1 and CKEG0 in 16TCR to
select the desired edge(s) of the
external clock signal.
PWM mode
Select counter clock
1
Select counter clear source
2
Set GRA
3
Set GRB
4
Select PWM mode
5
Start counter
6
2. Set bits CCLR1 and CCLR0 in 16TCR
to select the counter clear source.
3. Set the time at which the PWM
waveform should go to 1 in GRA.
4. Set the time at which the PWM
waveform should go to 0 in GRB.
5. Set the PWM bit in TMDR to select
PWM mode. When PWM mode is
selected, regardless of the TIOR
contents, GRA and GRB become
output compare registers specifying
the times at which the PWM output
goes to 1 and 0. The TIOCA pin
automatically becomes the PWM
output pin. The TIOCB pin conforms
to the settings of bits IOB1 and IOB0
in TIOR. If TIOCB output is not
desired, clear both IOB1 and IOB0 to 0.
6. Set the STR bit to 1 in TSTR to start
the timer counter.
Figure 9.26 Setup Procedure for PWM Mode (Example)

326
Examples of PWM Mode: Figure 9.27 shows examples of operation in PWM mode. In PWM
mode TIOCA becomes an output pin. The output goes to 1 at compare match with GRA, and to 0
at compare match with GRB.
In the examples shown, 16TCNT is cleared by compare match with GRA or GRB. Synchronized
operation and free-running counting are also possible.
16TCNT value
Counter cleared by compare match A
Time
GRA
GRB
TIOCA
a. Counter cleared by GRA (TOA = 1)
16TCNT value
Counter cleared by compare match B
Time
GRB
GRA
TIOCA
b. Counter cleared by GRB (TOA = 0)
H'0000
H'0000
Figure 9.27 PWM Mode (Example 1)
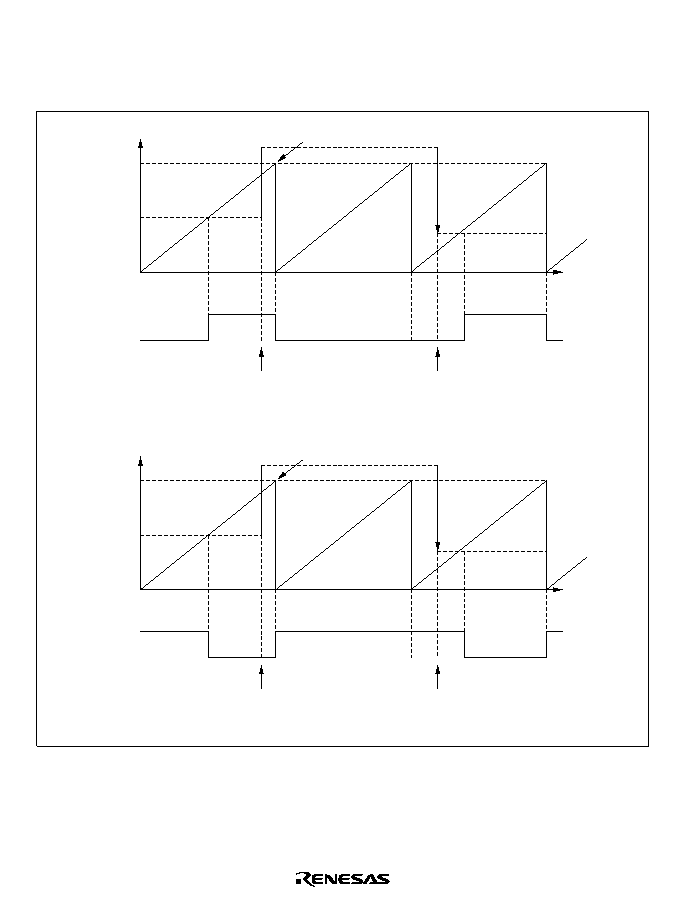
327
Figure 9.28 shows examples of the output of PWM waveforms with duty cycles of 0% and 100%.
If the counter is cleared by compare match with GRB, and GRA is set to a higher value than GRB,
the duty cycle is 0%. If the counter is cleared by compare match with GRA, and GRB is set to a
higher value than GRA, the duty cycle is 100%.
16TCNT value
Counter cleared by compare match B
Time
GRB
GRA
TIOCA
a. 0% duty cycle (TOA=0)
16TCNT value
Counter cleared by compare match A
Time
GRA
GRB
TIOCA
b. 100% duty cycle (TOA=1)
Write to GRA
Write to GRA
Write to GRB
Write to GRB
H'0000
H'0000
Figure 9.28 PWM Mode (Example 2)
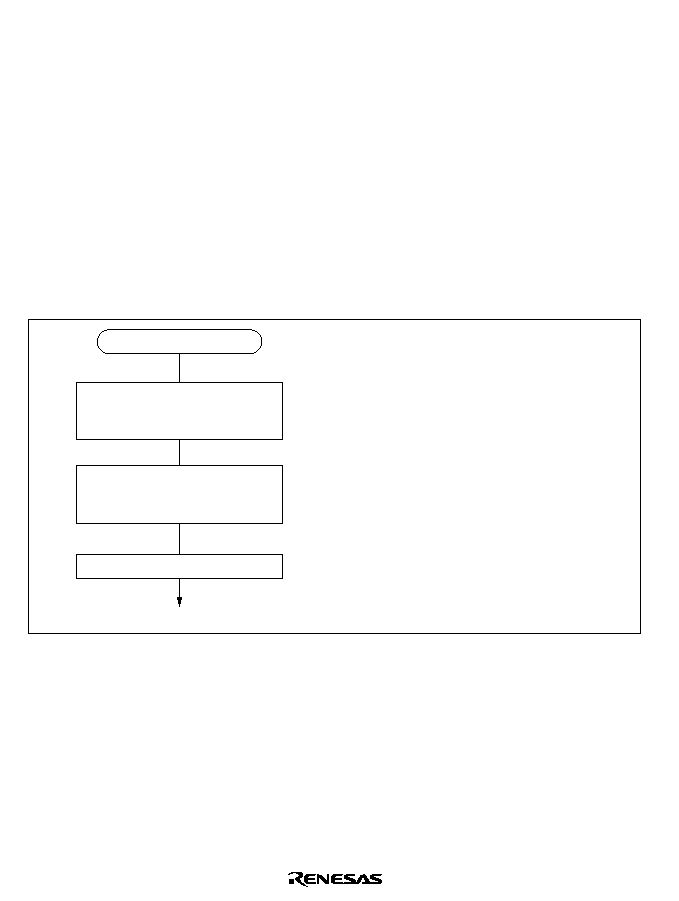
328
9.4.5
Phase Counting Mode
In phase counting mode the phase difference between two external clock inputs (at the TCLKA
and TCLKB pins) is detected, and 16TCNT2 counts up or down accordingly.
In phase counting mode, the TCLKA and TCLKB pins automatically function as external clock
input pins and 16TCNT2 becomes an up/down-counter, regardless of the settings of bits TPSC2 to
TPSC0, CKEG1, and CKEG0 in 16TCR2. Settings of bits CCLR1, CCLR0 in 16TCR2, and
settings in TIOR2, TISRA, TISRB, TISRC, STR2 in TSTR, GRA2, and GRB2 are valid. The
input capture and output compare functions can be used, and interrupts can be generated.
Phase counting is available only in channel 2.
Sample Setup Procedure for Phase Counting Mode: Figure 9.29 shows a sample procedure for
setting up phase counting mode.
Phase counting mode
Select phase counting mode
Select flag setting condition
Start counter
1
2
3
Phase counting mode
1.
2.
3.
Set the MDF bit in TMDR to 1 to select
phase counting mode.
Select the flag setting condition with
the FDIR bit in TMDR.
Set the STR2 bit to 1 in TSTR to start
the timer counter.
Figure 9.29 Setup Procedure for Phase Counting Mode (Example)
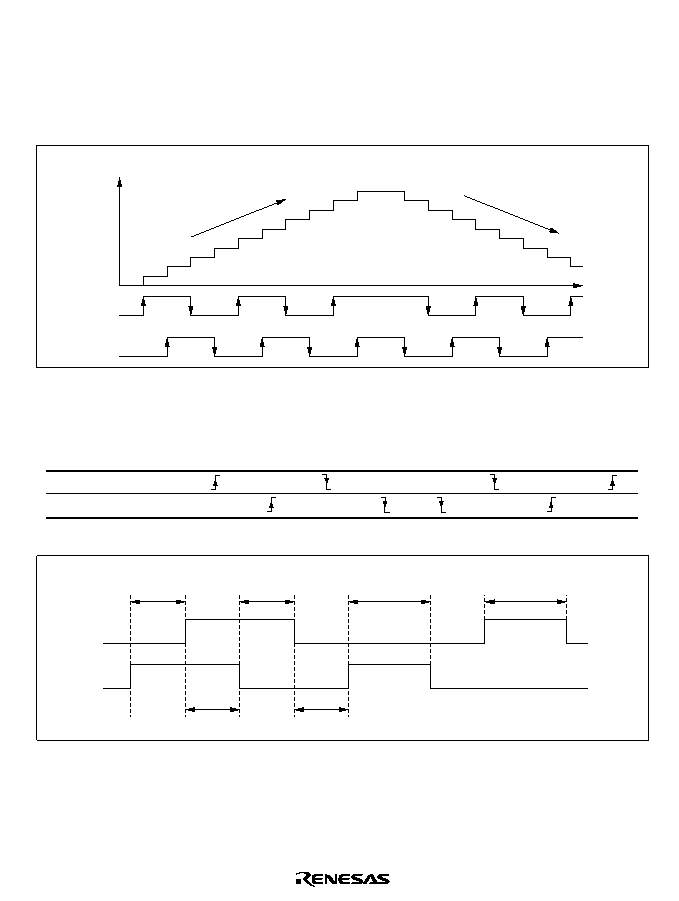
329
Example of Phase Counting Mode: Figure 9.30 shows an example of operations in phase
counting mode. Table 9.5 lists the up-counting and down-counting conditions for 16TCNT2.
In phase counting mode both the rising and falling edges of TCLKA and TCLKB are counted. The
phase difference between TCLKA and TCLKB must be at least 1.5 states, the phase overlap must
also be at least 1.5 states, and the pulse width must be at least 2.5 states.
16TCNT2 value
Counting up
Counting down
Time
TCLKB
TCLKA
Figure 9.30 Operation in Phase Counting Mode (Example)
Table 9.5
Up/Down Counting Conditions
Counting Direction
Up-Counting
Down-Counting
TCLKB pin
High
High
Low
Low
TCLKA pin
Low
High
High
Low
TCLKA
TCLKB
Phase
difference
Phase
difference
Pulse width
Pulse width
Overlap
Overlap
Phase difference and overlap:
Pulse width:
at least 1.5 states
at least 2.5 states
Figure 9.31 Phase Difference, Overlap, and Pulse Width in Phase Counting Mode
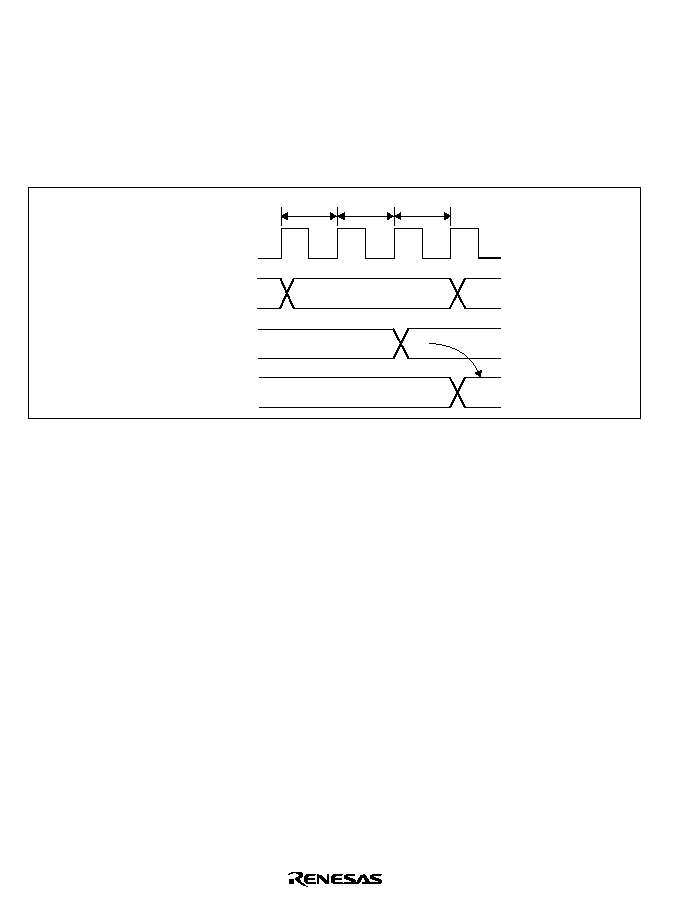
330
9.4.6
Setting Initial Value of 16-Bit Timer Output
Any desired value can be specified for the initial 16-bit timer output value when a timer count
operation is started by making a setting in TOLR.
Figure 9.32 shows the timing for setting the initial output value with TOLR.
Only write to TOLR when the corresponding bit in TSTR is cleared to 0.
T
1
TOLR address
N
N
T
2
T
3
Address bus
TOLR
ITU output pin
Figure 9.32 Example of Timing for Setting Initial Value of 16-Bit Timer Output by Writing
to TOLR
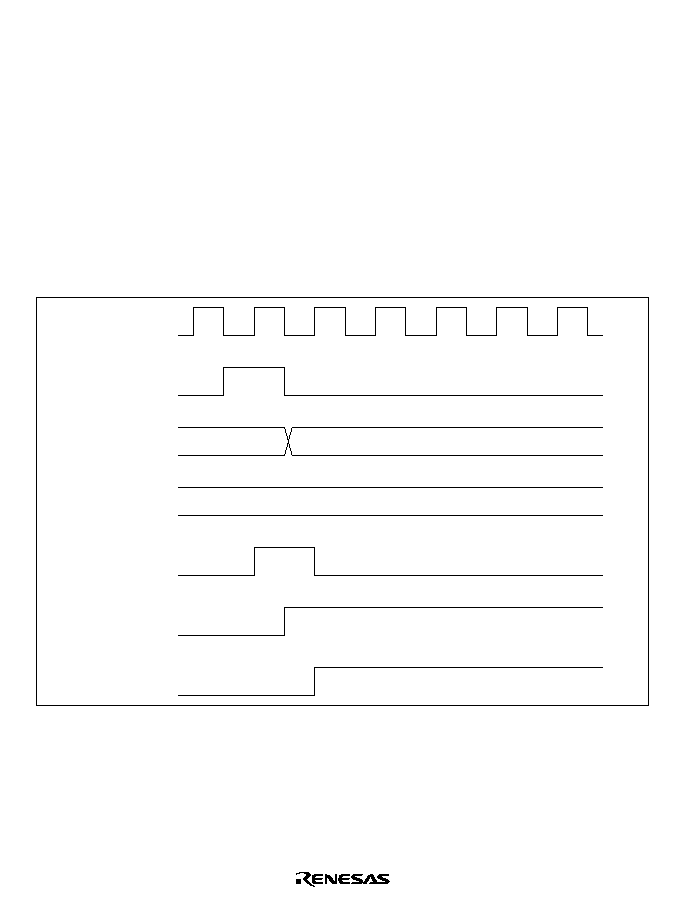
331
9.5
Interrupts
The 16-bit timer has two types of interrupts: input capture/compare match interrupts, and overflow
interrupts.
9.5.1
Setting of Status Flags
Timing of Setting of IMFA and IMFB at Compare Match: IMFA and IMFB are set to 1 by a
compare match signal generated when 16TCNT matches a general register (GR). The compare
match signal is generated in the last state in which the values match (when 16TCNT is updated
from the matching count to the next count). Therefore, when 16TCNT matches a general register,
the compare match signal is not generated until the next 16TCNT clock input. Figure 9.33 shows
the timing of the setting of IMFA and IMFB.
16TCNT
GR
IMF
IMI
16TCNT input
clock
Compare
match signal
N
N + 1
N
Figure 9.33 Timing of Setting of IMFA and IMFB by Compare Match
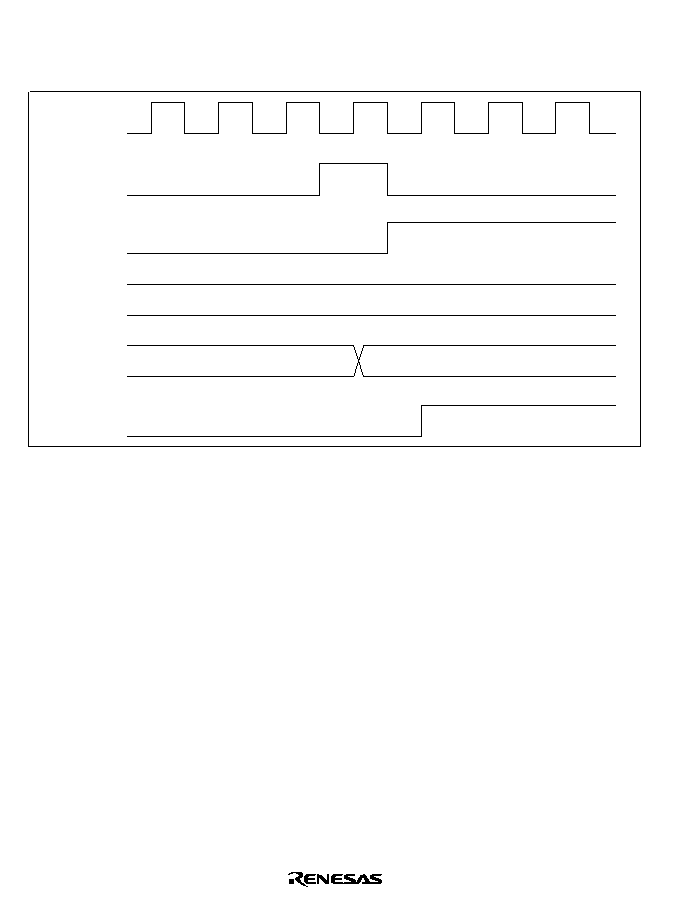
332
Timing of Setting of IMFA and IMFB by Input Capture: IMFA and IMFB are set to 1 by an
input capture signal. The 16TCNT contents are simultaneously transferred to the corresponding
general register. Figure 9.34 shows the timing.
Input capture
signal
N
N
IMF
16TCNT
GR
IMI
Figure 9.34 Timing of Setting of IMFA and IMFB by Input Capture
Timing of Setting of Overflow Flag (OVF): OVF is set to 1 when 16TCNT overflows from
H'FFFF to H'0000 or underflows from H'0000 to H'FFFF. Figure 9.35 shows the timing.
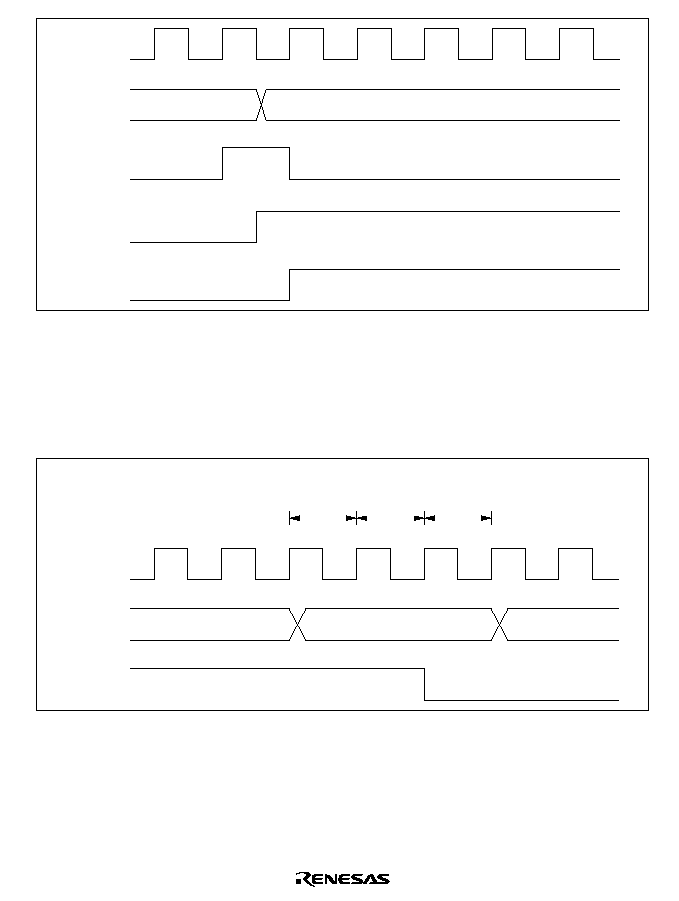
333
Overflow
signal
16TCNT
OVF
OVI
Figure 9.35 Timing of Setting of OVF
9.5.2
Timing of Clearing of Status Flags
If the CPU reads a status flag while it is set to 1, then writes 0 in the status flag, the status flag is
cleared. Figure 9.36 shows the timing.
Address
IMF, OVF
TISR write cycle
TISR address
T
1
T
2
T
3
Figure 9.36 Timing of Clearing of Status Flags
334
9.5.3
Interrupt Sources and DMA Controller Activation
Each 16-bit timer channel can generate a compare match/input capture A interrupt, a compare
match/input capture B interrupt, and an overflow interrupt. In total there are nine interrupt sources
of three kinds, all independently vectored. An interrupt is requested when the interrupt request flag
are set to 1.
The priority order of the channels can be modified in interrupt priority register A (IPRA). For
details see section 5, Interrupt Controller.
Compare match/input capture A interrupts in channels 0 to 2 can activate the DMA controller
(DMAC). When the DMAC is activated a CPU interrupt is not requested.
Table 9.6 lists the interrupt sources.
Table 9.6
16-bit timer Interrupt Sources
Channel
Interrupt
Source
Description
DMAC
Activatable
Priority*
0
IMIA0
IMIB0
OVI0
Compare match/input capture A0
Compare match/input capture B0
Overflow 0
Yes
No
No
High
1
IMIA1
IMIB1
OVI1
Compare match/input capture A1
Compare match/input capture B1
Overflow 1
Yes
No
No
2
IMIA2
IMIB2
OVI2
Compare match/input capture A2
Compare match/input capture B2
Overflow 2
Yes
No
No
Low
Note: * The priority immediately after a reset is indicated. Inter-channel priorities can be changed
by settings in IPRA.

335
9.6
Usage Notes
This section describes contention and other matters requiring special attention during 16-bit timer
operations.
Contention between 16TCNT Write and Clear: If a counter clear signal occurs in the T
3
state of
a 16TCNT write cycle, clearing of the counter takes priority and the write is not performed. See
figure 9.37.
Address bus
Internal write signal
Counter clear signal
16TCNT
TCNT write cycle
16TCNT address
N
H'0000
T
1
T
2
T
3
Figure 9.37 Contention between 16TCNT Write and Clear
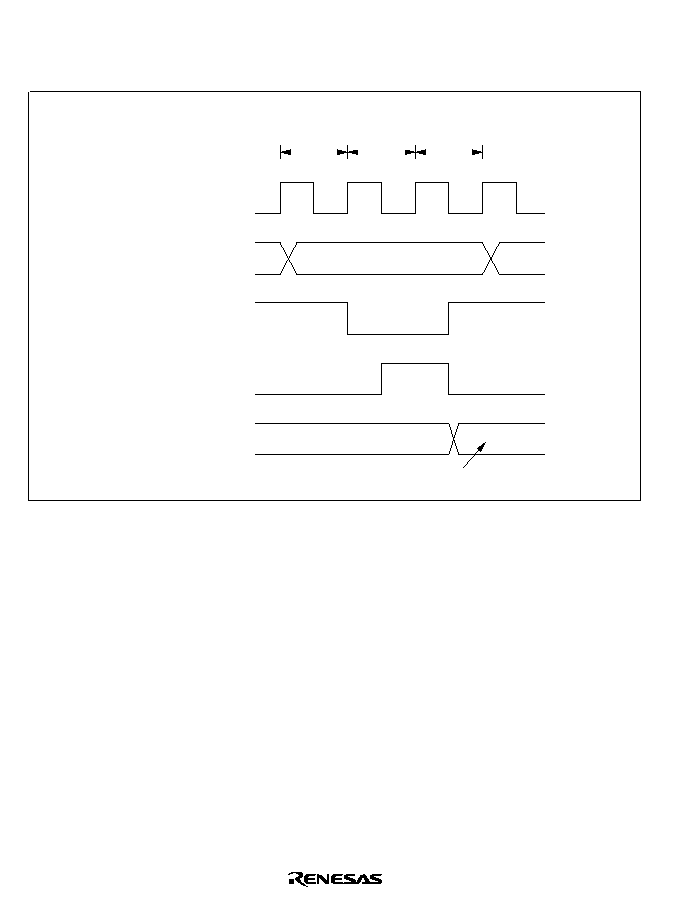
336
Contention between 16TCNT Word Write and Increment: If an increment pulse occurs in the
T
3
state of a 16TCNT word write cycle, writing takes priority and 16TCNT is not incremented.
Figure 9.38 shows the timing in this case.
Address bus
Internal write signal
16TCNT input clock
16TCNT
N
16TCNT address
M
16TCNT write data
16TCNT word write cycle
T
1
T
2
T
3
Figure 9.38 Contention between 16TCNT Word Write and Increment
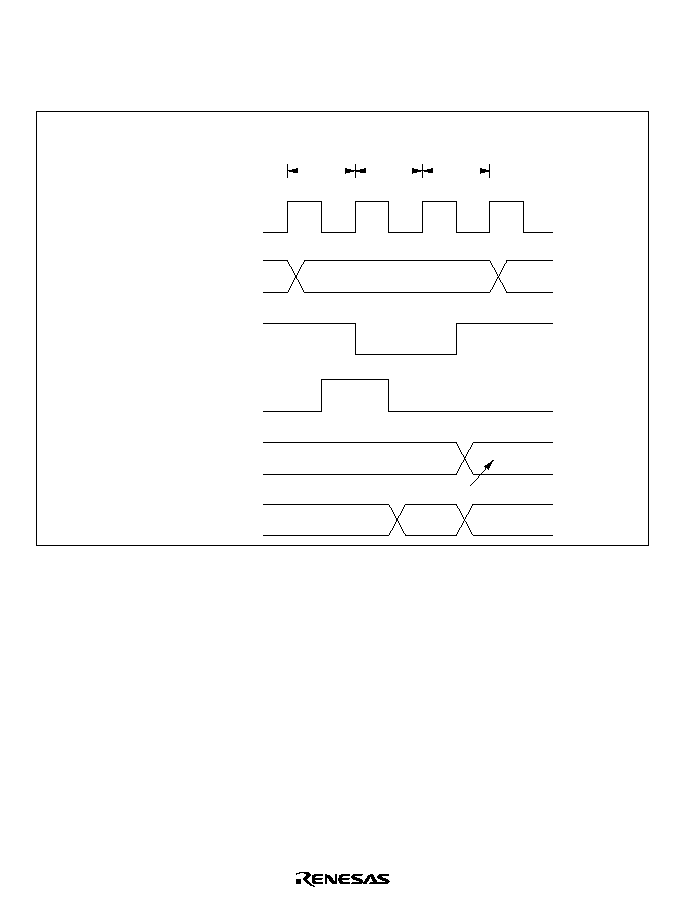
337
Contention between 16TCNT Byte Write and Increment: If an increment pulse occurs in the
T
2
or T
3
state of a 16TCNT byte write cycle, writing takes priority and 16TCNT is not
incremented. The 16TCNT byte that was not written retains its previous value. See figure 9.39,
which shows an increment pulse occurring in the T
2
state of a byte write to 16TCNTH.
Address bus
Internal write signal
16TCNT input clock
16TCNTH
16TCNTL
16TCNTH byte write cycle
T
1
T
2
T
3
N
16TCNTH address
M
16TCNT write data
X
X
X + 1
Figure 9.39 Contention between 16TCNT Byte Write and Increment

338
Contention between General Register Write and Compare Match: If a compare match occurs
in the T
3
state of a general register write cycle, writing takes priority and the compare match signal
is inhibited. See figure 9.40.
Address bus
Internal write signal
16TCNT
GR
Compare match signal
General register write cycle
T
1
T
2
T
3
N
GR address
M
N
N + 1
General register write data
Inhibited
Figure 9.40 Contention between General Register Write and Compare Match
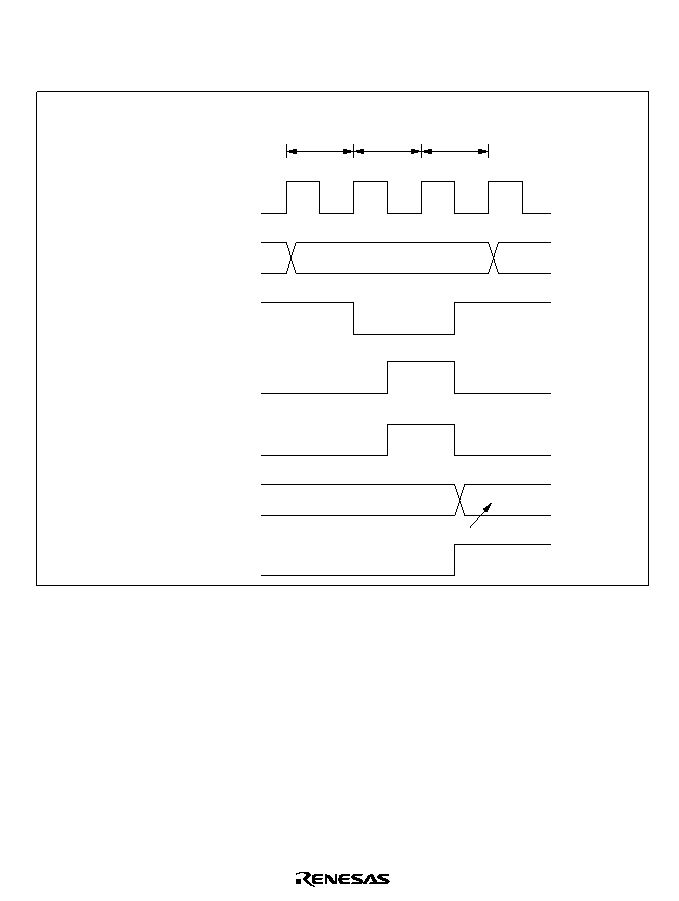
339
Contention between 16TCNT Write and Overflow or Underflow: If an overflow occurs in the
T
3
state of a 16TCNT write cycle, writing takes priority and the counter is not incremented. OVF
is set to 1.The same holds for underflow. See figure 9.41.
Address bus
Internal write signal
16TCNT input clock
Overflow signal
16TCNT
OVF
H'FFFF
16TCNT address
M
16TCNT write data
16TCNT write cycle
T
1
T
2
T
3
Figure 9.41 Contention between 16TCNT Write and Overflow
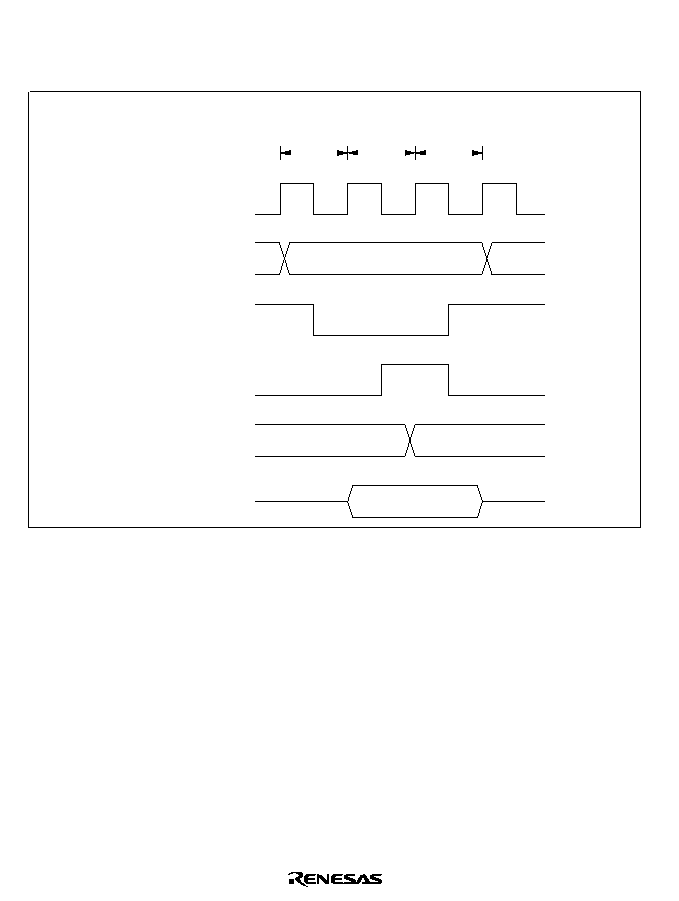
340
Contention between General Register Read and Input Capture: If an input capture signal
occurs during the T
3
state of a general register read cycle, the value before input capture is read.
See figure 9.42.
Address bus
Internal read signal
Input capture signal
GR
Internal data bus
GR address
X
General register read cycle
T
1
T
2
T
3
X
M
Figure 9.42 Contention between General Register Read and Input Capture
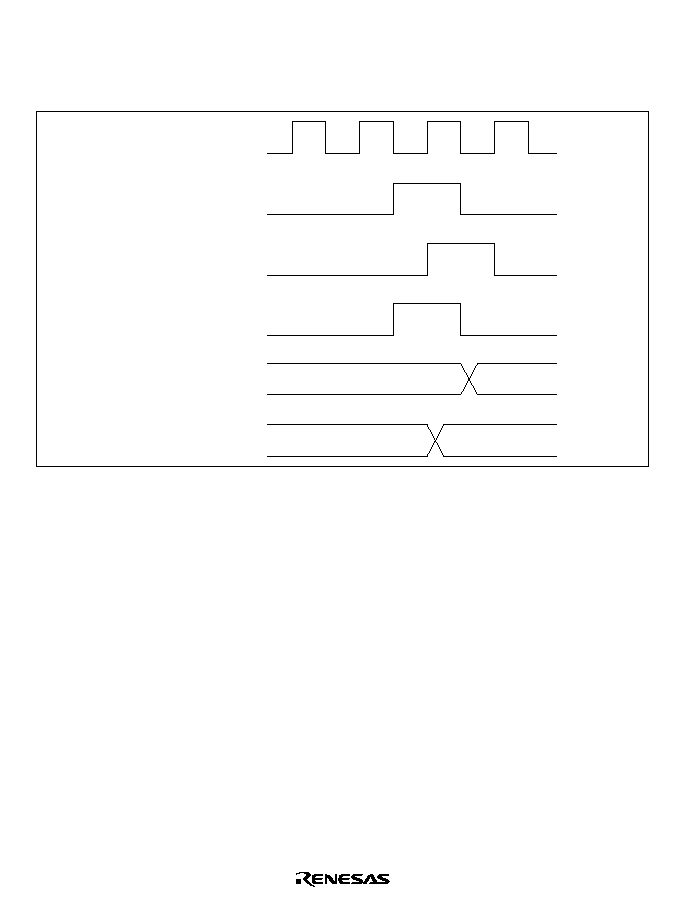
341
Contention between Counter Clearing by Input Capture and Counter Increment: If an input
capture signal and counter increment signal occur simultaneously, the counter is cleared according
to the input capture signal. The counter is not incremented by the increment signal. The value
before the counter is cleared is transferred to the general register. See figure 9.43.
Input capture signal
Counter clear signal
16TCNT input clock
16TCNT
GR
N
N
H'0000
Figure 9.43 Contention between Counter Clearing by Input Capture and Counter
Increment
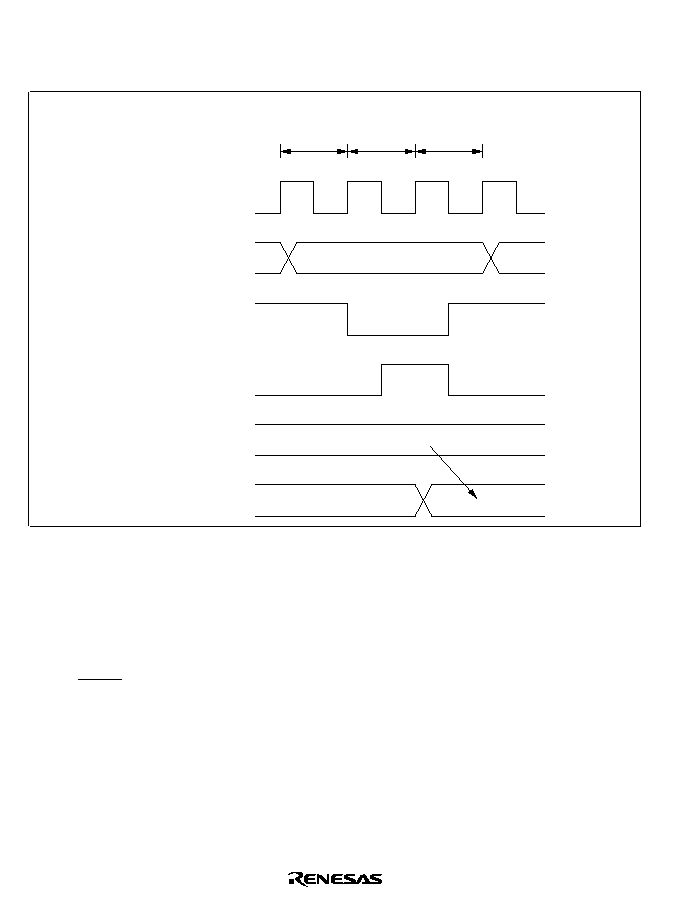
342
Contention between General Register Write and Input Capture: If an input capture signal
occurs in the T
3
state of a general register write cycle, input capture takes priority and the write to
the general register is not performed. See figure 9.44.
Address bus
Internal write signal
Input capture signal
16TCNT
GR
M
GR address
General register write cycle
T
1
T
2
T
3
M
Figure 9.44 Contention between General Register Write and Input Capture
Note on Waveform Period Setting: When a counter is cleared by compare match, the counter is
cleared in the last state at which the 16TCNT value matches the general register value, at the time
when this value would normally be updated to the next count. The actual counter frequency is
therefore given by the following formula:
f =
(N+1)
(f: counter frequency.
: system clock frequency. N: value set in general register.)

343
Note on Writes in Synchronized Operation: When channels are synchronized, if a 16TCNT
value is modified by byte write access, all 16 bits of all synchronized counters assume the same
value as the counter that was addressed.
(Example) When channels 1 and 2 are synchronized
∑ Byte write to channel 1 or byte write to channel 2
16TCNT1
16TCNT2
W
Y
X
Z
16TCNT1
16TCNT2
A
A
X
X
16TCNT1
16TCNT2
Y
Y
A
A
16TCNT1
16TCNT2
W
Y
X
Z
16TCNT1
16TCNT2
A
A
B
B
∑ Word write to channel 1 or word write to channel 2
Upper byte Lower byte
Upper byte Lower byte
Upper byte Lower byte
Upper byte Lower byte
Upper byte Lower byte
Write A to upper byte
of channel 1
Write A to lower byte
of channel 2
Write AB word to
channel 1 or 2
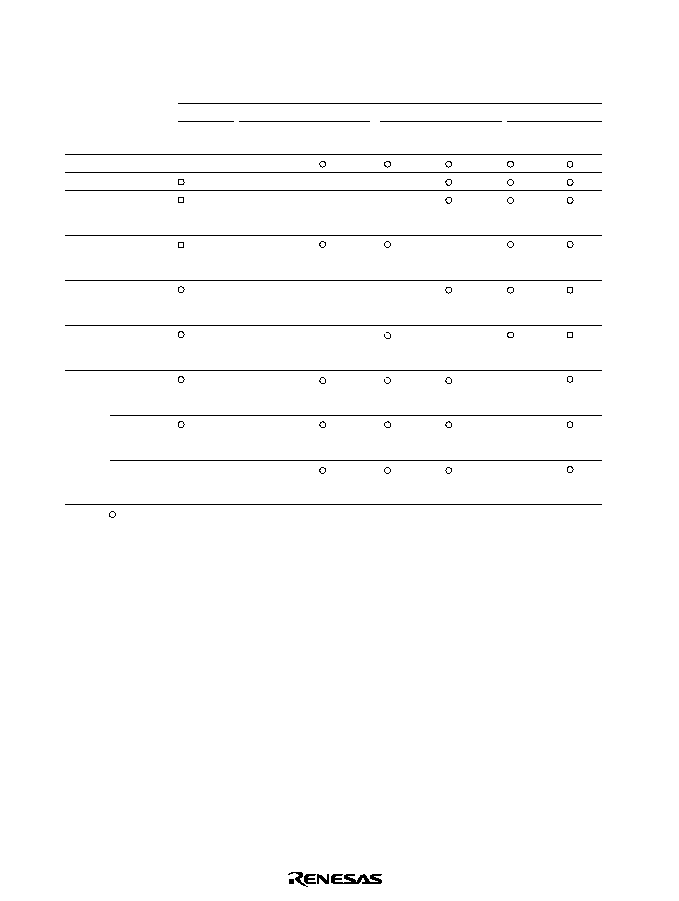
344
16-bit timer Operating Modes
Table 9.7 (a)16-bit timer Operating Modes (Channel 0)
Register Settings
TSNC
TMDR
TIOR0
TCR0
Synchro-
Clear Clock
Operating Mode
nization
MDF
FDIR PWM
IOA
IOB
Select
Select
Synchronous preset
SYNC0 = 1 --
--
PWM mode
--
--
PWM0 = 1
--
*
Output compare A
--
--
PWM0 = 0
IOA2 = 0
Other bits
unrestricted
Output compare B
--
--
IOB2 = 0
Other bits
unrestricted
Input capture A
--
--
PWM0 = 0
IOA2 = 1
Other bits
unrestricted
Input capture B
--
--
PWM0 = 0
IOB2 = 1
Other bits
unrestricted
Counter By compare
--
--
CCLR1 = 0
clearing match/input
CCLR0 = 1
capture A
By compare
--
--
CCLR1 = 1
match/input
CCLR0 = 0
capture B
Syn-
SYNC0 = 1 --
--
CCLR1 = 1
chronous
CCLR0 = 1
clear
Legend:
Setting available (valid). -- Setting does not affect this mode.
Note: * The input capture function cannot be used in PWM mode. If compare match A and compare match B occur
simultaneously, the compare match signal is inhibited.
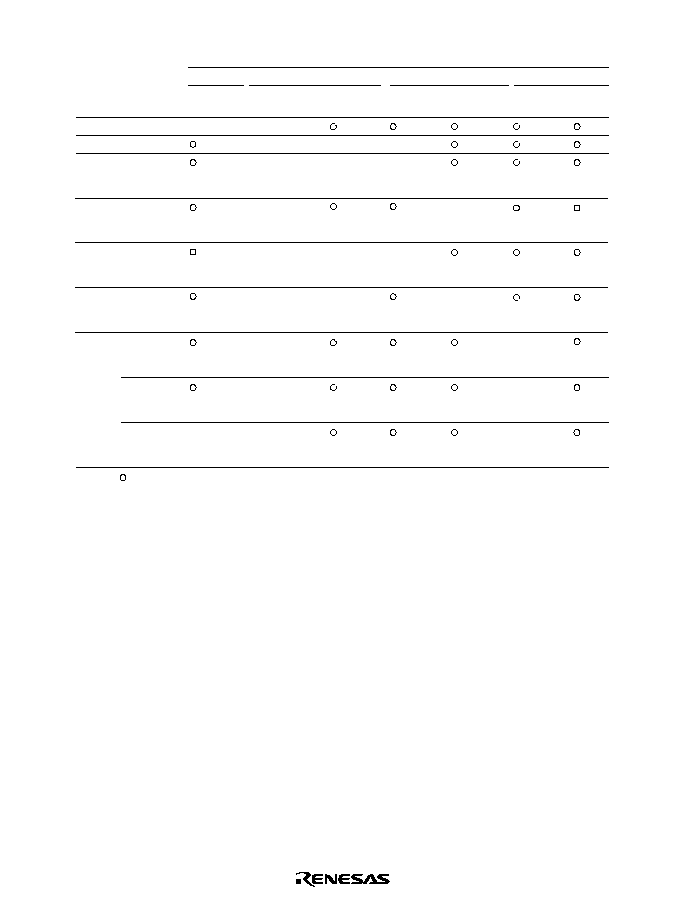
345
Table 9.7 (b)16-bit timer Operating Modes (Channel 1)
Register Settings
TSNC
TMDR
TIOR1
TCR1
Synchro-
Clear Clock
Operating Mode
nization
MDF
FDIR PWM
IOA
IOB
Select
Select
Synchronous preset
SYNC1 = 1 --
--
PWM mode
--
--
PWM1 = 1
--
Output compare A
--
--
PWM1 = 0
IOA2 = 0
Other bits
unrestricted
Output compare B
--
--
IOB2 = 0
Other bits
unrestricted
Input capture A
--
--
PWM1 = 0
IOA2 = 1
Other bits
unrestricted
Input capture B
--
--
PWM1 = 0
IOB2 = 1
Other bits
unrestricted
Counter By compare
--
--
CCLR1 = 0
clearing match/input
CCLR0 = 1
capture A
By compare
--
--
CCLR1 = 1
match/input
CCLR0 = 0
capture B
Syn-
SYNC1 = 1 --
--
CCLR1 = 1
chronous
CCLR0 = 1
clear
Legend:
Setting available (valid). -- Setting does not affect this mode.
Notes:
The input capture function cannot be used in PWM mode. If compare match A and compare match B
occur simultaneously, the compare match signal is inhibited.
*
*
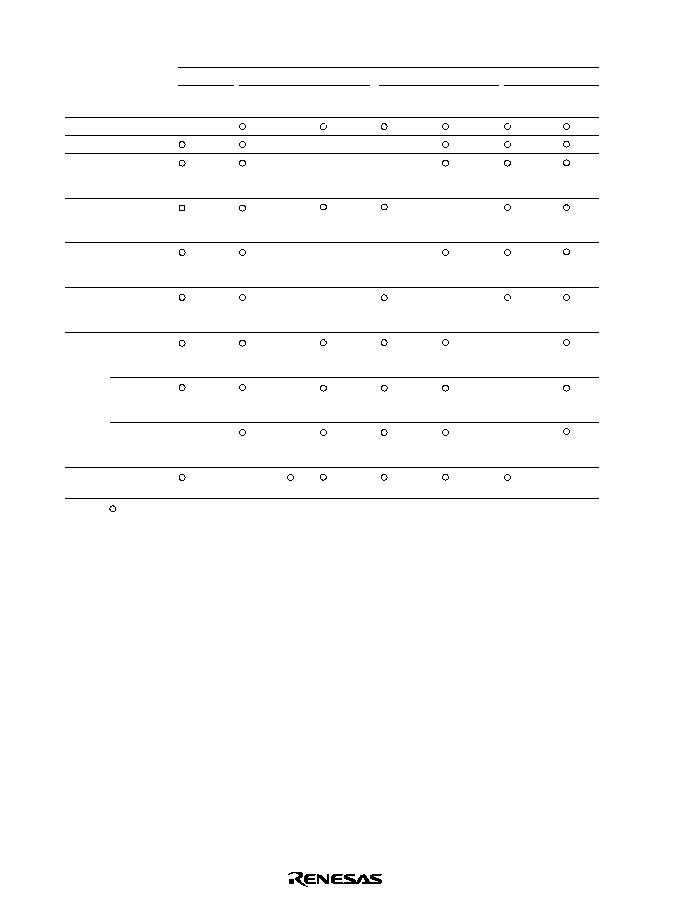
346
Table 9.7 (c) 16-bit timer Operating Modes (Channel 2)
Register Settings
TSNC
TMDR
TIOR2
TCR2
Synchro-
Clear Clock
Operating Mode
nization
MDF
FDIR PWM
IOA
IOB
Select
Select
Synchronous preset
SYNC2 = 1
--
PWM mode
--
PWM2 = 1
--
*
Output compare A
--
PWM2 = 0
IOA2 = 0
Other bits
unrestricted
Output compare B
--
IOB2 = 0
Other bits
unrestricted
Input capture A
--
PWM2 = 0
IOA2 = 1
Other bits
unrestricted
Input capture B
--
PWM2 = 0
IOB2 = 1
Other bits
unrestricted
Counter By compare
--
CCLR1 = 0
clearing match/input
CCLR0 = 1
capture A
By compare
--
CCLR1 = 1
match/input
CCLR0 = 0
capture B
Syn-
SYNC2 = 1
--
CCLR1 = 1
chronous
CCLR0 = 1
clear
Phase counting
MDF = 1
--
mode
Legend:
Setting available (valid). -- Setting does not affect this mode.
Note: * The input capture function cannot be used in PWM mode. If compare match A and compare match B occur
simultaneously, the compare match signal is inhibited.

347
Section 10 8-Bit Timers
10.1
Overview
The H8/3006 and H8/3007 have a built-in 8-bit timer module with four channels (TMR0, TMR1,
TMR2, and TMR3), based on 8-bit counters. Each channel has an 8-bit timer counter (8TCNT)
and two 8-bit time constant registers (TCORA and TCORB) that are constantly compared with the
8TCNT value to detect compare match events. The timers can be used as multifunctional timers
in a variety of applications, including the generation of a rectangular-wave output with an arbitrary
duty cycle.
10.1.1
Features
The features of the 8-bit timer module are listed below.
∑
Selection of four clock sources
The counters can be driven by one of three internal clock signals (
/8,
/64, or
/8192) or an
external clock input (enabling use as an external event counter).
∑
Selection of three ways to clear the counters
The counters can be cleared on compare match A or B, or input capture B.
∑
Timer output controlled by two compare match signals
The timer output signal in each channel is controlled by two independent compare match
signals, enabling the timer to generate output waveforms with an arbitrary duty cycle or PWM
output.
∑
A/D converter can be activated by a compare match
∑
Two channels can be cascaded
Channels 0 and 1 can be operated as the upper and lower halves of a 16-bit timer (16-bit
count mode).
Channels 2 and 3 can be operated as the upper and lower halves of a 16-bit timer (16-bit
count mode).
Channel 1 can count channel 0 compare match events (compare match count mode).
Channel 3 can count channel 2 compare match events (compare match count mode).
∑
Input capture function can be set
8-bit or 16-bit input capture operation is available.
∑
Twelve interrupt sources
There are twelve interrupt sources: four compare match sources, four compare match/input
capture sources, four overflow sources.

348
Two of the compare match sources and two of the combined compare match/input capture
sources each have an independent interrupt vector. The remaining compare match interrupts,
combined compare match/input capture interrupts, and overflow interrupts have one interrupt
vector for two sources.
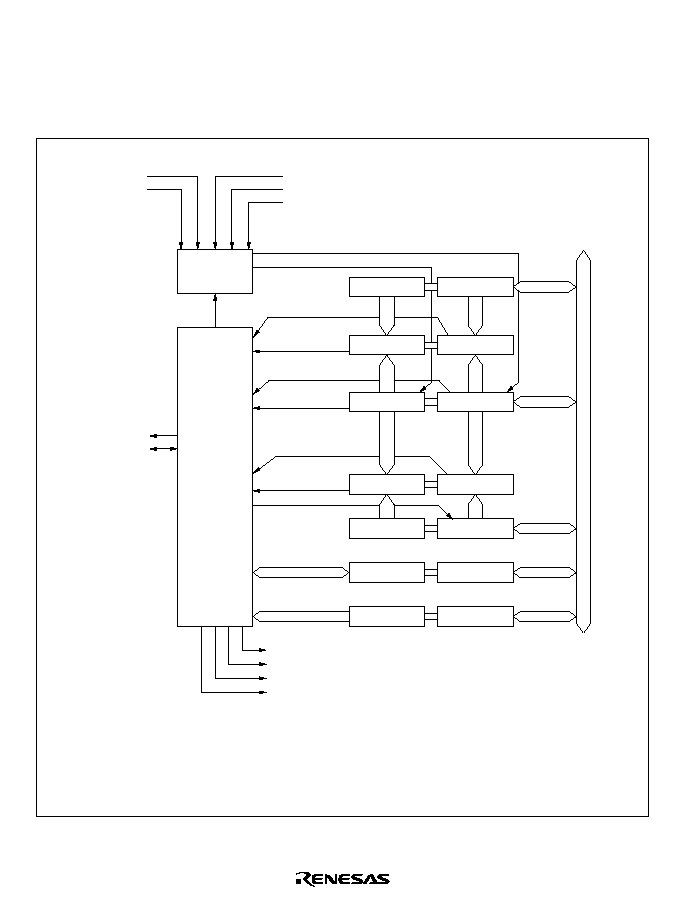
349
10.1.2
Block Diagram
The 8-bit timers are divided into two groups of two channels each: group 0 comprising channels 0
and 1, and group 1 comprising channels 2 and 3. Figure 10.1 shows a block diagram of 8-bit timer
group 0.
/8
/64
/8192
CMIA0
CMIB0
CMIA1/CMIB1
OVI0/OVI1
Interrupt signals
TMO
0
TMIO
1
TCORA0
TCORB0
8TCSR0
TCR0
TCORA1
8TCNT1
TCORB1
8TCSR1
TCR1
TCLKA
TCLKC
8TCNT0
Legend
TCORA : Timer constant register A
TCORB : Timer constant register B
8TCNT : Timer counter
8TCSR : Timer control/status register
8TCR
: Timer control register
External clock
sources
Internal clock
sources
Clock select
Control logic
Clock 1
Clock 0
Compare match A1
Compare match A0
Overflow 1
Overflow 0
Compare match B1
Compare match B0
Input capture B1
Comparator A0
Comparator A1
Comparator B0
Comparator B1
Internal bus
Figure 10.1 Block Diagram of 8-Bit Timer Unit (Two Channels: Group 0)
350
10.1.3
Pin Configuration
Table 10.1 summarizes the input/output pins of the 8-bit timer module.
Table 10.1
8-Bit Timer Pins
Group
Channel Name
Abbreviation I/O
Input/output
0
0
Timer output
TMO
0
Output Compare match output
Timer clock input
TCLKC
Input
Counter external clock input
1
Timer input/output TMIO
1
I/O
Compare match output/input
capture input
Timer clock input
TCLKA
Input
Counter external clock input
1
2
Timer output
TMO
2
Output Compare match output
Timer clock input
TCLKD
Input
Counter external clock input
3
Timer input/output TMIO
3
I/O
Compare match output/input
capture input
Timer clock input
TCLKB
Input
Counter external clock input
351
10.1.4
Register Configuration
Table 10.2 summarizes the registers of the 8-bit timer module.
Table 10.2
8-Bit Timer Registers
Channel
Address*1
Name
Abbreviation R/W
Initial value
0
H'FFF80
Timer control register 0
8TCR0
R/W
H'00
H'FFF82
Timer control/status register 0
8TCSR0
R/(W)*
2
H'00
H'FFF84
Timer constant register A0
TCORA0
R/W
H'FF
H'FFF86
Timer constant register B0
TCORB0
R/W
H'FF
H'FFF88
Timer counter 0
8TCNT0
R/W
H'00
1
H'FFF81
Timer control register 1
8TCR1
R/W
H'00
H'FFF83
Timer control/status register 1
8TCSR1
R/(W)*
2
H'00
H'FFF85
Timer constant register A1
TCORA1
R/W
H'FF
H'FFF87
Timer constant register B1
TCORB1
R/W
H'FF
H'FFF89
Timer counter 1
8TCNT1
R/W
H'00
2
H'FFF90
Timer control register 2
8TCR2
R/W
H'00
H'FFF92
Timer control/status register 2
8TCSR2
R/(W)*
2
H'10
H'FFF94
Timer constant register A2
TCORA2
R/W
H'FF
H'FFF96
Timer constant register B2
TCORB2
R/W
H'FF
H'FFF98
Timer counter 2
8TCNT2
R/W
H'00
3
H'FFF91
Timer control register 3
8TCR3
R/W
H'00
H'FFF93
Timer control/status register 3
8TCSR3
R/(W)*
2
H'00
H'FFF95
Timer constant register A3
TCORA3
R/W
H'FF
H'FFF97
Timer constant register B3
TCORB3
R/W
H'FF
H'FFF99
Timer counter 3
8TCNT3
R/W
H'00
Notes: 1. Indicates the lower 20 bits of the address in advanced mode.
2. Only 0 can be written to bits 7 to 5, to clear these flags.
Each pair of registers for channel 0 and channel 1 comprises a 16-bit register with the channel 0
register as the upper 8 bits and the channel 1 register as the lower 8 bits, so they can be accessed
together by word access.
Similarly, each pair of registers for channel 2 and channel 3 comprises a 16-bit register with the
channel 2 register as the upper 8 bits and the channel 3 register as the lower 8 bits, so they can be
accessed together by word access.
352
10.2
Register Descriptions
10.2.1
Timer Counters (8TCNT)
15
0
R/W
Bit
Initial value
Read/Write
14
0
R/W
Bit
Initial value
Read/Write
13
0
R/W
12
0
R/W
11
0
R/W
10
0
R/W
9
0
R/W
8
0
R/W
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
2
0
R/W
1
0
R/W
0
0
R/W
8TCNT0
8TCNT1
15
0
R/W
14
0
R/W
13
0
R/W
12
0
R/W
11
0
R/W
10
0
R/W
9
0
R/W
8
0
R/W
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
2
0
R/W
1
0
R/W
0
0
R/W
8TCNT2
8TCNT3
The timer counters (8TCNT) are 8-bit readable/writable up-counters that increment on pulses
generated from an internal or external clock source. The clock source is selected by clock select
bits 2 to 0 (CKS2 to CKS0) in the timer control register (8TCR). The CPU can always read or
write to the timer counters.
The 8TCNT0 and 8TCNT1 pair, and the 8TCNT2 and 8TCNT3 pair, can each be accessed as a
16-bit register by word access.
8TCNT can be cleared by an input capture signal or compare match signal. Counter clear bits 1
and 0 (CCLR1 and CCLR0) in 8TCR select the method of clearing.
When 8TCNT overflows from H'FF to H'00, the overflow flag (OVF) in the timer control/status
register (8TCSR) is set to 1.
Each 8TCNT is initialized to H'00 by a reset and in standby mode.
353
10.2.2
Time Constant Registers A (TCORA)
15
1
R/W
14
1
R/W
13
1
R/W
12
1
R/W
11
1
R/W
10
1
R/W
9
1
R/W
8
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
1
R/W
TCORA0
TCORA1
15
1
R/W
14
1
R/W
13
1
R/W
12
1
R/W
11
1
R/W
10
1
R/W
9
1
R/W
8
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
1
R/W
TCORA2
TCORA3
Bit
Initial value
Read/Write
Bit
Initial value
Read/Write
TCORA0 to TCORA3 are 8-bit readable/writable registers. The TCORA0 and TCORA1 pair, and
the TCORA2 and TCORA3 pair, can each be accessed as a 16-bit register by word access.
The TCORA value is constantly compared with the 8TCNT value. When a match is detected, the
corresponding compare match flag A (CMFA) is set to 1 in 8TCSR.
The timer output can be freely controlled by these compare match signals and the settings of
output select bits 1 and 0 (OS1, OS0) in 8TCSR.
Each TCORA register is initialized to H'FF by a reset and in standby mode.

354
10.2.3
Time Constant Registers B (TCORB)
15
1
R/W
14
1
R/W
13
1
R/W
12
1
R/W
11
1
R/W
10
1
R/W
9
1
R/W
8
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
1
R/W
TCORB0
TCORB1
15
1
R/W
14
1
R/W
13
1
R/W
12
1
R/W
11
1
R/W
10
1
R/W
9
1
R/W
8
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
1
R/W
TCORB2
TCORB3
Bit
Initial value
Read/Write
Bit
Initial value
Read/Write
TCORB0 to TCORB3 are 8-bit readable/writable registers. The TCORB0 and TCORB1 pair, and
the TCORB2 and TCORB3 pair, can each be accessed as a 16-bit register by word access.
The TCORB value is constantly compared with the 8TCNT value. When a match is detected, the
corresponding compare match flag B (CMFB) is set to 1 in 8TCSR.
The timer output can be freely controlled by these compare match signals and the settings of
output/input capture edge select bits 3 and 2 (OIS3, OIS2) in 8TCSR.
When TCORB is used for input capture, it stores the 8TCNT value on detection of an external
input capture signal. At this time, the CMFB flag is set to 1 in the corresponding 8TCSR register.
The detected edge of the input capture signal is set in 8TCSR.
Each TCORB register is initialized to H'FF by a reset and in standby mode.
10.2.4
Timer Control Register (8TCR)
7
CMIEB
0
R/W
6
CMIEA
0
R/W
5
OVIE
0
R/W
4
CCLR1
0
R/W
3
CCLR0
0
R/W
0
CKS0
0
R/W
2
CKS2
0
R/W
1
CKS1
0
R/W
Bit
Initial value
Read/Write
8TCR is an 8-bit readable/writable register that selects the input clock source and the time at
which 8TCNT is cleared, and enables interrupts.
8TCR is initialized to H'00 by a reset and in standby mode.

355
For the timing, see section 10.4, Operation.
Bit 7--Compare Match Interrupt Enable B (CMIEB): Enables or disables the CMIB interrupt
request when the CMFB flag is set to 1 in 8TCSR.
Bit 7
CMIEB
Description
0
CMIB interrupt requested by CMFB is disabled
(Initial value)
1
CMIB interrupt requested by CMFB is enabled
Bit 6--Compare Match Interrupt Enable A (CMIEA): Enables or disables the CMIA interrupt
request when the CMFA flag is set to 1 in 8TCSR.
Bit 6
CMIEA
Description
0
CMIA interrupt requested by CMFA is disabled
(Initial value)
1
CMIA interrupt requested by CMFA is enabled
Bit 5--Timer Overflow Interrupt Enable (OVIE): Enables or disables the OVI interrupt
request when the OVF flag is set to 1 in 8TCSR.
Bit 5
OVIE
Description
0
OVI interrupt requested by OVF is disabled
(Initial value)
1
OVI interrupt requested by OVF is enabled
Bits 4 and 3--Counter Clear 1 and 0 (CCLR1 and CCLR0): These bits specify the 8TCNT
clearing source. Compare match A or B, or input capture B, can be selected as the clearing source.
Bit 4
CCLR1
Bit 3
CCLR0
Description
0
0
Clearing is disabled
(Initial value)
1
Cleared by compare match A
1
0
Cleared by compare match B/input capture B
1
Cleared by input capture B
356
Bits 2 to 0--Clock Select 2 to 0 (CSK2 to CSK0): These bits select whether the clock input to
8TCNT is an internal or external clock.
Three internal clocks can be selected, all divided from the system clock (
):
/8,
/64, and
/8192.
The rising edge of the selected internal clock triggers the count.
When use of an external clock is selected, three types of count can be selected: at the rising edge,
the falling edge, and both rising and falling edges.
Some functions differ between channels 0 and 2 and channels 1 and 3.
Bit 2
CKS2
Bit 1
CKS1
Bit 0
CKS0
Description
0
0
0
Clock input disabled
(Initial value)
1
Internal clock, counted on rising edge of
/8
1
0
Internal clock, counted on rising edge of
/64
1
Internal clock, counted on rising edge of
/8192
1
0
0
Channel 0: Count on 8TCNT1 overflow signal*
1
Channel 1: Count on 8TCNT0 compare match A*
1
Channel 2: Count on 8TCNT3 overflow signal*
2
Channel 3: Count on 8TCNT2 compare match A*
2
1
External clock, counted on falling edge
1
0
External clock, counted on rising edge
1
External clock, counted on both rising and falling edges
Notes: 1. If the clock input of channel 0 is the 8TCNT1 overflow signal and that of channel 1 is the
8TCNT0 compare match signal, no incrementing clock is generated. Do not use this
setting.
2. If the clock input of channel 2 is the 8TCNT3 overflow signal and that of channel 3 is the
8TCNT2 compare match signal, no incrementing clock is generated. Do not use this
setting.
357
10.2.5
Timer Control/Status Registers (8TCSR)
8TCSR0
Bit
7
6
5
4
3
2
1
0
CMFB
CMFA
OVF
ADTE
OIS3
OIS2
OS1
OS0
Initial value
0
0
0
0
0
0
0
0
Read/Write
R/(W)*
R/(W)*
R/(W)*
R/W
R/W
R/W
R/W
R/W
8TCSR2
Bit
7
6
5
4
3
2
1
0
CMFB
CMFA
OVF
--
OIS3
OIS2
OS1
OS0
Initial value
0
0
0
1
0
0
0
0
Read/Write
R/(W)*
R/(W)*
R/(W)*
--
R/W
R/W
R/W
R/W
8TCSR1, 8TCSR3
Bit
7
6
5
4
3
2
1
0
CMFB
CMFA
OVF
ICE
OIS3
OIS2
OS1
OS0
Initial value
0
0
0
0
0
0
0
0
Read/Write
R/(W)*
R/(W)*
R/(W)*
R/W
R/W
R/W
R/W
R/W
Note: * Only 0 can be written to bits 7 to 5, to clear these flags.
The timer control/status registers (8TCSR) are 8-bit registers that indicate compare match/input
capture and timer overflow statuses, and control compare match output/input capture edge
selection.
Each 8TCSR is initialized to H'00 by a reset and in standby mode.
Bit 7--Compare Match/Input Capture Flag B (CMFB): Status flag that indicates the
occurrence of a TCORB compare match or input capture.
Bit 7
CMFB
Description
0
[Clearing condition]
(Initial value)
Read CMFB when CMFB = 1, then write 0 in CMFB
1
[Setting conditions]
∑
8TCNT = TCORB
∑
The 8TCNT value is transferred to TCORB by an input capture signal when
TCORB functions as an input capture register
358
Bit 6--Compare Match Flag A (CMFA): Status flag that indicates the occurrence of a TCORA
compare match or input capture.
Bit 6
CMFA
Description
0
Clearing condition
(Initial value)
Read CMFA when CMFA = 1, then write 0 in CMFA
1
Setting condition
8TCNT = TCORA
Bit 5--Timer Overflow Flag (OVF): Status flag that indicates that the 8TCNT has overflowed
(H'FF
H'00).
Bit 5
OVF
Description
0
Clearing condition
(Initial value)
Read OVF when OVF = 1, then write 0 in OVF
1
Setting condition
8TCNT overflows from H'FF to H'00
Bit 4--A/D Trigger Enable (ADTE) (8TCSR0): In combination with TRGE in the A/D control
register (ADCR), enables or disables A/D converter start requests by compare match A or an
external trigger. Bit 4 of 8TCSR2 is reserved, but can be read and written.
TRGE*
Bit 4
ADTE
Description
0
0
A/D converter start requests by compare match A or an external trigger pin
(
ADTRG
) input are disabled
(Initial value)
1
A/D converter start requests by compare match A or an external trigger pin
(
ADTRG
) input are disabled
1
0
A/D converter start requests by an external trigger pin (
ADTRG
) are enabled,
and A/D converter start requests by compare match A are disabled
1
A/D converter start requests by compare match A are enabled, and A/D
converter start requests by an external trigger pin (
ADTRG
) are disabled
Note:
* TRGE is bit 7 of the A/D control register (ADCR).
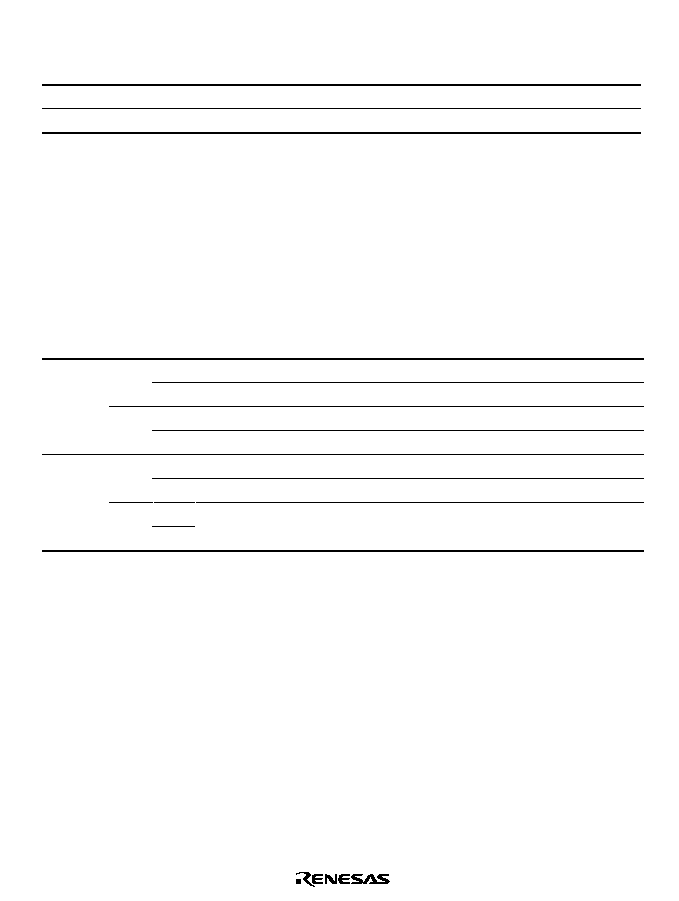
359
Bit 4--Input Capture Enable (ICE) (8TCSR1, 8TCSR3): Selects the function of TCORB.
Bit 4
ICE
Description
0
TCORB is a compare match register
(Initial value)
1
TCORB is an input capture register
Bits 3 and 2--Output/Input Capture Edge Select B3 and B2 (OIS3, OIS2): In combination
with the ICE bit in 8TCSR1 (8TCSR3), these bits select the compare match B output level or the
input capture input detected edge.
The function of TCORB1 (TCORB3) depends on the setting of bit 4 of 8TCSR1 (8TCSR3).
TCORB0 and TCORB2 function as compare match registers regardless of the setting of bit 4 of
8TCSR1 (8TCSR3).
ICE Bit in
8TCSR1
(8TCSR3)
Bit 3
OIS3
Bit 2
OIS2
Description
0
0
0
No change when compare match B occurs
(Initial value)
1
0 is output when compare match B occurs
1
0
1 is output when compare match B occurs
1
Output is inverted when compare match B occurs (toggle output)
1
0
0
TCORB input capture on rising edge
1
TCORB input capture on falling edge
1
0
TCORB input capture on both rising and falling edges
1
∑
When the compare match register function is used, the timer output priority order is: toggle
output > 1 output > 0 output.
∑
If compare match A and B occur simultaneously, the output changes in accordance with the
higher-priority compare match.
∑
When bits OIS3, OIS2, OS1, and OS0 are all cleared to 0, timer output is disabled.

360
Bits 1 and 0--Output Select A1 and A0 (OS1, OS0): These bits select the compare match A
output level.
Bit 1
OS1
Bit 0
OS0
Description
0
0
No change when compare match A occurs
(Initial value)
1
0 is output when compare match A occurs
1
0
1 is output when compare match A occurs
1
Output is inverted when compare match A occurs (toggle output)
∑
When the compare match register function is used, the timer output priority order is: toggle
output > 1 output > 0 output.
∑
If compare match A and B occur simultaneously, the output changes in accordance with the
higher-priority compare match.
∑
When bits OIS3, OIS2, OS1, and OS0 are all cleared to 0, timer output is disabled.

361
10.3
CPU Interface
10.3.1
8-Bit Registers
8TCNT, TCORA, TCORB, 8TCR, and 8TCSR are 8-bit registers. These registers are connected
to the CPU by an internal 16-bit data bus and can be read and written a word at a time or a byte at
a time.
Figures 10.2 and 10.3 show the operation in word read and write accesses to 8TCNT.
Figures 10.4 to 10.7 show the operation in byte read and write accesses to 8TCNT0 and 8TCNT1.
8TCNT0 8TCNT1
H
L
H
L
C
P
U
Internal data bus
Bus
interface
Module data bus
Figure 10.2 8TCNT Access Operation (CPU Writes to 8TCNT, Word)
8TCNT0 8TCNT1
H
L
H
L
C
P
U
Internal data bus
Bus
interface
Module data bus
Figure 10.3 8TCNT Access Operation (CPU Reads 8TCNT, Word)
8TCNT0 8TCNT1
H
L
H
L
C
P
U
Internal data bus
Bus
interface
Module data bus
Figure 10.4 8TCNTH Access Operation (CPU Writes to 8TCNTH, Upper Byte)
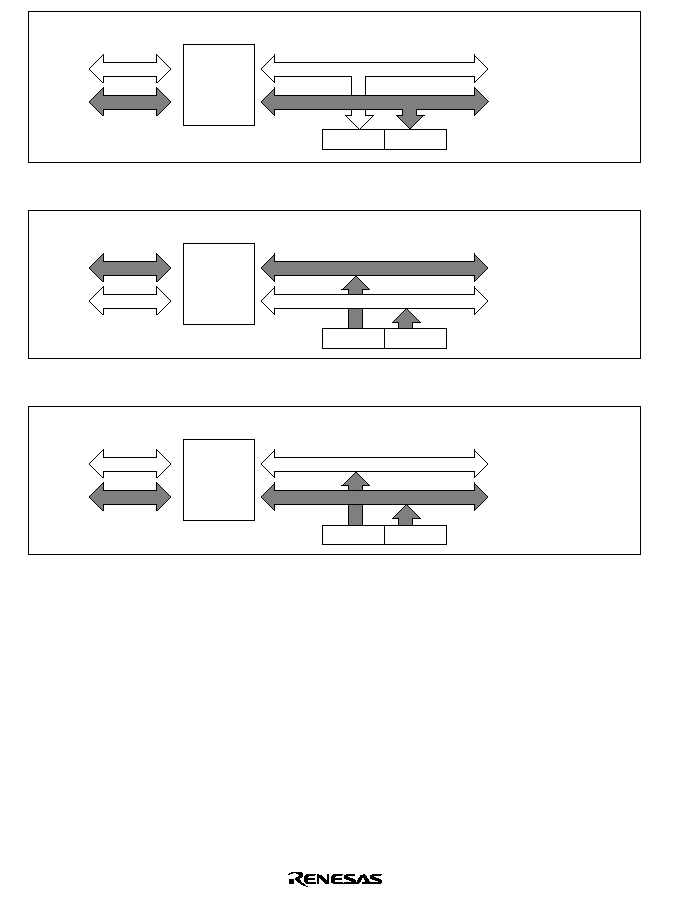
362
8TCNT0 8TCNT1
H
L
H
L
C
P
U
Internal data bus
Bus
interface
Module data bus
Figure 10.5 8TCNT1 Access Operation (CPU Writes to 8TCNT1, Lower Byte)
8TCNT0 8TCNT1
H
L
H
L
C
P
U
Internal data bus
Bus
interface
Module data bus
Figure 10.6 8TCNT0 Access Operation (CPU Reads 8TCNT0, Upper Byte)
8TCNT0 8TCNT1
H
L
H
L
C
P
U
Internal data bus
Bus
interface
Module data bus
Figure 10.7 8TCNT1 Access Operation (CPU Reads 8TCNT1, Lower Byte)
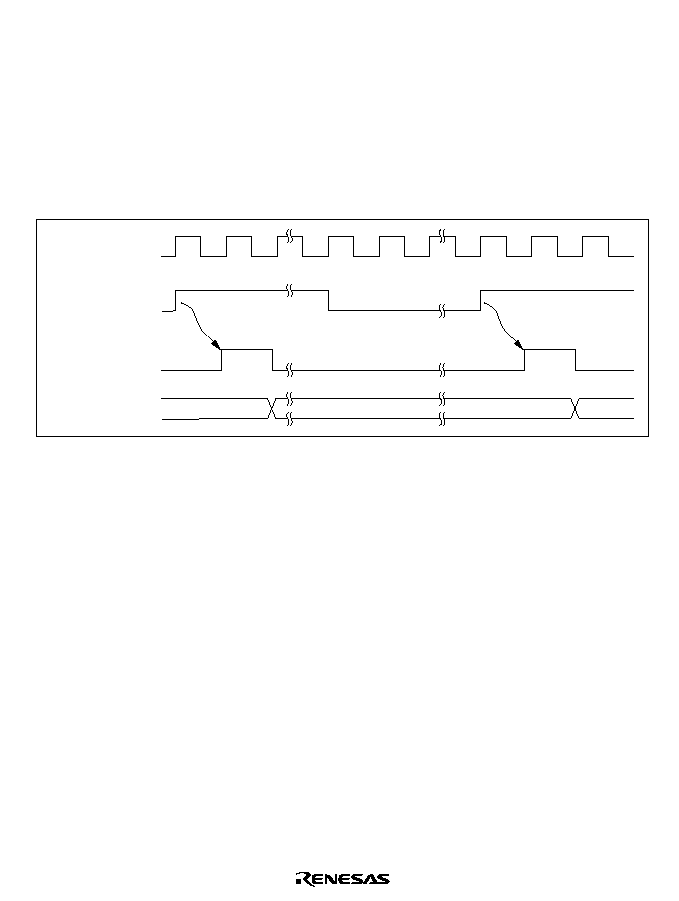
363
10.4
Operation
10.4.1
8TCNT Count Timing
8TCNT is incremented by input clock pulses (either internal or external).
Internal Clock: Three different internal clock signals (
/8,
/64, or
/8192) divided from the
system clock (
) can be selected by setting bits CKS2 to CKS0 in 8TCR. Figure 10.8 shows the
count timing.
8TCNT
N≠1
N
N+1
Internal clock
TCNT input clock
Figure 10.8 Count Timing for Internal Clock Input
Note: Even when the same internal clock is selected for both the 16- and 8-bit timers,
they do not operate in the same manner because the count-up edge differs.
External Clock: Three incrementation methods can be selected by setting bits CKS2 to CKS0 in
8TCR: on the rising edge, the falling edge, and both rising and falling edges.
The pulse width of the external clock signal must be at least 1.5 serial clocks when a single edge
is selected, and at least 2.5 system clocks when both edges are selected. Shorter pulses will not be
counted correctly.
Figure 10.9 shows the timing for incrementation on both edges of the external clock signal.
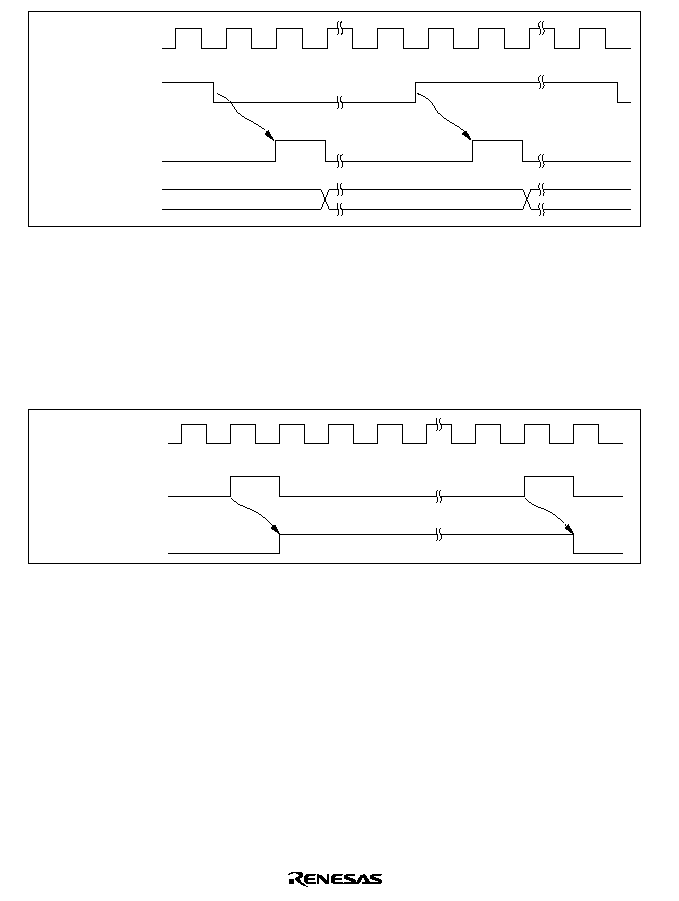
364
8TCNT
N≠1
N
N+1
External clock input
8TCNT input clock
Figure 10.9 Count Timing for External Clock Input (When Detecting the Both Edges)
10.4.2
Compare Match Timing
Timer Output Timing: When compare match A or B occurs, the timer output is as specified by
the OIS3, OIS2, OS1, and OS0 bits in 8TCSR (unchanged, 0 output, 1 output, or toggle output).
Figure 10.10 shows the timing when the output is set to toggle on compare match A.
Compare match A
signal
Timer output
Figure 10.10 Timing of Timer Output
Clear by Compare Match: Depending on the setting of the CCLR1 and CCLR0 bits in 8TCR,
8TCNT can be cleared when compare match A or B occurs, Figure 10.11 shows the timing of
this operation.
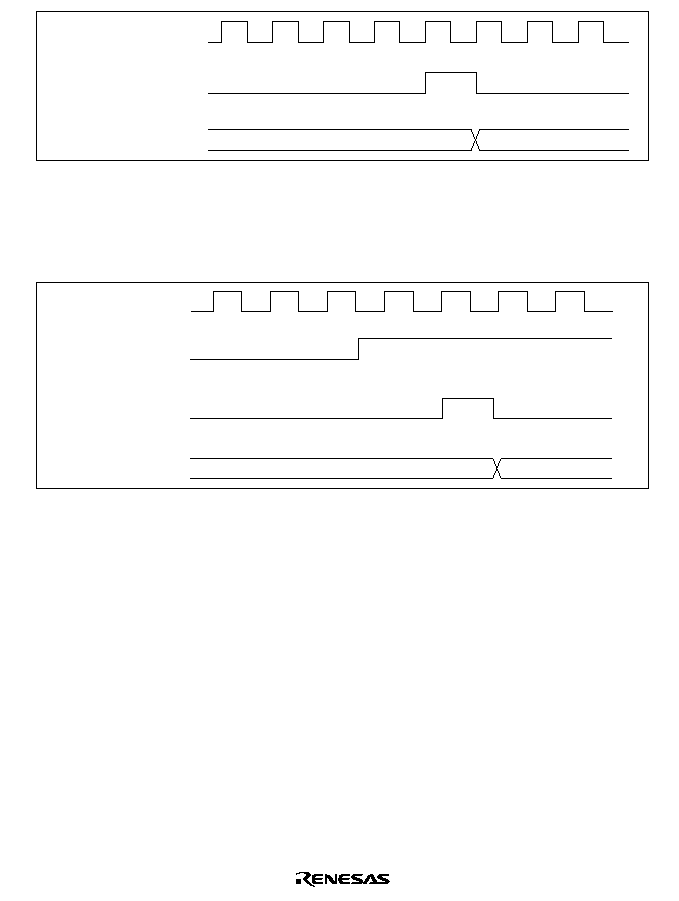
365
N
H'00
8TCNT
Compare match signal
Figure 10.11 Timing of Clear by Compare Match
Clear by Input Capture: Depending on the setting of the CCLR1 and CCLR0 bits in 8TCR,
8TCNT can be cleared when input capture B occurs. Figure 10.12 shows the timing of this
operation.
Input capture signal
Input capture input
8TCNT
N
H '00
Figure 10.12 Timing of Clear by Input Capture
10.4.3
Input Capture Signal Timing
Input capture on the rising edge, falling edge, or both edges can be selected by settings in 8TCSR.
Figure 10.13 shows the timing when the rising edge is selected.
The pulse width of the input capture input signal must be at least 1.5 system clocks when a single
edge is selected, and at least 2.5 system clocks when both edges are selected.
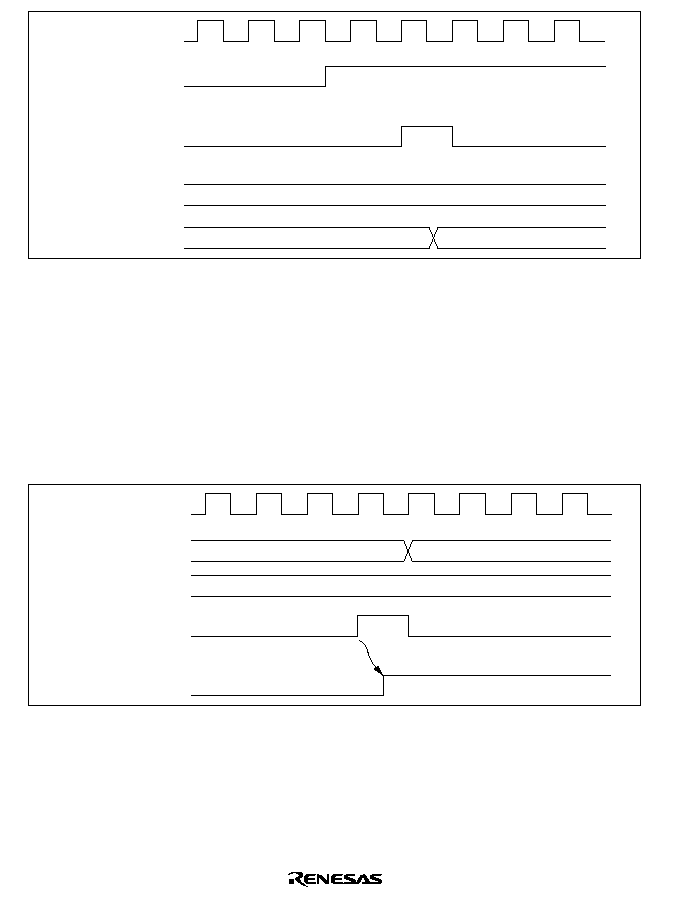
366
Input capture signal
Input capture input
8TCNT
N
TCORB
N
Figure 10.13 Timing of Input Capture Input Signal
10.4.4
Timing of Status Flag Setting
Timing of CMFA/CMFB Flag Setting when Compare Match Occurs: CMFA and CMFB in
8TCSR are set to 1 by the compare match signal output when the TCOR and 8TCNT values
match. The compare match signal is generated in the last state of the match (when the matched
8TCNT count value is updated). Therefore, after the 8TCNT and TCOR values match, the
compare match signal is not generated until an incrementing clock pulse is generated. Figure
10.14 shows the timing in this case.
CMF
Compare match signal
8TCNT
N
N+1
N
TCOR
Figure 10.14 CMF Flag Setting Timing when Compare Match Occurs
Timing of CMFB Flag Setting when Input Capture Occurs: On generation of an input capture
signal, the CMFB flag is set to 1 and at the same time the 8TCNT value is transferred to TCORB.
Figure 10.15 shows the timing in this case.
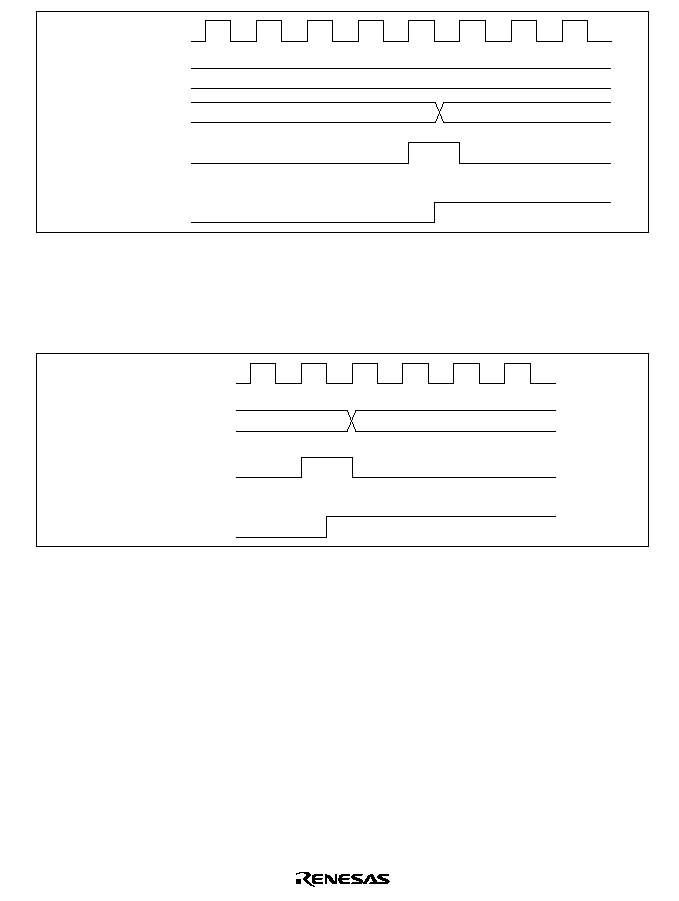
367
CMFB
Input capture signal
8TCNT
N
N
TCORB
Figure 10.15 CMFB Flag Setting Timing when Input Capture Occurs
Timing of Overflow Flag (OVF) Setting: The OVF flag in 8TCSR is set to 1 by the overflow
signal generated when 8TCNT overflows (from H'FF to H'00). Figure 10.16 shows the timing in
this case.
OVF
Overflow signal
8TCNT
H'FF
H'00
Figure 10.16 Timing of OVF Setting
10.4.5
Operation with Cascaded Connection
If bits CKS2 to CKS0 are set to (100) in either 8TCR0 or 8TCR1, the 8-bit timers of channels 0
and 1 are cascaded. With this configuration, the two timers can be used as a single 16-bit timer
(16-bit count mode), or channel 0 8-bit timer compare matches can be counted in channel 1
(compare match count mode). In this case, the timer operates as below. Similarly, if bits CKS2 to
CKS0 are set to (100) in either 8TCR2 or 8TCR3, the 8-bit timers of channels 0 and 1 are
cascaded. With this configuration, the two timers can be used as a single 16-bit timer (16-bit
count mode),or channel 2 8-bit timer compare matches can be counted in channel 3 (compare
match count mode). Timer operation in these cases is described below.

368
16-Bit Count Mode
∑
Channels 0 and 1:
When bits CKS2 to CKS0 are set to (100) in 8TCR0, the timer functions as a single 16-bit
timer with channel 0 occupying the upper 8 bits and channel 1 occupying the lower 8 bits.
Setting when Compare Match Occurs
∑
The CMF flag is set to 1 in 8TCR0 when a 16-bit compare match occurs.
∑
The CMF flag is set to 1 in 8TCR1 when a lower 8-bit compare match occurs.
∑
TMO0 pin output control by bits OIS3, OIS2, OS1, and OS0 in 8TCSR0 is in
accordance with the 16-bit compare match conditions.
∑
TMIO
1
pin output control by bits OIS3, OIS2, OS1, and OS0 in 8TCSR1 is in
accordance with the lower 8-bit compare match conditions.
Setting when Input Capture Occurs
∑
The CMFB flag is set to 1 in 8TCR0 and 8TCR1 when the ICE bit is 1 in 8TCSR1 and
input capture occurs.
∑
TMIO
1
pin input capture input signal edge detection is selected by bits OIS3 and OIS2
in 8TCSR0.
Counter Clear Specification
∑
If counter clear on compare match or input capture has been selected by the CCLR1 and
CCLR0 bits in 8TCR0, the 16-bit counter (both 8TCNT0 and 8TCNT1) is cleared.
∑
The settings of the CCLR1 and CCLR0 bits in 8TCR1 are ignored. The lower 8 bits
cannot be cleared independently.
OVF Flag Operation
∑
The OVF flag is set to 1 in 8TCSR0 when the 16-bit counter (8TCNT0 and 8TCNT1)
overflows (from H'FFFF to H'0000).
∑
The OVF flag is set to 1 in 8TCSR1 when the 8-bit counter (8TCNT1) overflows (from
H'FF to H'00).
∑
Channels 2 and 3:
When bits CKS2 to CKS0 are set to (100) in 8TCR2, the timer functions as a single 16-bit
timer with channel 2 occupying the upper 8 bits and channel 3 occupying the lower 8 bits.
Setting when Compare Match Occurs
∑
The CMF flag is set to 1 in 8TCR2 when a 16-bit compare match occurs.
∑
The CMF flag is set to 1 in 8TCR3 when a lower 8-bit compare match occurs.
∑
TMO
2
pin output control by bits OIS3, OIS2, OS1, and OS0 in 8TCSR2 is in
accordance with the 16-bit compare match conditions.
∑
TMIO
3
pin output control by bits OIS3, OIS2, OS1, and OS0 in 8TCSR3 is in
accordance with the lower 8-bit compare match conditions.

369
Setting when Input Capture Occurs
∑
The CMFB flag is set to 1 in 8TCR2 and 8TCR3 when the ICE bit is 1 in 8TCSR3 and
input capture occurs.
∑
TMIO
3
pin input capture input signal edge detection is selected by bits OIS3 and OIS2
in 8TCSR2.
Counter Clear Specification
∑
If counter clear on compare match has been selected by the CCLR1 and CCLR0 bits in
8TCR2, the 16-bit counter (both 8TCNT2 and 8TCNT3) is cleared.
∑
The settings of the CCLR1 and CCLR0 bits in 8TCR3 are ignored. The lower 8 bits
cannot be cleared independently.
OVF Flag Operation
∑
The OVF flag is set to 1 in 8TCSR2 when the 16-bit counter (8TCNT2 and 8TCNT3)
overflows (from H'FFFF to H'0000).
∑
The OVF flag is set to 1 in 8TCSR3 when the 16-bit counter (8TCNT3) overflows
(from H'FF to H'00).
Compare Match Count Mode
∑
Channels 0 and 1:
When bits CKS2 to CKS0 are set to (100) in 8TCR1, 8TCNT1 counts channel 0 compare
match A events.
Channels 0 and 1 are controlled independently. CMF flag setting, interrupt generation, TMO
pin output, counter clearing, and so on, is in accordance with the settings for each channel.
∑
Channels 2 and 3:
When bits CKS2 to CKS0 are set to (100) in 8TCR3, 8TCNT3 counts channel 2 compare
match A events.
Channels 2 and 3 are controlled independently. CMF flag setting, interrupt generation, TMO
pin output, counter clearing, and so on, is in accordance with the settings for each channel.
Caution
Do not set 16-bit count mode and compare match count mode simultaneously within the same
group, as the 8TCNT input clock will not be generated and the counters will not operate.
10.4.6
Input Capture Setting
The 8TCNT value can be transferred to TCORB on detection of an input edge on the input
capture/output compare pin (TMIO
1
or TMIO
3
). Rising edge, falling edge, or both edge detection
can be selected. In 16-bit count mode, 16-bit input capture can be used.

370
Setting Input Capture Operation in 8-Bit Timer Mode (Normal Operation)
∑
Channel 1:
Set TCORB1 as an 8-bit input capture register with the ICE bit in 8TCSR1.
Select rising edge, falling edge, or both edges as the input edge(s) for the input capture
signal (TMIO
1
) with bits OIS3 and OIS2 in 8TCSR1.
Select the input clock with bits CKS2 to CKS0 in 8TCR1, and start the 8TCNT count.
∑
Channel 3:
Set TCORB3 as an 8-bit input capture register with the ICE bit in 8TCSR3.
Select rising edge, falling edge, or both edges as the input edge(s) for the input capture
signal (TMIO
3
) with bits OIS3 and OIS2 in 8TCSR3.
Select the input clock with bits CKS2 to CKS0 in 8TCR3, and start the 8TCNT count.
Setting Input Capture Operation in 16-Bit Count Mode
∑
Channels 0 and 1:
In 16-bit count mode, TCORB0 and TCORB1 function as a 16-bit input capture register
when the ICE bit is set to 1 in 8TCSR1.
Select rising edge, falling edge, or both edges as the input edge(s) for the input capture
signal (TMIO
1
) with bits OIS3 and OIS2 in 8TCSR0. (In 16-bit count mode, the settings of
bits OIS3 and OIS2 in 8TCSR1 are ignored.)
Select the input clock with bits CKS2 to CKS0 in 8TCR1, and start the 8TCNT count.
∑
Channels 2 and 3:
In 16-bit count mode, TCORB2 and TCORB3 function as a 16-bit input capture register
when the ICE bit is set to 1 in 8TCSR3.
Select rising edge, falling edge, or both edges as the input edge(s) for the input capture
signal (TMIO
3
) with bits OIS3 and OIS2 in 8TCSR2. (In 16-bit count mode, the settings of
bits OIS3 and OIS2 in 8TCSR3 are ignored.)
Select the input clock with bits CKS2 to CKS0 in 8TCR3, and start the 8TCNT count.
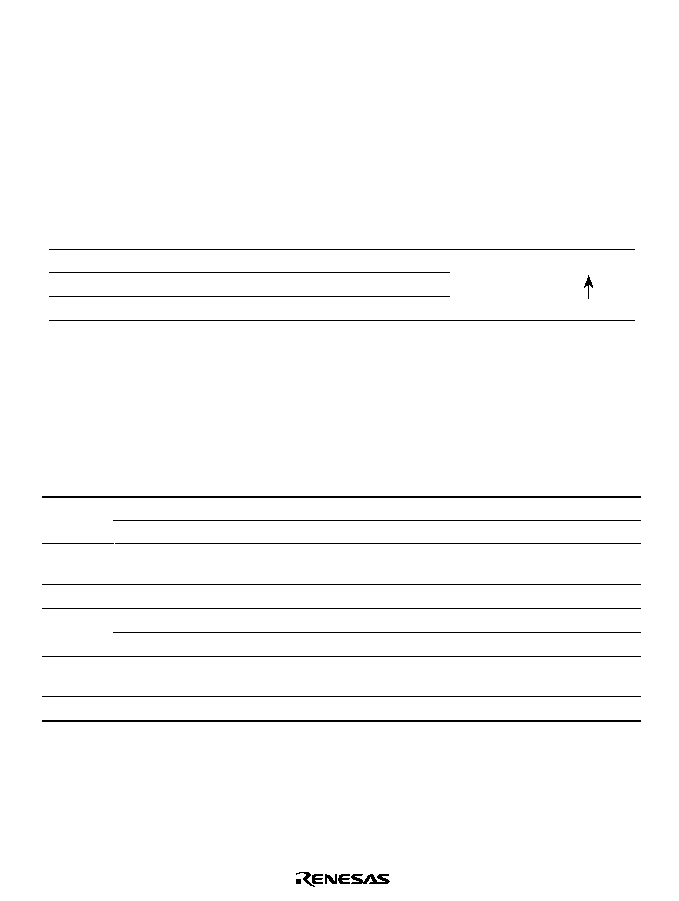
371
10.5
Interrupt
10.5.1
Interrupt Source
The 8-bit timer unit can generate three types of interrupt: compare match A and B (CMIA and
CMIB) and overflow (OVI). Table 10.3 shows the interrupt sources and their priority order. Each
interrupt source is enabled or disabled by the corresponding interrupt enable bit in 8TCR. A
separate interrupt request signal is sent to the interrupt controller by each interrupt source.
Table 10.3
Types of 8-Bit Timer Interrupt Sources and Priority Order
Priority
Interrupt Source
Description
High
CMIA
Interrupt by CMFA
CMIB
Interrupt by CMFB
TOVI
Interrupt by OVF
Low
For compare match interrupts CMIA1/CMIB1 and CMIA3/CMIB3 and the overflow interrupts
(TOVI0/TOVI1 and TOVI2/TOVI3), one vector is shared by two interrupts.
Table 10.4 lists the interrupt sources.
Table 10.4
8-Bit Timer Interrupt Sources
Channel
Interrupt Source
Description
0
CMIA0
TCORA0 compare match
CMIB0
TCORB0 compare match/input capture
1
CMIA1/CMIB1
TCORA1 compare match, or TCORB1 compare match/input
capture
0, 1
TOVI0/TOVI1
Counter 0 or counter 1 overflow
2
CMIA2
TCORA2 compare match
CMIB2
TCORB2 compare match/input capture
3
CMIA3/CMIB3
TCORA3 compare match, or TCORB3 compare match/input
capture
2, 3
TOVI2/TOVI3
Counter 2 or counter 3 overflow
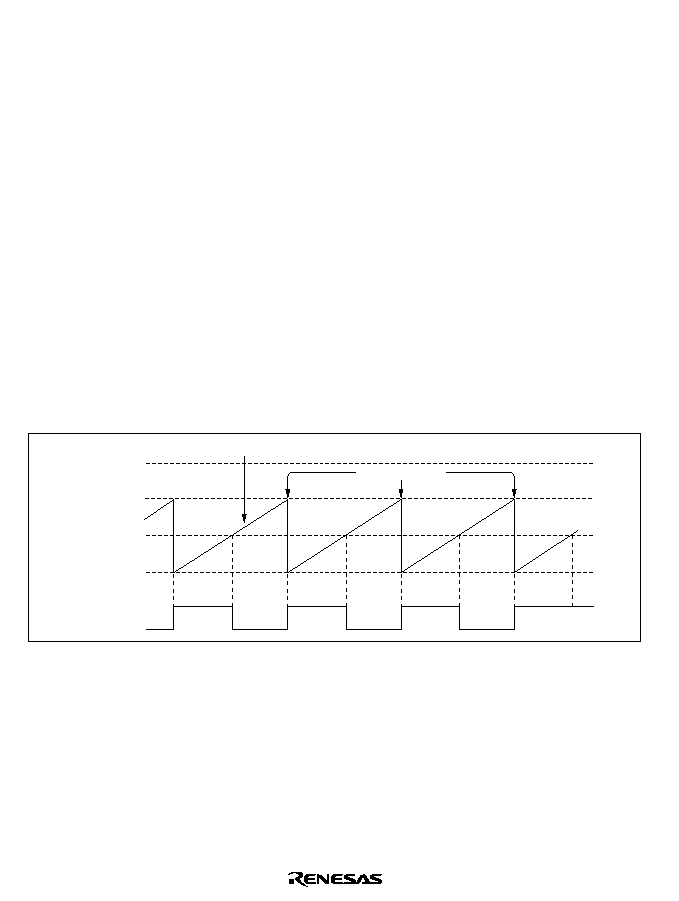
372
10.5.2
A/D Converter Activation
The A/D converter can only be activated by channel 0 compare match A.
When the CMFA flag in 8TCSR0 is set to 1 and the ADTE bit is also set to 1, activation of the
A/D converter will be requested on generation of channel 0 compare match A. If the TRGE bit in
ADCR is set to 1 at this time, the A/D converter will be activated. When ADTE bit in 8TCSR0 is
set to 1, the A/D converter external trigger pin (
ADTRG) input is disabled.
10.6
8-Bit Timer Application Example
Figure 10.17 shows how the 8-bit timer module can be used to output pulses with any desired duty
cycle. The settings for this example are as follows:
∑
Clear the CCLR1 bit to 0 and set the CCLR0 bit to 1 in 8TCR so that 8TCNT is cleared by a
TCORA compare match.
∑
Set bits OIS3, OIS2, OS1, and OS0 to (0110) in 8TCSR so that 1 is output on a TCORA
compare match and 0 is output on a TCORB compare match.
The above settings enable a waveform with the cycle determined by TCORA and the pulse width
detected by TCORB to be output without software intervention.
8TCNT
H'FF
Counter clear
TCORA
TCORB
H'00
TMO
Figure 10.17 Example of Pulse Output

373
10.7
Usage Notes
Note that the following kinds of contention can occur in 8-bit timer operation.
10.7.1
Contention between 8TCNT Write and Clear
If a timer counter clear signal occurs in the T
3
state of a 8TCNT write cycle, clearing of the
counter takes priority and the write is not performed. Figure 10.18 shows the timing in this case.
Address bus
8TCNT address
Internal write signal
Counter clear signal
8TCNT
N
H'00
T
1
T
3
T
2
8TCNT write cycle
Figure 10.18 Contention between 8TCNT Write and Clear

374
10.7.2
Contention between 8TCNT Write and Increment
If an increment pulse occurs in the T
3
state of a 8TCNT write cycle, writing takes priority and
8TCNT is not incremented. Figure 10.19 shows the timing in this case.
Address bus
8TCNT address
Internal write signal
8TCNT input clock
8TCNT
N
M
T
1
T
3
T
2
8TCNT write cycle
8TCNT write data
Figure 10.19 Contention between 8TCNT Write and Increment
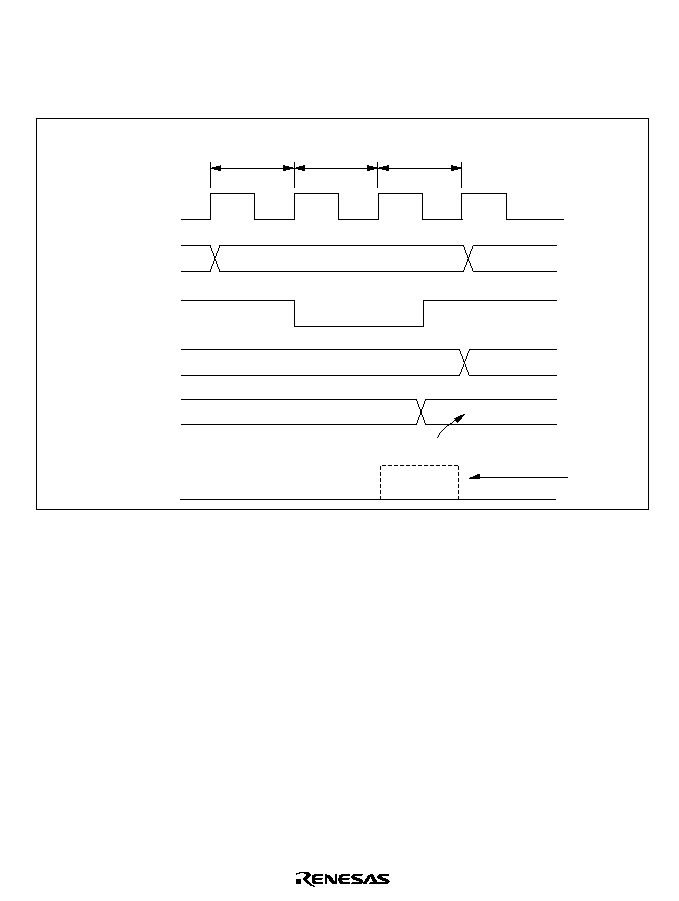
375
10.7.3
Contention between TCOR Write and Compare Match
If a compare match occurs in the T
3
state of a TCOR write cycle, writing takes priority and the
compare match signal is inhibited. Figure 10.20 shows the timing in this case.
Address bus
TCOR address
Internal write signal
8TCNT
TCOR
N
M
T
1
T
3
T
2
TCOR write cycle
TCOR write data
N
N+1
Compare match signal
Inhibited
Figure 10.20 Contention between TCOR Write and Compare Match

376
10.7.4
Contention between TCOR Read and Input Capture
If an input capture signal occurs in the T
3
state of a TCOR read cycle, the value before input
capture is read. Figure 10.21 shows the timing in this case.
Address bus
TCORB address
Internal read signal
Input capture signal
TCORB
N
M
T
1
T
3
T
2
TCORB read cycle
Internal data bus
N
Figure 10.21 Contention between TCOR Read and Input Capture

377
10.7.5
Contention between Counter Clearing by Input Capture and Counter Increment
If an input capture signal and counter increment signal occur simultaneously, counter clearing by
the input capture signal takes priority and the counter is not incremented. The value before the
counter is cleared is transferred to TCORB. Figure 10.22 shows the timing in this case.
Counter clear signal
8TCNT internal clock
8TCNT
N
X
H'00
T
1
T
3
T
2
Input capture signal
TCORB
N
Figure 10.22 Contention between Counter Clearing by Input Capture and Counter
Increment
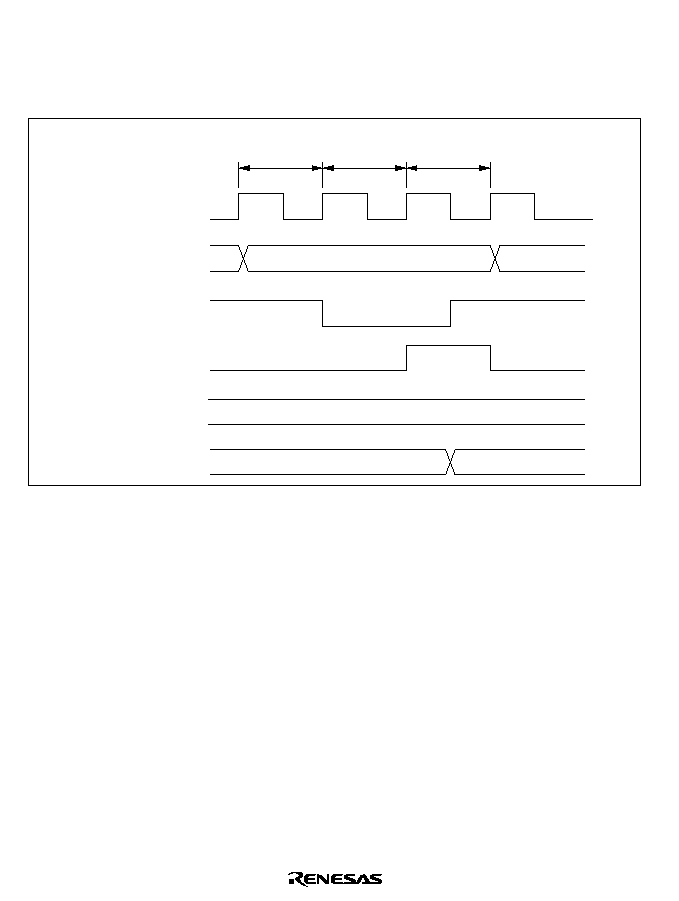
378
10.7.6
Contention between TCOR Write and Input Capture
If an input capture signal occurs in the T
3
state of a TCOR write cycle, input capture takes priority
and the write to TCOR is not performed. Figure 10.23 shows the timing in this case.
Address bus
TCOR address
Internal write signal
Input capture signal
8TCNT
M
T
1
T
3
T
2
TCOR write cycle
TCOR
M
X
Figure 10.23 Contention between TCOR Write and Input Capture
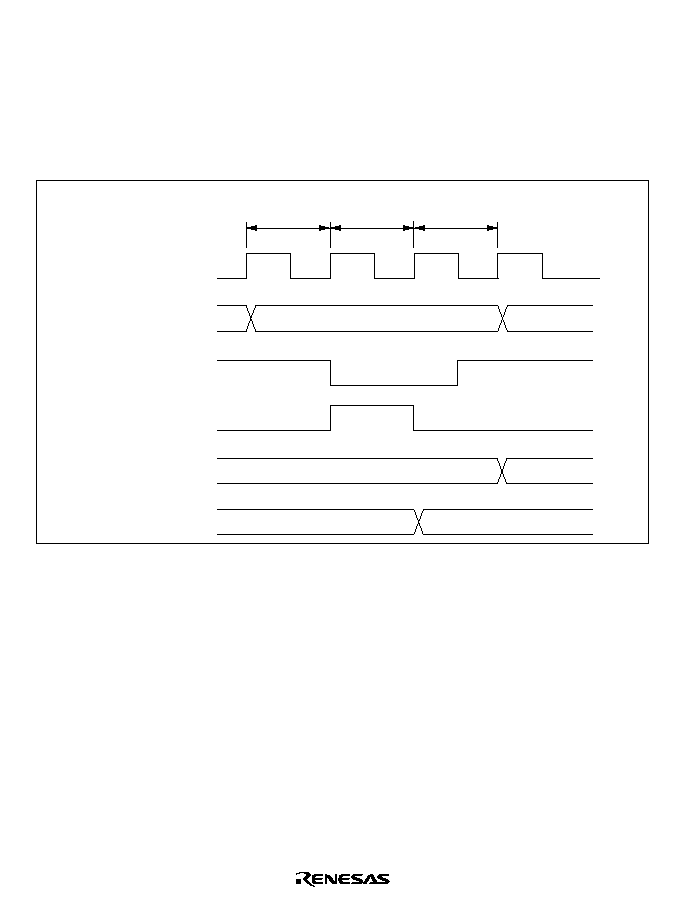
379
10.7.7
Contention between 8TCNT Byte Write and Increment in 16-Bit Count Mode
(Cascaded Connection)
If an increment pulse occurs in the T
2
or T
3
state of a 8TCNT byte write cycle in 16-bit count
mode, writing takes priority and 8TCNT is not incremented. The byte data for which a write was
not performed retains its previous value. Figure 10.24 shows the timing when an increment pulse
occurs in the T
2
state of a byte write to 8TCNTH.
Address bus
8TCNTH address
Internal write signal
8TCNT input clock
8TCNTH
N
8TCNT write data
T
1
T
3
T
2
8TCNTH byte write cycle
8TCNTL
X+1
X
Figure 10.24 Contention between 8TCNT Byte Write and Increment in 16-Bit Count Mode
380
10.7.8
Contention between Compare Matches A and B
If compare matches A and B occur at the same time, the 8-bit timer operates according to the
relative priority of the output states set for compare match A and compare match B, as shown in
Table 10.5.
Table 10.5
Timer Output Priority Order
Priority
Output Setting
High
Toggle output
1 output
0 output
No change
Low
10.7.9
8TCNT Operation at Internal Clock Source Switchover
Switching internal clock sources may cause 8TCNT to increment, depending on the switchover
timing. Table 10.6 shows the relation between the time of the switchover (by writing to bits CKS1
and CKS0) and the operation of 8TCNT.
The 8TCNT input clock is generated from the internal clock source by detecting the rising edge of
the internal clock. If a switchover is made from a low clock source to a high clock source, as in
case No. 3 in Table 10.6, the switchover will be regarded as a falling edge, a 8TCNT clock pulse
will be generated, and 8TCNT will be incremented.
8TCNT may also be incremented when switching between internal and external clocks.
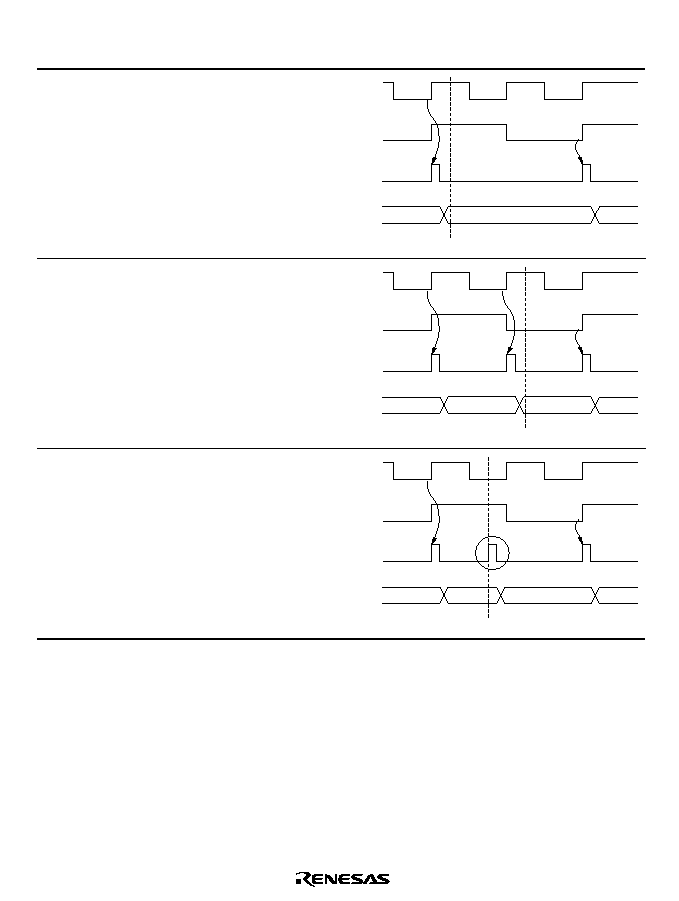
381
Table 10.6
Internal Clock Switchover and 8TCNT Operation
No.
CKS1 and CKS0 Write Timing
8TCNT Operation
1
High
high switchover*
1
Old clock source
New clock source
8TCNT clock
8TCNT
CKS bits rewritten
N
N+1
2
High
low switchover*
2
CKS bits rewritten
N
N+1
N+2
Old clock source
New clock source
8TCNT clock
8TCNT
3
Low
high switchover*
3
N
N+1
N+2
*
4
CKS bits rewritten
Old clock source
New clock source
8TCNT clock
8TCNT

382
No.
CKS1 and CKS0 Write Timing
8TCNT Operation
4
Low
low switchover*
4
N
N+1
N+2
CKS bits rewritten
Old clock source
New clock source
8TCNT clock
8TCNT
Notes: 1. Including switchovers from a high clock source to the halted state, and from the halted
state to a high clock source.
2. Including switchover from the halted state to a low clock source.
3. Including switchover from a low clock source to the halted state.
4. The switchover is regarded as a rising edge, causing 8TCNT to increment.

383
Section 11 Programmable Timing Pattern Controller (TPC)
11.1
Overview
The H8/3006 and H8/3007 have a built-in programmable timing pattern controller (TPC) that
provides pulse outputs by using the 16-bit timer as a time base. The TPC pulse outputs are divided
into 4-bit groups (group 3 to group 0) that can operate simultaneously and independently.
11.1.1
Features
TPC features are listed below.
∑
16-bit output data
Maximum 16-bit data can be output. TPC output can be enabled on a bit-by-bit basis.
∑
Four output groups
Output trigger signals can be selected in 4-bit groups to provide up to four different 4-bit
outputs.
∑
Selectable output trigger signals
Output trigger signals can be selected for each group from the compare match signals of three
16-bit timer channels.
∑
Non-overlap mode
A non-overlap margin can be provided between pulse outputs.
∑
Can operate together with the DMA controller (DMAC)
The compare-match signals selected as trigger signals can activate the DMAC for sequential
output of data without CPU intervention.

384
11.1.2
Block Diagram
Figure 11.1 shows a block diagram of the TPC.
PADDR
NDERA
TPMR
PBDDR
NDERB
TPCR
Internal
data bus
TP
TP
TP
TP
TP
TP
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Control logic
16-bit timer compare match signals
Pulse output
pins, group 3
PBDR
PADR
Legend
TPMR:
TPCR:
NDERB:
NDERA:
PBDDR:
PADDR:
NDRB:
NDRA:
PBDR:
PADR:
Pulse output
pins, group 2
Pulse output
pins, group 1
Pulse output
pins, group 0
TPC output mode register
TPC output control register
Next data enable register B
Next data enable register A
Port B data direction register
Port A data direction register
Next data register B
Next data register A
Port B data register
Port A data register
NDRB
NDRA
TP
TP
TP
TP
TP
TP
TP
TP
TP
TP
Figure 11.1 TPC Block Diagram
385
11.1.3
Pin Configuration
Table 11.1 summarizes the TPC output pins.
Table 11.1
TPC Pins
Name
Symbol
I/O
Function
TPC output 0
TP
0
Output
Group 0 pulse output
TPC output 1
TP
1
Output
TPC output 2
TP
2
Output
TPC output 3
TP
3
Output
TPC output 4
TP
4
Output
Group 1 pulse output
TPC output 5
TP
5
Output
TPC output 6
TP
6
Output
TPC output 7
TP
7
Output
TPC output 8
TP
8
Output
Group 2 pulse output
TPC output 9
TP
9
Output
TPC output 10
TP
10
Output
TPC output 11
TP
11
Output
TPC output 12
TP
12
Output
Group 3 pulse output
TPC output 13
TP
13
Output
TPC output 14
TP
14
Output
TPC output 15
TP
15
Output

386
11.1.4
Register Configuration
Table 11.2 summarizes the TPC registers.
Table 11.2
TPC Registers
Address*
1
Name
Abbreviation
R/W
Function
H'EE009
Port A data direction register
PADDR
W
H'00
H'FFFD9
Port A data register
PADR
R/(W)*
2
H'00
H'EE00A
Port B data direction register
PBDDR
W
H'00
H'FFFDA
Port B data register
PBDR
R/(W)*
2
H'00
H'FFFA0
TPC output mode register
TPMR
R/W
H'F0
H'FFFA1
TPC output control register
TPCR
R/W
H'FF
H'FFFA2
Next data enable register B
NDERB
R/W
H'00
H'FFFA3
Next data enable register A
NDERA
R/W
H'00
H'FFFA5/
H'FFFA7*
3
Next data register A
NDRA
R/W
H'00
H'FFFA4/
H'FFFA6*
3
Next data register B
NDRB
R/W
H'00
Notes: 1. Lower 20 bits of the address in advanced mode.
2. Bits used for TPC output cannot be written.
3. The NDRA address is H'FFFA5 when the same output trigger is selected for TPC
output groups 0 and 1 by settings in TPCR. When the output triggers are different, the
NDRA address is H'FFFA7 for group 0 and H'FFFA5 for group 1. Similarly, the address
of NDRB is H'FFFA4 when the same output trigger is selected for TPC output groups 2
and 3 by settings in TPCR. When the output triggers are different, the NDRB address is
H'FFFA6 for group 2 and H'FFFA4 for group 3.

387
11.2
Register Descriptions
11.2.1
Port A Data Direction Register (PADDR)
PADDR is an 8-bit write-only register that selects input or output for each pin in port A.
Bit
Initial value
Read/Write
7
PA DDR
0
W
Port A data direction 7 to 0
These bits select input or
output for port A pins
7
6
PA DDR
0
W
6
5
PA DDR
0
W
5
4
PA DDR
0
W
4
3
PA DDR
0
W
3
2
PA DDR
0
W
2
1
PA DDR
0
W
1
0
PA DDR
0
W
0
Port A is multiplexed with pins TP
7
to TP
0
. Bits corresponding to pins used for TPC output must
be set to 1. For further information about PADDR, see section 8.7, Port A.
11.2.2
Port A Data Register (PADR)
PADR is an 8-bit readable/writable register that stores TPC output data for groups 0 and 1, when
these TPC output groups are used.
Bit
Initial value
Read/Write
0
PA
0
R/(W)
0
1
PA
0
R/(W)
1
2
PA
0
R/(W)
2
3
PA
0
R/(W)
3
4
PA
0
R/(W)
4
5
PA
0
R/(W)
5
6
PA
0
R/(W)
6
7
PA
0
R/(W)
7
Port A data 7 to 0
These bits store output data
for TPC output groups 0 and 1
*
*
*
*
*
*
*
*
Note: Bits selected for TPC output by NDERA settings become read-only bits.
*
For further information about PADR, see section 8.7, Port A.

388
11.2.3
Port B Data Direction Register (PBDDR)
PBDDR is an 8-bit write-only register that selects input or output for each pin in port B.
Bit
Initial value
Read/Write
7
PB DDR
0
W
Port B data direction 7 to 0
These bits select input or
output for port B pins
7
6
PB DDR
0
W
6
5
PB DDR
0
W
5
4
PB DDR
0
W
4
3
PB DDR
0
W
3
2
PB DDR
0
W
2
1
PB DDR
0
W
1
0
PB DDR
0
W
0
Port B is multiplexed with pins TP
15
to TP
8
. Bits corresponding to pins used for TPC output must
be set to 1. For further information about PBDDR, see section 8.8, Port B.
11.2.4
Port B Data Register (PBDR)
PBDR is an 8-bit readable/writable register that stores TPC output data for groups 2 and 3, when
these TPC output groups are used.
Bit
Initial value
Read/Write
0
PB
0
R/(W)
0
1
PB
0
R/(W)
1
2
PB
0
R/(W)
2
3
PB
0
R/(W)
3
4
PB
0
R/(W)
4
5
PB
0
R/(W)
5
6
PB
0
R/(W)
6
7
PB
0
R/(W)
7
Port B data 7 to 0
These bits store output data
for TPC output groups 2 and 3
*
*
*
*
*
*
*
*
Note: Bits selected for TPC output by NDERB settings become read-only bits.
*
For further information about PBDR, see section 8.8, Port B.
389
11.2.5
Next Data Register A (NDRA)
NDRA is an 8-bit readable/writable register that stores the next output data for TPC output groups
1 and 0 (pins TP
7
to TP
0
). During TPC output, when an 16-bit timer compare match event
specified in TPCR occurs, NDRA contents are transferred to the corresponding bits in PADR. The
address of NDRA differs depending on whether TPC output groups 0 and 1 have the same output
trigger or different output triggers.
NDRA is initialized to H'00 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Same Trigger for TPC Output Groups 0 and 1: If TPC output groups 0 and 1 are triggered by
the same compare match event, the NDRA address is H'FFFA5. The upper 4 bits belong to group
1 and the lower 4 bits to group 0. Address H'FFFA7 consists entirely of reserved bits that cannot
be modified and always read 1.
Address H'FFFA5
Bit
Initial value
Read/Write
7
NDR7
0
R/W
6
NDR6
0
R/W
5
NDR5
0
R/W
4
NDR4
0
R/W
3
NDR3
0
R/W
2
NDR2
0
R/W
1
NDR1
0
R/W
0
NDR0
0
R/W
Next data 3 to 0
These bits store the next output
data for TPC output group 0
Next data 7 to 4
These bits store the next output
data for TPC output group 1
Address H'FFFA7
Bit
Initial value
Read/Write
0
--
1
--
1
--
1
--
2
--
1
--
3
--
1
--
4
--
1
--
5
--
1
--
6
--
1
--
7
--
1
--
Reserved bits
390
Different Triggers for TPC Output Groups 0 and 1: If TPC output groups 0 and 1 are triggered
by different compare match events, the address of the upper 4 bits of NDRA (group 1) is H'FFFA5
and the address of the lower 4 bits (group 0) is H'FFFA7. Bits 3 to 0 of address H'FFFA5 and bits
7 to 4 of address H'FFFA7 are reserved bits that cannot be modified and always read 1.
Address H'FFFA5
Bit
Initial value
Read/Write
7
NDR7
0
R/W
6
NDR6
0
R/W
5
NDR5
0
R/W
4
NDR4
0
R/W
3
--
1
--
2
--
1
--
1
--
1
--
0
--
1
--
Reserved bits
Next data 7 to 4
These bits store the next output
data for TPC output group 1
Address H'FFFA7
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
NDR3
0
R/W
2
NDR2
0
R/W
1
NDR1
0
R/W
0
NDR0
0
R/W
Next data 3 to 0
These bits store the next output
data for TPC output group 0
Reserved bits
391
11.2.6 Next Data Register B (NDRB)
NDRB is an 8-bit readable/writable register that stores the next output data for TPC output groups
3 and 2 (pins TP
15
to TP
8
). During TPC output, when an 16-bit timer compare match event
specified in TPCR occurs, NDRB contents are transferred to the corresponding bits in PBDR. The
address of NDRB differs depending on whether TPC output groups 2 and 3 have the same output
trigger or different output triggers.
NDRB is initialized to H'00 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Same Trigger for TPC Output Groups 2 and 3: If TPC output groups 2 and 3 are triggered by
the same compare match event, the NDRB address is H'FFFA4. The upper 4 bits belong to group
3 and the lower 4 bits to group 2. Address H'FFFA6 consists entirely of reserved bits that cannot
be modified and always read 1.
Address H'FFFA4
Bit
Initial value
Read/Write
7
NDR15
0
R/W
6
NDR14
0
R/W
5
NDR13
0
R/W
4
NDR12
0
R/W
3
NDR11
0
R/W
2
NDR10
0
R/W
1
NDR9
0
R/W
0
NDR8
0
R/W
Next data 11 to 8
These bits store the next output
data for TPC output group 2
Next data 15 to 12
These bits store the next output
data for TPC output group 3
Address H'FFFA6
Bit
Initial value
Read/Write
0
--
1
--
1
--
1
--
2
--
1
--
3
--
1
--
4
--
1
--
5
--
1
--
6
--
1
--
7
--
1
--
Reserved bits
392
Different Triggers for TPC Output Groups 2 and 3: If TPC output groups 2 and 3 are triggered
by different compare match events, the address of the upper 4 bits of NDRB (group 3) is H'FFFA4
and the address of the lower 4 bits (group 2) is H'FFFA6. Bits 3 to 0 of address H'FFFA4 and bits
7 to 4 of address H'FFFA6 are reserved bits that cannot be modified and always read 1.
Address H'FFFA4
Bit
Initial value
Read/Write
7
NDR15
0
R/W
6
NDR14
0
R/W
5
NDR13
0
R/W
4
NDR12
0
R/W
3
--
1
--
2
--
1
--
1
--
1
--
0
--
1
--
Reserved bits
Next data 15 to 12
These bits store the next output
data for TPC output group 3
Address H'FFFA6
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
NDR11
0
R/W
2
NDR10
0
R/W
1
NDR9
0
R/W
0
NDR8
0
R/W
Next data 11 to 8
These bits store the next output
data for TPC output group 2
Reserved bits

393
11.2.7
Next Data Enable Register A (NDERA)
NDERA is an 8-bit readable/writable register that enables or disables TPC output groups 1 and 0
(TP
7
to TP
0
) on a bit-by-bit basis.
Bit
Initial value
Read/Write
0
NDER0
0
R/W
1
NDER1
0
R/W
2
NDER2
0
R/W
3
NDER3
0
R/W
4
NDER4
0
R/W
5
NDER5
0
R/W
6
NDER6
0
R/W
7
NDER7
0
R/W
Next data enable 7 to 0
These bits enable or disable
TPC output groups 1 and 0
If a bit is enabled for TPC output by NDERA, then when the 16-bit timer compare match event
selected in the TPC output control register (TPCR) occurs, the NDRA value is automatically
transferred to the corresponding PADR bit, updating the output value. If TPC output is disabled,
the bit value is not transferred from NDRA to PADR and the output value does not change.
NDERA is initialized to H'00 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bits 7 to 0--Next Data Enable 7 to 0 (NDER7 to NDER0): These bits enable or disable TPC
output groups 1 and 0 (TP
7
to TP
0
) on a bit-by-bit basis.
Bits 7 to 0
NDER7 to NDER0
Description
0
TPC outputs TP
7
to TP
0
are disabled
(NDR7 to NDR0 are not transferred to PA
7
to PA
0
)
(Initial value)
1
TPC outputs TP
7
to TP
0
are enabled
(NDR7 to NDR0 are transferred to PA
7
to PA
0
)
394
11.2.8 Next Data Enable Register B (NDERB)
NDERB is an 8-bit readable/writable register that enables or disables TPC output groups 3 and 2
(TP
15
to TP
8
) on a bit-by-bit basis.
Bit
Initial value
Read/Write
0
NDER8
0
R/W
1
NDER9
0
R/W
2
NDER10
0
R/W
3
NDER11
0
R/W
4
NDER12
0
R/W
5
NDER13
0
R/W
6
NDER14
0
R/W
7
NDER15
0
R/W
Next data enable 15 to 8
These bits enable or disable
TPC output groups 3 and 2
If a bit is enabled for TPC output by NDERB, then when the 16-bit timer compare match event
selected in the TPC output control register (TPCR) occurs, the NDRB value is automatically
transferred to the corresponding PBDR bit, updating the output value. If TPC output is disabled,
the bit value is not transferred from NDRB to PBDR and the output value does not change.
NDERB is initialized to H'00 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bits 7 to 0--Next Data Enable 15 to 8 (NDER15 to NDER8): These bits enable or disable TPC
output groups 3 and 2 (TP
15
to TP
8
) on a bit-by-bit basis.
Bits 7 to 0
NDER15 to NDER8
Description
0
TPC outputs TP
15
to TP
8
are disabled
(NDR15 to NDR8 are not transferred to PB
7
to PB
0
)
(Initial value)
1
TPC outputs TP
15
to TP
8
are enabled
(NDR15 to NDR8 are transferred to PB
7
to PB
0
)
395
11.2.9
TPC Output Control Register (TPCR)
TPCR is an 8-bit readable/writable register that selects output trigger signals for TPC outputs on a
group-by-group basis.
Bit
Initial value
Read/Write
7
G3CMS1
1
R/W
6
G3CMS0
1
R/W
5
G2CMS1
1
R/W
4
G2CMS0
1
R/W
3
G1CMS1
1
R/W
0
G0CMS0
1
R/W
2
G1CMS0
1
R/W
1
G0CMS1
1
R/W
Group 3 compare
match select 1 and 0
These bits select
the compare match
event that triggers
TPC output group 3
(TP to TP )
Group 2 compare
match select 1 and 0
These bits select
the compare match
event that triggers
TPC output group 2
(TP to TP )
Group 1 compare
match select 1 and 0
These bits select
the compare match
event that triggers
TPC output group 1
(TP to TP )
Group 0 compare
match select 1 and 0
These bits select
the compare match
event that triggers
TPC output group 0
(TP to TP )
15
12
11
8
7
4
3
0
TPCR is initialized to H'FF by a reset and in hardware standby mode. It is not initialized in
software standby mode.
396
Bits 7 and 6--Group 3 Compare Match Select 1 and 0 (G3CMS1, G3CMS0): These bits
select the compare match event that triggers TPC output group 3 (TP
15
to TP
12
).
Bit 7
G3CMS1
Bit 6
G3CMS0
Description
0
0
TPC output group 3 (TP
15
to TP
12
) is triggered by compare match in 16-bit
timer channel 0
1
TPC output group 3 (TP
15
to TP
12
) is triggered by compare match in 16-bit
timer channel 1
1
0
TPC output group 3 (TP
15
to TP
12
) is triggered by compare match in 16-bit
timer channel 2
1
TPC output group 3 (TP
15
to TP
12
) is triggered by
compare match in 16-bit timer channel 2
(Initial value)
Bits 5 and 4--Group 2 Compare Match Select 1 and 0 (G2CMS1, G2CMS0): These bits
select the compare match event that triggers TPC output group 2 (TP
11
to TP
8
).
Bit 5
G2CMS1
Bit 4
G2CMS0
Description
0
0
TPC output group 2 (TP
11
to TP
8
) is triggered by compare match in 16-bit
timer channel 0
1
TPC output group 2 (TP
11
to TP
8
) is triggered by compare match in 16-bit
timer channel 1
1
0
TPC output group 2 (TP
11
to TP
8
) is triggered by compare match in 16-bit
timer channel 2
1
TPC output group 2 (TP
11
to TP
8
) is triggered by
compare match in 16-bit timer channel 2
(Initial value)
397
Bits 3 and 2--Group 1 Compare Match Select 1 and 0 (G1CMS1, G1CMS0): These bits
select the compare match event that triggers TPC output group 1 (TP
7
to TP
4
).
Bit 3
G1CMS1
Bit 2
G1CMS0
Description
0
0
TPC output group 1 (TP
7
to TP
4
) is triggered by compare match in 16-bit
timer channel 0
1
TPC output group 1 (TP
7
to TP
4
) is triggered by compare match in 16-bit
timer channel 1
1
0
TPC output group 1 (TP
7
to TP
4
) is triggered by compare match in 16-bit
timer channel 2
1
TPC output group 1 (TP
7
to TP
4
) is triggered by
compare match in 16-bit timer channel 2
(Initial value)
Bits 1 and 0--Group 0 Compare Match Select 1 and 0 (G0CMS1, G0CMS0): These bits
select the compare match event that triggers TPC output group 0 (TP
3
to TP
0
).
Bit 1
G0CMS1
Bit 0
G0CMS0
Description
0
0
TPC output group 0 (TP
3
to TP
0
) is triggered by compare match in 16-bit
timer channel 0
1
TPC output group 0 (TP
3
to TP
0
) is triggered by compare match in 16-bit
timer channel 1
1
0
TPC output group 0 (TP
3
to TP
0
) is triggered by compare match in 16-bit
timer channel 2
1
TPC output group 0 (TP
3
to TP
0
) is triggered by
compare match in 16-bit timer channel 2
(Initial value)

398
11.2.10
TPC Output Mode Register (TPMR)
TPMR is an 8-bit readable/writable register that selects normal or non-overlapping TPC output for
each group.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
G3NOV
0
R/W
0
G0NOV
0
R/W
2
G2NOV
0
R/W
1
G1NOV
0
R/W
Group 3 non-overlap
Selects non-overlapping TPC
output for group 3 (TP to TP )
Reserved bits
Group 2 non-overlap
Selects non-overlapping TPC
output for group 2 (TP to TP )
Group 1 non-overlap
Selects non-overlapping TPC
output for group 1 (TP to TP )
Group 0 non-overlap
Selects non-overlapping TPC
output for group 0 (TP to TP )
15
12
11
8
7
4
3
0
The output trigger period of a non-overlapping TPC output waveform is set in general register B
(GRB) in the 16-bit timer channel selected for output triggering. The non-overlap margin is set in
general register A (GRA). The output values change at compare match A and B. For details see
section 11.3.4, Non-Overlapping TPC Output.
TPMR is initialized to H'F0 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bits 7 to 4--Reserved: These bits cannot be modified and are always read as 1.
399
Bit 3--Group 3 Non-Overlap (G3NOV): Selects normal or non-overlapping TPC output for
group 3 (TP
15
to TP
12
).
Bit 3
G3NOV
Description
0
Normal TPC output in group 3 (output values change at
compare match A in the selected 16-bit timer channel)
(Initial value)
1
Non-overlapping TPC output in group 3 (independent 1 and 0 output at
compare match A and B in the selected 16-bit timer channel)
Bit 2--Group 2 Non-Overlap (G2NOV): Selects normal or non-overlapping TPC output for
group 2 (TP
11
to TP
8
).
Bit 2
G2NOV
Description
0
Normal TPC output in group 2 (output values change at
compare match A in the selected 16-bit timer channel)
(Initial value)
1
Non-overlapping TPC output in group 2 (independent 1 and 0 output at
compare match A and B in the selected 16-bit timer channel)
Bit 1--Group 1 Non-Overlap (G1NOV): Selects normal or non-overlapping TPC output for
group 1 (TP
7
to TP
4
).
Bit 1
G1NOV
Description
0
Normal TPC output in group 1 (output values change at
compare match A in the selected 16-bit timer channel)
(Initial value)
1
Non-overlapping TPC output in group 1 (independent 1 and 0 output at
compare match A and B in the selected 16-bit timer channel)
Bit 0--Group 0 Non-Overlap (G0NOV): Selects normal or non-overlapping TPC output for
group 0 (TP
3
to TP
0
).
Bit 0
G0NOV
Description
0
Normal TPC output in group 0 (output values change at
compare match A in the selected 16-bit timer channel)
(Initial value)
1
Non-overlapping TPC output in group 0 (independent 1 and 0 output at
compare match A and B in the selected 16-bit timer channel)

400
11.3
Operation
11.3.1
Overview
When corresponding bits in PADDR or PBDDR and NDERA or NDERB are set to 1, TPC output
is enabled. The TPC output initially consists of the corresponding PADR or PBDR contents.
When a compare-match event selected in TPCR occurs, the corresponding NDRA or NDRB bit
contents are transferred to PADR or PBDR to update the output values.
Figure 11.2 illustrates the TPC output operation. Table 11.3 summarizes the TPC operating
conditions.
DDR
NDER
Q
Q
TPC output pin
DR
NDR
C
Q
D
Q
D
Internal
data bus
Output trigger signal
Figure 11.2 TPC Output Operation
Table 11.3
TPC Operating Conditions
NDER
DDR
Pin Function
0
0
Generic input port
1
Generic output port
1
0
Generic input port (but the DR bit is a read-only bit, and when compare
match occurs, the NDR bit value is transferred to the DR bit)
1
TPC pulse output
Sequential output of up to 16-bit patterns is possible by writing new output data to NDRA and
NDRB before the next compare match. For information on non-overlapping operation, see
section 11.3.4, Non-Overlapping TPC Output.
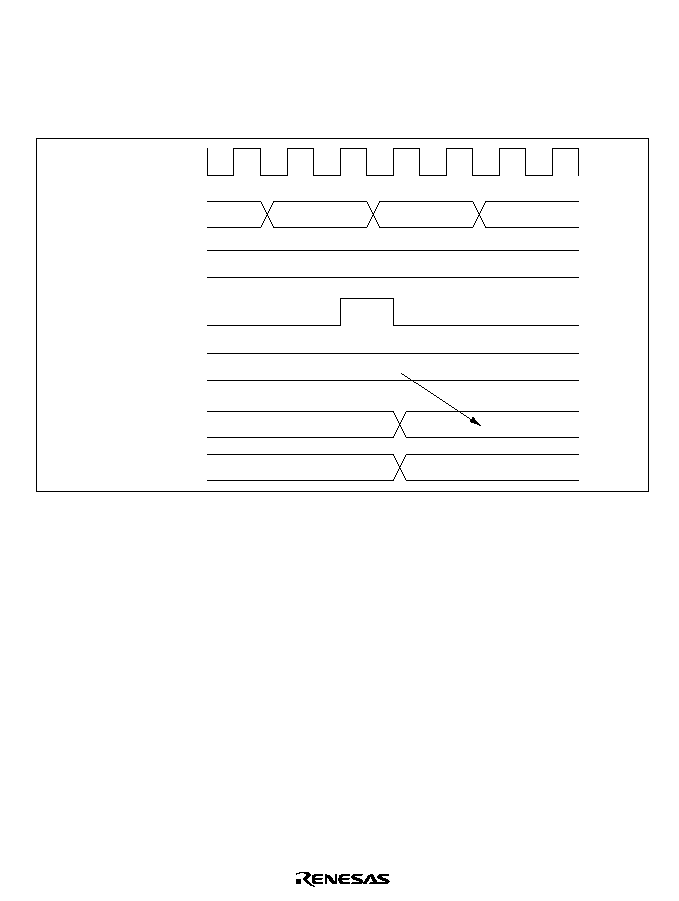
401
11.3.2
Output Timing
If TPC output is enabled, NDRA/NDRB contents are transferred to PADR/PBDR and output
when the selected compare match event occurs. Figure 11.3 shows the timing of these operations
for the case of normal output in groups 2 and 3, triggered by compare match A.
16TCNT
GRA
Compare
match A signal
NDRB
PBDR
TP to TP
8
15
N
N
n
m
m
N + 1
n
n
Figure 11.3 Timing of Transfer of Next Data Register Contents and Output (Example)
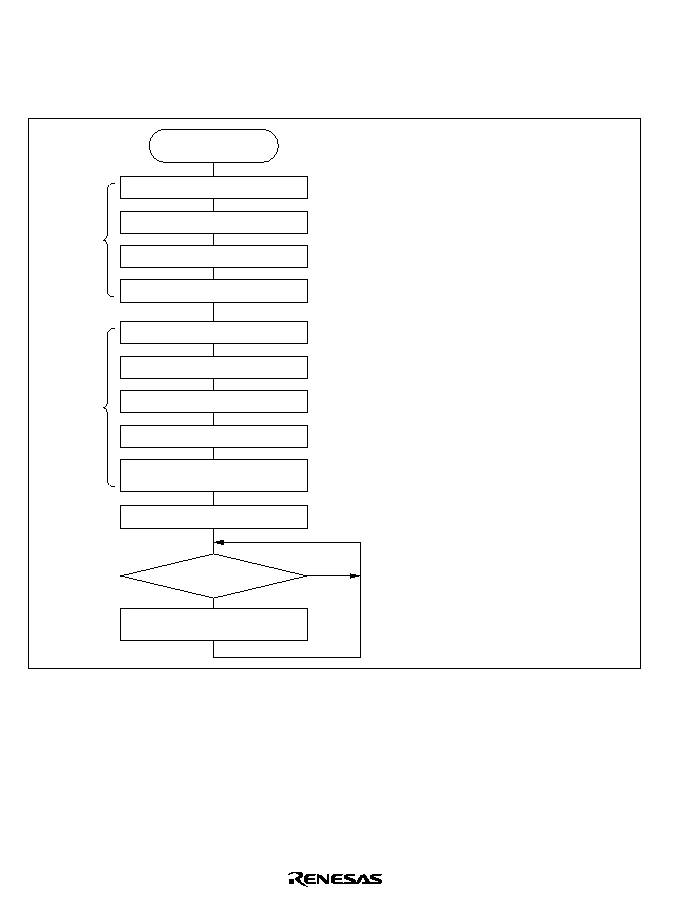
402
11.3.3
Normal TPC Output
Sample Setup Procedure for Normal TPC Output: Figure 11.4 shows a sample procedure for
setting up normal TPC output.
Normal TPC output
Set next TPC output data
Compare match?
No
Yes
Set next TPC output data
16-bit timer
setup
16-bit timer
setup
Port and
TPC setup
10
11
9
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
Set TIOR to make GRA an output compare
register (with output inhibited).
Set the TPC output trigger period.
Select the counter clock source with bits
TPSC2 to TPSC0 in 16TCR. Select the counter
clear source with bits CCLR1 and CCLR0.
Enable the IMFA interrupt in TIER.
The DMAC can also be set up to transfer
data to the next data register.
Set the initial output values in the DR bits
of the input/output port pins to be used for
TPC output.
Set the DDR bits of the input/output port
pins to be used for TPC output to 1.
Set the NDER bits of the pins to be used for
TPC output to 1.
Select the 16-bit timer compare match event
to be used as the TPC output trigger in TPCR.
Set the next TPC output values in the NDR bits.
Set the STR bit to 1 in TSTR to start the
timer counter.
At each IMFA interrupt, set the next output
values in the NDR bits.
1
2
3
4
5
6
7
8
Select GR functions
Set GRA value
Select counting operation
Select interrupt request
Start counter
Set initial output data
Select port output
Enable TPC output
Select TPC output trigger
Figure 11.4 Setup Procedure for Normal TPC Output (Example)
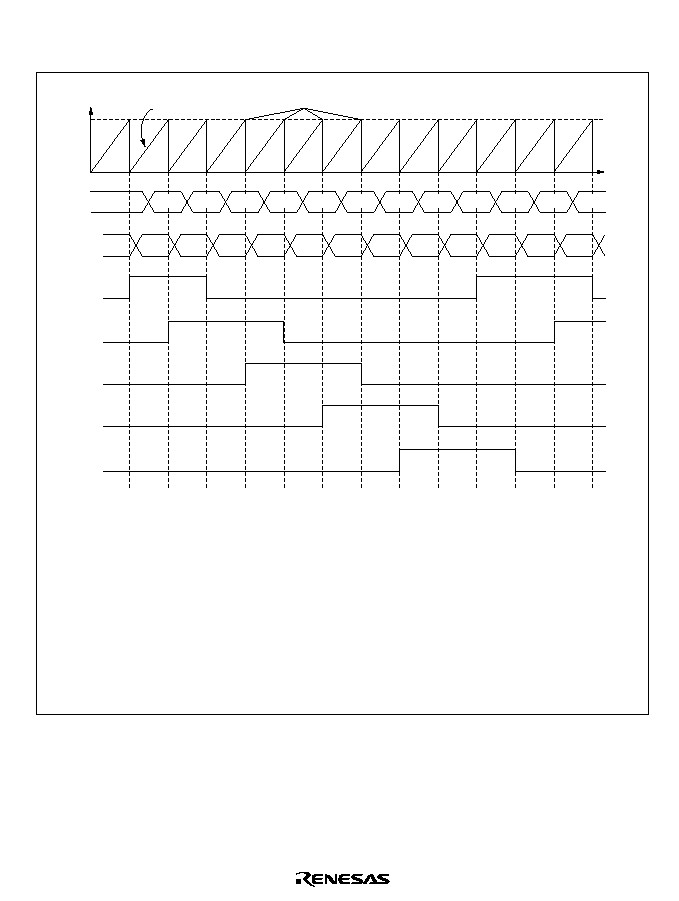
403
Example of Normal TPC Output (Example of Five-Phase Pulse Output): Figure 11.5 shows
an example in which the TPC is used for cyclic five-phase pulse output.
GRA
H'0000
NDRB
PBDR
TP
15
TP
14
TP
13
TP
12
TP
11
∑
∑
∑
∑
Time
80
TCNT
TCNT value
C0
40
60
20
30
10
18
08
88
80
C0
Compare match
The 16-bit timer channel to be used as the output trigger channel is set up so that GRA is an output
compare register and the counter will be cleared by compare match A. The trigger period is set in GRA.
The IMIEA bit is set to 1 in TIER to enable the compare match A interrupt.
H'F8 is written in PBDDR and NDERB, and bits G3CMS1, G3CMS0, G2CMS1, and G2CMS0 are set in
TPCR to select compare match in the 16-bit timer channel set up in step 1 as the output trigger.
Output data H'80 is written in NDRB.
The timer counter in this 16-bit timer channel is started. When compare match A occurs, the NDRB
contents are transferred to PBDR and output. The compare match/input capture A (IMFA) interrupt
service routine writes the next output data (H'C0) in NDRB.
Five-phase overlapping pulse output (one or two phases active at a time) can be obtained by writing
H'40, H'60, H'20, H'30, H'10, H'18, H'08, H'88... at successive IMFA interrupts. If the DMAC is set for
activation by this interrupt, pulse output can be obtained without loading the CPU.
00
80
C0
40
60
20
30
10
18
08
88
80
C0
40
Figure 11.5 Normal TPC Output Example (Five-Phase Pulse Output)
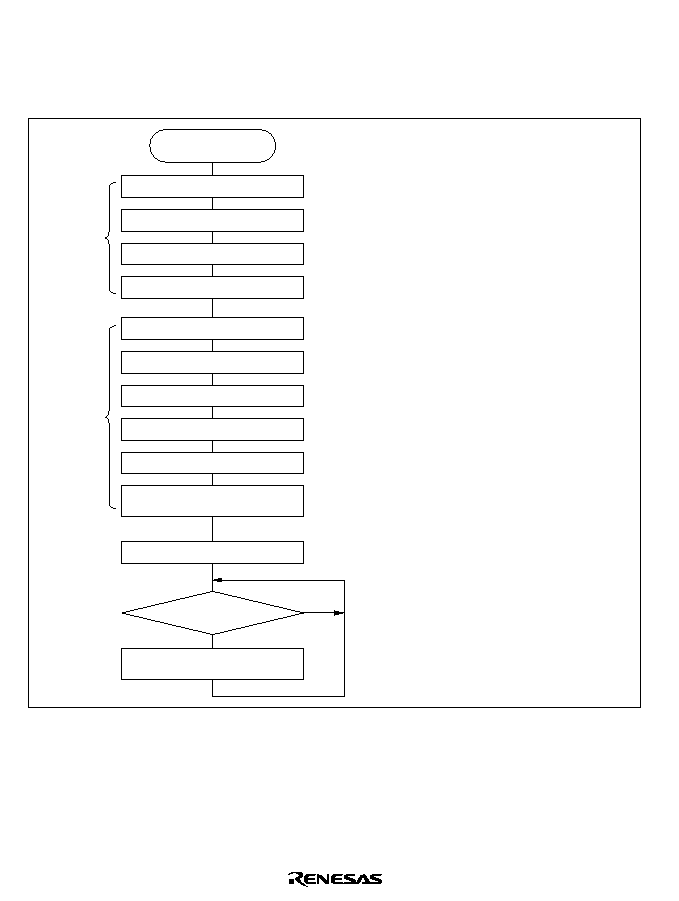
404
11.3.4
Non-Overlapping TPC Output
Sample Setup Procedure for Non-Overlapping TPC Output: Figure 11.6 shows a sample
procedure for setting up non-overlapping TPC output.
Non-overlapping
TPC output
Set next TPC output data
Compare match A?
No
Yes
Set next TPC output data
Start counter
16-bit timer
setup
16-bit timer
setup
Port and
TPC setup
Set initial output data
Set up TPC output
Enable TPC transfer
Select TPC transfer trigger
Select non-overlapping groups
1
2
3
4
12
10
11
5
6
7
8
9
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
Set TIOR to make GRA and GRB output
compare registers (with output inhibited).
Set the TPC output trigger period in GRB
and the non-overlap margin in GRA.
Select the counter clock source with bits
TPSC2 to TPSC0 in 16TCR. Select the counter
clear source with bits CCLR1 and CCLR0.
Enable the IMFA interrupt in TISRA.
The DMAC can also be set up to transfer
data to the next data register.
Set the initial output values in the DR bits
of the input/output port pins to be used for
TPC output.
Set the DDR bits of the input/output port pins
to be used for TPC output to 1.
Set the NDER bits of the pins to be used for
TPC output to 1.
In TPCR, select the 16-bit timer compare match
event to be used as the TPC output trigger.
In TPMR, select the groups that will operate
in non-overlap mode.
Set the next TPC output values in the NDR
bits.
Set the STR bit to 1 in TSTR to start the timer
counter.
At each IMFA interrupt, write the next output
value in the NDR bits.
Select GR functions
Set GR values
Select counting operation
Select interrupt requests
Figure 11.6 Setup Procedure for Non-Overlapping TPC Output (Example)
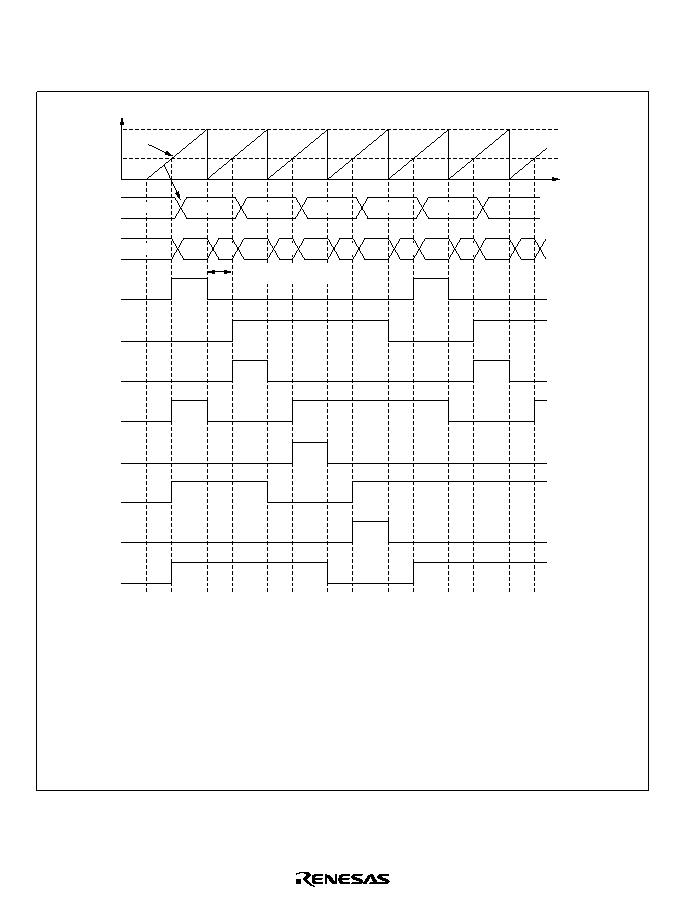
405
Example of Non-Overlapping TPC Output (Example of Four-Phase Complementary Non-
Overlapping Output): Figure 11.7 shows an example of the use of TPC output for four-phase
complementary non-overlapping pulse output.
GRB
H'0000
NDRB
PBDR
TP
15
TP
14
TP
13
TP
12
TP
11
TP
10
TP
9
TP
8
Time
95
00
65
95
59
56
95
65
05
65
41
59
50
56
14
95
05
65
16TCNT
period is set in GRB. The non-overlap margin is set in GRA. The IMIEA bit is set to 1 in TISRA to enable
IMFA interrupts.
H'FF is written in PBDDR and NDERB, and bits G3CMS1, G3CMS0, G2CMS1, and G2CMS0 are set in
TPCR to select compare match in the 16-bit timer channel set up in step 1 as the output trigger. Bits
G3NOV and G2NOV are set to 1 in TPMR to select non-overlapping output. Output data H'95 is written in
NDRB.
16TCNT value
Non-overlap margin
The 16-bit timer channel to be used as the output trigger channel is set up so that GRA and GRB are
output compare registers and the counter will be cleared by compare match B. The TPC output trigger
∑
∑
∑
∑
The timer counter in this 16-bit timer channel is started. When compare match B occurs, outputs change
from 1 to 0. When compare match A occurs, outputs change from 0 to 1 (the change from 0 to 1 is delayed
by the value of GRA). The IMFA interrupt service routine writes the next output data (H'65) in NDRB.
Four-phase complementary non-overlapping pulse output can be obtained by writing H'59, H'56, H'95...
at successive IMFA interrupts. If the DMAC is set for activation by this interrupt, pulse output can be
obtained without loading the CPU.
GRA
Figure 11.7 Non-Overlapping TPC Output Example (Four-Phase Complementary
Non-Overlapping Pulse Output)
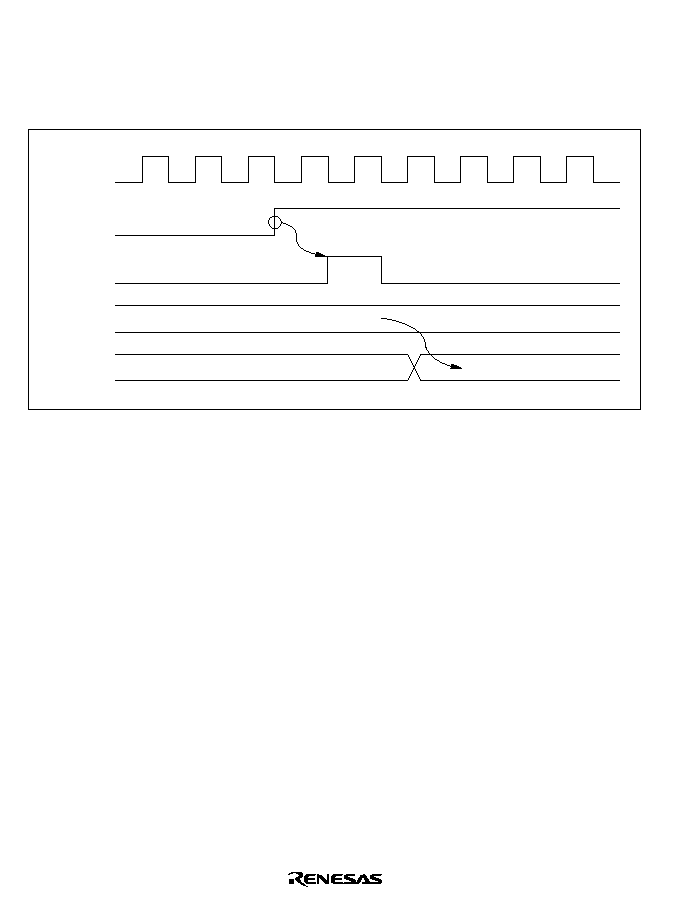
406
11.3.5
TPC Output Triggering by Input Capture
TPC output can be triggered by 16-bit timer input capture as well as by compare match. If GRA
functions as an input capture register in the 16-bit timer channel selected in TPCR, TPC output
will be triggered by the input capture signal. Figure 11.8 shows the timing.
TIOC pin
Input capture
signal
NDR
DR
N
N
M
Figure 11.8 TPC Output Triggering by Input Capture (Example)

407
11.4
Usage Notes
11.4.1
Operation of TPC Output Pins
TP
0
to TP
15
are multiplexed with 16-bit timer, DMAC, address bus, and other pin functions. When
16-bit timer, DMAC, or address output is enabled, the corresponding pins cannot be used for TPC
output. The data transfer from NDR bits to DR bits takes place, however, regardless of the usage
of the pin.
Pin functions should be changed only under conditions in which the output trigger event will not
occur.
11.4.2
Note on Non-Overlapping Output
During non-overlapping operation, the transfer of NDR bit values to DR bits takes place as
follows.
1. NDR bits are always transferred to DR bits at compare match A.
2. At compare match B, NDR bits are transferred only if their value is 0. Bits are not transferred
if their value is 1.
Figure 11.9 illustrates the non-overlapping TPC output operation.
DDR
NDER
Q
Q
TPC output pin
DR
NDR
C
Q
D
Q
D
Compare match A
Compare match B
Figure 11.9 Non-Overlapping TPC Output

408
Therefore, 0 data can be transferred ahead of 1 data by making compare match B occur before
compare match A. NDR contents should not be altered during the interval from compare match B
to compare match A (the non-overlap margin).
This can be accomplished by having the IMFA interrupt service routine write the next data in
NDR, or by having the IMFA interrupt activate the DMAC. The next data must be written before
the next compare match B occurs.
Figure 11.10 shows the timing relationships.
Compare
match A
Compare
match B
NDR write
NDR
NDR write
DR
0/1 output
0/1 output
0 output
0 output
Do not write
to NDR in this
interval
Do not write
to NDR in this
interval
Write to NDR
in this interval
Write to NDR
in this interval
Figure 11.10 Non-Overlapping Operation and NDR Write Timing

409
Section 12 Watchdog Timer
12.1
Overview
The H8/3006 and H8/3007 have an on-chip watchdog timer (WDT). The WDT has two selectable
functions: it can operate as a watchdog timer to supervise system operation, or it can operate as an
interval timer. As a watchdog timer, it generates a reset signal for the H8/3006 and H8/3007 chip
if a system crash allows the timer counter (TCNT) to overflow before being rewritten. In interval
timer operation, an interval timer interrupt is requested at each TCNT overflow.
12.1.1
Features
WDT features are listed below.
∑
Selection of eight counter clock sources
/2,
/32,
/64,
/128,
/256,
/512,
/2048, or
/4096
∑
Interval timer option
∑
Timer counter overflow generates a reset signal or interrupt.
The reset signal is generated in watchdog timer operation. An interval timer interrupt is
generated in interval timer operation.
∑
Watchdog timer reset signal resets the entire H8/3006 and H8/3007 internally, and can also be
output externally.
The reset signal generated by timer counter overflow during watchdog timer operation resets
the entire H8/3006 and H8/3007 internally. An external reset signal can be output from the
RESO pin to reset other system devices simultaneously.
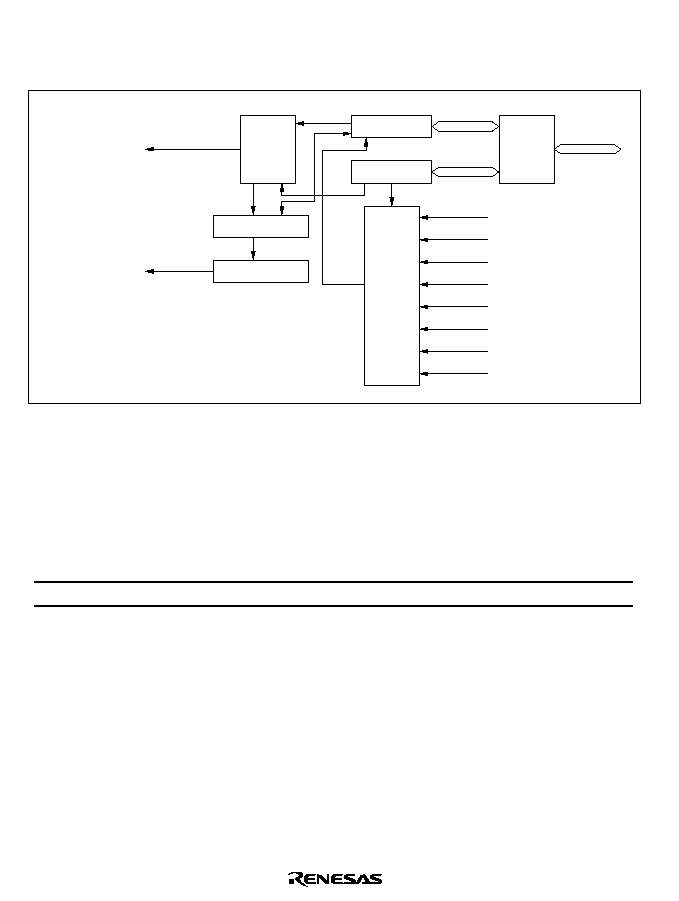
410
12.1.2
Block Diagram
Figure 12.1 shows a block diagram of the WDT.
/2
/32
/64
/128
/256
/512
/2048
/4096
TCNT
TCSR
RSTCSR
Reset control
Interrupt signal
Reset
(internal, external)
(interval timer)
Interrupt
control
Overflow
Clock
Clock
selector
Read/
write
control
Internal
data bus
Internal clock sources
Legend
TCNT:
TCSR:
RSTCSR:
Timer counter
Timer control/status register
Reset control/status register
Figure 12.1 WDT Block Diagram
12.1.3
Pin Configuration
Table 12.1 describes the WDT output pin.
Table 12.1
WDT Pin
Name
Abbreviation
I/O
Function
Reset output
RESO
Output*
External output of the watchdog timer reset signal
Note: * Open-drain output.
411
12.1.4
Register Configuration
Table 12.2 summarizes the WDT registers.
Table 12.2
WDT Registers
Address*
1
Write*
2
Read
Name
Abbreviation
R/W
Initial Value
H'FFF8C H'FFF8C Timer control/status register
TCSR
R/(W)*
3
H'18
H'FFF8D Timer counter
TCNT
R/W
H'00
H'FFF8E H'FFF8F Reset control/status register
RSTCSR
R/(W) *
3
H'3F
Notes: 1. Lower 20 bits of the address in advanced mode.
2. Write word data starting at this address.
3. Only 0 can be written in bit 7, to clear the flag.

412
12.2
Register Descriptions
12.2.1
Timer Counter (TCNT)
TCNT is an 8-bit readable and writable up-counter.
Bit
Initial value
Read/Write
Note: TCNT is write-protected by a password. For details see section 12.2.4, Notes on Register
Access.
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
0
0
R/W
2
0
R/W
1
0
R/W
When the TME bit is set to 1 in TCSR, TCNT starts counting pulses generated from an internal
clock source selected by bits CKS2 to CKS0 in TCSR. When the count overflows (changes from
H'FF to H'00), the OVF bit is set to 1 in TCSR. TCNT is initialized to H'00 by a reset and when
the TME bit is cleared to 0.

413
12.2.2
Timer Control/Status Register (TCSR)
TCSR is an 8-bit readable and writable register. Its functions include selecting the timer mode and
clock source.
Bit
Initial value
Read/Write
Notes: TCSR is write-protected by a password. For details see section 12.2.4, Notes on Register
Access.
* Only 0 can be written, to clear the flag.
7
OVF
0
R/(W)
6
WT/IT
0
R/W
5
TME
0
R/W
4
--
1
--
3
--
1
--
0
CKS0
0
R/W
2
CKS2
0
R/W
1
CKS1
0
R/W
Overflow flag
Status flag indicating overflow
Clock select
These bits select the
TCNT clock source
Timer mode select
Selects the mode
Timer enable
Selects whether TCNT runs or halts
Reserved bits
*
Bits 7 to 5 are initialized to 0 by a reset and in standby mode. Bits 2 to 0 are initialized to 0 by a
reset. In software standby mode bits 2 to 0 are not initialized, but retain their previous values.
414
Bit 7--Overflow Flag (OVF): This status flag indicates that the timer counter has overflowed
from H'FF to H'00.
Bit 7
OVF
Description
0
[Clearing condition]
Cleared by reading OVF when OVF = 1, then writing 0 in OVF
(Initial value)
1
[Setting condition]
Set when TCNT changes from H'FF to H'00
Bit 6--Timer Mode Select (WT/
IT): Selects whether to use the WDT as a watchdog timer or
interval timer. If used as an interval timer, the WDT generates an interval timer interrupt request
when TCNT overflows. If used as a watchdog timer, the WDT generates a reset signal when
TCNT overflows.
Bit 6
WT/
IT
Description
0
Interval timer: requests interval timer interrupts
(Initial value)
1
Watchdog timer: generates a reset signal
Bit 5--Timer Enable (TME): Selects whether TCNT runs or is halted. When WT/
IT = 1, clear
the software standby bit (SSBY) to 0 in SYSCR before setting TME. When setting SSBY to 1,
TME should be cleared to 0.
Bit 5
TME
Description
0
TCNT is initialized to H'00 and halted
(Initial value)
1
TCNT is counting
Bits 4 and 3--Reserved: These bits cannot be modified and are always read as 1.
415
Bits 2 to 0--Clock Select 2 to 0 (CKS2/1/0): These bits select one of eight internal clock sources,
obtained by prescaling the system clock (
), for input to TCNT.
Bit 2
CKS2
Bit 1
CKS1
Bit 0
CKS0
Description
0
0
0
/2
(Initial value)
1
/32
1
0
/64
1
/128
1
0
0
/256
1
/512
1
0
/2048
1
/4096
12.2.3
Reset Control/Status Register (RSTCSR)
RSTCSR is an 8-bit readable and writable register that indicates when a reset signal has been
generated by watchdog timer overflow, and controls external output of the reset signal.
Bit
Initial value
Read/Write
Notes: RSTCSR is write-protected by a password. For details see section 12.2.4, Notes on
Register Access.
* Only 0 can be written in bit 7, to clear the flag.
7
WRST
0
R/(W)
6
RSTOE
0
R/W
5
--
1
--
4
--
1
--
3
--
1
--
0
--
1
--
2
--
1
--
1
--
1
--
*
Watchdog timer reset
Indicates that a reset signal has been generated
Reserved bits
Reset output enable
Enables or disables external output of the reset signal
Bits 7 and 6 are initialized by input of a reset signal at the
RES pin. They are not initialized by
reset signals generated by watchdog timer overflow.

416
Bit 7--Watchdog Timer Reset (WRST): During watchdog timer operation, this bit indicates that
TCNT has overflowed and generated a reset signal. This reset signal resets the entire H8/3006 and
H8/3007 chip internally. If bit RSTOE is set to 1, this reset signal is also output (low) at the
RESO
pin to initialize external system devices.
Bit 7
WRST
Description
0
[Clearing condition]
Reset signal at
RES
pin.
Read WRST when WRST =1, then write 0 in WRST.
(Initial value)
1
[Setting condition]
Set when TCNT overflow generates a reset signal during watchdog timer operation
Bit 6--Reset Output Enable (RSTOE): Enables or disables external output at the
RESO pin of
the reset signal generated if TCNT overflows during watchdog timer operation.
Bit 6
RSTOE
Description
0
Reset signal is not output externally
(Initial value)
1
Reset signal is output externally
Bits 5 to 0--Reserved: These bits cannot be modified and are always read as 1.
417
12.2.4
Notes on Register Access
The watchdog timer's TCNT, TCSR, and RSTCSR registers differ from other registers in being
more difficult to write. The procedures for writing and reading these registers are given below.
Writing to TCNT and TCSR: These registers must be written by a word transfer instruction.
They cannot be written by byte instructions. Figure 12.2 shows the format of data written to TCNT
and TCSR. TCNT and TCSR both have the same write address. The write data must be contained
in the lower byte of the written word. The upper byte must contain H'5A (password for TCNT) or
H'A5 (password for TCSR). This transfers the write data from the lower byte to TCNT or TCSR.
15
8 7
0
H'5A
Write data
Address
H'FFF8C *
15
8 7
0
H'A5
Write data
Address
H'FFF8C *
TCNT write
TCSR write
Note: Lower 20 bits of the address in advanced mode.
*
Figure 12.2 Format of Data Written to TCNT and TCSR
418
Writing to RSTCSR: RSTCSR must be written by a word transfer instruction. It cannot be
written by byte transfer instructions. Figure 12.3 shows the format of data written to RSTCSR. To
write 0 in the WRST bit, the write data must have H'A5 in the upper byte and H'00 in the lower
byte. The data (H'00) in the lower byte is written to RSTCSR, clearing the WRST bit to 0. To
write to the RSTOE bit, the upper byte must contain H'5A and the lower byte must contain the
write data. Writing this word transfers a write data value into the RSTOE bit.
15
8 7
0
H'A5
H'00
Address
H'FFF8E*
15
8 7
0
H'5A
Write data
Address
H'FFF8E*
Writing 0 in WRST bit
Writing to RSTOE bit
Note: Lower 20 bits of the address in advanced mode.
*
Figure 12.3 Format of Data Written to RSTCSR
Reading TCNT, TCSR, and RSTCSR: These registers are read like other registers. Reading
TCNT, TCSR, and RSTCSR: These registers are read like other registers. Byte transfer
instructions can be used. The read addresses are H'FFF8C for TCSR, H'FFF8D for TCNT, and
H'FFF8F for RSTCSR, as listed in table 12-3.
Table 12.3
Read Addresses of TCNT, TCSR, and RSTCSR
Address*
Register
H'FFF8C
TCSR
H'FFF8D
TCNT
H'FFF8F
RSTCSR
Note: * Lower 20 bits of the address in advanced mode.
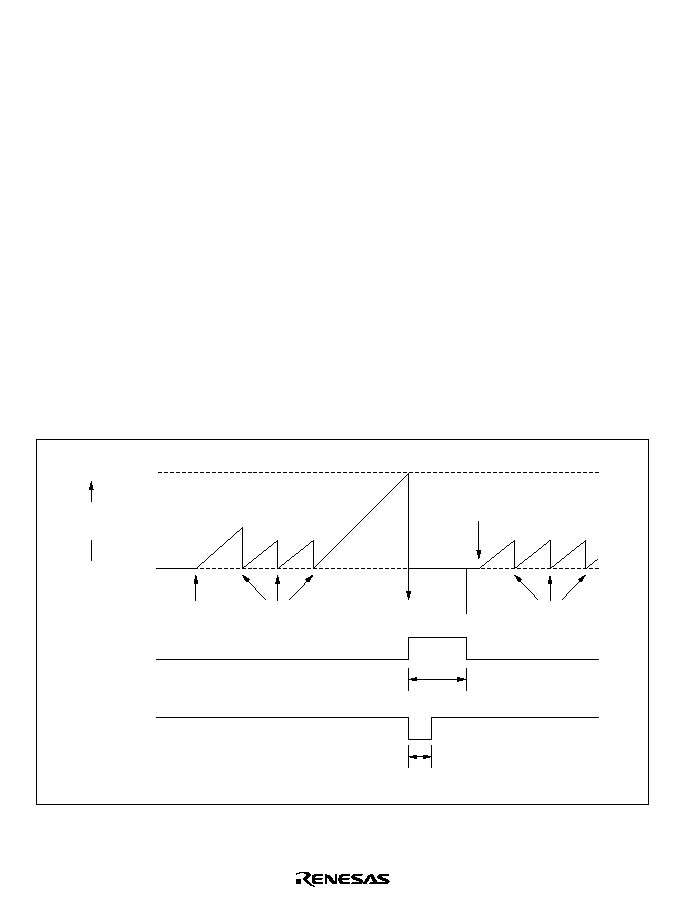
419
12.3
Operation
Operations when the WDT is used as a watchdog timer and as an interval timer are described
below.
12.3.1
Watchdog Timer Operation
Figure 12.4 illustrates watchdog timer operation. To use the WDT as a watchdog timer, set the
WT/
IT and TME bits to 1 in TCSR. Software must prevent TCNT overflow by rewriting the
TCNT value (normally by writing H'00) before overflow occurs. If TCNT fails to be rewritten and
overflows due to a system crash etc., the H8/3006 and H8/3007 are internally reset for a duration
of 518 states.
The watchdog reset signal can be externally output from the
RESO pin to reset external system
devices. The reset signal is output externally for 132 states. External output can be enabled or
disabled by the RSTOE bit in RSTCSR.
A watchdog reset has the same vector as a reset generated by input at the
RES pin. Software can
distinguish a
RES reset from a watchdog reset by checking the WRST bit in RSTCSR.
If a
RES reset and a watchdog reset occur simultaneously, the RES reset takes priority.
H'FF
H'00
RESO
WDT overflow
Start
H'00 written
in TCNT
Reset
TME set to 1
H'00 written
in TCNT
Internal
reset signal
518 states
132 states
TCNT count
value
OVF = 1
Figure 12.4 Operation in Watchdog Timer Mode
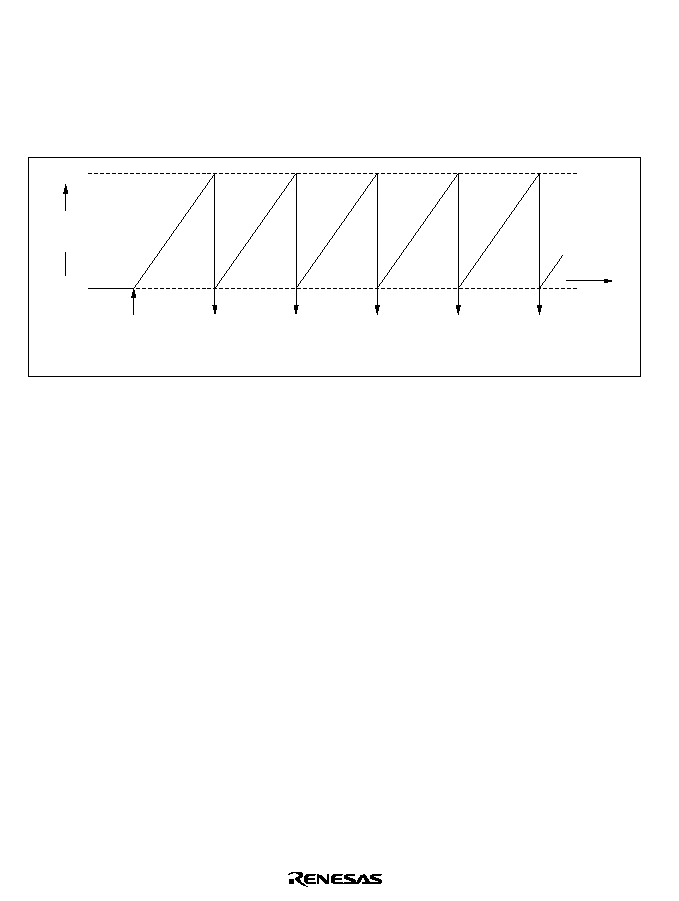
420
12.3.2
Interval Timer Operation
Figure 12.5 illustrates interval timer operation. To use the WDT as an interval timer, clear bit
WT/
IT to 0 and set bit TME to 1 in TCSR. An interval timer interrupt request is generated at each
TCNT overflow. This function can be used to generate interval timer interrupts at regular
intervals.
TCNT
count value
Time t
Interval
timer
interrupt
Interval
timer
interrupt
Interval
timer
interrupt
Interval
timer
interrupt
WT/ = 0
TME = 1
IT
H'FF
H'00
Figure 12.5 Interval Timer Operation

421
12.3.3
Timing of Setting of Overflow Flag (OVF)
Figure 12.6 shows the timing of setting of the OVF flag. The OVF flag is set to 1 when TCNT
overflows. At the same time, a reset signal is generated in watchdog timer operation, or an interval
timer interrupt is generated in interval timer operation.
TCNT
Overflow signal
OVF
H'FF
H'00
Figure 12.6 Timing of Setting of OVF
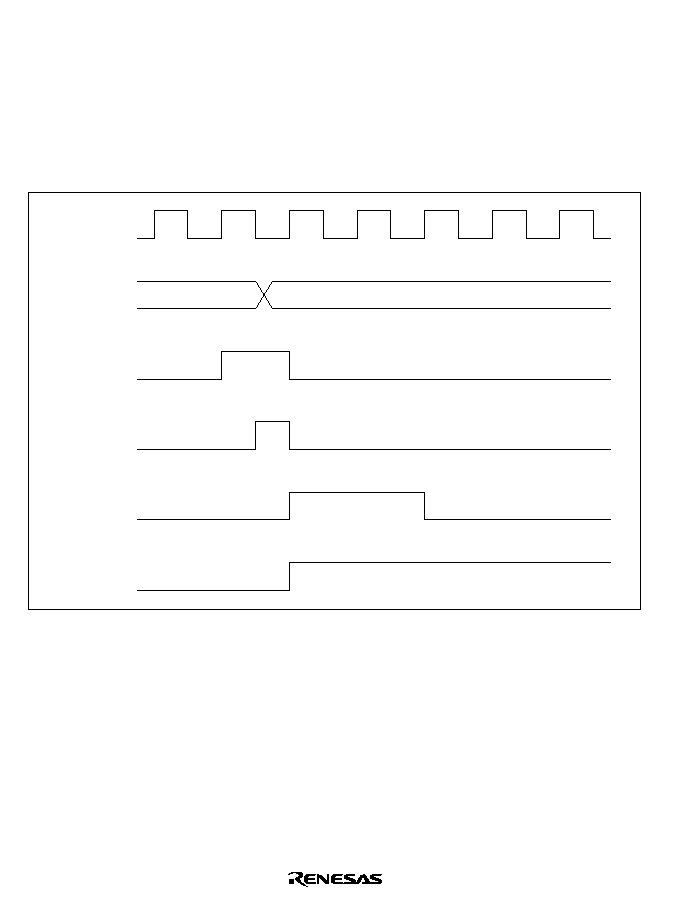
422
12.3.4
Timing of Setting of Watchdog Timer Reset Bit (WRST)
The WRST bit in RSTCSR is valid when bits WT/
IT and TME are both set to 1 in TCSR.
Figure 12.7 shows the timing of setting of WRST and the internal reset timing. The WRST bit is
set to 1 when TCNT overflows and OVF is set to 1. At the same time an internal reset signal is
generated for the entire H8/3006 and H8/3007 chip. This internal reset signal clears OVF to 0, but
the WRST bit remains set to 1. The reset routine must therefore clear the WRST bit.
TCNT
Overflow signal
OVF
WRST
H'FF
H'00
WDT internal
reset
Figure 12.7 Timing of Setting of WRST Bit and Internal Reset
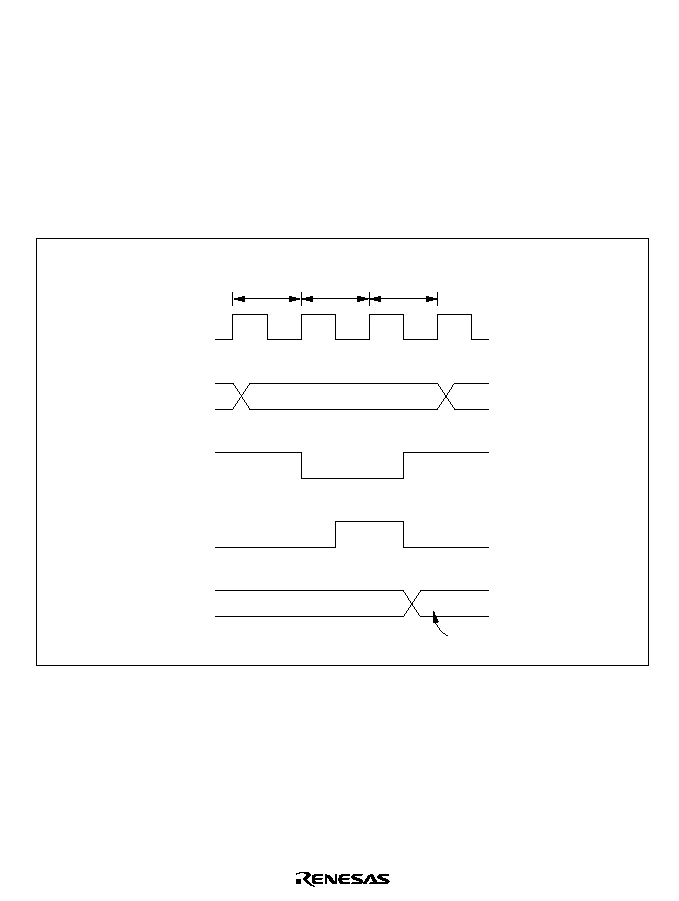
423
12.4
Interrupts
During interval timer operation, an overflow generates an interval timer interrupt (WOVI). The
interval timer interrupt is requested whenever the OVF bit is set to 1 in TCSR.
12.5
Usage Notes
Contention between TCNT Write and Increment: If a timer counter clock pulse is generated
during the T
3
state of a write cycle to TCNT, the write takes priority and the timer count is not
incremented. See figure 12.8.
TCNT
TCNT
N
M
Counter write data
T
3
T
2
T
1
CPU: TCNT write cycle
Internal write
signal
TCNT input
clock
Figure 12.8 Contention between TCNT Write and Count up
Changing CKS2 to CKS0 Bit: Halt TCNT by clearing the TME bit to 0 in TCSR before
changing the values of bits CKS2 to CKS0.

425
Section 13 Serial Communication Interface
13.1
Overview
The H8/3006 and H8/3007 have a serial communication interface (SCI) with three independent
channels. The SCI can communicate in both asynchronous and synchronous mode. It also has a
multiprocessor communication function for serial communication among two or more processors.
When the SCI is not used, it can be halted to conserve power. Each SCI channel can be halted
independently. For details, see section 19.6, Module Standby Function.
The SCI also has a smart card interface function conforming to the ISO/IEC 7816-3 (Identification
Card) standard. This function supports serial communication with a smart card. Switching
between the normal serial communication interface and the smart card interface is carried out by
means of a register setting.
13.1.1
Features
SCI features are listed below.
∑
Selection of synchronous or asynchronous mode for serial communication
Asynchronous mode
Serial data communication is synchronized one channel at a time. The SCI can communicate
with a universal asynchronous receiver/transmitter (UART), asynchronous communication
interface adapter (ACIA), or other chip that employs standard asynchronous communication.
It can also communicate with two or more other processors using the multiprocessor
communication function. There are twelve selectable serial data transfer formats.
Data length:
7 or 8 bits
Stop bit length:
1 or 2 bits
Parity:
even/odd/none
Multiprocessor bit:
1 or 0
Receive error detection:
parity, overrun, and framing errors
Break detection:
by reading the RxD level directly when a framing error occurs
Synchronous mode
Serial data communication is synchronized with a clock signal. The SCI can communicate
with other chips having a synchronous communication function.
There is a single serial data communication format.
Data length:
8 bits
Receive error detection:
overrun errors

426
∑
Full-duplex communication
The transmitting and receiving sections are independent, so the SCI can transmit and receive
simultaneously. The transmitting and receiving sections are both double-buffered, so serial
data can be transmitted and received continuously.
∑
The following settings can be made for the serial data to be transferred:
LSB-first or MSB-first transfer
Inversion of data logic level
∑
Built-in baud rate generator with selectable bit rates
∑
Selectable transmit/receive clock sources: internal clock from baud rate generator, or external
clock from the SCK pin
∑
Four types of interrupts
Transmit-data-empty, transmit-end, receive-data-full, and receive-error interrupts are requested
independently. The transmit-data-empty and receive-data-full interrupts from SCI0 can
activate the DMA controller (DMAC) to transfer data.
Features of the smart card interface are listed below.
∑
Asynchronous communication
Data length: 8 bits
Parity bits generated and checked
Error signal output in receive mode (parity error)
Error signal detect and automatic data retransmit in transmit mode
Supports both direct convention and inverse convention
∑
Built-in baud rate generator with selectable bit rates
∑
Three types of interrupts
Transmit-data-empty, receive-data-full, and transmit/receive-error interrupts are requested
independently. The transmit-data-empty and receive-data-full interrupts can activate the DMA
controller (DMAC) to transfer data.
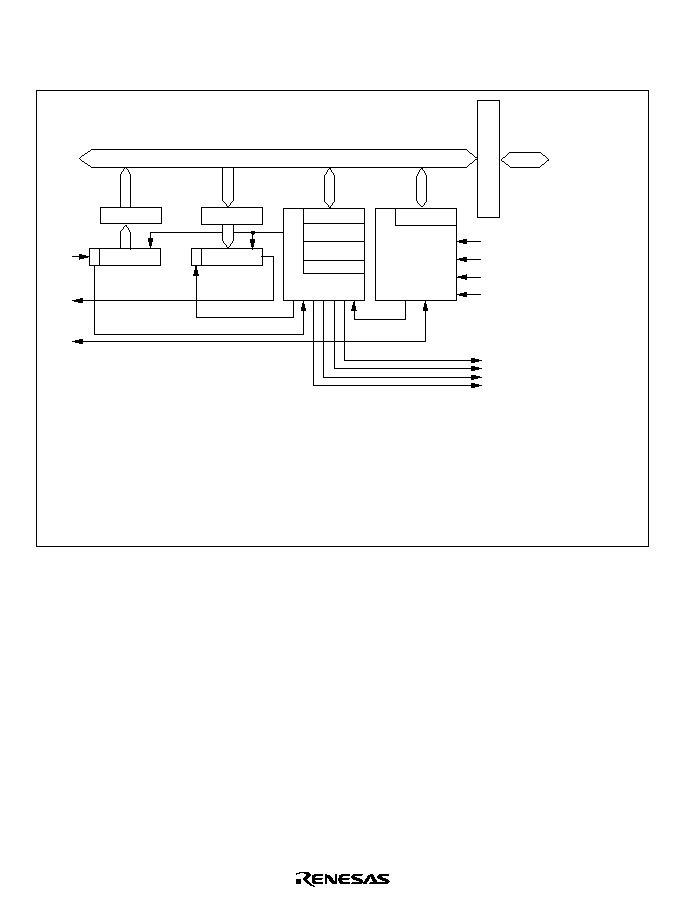
427
13.1.2
Block Diagram
Figure 13.1 shows a block diagram of the SCI.
RDR
RSR
TDR
TSR
SSR
SCR
SMR
SCMR
BRR
/ 4
/16
/64
RxD
TxD
SCK
T E I
T X I
R X I
E R I
Legend
RSR
: Receive shift register
RDR
: Receive data register
TSR
: Transmit shift register
TDR
: Transmit data register
SMR
: Serial mode register
SCR
: Serial control register
SSR
: Serial status register
BRR
: Bit rate register
SCMR : Smart card mode register
Module data bus
Bus interface
Internal data bus
Parity generate
Parity check
Transmit/receive
control
Baud rate
generator
Clock
External clock
Figure 13.1 SCI Block Diagram

428
13.1.3
Pin Configuration
The SCI has serial pins for each channel as listed in table 13.1.
Table 13.1
SCI Pins
Channel Name
Abbreviation
I/O
Function
0
Serial clock pin
SCK
0
Input/output
SCI
0
clock input/output
Receive data pin
RxD
0
Input
SCI
0
receive data input
Transmit data pin
TxD
0
Output
SCI
0
transmit data output
1
Serial clock pin
SCK
1
Input/output
SCI
1
clock input/output
Receive data pin
RxD
1
Input
SCI
1
receive data input
Transmit data pin
TxD
1
Output
SCI
1
transmit data output
2
Serial clock pin
SCK
2
Input/output
SCI
2
clock input/output
Receive data pin
RxD
2
Input
SCI
2
receive data input
Transmit data pin
TxD
2
Output
SCI
2
transmit data output
429
13.1.4
Register Configuration
The SCI has internal registers as listed in table 13.2. These registers select asynchronous or
synchronous mode, specify the data format and bit rate, control the transmitter and receiver
sections, and specify switching between the serial communication interface and smart card
interface.
Table 13.2
SCI Registers
Channel
Address*
1
Name
Abbreviation
R/W
Initial Value
0
H'FFFB0
Serial mode register
SMR
R/W
H'00
H'FFFB1
Bit rate register
BRR
R/W
H'FF
H'FFFB2
Serial control register
SCR
R/W
H'00
H'FFFB3
Transmit data register
TDR
R/W
H'FF
H'FFFB4
Serial status register
SSR
R/(W)*
2
H'84
H'FFFB5
Receive data register
RDR
R
H'00
H'FFFB6
Smart card mode register
SCMR
R/W
H'F2
1
H'FFFB8
Serial mode register
SMR
R/W
H'00
H'FFFB9
Bit rate register
BRR
R/W
H'FF
H'FFFBA
Serial control register
SCR
R/W
H'00
H'FFFBB
Transmit data register
TDR
R/W
H'FF
H'FFFBC
Serial status register
SSR
R/(W)*
2
H'84
H'FFFBD
Receive data register
RDR
R
H'00
H'FFFBE
Smart card mode register
SCMR
R/W
H'F2
2
H'FFFC0
Serial mode register
SMR
R/W
H'00
H'FFFC1
Bit rate register
BRR
R/W
H'FF
H'FFFC2
Serial control register
SCR
R/W
H'00
H'FFFC3
Transmit data register
TDR
R/W
H'FF
H'FFFC4
Serial status register
SSR
R/(W)*
2
H'84
H'FFFC5
Receive data register
RDR
R
H'00
H'FFFC6
Smart card mode register
SCMR
R/W
H'F2
Notes: 1. Indicates the lower 20 bits of the address in advanced mode.
2. Only 0 can be written, to clear flags.
430
13.2
Register Descriptions
13.2.1
Receive Shift Register (RSR)
RSR is the register that receives serial data.
Bit
7
6
5
4
3
2
1
0
Read/Write
The SCI loads serial data input at the RxD pin into RSR in the order received, LSB (bit 0) first,
thereby converting the data to parallel data. When one byte of data has been received, it is
automatically transferred to RDR. The CPU cannot read or write RSR directly.
13.2.2
Receive Data Register (RDR)
RDR is the register that stores received serial data.
Bit
7
6
5
4
3
2
1
0
Initial value
Read/Write
R
0
0
0
0
0
0
0
0
R
R
R
R
R
R
R
When the SCI has received one byte of serial data, it transfers the received data from RSR into
RDR for storage, completing the receive operation. RSR is then ready to receive the next data.
This double-buffering allows data to be received continuously.
RDR is a read-only register. Its contents cannot be modified by the CPU. RDR is initialized to
H'00 by a reset and in standby mode.

431
13.2.3
Transmit Shift Register (TSR)
TSR is the register that transmits serial data.
Bit
7
6
5
4
3
2
1
0
Read/Write
The SCI loads transmit data from TDR to TSR, then transmits the data serially from the TxD pin,
LSB (bit 0) first. After transmitting one data byte, the SCI automatically loads the next transmit
data from TDR into TSR and starts transmitting it. If the TDRE flag is set to 1 in SSR, however,
the SCI does not load the TDR contents into TSR. The CPU cannot read or write RSR directly.
13.2.4
Transmit Data Register (TDR)
TDR is an 8-bit register that stores data for serial transmission.
Bit
7
6
5
4
3
2
1
0
Initial value
Read/Write
R/W
1
1
1
1
1
1
1
1
R/W
R/W
R/W
R/W
R/W
R/W
R/W
When the SCI detects that TSR is empty, it moves transmit data written in TDR from TDR into
TSR and starts serial transmission. Continuous serial transmission is possible by writing the next
transmit data in TDR during serial transmission from TSR.
The CPU can always read and write TDR. TDR is initialized to H'FF by a reset and in standby
mode.
432
13.2.5
Serial Mode Register (SMR)
SMR is an 8-bit register that specifies the SCI's serial communication format and selects the
clock source for the baud rate generator.
C/
A
CHR
PE
O/
E
STOP
MP
CKS1
CKS0
R/W
0
0
0
0
0
0
0
0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Initial value
Read/Write
Bit
7
6
5
4
3
2
1
0
Clock select 1/0
These bits select the
baud rate generator's
clock source
Communication mode
Selects asynchronous or synchronous mode
Character length
Selects character length in asynchronous mode
Parity enable
Selects whether a parity bit is added
Parity mode
Selects even or odd parity
Stop bit length
Selects the stop bit length
Multiprocessor mode
Selects the multiprocessor
function
The CPU can always read and write SMR. SMR is initialized to H'00 by a reset and in standby
mode.
Bit 7--Communication Mode (C/
A)/GSM Mode (GM): The function of this bit differs for the
normal serial communication interface and for the smart card interface. Its function is switched
with the SMIF bit in SCMR.

433
For serial communication interface (SMIF bit in SCMR cleared to 0): Selects whether the SCI
operates in asynchronous or synchronous mode.
Bit 7
C/
A
Description
0
Asynchronous mode
(Initial value)
1
Synchronous mode
For smart card interface (SMIF bit in SCMR set to 1): Selects GSM mode for the smart card
interface.
Bit 7
GM
Description
0
The TEND flag is set 12.5 etu after the start bit
(Initial value)
1
The TEND flag is set 11.0 etu after the start bit
Note:
etu: Elementary time unit (time required to transmit one bit)
Bit 6--Character Length (CHR): Selects 7-bit or 8-bits data length in asynchronous mode. In
synchronous mode, the data length is 8 bits regardless of the CHR setting,
Bit 6
CHR
Description
0
8-bit data
(Initial value)
1
7-bit data*
Note:
*
When 7-bit data is selected, the MSB (bit 7) of TDR is not transmitted.
Bit 5--Parity Enable (PE): In asynchronous mode, this bit enables or disables the addition of a
parity bit to transmit data, and the checking of the parity bit in receive data. In synchronous mode,
the parity bit is neither added nor checked, regardless of the PE bit setting.
Bit 5
PE
Description
0
Parity bit not added or checked
(Initial value)
1
Parity bit added and checked*
Note:
*
When PE bit is set to 1, an even or odd parity bit is added to transmit data according to
the even or odd parity mode selection by the O/
E
bit, and the parity bit in receive data is
checked to see that it matches the even or odd mode selected by the O/
E
bit.
434
Bit 4--Parity Mode (O/
E): Selects even or odd parity. The O/E bit setting is only valid when the
PE bit is set to 1, enabling parity bit addition and checking, in asynchronous mode. The O/
E bit
setting is ignored in synchronous mode, or when parity addition and checking is disabled in
asynchronous mode.
Bit 4
O/
E
Description
0
Even parity*
1
(Initial value)
1
Odd parity*
2
Notes: 1. When even parity is selected, the parity bit added to transmit data makes an even
number of 1s in the transmitted character and parity bit combined. Receive data must
have an even number of 1s in the received character and parity bit combined.
2. When odd parity is selected, the parity bit added to transmit data makes an odd number
of 1s in the transmitted character and parity bit combined. Receive data must have an
odd number of 1s in the received character and parity bit combined.
Bit 3--Stop Bit Length (STOP): Selects one or two stop bits in asynchronous mode. This setting
is used only in asynchronous mode. In synchronous mod no stop bit is added, so the STOP bit
setting is ignored.
Bit 3
STOP
Description
0
1 stop bit*
1
(Initial value)
1
2 stop bits*
2
Notes: 1. One stop bit (with value 1) is added to the end of each transmitted character.
2. Two stop bits (with value 1) are added to the end of each transmitted character.
In receiving, only the first stop bit is checked, regardless of the STOP bit setting. If the second
stop bit is 1, it is treated as a stop bit. If the second stop bit is 0, it is treated as the start bit of the
next incoming character.
Bit 2--Multiprocessor Mode (MP): Selects a multiprocessor format. When a multiprocessor
format is selected, parity settings made by the PE and O/
E bits are ignored. The MP bit setting is
valid only in asynchronous mode. It is ignored in synchronous mode.
For further information on the multiprocessor communication function, see section 13.3.3,
Multiprocessor Communication.
Bit 2
MP
Description
0
Multiprocessor function disabled
(Initial value)
1
Multiprocessor format selected
435
Bits 1 and 0--Clock Select 1 and 0 (CKS1/0): These bits select the clock source for the on-chip
baud rate generator. Four clock sources are available:
,
/4,
/16, and
/64.
For the relationship between the clock source, bit rate register setting, and baud rate, see section
13.2.8, Bit Rate Register (BRR).
Bit 1
CKS1
Bit 0
CKS0
Description
0
0
(Initial value)
0
1
/4
1
0
/16
1
1
/64
436
13.2.6
Serial Control Register (SCR)
SCR register enables or disables the SCI transmitter and receiver, enables or disables serial clock
output in asynchronous mode, enables or disables interrupts, and selects the transmit/receive clock
source.
Bit 7
6
5
4
3
2
1
0
TIE
RIE
TE
RE
MPIE
TEIE
CKE1
CKE0
Initial value
Read/Write
R/W
0
0
0
0
0
0
0
0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Transmit-end interrupt enable
Enables or disables transmit-end
interrupts (TEI)
Multiprocessor interrupt enable
Enables or disables multiprocessor
interrupts
Receive enable
Enables or disables the receiver
Transmit enable
Enables or disables the transmitter
Receive interrupt enable
Enables or disables receive-data-full interrupts (RXI) and
receive-error interrupts (ERI)
Transmit interrupt enable
Enables or disables transmit-data-empty interrupts (TXI)
Clock enable 1/0
hese bits select the
SCI clock source
The CPU can always read and write SCR. SCR is initialized to H'00 by a reset and in standby
mode.
437
Bit 7--Transmit Interrupt Enable (TIE): Enables or disables the transmit-data-empty interrupt
(TXI) requested when the TDRE flag in SSR is set to 1 due to transfer of serial transmit data from
TDR to TSR.
Bit 7
TIE
Description
0
Transmit-data-empty interrupt request (TXI) is disabled*
(Initial value)
1
Transmit-data-empty interrupt request (TXI) is enabled
Note:
*
TXI interrupt requests can be cleared by reading the value 1 from the TDRE flag, then
clearing it to 0; or by clearing the TIE bit to 0.
Bit 6--Receive Interrupt Enable (RIE): Enables or disables the receive-data-full interrupt (RXI)
requested when the RDRF flag in SSR is set to 1 due to transfer of serial receive data from RSR to
RDR; also enables or disables the receive-error interrupt (ERI).
Bit 6
RIE
Description
0
Receive-data-full (RXI) and receive-error (ERI) interrupt requests are disabled*
(Initial value)
1
Receive-data-full (RXI) and receive-error (ERI) interrupt requests are enabled
Note:
*
RXI and ERI interrupt requests can be cleared by reading the value 1 from the RDRF,
FER, PER, or ORER flag, then clearing the flag to 0; or by clearing the RIE bit to 0.
Bit 5--Transmit Enable (TE): Enables or disables the start of SCI serial transmitting operations.
Bit 5
TE
Description
0
Transmitting disabled*
1
(Initial value)
1
Transmitting enabled*
2
Notes: 1. The TDRE flag is fixed at 1 in SSR.
2. In the enabled state, serial transmission starts when the TDRE flag in SSR is cleared to
0 after writing of transmit data into TDR. Select the transmit format in SMR before
setting the TE bit to 1.

438
Bit 4--Receive Enable (RE): Enables or disables the start of SCI serial receiving operations.
Bit 4
RE
Description
0
Receiving disabled*
1
(Initial value)
1
Receiving enabled*
2
Notes: 1. Clearing the RE bit to 0 does not affect the RDRF, FER, PER, and ORER flags. These
flags retain their previous values.
2. In the enabled state, serial receiving starts when a start bit is detected in asynchronous
mode, or serial clock input is detected in synchronous mode. Select the receive format
in SMR before setting the RE bit to 1.
Bit 3--Multiprocessor Interrupt Enable (MPIE): Enables or disables multiprocessor interrupts.
The MPIE bit setting is valid only in asynchronous mode, and only if the MP bit is set to 1 in
SMR. The MPIE bit setting is ignored in synchronous mode or when the MP bit is cleared to 0.
Bit 3
MPIE
Description
0
Multiprocessor interrupts are disabled (normal receive operation) (Initial value)
[Clearing conditions]
∑
The MPIE bit is cleared to 0
∑
MPB = 1 in received data
1
Multiprocessor interrupts are enabled*
Receive-data-full interrupts (RXI), receive-error interrupts (ERI), and setting of
the RDRF, FER, and ORER status flags in SSR are disabled until data with the
multiprocessor bit set to 1 is received.
Note:
*
The SCI does not transfer receive data from RSR to RDR, does not detect receive
errors, and does not set the RDRF, FER, and ORER flags in SSR. When it receives
data in which MPB = 1, the SCI sets the MPB bit to 1 in SSR, automatically clears the
MPIE bit to 0, enables RXI and ERI interrupts (if the TIE and RIE bits in SCR are set to
1), and allows the FER and ORER flags to be set.
Bit 2--Transmit-End interrupt Enable (TEIE): Enables or disables the transmit-end interrupt
(TEI) requested if TDR does not contain valid transmit data when the MSB is transmitted.
Bit 2
TEIE
Description
0
Transmit-end interrupt requests (TEI) are disabled*
(Initial value)
1
Transmit-end interrupt requests (TEI) are enabled*
Note:
*
TEI interrupt requests can be cleared by reading the value 1 from the TDRE flag in
SSR, then clearing the TDRE flag to 0, thereby also clearing the TEND flag to 0; or by
clearing the TEIE bit to 0.

439
Bits 1 and 0--Clock Enable 1 and 0 (CKE1/0): The function of these bits differs for the normal
serial communication interface and for the smart card interface. Their function is switched with
the SMIF bit in SCMR.
For serial communication interface (SMIF bit in SCMR cleared to 0): These bits select the
SCI clock source and enable or disable clock output from the SCK pin. Depending on the settings
of CKE1 and CKE0, the SCK pin can be used for generic input/output, serial clock output, or
serial clock input.
The CKE0 setting is valid only in asynchronous mode, and only when the SCI is internally
clocked (CKE1 = 0). The CKE0 setting is ignored in synchronous mode, or when an external
clock source is selected (CKE1 = 1). Select the SCI operating mode in SMR before setting the
CKE1 and CKE0 bits . For further details on selection of the SCI clock source, see table 13.9 in
section 13.3, Operation.
Bit 1
CKE1
Bit 0
CKE0 Description
0
0
Asynchronous mode
Internal clock, SCK pin available for generic input/output*
1
Synchronous mode
Internal clock, SCK pin used for serial clock output*
1
0
1
Asynchronous mode
Internal clock, SCK pin used for clock output*
2
Synchronous mode
Internal clock, SCK pin used for serial clock output
1
0
Asynchronous mode
External clock, SCK pin used for clock input*
3
Synchronous mode
External clock, SCK pin used for serial clock input
1
1
Asynchronous mode
External clock, SCK pin used for clock input*
3
Synchronous mode
External clock, SCK pin used for serial clock input
Notes: 1. Initial value
2. The output clock frequency is the same as the bit rate.
3. The input clock frequency is 16 times the bit rate.
440
For smart card interface (SMIF bit in SCMR set to 1): These bits, together with the GM bit in
SMR, determine whether the SCK pin is used for generic input/output or as the serial clock output
pin.
SMR
GM
Bit 1
CKE1
Bit 0
CKE0 Description
0
0
0
SCK pin available for generic input/output
(Initial value)
0
0
1
SCK pin used for clock output
1
0
0
SCK pin output fixed low
1
0
1
SCK pin used for clock output
1
1
0
SCK pin output fixed high
1
1
1
SCK pin used for clock output
13.2.7
Serial Status Register (SSR)
SSR is an 8-bit register containing multiprocessor bit values, and status flags that indicate the
operating status of the SCI.
441
Initial value
Read/Write
R
R/W
0
1
0
0
0
1
0
0
Bit
7
6
5
4
3
2
1
0
Multiprocessor bit transfer
Value of multiprocessor bit
to be transmitted
R/(W)*
1
R/(W)*
1
R/(W)*
1
R/(W)*
1
R/(W)*
1
R
TDRE
RDRF
ORER
FER/ERS
PER
TEND
MPB
MPBT
Multiprocessor bit
Stores the received
multiprocessor bit value
Transmit end*
2
Status flag indicating end of transmission
Parity error
Status flag indicating detection of a receive parity
error
Framing error (FER)/Error signal status (ERS)*
2
Status flag indicating detection of a receive framing error,
or flag indicating detection of an error signal
Overrun error
Status flag indicating detection of a receive overrun error
Receive data register full
Status flag indicating that data has been received and stored in RDR
Transmit data register empty
Status flag indicating that transmit data has been transferred from
TDR into TSR and new data can be written in TDR
Notes: *1. Only 0 can be written, to clear the flag.
*2. Function differs between the normal serial communication interface and the smart card interface.
The CPU can always read and write SSR, but cannot write 1 in the TDRE, RDRF, ORER, PER,
and FER flags. These flags can be cleared to 0 only if they have first been read while set to 1.
The TEND and MPB flags are read-only bits that cannot be written.
SSR is initialized to H'84 by a reset and in standby mode.
442
Bit 7--Transmit Data Register Empty (TDRE): Indicates that the SCI has loaded transmit data
from TDR into TSR and the next serial data can be written in TDR.
Bit 7
TDRE
Description
0
TDR contains valid transmit data
[Clearing conditions]
∑
Read TDRE when TDRE = 1, then write 0 in TDRE
∑
The DMAC writes data in TDR
1
TDR does not contain valid transmit data
(Initial value)
[Setting conditions]
∑
The chip is reset or enters standby mode
∑
The TE bit in SCR is cleared to 0
∑
TDR contents are loaded into TSR, so new data can be written in TDR
Bit 6--Receive Data Register Full (RDRF): Indicates that RDR contains new receive data.
Bit 6
RDRF
Description
0
RDR does not contain new receive data
(Initial value)
[Clearing conditions]
∑
The chip is reset or enters standby mode
∑
Read RDRF when RDRF = 1, then write 0 in RDRF
∑
The DMAC reads data from RDR
1
RDR contains new receive data
[Setting condition]
Serial data is received normally and transferred from RSR to RDR
Note:
The RDR contents and the RDRF flag are not affected by detection of receive errors or by
clearing of the RE bit to 0 in SCR. They retain their previous values. If the RDRF flag is
still set to 1 when reception of the next data ends, an overrun error will occur and the
receive data will be lost.
443
Bit 5--Overrun Error (ORER): Indicates that data reception ended abnormally due to an
overrun error.
Bit 5
ORER
Description
0
Receiving is in progress or has ended normally*
1
(Initial value)
[Clearing conditions]
∑
The chip is reset or enters standby mode
∑
Read ORER when ORER = 1, then write 0 in ORER
1
A receive overrun error occurred*
2
[Setting condition]
Reception of the next serial data ends when RDRF = 1
Notes: 1. Clearing the RE bit to 0 in SCR does not affect the ORER flag, which retains its
previous value.
2. RDR continues to hold the receive data prior to the overrun error, so subsequent
receive data is lost. Serial receiving cannot continue while the ORER flag is set to 1. In
synchronous mode, serial transmitting is also disabled.
Bit 4--Framing Error (FER)/Error Signal Status (ERS): The function of this bit differs for the
normal serial communication interface and for the smart card interface. Its function is switched
with the SMIF bit in SCMR.
For serial communication interface (SMIF bit in SCMR cleared to 0): Indicates that data
reception ended abnormally due to a framing error in asynchronous mode.
Bit 4
FER
Description
0
Receiving is in progress or has ended normally*
1
(Initial value)
[Clearing conditions]
∑
The chip is reset or enters standby mode
∑
Read FER when FER = 1, then write 0 in FER
1
A receive framing error occurred
[Setting condition]
The stop bit at the end of the receive data is checked and found to be 0*
2
Notes: 1. Clearing the RE bit to 0 in SCR does not affect the FER flag, which retains its previous
value.
2. When the stop bit length is 2 bits, only the first bit is checked. The second stop bit is
not checked. When a framing error occurs the SCI transfers the receive data into RDR
but does not set the RDRF flag. Serial receiving cannot continue while the FER flag is
set to 1. In synchronous mode, serial transmitting is also disabled.
444
For smart card interface (SMIF bit in SCMR set to 1): Indicates the status of the error signal
sent back from the receiving side during transmission. Framing errors are not detected in smart
card interface mode.
Bit 4
ERS
Description
0
Normal reception, no error signal*
(Initial value)
[Clearing conditions]
∑
The chip is reset or enters standby mode
∑
Read ERS when ERS = 1, then write 0 in ERS
1
An error signal has been sent from the receiving side indicating detection of a
parity error
[Setting condition]
The error signal is low when sampled
Note:
*
Clearing the TE bit to 0 in SCR does not affect the ERS flag, which retains its previous
value.
Bit 3--Parity Error (PER): Indicates that data reception ended abnormally due to a parity error
in asynchronous mode.
Bit 3
PER
Description
0
Receiving is in progress or has ended normally*
1
(Initial value)
[Clearing conditions]
∑
The chip is reset or enters standby mode
∑
Read PER when PER = 1, then write 0 in PER
1
A receive parity error occurred*
2
[Setting condition]
The number of 1s in receive data, including the parity bit, does not match the
even or odd parity setting of O/
E
in SMR
Notes: 1. Clearing the RE bit to 0 in SCR does not affect the PER flag, which retains its previous
value.
2. When a parity error occurs the SCI transfers the receive data into RDR but does not set
the RDRF flag. Serial receiving cannot continue while the PER flag is set to 1. In
synchronous mode, serial transmitting is also disabled.
Bit 2--Transmit End (TEND): The function of this bit differs for the normal serial
communication interface and for the smart card interface. Its function is switched with the SMIF
bit in SCMR.
445
For serial communication interface (SMIF bit in SCMR cleared to 0): Indicates that when the
last bit of a serial character was transmitted TDR did not contain valid transmit data, so
transmission has ended. The TEND flag is a read-only bit and cannot be written.
Bit 2
TEND
Description
0
Transmission is in progress
[Clearing conditions]
∑
Read TDRE when TDRE = 1, then write 0 in TDRE
∑
The DMAC writes data in TDR
1
End of transmission
(Initial value)
[Setting conditions]
∑
The chip is reset or enters standby mode
∑
The TE bit in SCR is cleared to 0
∑
TDRE is 1 when the last bit of a 1-byte serial transmit character is
transmitted
For smart card interface (SMIF bit in SCMR set to 1): Indicates that when the last bit of a
serial character was transmitted TDR did not contain valid transmit data, so transmission has
ended. The TEND flag is a read-only bit and cannot be written.
Bit 2
TEND
Description
0
Transmission is in progress
[Clearing conditions]
∑
Read TDRE when TDRE = 1, then write 0 in TDRE
∑
The DMAC writes data in TDR
1
End of transmission
(Initial value)
[Setting conditions]
∑
The chip is reset or enters standby mode
∑
The TE bit is cleared to 0 in SCR and the FER/ERS bit is also cleared to 0
∑
TDRE is 1 and FER/ERS is 0 (normal transmission) 2.5 etu (when GM = 0)
or 1.0 etu (when GM = 1) after a 1-byte serial character is transmitted
Note:
etu: Elementary time unit (time required to transmit one bit)

446
Bit 1--Multiprocessor bit (MPB): Stores the value of the multiprocessor bit in the receive data
when a multiprocessor format is used in asynchronous mode. MPB is a read-only bit, and cannot
be written.
Bit 1
MPB
Description
0
Multiprocessor bit value in receive data is 0*
(Initial value)
1
Multiprocessor bit value in receive data is 1
Note:
*
If the RE bit in SCR is cleared to 0 when a multiprocessor format is selected, MPB
retains its previous value.
Bit 0--Multiprocessor Bit Transfer (MPBT): Stores the value of the multiprocessor bit added to
transmit data when a multiprocessor format in selected for transmitting in asynchronous mode.
The MPBT bit setting is ignored in synchronous mode, when a multiprocessor format is not
selected, or when the SCI cannot transmit.
Bit 0
MPBT
Description
0
Multiprocessor bit value in transmit data is 0
(Initial value)
1
Multiprocessor bit value in transmit data is 1
13.2.8
Bit Rate Register (BRR)
BRR is an 8-bit register that, together with the CKS1 and CKS0 bits in SMR that select the baud
rate generator clock source, determines the serial communication bit rate.
Bit
Initial value
Read/Write
7
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
6
1
1
1
1
1
1
1
1
5
4
3
2
1
0
The CPU can always read and write BRR. BRR is initialized to H'FF by a reset and in standby
mode. Each SCI channel has independent baud rate generator control, so different values can be
set in the three channels.
Table 13.3 shows examples of BRR settings in asynchronous mode. Table 13.4 shows examples
of BRR settings in synchronous mode.
447
Table 13.3
Examples of Bit Rates and BRR Settings in Asynchronous Mode
Bit Rate
(MHz)
(bit/s)
2
2.097152
2.4576
3
n
N
Error (%) n
N
Error (%) n
N
Error (%) n
N
Error (%)
110
1
141 0.03
1
148 -0.04
1
174 -0.26
1
212 0.03
150
1
103 0.16
1
108 0.21
1
127 0.00
1
155 0.16
300
0
207 0.16
0
217 0.21
0
255 0.00
1
77
0.16
600
0
103 0.16
0
108 0.21
0
127 0.00
0
155 0.16
1200
0
51
0.16
0
54
-0.70
0
63
0.00
0
77
0.16
2400
0
25
0.16
0
26
1.14
0
31
0.00
0
38
0.16
4800
0
12
0.16
0
13
-2.48
0
15
0.00
0
19
-2.34
9600
0
6
-6.99
0
6
-2.48
0
7
0.00
0
9
-2.34
19200
0
2
8.51
0
2
13.78
0
3
0.00
0
4
-2.34
31250
0
1
0.00
0
1
4.86
0
1
22.88
0
2
0.00
38400
0
1
-18.62
0
1
-14.67
0
1
0.00
--
--
--
Bit Rate
(MHz)
(bit/s)
3.6864
4
4.9152
5
n
N
Error (%) n
N
Error (%) n
N
Error (%) n
N
Error (%)
110
2
64
0.07
2
70
0.03
2
86
0.31
2
88
-0.25
150
1
191 0.00
1
207 0.16
1
255 0.00
2
64
0.16
300
1
95
0.00
1
103 0.16
1
127 0.00
1
129 0.16
600
0
191 0.00
0
207 0.16
0
255 0.00
1
64
0.16
1200
0
95
0.00
0
103 0.16
0
127 0.00
0
129 0.16
2400
0
47
0.00
0
51
0.16
0
63
0.00
0
64
0.16
4800
0
23
0.00
0
25
0.16
0
31
0.00
0
32
-1.36
9600
0
11
0.00
0
12
0.16
0
15
0.00
0
15
1.73
19200
0
5
0.00
0
6
-6.99
0
7
0.00
0
7
1.73
31250
--
--
--
0
3
0.00
0
4
-1.70
0
4
0.00
38400
0
2
0.00
0
2
8.51
0
3
0.00
0
3
1.73

448
Bit Rate
(MHz)
(bit/s)
6
6.144
7.3728
8
n
N
Error (%) n
N
Error (%) n
N
Error (%) n
N
Error (%)
110
2
106 -0.44
2
108 0.08
2
130 -0.07
2
141 0.03
150
2
77
0.16
2
79
0.00
2
95
0.00
2
103 0.16
300
1
155 0.16
1
159 0.00
1
191 0.00
1
207 0.16
600
1
77
0.16
1
79
0.00
1
95
0.00
1
103 0.16
1200
0
155 0.16
0
159 0.00
0
191 0.00
0
207 0.16
2400
0
77
0.16
0
79
0.00
0
95
0.00
0
103 0.16
4800
0
38
0.16
0
39
0.00
0
47
0.00
0
51
0.16
9600
0
19
-2.34
0
19
0.00
0
23
0.00
0
25
0.16
19200
0
9
-2.34
0
9
0.00
0
11
0.00
0
12
0.16
31250
0
5
0.00
0
5
2.40
0
6
5.33
0
7
0.00
38400
0
4
-2.34
0
4
0.00
0
5
0.00
0
6
-6.99
Bit Rate
(MHz)
(bit/s)
9.8304
10
12
12.288
n
N
Error (%) n
N
Error (%) n
N
Error (%) n
N
Error (%)
110
2
174 -0.26
2
177 -0.25
2
212 0.03
2
217 0.08
150
2
127 0.00
2
129 0.16
2
155 0.16
2
159 0.00
300
1
255 0.00
2
64
0.16
2
77
0.16
2
79
0.00
600
1
127 0.00
1
129 0.16
1
155 0.16
1
159 0.00
1200
0
255 0.00
1
64
0.16
1
77
0.16
1
79
0.00
2400
0
127 0.00
0
129 0.16
0
155 0.16
0
159 0.00
4800
0
63
0.00
0
64
0.16
0
77
0.16
0
79
0.00
9600
0
31
0.00
0
32
-1.36
0
38
0.16
0
39
0.00
19200
0
15
0.00
0
15
1.73
0
19
-2.34
0
19
0.00
31250
0
9
-1.70
0
9
0.00
0
11
0.00
0
11
2.40
38400
0
7
0.00
0
7
1.73
0
9
-2.34
0
9
0.00
449
Bit
(MHz)
Rate
13
14
14.7456
16
18
20
(bit/s)
n N
Error
(%)
n N
Error
(%)
n N
Error
(%)
n N
Error
(%)
n N
Error
(%)
n N
Error
(%)
110
2 230 -0.08
2 248 -0.17
3 64
0.70
3 70
0.03
3 79
-0.12
3 88
-0.25
150
2 168 0.16
2 181 0.16
2 191 0.00
2 207 0.16
2 233 0.16
3 64
0.16
300
2 84
-0.43
2 90
0.16
2 95
0.00
2 103 0.16
2 116 0.16
2 129 0.16
600
1 168 0.16
1 181 0.16
1 191 0.00
1 207 0.16
1 233 0.16
2 64
0.16
1200
1 84
-0.43
1 90
0.16
1 95
0.00
1 103 0.16
1 116 0.16
1 129 0.16
2400
0 168 0.16
0 181 0.16
0 191 0.00
0 207 0.16
0 233 0.16
1 64
0.16
4800
0 84
-0.43
0 90
0.16
0 95
0.00
0 103 0.16
0 116 0.16
0 129 0.16
9600
0 41
0.76
0 45
-0.93
0 47
0.00
0 51
0.16
0 58
-0.69
0 64
0.16
19200
0 20
0.76
0 22
-0.93
0 23
0.00
0 25
0.16
0 28
1.02
0 32
-1.36
31250
0 12
0.00
0 13
0.00
0 14
-1.70
0 15
0.00
0 17
0.00
0 19
0.00
38400
0 10
-3.82
0 10
3.57
0 11
0.00
0 12
0.16
0 14
-2.34
0 15
1.73

450
Table 13.4
Examples of Bit Rates and BRR Settings in Synchronous Mode
Bit
(MHz)
Rate
2
4
8
10
13
16
18
20
(bit/s)
n
N
n
N
n
N
n
N
n
N
n
N
n
N
n
N
110
3
70
--
--
--
--
--
--
--
--
--
--
--
--
--
--
250
2
124
2
249
3
124
--
--
3
202
3
249
--
--
--
--
500
1
249
2
124
2
249
--
--
3
101
3
124
3
140
3
155
1k
1
124
1
249
2
124
--
--
2
202
2
249
3
69
3
77
2.5k
0
199
1
99
1
199
1
249
2
80
2
99
2
112
2
124
5k
0
99
0
199
1
99
1
124
1
162
1
199
1
224
1
249
10k
0
49
0
99
0
199
0
249
1
80
1
99
1
112
1
124
25k
0
19
0
39
0
79
0
99
0
129
0
159
0
179
0
199
50k
0
9
0
19
0
39
0
49
0
64
0
79
0
89
0
99
100k
0
4
0
9
0
19
0
24
--
--
0
39
0
44
0
49
250k
0
1
0
3
0
7
0
9
0
12
0
15
0
17
0
19
500k
0
0*
0
1
0
3
0
4
--
--
0
7
0
8
0
9
1M
0
0*
0
1
--
--
--
--
0
3
0
4
0
4
2M
0
0*
--
--
--
--
0
1
--
--
--
--
2.5M
--
--
0
0*
--
--
--
--
--
--
--
--
4M
0
0*
--
--
--
--
Note:
Settings with an error of 1% or less are recommended.
Legend
Blank : No setting available
-- :
Setting possible, but error occurs
*
:
Continuous transmission/reception not possible

451
The BRR setting is calculated as follows:
Asynchronous mode:
N =
64
◊
2
2n-1
◊
B
◊
10
6
≠ 1
Synchronous mode:
N =
8
◊
2
2n-1
◊
B
◊
10
6
≠ 1
B: Bit rate (bit/s)
N: BRR setting for baud rate generator (0
N
255)
: System clock frequency (MHz)
n: Baud rate generator clock source (n = 0, 1, 2, 3)
(For the clock sources and values of n, see the following table.)
SMR Settings
n
Clock Source
CKS1
CKS0
0
0
0
1
/4
0
1
2
/16
1
0
3
/64
1
1
The bit rate error in asynchronous mode is calculated as follows:
Error (%) =
(N + 1)
◊
B
◊
64
◊
2
2n-1
≠ 1
◊
100
◊
10
6
452
Table 13.5 shows the maximum bit rates in asynchronous mode for various system clock
frequencies. Table 13.6 and 13.7 shows the maximum bit rates with external clock input.
Table 13.5
Maximum Bit Rates for Various Frequencies (Asynchronous Mode)
Settings
(MHz)
Maximum Bit Rate (bit/s)
n
N
2
62500
0
0
2.097152
65536
0
0
2.4576
76800
0
0
3
93750
0
0
3.6864
115200
0
0
4
125000
0
0
4.9152
153600
0
0
5
156250
0
0
6
187500
0
0
6.144
192000
0
0
7.3728
230400
0
0
8
250000
0
0
9.8304
307200
0
0
10
312500
0
0
12
375000
0
0
12.288
384000
0
0
14
437500
0
0
14.7456
460800
0
0
16
500000
0
0
17.2032
537600
0
0
18
562500
0
0
20
625000
0
0
453
Table 13.6
Maximum Bit Rates with External Clock Input (Asynchronous Mode)
(MHz)
External Input Clock (MHz)
Maximum Bit Rate (bit/s)
2
0.5000
31250
2.097152
0.5243
32768
2.4576
0.6144
38400
3
0.7500
46875
3.6864
0.9216
57600
4
1.0000
62500
4.9152
1.2288
76800
5
1.2500
78125
6
1.5000
93750
6.144
1.5360
96000
7.3728
1.8432
115200
8
2.0000
125000
9.8304
2.4576
153600
10
2.5000
156250
12
3.0000
187500
12.288
3.0720
192000
14
3.5000
218750
14.7456
3.6864
230400
16
4.0000
250000
17.2032
4.3008
268800
18
4.5000
281250
20
5.0000
312500
454
Table 13.7
Maximum Bit Rates with External Clock Input (Synchronous Mode)
(MHz)
External Input Clock (MHz)
Maximum Bit Rate (bit/s)
2
0.3333
333333.3
4
0.6667
666666.7
6
1.0000
1000000.0
8
1.3333
1333333.3
10
1.6667
1666666.7
12
2.0000
2000000.0
14
2.3333
2333333.3
16
2.6667
2666666.7
18
3.0000
3000000.0
20
3.3333
3333333.3
455
13.3
Operation
13.3.1
Overview
The SCI can carry out serial communication in two modes: asynchronous mode in which
synchronization is achieved character by character, and synchronous mode in which
synchronization is achieved with clock pulses. A smart card interface is also supported as a serial
communication function for an IC card interface.
Selection of asynchronous or synchronous mode and the transmission format for the normal serial
communication interface is made in SMR, as shown in table 13.8. The SCI clock source is
selected by the C/
A bit in SMR and the CKE1 and CKE0 bits in SCR, as shown in table 13.9.
For details of the procedures for switching between LSB-first and MSB-first mode and inverting
the data logic level, see section 14.2.1, Smart Card Mode Register (SCMR).
For selection of the smart card interface format, see section 14.3.3, Data Format.
Asynchronous Mode
∑
Data length is selectable: 7 or 8 bits
∑
Parity and multiprocessor bits are selectable, and so is the stop bit length (1 or 2 bits). These
selections determine the communication format and character length.
∑
In receiving, it is possible to detect framing errors, parity errors, overrun errors, and the break
state.
∑
An internal or external clock can be selected as the SCI clock source.
When an internal clock is selected, the SCI operates using the on-chip baud rate generator,
and can output a serial clock signal with a frequency matching the bit rate.
When an external clock is selected, the external clock input must have a frequency 16 times
the bit rate. (The on-chip baud rate generator is not used.)
Synchronous Mode
∑
The communication format has a fixed 8-bit data length.
∑
In receiving, it is possible to detect overrun errors.
∑
An internal or external clock can be selected as the SCI clock source.
When an internal clock is selected, the SCI operates using the on-chip baud rate generator,
and can output a serial clock signal to external devices.
When an external clock is selected, the SCI operates on the input serial clock. The on-chip
baud rate generator is not used.
456
Smart Card Interface
∑
One frame consists of 8-bit data and a parity bit.
∑
In transmitting, a guard time of at least two elementary time units (2 etu) is provided between
the end of the parity bit and the start of he next frame. (An elementary time unit is the time
required to transmit one bit.)
∑
In receiving, if a parity error is detected, a low error signal level is output for 1 etu, beginning
10.5 etu after the start bit..
∑
In transmitting, if an error signal is received, the same data is automatically transmitted again
after at least 2 etu.
∑
Only asynchronous communication is supported. There is no synchronous communication
function.
For details of smart card interface operation, see section 14, Smart Card Interface.
Table 13.8
SMR Settings and Serial Communication Formats
SMR Settings
SCI Communication Format
Bit 7
C/
A
Bit 6
CHR
Bit 2
MP
Bit 5
PE
Bit 3
STOP
Mode
Data
Length
Multi-
pro-
cessor
Bit
Parity
Bit
Stop Bit
Length
0
0
0
0
0
Asyn-
8-bit data
Absent
Absent
1 bit
1
chronous
2 bits
1
0
mode
Present
1 bit
1
2 bits
1
0
0
7-bit data
Absent
1 bit
1
2 bits
1
0
Present
1 bit
1
2 bits
0
1
--
0
Asyn-
chronous
8-bit data
Present
Absent
1 bit
--
1
mode (multi-
2 bits
1
--
0
processor
7-bit data
1 bit
--
1
format)
2 bits
1
--
--
--
--
Syn-
chronous
mode
8-bit data
Absent
None
457
Table 13.9
SMR and SCR Settings and SCI Clock Source Selection
SMR
SCR Setting
SCI Transmit/Receive clock
Bit 7
C/
A
Bit 1
CKE1
Bit 0
CKE0 Mode
Clock Source SCK Pin Function
0
0
0
Asynchronous
Internal
SCI does not use the SCK pin
1
mode
Outputs clock with frequency matching the
bit rate
1
0
External
Inputs clock with frequency 16 times the bit
1
rate
1
0
0
Synchronous
Internal
Outputs the serial clock
1
mode
1
0
External
Inputs the serial clock
1
13.3.2
Operation in Asynchronous Mode
In asynchronous mode, each transmitted or received character begins with a start bit and ends with
one or two stop bits. Serial communication is synchronized one character at a time.
The transmitting and receiving sections of the SCI are independent, so full-duplex communication
is possible. The transmitter and the receiver are both double-buffered, so data can be written and
read while transmitting and receiving are in progress, enabling continuous transmitting and
receiving.
Figure 13.2 shows the general format of asynchronous serial communication. In asynchronous
serial communication the communication line is normally held in the mark (high) state. The SCI
monitors the line and starts serial communication when the line goes to the space (low) state,
indicating a start bit. One serial character consists of a start bit (low), data (LSB first), parity bit
(high or low), and one or two stop bits (high), in that order.
When receiving in asynchronous mode, the SCI synchronizes at the falling edge of the start bit.
The SCI samples each data bit on the eighth pulse of a clock with a frequency 16 times the bit rate.
Receive data is latched at the center of each bit.

458
1
D0
D1
D2
D3
D4
D5
D6
D7
0/1
1
Idle (mark) state
1
(MSB)
(LSB)
0
1
Serial
data
Start
bit
1 bit
Transmit or receive data
7 or 8 bits
One unit of data (character or frame)
1 bit,
or
none
Parity
bit
1 or 2 bits
Stop bit(s)
Figure 13.2 Data Format in Asynchronous Communication
(Example: 8-Bit Data with Parity and 2 Stop Bits)
Communication Formats: Table 13.10 shows the 12 communication formats that can be selected
in asynchronous mode. The format is selected by settings in SMR.

459
Table 13.10 Serial Communication Formats (Asynchronous Mode)
7-bit data
STOP STOP
MPB
STOP
MPB
STOP
P
STOP
STOP
P
STOP STOP
SMR Settings
CHR
PE
MP
STOP
0
0
0
0
0
0
0
1
0
1
0
0
0
1
0
1
1
0
0
0
1
0
0
1
1
1
0
0
1
1
0
1
0
--
1
0
0
--
1
1
1
--
1
0
1
--
1
1
Serial Communication Format and Frame Length
1
2
3
4
5
6
7
8
9
10
11
12
STOP
8-bit data
S
8-bit data
S
STOP
P
8-bit data
S
8-bit data
S
STOP
7-bit data
S
7-bit data
S
7-bit data
S
S
8-bit data
S
STOP STOP
MPB
8-bit data
S
7-bit data
S
7-bit data
S
P
STOP
STOP
STOP
STOP
STOP
MPB
Legend
S:
Start bit
STOP: Stop bit
P:
Parity bit
MPB:
Multiprocessor bit
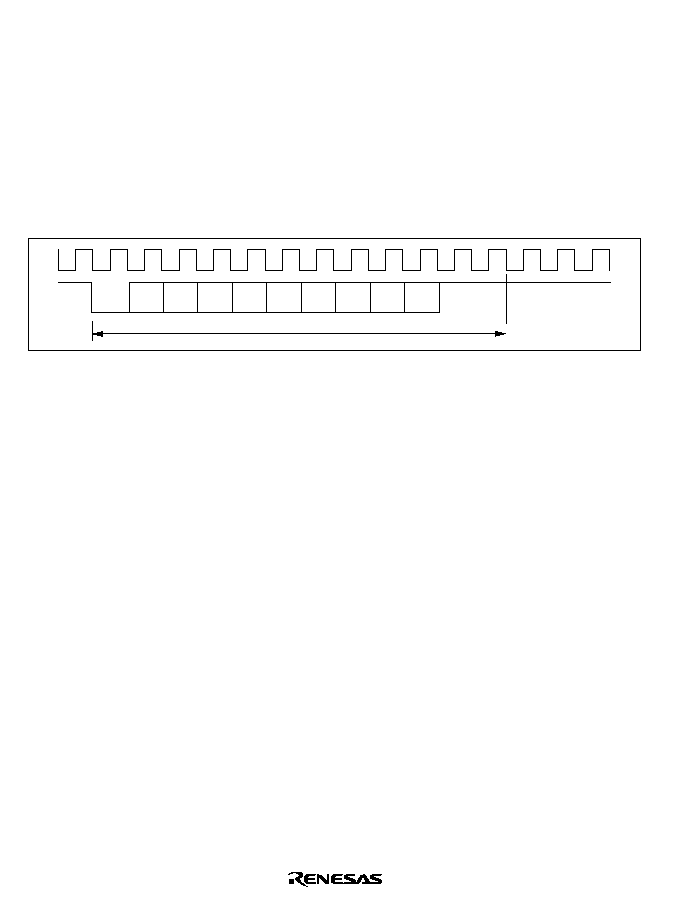
460
Clock: An internal clock generated by the on-chip baud rate generator or an external clock input
from the SCK pin can be selected as the SCI transmit/receive clock. The clock source is selected
by the C/
A bit in SMR and bits CKE1 and CKE0 in SCR. For details of SCI clock source
selection, see table 13.9.
When an external clock is input at the SCK pin, it must have a frequency 16 times the desired bit
rate.
When the SCI is operated on an internal clock, it can output a clock signal at the SCK pin. The
frequency of this output clock is equal to the bit rate. The phase is aligned as shown in figure 13.3
so that the rising edge of the clock occurs at the center of each transmit data bit.
D0
D1
D2
D3
D4
D5
D6
D7
0/1
1
1
0
1
frame
Figure 13.3 Phase Relationship between Output Clock and Serial Data
(Asynchronous Mode)
Transmitting and Receiving Data:
∑
SCI Initialization (Asynchronous Mode): Before transmitting or receiving data, clear the TE
and RE bits to 0 in SCR, then initialize the SCI as follows.
When changing the communication mode or format, always clear the TE and RE bits to 0
before following the procedure given below. Clearing TE to 0 sets the TDRE flag to 1 and
initializes TSR. Clearing RE to 0, however, does not initialize the RDRF, PER, FER, and
ORER flags, or RDR, which retain their previous contents.
When an external clock is used the clock should not be stopped during initialization or
subsequent operation, since operation will be unreliable in this case.
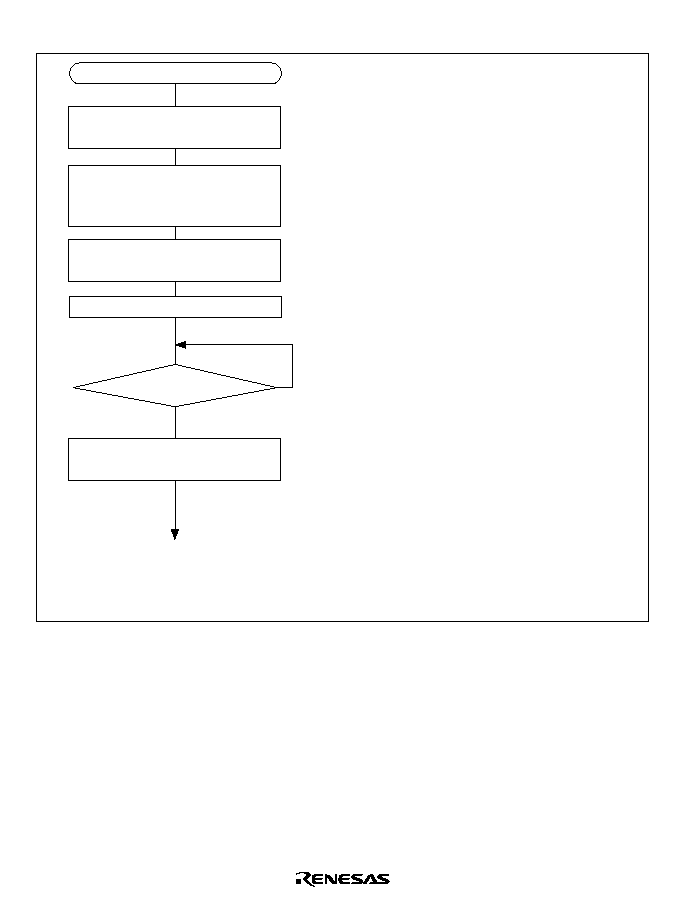
461
Figure 13.4 shows a sample flowchart for initializing the SCI.
Start of initialization
Set value in BRR
Select communication format
in SMR
1-bit interval elapsed?
Wait
(4)
(3)
(2)
(1)
Yes
No
<End of initialization>
Set TE or RE bit to 1 in SCR
Set RIE, TIE, TEIE, and MPIE bits
Set CKE1 and CKE0 bits in SCR
(leaving TE and RE bits
cleared to 0)
Clear TE and RE bits
to 0 in SCR
(1)
(2)
(3)
(4)
Set the clock source in SCR. Clear the
RIE, TIE, TEIE, MPIE, TE, and RE bits to
0. If clock output is selected in
asynchronous mode, clock output starts
immediately after the setting is made in
SCR.
Select the communication format in SMR.
Write the value corresponding to the bit
rate in BRR.
This step is not necessary when an
external clock is used.
Wait for at least the interval required to
transmit or receive one bit, then set the
TE or RE bit to 1 in SCR. Set the RIE,
TIE, TEIE, and MPIE bits. Setting the TE
or RE bit enables the SCI to use the TxD
or RxD pin.
Note: In simultaneous transmitting and receiving, the TE and RE bits should be cleared to 0 or
set to 1 simultaneously.
Figure 13.4 Sample Flowchart for SCI Initialization

462
∑
Transmitting Serial Data (Asynchronous Mode): Figure 13.5 shows a sample flowchart for
transmitting serial data and indicates the procedure to follow.
Yes
Yes
<End>
Clear TE bit to 0 in SCR
Clear DR bit to 0 and set
DDR bit to 1
TEND = 1
No
Output break signal?
No
Read TEND flag in SSR
All data transmitted?
No
TDRE = 1
Yes
No
Read TDRE flag in SSR
(3)
Initialize
(4)
Write transmit data in TDR
and clear TDRE flag to 0 in SSR
(1)
(2)
(3)
(4)
Start transmitting
(1)
(2)
Yes
SCI initialization:
the transmit data output function of the TxD pin is
selected automatically.
After the TE bit is set to 1, one frame of 1s is output,
then transmission is possible.
SCI status check and transmit data write:
read SSR and check that the TDRE flag is set to 1,
then write transmit data in TDR and clear the TDRE
flag to 0.
To continue transmitting serial data:
after checking that the TDRE flag is 1, indicating that
data can be written, write data in TDR, then clear the
TDRE flag to 0. When the DMAC is activated by a
transmit-data-empty interrupt request (TXI) to write
data in TDR, the TDRE flag is checked and cleared
automatically.
To output a break signal at the end of serial
transmission:
set the DDR bit to 1 and clear the DR bit to 0 (DDR
and DR are I/O port registers), then clear the TE bit
to 0 in SCR.
Figure 13.5 Sample Flowchart for Transmitting Serial Data

463
In transmitting serial data, the SCI operates as follows:
∑
The SCI monitors the TDRE flag in SSR. When the TDRE flag is cleared to 0, the SCI
recognizes that TDR contains new data, and loads this data from TDR into TSR.
∑
After loading the data from TDR to TSR, the SCI sets the TDRE flag to 1 and starts
transmitting. If the TIE bit is set to 1 in SCR, the SCI requests a transmit-data-empty interrupt
(TXI) at this time.
Serial transmit data is transmitted in the following order from the TxD pin:
Start bit: One 0 bit is output.
Transmit data: 7 or 8 bits are output, LSB first.
Parity bit or multiprocessor bit: One parity bit (even or odd parity),or one multiprocessor
bit is output. Formats in which neither a parity bit nor a multiprocessor bit is output can
also be selected.
Stop bit(s): One or two 1 bits (stop bits) are output.
Mark state: Output of 1 bits continues until the start bit of the next transmit data.
∑
The SCI checks the TDRE flag when it outputs the stop bit. If the TDRE flag is 0, the SCI
loads new data from TDR into TSR, outputs the stop bit, then begins serial transmission of the
next frame. If the TDRE flag is 1, the SCI sets the TEND flag to 1 in SSR, outputs the stop
bit, then continues output of 1 bits in the mark state. If the TEIE bit is set to 1 in SCR, a
transmit-end interrupt (TEI) is requested at this time
Figure 13.6 shows an example of SCI transmit operation in asynchronous mode.
0/1
D0
D1
D7
0/1
1
1
0
Start bit
0
D0
D1
D7
1
1
Data
Parity
bit
Stop
bit
Start
bit
Data
Parity
bit
Stop
bit
TDRE
TEND
Idle state
(mark state)
TEI interrupt
request
TXI interrupt
request
TXI interrupt handler
writes data in TDR and
clears TDRE flag to 0
TXI interrupt
request
1 frame
Figure 13.6 Example of SCI Transmit Operation in Asynchronous Mode
(8-Bit Data with Parity and One Stop Bit)

464
∑
Receiving Serial Data (Asynchronous Mode): Figure 13.7 shows a sample flowchart for
receiving serial data and indicates the procedure to follow.
Yes
Yes
No
No
<End>
All data received?
(2)
(1)
Initialize
(4)
(5)
(1)
(2)(3)
(4)
(5)
Start receiving
Error handling
Read ORER, PER, and FER
flags in SSR
PER
FER
OPER = 1
RDRF = 1
Read RDRF flag in SSR
(continued on next page)
Read receive data from RDR, and
clear RDRF flag to 0 in SSR
Yes
(3)
No
SCI initialization:
the receive data input function of the RxD
pin is selected automatically.
Receive error handling and break detection:
if a receive error occurs, read the ORER,
PER, and FER flags in SSR to identify the
error. After executing the necessary error
handling, clear the ORER, PER, and FER
flags all to 0. Receiving cannot resume if
any of these flags remains set to 1. When a
framing error occurs, the RxD pin can be
read to detect the break state.
SCI status check and receive data read:
read SSR, check that the RDRF flag is set
to 1, then read receive data from RDR and
clear the RDRF flag to 0. Notification that
the RDRF flag has changed from 0 to 1 can
also be given by the RXI interrupt.
To continue receiving serial data:
check the RDRF flag, read RDR, and clear
the RDRF flag to 0 before the stop bit of the
current frame is received. When the DMAC
is activated by a receive-data-full interrupt
request (RXI) to read RDR, the RDRF flag
is cleared automatically.
Clear RE bit to 0 in SCR
Figure 13.7 Sample Flowchart for Receiving Serial Data
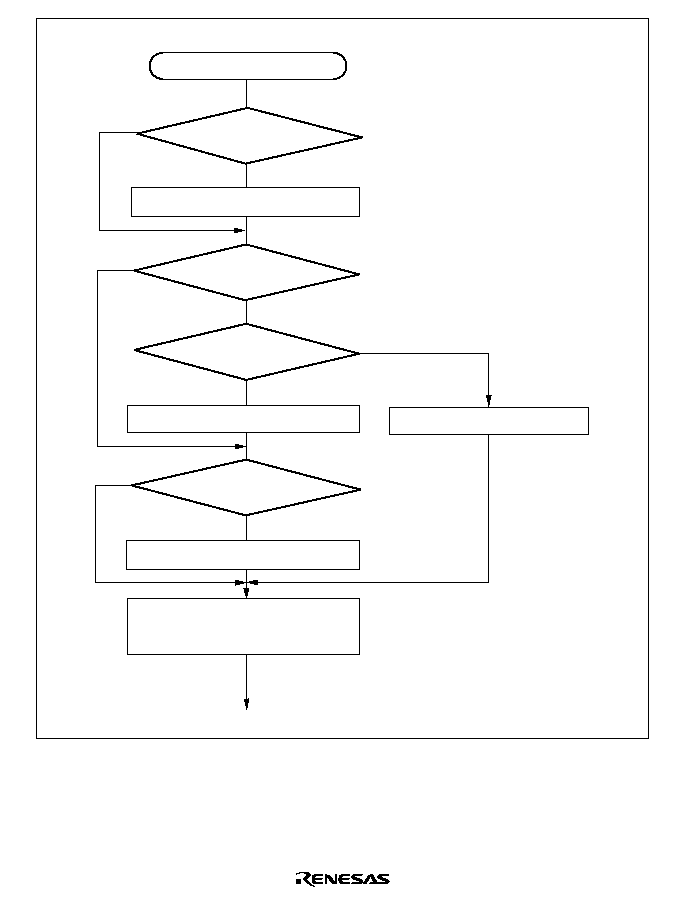
465
Yes
<End>
Error handling
Yes
No
Yes
Yes
No
No
No
ORER = 1
Overrun error handling
FER = 1
Break?
Framing error handling
Clear RE bit to 0 in SCR
PER = 1
Parity error handling
Clear ORER, PER, and FER flags
to 0 in SSR
(3)
Figure 13.7 Sample Flowchart for Receiving Serial Data (cont)
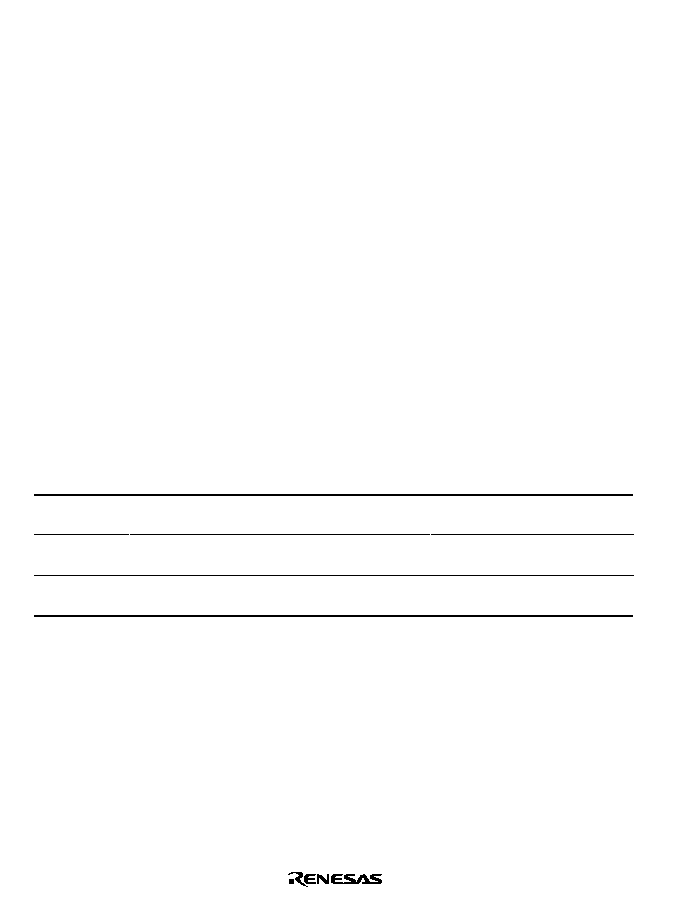
466
In receiving, the SCI operates as follows:
∑
The SCI monitors the communication line. When it detects a start bit (0 bit), the SCI
synchronizes internally and starts receiving.
∑
Receive data is stored in RSR in order from LSB to MSB.
∑
The parity bit and stop bit are received.
After receiving these bits, the SCI carries out the following checks:
Parity check: The number of 1s in the receive data must match the even or odd parity
setting of in the O/
E bit in SMR.
Stop bit check: The stop bit value must be 1. If there are two stop bits, only the first is
checked.
Status check: The RDRF flag must be 0, indicating that the receive data can be transferred
from RSR into RDR.
If these all checks pass, the RDRF flag is set to 1 and the received data is stored in RDR. If
one of the checks fails (receive error
*
), the SCI operates as shown in table 13.11.
Note:
*
When a receive error occurs, further receiving is disabled. In receiving, the RDRF flag
is not set to 1. Be sure to clear the error flags to 0.
∑
When the RDRF flag is set to 1, if the RIE bit is set to 1 in SCR, a receive-data-full interrupt
(RXI) is requested. If the ORER, PER, or FER flag is set to 1 and the RIE bit in SCR is also
set to 1, a receive-error interrupt (ERI) is requested.
Table 13.11 Receive Error Conditions
Receive Error Abbreviation Condition
Data Transfer
Overrun error ORER
Receiving of next data ends while
RDRF flag is still set to 1 in SSR
Receive data is not transferred
from RSR to RDR
Framing error FER
Stop bit is 0
Receive data is transferred from
RSR to RDR
Parity error
PER
Parity of received data differs from
even/odd parity setting in SMR
Receive data is transferred from
RSR to RDR
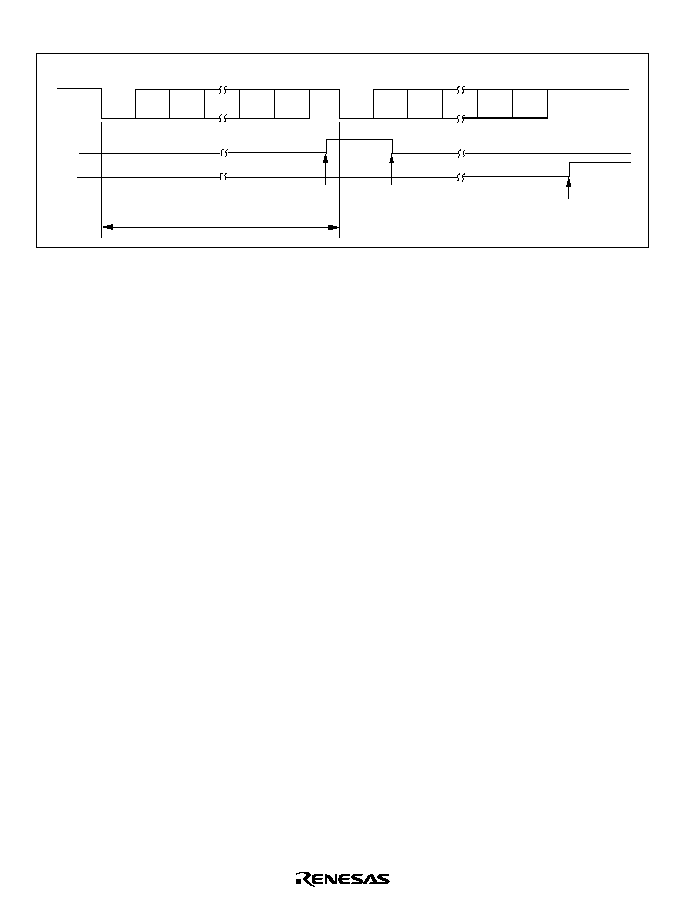
467
Figure 13.8 shows an example of SCI receive operation in asynchronous mode.
0/1
D0
D1
D7
0/1
1
1
0
Start
bit
0
D0
D1
D7
1
1
Data
Data
Parity
bit
Parity
bit
Stop
bit
Stop
bit
Stop
bit
Start
bit
RDRF
FER
Idle (mark) state
Framing error,
ERI request
RXI request
RXI interrupt handler
reads data in RDR and
clears RDRF flag to 0
1 frame
Figure 13.8 Example of SCI Receive Operation
(8-Bit Data with Parity and One Stop Bit)
13.3.3
Multiprocessor Communication
The multiprocessor communication function enables several processors to share a single serial
communication line. The processors communicate in asynchronous mode using a format with an
additional multiprocessor bit (multiprocessor format).
In multiprocessor communication, each receiving processor is addressed by an ID. A serial
communication cycle consists of an ID-sending cycle that identifies the receiving processor, and a
data-sending cycle. The multiprocessor bit distinguishes ID-sending cycles from data-sending
cycles.
The transmitting processor stars by sending the ID of the receiving processor with which it wants
to communicate as data with the multiprocessor bit set to 1. Next the transmitting processor sends
transmit data with the multiprocessor bit cleared to 0.
Receiving processors skip incoming data until they receive data with the multiprocessor bit set to
1. When they receive data with the multiprocessor bit set to 1, receiving processors compare the
data with their IDs. Processors with IDs not matching the received data skip further incoming data
until they again receive data with the multiprocessor bit set to 1. Multiple processors can send and
receive data in this way.
Figure 13.9 shows an example of communication among different processors using a
multiprocessor format.
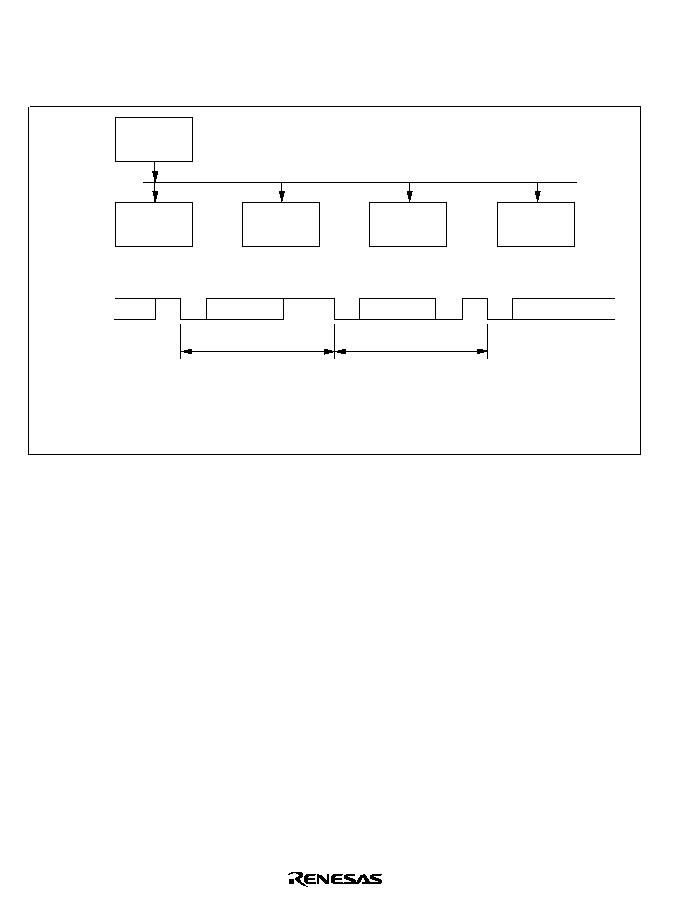
468
Communication Formats: Four formats are available. Parity bit settings are ignored when a
multiprocessor format is selected. For details see table 13.10.
Clock: See the description of asynchronous mode.
(ID=04)
(ID=01)
(ID=02)
(ID=03)
Transmitting
processor
Receiving
processor B
Receiving
processor A
Receiving
processor C
Receiving
processor D
H'01
(MPB=1)
Serial data
H'AA
(MPB=0)
Serial communication line
ID-sending cycle:
receiving processor address
Data-sending cycle:
data sent to receiving processor
specified by ID
Legend
MPB : Multiprocessor bit
Figure 13.9 Example of Communication among Processors using Multiprocessor Format
(Sending Data H'AA to Receiving Processor A)
Transmitting and Receiving Data:
∑
Transmitting Multiprocessor Serial Data: Figure 13.10 shows a sample flowchart for
transmitting multiprocessor serial data and indicates the procedure to follow.
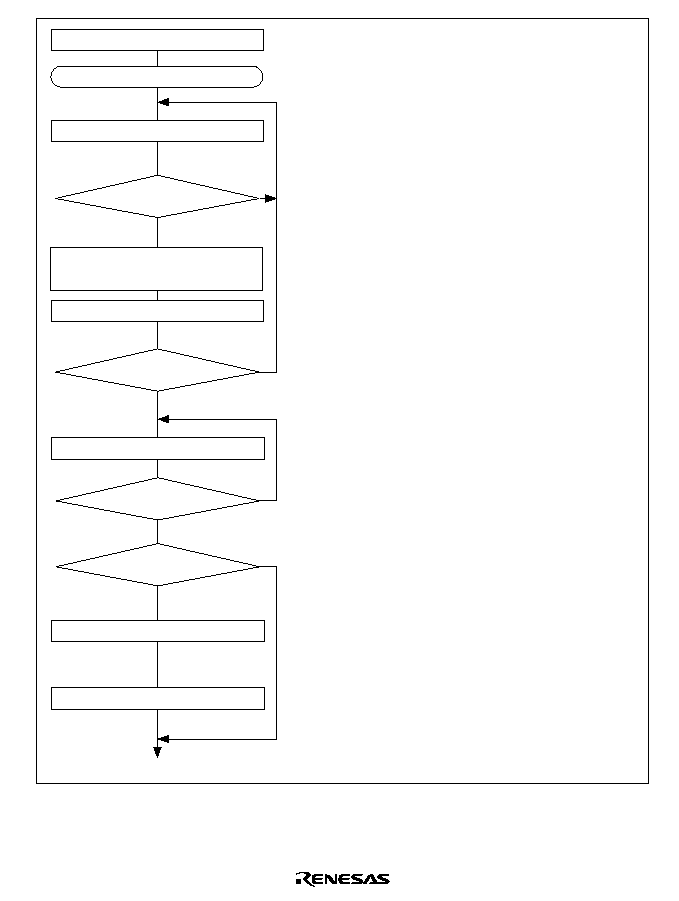
469
TEND = 1
No
No
Read TEND flag in SSR
Yes
Yes
Yes
Yes
No
No
<End>
Clear TE bit to 0 in SCR
Clear DR bit to 0 and set DDR to 1
(2)
(1)
Initialize
(3)
(4)
(1)
(2)
(3)
(4)
TDRE = 1
All data transmitted?
Read TDRE flag in SSR
Start transmitting
Write transmit data in TDR
and set MPBT bit in SSR
Clear TDRE flag to 0
Output break signal?
SCI initialization:
the transmit data output function of the TxD pin
is selected automatically.
SCI status check and transmit data write:
read SSR, check that the TDRE flag is 1, then
write transmit data in TDR. Also set the MPBT
flag to 0 or 1 in SSR. Finally, clear the TDRE
flag to 0.
To continue transmitting serial data:
after checking that the TDRE flag is 1,
indicating that data can be written, write data
in TDR, then clear the TDRE flag to 0. When
the DMAC is activated by a transmit-data-
empty interrupt request (TXI) to write data in
TDR, the TDRE flag is checked and cleared
automatically.
To output a break signal at the end of serial
transmission:
set the DDR bit to 1 and clear the DR bit to 0
(DDR and DR are I/O port registers), then
clear the TE bit to 0 in SCR.
Figure 13.10 Sample Flowchart for Transmitting Multiprocessor Serial Data
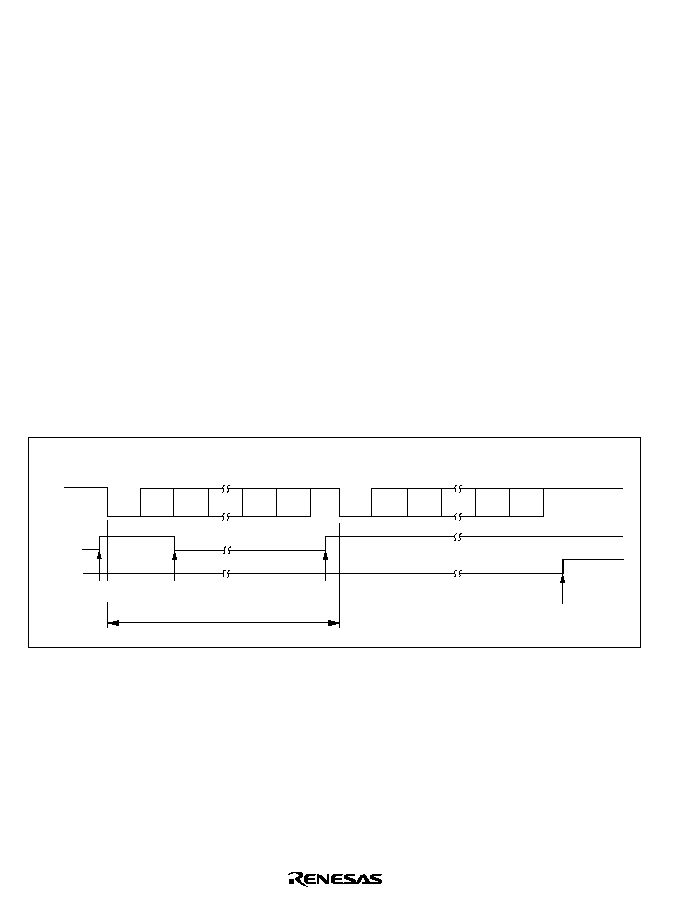
470
In transmitting serial data, the SCI operates as follows:
∑
The SCI monitors the TDRE flag in SSR. When the TDRE flag is cleared to 0, the SCI
recognizes that TDR contains new data, and loads this data from TDR into TSR.
∑
After loading the data from TDR to TSR, the SCI sets the TDRE flag to 1 and starts
transmitting. If the TIE bit is set to 1 in SCR, the SCI requests a transmit-data-empty interrupt
(TXI) at this time.
Serial transmit data is transmitted in the following order from the TxD pin:
Start bit: One 0 bit is output.
Transmit data: 7 or 8 bits are output, LSB first.
Multiprocessor bit: One multiprocessor bit (MPBT value) is output.
Stop bit(s): One or two 1 bits (stop bits) are output.
Mark state: Output of 1 bits continues until the start bit of the next transmit data.
∑
The SCI checks the TDRE flag when it outputs the stop bit. If the TDRE flag is 0, the SCI
loads new data from TDR into TSR, outputs the stop bit, then begins serial transmission of the
next frame. If the TDRE flag is 1, the SCI sets the TEND flag to 1 in SSR, outputs the stop
bit, then continues output of 1 bits in the mark state. If the TEIE bit is set to 1 in SCR, a
transmit-end interrupt (TEI) is requested at this time
Figure 13.11 shows an example of SCI transmit operation using a multiprocessor format.
D0
D1
D7
0/1
1
1
0
Start
bit
0
D0
D1
D7
0/1
1
Data
Multi-
processor
bit
Stop
bit
Start
bit
Data
Multi-
processor
bit
Stop
bit
TDRE
TEND
Idle (mark)
state
TEI interrupt
request
TEI interrupt
request
TXI interrupt handler
writes data in TDR and
clears TDRE flag to 0
TXI interrupt
request
1 frame
Figure 13.11 Example of SCI Transmit Operation
(8-Bit Data with Multiprocessor Bit and One Stop Bit)
∑
Receiving Multiprocessor Serial Data: Figure 13.12 shows a sample flowchart for receiving
multiprocessor serial data and indicates the procedure to follow.

471
Read RDRF flag in SSR
No
Yes
Yes
Yes
No
Yes
Yes
No
No
No
Read ORER and FER flags
in SSR
(3)
(1)
(2)
(4)
(1)
(2)
(3)
(4)
(5)
RDRF = 1
FER
ORER = 1
FER
ORER = 1
Start receiving
Own ID?
<End>
RDRF = 1
Read RDRF flag in SSR
Finished receiving?
Read receive data from RDR
Yes
Clear RE bit to 0 in SCR
(5)
Error handling
(continued on next page)
SCI initialization:
the receive data input function of the
RxD pin is selected automatically.
ID receive cycle:
set the MPIE bit to 1 in SCR.
SCI status check and ID check:
read SSR, check that the RDRF flag
is set to 1, then read data from RDR
and compare it with the processor's
own ID. If the ID does not match, set
the MPIE bit to 1 again and clear the
RDRF flag to 0. If the ID matches,
clear the RDRF flag to 0.
SCI status check and data receiving:
read SSR, check that the RDRF flag
is set to 1, then read data from RDR.
Receive error handling and break
detection:
if a receive error occurs, read the
ORER and FER flags in SSR to
identify the error. After executing the
necessary error handling, clear the
ORER and FER flags both to 0.
Receiving cannot resume while either
the ORER or FER flag remains set to
1. When a framing error occurs, the
RxD pin can be read to detect the
break state.
No
Set MPIE bit to 1 in SCR
Read ORER and FER flags
in SSR
Read RDRF flag in SSR
Initialize
Figure 13.12 Sample Flowchart for Receiving Multiprocessor Serial Data (1)

472
Yes
Yes
No
No
<End>
Clear ORER, PER, and FER
flags to 0 in SSR
Clear RE bit to 0 in SCR
(5)
Error handling
ORER = 1
FER = 1
No
Break?
Overrun error handling
Framing error handling
Yes
Figure 13.12 Sample Flowchart for Receiving Multiprocessor Serial Data (2)
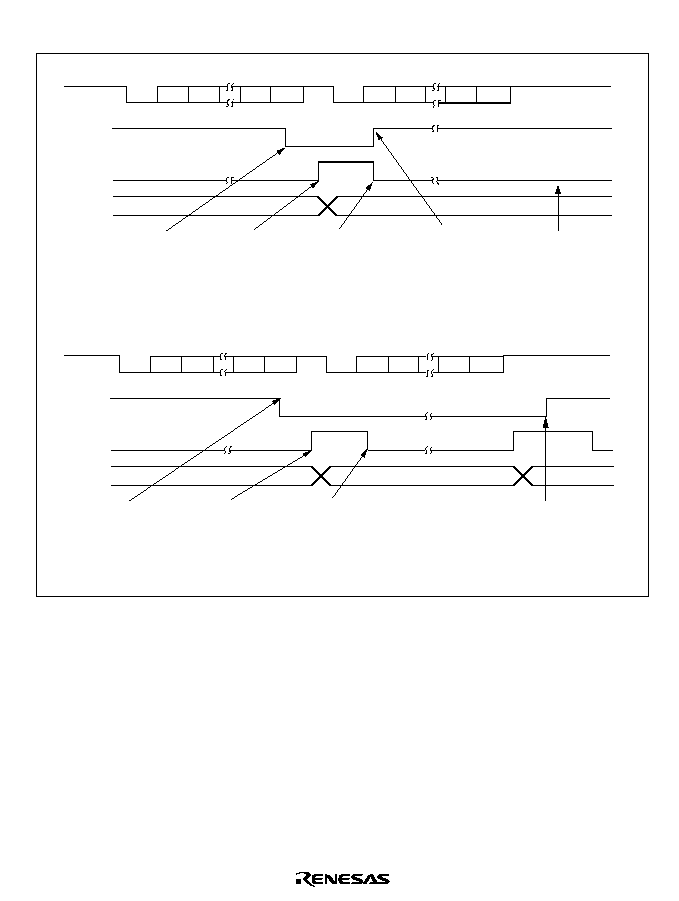
473
Figure 13.13 shows an example of SCI receive operation using a multiprocessor format.
ID2
Data2
Idle (mark)
state
Not own ID, so MPIE
bit is set to 1 again
a. Own ID does not match data
b. Own ID matches data
D0
D1
D7
1
1
0
Start
bit
Start
bit
Stop
bit
Stop
bit
0
D0
D1
D7
0
1
1
Data (ID1)
Data (data1)
Start
bit
Stop
bit
Stop
bit
Data (data1)
MPIE
Idle (mark)
state
1
MPB
RDRF
RDR value
RDR value
RXI interrupt
request
(multiprocessor
interrupt)
MPB detection
MPIE = 0
RXI interrupt handler reads
RDR data and clears
RDRF flag to 0
No RXI interrupt
request, RDR not
updated
ID1
MPB
D0
D1
D7
1
1
0
Start
bit
0
D0
D1
D7
0
1
1
Data (ID2)
MPIE
1
MPB
RDRF
RXI interrupt
request
(multiprocessor
interrupt)
MPB detection
MPIE = 0
RXI interrupt handler
reads RDR data and
clears RDRF flag to 0
Own ID, so receiving
continues, with data
received by RXI
interrupt handler
MPB
ID1
MPIE bit is set to
1 again
Figure 13.13 Example of SCI Receive Operation
(8-Bit Data with Multiprocessor Bit and One Stop Bit)
13.3.4
Synchronous Operation
In synchronous mode, the SCI transmits and receives data in synchronization with clock pulses.
This mode is suitable for high-speed serial communication.
The SCI transmitter and receiver share the same clock but are otherwise independent, so full-
duplex communication is possible. The transmitter and the receiver are also double-buffered, so
continuous transmitting or receiving is possible by reading or writing data while transmitting or
receiving is in progress.

474
Figure 13.14 shows the general format in synchronous serial communication.
Don't care
One unit (character or frame) of transfer data
MSB
Bit 0
Bit 1
Bit 3
Bit 2
Bit 4
Bit 5
Bit 6
Bit 7
L S B
Don't care
Serial clock
Serial data
*
*
Note: * High except in continuous transmitting or receiving
Figure 13.14 Data Format in Synchronous Communication
In synchronous serial communication, each data bit is placed on the communication line from one
falling edge of the serial clock to the next. Data is guaranteed valid at the rise of the serial clock.
In each character, the serial data bits are transferred in order from LSB (first) to MSB (last). After
output of the MSB, the communication line remains in the state of the MSB. In synchronous
mode the SCI receives data by synchronizing with the rise of the serial clock.
Communication Format: The data length is fixed at 8 bits. No parity bit or multiprocessor bit
can be added.
Clock: An internal clock generated by the on-chip baud rate generator or an external clock input
from the SCK pin can be selected by means of the C/
A bit in SMR and the CKE1 and CKE0 bits
in SCR. See table 13.9 for details of SCI clock source selection.
When the SCI operates on an internal clock, it outputs the clock source at the SCK pin. Eight
clock pulses are output per transmitted or received character. When the SCI is not transmitting or
receiving, the clock signal remains in the high state. If receiving in single-character units is
required, an external clock should be selected.
Transmitting and Receiving Data:
∑
SCI Initialization (Synchronous Mode): Before transmitting or receiving data, clear the TE and
RE bits to 0 in SCR, then initialize the SCI as follows.
When changing the communication mode or format, always clear the TE and RE bits to 0
before following the procedure given below. Clearing TE to 0 sets the TDRE flag to 1 and
initializes TSR. Clearing RE to 0, however, does not initialize the RDRF, PER, FER, and
ORER flags, or RDR, which retain their previous contents.
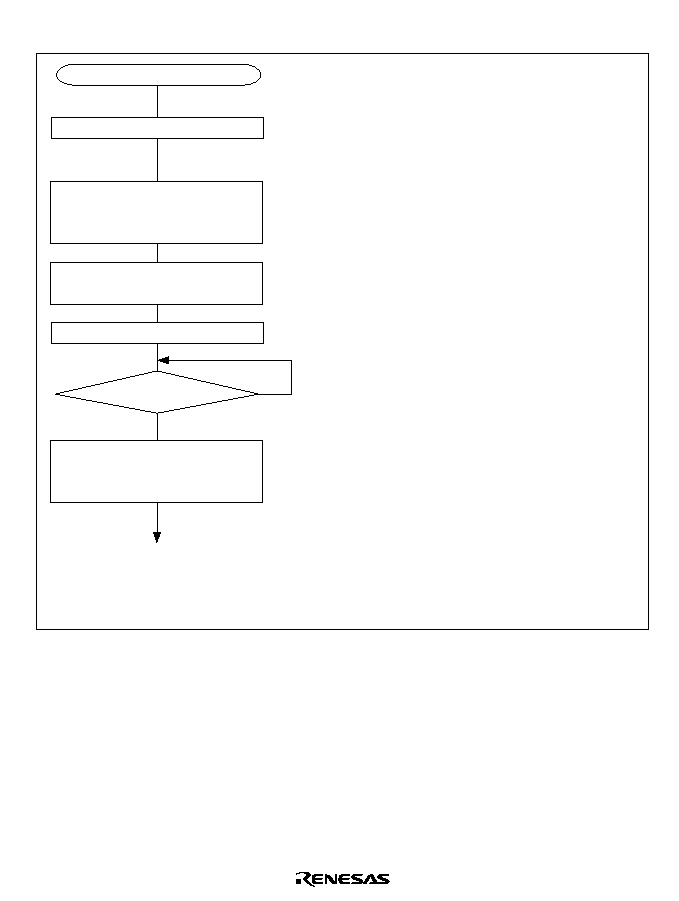
475
Figure 13.15 shows a sample flowchart for initializing the SCI.
<Start transmitting or receiving>
(4)
(3)
(2)
(1)
Start of initialization
Yes
Wait
Yes
1-bit interval elapsed?
Set value in BRR
Clear TE and RE bits to 0 in SCR
Select communication format
in SMR
Set RIE, TIE, TEIE, MPIE, CKE1
and CKE0 bits in SCR (leaving
TE and RE bits cleared to 0)
Set TE or RE bit to 1 in SCR
Set RIE, TIE, TEIE, and MPIE
bits as necessary
(1)
(2)
(3)
(4)
Set the clock source in SCR. Clear the RIE,
TIE, TEIE, MPIE, TE, and RE bits to 0.
Select the communication format in SMR.
Write the value corresponding to the bit rate in
BRR.
This step is not necessary when an external
clock is used.
Wait for at least the interval required to transmit
or receive one bit, then set the TE or RE bit to
1 in SCR. Set the RIE, TIE, TEIE, and MPIE
bits. Setting the TE or RE bit enables the SCI
to use the TxD or RxD pin.
Note: In simultaneous transmitting and receiving, the TE and RE bits should be cleared to 0 or
set to 1 simultaneously.
Figure 13.15 Sample Flowchart for SCI Initialization
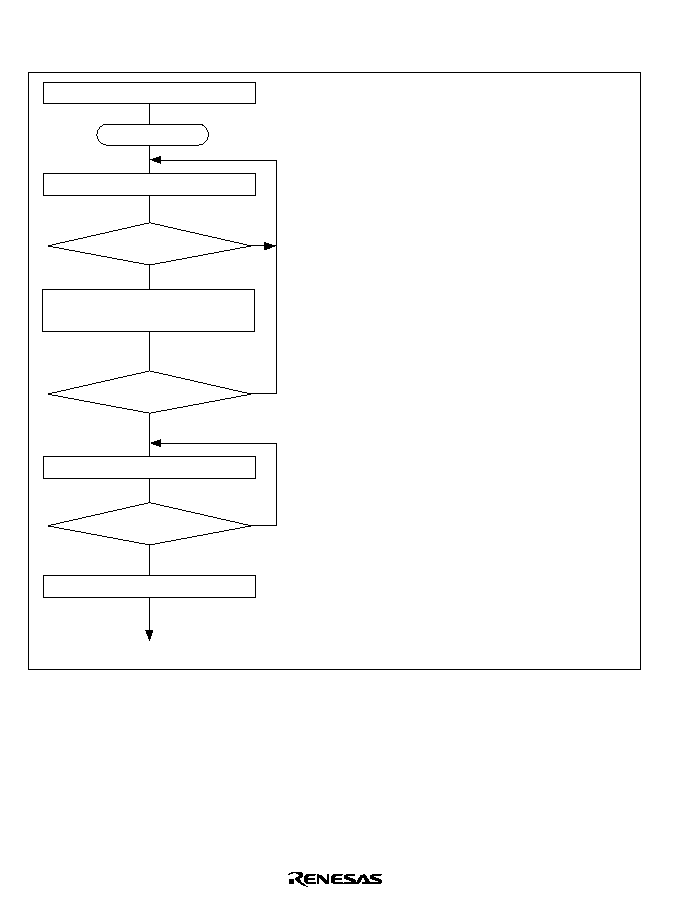
476
∑
Transmitting Serial Data (Synchronous Mode): Figure 13.16 shows a sample flowchart for
transmitting serial data and indicates the procedure to follow.
<End>
Yes
Yes
Clear TE bit to 0 in SCR
Yes
No
No
(2)
(1)
Initialize
(3)
(1)
(2)
(3)
Start transmitting
TDRE = 1
All data transmitted?
Read TEND flag in SSR
Read TDRE flag in SSR
Write transmit data in TDR
and clear TDRE flag to 0 in SSR
TEND = 1
No
SCI initialization: the transmit data output
function of the TxD pin is selected
automatically.
SCI status check and transmit data write:
read SSR, check that the TDRE flag is 1, then
write transmit data in TDR and clear the
TDRE flag to 0.
To continue transmitting serial data: after
checking that the TDRE flag is 1, indicating
that data can be written, write data in TDR,
then clear the TDRE flag to 0. When the
DMAC is activated by a transmit-data-empty
interrupt request (TXI) to write data in TDR,
the TDRE flag is checked and cleared
automatically.
Figure 13.16 Sample Flowchart for Serial Transmitting
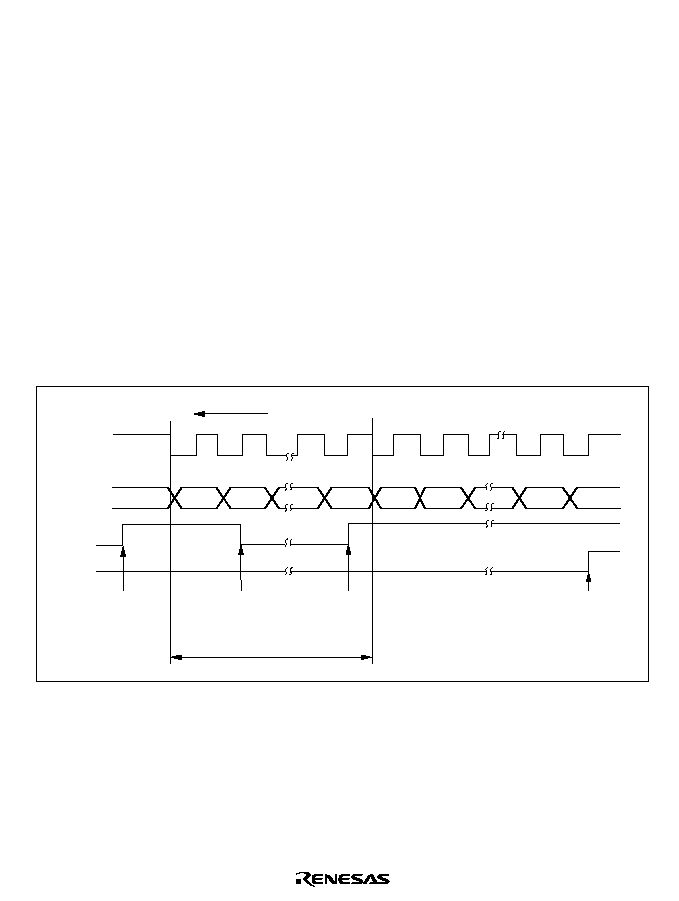
477
In transmitting serial data, the SCI operates as follows.
∑
The SCI monitors the TDRE flag in SSR. When the TDRE flag is cleared to 0, the SCI
recognizes that TDR contains new data, and loads this data from TDR into TSR.
∑
After loading the data from TDR to TSR, the SCI sets the TDRE flag to 1 and starts
transmitting. If the TIE bit is set to 1 in SCR, the SCI requests a transmit-data-empty interrupt
(TXI) at this time.
If clock output is selected, the SCI outputs eight serial clock pulses. If an external clock source
is selected, the SCI outputs data in synchronization with the input clock. Data is output from
the TxD pin n order from LSB (bit 0) to MSB (bit 7).
∑
The SCI checks the TDRE flag when it outputs the MSB (bit 7). If the TDRE flag is 0, the SCI
loads data from TDR into TSR and begins serial transmission of the next frame. If the TDRE
flag is 1, the SCI sets the TEND flag to 1 in SSR, and after transmitting the MSB, holds the
TxD pin in the MSB state. If the TEIE bit is set to 1 in SCR, a transmit-end interrupt (TEI) is
requested at this time
∑
After the end of serial transmission, the SCK pin is held in a constant state.
Figure 13.17 shows an example of SCI transmit operation.
Bit 0
Bit 1
Bit 7
Bit 0
Bit 1
Bit 6
Bit 7
Serial clock
Serial data
1 frame
TXI interrupt
request
TXI interrupt handler
writes data in TDR
and clears TDRE
flag to 0
TXI interrupt
request
TEI interrupt
request
Transmit direction
TEND
TDRE
Figure 13.17 Example of SCI Transmit Operation
∑
Receiving Serial Data (Synchronous Mode): Figure 13.18 shows a sample flowchart for
receiving serial data and indicates the procedure to follow. When switching from
asynchronous to synchronous mode. make sure that the ORER, PER, and FER flags are cleared
to 0. If the FER or PER flag is set to 1 the RDRF flag will not be set and both transmitting and
receiving will be disabled.
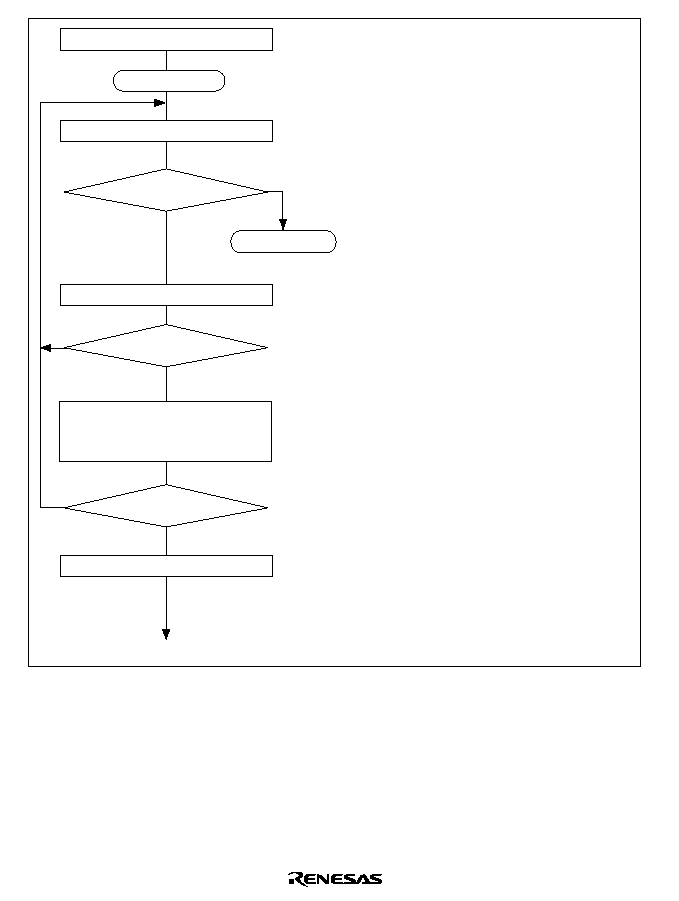
478
Yes
Yes
No
No
<End>
Clear RE bit to 0 in SCR
Finished receiving?
(2)
(1)
Initialize
(4)
(3)
(5)
(1)
(2)(3)
(4)
(5)
Start receiving
Error handling
ORER = 1
RDRF = 1
Read RDRF flag in SSR
Read ORER flag in SSR
(continued on next page)
Read receive data from
RDR, and clear RDRF
flag to 0 in SSR
No
Yes
SCI initialization: the receive data
input function of the RxD pin is
selected automatically.
Receive error handling: if a receive
error occurs, read the ORER flag in
SSR, then after executing the
necessary error handling, clear the
ORER flag to 0. Neither transmitting
nor receiving can resume while the
ORER flag remains set to 1.
SCI status check and receive data
read: read SSR, check that the RDRF
flag is set to 1, then read receive data
from RDR and clear the RDRF flag to
0. Notification that the RDRF flag
has changed from 0 to 1 can also be
given by the RXI interrupt.
To continue receiving serial data:
check the RDRF flag, read RDR, and
clear the RDRF flag to 0 before the
MSB (bit 7) of the current frame is
received. When the DMAC is
activated by a receive-data-full
interrupt request (RXI) to read RDR,
the RDRF flag is cleared
automatically.
Figure 13.18 Sample Flowchart for Serial Receiving
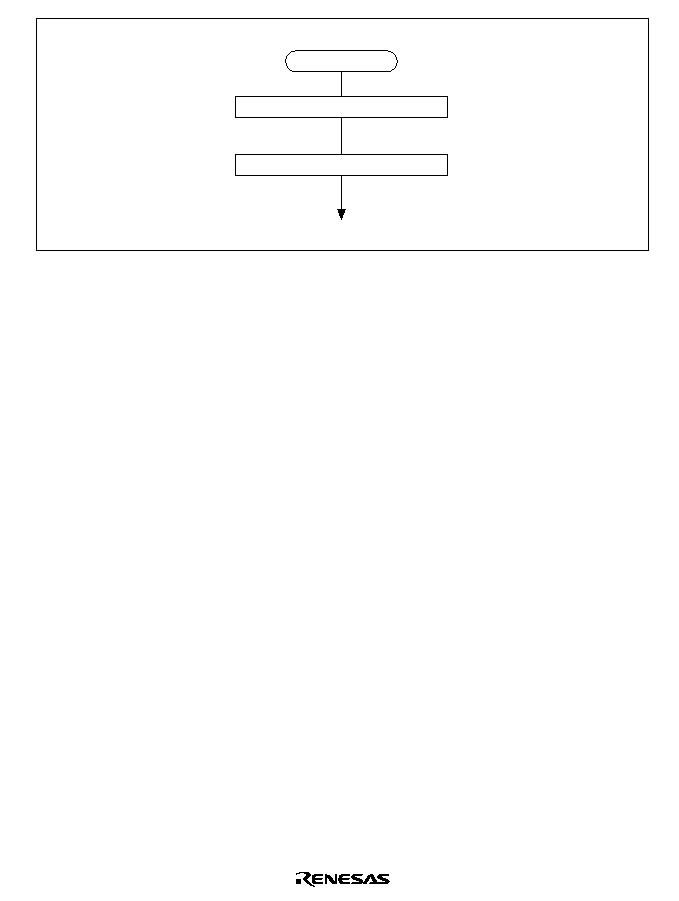
479
<End>
(3)
Error handling
Overrun error handling
Clear ORER flag to 0 in SSR
Figure 13.18 Sample Flowchart for Serial Receiving (cont)
In receiving, the SCI operates as follows:
∑
The SCI synchronizes with serial clock input or output and synchronizes internally.
∑
Receive data is stored in RSR in order from LSB to MSB.
After receiving the data, the SCI checks that the RDRF flag is 0, so that receive data can be
transferred from RSR to RDR. If this check passes, the RDRF flag is set to 1 and the received
data is stored in RDR. If the checks fails (receive error), the SCI operates as shown in table
13.11.
When a receive error has been identified in the error check, subsequent transmit and receive
operations are disabled.
∑
When the RDRF flag is set to 1, if the RIE bit is set to 1 in SCR, a receive-data-full interrupt
(RXI) is requested. If the ORER flag is set to 1 and the RIE bit in SCR is also set to 1, a
receive-error interrupt (ERI) is requested.

480
Figure 13.19 shows an example of SCI receive operation.
Serial clock
Serial data
RXI interrupt handler
reads data in RDR and
clears RDRF flag to 0
RXI interrupt
request
RXI interrupt
request
Overrun error,
ERI interrupt
request
ORER
RDRF
Bit 7
Bit 0
Bit 7
Bit 0
Bit 1
Bit 6
Bit 7
1 frame
Figure 13.19 Example of SCI Receive Operation

481
∑
Transmitting and Receiving Data Simultaneously (Synchronous Mode): Figure 13.20 shows a
sample flowchart for transmitting and receiving serial data simultaneously and indicates the
procedure to follow.
Yes
No
No
<End>
Read receive data from RDR, and
clear RDRF flag to 0 in SSR
Yes
No
No
(2)
(1)
Initialize
(3)
(5)
(4)
(1)
(2)
(3)
(4)
(5)
Start of transmitting and receiving
Error handling
TDRE = 1
ORER = 1
Read ORER flag in SSR
Read RDRF flag in SSR
Read TDRE flag in SSR
Write transmit data in TDR and
clear TDRE flag to 0 in SSR
Yes
End of transmitting
and receiving?
Clear TE and RE bits to 0 in SCR
RDRF = 1
Yes
SCI initialization: the transmit data output function of the
TxD pin and the read data input function of the RxD pin
are selected, enabling simultaneous transmitting and
receiving.
SCI status check and transmit data write: read SSR, check
that the TDRE flag is 1, then write transmit data in TDR
and clear the TDRE flag to 0.
Notification that the TDRE flag has changed from 0 to 1
can also be given by the TXI interrupt.
Receive error handling: if a receive error occurs, read the
ORER flag in SSR, then after executing the necessary
error handling, clear the ORER flag to 0.
Neither transmitting nor receiving can resume while the
ORER flag remains set to 1.
SCI status check and receive data read: read SSR, check
that the RDRF flag is 1, then read receive data from RDR
and clear the RDRF flag to 0. Notification that the RDRF
flag has changed from 0 to 1 can also be given by the RXI
interrupt.
To continue transmitting and receiving serial data: check
the RDRF flag, read RDR, and clear the RDRF flag to 0
before the MSB (bit 7) of the current frame is received.
Also check that the TDRE flag is set to 1, indicating that
data can be written, write data in TDR, then clear the
TDRE flag to 0 before the MSB (bit 7) of the current frame
is transmitted. When the DMAC is activated by a transmit
-data-empty interrupt request (TXI) to write data in TDR,
the TDRE flag is checked and cleared automatically.
When the DMAC is activated by a receive-data-full
interrupt request (RXI) to read RDR, the RDRF flag is
cleared automatically.
Note: When switching from transmitting or receiving to simultaneous transmitting and receiving, clear both the TE bit
and the RE bit to 0, then set both bits to 1 simultaneously.
Figure 13.20 Sample Flowchart for Simultaneous Serial Transmitting and Receiving
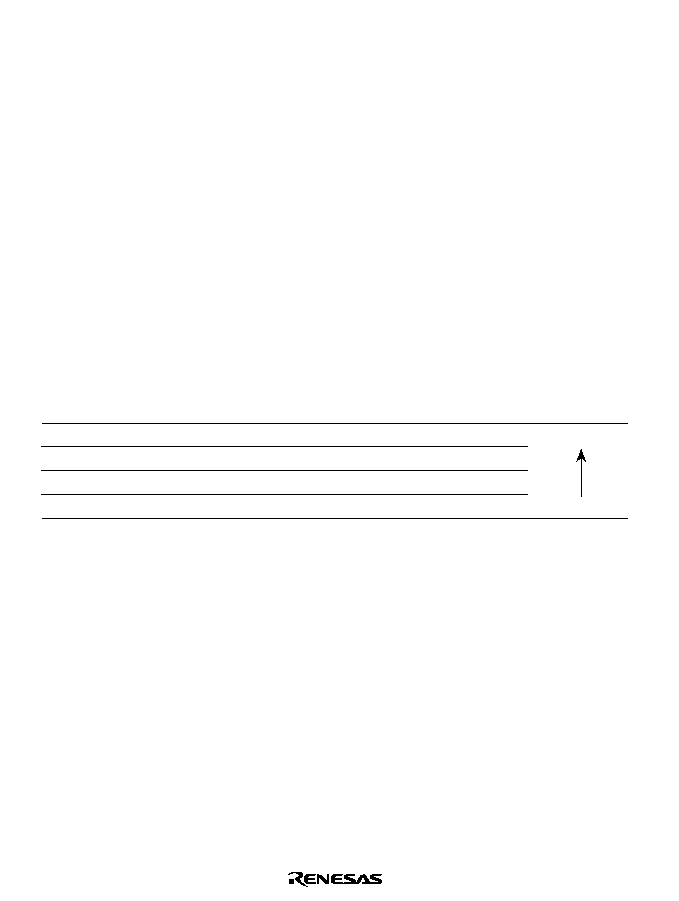
482
13.4
SCI Interrupts
The SCI has four interrupt request sources: transmit-end interrupt (TEI), receive-error (ERI),
receive-data-full (RXI), and transmit-data-empty interrupt (TXI). Table 13.12 lists the interrupt
sources and indicates their priority. These interrupts can be enabled or disabled by the TIE, RIE,
and TEIE bits in SCR. Each interrupt request is sent separately to the interrupt controller.
A TXI interrupt is requested when the TDRE flag is set to 1 in SSR. A TEI interrupt is requested
when the TEND flag is set to 1 in SSR. A TXI interrupt request can activate the DMAC to
transfer data. Data transfer by the DMAC automatically clears the TDRE flag to 0. A TEI
interrupt request cannot activate the DMAC.
An RXI interrupt is requested when the RDRF flag is set to 1 in SSR. An ERI interrupt is
requested when the ORER, PER, or FER flag is set to 1 in SSR. An RXI interrupt can activate the
DMAC to transfer data. Data transfer by the DMAC automatically clears the RDRF flag to 0. An
ERI interrupt request cannot activate the DMAC.
The DMAC can be activated by interrupts from SCI channel 0.
Table 13.12 SCI Interrupt Sources
Priority
Interrupt Source
Description
High
ERI
Receive error (ORER, FER, or PER)
RXI
Receive data register full (RDRF)
TXI
Transmit data register empty (TDRE)
Low
Transmit end (TEND)
TEI
483
13.5
Usage Notes
13.5.1
Notes on Use of SCI
Note the following points when using the SCI.
TDR Write and TDRE Flag: The TDRE flag in SSR is a status flag indicating the loading of
transmit data from TDR to TSR. The SCI sets the TDRE flag to 1 when it transfers data from
TDR to TSR.
Data can be written into TDR regardless of the state of the TDRE flag. If new data is written in
TDR when the TDRE flag is 0, the old data stored in TDR will be lost because this data has not
yet been transferred to TSR. Before writing transmit data in TDR, be sure to check that the TDRE
flag is set to 1.
Simultaneous Multiple Receive Errors: Table 13.13 shows the state of the SSR status flags
when multiple receive errors occur simultaneously. When an overrun error occurs the RSR
contents are not transferred to RDR, so receive data is lost.
Table 13.13 SSR Status Flags and Transfer of Receive Data
SSR Status Flags
Receive Data
Transfer
RDRF
ORER
FER
PER
RSR
RDR
Receive Errors
1
1
0
0
Not transferred Overrun error
0
0
1
0
Transferred
Framing error
0
0
0
1
Transferred
Parity error
1
1
1
0
Not transferred Overrun error +
framing error
1
1
0
1
Not transferred Overrun error +
parity error
0
0
1
1
Transferred
Framing error +
parity error
1
1
1
1
Not transferred Overrun error +
framing error +
parity error
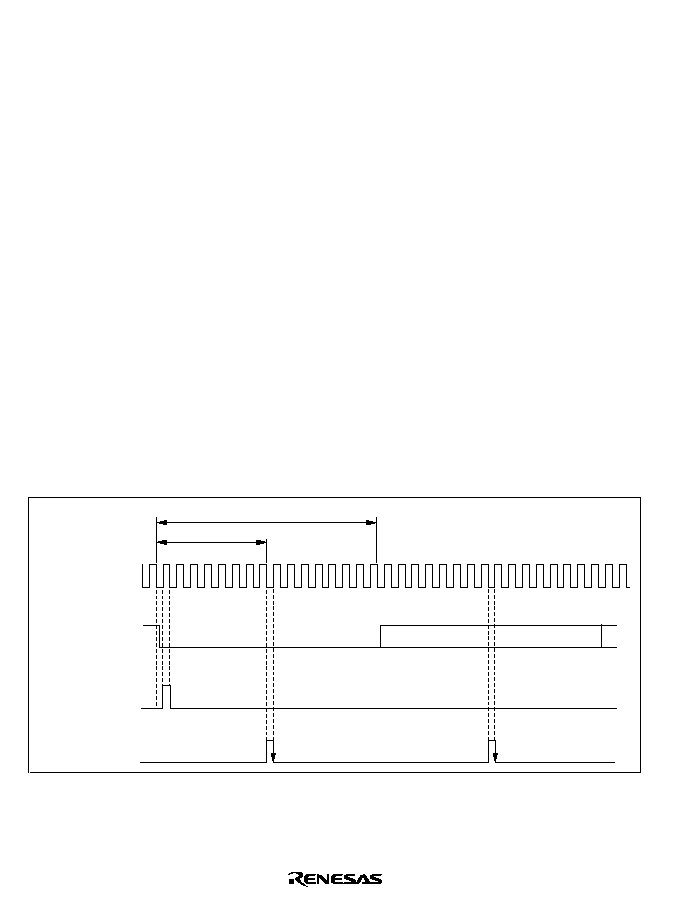
484
Break Detection and Processing: Break signals can be detected by reading the RxD pin directly
when a framing error (FER) is detected. In the break state the input from the RxD pin consists of
all 0s, so the FER flag is set and the parity error flag (PER) may also be set. In the break state the
SCI receiver continues to operate, so if the FER flag is cleared to 0 it will be set to 1 again.
Sending a Break Signal: The input/output condition and level of the TxD pin are determined by
DR and DDR bits. This feature can be used to send a break signal.
After the serial transmitter is initialized, the DR value substitutes for the mark state until the TE bit
is set to 1 (the TxD pin function is not selected until the TE bit is set to 1). The DDR and DR bits
should therefore be set to 1 beforehand.
To send a break signal during serial transmission, clear the DR bit to 0 , then clear the TE bit to 0.
When the TE bit is cleared to 0 the transmitter is initialized, regardless of its current state, so the
TxD pin becomes an input/output outputting the value 0.
Receive Error Flags and Transmitter Operation (Synchronous Mode Only): When a receive
error flag (ORER, PER, or FER) is set to 1 the SCI will not start transmitting, even if the TDRE
flag is cleared to 0. Be sure to clear the receive error flags to 0 when starting to transmit. Note
that clearing the RE bit to 0 does not clear the receive error flags to 0.
Receive Data Sampling Timing in Asynchronous Mode and Receive Margin: In asynchronous
mode the SCI operates on a base clock with 16 times the bit rate frequency. In receiving, the SCI
synchronizes internally with the fall of the start bit, which it samples on the base clock. Receive
data is latched at the rising edge of the eighth base clock pulse. See figure 13.21.
15 0
Internal base clock
8 clocks
7
0
Receive data
(RxD)
Synchronization
sampling timing
Data sampling
timing
15 0
D
0
D
1
Start bit
16 clocks
7
Figure 13.21 Receive Data Sampling Timing in Asynchronous Mode

485
The receive margin in asynchronous mode can therefore be expressed as shown in equation (1).
M =
(0.5 ≠
1
2N
D ≠ 0.5
N
) ≠ (L ≠ 0.5) F ≠
(1 + F)
◊
100%
. . . . . . . . (1)
M:
Receive margin (%)
N:
Ratio of clock frequency to bit rate (N = 16)
D:
Clock duty cycle (L = 0 to 1.0)
L:
Frame length (L = 9 to 12)
F:
Absolute deviation of clock frequency
From equation (1), if F = 0 and D = 0.5, the receive margin is 46.875%, as given by equation (2).
M =
2
◊
16
)
◊
100%
(0.5
≠
1
D = 0.5, F = 0
= 46.875%
. . . . . . . . (2)
This is a theoretical value. A reasonable margin to allow in system designs is 20% to 30%.
Restrictions on Use of DMAC:
∑
When an external clock source is used for the serial clock, after the DMAC updates TDR,
allow an inversion of at least five system clock (
) cycles before input of the serial clock to
start transmitting. If the serial clock is input within four states of the TDR update, a
malfunction may occur. (See figure 13.22)
∑
To have the DMAC read RDR, be sure to select the corresponding SCI receive-data-full
interrupt (RXI) as the activation source with bits DTS2 to DTS0 in DTCR.
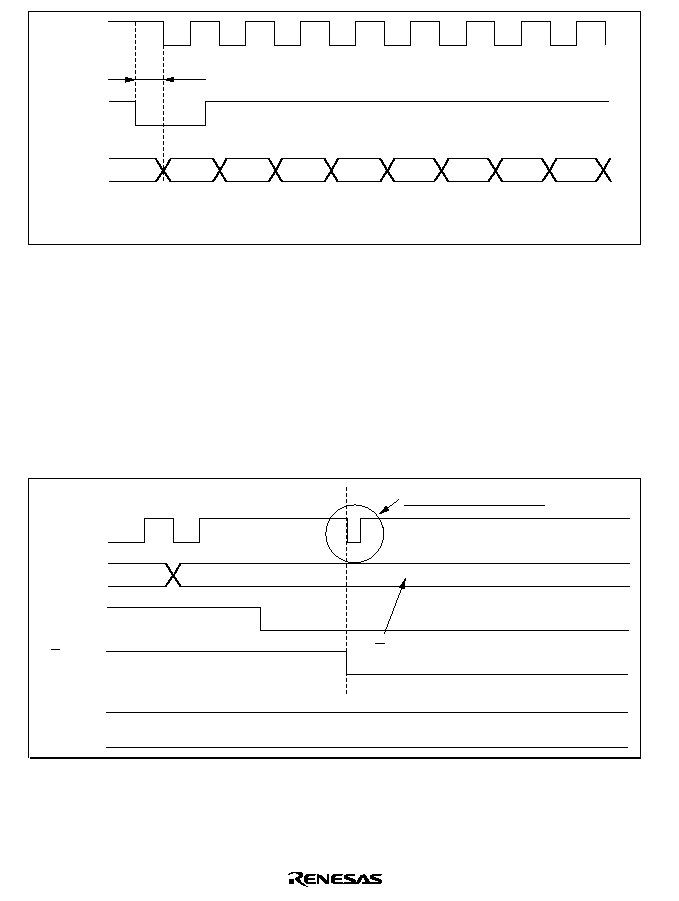
486
SCK
D0
D1
D2
D3
D4
D5
D6
D7
TDRE
t
Note: In operation with an external clock source, be sure that t >4 states.
Figure 13.22 Example of Synchronous Transmission Using DMAC
Switching from SCK Pin Function to Port Pin Function:
∑
Problem in Operation: When switching the SCK pin function to the output port function (high-
level output) by making the following settings while DDR = 1, DR = 1, C/
A = 1, CKE1 = 0,
CKE0 = 0, and TE = 1 (synchronous mode), low-level output occurs for one half-cycle.
1. End of serial data transmission
2. TE bit = 0
3. C/
A bit = 0 ... switchover to port output
4. Occurrence of low-level output (see figure 13.23)
SCK/port
Data
TE
C/A
CKE1
CKE0
Bit 7
Bit 6
1. End of transmission
4. Low-level output
3.C/A=0
2. TE= 0
Half-cycle low-level output
Figure 13.23 Operation when Switching from SCK Pin Function to Port Pin Function
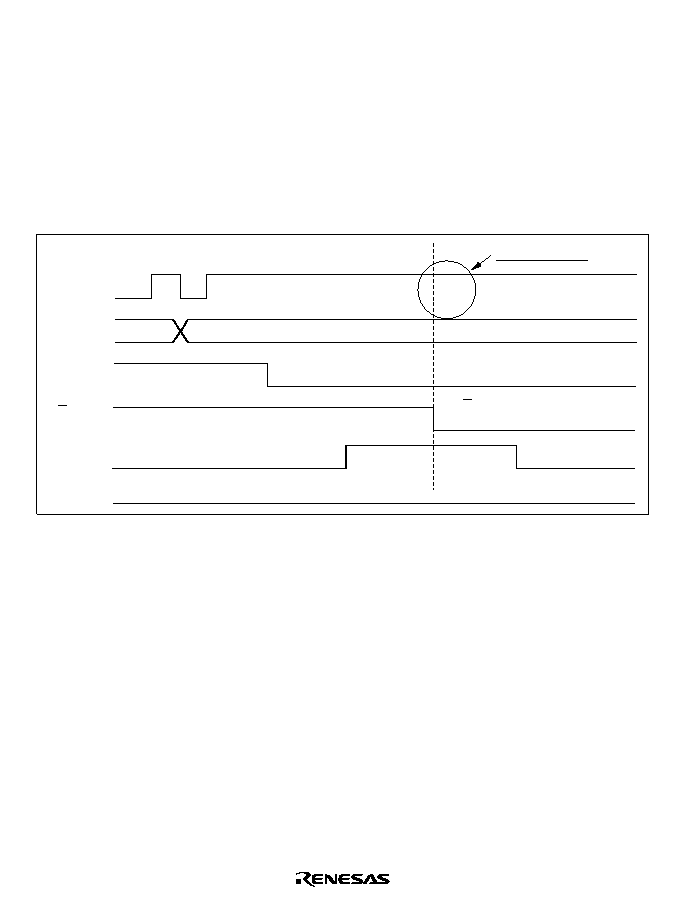
487
∑
Sample Procedure for Avoiding Low-Level Output: As this sample procedure temporarily
places the SCK pin in the input state, the SCK/port pin should be pulled up beforehand with an
external circuit.
With DDR = 1, DR = 1, C/
A = 1, CKE1 = 0, CKE0 = 0, and TE = 1, make the following
settings in the order shown.
1. End of serial data transmission
2. TE bit = 0
3. CKE1 bit = 1
4. C/
A bit = 0 ... switchover to port output
5. CKE1 bit = 0
SCK/port
Data
TE
C/A
CKE1
CKE0
Bit 7
Bit 6
1. End of transmission
3.CKE1= 1
5.CKE1= 0
4.C/A= 0
2.TE= 0
High-level output
Figure 13.24 Operation when Switching from SCK Pin Function to Port Pin Function
(Example of Preventing Low-Level Output)

489
Section 14 Smart Card Interface
14.1
Overview
An IC card (smart card) interface conforming to the ISO/IEC 7816-3 (Identification Card)
standard is supported as an extension of the serial communication interface (SCI) functions.
Switchover between the normal serial communication interface and the smart card interface is
controlled by a register setting.
14.1.1
Features
Features of the smart card interface supported by the H8/3067 Series are listed below.
∑
Asynchronous communication
Data length: 8 bits
Parity bit generation and checking
Transmission of error signal (parity error) in receive mode
Error signal detection and automatic data retransmission in transmit mode
Direct convention and inverse convention both supported
∑
Built-in baud rate generator allows any bit rate to be selected
∑
Three interrupt sources
There are three interrupt sources--transmit-data-empty, receive-data-full, and
transmit/receive error--that can issue requests independently.
The transmit-data-empty interrupt and receive-data-full interrupt can activate the DMA
controller (DMAC) to execute data transfer.
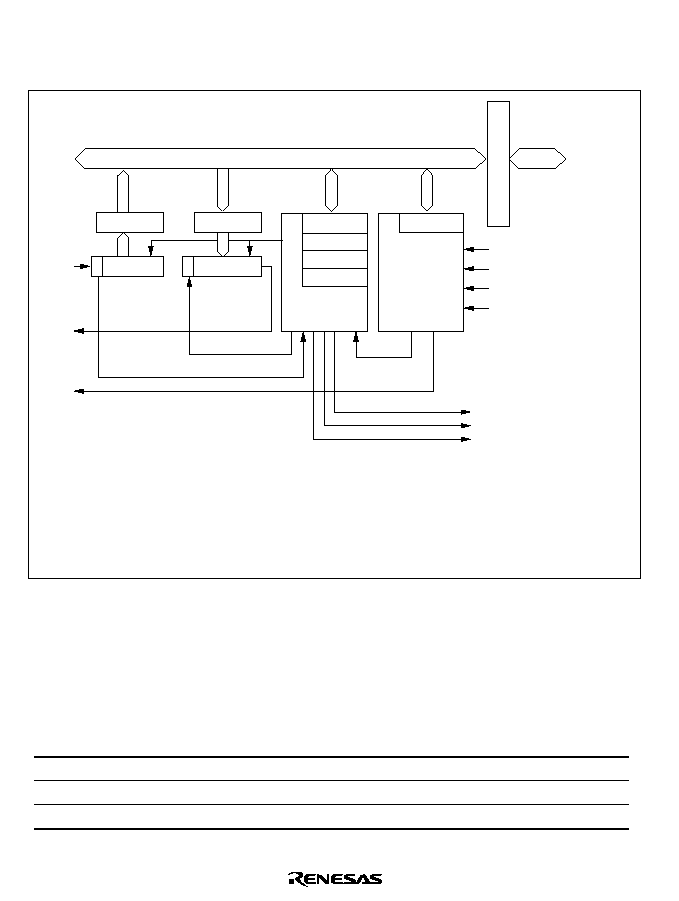
490
14.1.2
Block Diagram
Figure 14.1 shows a block diagram of the smart card interface.
Bus interface
TDR
RSR
RDR
Module data bus
TSR
SCMR
SSR
SCR
Transmission/
reception
control
BRR
Baud rate
generator
Internal
data bus
RxD
TxD
SCK
Parity generation
Parity check
Clock
External clock
/4
/16
/64
TXI
RXI
ERI
SMR
Legend
SCMR: Smart card mode register
RSR:
Receive shift register
RDR:
Receive data register
TSR:
Transmit shift register
TDR:
Transmit data register
SMR:
Serial mode register
SCR:
Serial control register
SSR:
Serial status register
BRR:
Bit rate register
Figure 14.1 Block Diagram of Smart Card Interface
14.1.3
Pin Configuration
Table 14.1 shows the smart card interface pins.
Table 14.1
Smart Card Interface Pins
Pin Name
Abbreviation
I/O
Function
Serial clock pin
SCK
I/O
Clock input/output
Receive data pin
RxD
Input
Receive data input
Transmit data pin
TxD
Output
Transmit data output

491
14.1.4
Register Configuration
The smart card interface has the internal registers listed in table 14.2. The BRR, TDR, and RDR
registers have their normal serial communication interface functions, as described in section 13,
Serial Communication Interface.
Table 14.2
Smart Card Interface Registers
Channel
Address*
1
Name
Abbreviation
R/W
Initial Value
0
H'FFFB0
Serial mode register
SMR
R/W
H'00
H'FFFB1
Bit rate register
BRR
R/W
H'FF
H'FFFB2
Serial control register
SCR
R/W
H'00
H'FFFB3
Transmit data register
TDR
R/W
H'FF
H'FFFB4
Serial status register
SSR
R/(W)
*
2
H'84
H'FFFB5
Receive data register
RDR
R
H'00
H'FFFB6
Smart card mode register
SCMR
R/W
H'F2
1
H'FFFB8
Serial mode register
SMR
R/W
H'00
H'FFFB9
Bit rate register
BRR
R/W
H'FF
H'FFFBA
Serial control register
SCR
R/W
H'00
H'FFFBB
Transmit data register
TDR
R/W
H'FF
H'FFFBC
Serial status register
SSR
R/(W)
*
2
H'84
H'FFFBD
Receive data register
RDR
R
H'00
H'FFFBE
Smart card mode register
SCMR
R/W
H'F2
2
H'FFFC0
Serial mode register
SMR
R/W
H'00
H'FFFC1
Bit rate register
BRR
R/W
H'FF
H'FFFC2
Serial control register
SCR
R/W
H'00
H'FFFC3
Transmit data register
TDR
R/W
H'FF
H'FFFC4
Serial status register
SSR
R/(W)
*
2
H'84
H'FFFC5
Receive data register
RDR
R
H'00
H'FFFC6
Smart card mode register
SCMR
R/W
H'F2
Notes: 1. Lower 20 bits of the address in advanced mode.
2. Only 0 can be written in bits 7 to 3, to clear the flags.
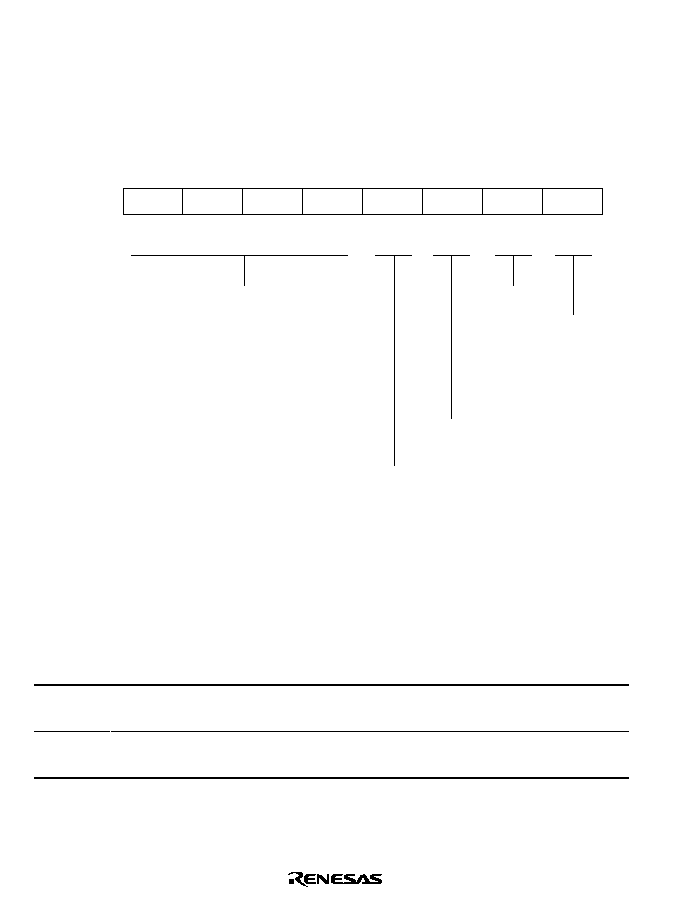
492
14.2
Register Descriptions
This section describes the new or modified registers and bit functions in the smart card interface.
14.2.1
Smart Card Mode Register (SCMR)
SCMR is an 8-bit readable/writable register that selects smart card interface functions.
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
SDIR
0
R/W
0
SMIF
0
R/W
2
SINV
0
R/W
1
--
1
--
Bit
Initial value
Read/Write
Reserved bits
Reserved bit
Smart card interface
mode select
Enables or disables
the smart card interface
function
Smart card data invert
Inverts data logic levels
Smart card data transfer direction
Selects the serial/parallel conversion format
SCMR is initialized to H'F2 by a reset and in standby mode.
Bits 7 to 4--Reserved: Read-only bits, always read as 1.
Bit 3--Smart Card Data Transfer Direction (SDIR): Selects the serial/parallel conversion
format.*
1
Bit 3
SDIR
Description
0
TDR contents are transmitted LSB-first
(Initial value)
Receive data is stored LSB-first in RDR
1
TDR contents are transmitted MSB-first
Receive data is stored MSB-first in RDR
493
Bit 2--Smart Card Data Invert (SINV): Specifies inversion of the data logic level. This
function is used in combination with the SDIR bit to communicate with inverse-convention
cards.*
2
The SINV bit does not affect the logic level of the parity bit. For parity settings, see
section 14.3.4, Register Settings.
Bit 2
SINV
Description
0
Unmodified TDR contents are transmitted
(Initial value)
Receive data is stored unmodified in RDR
1
Inverted TDR contents are transmitted
Receive data is inverted before storage in RDR
Bit 1--Reserved: Read-only bit, always read as 1.
Bit 0--Smart Card Interface Mode Select (SMIF): Enables the smart card interface function.
Bit 0
SMIF
Description
0
Smart card interface function is disabled
(Initial value)
1
Smart card interface function is enabled
Notes: 1. The function for switching between LSB-first and MSB-first mode can also be used
with the normal serial communication interface. Note that when the communication
format data length is set to 7 bits and MSB-first mode is selected for the serial data to
be transferred, bit 0 of TDR is not transmitted, and only bits 7 to 1 of the received data
are valid.
2. The data logic level inversion function can also be used with the normal serial
communication interface. Note that, when inverting the serial data to be transferred,
parity transmission and parity checking is based on the number of high-level periods at
the serial data I/O pin, and not on the register value.
494
14.2.2
Serial Status Register (SSR)
The function of SSR bit 4 is modified in smart card interface mode. This change also causes a
modification to the setting conditions for bit 2 (TEND).
7
TDRE
1
R/(W)*
6
RDRF
0
R/(W)*
5
ORER
0
R/(W)*
4
ERS
0
R/(W)*
3
PER
0
R/(W)*
0
MPBT
0
R/W
2
TEND
1
R
1
MPB
0
R
Bit
Initial value
Read/Write
Transmit end
Status flag indicating end
of transmission
Error signal status (ERS)
Status flag indicating that an error
signal has been received
Note: * Only 0 can be written, to clear the flag.
Bits 7 to 5: These bits operate as in normal serial communication. For details see section 13.2.7,
Serial Status Register (SSR).
Bit 4--Error Signal Status (ERS): In smart card interface mode, this flag indicates the status of
the error signal sent from the receiving device to the transmitting device. The smart card interface
does not detection framing errors.
Bit 4
ERS
Description
0
Indicates normal transmission, with no error signal returned
(Initial value)
[Clearing conditions]
∑
The chip is reset, or enters standby mode or module stop mode
∑
Software reads ERS while it is set to 1, then writes 0.
1
Indicates that the receiving device sent an error signal reporting a parity error
[Setting condition]
A low error signal was sampled.
Note:
Clearing the TE bit to 0 in SCR does not affect the ERS flag, which retains its previous
value.
495
Bits 3 to 0: These bits operate as in normal serial communication. For details see section 13.2.7,
Serial Status Register (SSR). The setting conditions for transmit end (TEND, bit 2), however, are
modified as follows.
Bit 2
TEND
Description
0
Transmission is in progress
[Clearing conditions]
∑
Software reads TDRE while it is set to 1, then writes 0 in the TDRE flag.
∑
The DMAC writes data in TDR.
1
End of transmission
[Setting conditions]
(Initial value)
∑
The chip is reset or enters standby mode.
∑
The TE bit and FER/ERS bit are both cleared to 0 in SCR.
∑
TDRE is 1 and ERS is 0 at a time 2.5 etu after the last bit of a 1-byte serial
character is transmitted (normal transmission).
Note:
An etu (elementary time unit) is the time needed to transmit one bit.

496
14.2.3
Serial Mode Register (SMR)
The function of SMR bit 7 is modified in smart card interface mode. This change also causes a
modification to the function of bits 1 and 0 in the serial control register (SCR).
7
GM
0
R/W
6
CHR
0
R/W
5
PE
0
R/W
4
O/
E
0
R/W
3
STOP
0
R/W
0
CKS0
0
R/W
2
MP
0
R/W
1
CKS1
0
R/W
Bit
Initial value
Read/Write
Bit 7--GSM Mode (GM): With the normal smart card interface, this bit is cleared to 0. Setting
this bit to 1 selects GSM mode, an additional mode for controlling the timing for setting the
TEND flag that indicates completion of transmission, and the type of clock output used. The
details of the additional clock output control mode are specified by the CKE1 and CKE0 bits in
the serial control register (SCR).
Bit 7
GM
Description
0
Normal smart card interface mode operation
∑
The TEND flag is set 12.5 etu after the beginning of the start bit.
∑
Clock output on/off control only.
(Initial value)
1
GSM mode smart card interface mode operation
∑
The TEND flag is set 11.0 etu after the beginning of the start bit.
∑
Clock output on/off and fixed-high/fixed-low control.
Bits 6 to 0: These bits operate as in normal serial communication. For details see section 13.2.5,
Serial Mode Register (SMR).
14.2.4
Serial Control Register (SCR)
The function of SCR bits 1 and 0 is modified in smart card interface mode.
7
TIE
0
R/W
6
RIE
0
R/W
5
TE
0
R/W
4
RE
0
R/W
3
MPIE
0
R/W
0
CKE0
0
R/W
2
TEIE
0
R/W
1
CKE1
0
R/W
Bit
Initial value
Read/Write
Bits 7 to 2: These bits operate as in normal serial communication. For details see section 13.2.6,
Serial Control Register (SCR).
497
Bits 1 and 0--Clock Enable 1 and 0 (CKE1, CKE0): These bits select the SCI clock source and
enable or disable clock output from the SCK pin. In smart card interface mode, it is possible to
specify a fixed high level or fixed low level for the clock output, in addition to the usual switching
between enabling and disabling of the clock output.
Bit 7
GM
Bit 1
CKE1
Bit 0
CKE0
Description
0
0
0
Internal clock/SCK pin is I/O port
(Initial value)
1
Internal clock/SCK pin is clock output
1
0
Internal clock/SCK pin is fixed at low output
1
Internal clock/SCK pin is clock output
1
0
Internal clock/SCK pin is fixed at high output
1
Internal clock/SCK pin is clock output
14.3
Operation
14.3.1
Overview
The main features of the smart card interface are as follows.
∑
One frame consists of 8-bit data plus a parity bit.
∑
In transmission, a guard time of at least 2 etu (elementary time units: the time for transfer of
one bit) is provided between the end of the parity bit and the start of the next frame.
∑
If a parity error is detected during reception, a low error signal level is output for a1 etu period
10.5 etu after the start bit.
∑
If an error signal is detected during transmission, the same data is transmitted automatically
after the elapse of 2 etu or longer.
∑
Only asynchronous communication is supported; there is no synchronous communication
function.
498
14.3.2
Pin Connections
Figure 14.2 shows a pin connection diagram for the smart card interface.
In communication with a smart card, since both transmission and reception are carried out on a
single data transmission line, the TxD pin and RxD pin should both be connected to this line. The
data transmission line should be pulled up to V
CC
with a resistor.
When the smart card uses the clock generated on the smart card interface, the SCK pin output is
input to the CLK pin of the smart card. If the smart card uses an internal clock, this connection is
unnecessary.
The reset signal should be output from one of this LSI's generic ports.
In addition to these pin connections. power and ground connections will normally also be
necessary.
TxD
RxD
SCK
Px (port)
This chip
V
CC
I/O
Data line
Clock line
Reset line
CLK
RST
Card-processing device
Smart card
Figure 14.2 Smart Card Interface Connection Diagram
Note:
If an IC card is not connected, and both TE and RE are set to 1, closed transmission/
reception is possible, enabling self-diagnosis to be carried out.
14.3.3
Data Format
Figure 14.3 shows the smart card interface data format. In reception in this mode, a parity check is
carried out on each frame, and if an error is detected an error signal is sent back to the transmitting
device to request retransmission of the data. In transmission, the error signal is sampled and the
same data is retransmitted if the error signal is low.
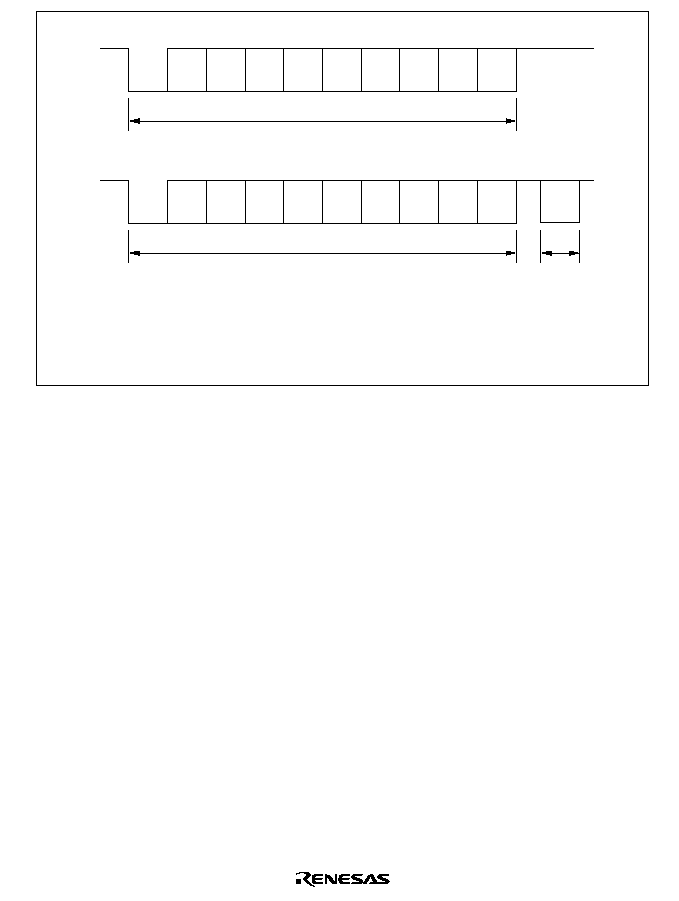
499
Ds
D0
D1
D2
D3
D4
D5
D6
D7
Dp
No parity error
Output from transmitting device
Ds
D0
D1
D2
D3
D4
D5
D6
D7
Dp
Parity error
Output from transmitting device
DE
Output from
receiving
device
Legend
Ds: Start
bit
D0 to D7: Data bits
Dp: Parity
bit
DE: Error
signal
Figure 14.3 Smart Card Interface Data Format
The operating sequence is as follows.
1. When the data line is not in use it is in the high-impedance state, and is fixed high with a pull-
up resistor.
2. The transmitting device starts transfer of one frame of data. The data frame starts with a start
bit (Ds, low-level), followed by 8 data bits (D0 to D7) and a parity bit (Dp).
3. With the smart card interface, the data line then returns to the high-impedance state. The data
line is pulled high with a pull-up resistor.
4. The receiving device carries out a parity check. If there is no parity error and the data is
received normally, the receiving device waits for reception of the next data. If a parity error
occurs, however, the receiving device outputs an error signal (DE, low-level) to request
retransmission of the data. After outputting the error signal for the prescribed length of time,
the receiving device places the signal line in the high-impedance state again. The signal line is
pulled high again by a pull-up resistor.
5. If the transmitting device does not receive an error signal, it proceeds to transmit the next data
frame. If it receives an error signal, however, it returns to step 2 and transmits the same data
again.

500
14.3.4
Register Settings
Table 14.3 shows a bit map of the registers used in the smart card interface. Bits indicated as 0 or
1 must be set to the value shown. The setting of other bits is described in this section.
Table 14.3
Smart Card Interface Register Settings
Bit
Register
Address
*1
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
SMR
H'FFFB0
GM
0
1
O/
E
1
0
CKS1
CKS0
BRR
H'FFFB1
BRR7
BRR6
BRR5
BRR4
BRR3
BRR2
BRR1
BRR0
SCR
H'FFFB2
TIE
RIE
TE
RE
0
0
CKE1
*
2
CKE0
TDR
H'FFFB3
TDR7
TDR6
TDR5
TDR4
TDR3
TDR2
TDR1
TDR0
SSR
H'FFFB4
TDRE
RDRF
ORER
ERS
PER
TEND
0
0
RDR
H'FFFB5
RDR7
RDR6
RDR5
RDR4
RDR3
RDR2
RDR1
RDR0
SCMR
H'FFFB6
--
--
--
--
SDIR
SINV
--
SMIF
Notes: -- Unused bit.
1. Lower 20 bits of the address in advanced mode.
2. When GM is cleared to 0 in SMR, the CKE1 bit must also be cleared to 0.
Serial Mode Register (SMR) Settings: Clear the GM bit to 0 when using the normal smart card
interface mode, or set to 1 when using GSM mode. Clear the O/
E bit to 0 if the smart card is of the
direct convention type, or set to 1 if of the inverse convention type.
Bits CKS1 and CKS0 select the clock source of the built-in baud rate generator. See section
14.3.5, Clock.
Bit Rate Register (BRR) Settings: BRR is used to set the bit rate. See section 14.3.5, Clock, for
the method of calculating the value to be set.
Serial Control Register (SCR) Settings: The TIE, RIE, TE, and RE bits have their normal serial
communication functions. See section 13, Serial Communication Interface, for details. The CKE1
and CKE0 bits specify clock output. To disable clock output, clear these bits to 00; to enable clock
output, set these bits to 01. Clock output is not performed when the GM bit is set to 1 in SMR.
Clock output can also be fixed low or high.
Smart Card Mode Register (SCMR) Settings: Clear both the SDIR bit and SINV bit cleared to
0 if the smart card is of the direct convention type, and set both to 1 if of the inverse convention
type. To use the smart card interface, set the SMIF bit to 1.
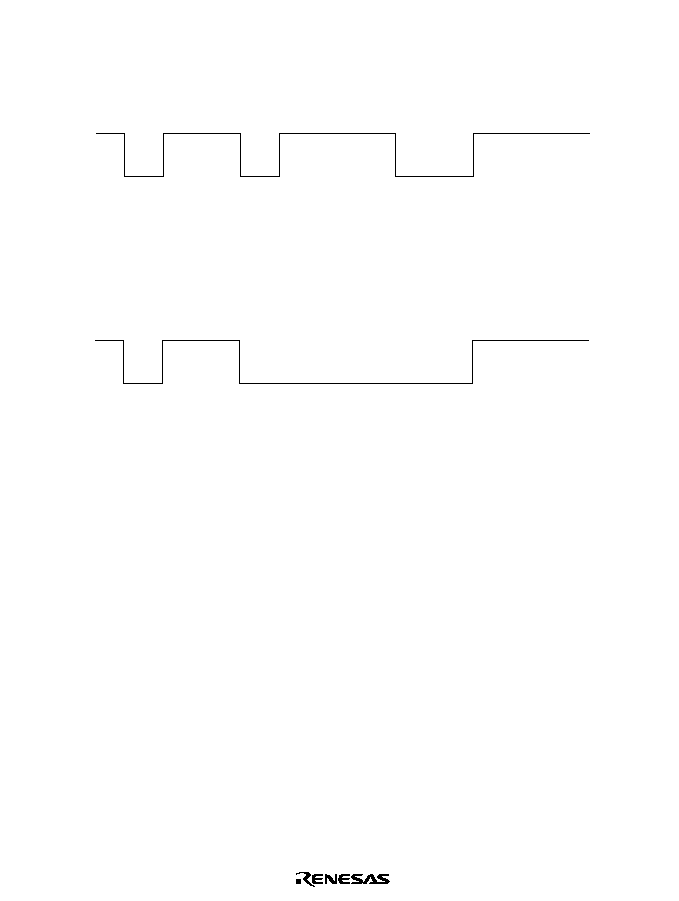
501
The register settings and examples of starting character waveforms are shown below for two smart
cards, one following the direct convention and one the inverse convention.
1. Direct Convention (SDIR = SINV = O/
E = 0)
Ds
D0
D1
D2
D3
D4
D5
D6
D7
Dp
A
Z
Z
A
Z
Z
Z
A
A
Z
(Z)
(Z)
State
With the direct convention type, the logic 0 level corresponds to state Z and the logic 1 level to
state A, and transfer is performed in LSB-first order. In the example above, the first character
data is H'3B. The parity bit is 1, following the even parity rule designated for smart cards.
2. Indirect Convention (SDIR = SINV = O/
E = 1)
Ds
D7
D6
D5
D4
D3
D2
D1
D0
Dp
A
Z
Z
A
A
A
A
A
A
Z
(Z)
(Z)
State
With the indirect convention type, the logic 1 level corresponds to state A and the logic 0 level
to state Z, and transfer is performed in MSB-first order. In the example above, the first
character data is H'3F. The parity bit is 0, corresponding to state Z, following the even parity
rule designated for smart cards.
In the H8/3067 Series, inversion specified by the SINV bit applies only to the data bits, D7 to
D0. For parity bit inversion, the O/
E bit in SMR must be set to odd parity mode. This applies
to both transmission and reception.
502
14.3.5
Clock
Only an internal clock generated by the on-chip baud rate generator can be used as the
transmit/receive clock for the smart card interface. The bit rate is set with the bit rate register
(BRR) and the CKS1 and CKS0 bits in the serial mode register (SMR). The equation for
calculating the bit rate is shown below. Table 14.5 shows some sample bit rates.
If clock output is selected with CKE0 set to 1, a clock with a frequency of 372 times the bit rate is
output from the SCK pin.
B =
1488
◊
2
2n≠1
◊
(N + 1)
◊
10
6
where, N: BRR setting (0
N
255)
B: Bit rate (bit/s)
: Operating frequency (MHz)
n: See table 14.4
Table 14.4
n-Values of CKS1 and CKS0 Settings
n
CKS1
CKS0
0
0
0
1
1
2
1
0
3
1
Note:
If the gear function is used to divide the clock frequency, use the divided frequency to
calculate the bit rate. The equation above applies directly to 1/1 frequency division.
Table 14.5
Bit Rates (bits/s) for Various BRR Settings (When n = 0)
(MHz)
N
7.1424
10.00
10.7136
13.00
14.2848
16.00
18.00
20.00
0
9600.0
13440.9
14400.0
17473.1
19200.0
21505.4
24193.5
26881.7
1
4800.0
6720.4
7200.0
8736.6
9600.0
10752.7
12096.8
13440.9
2
3200.0
4480.3
4800.0
5824.4
6400.0
7168.5
8064.5
8960.6
Note:
Bit rates are rounded off to one decimal place.

503
The following equation calculates the bit rate register (BRR) setting from the operating frequency
and bit rate. N is an integer from 0 to 255, specifying the value with the smaller error.
N =
1488
◊
2
2n≠1
◊
B
◊
10
6
≠ 1
Table 14.6
BRR Settings for Typical Bit Rates (bits/s) (When n = 0)
(MHz)
7.1424
10.00
10.7136
13.00
14.2848
16.00
18.00
20.00
bit/s
N Error
N Error
N Error
N Error
N Error
N Error
N Error
N Error
9600
0 0.00
1 30
1 25
1 8.99
1 0.00
1 12.01
2 15.99
2 6.66
Table 14.7
Maximum Bit Rates for Various Frequencies (Smart Card Interface Mode)
(MHz)
Maximum Bit Rate (bits/s)
N
n
7.1424
9600
0
0
10.00
13441
0
0
10.7136
14400
0
0
13.00
17473
0
0
14.2848
19200
0
0
16.00
21505
0
0
18.00
24194
0
0
20.00
26882
0
0
The bit rate error is given by the following equation:
Error (%) =
1488
◊
2
2n-1
◊
B
◊
(N + 1)
◊
10
6
≠ 1
◊
100

504
14.3.6
Transmitting and Receiving Data
Initialization: Before transmitting or receiving data, the smart card interface must be initialized as
described below. Initialization is also necessary when switching from transmit mode to receive
mode, or vice versa.
1. Clear the TE and RE bits to 0 in the serial control register (SCR).
2. Clear error flags FER/ERS, PER, and ORER to 0 in the serial status register (SSR).
3. Set the parity bit (O/
E) and baud rate generator select bits (CKS1 and CKS0) in the serial mode
register (SMR). Clear the C/
A, CHR, and MP bits to 0, and set the STOP and PE bits to 1.
4. Set the SMIF, SDIR, and SINV bits in the smart card mode register (SCMR).
When the SMIF bit is set to 1, the TxD pin and RxD pin are both switched from port to SCI
pin functions and go to the high-impedance state.
5. Set a value corresponding to the desired bit rate in the bit rate register (BRR).
6. Set the CKE0 bit in SCR. Clear the TIE, RIE, TE, RE, MPIE, TEIE, and CKE1 bits to 0. If the
CKE0 bit is set to 1, the clock is output from the SCK pin.
7. Wait at least one bit interval, then set the TIE, RIE, TE, and RE bits in SCR. Do not set the TE
bit and RE bit at the same time, except for self-diagnosis.
Transmitting Serial Data: As data transmission in smart card mode involves error signal
sampling and retransmission processing, the processing procedure is different from that for the
normal SCI. Figure 14.5 shows a sample transmission processing flowchart.
1. Perform smart card interface mode initialization as described in Initialization above.
2. Check that the ERS error flag is cleared to 0 in SSR.
3. Repeat steps 2 and 3 until it can be confirmed that the TEND flag is set to 1 in SSR.
4. Write the transmit data in TDR, clear the TDRE flag to 0, and perform the transmit operation.
The TEND flag is cleared to 0.
5. To continue transmitting data, go back to step 2.
6. To end transmission, clear the TE bit to 0.
The above processing may include interrupt handling DMA transfer.
If transmission ends and the TEND flag is set to 1 while the TIE bit is set to 1 and interrupt
requests are enabled, a transmit-data-empty interrupt (TXI) will be requested. If an error occurs in
transmission and the ERS flag is set to 1 while the RIE bit is set to 1 and interrupt requests are
enabled, a transmit/receive-error interrupt (ERI) will be requested.
The timing of TEND flag setting depends on the GM bit in SMR (see figure 14.4).
If the TXI interrupt activates the DMAC, the number of bytes designated in the DMAC can be
transmitted automatically, including automatic retransmission.
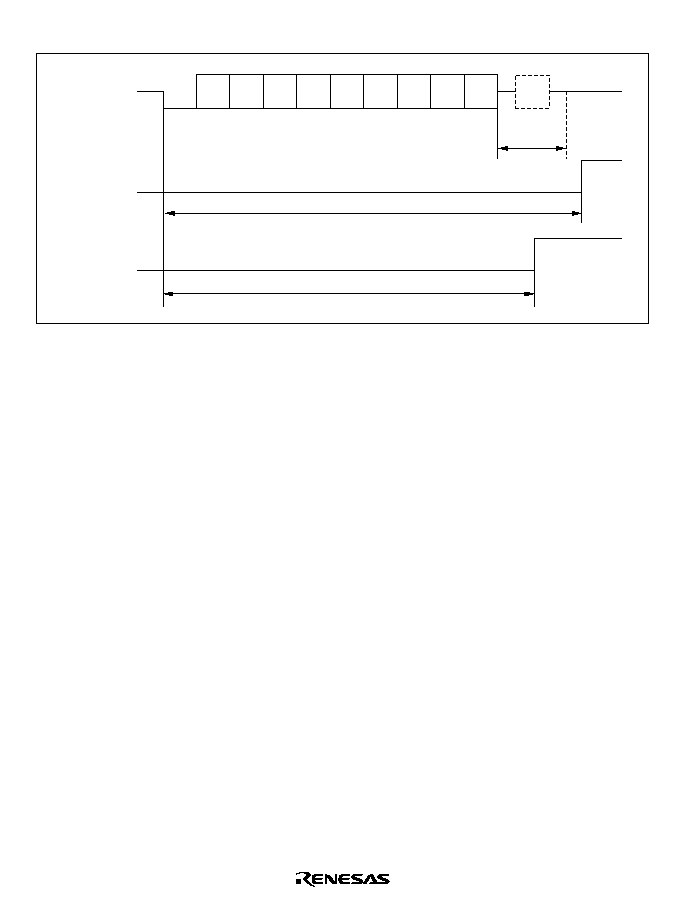
505
For details, see Interrupt Operations and Data Transfer by DMAC in this section.
Serial data
(1) GM = 0
TEND
(2) GM = 1
TEND
Ds
Dp
DE
Guard time
11.0 etu
12.5 etu
Figure 14.4 Timing of TEND Flag Setting
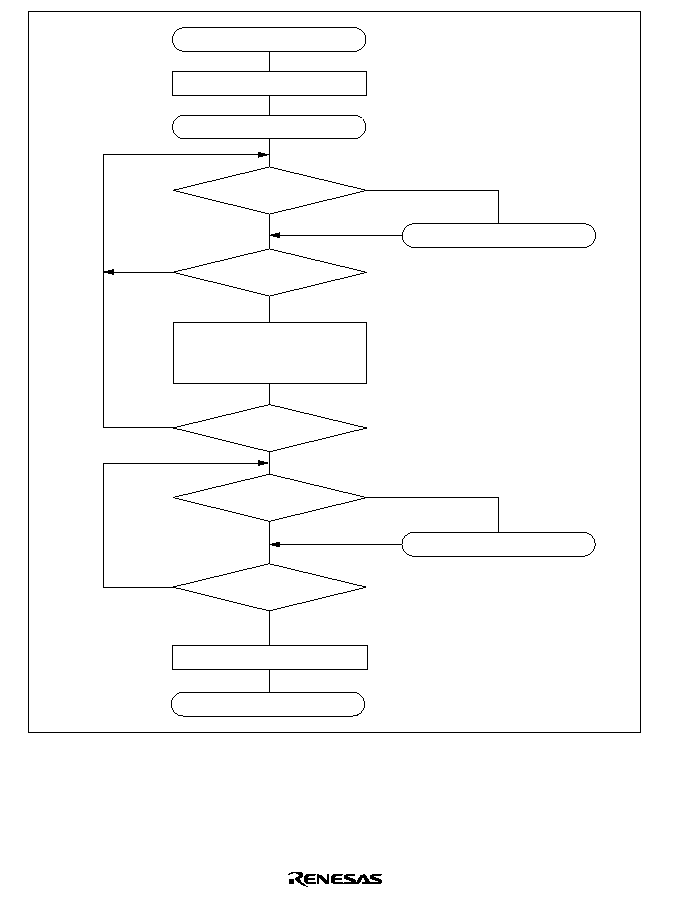
506
Initialization
No
Yes
Clear TE bit to 0
Start transmitting
Start
No
No
No
Yes
Yes
Yes
Yes
No
End
Write transmit data in TDR,
and clear TDRE flag
to 0 in SSR
Error handling
Error handling
TEND = 1?
All data transmitted?
TEND = 1?
FER/ERS = 0?
FER/ERS = 0?
Figure 14.5 Sample Transmission Processing Flowchart

507
1. Data write
TDR
TSR
(shift register)
Data 1
2. Transfer from TDR to TSR
Data 1
Data 1
Data remains in TDR
Data 1
3. Serial data output
Note: When the ERS flag is set, it should be cleared until transfer of the last bit (D7 in LSB-first
transmission, D0 in MSB-first transmission) of the retransmit data to be transmitted next has
been completed.
In case of normal transmission: TEND flag is set
In case of transmit error:
ERS flag is set
Steps 2 and 3 above are repeated until the
TEND flag is set.
I/O signal
output
Data 1
Figure 14.6 Relation Between Transmit Operation and Internal Registers
I/O data
When GM = 0
Guard time
DE
Ds
Da
Db
Dc
Dd
De
Df
Dg
Dh
Dp
12.5 etu
11.0 etu
When GM = 1
TXI (TEND
interrupt)
Figure 14.7 Timing of TEND Flag Setting
Receiving Serial Data: Data reception in smart card mode uses the same processing procedure as
for the normal SCI. Figure 14.8 shows a sample reception processing flowchart.
1. Perform smart card interface mode initialization as described in Initialization above.
2. Check that the ORER flag and PER flag are cleared to 0 in SSR. If either is set, perform the
appropriate receive error handling, then clear both the ORER and the PER flag to 0.
3. Repeat steps 2 and 3 until it can be confirmed that the RDRF flag is set to 1.
4. Read the receive data from RDR.
5. To continue receiving data, clear the RDRF flag to 0 and go back to step 2.
6. To end reception, clear the RE bit to 0.
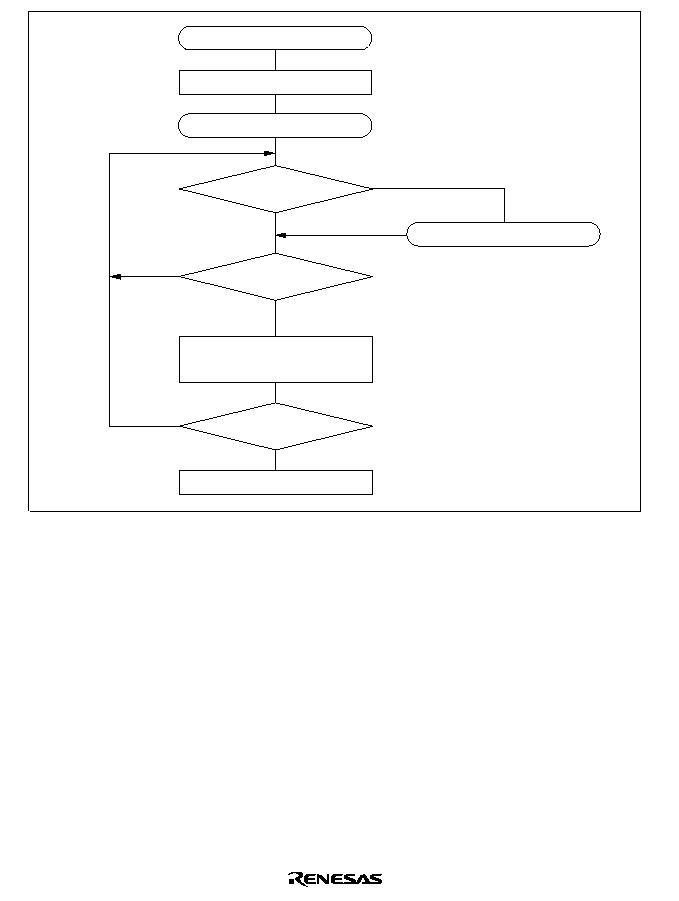
508
Initialization
Read RDR and clear
RDRF flag to 0 in SSR
Clear RE bit to 0
Start receiving
Start
Error handling
No
No
No
Yes
Yes
ORER = 0
and PER = 0?
RDRF = 1?
All data received?
Yes
Figure 14.8 Sample Reception Processing Flowchart
The above procedure may include interrupt handling and DMA transfer.
If reception ends and the RDRF flag is set to 1 while the RIE bit is set to 1 and interrupt requests
are enabled, a receive-data-full interrupt (RXI) will be requested. If an error occurs in reception
and either the ORER flag or the PER flag is set to 1, a transmit/receive-error interrupt (ERI) will
be requested.
If the RXI interrupt activates the DMAC, the number of bytes designated in the DMAC will be
transferred, skipping receive data in which an error occurred.
For details, see Interrupt Operations and Data Transfer by DMAC in this section.
If a parity error occurs during reception and the PER flag is set to 1, the received data is
transferred to RDR, so the erroneous data can be read.
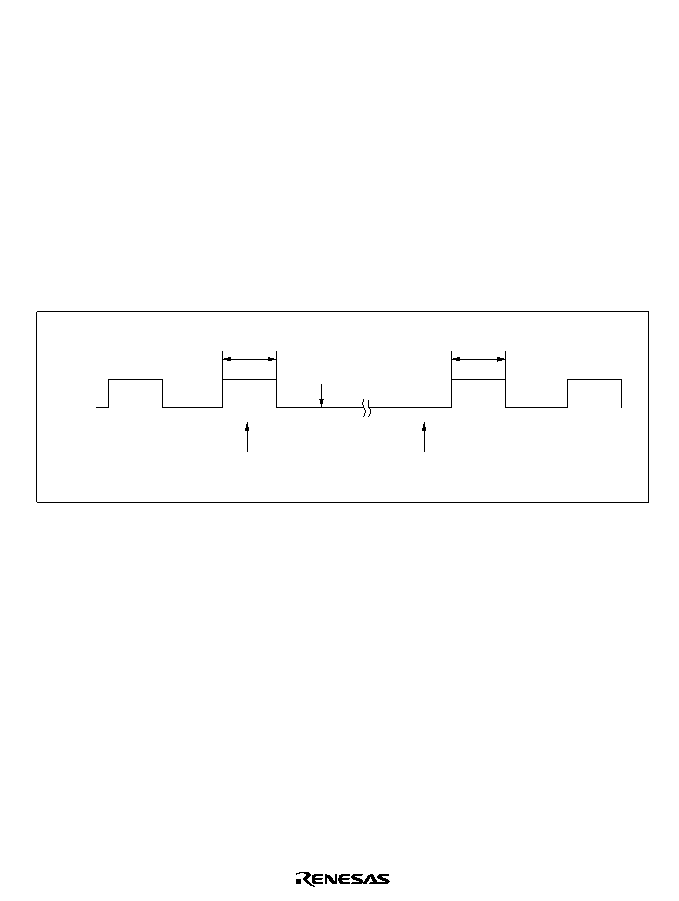
509
Switching Modes: When switching from receive mode to transmit mode, first confirm that the
receive operation has been completed, then start from initialization, clearing RE to 0 and setting
TE to 1. The RDRF, PER, or ORER flag can be used to check that the receive operation has been
completed.
When switching from transmit mode to receive mode, first confirm that the transmit operation has
been completed, then start from initialization, clearing TE to 0 and setting RE to 1. The TEND
flag can be used to check that the transmit operation has been completed.
Fixing Clock Output: When the GM bit is set to 1 in SMR, clock output can be fixed by means
of the CKE1 and CKE0 bits in SCR. The minimum clock pulse width can be set to the specified
width in this case.
Figure 14.9 shows the timing for fixing clock output. In this example, GM = 1, CKE1 = 0, and the
CKE0 bit is controlled.
Specified pulse
width
CKE1 value
SCK
Specified pulse
width
SCR write
(CKE0 = 1)
SCR write
(CKE0 = 0)
Figure 14.9 Timing for Fixing Cock Output
Interrupt Operations: The smart card interface has three interrupt sources: transmit-data-empty
(TXI), transmit/receive-error (ERI), and receive-data-full (RXI). The transmit-end interrupt
request (TEI) is not available in smart card mode.
A TXI interrupt is requested when the TEND flag is set to 1 in SSR. An RXI interrupt is requested
when the RDRF flag is set to 1 in SSR. An ERI interrupt is requested when the ORER, PER, or
ERS flag is set to 1 in SSR. These relationships are shown in table 14.8.

510
Table 14.8
Smart Card Interface Mode Operating States and Interrupt Sources
Operating State
Flag
Enable Bit
Interrupt
Source
DMAC
Activation
Transmit Mode
Normal
operation
TEND
TIE
TXI
Available
Error
ERS
RIE
ERI
Not available
Receive Mode
Normal
operation
RDRF
RIE
RXI
Available
Error
PER, ORER
RIE
ERI
Not available
Data Transfer by DMAC: The DMAC can be used to transmit and receive data in smart card
mode, as in normal SCI operations. In transmit mode, when the TEND flag is set to 1 in SSR, the
TDRE flag is set simultaneously, generating a TXI interrupt. If the TXI request is designated
beforehand as a DMAC activation source, the DMAC will be activated by the TXI request and
will transfer the next transmit data. This data transfer by the DMAC automatically clears the
TDRE and TEND flags to 0. In the event of an error, the SCI automatically retransmits the same
data, keeping the TEND flag cleared to 0 so that the DMAC is not activated. The SCI and DMAC
will therefore automatically transmit the designated number of bytes, including retransmission
when an error occurs. When an error occurs, the ERS flag is not cleared automatically, so the RIE
bit should be set to 1 to enable the error to generate an ERI request, and the ERI interrupt handler
should clear ERS.
When using the DMAC to transmit or receive, first set up and enable the DMAC, then make SCI
settings. DMAC settings are described in section 7, DMA controller.
In receive operations, an RXI interrupt is requested when the RDRF flag is set to 1 in SSR. If the
RXI request is designated beforehand as a DMAC activation source, the DMAC will be activated
by the RXI request and will transfer the received data. This data transfer by the DMAC
automatically clears the RDRF flag to 0. When an error occurs, the RDRF flag is not set and an
error flag is set instead. The DMAC is not activated. The ERI interrupt request is directed to the
CPU. The ERI interrupt handler should clear the error flags.
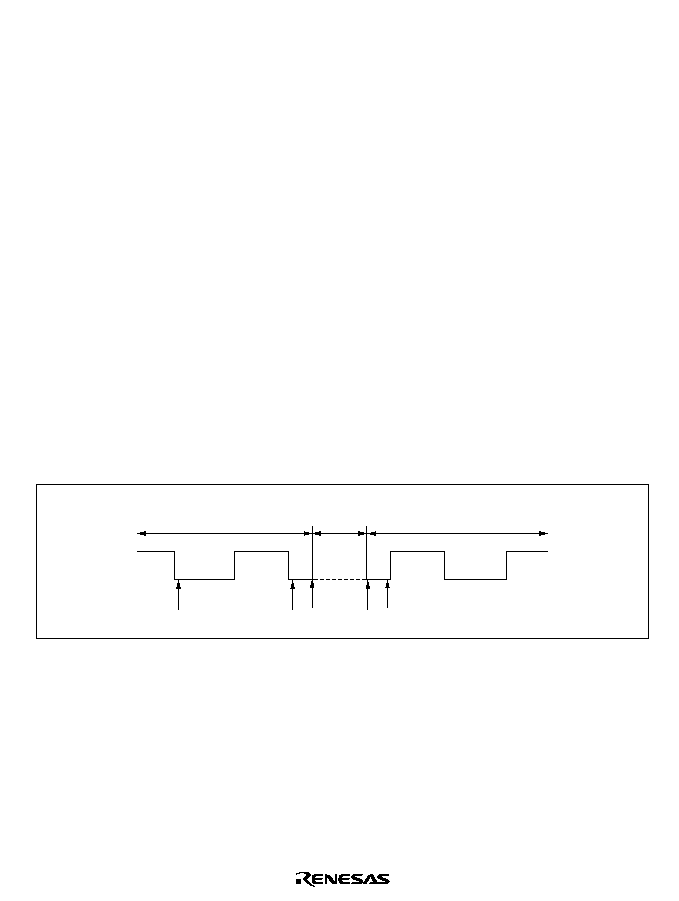
511
Examples of Operation in GSM Mode: When switching between smart card interface mode and
software standby mode, use the following procedures to maintain the clock duty cycle.
∑
Switching from smart card interface mode to software standby mode
1. Set the P9
4
data register (DR) and data direction register (DDR) to the values for the fixed
output state in software standby mode.
2. Write 0 in the TE and RE bits in the serial control register (SCR) to stop transmit/receive
operations. At the same time, set the CKE1 bit to the value for the fixed output state in
software standby mode.
3. Write 0 in the CKE0 bit in SCR to stop the clock.
4. Wait for one serial clock cycle. During this period, the duty cycle is preserved and clock output
is fixed at the specified level.
5. Write H'00 in the serial mode register (SMR) and smart card mode register (SCMR).
6. Make the transition to the software standby state.
∑
Returning from software standby mode to smart card interface mode
1
. Clear the software standby state.
2
. Set the CKE1 bit in SCR to the value for the fixed output state at the start of software standby
(the current P9
4
pin state).
3
. Set smart card interface mode and output the clock. Clock signal generation is started with the
normal duty cycle.
Software
standby
Normal operation
Normal operation
1 2 3
4 5 6
1
2
3
Figure 14.10 Procedure for Stopping and Restarting the Clock
Use the following procedure to secure the clock duty cycle after powering on.
1. The initial state is port input and high impedance. Use pull-up or pull-down resistors to fix the
potential.
2. Fix at the output specified by the CKE1 bit in SCR.
3. Set SMR and SCMR, and switch to smart card interface mode operation.
4. Set the CKE0 bit to 1 in SCR to start clock output.
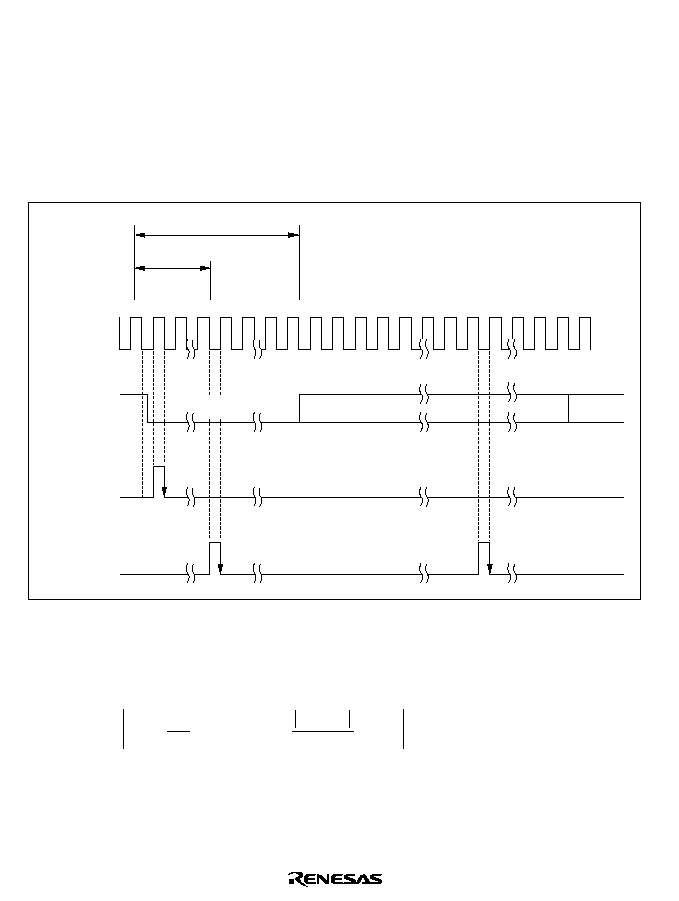
512
14.4
Usage Notes
The following points should be noted when using the SCI as a smart card interface.
Receive Data Sampling Timing and Receive Margin in Smart Card Interface Mode: In smart
card interface mode, the SCI operates on a base clock with a frequency of 372 times the transfer
rate. In reception, the SCI synchronizes internally with the fall of the start bit, which it samples on
the base clock. Receive data is latched at the rising edge of the 186th base clock pulse. The timing
is shown in figure 14.11.
Internal base
clock
372 clocks
186 clocks
Receive data
(RxD)
Synchronization
sampling timing
D0
D1
Data sampling
timing
185
371 0
371
185
0
0
Start bit
Figure 14.11 Receive Data Sampling Timing in Smart Card Interface Mode
The receive margin can therefore be expressed as follows.
Receive margin in smart card interface mode:
M = (0.5 ≠
1
2N
D ≠ 0.5
N
) ≠ (L ≠ 0.5) F ≠
(1 + F)
◊
100%
M: Receive margin (%)
N: Ratio of clock frequency to bit rate (N = 372)
D: Clock duty cycle (L = 0 to 1.0)
L: Frame length (L =10)
F: Absolute deviation of clock frequency

513
From the above equation, if F = 0 and D = 0.5, the receive margin is as follows.
When D = 0.5 and F = 0:
M = (0.5 ≠ 1/2
◊
372)
◊
100%
= 49.866%
Retransmission: Retransmission is performed by the SCI in receive mode and transmit mode as
described below.
∑
Retransmission when SCI is in Receive Mode
Figure 14.12 illustrates retransmission when the SCI is in receive mode.
1. If an error is found when the received parity bit is checked, the PER bit is automatically set to
1. If the RIE bit in SCR is set to the enable state, an ERI interrupt is requested. The PER bit
should be cleared to 0 in SSR before the next parity bit sampling timing.
2. The RDRF bit in SSR is not set for the frame in which the error has occurred.
3. If no error is found when the received parity bit is checked, the PER bit is not set to 1 in SSR.
4. If no error is found when the received parity bit is checked, the receive operation is assumed to
have been completed normally, and the RDRF bit is automatically set to 1 in SSR. If the RIE
bit in SCR is set to the enable state, an RXI interrupt is requested. If RXI is enabled as a DMA
transfer activation source, the RDR contents can be read automatically. When the DMAC reads
the RDR data, the RDRF flag is automatically cleared to 0.
5. When a normal frame is received, the data pin is held in the high-impedance state at the error
signal transmission timing.
D0 D1 D2 D3 D4 D5 D6 D7 Dp
DE
Ds D0 D1 D2 D3 D4 D5 D6 D7 Dp
(DE)
Ds D0 D1 D2 D3 D4
Ds
Frame n+1
Retransmitted frame
Frame n
RDRF
[1]
PER
[2]
[3]
[4]
Figure 14.12 Retransmission in SCI Receive Mode
∑
Retransmission when SCI is in Transmit Mode
Figure 14.13 illustrates retransmission when the SCI is in transmit mode.
6. If an error signal is sent back from the receiving device after transmission of one frame is
completed, the ERS bit is set to 1 in SSR. If the RIE bit in SCR is set to the enable state, an
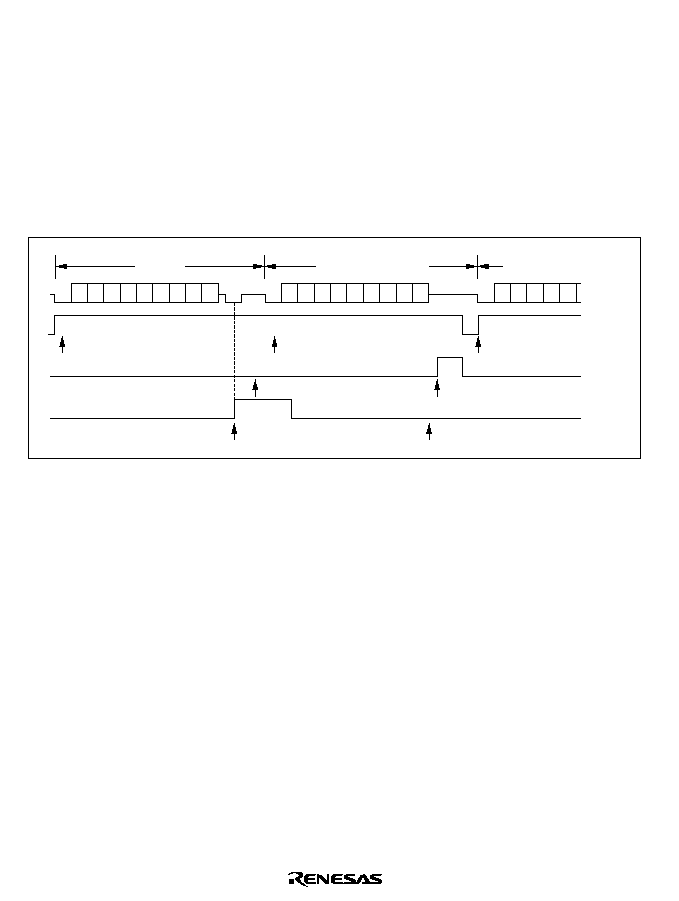
514
ERI interrupt is requested. The ERS bit should be cleared to 0 in SSR before the next parity bit
sampling timing.
7. The TEND bit in SSR is not set for the frame for which the error signal was received.
8. If an error signal is not sent back from the receiving device, the ERS flag is not set in SSR.
9. If an error signal is not sent back from the receiving device, transmission of one frame,
including retransmission, is assumed to have been completed, and the TEND bit is set to 1 in
SSR. If the TIE bit in SCR is set to the enable state, a TXI interrupt is requested. If TXI is
enabled as a DMA transfer activation source, the next data can be written in TDR
automatically. When the DMAC writes data in TDR, the TDRE bit is automatically cleared to
0.
D0 D1 D2 D3 D4 D5 D6 D7 Dp DE
Ds D0 D1 D2 D3 D4 D5 D6 D7 Dp
(DE)
Ds D0 D1 D2 D3 D4
Ds
Frame n+1
Retransmitted frame
Frame n
TDRE
TEND
[6]
ERS
Transfer from TDR to TSR
Transfer from TDR to TSR
Transfer from TDR to TSR
[7]
[9]
[8]
Figure 14.13 Retransmission in SCI Transmit Mode

515
Section 15 A/D Converter
15.1
Overview
The H8/3006 and H8/3007 includes a 10-bit successive-approximations A/D converter with a
selection of up to eight analog input channels.
When the A/D converter is not used, it can be halted independently to conserve power. For details
see section 19.6, Module Standby Function.
15.1.1
Features
A/D converter features are listed below.
∑
10-bit resolution
∑
Eight input channels
∑
Selectable analog conversion voltage range
The analog voltage conversion range can be programmed by input of an analog reference
voltage at the V
REF
pin.
∑
High-speed conversion
Conversion time: maximum 3.5 µs per channel (with 20 MHz system clock)
∑
Two conversion modes
Single mode: A/D conversion of one channel
Scan mode: continuous conversion on one to four channels
∑
Four 16-bit data registers
A/D conversion results are transferred for storage into data registers corresponding to the
channels.
∑
Sample-and-hold function
∑
Three conversion start sources
The A/D converter can be activated by software, an external trigger, or an 8-bit timer compare
match.
∑
A/D interrupt requested at end of conversion
At the end of A/D conversion, an A/D end interrupt (ADI) can be requested.
∑
DMA controller (DMAC) activation
The DMAC can be activated at the end of A/D conversion.
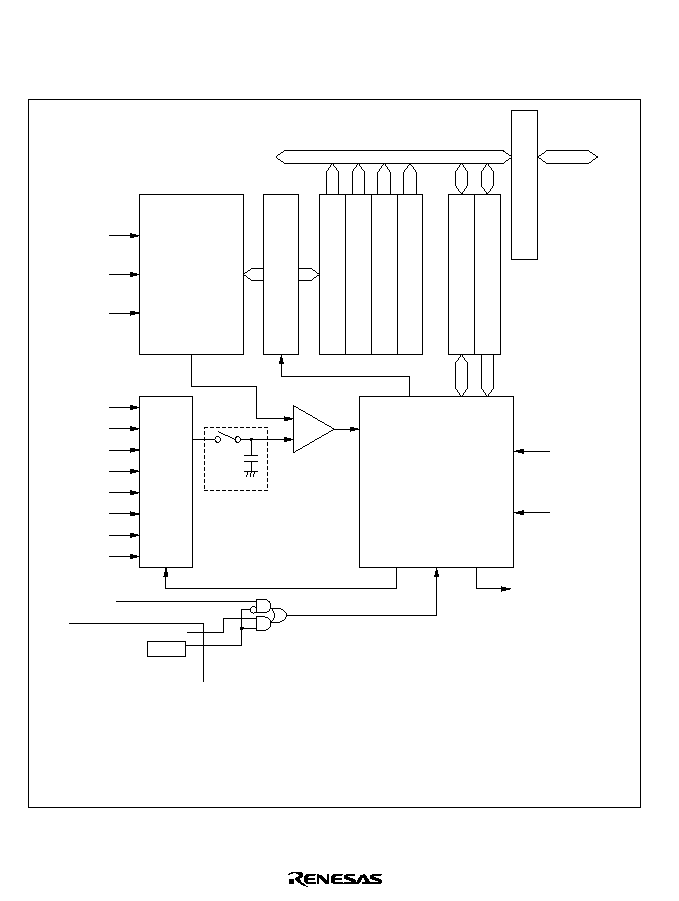
516
15.1.2
Block Diagram
Figure 15.1 shows a block diagram of the A/D converter.
Module data bus
Bus interf
ace
On-chip
data bus
ADDRA
ADDRB
ADDRC
ADDRD
ADCSR
ADCR
Successiv
e-
appro
ximations register
10-bit D/A
Analog
multi-
plexer
Sample-and-
hold circuit
Comparator
+
≠
Control circuit
¯/4
¯/8
ADI
interrupt signal
AV
V
AV
CC
REF
SS
AN
AN
AN
AN
AN
AN
AN
AN
0
1
2
3
4
5
6
7
Legend
ADCR:
ADCSR:
ADDRA:
ADDRB:
ADDRC:
ADDRD:
A/D control register
A/D control/status register
A/D data register A
A/D data register B
A/D data register C
A/D data register D
ADTRG
ADTE
Compare match A0
8TCSR0
8-bit timer
Figure 15.1 A/D Converter Block Diagram
517
15.1.3
Pin Configuration
Table 15.1 summarizes the A/D converter's input pins. The eight analog input pins are divided
into two groups: group 0 (AN
0
to AN
3
), and group 1 (AN
4
to AN
7
). AV
CC
and AV
SS
are the power
supply for the analog circuits in the A/D converter. V
REF
is the A/D conversion reference voltage.
Table 15.1
A/D Converter Pins
Pin Name
Abbrevi-
ation
I/O
Function
Analog power supply pin
AV
CC
Input
Analog power supply
Analog ground pin
AV
SS
Input
Analog ground and reference voltage
Reference voltage pin
V
REF
Input
Analog reference voltage
Analog input pin 0
AN
0
Input
Group 0 analog inputs
Analog input pin 1
AN
1
Input
Analog input pin 2
AN
2
Input
Analog input pin 3
AN
3
Input
Analog input pin 4
AN
4
Input
Group 1 analog inputs
Analog input pin 5
AN
5
Input
Analog input pin 6
AN
6
Input
Analog input pin 7
AN
7
Input
A/D external trigger input pin
ADTRG
Input
External trigger input for starting A/D conversion
518
15.1.4
Register Configuration
Table 15.2 summarizes the A/D converter's registers.
Table 15.2
A/D Converter Registers
Address*
1
Name
Abbreviation
R/W
Initial Value
H'FFFE0
A/D data register AH
ADDRAH
R
H'00
H'FFFE1
A/D data register AL
ADDRAL
R
H'00
H'FFFE2
A/D data register BH
ADDRBH
R
H'00
H'FFFE3
A/D data register BL
ADDRBL
R
H'00
H'FFFE4
A/D data register CH
ADDRCH
R
H'00
H'FFFE5
A/D data register CL
ADDRCL
R
H'00
H'FFFE6
A/D data register DH
ADDRDH
R
H'00
H'FFFE7
A/D data register DL
ADDRDL
R
H'00
H'FFFE8
A/D control/status register
ADCSR
R/(W)*
2
H'00
H'FFFE9
A/D control register
ADCR
R/W
H'7E
Notes: 1. Lower 20 bits of the address in advanced mode.
2. Only 0 can be written in bit 7, to clear the flag.
519
15.2
Register Descriptions
15.2.1
A/D Data Registers A to D (ADDRA to ADDRD)
Bit
ADDRn
Initial value
14
AD8
0
R
12
AD6
0
R
10
AD4
0
R
8
AD2
0
R
6
AD0
0
R
0
--
0
R
4
--
0
R
2
--
0
R
15
AD9
0
R
13
AD7
0
R
11
AD5
0
R
9
AD3
0
R
7
AD1
0
R
1
--
0
R
5
--
0
R
3
--
0
R
A/D conversion data
10-bit data giving an
A/D conversion result
Reserved bits
Read/Write
(n = A to D)
The four A/D data registers (ADDRA to ADDRD) are 16-bit read-only registers that store the
results of A/D conversion.
An A/D conversion produces 10-bit data, which is transferred for storage into the A/D data
register corresponding to the selected channel. The upper 8 bits of the result are stored in the upper
byte of the A/D data register. The lower 2 bits are stored in the lower byte. Bits 5 to 0 of an A/D
data register are reserved bits that are always read as 0. Table 15.3 indicates the pairings of analog
input channels and A/D data registers.
The CPU can always read and write the A/D data registers. The upper byte can be read directly,
but the lower byte is read through a temporary register (TEMP). For details see section 15.3, CPU
Interface.
The A/D data registers are initialized to H'0000 by a reset and in standby mode.
Table 15.3
Analog Input Channels and A/D Data Registers
Analog Input Channel
Group 0
Group 1
A/D Data Register
AN
0
AN
4
ADDRA
AN
1
AN
5
ADDRB
AN
2
AN
6
ADDRC
AN
3
AN
7
ADDRD

520
15.2.2
A/D Control/Status Register (ADCSR)
Bit
Initial value
Read/Write
7
ADF
0
R/(W)
6
ADIE
0
R/W
5
ADST
0
R/W
4
SCAN
0
R/W
3
CKS
0
R/W
0
CH0
0
R/W
2
CH2
0
R/W
1
CH1
0
R/W
*
Note: Only 0 can be written, to clear the flag.
*
A/D end flag
Indicates end of A/D conversion
A/D interrupt enable
Enables and disables A/D end interrupts
A/D start
Starts or stops A/D conversion
Scan mode
Selects single mode or scan mode
Clock select
Selects the A/D conversion time
Channel select 2 to 0
These bits select analog
input channels
ADCSR is an 8-bit readable/writable register that selects the mode and controls the A/D converter.
ADCSR is initialized to H'00 by a reset and in standby mode.

521
Bit 7--A/D End Flag (ADF): Indicates the end of A/D conversion.
Bit 7
ADF
Description
0
[Clearing condition]
∑
Read ADF when ADF =1, then write 0 in ADF.
∑
DMAC activated by ADI interrupt.
(Initial value)
1
[Setting conditions]
∑
Single mode: A/D conversion ends
∑
Scan mode: A/D conversion ends in all selected channels
Bit 6--A/D Interrupt Enable (ADIE): Enables or disables the interrupt (ADI) requested at the
end of A/D conversion.
Bit 6
ADIE
Description
0
A/D end interrupt request (ADI) is disabled
(Initial value)
1
A/D end interrupt request (ADI) is enabled
Bit 5--A/D Start (ADST): Starts or stops A/D conversion. The ADST bit remains set to 1 during
A/D conversion. It can also be set to 1 by external trigger input at the
ADTRG pin, or by an 8-bit
timer compare match.
Bit 5
ADST
Description
0
A/D conversion is stopped
(Initial value)
1
Single mode: A/D conversion starts; ADST is automatically cleared to 0 when
conversion ends.
Scan mode: A/D conversion starts and continues, cycling among the selected
channels, until ADST is cleared to 0 by software, by a reset, or by a transition to
standby mode.
522
Bit 4--Scan Mode (SCAN): Selects single mode or scan mode. For further information on
operation in these modes, see section 15.4, Operation. Clear the ADST bit to 0 before switching
the conversion mode.
Bit 4
SCAN
Description
0
Single mode
(Initial value)
1
Scan mode
Bit 3--Clock Select (CKS): Selects the A/D conversion time. Clear the ADST bit to 0 before
switching the conversion time.
Bit 3
CKS
Description
0
Conversion time = 134 states (maximum)
(Initial value)
1
Conversion time = 70 states (maximum)
Bits 2 to 0--Channel Select 2 to 0 (CH2 to CH0): These bits and the SCAN bit select the analog
input channels. Clear the ADST bit to 0 before changing the channel selection.
Group
Selection
Channel Selection
Description
CH2
CH1
CH0
Single Mode
Scan Mode
0
0
0
AN
0
(Initial value)
AN
0
1
AN
1
AN
0
, AN
1
1
0
AN
2
AN
0
to AN
2
1
AN
3
AN
0
to AN
3
1
0
0
AN
4
AN
4
1
AN
5
AN
4
, AN
5
1
0
AN
6
AN
4
to AN
6
1
AN
7
AN
4
to AN
7

523
15.2.3
A/D Control Register (ADCR)
Bit
Initial value
Read/Write
7
TRGE
0
R/W
6
--
1
--
5
--
1
--
4
--
1
--
3
--
1
--
0
--
0
R/W
2
--
1
--
1
--
1
--
Trigger enable
Enables or disables starting of A/D conversion
by an external trigger or 8-bit timer compare match
Reserved bits
ADCR is an 8-bit readable/writable register that enables or disables starting of A/D conversion by
external trigger input or an 8-bit timer compare match signal. ADCR is initialized to H'7E by a
reset and in standby mode.
Bit 7--Trigger Enable (TRGE): Enables or disables starting of A/D conversion by an external
trigger or 8-bit timer compare match.
Bit 7
TRGE
Description
0
Starting of A/D conversion by an external trigger or 8-bit timer
compare match is disabled
(Initial value)
1
A/D conversion is started at the falling edge of the external trigger
signal (
ADTRG
) or by an 8-bit timer compare match
External trigger pin and 8-bit timer selection are performed by the 8-bit timer. For details, see
section 10, 8-Bit Timers.
Bits 6 to 1--Reserved: These bits cannot be modified and are always read as 1.
Bit 0--Reserved:
This bit can be read or written, but should not be set to 1.
524
15.3
CPU Interface
ADDRA to ADDRD are 16-bit registers, but they are connected to the CPU by an 8-bit data bus.
Therefore, although the upper byte can be be accessed directly by the CPU, the lower byte is read
through an 8-bit temporary register (TEMP).
An A/D data register is read as follows. When the upper byte is read, the upper-byte value is
transferred directly to the CPU and the lower-byte value is transferred into TEMP. Next, when the
lower byte is read, the TEMP contents are transferred to the CPU.
When reading an A/D data register, always read the upper byte before the lower byte. It is possible
to read only the upper byte, but if only the lower byte is read, incorrect data may be obtained.
Figure 15.2 shows the data flow for access to an A/D data register.
Upper-byte read
Bus interface
Module data bus
CPU
(H'AA)
ADDRnH
(H'AA)
ADDRnL
(H'40)
Lower-byte read
Bus interface
Module data bus
CPU
(H'40)
ADDRnH
(H'AA)
ADDRnL
(H'40)
TEMP
(H'40)
TEMP
(H'40)
(n = A to D)
(n = A to D)
Figure 15.2 A/D Data Register Access Operation (Reading H'AA40)

525
15.4
Operation
The A/D converter operates by successive approximations with 10-bit resolution. It has two
operating modes: single mode and scan mode.
15.4.1
Single Mode (SCAN = 0)
Single mode should be selected when only one A/D conversion on one channel is required. A/D
conversion starts when the ADST bit is set to 1 by software, or by external trigger input. The
ADST bit remains set to 1 during A/D conversion and is automatically cleared to 0 when
conversion ends.
When conversion ends the ADF bit is set to 1. If the ADIE bit is also set to 1, an ADI interrupt is
requested at this time. To clear the ADF flag to 0, first read ADCSR, then write 0 in ADF.
When the mode or analog input channel must be switched during analog conversion, to prevent
incorrect operation, first clear the ADST bit to 0 in ADCSR to halt A/D conversion. After making
the necessary changes, set the ADST bit to 1 to start A/D conversion again. The ADST bit can be
set at the same time as the mode or channel is changed.
Typical operations when channel 1 (AN
1
) is selected in single mode are described next.
Figure 15.3 shows a timing diagram for this example.
1. Single mode is selected (SCAN = 0), input channel AN
1
is selected (CH2 = CH1 = 0,
CH0 = 1), the A/D interrupt is enabled (ADIE = 1), and A/D conversion is started
(ADST = 1).
2. When A/D conversion is completed, the result is transferred into ADDRB. At the same time
the ADF flag is set to 1, the ADST bit is cleared to 0, and the A/D converter becomes idle.
3. Since ADF = 1 and ADIE = 1, an ADI interrupt is requested.
4. The A/D interrupt handling routine starts.
5. The routine reads ADCSR, then writes 0 in the ADF flag.
6. The routine reads and processes the conversion result (ADDRB).
7. Execution of the A/D interrupt handling routine ends. After that, if the ADST bit is set to 1,
A/D conversion starts again and steps 2 to 7 are repeated.
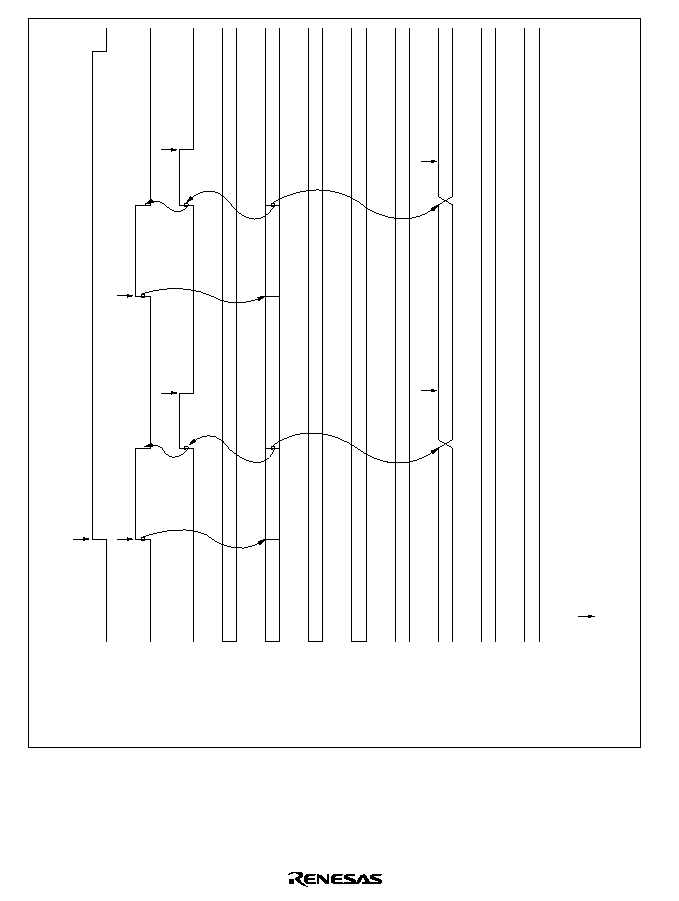
526
ADIE
ADST
ADF
State of channel 0
(AN )
Set
Set
Set
Clear
Clear
Idle
Idle
Idle
Idle
A/D conversion (1)
A/D conversion (2)
Idle
Read conversion result
A/D conversion result (1)
Read conversion result
A/D conversion result (2)
Note: Vertical arrows ( ) indicate instructions executed by software.
0
1
2
3
A/D conversion
starts
*
*
*
*
*
*
ADDRA
ADDRB
ADDRC
ADDRD
State of channel 1
(AN )
State of channel 2
(AN )
State of channel 3
(AN )
Idle
Figure 15.3 Example of A/D Converter Operation (Single Mode, Channel 1 Selected)

527
15.4.2
Scan Mode (SCAN = 1)
Scan mode is useful for monitoring analog inputs in a group of one or more channels. When the
ADST bit is set to 1 by software or external trigger input, A/D conversion starts on the first
channel in the group (AN
0
when CH2 = 0, AN
4
when CH2 = 1). When two or more channels are
selected, after conversion of the first channel ends, conversion of the second channel (AN
1
or
AN
5
) starts immediately. A/D conversion continues cyclically on the selected channels until the
ADST bit is cleared to 0. The conversion results are transferred for storage into the A/D data
registers corresponding to the channels.
When the mode or analog input channel selection must be changed during analog conversion, to
prevent incorrect operation, first clear the ADST bit to 0 in ADCSR to halt A/D conversion. After
making the necessary changes, set the ADST bit to 1. A/D conversion will start again from the
first channel in the group. The ADST bit can be set at the same time as the mode or channel
selection is changed.
Typical operations when three channels in group 0 (AN
0
to AN
2
) are selected in scan mode are
described next. Figure 15.4 shows a timing diagram for this example.
1. Scan mode is selected (SCAN = 1), scan group 0 is selected (CH2 = 0), analog input channels
AN
0
to AN
2
are selected (CH1 = 1, CH0 = 0), and A/D conversion is started (ADST = 1).
2. When A/D conversion of the first channel (AN
0
) is completed, the result is transferred into
ADDRA. Next, conversion of the second channel (AN
1
) starts automatically.
3. Conversion proceeds in the same way through the third channel (AN
2
).
4. When conversion of all selected channels (AN
0
to AN
2
) is completed, the ADF flag is set to 1
and conversion of the first channel (AN
0
) starts again. If the ADIE bit is set to 1, an ADI
interrupt is requested at this time.
5. Steps 2 to 4 are repeated as long as the ADST bit remains set to 1. When the ADST bit is
cleared to 0, A/D conversion stops. After that, if the ADST bit is set to 1, A/D conversion
starts again from the first channel (AN
0
).
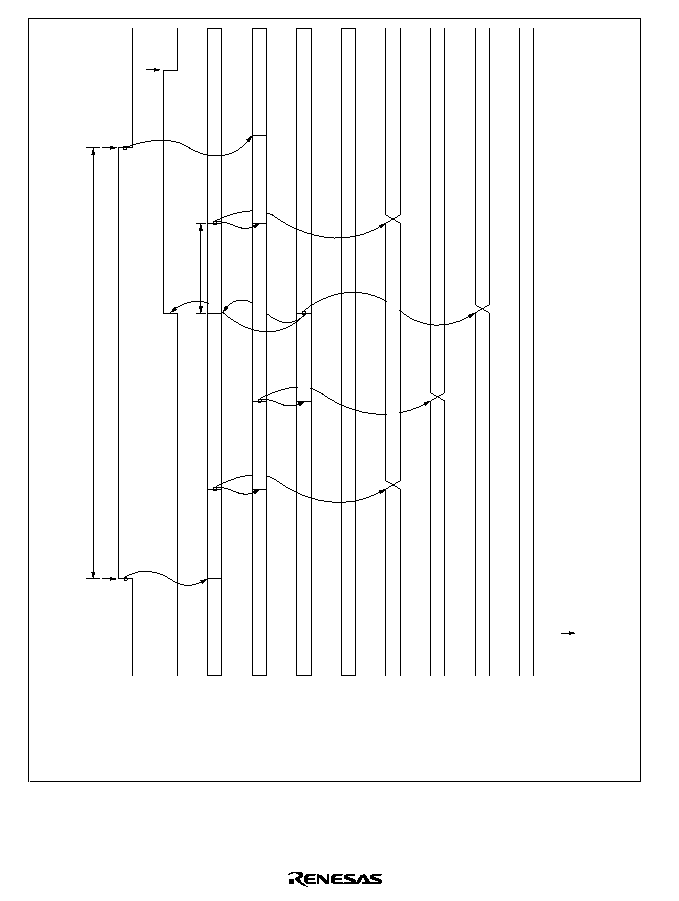
528
ADST
ADF
State of channel 0
(AN )
0
1
2
3
Continuous A/D conversion
Set
Clear
*1
Clear
*
1
Idle
A/D conversion (1)
Idle
Idle
Idle
A/D conversion (4)
Idle
A/D conversion (2)
Idle
A/D conversion (5)
Idle
A/D conversion (3)
Idle
Idle
Transfer
A/D conversion result (1)
A/D conversion result (4)
A/D conversion result (2)
A/D conversion result (3)
1.
2.
A/D conversion time
Notes:
*2
*1
ADDRA
ADDRB
ADDRC
ADDRD
State of channel 1
(AN )
State of channel 2
(AN )
State of channel 3
(AN )
Vertical arrows ( ) indicate instructions executed by software.
Data currently being converted is ignored.
Figure 15.4 Example of A/D Converter Operation (Scan Mode,
Channels 3 AN
0
to AN
2
Selected)
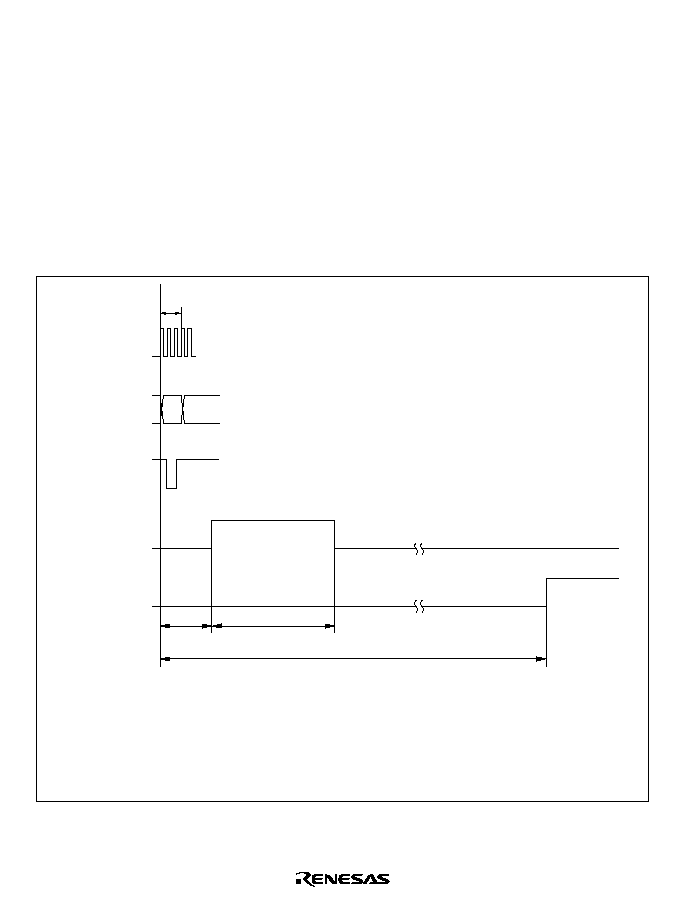
529
15.4.3
Input Sampling and A/D Conversion Time
The A/D converter has a built-in sample-and-hold circuit. The A/D converter samples the analog
input at a time t
D
after the ADST bit is set to 1, then starts conversion. Figure 15.5 shows the A/D
conversion timing. Table 15.4 indicates the A/D conversion time.
As indicated in figure 15.5, the A/D conversion time includes t
D
and the input sampling time. The
length of t
D
varies depending on the timing of the write access to ADCSR. The total conversion
time therefore varies within the ranges indicated in table 15.4.
In scan mode, the values given in table 15.4 apply to the first conversion. In the second and
subsequent conversions the conversion time is fixed at 128 states when CKS = 0 or 66 states when
CKS = 1.
Address bus
Write signal
Input sampling
timing
ADF
(1)
(2)
t
D
t
SPL
t
CONV
Legend
(1):
(2):
t :
t :
t :
D
SPL
CONV
ADCSR write cycle
ADCSR address
Synchronization delay
Input sampling time
A/D conversion time
Figure 15.5 A/D Conversion Timing

530
Table 15.4
A/D Conversion Time (Single Mode)
CKS = 0
CKS = 1
Symbol
Min
Typ
Max
Min
Typ
Max
Synchronization delay
t
D
6
--
9
4
--
5
Input sampling time
t
SPL
--
31
--
--
15
--
A/D conversion time
t
CONV
131
--
134
69
--
70
Note:
Values in the table are numbers of states.
15.4.4
External Trigger Input Timing
A/D conversion can be externally triggered. When the TRGE bit is set to 1 in ADCR and the 8-bit
timer's ADTE bit is cleared to 0, external trigger input is enabled at the
ADTRG pin. A falling
edge at the
ADTRG pin sets the ADST bit to 1 in ADCSR, starting A/D conversion. Other
operations, in both single and scan modes, are the same as if the ADST bit had been set to 1 by
software. Figure 15.6 shows the timing.
ADTRG
Internal trigger
signal
ADST
A/D conversion
Figure 15.6 External Trigger Input Timing

531
15.5
Interrupts
The A/D converter generates an interrupt (ADI) at the end of A/D conversion. The ADI interrupt
request can be enabled or disabled by the ADIE bit in ADCSR. The ADI interrupt request can be
designated as a DMAC activation source. In this case, an interrupt request is not sent to the CPU.
15.6
Usage Notes
When using the A/D converter, note the following points:
1. Analog Input Voltage Range: During A/D conversion, the voltages input to the analog input
pins should be in the range AV
SS
AN
n
V
REF
.
2. Relationships of AV
CC
and AV
SS
to V
CC
and V
SS
: AV
CC
, AV
SS
, V
CC
, and V
SS
should be related
as follows: AV
SS
= V
SS
. AV
CC
and AV
SS
must not be left open, even if the A/D converter is not
used.
3. V
REF
Programming Range: The reference voltage input at the V
REF
pin should be in the range
V
REF
AV
CC
.
4. Note on Board Design: In board layout, separate the digital circuits from the analog circuits as
much as possible. Particularly avoid layouts in which the signal lines of digital circuits cross or
closely approach the signal lines of analog circuits. Induction and other effects may cause the
analog circuits to operate incorrectly, or may adversely affect the accuracy of A/D conversion.
The analog input signals (AN
0
to AN
7
), analog reference voltage (V
REF
), and analog supply
voltage (AV
CC
) must be separated from digital circuits by the analog ground (AV
SS
). The
analog ground (AV
SS
) should be connected to a stable digital ground (V
SS
) at one point on the
board.
5. Note on Noise: To prevent damage from surges and other abnormal voltages at the analog
input pins (AN
0
to AN
7
) and analog reference voltage pin (V
REF
), connect a protection circuit
like the one in figure 15.7 between AV
CC
and AV
SS
. The bypass capacitors connected to AV
CC
and V
REF
and the filter capacitors connected to AN
0
to AN
7
must be connected to AV
SS
. If filter
capacitors like the ones in figure 15.7 are connected, the voltage values input to the analog
input pins (AN
0
to AN
7
) will be smoothed, which may give rise to error. Error can also occur if
A/D conversion is frequently performed in scan mode so that the current that charges and
discharges the capacitor in the sample-and-hold circuit of the A/D converter becomes greater
than that input to the analog input pins via input impedance R
in
. The circuit constants should
therefore be selected carefully.
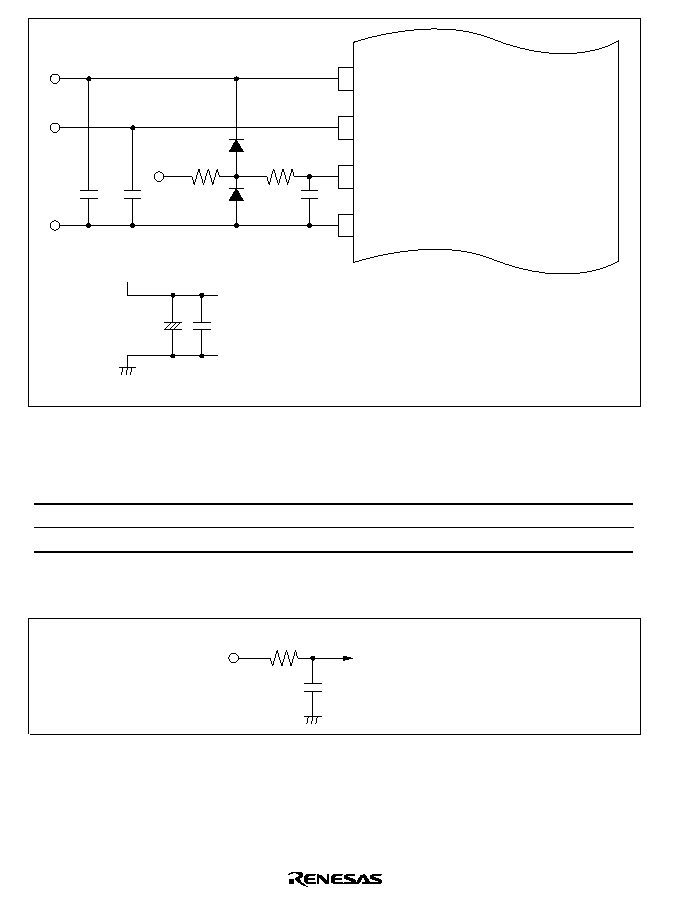
532
AV
CC
* 1
* 1
V
REF
AN
0
to AN
7
AV
SS
Notes:
*
1.
*
2. Rin: input impedance
Rin
* 2
100
0.1
µ
F
0.01
µ
F
10
µ
F
Figure 15.7 Example of Analog Input Protection Circuit
Table 15.5
Analog Input Pin Ratings
Item
min
max
Unit
Analog input capacitance
--
20
pF
Allowable signal-source impedance
--
10*
k
Note: * When conversion time 134 states, V
CC
= 4.0 V to 5.5 V and
13 MHz. For details see
section 20, Electrical Characteristics.
20 pF
To A/D converter
AN
0
to AN
7
10 k
Figure 15.8 Analog Input Pin Equivalent Circuit
Note:
Numeric values are approximate, except in table 15.5

533
6. A/D Conversion Accuracy Definitions: A/D conversion accuracy in the H8/3006 and H8/3007
are defined as follows:
∑
Resolution:....................Digital output code length of A/D converter
∑
Offset error: ..................Deviation from ideal A/D conversion characteristic of analog input
voltage required to raise digital output from minimum voltage value
0000000000 to 0000000001 (figure 15.10)
∑
Full-scale error:.............Deviation from ideal A/D conversion characteristic of analog input
voltage required to raise digital output from 1111111110 to
1111111111 (figure 15.10)
∑
Quantization error:........Intrinsic error of the A/D converter; 1/2 LSB (figure 15.9)
∑
Nonlinearity error: ........Deviation from ideal A/D conversion characteristic in range from zero
volts to full scale, exclusive of offset error, full-scale error, and
quantization error.
∑
Absolute accuracy:........Deviation of digital value from analog input value, including offset
error, full-scale error, quantization error, and nonlinearity error.
111
110
101
100
011
010
001
000
1/8 2/8 3/8 4/8 5/8 6/8 7/8 FS
Quantization error
Analog input
voltage
Digital
output
Ideal A/D conversion
characteristic
Figure 15.9 A/D Converter Accuracy Definitions (1)

534
FS
Offset error
Nonlinearity
error
Actual A/D conversion
characteristic
Analog input
voltage
Digital
output
Ideal A/D
conversion
characteristic
Full-scale
error
Figure 15.10 A/D Converter Accuracy Definitions (2)
7. Allowable Signal-Source Impedance: The analog inputs of the H8/3006 and H8/3007 are
designed to assure accurate conversion of input signals with a signal-source impedance not
exceeding 10 k
. The reason for this rating is that it enables the input capacitor in the sample-
and-hold circuit in the A/D converter to charge within the sampling time. If the sensor output
impedance exceeds 10 k
, charging may be inadequate and the accuracy of A/D conversion
cannot be guaranteed.
If a large external capacitor is provided in single mode, then the internal 10-k
input resistance
becomes the only significant load on the input. In this case the impedance of the signal source
is not a problem.
A large external capacitor, however, acts as a low-pass filter. This may make it impossible to
track analog signals with high dv/dt (e.g. a variation of 5 mV/µs) (figure 15.11). To convert
high-speed analog signals or to use scan mode, insert a low-impedance buffer.
8. Effect on Absolute Accuracy: Attaching an external capacitor creates a coupling with ground,
so if there is noise on the ground line, it may degrade absolute accuracy. The capacitor must be
connected to an electrically stable ground, such as AV
SS
.
If a filter circuit is used, be careful of interference with digital signals on the same board, and
make sure the circuit does not act as an antenna.
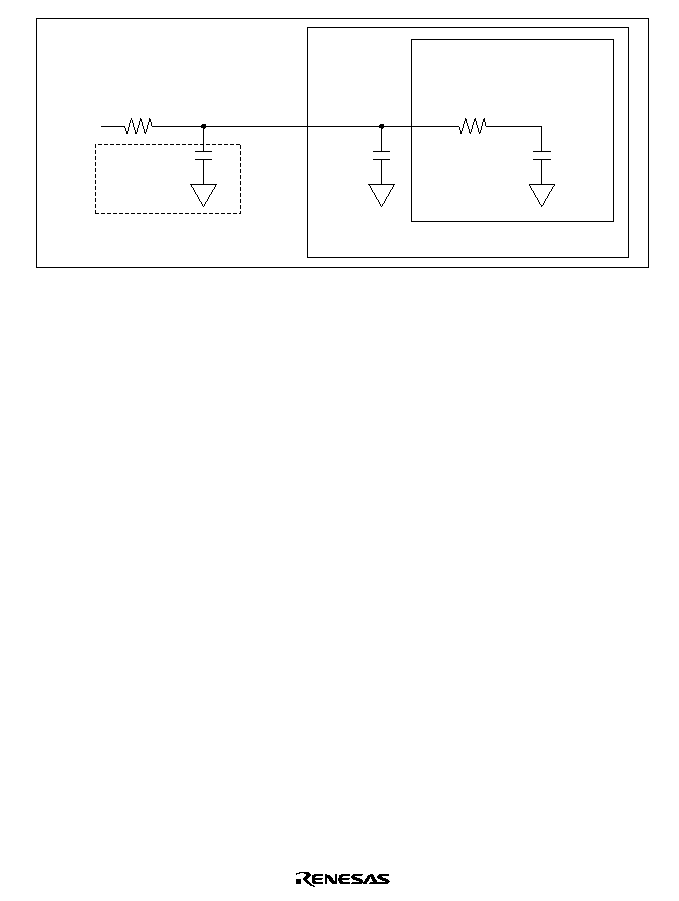
535
Equivalent circuit of
A/D converter
H8/3006 and
H8/3007
20 pF
Cin =
15 pF
10 k
Up to 10 k
Low-pass
filter
C Up to 0.1
µ
F
Sensor output impedance
Sensor
input
Figure 15.11 Analog Input Circuit (Example)
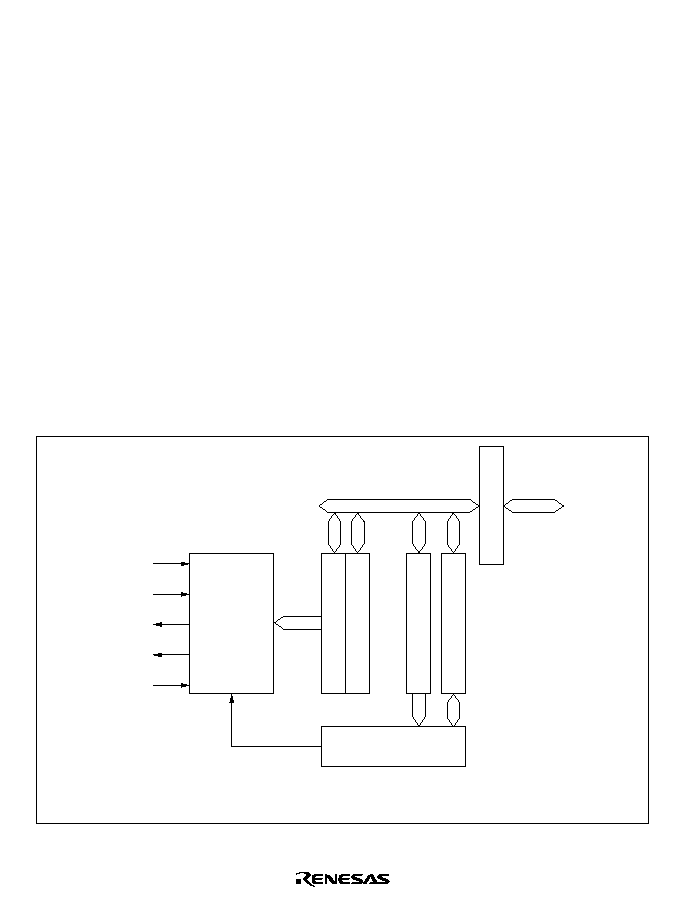
537
Section 16 D/A Converter
16.1
Overview
The H8/3006 and H8/3007 include a D/A converter with two channels.
16.1.1
Features
D/A converter features are listed below.
∑
Eight-bit resolution
∑
Two output channels
∑
Conversion time: maximum 10 µs (with 20-pF capacitive load)
∑
Output voltage: 0 V to V
REF
∑
D/A outputs can be sustained in software standby mode
16.1.2
Block Diagram
Figure 16.1 shows a block diagram of the D/A converter.
DADR0
DADR1
DACR
DASTCR
V
AV
DA
DA
AV
REF
CC
SS
0
1
Legend
DACR:
DADR0:
DADR1:
DASTCR:
8-bit D/A
Module data bus
Bus interface
On-chip
data bus
Control circuit
D/A control register
D/A data register 0
D/A data register 1
D/A standby control register
Figure 16.1 D/A Converter Block Diagram
538
16.1.3
Pin Configuration
Table 16.1 summarizes the D/A converter's input and output pins.
Table 16.1
D/A Converter Pins
Pin Name
Abbreviation I/O
Function
Analog power supply pin
AV
SS
Input
Analog power supply and reference voltage
Analog ground pin
AV
SS
Input
Analog ground and reference voltage
Analog output pin 0
DA
0
Output
Analog output, channel 0
Analog output pin 1
DA
1
Output
Analog output, channel 1
Reference voltage input pin
V
REF
Input
Analog reference voltage
16.1.4
Register Configuration
Table 16.2 summarizes the D/A converter's registers.
Table 16.2
D/A Converter Registers
Address*
Name
Abbreviation
R/W
Initial Value
H'FFF9C
D/A data register 0
DADR0
R/W
H'00
H'FFF9D
D/A data register 1
DADR1
R/W
H'00
H'FFF9E
D/A control register
DACR
R/W
H'1F
H'EE01A
D/A standby control register
DASTCR
R/W
H'FE
Note: * Lower 20 bits of the address in advanced mode.
539
16.2
Register Descriptions
16.2.1
D/A Data Registers 0 and 1 (DADR0/1)
Bit
Initial value
Read/Write
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
2
0
R/W
1
0
R/W
0
0
R/W
The D/A data registers (DADR0 and DADR1) are 8-bit readable/writable registers that store the
data to be converted. When analog output is enabled, the D/A data register values are constantly
converted and output at the analog output pins.
The D/A data registers are initialized to H'00 by a reset and in standby mode.
When the DASTE bit is set to 1 in the D/A standby control register (DASTCR), the D/A registers
are not initialized in software standby mode.
16.2.2
D/A Control Register (DACR)
Bit
Initial value
Read/Write
7
DAOE1
0
R/W
6
DAOE0
0
R/W
5
DAE
0
R/W
4
--
1
--
3
--
1
--
2
--
1
--
1
--
1
--
0
--
1
--
D/A output enable 1
D/A output enable 0
D/A enable
Controls D/A conversion and analog output
Controls D/A conversion and analog output
Controls D/A conversion
DACR is an 8-bit readable/writable register that controls the operation of the D/A converter.
DACR is initialized to H'1F by a reset and in standby mode.
When the DASTE bit is set to 1 in DASTCR, the DACR is not initialized in software standby
mode.

540
Bit 7--D/A Output Enable 1 (DAOE1): Controls D/A conversion and analog output.
Bit 7
DAOE1
Description
0
DA
1
analog output is disabled
1
Channel-1 D/A conversion and DA
1
analog output are enabled
Bit 6--D/A Output Enable 0 (DAOE0): Controls D/A conversion and analog output.
Bit 6
DAOE0
Description
0
DA
0
analog output is disabled
1
Channel-0 D/A conversion and DA
0
analog output are enabled
Bit 5--D/A Enable (DAE): Controls D/A conversion, together with bits DAOE0 and DAOE1.
When the DAE bit is cleared to 0, analog conversion is controlled independently in channels 0
and 1. When the DAE bit is set to 1, analog conversion is controlled together in channels 0 and 1.
Output of the conversion results is always controlled independently by DAOE0 and DAOE1.
Bit 7
DAOE1
Bit 6
DAOE0
Bit 5
DAE
Description
0
0
--
D/A conversion is disabled in channels 0 and 1
1
0
D/A conversion is enabled in channel 0
D/A conversion is disabled in channel 1
1
D/A conversion is enabled in channels 0 and 1
1
0
0
D/A conversion is disabled in channel 0
D/A conversion is enabled in channel 1
1
D/A conversion is enabled in channels 0 and 1
1
--
D/A conversion is enabled in channels 0 and 1
When the DAE bit is set to 1, even if bits DAOE0 and DAOE1 in DACR and the ADST bit in
ADCSR are cleared to 0, the same current is drawn from the analog power supply as during A/D
and D/A conversion.
Bits 4 to 0--Reserved: These bits cannot be modified and are always read as 1.
541
16.2.3
D/A Standby Control Register (DASTCR)
DASTCR is an 8-bit readable/writable register that enables or disables D/A output in software
standby mode.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
--
1
--
0
DASTE
0
R/W
2
--
1
--
1
--
1
--
Reserved bits
D/A standby enable
Enables or disables D/A output
in software standby mode
DASTCR is initialized to H'FE by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bits 7 to 1--Reserved: These bits cannot be modified and are always read as 1.
Bit 0--D/A Standby Enable (DASTE): Enables or disables D/A output in software standby
mode.
Bit 0
DASTE
Description
0
D/A output is disabled in software standby mode
(Initial value)
1
D/A output is enabled in software standby mode

542
16.3
Operation
The D/A converter has two built-in D/A conversion circuits that can perform conversion
independently.
D/A conversion is performed constantly while enabled in DACR. If the DADR0 or DADR1 value
is modified, conversion of the new data begins immediately. The conversion results are output
when bits DAOE0 and DAOE1 are set to 1.
An example of D/A conversion on channel 0 is given next. Timing is indicated in figure 16.2.
1. Data to be converted is written in DADR0.
2. Bit DAOE0 is set to 1 in DACR. D/A conversion starts and DA0 becomes an output pin. The
converted result is output after the conversion time.
◊
V
REF
The output value is
DADR contents
256
Output of this conversion result continues until the value in DADR0 is modified or the DAOE0
bit is cleared to 0.
3. If the DADR0 value is modified, conversion starts immediately, and the result is output after
the conversion time.
4. When the DAOE0 bit is cleared to 0, DA0 becomes an input pin.
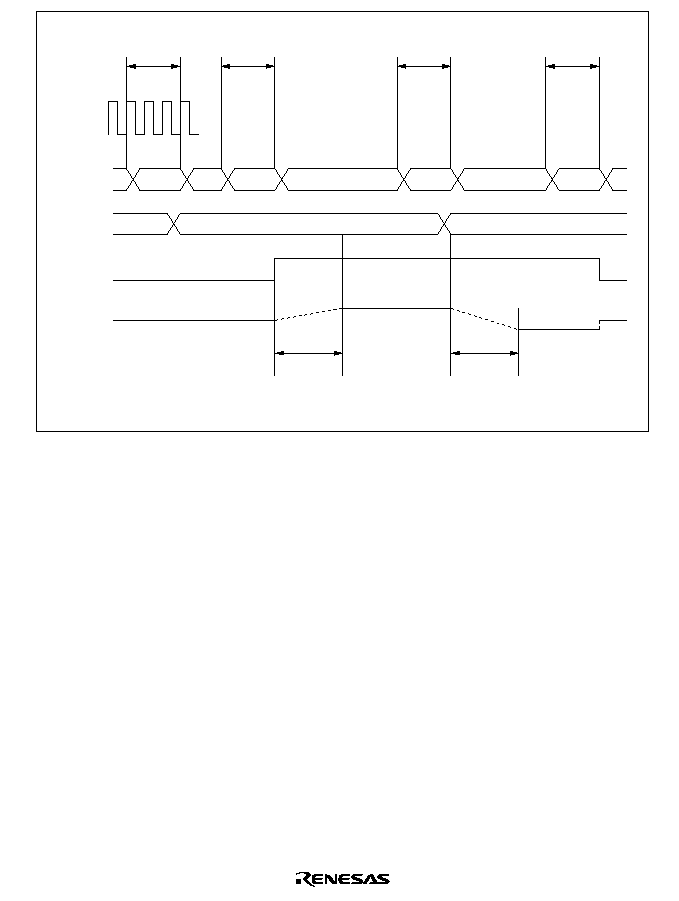
543
DADR0
write cycle
DACR
write cycle
DADR0
write cycle
DACR
write cycle
Address
DADR0
DAOE0
DA
0
Conversion data 1
Conversion data 2
High-impedance state
Conversion
result 1
Conversion
result 2
t
DCONV
t
DCONV
Legend
t : D/A conversion time
DCONV
Figure 16.2 Example of D/A Converter Operation

544
16.4
D/A Output Control
In the H8/3006 and H8/3007, D/A converter output can be enabled or disabled in software standby
mode.
When the DASTE bit is set to 1 in DASTCR, D/A converter output is enabled in software standby
mode. The D/A converter registers retain the values they held prior to the transition to software
standby mode.
When D/A output is enabled in software standby mode, the reference supply current is the same as
during normal operation.
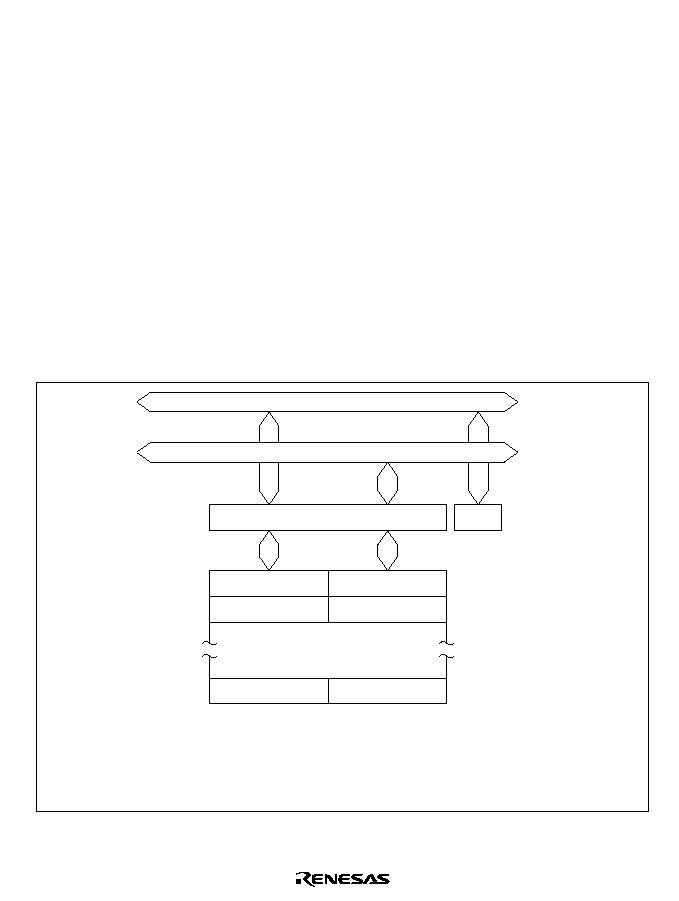
545
Section 17 RAM
17.1
Overview
The H8/3007 has 4 kbytes of high-speed static RAM on-chip. The H8/3006 has 2 kbytes. The
RAM is connected to the CPU by a 16-bit data bus. The CPU accesses both byte data and word
data in two states, making the RAM useful for rapid data transfer.
The on-chip RAM of the H8/3007 is assigned to addresses H'FEF20 to H'FFF1F in modes 1 and 2,
and to addresses H'FFEF20 to H'FFFF1F in modes 3 and 4. The on-chip RAM of the H8/3006 are
assigned to addresses H'FF720 to H'FFF1F in modes 1 and 2, and to addresses H'FFF720 to
H'FFFF1F in modes 3 and 4. The RAM enable bit (RAME) in the system control register
(SYSCR) can enable or disable the on-chip RAM.
17.1.1
Block Diagram
Figure 17.1 shows a block diagram of the on-chip RAM.
H'FEF20
H'FEF22
H'FFF1E
H'FEF21
H'FEF23
H'FFF1F
On-chip data bus (upper 8 bits)
On-chip data bus (lower 8 bits)
Bus interface
SYSCR
On-chip RAM
Even addresses
Odd addresses
Legend
SYSCR: System control register
Note:
This example is of the H8/3007 operating in mode 1 and 2. The lower 20 bits of the address
are shown.
Figure 17.1 RAM Block Diagram
546
17.1.2
Register Configuration
The on-chip RAM is controlled by SYSCR. Table 17.1 gives the address and initial value of
SYSCR.
Table 17.1
System Control Register
Address*
Name
Abbreviation
R/W
Initial Value
H'EE012
System control register
SYSCR
R/W
H'09
Note: * Lower 20 bits of the address in advanced mode.
547
17.2
System Control Register (SYSCR)
Bit
Initial value
Read/Write
7
SSBY
0
R/W
6
STS2
0
R/W
5
STS1
0
R/W
4
STS0
0
R/W
3
UE
1
R/W
2
NMIEG
0
R/W
1
SSOE
0
R/W
0
RAME
1
R/W
Software standby
Standby timer select 2 to 0
User bit enable
NMI edge select
Software standby
output port enable
RAM enable bit
Enables or
disables
on-chip RAM
One function of SYSCR is to enable or disable access to the on-chip RAM. The on-chip RAM is
enabled or disabled by the RAME bit in SYSCR. For details about the other bits, see section 3.3,
System Control Register (SYSCR).
Bit 0--RAM Enable (RAME): Enables or disables the on-chip RAM. The RAME bit is
initialized at the rising edge of the input at the
RES pin. It is not initialized in software standby
mode.
Bit 0
RAME
Description
0
On-chip RAM is disabled
1
On-chip RAM is enabled
(Initial value)

548
17.3
Operation
When the RAME bit is set to 1, the on-chip RAM is enabled. Accesses to addresses H'FEF20 to
H'FFF1F in the H8/3007 in modes 1 and 2, and to addresses H'FFEF20 to H'FFFF1F in the
H8/3007 in modes 3 and 4, are directed to the on-chip RAM. In the H8/3006, accesses to
addresses H'FF720 to H'FFF1F in modes 1 and 2, to addresses H'FFF720 to H'FFFF1F in modes 3
and 4, are directed to the on-chip RAM. In modes 1 to 4, when the RAME bit is cleared to 0, the
off-chip address space is accessed.
Since the on-chip RAM is connected to the CPU by an internal 16-bit data bus, it can be written
and read by word access. It can also be written and read by byte access. Byte data is accessed in
two states using the upper 8 bits of the data bus. Word data starting at an even address is accessed
in two states using all 16 bits of the data bus.
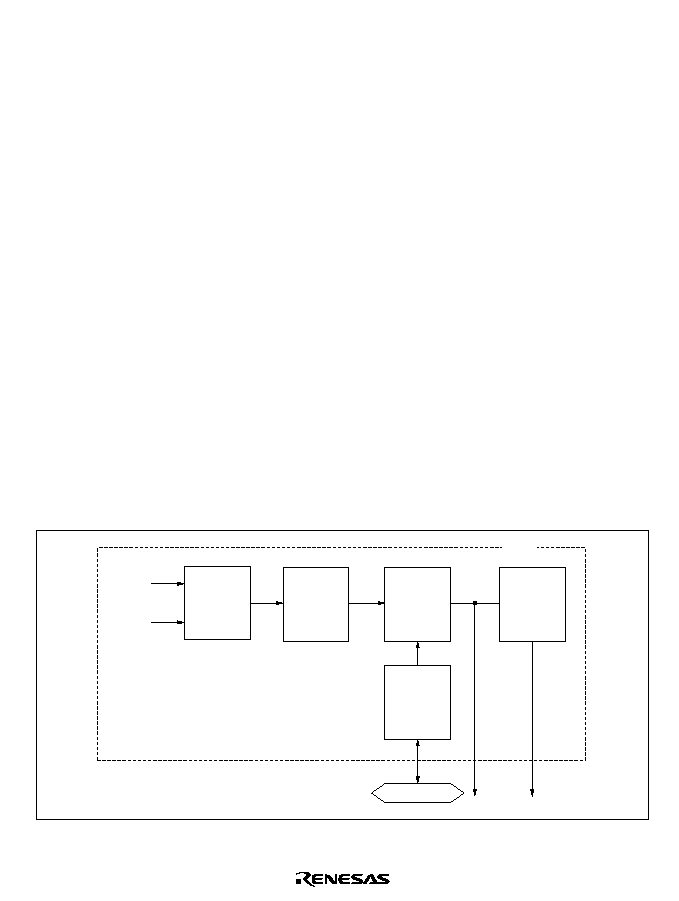
549
Section 18 Clock Pulse Generator
18.1
Overview
The H8/3006 and H8/3007 have a built-in clock pulse generator (CPG) that generates the system
clock (
) and other internal clock signals (
/2 to
/4096). After duty adjustment, a frequency
divider divides the clock frequency to generate the system clock (
). The system clock is output at
the
pin
*
1
and furnished as a master clock to prescalers that supply clock signals to the on-chip
supporting modules. Frequency division ratios of 1/1, 1/2, 1/4, and 1/8 can be selected for the
frequency divider by settings in a division control register (DIVCR)
*
2
. Power consumption in the
chip is reduced in almost direct proportion to the frequency division ratio.
Notes: 1. Usage of the
pin differs depending on the chip operating mode and the PSTOP bit
setting in the module standby control register (MSTCR). For details, see section 19.7,
System Clock Output Disabling Function.
2. The division ratio of the frequency divider can be changed dynamically during
operation. The clock output at the
pin also changes when the division ratio is
changed. The frequency output at the
pin is shown below.
= EXTAL
◊
n
where, EXTAL:Frequency of crystal resonator or external clock signal
n:
Frequency division ratio (n = 1/1, 1/2, 1/4, or 1/8)
18.1.1
Block Diagram
Figure 18.1 shows a block diagram of the clock pulse generator.
XTAL
EXTAL
CPG
/2 to
/4096
Oscillator
Duty
adjustment
circuit
Frequency
divider
Division
control
register
Prescalers
Data bus
Figure 18.1 Block Diagram of Clock Pulse Generator
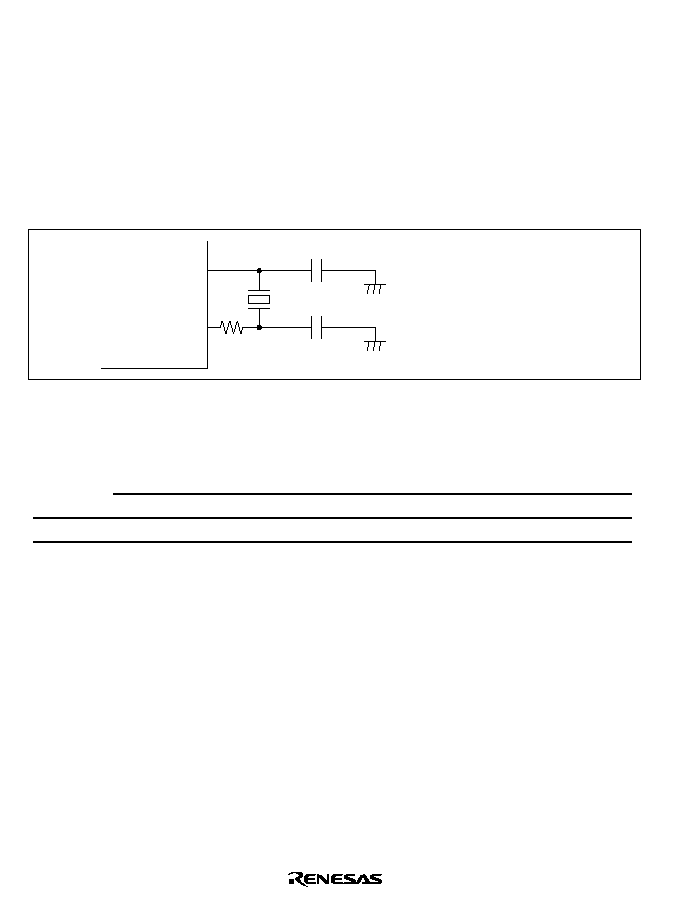
550
18.2
Oscillator Circuit
Clock pulses can be supplied by connecting a crystal resonator, or by input of an external clock
signal.
18.2.1
Connecting a Crystal Resonator
Circuit Configuration: A crystal resonator can be connected as in the example in figure 18.2.
The damping resistance Rd should be selected according to table 18.1. An AT-cut parallel-
resonance crystal should be used.
EXTAL
XTAL
C
C
C = C = 10 pF to 22 pF
L1 L2
L1
L2
Rd
Figure 18.2 Connection of Crystal Resonator (Example)
Table 18.1
Damping Resistance Value
Damping
Resistance
Frequency f (MHz)
Value
2
2 < f
4 4 < f
8 8 < f
10 10 < f
13 13 < f
16 16 < f
18 18 < f
20
Rd (
)
1 k
500
200
0
0
0
0
0
Note:
A crystal resonator between 2 MHz and 20 MHz can be used. If the chip is to be operated
at less than 2 MHz, the on-chip frequency divider should be used. (A crystal resonator of
less than 2 MHz cannot be used.)
Crystal Resonator: Figure 18.3 shows an equivalent circuit of the crystal resonator. The crystal
resonator should have the characteristics listed in table 18.2.

551
XTAL
L
Rs
C
L
C
0
EXTAL
AT-cut parallel-resonance type
Figure 18.3 Crystal Resonator Equivalent Circuit
Table 18.2
Crystal Resonator Parameters
Frequency (MHz)
2
4
8
10
12
16
18
20
Rs max (
)
500
120
80
70
60
50
40
40
Co (pF)
7 pF max
Use a crystal resonator with a frequency equal to the system clock frequency (
).
Notes on Board Design: When a crystal resonator is connected, the following points should be
noted:
Other signal lines should be routed away from the oscillator circuit to prevent induction from
interfering with correct oscillation. See figure 18.4.
When the board is designed, the crystal resonator and its load capacitors should be placed as close
as possible to the XTAL and EXTAL pins.
XTAL
EXTAL
C
L2
C
L1
H8/3006 and H8/3007
Avoid
Signal A
Signal B
Figure 18.4 Example of Incorrect Board Design
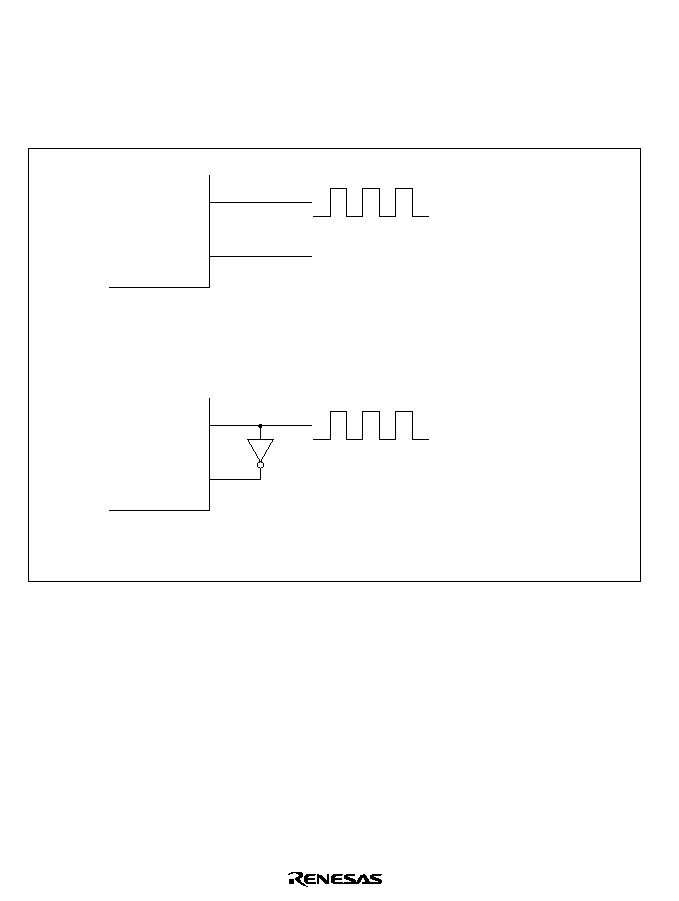
552
18.2.2
External Clock Input
Circuit Configuration: An external clock signal can be input as shown in the examples in figure
18.5. If the XTAL pin is left open, the stray capacitance should not exceed 10 pF. If the stray
capacitance at the XTAL pin exceeds 10 pF, use configuration b instead and hold the clock high in
standby mode.
EXTAL
XTAL
EXTAL
XTAL
External clock input
Open
External clock input
a. XTAL pin left open
b. Complementary clock input at XTAL pin
Figure 18.5 External Clock Input (Examples)
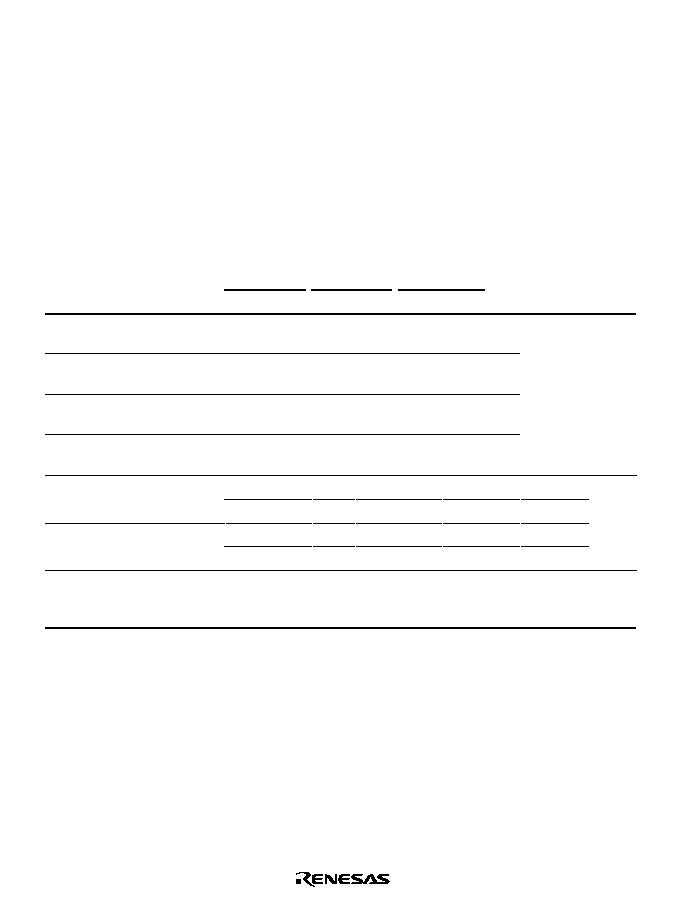
553
External Clock: The external clock frequency should be equal to the system clock frequency
when not divided by the on-chip frequency divider. Table 18.3 shows the clock timing, figure 18.6
shows the external clock input timing, and figure 18.7 shows the external clock output settling
delay timing. When the appropriate external clock is input via the EXTAL pin, its waveform is
corrected by the on-chip oscillator and duty adjustment circuit.
When the appropriate external clock is input via the EXTAL pin, its waveform is corrected by the
on-chip oscillator and duty adjustment circuit. The resulting stable clock is output to external
devices after the external clock settling time (t
DEXT
) has passed after the clock input. The system
must remain reset with the reset signal low during t
DEXT
, while the clock output is unstable.
Table 18.3
Clock Timing
V
CC
= 2.7 V
to 5.5 V
V
CC
= 3.0 V
to 5.5 V
V
CC
= 5.0 V ±
10%
Item
Symbol Min
Max
Min
Max
Min
Max
Unit Test Conditions
External clock input
low pulse width
t
EXL
40
--
30
--
15
--
ns
Figure 18.6
External clock input
high pulse width
t
EXH
40
--
30
--
15
--
ns
External clock rise
time
t
EXr
--
10
--
8
--
5
ns
External clock fall
time
t
EXf
--
10
--
8
--
5
ns
Clock low pulse
t
CL
0.4
0.6
0.4
0.6
0.4
0.6
t
cyc
5 MHz Figure
width
80
--
80
--
80
--
ns
< 5 MHz
20.3
Clock high pulse
t
CH
0.4
0.6
0.4
0.6
0.4
0.6
t
cyc
5 MHz
width
80
--
80
--
80
--
ns
< 5 MHz
External clock
output settling
delay time
t
DEXT
*
500
--
500
--
500
--
µs
Figure 18.7
Note:
* t
DEXT
includes a 10 t
cyc
of
RES
pulse width (t
RESW
).
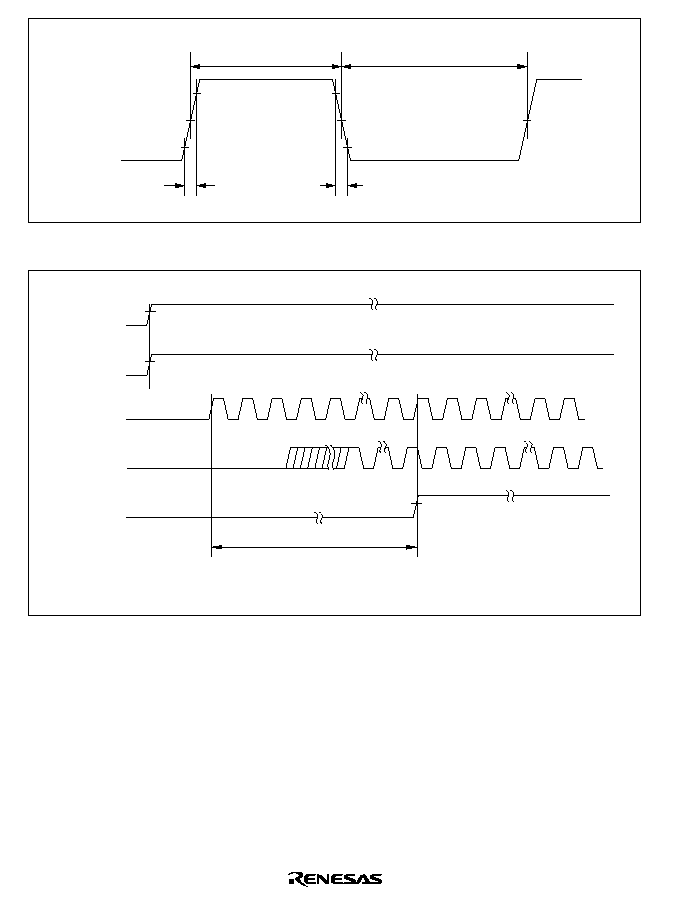
554
EXTAL
t
EXr
t
EXf
V
CC
◊
0.7
0.3 V
t
EXH
t
EXL
V
CC
◊
0.5
Figure 18.6 External Clock Input Timing
V
CC
STBY
EXTAL
(internal or
external)
RES
t
DEXT
*
Note: * t
DEXT
includes a 10 t
cyc
RES
pulse width (t
RESW
).
V
IH
Figure 18.7 External Clock Output Settling Delay Timing
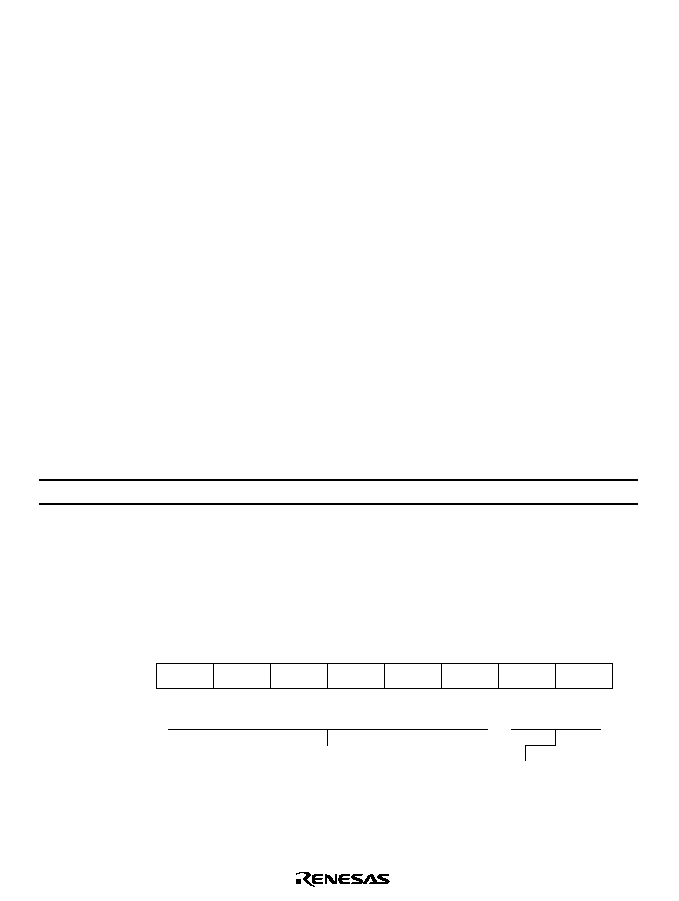
555
18.3
Duty Adjustment Circuit
When the oscillator frequency is 5 MHz or higher, the duty adjustment circuit adjusts the duty
cycle of the clock signal from the oscillator to generate
.
18.4
Prescalers
The prescalers divide the system clock (
) to generate internal clocks (
/2 to
/4096).
18.5
Frequency Divider
The frequency divider divides the duty-adjusted clock signal to generate the system clock (
). The
frequency division ratio can be changed dynamically by modifying the value in DIVCR, as
described below. Power consumption in the chip is reduced in almost direct proportion to the
frequency division ratio. The system clock generated by the frequency divider can be output at the
pin.
18.5.1
Register Configuration
Table 18.4 summarizes the frequency division register.
Table 18.4
Frequency Division Register
Address*
Name
Abbreviation
R/W
Initial Value
H'EE01B
Division control register
DIVCR
R/W
H'FC
Note: * Lower 20 bits of the address in advanced mode.
18.5.2
Division Control Register (DIVCR)
DIVCR is an 8-bit readable/writable register that selects the division ratio of the frequency
divider.
Bit
Initial value
Read/Write
7
--
1
--
6
--
1
--
5
--
1
--
4
--
1
--
3
--
1
--
0
DIV0
0
R/W
2
--
1
--
1
DIV1
0
R/W
Reserved bits
Divide bits 1 and 0
These bits select the
frequency division ratio
DIVCR is initialized to H'FC by a reset and in hardware standby mode. It is not initialized in
software standby mode.

556
Bits 7 to 2--Reserved: These bits cannot be modified and are always read as 1.
Bits 1 and 0--Divide (DIV1 and DIV0): These bits select the frequency division ratio, as
follows.
Bit 1
DIV1
Bit 0
DIV0
Frequency Division Ratio
0
0
1/1
(Initial value)
0
1
1/2
1
0
1/4
1
1
1/8
18.5.3
Usage Notes
The DIVCR setting changes the
frequency, so note the following points.
∑
Select a frequency division ratio that stays within the assured operation range specified for the
clock cycle time t
cyc
in the AC electrical characteristics. Set ¯min to the lower limit of the
operating frequency range, and ensure that ¯ does not fall below this lower limit.
∑
All on-chip module operations are based on
. Note that the timing of timer operations, serial
communication, and other time-dependent processing differs before and after any change in the
division ratio. The waiting time for exit from software standby mode also changes when the
division ratio is changed. For details, see section 19.4.3, Selection of Waiting Time for Exit
from Software Standby Mode.

557
Section 19 Power-Down State
19.1
Overview
The H8/3006 and H8/3007 have a power-down state that greatly reduces power consumption by
halting the CPU, and a module standby function that reduces power consumption by selectively
halting on-chip modules.
The power-down state includes the following three modes:
∑
Sleep mode
∑
Software standby mode
∑
Hardware standby mode
The module standby function can halt on-chip supporting modules independently of the power-
down state. The modules that can be halted are the 16-bit timer, 8-bit timer, SCI0, SCI1, SCI2,
DMAC, DRAM interface, and A/D converter.
Table 19.1 indicates the methods of entering and exiting the power-down modes and module
standby mode, and gives the status of the CPU and on-chip supporting modules in each mode.
558
Table 19.1
Power-Down State and Module Standby Function
Clock
Active
Halted
Halted
Active
Exiting
Conditions
∑
Interrupt
∑
RES
∑
STBY
∑
NMI
∑
IRQ
0
to IRQ
2
∑
RES
∑
STBY
∑
STBY
∑
RES
∑
STBY
∑
RES
∑
Clear MSTCR
bit to 0*
5
I/O
Ports
Held
Held
High
impedance
--
clock
output
output
High
output
High
impedance
High
impedance*
2
RAM
Held
Held
Held*
3
--
Other
Modules
Active
Halted
and
reset
Halted
and
reset
Active
DRAM
Interface
Active
Halted
and
held*
1
Halted
and
reset
Halted*
2
and
held*
1
DMAC
Active
Halted
and
reset
Halted
and
reset
Halted*
2
and
reset
CPU
Registers
Held
Held
Undeter-
mined
--
CPU
Halted
Halted
Halted
Active
Entering
Conditions
SLEEP
instruc-
tion executed
while SSBY
= 0
in SYSCR
SLEEP
instruc-
tion executed
while SSBY
= 1
in SYSCR
Low input at
STBY
pin
Corresponding
bit set to 1 in
MSTCRH and
MSTCRL
Sleep
mode
Software
standby
mode
Hardware
standby
mode
Module
standby
16-Bit
Timer
Active
Halted
and
reset
Halted
and
reset
Halted*
2
and
reset
8-Bit
Timer
Active
Halted
and
reset
Halted
and
reset
Halted*
2
and
reset
SCI0
Active
Halted
and
reset
Halted
and
reset
Halted*
2
and
reset
SCI1
Active
Halted
and
reset
Halted
and
reset
Halted*
2
and
reset
SCI2
Active
Halted
and
reset
Halted
and
reset
Halted*
2
and
reset
A/D
Active
Halted
and
reset
Halted
and
reset
Halted*
2
and
reset
State
Notes: 1.
R
TCNT
and bits 7 and 6 of R
TMCSR are initialized. Other bits and registers hold their previous states.
2.
State in which the corresponding MSTCR bit was set to 1. For details see section 19.2.2, Module Standby Control RegisterH (MS
TCRH) and section 19.2.3,
Module Standby Control Register L
(MSTCRL).
3.
The RAME bit must be cleared to 0 in SYSCR before the transition from the program execution state to hardware standby mode.
4.
When P6
7
is used as the
output pin.
5.
When a MSTCR bit is set to 1, the registers of the corresponding on-chip supporting module are initialized.
T
o
restart the mo
dule, first clear the MSTCR bit to 0,
then set up the module registers again.
Legend
SYSCR:
System control register
SSBY
:
Software standby bit
MSTCRH:
Module standby control register H
MSTCRL:
Module standby control register L
*
4
Mode/
Function
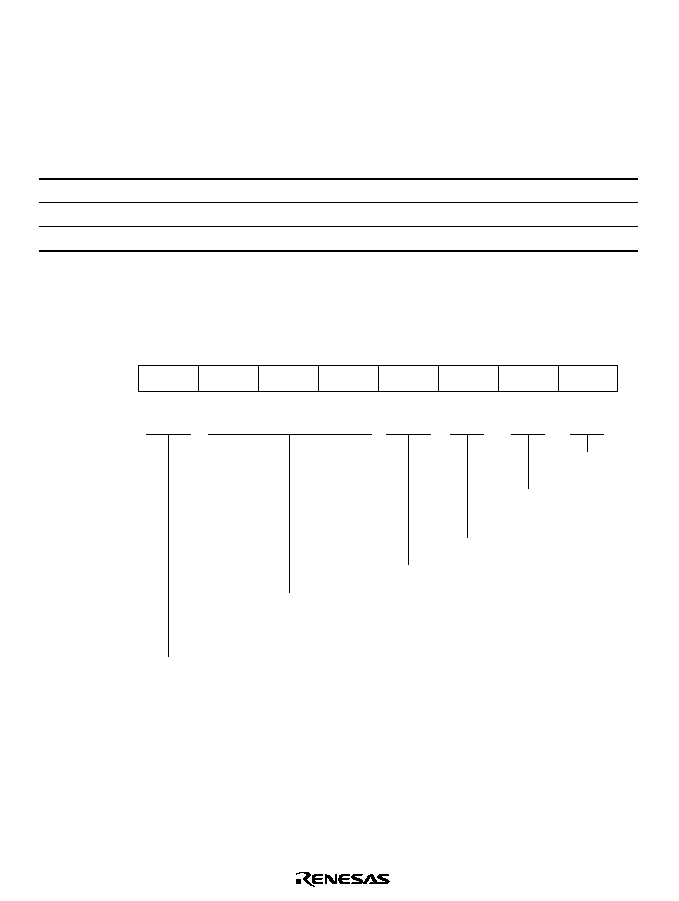
559
19.2
Register Configuration
The H8/3006 and H8/3007 have a system control register (SYSCR) that controls the power-down
state, and module standby control registers H (MSTCRH) and L (MSTCRL) that control the
module standby function. Table 19.2 summarizes these registers.
Table 19.2
Control Register
Address*
Name
Abbreviation
R/W
Initial Value
H'EE012
System control register
SYSCR
R/W
H'09
H'EE01C
Module standby control register H
MSTCRH
R/W
H'78
H'EE01D
Module standby control register L
MSTCRL
R/W
H'00
Note: * Lower 20 bits of the address in advanced mode.
19.2.1
System Control Register (SYSCR)
Bit
Initial value
Read/Write
7
SSBY
0
R/W
6
STS2
0
R/W
5
STS1
0
R/W
4
STS0
0
R/W
3
UE
1
R/W
0
RAME
1
R/W
2
NMIEG
0
R/W
1
SSOE
0
R/W
Software standby
Enables transition to
software standby mode
RAM enable
Standby timer select 2 to 0
These bits select the
waiting time of the CPU
and peripheral functions
User bit enable
NMI edge select
Software standby
output port enable
SYSCR is an 8-bit readable/writable register. Bit 7 (SSBY), bits 6 to 4 (STS2 to STS0), and bit 1
(SSOE) control the power-down state. For information on the other SYSCR bits, see section 3.3,
System Control Register (SYSCR).
560
Bit 7--Software Standby (SSBY): Enables transition to software standby mode. When software
standby mode is exited by an external interrupt, this bit remains set to 1 after the return to normal
operation. To clear this bit, write 0.
Bit 7
SSBY
Description
0
SLEEP instruction causes transition to sleep mode
(Initial value)
1
SLEEP instruction causes transition to software standby mode
Bits 6 to 4--Standby Timer Select (STS2 to STS0): These bits select the length of time the CPU
and on-chip supporting modules wait for the clock to settle when software standby mode is exited
by an external interrupt. If the clock is generated by a crystal resonator, set these bits according to
the clock frequency so that the waiting time will be at least 7 ms (oscillation settling time). See
table 19.3. If an external clock is used, any setting is permitted.
Bit 6
STS2
Bit 5
STS1
Bit 4
STS0
Description
0
0
0
Waiting time = 8,192 states
(Initial value)
1
Waiting time = 16,384 states
1
0
Waiting time = 32,768 states
1
Waiting time = 65,536 states
1
0
0
Waiting time = 131,072 states
1
Waiting time = 262,144 states
1
0
Waiting time = 1,024 states
1
Illegal setting
Bit 1--Software Standby Output Port Enable (SSOE): Specifies whether the address bus and
bus control signals (
CS
0
to
CS
7
,
AS, RD, HWR, LWR, UCAS, LCAS, and RFSH) are kept as
outputs or fixed high, or placed in the high-impedance state in software standby mode.
Bit 1
SSOE
Description
0
In software standby mode, the address bus and bus control signals
are all high-impedance
(Initial value)
1
In software standby mode, the address bus retains its output state and
bus control signals are fixed high
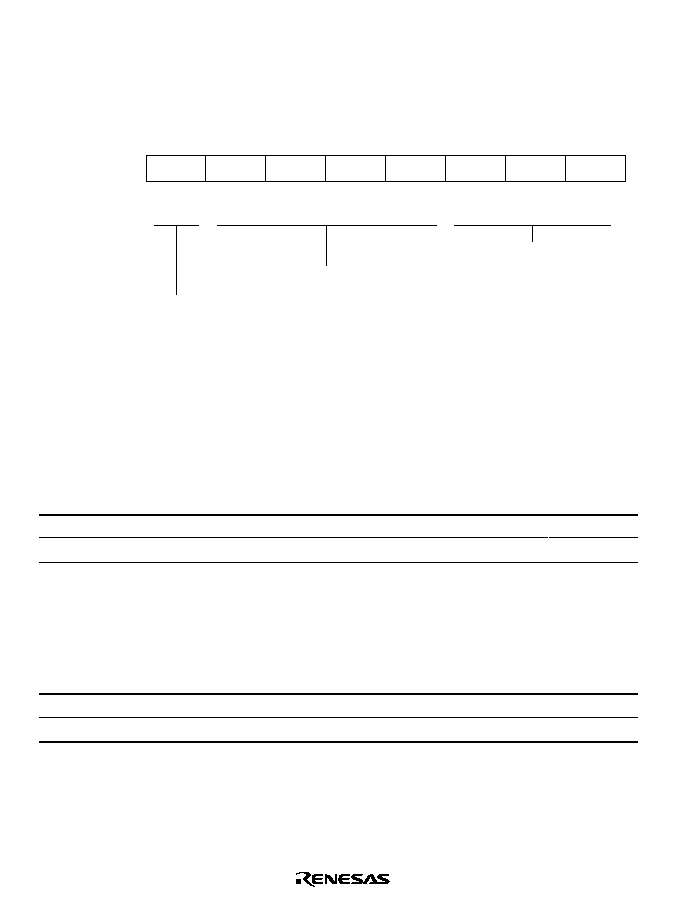
561
19.2.2
Module Standby Control RegisterH (MSTCRH)
MSTCRH is an 8-bit readable/writable register that controls output of the system clock (
). It also
controls the module standby function, which places individual on-chip supporting modules in the
standby state. Module standby can be designated for the SCI0, SCI1, SCI2.
Bit
Initial value
Read/Write
7
PSTOP
0
R/W
6
--
1
--
5
--
1
--
4
--
1
--
3
--
1
--
0
MSTPH0
0
R/W
2
MSTPH2
0
R/W
1
MSTPH1
0
R/W
clock stop
Enables or disables
output of the system clock
Module standby H2 to 0
These bits select modules
to be placed in standby
Reserved bit
MSTCRH is initialized to H'78 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bit 7--
Clock Stop (PSTOP): Enables or disables output of the system clock (
).
Bit 1
PSTOP
Description
0
System clock output is enabled
(Initial value)
1
System clock output is disabled
Bits 6 to 3--Reserved: These bits cannot be modified and are always read as 1.
Bit 2--Module Standby H2 (MSTPH2): Selects whether to place the SCI2 in standby.
Bit 2
MSTPH2
Description
0
SCI2 operates normally
(Initial value)
1
SCI2 is in standby state
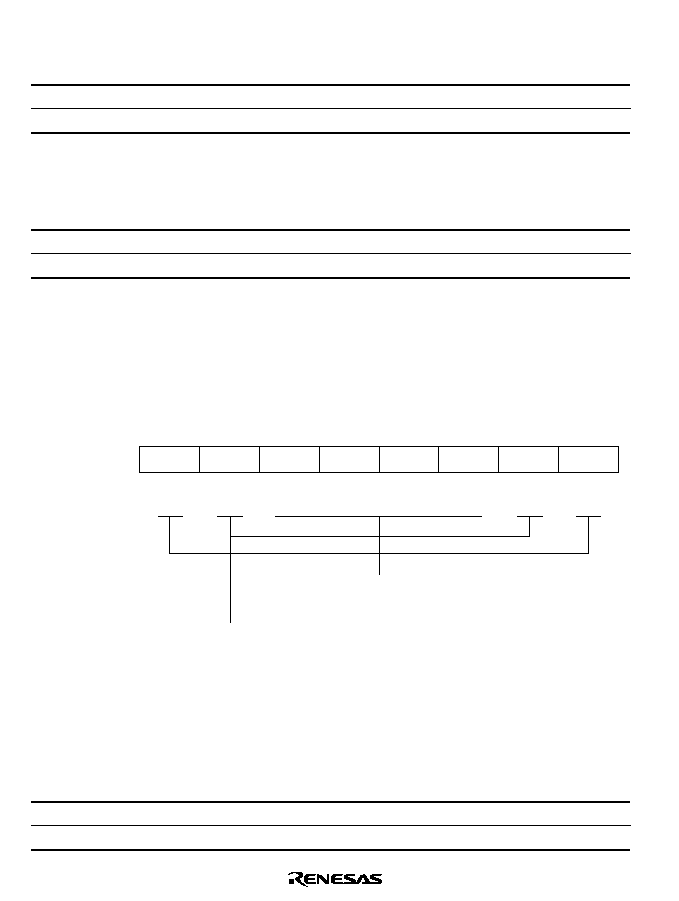
562
Bit 1--Module Standby H1 (MSTPH1): Selects whether to place the SCI1 in standby.
Bit 1
MSTPH1
Description
0
SCI1 operates normally
(Initial value)
1
SCI1 is in standby state
Bit 0--Module Standby H0 (MSTPH0): Selects whether to place the SCI0 in standby.
Bit 0
MSTPH0
Description
0
SCI0 operates normally
(Initial value)
1
SCI0 is in standby state
19.2.3
Module Standby Control Register L (MSTCRL)
MSTCRL is an 8-bit readable/writable register that controls the module standby function, which
places individual on-chip supporting modules in the standby state. Module standby can be
designated for the DMAC, 16-bit timer, DRAM interface, 8-bit timer, and A/D converter modules.
2
MSTPL2
0
R/W
1
--
0
R/W
0
MSTPL0
0
R/W
Reserved bits
Module standby L7, L5 to L2, L0
These bits select modules to be
placed in standby
Bit
Initial value
Read/Write
7
MSTPL7
0
R/W
6
--
0
R/W
5
MSTPL5
0
R/W
4
MSTPL4
0
R/W
3
MSTPL3
0
R/W
MSTCRL is initialized to H'00 by a reset and in hardware standby mode. It is not initialized in
software standby mode.
Bit 7--Module Standby L7 (MSTPL7): Selects whether to place the DMAC in standby.
Bit 7
MSTPL7
Description
0
DMAC operates normally
(Initial value)
1
DMAC is in standby state
563
Bit 6--Reserved: This bit can be written and read.
Bit 5--Module Standby L5 (MSTPL5): Selects whether to place the DRAM interface in
standby.
Bit 5
MSTPL5
Description
0
DRAM interface operates normally
(Initial value)
1
DRAM interface is in standby state
Bit 4--Module Standby L4 (MSTPL4): Selects whether to place the 16-bit timer in standby.
Bit 4
MSTPL4
Description
0
16-bit timer operates normally
(Initial value)
1
16-bit timer is in standby state
Bit 3--Module Standby L3 (MSTPL3): Selects whether to place 8-bit timer channels 0 and 1 in
standby.
Bit 3
MSTPL3
Description
0
8-bit timer channels 0 and 1 operate normally
(Initial value)
1
8-bit timer channels 0 and 1 are in standby state
Bit 2--Module Standby L2 (MSTPL2): Selects whether to place 8-bit timer channels 2 and 3 in
standby.
Bit 2
MSTPL2
Description
0
8-bit timer channels 2 and 3 operate normally
(Initial value)
1
8-bit timer channels 2 and 3 are in standby state
Bit 1--Reserved: This bit can be written and read.
Bit 0--Module Standby L0 (MSTPL0): Selects whether to place the A/D converter in standby.
Bit 0
MSTPL0
Description
0
A/D converter operates normally
(Initial value)
1
A/D converter is in standby state

564
19.3
Sleep Mode
19.3.1
Transition to Sleep Mode
When the SSBY bit is cleared to 0 in SYSCR, execution of the SLEEP instruction causes a
transition from the program execution state to sleep mode. Immediately after executing the SLEEP
instruction the CPU halts, but the contents of its internal registers are retained. The DMA
controller (DMAC), DRAM interface, and on-chip supporting modules do not halt in sleep mode.
Modules which have been placed in standby by the module standby function, however, remain
halted.
19.3.2
Exit from Sleep Mode
Sleep mode is exited by an interrupt, or by input at the
RES or STBY pin.
Exit by Interrupt: An interrupt terminates sleep mode and causes a transition to the interrupt
exception handling state. Sleep mode is not exited by an interrupt source in an on-chip supporting
module if the interrupt is disabled in the on-chip supporting module. Sleep mode is not exited by
an interrupt other than NMI if the interrupt is masked by interrupt priority settings and the settings
of the I and UI bits in CCR, IPR.
Exit by
RES Input: Low input at the RES pin exits from sleep mode to the reset state.
Exit by
STBY Input: Low input at the STBY pin exits from sleep mode to hardware standby
mode.

565
19.4
Software Standby Mode
19.4.1
Transition to Software Standby Mode
To enter software standby mode, execute the SLEEP instruction while the SSBY bit is set to 1 in
SYSCR.
In software standby mode, current dissipation is reduced to an extremely low level because the
CPU, clock, and on-chip supporting modules all halt. The DMAC and on-chip supporting modules
are reset and halted. As long as the specified voltage is supplied, however, CPU register contents
and on-chip RAM data are retained. The settings of the I/O ports and DRAM interface
*
are also
held.
When the WDT is used as a watchdog timer (WT/
IT = 1), the TME bit must be cleared to 0 before
setting SSBY. Also, when setting TME to 1, SSBY should be cleared to 0.
Clear the BRLE bit in BRCR (inhibiting bus release) before making a transition to software
standby mode.
Note:
*
RTCNT and bits 7 and 6 of RTMCSR are initialized. Other bits and registers hold their
previous states.
19.4.2
Exit from Software Standby Mode
Software standby mode can be exited by input of an external interrupt at the NMI,
IRQ
0
,
IRQ
1
, or
IRQ
2
pin, or by input at the
RES or STBY pin.
Exit by Interrupt: When an NMI, IRQ
0
, IRQ
1
, or IRQ
2
interrupt request signal is received, the
clock oscillator begins operating. After the oscillator settling time selected by bits STS2 to STS0
in SYSCR, stable clock signals are supplied to the entire chip, software standby mode ends, and
interrupt exception handling begins. Software standby mode is not exited if the interrupt enable
bits of interrupts IRQ
0
, IRQ
1
, and IRQ
2
are cleared to 0, or if these interrupts are masked in the
CPU.
Exit by
RES Input: When the RES input goes low, the clock oscillator starts and clock pulses are
supplied immediately to the entire chip. The
RES signal must be held low long enough for the
clock oscillator to stabilize. When
RES goes high, the CPU starts reset exception handling.
Exit by
STBY Input: Low input at the STBY pin causes a transition to hardware standby mode.
566
19.4.3
Selection of Waiting Time for Exit from Software Standby Mode
Bits STS2 to STS0 in SYSCR and bits DIV1 and DIV0 in DIVCR should be set as follows.
Crystal Resonator: Set STS2 to STS0, DIV1, and DIV0 so that the waiting time (for the clock to
stabilize) is at least 7 ms. Table 19.3 indicates the waiting times that are selected by STS2 to
STS0, DIV1, and DIV0 settings at various system clock frequencies.
External Clock: Any values may be set.
Table 19.3
Clock Frequency and Waiting Time for Clock to Settle
DIV1 DIV0 STS2 STS1 STS0 Waiting Time 20 MHz 18 MHz 16 MHz 12 MHz 10 MHz 8 MHz 6 MHz 4 MHz 2 MHz 1 MHz
0
0
0
0
0
8192 states
0.4
0.46
0.51
0.65
0.8
1.0
1.3
2.0
4.1
8.2*
0
0
1
16384 states 0.8
0.91
1.0
1.3
1.6
2.0
2.7
4.1
8.2*
16.4
0
1
0
32768 states 1.6
1.8
2.0
2.7
3.3
4.1
5.5
8.2*
16.4
32.8
0
1
1
65536 states 3.3
3.6
4.1
5.5
6.6
8.2*
10.9*
16.4
32.8
65.5
1
0
0
131072 states 6.6
7.3*
8.2*
10.9*
13.1*
16.4
21.8
32.8
65.5
131.1
1
0
1
262144 states 13.1*
14.6
16.4
21.8
26.2
32.8
43.7
65.5
131.1 262.1
1
1
0
1024 states
0.05
0.057
0.064
0.085
0.10
0.13
0.17
0.26
0.51
1.0
1
1
1
Illegal setting
0
1
0
0
0
8192 states
0.8
0.91
1.02
1.4
1.6
2.0
2.7
4.1
8.2*
16.4*
0
0
1
16384 states 1.6
1.8
2.0
2.7
3.3
4.1
5.5
8.2*
16.4
32.8
0
1
0
32768 states 3.3
3.6
4.1
5.5
6.6
8.2*
10.9*
16.4
32.8
65.5
0
1
1
65536 states 6.6
7.3*
8.2*
10.9*
13.1*
16.4
21.8
32.8
65.5
131.1
1
0
0
131072 states 13.1*
14.6
16.4
21.8
26.2
32.8
43.7
65.5
131.1 262.1
1
0
1
262144 states 26.2
29.1
32.8
43.7
52.4
65.5
87.4
131.1 262.1 524.3
1
1
0
1024 states
0.10
0.11
0.13
0.17
0.20
0.26
0.34
0.51
1.0
2.0
1
1
1
Illegal setting
1
0
0
0
0
8192 states
1.6
1.8
2.0
2.7
3.3
4.1
5.5
8.2*
16.4*
32.8*
0
0
1
16384 states 3.3
3.6
4.1
5.5
6.6
8.2*
10.9*
16.4
32.8
65.5
0
1
0
32768 states 6.6
7.3*
8.2*
10.9*
13.1*
16.4
21.8
32.8
65.5
131.1
0
1
1
65536 states 13.1*
14.6
16.4
21.8
26.2
32.8
43.7
65.5
131.1 262.1
1
0
0
131072 states 26.2
29.1
32.8
43.7
52.4
65.5
87.4
131.1 262.1 524.3
1
0
1
262144 states 52.4
58.3
65.5
87.4
104.9
131.1 174.8 262.1 524.3 1048.6
1
1
0
1024 states
0.20
0.23
0.26
0.34
0.41
0.51
0.68
1.02
2.0
4.1
1
1
1
Illegal setting
1
1
0
0
0
8192 states
3.3
3.6
4.1
5.5
6.6
8.2*
10.9*
16.4*
32.8*
65.5
0
0
1
16384 states 6.6
7.3*
8.2*
10.9*
13.1*
16.4
21.8
32.8
65.5
131.1
0
1
0
32768 states 13.1*
14.6
16.4
21.8
26.2
32.8
43.7
65.5
131.1 262.1
0
1
1
65536 states 26.2
29.1
32.8
43.7
52.4
65.5
87.4
131.1 262.1 524.3
1
0
0
131072 states 52.4
58.3
65.5
87.4
104.9
131.1 174.8 262.1 524.3 1048.6
1
0
1
262144 states 104.9
116.5
131.1
174.8
209.7
262.1 349.5 524.3 1048.6 2097.1
1
1
0
1024 states
0.41
0.46
0.51
0.68
0.82
1.0
1.4
2.0
4.1
8.2*
1
1
1
Illegal setting
* : Recommended setting
Unit
ms
ms
ms
ms
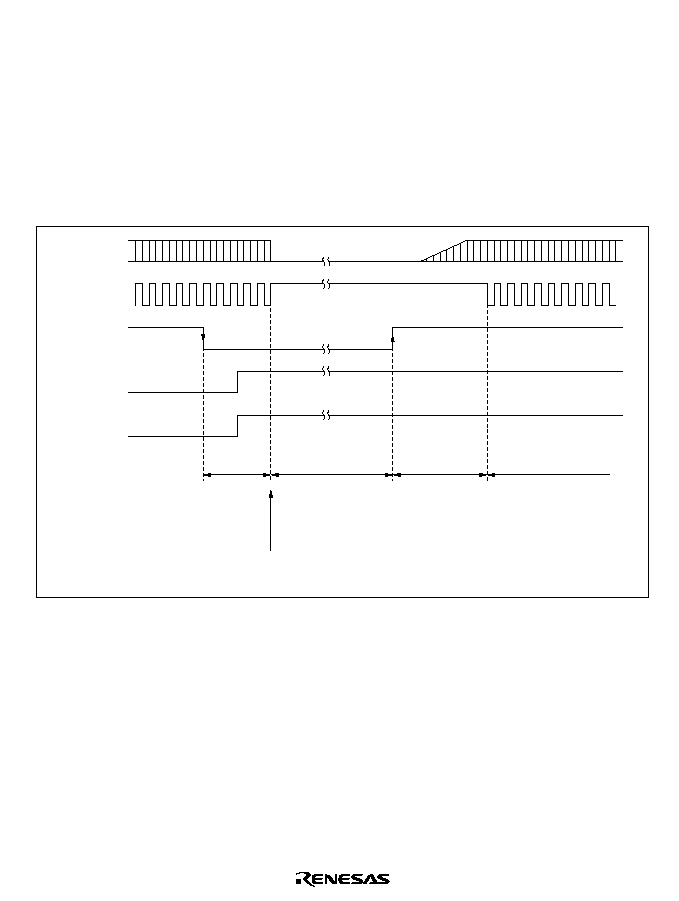
567
19.4.4
Sample Application of Software Standby Mode
Figure 19.1 shows an example in which software standby mode is entered at the fall of NMI and
exited at the rise of NMI.
With the NMI edge select bit (NMIEG) cleared to 0 in SYSCR (selecting the falling edge), an
NMI interrupt occurs. Next the NMIEG bit is set to 1 (selecting the rising edge) and the SSBY bit
is set to 1; then the SLEEP instruction is executed to enter software standby mode.
Software standby mode is exited at the next rising edge of the NMI signal.
NMI
NMIEG
SSBY
NMI interrupt
handler
NMIEG = 1
SSBY = 1
Software standby
mode (power-
down state)
Oscillator
settling time
(t
osc2
)
SLEEP
instruction
NMI exception
handling
Clock
oscillator
Figure 19.1 NMI Timing for Software Standby Mode (Example)
19.4.5
Note
The I/O ports retain their existing states in software standby mode. If a port is in the high output
state, its output current is not reduced.

568
19.5
Hardware Standby Mode
19.5.1
Transition to Hardware Standby Mode
Regardless of its current state, the chip enters hardware standby mode whenever the
STBY pin
goes low. Hardware standby mode reduces power consumption drastically by halting all functions
of the CPU, DMAC, DRAM interface, and on-chip supporting modules. All modules are reset
except the on-chip RAM. As long as the specified voltage is supplied, on-chip RAM data is
retained. I/O ports are placed in the high-impedance state.
Clear the RAME bit to 0 in SYSCR before
STBY goes low to retain on-chip RAM data.
The inputs at the mode pins (MD2 to MD0) should not be changed during hardware standby
mode.
19.5.2
Exit from Hardware Standby Mode
Hardware standby mode is exited by inputs at the
STBY and RES pins. While RES is low, when
STBY goes high, the clock oscillator starts running. RES should be held low long enough for the
clock oscillator to settle. When
RES goes high, reset exception handling begins, followed by a
transition to the program execution state.
19.5.3
Timing for Hardware Standby Mode
Figure 19.2 shows the timing relationships for hardware standby mode. To enter hardware standby
mode, first drive
RES low, then drive STBY low. To exit hardware standby mode, first drive
STBY high, wait for the clock to settle, then bring RES from low to high.
RES
STBY
Clock
oscillator
Oscillator
settling time
Reset
exception
handling
Figure 19.2 Hardware Standby Mode Timing

569
19.6
Module Standby Function
19.6.1
Module Standby Timing
The module standby function can halt several of the on-chip supporting modules (SCI2, SCI1,
SCI0, the DMAC, 16-bit timer, 8-bit timer, DRAM interface, and A/D converter) independently in
the power-down state. This standby function is controlled by bits MSTPH2 to MSTPH0 in
MSTCRH and bits MSTPL7 to MSTPL0 in MSTCRL. When one of these bits is set to 1, the
corresponding on-chip supporting module is placed in standby and halts at the beginning of the
next bus cycle after the MSTCR write cycle.
19.6.2
Read/Write in Module Standby
When an on-chip supporting module is in module standby, read/write access to its registers is
disabled. Read access always results in H'FF data. Write access is ignored.
19.6.3
Usage Notes
When using the module standby function, note the following points.
DMAC: When setting a bit in MSTCR to 1 to place the DMAC or DRAM interface in module
standby, make sure that the DMAC or DRAM interface is not currently requesting the bus right. If
the corresponding bit in MSTCR is set to 1 when a bus request is present, operation of the bus
arbiter becomes ambiguous and a malfunction may occur.
DRAM Interface: When the module standby function is used on the DRAM interface, set the
MSTCR bit to 1 while DRAM space is deselected.
Cancellation of Interrupt Handling: Before setting a module standby bit, first disable interrupts
by that module. When an on-chip supporting module is placed in standby by the module standby
function, its registers are initialized, including registers with interrupt request flags.
Pin States: Pins used by an on-chip supporting module lose their module functions when the
module is placed in module standby. What happens after that depends on the particular pin. For
details, see section 8, I/O Ports. Pins that change from the input to the output state require special
care. For example, if SCI1 is placed in module standby, the receive data pin loses its receive data
function and becomes a port pin. If its port DDR bit is set to 1, the pin becomes a data output pin,
and its output may collide with external SCI transmit data. Data collision should be prevented by
clearing the port DDR bit to 0 or taking other appropriate action.
Register Resetting: When an on-chip supporting module is halted by the module standby
function, all its registers are initialized. To restart the module, after its MSTCR bit is cleared to 0,
its registers must be set up again. It is not possible to write to the registers while the MSTCR bit is
set to 1.
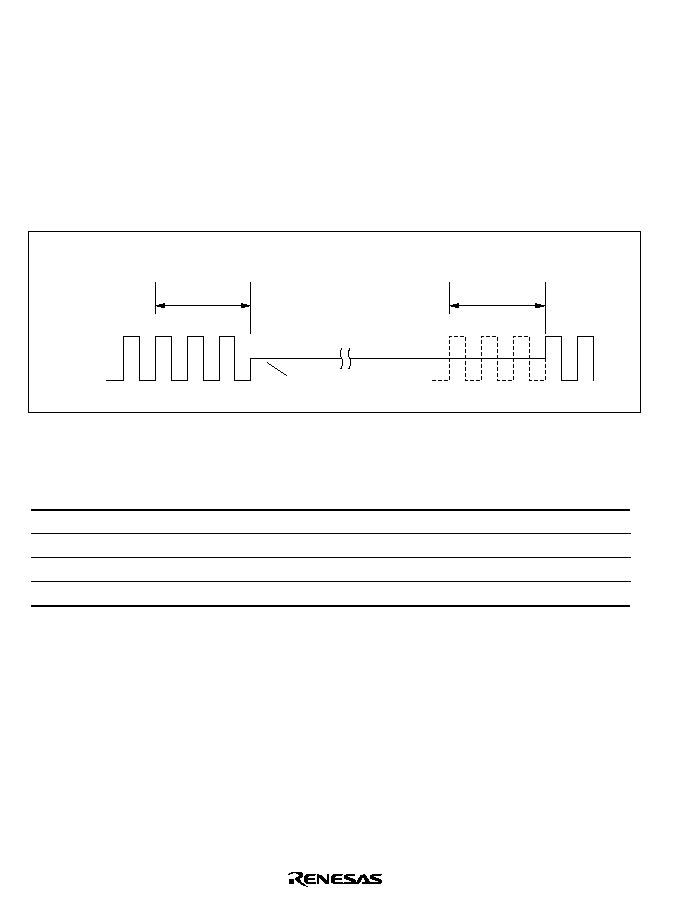
570
MSTCR Access from DMAC Disabled: To prevent malfunctions, MSTCR can only be accessed
from the CPU. It can be read by the DMAC, but it cannot be written by the DMAC.
19.7
System Clock Output Disabling Function
Output of the system clock (
) can be controlled by the PSTOP bit in MSTCRH. When the
PSTOP bit is set to 1, output of the system clock halts and the
pin is placed in the high-
impedance state. Figure 19.3 shows the timing of the stopping and starting of system clock output.
When the PSTOP bit is cleared to 0, output of the system clock is enabled. Table 19.4 indicates
the state of the
pin in various operating states.
T1
T2
(PSTOP = 1)
T3
T1
T2
(PSTOP = 0)
MSTCRH write cycle
MSTCRH write cycle
High impedance
pin
T3
Figure 19.3 Starting and Stopping of System Clock Output
Table 19.4
Pin State in Various Operating States
Operating State
PSTOP = 0
PSTOP = 1
Hardware standby
High impedance
High impedance
Software standby
Always high
High impedance
Sleep mode
System clock output
High impedance
Normal operation
System clock output
High impedance

571
Section 20 Electrical Characteristics
20.1
Absolute Maximum Ratings
Table 20.1 lists the absolute maximum ratings.
Table 20.1
Absolute Maximum Ratings
Item
Symbol
Value
Unit
Power supply voltage
V
CC
≠0.3 to +7.0
V
Input voltage (except for port 7)
V
in
≠0.3 to V
CC
+0.3
V
Input voltage (port 7)
V
in
≠0.3 to AV
CC
+0.3
V
Reference voltage
V
REF
≠0.3 to AV
CC
+0.3
V
Analog power supply voltage
AV
CC
≠0.3 to +7.0
V
Analog input voltage
V
AN
≠0.3 to AV
CC
+0.3
V
Operating temperature
T
opr
Regular specifications: ≠20 to +75
∞C
Wide-range specifications: ≠40 to +85
∞C
Storage temperature
T
stg
≠55 to +125
∞C
Caution: Permanent damage to the chip may result if absolute maximum ratings are exceeded.
572
20.2
Electrical Characteristics
20.2.1
DC Characteristics
Tables 20.2, 20.3 and 20.4 list the DC characteristics. Table 20.4 lists the permissible output
currents.
Table 20.2
DC Characteristics (1)
Conditions: V
CC
= 5.0 V ± 10%, AV
CC
= 5.0 V ± 10%, V
REF
= 4.5 V to AV
CC
*
1
,
V
SS
= AV
SS
= 0 V*
1
, T
a
= ≠20∞C to +75∞C (regular specifications),
T
a
= ≠40∞C to +85∞C (wide-range specifications)
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Schmitt
Port A,
V
T
≠
1.0
--
--
V
trigger input
P8
0
to P8
2
V
T
+
--
--
V
CC
◊
0.7
V
voltages
V
T
+
≠ V
T
≠
0.4
--
--
V
Input high
voltage
RES
,
STBY
,
NMI, MD
2
to
MD
0
V
IH
V
CC
≠ 0.7
--
V
CC
+ 0.3
V
EXTAL
V
CC
◊
0.7
--
V
CC
+ 0.3
V
Port 7
2.0
--
AV
CC
+ 0.3 V
Ports 4, 6,
P8
3
, P8
4
, P9
0
to P9
5
, port B,
D
15
to D
8
2.0
--
V
CC
+ 0.3
V
Input low
voltage
RES
,
STBY
,
MD
2
to MD
0
V
IL
≠0.3
--
0.5
V
NMI, EXTAL,
ports 4, 6, 7,
P8
3
, P8
4
, P9
0
to P9
5
, port B,
D
15
to D
8
≠0.3
--
0.8
V
Output high
All output pins
V
OH
V
CC
≠ 0.5
--
--
V
I
OH
= ≠200 µA
voltage
(except
RESO
)
3.5
--
--
V
I
OH
= ≠1 mA
Output low
voltage
All output pins
(except
RESO
)
V
OL
--
--
0.4
V
I
OL
= 1.6 mA
A
19
to A
0
--
--
1.0
V
I
OL
= 10 mA
RESO
--
--
0.4
V
I
OL
= 2.6 mA

573
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Input leakage
current
STBY
, NMI,
RES
,
MD
2
to MD
0
|I
in
|
--
--
1.0
µA
V
in
= 0.5 V to
V
CC
≠ 0.5 V
Port 7
--
--
1.0
µA
V
in
= 0.5 V to
AV
CC
≠ 0.5 V
Three-state
leakage
current
Ports 4, 6,
8 to B,
A
19
to A
0
,
D
15
to D
8
|I
TSI
|
--
--
1.0
µA
V
in
= 0.5 V to
V
CC
≠ 0.5 V
RESO
--
--
10.0
µA
V
in
= 0 V
Input pull-up
MOS current
Port 4
≠I
p
50
--
300
µA
V
in
= 0 V
Input
NMI
C
in
--
--
50
pF
V
in
= 0 V
capacitance
All input pins
except NMI
--
--
15
pF
f = 1 MHz
T
a
= 25∞C
Current
dissipation*
2
Normal
operation
I
CC
*
3
--
45
(5.0 V)
100
mA
f = 20 MHz
Sleep mode
--
35
(5.0 V)
73
mA
f = 20 MHz
Module
standby mode
--
18
(5.0 V)
51
mA
f = 20 MHz
Standby mode
--
0.01
5.0
µA
T
a
50∞C
--
--
20.0
µA
50∞C
T
a
Analog power
supply current
During A/D
conversion
AI
CC
--
0.6
1.5
mA
During A/D
and D/A
conversion
--
0.6
1.5
mA
Idle
--
0.01
5.0
µA
DASTE = 0
Reference
current
During A/D
conversion
AI
CC
--
0.5
0.8
mA
During A/D
and D/A
conversion
--
2.0
3.0
mA
Idle
--
0.01
5.0
µA
DASTE = 0
RAM standby voltage
V
RAM
2.0
--
--
V
Notes: 1. Do not open the pin connections of the AV
CC
, V
REF
and AV
SS
pins while the A/D converter
is not in use.
Connect the AV
CC
and V
REF
pins to the V
CC
and connect the AV
SS
pin to the V
SS
,
respectively.

574
2. Given current consumption values are when all the output pins are made to unloaded
state and, furthermore, when the on-chip pull-up MOS is turned off under conditions
that V
IH
min = V
CC
≠ 0.5 V and V
IL
max = 0.5 V.
Also, the aforesaid current consumption values are when V
IH
min = V
CC
◊
0.9 and V
IL
max = 0.3 V under the condition of V
RAM
V
CC
< 4.5 V.
3. I
CC
max. (under normal operations) = 1.0 (mA) + 0.90 (mA/(MHz
◊
V))
◊
V
CC
◊
f
I
CC
max. (when using the sleeve)
= 1.0 (mA) + 0.65 (mA/(MHz
◊
V))
◊
V
CC
◊
f
I
CC
max. (when the sleeve + module are standing by)
= 1.0 (mA) + 0.45 (mA/(MHz
◊
V))
◊
V
CC
◊
f
Also, the typ. values for current dissipation are reference values.
575
Table 20.3
DC Characteristics (2)
Conditions: V
CC
= 2.7 to 5.5 V, AV
CC
= 2.7 to 5.5 V, V
REF
= 2.7 V to AV
CC
*
1
,
V
SS
= AV
SS
= 0 V*
1
, T
a
= ≠20∞C to +75∞C (regular specifications),
T
a
= ≠40∞C to +85∞C (wide-range specifications)
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Schmitt
Port A,
V
T
≠
V
CC
◊
0.2
--
--
V
trigger input
P8
0
to P8
2
V
T
+
--
--
V
CC
◊
0.7
V
voltages
V
T
+
≠ V
T
≠
V
CC
◊
0.07 --
--
V
Input high
voltage
RES
,
STBY
,
NMI, MD
2
to
MD
0
V
IH
V
CC
◊
0.9
--
V
CC
+ 0.3
V
EXTAL
V
CC
◊
0.7
--
V
CC
+ 0.3
V
Port 7
V
CC
◊
0.7
--
AV
CC
+ 0.3 V
Ports 4, 6,
P8
3
, P8
4
, P9
0
to P9
5
, port B,
D
15
to D
8
V
CC
◊
0.7
--
V
CC
+ 0.3
V
Input low
voltage
RES
,
STBY
,
MD
2
to MD
0
V
IL
≠0.3
--
V
CC
◊
0.1
V
NMI, EXTAL,
≠0.3
--
V
CC
◊
0.2
V
V
CC
< 4.0 V
Ports 4, 6, 7,
P8
3
, P8
4
, P9
0
to P9
5
, port B,
D
15
to D
8
0.8
V
V
CC
= 4.0 to
5.5 V
Output high
voltage
All output pins
(except
RESO
)
V
OH
V
CC
≠ 0.5
--
--
V
I
OH
= ≠200 µA
V
CC
≠ 1.0
--
--
V
I
OH
= ≠1 mA
Output low
voltage
All output pins
(except
RESO
)
V
OL
--
--
0.4
V
I
OL
= 1.6 mA
A
19
to A
0
--
--
1.0
V
I
OL
= 5 mA
(V
CC
< 4.0 V)
I
OL
= 10 mA
(V
CC
= 4.0 to
5.5 V)
RESO
--
--
0.4
V
I
OL
= 1.6 mA
576
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Input leakage
current
STBY
, NMI,
RES
,
MD
2
to MD
0
|I
in
|
--
--
1.0
µA
V
in
= 0.5 V to
V
CC
≠ 0.5 V
Port 7
--
--
1.0
µA
V
in
= 0.5 V to
AV
CC
≠ 0.5 V
Three-state
leakage
current
Ports 4, 6,
8 to B,
A
19
to A
0
,
D
15
to D
8
|I
TSI
|
--
--
1.0
µA
V
in
= 0.5 V to
V
CC
≠ 0.5 V
RESO
--
--
10.0
µA
V
in
= 0 V
Input pull-up
MOS current
Port 4
≠I
p
10
--
300
µA
V
in
= 0 V
Input
NMI
C
in
--
--
50
pF
V
in
= 0 V
capacitance
All input pins
except NMI
--
--
15
pF
f = 1 MHz
T
a
= 25∞C
Current
dissipation*
2
Normal
operation
I
CC
*
3
--
15
(3.0 V)
51
mA
f = 10 MHz
Sleep mode
--
9
(3.0 V)
37
mA
f = 10 MHz
Module
standby mode
--
6
(3.0 V)
26
mA
f = 10 MHz
Standby mode
--
0.01
5.0
µA
T
a
50∞C
--
--
20.0
µA
50∞C
T
a
Analog power During A/D
AI
CC
--
0.2
0.5
mA
AV
CC
= 3.0 V
supply current conversion
--
0.6
--
mA
AV
CC
= 5.0 V
During A/D
--
0.2
0.5
mA
AV
CC
= 3.0 V
and D/A
conversion
--
0.6
--
mA
AV
CC
= 5.0 V
Idle
--
0.01
5.0
µA
DASTE = 0
Reference
During A/D
AI
CC
--
0.3
0.5
mA
V
REF
= 3.0 V
current
conversion
--
0.5
--
mA
V
REF
= 5.0 V
During A/D
--
1.2
2.0
mA
V
REF
= 3.0 V
and D/A
conversion
--
2.0
--
mA
V
REF
= 5.0 V
Idle
--
0.01
5.0
µA
DASTE = 0
RAM standby voltage
V
RAM
2.0
--
--
V
Notes: 1. Do not open the pin connections of the AV
CC
, V
REF
and AV
SS
pins while the A/D converter
is not in use.

577
Connect the AV
CC
and V
REF
pins to the V
CC
and connect the AV
SS
pin to the V
SS
,
respectively.
2. Given current consumption values are when all the output pins are made to unloaded
state and, furthermore, when the on-chip pull-up MOS is turned off under conditions
that V
IH
min = V
CC
≠ 0.5 V and V
IL
max = 0.5 V.
Also, the aforesaid current consumption values are when V
IH
min = V
CC
◊
0.9 and V
IL
max = 0.3 V under the condition of V
RAM
V
CC
< 2.7 V.
3. I
CC
max. (under normal operations) = 1.0 (mA) + 0.90 (mA/(MHz
◊
V))
◊
V
CC
◊
f
I
CC
max. (when using the sleeve)
= 1.0 (mA) + 0.65 (mA/(MHz
◊
V))
◊
V
CC
◊
f
I
CC
max. (when the sleeve + module are standing by)
= 1.0 (mA) + 0.45 (mA/(MHz
◊
V))
◊
V
CC
◊
f
Also, the typ. values for current dissipation are reference values.
578
Table 20.4
DC Characteristics (3)
Conditions: V
CC
= 3.0 to 5.5 V, AV
CC
= 3.0 to 5.5 V, V
REF
= 3.0 V to AV
CC
*
1
,
V
SS
= AV
SS
= 0 V*
1
, T
a
= ≠20∞C to +75∞C (regular specifications),
T
a
= ≠40∞C to +85∞C (wide-range specifications)
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Schmitt
Port A,
V
T
≠
V
CC
◊
0.2
--
--
V
trigger input
P8
0
to P8
2
V
T
+
--
--
V
CC
◊
0.7
V
voltages
V
T
+
≠ V
T
≠
V
CC
◊
0.07 --
--
V
Input high
voltage
RES
,
STBY
,
NMI, MD
2
to
MD
0
V
IH
V
CC
◊
0.9
--
V
CC
+ 0.3
V
EXTAL
V
CC
◊
0.7
--
V
CC
+ 0.3
V
Port 7
V
CC
◊
0.7
--
AV
CC
+ 0.3 V
Ports 4, 6,
P8
3
, P8
4
, P9
0
to P9
5
, Port B,
D
15
to D
8
V
CC
◊
0.7
--
V
CC
+ 0.3
V
Input low
voltage
RES
,
STBY
,
MD
2
to MD
0
V
IL
≠0.3
--
V
CC
◊
0.1
V
NMI, EXTAL,
≠0.3
--
V
CC
◊
0.2
V
V
CC
< 4.0 V
Ports 4, 6, 7,
P8
3
, P8
4
, P9
0
to P9
5
, Port B,
D
15
to D
8
0.8
V
V
CC
= 4.0 to
5.5 V
Output high
voltage
All output pins
(except
RESO
)
V
OH
V
CC
≠ 0.5
--
--
V
I
OH
= ≠200 µA
V
CC
≠ 1.0
--
--
V
I
OH
= ≠1 mA
Output low
voltage
All output pins
(except
RESO
)
V
OL
--
--
0.4
V
I
OL
= 1.6 mA
A
19
to A
0
--
--
1.0
V
I
OL
= 5 mA
(V
CC
< 4.0 V)
I
OL
= 10 mA
(V
CC
= 4.0 to
5.5 V)
RESO
--
--
0.4
V
I
OL
= 1.6 mA
579
Item
Symbol
Min
Typ
Max
Unit
Test Conditions
Input leakage
current
STBY
, NMI,
RES
,
MD
2
to MD
0
|I
in
|
--
--
1.0
µA
V
in
= 0.5 V to
V
CC
≠ 0.5 V
Port 7
--
--
1.0
µA
V
in
= 0.5 V to
AV
CC
≠ 0.5 V
Three-state
leakage
current
Ports 4, 6, 8 to
B, A
19
to A
0
,
D
15
to D
8
|I
TSI
|
--
--
1.0
µA
V
in
= 0.5 V to
V
CC
≠ 0.5 V
RESO
--
--
10.0
µA
V
in
= 0 V
Input pull-up
MOS current
Port 4
≠I
p
10
--
300
µA
V
in
= 0 V
Input
NMI
C
in
--
--
50
pF
V
in
= 0 V
capacitance
All input pins
except NMI
--
--
15
pF
f = 1 MHz
T
a
= 25∞C
Current
dissipation*
2
Normal
operation
I
CC
*
3
--
20
(3.5 V)
66
mA
f = 13 MHz
Sleep mode
--
15
(3.5 V)
48
mA
f = 13 MHz
Module
standby mode
--
9
(3.5 V)
34
mA
f = 13 MHz
Standby mode
--
0.01
5.0
µA
T
a
50∞C
--
--
20.0
µA
50∞C
T
a
Analog power During A/D
AI
CC
--
0.2
0.5
mA
AV
CC
= 3.0 V
supply current conversion
--
0.6
--
mA
AV
CC
= 5.0 V
During A/D
--
0.2
0.5
mA
AV
CC
= 3.0 V
and D/A
conversion
--
0.6
--
mA
AV
CC
= 5.0 V
Idle
--
0.01
5.0
µA
DASTE = 0
Reference
During A/D
AI
CC
--
0.3
0.5
mA
V
REF
= 3.0 V
current
conversion
--
0.5
--
mA
V
REF
= 5.0 V
During A/D
--
1.2
2.0
mA
V
REF
= 3.0 V
and D/A
conversion
--
2.0
--
mA
V
REF
= 5.0 V
Idle
--
0.01
5.0
µA
DASTE = 0
RAM standby voltage
V
RAM
2.0
--
--
V
Notes: 1. Do not open the pin connections of the AV
CC
, V
REF
and AV
SS
pins while the A/D converter
is not in use.
Connect the AV
CC
and V
REF
pins to the V
CC
and connect the AV
SS
pin to the V
SS
,
respectively.

580
2. Given current consumption values are when all the output pins are made to unloaded
state and, furthermore, when the on-chip pull-up MOS is turned off under conditions
that V
IH
min = V
CC
≠ 0.5 V and V
IL
max = 0.5 V.
Also, the aforesaid current consumption values are when V
IH
min = V
CC
◊
0.9 and V
IL
max = 0.3 V under the condition of V
RAM
V
CC
< 3.0 V.
3. I
CC
max. (under normal operations) = 1.0 (mA) + 0.90 (mA/(MHz
◊
V))
◊
V
CC
◊
f
I
CC
max. (when using the sleeve)
= 1.0 (mA) + 0.65 (mA/(MHz
◊
V))
◊
V
CC
◊
f
I
CC
max. (when the sleeve + module are standing by)
= 1.0 (mA) + 0.45 (mA/(MHz
◊
V))
◊
V
CC
◊
f
Also, the typ. values for current dissipation are reference values.

581
Table 20.5
Permissible Output Currents
Conditions: V
CC
= 2.7 V to 5.5 V, AV
CC
= 2.7 V to 5.5 V, V
REF
= 2.7 V to AV
CC
,
V
SS
= AV
SS
= 0 V, T
a
= ≠20∞C to +75∞C (regular specifications),
T
a
= ≠40∞C to +85∞C (wide-range specifications)
Item
Symbol
Min
Typ
Max
Unit
Permissible output
A
19
to A
0
I
OL
--
--
10
mA
low current (per pin)
Other output pins
--
--
2.0
mA
Permissible output
low current (total)
Total of 20 pins in
A
19
to A
0
I
OL
--
--
80
mA
Total of all output pins,
including the above
--
--
120
mA
Permissible output
high current (per pin)
All output pins
|≠I
OH
|
--
--
2.0
mA
Permissible output
high current (total)
Total of all output pins
|
≠I
OH
|
--
--
40
mA
Notes: 1. To protect chip reliability, do not exceed the output current values in table 20.5.
2. When driving a darlington pair, always insert a current-limiting resistor in the output line,
as shown in figures 20.1.
H8/3006 and H8/3007
Port
2 k
Darlington pair
Figure 20.1 Darlington Pair Drive Circuit (Example)

582
20.2.2
AC Characteristics
Clock timing parameters are listed in table 20.6, control signal timing parameters in table 20.7,
and bus timing parameters in table 20.8. Timing parameters of the on-chip supporting modules are
listed in table 20.9.
Table 20.6
Clock Timing
Condition: T
a
= ≠20∞C to +75∞C (regular specifications), T
a
= ≠40∞C to +85∞C (wide-range
specifications)
Condition A: V
CC
= 2.7 to 5.5 V, AV
CC
= 2.7 to 5.5 V, V
REF
= 2.7 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 10 MHz
Condition B: V
CC
= 3.0 to 5.5 V, AV
CC
= 3.0 to 5.5 V, V
REF
= 3.0 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 13 MHz
Condition C: V
CC
= 5.0 V ± 10%, AV
CC
= 5.0 V ± 10%, V
REF
= 4.5 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 20 MHz
Condition
A
B
C
Test
Item
Symbol
Min
Max
Min
Max
Min
Max
Unit
Conditions
Clock cycle time
t
cyc
100
1000
76.9
1000
50
1000
ns
Figure 20.3
Clock pulse low
width
t
CL
30
--
20
--
15
--
ns
Clock pulse high
width
t
CH
30
--
20
--
15
--
ns
Clock rise time
t
Cr
--
20
--
15
--
10
ns
Clock fall time
t
Cf
--
20
--
15
--
10
ns
Clock oscillator
settling time at
reset
t
OSC1
20
--
20
--
20
--
ms
Figure 20.4
Clock oscillator
settling time in
software standby
t
OSC2
7
--
7
--
7
--
ms
Figure 19.1
583
Table 20.7
Control Signal Timing
Condition: T
a
= ≠20∞C to +75∞C (regular specifications), T
a
= ≠40∞C to +85∞C (wide-range
specifications)
Condition A: V
CC
= 2.7 to 5.5 V, AV
CC
= 2.7 to 5.5 V, V
REF
= 2.7 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 10 MHz
Condition B: V
CC
= 3.0 to 5.5 V, AV
CC
= 3.0 to 5.5 V, V
REF
= 3.0 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 13 MHz
Condition C: V
CC
= 5.0 V ± 10%, AV
CC
= 5.0 V ± 10%, V
REF
= 4.5 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 20 MHz
Condition
A
B
C
Test
Item
Symbol
Min
Max
Min
Max
Min
Max
Unit
Conditions
RES
setup time
t
RESS
200
--
200
--
150
--
ns
Figure 20.5
RES
pulse width
t
RESW
10
--
10
--
10
--
t
cyc
Mode programming
setup time
t
MDS
200
--
200
--
200
--
ns
RESO
output delay
time
t
RESD
--
100
--
100
--
50
ns
Figure 20.6
RESO
output pulse
width
t
RESOW
132
--
132
--
132
--
t
cyc
NMI,
IRQ
setup time
t
NMIS
200
--
200
--
150
--
ns
Figure 20.7
NMI,
IRQ
hold time
t
NMIH
10
--
10
--
10
--
ns
NMI,
IRQ
pulse width
t
NMIW
200
--
200
--
200
--
ns

584
Table 20.8
Bus Timing
Condition: T
a
= ≠20∞C to +75∞C (regular specifications), T
a
= ≠40∞C to +85∞C (wide-range
specifications)
Condition A: V
CC
= 2.7 to 5.5 V, AV
CC
= 2.7 to 5.5 V, V
REF
= 2.7 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 10 MHz
Condition B: V
CC
= 3.0 to 5.5 V, AV
CC
= 3.0 to 5.5 V, V
REF
= 3.0 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 13 MHz
Condition C: V
CC
= 5.0 V ± 10%, AV
CC
= 5.0 V ± 10%, V
REF
= 4.5 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 20 MHz
Condition
A
B
C
Test
Item
Symbol Min
Max
Min
Max
Min
Max
Unit Conditions
Address delay
time
t
AD
--
50
--
40
--
25
ns
Figure 20.8,
figure 20.9,
Address hold
time
t
AH
0.5 t
cyc
≠ 45
--
0.5 t
cyc
≠ 35
--
0.5 t
cyc
≠ 20
--
ns
figure 20.11,
figure 20.12
Read strobe
delay time
t
RSD
--
60
--
50
--
25
ns
Address strobe
delay time
t
ASD
--
60
--
50
--
25
ns
Write strobe
delay time
t
WSD
--
60
--
50
--
25
ns
Strobe delay time t
SD
--
60
--
50
--
25
ns
Write strobe
pulse width 1
t
WSW1
1.0 t
cyc
≠ 50
--
1.0 t
cyc
≠ 40
--
1.0 t
cyc
≠ 25
--
ns
Write strobe
pulse width 2
t
WSW2
1.5 t
cyc
≠ 50
--
1.5 t
cyc
≠ 40
--
1.5 t
cyc
≠ 25
--
ns
Address setup
time 1
t
AS1
0.5 t
cyc
≠ 45
--
0.5 t
cyc
≠ 35
--
0.5 t
cyc
≠ 20
--
ns
Address setup
time 2
t
AS2
1.0 t
cyc
≠ 45
--
1.0 t
cyc
≠ 35
--
1.0 t
cyc
≠ 20
--
ns
Read data setup
time
t
RDS
50
--
40
--
25
--
ns
Read data hold
time
t
RDH
0
--
0
--
0
--
ns
Write data delay
time
t
WDD
--
60
--
50
--
35
ns

585
Condition
A
B
C
Test
Item
Symbol Min
Max
Min
Max
Min
Max
Unit Conditions
Write data setup
time 1
t
WDS1
1.0 t
cyc
≠ 50
--
1.0 t
cyc
≠ 40
--
1.0 t
cyc
≠ 30
--
ns
Figure 20.8,
figure 20.9,
Write data setup
time 2
t
WDS2
2.0 t
cyc
≠ 50
--
2.0 t
cyc
≠ 40
--
2.0 t
cyc
≠ 30
--
ns
figure 20.11,
figure 20.12
Write data hold
time
t
WDH
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 25
--
0.5 t
cyc
≠ 15
--
ns
Read data
access time 1
t
ACC1
--
2.0 t
cyc
≠ 100
--
2.0 t
cyc
≠ 80
--
2.0 t
cyc
≠ 45
ns
Read data
access time 2
t
ACC2
--
3.0 t
cyc
≠ 100
--
3.0 t
cyc
≠ 80
--
3.0 t
cyc
≠ 45
ns
Read data
access time 3
t
ACC3
--
1.5 t
cyc
≠ 100
--
1.5 t
cyc
≠ 80
--
1.5 t
cyc
≠ 45
ns
Read data
access time 4
t
ACC4
--
2.5 t
cyc
≠ 100
--
2.5 t
cyc
≠ 80
--
2.5 t
cyc
≠ 45
ns
Precharge time 1 t
PCH1
1.0 t
cyc
≠ 40
--
1.0 t
cyc
≠ 30
--
1.0 t
cyc
≠ 20
--
ns
Precharge time 2 t
PCH2
0.5 t
cyc
≠ 40
--
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 20
--
ns
Wait setup time
t
WTS
40
--
40
--
25
--
ns
Figure 20.10
Wait hold time
t
WTH
5
--
5
--
5
--
ns
Bus request
setup time
t
BRQS
40
--
40
--
25
--
ns
Figure 20.13
Bus acknowledge
delay time 1
t
BACD1
--
60
--
50
--
30
ns
Bus acknowledge
delay time 2
t
BACD2
--
60
--
50
--
30
ns
Bus-floating time t
BZD
--
60
--
50
--
30
ns
RAS
precharge
time
t
RP
1.5 t
cyc
≠ 50
--
1.5 t
cyc
≠ 40
--
1.5 t
cyc
≠ 25
--
ns
Figure 20.14
to
CAS
precharge
time
t
CP
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 25
--
0.5 t
cyc
≠ 15
--
ns
figure 20.16
Low address hold
time
t
RAH
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 25
--
0.5 t
cyc
≠ 15
--
ns
RAS
delay time 1 t
RAD1
--
60
--
50
--
25
ns
RAS
delay time 2 t
RAD2
--
60
--
50
--
30
ns
586
Condition
A
B
C
Test
Item
Symbol Min
Max
Min
Max
Min
Max
Unit Conditions
CAS
delay time 1 t
CASD1
--
60
--
50
--
25
ns
Figure 20.14
to
CAS
delay time 2 t
CASD2
--
60
--
50
--
25
ns
figure 20.16
WE
delay time
t
WCD
--
60
--
50
--
25
ns
CAS
pulse width
1
t
CAS1
1.5 t
cyc
≠ 50
--
1.5 t
cyc
≠ 40
--
1.5 t
cyc
≠ 20
--
ns
CAS
pulse width
2
t
CAS2
1.0 t
cyc
≠ 50
--
1.0 t
cyc
≠ 40
--
1.0 t
cyc
≠ 20
--
ns
CAS
pulse width
3
t
CAS3
1.0 t
cyc
≠ 50
--
1.0 t
cyc
≠ 40
--
1.0 t
cyc
≠ 20
--
ns
RAS
access time t
RAC
--
2.5 t
cyc
≠ 80
--
2.5 t
cyc
≠ 70
--
2.5 t
cyc
≠ 40
ns
Address access
time
t
AA
--
2.0 t
cyc
≠ 100
--
2.0 t
cyc
≠ 80
--
2.0 t
cyc
≠ 50
ns
CAS
access time t
CAC
--
1.5 t
cyc
≠ 100
--
1.5 t
cyc
≠ 80
--
1.5 t
cyc
≠ 50
ns
WE
setup time
t
WCS
0.5 t
cyc
≠ 45
--
0.5 t
cyc
≠ 35
--
0.5 t
cyc
≠ 20
--
ns
WE
hold time
t
WCH
0.5 t
cyc
≠ 40
--
0.5 t
cyc
≠ 28
--
0.5 t
cyc
≠ 15
--
ns
Write data setup
time
t
WDS
0.5 t
cyc
≠ 45
--
0.5 t
cyc
≠ 35
--
0.5 t
cyc
≠ 20
--
ns
WE
write data
hold time
t
WDH
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 25
--
0.5 t
cyc
≠ 15
--
ns
CAS
setup time 1 t
CSR1
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 25
--
0.5 t
cyc
≠ 20
--
ns
CAS
setup time 2 t
CSR2
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 25
--
0.5 t
cyc
≠ 15
--
ns
CAS
hold time
t
CHR
0.5 t
cyc
≠ 30
--
0.5 t
cyc
≠ 25
--
0.5 t
cyc
≠ 15
--
ns
RAS
pulse width
t
RAS
1.5 t
cyc
≠ 30
--
1.5 t
cyc
≠ 25
--
1.5 t
cyc
≠ 15
--
ns
587
Table 20.9
Timing of On-Chip Supporting Modules
Condition: T
a
= ≠20∞C to +75∞C (regular specifications), T
a
= ≠40∞C to +85∞C (wide-range
specifications)
Condition A: V
CC
= 2.7 to 5.5 V, AV
CC
= 2.7 to 5.5 V, V
REF
= 2.7 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 10 MHz
Condition B: V
CC
= 3.0 to 5.5 V, AV
CC
= 3.0 to 5.5 V, V
REF
= 3.0 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 13 MHz
Condition C: V
CC
= 5.0 V ± 10%, AV
CC
= 5.0 V ± 10%, V
REF
= 4.5 to AV
CC
, V
SS
= AV
SS
= 0 V,
= 1 to 20 MHz
Condition
A
B
C
Test
Item
Symbol
Min
Max
Min
Max
Min
Max
Unit
Conditions
Ports
and
Output data delay
time
t
PWD
--
100
--
100
--
50
ns
Figure 20.17
TPC
Input data setup
time
t
PRS
50
--
50
--
50
--
ns
Input data hold
time
t
PRH
50
--
50
--
50
--
ns
16-bit
timer
Timer output
delay time
t
TOCD
--
100
--
100
--
50
ns
Figure 20.18
Timer input setup
time
t
TICS
50
--
50
--
50
--
ns
Timer clock input
setup time
t
TCKS
50
--
50
--
50
--
ns
Figure 20.19
Timer
clock
Single
edge
t
TCKWH
1.5
--
1.5
--
1.5
--
t
cyc
pulse
width
Both
edges
t
TCKWL
2.5
--
2.5
--
2.5
--
t
cyc
8-bit
timer
Timer output
delay time
t
TOCD
--
100
--
100
--
50
ns
Figure 20.18
Timer input
setup time
t
TICS
50
--
50
--
50
--
ns
Timer clock
input setup time
t
TCKS
50
--
50
--
50
--
ns
Figure 20.19
Timer
clock
Single
edge
t
TCKWH
1.5
--
1.5
--
1.5
--
t
cyc
pulse
width
Both
edges
t
TCKWL
2.5
--
2.5
--
2.5
--
t
cyc
588
Condition
A
B
C
Test
Item
Symbol
Min
Max
Min
Max
Min
Max
Unit
Conditions
SCI
Input
clock
Asyn-
chronous
t
Scyc
4
--
4
--
4
--
t
cyc
Figure 20.20
cycle
Syn-
chronous
6
--
6
--
6
--
t
cyc
Input clock rise
time
t
SCKr
1.5
--
1.5
--
1.5
--
t
cyc
Input clock fall
time
t
SCKf
1.5
--
1.5
--
1.5
--
t
c yc
Input clock
pulse width
t
SCKW
0.4
0.6
0.4
0.6
0.4
0.6
t
Scyc
Transmit data
delay time
t
TXD
--
100
--
100
--
100
ns
Figure 20.21
Receive data
setup time
(synchronous)
t
RXS
100
--
100
--
100
--
ns
Receive
data hold
Clock
input
t
RXH
100
--
100
--
100
--
ns
time (syn-
chronous)
Clock
output
0
--
0
--
0
--
ns
DMAC
TEND
delay
time 1
t
TED1
--
100
--
100
--
50
ns
Figure 20.22,
figure 20.23
TEND
delay
time 2
t
TED2
--
100
--
100
--
50
ns
DREQ
setup
time
t
DRQS
40
--
40
--
25
--
ns
Figure 20.24
DREQ
hold
time
t
DRQH
10
--
10
--
10
--
ns

589
C
R
H
R
L
H8/3006 and
H8/3007
output pin
C = 90 pF: Ports 4, 6, 8, A
19
to A
0
,
D
15
to D
8
C = 30 pF: Ports 9, A, B,
RESO
Input/output timing measurement levels
∑ Low: 0.8 V
∑ High: 2.0 V
R = 2.4 k
R = 12 k
L
H
Figure 20.2 Output Load Circuit
590
20.2.3
A/D Conversion Characteristics
Table 20.10 lists the A/D conversion characteristics.
Table 20.10 A/D Conversion Characteristics
Condition: T
a
= ≠20∞C to +75∞C (regular specifications), T
a
= ≠40∞C to +85∞C (wide-range
specifications)
Condition A: V
CC
= 2.7 to 5.5 V, AV
CC
= 2.7 to 5.5 V, V
REF
= 2.7 to AV
CC
, V
SS
= AV
SS
= 0 V,
fmax = 10 MHz
Condition B: V
CC
= 3.0 to 5.5 V, AV
CC
= 3.0 to 5.5 V, V
REF
= 3.0 to AV
CC
, V
SS
= AV
SS
= 0 V,
fmax = 13 MHz
Condition C: V
CC
= 5.0 V ± 10%, AV
CC
= 5.0 V ± 10%, V
REF
= 4.5 to AV
CC
, V
SS
= AV
SS
= 0 V,
fmax = 20 MHz
Condition
A
B
C
Item
Min Typ Max
Min Typ Max
Min Typ Max
Unit
Conver-
Resolution
10
10
10
10
10
10
10
10
10
bits
sion time:
134 states
Conversion time (single
mode)
--
--
134
--
--
134
--
--
134
t
cyc
Analog input capacitance
--
--
20
--
--
20
--
--
20
pF
Permissible
13 MHz
--
--
--
--
--
--
--
--
10
k
signal-source
> 13 MHz
--
--
--
--
--
--
--
--
5
k
impedance
4.0 V
AV
CC
5.5 V
--
--
10
--
--
10
--
--
--
k
2.7 V
AV
CC
< 4.0 V
--
--
5
--
--
5
--
--
--
k
Nonlinearity error
--
--
±7.5
--
--
±7.5
--
--
±3.5
LSB
Offset error
--
--
±7.5
--
--
±7.5
--
--
±3.5
LSB
Full-scale error
--
--
±7.5
--
--
±7.5
--
--
±3.5
LSB
Quantization error
--
--
±0.5
--
--
±0.5
--
--
±0.5
LSB
Absolute accuracy
--
--
±8.0
--
--
±8.0
--
--
±4.0
LSB
591
Condition
A
B
C
Item
Min Typ Max
Min Typ Max
Min Typ Max
Unit
Conver-
Resolution
10
10
10
10
10
10
10
10
10
bits
sion time:
70 states
Conversion time (single
mode)
--
--
70
--
--
70
--
--
70
t
cyc
Analog input capacitance
--
--
20
--
--
20
--
--
20
pF
Permissible
13 MHz
--
--
--
--
--
--
--
--
5
k
signal-source
> 13 MHz
--
--
--
--
--
--
--
--
3
k
impedance
4.0 V
AV
CC
5.5 V
--
--
5
--
--
5
--
--
--
k
2.7 V
AV
CC
< 4.0 V
--
--
3
--
--
3
--
--
--
k
Nonlinearity error
--
--
±15.5 --
--
±15.5 --
--
±7.5
LSB
Offset error
--
--
±15.5 --
--
±15.5 --
--
±7.5
LSB
Full-scale error
--
--
±15.5 --
--
±15.5 --
--
±7.5
LSB
Quantization error
--
--
±0.5
--
--
±0.5
--
--
±0.5
LSB
Absolute accuracy
--
--
±16
--
--
±16
--
--
±8.0
LSB
592
20.2.4
D/A Conversion Characteristics
Table 20.11 lists the D/A conversion characteristics.
Table 20.11 D/A Conversion Characteristics
Condition: T
a
= ≠20∞C to +75∞C (regular specifications), T
a
= ≠40∞C to +85∞C (wide-range
specifications)
Condition A: V
CC
= 2.7 to 5.5 V, AV
CC
= 2.7 to 5.5 V, V
REF
= 2.7 to AV
CC
, V
SS
= AV
SS
= 0 V,
fmax = 10 MHz
Condition B: V
CC
= 3.0 to 5.5 V, AV
CC
= 3.0 to 5.5 V, V
REF
= 3.0 to AV
CC
, V
SS
= AV
SS
= 0 V,
fmax = 13 MHz
Condition C: V
CC
= 5.0 V ± 10%, AV
CC
= 5.0 V ± 10%, V
REF
= 4.5 to AV
CC
, V
SS
= AV
SS
= 0 V,
fmax = 20 MHz
Condition
A
B
C
Test
Item
Min Typ Max
Min Typ Max
Min Typ Max
Unit Conditions
Resolution
8
8
8
8
8
8
8
8
8
Bits
Conversion time
(centering time)
--
--
10
--
--
10
--
--
10
µs
20 pF
capacitive
load
Absolute accuracy
--
±2.0 ±3.0
--
±2.0 ±3.0
--
±1.5 ±2.0
LSB 2 M
resistive load
--
--
±2.0
--
--
±2.0
--
--
±1.5
LSB 4 M
resistive load

593
20.3
Operational Timing
This section shows timing diagrams.
20.3.1
Clock Timing
Clock timing is shown as follows:
∑
System clock timing
Figure 20.3 shows the system clock timing.
∑
Oscillator settling timing
Figure 20.4 shows the oscillator settling timing.
t
Cr
t
CL
t
Cf
t
CH
t
cyc
Figure 20.3 System Clock Timing
V
CC
STBY
RES
t
OSC1
t
OSC1
Figure 20.4 Oscillator Settling Timing

594
20.3.2
Control Signal Timing
Control signal timing is shown as follows:
∑
Reset input timing
Figure 20.5 shows the reset input timing.
∑
Reset output timing
Figure 20.6 shows the reset output timing.
∑
Interrupt input timing
Figure 20.7 shows the interrupt input timing for NMI and
IRQ
5
to
IRQ
0
.
t
RESS
t
RESS
t
RESW
t
MDS
RES
MD
2
to MD
0
Figure 20.5 Reset Input Timing
RESO
t
RESD
t
RESOW
t
RESD
Figure 20.6 Reset Output Timing
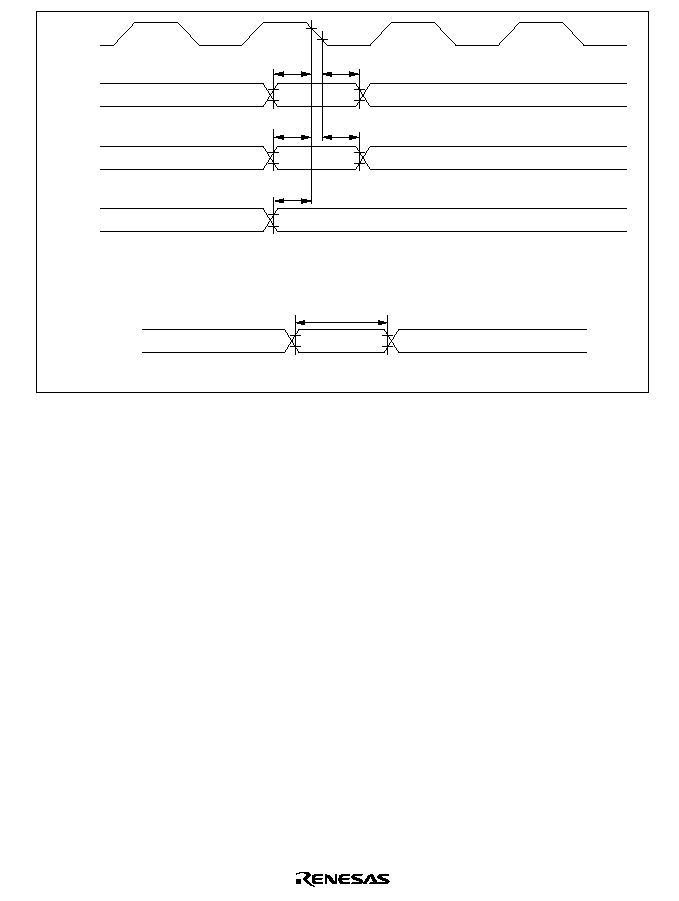
595
NMI
IRQ
IRQ
E
L
t
NMIS
t
NMIH
t
NMIS
t
NMIH
t
NMIS
t
NMIW
NMI
IRQ
j
IRQ
: Edge-sensitive
IRQ
: Level-sensitive
IRQ
(i = 0 to 5)
E
L
i
i
IRQ
(j = 0 to 5)
Figure 20.7 Interrupt Input Timing

596
20.3.3
Bus Timing
Bus timing is shown as follows:
∑
Basic bus cycle: two-state access
Figure 20.8 shows the timing of the external two-state access cycle.
∑
Basic bus cycle: three-state access
Figure 20.9 shows the timing of the external three-state access cycle.
∑
Basic bus cycle: three-state access with one wait state
Figure 20.10 shows the timing of the external three-state access cycle with one wait state
inserted.
∑
Burst ROM access timing: burst cycle two-state
Figure 20.11 shows the timing of the burst cycle two-state access.
∑
Burst ROM access timing: burst cycle three-state
Figure 20.12 shows the timing of the burst cycle three-state access.
∑
Bus-release mode timing
Figure 20.13 shows the bus-release mode timing.

597
T
1
T
2
t
CH
t
AD
t
CL
t
Cr
t
Cf
t
ASD
t
ACC3
t
AS1
t
cyc
t
cyc
t
SD
t
RDS
t
AH
t
PCH1
t
PCH2
t
RDH
*
t
PCH1
t
SD
t
AH
t
ASD
t
ACC3
t
AS1
t
ACC1
t
ASD
t
AS1
t
WSW1
t
WDS1
t
WDH
t
WDD
A
23
to A
0
,
CS
n
AS
RD
(read)
D
15
to D
0
(read)
HWR
,
LWR
(write)
D
15
to D
0
(write)
Note:
*
Specification from the earliest negation timing of A
23
to A
0
,
CSn
, and
RD
.
t
RSD
Figure 20.8 Basic Bus Cycle: Two-State Access

598
T
1
T
2
T
3
t
ACC4
t
ACC4
t
AS2
t
WDD
t
WDS2
t
WSW2
t
WSD
t
ACC2
t
RDS
A
23
to A
0
,
CS
n
AS
RD
(read)
D
15
to D
0
(read)
HWR, LWR
(write)
D
15
to D
0
(write)
Figure 20.9 Basic Bus Cycle: Three-State Access
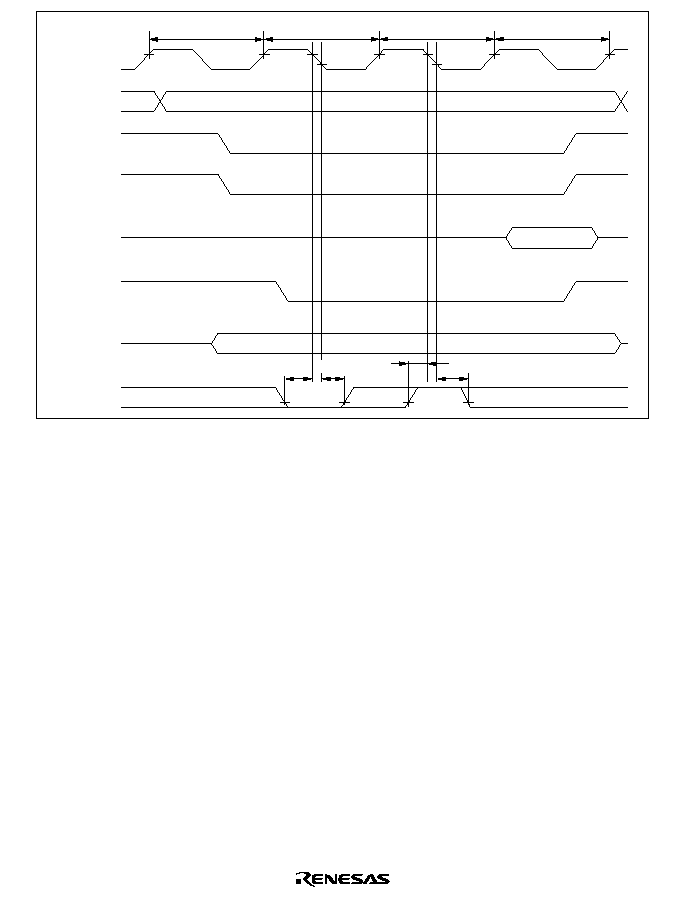
599
T
1
T
2
T
W
T
3
t
WTS
t
WTS
t
WTH
AS
RD
(read)
D
15
to D
0
(read)
HWR
,
LWR
(write)
D
15
to D
0
(write)
WAIT
t
WTH
A
23
to A
0
,
CS
n
Figure 20.10 Basic Bus Cycle: Three-State Access with One Wait State

600
t
AD
t
ASD
t
AS1
t
ACC4
t
RDS
t
RDS
T
3
T
1
T
2
T
2
T
1
t
ASD
t
SD
t
AH
t
AS1
t
AH
t
SD
t
ASD
t
AS1
t
ACC4
t
ACC2
t
RSD
t
RDH
*
t
ACC1
t
AD
A
23
to A
3
CSn
A
2
to A
0
AS
RD
D
15
to D
0
Note:
*
Specification from the earliest negation timing of A
23
to A
0
,
CSn
, and
RD
.
Figure 20.11 Burst ROM Access Timing: Two-State Access
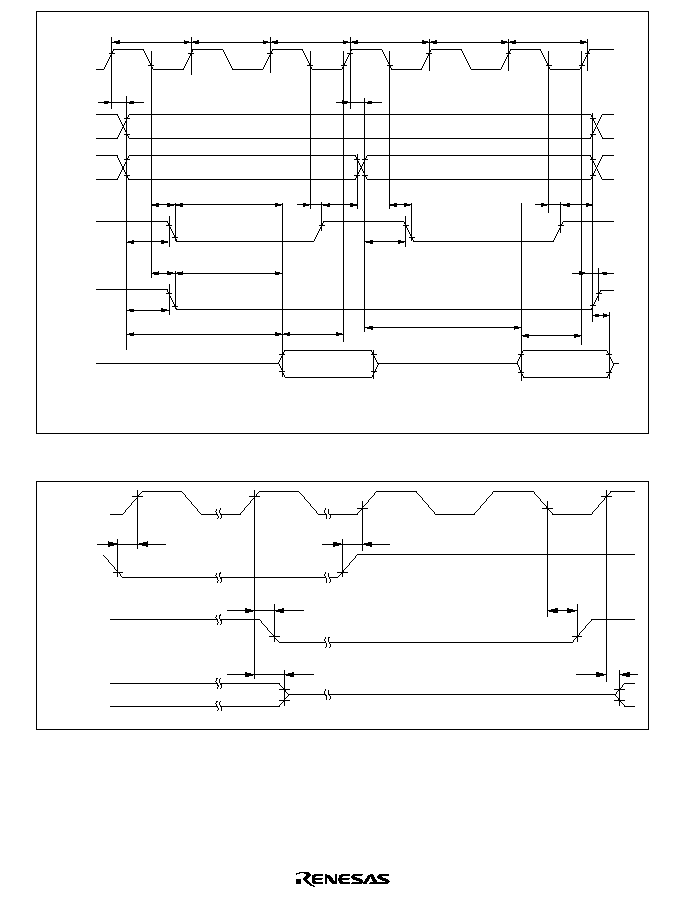
601
t
AD
t
ASD
t
AS1
t
ACC4
t
RDS
t
RDS
T
3
T
1
T
2
T
3
T
2
T
1
t
ASD
t
SD
t
AH
t
AS1
t
AH
t
SD
t
ASD
t
AS1
t
ACC4
t
ACC2
t
RSD
t
RDH
*
t
ACC2
t
AD
A
23
to A
3
CSn
A
2
to A
0
AS
RD
D
15
to D
0
Note:
*
Specification from the earliest negation timing of A
23
to A
0
,
CSn
, and
RD
.
Figure 20.12 Burst ROM Access Timing: Three-State Access
BREQ
BACK
A
23
to A
0
,
AS
,
RD
,
HWR
,
LWR
t
BRQS
t
BRQS
t
BACD1
t
BZD
t
BACD2
t
BZD
Figure 20.13 Bus-Release Mode Timing

602
20.3.4
DRAM Interface Bus Timing
DRAM interface bus timing is shown as follows:
∑
DRAM bus timing: read and write access
Figure 20.14 shows the timing of the read and write access.
∑
DRAM bus timing: CAS before RAS refresh
Figure 20.15 shows the timing of the CAS before RAS refresh.
∑
DRAM bus timing: self-refresh
Figure 20.16 shows the timing of the self-refresh.
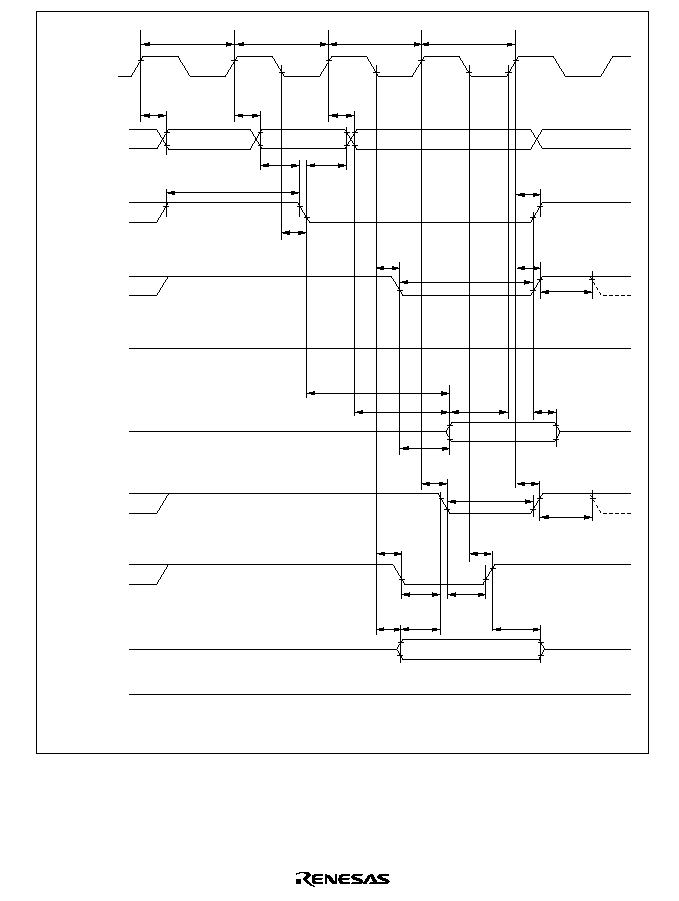
603
T
p
t
AD
T
r
T
C1
T
C2
t
RP
t
AD
t
AS1
t
RAD1
t
RAD2
t
CASD2
t
CP
t
ASD
t
CAS1
t
RDH*
t
CASD2
t
CAS2
t
CP
t
CASD1
t
CAC
t
RDS
t
RAC
t
AA
t
RAH
t
AD
t
WCD
t
WCH
t
WCS
t
WDD
t
WDS
t
WDH
t
ASD
A
23
to A
0
CS
5
to
CS
2
(
RAS
5
to
RAS
2
)
UCAS
,
LCAS
(read)
RD
(
WE
)
(read)
(High)
(High)
UCAS
,
LCAS
(write)
RD
(
WE
)
(write)
D
15
to D
0
(read)
D
15
to D
0
(write)
RFSH
Note: * Specification from the earliest negation timing of
RAS
and
CAS
.
Figure 20.14 DRAM Bus Timing (Read/Write)

604
TR
p
TR
1
TR
2
t
RP
t
RAD1
t
CASD1
t
CASD2
t
RAD2
t
RAS
CS
5
to
CS
2
(
RAS
5
to
RAS
2
)
UCAS
,
LCAS
RD
(
WE
)
(High)
RFSH
t
CSR1
t
RAD1
t
CSR1
t
CHR
t
RAS
t
RAD2
t
CHR
t
CAS3
Figure 20.15 DRAM Bus Timing (CAS Before RAS Refresh)
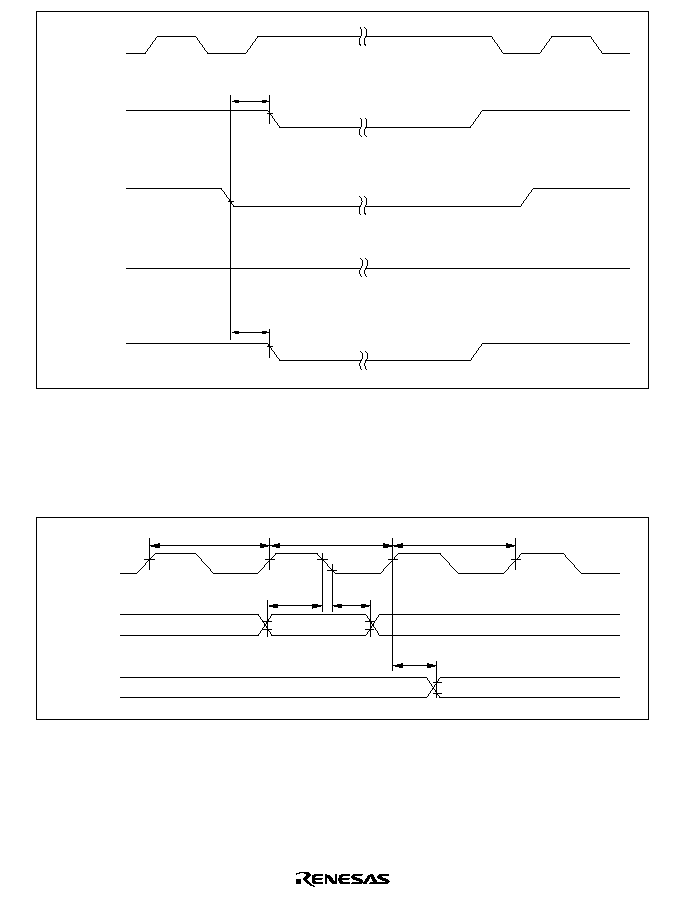
605
t
CSR2
t
CSR2
CS
5
to
CS
2
(
RAS
5
to
RAS
2
)
UCAS
,
LCAS
RD
(
WE
)
(High)
RFSH
Figure 20.16 DRAM Bus Timing (Self-Refresh)
20.3.5
TPC and I/O Port Timing
Figure 20.17 shows the TPC and I/O port input/output timing.
T
1
T
2
T
3
Port 4,
6 to B
(read)
Port 4, 6,
8 to B
(write)
t
PRS
t
PRH
t
PWD
Figure 20.17 TPC and I/O Port Input/Output Timing
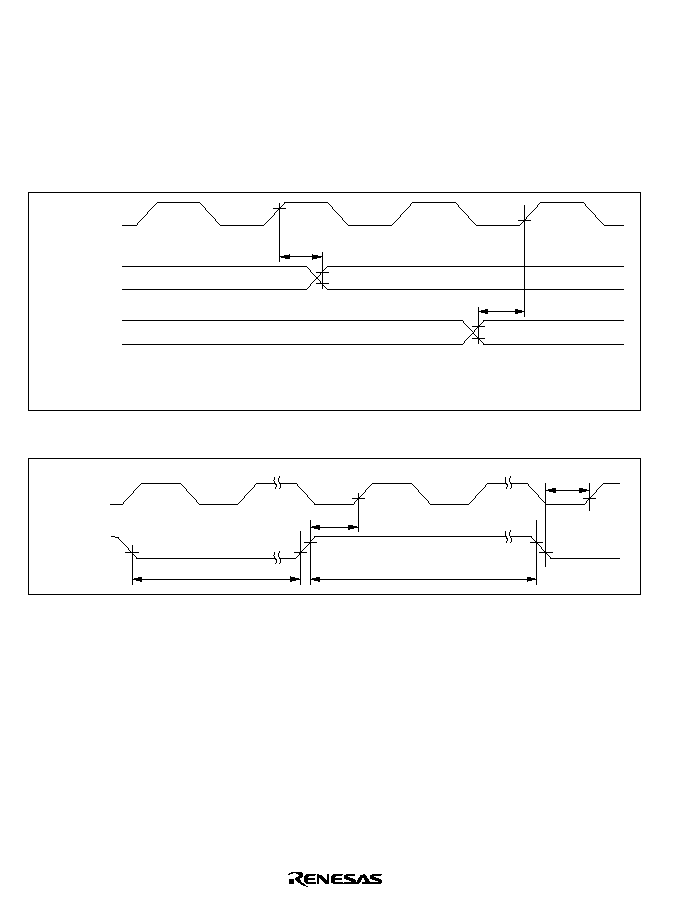
606
20.3.6
Timer Input/Output Timing
ITU timing is shown as follows:
∑
Timer input/output timing
Figure 20.18 shows the timer input/output timing.
∑
Timer external clock input timing
Figure 20.19 shows the timer external clock input timing.
Output
compare
* 1
Input
capture
* 2
t
TOCD
t
TICS
Notes: 1. TIOCA to TIOCA , TIOCB to TIOCB , TMO
0
, TMO
2
, TMIO
1
,TMIO
3
2. TIOCA to TIOCA , TIOCB to TIOCB , TMIO
1
, TMIO
3
0
2
0
2
0
2
0
2
Figure 20.18 Timer Input/Output Timing
t
TCKS
t
TCKS
t
TCKWH
t
TCKWL
TCLKA to
TCLKD
Figure 20.19 Timer External Clock Input Timing
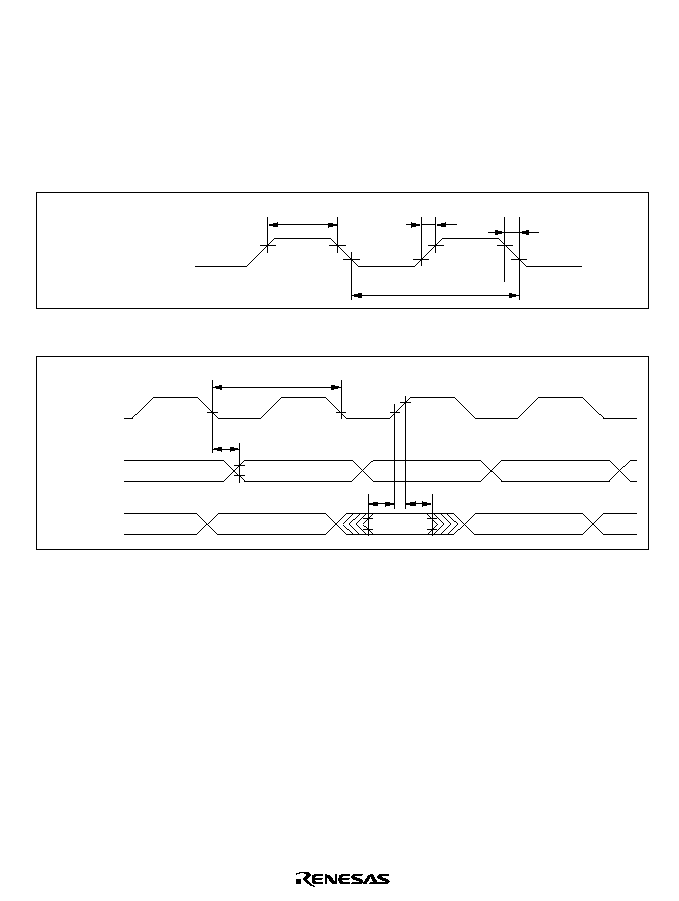
607
20.3.7
SCI Input/Output Timing
SCI timing is shown as follows:
∑
SCI input clock timing
Figure 20.20 shows the SCI input clock timing.
∑
SCI input/output timing (synchronous mode)
Figure 20.21 shows the SCI input/output timing in synchronous mode.
SCK
0
to SCK
2
t
SCKW
t
Scyc
t
SCKr
t
SCKf
Figure 20.20 SCI Input Clock Timing
t
Scyc
t
TXD
t
RXS
t
RXH
SCK
0
to
SCK
2
TxD
0
to TxD
2
(transmit
data)
RxD
0
to RxD
2
(receive
data)
Figure 20.21 SCI Input/Output Timing in Synchronous Mode

608
20.3.8
DMAC Timing
DMAC timing is shown as follows.
∑
DMAC
TEND output timing for 2 state access
Figure 20.22 shows the DMAC
TEND output timing for 2 state access.
∑
DMAC
TEND output timing for 3 state access
Figure 20.23 shows the DMAC
TEND output timing for 3 state access.
∑
DMAC
DREQ input timing
Figure 20.24 shows DMAC
DREQ input timing.
T
1
T
2
t
TED1
t
TED2
TEND
Figure 20.22 DMAC
TEND Output Timing for 2 State Access
T
1
T
2
T
3
t
TED1
t
TED2
TEND
Figure 20.23 DMAC
TEND Output Timing for 3 State Access
t
DRQH
t
DRQS
DREQ
Figure 20.24 DMAC
DREQ Input Timing
609
Appendix A Instruction Set
A.1
Instruction List
Operand Notation
Symbol
Description
Rd
General destination register
Rs
General source register
Rn
General register
ERd
General destination register (address register or 32-bit register)
ERs
General source register (address register or 32-bit register)
ERn
General register (32-bit register)
(EAd)
Destination operand
(EAs)
Source operand
PC
Program counter
SP
Stack pointer
CCR
Condition code register
N
N (negative) flag in CCR
Z
Z (zero) flag in CCR
V
V (overflow) flag in CCR
C
C (carry) flag in CCR
disp
Displacement
Transfer from the operand on the left to the operand on the right, or transition from
the state on the left to the state on the right
+
Addition of the operands on both sides
≠
Subtraction of the operand on the right from the operand on the left
◊
Multiplication of the operands on both sides
˜
Division of the operand on the left by the operand on the right
Logical AND of the operands on both sides
Logical OR of the operands on both sides
Exclusive logical OR of the operands on both sides
¨
NOT (logical complement)
( ), < >
Contents of operand
Note: General registers include 8-bit registers (R0H to R7H and R0L to R7L) and 16-bit registers
(R0 to R7 and E0 to E7).

610
Condition Code Notation
Symbol
Description
Changed according to execution result
*
Undetermined (no guaranteed value)
0
Cleared to 0
1
Set to 1
--
Not affected by execution of the instruction
Varies depending on conditions, described in notes
611
Table A.1
Instruction Set
1. Data transfer instructions
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@≠ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
MOV.B #xx:8, Rd
MOV.B Rs, Rd
MOV.B @ERs, Rd
MOV.B @(d:16, ERs),
Rd
MOV.B @(d:24, ERs),
Rd
MOV.B @ERs+, Rd
MOV.B @aa:8, Rd
MOV.B @aa:16, Rd
MOV.B @aa:24, Rd
MOV.B Rs, @ERd
MOV.B Rs, @(d:16,
ERd)
MOV.B Rs, @(d:24,
ERd)
MOV.B Rs, @≠ERd
MOV.B Rs, @aa:8
MOV.B Rs, @aa:16
MOV.B Rs, @aa:24
MOV.W #xx:16, Rd
MOV.W Rs, Rd
MOV.W @ERs, Rd
MOV.W @(d:16, ERs),
Rd
MOV.W @(d:24, ERs),
Rd
MOV.W @ERs+, Rd
MOV.W @aa:16, Rd
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
W
W
W
W
W
W
W
2
2
2
4
8
2
2
4
6
2
4
8
2
2
4
6
4
2
2
4
8
2
4
#xx:8
Rd8
Rs8
Rd8
@ERs
Rd8
@(d:16, ERs)
Rd8
@(d:24, ERs)
Rd8
@ERs
RD8
ERs32+1
ERs32
@aa:8
Rd8
@aa:16
Rd8
@aa:24
Rd8
Rs8
@ERd
Rs8
@(d:16, ERd)
Rs8
@(d:24, ERd)
ERd32≠1
ERd32
Rs8
@ERd
Rs8
@aa:8
Rs8
@aa:16
Rs8
@aa:24
#xx:16
Rd16
Rs16
Rd16
@ERs
Rd16
@(d:16, ERs)
Rd16
@(d:24, ERs)
Rd16
@ERs
Rd16
ERs32+2
@ERd32
@aa:16
Rd16
2
2
4
6
10
6
4
6
8
4
6
10
6
4
6
8
4
2
4
6
10
6
6
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
612
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
MOV.W @aa:24, Rd
MOV.W Rs, @ERd
MOV.W Rs, @(d:16,
ERd)
MOV.W Rs, @(d:24,
ERd)
MOV.W Rs, @≠ERd
MOV.W Rs, @aa:16
MOV.W Rs, @aa:24
MOV.L #xx:32, Rd
MOV.L ERs, ERd
MOV.L @ERs, ERd
MOV.L @(d:16, ERs),
ERd
MOV.L @(d:24, ERs),
ERd
MOV.L @ERs+, ERd
MOV.L @aa:16, ERd
MOV.L @aa:24, ERd
MOV.L ERs, @ERd
MOV.L ERs, @(d:16,
ERd)
MOV.L ERs, @(d:24,
ERd)
MOV.L ERs, @≠ERd
MOV.L ERs, @aa:16
MOV.L ERs, @aa:24
POP.W Rn W
POP.L ERn L
W
W
W
W
W
W
W
L
L
L
L
L
L
L
L
L
L
L
L
L
L
W
L
6
2
4
8
2
4
6
6
2
4
6
10
4
6
8
4
6
10
4
6
8
2
4
@aa:24
Rd16
Rs16
@ERd
Rs16
@(d:16, ERd)
Rs16
@(d:24, ERd)
ERd32≠2
ERd32
Rs16
@ERd
Rs16
@aa:16
Rs16
@aa:24
#xx:32
Rd32
ERs32
ERd32
@ERs
ERd32
@(d:16, ERs)
ERd32
@(d:24, ERs)
ERd32
@ERs
ERd32
ERs32+4
ERs32
@aa:16
ERd32
@aa:24
ERd32
ERs32
@ERd
ERs32
@(d:16, ERd)
ERs32
@(d:24, ERd)
ERd32≠4
ERd32
ERs32
@ERd
ERs32
@aa:16
ERs32
@aa:24
@SP
Rn16
SP+2
SP
@SP
ERn32
SP+4
SP
8
4
6
10
6
6
8
6
2
8
10
14
10
10
12
8
10
14
10
10
12
6
10
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
613
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
PUSH.W Rn
PUSH.L ERn
MOVFPE @aa:16,
Rd
MOVTPE Rs,
@aa:16
W
L
B
B
2
4
4
4
SP≠2
SP
Rn16
@SP
SP≠4
SP
ERn32
@SP
Cannot be used in the
H8/3006 and H8/3007
Cannot be used in the
H8/3006 and H8/3007
6
10
-- --
0
--
-- --
0
--
Cannot be used in the
H8/3006 and H8/3007
Cannot be used in the
H8/3006 and H8/3007
2. Arithmetic instructions
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
ADD.B #xx:8, Rd
ADD.B Rs, Rd
ADD.W #xx:16, Rd
ADD.W Rs, Rd
ADD.L #xx:32, ERd
ADD.L ERs, ERd
ADDX.B #xx:8, Rd
ADDX.B Rs, Rd
ADDS.L #1, ERd
ADDS.L #2, ERd
ADDS.L #4, ERd
INC.B Rd
INC.W #1, Rd
INC.W #2, Rd
B
B
W
W
L
L
B
B
L
L
L
B
W
W
2
2
4
2
6
2
2
2
2
2
2
2
2
2
Rd8+#xx:8
Rd8
Rd8+Rs8
Rd8
Rd16+#xx:16
Rd16
Rd16+Rs16
Rd16
ERd32+#xx:32
ERd32
ERd32+ERs32
ERd32
Rd8+#xx:8 +C
Rd8
Rd8+Rs8 +C
Rd8
ERd32+1
ERd32
ERd32+2
ERd32
ERd32+4
ERd32
Rd8+1
Rd8
Rd16+1
Rd16
Rd16+2
Rd16
2
2
4
2
6
2
2
2
2
2
2
2
2
2
--
--
-- (1)
-- (1)
-- (2)
-- (2)
--
(3)
--
(3)
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- --
--
-- --
--
-- --
--
614
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
INC.L #1, ERd
INC.L #2, ERd
DAA Rd
SUB.B Rs, Rd
SUB.W #xx:16, Rd
SUB.W Rs, Rd
SUB.L #xx:32, ERd
SUB.L ERs, ERd
SUBX.B #xx:8, Rd
SUBX.B Rs, Rd
SUBS.L #1, ERd
SUBS.L #2, ERd
SUBS.L #4, ERd
DEC.B Rd
DEC.W #1, Rd
DEC.W #2, Rd
DEC.L #1, ERd
DEC.L #2, ERd
DAS.Rd
MULXU. B Rs, Rd
MULXU. W Rs, ERd
MULXS. B Rs, Rd
MULXS. W Rs, ERd
DIVXU. B Rs, Rd
L
L
B
B
W
W
L
L
B
B
L
L
L
B
W
W
L
L
B
B
W
B
W
B
2
2
2
2
4
2
6
2
2
2
2
2
2
2
2
2
2
2
2
2
2
4
4
2
ERd32+1
ERd32
ERd32+2
ERd32
Rd8 decimal adjust
Rd8
Rd8≠Rs8
Rd8
Rd16≠#xx:16
Rd16
Rd16≠Rs16
Rd16
ERd32≠#xx:32
ERd32
ERd32≠ERs32
ERd32
Rd8≠#xx:8≠C
Rd8
Rd8≠Rs8≠C
Rd8
ERd32≠1
ERd32
ERd32≠2
ERd32
ERd32≠4
ERd32
Rd8≠1
Rd8
Rd16≠1
Rd16
Rd16≠2
Rd16
ERd32≠1
ERd32
ERd32≠2
ERd32
Rd8 decimal adjust
Rd8
Rd8
◊
Rs8
Rd16
(unsigned multiplication)
Rd16
◊
Rs16
ERd32
(unsigned multiplication)
Rd8
◊
Rs8
Rd16
(signed multiplication)
Rd16
◊
Rs16
ERd32
(signed multiplication)
Rd16
˜
Rs8
Rd16
(RdH: remainder, RdL:
quotient)
(unsigned division)
2
2
2
2
4
2
6
2
2
2
2
2
2
2
2
2
2
2
2
14
22
16
24
14
-- --
--
-- --
--
--
*
*
--
--
-- (1)
-- (1)
-- (2)
-- (2)
--
(3)
--
(3)
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- --
--
-- --
--
-- --
--
-- --
--
-- --
--
--
*
*
--
-- -- -- -- -- --
-- -- -- -- -- --
-- --
-- --
-- --
-- --
-- -- (6) (7) -- --
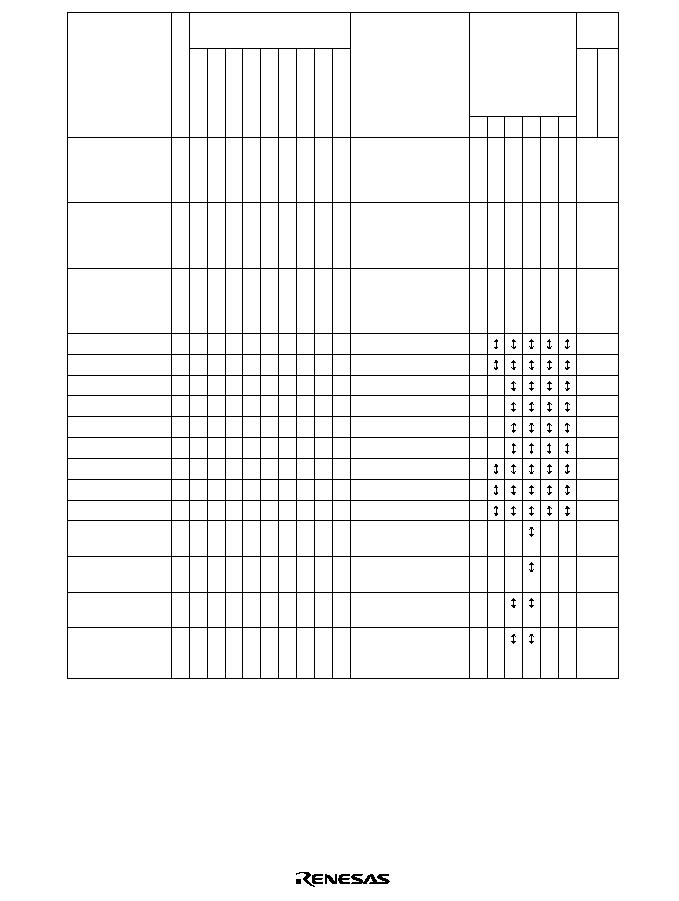
615
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
DIVXU. W Rs, ERd
DIVXS. B Rs, Rd
DIVXS. W Rs, ERd
CMP.B #xx:8, Rd
CMP.B Rs, Rd
CMP.W #xx:16, Rd
CMP.W Rs, Rd
CMP.L #xx:32, ERd
CMP.L ERs, ERd
NEG.B Rd
NEG.W Rd
NEG.L ERd
EXTU.W Rd
EXTU.L ERd
EXTS.W Rd
EXTS.L ERd
W
B
W
B
B
W
W
L
L
B
W
L
W
L
W
L
2
4
4
2
2
4
2
6
2
2
2
2
2
2
2
2
ERd32
˜
Rs16
ERd32
(Ed: remainder,
Rd: quotient)
(unsigned division)
Rd16
˜
Rs8
Rd16
(RdH: remainder,
RdL: quotient)
(signed division)
ERd32
˜
Rs16
ERd32
(Ed: remainder,
Rd: quotient)
(signed division)
Rd8≠#xx:8
Rd8≠Rs8
Rd16≠#xx:16
Rd16≠Rs16
ERd32≠#xx:32
ERd32≠ERs32
0≠Rd8
Rd8
0≠Rd16
Rd16
0≠ERd32
ERd32
0
(<bits 15 to 8>
of Rd16)
0
(<bits 31 to 16>
of ERd32)
(<bit 7> of Rd16)
(<bits 15 to 8> of Rd16)
(<bit 15> of ERd32)
(<bits 31 to 16> of
ERd32)
22
16
24
2
2
4
2
6
2
2
2
2
2
2
2
2
-- -- (6) (7) -- --
-- -- (8) (7) -- --
-- -- (8) (7) -- --
--
--
-- (1)
-- (1)
-- (2)
-- (2)
--
--
--
-- --
0
0
--
-- --
0
0
--
-- --
0
--
-- --
0
--
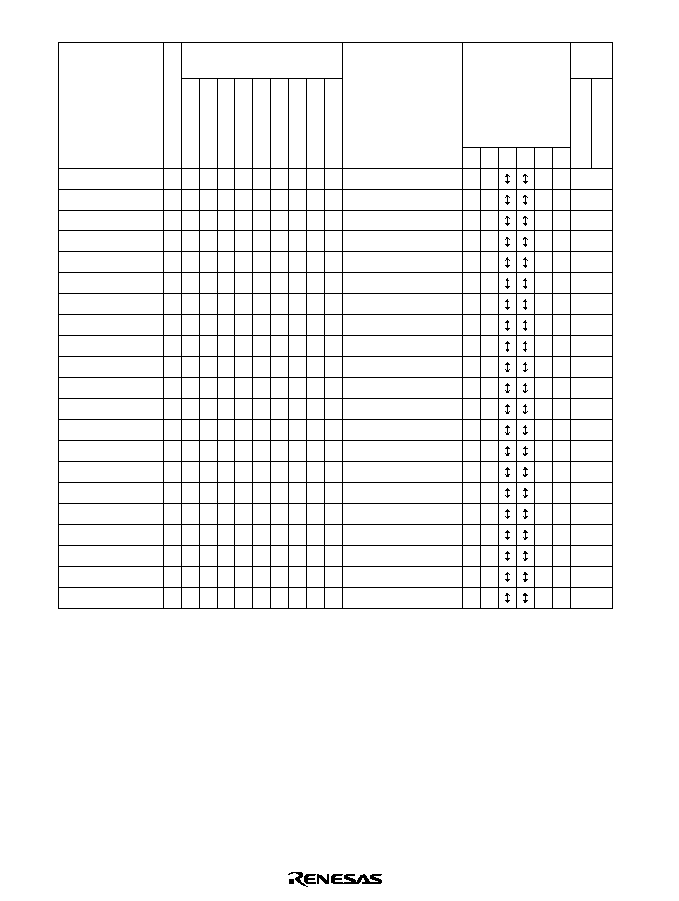
616
3. Logic instructions
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
AND.B #xx:8, Rd
AND.B Rs, Rd
AND.W #xx:16, Rd
AND.W Rs, Rd
AND.L #xx:32, ERd
AND.L ERs, ERd
OR.B #xx:8, Rd
OR.B Rs, Rd
OR.W #xx:16, Rd
OR.W Rs, Rd
OR.L #xx:32, ERd
OR.L ERs, ERd
XOR.B #xx:8, Rd
XOR.B Rs, Rd
XOR.W #xx:16, Rd
XOR.W Rs, Rd
XOR.L #xx:32, ERd
XOR.L ERs, ERd
NOT.B Rd
NOT.W Rd
NOT.L ERd
B
B
W
W
L
L
B
B
W
W
L
L
B
B
W
W
L
L
B
W
L
2
2
4
2
6
4
2
2
4
2
6
4
2
2
4
2
6
4
2
2
2
Rd8
#xx:8
Rd8
Rd8
Rs8
Rd8
Rd16
#xx:16
Rd16
Rd16
Rs16
Rd16
ERd32
#xx:32
ERd32
ERd32
ERs32
ERd32
Rd8
#xx:8
Rd8
Rd8
Rs8
Rd8
Rd16
#xx:16
Rd16
Rd16
Rs16
Rd16
ERd32
#xx:32
ERd32
ERd32
ERs32
ERd32
Rd8
#xx:8
Rd8
Rd8
Rs8
Rd8
Rd16
#xx:16
Rd16
Rd16
Rs16
Rd16
ERd32
#xx:32
ERd32
ERd32
ERs32
ERd32
¨ Rd8
Rd8
¨ Rd16
Rd16
¨ Rd32
Rd32
2
2
4
2
6
4
2
2
4
2
6
4
2
2
4
2
6
4
2
2
2
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
-- --
0
--
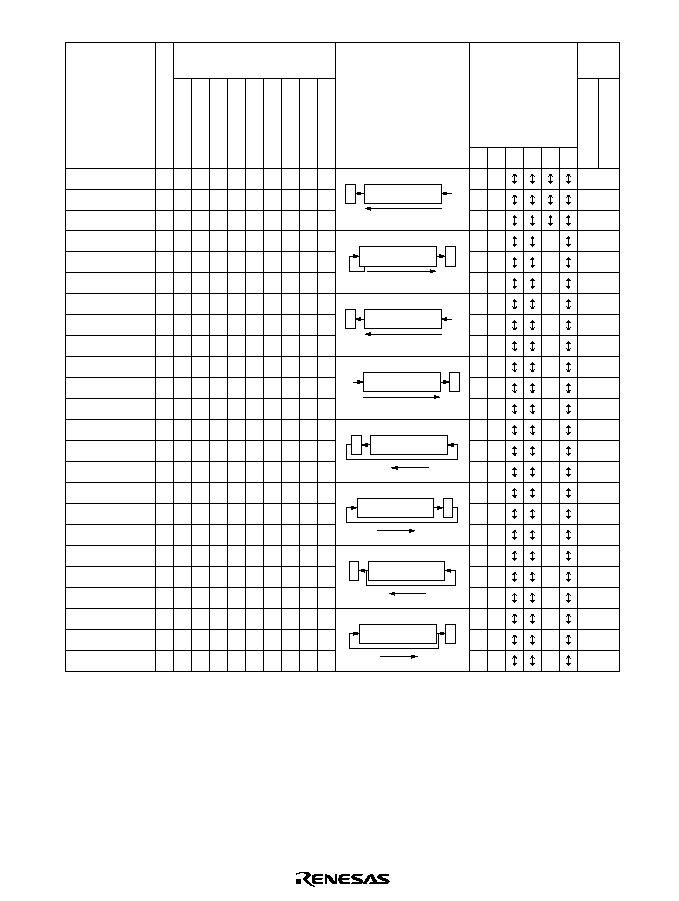
617
4. Shift instructions
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
SHAL.B Rd
SHAL.W Rd
SHAL.L ERd
SHAR.B Rd
SHAR.W Rd
SHAR.L ERd
SHLL.B Rd
SHLL.W Rd
SHLL.L ERd
SHLR.B Rd
SHLR.W Rd
SHLR.L ERd
ROTXL.B Rd
ROTXL.W Rd
ROTXL.L ERd
ROTXR.B Rd
ROTXR.W Rd
ROTXR.L ERd
ROTL.B Rd
ROTL.W Rd
ROTL.L ERd
ROTR.B Rd
ROTR.W Rd
ROTR.L ERd
B
W
L
B
W
L
B
W
L
B
W
L
B
W
L
B
W
L
B
W
L
B
W
L
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
-- --
-- --
-- --
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
-- --
0
C
MSB
LSB
C
MSB
LSB
C
MSB
LSB
C
MSB
LSB
MSB
LSB
0
C
MSB
LSB
0
C
C
MSB
LSB
0
C
MSB
LSB
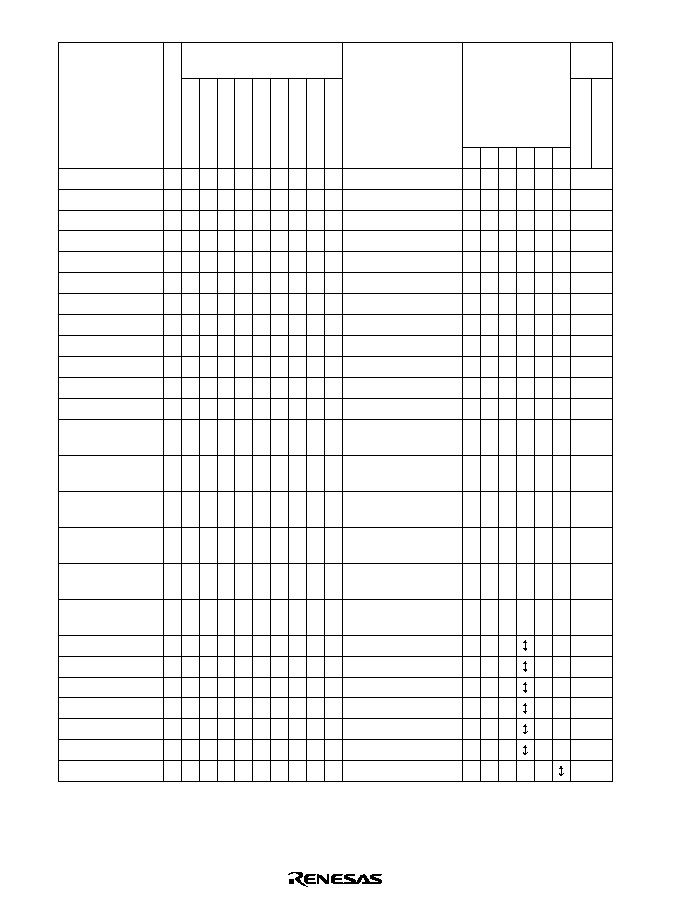
618
5. Bit manipulation instructions
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
BSET #xx:3, Rd
BSET #xx:3, @ERd
BSET #xx:3, @aa:8
BSET Rn, Rd
BSET Rn, @ERd
BSET Rn, @aa:8
BCLR #xx:3, Rd
BCLR #xx:3, @ERd
BCLR #xx:3, @aa:8
BCLR Rn, Rd
BCLR Rn, @ERd
BCLR Rn, @aa:8
BNOT #xx:3, Rd
BNOT #xx:3, @ERd
BNOT #xx:3, @aa:8
BNOT Rn, Rd
BNOT Rn, @ERd
BNOT Rn, @aa:8
BTST #xx:3, Rd
BTST #xx:3, @ERd
BTST #xx:3, @aa:8
BTST Rn, Rd
BTST Rn, @ERd
BTST Rn, @aa:8
BLD #xx:3, Rd
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
(#xx:3 of Rd8)
1
(#xx:3 of @ERd)
1
(#xx:3 of @aa:8)
1
(Rn8 of Rd8)
1
(Rn8 of @ERd)
1
(Rn8 of @aa:8)
1
(#xx:3 of Rd8)
0
(#xx:3 of @ERd)
0
(#xx:3 of @aa:8)
0
(Rn8 of Rd8)
0
(Rn8 of @ERd)
0
(Rn8 of @aa:8)
0
(#xx:3 of Rd8)
¨ (#xx:3 of Rd8)
(#xx:3 of @ERd)
¨ (#xx:3 of @ERd)
(#xx:3 of @aa:8)
¨ (#xx:3 of @aa:8)
(Rn8 of Rd8)
¨ (Rn8 of Rd8)
(Rn8 of @ERd)
¨ (Rn8 of @ERd)
(Rn8 of @aa:8)
¨ (Rn8 of @aa:8)
¨ (#xx:3 of Rd8)
Z
¨ (#xx:3 of @ERd)
Z
¨ (#xx:3 of @aa:8)
Z
¨ (Rn8 of @Rd8)
Z
¨ (Rn8 of @ERd)
Z
¨ (Rn8 of @aa:8)
Z
(#xx:3 of Rd8)
C
2
8
8
2
8
8
2
8
8
2
8
8
2
8
8
2
8
8
2
6
6
2
6
6
2
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- --
-- --
-- -- --
-- --
-- -- --
-- --
-- -- --
-- --
-- -- --
-- --
-- -- --
-- --
-- -- -- -- --
619
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
BLD #xx:3, @ERd
BLD #xx:3, @aa:8
BILD #xx:3, Rd
BILD #xx:3, @ERd
BILD #xx:3, @aa:8
BST #xx:3, Rd
BST #xx:3, @ERd
BST #xx:3, @aa:8
BIST #xx:3, Rd
BIST #xx:3, @ERd
BIST #xx:3, @aa:8
BAND #xx:3, Rd
BAND #xx:3, @ERd
BAND #xx:3, @aa:8
BIAND #xx:3, Rd
BIAND #xx:3, @ERd
BIAND #xx:3, @aa:8
BOR #xx:3, Rd
BOR #xx:3, @ERd
BOR #xx:3, @aa:8
BIOR #xx:3, Rd
BIOR #xx:3, @ERd
BIOR #xx:3, @aa:8
BXOR #xx:3, Rd
BXOR #xx:3, @ERd
BXOR #xx:3, @aa:8
BIXOR #xx:3, Rd
BIXOR #xx:3, @ERd
BIXOR #xx:3, @aa:8
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
2
4
4
(#xx:3 of @ERd)
C
(#xx:3 of @aa:8)
C
¨ (#xx:3 of Rd8)
C
¨ (#xx:3 of @ERd)
C
¨ (#xx:3 of @aa:8)
C
C
(#xx:3 of Rd8)
C
(#xx:3 of @ERd24)
C
(#xx:3 of @aa:8)
¨ C
(#xx:3 of Rd8)
¨ C
(#xx:3 of @ERd24)
¨ C
(#xx:3 of @aa:8)
C
(#xx:3 of Rd8)
C
C
(#xx:3 of @ERd24)
C
C
(#xx:3 of @aa:8)
C
C
¨ (#xx:3 of Rd8)
C
C
¨ (#xx:3 of @ERd24)
C
C
¨ (#xx:3 of @aa:8)
C
C
(#xx:3 of Rd8)
C
C
(#xx:3 of @ERd24)
C
C
(#xx:3 of @aa:8)
C
C
¨ (#xx:3 of Rd8)
C
C
¨ (#xx:3 of @ERd24)
C
C
¨ (#xx:3 of @aa:8)
C
C
(#xx:3 of Rd8)
C
C
(#xx:3 of @ERd24)
C
C
(#xx:3 of @aa:8)
C
C
¨ (#xx:3 of Rd8)
C
C
¨(#xx:3 of @ERd24)
C
C
¨ (#xx:3 of @aa:8)
C
6
6
2
6
6
2
8
8
2
8
8
2
6
6
2
6
6
2
6
6
2
6
6
2
6
6
2
6
6
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
-- -- -- -- --
620
6. Branching instructions
Mnemonic
Operation
Branch
Condition
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
BRA d:8 (BT d:8)
BRA d:16 (BT d:16)
BRN d:8 (BF d:8)
BRN d:16 (BF d:16)
BHI d:8
BHI d:16
BLS d:8
BLS d:16
BCC d:8 (BHS d:8)
BCC d:16 (BHS d:16)
BCS d:8 (BLO d:8)
BCS d:16 (BLO d:16)
BNE d:8
BNE d:16
BEQ d:8
BEQ d:16
BVC d:8
BVC d:16
BVS d:8
BVS d:16
BPL d:8
BPL d:16
BMI d:8
BMI d:16
BGE d:8
BGE d:16
BLT d:8
BLT d:16
BGT d:8
BGT d:16
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
2
4
If condition
is true then
PC
PC+d else
next;
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
4
6
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
Always
Never
C
Z = 0
C
Z = 1
C = 0
C = 1
Z = 0
Z = 1
V = 0
V = 1
N = 0
N = 1
N
V = 0
N
V = 1
Z
(N
V)
= 0
621
Mnemonic
Operation
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
BLE d:8
BLE d:16
JMP @ERn
JMP @aa:24
JMP @@aa:8
BSR d:8
BSR d:16
JSR @ERn
JSR @aa:24
JSR @@aa:8
RTS
--
--
--
--
--
--
--
--
--
--
--
2
4
2
4
2
2
4
2
4
2
2
PC
ERn
PC
aa:24
PC
@aa:8
PC
@≠SP
PC
PC+d:8
PC
@≠SP
PC
PC+d:16
PC
@≠SP
PC
@ERn
PC
@≠SP
PC
@aa:24
PC
@≠SP
PC
@aa:8
PC
@SP+
4
6
4
6
8
6
8
6
8
8
8
10
8
10
8
10
12
10
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
Branch
Condition
If condition
is true then
PC
PC+d else
next;
Z
(N
V) = 0
Z
(N
V) = 1
622
7. System control instructions
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
TRAPA #x:2
RTE
SLEEP
LDC #xx:8, CCR
LDC Rs, CCR
LDC @ERs, CCR
LDC @(d:16, ERs),
CCR
LDC @(d:24, ERs),
CCR
LDC @ERs+, CCR
LDC @aa:16, CCR
LDC @aa:24, CCR
STC CCR, Rd
STC CCR, @ERd
STC CCR, @(d:16,
ERd)
STC CCR, @(d:24,
ERd)
STC CCR, @≠ERd
STC CCR, @aa:16
STC CCR, @aa:24
ANDC #xx:8, CCR
ORC #xx:8, CCR
XORC #xx:8, CCR
NOP
--
--
--
B
B
W
W
W
W
W
W
B
W
W
W
W
W
W
B
B
B
--
2
2
2
4
6
10
4
6
8
2
4
6
10
4
6
8
2
2
2
2
PC
@≠SP
CCR
@≠SP
<vector>
PC
CCR
@SP+
PC
@SP+
Transition to powerdown
state
#xx:8
CCR
Rs8
CCR
@ERs
CCR
@(d:16, ERs)
CCR
@(d:24, ERs)
CCR
@ERs
CCR
ERs32+2
ERs32
@aa:16
CCR
@aa:24
CCR
CCR
Rd8
CCR
@ERd
CCR
@(d:16, ERd)
CCR
@(d:24, ERd)
ERd32≠2
ERd32
CCR
@ERd
CCR
@aa:16
CCR
@aa:24
CCR
#xx:8
CCR
CCR
#xx:8
CCR
CCR
#xx:8
CCR
PC
PC+2
10
2
2
2
6
8
12
8
8
10
2
6
8
12
8
8
10
2
2
2
2
1
-- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
-- -- -- -- -- --
14 16
623
8. Block transfer instructions
Mnemonic
Operation
Condition Code
Operand Siz
e
#xx
Rn
@ERn
@(d,
ERn)
@
≠
ERn/@ERn+
@aa
@(d,
PC)
@@aa
--
Addressing Mode and
Instruction Length (bytes)
Normal
Ad
v
anced
No. of
States*
1
I
H
N
Z
V
C
EEPMOV. B
EEPMOV. W
--
--
4
4
if R4L
0
repeat @R5
@R6
R5+1
R5
R6+1
R6
R4L≠1
R4L
until
R4L=0
else next;
if R4
0
repeat @R5
@R6
R5+1
R5
R6+1
R6
R4≠1
R4
until
R4=0
else next;
8+
4n*
2
8+
4n*
2
-- -- -- -- -- --
-- -- -- -- -- --
Notes: 1. The number of states is the number of states required for execution when the
instruction and its operands are located in on-chip memory. For other cases see section
A.3, Normal mode is not available in the H8/3006 and H8/3007.
2. n is the value set in register R4L or R4.
(1) Set to 1 when a carry or borrow occurs at bit 11; otherwise cleared to 0.
(2) Set to 1 when a carry or borrow occurs at bit 27; otherwise cleared to 0.
(3) Retains its previous value when the result is zero; otherwise cleared to 0.
(4) Set to 1 when the adjustment produces a carry; otherwise retains its previous
value.
(5) The number of states required for execution of an instruction that transfers data in
synchronization with the E clock is variable.
(6) Set to 1 when the divisor is negative; otherwise cleared to 0.
(7) Set to 1 when the divisor is zero; otherwise cleared to 0.
(8) Set to 1 when the quotient is negative; otherwise cleared to 0.
624
A.2
Operation Code Map (1)
AH
AL
0123
4567
89
A
B
C
D
E
F
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
NOP
BRA
MULXU
BSET
BRN
DIVXU
BNOT
STC
BHI
MULXU
BCLR
LDC
BLS
DIVXU
BTST
ORC
OR.B
BCC
RTS
OR
XORC
XOR.B
BCS
BSR
XOR
BOR
BIOR
BXOR
BIXOR
BAND
BIAND
ANDC
AND.B
BNE
RTE
AND
LDC
BNQ
TRAPA
BLD
BILD
BST
BIST
BVC
MOV
BPL
JMP
BMI
EEPMOV
ADDX
SUBX
BGT
JSR
BLE
MOV
ADD
ADDX
CMP
SUBX
OR
XOR
AND
MOV
Instruction when most significant bit of BH is 0.
Instruction when most significant bit of BH is 1.
Instruction code:
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
BVS
BLT
BGE
BSR
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(2)
Table A.2
(3)
1st byte
2nd byte
AH
BH
AL
BL
ADD
SUB
MOV
CMP
MOV.B
625
Operation Code Map (2)
AH AL
BH
0123
4567
89
A
B
C
D
E
F
01
0A
0B
0F
10
11
12
13
17
1A
1B
1F
58
79
7A
MOV
INC
ADDS
DAA
DEC
SUBS
DAS
BRA
MOV
MOV
BHI
CMP
CMP
LDC/STC
BCC
OR
OR
BPL
BGT
Instruction code:
BVS
SLEEP
BVC
BGE
Table A.2
(3)
Table A.2
(3)
Table A.2
(3)
BNE
AND
AND
INC
EXTU
DEC
BEQ
INC
EXTU
DEC
BCS
XOR
XOR
BRN
ADD
ADD
INC
EXTS
DEC
BLT
INC
EXTS
DEC
BLE
SHAL
SHAR
ROTL
ROTR
NEG
BMI
1st byte
2nd byte
AH
BH
AL
BL
SUBS
ADDS
ADD
MOV
SUB
CMP
SHLL
SHLR
ROTXL
ROTXR
NOT
SHAL
SHAR
ROTL
ROTR
NEG
SHLL
SHLR
ROTXL
ROTXR
NOT
BLS
SUB
SUB
626
Operation Code Map (3)
AH
ALBH
BLCH
CL
0123
4567
89
A
B
C
D
E
F
01406
01C05
01D05
01F06
7Cr06
7Cr07
7Dr06
7Dr07
7Eaa6
7Eaa7
7Faa6
7Faa7
MULXS
BSET
BSET
BSET
BSET
DIVIXS
BNOT
BNOT
BNOT
BNOT
MULXS
BCLR
BCLR
BCLR
BCLR
DIVXS
BTST
BTST
BTST
BTST
OR
XOR
BOR
BIOR
BXOR
BIXOR
BAND
BIAND
AND
BLD
BILD
BST
BIST
Instruction when most significant bit of DH is 0.
Instruction when most significant bit of DH is 1.
Instruction code:
*
*
*
*
*
*
*
*
1
1
1
1
2
2
2
2
BOR
BIOR
BXOR
BIXOR
BAND
BIAND
BLD
BILD
BST
BIST
Notes:
1.
2.
r is the register designation field.
aa is the absolute address field.
1st byte
2nd byte
AH
BH
AL
BL
3rd byte
CH
DH
CL
DL
4th byte
LDC
STC
LDC
LDC
LDC
STC
STC
STC

627
A.3
Number of States Required for Execution
The tables in this section can be used to calculate the number of states required for instruction
execution by the H8/300H CPU. Table A.4 indicates the number of instruction fetch, data
read/write, and other cycles occurring in each instruction. Table A.3 indicates the number of states
required per cycle according to the bus size. The number of states required for execution of an
instruction can be calculated from these two tables as follows:
Number of states = I
◊
S
I
+ J
◊
S
J
+ K
◊
S
K
+ L
◊
S
L
+ M
◊
S
M
+ N
◊
S
N
Examples of Calculation of Number of States Required for Execution
Examples: Advanced mode, stack located in external address space, on-chip supporting modules
accessed with 8-bit bus width, external devices accessed in three states with one wait state and
16-bit bus width.
BSET #0, @FFFFC7:8
From table A.4, I = L = 2 and J = K = M = N = 0
From table A.3, S
I
= 4 and S
L
= 3
Number of states = 2
◊
4 + 2
◊
3 = 14
JSR @@30
From table A.4, I = J = K = 2 and L = M = N = 0
From table A.3, S
I
= S
J
= S
K
= 4
Number of states = 2
◊
4 + 2
◊
4 + 2
◊
4 = 24
628
Table A.3
Number of States per Cycle
Access Conditions
On-Chip Sup-
External Device
porting Module
8-Bit Bus
16-Bit Bus
Cycle
On-Chip
Memory
8-Bit
Bus
16-Bit
Bus
2-State
Access
3-State
Access
2-State
Access
3-State
Access
Instruction fetch
S
I
2
6
3
4
6 + 2m
2
3 + m
Branch address read S
J
Stack operation
S
K
Byte data access
S
L
3
2
3 + m
Word data access
S
M
6
4
6 + 2m
Internal operation
S
N
1
Legend
m: Number of wait states inserted into external device access

629
Table A.4
Number of Cycles per Instruction
Instruction Mnemonic
Instruction
Fetch
I
Branch
Addr. Read
J
Stack
Operation
K
Byte Data
Access
L
Word Data
Access
M
Internal
Operation
N
ADD
ADD.B #xx:8, Rd
ADD.B Rs, Rd
ADD.W #xx:16, Rd
ADD.W Rs, Rd
ADD.L #xx:32, Erd
ADD.L ERs, ERd
1
1
2
1
3
1
ADDS
ADDS #1/2/4, ERd
1
ADDX
ADDX #xx:8, Rd
ADDX Rs, Rd
1
1
AND
AND.B #xx:8, Rd
AND.B Rs, Rd
AND.W #xx:16, Rd
AND.W Rs, Rd
AND.L #xx:32, Erd
AND.L ERs, ERd
1
1
2
1
3
2
ANDC
ANDC #xx:8, CCR
1
BAND
BAND #xx:3, Rd
BAND #xx:3, @
BAND #xx:3, @aa:8
1
2
2
1
1
BCC
BRA d:8 (BT d:8)
BRN d:8 (BF d:8)
BHI d:8
BLS d:8
BCC d:8 (BHS d:8)
BCS d:8 (BLO d:8)
BNE d:8
BEQ d:8
BVC d:8
BVS d:8
BPL d:8
BMI d:8
BGE d:8
BLT d:8
BGT d:8
BLE d:8
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
630
Instruction Mnemonic
Instruction
Fetch
I
Branch
Addr. Read
J
Stack
Operation
K
Byte Data
Access
L
Word Data
Access
M
Internal
Operation
N
BCC
BRA d:16 (BT d:16)
BRN d:16 (BF d:16)
BHI d:16
BLS d:16
BCC d:16 (BHS d:16)
BCS d:16 (BLO d:16)
BNE d:16
BEQ d:16
BVC d:16
BVS d:16
BPL d:16
BMI d:16
BGE d:16
BLT d:16
BGT d:16
BLE d:16
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
BCLR
BCLR #xx:3, Rd
#xx:3, @Erd
BCLR #xx:3, @aa:8
BCLR Rn, Rd
BCLR Rn, @Erd
BCLR Rn, @aa:8
1
2
2
1
2
2
2
2
2
2
BIAND
BIAND #xx:3,
BIAND #xx:3, @Erd
BIAND #xx:3, @aa:8
1
2
2
1
1
BILD
BILD #xx:3, Rd
BILD #xx:3, @Erd
BILD #xx:3, @aa:8
1
2
2
1
1
BIOR
BIOR #xx:8, Rd
BIOR #xx:8, @
BIOR #xx:8, @aa:8
1
2
2
1
1
BIST
BIST #xx:3, Rd
BIST #xx:3, @Erd
BIST #xx:3, @aa:8
1
2
2
2
2
BIXOR
BIXOR #xx:3, Rd
BIXOR #xx:3, @
BIXOR #xx:3, @aa:8
1
2
2
1
1
BLD
BLD #xx:3, Rd
BLD #xx:3, @Erd
BLD #xx:3, @aa:8
1
2
2
1
1
631
Instruction Mnemonic
Instruction
Fetch
I
Branch
Addr. Read
J
Stack
Operation
K
Byte Data
Access
L
Word Data
Access
M
Internal
Operation
N
BNOT
BNOT #xx:3,
BNOT #xx:3, @Erd
BNOT #xx:3, @aa:8
BNOT Rn, Rd
BNOT Rn, @Erd
BNOT Rn, @aa:8
1
2
2
1
2
2
2
2
2
2
BOR
BOR #xx:3, Rd
BOR #xx:3, @Erd
BOR #xx:3, @aa:8
1
2
2
1
1
BSET
BSET #xx:3, Rd
BSET #xx:3, @Erd
BSET #xx:3, @aa:8
BSET Rn, Rd
BSET Rn, @ERd
BSET Rn, @aa:8
1
2
2
1
2
2
2
2
2
2
BSR
BSR d:8
Normal*
1
2
1
Advanced
2
2
BSR d:16
Normal*
1
2
1
2
Advanced
2
2
2
BST
BST #xx:3, Rd
BST #xx:3, @Erd
BST #xx:3, @aa:8
1
2
2
2
2
BTST
BTST #xx:3, Rd
BTST #xx:3, @Erd
BTST #xx:3, @aa:8
BTST Rn, Rd
BTST Rn, @ERd
BTST Rn, @aa:8
1
2
2
1
2
2
1
1
1
1
BXOR
BXOR #xx:3, Rd
BXOR #xx:3, @Erd
BXOR #xx:3, @aa:8
1
2
2
1
1
CMP
CMP.B #xx:8, Rd
CMP.B Rs, Rd
CMP.W #xx:16, Rd
CMP.W Rs, Rd
CMP.L #xx:32, Erd
CMP.L ERs, ERd
1
1
2
1
3
1
DAA
DAA Rd
1
DAS
DAS Rd
1

632
Instruction Mnemonic
Instruction
Fetch
I
Branch
Addr. Read
J
Stack
Operation
K
Byte Data
Access
L
Word Data
Access
M
Internal
Operation
N
DEC
DEC.B Rd
DEC.W #1/2, Rd
DEC.L #1/2, ERd
1
1
1
DIVXS
DIVXS.B Rs, Rd
DIVXS.W Rs, ERd
2
2
12
20
DIVXU
DIVXU.B Rs, Rd
DIVXU.W Rs, ERd
1
1
12
20
EEPMOV
EEPMOV.B
EEPMOV.W
2
2
2n + 2*
2
2n + 2*
2
EXTS
EXTS.W Rd
EXTS.L ERd
1
1
EXTU
EXTU.W Rd
EXTU.L ERd
1
1
INC
INC.B Rd
INC.W #1/2, Rd
INC.L #1/2, ERd
1
1
JMP
JMP @ERn
2
JMP @aa:24
2
2
JMP @@aa:8 Normal*
1
2
1
2
Advanced 2
2
2
JSR
JSR @ERn
Normal*
1
2
1
Advanced 2
2
JSR @aa:24
Normal*
1
2
1
2
Advanced 2
2
2
JSR @@aa:8 Normal*
1
2
1
1
Advanced 2
2
2
LDC
LDC #xx:8, CCR
LDC Rs, CCR
LDC @ERs, CCR
LDC @(d:16, ERs), CCR
LDC @(d:24, ERs), CCR
LDC @ERs+, CCR
LDC @aa:16, CCR
LDC @aa:24, CCR
1
1
2
3
5
2
3
4
1
1
1
1
1
1
2

633
Instruction Mnemonic
Instruction
Fetch
I
Branch
Addr. Read
J
Stack
Operation
K
Byte Data
Access
L
Word Data
Access
M
Internal
Operation
N
MOV
MOV.B #xx:8, Rd
MOV.B Rs, Rd
MOV.B @ERs, Rd
MOV.B @(d:16, ERs), Rd
MOV.B @(d:24, ERs), Rd
MOV.B @ERs+, Rd
MOV.B @aa:8, Rd
MOV.B @aa:16, Rd
MOV.B @aa:24, Rd
MOV.B Rs, @Erd
MOV.B Rs, @(d:16, Erd)
MOV.B Rs, @(d:24, ERd)
MOV.B Rs, @≠Erd
MOV.B Rs, @aa:8
MOV.B Rs, @aa:16
MOV.B Rs, @aa:24
MOV.W #xx:16, Rd
MOV.W Rs, Rd
MOV.W @ERs, Rd
MOV.W @(d:16, ERs), Rd
MOV.W @(d:24, ERs), Rd
MOV.W @ERs+, Rd
MOV.W @aa:16, Rd
MOV.W @aa:24, Rd
MOV.W Rs, @Erd
MOV.W Rs, @(d:16, Erd)
MOV.W Rs, @(d:24, Erd)
MOV.W Rs, @≠Erd
MOV.W Rs, @aa:16
MOV.W Rs, @aa:24
1
1
1
2
4
1
1
2
3
1
2
4
1
1
2
3
2
1
1
2
4
1
2
3
1
2
4
1
2
3
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2
2
2
2
MOV.L #xx:32, Erd
MOV.L ERs, Erd
MOV.L @ERs, Erd
MOV.L @(d:16, ERs), Erd
MOV.L @(d:24, ERs), Erd
MOV.L @ERs+, Erd
MOV.L @aa:16, Erd
MOV.L @aa:24, Erd
MOV.L ERs, @Erd
MOV.L ERs, @(d:16, Erd)
MOV.L ERs, @(d:24, Erd)
MOV.L ERs, @≠Erd
MOV.L ERs, @aa:16
MOV.L ERs, @aa:24
3
1
2
3
5
2
3
4
2
3
5
2
3
4
2
2
2
2
2
2
2
2
2
2
2
2
2
2
634
Instruction Mnemonic
Instruction
Fetch
I
Branch
Addr. Read
J
Stack
Operation
K
Byte Data
Access
L
Word Data
Access
M
Internal
Operation
N
MOVFPE
MOVFPE @aa:16, Rd*
3
2
1
MOVTPE
MOVTPE Rs, @aa:16*
3
2
1
MULXS
MULXS.B Rs, Rd
MULXS.W Rs, ERd
2
2
12
20
MULXU
MULXU.B Rs, Rd
MULXU.W Rs, ERd
1
1
12
20
NEG
NEG.B Rd
NEG.W Rd
NEG.L ERd
1
1
1
NOP
NOP
1
NOT
NOT.B Rd
NOT.W Rd
NOT.L ERd
1
1
1
OR
OR.B #xx:8, Rd
OR.B Rs, Rd
OR.W #xx:16, Rd
OR.W Rs, Rd
OR.L #xx:32, Erd
OR.L ERs, ERd
1
1
2
1
3
2
ORC
ORC #xx:8, CCR
1
POP
POP.W Rn
POP.L ERn
1
2
1
2
2
2
PUSH
PUSH.W Rn
PUSH.L ERn
1
2
1
2
2
2
ROTL
ROTL.B Rd
ROTL.W Rd
ROTL.L ERd
1
1
1
ROTR
ROTR.B Rd
ROTR.W Rd
ROTR.L ERd
1
1
1
ROTXL
ROTXL.B Rd
ROTXL.W Rd
ROTXL.L ERd
1
1
1
ROTXR
ROTXR.B Rd
ROTXR.W Rd
ROTXR.L ERd
1
1
1
RTE
RTE
2
2
2
635
Instruction Mnemonic
Instruction
Fetch
I
Branch
Addr. Read
J
Stack
Operation
K
Byte Data
Access
L
Word Data
Access
M
Internal
Operation
N
RTS
RTS
Normal*
1
2
1
2
Advanced 2
2
2
SHAL
SHAL.B Rd
SHAL.W Rd
SHAL.L ERd
1
1
1
SHAR
SHAR.B Rd
SHAR.W Rd
SHAR.L ERd
1
1
1
SHLL
SHLL.B Rd
SHLL.W Rd
SHLL.L ERd
1
1
1
SHLR
SHLR.B Rd
SHLR.W Rd
SHLR.L ERd
1
1
1
SLEEP
SLEEP
1
STC
STC CCR, Rd
STC CCR, @Erd
STC CCR, @(d:16, Erd)
STC CCR, @(d:24, Erd)
STC CCR, @≠Erd
STC CCR, @aa:16
STC CCR, @aa:24
1
2
3
5
2
3
4
1
1
1
1
1
1
2
SUB
SUB.B Rs, Rd
SUB.W #xx:16, Rd
SUB.W Rs, Rd
SUB.L #xx:32, Erd
SUB.L ERs, ERd
1
2
1
3
1
SUBS
SUBS #1/2/4, ERd
1
SUBX
SUBX #xx:8, Rd
SUBX Rs, Rd
1
1
TRAPA
TRAPA #x:2 Normal*
1
2
1
2
4
Advanced 2
2
2
4
XOR
XOR.B #xx:8, Rd
XOR.B Rs, Rd
XOR.W #xx:16, Rd
XOR.W Rs, Rd
XOR.L #xx:32, Erd
XOR.L ERs, ERd
1
1
2
1
3
2
XORC
XORC #xx:8, CCR
1
Notes: 1. n is the value set in register R4L or R4. The source and destination are accessed n + 1
times each.
2. Not available in the H8/3006 and H8/3007.
636
Appendix B Internal I/O Registers
B.1
Addresses
Address
Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'EE000
Reserved area (access prohibited)
H'EE001
H'EE002
H'EE003
P4DDR
8
P4
7
DDR P4
6
DDR P4
5
DDR P4
4
DDR P4
3
DDR P4
2
DDR
P4
1
DDR
P4
0
DDR
Port 4
H'EE004
Reserved area (access prohibited)
H'EE005
P6DDR
8
--
P6
6
DDR P6
5
DDR P6
4
DDR P6
3
DDR P6
2
DDR
P6
1
DDR
P6
0
DDR
Port 6
H'EE006
--
--
--
--
--
--
--
--
--
H'EE007
P8DDR
8
--
--
--
P8
4
DDR P8
3
DDR P8
2
DDR
P8
1
DDR
P8
0
DDR
Port 8
H'EE008
P9DDR
8
--
--
P9
5
DDR P9
4
DDR P9
3
DDR P9
2
DDR
P9
1
DDR
P9
0
DDR
Port 9
H'EE009
PADDR
8
PA
7
DDR PA
6
DDR PA
5
DDR PA
4
DDR PA
3
DDR PA
2
DDR
PA
1
DDR
PA
0
DDR
Port A
H'EE00A
PBDDR
8
PB
7
DDR PB
6
DDR PB
5
DDR PB
4
DDR PB
3
DDR PB
2
DDR
PB
1
DDR
PB
0
DDR
Port B
H'EE00B
--
--
--
--
--
--
--
--
--
H'EE00C
--
--
--
--
--
--
--
--
--
H'EE00D
--
--
--
--
--
--
--
--
--
H'EE00E
--
--
--
--
--
--
--
--
--
H'EE00F
--
--
--
--
--
--
--
--
--
H'EE010
--
--
--
--
--
--
--
--
--
H'EE011
MDCR
8
--
--
--
--
--
MDS2
MDS1
MDS0
System
H'EE012
SYSCR
8
SSBY
STS2
STS1
STS0
UE
NMIEG
SSOE
RAME
control
H'EE013
BRCR
8
A23E
A22E
A21E
A20E
--
--
--
BRLE
Bus controller
H'EE014
ISCR
8
--
--
IRQ5SC IRQ4SC IRQ3SC IRQ2SC
IRQ1SC
IRQ0SC
Interrupt
H'EE015
IER
8
--
--
IRQ5E
IRQ4E
IRQ3E
IRQ2E
IRQ1E
IRQ0E
controller
H'EE016
ISR
8
--
--
IRQ5F
IRQ4F
IRQ3F
IRQ2F
IRQ1F
IRQ0F
H'EE017
--
--
--
--
--
--
--
--
--
H'EE018
IPRA
8
IPRA7
IPRA6
IPRA5
IPRA4
IPRA3
IPRA2
IPRA1
IPRA0
H'EE019
IPRB
8
IPRB7
IPRB6
IPRB5
--
IPRB3
IPRB2
IPRB1
--
H'EE01A
DASTCR 8
--
--
--
--
--
--
--
DASTE
D/A converter
H'EE01B
DIVCR
8
--
--
--
--
--
--
DIV1
DIV0
System
H'EE01C
MSTCRH 8
PSTOP
--
--
--
--
MSTPH2 MSTPH1 MSTPH0
control
H'EE01D
MSTCRL 8
MSTPL7 --
MSTPL5 MSTPL4 MSTPL3 MSTPL2
--
MSTPL0
H'EE01E
--
--
--
--
--
--
--
--
--
H'EE01F
CSCR
8
CS7E
CS6E
CS5E
CS4E
--
--
--
--
Bus controller
637
Address
Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'EE020
ABWCR
8
ABW7
ABW6
ABW5
ABW4
ABW3
ABW2
ABW1
ABW0
Bus controller
H'EE021
ASTCR
8
AST7
AST6
AST5
AST4
AST3
AST2
AST1
AST0
H'EE022
WCRH
8
W71
W70
W61
W60
W51
W50
W41
W40
H'EE023
WCRL
8
W31
W30
W21
W20
W11
W10
W01
W00
H'EE024
BCR
8
ICIS1
ICIS0
BROME BRSTS1 BRSTS0 --
RDEA
WAITE
H'EE025
--
--
--
--
--
--
--
--
--
H'EE026
DRCRA
8
DRAS2
DRAS1
DRAS0
--
BE
RDM
SRFMD
RFSHE
DRAM
H'EE027
DRCRB
8
MXC1
MXC0
CSEL
RCYCE
--
TPC
RCW
RLW
interface
H'EE028
RTMCSR 8
CMF
CMIE
CKS2
CKS1
CKS0
--
--
--
H'EE029
RTCNT
8
H'EE02A
RTCOR
8
H'EE02B
Reserved area (access prohibited)
H'EE02C
H'EE02D
H'EE02E
H'EE02F
H'EE030
--
--
--
--
--
--
--
--
--
H'EE031
--
--
--
--
--
--
--
--
--
H'EE032
--
--
--
--
--
--
--
--
--
H'EE033
--
--
--
--
--
--
--
--
--
H'EE034
--
--
--
--
--
--
--
--
--
H'EE035
--
--
--
--
--
--
--
--
--
H'EE036
--
--
--
--
--
--
--
--
--
H'EE037
--
--
--
--
--
--
--
--
--
H'EE038
--
--
--
--
--
--
--
--
--
H'EE039
--
--
--
--
--
--
--
--
--
H'EE03A
--
--
--
--
--
--
--
--
--
H'EE03B
--
--
--
--
--
--
--
--
--
H'EE03C
Reserved area (access prohibited)
H'EE03D
--
--
--
--
--
--
--
--
--
H'EE03E
P4PCR
8
P4
7
PCR P4
6
PCR P4
5
PCR P4
4
PCR P4
3
PCR P4
2
PCR
P4
1
PCR
P4
0
PCR
Port 4
H'EE03F
Reserved area (access prohibited)
638
Address
Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'FFF20
MAR0AR
8
DMAC channel 0A
H'FFF21
MAR0AE
8
H'FFF22
MAR0AH
8
H'FFF23
MAR0AL
8
H'FFF24
ETCR0AH 8
H'FFF25
ETCR0AL 8
H'FFF26
IOAR0A
8
H'FFF27
DTCR0A
8
DTE
DTSZ
DTID
RPE
DTIE
DTS2
DTS1
DTS0
Short address mode
DTE
DTSZ
SAID
SAIDE
DTIE
DTS2A DTS1A DTS0A Full address mode
H'FFF28
MAR0BR
8
DMAC channel 0B
H'FFF29
MAR0BE
8
H'FFF2A
MAR0BH
8
H'FFF2B
MAR0BL
8
H'FFF2C
ETCR0BH 8
H'FFF2D
ETCR0BL 8
H'FFF2E
IOAR0B
8
H'FFF2F
DTCR0B
8
DTE
DTSZ
DTID
RPE
DTIE
DTS2
DTS1
DTS0
Short address mode
DTME
--
DAID
DAIDE
TMS
DTS2B DTS1B DTS0B Full address mode
H'FFF30
MAR1AR
8
DMAC channel 1A
H'FFF31
MAR1AE
8
H'FFF32
MAR1AH
8
H'FFF33
MAR1AL
8
H'FFF34
ETCR1AH 8
H'FFF35
ETCR1AL 8
H'FFF36
IOAR1A
8
H'FFF37
DTCR1A
8
DTE
DTSZ
DTID
RPE
DTIE
DTS2
DTS1
DTS0
Short address mode
DTE
DTSZ
SAID
SAIDE
DTIE
DTS2A DTS1A DTS0A Full address mode
H'FFF38
MAR1BR
8
DMAC channel 1B
H'FFF39
MAR1BE
8
H'FFF3A
MAR1BH
8
H'FFF3B
MAR1BL
8
H'FFF3C
ETCR1BH 8
H'FFF3D
ETCR1BL 8
H'FFF3E
IOAR1B
8
H'FFF3F
DTCR1B
8
DTE
DTSZ
DTID
RPE
DTIE
DTS2
DTS1
DTS0
Short address mode
DTME
--
DAID
DAIDE
TMS
DTS2B DTS1B DTS0B Full address mode
639
Address
Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'FFF40
--
--
--
--
--
--
--
--
--
H'FFF41
--
--
--
--
--
--
--
--
--
H'FFF42
--
--
--
--
--
--
--
--
--
H'FFF43
--
--
--
--
--
--
--
--
--
H'FFF44
--
--
--
--
--
--
--
--
--
H'FFF45
--
--
--
--
--
--
--
--
--
H'FFF46
--
--
--
--
--
--
--
--
--
H'FFF47
--
--
--
--
--
--
--
--
--
H'FFF48
--
--
--
--
--
--
--
--
--
H'FFF49
--
--
--
--
--
--
--
--
--
H'FFF4A
--
--
--
--
--
--
--
--
--
H'FFF4B
--
--
--
--
--
--
--
--
--
H'FFF4C
--
--
--
--
--
--
--
--
--
H'FFF4D
--
--
--
--
--
--
--
--
--
H'FFF4E
--
--
--
--
--
--
--
--
--
H'FFF4F
--
--
--
--
--
--
--
--
--
H'FFF50
--
--
--
--
--
--
--
--
--
H'FFF51
--
--
--
--
--
--
--
--
--
H'FFF52
--
--
--
--
--
--
--
--
--
H'FFF53
--
--
--
--
--
--
--
--
--
H'FFF54
--
--
--
--
--
--
--
--
--
H'FFF55
--
--
--
--
--
--
--
--
--
H'FFF56
--
--
--
--
--
--
--
--
--
H'FFF57
--
--
--
--
--
--
--
--
--
H'FFF58
--
--
--
--
--
--
--
--
--
H'FFF59
--
--
--
--
--
--
--
--
--
H'FFF5A
--
--
--
--
--
--
--
--
--
H'FFF5B
--
--
--
--
--
--
--
--
--
H'FFF5C
--
--
--
--
--
--
--
--
--
H'FFF5D
--
--
--
--
--
--
--
--
--
H'FFF5E
--
--
--
--
--
--
--
--
--
H'FFF5F
--
--
--
--
--
--
--
--
--
640
Address Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'FFF60 TSTR
8
--
--
--
--
--
STR2
STR1
STR0
16-bit timer,
H'FFF61 TSNC
8
--
--
--
--
--
SYNC2
SYNC1
SYNC0
(all channels)
H'FFF62 TMDR
8
--
MDF
FDIR
--
--
PWM2
PWM1
PWM0
H'FFF63 TOLR
8
--
--
TOB2
TOA2
TOB1
TOA1
TOB0
TOA0
H'FFF64 TISRA
8
--
IMIEA2
IMIEA1
IMIEA0
--
IMFA2
IMFA1
IMFA0
H'FFF65 TISRB
8
--
IMIEB2
IMIEB1
IMIEB0
--
IMFB2
IMFB1
IMFB0
H'FFF66 TISRC
8
--
OVIE2
OVIE1
OVIE0
--
OVF2
OVF1
OVF0
H'FFF67
H'FFF68 16TCR0
8
--
CCLR1
CCLR0
CKEG1
CKEG0
TPSC2
TPSC1
TPSC0
16-bit timer
H'FFF69 TIOR0
8
--
IOB2
IOB1
IOB0
--
IOA2
IOA1
IOA0
channel 0
H'FFF6A 16TCNT0H 16
H'FFF6B 16TCNT0L
H'FFF6C GRA0H
16
H'FFF6D GRA0L
H'FFF6E GRB0H
16
H'FFF6F GRB0L
H'FFF70 16TCR1
8
--
CCLR1
CCLR0
CKEG1
CKEG0
TPSC2
TPSC1
TPSC0
16-bit timer
H'FFF71 TIOR1
8
--
IOB2
IOB1
IOB0
--
IOA2
IOA1
IOA0
channel 1
H'FFF72 16TCNT1H 16
H'FFF73 16TCNT1L
H'FFF74 GRA1H
16
H'FFF75 GRA1L
H'FFF76 GRB1H
16
H'FFF77 GRB1L
H'FFF78 16TCR2
8
--
CCLR1
CCLR0
CKEG1
CKEG0
TPSC2
TPSC1
TPSC0
16-bit timer
H'FFF79 TIOR2
8
--
IOB2
IOB1
IOB0
--
IOA2
IOA1
IOA0
channel 2
H'FFF7A 16TCNT2H 16
H'FFF7B 16TCNT2L
H'FFF7C GRA2H
16
H'FFF7D GRA2L
H'FFF7E GRB2H
16
H'FFF7F GRB2L
641
Address Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'FFF80
8TCR0
8
CMIEB
CMIEA
OVIE
CCLR1
CCLR0
CKS2
CKS1
CKS0
8-bit timer
H'FFF81
8TCR1
8
CMIEB
CMIEA
OVIE
CCLR1
CCLR0
CKS2
CKS1
CKS0
channels 0
H'FFF82
8TCSR0
8
CMFB
CMFA
OVF
ADTE
OIS3
OIS2
OS1
OS0
and 1
H'FFF83
8TCSR1
8
CMFB
CMFA
OVF
ICE
OIS3
OIS2
OS1
OS0
H'FFF84
TCORA0
8
H'FFF85
TCORA1
8
H'FFF86
TCORB0
8
H'FFF87
TCORB1
8
H'FFF88
8TCNT0
8
H'FFF89
8TCNT1
8
H'FFF8A --
--
--
--
--
--
--
--
--
H'FFF8B --
--
--
--
--
--
--
--
--
H'FFF8C TCSR*
1
8
OVF
WT/I
T
TME
--
--
CKS2
CKS1
CKS0
WDT
H'FFF8D TCNT*
1
8
H'FFF8E --
--
--
--
--
--
--
--
--
H'FFF8F
RSTCSR
*
1
8
WRST
RSTOE
--
--
--
--
--
--
H'FFF90
8TCR2
8
CMIEB
CMIEA
OVIE
CCLR1
CCLR0
CKS2
CKS1
CKS0
8-bit timer
H'FFF91
8TCR3
8
CMIEB
CMIEA
OVIE
CCLR1
CCLR0
CKS2
CKS1
CKS0
channels 2
H'FFF92
8TCSR2
8
CMFB
CMFA
OVF
--
OIS3
OIS2
OS1
OS0
and 3
H'FFF93
8TCSR3
8
CMFB
CMFA
OVF
ICE
OIS3
OIS2
OS1
OS0
H'FFF94
TCORA2
8
H'FFF95
TCORA3
8
H'FFF96
TCORB2
8
H'FFF97
TCORB3
8
H'FFF98
8TCNT2
8
H'FFF99
8TCNT3
8
H'FFF9A --
--
--
--
--
--
--
--
--
H'FFF9B --
--
--
--
--
--
--
--
--
H'FFF9C DADR0
8
D/A
H'FFF9D DADR1
8
converter
H'FFF9E DACR
8
DAOE1
DAOE0
DAE
--
--
--
--
--
H'FFF9F
--
8
--
--
--
--
--
--
--
--

642
Address Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'FFFA0 TPMR
8
--
--
--
--
G3NOV
G2NOV
G1NOV
G0NOV
TPC
H'FFFA1 TPCR
8
G3CMS1 G3CMS0 G2CMS1 G2CMS0 G1CMS1 G1CMS0 G0CMS1 G0CMS0
H'FFFA2 NDERB
8
NDER15 NDER14 NDER13 NDER12 NDER11 NDER10 NDER9
NDER8
H'FFFA3 NDERA
8
NDER7
NDER6
NDER5
NDER4
NDER3
NDER2
NDER1
NDER0
H'FFFA4 NDRB*
2
8
NDER15 NDER14 NDER13 NDER12 NDER11 NDER10 NDER9
NDER8
NDER15 NDER14 NDER13 NDER12 --
--
--
--
H'FFFA5 NDRA*
2
8
NDER7
NDER6
NDER5
NDER4
NDER3
NDER2
NDER1
NDER0
NDER7
NDER6
NDER5
NDER4
--
--
--
--
H'FFFA6 NDRB*
2
8
--
--
--
--
--
--
--
--
--
--
--
--
NDER11 NDER10 NDER9
NDER8
H'FFFA7 NDRA*
2
8
--
--
--
--
--
--
--
--
--
--
--
--
NDER3
NDER2
NDER1
NDER0
H'FFFA8 --
--
--
--
--
--
--
--
--
H'FFFA9 --
--
--
--
--
--
--
--
--
H'FFFAA --
--
--
--
--
--
--
--
--
H'FFFAB --
--
--
--
--
--
--
--
--
H'FFFAC --
--
--
--
--
--
--
--
--
H'FFFAD --
--
--
--
--
--
--
--
--
H'FFFAE --
--
--
--
--
--
--
--
--
H'FFFAF --
--
--
--
--
--
--
--
--
H'FFFB0 SMR
8
C/
A
CHR
PE
O/
E
STOP
MP
CKS1
CKS0
SCI
H'FFFB1 BRR
8
channel 0
H'FFFB2 SCR
8
TIE
RIE
TE
RE
MPIE
TEIE
CKE1
CKE0
H'FFFB3 TDR
8
H'FFFB4 SSR
8
TDRE
RDRF
ORER
FE R/ E RS PER
TEND
MPB
MPBT
H'FFFB5 RDR
8
H'FFFB6 SCMR
8
--
--
--
--
SDIR
SINV
--
SMIF
H'FFFB7 Reserved area (access prohibited)
H'FFFB8 SMR
8
C/
A
CHR
PE
O/
E
STOP
MP
CKS1
CKS0
SCI
H'FFFB9 BRR
8
channel 1
H'FFFBA SCR
8
TIE
RIE
TE
RE
MPIE
TEIE
CKE1
CKE0
H'FFFBB TDR
8
H'FFFBC SSR
8
TDRE
RDRF
ORER
FE R/ E RS PER
TEND
MPB
MPBT
H'FFFBD RDR
8
H'FFFBE SCMR
8
--
--
--
--
SDIR
SINV
--
SMIF
H'FFFBF Reserved area (access prohibited)
643
Address
Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'FFFC0
SMR
8
C/
A
CHR
PE
O/
E
STOP
MP
CKS1
CKS0
SCI
H'FFFC1
BRR
8
channel 2
H'FFFC2
SCR
8
TIE
RIE
TE
RE
MPIE
TEIE
CKE1
CKE0
H'FFFC3
TDR
8
H'FFFC4
SSR
8
TDRE
RDRF
ORER
FER/ E RS PER
TEND
MPB
MPBT
H'FFFC5
RDR
8
H'FFFC6
SCMR
8
--
--
--
--
SDIR
SINV
--
SMIF
H'FFFC7
Reserved area (access prohibited)
H'FFFC8
--
--
--
--
--
--
--
--
--
H'FFFC9
--
--
--
--
--
--
--
--
--
H'FFFCA
--
--
--
--
--
--
--
--
--
H'FFFCB
--
--
--
--
--
--
--
--
--
H'FFFCC
--
--
--
--
--
--
--
--
--
H'FFFCD
--
--
--
--
--
--
--
--
--
H'FFFCE
--
--
--
--
--
--
--
--
--
H'FFFCF
--
--
--
--
--
--
--
--
--
H'FFFD0
Reserved area (access prohibited)
H'FFFD1
H'FFFD2
H'FFFD3
P4DR
8
P4
7
P4
6
P4
5
P4
4
P4
3
P4
2
P4
1
P4
0
Port4
H'FFFD4
Reserved area (access prohibited)
H'FFFD5
P6DR
8
P6
7
P6
6
P6
5
P6
4
P6
3
P6
2
P6
1
P6
0
Port6
H'FFFD6
P7DR
8
P7
7
P7
6
P7
5
P7
4
P7
3
P7
2
P7
1
P7
0
Port7
H'FFFD7
P8DR
8
--
--
--
P8
4
P8
3
P8
2
P8
1
P8
0
Port8
H'FFFD8
P9DR
8
--
--
P9
5
P9
4
P9
3
P9
2
P9
1
P9
0
Port9
H'FFFD9
PADR
8
PA
7
PA
6
PA
5
PA
4
PA
3
PA
2
PA
1
PA
0
PortA
H'FFFDA
PBDR
8
PB
7
PB
6
PB
5
PB
4
PB
3
PB
2
PB
1
PB
0
PortB
H'FFFDB
--
--
--
--
--
--
--
--
--
H'FFFDC
--
--
--
--
--
--
--
--
--
H'FFFDD
--
--
--
--
--
--
--
--
--
H'FFFDE
--
--
--
--
--
--
--
--
--
H'FFFDF
--
--
--
--
--
--
--
--
--
644
Address
Register
Data
Bus
Register Name
Module
(Low)
Name
Width Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
name
H'FFFE0
ADDRAH 8
AD9
AD8
AD7
AD6
AD5
AD4
AD3
AD2
A/D
H'FFFE1
ADDRAL 8
AD1
AD0
--
--
--
--
--
--
converter
H'FFFE2
ADDRBH 8
AD9
AD8
AD7
AD6
AD5
AD4
AD3
AD2
H'FFFE3
ADDRBL 8
AD1
AD0
--
--
--
--
--
--
H'FFFE4
ADDRCH 8
AD9
AD8
AD7
AD6
AD5
AD4
AD3
AD2
H'FFFE5
ADDRCL 8
AD1
AD0
--
--
--
--
--
--
H'FFFE6
ADDRDH 8
AD9
AD8
AD7
AD6
AD5
AD4
AD3
AD2
H'FFFE7
ADDRDL 8
AD1
AD0
--
--
--
--
--
--
H'FFFE8
ADCSR
8
ADF
ADIE
ADST
SCAN
CKS
CH2
CH1
CH0
H'FFFE9
ADCR
8
TRGE
--
--
--
--
--
--
--
Notes: 1. For write access to TCSR, TCNT, and RSTCSR, see section 12.2.4, Notes on Register
Access.
2. The address depends on the output trigger setting.
Legend
WDT: Watchdog timer
TPC:
Programmable timing pattern controller
SCI:
Serial communication interface
645
B.2
Functions
Bit
Initial value
R/W:
0
R/W
7
ICIAE
0
R/W
6
ICIBE
0
R/W
5
ICICE
0
R/W
4
OCIDE
0
R/W
3
OCIAE
1
R/W
2
OCIBE
1
R/W
1
OVIE
1
0
Timer overflow interrupt enable
0
1
Interrupt requested by OVF flag is disabled
Interrupt requested by OVF flag is enabled
Output compare interrupt B enable
0
1
Interrupt requested by OCFB flag is disabled
Interrupt requested by OCFB flag is enabled
Output compare interrupt A enable
0
1
Interrupt requested by OCFA flag is disabled
Interrupt requested by OCFA flag is enabled
Input capture interrupt D enable
0
1
Interrupt requested by ICFD flag is disabled
Interrupt requested by ICFD flag is enabled
TIER--Timer Interrupt Enable Register
H' 90
FRT
Register abbreviation
Register name
Address to which register
is mapped
Name of on-chip
supporting module
Names of the bits.
Dashes (--) indicate
reserved bits.
Full name of bit
Descriptions of
bit settings
Bit numbers
Initial bit values
Possible types of
access
R
W
R/W
Read only
Write only
Read and write

646
P4DDR--Port 4 Data Direction Register
H'EE003
Port 4
Bit
Initial value
Read/Write
0
W
7
P4
7
DDR
0
W
6
P4
6
DDR
0
W
5
P4
5
DDR
0
W
4
P4
4
DDR
0
W
3
P4
3
DDR
0
W
2
P4
2
DDR
0
W
1
P4
1
DDR
0
W
0
P4
0
DDR
Port 4 input/output select
0
1
Generic input
Generic output
P6DDR--Port 6 Data Direction Register
H'EE005
Port 6
Bit
7
--
6
P6
6
DDR
5
P6
5
DDR
4
P6
4
DDR
3
P6
3
DDR
2
P6
2
DDR
1
P6
1
DDR
0
P6
0
DDR
Initial value
Read/Write
0
W
1
--
0
W
0
W
0
W
0
W
0
W
0
W
Port 6 input/output select
0
1
Generic input
Generic output
647
P8DDR--Port 8 Data Direction Register
H'EE007
Port 8
Bit
7
6
5
4
P8
4
DDR
3
P8
3
DDR
2
P8
2
DDR
1
P8
1
DDR
0
P8
0
DDR
Port 8 input/output select
0
1
Generic input
CS
output
Initial value
Read/Write
1
1
1
0
W
0
W
0
W
0
W
Modes 1 to 4
1
W
Port 8 input/output select
0
1
Generic input
Generic output
648
P9DDR--Port 9 Data Direction Register
H'EE008
Port 9
Bit
Initial value
Read/Write
7
1
6
0
W
5
P9
5
DDR
0
W
4
P9
4
DDR
0
W
3
P9
3
DDR
0
W
2
P9
2
DDR
0
W
1
P9
1
DDR
0
W
0
P9
0
DDR
Port 9 input/output select
0
1
Generic input
Generic output
1
PADDR--Port A Data Direction Register
H'EE009
Port A
Bit
Initial value
Read/Write
7
PA
7
DDR
6
PA
6
DDR
5
PA
5
DDR
4
PA
4
DDR
0
W
3
PA
3
DDR
0
W
2
PA
2
DDR
0
W
1
PA
1
DDR
0
W
0
PA
0
DDR
Initial value
Read/Write
1
0
W
0
W
0
W
0
W
Modes 3, 4
Modes 1, 2
0
W
0
W
Port A input/output select
0
1
Generic input pin
Generic output pin
0
W
0
W
0
W
0
W
0
W
PBDDR--Port B Data Direction Register
H'EE00A
Port B
Bit
Initial value
Read/Write
7
PB
7
DDR
0
W
6
PB
6
DDR
0
W
5
PB
5
DDR
0
W
4
PB
4
DDR
0
W
3
PB
3
DDR
0
W
2
PB
2
DDR
0
W
1
PB
1
DDR
0
W
0
PB
0
DDR
Port B input/output select
0
1
Generic input
Generic output
0
W
649
MDCR--Mode Control Register
H'EE011
System control
Bit
Initial value
Read/Write
1
7
1
6
0
5
0
4
0
3
R
2
MDS2
R
1
MDS1
R
0
MDS0
Mode select 2 to 0
0
1
0
1
Operating Mode
*
*
*
Bit 2
MD
2
Bit 1
MD
1
Bit 0
MD
0
0
1
0
1
Mode 1
Mode 2
Mode 3
Mode 4
0
1
0
1
0
1
Note: * Determined by the state of the mode pins (MD2 to MD0).
650
SYSCR--System Control Register
H'EE012
System control
Bit
Initial value
Read/Write
0
R/W
7
SSBY
0
R/W
6
STS2
0
R/W
5
STS1
0
R/W
4
STS0
1
R/W
3
UE
0
R/W
2
NMIEG
0
R/W
1
SSOE
1
R/W
0
RAME
NMI edge select
0
1
An interrupt is requested at the falling edge of NMI
An interrupt is requested at the rising edge of NMI
RAM enable
0
1
On-chip RAM is disabled
On-chip RAM is enabled
User bit enable
0
1
CCR bit 6 (UI) is used as an interrupt mask bit
CCR bit 6 (UI) is used as a user bit
Standby timer select 2 to 0
Bit 6
STS2
Waiting Time = 8,192 states
Waiting Time = 16,384 states
Waiting Time = 32,768 states
Waiting Time = 65,536 states
Waiting Time = 131,072 states
Waiting Time = 26,2144 states
Waiting Time = 1,024 states
Illegal setting
Bit 5
STS1
Bit 4
STS0
Standby Timer
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Software standby
0
1
SLEEP instruction causes transition to sleep mode
SLEEP instruction causes transition to software standby mode
Software standby output port enable
0
1
In software standby mode,
all address bus and bus
control signals are high-
impedance
In software standby mode,
address bus retains output
state and bus control
signals are fixed high
651
BRCR--Bus Release Control Register
H'EE013
Bus controller
Bit
7
A23E
6
A22E
5
A21E
4
A20E
3
2
1
0
BRLE
Initial value
Read/Write
1
1
1
1
1
1
1
0
R/W
Modes
1, 2
Address 23 to 20 enable
0
1
Address output
Other input/output
Bus release enable
0
1
The bus cannot be
released to an
external device
The bus can be
released to an
external device
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
0
1
1
1
0
R/W
Modes
3, 4
ISCR--IRQ Sense Control Register
H'EE014
Interrupt Controller
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
0
R/W
5
IRQ5SC
0
R/W
4
IRQ4SC
0
R/W
3
IRQ3SC
0
R/W
2
IRQ2SC
0
R/W
1
IRQ1SC
0
R/W
0
IRQ0SC
IRQ
5
to IRQ
0
sense control
0
1
Interrupts are requested when
IRQ
5
to
IRQ
0
are low
Interrupts are requested by falling-edge input at
IRQ
5
to
IRQ
0
652
IER--IRQ Enable Register
H'EE015
Interrupt Controller
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
0
R/W
5
IRQ5E
0
R/W
4
IRQ4E
0
R/W
3
IRQ3E
0
R/W
2
IRQ2E
0
R/W
1
IRQ1E
0
R/W
0
IRQ0E
IRQ
5
to IRQ
0
enable
0
1
IRQ
5
to IRQ
0
interrupts are disabled
IRQ
5
to IRQ
0
interrupts are enabled
ISR--IRQ Status Register
H'EE016
Interrupt Controller
Bit
Initial value
Read/Write
0
7
0
6
0
R/(W)*
5
IRQ5F
0
R/(W)*
4
IRQ4F
0
R/(W)*
3
IRQ3F
0
R/(W)*
2
IRQ2F
0
R/(W)*
1
IRQ1F
0
R/(W)*
0
IRQ0F
IRQ5 to IRQ0 flags
0
Note: * Only 0 can be written, to clear the flag.
Bits 5 to 0
IRQ5F to IRQ0F
Setting and Clearing Conditions
1
(n = 5 to 0)
[Clearing conditions]
∑ Read IRQnF when IRQnF = 1, then write 0 in IRQnF.
∑ IRQnSC = 0,
IRQn
input is high, and interrupt exception
handling is being carried out.
∑ IRQnSC = 1 and IRQn interrupt exception handling is being
carried out.
[Setting conditions]
∑ IRQnSC = 0 and
IRQn
input is low.
∑ IRQnSC = 1 and
IRQn
input changes from high to low.
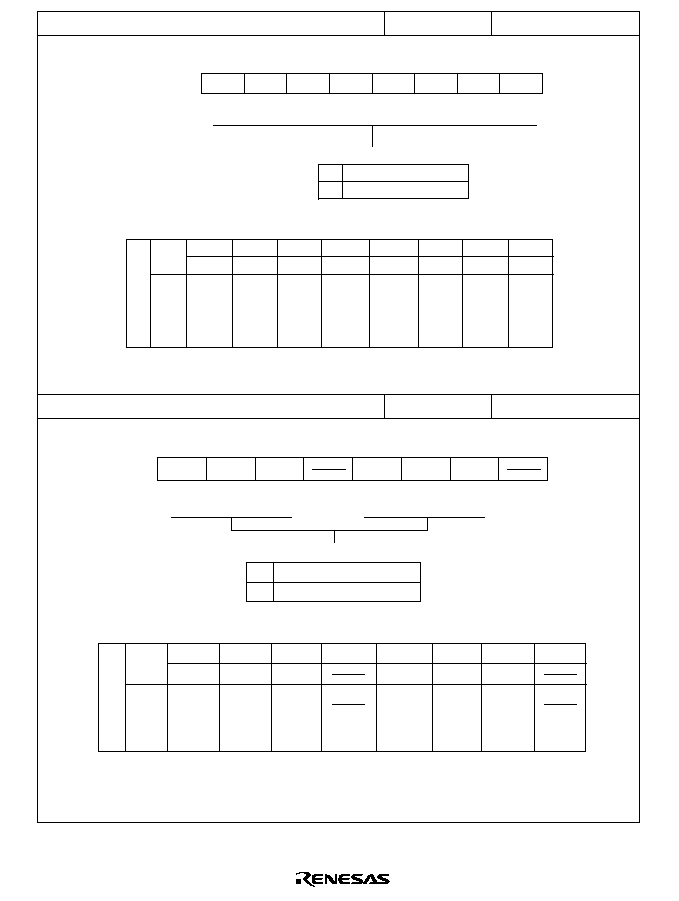
653
IPRA--Interrupt Priority Register A
H'EE018
Interrupt Controller
Bit
Initial value
Read/Write
0
R/W
7
IPRA7
0
R/W
6
IPRA6
0
R/W
5
IPRA5
0
R/W
4
IPRA4
0
R/W
3
IPRA3
0
R/W
2
IPRA2
0
R/W
1
IPRA1
0
R/W
0
IPRA0
Priority level A7 to A0
0
1
Priority level 0 (low priority)
Priority level 1 (high priority)
∑ Interrupt sources controlled by each bit
IPRA
Bit
Interrupt
source
Bit 7
IPRA7
IRQ
0
Bit 6
IPRA6
IRQ
1
Bit 5
IPRA5
IRQ
2
,
IRQ
3
Bit 4
IPRA4
IRQ
4
,
IRQ
5
Bit 3
IPRA3
Bit 2
IPRA2
Bit 1
IPRA1
Bit 0
IPRA0
WDT,
DRAM
interface,
A/D converter
16-bit
timer
channel 0
16-bit
timer
channel 1
16-bit
timer
channel 2
IPRB--Interrupt Priority Register B
H'EE019
Interrupt Controller
Bit
Initial value
Read/Write
0
R/W
7
IPRB7
0
R/W
6
IPRB6
0
R/W
5
IPRB5
0
R/W
4
0
R/W
3
IPRB3
0
R/W
2
IPRB2
0
R/W
1
IPRB1
0
R/W
0
Priority level B7 to B5, B3 to B1
0
1
Priority level 0 (low priority)
Priority level 1 (high priority)
Bit 7
IPRB7
Bit 6
IPRB6
Bit 5
IPRB5
Bit 4
Bit 3
IPRB3
Bit 2
IPRB2
Bit 1
IPRB1
Bit 0
8-bit timer
channels
0 and 1
8-bit timer
channels
2 and 3
DMAC
SCI
channel 0
SCI
channel 1
SCI
channel 2
∑ Interrupt sources controlled by each bit
IPRB
Bit
Interrupt
source
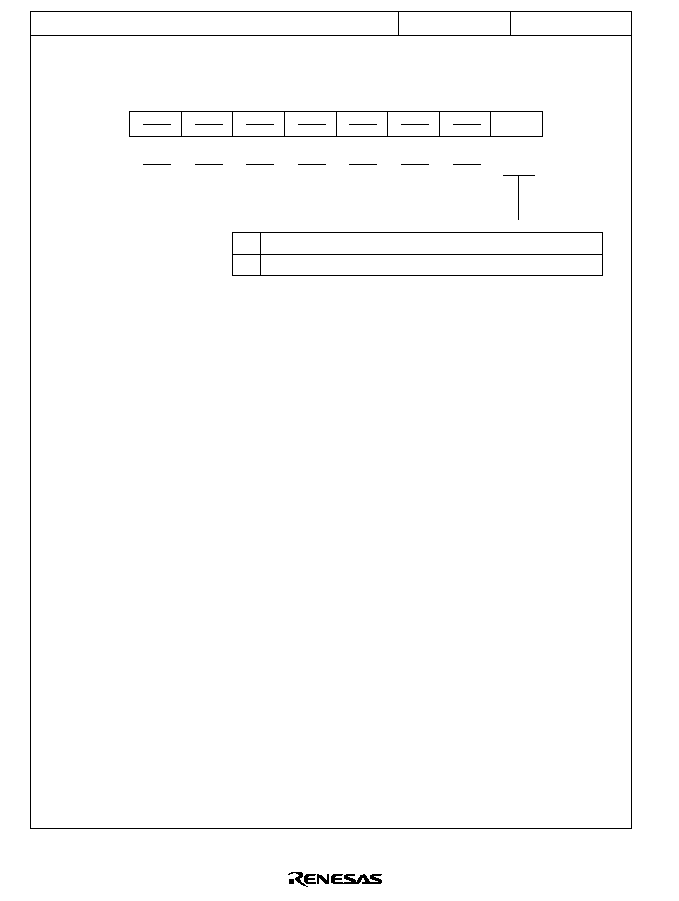
654
DASTCR--D/A Standby Control Register
H'EE01A
D/A converter
Bit
Initial value
Read/Write
1
7
1
6
1
5
1
4
1
3
1
2
1
1
0
R/W
0
DASTE
D/A standby enable
0
1
D/A output is disabled in software standby mode
D/A output is enabled in software standby mode
(Initial value)

655
DIVCR--Division Control Register
H'EE01B
System control
Bit
Initial value
Read/Write
1
7
1
6
1
5
1
4
1
3
1
2
0
R/W
1
DIV1
0
R/W
0
DIV0
Divide 1 and 0
Frequency Division Ratio
Bit 1
DIV1
Bit 0
DIV0
1/1
1/2
1/4
1/8
0
1
0
1
0
1
(Initial value)
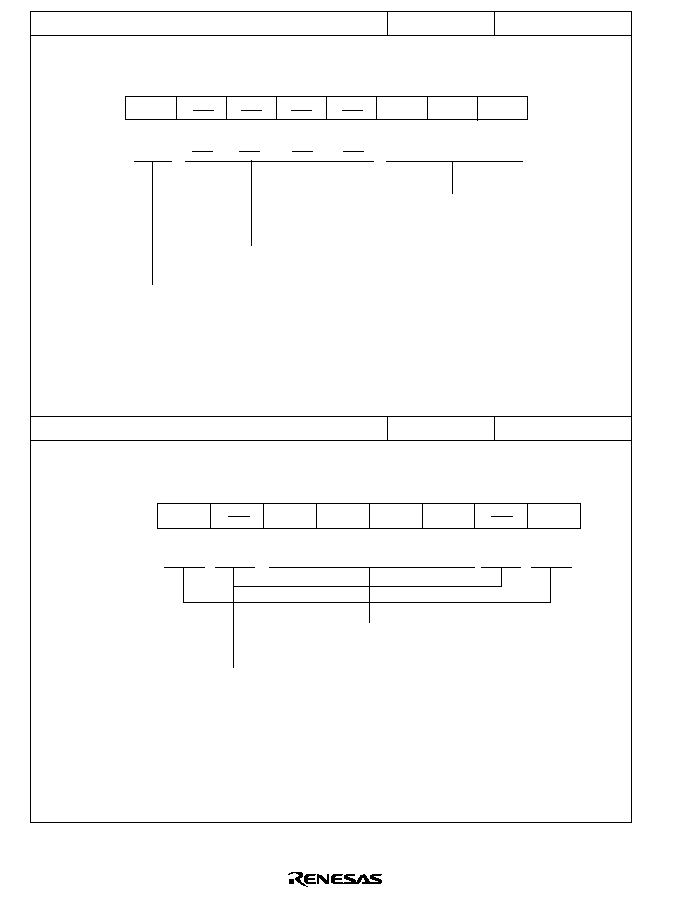
656
MSTCRH--Module Standby Control Register H
H'EE01C
System control
7
6
5
4
3
2
1
0
PSTOP
MSTPH2 MSTPH1 MSTPH0
R/W
R/W
R/W
R/W
0
1
1
1
1
0
0
0
Module standby H2 to H0
Selection bits for placing modules
in standby state.
Bit
Initial value
Read/Write
Reserved bits
clock stop
Enables or disables ¯ clock output.
MSTCRL--Module Standby Control Register L
H'EE01D
System control
7
6
5
4
3
2
1
0
MSTPL7
MSTPL2
MSTPL3
MSTPL4
MSTPL5
MSTPL0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
Module standby L7, L5 to L2, L0
Selection bits for placing modules
in standby state.
Reserved bits
Bit
Initial value
Read/Write
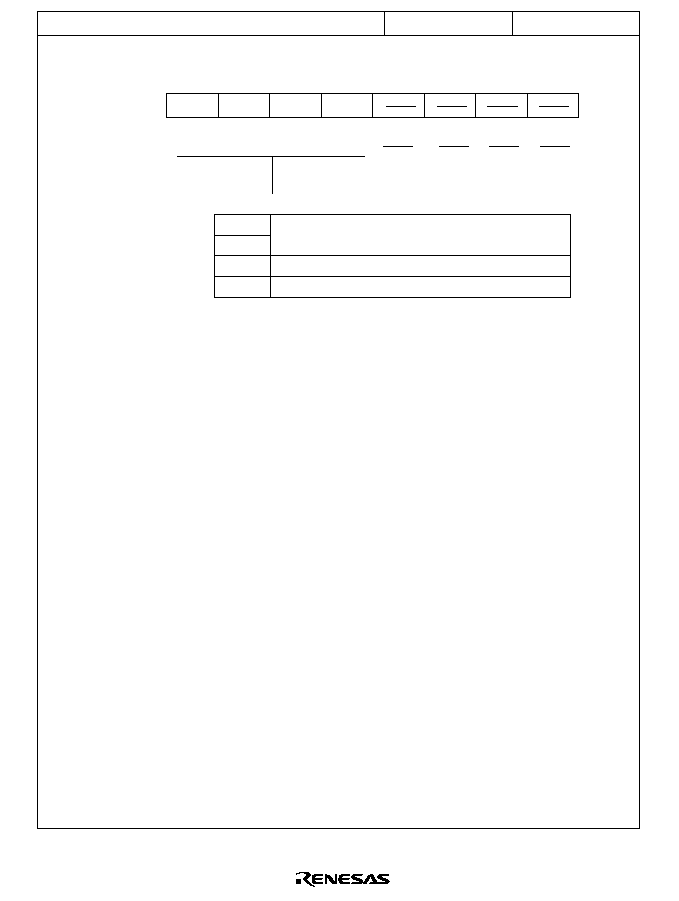
657
CSCR--Chip Select Control Register
H'EE01F
Bus controller
Bit
Initial value
Read/Write
0
R/W
7
CS7E
(n = 7 to 4)
0
R/W
6
CS6E
0
R/W
5
CS5E
0
R/W
4
CS4E
1
3
1
2
1
1
1
0
Chip select 7 to 4 enable
Description
Bit n
CSnE
Output of chip select signal CSn is disabled (Initial value)
Output of chip select signal CSn is enabled
0
1

658
ABWCR--Bus Width Control Register
H'EE020
Bus controller
Bit
Initial value
Initial value
Read/Write
1
0
R/W
7
ABW7
1
0
R/W
6
ABW6
1
0
R/W
5
ABW5
1
0
R/W
4
ABW4
1
0
R/W
3
ABW3
1
0
R/W
2
ABW2
1
0
R/W
1
ABW1
1
0
R/W
0
ABW0
Area 7 to 0 bus width control
Bus Width of Access Area
Bits 7 to 0
ABW7
to ABW0
Areas 7 to 0 are 16-bit access areas
Areas 7 to 0 are 8-bit access areas
0
1
Modes 1, 3
Modes 2, 4
ASTCR--Access State Control Register
H'EE021
Bus controller
Bit
Initial value
Read/Write
1
R/W
7
AST7
1
R/W
6
AST6
1
R/W
5
AST5
1
R/W
4
AST4
1
R/W
3
AST3
1
R/W
2
AST2
1
R/W
1
AST1
1
R/W
0
AST0
Area 7 to 0 access state control
Number of States in Access Area
Bits 7 to 0
AST7
to AST0
Areas 7 to 0 are two-state access areas
Areas 7 to 0 are three-state access areas
0
1
659
WCRH--Wait Control Register H
H'EE022
Bus controller
1
R/W
7
W71
1
R/W
6
W70
1
R/W
5
W61
1
R/W
4
W60
1
R/W
3
W51
1
R/W
2
W50
1
R/W
1
W41
1
R/W
0
W40
0
Area 4 wait control 1 and 0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
0
Area 5 wait control 1 and 0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
0
Area 6 wait control 1 and 0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
0
Area 7 wait control 1 and 0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
Bit
Initial value
Read/Write
660
WCRL--Wait Control Register L
H'EE023
Bus controller
Bit
Initial value
Read/Write
1
R/W
7
W31
1
R/W
6
W30
1
R/W
5
W21
1
R/W
4
W20
1
R/W
3
W11
1
R/W
2
W10
1
R/W
1
W01
1
R/W
0
W00
Area 0 wait control 1 and 0
0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
Area 1 wait control 1 and 0
0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
Area 2 wait control 1 and 0
0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
Area 3 wait control 1 and 0
0
0
1
0
1
No program wait is inserted
1 program wait state is inserted
2 program wait states are inserted
3 program wait states are inserted
1
661
BCR--Bus Control Register
H'EE024
Bus controller
Bit
Initial value
Read/Write
1
R/W
7
ICIS1
1
R/W
6
ICIS0
0
R/W
5
BROME
0
R/W
4
BRSTS1
0
R/W
3
BRSTS0
1
--
2
--
1
R/W
1
RDEA
0
R/W
0
WAITE
0
1
WAIT pin wait input is disabled
WAIT pin wait input is enabled
Burst cycle select 1
0
1
Burst access cycle comprises 2 states
Burst access cycle comprises 3 states
Burst ROM enable
0
1
Area 0 is a basic bus interface area
Area 0 is a burst ROM interface area
Idle cycle insertion 0
0
1
No idle cycle is inserted in case of consecutive external read and write cycles
Idle cycle is inserted in case of consecutive external read and write cycles
Idle cycle insertion 1
0
1
No idle cycle is inserted in case of consecutive external read cycles for different areas
Idle cycle is inserted in case of consecutive external read cycles for different areas
Burst cycle select 0
0
1
Max. 4 words in burst access
Max. 8 words in burst access
Area division unit select
0
1
Area divisions are as follows:
Areas 0 to 7 are the same size
(2 Mbytes )
Wait pin enable
Area 0: 2 Mbytes Area 4: 1.93 Mbytes
Area 1: 2 Mbytes Area 5: 4 kbytes
Area 2: 8 Mbytes Area 6: 23.75 kbytes
Area 3: 2 Mbytes Area 7: 22 bytes
662
DRCRA--DRAM Control Register A
H'EE026
DRAM interface
7
DRAS2
0
R/W
6
DRAS1
0
R/W
5
DRAS0
0
R/W
4
1
3
BE
0
R/W
2
RDM
0
R/W
1
SRFMD
0
R/W
0
RFSHE
0
R/W
Bit
Initial value
Read/Write
Refresh pin enable
0
1
Self-refresh mode
0
1
RAS down mode
0
1
Burst access enable
0
1
RFSH
pin refresh signal output is disabled
RFSH
pin refresh signal output is enabled
DRAM self-refreshing is disabled in
software standby mode
DRAM self-refreshing is enabled
in software standby mode
DRAM interface: RAS up mode selected
DRAM interface: RAS down mode selected
Burst disabled (always full access)
DRAM space access performed in fast page mode
DRAM area select
* A single
CS
n
pin serves as a common
RAS
output pin for a number of areas.
Unused
CS
n
pins can be used as input/output ports.
0
0
1
0
1
0
1
0
1
0
1
0
1
1
DRAS2 DRAS1 DRAS0
Area 5
Normal
Normal
Normal
Normal
Normal
DRAM space
(
CS
5
)
Area 4
Normal
Normal
Normal
Normal
DRAM space
(
CS
4
)
DRAM space
(
CS
4
)
Area 3
Normal
Normal
DRAM space
(
CS
3
)
DRAM space
(
CS
3)
DRAM space
(
CS
3
)
Area 2
Normal
DRAM space
(
CS
2
)
DRAM space
(
CS
2
)
DRAM space
(
CS
2
)
DRAM space
(
CS
2
)
DRAM space(
CS
2
)*
DRAM space(
CS
4
)*
DRAM space(
CS
2
)*
DRAM space(
CS
2
)*

663
DRCRB--DRAM Control Register B
H'EE027
DRAM interface
7
MXC1
0
R/W
6
MXC0
0
R/W
5
CSEL
0
R/W
4
RCYCE
0
R/W
3
1
2
TPC
0
R/W
1
RCW
0
R/W
0
RLW
0
R/W
Bit
Initial value
Read/Write
Refresh cycle wait control
0
1
RAS-CAS wait
TP cycle control
0
1
Refresh cycle enable
0
1
Wait state (T
RW
) insertion is disabled
1 wait state (T
RW
) is inserted
1-state precharge cycle is inserted
2-state precharge cycle is inserted
Refresh cycles are disabled
DRAM refresh cycles are enabled
Multiplex control 1 and 0
0
0
1
0
1
1
MXC1
MXC0
Wait state (T
rW
) insertion is disabled
1 wait state (T
rW
) is inserted
0
1
CAS
output pin select
0
1
PB4 and PB5 selected as
UCAS
and
LCAS
output pins
HWR
and
LWR
selected as
UCAS
and
LCAS
output pins
Column address: 8 bits
Compared address:
Modes 1, 2
8-bit access space
A
19
to A
8
16-bit access space
A
19
to A
9
Modes 3, 4
8-bit access space
A
23
to A
8
16-bit access space
A
23
to A
9
Column address: 9 bits
Compared address:
Modes 1, 2
8-bit access space
A
19
to A
9
16-bit access space
A
19
to A
10
Modes 3, 4
8-bit access space
A
23
to A
9
16-bit access space
A
23
to A
10
Column address: 10 bits
Compared address:
Modes 1, 2
8-bit access space
A
19
to A
10
16-bit access space
A
19
to A
11
Modes 3, 4
8-bit access space
A
23
to A
10
16-bit access space
A
23
to A
11
Illegal setting
Description

664
RTMCSR--Refresh Timer Control/Status Register
H'EE028
DRAM interface
7
CMF
0
R/(W)*
6
CMIE
0
R/W
5
CKS2
0
4
CKS1
0
3
CKS0
0
2
1
1
1
0
1
Bit
Initial value
Read/Write
R/W
R/W
R/W
Refresh counter clock select
0
0
1
0
1
0
1
0
1
0
1
0
1
1
CKS2
CKS1
CKS0
Count operation halted
/2 used as counter clock
/8 used as counter clock
/32 used as counter clock
/128 used as counter clock
/512 used as counter clock
/2048 used as counter clock
/4096 used as counter clock
Compare match interrupt enable
0
1
The CMI interrupt requested by the CMF flag is disabled
The CMI interrupt requested by the CMF flag is enabled
Compare match flag
0
1
[Clearing conditions]
∑ Cleared by a reset and in standby mode
∑ Cleared by reading CMF when CMF = 1, then writing 0 in CMF
[Setting condition]
When RTCNT = RTCOR
Description
Note: Only 0 can be written to clear the flag.
665
RTCNT--Refresh Timer Counter
H'EE029
DRAM interface
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
2
0
R/W
1
0
R/W
0
0
R/W
Bit
Initial value
Read/Write
Incremented by internal clock selected
by bits CKS2 to CKS0 in RTMCSR
RTCOR--Refresh Time Constant Register
H'EE02A
DRAM interface
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
1
R/W
Bit
Initial value
Read/Write
RTCNT compare match period
Note: Only byte access should be used with this register.

666
P4PCR--Port 4 Input Pull-Up Control Register
H'EE03E
Port 4
Bit
Initial value
Read/Write
0
R/W
7
P4
7
PCR
0
R/W
6
P4
6
PCR
0
R/W
5
P4
5
PCR
0
R/W
4
P4
4
PCR
0
R/W
3
P4
3
PCR
0
R/W
2
P4
2
PCR
0
R/W
1
P4
1
PCR
0
R/W
0
P4
0
PCR
Port 4 input pull-up control 7 to 0
0
1
Input pull-up transistor is off
Input pull-up transistor is on
Note: Valid when the corresponding P4DDR bit is cleared to 0
(designating generic input).
MAR0A R/E/H/L--Memory Address Register 0A R/E/H/L
H'FFF20 H'FFF21
H'FFF22 H'FFF23
DMAC0
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
1
1
1
1
1
1
1
1
MAR0AR
MAR0AE
Undetermined
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MAR0AH
MAR0AL
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Undetermined
Source or destination address
667
ETCR0A H/L--Execute Transfer Count Register 0A H/L
H'FFF24 H'FFF25
DMAC0
∑
Short address mode
I/O mode and idle mode
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Transfer counter
Repeat mode
Bit
Initial value
Read/Write
7
6
5
4
3
2
1
0
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Transfer counter
7
6
5
4
3
2
1
0
ETCR0AH
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Initial count
ETCR0AL
∑
Full address mode
Normal mode
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Undetermined
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Transfer counter
Block transfer mode
Bit
Initial value
Read/Write
7
6
5
4
3
2
1
0
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Block size counter
7
6
5
4
3
2
1
0
ETCR0AH
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Initial block size
ETCR0AL

668
IOAR0A--I/O Address Register 0A
H'FFF26
DMAC0
Bit
Initial value
Read/Write
R/W
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
2
R/W
1
R/W
0
Short address mode : source or destination address
Full address mode
: not used
Undetermined
669
DTCR0A--Data Transfer Control Register 0A
H'FFF27
DMAC0
∑
Short address mode
Bit
Initial value
Read/Write
0
R/W
7
DTE
0
R/W
6
DTSZ
0
R/W
5
DTID
0
R/W
4
RPE
0
R/W
3
DTIE
0
R/W
2
DTS2
0
R/W
1
DTS1
0
R/W
0
DTS0
Data transfer interrupt enable
0
Interrupt requested by
DTE bit is disabled
1
Interrupt requested by
DTE bit is enabled
Repeat enable
0
I/O mode
1
Repeat mode
Idle mode
0
1
RPE DTIE
Description
0
1
Data transfer increment/decrement
0
Incremented: If DTSZ = 0, MAR is incremented by 1 after each transfer
If DTSZ = 1, MAR is incremented by 2 after each transfer
1
Decremented: If DTSZ = 0, MAR is decremented by 1 after each transfer
If DTSZ = 1, MAR is decremented by 2 after each transfer
Data transfer size
0
1
Byte-size transfer
Word-size transfer
Data transfer enable
0
1
Data transfer is disabled
Data transfer is enabled
Data transfer select
Bit 2
DTS2
Bit 1
DTS1
Bit 0
DTS0
0
1
Compare match/input capture A
interrupt from 16-bit timer channel 0
Compare match/input capture A
interrupt from 16-bit timer channel 1
Compare match/input capture A
interrupt from 16-bit timer channel 2
A/D converter conversion end interrupt
SCI0 transmit-data-empty interrupt
SCI0 receive-data-full interrupt
Transfer in full address mode
Transfer in full address mode
0
1
0
1
0
1
0
1
Data Transfer Activation Source
0
1
0
1
670
DTCR0A--Data Transfer Control Register 0A (cont)
H'FFF27
DMAC0
∑
Full address mode
Bit
Initial value
Read/Write
0
R/W
7
DTE
0
R/W
6
DTSZ
0
R/W
5
SAID
0
R/W
4
SAIDE
0
R/W
3
DTIE
0
R/W
2
DTS2A
0
R/W
1
DTS1A
0
R/W
0
DTS0A
Data transfer select 0A
Bit 4
SAIDE
0
MARA is held fixed
Incremented: If DTSZ = 0, MARA is incremented by 1 after each transfer
If DTSZ = 1, MARA is incremented by 2 after each transfer
0
1
Increment/Decrement Enable
Data transfer size
0
1
Byte-size transfer
Word-size transfer
Data transfer enable
0
1
Data transfer is disabled
Data transfer is enabled
0
1
Normal mode
Block transfer mode
Data transfer select 2A and 1A
Set both bits to 1
Data transfer interrupt enable
0
1
Interrupt requested by DTE bit is disabled
Interrupt requested by DTE bit is enabled
Source address increment/decrement (bit 5)
Source address increment/decrement enable (bit 4)
1
0
1
MARA is held fixed
Decremented: If DTSZ = 0, MARA is decremented by 1 after each transfer
If DTSZ = 1, MARA is decremented by 2 after each transfer
Bit 5
SAID

671
MAR0B R/E/H/L--Memory Address Register 0B R/E/H/L
H'FFF28 H'FFF29
H'FFF2A H'FFF2B
DMAC0
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
1
1
1
1
1
1
1
1
MAR0BR
MAR0BE
Undetermined
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MAR0BH
MAR0BL
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Undetermined
Source or destination address

672
ETCR0B H/L--Execute Transfer Count Register 0B H/L
H'FFF2C, H'FFF2D
DMAC0
∑
Short address mode
I/O mode and idle mode
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Bit
Initial value
Read/Write
Undetermined
Transfer counter
Repeat mode
:
7
6
5
4
3
2
1
0
R/W R/W
R/W R/W R/W R/W
R/W
R/W
7
6
5
4
3
2
1
0
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Bit
Initial value
Read/Write
Undetermined
Transfer counter
ETCR0BH
Undetermined
Initial count
ETCR0BL
∑
Full address mode
Normal mode
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Undetermined
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Not used
Block transfer mode
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Undetermined
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Block transfer counter

673
IOAR0B--I/O Address Register 0B
H'FFF2E
DMAC0
Bit
Initial value
Read/Write
R/W
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
2
R/W
1
R/W
0
Short address mode : source or destination address
Full address mode
: not used
Undetermined
674
DTCR0B--Data Transfer Control Register 0B
H'FFF2F
DMAC0
∑
Short address mode
Bit
Initial value
Read/Write
0
R/W
7
DTE
0
R/W
6
DTSZ
0
R/W
5
DTID
0
R/W
4
RPE
0
R/W
3
DTIE
0
R/W
2
DTS2
0
R/W
1
DTS1
0
R/W
0
DTS0
Data transfer select
Bit 2
DTS2
Bit 1
DTS1
Bit 0
DTS0
1
0
1
0
1
Compare match/input capture A interrupt
from 16-bit timer channel 0
Compare match/input capture A interrupt
from 16-bit timer channel 1
Compare match/input capture A interrupt
from 16-bit timer channel 2
A/D converter conversion end interrupt
SCI0 transmit-data-empty interrupt
SCI0 receive-data-full interrupt
Falling edge of
DREQ
input
Low level of
DREQ
input
0
1
0
1
0
1
Data Transfer Activation Source
Data transfer interrupt enable
0
Interrupt requested by
DTE bit is disabled
1
Interrupt requested by
DTE bit is enabled
Repeat enable
0
I/O mode
1
Repeat mode
Idle mode
0
1
RPE DTIE
Description
0
1
Data transfer increment/decrement
0
Incremented: If DTSZ = 0, MAR is incremented by 1 after each transfer
If DTSZ = 1, MAR is incremented by 2 after each transfer
1
Decremented: If DTSZ = 0, MAR is decremented by 1 after each transfer
If DTSZ = 1, MAR is decremented by 2 after each transfer
Data transfer size
0
1
Byte-size transfer
Word-size transfer
Data transfer enable
0
1
Data transfer is disabled
Data transfer is enabled
0
1
0

675
DTCR0B--Data Transfer Control Register 0B (cont)
H'FFF2F
DMAC0
∑
Full address mode
Bit
Initial value
Read/Write
0
R/W
7
DTME
0
R/W
6
0
R/W
5
DAID
0
R/W
4
DAIDE
0
R/W
3
TMS
0
R/W
2
DTS2B
0
R/W
1
DTS1B
0
R/W
0
DTS0B
Data transfer select 2B to 0B
Bit 2
DTS2B
Bit 1
DTS1B
Bit 0
DTS0B
0
0
1
0
1
Data Transfer Activation Source
Transfer mode select
0
1
Destination is the block area in block transfer mode
Source is the block area in block transfer mode
Data transfer master enable
0
1
Data transfer is disabled
Data transfer is enabled
Compare match/input capture A
interrupt from 16-bit timer channel 0
Normal Mode
Block Transfer Mode
Auto-request (burst mode)
Compare match/input capture A
interrupt from 16-bit timer channel 1
Not available
Compare match/input capture A
interrupt from 16-bit timer channel 2
Auto-request (cycle-steal mode)
A/D converter conversion end interrupt
Not available
Not available
Falling edge of
DREQ
input
Not available
Not available
Not available
Not available
Falling edge of
DREQ
input
Low level input at
DREQ
input
0
1
0
1
0
Bit 4
DAIDE
0
MARB is held fixed
Incremented: If DTSZ = 0, MARB is incremented by 1 after each transfer
If DTSZ = 1, MARB is incremented by 2 after each transfer
MARB is held fixed
Decremented: If DTSZ = 0, MARB is decremented by 1 after each transfer
If DTSZ = 1, MARB is decremented by 2 after each transfer
0
1
Increment/Decrement Enable
Destination address increment/decrement (bit 5)
Destination address increment/decrement enable (bit 4)
1
0
1
Bit 5
DAID
1
0
1
1
676
MAR1A R/E/H/L--Memory Address Register 1A R/E/H/L
H'FFF30 H'FFF31
H'FFF32 H'FFF33
DMAC1
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
1
1
1
1
1
1
1
1
MAR1AR
MAR1AE
Undetermined
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MAR1AH
MAR1AL
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Undetermined
Note: Bit functions are the same as for DMAC0.
ETCR1A H/L--Execute Transfer Count Register 1A H/L
H'FFF34 H'FFF35
DMAC1
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Undetermined
Note: Bit functions are the same as for DMAC0.
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Bit
Initial value
Read/Write
7
6
5
4
3
2
1
0
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
7
6
5
4
3
2
1
0
ETCR1AH
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
ETCR1AL

677
IOAR1A--I/O Address Register 1A
H'FFF36
DMAC1
Bit
Initial value
Read/Write
R/W
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
2
R/W
1
R/W
0
Note: Bit functions are the same as for DMAC0.
Undetermined
DTCR1A--Data Transfer Control Register 1A
H'FFF37
DMAC1
∑
Short address mode
Bit
Initial value
Read/Write
0
R/W
7
DTE
0
R/W
6
DTSZ
0
R/W
5
DTID
0
R/W
4
RPE
0
R/W
3
DTIE
0
R/W
2
DTS2
0
R/W
1
DTS1
0
R/W
0
DTS0
∑
Full address mode
Bit
Initial value
Read/Write
0
R/W
7
DTE
0
R/W
6
DTSZ
0
R/W
5
SAID
0
R/W
4
SAIDE
0
R/W
3
DTIE
0
R/W
2
DTS2A
0
R/W
1
DTS1A
0
R/W
0
DTS0A
Note: Bit functions are the same as for DMAC0.

678
MAR1B R/E/H/L--Memory Address Register 1B R/E/H/L
H'FFF38 H'FFF39
H'FFF3A H'FFF3B
DMAC1
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
1
1
1
1
1
1
1
1
MAR1BR
MAR1BE
Undetermined
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MAR1BH
MAR1BL
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Undetermined
Note: Bit functions are the same as for DMAC0.
ETCR1B H/L--Execute Transfer Count Register 1B H/L
H'FFF3C H'FFF3D
DMAC1
Bit
Initial value
Read/Write
R/W R/W
R/W R/W R/W R/W
R/W
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Undetermined
Note: Bit functions are the same as for DMAC0.
R/W R/W
R/W R/W R/W R/W
R/W
R/W
Bit
Initial value
Read/Write
7
6
5
4
3
2
1
0
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
7
6
5
4
3
2
1
0
ETCR1BH
Undetermined
R/W R/W
R/W R/W R/W R/W
R/W
R/W
ETCR1BL
679
IOAR1B--I/O Address Register 1B
H'FFF3E
DMAC1
Note: Bit functions are the same as for DMAC0.
R/W
7
R/W
6
R/W
5
R/W
4
R/W
3
R/W
2
R/W
1
R/W
0
Bit
Initial value
Read/Write
Undetermined
DTCR1B--Data Transfer Control Register 1B
H'FFF3F
DMAC1
∑
Short address mode
R/W
7
DTE
0
R/W
6
DTSZ
0
R/W
5
DTID
0
R/W
4
RPE
0
R/W
3
DTIE
0
R/W
2
DTS2
0
R/W
1
DTS1
0
R/W
0
DTS0
0
Bit
Initial value
Read/Write
∑
Full address mode
Note: Bit functions are the same as for DMAC0.
R/W
7
DTME
0
R/W
6
0
R/W
5
DAID
0
R/W
4
DAIDE
0
R/W
3
TMS
0
R/W
2
DTS2B
0
R/W
1
DTS1B
0
0
R/W
0
DTS0B
Bit
Initial value
Read/Write

680
TSTR--Timer Start Register
H'FFF60
16-Bit Timer (Common)
7
1
6
1
Reserved bits
0
1
0
1
0
1
5
1
4
1
3
1
R/W
2
STR2
0
R/W
1
STR1
0
R/W
0
STR0
0
Bit
Counter start 1
Counter start 2
Counter start 0
16TCNT0 count halted (Initial value)
16TCNT0 counting
16TCNT1 count halted (Initial value)
16TCNT1 counting
16TCNT2 count halted (Initial value)
16TCNT2 countIng
Initial value
Read/Write
681
TSNC--Timer Syncro Register
H'FFF61
16-Bit Timer (Common)
7
1
6
1
Reserved bits
0
1
5
1
4
1
3
1
R/W
2
SYNC2
0
R/W
1
SYNC1
0
R/W
0
SYNC0
0
Bit
Timer sync 0
Channel 0 timer counter (16TCNT0) operates independently
(16TCNT0 presetting/clearing unrelated to other channels) (Initial value)
Channel 0 operates synchronously
16TCNT0 synchronous presetting/synchronous clearing possible
Initial value
Read/Write
0
1
Timer sync 1
Channel 1 timer counter (16TCNT1) operates independently
(16TCNT1 presetting/clearing unrelated to other channels) (Initial value)
Channel 1 operates synchronously
16TCNT1 synchronous presetting/synchronous clearing possible
0
1
Timer sync 2
Channel 2 timer counter (16TCNT2) operates independently
(16TCNT2 presetting/clearing unrelated to other channels) (Initial value)
Channel 2 operates synchronously
16TCNT2 synchronous presetting/synchronous clearing possible

682
TMDR--Timer Mode Register
H'FFF62
16-Bit Timer (Common)
7
1
R/W
6
MDF
0
R/W
0
1
5
FDIR
0
4
1
3
1
0
R/W
2
PWM2
R/W
1
PWM1
0
R/W
0
PWM0
0
Bit
PWM mode 0
Normal operation selected for channel 0 (Initial value)
PWM mode selected for channel 0
Initial value
Read/Write
0
1
PWM mode 1
Normal operation selected for channel 1 (Initial value)
PWM mode selected for channel 1
0
1
PWM mode 2
Normal operation selected for channel 2 (Initial value)
PWM mode selected for channel 2
Flag direction
TISRC OVF flag set to 1 when 16TCNT2 overflows or underflows (Initial value)
TISRC OVF flag set to 1 when 16TCNT2 overflows
0
1
Phase counting mode
Normal operation selected for channel 2 (Initial value)
Phase counting mode selected for channel 2
0
1
683
TOLR--Timer Output Level Setting Register
H'FFF63
16-Bit Timer (Common)
7
1
6
1
W
0
1
5
TOB2
0
W
4
TOA2
0
W
3
TOB1
0
0
W
2
TOA1
W
1
TOB0
0
W
0
TOA0
0
Bit
Output level setting A0
TIOCA0 set to 0 output (Initial value)
TIOCA0 set to 1 output
Initial value
Read/Write
0
1
Output level setting B0
TIOCB0 set to 0 output (Initial value)
TIOCB0 set to 1 output
0
1
Output level setting A1
TIOCA1 set to 0 output (Initial value)
TIOCA1 set to 1 output
0
1
Output level setting B1
TIOCB1 set to 0 output (Initial value)
TIOCB1 set to 1 output
0
1
Output level setting A2
TIOCA2 set to 0 output (Initial value)
TIOCA2 set to 1 output
0
1
Output level setting B2
TIOCB2 set to 0 output (Initial value)
TIOCB2 set to 1 output
684
TISRA--Timer Interrupt Status Register A
H'FFF64
16-Bit Timer (Common)
7
1
6
IMIEA2
0
R/W
5
IMIEA1
0
R/W
4
IMIEA0
0
3
1
2
IMFA2
0
R/(W)*
1
IMFA1
0
R/(W)*
0
IMFA0
0
R/(W)*
Bit
Initial value
Read/Write
R/W
Input capture/compare match flag A0
0
1
[Clearing conditions] (Initial value)
∑ Read IMFA0 when IMFA0 =1, then write 0 in IMFA0
∑ DMAC activated by IMIA0 interrupt
[Setting conditions]
∑ 16TCNT0 = GRA0 when GRA0 functions as an output
compare register.
∑ 16TCNT0 value is transferred to GRA0 by an input
capture signal when GRA0 functions as an input
capture register.
Input capture/compare match flag A1
0
1
[Clearing conditions] (Initial value)
∑ Read IMFA1 when IMFA1 =1, then write 0 in IMFA1
∑ DMAC activated by IMIA1 interrupt
[Setting conditions]
∑ 16TCNT1 = GRA1 when GRA1 functions as an output
compare register
∑ 16TCNT1 value is transferred to GRA1 by an input capture
signal when GRA1 functions as an input capture register
Input capture/compare match flag A2
0
1
[Clearing conditions] (Initial value)
∑ Read IMFA2 when IMFA2 =1, then write 0 in IMFA2
∑ DMAC activated by IMIA2 interrupt
[Setting conditions]
∑ 16TCNT2 = GRA2 when GRA2 functions as an output
compare register
∑ 16TCNT2 value is transferred to GRA2 by an input capture
signal when GRA2 functions as an input capture register
Input capture/compare match interrupt enable A0
0
1
IMIA0 interrupt requested by IMFA0 flag is disabled (Initial value)
IMIA0 interrupt requested by IMFA0 flag is enabled
Input capture/compare match interrupt enable A1
0
1
IMIA1 interrupt requested by IMFA1 flag is disabled (Initial value)
IMIA1 interrupt requested by IMFA1 flag is enabled
Input capture/compare match interrupt enable A2
0
1
IMIA2 interrupt requested by IMFA2 flag is disabled (Initial value)
IMIA2 interrupt requested by IMFA2 flag is enabled
Note: * Only 0 can be written, to clear the flag.
685
TISRB--Timer Interrupt Status Register B
H'FFF65
16-Bit Timer (Common)
7
1
6
IMIEB2
0
R/W
5
IMIEB1
0
R/W
4
IMIEB0
0
3
1
2
IMFB2
0
R/(W)*
1
IMFB1
0
R/(W)*
0
IMFB0
0
R/(W)*
Bit
Initial value
Read/Write
R/W
Input capture/compare match flag B0
0
1
[Clearing condition] (Initial value)
Read IMFB0 when IMFB0 =1, then write 0 in IMFB0
[Setting conditions]
∑ 16TCNT0 = GRB0 when GRB0 functions as an
output compare register.
∑ 16TCNT0 value is transferred to GRB0 by an input
capture signal when GRB0 functions as an input
capture register.
Input capture/compare match flag B1
0
1
[Clearing condition] (Initial value)
Read IMFB1 when IMFB1 =1, then write 0 in IMFB1
[Setting conditions]
∑ 16TCNT1 = GRB1 when GRB1 functions as an output
compare register
∑ 16TCNT1 value is transferred to GRB1 by an input capture
signal when GRB1 functions as an input capture register
Input capture/compare match flag B2
0
1
[Clearing condition] (Initial value)
Read IMFB2 when IMFB2 =1, then write 0 in IMFB2
[Setting conditions]
∑ 16TCNT2 = GRB2 when GRB2 functions as an output
compare register
∑ 16TCNT2 value is transferred to GRB2 by an input capture
signal when GRB2 functions as an input capture register
Input capture/compare match interrupt enable B0
0
1
IMIB0 interrupt requested by IMFB0 flag is disabled (Initial value)
IMIB0 interrupt requested by IMFB0 flag is enabled
Input capture/compare match interrupt enable B1
0
1
IMIB1 interrupt requested by IMFB1 flag is disabled (Initial value)
IMIB1 interrupt requested by IMFB1 flag is enabled
Input capture/compare match interrupt enable B2
0
1
IMIB2 interrupt requested by IMFB2 flag is disabled (Initial value)
IMIB2 interrupt requested by IMFB2 flag is enabled
Note: * Only 0 can be written, to clear the flag.
686
TISRC--Timer Interrupt Status Register C
H'FFF66
16-Bit Timer (Common)
7
1
6
OVIE2
0
R/W
5
OVIE1
0
R/W
4
OVIE0
0
3
1
2
OVF2
0
R/(W)*
1
OVF1
0
R/(W)*
0
OVF0
0
R/(W)*
Bit
Initial value
Read/Write
R/W
0
Overflow flag 0
[Clearing condition] (Initial value)
Read OVF0 when OVF0 =1, then write 0 in OVF0
1
[Setting condition]
16TCNT0 overflowed from H'FFFF to H'0000
0
Overflow flag 1
[Clearing condition] (Initial value)
Read OVF1 when OVF1 =1, then write 0 in OVF1
1
[Setting condition]
16TCNT1 overflowed from H'FFFF to H'0000
0
Overflow flag 2
[Clearing condition] (Initial value)
Read OVF2 when OVF2 =1, then write 0 in OVF2
1
[Setting condition]
16TCNT2 overflowed from H'FFFF to H'0000 or
underflowed from H'0000 to H'FFFF
0
Overflow interrupt enable 0
OVI0 interrupt requested by OVF0 flag is disabled (Initial value)
1
OVI0 interrupt requested by OVF0 flag is enabled
0
Overflow interrupt enable 1
OVI1 interrupt requested by OVF1 flag is disabled (Initial value)
1
OVI1 interrupt requested by OVF1 flag is enabled
0
Overflow interrupt enable 2
OVI2 interrupt requested by OVF2 flag is disabled (Initial value)
1
OVI2 interrupt requested by OVF2 flag is enabled
Note: * Only 0 can be written, to clear the flag.

687
16TCR0--Timer Control Register 0
H'FFF68
16-Bit Timer Channel 0
7
1
6
CCLR1
0
R/W
5
CCLR0
0
R/W
4
CKEG1
0
3
CKEG0
0
R/W
2
TPSC2
0
R/W
1
TPSC1
0
R/W
0
TPSC0
0
R/W
Bit
Initial value
Read/Write
R/W
Timer prescaler 2 to 0
Bit 2
TPSC2
Description
Bit 1
TPSC1
Internal clock: Counts on
(Initial value)
Internal clock: Counts on
/2
Internal clock: Counts on
/4
Internal clock: Counts on
/8
External clock A: Counts on TCLKA pin input
External clock B: Counts on TCLKB pin input
External clock C: Counts on TCLKC pin input
External clock D: Counts on TCLKD pin input
Bit 0
TPSC0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Clock edge 1 and 0
Bit 4
CKEG1
Description
Bit 3
CKEG0
Counts on rising edge (Initial value)
Counts on falling edge
Counts on both rising and falling edges
0
1
0
0
1
Counter clear 1 and 0
Bit 6
CCLR1
Description
Bit 5
CCLR0
16TCNT clearing disabled (Initial value)
16TCNT cleared by GRA compare match/input capture
16TCNT cleared by GRB compare match/input capture
Synchronous clear. 16TCNT cleared in synchronization with counter
clearing of other timers operating synchronously.
0
1
0
1
0
1

688
TIOR0--Timer I/O Control Register 0
H'FFF69
16-Bit Timer Channel 0
7
1
6
IOB2
0
R/W
5
IOB1
0
R/W
4
IOB0
0
3
1
2
IOA2
0
R/W
1
IOA1
0
R/W
0
IOA0
0
R/W
Bit
Initial value
Read/Write
R/W
I/O control A2 to A0
Bit 2
IOA2
Description
Bit 1
IOA1
GRA is output
compare register
Pin output at compare match disabled (Initial value)
0 output at GRA compare match
1 output at GRA compare match
Toggle output at GRA compare match
(1 output on channel 2 only)
Bit 0
IOA0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
I/O control B2 to B0
Bit 6
IOB2
Description
Bit 5
IOB1
GRB is output
compare register
Pin output at compare match disabled (Initial value)
0 output at GRB compare match
1 output at GRB compare match
Toggle output at GRB compare match
(1 output on channel 2 only)
Bit 4
IOB0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
GRA is input
capture register
Input capture in GRA at rising edge
Input capture in GRA at falling edge
Input capture at both rising and falling edges
GRB is input
capture register
Input capture in GRB at rising edge
Input capture in GRB at falling edge
Input capture at both rising and falling edges
689
16TCNT0H/L--Timer Counter 0H/L
H'FFF6A
H'FFF6B
16-Bit Timer Channel 0
Bit
Initial value
Read/Write
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Up-counter
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
GRA0H/L--General Register A0 H/L
H'FFF6C
H'FFF6D
16-Bit Timer Channel 0
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Output compare/input capture dual-function register
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
GRB0H/L--General Register B0 H/L
H'FFF6E
H'FFF6F
16-Bit Timer Channel 0
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Output compare/input capture dual-function register
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
690
16TCR1--Timer Control Register 1
H'FFF70
16-Bit Timer Channel 1
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
CCLR1
0
R/W
5
CCLR0
0
R/W
4
CKEG1
3
CKEG0
2
TPSC2
1
TPSC1
1
0
R/W
0
R/W
0
R/W
0
TPSC0
* Bit functions are the same as for 16-bit timer channel 0.
TIOR1--Timer I/O Control Register 1
H'FFF71
16-Bit Timer Channel 1
Bit
Initial value
Read/Write
1
7
0
R/W
6
IOB2
0
R/W
5
IOB1
0
R/W
4
IOB0
3
2
IOA2
1
IOA1
1
0
R/W
0
R/W
0
R/W
0
IOA0
* Bit functions are the same as for 16-bit timer channel 0.
16TCNT1H/L--Timer Counter 1H/L
H'FFF72
H'FFF73
16-Bit Timer Channel 1
Bit
Initial value
Read/Write
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
* Bit functions are the same as for 16-bit timer channel 0.
691
GRA1H/L--General Register A1 H/L
H'FFF74
H'FFF75
16-Bit Timer Channel 1
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
* Bit functions are the same as for 16-bit timer channel 0.
GRB1H/L--General Register B1 H/L
H'FFF76
H'FFF77
16-Bit Timer Channel 1
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
* Bit functions are the same as for 16-bit timer channel 0.
16TCR2--Timer Control Register 2
H'FFF78
16-Bit Timer Channel 2
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
CCLR1
0
R/W
5
CCLR0
0
R/W
4
CKEG1
3
CKEG0
2
TPSC2
1
TPSC1
1
0
R/W
0
R/W
0
R/W
0
TPSC0
* Bit functions are the same as for 16-bit timer channel 0.
Note: The settings of bits CKEG1 and CKEG0 and bits TPSC2 to TPSC0 in 16TCR2 are invalid when phase
counting mode is selected for channel 2.
692
TIOR2--Timer I/O Control Register 2
H'FFF79
16-Bit Timer Channel 2
Bit
Initial value
Read/Write
1
7
0
R/W
6
IOB2
0
R/W
5
IOB1
0
R/W
4
IOB0
3
2
IOA2
1
IOA1
1
0
R/W
0
R/W
0
R/W
0
IOA0
* Bit functions are the same as for 16-bit timer channel 0.
16TCNT2H/L--Timer Counter 2H/L
H'FFF7A
H'FFF7B
16-Bit Timer Channel 2
Bit
Initial value
Read/Write
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Phase counting mode: Up/down-counter
Other modes: Up-counter
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
GRA2H/L--General Register A2 H/L
H'FFF7C
H'FFF7D
16-Bit Timer Channel 2
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
* Bit functions are the same as for 16-bit timer channel 0.
693
GRB2H/L--General Register B2 H/L
H'FFF7E
H'FFF7F
16-Bit Timer Channel 2
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
* Bit functions are the same as for 16-bit timer channel 0.

694
8TCR0--Timer Control Register 0
8TCR1--Timer Control Register 1
H'FFF80
H'FFF81
8-bit timer channel 0
8-bit timer channel 1
Bit
Initial value
Read/Write
0
R/W
7
CMIEB
0
R/W
6
CMIEA
0
R/W
5
OVIE
0
R/W
4
CCLR1
0
R/W
3
CCLR0
0
R/W
2
CKS2
0
R/W
1
CKS1
0
R/W
0
CKS0
Clock select 2 to 0
0
0
0
1
0
1
0
0
1
1
0
1
1
Clock input is disabled
Internal clock, counted on rising
edge of
/8
Internal clock, counted on rising
edge of
/64
Internal clock, counted on rising
edge of
/8192
External clock, counted on falling edge
External clock, counted on rising edge
External clock, counted on both
rising and falling edges
Counter clear 1 and 0
0
0
1
0
1
Clearing is disabled
Cleared by compare match A
Cleared by compare match B/input capture B
Cleared by input capture B
1
Timer overflow interrupt enable
0
1
OVI interrupt requested by OVF is disabled
OVI interrupt requested by OVF is enabled
Compare match interrupt enable A
0
1
CMIA interrupt requested by CMFA is disabled
CMIA interrupt requested by CMFA is enabled
Compare match interrupt enable B
0
1
CMIB interrupt requested by CMFB is disabled
CMIB interrupt requested by CMFB is enabled
1
Channel 0:
Count on 8TCNT1 overflow signal*
Channel 1:
Count on 8TCNT0 compare match
A*
Note: * If the clock input of channel 0 is the 8TCNT1
overflow signal and that of channel 1 is the
8TCNT0 compare match signal, no
incrementing clock is generated. Do not use
695
8TCSR0--Timer Control/Status Register 0
H'FFF82
8-bit timer channel 0
Output select A1 and A0
0
Description
Description
Description
Bit 1
OS1
Bit 0
OS0
ICE in
8TCSR1
Bit 3
OIS3
Bit 4
ADTE
TRGE
*
Bit 2
OIS2
1
0
1
No change at compare match A
0 output at compare match A
1 output at compare match A
Output toggles at compare
match A
Output/input capture edge select B3 and B2
0
0
1
0
1
0
1
0
1
0
1
0
1
No change at compare match B
0 output at compare match B
1 output at compare match B
Output toggles at compare match
B
TCORB input capture on rising
edge
TCORB input capture on falling
edge
TCORB input capture on both
rising and falling edges
1
A/D trigger enable
0
0
1
0
1
A/D converter start requests by compare match
A or an external trigger are disabled
A/D converter start requests by compare match
A or an external trigger are enabled
A/D converter start requests by an external trigger are enabled, and
A/D converter start requests by compare match A are disabled
A/D converter start requests by compare match A are enabled, and
A/D converter start requests by an external trigger are disabled
Timer overflow flag
0
[Clearing condition]
Read OVF when OVF = 1, then write 0 in OVF.
Bit
Initial value
Read/Write
0
R/(W)*
7
CMFB
0
R/(W)*
6
CMFA
0
R/(W)*
5
OVF
0
R/W
4
ADTE
0
R/W
3
OIS3
0
R/W
2
OIS2
0
R/W
1
OS1
0
R/W
0
OS0
0
1
1
[Setting condition]
8TCNT overflows from H'FF to H'00.
Compare match flag A
0
[Clearing condition]
Read CMFA when CMFA = 1, then write 0 in CMFA.
1
[Setting condition]
8TCNT = TCORA
Compare match/input capture flag B
0
[Clearing condition]
Read CMFB when CMFB = 1, then write 0 in CMFB.
1
[Setting conditions]
∑ 8TCNT = TCORB
∑ The 8TCNT value is transferred to TCORB by an input capture signal when
TCORB functions as an input capture register.
Note: * Only 0 can be written to bits 7 to 5, to clear these flags.
Note: * TRGE is bit 7 of the A/D control register (ADCR).
1
696
8TCSR1--Timer Control/Status Register 1
H'FFF83
8-bit timer channel 1
Output select A1 and A0
0
Description
Description
Bit 1
OS1
Bit 0
OS0
ICE in
8TCSR1
Bit 3
OIS3
Bit 2
OIS2
1
0
1
No change at compare match A
0 output at compare match A
1 output at compare match A
Output toggles at compare
match A
Output/input capture edge select B3 and B2
0
0
1
0
1
0
1
0
1
0
1
0
1
No change at compare match B
0 output at compare match B
1 output at compare match B
Output toggles at compare match
B
TCORB input capture on rising
edge
TCORB input capture on falling
edge
TCORB input capture on both
rising and falling edges
1
Timer overflow flag
0
[Clearing condition]
Read OVF when OVF = 1, then write 0 in OVF.
0
1
1
[Setting condition]
8TCNT overflows from H'FF to H'00.
Compare match flag A
0
[Clearing condition]
Read CMFA when CMFA = 1, then write 0 in CMFA.
1
[Setting condition]
8TCNT = TCORA
Compare match/input capture flag B
0
[Clearing condition]
Read CMFB when CMFB = 1, then write 0 in CMFB.
1
[Setting conditions]
∑ 8TCNT = TCORB
∑ The 8TCNT value is transferred to TCORB by an input capture signal when
TCORB functions as an input capture register.
Note: * Only 0 can be written to bits 7 to 5, to clear these flags.
Bit
Initial value
Read/Write
0
R/(W)*
7
CMFB
0
R/(W)*
6
CMFA
0
R/(W)*
5
OVF
0
R/W
4
ICE
0
R/W
3
OIS3
0
R/W
2
OIS2
0
R/W
1
OS1
0
R/W
0
OS0
Input capture enable
0
1
TCORB is a compare match register
TCORB is an input capture register

697
TCORA0--Timer Constant Register A0
TCORA1--Timer Constant Register A1
H'FFF84
H'FFF85
8-bit timer channel 0
8-bit timer channel 1
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
TCORA0
TCORA1
TCORB0--Timer Constant Register B0
TCORB1--Timer Constant Register B1
H'FFF86
H'FFF87
8-bit timer channel 0
8-bit timer channel 1
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
TCORB0
TCORB1
8TCNT0--Timer Counter 0
8TCNT1--Timer Counter 1
H'FFF88
H'FFF89
8-bit timer channel 0
8-bit timer channel 1
Bit
Initial value
Read/Write
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
8TCNT0
8TCNT1

698
TCSR--Timer Control/Status Register
H'FFF8C
WDT
Bit
Initial value
Read/Write
0
R/(W)*
7
OVF
0
R/W
6
WT/
IT
0
R/W
5
TME
4
1
1
3
0
R/W
2
CKS2
0
R/W
1
CKS1
Clock select 2 to 0
0
0
/2
/32
/64
/128
/256
/512
/2048
/4096
1
0
CKS0
0
R/W
0
1
0
1
0
1
0
1
1
0
1
Timer enable
0
Timer disabled
∑ TCNT is initialized to H'00 and
halted
1
Timer enabled
∑ TCNT is counting
Timer mode select
0
Interval timer:
requests interval timer interrupts
1
Watchdog timer:
generates a reset signal
Overflow flag
0
[Clearing condition]
Read OVF when OVF = 1, then write 0 in OVF
1
[Setting condition]
TCNT changes from H'FF to H'00
Note: * Only 0 can be written, to clear the flag.
CKS2 CKS1 CKS0
Description

699
TCNT--Timer Counter
H'FFF8D (read), H'FFF8C (write)
WDT
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
2
0
R/W
1
0
R/W
0
Count value
RSTCSR--Reset Control/Status Register
H'FFF8F (read), H'FFF8E (write)
WDT
Bit
Initial value
Read/Write
0
R/(W)*
7
WRST
0
R/W
6
RSTOE
1
5
1
4
1
3
1
2
1
1
1
0
Reset output enable
0
External output of reset signal is disabled
External output of reset signal is enabled
1
Watchdog timer reset
0
[Clearing conditions]
∑ Reset signal at
RES
pin
∑ Read WRST when WRST = 1, then write 0 in WRST
1
[Setting condition]
TCNT overflow generates a reset signal
Note: * Only 0 can be written in bit 7, to clear the flag.
700
8TCR2--Timer Control Register 2
8TCR3--Timer Control Register 3
H'FFF90
H'FFF91
8-bit timer channel 2
8-bit timer channel 3
Bit
Initial value
Read/Write
0
R/W
7
CMIEB
0
R/W
6
CMIEA
0
R/W
5
OVIE
0
R/W
4
CCLR1
0
R/W
3
CCLR0
0
R/W
2
CKS2
0
R/W
1
CKS1
0
R/W
0
CKS0
Clock select 2 to 0
0
0
0
1
0
1
0
0
1
1
0
1
1
Clock input is disabled
Internal clock, counted on rising edge
of
/8
Internal clock, counted on rising edge
of
/64
Internal clock, counted on rising edge
of
/8192
External clock, counted on falling edge
External clock, counted on rising edge
External clock, counted on both
rising and falling edges
Counter clear 1 and 0
0
0
1
0
1
Clearing is disabled
Cleared by compare match A
Cleared by compare match B/input capture B
Cleared by input capture B
1
Timer overflow interrupt enable
0
1
OVI interrupt requested by OVF is disabled
OVI interrupt requested by OVF is enabled
Compare match interrupt enable A
0
1
CMIA interrupt requested by CMFA is disabled
CMIA interrupt requested by CMFA is enabled
Compare match interrupt enable B
0
1
CMIB interrupt requested by CMFB is disabled
CMIB interrupt requested by CMFB is enabled
1
CKS2 CKS1 CKS0
Description
Channel 2:
Count on 8TCNT3 overflow signal*
Channel 3:
Count on 8TCNT2 compare match A*
Note: * If the clock input of channel 2 is the 8TCNT3 overflow
signal and that of channel 3 is the 8TCNT2 compare
match signal, no incrementing clock is generated. Do
not use this setting.
701
8TCSR2--Timer Control/Status Register 2
8TCSR3--Timer Control/Status Register 3
H'FFF92
H'FFF93
8-bit timer channel 2
8-bit timer channel 3
Bit
Initial value
Read/Write
0
R/(W)*
7
CMFB
0
R/(W)*
6
CMFA
0
R/(W)*
5
OVF
0
R/W
4
ICE
0
R/W
3
OIS3
0
R/W
2
OIS2
0
R/W
1
OS1
0
R/W
0
OS0
Timer overflow flag
0
[Clearing condition]
Read OVF when OVF = 1, then write 0 in OVF.
Bit
Initial value
Read/Write
0
R/(W)*
7
CMFB
0
R/(W)*
6
CMFA
0
R/(W)*
5
OVF
1
--
4
0
R/W
3
OIS3
0
R/W
2
OIS2
0
R/W
1
OS1
0
R/W
0
OS0
8TCSR3
8TCSR2
1
[Setting condition]
8TCNT overflows from H'FF to H'00.
Compare match/input capture flag A
0
[Clearing condition]
Read CMFA when CMFA = 1, then write 0 in CMFA.
1
[Setting condition]
8TCNT = TCORA
Compare match/input capture flag B
0
[Clearing condition]
Read CMFB when CMFB = 1, then write 0 in CMFB.
1
[Setting conditions]
∑ 8TCNT = TCORB
∑ The 8TCNT value is transferred to TCORB by an input capture signal when
TCORB functions as an input capture register.
Note: * Only 0 can be written to bits 7 to 5, to clear these flags.
Output select A1 and A0
0
Description
Bit 1
OS1
Bit 0
OS0
1
0
1
No change at compare match A
0 output at compare match A
1 output at compare match A
Output toggles at compare
match A
0
1
Description
ICE in
8TCSR3
Bit 3
OIS3
Bit 2
OIS2
Output/input capture edge select B3 and B2
0
0
1
0
1
0
1
0
1
0
1
0
1
No change at compare match B
0 output at compare match B
1 output at compare match B
Output toggles at compare match
B
TCORB input capture on rising
edge
TCORB input capture on falling
edge
TCORB input capture on both
rising and falling edges
1
Input capture enable
0
1
TCORB is a compare match register
TCORB is an input capture register

702
TCORA2--Timer Constant Register A2
TCORA3--Timer Constant Register A3
H'FFF94
H'FFF95
8-bit timer channel 2
8-bit timer channel 3
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
TCORA2
TCORA3
TCORB2--Timer Constant Register B2
TCORB3--Timer Constant Register B3
H'FFF96
H'FFF97
8-bit timer channel 2
8-bit timer channel 3
Bit
Initial value
Read/Write
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
1
R/W
TCORB2
TCORB3
8TCNT2--Timer Counter 2
8TCNT3--Timer Counter 3
H'FFF98
H'FFF99
8-bit timer channel 2
8-bit timer channel 3
Bit
Initial value
Read/Write
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
0
R/W
8TCNT2
8TCNT3
703
DADR0--D/A Data Register 0
H'FFF9C
D/A
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
2
0
R/W
1
0
R/W
0
D/A conversion data
DADR1--D/A Data Register 1
H'FFF9D
D/A
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
0
R/W
5
0
R/W
4
0
R/W
3
0
R/W
2
0
R/W
1
0
R/W
0
D/A conversion data
704
DACR--D/A Control Register
H'FFF9E
D/A
Bit
Initial value
Read/Write
0
R/W
7
DAOE1
0
R/W
6
DAOE0
0
R/W
5
DAE
1
4
1
3
1
2
1
1
1
0
D/A enable
Bit 7
DAOE1
D/A conversion is disabled
in channels 0 and 1
D/A conversion is enabled
in channel 0
D/A conversion is disabled
in channel 1
D/A conversion is disabled
in channel 0
D/A conversion is enabled
in channel 1
Description
D/A conversion is enabled
in channels 0 and 1
D/A conversion is enabled
in channels 0 and 1
D/A conversion is enabled
in channels 0 and 1
Bit 6
Bit 5
DAOE0
DAE
0
0
0
1
1
1
0
1
1
0
0
1
0
1
0
1
D/A output enable 0
0
DA
0
analog output is disabled
1
Channel-0 D/A conversion and DA
0
analog output are enabled
D/A output enable 1
0
DA
1
analog output is disabled
1
Channel-1 D/A conversion and DA
1
analog output are enabled
705
TPMR--TPC Output Mode Register
H'FFFA0
TPC
Bit
Initial value
Read/Write
1
7
1
6
1
5
1
4
0
R/W
3
G3NOV
0
R/W
2
G2NOV
0
R/W
1
G1NOV
0
R/W
0
G0NOV
Group 0 non-overlap
0
Normal TPC output in group 0. Output values
change at compare match A in the selected
16-bit timer channel
1
Non-overlapping TPC output in group 0,
controlled by compare match A and B in the
selected 16-bit timer channel
Group 1 non-overlap
0
Normal TPC output in group 1. Output values change
at compare match A in the selected 16-bit timer channel
1
Non-overlapping TPC output in group 1, controlled by
compare match A and B in the selected 16-bit timer channel
Group 2 non-overlap
0
Normal TPC output in group 2. Output values change at
compare match A in the selected 16-bit timer channel
1
Non-overlapping TPC output in group 2, controlled by
compare match A and B in the selected 16-bit timer channel
Group 3 non-overlap
0
Normal TPC output in group 3. Output values change at
compare match A in the selected 16-bit timer channel
1
Non-overlapping TPC output in group 3, controlled by
compare match A and B in the selected 16-bit timer channel
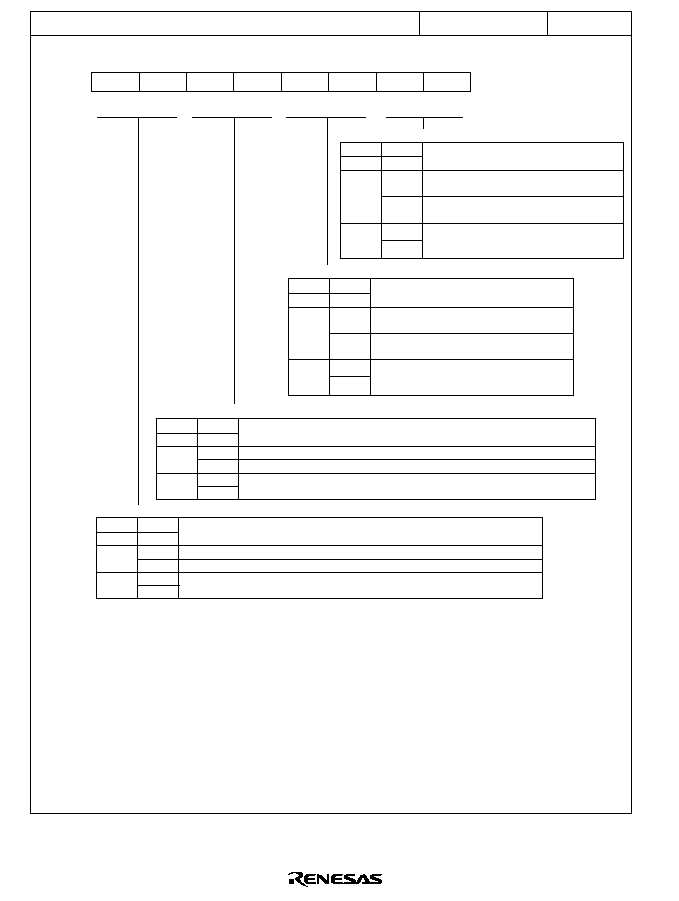
706
TPCR--TPC Output Control Register
H'FFFA1
TPC
Group 0 compare match select 1 and 0
Bit 1
G0CMS1
16-Bit Timer Channel Selected as Output Trigger
Bit 0
G0CMS0
TPC output group 0 (TP
3
to TP
0
) is triggered by
compare match in 16-bit timer channel 0
TPC output group 0 (TP
3
to TP
0
) is triggered by
compare match in 16-bit timer channel 1
TPC output group 0 (TP
3
to TP
0
) is triggered by
compare match in 16-bit timer channel 2
0
1
0
1
0
1
Group 1 compare match select 1 and 0
Bit 3
G1CMS1
16-Bit Timer Channel Selected as Output Trigger
Bit 2
G1CMS0
TPC output group 1 (TP
7
to TP
4
) is triggered by
compare match in 16-bit timer channel 0
TPC output group 1 (TP
7
to TP
4
) is triggered by
compare match in 16-bit timer channel 1
TPC output group 1 (TP
7
to TP
4
) is triggered by
compare match in 16-bit timer channel 2
0
1
0
1
0
1
Group 2 compare match select 1 and 0
Bit 5
G2CMS1
16-Bit Timer Channel Selected as Output Trigger
Bit 4
G2CMS0
TPC output group 2 (TP
11
to TP
8
) is triggered by compare match in 16-bit timer channel 0
TPC output group 2 (TP
11
to TP
8
) is triggered by compare match in 16-bit timer channel 1
TPC output group 2 (TP
11
to TP
8
) is triggered by compare match in 16-bit timer channel 2
0
1
0
1
0
1
Group 3 compare match select 1 and 0
Bit 7
G3CMS1
16-Bit Timer Channel Selected as Output Trigger
Bit 6
G3CMS0
TPC output group 3 (TP
15
to TP
12
) is triggered by compare match in 16-bit timer channel 0
TPC output group 3 (TP
15
to TP
12
) is triggered by compare match in 16-bit timer channel 1
TPC output group 3 (TP
15
to TP
12
) is triggered by compare match in 16-bit timer channel 2
0
1
0
1
0
1
Bit
Initial value
Read/Write
7
G3CMS1
6
G3CMS0
5
G2CMS1
4
G2CMS0
1
R/W
3
G1CMS1
1
R/W
2
G1CMS0
1
R/W
1
G0CMS1
1
R/W
0
G0CMS0
1
R/W
1
R/W
1
R/W
1
R/W
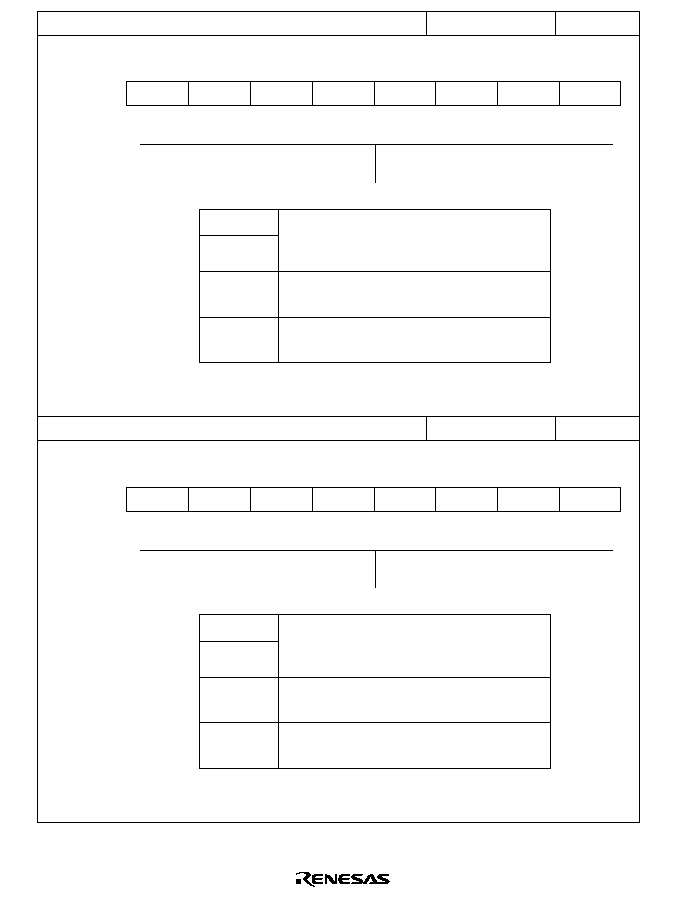
707
NDERB--Next Data Enable Register B
H'FFFA2
TPC
Bit
Initial value
Read/Write
0
R/W
7
NDER15
0
R/W
6
NDER14
0
R/W
5
NDER13
0
R/W
4
NDER12
0
R/W
3
NDER11
0
R/W
2
NDER10
0
R/W
1
NDER9
0
R/W
0
NDER8
Next data enable 15 to 8
Bits 7 to 0
NDER15
to NDER8
Description
TPC outputs TP
15
to TP
8
are disabled
(NDR15 to NDR8 are not transferred to PB
7
to PB
0
)
TPC outputs TP
15
to TP
8
are enabled
(NDR15 to NDR8 are transferred to PB
7
to PB
0
)
0
1
NDERA--Next Data Enable Register A
H'FFFA3
TPC
Bit
Initial value
Read/Write
0
R/W
7
NDER7
0
R/W
6
NDER6
0
R/W
5
NDER5
0
R/W
4
NDER4
0
R/W
3
NDER3
0
R/W
2
NDER2
0
R/W
1
NDER1
0
R/W
0
NDER0
Next data enable 7 to 0
Bits 7 to 0
NDER7
to NDER0
Description
TPC outputs TP
7
to TP
0
are disabled
(NDR7 to NDR0 are not transferred to PA
7
to PA
0
)
TPC outputs TP
7
to TP
0
are enabled
(NDR7 to NDR0 are transferred to PA
7
to PA
0
)
0
1

708
NDRB--Next Data Register B
H'FFFA4/H'FFFA6
TPC
∑
Same trigger for TPC output groups 2 and 3
Address H'FFFA4
Bit
Initial value
Read/Write
0
R/W
7
NDR15
0
R/W
6
NDR14
0
R/W
5
NDR13
0
R/W
4
NDR12
0
R/W
3
NDR11
0
R/W
2
NDR10
0
R/W
1
NDR9
0
R/W
0
NDR8
Store the next output data for TPC output group 3
Store the next output data for TPC output group 2
Address H'FFFA6
1
7
1
6
1
5
1
4
1
3
1
2
1
1
1
0
Bit
Initial value
Read/Write
∑
Different triggers for TPC output groups 2 and 3
Address H'FFFA4
Bit
Initial value
Read/Write
0
R/W
7
NDR15
0
R/W
6
NDR14
0
R/W
5
NDR13
0
R/W
4
NDR12
1
3
1
2
1
1
1
0
Store the next output data for TPC output group 3
Address H'FFFA6
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
0
R/W
5
0
R/W
4
3
NDR11
2
NDR10
1
NDR9
1
1
1
1
0
NDR8
Store the next output data for TPC output group 2
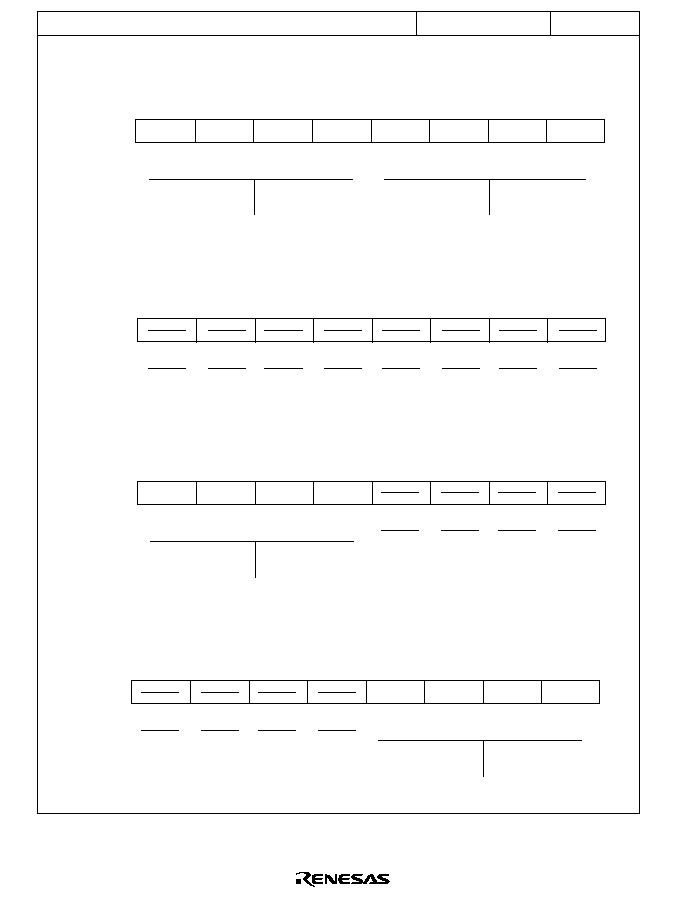
709
NDRA--Next Data Register A
H'FFFA5/H'FFFA7
TPC
∑
Same trigger for TPC output groups 0 and 1
Address H'FFFA5
Bit
Initial value
Read/Write
0
R/W
7
NDR7
0
R/W
6
NDR6
0
R/W
5
NDR5
0
R/W
4
NDR4
0
R/W
3
NDR3
0
R/W
2
NDR2
0
R/W
1
NDR1
0
R/W
0
NDR0
Store the next output data for TPC output group 1
Store the next output data for TPC output group 0
Address H'FFFA7
1
7
1
6
1
5
1
4
1
3
1
2
1
1
1
0
Bit
Initial value
Read/Write
∑
Different triggers for TPC output groups 0 and 1
Address H'FFFA5
Bit
Initial value
Read/Write
0
R/W
7
NDR7
0
R/W
6
NDR6
0
R/W
5
NDR5
0
R/W
4
NDR4
1
3
1
2
1
1
1
0
Store the next output data for TPC output group 1
Address H'FFFA7
Bit
Initial value
Read/Write
0
R/W
7
0
R/W
6
0
R/W
5
0
R/W
4
3
NDR3
2
NDR2
1
NDR1
1
1
1
1
0
NDR0
Store the next output data for TPC output group 0
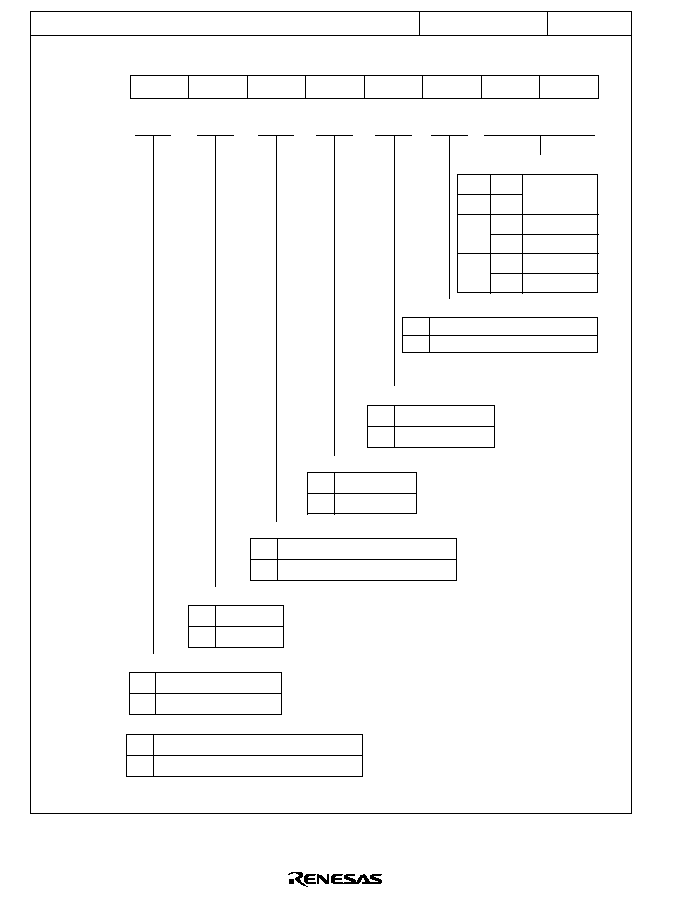
710
SMR--Serial Mode Register
H'FFFB0
SCI0
Bit
Initial value
Read/Write
0
R/W
7
C/
A
0
R/W
6
CHR
0
R/W
5
PE
4
O/
E
0
R/W
0
R/W
3
STOP
0
R/W
2
MP
0
R/W
1
CKS1
Clock select 1 and 0
0
Bit 0
clock
/4 clock
/16 clock
/64 clock
1
0
CKS0
0
R/W
Multiprocessor mode
0
Multiprocessor function disabled
Multiprocessor function enabled
1
Bit 1
Clock Source
CKS0
CKS1
0
1
0
1
Stop bit length
0
One stop bit
Two stop bits
1
Parity mode
0
Even parity
Odd parity
1
Parity enable
0
Parity bit is not added or checked
Parity bit is added and checked
1
GSM mode (for smart card interface)
0
TEND flag is set 12.5 etu* after start bit
TEND flag is set 11.0 etu* after start bit
1
Character length
0
8-bit data
7-bit data
1
Communication mode (for serial communication interface)
0
Asynchronous mode
Synchronous mode
1
Note: * etu: Elementary time unit (time required to transmit one bit)
711
BRR--Bit Rate Register
H'FFFB1
SCI0
Bit
Initial value
Read/Write
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
Serial communication bit rate setting
712
SCR--Serial Control Register
H'FFFB2
SCI0
Bit
Initial value
Read/Write
0
R/W
7
TIE
0
R/W
6
RIE
0
R/W
5
TE
0
R/W
4
RE
0
R/W
3
MPIE
0
R/W
2
TEIE
0
R/W
1
CKE1
0
R/W
0
CKE0
Clock enable 1 and 0
(for serial communication interface)
Bit 1
CKE1
Bit 0
CKE0
Asynchronous mode
Synchronous mode
Asynchronous mode
Synchronous mode
Asynchronous mode
Synchronous mode
Asynchronous mode
Synchronous mode
0
1
0
1
0
1
Description
Transmit-end interrupt enable
0
1
Transmit-end interrupt requests (TEI) are disabled
Transmit-end interrupt requests (TEI) are enabled
Receive interrupt enable
0
1
Receive-data-full (RXI) and receive-error (ERI) interrupt requests are disabled
Receive-data-full (RXI) and receive-error (ERI) interrupt requests are enabled
Internal clock, SCK pin
available for generic I/O
Internal clock, SCK pin
used for serial clock output
Internal clock, SCK pin
used for clock output
Internal clock, SCK pin
used for serial clock output
External clock, SCK pin
used for clock input
External clock, SCK pin
used for serial clock input
External clock, SCK pin
used for clock input
External clock, SCK pin
used for serial clock input
Multiprocessor interrupt enable
0
1
Multiprocessor interrupts are disabled (normal receive operation)
Multiprocessor interrupts are enabled
Receive enable
0
1
Receiving is
disabled
Receiving is
enabled
Transmit enable
0
1
Transmitting is disabled
Transmitting is enabled
Transmit interrupt enable
0
1
Transmit-data-empty interrupt request (TXI) is disabled
Transmit-data-empty interrupt request (TXI) is enabled
Clock enable 1 and 0 (for smart card interface)
SMR
GM
Bit 1
CKE1
Bit 0
CKE0
0
0
1
0
1
0
1
0
1
0
1
Description
SCK pin available for generic I/O
SCK pin used for clock output
SCK pin output fixed low
SCK pin used for clock output
SCK pin output fixed high
SCK pin used for clock output
713
TDR--Transmit Data Register
H'FFFB3
SCI0
Bit
Initial value
Read/Write
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
Serial transmit data
714
SSR--Serial Status Register
H'FFFB4
SCI0
Bit
Initial value
Read/Write
1
R/(W)*
7
TDRE
0
R/(W)*
6
RDRF
0
R/(W)*
5
ORER
0
R/(W)*
4
FER/ERS
0
R/(W)*
3
PER
1
R
2
TEND
0
R
1
MPB
0
R/W
0
MPBT
Transmit end (for serial communication interface)
0
Multiprocessor bit transfer
0
1
Multiprocessor bit value in transmit data is 0
Multiprocessor bit value in transmit data is 1
Multiprocessor bit
0
1
Multiprocessor bit value in receive data is 0
Multiprocessor bit value in receive data is 1
[Clearing conditions]
∑ Read TDRE when TDRE = 1, then write 0 in TDRE.
∑ The DMAC writes data in TDR.
[Setting conditions]
∑ Reset or transition to standby mode
∑ TE is cleared to 0 in SCR.
∑ TDRE is 1 when last bit of 1-byte serial character is
transmitted.
Parity error
0
1
[Clearing conditions]
∑ Reset or transition to standby mode
∑ Read PER when PER = 1, then write 0 in PER.
[Setting condition]
Parity error (parity of receive data does not match parity
setting of O/
E
bit in SMR)
Framing error (for serial communication interface)
0
[Clearing conditions]
∑ Reset or transition to standby mode
∑ Read FER when FER = 1, then write 0 in FER.
[Setting condition]
Framing error (stop bit is 0)
Error signal status (for smart card interface)
0
[Clearing conditions]
∑ Reset or transition to standby mode
∑ Read ERS when ERS = 1, then write 0 in ERS.
[Setting condition]
A low error signal is received.
1
1
Overrun error
0
[Clearing conditions]
∑ Reset or transition to standby mode
∑ Read ORER when ORER = 1, then write 0 in ORER.
[Setting condition]
Overrun error (reception of the next serial data ends when RDRF = 1)
1
Receive data register full
0
[Clearing conditions]
∑ Reset or transition to standby mode
∑ Read RDRF when RDRF = 1, then write 0 in RDRF.
∑ The DMAC reads data from RDR.
[Setting condition]
Serial data is received normally and transferred from RSR to RDR.
1
Transmit data register empty
Note: * Only 0 can be written, to clear the flag.
0
[Clearing conditions] ∑ Read TDRE when TDRE = 1, then write 0 in TDRE.
∑ The DMAC writes data in TDR.
[Setting conditions]
∑ Reset or transition to standby mode
∑ TE is 0 in SCR.
∑ Data is transferred from TDR to TSR, enabling new data to be written in TDR
1
1
Transmit end (for smart card interface)
0
[Clearing conditions]
∑ Read TDRE when TDRE = 1, then write 0 in TDRE.
∑ The DMAC writes data in TDR.
[Setting conditions]
∑ Reset or transition to standby mode
∑ TE is cleared to 0 in SCR and FER/ERS is cleared to 0.
∑ TDRE is 1 and FER/ERS is 0 (normal transmission)
2.5 etu* (when GM = 0) or 1.0 etu (when GM = 1) after
1-byte serial character is transmitted.
1
Note: * etu: Elementary time unit (time required to transmit one bit)
715
RDR--Receive Data Register
H'FFFB5
SCI0
Bit
Initial value
Read/Write
0
R
7
0
R
6
0
R
5
0
R
4
0
R
3
0
R
2
0
R
1
0
R
0
Serial receive data
716
SCMR--Smart Card Mode Register
H'FFFB6
SCI0
1
7
1
6
1
5
1
4
0
R/W
3
SDIR
0
R/W
2
SINV
1
1
0
R/W
0
SMIF
Smart card interface mode select
0
1
Smart card interface function
is disabled (Initial value)
Smart card interface function
is enabled
Smart card data invert
0
1
Unmodified TDR contents are transmitted (Initial value)
Receive data is stored unmodified in RDR
Inverted TDR contents are transmitted
Received data are inverted before storage in RDR
Smart card data transfer direction
0
1
TDR contents are transmitted LSB-first (Initial value)
Receive data is stored LSB-first in RDR
TDR contents are transmitted MSB-first
Receive data is stored MSB-first in RDR
Bit
Initial value
Read/Write
717
SMR--Serial Mode Register
H'FFFB8
SCI1
0
R/W
7
C/
A
0
R/W
6
CHR
0
R/W
5
PE
0
R/W
4
O/
E
0
R/W
3
STOP
0
R/W
2
MP
0
R/W
1
CKS1
0
R/W
0
CKS0
Note: Bit functions are the same as for SCI0.
Bit
Initial value
Read/Write
BRR--Bit Rate Register
H'FFFB9
SCI1
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
Note: Bit functions are the same as for SCI0.
Bit
Initial value
Read/Write
SCR--Serial Control Register
H'FFFBA
SCI1
0
R/W
7
TIE
0
R/W
6
RIE
0
R/W
5
TE
0
R/W
4
RE
0
R/W
3
MPIE
0
R/W
2
TEIE
0
R/W
1
CKE1
0
R/W
0
CKE0
Note: Bit functions are the same as for SCI0.
Bit
Initial value
Read/Write
718
TDR--Transmit Data Register
H'FFFBB
SCI1
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
SSR--Serial Status Register
H'FFFBC
SCI1
0
R/(W)*
7
TDRE
0
R/(W)*
6
RDRF
0
R/(W)*
5
ORER
0
R/(W)*
4
FER/ERS
0
R/(W)*
3
PER
1
R
2
TEND
0
R
1
MPB
0
R/W
0
MPBT
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
* Only 0 can be written, to clear the flag.
RDR--Receive Data Register
H'FFFBD
SCI1
0
R
7
0
R
6
0
R
5
0
R
4
0
R
3
0
R
2
0
R
1
0
R
0
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
719
SCMR--Smart Card Mode Register
H'FFFBE
SCI1
0
R/W
7
0
R/W
6
1
5
0
R/W
4
3
SDIR
2
SINV
1
1
1
1
1
0
SMIF
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
720
SMR--Serial Mode Register
H'FFFC0
SCI2
0
R/W
7
C/
A
0
R/W
6
CHR
0
R/W
5
PE
0
R/W
4
O/
E
0
R/W
3
STOP
0
R/W
2
MP
0
R/W
1
CKS1
0
R/W
0
CKS0
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
BRR--Bit Rate Register
H'FFFC1
SCI2
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
SCR--Serial Control Register
H'FFFC2
SCI2
0
R/W
7
TIE
0
R/W
6
RIE
0
R/W
5
TE
0
R/W
4
RE
0
R/W
3
MPIE
0
R/W
2
TEIE
0
R/W
1
CKE1
0
R/W
0
CKE0
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
721
TDR--Transmit Data Register
H'FFFC3
SCI2
1
R/W
7
1
R/W
6
1
R/W
5
1
R/W
4
1
R/W
3
1
R/W
2
1
R/W
1
1
R/W
0
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
SSR--Serial Status Register
H'FFFC4
SCI2
1
R/(W)*
7
TDRE
0
R/(W)*
6
RDRF
0
R/(W)*
5
ORER
0
R/(W)*
4
FER/ERS
0
R/(W)*
3
PER
1
R
2
TEND
0
R
1
MPB
0
R/W
0
MPBT
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
* Only 0 can be written, to clear the flag.
RDR--Receive Data Register
H'FFFC5
SCI2
0
R
7
0
R
6
0
R
5
0
R
4
0
R
3
0
R
2
0
R
1
0
R
0
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.

722
SCMR--Smart Card Mode Register
H'FFFC6
SCI2
0
R/W
7
0
R/W
6
1
5
0
R/W
4
3
SDIR
2
SINV
1
1
1
1
1
0
SMIF
Bit
Initial value
Read/Write
Note: Bit functions are the same as for SCI0.
723
P4DR--Port 4 Data Register
H'FFFD3
Port 4
0
R/W
7
P4
7
0
R/W
6
P4
6
0
R/W
5
P4
5
0
R/W
4
P4
4
0
R/W
3
P4
3
0
R/W
2
P4
2
0
R/W
1
P4
1
0
R/W
0
P4
0
Data for port 4 pins
Bit
Initial value
Read/Write
P6DR--Port 6 Data Register
H'FFFD5
Port 6
*
R
7
P6
7
0
R/W
6
P6
6
0
R/W
5
P6
5
0
R/W
4
P6
4
0
R/W
3
P6
3
0
R/W
2
P6
2
0
R/W
1
P6
1
0
R/W
0
P6
0
Data for port 6 pins
Bit
Note:
*
Determined by pin P6
7
.
Initial value
Read/Write

724
P7DR--Port 7 Data Register
H'FFFD6
Port 7
R
7
P7
7
R
6
P7
6
R
5
P7
5
R
4
P7
4
R
3
P7
3
R
2
P7
2
R
1
P7
1
R
0
P7
0
Data for port 7 pins
*
*
*
*
*
*
*
*
Note: * Determined by pins P7
7
to P7
0
.
Bit
Initial value
Read/Write
P8DR--Port 8 Data Register
H'FFFD7
Port 8
1
7
1
6
1
5
0
R/W
4
P8
4
0
R/W
3
P8
3
0
R/W
2
P8
2
0
R/W
1
P8
1
0
R/W
0
P8
0
Data for port 8 pins
Bit
Initial value
Read/Write
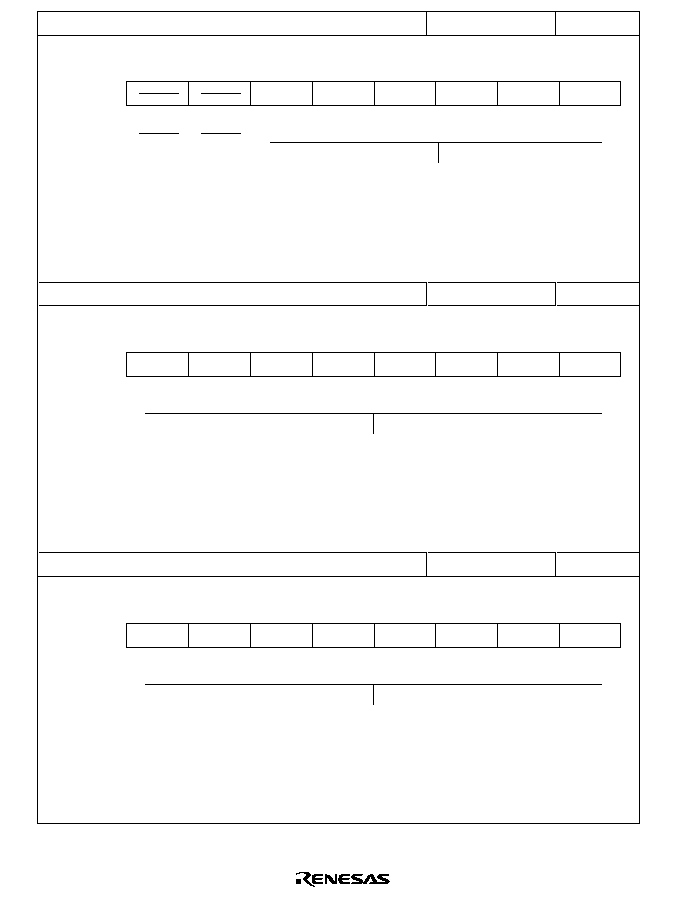
725
P9DR--Port 9 Data Register
H'FFFD8
Port 9
1
7
1
6
0
R/W
5
P9
5
0
R/W
4
P9
4
0
R/W
3
P9
3
0
R/W
2
P9
2
0
R/W
1
P9
1
0
R/W
0
P9
0
Data for port 9 pins
Bit
Initial value
Read/Write
PADR--Port A Data Register
H'FFFD9
Port A
0
R/W
7
PA
7
0
R/W
6
PA
6
0
R/W
5
PA
5
0
R/W
4
PA
4
0
R/W
3
PA
3
0
R/W
2
PA
2
0
R/W
1
PA
1
0
R/W
0
PA
0
Data for port A pins
Bit
Initial value
Read/Write
PBDR--Port B Data Register
H'FFFDA
Port B
0
R/W
7
PB
7
0
R/W
6
PB
6
0
R/W
5
PB
5
0
R/W
4
PB
4
0
R/W
3
PB
3
0
R/W
2
PB
2
0
R/W
1
PB
1
0
R/W
0
PB
0
Data for port B pins
Bit
Initial value
Read/Write
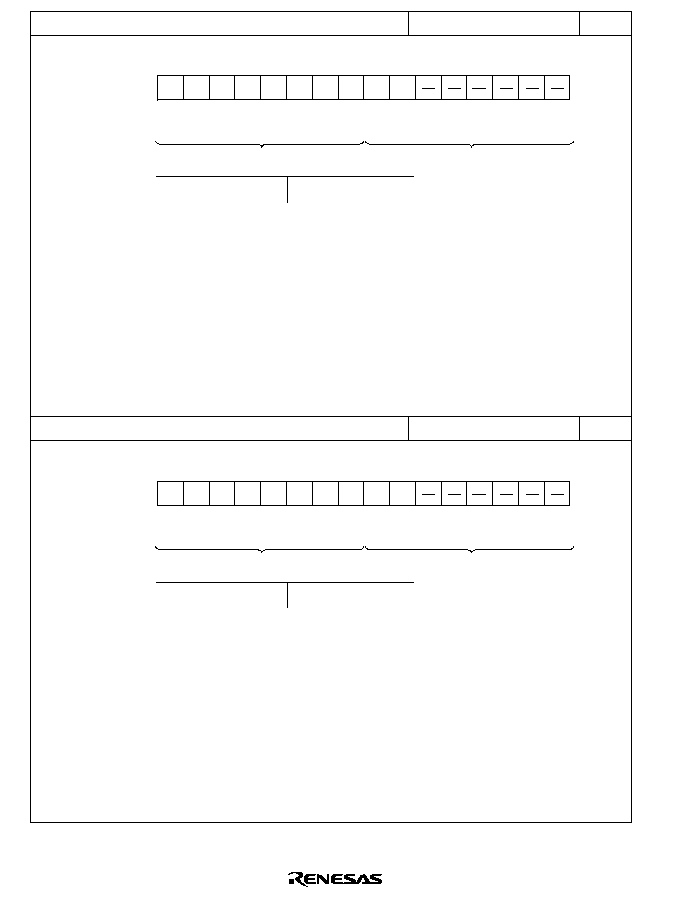
726
ADDRA H/L--A/D Data Register A H/L
H'FFFE0, H'FFFE1
A/D
0
R
15
AD9
A/D conversion data
10-bit data giving an A/D conversion result
0
R
14
AD8
0
R
13
AD7
0
R
12
AD6
0
R
11
AD5
0
R
10
AD4
0
R
9
AD3
0
R
8
AD2
0
R
7
AD1
0
R
6
AD0
0
R
5
0
R
4
0
R
3
0
R
2
0
R
1
0
R
0
ADDRAH
ADDRAL
Bit
Initial value
Read/Write
ADDRB H/L--A/D Data Register B H/L
H'FFFE2, H'FFFE3
A/D
0
R
15
AD9
0
R
14
AD8
0
R
13
AD7
0
R
12
AD6
0
R
11
AD5
0
R
10
AD4
0
R
9
AD3
0
R
8
AD2
0
R
7
AD1
0
R
6
AD0
0
R
5
0
R
4
0
R
3
0
R
2
0
R
1
0
R
0
ADDRBH
ADDRBL
A/D conversion data
10-bit data giving an A/D conversion result
Bit
Initial value
Read/Write
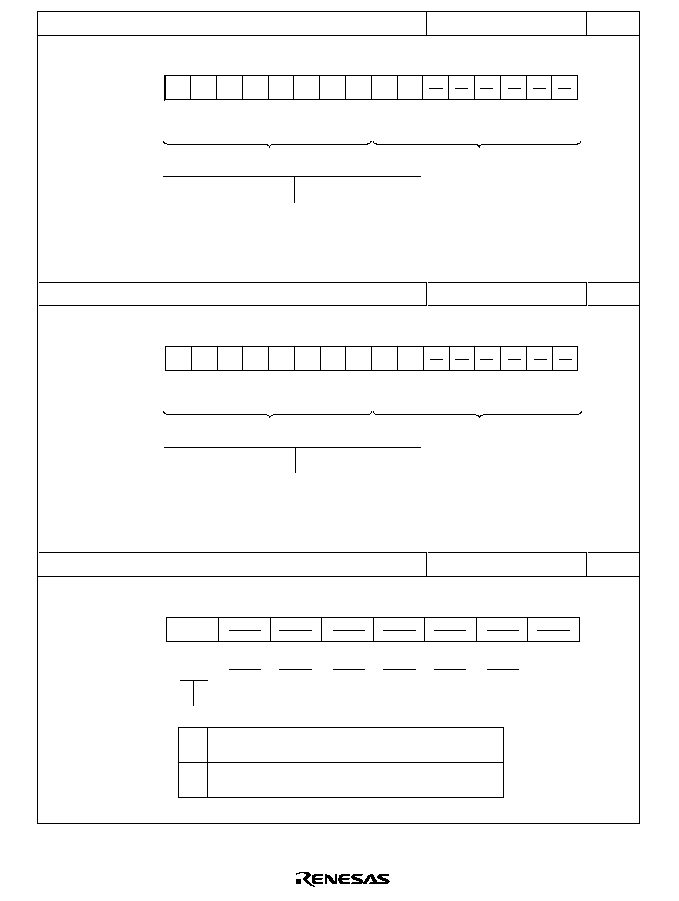
727
ADDRC H/L--A/D Data Register C H/L
H'FFFE4, H'FFFE5
A/D
0
R
15
AD9
0
R
14
AD8
0
R
13
AD7
0
R
12
AD6
0
R
11
AD5
0
R
10
AD4
0
R
9
AD3
0
R
8
AD2
0
R
7
AD1
0
R
6
AD0
0
R
5
0
R
4
0
R
3
0
R
2
0
R
1
0
R
0
ADDRCH
ADDRCL
A/D conversion data
10-bit data giving an A/D conversion result
Bit
Initial value
Read/Write
ADDRD H/L--A/D Data Register D H/L
H'FFFE6, H'FFFE7
A/D
0
R
15
AD9
0
R
14
AD8
0
R
13
AD7
0
R
12
AD6
0
R
11
AD5
0
R
10
AD4
0
R
9
AD3
0
R
8
AD2
0
R
7
AD1
0
R
6
AD0
0
R
5
0
R
4
0
R
3
0
R
2
0
R
1
0
R
0
ADDRDH
ADDRDL
A/D conversion data
10-bit data giving an A/D conversion result
Bit
Initial value
Read/Write
ADCR H/L--A/D Control Register
H'FFFE9
A/D
0
R/W
7
TRGE
1
6
1
5
1
4
1
3
1
2
1
1
0
R/W
0
Trigger Enable
0
1
A/D conversion start by external trigger or 8-bit timer
compare match is disabled
A/D conversion is started by falling edge of external
trigger signal (
ADTRG
) or 8-bit timer compare match
Bit
Initial value
Read/Write

728
ADCSR--A/D Control/Status Register
H'FFFE8
A/D
0
R/(W)*
7
ADF
0
R/W
6
ADIE
0
R/W
5
ADST
0
R/W
4
SCAN
0
R/W
3
CKS
0
R/W
2
CH2
0
R/W
1
CH1
0
R/W
0
CH0
Channel select
Group Selection
0
1
0
1
AN
0
AN
1
AN
2
AN
3
AN
4
AN
5
AN
6
AN
7
0
CH2
1
0
1
0
1
0
1
0
1
Description
Single Mode
Scan Mode
Clock select
0
1
Conversion time =
134 states (maximum)
Conversion time =
70 states (maximum)
Channel Selection
CH1 CH0
AN
0
AN
0,
AN
1
AN
0
to AN
2
AN
0
to AN
3
AN
4
AN
4,
AN
5
AN
4
to AN
6
AN
4
to AN
7
Scan mode
0
1
Single mode
Scan mode
A/D start
0
1
A/D conversion is stopped
1. Single mode: A/D conversion starts; ADST is automatically cleared to 0 when conversion ends
2. Scan mode: A/D conversion starts and continues, cycling among the selected channels ADST
is cleared to 0 by software, by a reset, or by a transition to standby mode
A/D interrupt enable
0
1
A/D end interrupt request is disabled
A/D end interrupt request is enabled
A/D end flag
0
[Clearing condition]
∑ Read ADF when ADF = 1, then write 0 in ADF
∑ The DMAC is activated by an ADI interrupt
[Setting conditions]
∑ Single mode: A/D conversion ends
∑ Scan mode: A/D conversion ends in all selected channels
1
Note: * Only 0 can be written, to clear the flag.
Bit
Initial value
Read/Write

729
Appendix C I/O Port Block Diagrams
C.1
Port 4 Block Diagram
P4
n
RP4P
RP4
WP4
WP4D
WP4P
Reset
Reset
Reset
Q
D
R
C
P4 PCR
n
Q
D
R
C
P4 DDR
n
Q
D
R
C
P4 DR
n
WP4P:
RP4P:
WP4D:
WP4:
RP4:
n = 0 to 7
Write to P4PCR
Read P4PCR
Write to P4DDR
Write to port 4
Read port 4
Write to external
address
Read external
address
Internal data bus (upper)
Internal data bus (lower)
8-bit bus mode
16-bit bus mode
Figure C.1 Port 4 Block Diagram

730
C.2
Port 6 Block Diagrams
WP6D:
WP6:
RP6:
Write to P6DDR
Write to port 6
Read port 6
RP6
input
WP6D
Reset
Q
D
R
C
P6 DDR
0
WP6
Reset
Q
D
R
C
P6 DR
0
P6
0
Inter
nal data b
u
s
Bus controller
WAIT
input
enable
Bus controller
WAIT
Figure C.2 (a) Port 6 Block Diagram (Pin P6
0
)

731
P6
1
WP6D:
WP6:
RP6:
Write to P6DDR
Write to port 6
Read port 6
WP6D
Reset
Q
D
R
C
P6 DDR
1
WP6
Reset
Q
D
R
C
P6 DR
1
RP6
Inter
nal data b
u
s
Bus
controller
Bus release
enable
BREQ input
Figure C.2 (b) Port 6 Block Diagram (Pin P6
1
)
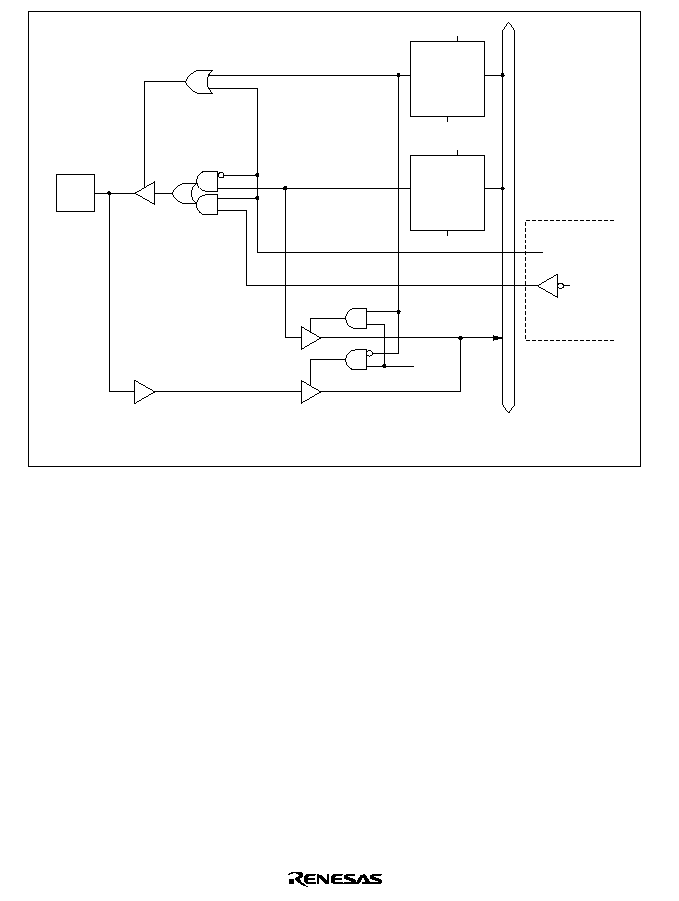
732
WP6D
Reset
Q
D
R
C
P6 DDR
2
WP6
Reset
Q
D
R
C
P6 DR
2
RP6
P6
2
WP6D:
WP6:
RP6:
Write to P6DDR
Write to port 6
Read port 6
Inter
nal data b
u
s
Bus controller
Bus release
enable
BACK
output
Figure C.2 (c) Port 6 Block Diagram (Pin P6
2
)

733
Read port 6
RP6:
Hardware standby
RP6
P6
7
output
output enable
Internal data bus
Figure C.2 (d) Port 6 Block Diagram (Pin P6
7
)
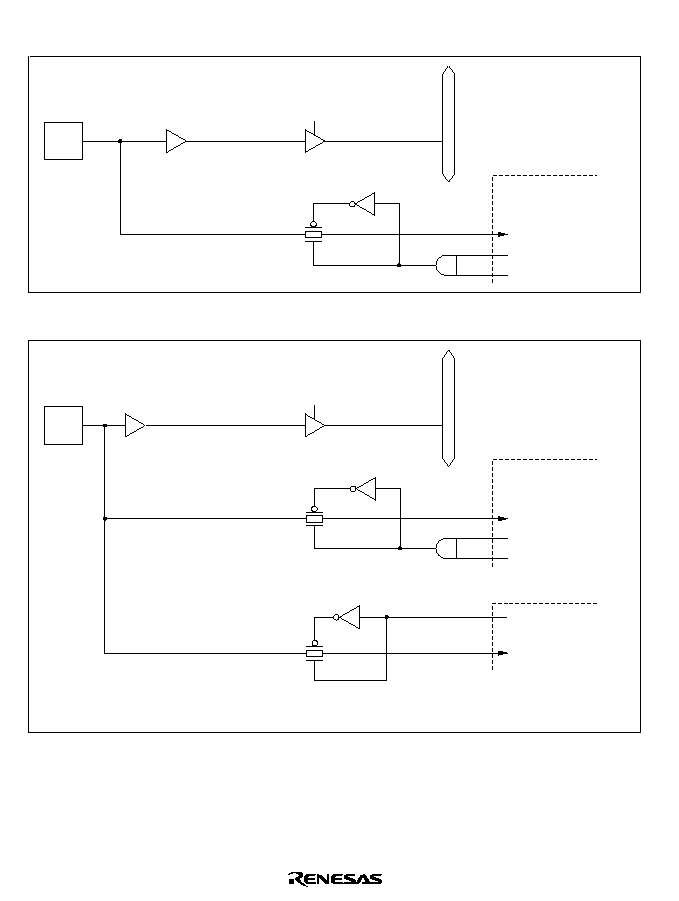
734
C.3
Port 7 Block Diagrams
P7
n
RP7
RP7: Read port 7
n = 0 to 5
Internal data bus
A/D converter
Input enable
Channel select signal
Analog input
Figure C.3 (a) Port 7 Block Diagram (Pins P7
0
to P7
5
)
P7
n
RP7
RP7: Read port 7
n = 6 and 7
Internal data bus
D/A converter
Analog output
Output enable
A/D converter
Input enable
Channel select signal
Analog input
Figure C.3 (b) Port 7 Block Diagram (Pins P7
6
and P7
7
)
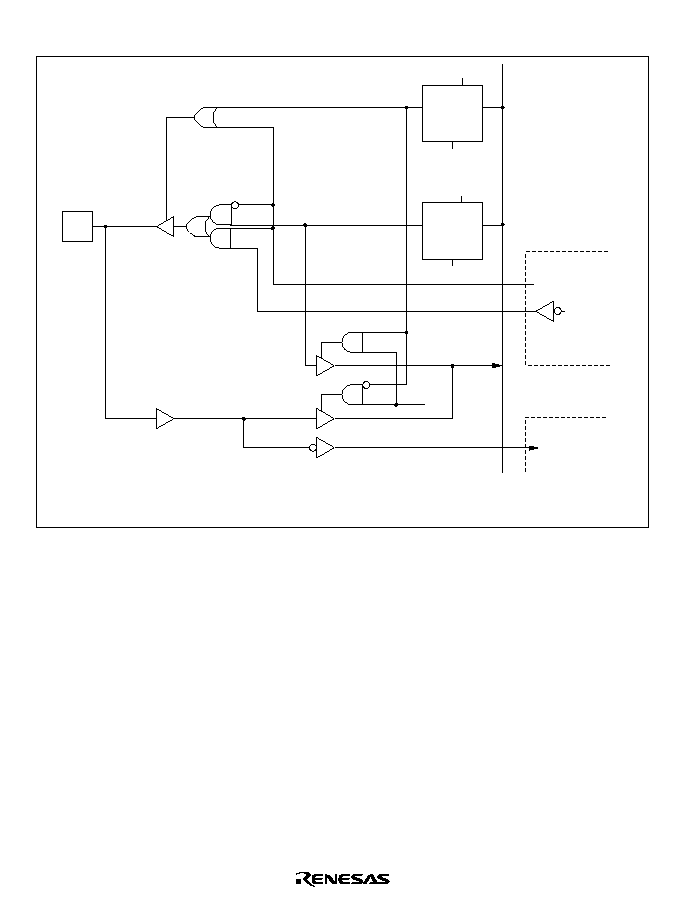
735
C.4
Port 8 Block Diagrams
P8
0
DDR
C
Q
D
WP8D
RP8
P8
0
Inter
nal data b
u
s
WP8
R
Reset
Reset
Refresh controller
Output enable
Interrupt controller
RFSH
output
IRQ
0
input
P8
0
DR
C
Q
D
R
WP8D:
WP8:
RP8:
Write to P8DDR
Write to port 8
Read port 8
Figure C.4 (a) Port 8 Block Diagram (Pin P8
0
)
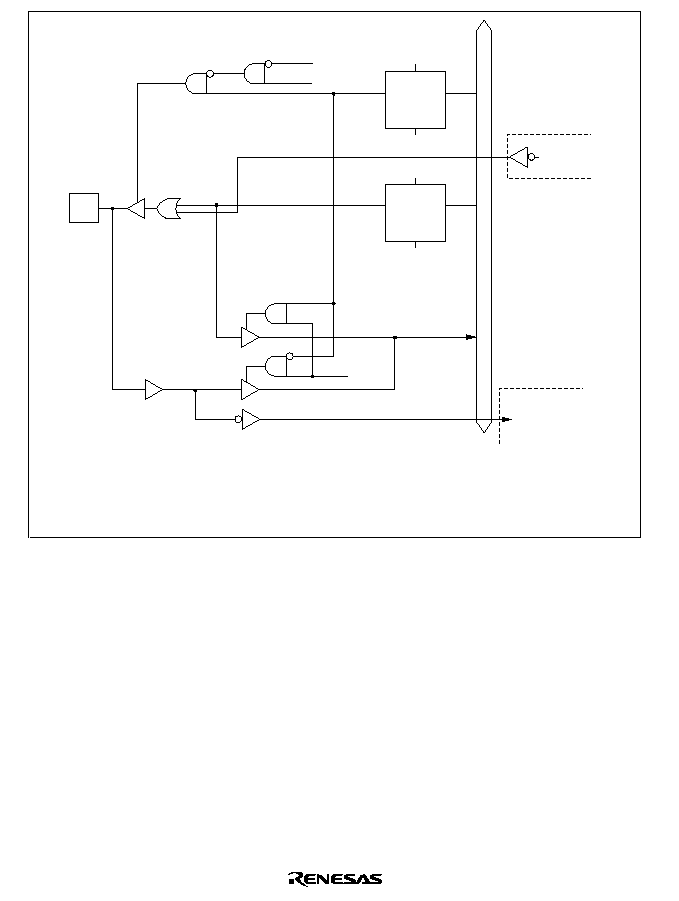
736
P8
n
DDR
C
Q
D
WP8D
P8
n
DR
C
Q
D
WP8
R
R
Reset
Internal data bus
RP8
P8
n
Bus controller
CS
2
CS
3
output
Reset
SSOE
Software
standby
Interrupt controller
IRQ
1
IRQ
2
input
Write to P8DDR
Write to port 8
Read port 8
Software standby output port enable
WP8D:
WP8:
RP8:
SSOE:
n = 1 and 2
Figure C.4 (b) Port 8 Block Diagram (Pins P8
1
, P8
2
)

737
A/D converter
WP8D
P8
3
DR
C
Q
D
WP8
R
Reset
Internal data bus
RP8
P8
3
Bus controller
CS
1
output
Reset
Interrupt controller
IRQ
3
input
ADTRG input
SSOE
Software
standby
P8
3
DDR
C
Q
D
R
Write to P8DDR
Write to port 8
Read port 8
Software standby output port enable
WP8D:
WP8:
RP8:
SSOE:
Figure C.4 (c) Port 8 Block Diagram (Pin P8
3
)
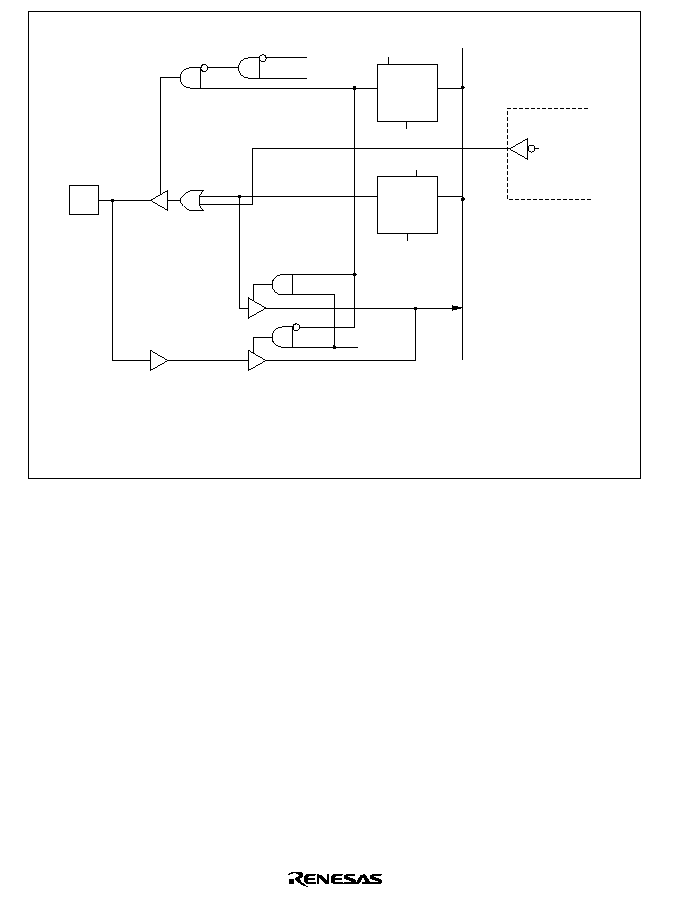
738
SSOE
Software
standby
R
P8
4
DDR
C
Q
D
WP8D
WP8
RP8
R
P8
4
DR
C
Q
D
P8
4
Internal data bus
Bus controller
CS
0
output
Reset
Reset
Write to P8DDR
Write to port 8
Read port 8
Software standby output port enable
WP8D:
WP8:
RP8:
SSOE:
Figure C.4 (d) Port 8 Block Diagram (Pin P8
4
)
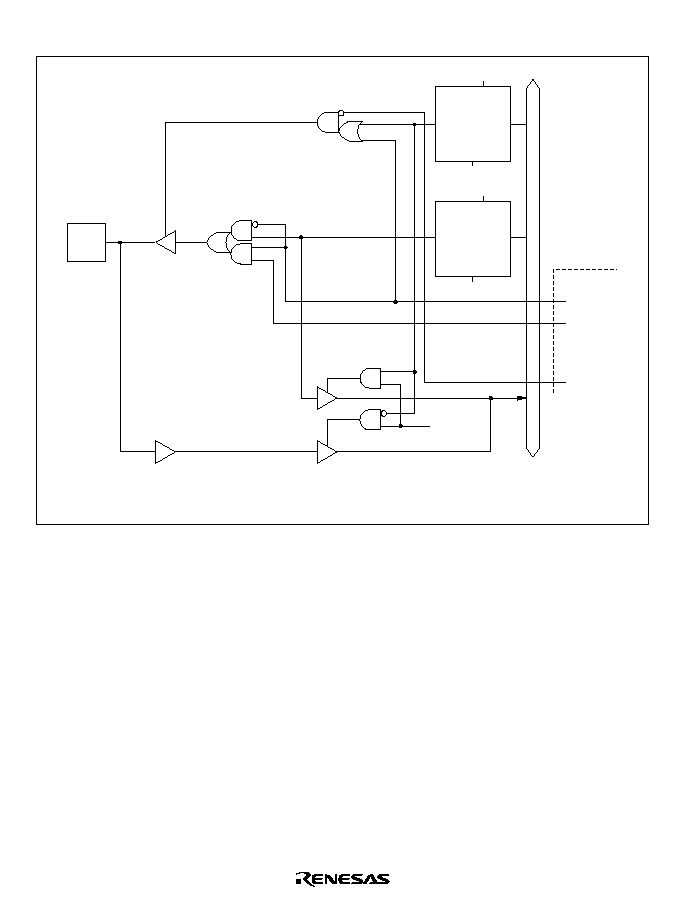
739
C.5
Port 9 Block Diagrams
WP9D:
WP9:
RP9:
Write to P9DDR
Write to port 9
Read port 9
P9
0
RP9
WP9D
Reset
Q
D
R
C
P9 DDR
0
WP9
Reset
Q
D
R
C
P9 DR
0
Internal data bus
SCI
Output
enable
Serial
transmit
data
Guard
time
Figure C.5 (a) Port 9 Block Diagram (Pin P9
0
)

740
P9
1
DDR
C
Q
D
WP9D
RP9
P9
1
Write to P9DDR
Write to port 9
Read port 9
WP9D:
WP9:
RP9:
WP9
R
Reset
Internal data bus
Reset
SCI
Output enable
Serial transmit data
Guard time
P9
1
DR
C
Q
D
R
Figure C.5 (b) Port 9 Block Diagram (Pin P9
1
)
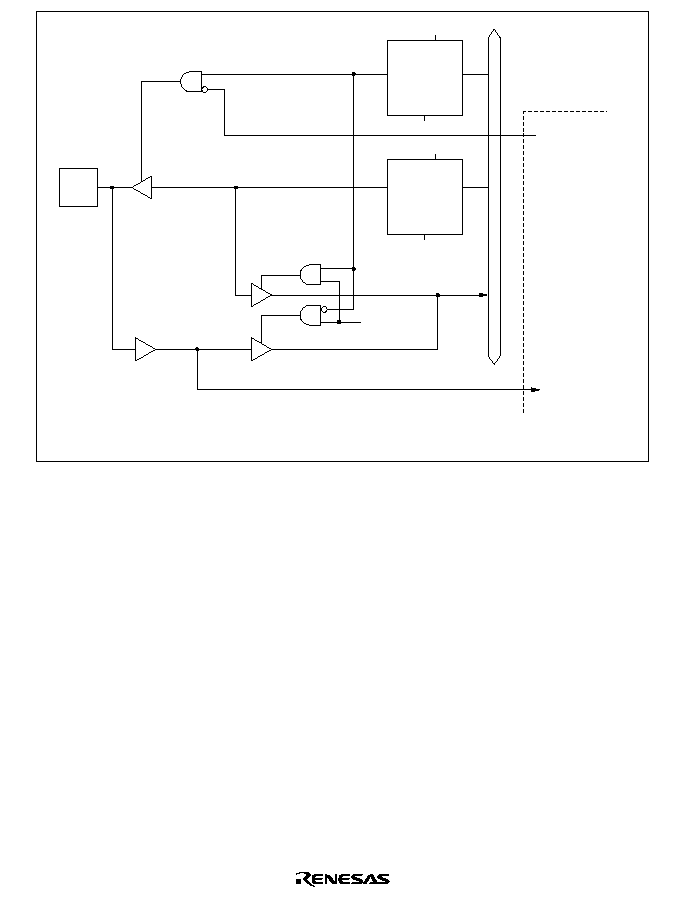
741
WP9D:
WP9:
RP9:
Write to P9DDR
Write to port 9
Read port 9
P9
2
WP9D
Reset
Q
D
R
C
P9 DDR
2
WP9
Reset
Q
D
R
C
P9 DR
2
RP9
Inter
nal data b
u
s
Input enable
Serial receive
data
SCI
Figure C.5 (c) Port 9 Block Diagram (Pin P9
2
)

742
P9
3
DDR
C
Q
D
WP9D
RP9
P9
3
DR
C
Q
D
P9
3
Serial receive data
Input enable
Write to P9DDR
Write to port 9
Read port 9
WP9D:
WP9:
RP9:
WP9
R
R
Reset
Internal data bus
Reset
SCI
Figure C.5 (d) Port 9 Block Diagram (Pin P9
3
)
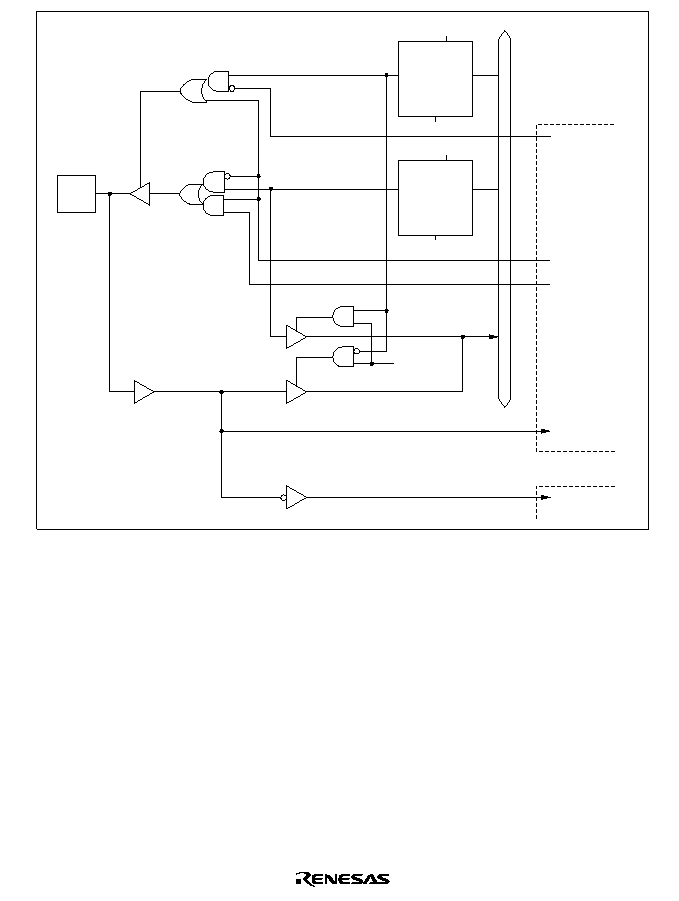
743
WP9D:
WP9:
RP9:
Write to P9DDR
Write to port 9
Read port 9
WP9D
Reset
Q
D
R
C
P9 DDR
4
WP9
Reset
Q
D
R
C
P9 DR
4
RP9
P9
4
Internal data bus
SCI
Clock input
enable
Clock output
enable
Clock output
Clock input
Interrupt
controller
input
IRQ
4
Figure C.5 (e) Port 9 Block Diagram (Pin P9
4
)
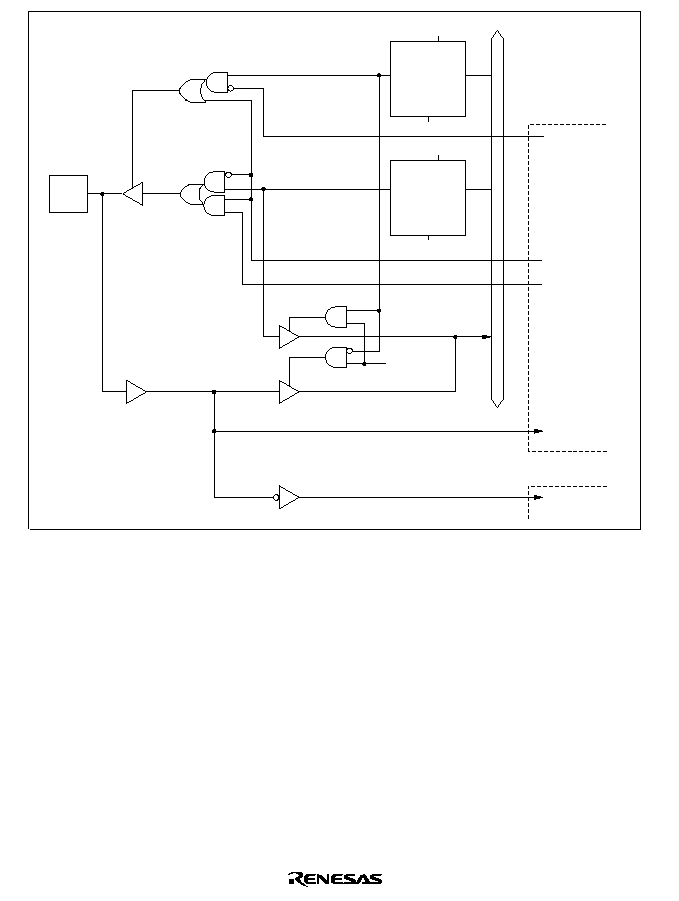
744
WP9D:
WP9:
RP9:
Write to P9DDR
Write to port 9
Read port 9
WP9D
Reset
Q
D
R
C
P9 DDR
5
WP9
Reset
Q
D
R
C
P9 DR
5
RP9
P9
5
Internal data bus
SCI
Clock input
enable
Clock output
enable
Clock output
Clock input
Interrupt
controller
input
IRQ
5
Figure C.5 (f) Port 9 Block Diagram (Pin P9
5
)

745
C.6
Port A Block Diagrams
WPAD:
WPA:
RPA:
n = 0 and 1
Write to PADDR
Write to port A
Read port A
PA
n
WPAD
Reset
Q
D
R
C
PA DDR
n
Reset
Q
D
R
C
PA DR
n
RPA
WPA
Inter
nal data b
u
s
TPC
output
enable
TPC
Next data
Output
trigger
Output
enable
Transfer
end output
DMA controller
Counter
clock input
16-bit timer
Counter
clock input
8-bit timer
Figure C.6 (a) Port A Block Diagram (Pins PA
0
, PA
1
)
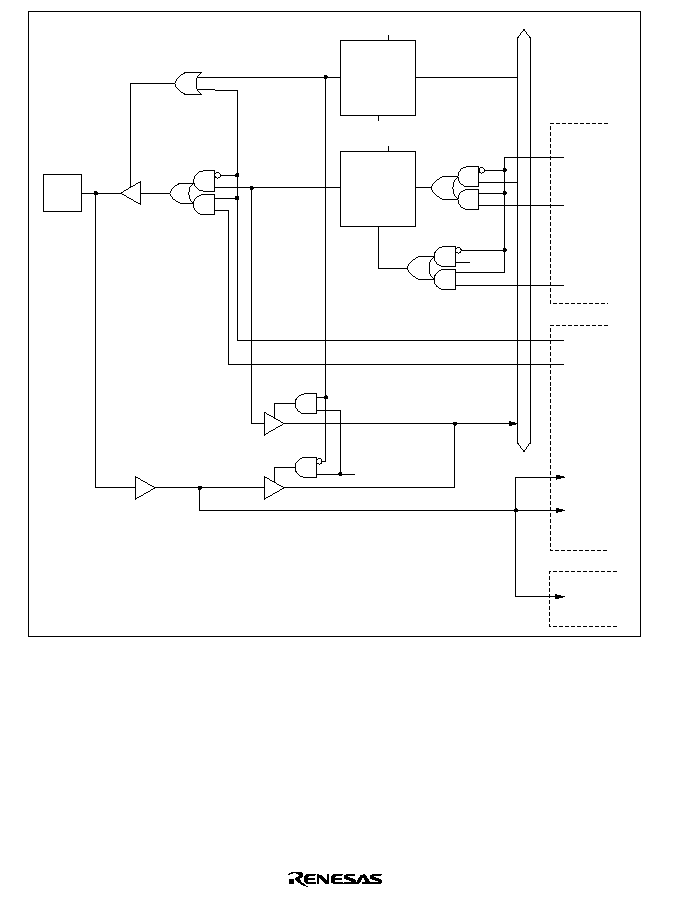
746
WPAD:
WPA:
RPA:
n = 2 and 3
Write to PADDR
Write to port A
Read port A
PA
n
RPA
WPA
WPAD
Reset
Q
D
R
C
PA DDR
n
Reset
Q
D
R
C
PA DR
n
Inter
nal data b
u
s
TPC
output
enable
TPC
Next
data
Output
trigger
Output
enable
Compare
match
output
Input
capture
Counter
clock
input
16-bit timer
Counter
clock input
8-bit timer
Figure C.6 (b) Port A Block Diagram (Pins PA
2
, PA
3
)

747
WPAD:
WPA:
RPA:
SSOE:
n = 4 to 7
Note: PA
7
address output enable is fixed at 1 in modes 3 and 4.
Write to PADDR
Write to port A
Read port A
Software standby output port enable
PA
n
WPAD
Reset
PRA
WPA
Q
D
R
C
PA
n
DDR
Reset
Q
D
R
C
PA
n
DR
Internal address bus
Internal data bus
TPC
16-bit timer
TPC output
enable
Next data
Output trigger
Output enable
Compare match
output
Input capture
Software standby
SSOE
Bus released
Mode 3/4
Address output enable
Figure C.6 (c) Port A Block Diagram (Pins PA
4
to PA
7
)

748
C.7
Port B Block Diagrams
R
PB
n
DDR
C
Q
D
Reset
WPBD
WPB
RPB
R
PB
n
DR
C
Q
D
Reset
Bus released
PB
n
Internal data bus
TPC
8-bit timer
TPC output enable
Bus controller
CS output enable
CS7
CS5 output
Next data
Output trigger
Output enable
Compare match output
Software standby
SSOE
WPBD:
WPB:
RPB:
SSOE:
n = 0 and 2
Write to PBDDR
Write to port B
Read port B
Software standby output port enable
Figure C.7 (a) Port B Block Diagram (Pins PB
0
, PB
2
)
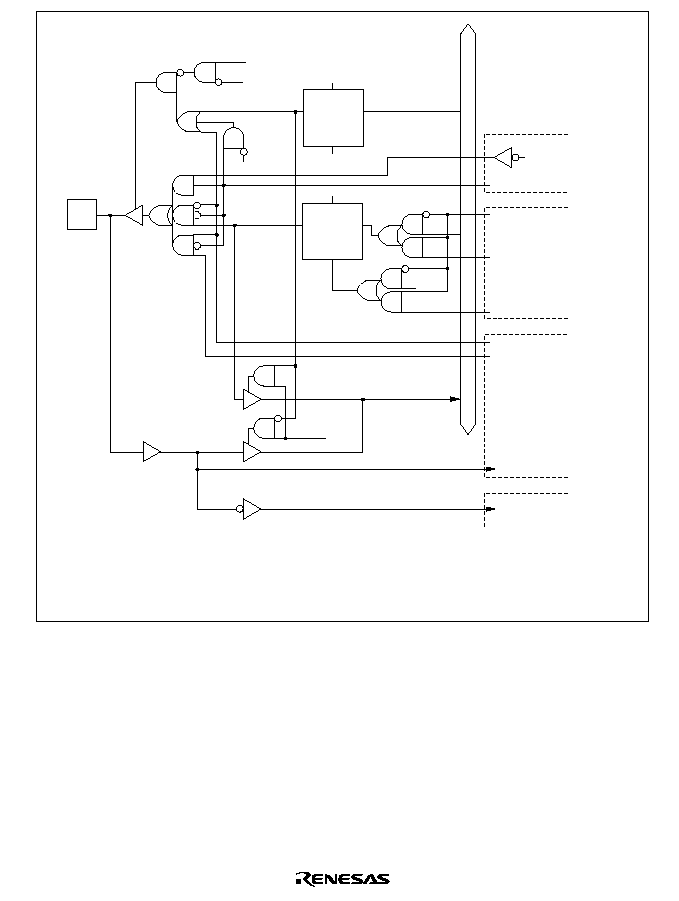
749
R
PB
n
DDR
C
Q
D
Reset
WPBD
WPB
RPB
R
PB
n
DR
C
Q
D
Reset
PB
n
Internal data bus
TPC
8-bit timer
TPC output enable
Bus controller
CS output enable
CS6
CS4 output
Next data
Output trigger
Output enable
Compare match output
DMAC
DREQ0
DREQ1 input
TMO2
TMO3 input
Bus released
Software standby
SSOE
Write to PBDDR
Write to port B
Read port B
Software standby output port enable
WPBD:
WPB:
RPB:
SSOE:
n = 1 and 3
Figure C.7 (b) Port B Block Diagram (Pins PB
1
, PB
3
)
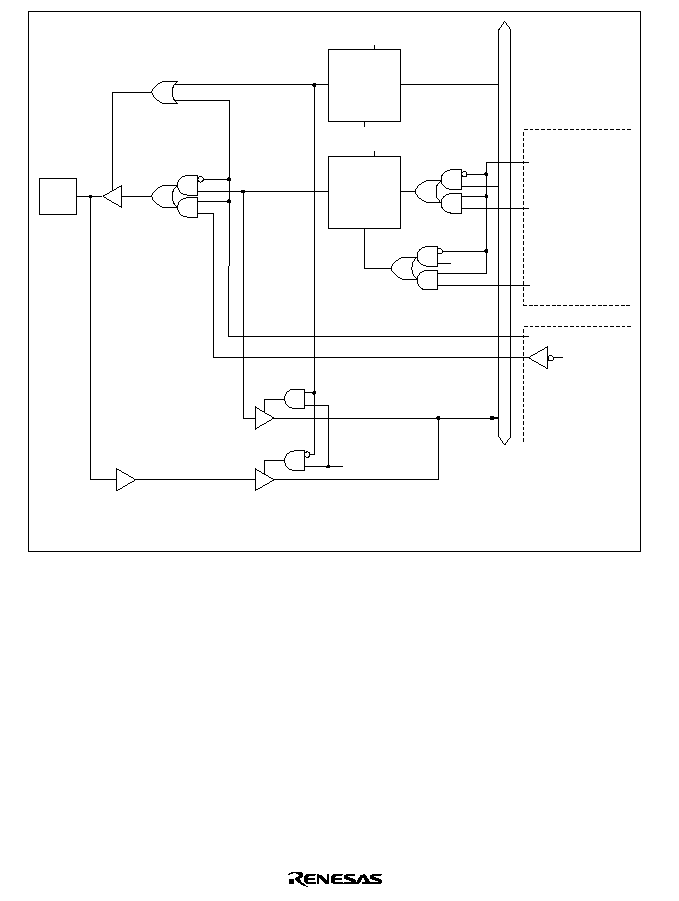
750
PB
4
WPBD:
WPB:
RPB:
Write to PBDDR
Write to port B
Read port B
WPB
RPB
Reset
Q
D
R
C
PB DDR
4
WPBD
Reset
Q
D
R
C
PB DR
4
Inter
nal data b
u
s
TPC output
enable
Next data
Output trigger
CAS output enable
CAS output
TPC
Bus controller
Figure C.7 (c) Port B Block Diagram (Pin PB
4
)
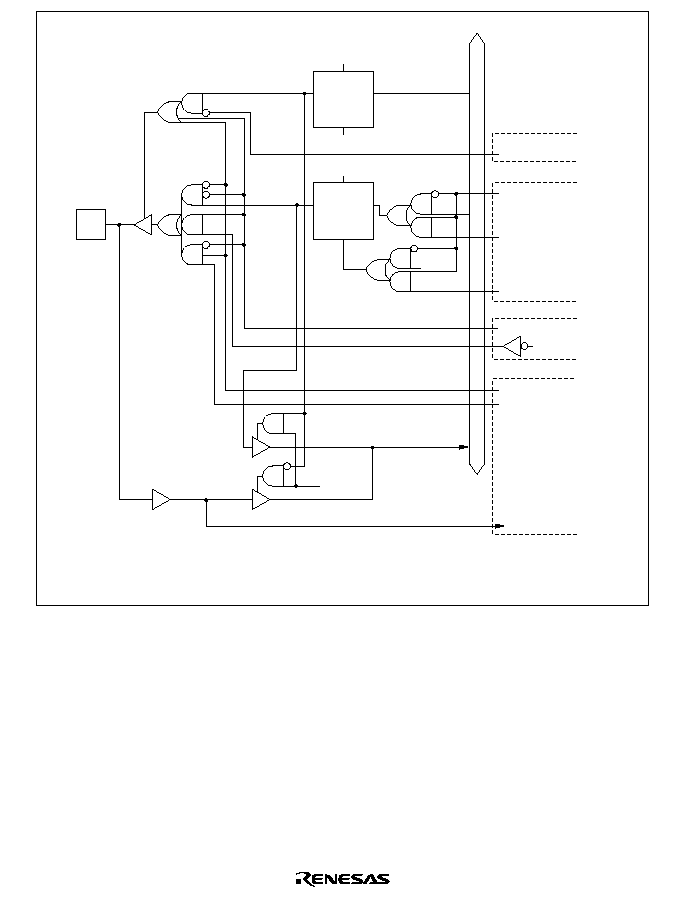
751
R
PB
5
DDR
C
Q
D
Reset
WPBD
WPB
RPB
R
PB
5
DR
C
Q
D
Reset
PB
5
Internal data bus
TPC
SCI
TPC output enable
SCI
Next data
Output trigger
Clock output enable
Clock input
enable
Clock output
Clock input
Bus controller
CAS output enable
CAS output
Write to PBDDR
Write to port B
Read port B
WPBD:
WPB:
RPB:
Figure C.7 (d) Port B Block Diagram (Pin PB
5
)

752
WPBD
Reset
Reset
Q
D
R
C
PB DDR
Q
D
R
C
PB DR
6
RPB
WPB
TPC
SCI
WPBD:
WPB:
RPB:
Write to PBDDR
Write to port B
Read port B
TPC output enable
Next data
Output trigger
Output enable
Serial transmit data
Guard time
Internal data bus
6
PB
6
Figure C.7 (e) Port B Block Diagram (Pin PB
6
)

753
PB
7
WPBD
Reset
Reset
Q
D
R
C
PB DDR
Q
D
R
C
PB DR
7
RPB
WPB
SCI
TPC
SCI
WPBD:
WPB:
RPB:
Write to PBDDR
Write to port B
Read port B
TPC output
enable
Next data
Input enable
Output trigger
Inter
nal data b
u
s
7
Serial receive
data
Figure C.7 (f) Port B Block Diagram (Pin PB
7
)
754
Appendix D Pin States
D.1
Port States in Each Mode
Table D.1
Port States in Each Processing State
Port Name
Pin Name
Mode
Reset
Hardware
Standby
Mode
Software Standby Mode
Bus-Released State
Program
Execution
State
RESO
--
T*
1
T
T
T*
1
T*
1
A
19
to A
0
1 to 4
L
T
[SSOE = 0]
T
[SSOE = 1]
Keep
T
A
19
to A
0
D
15
to D
8
1 to 4
T
T
T
T
D
15
to D
8
AS
,
RD
,
HWR
,
LWR
1 to 4
H
T
[SSOE = 0]
T
[SSOE = 1]
H
T
AS
,
RD
,
HWR
,
LWR
P4
7
to P4
0
1, 3
T
T
Keep
Keep
I/O port
2, 4
T
T
T
T
D
7
to D
0
P6
0
1 to 4
T
T
Keep
Keep
I/O port
WAIT
P6
1
1 to 4
T
T
[BRLE = 0]
Keep
[BRLE = 1]
T
T
I/O port
BREQ
P6
2
1 to 4
T
T
[BRLE = 0]
Keep
[BRLE = 1]
H
L
[BRLE = 0]
I/O port
[BRLE = 1]
BACK
P6
7
1 to 4
Clock
output
T
[PSTOP = 0]
H
[PSTOP = 1]
Keep
[PSTOP = 0]
[PSTOP = 1]
Keep
[PSTOP = 0]
[PSTOP = 1]
Input port
P7
7
to P7
0
1 to 4
T
T
T
T
Input port

755
Port Name
Pin Name
Mode
Reset
Hardware
Standby
Mode
Software Standby Mode
Bus-Released State
Program
Execution
State
P8
0
1 to 4
T
T
∑
When DRAM space
is not selected*
2
[RFSHE = 0]
Keep
[RFSHE = 1]
Illegal setting
∑
When DRAM space
is selected*
3
[RFSHE = 0]
Keep
[RFSHE = 1,
SRFMD = 0, SSOE = 0]
T
[RFSHE = 1,
SRFMD = 0, SSOE = 1]
H
[RFSHE = 1,
SRFMD = 1]
RFSH
∑
When DRAM space
is not selected*
2
[RFSHE = 0]
Keep
[RFSHE = 1]
Illegal setting
∑
When DRAM space
is selected*
3
[RFSHE = 0]
Keep
[RFSHE = 1]
T
[RFSHE = 0]
I/O port
[RFSHE = 1]
RFSH
P8
1
1 to 4
T
T
∑
RAS
3
output*
4
[SSOE = 0]
T
[SSOE = 1]
H
∑
Otherwise*
5
[DDR = 0]
T
[DDR = 1, SSOE = 0]
T
[DDR = 1, SSOE = 1]
H
∑
RAS
3
output*
4
T
∑
Otherwise*
5
[DDR = 0]
Keep
[DDR = 1]
T
∑
RAS
3
output
RAS
3
∑
Otherwise
[DDR = 0]
Input port
[DDR = 1]
CS
3
756
Port Name
Pin Name
Mode
Reset
Hardware
Standby
Mode
Software Standby Mode
Bus-Released State
Program
Execution
State
P8
2
1 to 4
T
T
∑
RAS
2
output*
3
[SSOE = 0]
T
[SSOE = 1]
H
∑
Otherwise*
2
[DDR = 0]
T
[DDR = 1, SSOE = 0]
T
[DDR = 1, SSOE = 1]
H
∑
RAS
2
output*
3
T
∑
Otherwise*
2
[DDR = 0]
Keep
[DDR = 1]
T
∑
RAS
2
output
RAS
2
∑
Otherwise
[DDR = 0]
Input port
[DDR = 1]
CS
2
P8
3
1 to 4
T
T
[DDR = 0]
T
[DDR = 1, SSOE = 0]
T
[DDR = 1, SSOE = 1]
H
[DDR = 0]
Keep
[DDR = 1]
T
[DDR = 0]
Input port
[DDR = 1]
CS
1
P8
4
1 to 4
H
T
[DDR = 0]
T
[DDR = 1, SSOE = 0]
T
[DDR = 1, SSOE = 1]
H
[DDR = 0]
Keep
[DDR = 1]
T
[DDR = 0]
Input port
[DDR = 1]
CS
0
P9
5
to P9
0
1 to 4
T
T
Keep
Keep
I/O port
PA
3
to PA
0
1 to 4
T
T
Keep
Keep
I/O port
PA
6
to PA
4
1, 2
T
T
Keep
Keep
I/O port
3, 4
T
T
∑
Address output*
6
[SSOE = 0]
T
[SSOE = 1]
Keep
∑
Otherwise*
7
Keep
∑
Address output*
6
T
∑
Otherwise*
7
Keep
∑
Address
output
A
23
to A
21
∑
Otherwise
I/O port

757
Port Name
Pin Name
Mode
Reset
Hardware
Standby
Mode
Software Standby Mode
Bus-Released State
Program
Execution
State
PA
7
1, 2
T
T
Keep
Keep
I/O port
3, 4
L
T
[SSOE = 0]
T
[SSOE = 1]
Keep
T
A
20
PB
1
, PB
0
1 to 4
T
T
∑
CS output*
8
[SSOE = 0]
T
[SSOE = 1]
H
∑
Otherwise*
9
Keep
∑
CS output*
8
T
∑
Otherwise*
9
Keep
∑
CS output
CS
7
,
CS
6
∑
Otherwise
I/O port
PB
2
1 to 4
T
T
∑
RAS
5
output*
10
[SSOE = 0]
T
[SSOE = 1]
H
∑
CS output*
11
[SSOE = 0]
T
[SSOE = 1]
H
∑
Otherwise*
12
Keep
∑
RAS
5
output*
10
T
∑
CS output *
11
T
∑
Otherwise*
12
Keep
∑
RAS
5
output
RAS
5
∑
CS output
CS
5
∑
Otherwise
I/O port
PB
3
1 to 4
T
T
∑
RAS
4
output*
13
[SSOE = 0]
T
[SSOE = 1]
H
∑
CS output*
14
[SSOE = 0]
T
[SSOE = 1]
H
∑
Otherwise*
15
Keep
∑
RAS
4
output*
13
T
∑
CS output *
14
T
∑
Otherwise*
15
Keep
∑
RAS
4
output
RAS
4
∑
CS output
CS
4
∑
Otherwise
I/O port

758
Port Name
Pin Name
Mode
Reset
Hardware
Standby
Mode
Software Standby Mode
Bus-Released State
Program
Execution
State
PB
5
, PB
4
1 to 4
T
T
∑
CAS output*
16
[SSOE = 0]
T
[SSOE = 1]
H
∑
Otherwise*
17
Keep
∑
CAS output*
16
T
∑
Otherwise*
17
Keep
∑
CAS output
UCAS
,
LCAS
∑
Otherwise
I/O port
PB
7
, PB
6
1 to 4
T
T
Keep
Keep
I/O port
Legend
H:
High
L:
Low
T:
High-impedance state
Keep: Input pins are in the high-impedance state; output pins maintain their previous state.
DDR: Data direction register
Notes: 1. Low only when WDT overflow causes a reset.
2. When bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control register A) are all
cleared to 0.
3. When any of bits DRAS2, DRAS1, or DRAS0 in DRCRA (DRAM control register A) is
set to 1.
4. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is 010, 100, or 101.
5. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is other than 010, 100, or 101.
6. When bit A23E, A22E, or A21E, respectively, in BRCR (bus release control register) is
cleared to 0.
7
When bit A23E, A22E, or A21E, respectively, in BRCR (bus release control register) is
set to 1.
8. When bit CS7E or CS6E, respectively, in CSCR (chip select control register) is set to 1.
9. When bit CS7E or CS6E, respectively, in CSCR (chip select control register) is cleared
to 0.
10. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is 101.
11. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is other than 101, and bit CS5E in CSCR (chip select control register) is set
to 1.
12. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is other than 101, and bit CS5E in CSCR (chip select control register) is
cleared to 0.
13. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is 100, 101, or 110.

759
14. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is other than 100, 101, or 110, and bit CS4E in CSCR (chip select control
register) is set to 1.
15. When the setting of bits DRAS2, DRAS1, and DRAS0 in DRCRA (DRAM control
register A) is other than 100, 101, or 110, and bit CS4E in CSCR (chip select control
register) is cleared to 0.
16. When any of bits DRAS2, DRAS1, or DRAS0 in DRCRA (DRAM control register A) is
set to 1, and bit CSEL in DRCRB (DRAM control register B) is cleared to 0.
17. When any of bits DRAS2, DRAS1, or DRAS0 in DRCRA (DRAM control register A) is
set to 1, and bit CSEL in DRCRB (DRAM control register B) is set to 1; or, when bits
DRAS2, DRAS1, and DRAS0 are cleared to 0.
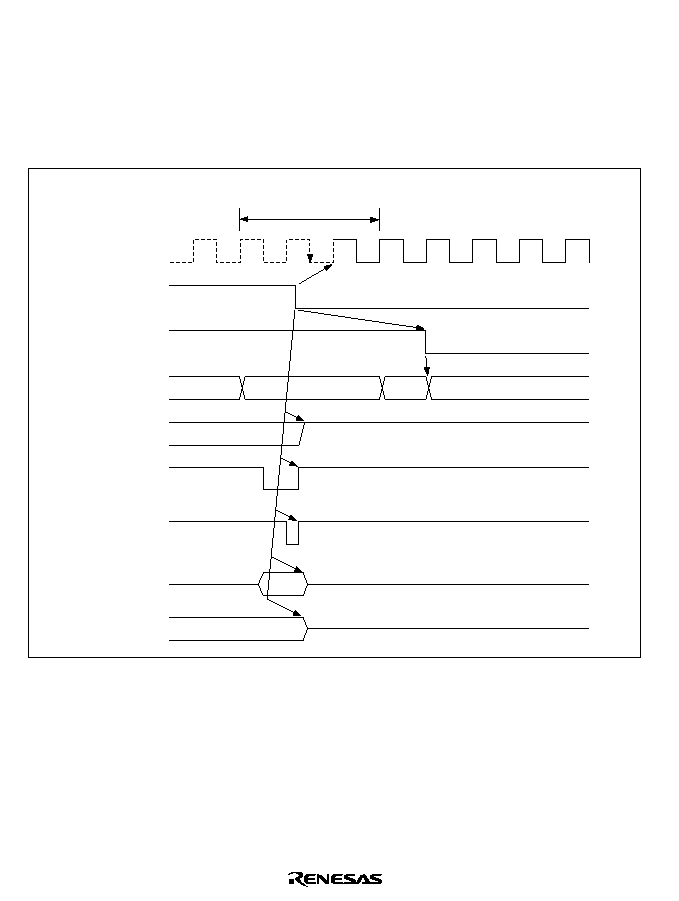
760
D.2
Pin States at Reset
Modes 1 and 2: Figure D.1 is a timing diagram for the case in which
RES goes low during an
external memory access in mode 1 or 2. As soon as
RES goes low, all ports are initialized to the
input state.
AS, RD, HWR, LWR, and CS
0
go high, and D
15
to D
0
go to the high-impedance state.
The address bus is initialized to the low output level 2.5
clock cycles after the low level of
RES
is sampled. Clock pin P6
7
/
goes to the output state at the next rise of
after
RES goes low.
AS
,
RD
(read)
D
15
to D
0
(write)
HWR
,
LWR
(write)
Internal reset
signal
RES
P6
7
/
I/O port,
CS
7
to
CS
1
CS
0
A
19
to A
0
T1
T2
T3
Access to external
memory
H'00000
High impedance
High impedance
Figure D.1 Reset during Memory Access (Modes 1 and 2)
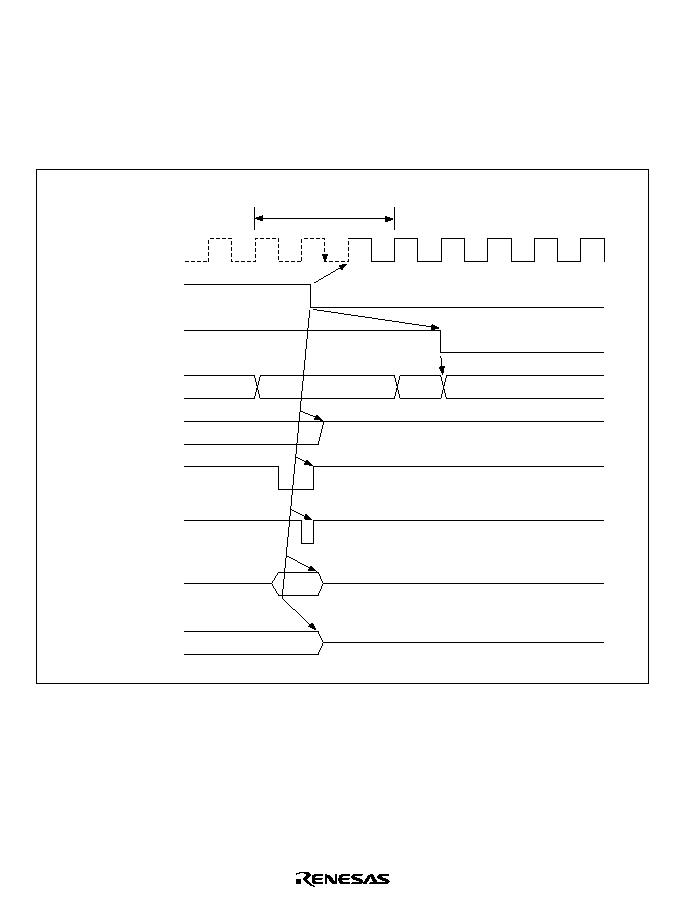
761
Modes 3 and 4: Figure D.2 is a timing diagram for the case in which
RES goes low during an
external memory access in mode 3 or 4. As soon as
RES goes low, all ports are initialized to the
input state.
AS, RD, HWR, LWR, and CS
0
go high, and D
15
to D
0
go to the high-impedance state.
The address bus is initialized to the low output level 2.5
clock cycles after the low level of
RES
is sampled. However, when PA
4
to PA
6
are used as address bus pins, or when P8
3
to P8
1
and PB
0
to PB
3
are used as CS output pins, they go to the high-impedance state at the same time as
RES
goes low. Clock pin P6
7
/
goes to the output state at the next rise of
after
RES goes low.
T1
T2
T3
Access to external
memory
H'000000
High impedance
High impedance
AS
,
RD
(read)
D
15
to D
0
(write)
HWR
,
LWR
(write)
Internal reset
signal
RES
P6
7
/
I/O port,
PA
4
/A
23
to PA
6
/
A
21
,
CS
7
to
CS
1
CS
0
A
20
to A
0
Figure D.2 Reset during Memory Access (Modes 3 and 4)
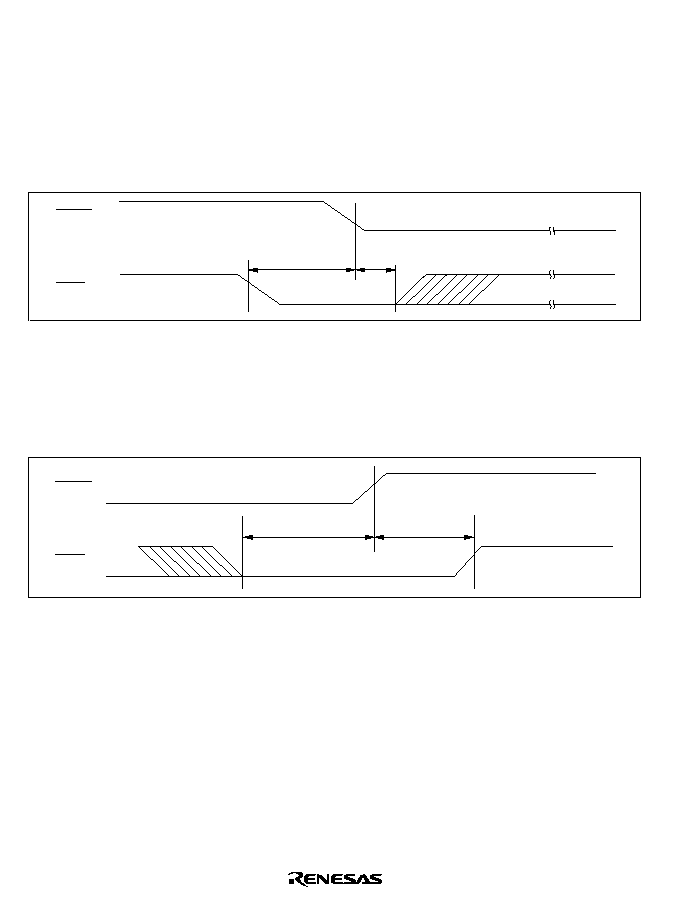
762
Appendix E Timing of Transition to and Recovery from
Hardware Standby Mode
Timing of Transition to Hardware Standby Mode
(1) To retain RAM contents with the RAME bit set to 1 in SYSCR, drive the
RES signal low 10
system clock cycles before the
STBY signal goes low, as shown below. RES must remain low
until
STBY goes low (minimum delay from STBY low to RES high: 0 ns).
t
1
10t
cyc
t
2
0 ns
STBY
RES
(2) To retain RAM contents with the RAME bit cleared to 0 in SYSCR, or when RAM contents
do not need to be retained,
RES does not have to be driven low as in (1).
Timing of Recovery from Hardware Standby Mode: Drive the
RES signal low approximately
100 ns before
STBY goes high.
STBY
RES
t
100 ns
t
OSC
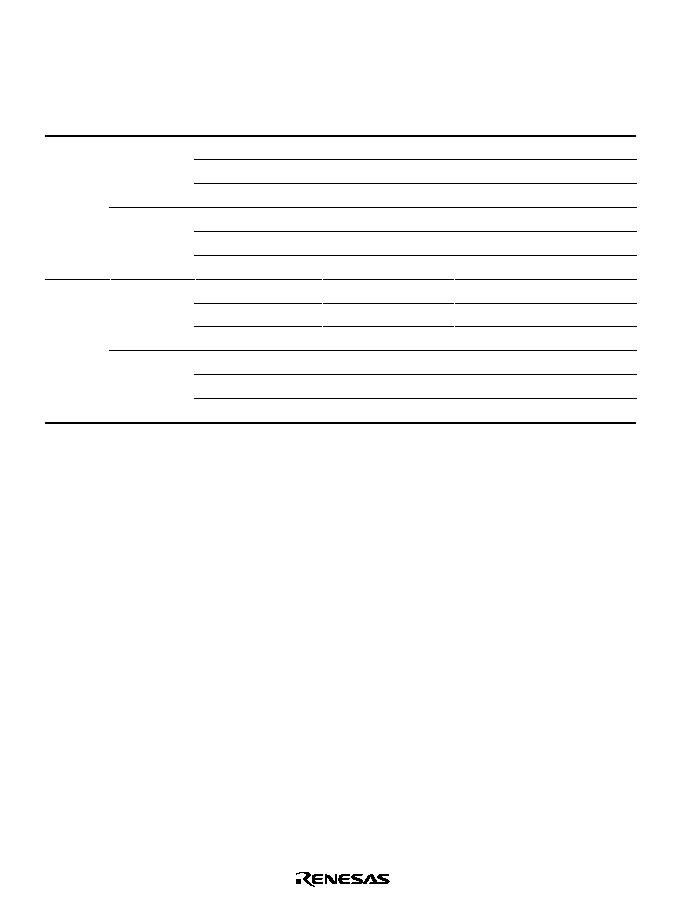
763
Appendix F List of Product Codes
Table F.1
H8/3007, H8/3006 Product Code Lineup
Product Type
Product Code
Mark Code
Package
(Hitachi Package Code)
H8/3007
5.0 V ± 10% HD6413007F
HD6413007F
100-pin QFP (FP-100B)
(5 V)
HD6413007TE
HD6413007TE
100-pin TQFP (TFP-100B)
HD6413007FP
HD6413007FP
100-pin QFP (FP-100A)
2.7 to 5.5 V
HD6413007VF
HD6413007VF
100-pin QFP (FP-100B)
(Low
HD6413007VTE
HD6413007VTE
100-pin TQFP (TFP-100B)
voltage)
HD6413007VFP
HD6413007VFP
100-pin QFP (FP-100A)
H8/3006
5.0 V ± 10% HD6413006F
HD6413006F
100-pin QFP (FP-100B)
(5 V)
HD6413006TE
HD6413006TE
100-pin TQFP (TFP-100B)
HD6413006FP
HD6413006FP
100-pin QFP (FP-100A)
2.7 to 5.5 V
HD6413006VF
HD6413006VF
100-pin QFP (FP-100B)
(Low
HD6413006VTE
HD6413006VTE
100-pin TQFP (TFP-100B)
voltage)
HD6413006VFP
HD6413006VFP
100-pin QFP (FP-100A)
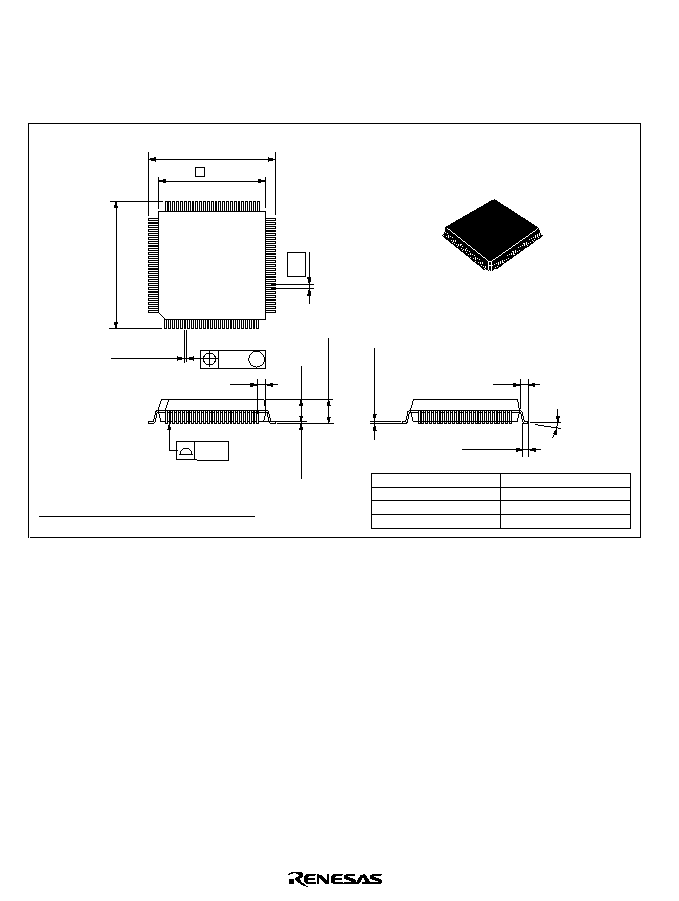
764
Appendix G Package Dimensions
Figure G.1 shows the FP-100B package dimensions of the H8/3006 and H8/3007. Figure G.2
shows the TFP-100B package dimensions. Figure G.3 shows the FP-100A package dimentions.
Hitachi Code
JEDEC
EIAJ
Weight (reference value)
FP-100B
--
Conforms
1.2 g
Unit: mm
*Dimension including the plating thickness
Base material dimension
0.10
16.0
±
0.3
1.0
0.5
±
0.2
16.0
±
0.3
3.05 Max
75
51
50
26
1
25
76
100
14
0
∞
≠ 8
∞
0.5
0.08 M
*0.22
±
0.05
2.70
*0.17
±
0.05
0.12
+0.13 ≠0.12
1.0
0.20
±
0.04
0.15
±
0.04
Figure G.1 Package Dimensions (FP-100B)
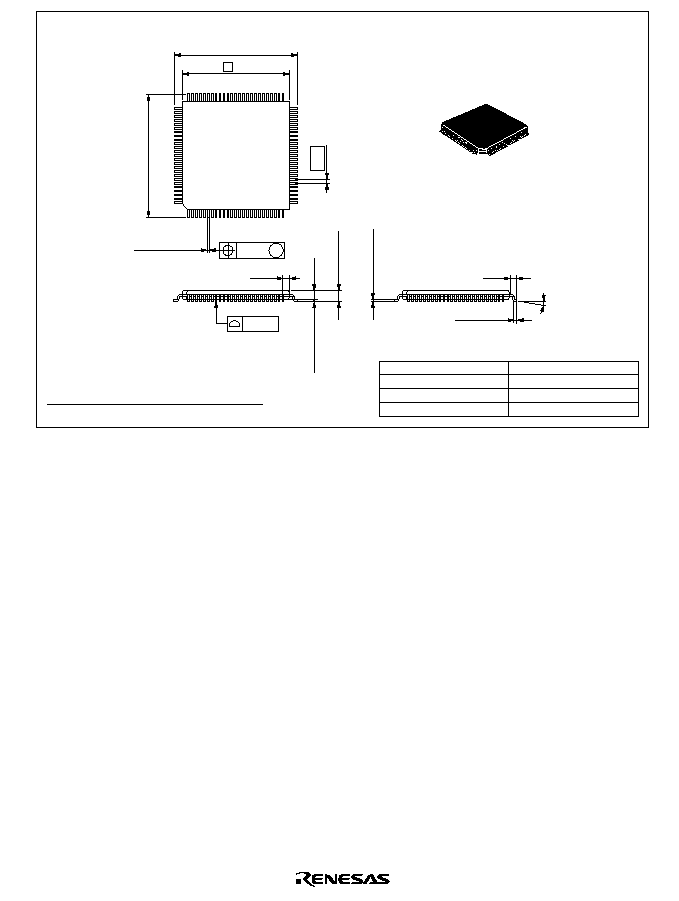
765
Hitachi Code
JEDEC
EIAJ
Weight (reference value)
TFP-100B
--
Conforms
0.5 g
Unit: mm
*Dimension including the plating thickness
Base material dimension
16.0
±
0.2
14
0.08
0.10
0.5
±
0.1
16.0
±
0.2
0.5
0.10
±
0.10
1.20 Max
*0.17
±
0.05
0
∞
≠ 8
∞
75
51
1
25
76
100
26
50
M
*0.22
±
0.05
1.0
1.00
1.0
0.20
±
0.04
0.15
±
0.04
Figure G.2 Package Dimensions (TFP-100B)
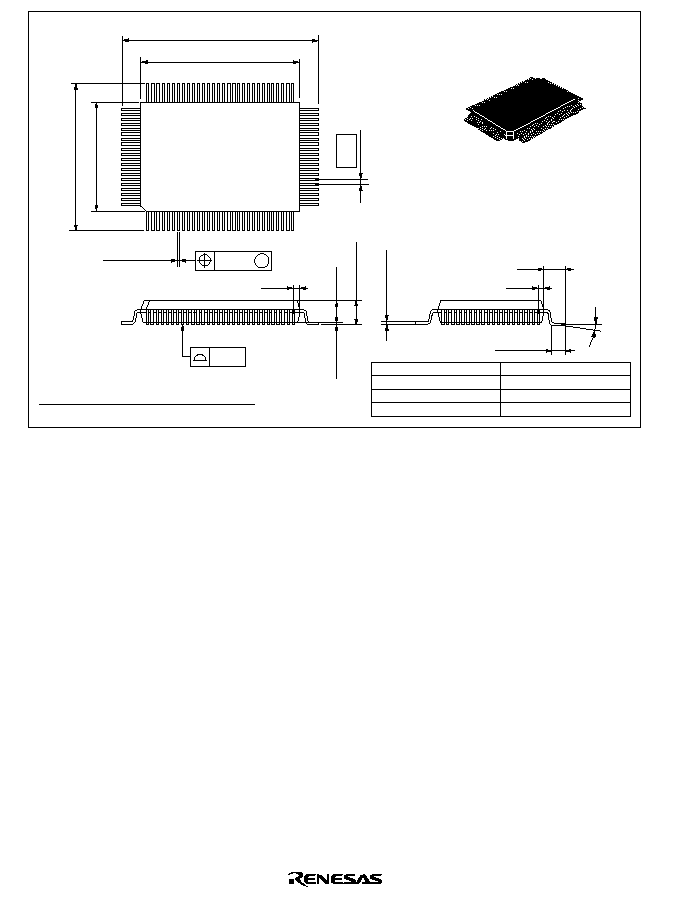
766
Hitachi Code
JEDEC
EIAJ
Weight (reference value)
FP-100A
--
--
1.7 g
Unit: mm
*Dimension including the plating thickness
Base material dimension
0.13 M
0
∞
≠ 10
∞
*0.32
±
0.08
*0.17
±
0.05
3.10 Max
1.2
±
0.2
24.8
±
0.4
20
80
51
50
31
30
1
100
81
18.8
±
0.4
14
0.15
0.65
2.70
2.4
0.20
+0.10 ≠
0.20
0.58
0.83
0.30
±
0.06
0.15
±
0.04
Figure G.3 Package Dimensions (FP-100A)

767
Appendix H Comparison of H8/300H Series Product
Specifications
H.1
Differences between H8/3067 and H8/3062 Series, H8/3048 Series,
H8/3006 and H8/3007, and H8/3002
Item
H8/3067, H8/3062
Series
H8/3048
Series
H8/3006, H8/3007
H8/3002
1
Operating
mode
Mode 5
16 MB ROM enabled
expanded mode
1 MB ROM
enabled
expanded
mode
Mode 6
64 KB single-chip mode
16 MB ROM
enabled
expanded
mode
2
Interrupt
controller
Internal interrupt
sources
36 (H8/3067)
27 (H8/3062)
30
36
30
3
Bus
controller
Burst ROM
interface
Yes (H8/3067)
No (H8/3062)
No
Yes
No
Idle cycle
insertion function
Yes
No
Yes
No
Wait mode
2 modes
4 modes
2 modes
4 modes
Wait state number
setting
Per area
Common
to all areas
Per area
Common
to all areas
Address output
method
Choice of address update
mode (mask ROM and
flash memory R versions
only)
Fixed
Fixed
Fixed
4
DRAM
interface
Connectable
areas
Area 2/3/4/5
(H8/3067 only)
Area 3
Area 2/3/4/5
Area 3
Precharge cycle
insertion function
Yes (H8/3067 only)
No
Yes
No
Fast page mode Yes (H8/3067 only)
No
Yes
No
Address shift
amount
8 bit/9 bit/10 bit
(H8/3067 only)
8 bit/9 bit
8 bit/9 bit/10 bit
8 bit/9 bit

768
Item
H8/3067, H8/3062
Series
H8/3048
Series
H8/3006, H8/3007
H8/3002
5
Timer functions
16-bit
timers
8-bit
timers
ITU
16-bit
timers
8-bit
timers
ITU
Number of
channels
16 bits
◊
3
8 bits
◊
4
(16 bits
◊
2)
16 bits
◊
5
16 bits
◊
3
8 bits
◊
4
(16 bits
◊
2)
16 bits
◊
5
Pulse output
6 pins
4 pins
(2 pins)
12 pins
6 pins
4 pins
(2 pins)
12 pins
Input capture
6
2
10
6
2
10
External clock
4 systems
(selectable)
4 systems
(fixed)
4 systems
(selectable)
4 systems
(selectable)
4 systems
(fixed)
4 systems
(selectable)
Internal clock
,
/2,
/4,
/8
/8,
/64,
/8192
,
/2,
/4,
/8
,
/2,
/4,
/8
/8,
/64,
/8192
,
/2,
/4,
/8
Complementary
PWM function
No
No
Yes
No
No
Yes
Reset-
synchronous
PWM function
No
No
Yes
No
No
Yes
Buffer operation
No
No
Yes
No
No
Yes
Output
initialization
function
Yes
No
No
Yes
No
No
PWM output
3
4 (2)
5
3
4 (2)
5
DMAC activation 3 channels
(H8/3067
only)
No
4 channels 3 channels No
4 channels
A/D conversion
activation
No
Yes
No
No
Yes
No
Interrupt sources 3 sources
◊
3
8 sources
3 sources
◊
5
3 sources
◊
3
8 sources
3 sources
◊
5
6
TPC
Time base
3 kinds, 16-bit timer
base
4 kinds,
ITU base
3 kinds, 16-bit timer
base
4 kinds,
ITU base
7
WDT
Reset signal
external output
function
Yes (except products
with on-chip flash
memory)
Yes
Yes
Yes
8
SCI
Number of
channels
3 channels (H8/3067)
2 channels (H8/3062)
2 channels 3 channels
2 channels
Smart card
interface
Supported on all
channels
Supported
on SCI0
only
Supported on all
channels
No

769
Item
H8/3067, H8/3062
Series
H8/3048
Series
H8/3006, H8/3007
H8/3002
9
A/D
converter
Conversion start
trigger input
External trigger/8-bit
timer compare match
External
trigger
External trigger/8-bit
timer compare match
External
trigger
10
Pin
control
pin
/input port multiplexing
output
only
/input port multiplexing
output
only
A
20
in 16 MB
ROM enabled
expanded mode
A
20
/ I/O port multiplexing A
20
output
Address bus,
AS
,
RD
,
HWR
,
LWH
,
CS
7
to
CS
0
,
RFSH
in software
standby state
High-level output/high-
impedance selectable
(
RFSH
: H8/3067 only)
High-level
output
(except
CS
0
)
Low-level
output
(
CS
0
)
High-level output/high-
impedance selectable
High-level
output
(except
CS
0
)
Low-level
output
(
CS
0
)
CS
7
to
CS
0
in
bus-released
state
High-impedance
High-level
output
High-impedance
High-level
output
11
Flash
memory
functions
Program/erase
voltage
12 V application
unnecessary.
Single-power-supply
programming.
12 V
application
from off-chip
Block divisions
8 blocks
16 blocks
770
H.2
Comparison of Pin Functions of 100-Pin Package Products
(FP-100B, TFP-100B)
Table H.1
Pin Arrangement of Each Product (FP-100B, TFP-100B)
Pin
On-chip-ROM Products
ROMless Products
No.
H8/3067 Series H8/3062 Series H8/3048 Series H8/3042 Series
H8/3006, H8/3007 H8/3002
1
Vcc
Vcc
Vcc
Vcc
Vcc
Vcc
2
PB
0
/TP
8
/TMO
0
/
CS
7
PB
0
/TP
8
/TMO
0
/
CS
7
PB
0
/TP
8
/
TIOCA3
PB
0
/TP
8
/
TIOCA3
PB
0
/TP
8
/TMO
0
/
CS
7
PB
0
/TP
8
/
TIOCA3
3
PB
1
/TP
9
/TMIO
1
/
DREQ
0
/
CS
6
PB
1
/TP
9
/TMIO
1
/
CS
6
PB
1
/TP
9
/
TIOCB3
PB
1
/TP
9
/
TIOCB3
PB
1
/TP
9
/TMIO
1
/
DREQ
0
/
CS
6
PB
1
/TP
9
/
TIOCB3
4
PB
2
/TP
10
/TMO
2
/
CS
5
PB
2
/TP
10
/TMO
2
/
CS
5
PB
2
/TP
10
/
TIOCA4
PB
2
/TP
10
/
TIOCA4
PB
2
/TP
10
/TMO
2
/
CS
5
PB
2
/TP
10
/
TIOCA4
5
PB
3
/TP
11
/
TMIO
3
/
DREQ
1
/
CS
4
PB
3
/TP
11
/
TMIO
3
/
CS
4
PB
3
/TP
11
/
TIOCB4
PB
3
/TP
11
/
TIOC4
PB
3
/TP
11
/
TMIO
3
/
DREQ
1
/
CS
4
PB
3
/TP
11
/
TIOCB4
6
PB
4
/TP
12
/
UCAS
PB
4
/TP
12
PB
4
/TP
12
/
TOCXA4
PB
4
/TP
12
/
TOCXA4
PB
4
/TP
12
/
UCAS
PB
4
/TP
12
/
TOCXA4
7
PB
5
/TP
13
/
LCAS
/SCK
2
PB
5
/TP
13
PB
5
/TP
13
/
TOCXB4
PB
5
/TP
13
/
TOCXB4
PB
5
/TP
13
/
LCAS
/SCK
2
PB
5
/TP
13
/
TOCXB4
8
PB
6
/TP
14
/TxD
2
PB
6
/TP
14
PB
6
/TP
14
/
DREQ
0
/
CS
7
PB
6
/TP
14
/
DREQ
0
PB
6
/TP
14
/TxD
2
PB
6
/TP
14
/
DREQ
0
9
PB
7
/TP
15
/RxD
2
PB
7
/TP
15
PB
7
/TP
15
/
DREQ
1
/
ADTRG
PB
7
/TP
15
/
DREQ
1
/
ADTRG
PB
7
/TP
15
/RxD
2
PB
7
/TP
15
/
DREQ
1
/
ADTRG
10
RESO
/FWE*
RESO
/FWE*
RESO
/V
PP
*
RESO
RESO
RESO
11
Vss
Vss
Vss
Vss
Vss
Vss
12
P9
0
/TxD
0
P9
0
/TxD
0
P9
0
/TxD
0
P9
0
/TxD
0
P9
0
/TxD
0
P9
0
/TxD
0
13
P9
1
/TxD
1
P9
1
/TxD
1
P9
1
/TxD
1
P9
1
/TxD
1
P9
1
/TxD
1
P9
1
/TxD
1
14
P9
2
/RXD
0
P9
2
/RXD
0
P9
2
/RXD
0
P9
2
/RXD
0
P9
2
/RXD
0
P9
2
/RXD
0
15
P9
3
/RXD
1
P9
3
/RXD
1
P9
3
/RXD
1
P9
3
/RXD
1
P9
3
/RXD
1
P9
3
/RXD
1
16
P9
4
/SCK
0
/
IRQ
4
P9
4
/SCK
0
/
IRQ
4
P9
4
/SCK
0
/
IRQ
4
P9
4
/SCK
0
/
IRQ
4
P9
4
/SCK
0
/
IRQ
4
P9
4
/SCK
0
/
IRQ
4
17
P9
5
/SCK
1
/
IRQ
5
P9
5
/SCK
1
/
IRQ
5
P9
5
/SCK
1
/
IRQ
5
P9
5
/SCK
1
/
IRQ
5
P9
5
/SCK
1
/
IRQ
5
P9
5
/SCK
1
/
IRQ
5
18
P4
0
/D
0
P4
0
/D
0
P4
0
/D
0
P4
0
/D
0
P4
0
/D
0
P4
0
/D
0
19
P4
1
/D
1
P4
1
/D
1
P4
1
/D
1
P4
1
/D
1
P4
1
/D
1
P4
1
/D
1
20
P4
2
/D
2
P4
2
/D
2
P4
2
/D
2
P4
2
/D
2
P4
2
/D
2
P4
2
/D
2
21
P4
3
/D
3
P4
3
/D
3
P4
3
/D
3
P4
3
/D
3
P4
3
/D
3
P4
3
/D
3
22
Vss
Vss
Vss
Vss
Vss
Vss
23
P4
4
/D
4
P4
4
/D
4
P4
4
/D
4
P4
4
/D
4
P4
4
/D
4
P4
4
/D
4
24
P4
5
/D
5
P4
5
/D
5
P4
5
/D
5
P4
5
/D
5
P4
5
/D
5
P4
5
/D
5

771
Pin
On-chip-ROM Products
ROMless Products
No.
H8/3067 Series H8/3062 Series H8/3048 Series H8/3042 Series
H8/3006, H8/3007 H8/3002
25
P4
6
/D
6
P4
6
/D
6
P4
6
/D
6
P4
6
/D
6
P4
6
/D
6
P4
6
/D
6
26
P4
7
/D
7
P4
7
/D
7
P4
7
/D
7
P4
7
/D
7
P4
7
/D
7
P4
7
/D
7
27
P3
0
/D
8
P3
0
/D
8
P3
0
/D
8
P3
0
/D
8
D
8
D
8
28
P3
1
/D
9
P3
1
/D
9
P3
1
/D
9
P3
1
/D
9
D
9
D
9
29
P3
2
/D
10
P3
2
/D
10
P3
2
/D
10
P3
2
/D
10
D
10
D
10
30
P3
3
/D
11
P3
3
/D
11
P3
3
/D
11
P3
3
/D
11
D
11
D
11
31
P3
4
/D
12
P3
4
/D
12
P3
4
/D
12
P3
4
/D
12
D
12
D
12
32
P3
5
/D
13
P3
5
/D
13
P3
5
/D
13
P3
5
/D
13
D
13
D
13
33
P3
6
/D
14
P3
6
/D
14
P3
6
/D
14
P3
6
/D
14
D
14
D
14
34
P3
7
/D
15
P3
7
/D
15
P3
7
/D
15
P3
7
/D
15
D
15
D
15
35
Vcc
Vcc
Vcc
Vcc
Vcc
Vcc
36
P1
0
/A
0
P1
0
/A
0
P1
0
/A
0
P1
0
/A
0
A
0
A
0
37
P1
1
/A
1
P1
1
/A
1
P1
1
/A
1
P1
1
/A
1
A
1
A
1
38
P1
2
/A
2
P1
2
/A
2
P1
2
/A
2
P1
2
/A
2
A
2
A
2
39
P1
3
/A
3
P1
3
/A
3
P1
3
/A
3
P1
3
/A
3
A
3
A
3
40
P1
4
/A
4
P1
4
/A
4
P1
4
/A
4
P1
4
/A
4
A
4
A
4
41
P1
5
/A
5
P1
5
/A
5
P1
5
/A
5
P1
5
/A
5
A
5
A
5
42
P1
6
/A
6
P1
6
/A
6
P1
6
/A
6
P1
6
/A
6
A
6
A
6
43
P1
7
/A
7
P1
7
/A
7
P1
7
/A
7
P1
7
/A
7
A
7
A
7
44
Vss
Vss
Vss
Vss
Vss
Vss
45
P2
0
/A
8
P2
0
/A
8
P2
0
/A
8
P2
0
/A
8
A
8
A
8
46
P2
1
/A
9
P2
1
/A
9
P2
1
/A
9
P2
1
/A
9
A
9
A
9
47
P2
2
/A
10
P2
2
/A
10
P2
2
/A
10
P2
2
/A
10
A
10
A
10
48
P2
3
/A
11
P2
3
/A
11
P2
3
/A
11
P2
3
/A
11
A
11
A
11
49
P2
4
/A
12
P2
4
/A
12
P2
4
/A
12
P2
4
/A
12
A
12
A
12
50
P2
5
/A
13
P2
5
/A
13
P2
5
/A
13
P2
5
/A
13
A
13
A
13
51
P2
6
/A
14
P2
6
/A
14
P2
6
/A
14
P2
6
/A
14
A
14
A
14
52
P2
7
/A
15
P2
7
/A
15
P2
7
/A
15
P2
7
/A
15
A
15
A
15
53
P5
0
/A
16
P5
0
/A
16
P5
0
/A
16
P5
0
/A
16
A
16
A
16
54
P5
1
/A
17
P5
1
/A
17
P5
1
/A
17
P5
1
/A
17
A
17
A
17
55
P5
2
/A
18
P5
2
/A
18
P5
2
/A
18
P5
2
/A
18
A
18
A
18
56
P5
3
/A
19
P5
3
/A
19
P5
3
/A
19
P5
3
/A
19
A
19
A
19
772
Pin
On-chip-ROM Products
ROMless Products
No.
H8/3067 Series H8/3062 Series H8/3048 Series H8/3042 Series
H8/3006, H8/3007 H8/3002
57
Vss
Vss
Vss
Vss
Vss
Vss
58
P6
0
/
WAIT
P6
0
/
WAIT
P6
0
/
WAIT
P6
0
/
WAIT
P6
0
/
WAIT
P6
0
/
WAIT
59
P6
1
/
BREQ
P6
1
/
BREQ
P6
1
/
BREQ
P6
1
/
BREQ
P6
1
/
BREQ
P6
1
/
BREQ
60
P6
2
/
BACK
P6
2
/
BACK
P6
2
/
BACK
P6
2
/
BACK
P6
2
/
BACK
P6
2
/
BACK
61
P6
7
/
P6
7
/
P6
7
/
62
STBY
STBY
STBY
STBY
STBY
STBY
63
RES
RES
RES
RES
RES
RES
64
NMI
NMI
NMI
NMI
NMI
NMI
65
Vss
Vss
Vss
Vss
Vss
Vss
66
EXTAL
EXTAL
EXTAL
EXTAL
EXTAL
EXTAL
67
XTAL
XTAL
XTAL
XTAL
XTAL
XTAL
68
Vcc
Vcc
Vcc
Vcc
Vcc
Vcc
69
P6
3
/
AS
P6
3
/
AS
P6
3
/
AS
P6
3
/
AS
AS
AS
70
P6
4
/
RD
P6
4
/
RD
P6
4
/
RD
P6
4
/
RD
RD
RD
71
P6
5
/
HWR
P6
5
/
HWR
P6
5
/
HWR
P6
5
/
HWR
HWR
HWR
72
P6
6
/
LWR
P6
6
/
LWR
P6
6
/
LWR
P6
6
/
LWR
LWR
LWR
73
MD
0
MD
0
MD
0
MD
0
MD
0
MD
0
74
MD
1
MD
1
MD
1
MD
1
MD
1
MD
1
75
MD
2
MD
2
MD
2
MD
2
MD
2
MD
2
76
AVcc
AVcc
AVcc
AVcc
AVcc
AVcc
77
V
REF
V
REF
V
REF
V
REF
V
REF
V
REF
78
P7
0
/AN
0
P7
0
/AN
0
P7
0
/AN
0
P7
0
/AN
0
P7
0
/AN
0
P7
0
/AN
0
79
P7
1
/AN
1
P7
1
/AN
1
P7
1
/AN
1
P7
1
/AN
1
P7
1
/AN
1
P7
1
/AN
1
80
P7
2
/AN
2
P7
2
/AN
2
P7
2
/AN
2
P7
2
/AN
2
P7
2
/AN
2
P7
2
/AN
2
81
P7
3
/AN
3
P7
3
/AN
3
P7
3
/AN
3
P7
3
/AN
3
P7
3
/AN
3
P7
3
/AN
3
82
P7
4
/AN
4
P7
4
/AN
4
P7
4
/AN
4
P7
4
/AN
4
P7
4
/AN
4
P7
4
/AN
4
83
P7
5
/AN
5
P7
5
/AN
5
P7
5
/AN
5
P7
5
/AN
5
P7
5
/AN
5
P7
5
/AN
5
84
P7
6
/AN
6
/DA
0
P7
6
/AN
6
/DA
0
P7
6
/AN
6
/DA
0
P7
6
/AN
6
/DA
0
P7
6
/AN
6
/DA
0
P7
6
/AN
6
85
P7
7
/AN
7
/DA
1
P7
7
/AN
7
/DA
1
P7
7
/AN
7
/DA
1
P7
7
/AN
7
/DA
1
P7
7
/AN
7
/DA
1
P7
7
/AN
7
86
AVss
AVss
AVss
AVss
AVss
AVss
87
P8
0
/
RFSH
/
IRQ
0
P8
0
/
IRQ
0
P8
0
/
RFSH
/
IRQ
0
P8
0
/
RFSH
/
IRQ
0
P8
0
/
RFSH
/
IRQ
0
P8
0
/
RFSH
/
IRQ
0
88
P8
1
/
CS
3
/
IRQ
1
P8
1
/
CS
3
/
IRQ
1
P8
1
/
CS
3
/
IRQ
1
P8
1
/
CS
3
/
IRQ
1
P8
1
/
CS
3
/
IRQ
1
P8
1
/
CS
3
/
IRQ
1
773
Pin
On-chip-ROM Products
ROMless Products
No.
H8/3067 Series H8/3062 Series H8/3048 Series H8/3042 Series
H8/3006, H8/3007 H8/3002
89
P8
2
/
CS
2
/
IRQ
2
P8
2
/
CS
2
/
IRQ
2
P8
2
/
CS
2
/
IRQ
2
P8
2
/
CS
2
/
IRQ
2
P8
2
/
CS
2
/
IRQ
2
P8
2
/
CS
2
/
IRQ
2
90
P8
3
/
CS
1
/
IRQ
3
/
ADTRG
P8
3
/
CS
1
/
IRQ
3
/
ADTRG
P8
3
/
CS
1
/
IRQ
3
P8
3
/
CS
1
/
IRQ
3
P8
3
/
CS
1
/
IRQ
3
/
ADTRG
P8
3
/
CS
1
/
IRQ
3
91
P8
4
/
CS
0
P8
4
/
CS
0
P8
4
/
CS
0
P8
4
/
CS
0
P8
4
/
CS
0
P8
4
/
CS
0
92
Vss
Vss
Vss
Vss
Vss
Vss
93
PA
0
/TP
0
/
TEND
0
/TCLKA
PA
0
/TP
0
/TCLKA PA
0
/TP
0
/
TEND
0
/TCLKA
PA
0
/TP
0
/
TEND
0
/TCLKA
PA
0
/TP
0
/
TEND
0
/TCLKA
PA
0
/TP
0
/
TEND
0
/TCLKA
94
PA
1
/TP
1
/
TEND
1
/TCLKB
PA
1
/TP
1
/TCLKB PA
1
/TP
1
/
TEND
1
/TCLKB
PA
1
/TP
1
/
TEND
1
/TCLKB
PA
1
/TP
1
/
TEND
1
/TCLKB
PA
1
/TP
1
/
TEND
1
/TCLKB
95
PA
2
/TP
2
/
TIOCA
0
/TCLKC
PA
2
/TP
2
/
TIOCA
0
/TCLKC
PA
2
/TP
2
/
TIOCA
0
/TCLKC
PA
2
/TP
2
/
TIOCA
0
/TCLKC
PA
2
/TP
2
/
TIOCA
0
/TCLKC
PA
2
/TP
2
/
TIOCA
0
/TCLKC
96
PA
3
/TP
3
/
TIOCB
0
/TCLKD
PA
3
/TP
3
/
TIOCB
0
/TCLKD
PA
3
/TP
3
/
TIOCB
0
/TCLKD
PA
3
/TP
3
/
TIOCB
0
/TCLKD
PA
3
/TP
3
/
TIOCB
0
/TCLKD
PA
3
/TP
3
/
TIOCB
0
/TCLKD
97
PA
4
/TP
4
/
TIOCA
1
/A
23
PA
4
/TP
4
/
TIOCA
1
/A
23
PA
4
/TP
4
/
TIOCA
1
/
CS
6
/A
23
PA
4
/TP
4
/
TIOCA
1
/A
23
PA
4
/TP
4
/
TIOCA
1
/A
23
PA
4
/TP
4
/
TIOCA
1
/A
23
98
PA
5
/TP
5
/
TIOCB
1
/A
22
PA
5
/TP
5
/
TIOCB
1
/A
22
PA
5
/TP
5
/
TIOCB
1
/
CS
5
/A
22
PA
5
/TP
5
/
TIOCB
1
/A
22
PA
5
/TP
5
/
TIOCB
1
/A
22
PA
5
/TP
5
/
TIOCB
1
/A
22
99
PA
6
/TP
6
/
TIOCA
2
/A
21
PA
6
/TP
6
/
TIOCA
2
/A
21
PA
6
/TP
6
/
TIOCA
2
/
CS
4
/A
21
PA
6
/TP
6
/
TIOCA
2
/A
21
PA
6
/TP
6
/
TIOCA
2
/A
21
PA
6
/TP
6
/
TIOCA
2
/A
21
100
PA
7
/TP
7
/
TIOCB
2
/A
20
PA
7
/TP
7
/
TIOCB
2
/A
20
PA
7
/TP
7
/
TIOCB
2
/A
20
PA
7
/TP
7
/
TIOCB
2
/A
20
PA
7
/TP
7
/
TIOCB
2
/A
20
PA
7
/TP
7
/
TIOCB
2
/A
20
Note: * Functions as
RESO
in the mask ROM versions, and as FWE in the flash memory and flash
memory R versions.
H8/3006, H8/3007 Hardware Manual
Publication Date: 1st Edition, December 1997
4th Edition, January 2000
Published by:
Electronic Devices Sales & Marketing Group
Semiconductor & Integrated Circuits
Hitachi, Ltd.
Edited by:
Technical Documentation Group
Hitachi Kodaira Semiconductor Co., Ltd.
Copyright © Hitachi, Ltd., 1997. All rights reserved. Printed in Japan.