
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
INTRODUCTION
As a pre-signal & servo signal processor for the DISC-MAN, S1L9226X is a
low voltage, low consumption current IC that can read CD-RW, and CD-R
discs and can be applied to various products, such as the CDP/VCD/CD-
MP3 for the DISC-MAN. It is a hard-wired free-adjustment servo, which
automatically controlled the control point of the pre-signal portion.
FEATURES
∑
RF amplifier (CD, CD-R, CD-RW applicable)
∑
Gain setting & monitoring for the CD-R, CD-RW DISC
∑
RFAMP offset adjustment
∑
Focus error amp & Febias adjustment
∑
Tracking error amp & balance, gain adjustment
∑
FOK, defect, mirror detect
∑
Center voltage amplifier
∑
APC (Automatic Power Control)
∑
RF AGC & EQ control (AGC Level Control Compatible)
∑
Enhanced EFM slice (Double Asymmetry Method)
∑
Focus servo loop & offset adjustment
∑
Tracking servo loop & offset adjustment
∑
Sled servo loop
∑
Spindle servo loop
∑
Auto-sequence
∑
Fast search mode (1 - 36000 track jump)
∑
Interruption countermeasure
∑
Focus & Tracking servo muting controlled by EFM duty check
∑
RF peaking prevention system by EFM duty check
∑
Focus, tracking, spindle loop pole move option
∑
Operating voltage 2.7V
3.3V
∑
Power saving mode
<Notice> LPC Control used by side beam signal, it related to pick-up assurance.
When used pick-up, the specification is present extra.
ORDERING INFORMATION
Device
Package
Supply Voltage
Operating Temperature
S1L9226X01
Q0R0
48-LQFP-0707
2.7V
3.3V
-20
∞
C
+75
∞
C
48-LQFP-0707
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
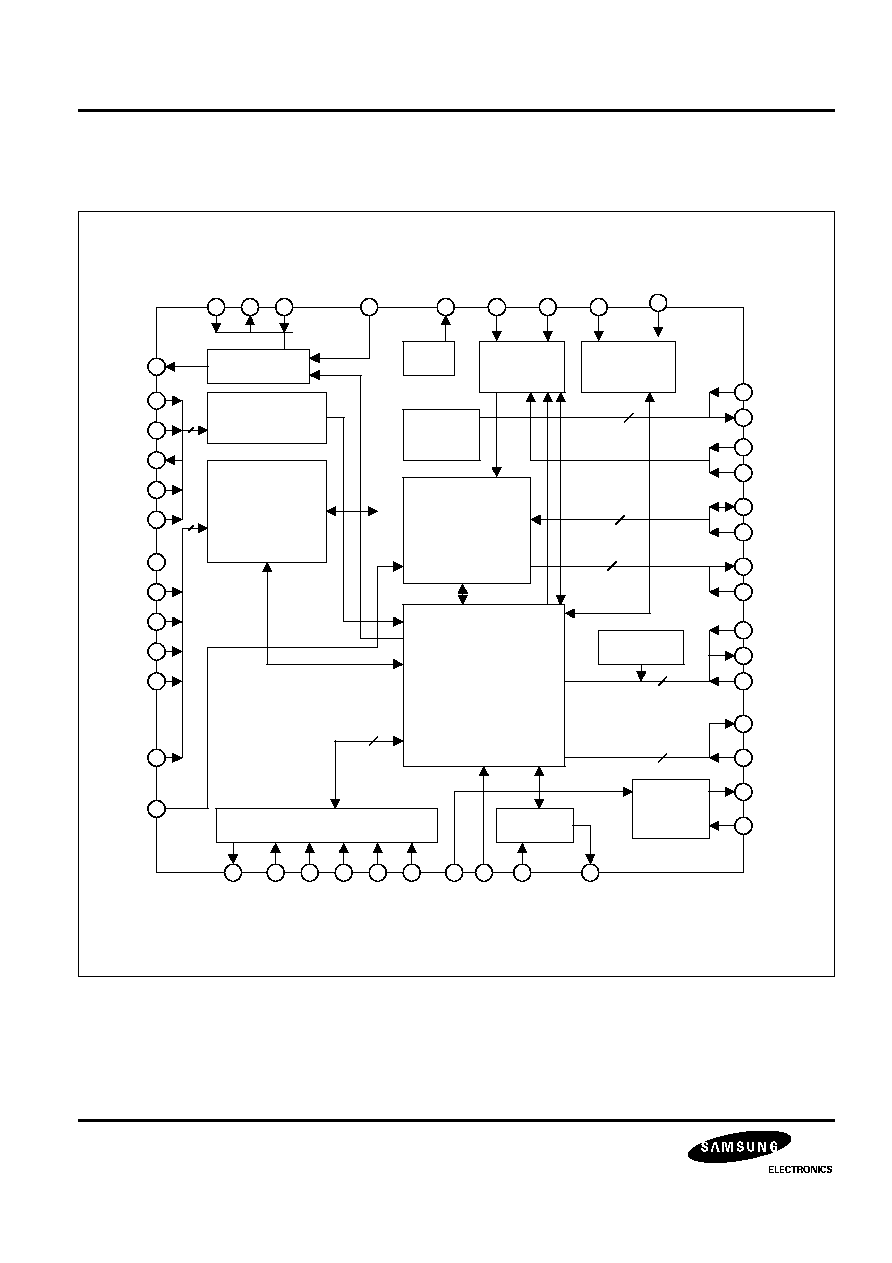
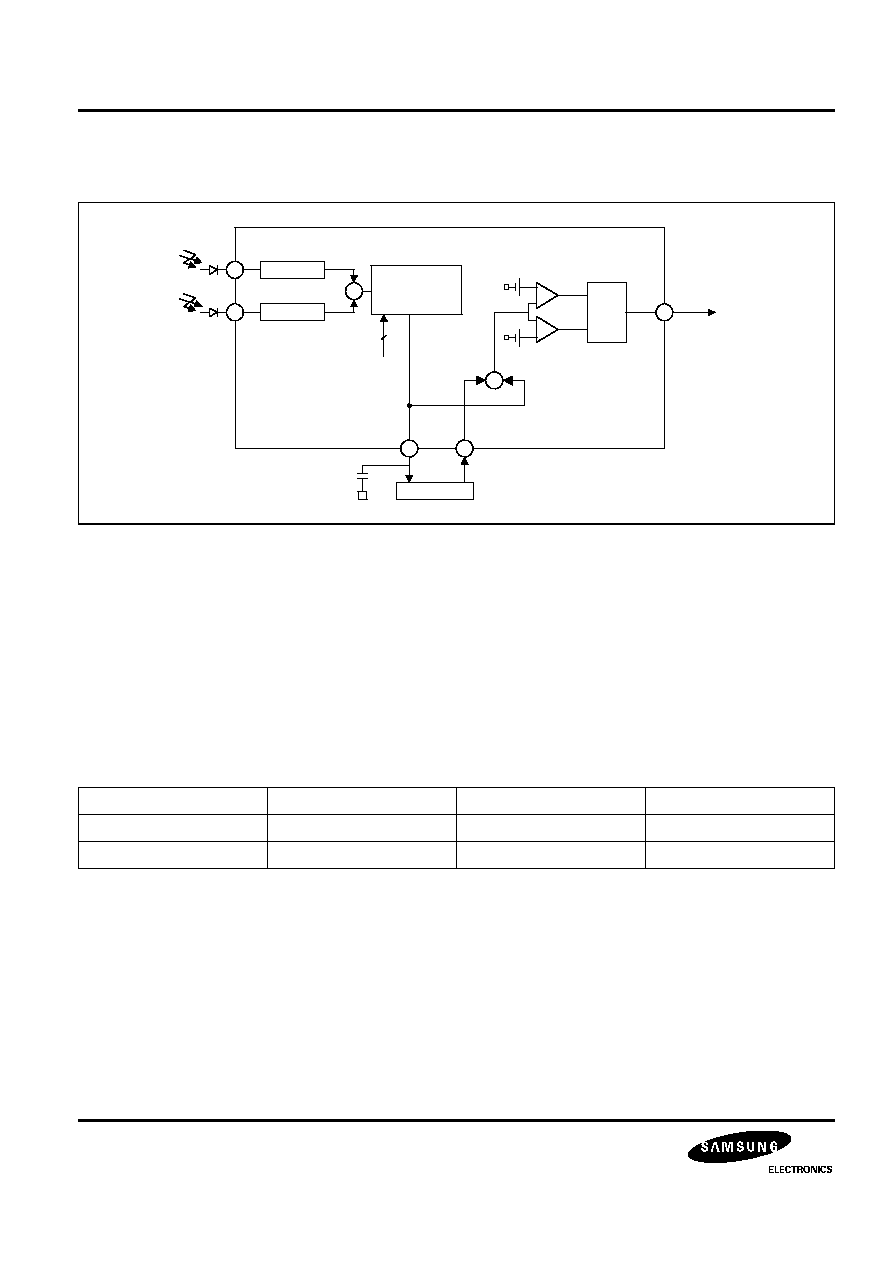
BLOCK DIAGRAM
4
12
RF AGC & EQ
Control
Focus OK Detect
Defect Detect Mirror
Gen
Center
Voltage
APC. Laser
Control &
LPC
Tracking Servo Loop
- Gain & Phase
Compensation
- Track Jump
- Offset Adjust
- TZC Gen.
Tracking Error
(RW)
I/V AMP
RF & Focus
Error (CD-RW)
I/V AMP
Hardware Logic
- Auto-Sequencer
- Fast Search
- Febias, Focus Servo,
Tracking Offset ADJ.
- Tracking Balance & Gain
Adjust
- Interruption Detect
- EFM Muting System
Sled Servo &
Kick Gen
Spindle
Servo LPF
EFM
Comparator
Micom Data Interface Logic Decoder
Focus Servo Loop
- Gain & Phase
Compensation
- Focus Search
- Offset Adjust
- FZC Gen.
EQO
PD
LD
LPFT
TEIO
TZC&
SSTOP
ATSC
TEO
TEM
SLP
SLO
SLM
FEO
FEM
SPDLO
SPDLM
EQI
RFO
RFM
EQC
VREF
PDE
PDF
PDBD
PDAC
ISTAT
MCK
MDATA
MLT
RESET
WDCK
CLVI
LOCK
ASY
EFM
5
45
46
44
43
6
7
8
9
10
11
14
13
15
16
17
19
18
20
22
21
24
23
30
29
25
26
27
28
29
36
33
34
35
37
38
39
41
40
42
47
48
1
2
3
EFMI
DCCI
DCC0
MCP
DCB
VCC/
VDD
FRSH
FSET
FLB
FGD
FSI
TGU

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
APPLICATION DIAGRAM
S1L9226X
To Micom
From Micom
TEO
TEM
SLP
SLO
SLM
ISTAT
MCK
MDATA
MLT
RESET
WDCK
CLVI
LOCK
ASY
EFM
SPM
EFMI
VCC
FRSH
FSET
FLB
FGD
FSI
TGU
EQO
EQI
RFO
RFM
PD
LD
37
38
39
40
41
42
43
44
45
46
47
48
24
23
22
21
20
19
18
17
16
15
14
13
1
2
3
4
5
6
7
8
9
10
11
12
36
35
34
33
32
31
30
29
28
27
26
25
Pick-up
LD
PD
A
C
B
D
F
E
VR
VCC
GND
55k
55k
55k
55k
82k
82k
103
103
333
683
33
µ
F
2pF
22k
682
821
47
µ
F
430k
104
104
102
104
10k
From Micom
From Micom
From Micom
474
333
SMEF
8.2k
20k
SMDS
SMDP
10k
From DSP
From DSP
to DSP
474
103
10k
100k
88k
103
22k
683
47k
10
µ
F
120k
39k 104
100k
120k
391
222
from pick-up
150k
104
333
100k
104
47
µ
F
220
100
µ
F
SPO
FEM
FEO
GND
TZC/SSTOP
TEIO
LPFT
ATSC
PDAC
PDF
PDBD
PDE
DCB
MCP
DCCI
DCCO
VREF
EQC
272
10k
1M
104
2pF

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
PIN CONFIGURATION
S1L9226X
TEO
TEM
SLP
SLO
SLM
ISTAT
MCK
MDATA
MLT
RESET
WDCK
CLVI
LOCK
ASY
EFM
SPM
EFMI
VCC
FRSH
FSET
FLB
FGD
FSI
TGU
EQO
EQI
RFO
RFM
PD
LD
37
38
39
40
41
42
43
44
45
46
47
48
24
23
22
21
20
19
18
17
16
15
14
13
1
2
3
4
5
6
7
8
9
10
11
12
36
35
34
33
32
31
30
29
28
27
26
25
SPO
FEM
FEO
GND
TZC/SSTOP
TEIO
LPFT
ATSC
PDAC
PDF
PDBD
PDE
DCB
MCP
DCCI
DCCO
VREF
EQC
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
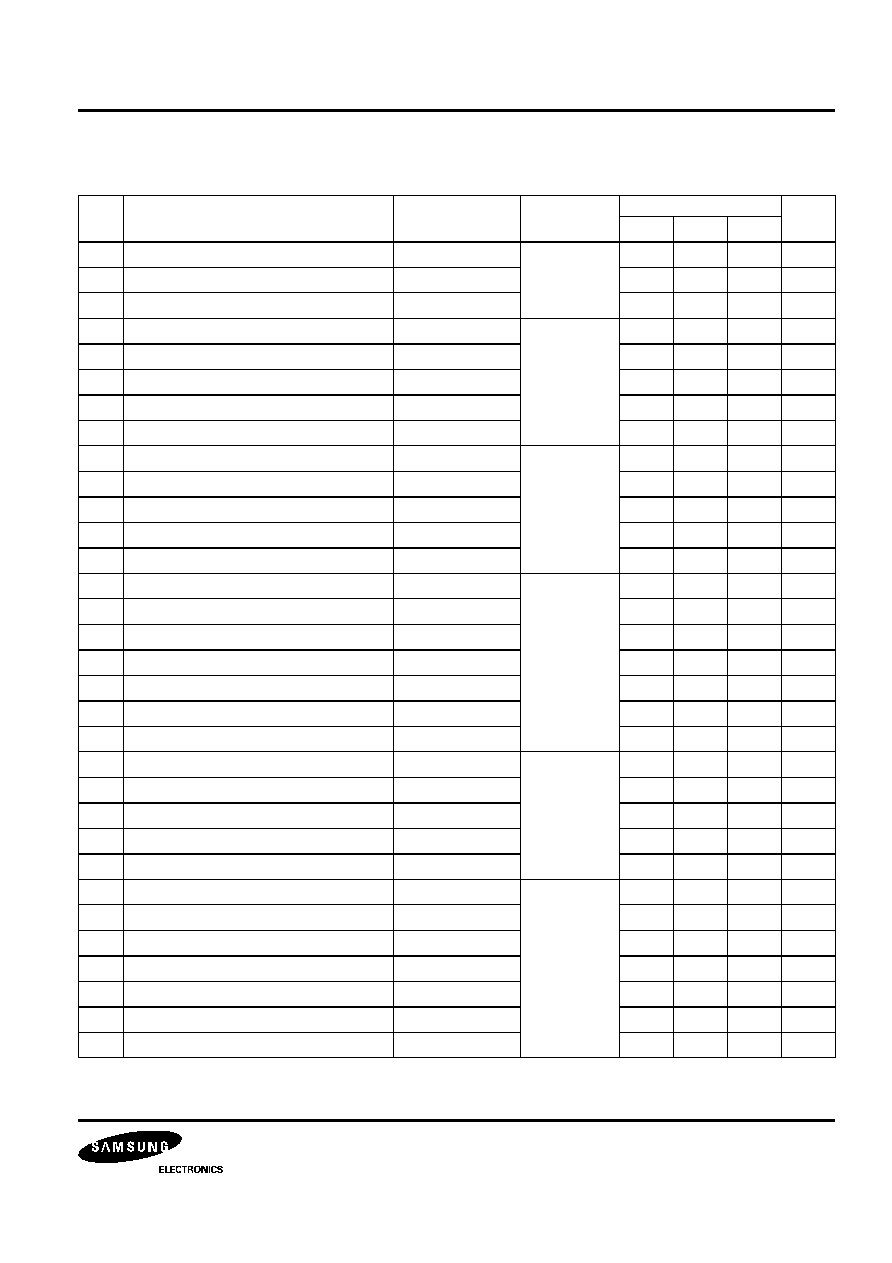
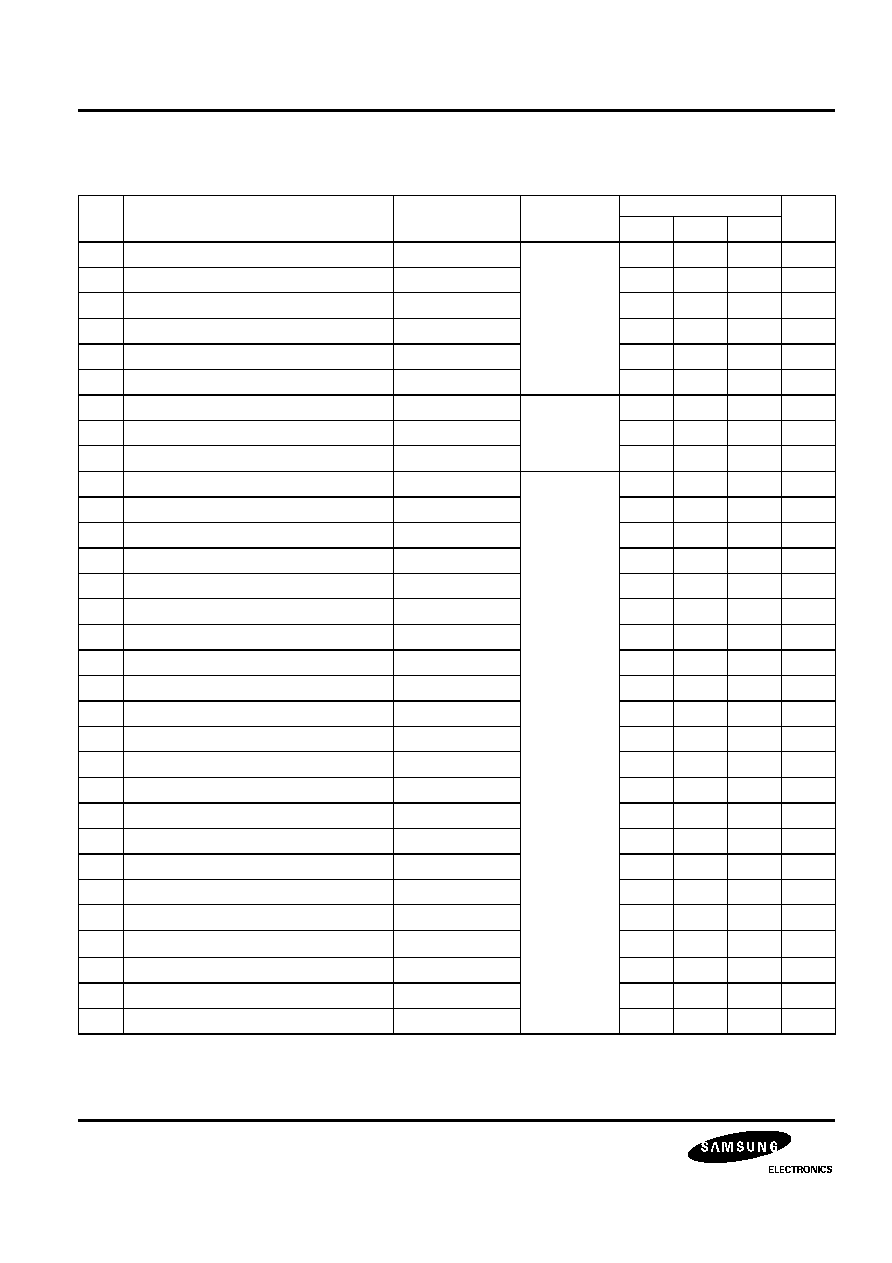
PIN DESCRIPTION
Table 1. Pin Description
Pin No.
Symbol
I/O
Description
1
RFM
I
RF summing amp. inverting input
2
RFO
O
RF summing amp. output
3
EQI
I
RFO DC eliminating input(use by MIRROR, FOK ,AGC & EQ terminal)
4
EQO
O
RF equalizer output
5
EFMI
I
EFM slice input. (input impedance 47K)
6
VCC
P
Main power supply
7
FRSH
I
Capcitor connection to focus search
8
FSET
I
Filter bias for focus,tracking,spindle
9
FLB
I
Capacitor connection to make focus loop rising band
10
FGD
I
Terminal to change the hign frequency gain of focus loop
11
FSI
I
Focus servo input
12
TGU
I
Connect the component to change the high frequency of tracking Loop
13
ISTAT
O
Internal status output
14
MCK
I
Micom clock
15
MDATA
I
Data input
16
MLT
I
Data latch input
17
RESET
I
Reset input
18
CLVI
I
Input the spindle control output from DSP
19
WDCK
I
88.2KHz input terminal from DSP
20
LOCK
I
Sled run away inhibit pin (L: sled off & tracking gain up)
21
EFM
O
EFM output for RFO slice(to DSP)
22
ASY
I
Auto asymmetry control input
23
SPM
I
Spindle amp. inverting input
24
SPO
O
Spindle amp. output
25
SLM
I
Sled servo inverting input
26
SLO
O
Sled servo output
27
SLP
I
Sled servo noninverting input
28
TEM
I
Tracking servo amp.inverting input
29
TEO
O
Tracking servo amp. output
30
FEM
I
Focus servo amp. inverting input
31
FEO
O
Focus servo amp. output pin

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
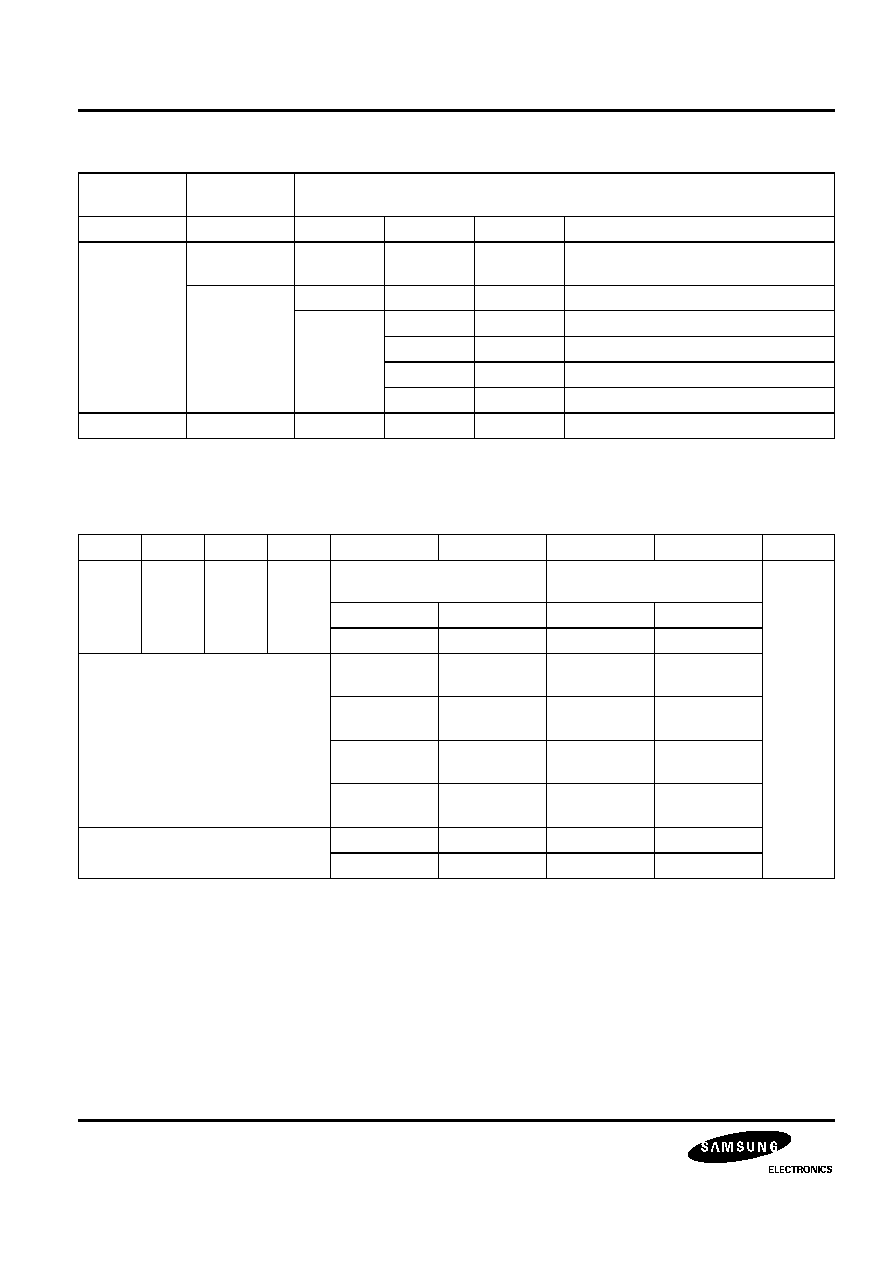
MAXIMUM ABSOLUTE RATINGS
32
GND
P
Main ground
33
TZC/
SSTOP
I
Tracking zero crossing input & Check the position of pick-up
wherther inside or
not
34
TEIO
B
Tracking error output & Tracking servo input
35
LPFT
I
Tracking error integration input (to automatic control)
36
ATSC
I
Anti-shock input
37
LD
O
APC amp. output
38
PD
I
APC amp. input
39
PDAC
I
Photo diode A & C RF I/V amp. inverting input
40
PDBD
I
Photo diode B & D RF I/V amp. inverting input
41
PDF
I
Photo diode F & tracking(F) I/V amp. inverting input
42
PDE
I
Photo diode E & tracking(E) I/V amp. inverting input
43
DCB
I
Capacitor connection to limit the defect detection
44
MCP
I
Capacitor connection to mirror hold
45
DCCI
O
Output pin to connect the component for defect detect
46
DCCO
I
Input pin to connect the component for defect detect
47
VREF
O
(VCC+GND)/2 Voltage reference output
48
EQC
I
AGC_equalize level control terminal & capacitor terminal to input in to VCA
Item
Symbol
Rating
Unit
Power supply voltage
V
DD
2.7
3.3
V
Absolute Ratings
V
I
4.5
V
Operating temperature
T
OPR
-20
75
∞
C
Storage temperature
T
STG
-40
125
∞
C
Table 1. Pin Description (Continued)
Pin No.
Symbol
I/O
Description
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
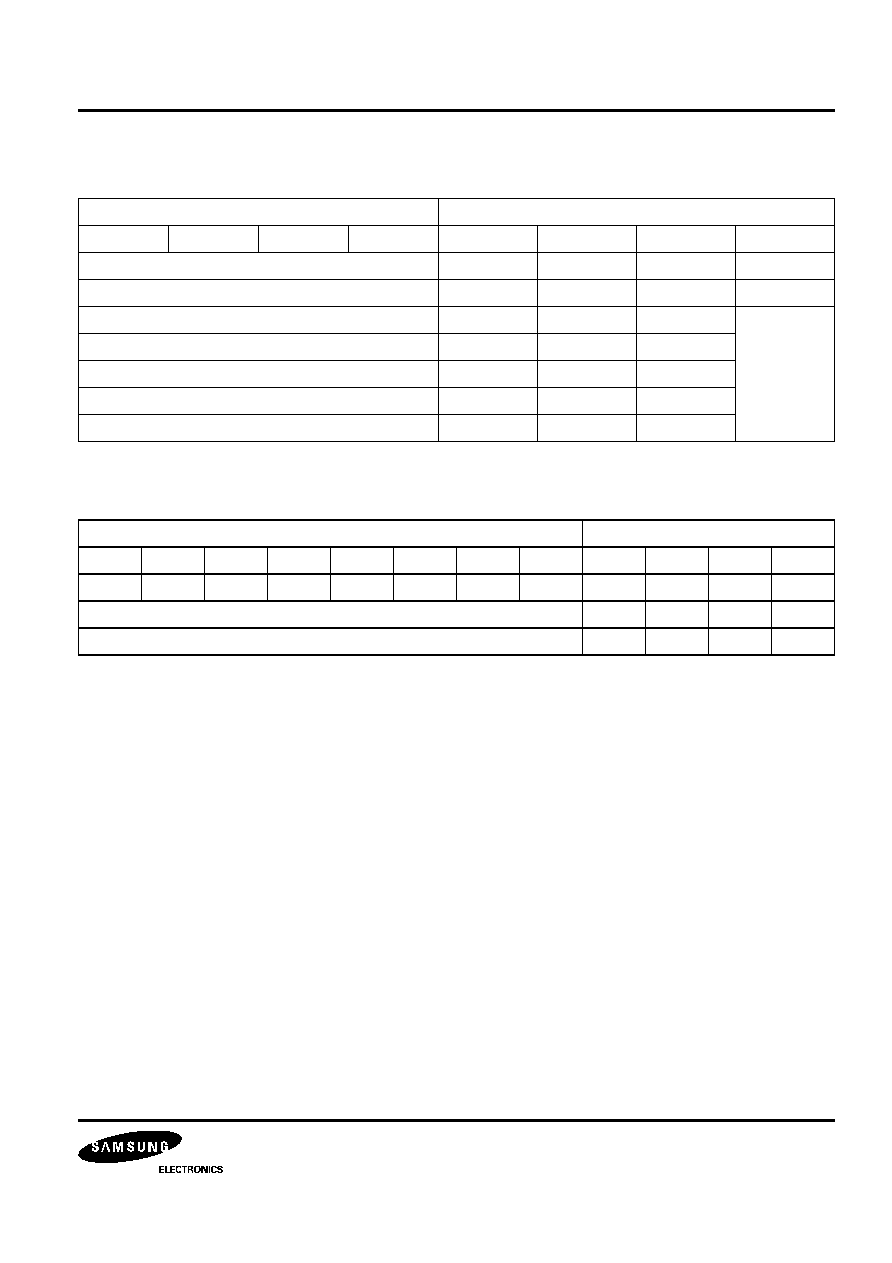
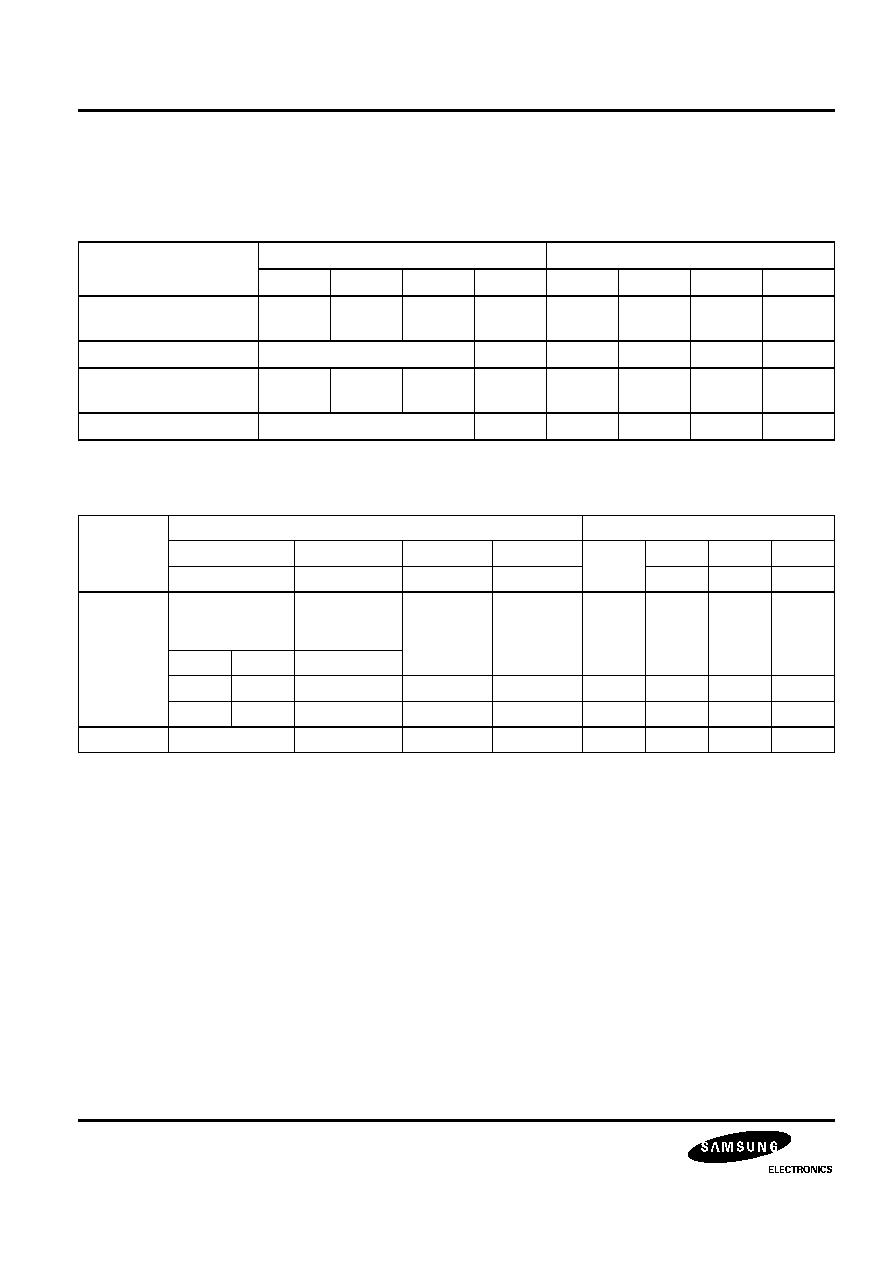
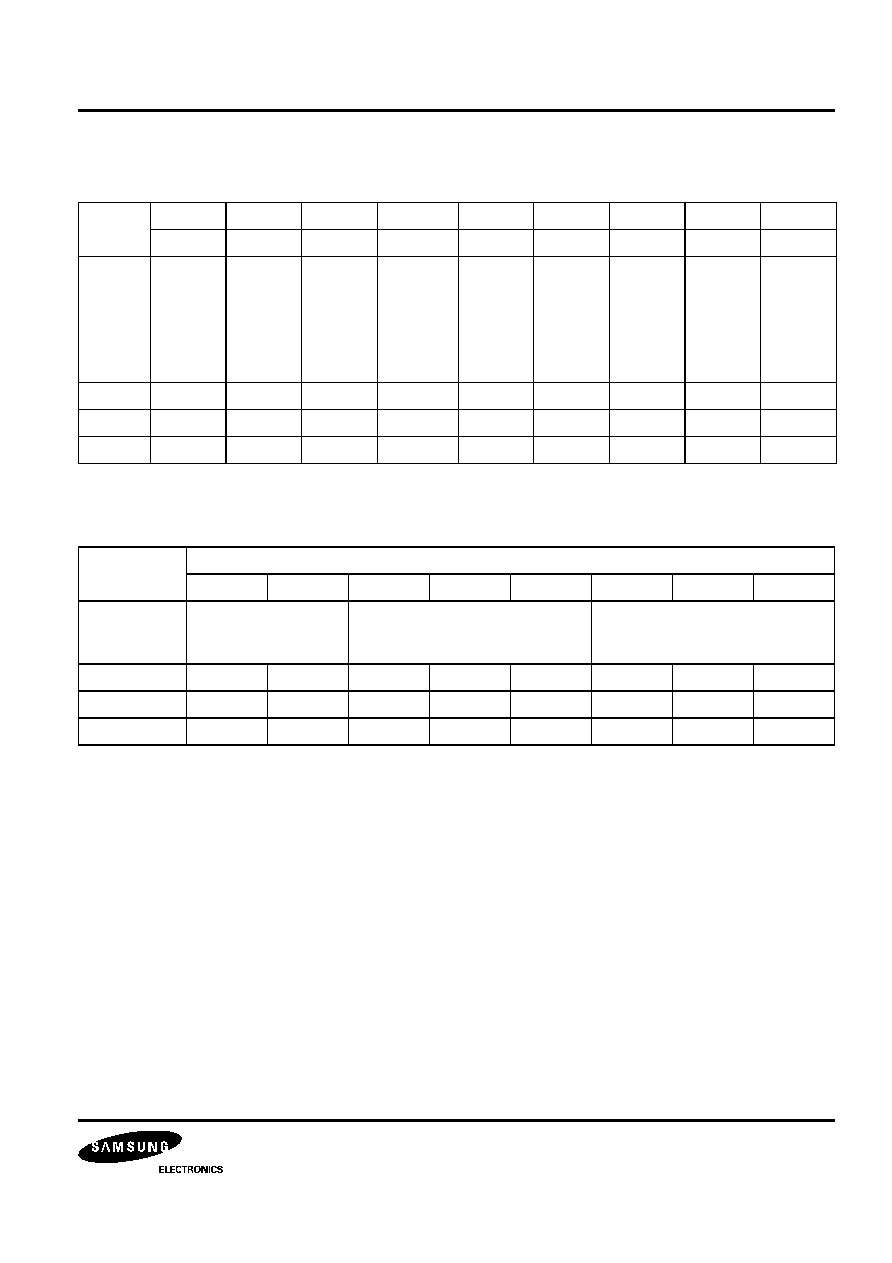
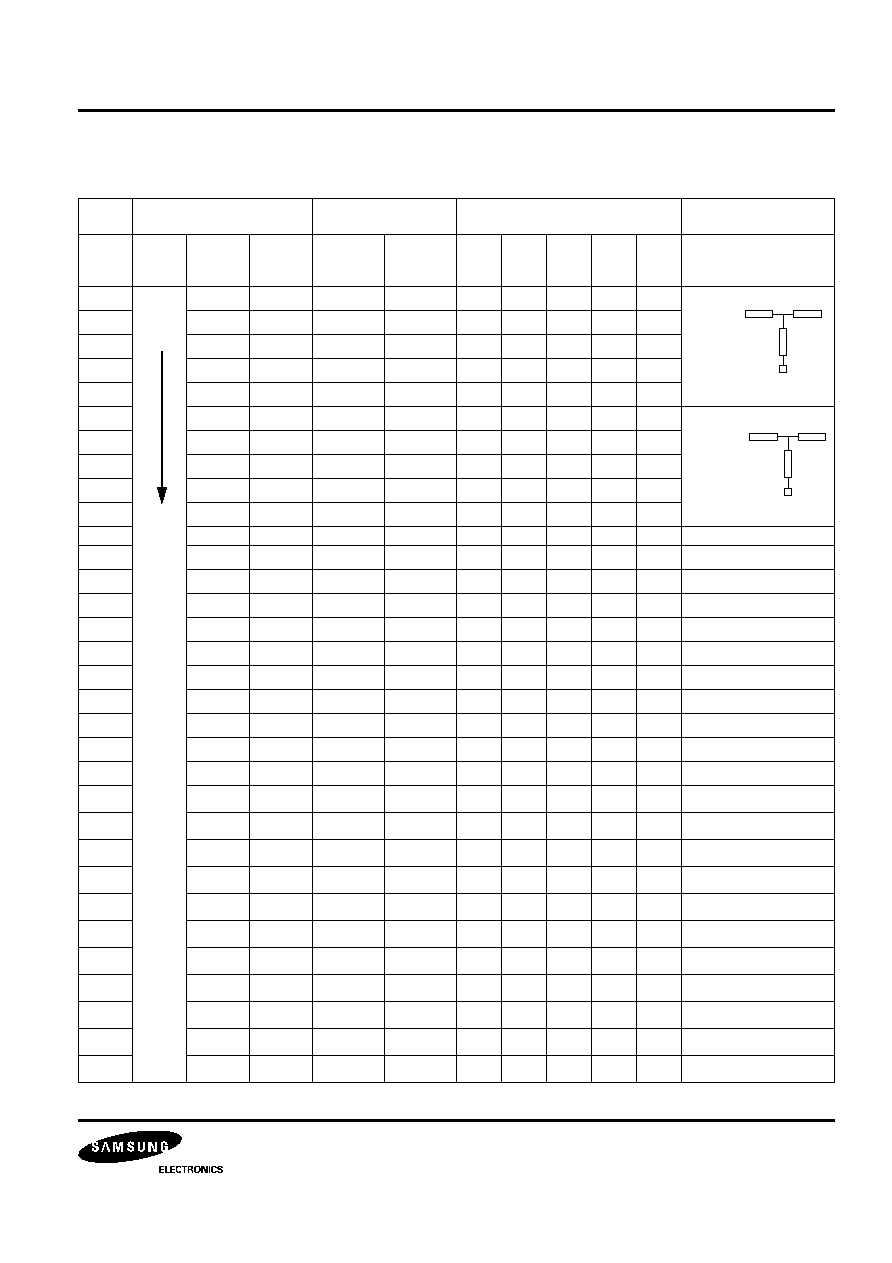
ELECTRICAL CHARACTERISTICS
Table 2. Electrical Characteristics
No.
Characteristics
Symbols
Test Block
Spec
Unit
Min.
Typ.
Max.
1
Supply current 2.7V
ICCTY
5
10
20
mA
2
RF AMP offset voltage
Vrfo
RF AMP
-100
0
100
mV
3
RF AMP offset voltage 2
Vrfo2
-300
-200
-100
mV
4
RF AMP oscillation voltage
Vrfosc
0
50
100
mV
5
RF AMP voltage gain AC
Grf
15.5
18.5
23.5
dB
6
RF THD characteristic
Rfthd
-
-
5
%
7
RF AMP maximum output voltage
Vrfh
2.35
-
-
V
8
RF AMP minimum output voltage
Vrfl
-
-
0.85
V
9
RF CDRW gain AC1
GRWAC1
1.05
1.30
1.55
-
10
RF CDRW gain AC2
GRWAC2
1.05
1.30
1.55
-
11
RF CDRW gain AC3
GRWAC3
1.05
1.30
1.55
-
12
Focus error offset voltage
VFEO1
Focus Error
-525
-250
0
mV
13
Focus error auto voltage
VFEO2
-50
0
50
mV
14
ISTAT state after FEBIAS control
VISTAT1
2.2
-
-
V
15
Focus positive offset 1
Vfep1
0
40
80
mV
16
Focus positive offset 2
Vfep2
10
60
100
mV
17
Focus positive offset 3
Vfep3
50
120
180
mV
18
Focus negative offset 1
Vfen1
-80
-40
0
mV
19
Focus negative offset 2
Vfen2
-100
-60
-10
mV
20
Focus negative offset 3
Vfen3
-180
-120
-50
mV
21
Focus Error voltage gain 1
GFEAC
19
23
27
dB
22
Focus Error voltage gain 2
GFEBD
19
23
27
dB
23
Focus Error voltage gain difference
GFE
-3
0
3
dB
24
Focus Error RW down
GFERWD
0.4
0.7
1.0
-
25
Focus Error AC difference
VFEACP
0
50
100
mV
26
FERR maximum output voltage H
VFEPPH
2.3
-
-
V
27
FERR minimum output voltage L
VFEPPL
-
-
0.4
V
28
AGC max gain
GAGC
AGC_EQ
15
19
22
dB
29
AGC EQ gain
GEQ
-3
1
2.5
dB
30
AGC normal gain
GAGC2
3
6
9
dB
31
AGC compress ratio
CAGC
0
2.5
5
dB
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Table 2. Electrical Characteristics (Continued)
No.
Characteristics
Symbols
Test Block
Spec
Unit
Min.
Typ.
Max.
32
AGC frequency
FAGC
AGC_EQ
-5.0
0
2.5
dB
33
AGC Level control
AGCL
0.95
1.125
1.25
-
34
AGC RF Sel
AGCS
15.5
19.5
23.5
dB
35
TERR gain voltage gain 1
GTEF1
Tracking Error
4.5
7.5
10.5
dB
36
TERR gain voltage gain 2
GTEF2
0.98
2.25
4.5
-
37
TERR gain voltage gain 3
GTEF3
0.98
1.3
1.6
-
38
TERR gain voltage gain 4
GTEF4
0.95
1.15
1.30
-
39
TERR gain voltage gain 5
GTEF5
0.90
1.075
1.15
-
40
TERR gain voltage gain 6
GTEF6
0.98
1.15
1.30
-
41
TERR gain voltage gain 7
GTEF7
0.98
1.35
1.70
-
42
TERR balance gain
GTEE
10.5
13.5
16.5
dB
43
TERR balance mode 1
TBE1
0.95
1.05
1.12
-
44
TERR balance mode 2
TBE2
0.95
1.05
1.12
-
45
TERR balance mode 3
TBE3
0.95
1.05
1.12
-
46
TERR balance mode 4
TBE4
1.0
1.25
1.5
-
47
TERR balance mode 5
TBE5
1.0
1.20
1.4
-
48
TERR balance mode 6
TBE6
1.0
1.3
1.75
-
49
TERR maximum output voltage H
VTPPH
1.9
-
-
V
50
TERR minimum output voltage L
VTPPL
-
-
0.8
V
51
TERR RW F gain 1
GRWTF1
1.05
1.75
2.50
-
52
TERR RW F gain 2
GRWTF2
1.05
1.35
1.80
-
53
TERR RW F gain 3
GRWTF3
1.00
1.30
1.65
-
54
TERR RW E gain 1
GRWTE1
1.05
1.35
1.65
-
55
TERR RW E gain 2
GRWTE2
1.05
1.35
2.00
-
56
TERR RW E gain 3
GRWTE3
1.00
1.30
1.65
-
57
APC PSUB voltage L
APSL
APC
-
-
1.0
V
58
APC PSUB voltage H
APSH
&
1.8
-
-
V
59
APC PSUB LDOFF
APSLOF
Laser
2.4
-
-
V
60
APC current drive H
ACDH
Control
1.35
-
-
V
61
APC current drive L
ACDL
-
-
1.35
V
62
MIRROR minimum operating frequency
FMIRB
MIRROR
-
550
900
HZ
63
MIRROR maximum operating frequency
FMIRP
30
75
-
kHz
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Table 2. Electrical Characteristics (Continued)
No.
Characteristics
Symbols
Test Block
Spec
Unit
Min.
Typ.
Max.
64
MIRROR AM characteristic
FMIRA
MIRROR
-
400
600
HZ
65
MIRROR minimum input voltage
VMIRL
-
0.1
0.2
V
66
MIRROR gain option 1
MIRRO1
10
-
-
kHz
67
FOK threshold voltage
VFOKT
FOK
-450
-360
-300
mV
68
FOK threshold voltage 2
VFOKT2
-450
-560
-220
mV
69
FOK output voltage H
VFOHH
2.2
-
-
V
70
FOK output voltage L
VFOKL
-
-
0.5
V
71
FOK FEEQ. characteristic
FFOK
40
45
50
kHz
72
Defect bottom voltage
FDFCTB
Defect
-
670
1000
HZ
73
Defect CUTOFF voltage
FDFCTC
2.0
4.7
-
kHz
74
Defect minimum input voltage
VDFCTL
-
0.3
0.5
V
75
Defect maximum input voltage
VDFCTH
1.8
-
-
V
76
Defect option gain
FDFCTG
-
670
1000
Hz
77
Normal EFM duty voltage 1
NDEFMN
EFM Slice
-50
0
50
mV
78
Normal EFM duty symmetry
NDEFMA
45
50
55
%
79
Normal EFM duty voltage 3
NDEFMH
0
50
100
mV
80
Normal EFM duty voltage 4
NDEFML
-100
-50
0
mV
81
Normal EFM minimum input voltage
NDEFMV
-
-
0.12
V
82
Normal EFM duty
difference 1
NDEFM1
20
50
80
mV
83
Normal EFM duty
difference
2
NDEFM2
20
50
80
mV
84
EFM2 duty voltage 1
EDEFMN1
Enhanced
-50
0
50
mV
85
EFM2 duty symmetry
EDEFMA
EFM Slicer
45
50
55
%
86
Double ASY voltage 1
DEFM1
-375
-250
-125
mV
87
Double ASY voltage 2
DEFM2
125
250
375
mV
88
EFM2 minimum input voltage
EDEFMV
-
-
0.12
V
89
FZC threshold voltage
VFZC
Interface
30
69
105
mV
90
ANTI-shock detection H
VATSCH
20
60
100
mV
91
ANTI-shock detection L
VATSCL
-100
-60
-20
mV
92
TZC threshold voltage
VTZC
-150
0
150
mV
93
SSTOP threshold voltage
VSSTOP
-155
-90
-5
mV
94
Tracking gain win T1
VTGWT1
190
250
310
mV
95
Tracking gain win T2
VTGWT2
90
150
210
mV
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Table 2. Electrical Characteristics (Continued)
No.
Characteristics
Symbols
Test Block
Spec
Unit
Min.
Typ.
Max.
96
Tracking gain win T3
VTGWT3
Interface
240
300
360
mV
97
Tracking gain win T4
VTGWT4
140
200
260
mV
98
Tracking gain win T5
VTGWT5
440
500
560
mV
99
Tracking gain win T6
VTGWT6
340
400
460
mV
100
Tracking BAL win T1
VTBWT1
-50
0
50
mV
101
Tracking BAL win T2
VTBWT2
-50
0
50
mV
102
Reference voltage
VREF
VREF
-100
0
100
mV
103
Reference current H
IREFH
-100
0
100
mV
104
Reference current L
IREFL
-100
0
100
mV
105
F. Servo off offset
VOSF1
Focus Servo
-100
0
100
mV
106
F. Servo DAC on offset
VOSF2
0
250
550
mV
107
F. Servo auto offset
VAOF
-65
0
65
mV
108
F. Servo auto ISTAT
VISTAT2
2.2
-
-
V
109
FERR FEBIAS status
VFEBIAS
-50
0
50
mV
110
F. Servo loop gain
GF
17
21.5
24
dB
111
F. Servo output voltage H
VFOH
2.2
-
-
V
112
F. Servo output voltage L
VFOL
-
-
0.5
V
113
F. Servo oscillation voltage
VFOSC
0
100
200
mV
114
F. Servo feed through
GFF
-
-
-35
dB
115
F. Servo search voltage H
VFSH
0.30
0.50
0.70
V
116
F. Servo search voltage L
VFSL
-0.70
-0.50
-0.30
V
117
Focus full gain
GFSFG
40.0
44.5
49.0
dB
118
F. Servo AC gain 1
GFA1
17.0
21.0
25.0
dB
119
F. Servo AC phase 1
PFA1
30
60
90
deg
120
F. Servo AC gain 2
GFA2
14.0
17.5
21.0
dB
121
F. Servo AC phase 2
PFA2
30
60
90
deg
122
F. Servo muting
GMUTT
-
-
-15
dB
123
F.Servo AC gain difference
GFAD
1.5
5
8
dB
124
F. Servo AC characteristic 1
GFAC1
1.75
2.25
2.80
125
F. Servo AC characteristic 2
GFAC2
1.05
1.55
2.05
-
126
F. Servo AC characteristic 3
GFAC3
1.05
1.55
2.05
-

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Table 2. Electrical Characteristics (Continued)
No.
Characteristics
Symbols
Test Block
Spec
Unit
Min.
Typ.
Max.
127
T. Servo DC gain
GTO
Tracking
13.0
15.5
18.0
dB
128
T. Servo off offset
VOST1
Servo
-100
0
100
mV
129
T. Servo DAC offset
VTDAC
150
320
700
mV
130
T. Servo auto offset
VTAOF
-55
0
70
mV
131
T.Servo STAT status
VTSTAT
2.2
-
-
V
132
T. Servo oscillation
VTOSC
0
100
185
mV
133
T. Servo ATSC gain
GATSC
17.5
20.5
23.5
dB
134
T. Servo lock gain
GLOCK
17.5
20.5
23.5
dB
135
T. Servo gain up
GTUP
17.5
20.5
23.5
dB
136
T. Servo output voltage H
VTSH
2.2
-
-
V
137
T. Servo output voltage L
VTSL
-
-
0.5
V
138
T. Servo jump H
VTJH
0.30
0.5
0.70
V
139
T. Servo jump L
VTJL
-0.70
-0.5
-0.30
V
140
T. Servo DIRC H
VDIRCH
0.30
0.5
0.70
V
141
T. Servo DIRC L
VDIRCL
-0.70
-0.5
-0.30
V
142
T. Servo output voltage L
GTFF
-
-
-39
dB
143
T. Servo AC gain 1
GTA1
10.5
14.5
17.5
dB
144
T. Servo AC phase 1
PTA1
-180
-135
-90
deg
145
T. Servo AC gain 1
GTA2
18.1
23.1
26.1
dB
146
T. Servo AC phase 1
PTA2
-180
-135
-90
deg
147
T. Servo full gain
GTFG
32
36
40
dB
148
T. Servo AC characteristic1
GTAC1
1.50
2.00
2.50
-
149
T. Servo AC characteristic2
GTAC2
0.40
0.80
1.30
-
150
T. Servo loop mutt AC
TSMTAC
0
50
100
mV
151
SL. Servo DC gain
GSL
Sled Servo
11.0
14.0
17.0
dB
152
SL. Servo feed through
GSLF
-
-
-34
dB
153
Sled forward kick
VSKH
0.40
0.60
0.80
V
154
Sled reverse kick
VSKL
-0.80
-0.60
-0.40
V
155
Sled output voltage H
VSLH
2.2
-
-
V
156
Sled output voltage L
VSLL
-
-
0.5
V
157
Sled lock off
VSLOCK
-100
0
100
mV

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Table 2. Electrical Characteristics (Continued)
No.
Characteristics
Symbols
Test Block
Spec
Unit
Min.
Typ.
Max.
158
SP. Servo 1X gain
GSP
CLV Servo
13.5
16.5
19.5
dB
159
SP. Servo 2X gain
GSP2
19.0
23.0
27.0
dB
160
SP. Servo output voltage H
VSPH
2.2
-
-
V
161
SP. Servo output voltage L
VSPL
-
-
0.5
V
162
SP. Servo AC gain 1
GSPA1
-3.0
5.0
12.0
dB
163
SP. Servo AC phase 1
PSPA1
-120
-90
-50
deg
164
SP. Servo AC gain 2
GSPA2
3.0
10.0
17.0
dB
165
SP. Servo AC phase 2
PSPA2
-120
-80
-50
deg
166
SP.Servo AC gain 3
GSP3
0.85
3
5.0
-

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
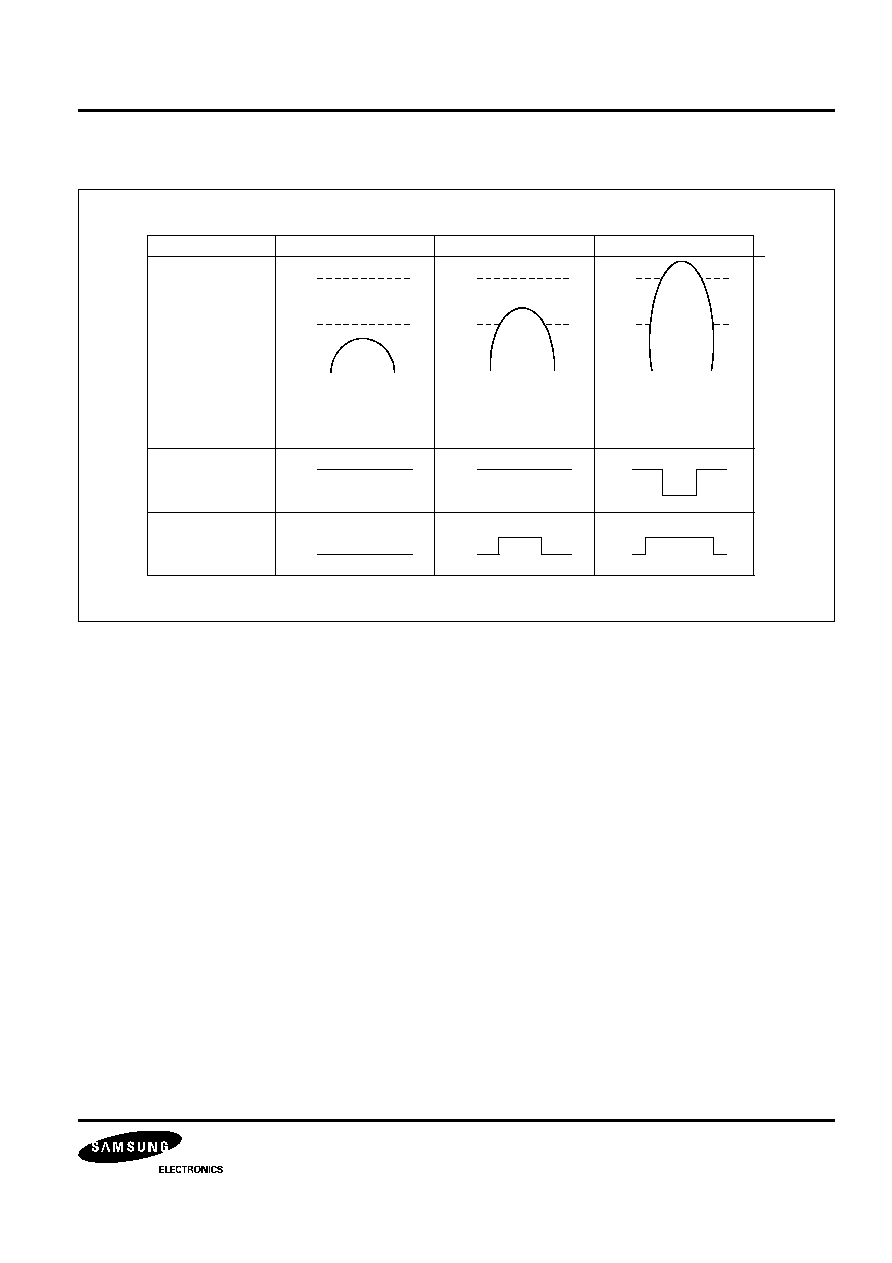
OPERATION DESCRIPTION
MICOM COMMAND
$0X, $1X
Tracking Gain Setting According to Anti-Shock
Item
Address
Data
Istat Output
D7
D6
D5
D4
D3
D2
D1
D0
Focus control
0
0
0
0
FS4
Focus on
FS3
Gain down
FS2
Search on
FS1
Search up
FZC
Tracking
control
0
0
0
1
Anti - shock
Brake - on
TG2
Gain set
TG1
Gain set
ATSC
D7
D6
D5
D4
D3
D2
D1
D0
Istat
ANTI - shock
Lens. Brake - on
TG2 (D3 = 1)
TG1
ATSC
0
1
0
1
0
1
0
1
0
0
0
1
ANTI -
shock off
ANTI -
shock on
Lens
brake off
Lens
brake on
High -
Freq.
gain
down
High -
Freq.
gain
normal
Gain
normal
Gain
up
Item
Hex
AS = 0
AS = 1
Tracking gain control
TG2
TG1
TG2
TG1
TG1. TG2 = 1
gain up
$10
0
0
0
0
$11
0
1
0
1
$12
1
0
1
0
$13
1
1
1
1
$14
0
0
0
0
$15
0
1
0
1
$16
1
0
1
0
$17
1
1
1
1
$13, $17, $1B, $1F (AS0)
$18
0
0
1
1
$13, $17, $18, $1C (AS1)
$19
0
1
1
0
MIRROR muting turns off when the tracking
$1A
1
0
0
1
gain goes up
$1B
1
1
0
0
$1C
0
0
1
1
$1D
0
1
1
0
$1E
1
0
0
1
$1F
1
1
0
0

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
$2X
D7
D6
D5
D4
D3
D2
D1
D0
0
0
1
0
Tracking Servo Mode
Sled Servo Mode
Operation of mode (TM1-TM7)
MODE
TM7
TM5
TM4
TM3
TM2
TM1
TM1
$20
1
0
1
0
1
1
0
0
Track. servo off
$21
1
0
1
0
1
0
0
1
Track. servo on
$22
1
0
0
0
1
1
0
TM2
$23
1
1
1
0
1
1
0
0
Sled. servo on
$24
1
0
1
0
1
1
1
1
Sled. servo off
$25
1
0
1
0
1
0
1
TM4
TM3
Track. kick
$26
1
0
0
0
1
1
1
0
0
Fwd. jump
$27
1
1
1
0
1
1
1
0
1
Jump off
$28
1
0
1
0
0
1
0
1
1
Rev. jump
$29
1
0
1
0
0
0
0
TM6
TM5
Sled kick
$2A
1
0
0
0
0
1
0
0
0
Fwd kick
$2B
1
1
1
0
0
1
0
0
1
Kick off
$2C
1
0
1
1
1
1
0
1
1
Rev kick
$2D
1
0
1
1
1
0
0
TM7 (jump)
$2E
1
0
0
1
1
1
0
1
Lens brake on
$2F
1
0
0
1
1
1
0

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
DIRC (DIRECT 1 Track Jump) Tracking Condition
Register $3X
Item
Hex
DIRC = 1
DIRC = 0
DIRC = 1
TM 654321
654321
654321
Tracking Mode
$20
000000
001000
000011
$21
000010
001010
000011
$22
010000
011000
100001
$23
100000
101000
100001
$24
000001
000100
000011
$25
000011
000110
000011
$26
010001
010100
100001
$27
100001
100100
100001
$28
000100
001000
000011
$29
000110
001010
000011
$2A
010100
011000
100001
$2B
100100
101000
100001
$2C
001000
000100
000011
$2D
001010
000100
000011
$2E
011000
000100
100001
$2F
101000
100100
100001
Address
Focus
& Sled
Focus search
SLED KICK
T.servo
cpeak mutting
Tracking jump
D15-D12
D11
D10
D9
D8
D7
D6
D5
D4
0011
Level
value
PS4
search+2
PS3
serach+1
PS2
Kick+2
PS2
Kick+1
Mutting when
above EFM11T
PS5
Jump +1
PS6
Jump 1/2
PS7
Jump 1/4
1X
0
0
0
0
0: OFF
1: ON
0
0
0
0X (0u)
0
0
1
0.25X (1.25u)
2X
0
1
0
1
0
1
0
0.50X (2.50u)
0
1
1
0.75X (3.75u)
3X
1
0
1
0
1
0
0
1.00X (5.00u)
1
0
1
1.25X (6.25u)
4X
1
1
1
1
1
1
0
1.50X (7.50u)
1
1
1
1.75X (8.75u)
INITIAL
0
0
0
0
0
1
0
0
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Select (First 8 bits of 16 bits)
ADDRESS
INTC
FSET
(Focus, tracking CVL Pole Freq. setting resistor)
D15-D12
D3
D2
D1
D0
0011
F.Servo
Cpeak Mutt
FSETC
FSET2
24K
FSET1
12K
Mutting
when above
EFM11T
0
X
X
External resistor applied
1
(104K)
0
0
140K (580K)
0
1
116K (480K)
1
0
128K (530K)
1
1
104K (430K)
INITIAL
0
1
1
1
D15
D14
D13
D12
D11
D10
D9
D8
Istat
0
0
1
1
Focus Servo
Search Level Control
Sled Servo
Kick Level Control
SSTOP
PS4
PS3
PS2
PS1
Search +2
Search +1
Kick +2
Kick +1
Data Mode (level)
Search X1
$30XX-$33XX
Kick X1
$30XX, $34XX,
$38XX, $3CXX
Search X2
$34XX-$37XX
Kick X2
$31XX, $35XX,
$39XX, $3DXX
Search X3
$38XX-$3BXX
Kick X3
$32XX, $36XX,
$3AXX, $3EXX
Search X4
$3CXX-$3FXX
Kick X4
$33XX, $37XX,
$3BXX, $3FXX
Data
S.X1, K.X1
S.X2, K.X2
S.X3, K.X3
S.X4, K.X4
$30XX
$35XX
$3AXX
$3FXX
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Auto-Sequence Mode
Speed Related Command ($F00, F03)
Address
Data
0
1
0
0
D3
D2
D1
D0
Auto-sequence cancel
0
0
0
0
Auto-focus
0
1
1
1
1-track jump
1
0
0
0: FWD
10-track jump
1
0
1
1: REV
2N-track jump
1
1
0
M-track jump
1
1
1
Fast search
0
1
0
Address
Data
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
1
1
1
1
0
0
0
0
1X Speed ($F00, $F04, $08, $F0C)
x
x
0
0
2X Speed ($F03, $F07, $F0B, $F0F)
x
x
1
1

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
RAM Register Set
Item
Data
Address
D7
D6
D5
D4
D3
D2
D1
D0
Blind A, E
Overflow. C
$50XX
0.18ms
0.09ms
0.04ms
0.02ms
BRAKE. B
0.36ms
0.18ms
0.09ms
0.04ms
FAST F
23.2ms
11.6ms
5.80ms
2.90ms
FAST K
0.72ms
0.36ms
0.18ms
0.09ms
INI.
1
0
0
0
1
0
0
0
Control
$51XX
PS3X
PSTZC
ATS
FZCOFF
TRSTS
TZCIC
MCC1
EQR
Register
SSTOP
on/off
TZC
on/off
ATSC
on/off
FZC
on/off
T.Bal &
GainReset
TZC. Input
EQC output
AGC IN
Level
0
Off
Off(SSTOP)
T.BAL
Off
Reset
TERR
RFO
2/3 IN
1
On
On (TZC)
ATSC
On
Set
FERR
EQO
Normal
INI.
1
1
1
1
1
0
1
1
Control
$52XX
FJTS
PEAKC
FEB5
FEB4
FEB3
FEB2
FEB1
FEB0
Register
TEO output
when fast
search
EFM
Peaking
Ref posi-offset(3V)
Ref voltage 3V
depend on voltage
Febias offset
FSIO offset
control the option
RFO nega-offset
fixed unrelated voltage
MSB
10mv/step
LSB
MSB
10mv/step
LSB
0
T.Jump
off
00
0mV
off
on
(-150mV)
00
-250mV
01
+125mV
01
0mV
1
T-off
(TEO off)
on
10
0mV
on
(+150mV)
off
10
-125mV
11
+250mV
11
0mV
INI.
1
0
0
0
0
1
1
1
Febias
offset
regard on
control
Before control the Febias offset $51xx TZCIC is set as the FERR `1' and monitored TZC output .
The ISTAT output set + offset , Febias offset control in sequence.
If ISTAT of TZC output set - offset, $52XX is set as the FEB2 `0'.
After get - offset, Febias offset control in sequence.
* Remark : Phase of TZC output is opposite the input.

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Address
HEX
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
KICK D
$6XXX
11.6ms
5.80ms
2.90ms
1.45ms
FAST R
23.2ms
11.6ms
5.80ms
2.90ms
PWM DUTY
PD
8
4
2
1
PWM WIDTH
PW
11.0ms
5.43ms
2.71ms
1.35ms
INI.
0
1
1
1
1
0
1
0
0
0
1
0
2N TRA. N
M TRA. M
$7XXX
4096
2048
1024
512
256
128
64
32
16
8
4
2
Fast searchT
$7XXX
16384
8192
4096
2048
1024
512
256
128
64
32
16
8
INI.
0
0
0
0
0
0
1
1
1
1
1
1
Brake point P
$CXXX
16384
8192
4096
2048
1024
512
256
128
64
32
16
8
INI.
0
0
0
0
0
0
1
1
1
0
0
0
CLV on/off register
CLV on, EFM on $99X1~$99XF
X
X
X
X
X
X
X
1
CLV off, EFM off $99X0
X
X
X
X
0
0
0
0
INI
1
0
0
1
X
X
X
X
0
0
0
0
Notice.
The actual value may be slightly different from the set value.
A set value + 4 - 5 WDCK
B, D, E set value + 3 WDCK
C set value + 5 WDCK
N, M, T, P set value + 3 TRCNT
Caution
- Among the 16 settings of PWM WIDTH 'PW' only one from D3, D2, D1, and D0 can be selected.
(not 4bit combination)
- More than 512 tracks are not recommended when 2N track and M track are used.
(algorithm possesses problem generation)
- Because PWM DUTY 'PD' can have 1 - 2 errors, should be set to "set value + 2"
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
AUTOMATIC CONTROL COMMAND
Tracking Balance and Gain Control
Tracking Balance and Gain Control Window & APC ON/OFF
Address
Address
Data
D7
D6
D5
D4
D3
D2
D1
D0
Tracking BAL.
$800X - $801X
0
0
0
B4
B3
B2
B1
B0
Initial V.
0
1
1
1
1
Tracking Gain.
$810X - $811X
0
0
0
G4
G3
G2
G1
G0
Initial V.
1
0
0
0
0
ADDRESS
DATA
D7
D6
D5
D4
D3
STGW
STBW
F.S.O.C
F.E.O.C
LDON
$84X
Tracking gain
control windows
Tracking
balance control
windows
F.Servo
offset control
FB.BIAS
offset control
$85
LD
ON/OFF
TGL
TGH
ISTAT
250mV
200mV
-20mV-20mV
OFF
OFF
OFF
150mV
300mV
-30mV-30mV
ON
ON
ON
INITIAL
0
0
0
0
0
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Additional Register Set
$8EXX Focus & Tracking Servo Filter Control Command
D3
D2
D1
D0
D3
D2
D1
D0
RSTS
EQOC
DFCT1
DFCT2
DIRC
RSTF
AGCL
EQB
$86X
Focus
servo
offset
DAC
reset
EQ0
offset
Vref(1)
VCC
follow(0)
Defect
input
gain
Input
offset
addition
&87X
Direct
1 track
JUMP
Focus
error
DAC
RESET
EQ0
output
level UP
EQ
respose
GM
0
Reset
Normal
1.5X
VR+0.25V
0
ON
Reset
UP
12u
1
Set
Buffer
1X
VR+0.35V
1
OFF
Set
Normal
18u
INITIAL
1
1
1
1
INITIAL
1
1
1
1
Address
Data
D7
D6
D5
D4
D3
D2
D1
D0
$8EXX
CLV Freq. movement
0: low frequency
1: high frequency
T. Servo Phase shift
0: low frequency
1: high frequency
Fcous freq. movement
0: low frequency
1: high frequency
0
On
On
On
On
On
On
On
On
1
Off
Off
Off
Off
Off
Off
Off
Off
Initial V.
1
0
1
1
0
1
1
0

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
$8FXX Tracking Servo Offset Control Command
Address
Data
D7
D6
D5
D4
D3
D2
D1
D0
$8F00
$8F1F
X
X
X
Tracking servo offset control command
8F(000XXXXX)
$8F1F
$8F00
(-160mV
+160mV)
Control window is used with the balance window and
monitors the ISTAT output
Because tracking offset of approximately +30mV - +50mV
is ideal in the system, consider the control setting by raising
to ($8F1F
$8F00) 3 - 5 steps after controlling the offset
to 0mV.
<Notice> Consider the measure setting by $8010 command
of tracking switch and $811F command of tracking gain
switch after $24 command.
Initial V.
0
0
0
1
0
0
0
0

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Photo-Diode I/V AMP Gain Setting for CD-R and CD-RW
Address
DATA
D7
D6
D5
D4
RF & FERR GAIN
RFO ONLY GAIN
RFO TOTAL
Focus
gain
down
RWC3
1.5X
RW2C
2.0X
RWC1
1.25X
I/V AMP
Equivalence
resistance
Input
resistance
55K
Gain
Summing
Resistance
RFO Feed
resistance
ratio 22K
RFO LOOP
TOTAL
$82XX
RFO Focus error
RFO
only
1 stage gain
2 stage gain
RFO
total
Compare
to F
07(0F)
Focus
gain
down
bit
1
1
1
58.5K
1.06
10K
22K/10K=2.2
9.33
1.00
06(0E)
1
1
0
91.5K
1.66
10K
22K/10K=2.2
14.61
1.56
05(0D)
1
0
1
121.75K
2.21
10K
22K/10K=2.2
19.45
2.08
04(0C)
1
0
0
154.75K
2.81
10K
22K/10K=2.2
24.73
2.65
03(0B)
0
1
1
154.75K
2.81
10K
22K/10K=2.2
24.73
2.65
02(0A)
0
1
0
187.75K
3.41
10K
22K/10K=2.2
30.00
3.21
01(09)
0
0
1
218.00K
3.96
10K
22K/10K=2.2
34.84
3.73
00(08)
0
0
0
251.00K
4.56
10K
22K/10K=2.2
40.33
4.32
0
down
up
up
up
Set the 8 when CD-RW mode
1
normal
normal
normal
normal
INITIAL
1
1
1
1

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Tracking Error CD-RW Mode Gain
Address
DATA
D3
D2
D1
D0
Tracking Error
Terr total
SPEAK
RWC8
1.5X
RWC7
2.0X
RWC6
1.5X
I/V AMP
equivalence
resistance
Input
Resistance
82K gain
Resistance
Difference
Tracking
feed
resistance
ratio 22K
TERR LOOP
TOTAL
$82XX
Tracking error
gain
TE
difference
1 stage gain
2 stage gain
Terr
total
compare
to 7
07(0F)
EFM
Duty
Check
Freq.
1
1
1
391K
1.06
30K
96K/30K=32
3.392
1.00
06(0E)
1
1
0
583K
1.66
30K
96K/30K=32
5.312
1.56
05(0D)
1
0
1
786K
2.21
30K
96K/30K=32
7.07
2.08
04(0C)
1
0
0
979K
2.81
30K
96K/30K=32
8.992
2.65
03(0B)
0
1
1
979K
2.81
30K
96K/30K=32
8.992
2.65
02(0A)
0
1
0
1171K
3.41
30K
96K/30K=32
10.91
3.21
01(09)
0
0
1
1374K
3.96
30K
96K/30K=32
12.67
3.73
00(08)
0
0
0
1567K
4.56
30K
96K/30K=32
14.592
4.32
0
88K
up
up
up
Set the 0 (4.01X) when CD-RW mode setting
(because need long lead in time to check 8 setp)
1
44K
Norma
l
Norma
l
Normal
INITIAL
0
1
1
1

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
ISTAT output Monitor Select Mode & RFO Offset Control.
Address
DATA
D7
D6
D5
D4
D3
D2
D1
D0
MGA1
MGA2
RFOC
TOCD
EMODEC
CSTAT
RFBC
GSEL
$83XX
Mirror
input gain
Mirror
bias addition
T.Gain win input
select
Tracking offset
comtrol on/off
EFM slice
mode
ISTAT
output
option
RFO offset
FOK select
T.Gain
windows sel
0
2X
off
focus error
off
Double ASY
CSTAT
FOK
200/300mV
1
1.5X
on
T.Gain
on
Vref
CSTATB
RFO offset
400/500mV
INITIAL
1
0
1
1
1
1
0
0
Command.
Solution
CD-RW Detect
Method focus error
CD-RW distinction
The monitor output in the table above is set as the focus error output and the focus error output level comparison
$81XX is sent to ISTAT1 and ISTAT2 to allow the micom to monitor the focus error output.
After $81XX is sent, it possible to monitor because the tracking gain window comparator are used commonly.
With search command ($47), if the intensity of radiation set its target, focus search level is 1Vp-p, and peak value is
0.5V. As the table below, windows level transmit $84CX $513X command, ISTAT1 monitored at 500mV
GSEL
ISTAT
output mode
TGL
GSEL(TGH)
0
1
$844X
250mV
200mV
400mV
Use the 6 types tracking gain window to distinguish the CD and CD-
RW disc.
$84CX
150mV
300mV
500mV
ISTAT
CSTAT
5X
6X
7X
1X
ISTAT output
1
Cpeak
FZCB
TZCB
ATSC
Change the ISTAT output by CSTAT
0
FSDFCT
MIRROR
DFCINT
FOK, LOCK or output
Change the ISTAT output by CSTAT
INITIAL.
1
1
1
1
Change the ISTAT output by CSTAT
0X
FOK
2X
TRCNT
3X
SSTOP
4X
Auto SEQ BUSY signal
$841
Focus Error Offset window
$842
Focus Servo Offset window
$CXXXX
Tracking gain window (TGL)
$80XX
Tracking Balance window
$81XX
Tracking Gain window (TGH)
$8FXX
Tracking Servo offset window
$99XX
$9900 CLV
OFF
$9901 - $991F CLV ON
CLV Command decording

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
AUTO-SEQUENCE
This function executes the chain of commands that execute auto-focus, track jump, and move. MLT latches the
data at time L, and ISTAT is L during auto-sequence. It output H upon.
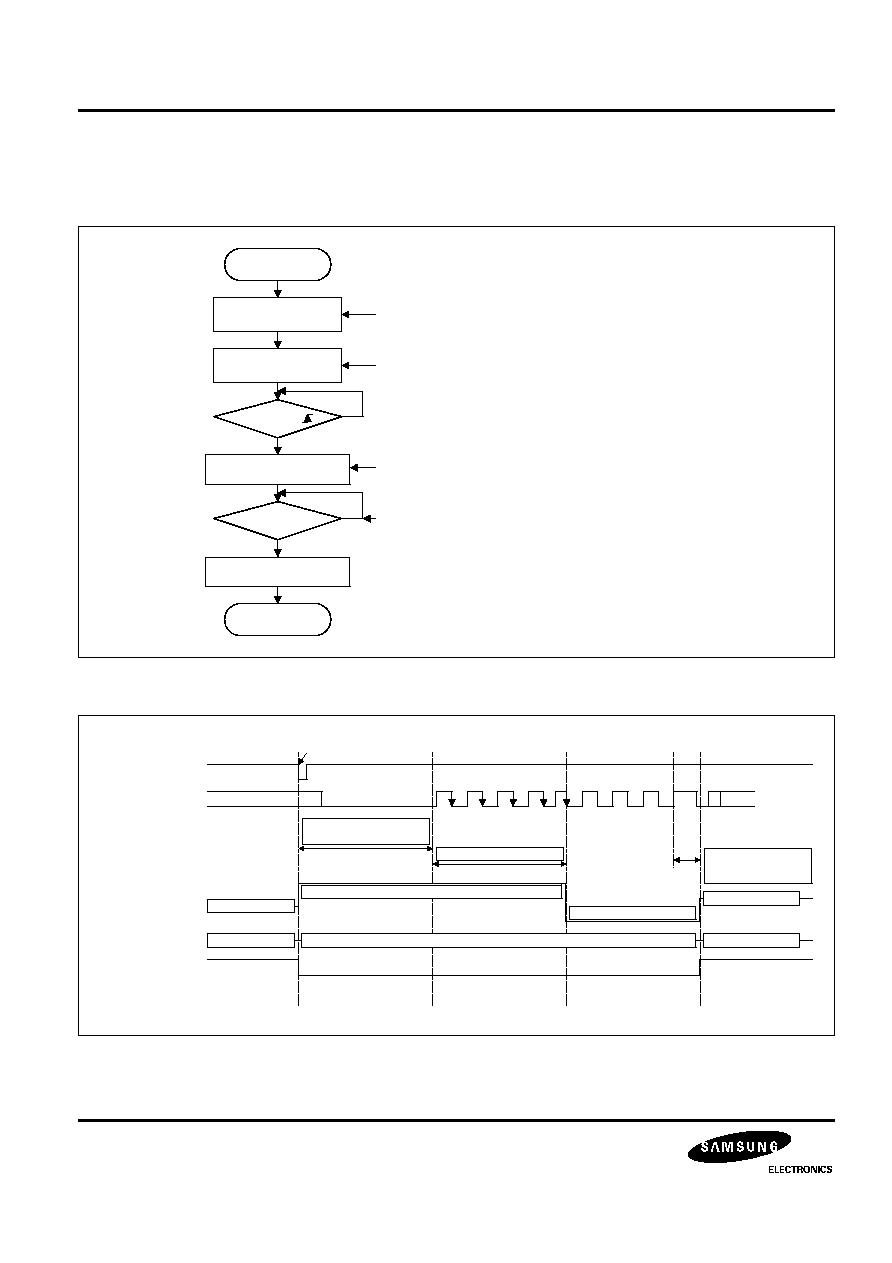
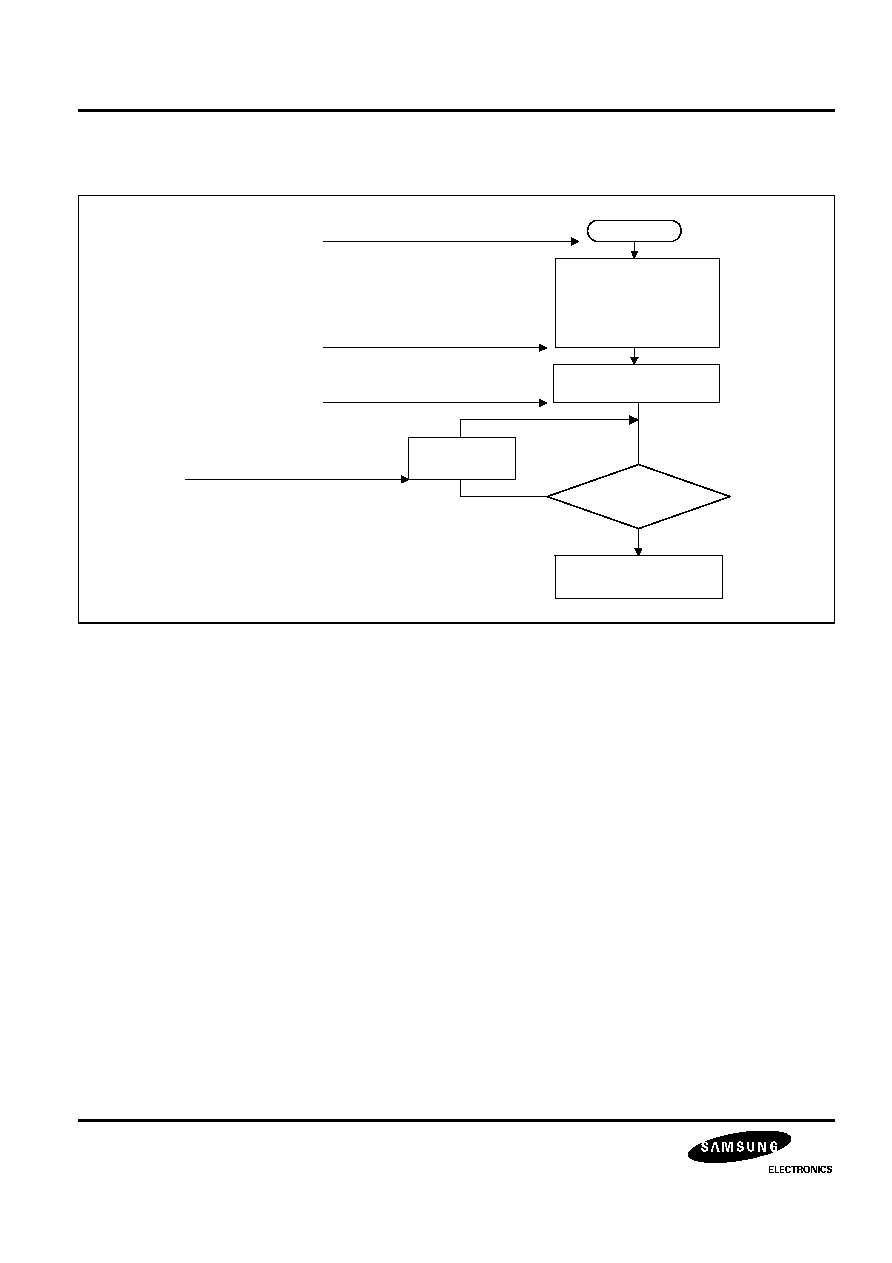
AUTO FOCUS
Flow-Chart
Timing Chart
Auto-focus receives the auto-focus command from the MICOM in the focus search down state and focus search
up. The SSP becomes focus servo on when FZC changes to L after the internal FOK RZC satisfy 'H', all the time
set blind 'E' (Register $5X). All the internal auto focus executes ended. And this status is sent to micom through the
ISTAT output.
Focus Search UP
Focus Servo ON
NO
YES
NO
YES
NO
YES
Auto Focus
END
FOK = H
FZC = H
FZC = L
During Blind "E" time set by register 5, FOK and
FZC executions repeat until they become "H".
$47 Latch
Blind Time E
FOK, FZC -> H
Search UP
Search DOWN
$02
$03
$03
$03
$08
Internal STATUS
Focus Output
FOK
MLT
Focus Servo ON
FZC
ISTAT

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
1 TRACK JUMP {$48(FWD), $49(REV)}
Flow-Chart
1 Track Jump Timing Chart {$48(FWD), $49(REV) inside ( ) Reverse}
Receives $48 ($49) for 1 track jump and sets the blind and brake times through register $5X.
Track Jump
Sled Servo OFF
WAIT Brake "B"
NO
YES
WAIT (Blind A)
Track REV Jump
Track, Sled Servo On
1 Track Jump
END
Trcnt =
Forward jump when $48 and reverse jump
when $49
Wait using the WDCK reference clock for
blind "A" time, set by register 5.
(1 WDCK = 0.011mS)
Repeat check of whether TRCNT is
continuously in "H" state with the WDCK
reference clock for the brake "B" time, set
by register 5, at the TRCNT rising edge.
$47 ( $49)
Blind Time A
WAIT
Blind Time B
Trcnt "H"
Tracking Farward Jump
Track Servo ON
Tracking Revrese Jump
Track Servo ON
Sled Servo ON
Sled Servo OFF
Sled Servo ON
$25
$28 ($2C)
$28 ($2C)
$2C ($28)
$25
ISTAT
Sled Output
Track Output
TRCNT
MLT
Internal STATUS
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
10 TRACK JUMP {$4A(FWD), $4B(REV)}
Flow-Chart
10 Track Jump Timing Chart {$4A(FWD), $4B(REV) inside ( )Reverse }
10 track jump executes the tracking forward jump up to trcnt 5track count and turns on the tracking and sled servos
after a tracking reverse jump until trcnt 1's cycle is longer than the overflow 'C' time. This operation checks whether
the actuator speed is sufficient to turn on the servo.
Track FWD Jump
Sled FWD Kick
Trcnt = 5
NO
YES
WAIT (Blind A)
Track REV Jump,
Sled FWD Kick
Track, Sled Servo ON
NO
YES
10 Track Jump
END
C = Over Flow?
Foward jump & kick when $4A and reverse jump &
kick when $4B.
Wait using the WDCK reference clock for blind "A"
time, set by register 5. (1 WDCK = 0.011mS)
Tracking reverse jump & sled forward kick when $4A
and tracking forward jump & reverse kick when &4B.
Repeat check of TRCNT 1's cycle with the WDCK
reference clock to determine if the cycle is long than
the overflow "C" time, set by register 5.
$4A ( $4B)
Blind Time A
WAIT
Trcnt 5 Count
Tracking Forward Jump
Track Servo ON
Tracking Revrese Jump
Track Servo ON
Sled Servo ON
Sled Forward Kick
Sled Servo ON
$25
$2A ($2F)
$2A ($2F)
$2E ($2B)
$25
ISTAT
Sled Output
Track Output
TRCNT
MLT
Over Flow Time C
Trcnt 1's Time Check
FWD
REV
Internal STATUS

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
2N TRACK JUMP
Flow-Chart
Track FWD Jump,
Sled FWD Kick
NO
YES
WAIT (Blind A)
Track REV Jump,
Sled FWD Kick
WAIT (Kick "D")
NO
YES
Track Servo ON,
Sled FWD Kick
Tracking & Sled Servo ON
2N Track Jump
END
Trcnt = N?
C = Over
Flow?
Foward jump & kick when $4C and reverse jump &
kick when $4D.
Wait using the WDCK reference clock for blind "A"
time, set by register 5. (1 WDCK = 0.011mS)
Tracking reverse jump & sled forward kick when $4C
and tracking forward jump & reverse kick when $4D.
Repeat check of TRCNT 1's cycle with the WDCK
reference clock to determine if the cycle is longer
than the overflow "C" time, set by register 5.
When $4C, the sled forward kick continues for KICK
"D" time.
When $4D, the sled reverse kick continues for KICK
"D" time.

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
2N Track Jump Timing Chart {$4C(FWD), $4D(REV) inside ( ) Reverse }
Similar to 10 tracks and executes by adding sled kick by the amount of kick 'D' time and the servo turns on after
lens brake starts.
$4C ( $4D)
Blind Time A
WAIT
Trcnt N Count
Tracking Forward Jump
Track Servo ON
Tracking Revrese Jump
Track Servo ON
Sled Servo ON
Sled Forward Kick
Sled Servo ON
$25+$17
$2A ($2F)
$2A ($2B)
$2E ($2B)
$25+$18
ISTAT
Sled Output
Track Output
TRCNT
MLT
Over Flow Time C Trcnt
1's Cycle Time Check
FWD
REV
C
C
Kick Time D
Sled FWD Kick
for D Time
Q Data Read
Enable
$26($27)
Internal STATUS

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
M TRACK JUMP {$4E(FWD), $4F(REV)}
Flow-Chart
M TRACK JUMP TIMING CHART {$4E(FWD), $4F(REV) INSIDE () REVERSE}
Makes Trcnt to clock and counts to the value of M count, set by register 7, to execute sled kick.
Track Servo OFF,
Sled FWD Kick
NO
YES
WAIT (Blind A)
Tracking & Sled Servo
ON
M Track Jump
END
TRCNT = M?
Sled FWD kick when $4E and REV kick when $4F.
Wait using the WDCK reference clock for blind "A"
time, set by register 5. (1 WDCK = 0.011mS)
Count trcnt with the clock for M amount, set by
register 7.
$4E ( $4F)
Blind Time A
WAIT
Trcnt N Count
Tracking Servo OFF
Track Servo ON
Treck Servo ON
Sled Servo ON
Sled Forward Kick
Sled Servo ON
$25
$22 ($23)
$22 ($23)
$22 ($23)
$25
ISTAT
Sled Output
Track Output
TRCNT
MLT
FWD
REV
Internal STATUS

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
FAST SEARCH
Flow-Chart
Track Servo ON,
Sled FWD Kick
WAIT (Blind F)
NO
YES
Track FWD Jump,
Sled FWD Kick
WAIT (Blind K)
Track FWD Jump,
Sled FWD PWM Kick
NO
YES
Track Servo ON,
Sled REV Kick
WAIT (REV. Kick "R")
Tracking & Sled
Servo ON
Fast Search
END
Trcnt = T?
Trcnt = P?
Sled forward kick when $44 and sled reverse
kick when $45.
Tracking forward kick jump and sled forward
kick when $44 and tracking reverse jump and
sled reverse kick when $45
Execute the above conditions until TRCNT is
the same as the brake point "P" count
value, set by register 7.
Repeat checks Trcnt, until Trcnt equals T set by
register 7, like the PD and PW set by register
6, PWMs duty is decided with the PWs PWM1
period width used as the period, and PDs high.
Low duty used as standard 4 bits
(number selected from 0 - 15)
When $44, the sled forward kick continues for
kick "R" time.
When $45, the sled reverse kick continues for
kick "R" time.

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
FAST SEARCH TIMING CHART {$44(FWD), $45(REV) INSIDE () REVERSE}
To Note During use of Auto-Sequence
1.
Must send tracking gain up and brake on ($17) during 1, 10, 2N, track jump, and fast search.
2.
Before the auto-sequence mode, MLT becomes 'L' and sequence operation executes at the initial WDCK falling edge
after data latch.
3.
During play, determine as FOK and GFS, not ISTAT.
4.
Tracking gain up, brake, anti-shock and focus gain down are not executed in auto-sequence, and separate command must
be provided.
5.
If the Auto-sequence does not operate as Istat Max time over, apply $40 and use after clearing the SSP internal state.
6.
The above indicated WDCK receives 88.2kHz from DSP. (2x
176kHz)
7.
The auto-sequence internal trcnt and the actual trcnt are slightly different.
8.
Problems can be generated in the algorithm for 2N and M tracks if jump of more than 512 tracks are attempted; therefore,
use them for less than 512 track jumps, if at all possible.
9.
Use the fast-search algorithm for more than 512 tracks, if possible.
$44 ( $45)
Blind Time F
WAIT
Trcnt P Count
Sled Servo ON
Tracking Forward Jump
Track Servo ON
$25+$17
$26 ($27)
$2A ($2F)
$26 ($27)
$25+$18
ISTAT
Sled Output
Track Output
TRCNT
MLT
FWD
REV
Blind K
WAIT
Trcnt T
Count
Kick "R"
Walt
Sled REV
Kick
Sled Servo ON
Sled Servo ON
Sled Forward Kick
$5XX1 Tracking Servo Mutt
Sled servo
Kick
Internal STATUS

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
TRACKING BALANCE CONTROL CONCEPT
In tracking balance control, the micom compares and monitors the previously set DC voltage window and the
tracking error DC offset, extracted from the external LPF for automatic control.
Summary of Operation
When the focus and spindle servos are on, tracking balance control turns off the tracking and servo loops to open
the tracking loop, extracts the DC offset by sending the error signal, passed through the optical pick-up and
tracking error amp, through the external LPF, then this offset to the previously set window comparator level, and
then informs of the completion the balance control to the micom through the ISTAT, when the dc offset of the
tracking error amp in window is extracted. At this time, Tracking E beam-side I/V amps gain is selected by MICOM,
and the 5-bit resistance arrays resistance value is selected by the 5-bit control signal.
The values that MICOM applies are 00000
11111. If you select the switch, TESO DC offset increases the (2.5V-
V)
(2.5V +
V) one step at a time, to enter the pre-selected DC window level. When it enters that level, the
balance adjust is completed, and the switch condition is latched at this time
Because the TESO signal frequency is distributed up to 2kHz, the DC offset that passed through the LPF is not a
correct value, if a DC component exists, and therefore, micom monitors the window output when the TESO signal
frequency is above 1kHz. At this time, the frequency check the ISTAT pin. When TBAL output is H, balance control
is complete.
Vdc < RLI <RHI
RLI < Vdc < RHI
RLI < RHI < Vdc
RHO
H
H
L
RLO
L
H
H
TBAL (AND gate)
L
H
L
I/V AMP
FDL FT2
Gain adjust
5bit Arrary
5bit (B4-B0)
from Micom
-
TE1
LPFT
LPF
AND
Logic
D Q
CK
MIRROR
TZC
TBAL
RHO
RLO
E Beam
F Beam
F
E
+
-
+
-
RH
RH
Vdc
5 bit arrary
Gain control
ISTAT1
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
RHI: High level threshold value
RLI: Low level threshold value
Vdc: Window comparator input voltage
TBAL: And gate output value of the window comparator output
An Example of Tracking Balance Control
Out of $8000
$801F 32 steps, the upper and lower 32 steps are used and recommand the CLV to CLV-P mode.
After receiving $8110 as the gain when the focus and tracking are on, the control flow checks TRCNT frequency in
ISTAT to see if the more than 7 TRCNT entered during 10ms. If yes, it checks the ISTAT, if no, it checks the
number of TRCNT three times and goes on to the ISTAT check.
Repeats fail, it raises the balance switch by 1 step. If ISTAT does not immediately go to H, it for 10 ms during
ISTAT check after which it check whether ISTAT is H continuously for 10ms, is repeated three times. If the three
repeats fail, it raises the balance switch by 1 step.
The above wait 10 ms while running the system. It finds the average of the values obtained the three repeated
execution of the entire above balance control. If only the balance values are from two of the three repeats, these
values are averaged. If only two out of the three tries were successful in getting a balance value, average the two
values. Set as balance switch, this average value +2. This is because the balance for the system and the minus
value for the DC is stable in the system. Precision is important in balance adjust, and about 1+2 sec is spent as
adjust time, which is accounted for.
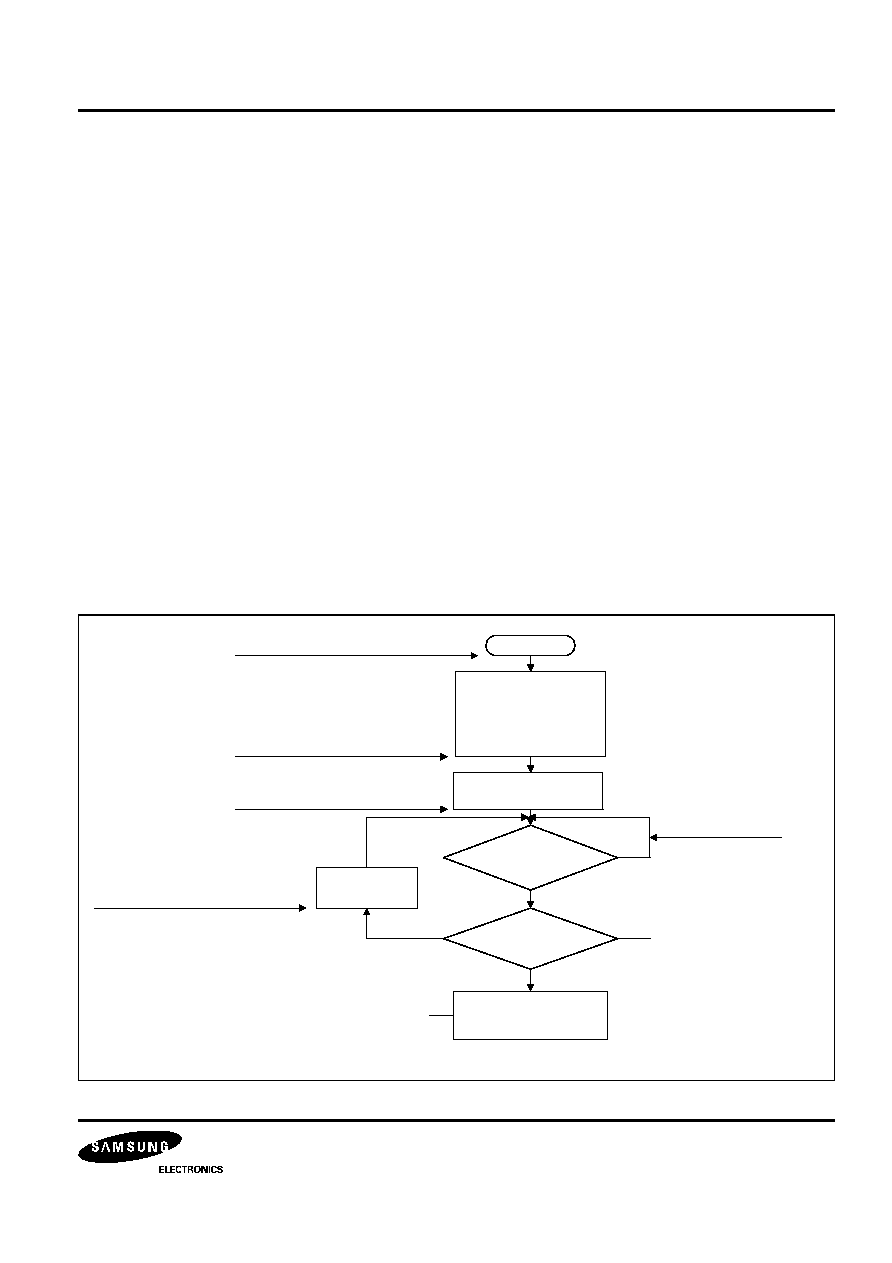
Balance Control Flowchart 1
Start
- Environment Setting
Focus on $08
Spindle on CLV-P mode
Tracking off $20
Sled off gain $8110
Balance Window Level
Setting
Check to see if
TRCNT is 7 for 10ms
ISTAT = H?
Present Control Value
+2 Step then, ADJ end.
B0 to B4
Switch Control
Balance ADJ. Start $8000
Other Method
- Can balance adjust while
moving tracks
- $F03 easy to trcnt freq
check in the 2X mode
-20mV - +20mV $84 X0XX
-30mV - +30mV $84 X1XX
Almost
±
20mV
Is ISTAT = H?
Check if ISTAT is H after
waiting 10ms repeat 3 times
Change switch if failure
after 3 repeats
Repeat 3 times
Change switch if failure
after 3 repeats
NO
YES
YES
NO
Balance ADJ. Switch
Incnease by 1 step
$8000 -> $801F
If finds the average of the values obtained the
three repeated execution of the entire above
bacance control.
If only two out of the three tries ware successtial in
getting a bacance value, average the two value.

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Balance Control Flowchart 2
When Tracking Balance
∑
The balance adjust is from $8000 to $801F, and the switch mode is changed one step at a time by 16-bit data
transmission. After adjustment, a separate latch pulse is not necessary.
∑
If the Trcnt freq. is not high enough, the balance control can be adjusted at $F03 applied 2x mode .
∑
Here, we have suggested tracking off status for the balance adjust, but the same amount of flow can be
balance adjusted while in track move.
∑
Among the 16 bit data, the tracking balance window setting level can be selected from 0: -20 mV
+20mV
1: -30mV
+30mV through the D6 bit.
∑
When the tracking balance adjust is complete, the tracking gain control starts.
Start
Environment Setting
- Focus on $08
- Spindle on CLV-P mode
- Tracking off $20
- Sled off gain $8110
Balance Window Level
Seting
TRCNT Freq is
High Enough?
ISTAT = H?
End ADJ.
B0 to B4
Switch Control
Balance ADJ. Start $8000
Other Method
- Can balance adjust while
moving tracks
- $F03 easy to trcnt freq.
check in the 2X mode
Balance ADJ. Switch
Incnease by 1 step
$8000 -> $801F
-20mV - +20mV $84 X0XX
-30mV - +30mV $84 X1XX
NO
YES
YES
1kHz Check
NO
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Tracking Balance Equivalent Resistance
Tracking Balance
Fixed Resistance and
Parallel Resistance
Variable Resistance (5bit)
Data
TSIO
offset
F equi-
valent
Res.
E equi-
valent
Res.
100K/
5bit R
5bit
equi-
valence
35K
70K
140K
280K
560K
Comments
$8000
391K
480K
15.22K
17.9K
1
1
1
1
1
$8001
391K
475K
15.6K
18.6K
1
1
1
1
0
$8002
+
391K
468K
16.1K
19.3K
1
1
1
0
1
$8003
391K
463K
16.5K
19.7K
1
1
1
0
0
$8004
391K
455K
17.2K
20.8K
1
1
0
1
1
$8005
391K
451K
17.6K
21.5K
1
1
0
1
0
$8006
391K
444K
18.3K
22.4K
1
1
0
0
1
$8007
391K
439K
18.9K
23.3K
1
1
0
0
0
$8008
391K
433K
19.5K
24.3K
1
0
1
1
1
$8009
391K
426K
20.4K
25.5K
1
0
1
1
0
$800A
-
391K
421K
21.0K
26.6K
1
0
1
0
1
70K//35K = 23.3K 1
$800B
391K
415K
21.9K
28.0K
1
0
1
0
0
280K//140K = 93.3K 2
$800C
391K
409K
22.7K
29.4K
1
0
0
1
1
560K//280K = 186.6K 3
$800D
391K
403K
23.7K
31.1K
1
0
0
1
0
140K//35K = 28K 4
$800E
391K
397K
24.7K
32.9K
1
0
0
0
1
280K//35K = 31.1K 5
$800F
391K
391K
25.9K
35K
1
0
0
0
0
560K//35K = 32.9K 6
$8010
391K
385K
27.1K
37.2K
0
1
1
1
1
140K//70K = 46.6K 7
$8011
391K
380K
28.5K
39.9K
0
1
1
1
0
280K//70K = 56K 8
$8012
391K
374K
30.0K
43.0K
0
1
1
0
1
560K//70K = 62.2K 9
$8013
391K
368K
31.7K
46.6K
0
1
1
0
0
1//2 = 18.56K 10
$8014
391K
361K
33.9K
51.4K
0
1
0
1
1
10//560K = 17.96K
$8015
391K
357K
35.8K
56K
0
1
0
1
0
$8016
391K
350K
38.3K
62.2K
0
1
0
0
1
$8017
391K
344K
41.1K
70K
0
1
0
0
0
$8018
391K
336K
44.5K
80.4K
0
0
1
1
1
$8019
391K
332K
48.4K
93.9K
0
0
1
1
0
$801A
391K
327K
52.8K
112K
0
0
1
0
1
$801B
391K
321K
58.3K
140K
0
0
1
0
0
$801C
391K
315K
65.1K
187K
0
0
0
1
1
$801D
391K
309K
73.6K
280K
0
0
0
1
0
$801E
391K
303K
84.8K
560K
0
0
0
0
1
$801F
391K
298K
100K
0K
0
0
0
0
0
252K
13K
26K
F Equivalence
Resistance
252K
13K
5bit
E Equivalence
Resistance
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
TRACKING GAIN CONTROL CONCEPT
Operation Summary
Tracking gain control is executed by comparing the previously set gain set value of the window with the only the
pure AC component of the signal TEIO (DC+AC) , which was extracted the resistance divide of the tracking error
amp output, passed through the LPF and DC offset .
The resistance divide regulates the gain by changing the 5 bit resistance combination with micom command. The
tracking gain control is executed under the balance control, the same of focus loop on, spindle servo on, tracking
servo off and sled servo off and controls amount of optical pick-up reflection and tracking error amp gain. External
LPF cut-off freq. Is 1o 10Hz - 100Hz. The window comparator comparison level can be selected between +150mV
- +300mV and +250mV - 200mV using the micom command.
TGL outputs the +150mV and
+250mV comparator outputs to TRCNT.
TGH outputs the +300mV and
+200mV comparator outputs to ISTAT.
Gain control completes control when TGL output is H.
Vac < GLI <GHI
GLI < Vac < GHI
GLI < GHI < Vac
TGH (ISTAT output)
H
H
L
TGL (TRCNT output)
L
H
H
I/V AMP
I/V AMP
5bit (G4-G0)
From Micom
-
TE1
LPFT
LPF
AND
Logic
TGO
TGH
TGL
E Beam
F Beam
F
E
+
-
+
-
Arrary
Controlled by
5bit Switch
-
GLI
GHI
Vac
INTAT
To Micom
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Tracking Gain Control
∑
In balance control, 16 bit data transmission changes the switch mode by 1step from $811F
$8100, and ,
after adjustment, a separate latch pulse is not needed.
∑
The H duty check reference of TGL output of Trcnt output is above 0.1ms.
∑
The most appropriate method is chosen among the 4 control modes listed besides the ones above for control.
∑
Among the 12 bit data, the tracking balance window setting level can be selected from
0: +250mV (TGL) - +200mV (TGH), 1: +150mV (TGL) - +300mV (TGH) through the D3 bit.
∑
When the tracking gain adjust is complete, it enters the tracking & sled servo loop and TOC read.
Window Input
TGH (pin19)
TGL (pin18)
GHI
GLI
Vac
1
2
3
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Gain Control Flowchart 1
In gain control, the micom command from $811F
$8100 successively executes the down command and goes
status 1 to 2
3. If it reaches status 2, control ends.
∑
Gain Control Method 1
The micom monitors the TGL output of ISTAT and, when it detects the output's H duty (0.1ms), ends. The
window comparator level at this time is +150mV - +300mV.
∑
Gain Control Method 2
The micom monitors the TGH output of ISTAT and, when it detects the output's H duty (0.1ms), ends. The
window comparator level at this time is +150mV - +300mV.
∑
Gain Control Method 3
The micom monitors the TGL output of ISTAT and, when it detects the output's H duty (0.1ms), ends. It
changes the window comparator level at this time from +150mV - +300mV to +250mV - +200mV. Then it re-
monitors the TGL output of ISTAT, and, if it detects the output's H duty (0.1ms), control ends. If it latches the
middle command between the previous micom command value and latter command value, +200mV gain
control becomes possible.
∑
Gain Control Method 4
The micom monitors the TGL output of ISTAT and, when it detects the output's H duty (0.1ms), it down the
micom command by 1 and control ends. The window comparator level at this time is +150mV - +300mV.
∑
Gain Control Method 5
Gain control is set to 32 steps in total and gain window is set to +250mV.
(That is, start from $811F and head toward $8110) after setting $811F, it monitors the ISTAT to check whether
five ISTAT were detected for 10ms. If yes, control ends, and, if not, it as gain switch is lowered by 1 step.
The above process is repeated three times and the average value obtained from this repetition set as the gain
control switch.
Start
- Environment Setting
Focus on $08
Spindle on, CLV-P mode
Tracking off $20
Sled off
Gain Window
Level Setting
ISTAT = H?
End ADJ.
G0 to G4
Switch Control
Gain ADJ. Start $83F
Separate environment setting is
not required when controlling the
gain after controlling balance
+150mV - +300mV $84 1XXX
+250mV - +200mV $84 0XXX
YES
NO
32 TEP reduction of gain
ADJ. Switch from $811F -> $8100
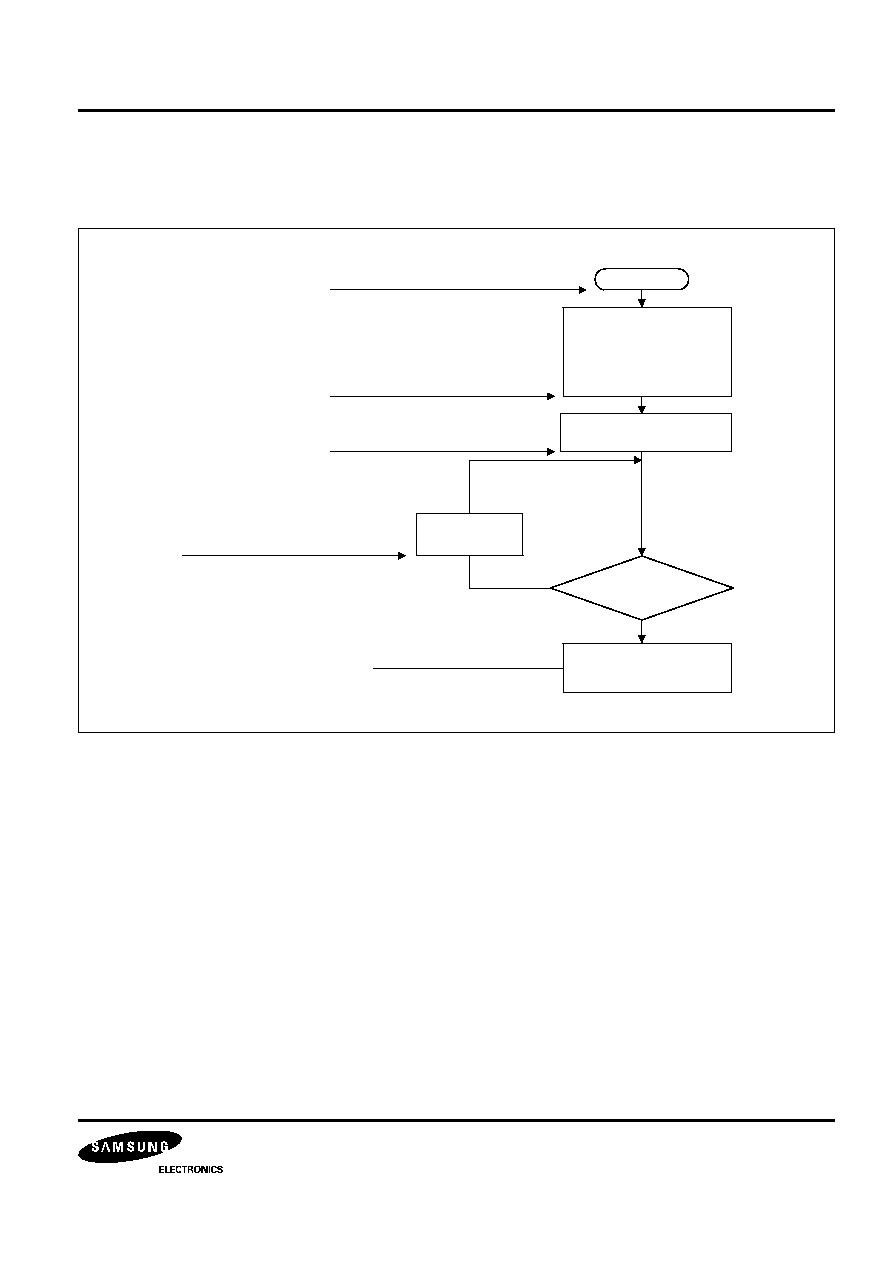
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Gain Control Flowchart 2
Start
- Environment Setting
Focus on $08
Spindle on, CLV-P mode
Tracking off $20
Sled off
Balance Window
Level Setting
Are there 5 ISTAT
for 100ms?
End ADJ.
G0 to G4
Switch Control
Gain ADJ. Start $811F
Separate environment setting is
not required when controlling the
gain after controlling balance
+150mV - +300mV $84 1XXX
+250mV - +200mV $84 0XXX
YES
NO
32 TEP reduction of gain
ADJ. Switch from $811F -> $8110
Gain switch seting after
averaging the 3 repeats
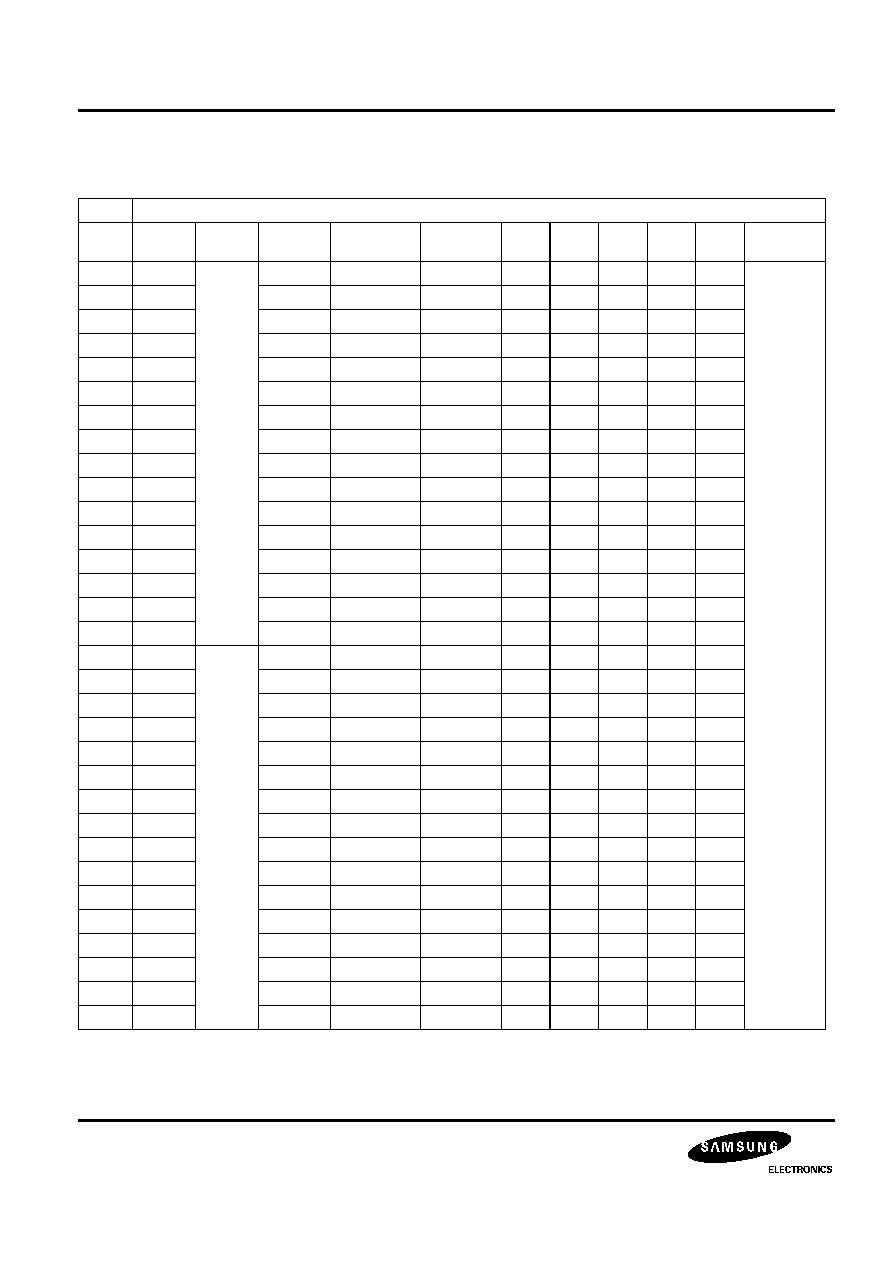
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Tracking Gain Equivalent Resistance
Tracking Gain
Data
TERR
Gain
TERR
Gain
5Bit Gain
Ratio
Proportional
Resistance
Combined
Resistance
7.5K
7.5K
3.75K
2.0K
1K
Comments
$811F
0.096
96K/32K
0.032
15.0K
0.5K
1
1
1
1
1
The gain at
$811E
0.272
x 3.0
0.090
15.0K
1.5K
1
1
1
1
0
ratio is
$811D
0.428
0.142
15.0K
2.5K
1
1
1
0
1
calculated in
$811C
0.567
0.189
15.0K
3.5K
1
1
1
0
0
the TSIO
$811B
0.662
0.220
15.0K
4.25K
1
1
0
1
1
terminal.
$811A
0.777
0.259
15.0K
5.25K
1
1
0
1
0
$8119
0.882
0.294
15.0K
6.25K
1
1
0
0
1
$8118
0.977
0.325
15.0K
7.25K
1
1
0
0
0
$8117
1.043
0.347
15.0K
8.0K
1
0
1
1
1
$8116
1.144
0.381
15.0K
9.25K
1
0
1
1
0
$8115
1.200
0.400
15.0K
10.0K
1
0
1
0
1
$8114
1.269
0.423
15.0K
11.0K
1
0
1
0
0
$8113
1.317
0.439
15.0K
11.75K
1
0
0
1
1
$8112
1.378
0.459
15.0K
12.75K
1
0
0
1
0
$8111
1.434
0.478
15.0K
13.75K
1
0
0
0
1
$8110
1.487
0.495
15.0K
14.75K
1
0
0
0
0
$810F
1.548
0.516
7.5K
8.0K
0
1
1
1
1
$810E
1.636
0.545
7.5K
9.0K
0
1
1
1
0
$810D
1.714
0.571
7.5K
10.0K
0
1
1
0
1
$810C
1.783
0.594
7.5K
11.0K
0
1
1
0
0
$810B
1.860
0.620
7.5K
12.25K
0
1
0
1
1
$810A
1.888
0.629
7.5K
12.75K
0
1
0
1
0
$8109
1.941
0.647
7.5K
13.75K
0
1
0
0
1
$8108
1.988
0.662
7.5K
14.75K
0
1
0
0
0
$8107
2.021
0.673
7.5K
15.50K
0
0
1
1
1
$8106
2.0625
0.6875
7.5K
16.50K
0
0
1
1
0
$8105
2.100
0.700
7.5K
17.50K
0
0
1
0
1
$8104
2.134
0.711
7.5K
18.50K
0
0
1
0
0
$8103
2.158
0.719
7.5K
19.25K
0
0
0
1
1
$8102
2.189
0.729
7.5K
20.25K
0
0
0
1
0
$8101
2.217
0.739
7.5K
21.25K
0
0
0
0
1
$8100
2.243
0.747
7.5K
22.25K
0
0
0
0
0

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
EXAMPLE OF SYSTAM CONTROL
Power ON
Disc Tray Check
Loading
Focus Error Febias Automatic
Control Start $878
+$87F+$841 transfer
Replay
Disc Change
Focus Offset Cancel Automatic
Control Start
$08+$867+(200ms wait)+
$86F+$842 transfer
Tracking Offset Cancel Start
$8F1F -> $8F00 (ISTAT->H)
Laser Diode ON
LD ON, P-SUB $8560
Transmission
Limit SW Check
Focusing Auto-Focusing
$47 Transmission
Spindle Servo Loop ON
Tracking & Sled Loop OFF
$20 Transmission
Tracking Balance Adjust
Tracking Gain Adjust
TOC Read
OK?
Disc 8/12Cm Check
Play Back
100ms
ISTAT L -> H?
100ms
ISTAT L -> H?
TIME
100ms Maximum
100ms Maximum
2s Maximum
300ms Maximum
TRY Count
3?
Laser OFF
$850 Transmission
Display (no disc)
Standby
Laser OFF
$850 Transmission
Display (error),
TRAY Open
Standby
FAIL
NO
YES
PASS
NO
YES
CLOSE
OPEN
Focus OK?
FOK H?
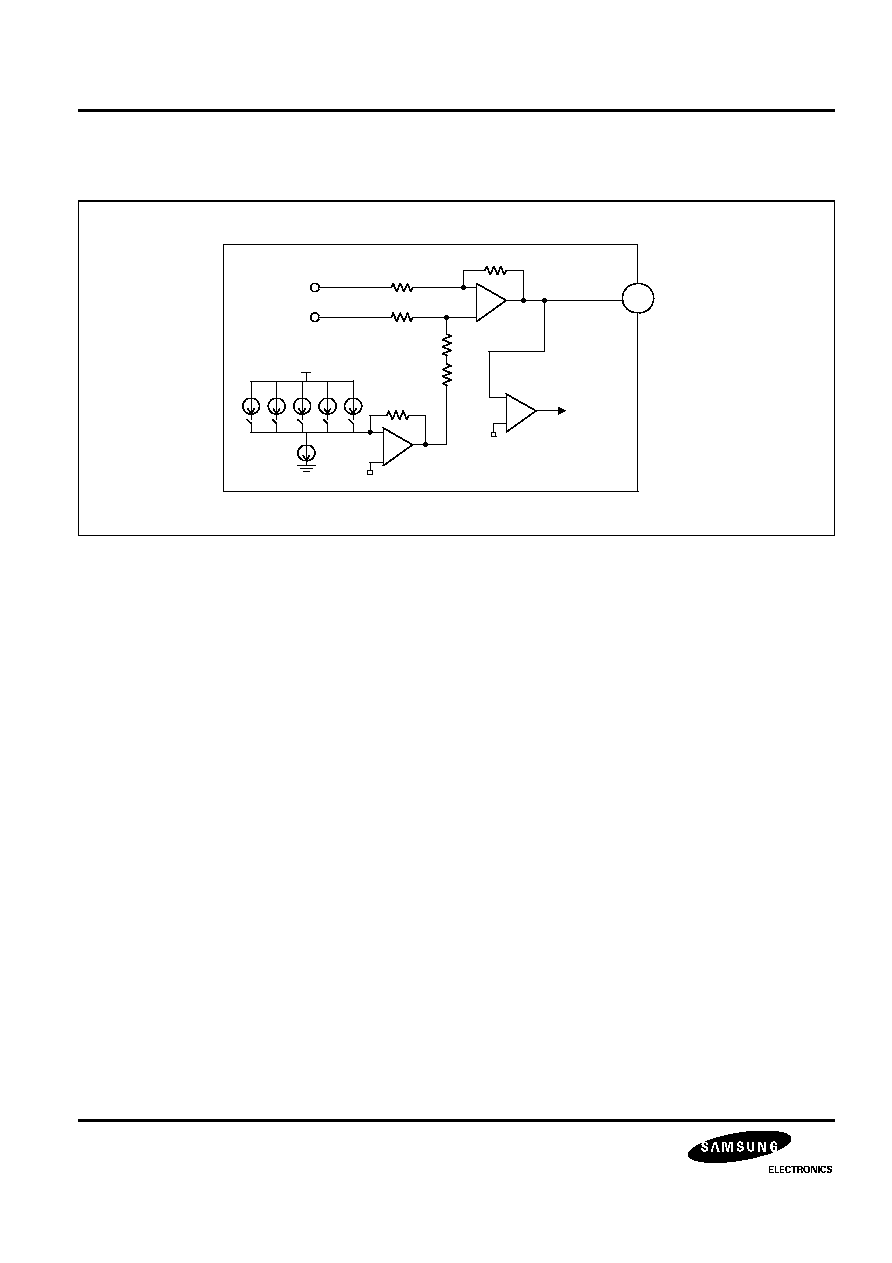
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
FEBIAS OFFSET CONTROL
Febias offset control starts when it receives the febias offset control start command $841X from the micom. Febias
offset control ends when the focus error amp output above 1/2 VCC after the focus output with 1/2 VCC at the
focus error amp final output terminal. The voltage per 1 step of the focus offset control is approximately 17mV. The
5bit resistance DAC changes from 112mV up to - 112mV in 1 step, after which 1/2 step, approximately -8mV offset,
is applied.
The offset dispersion after febias offset control exists between -8mV - +8mV. The time per 1 step is 2.5ms; for 5
bits and total of 32 steps, the maximum required time is 128ms.
Hardware performs the control from minus offset to plus offset. The febias offset re-control is when 4bit DAC is
reset by $878. And Reset can be canceled only when the $87F applied D2 bit is changed from 0
1. The Febias
DAC latch block reset for electrostatics and system operation is reset by Micom DATA and not by RESET terminal,
the system reset.
X1 X2
X4
X8
3K
+
-
+
-
160K
4K
32K
32
+
-
fcmpo
164K
vb
va
11
FSI
vc
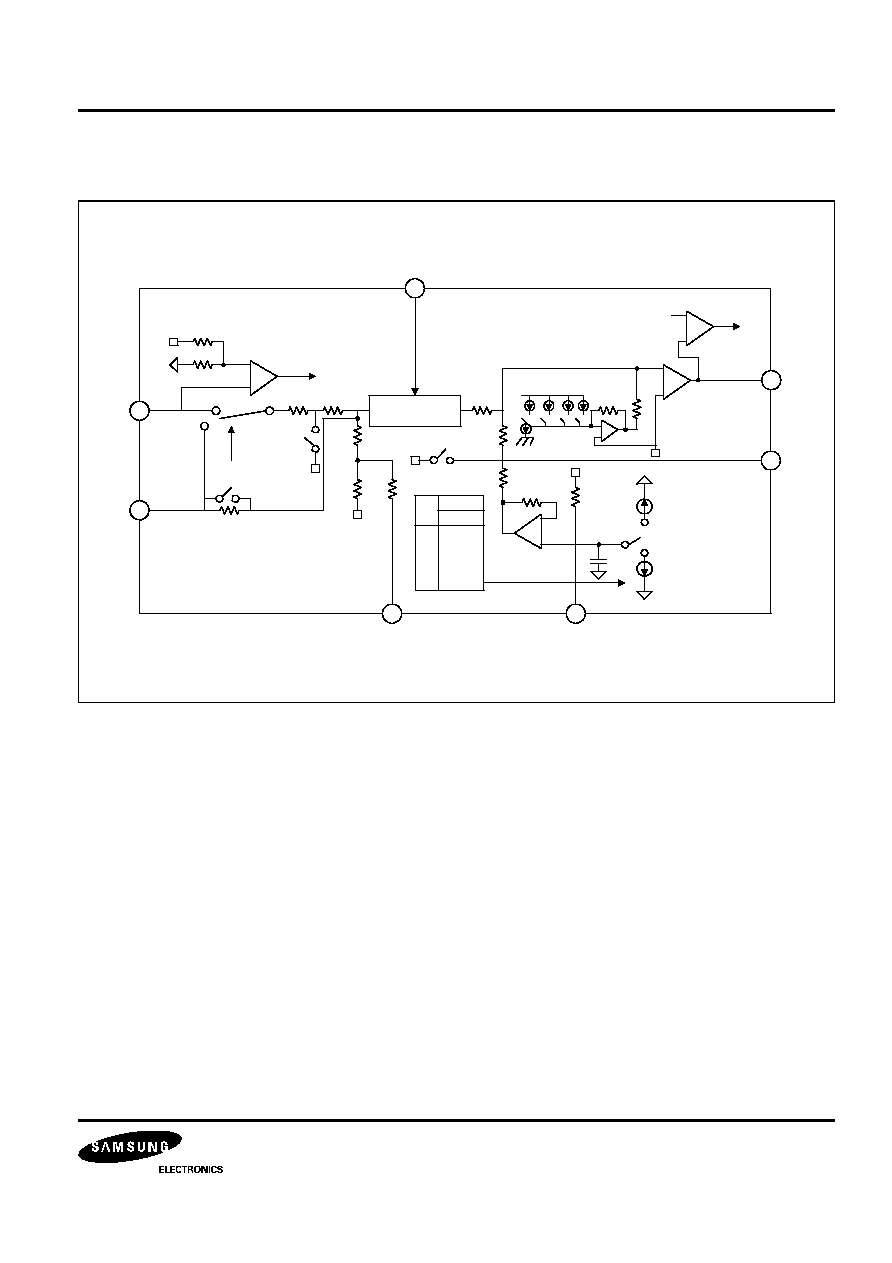
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
FOCUS OFFSET CONTROL
Focus Offset control starts when it receives the Focus Offset control start command $842X from micom. Focus
Offset control ends when the focus error amp output below 1/2VCC after the focus output with 1/2 VCC at the focus
error amp final output terminal. The voltage per 1 step of the focus offset control is approximately 40mV. The 4 bit
resistance DAC changes from 320mV up to -320mV in 1 step, after which 1/2 step, approximately -20ms offset, is
applied. The offset dispersion after Focus offset control exists between -20mV - +20mV. The Febias Offset can be
changed in 10mV step within the micom's
±
100mV range after focus offset control. The required per 1 step is
2.5ms; for 4 bits and total of 16 steps, the maximum required time is 128ms.
For focus offset readjust, 4-bit DAC is reset by $867, and reset can be canceled only when the $86FX applied D3
bit is changed from 0
1. The Febias DAC latch block reset for electrostatics and operation error is reset by
micom DATA and not by RESET terminal, the system reset.
31
+
-
Focus Phase
Compensation
-
+
PS
4
3
0
0
1
1
0
1
0
1
X1
X2
X3
X4
+
-
+
-
+
-
30
7
9
10
11
8
3.6K
60K
FZC
I
DFCTI
48K
FS4B
FS3
580K
FGD
FSI
20K
470K
40K
FS2B
82K
40K
10K
50K
5K
FS1
FSET
FLB
FRCH
FEM
FEO
to Digital
VC
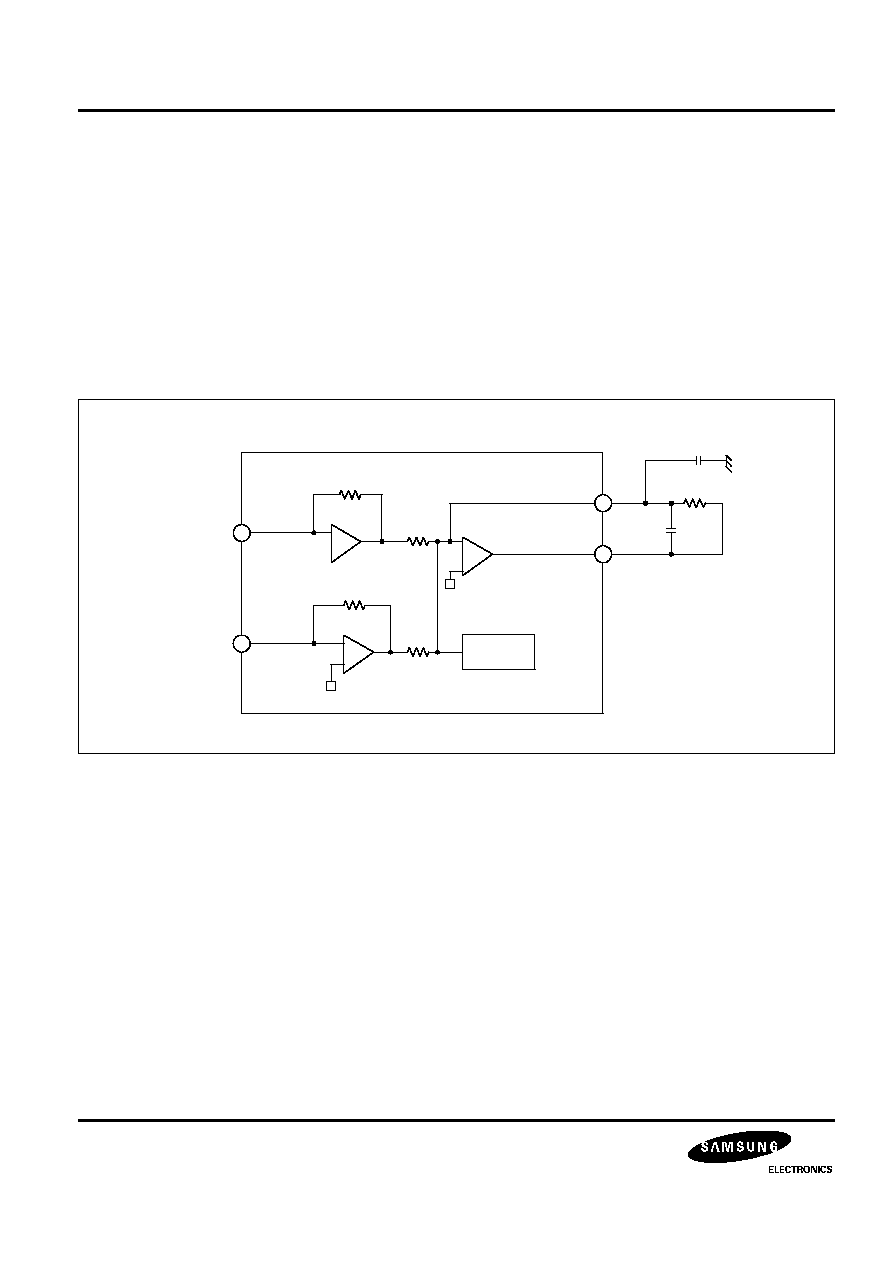
S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
FEBIAS OFFSET SETTING
Febias Control
The FEBIAS offset control is automatically controlled to 0mV and can be controlled to
±
200mV. After the focus
offset automatic control ends after FEBIAS offset automatic control, the command sets the internal positive and
negative offsets in 20mV units to the micom.
RF SUMMING AMPLIFIER APPICATION
The RF I/V AMP can be controlled to 0.5X 8Step up to 1X - 4X CD-R and CDRW. The information related to CDR,
CDRW disc detector is output as RFO level through the ISTAT. The RFO offset control is installed to prevent RF
level clipping during low RFO voltage.
39
PDAC
RFM
PDBD
+
-
+
-
RF Offset
Control
RFO
1
CDRW Gain Sel
10K
CDRW Gain Sel
IV AMP
10K
22K
2pF
+
-
2
33pF
40
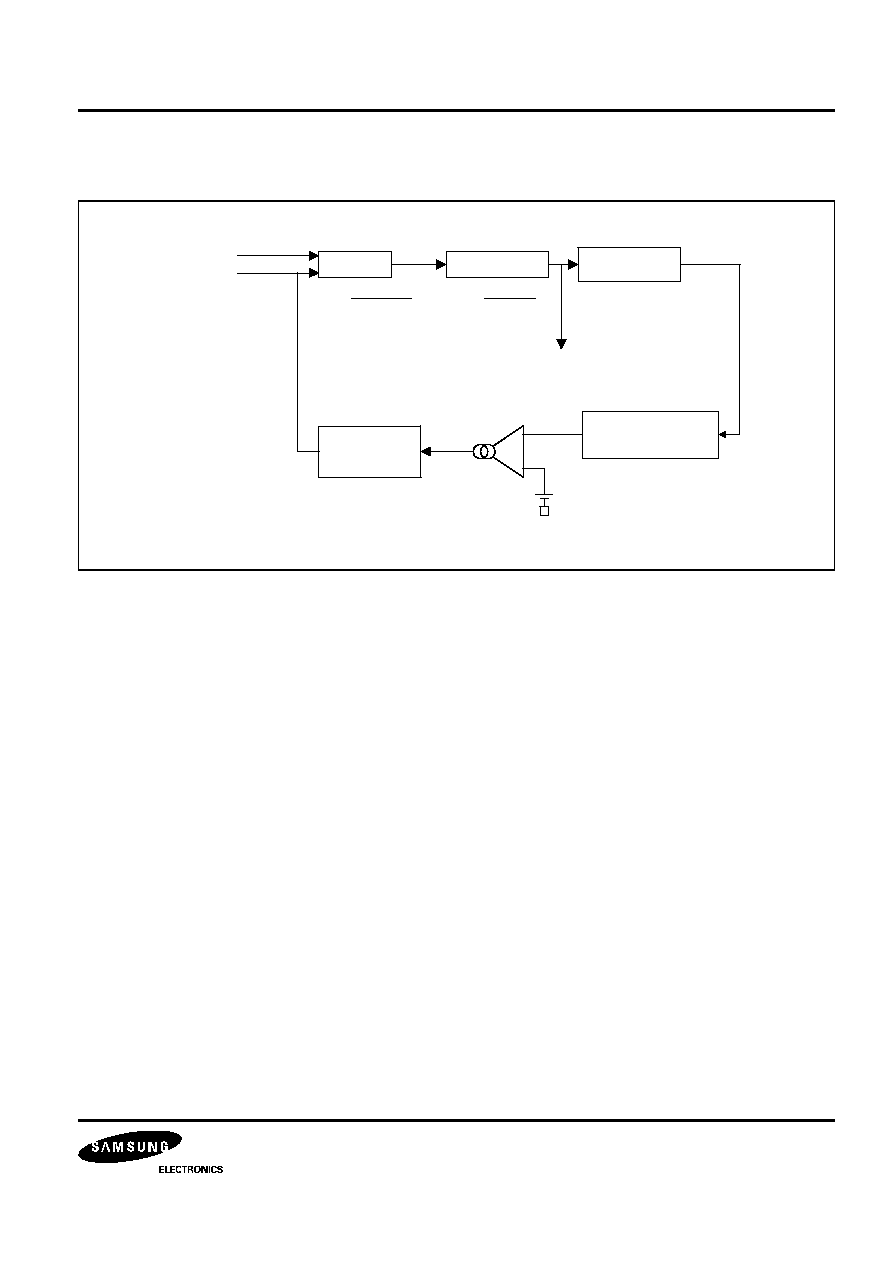
RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
RF EQUALIZE & AGC
The modulator output, which had the Veqc's Tanh term multiplied at the input, passes through the approximately
3X gain terminal to the ARF pad. On the one hand, the output is - rectified as it passes through the HPF having
50kHz pole frequency and follows the peak envelope the RF level. At this time, the pole frequency of the HPF is
set to 50kHz so that the 3T - 11T component can pass through without attenuation. The RF level peak value is
integrated at the 's CAP node after wave rectification. If this peak value is less than the already set voltage
comparison, sinking current is output and, if not, sourcing current is output. The maximum peak value at this time is
10uA, which is I/V converted and applied as the modulator control voltage. Under the sinking condition, the Vcagc
increases to 1outx10K and multiplied by Tanh (1-X); the sourcing condition, Vcagc decreases to Iout x10K and
multiplied by Tanh (1+X), where X is (Veqc/2Vt).
Overall, after detecting the 3T and 11T levels by full-wave rectification, it is compared to Tanh using the modulator
and multiplied to the gain to realize the wave-form equalize. The above is related to the AGC concept, which
means that a specific RF level is always taken
Modulator
3x Gain AMP
HPF
(3dB: 50kHz)
I/V Converter
Control Range
I * 10K
Full Wave Rectifier
(RF Peak Envelope)
Iout = 2gm (Vid/2)
= gm * Vid
= (Iref) * (Vid/Vt)
= Iref * (Vp-Vn)/Vt
if Vn > Vp
Vcagc Increment (tanh (1-X))
if Vn < Vp
Vcagc Decrement (tanh (1+X))
tanh
±
0.1 =
±
0.1
tanh
±
0.5 =
±
0.462
tanh
±
0.1 =
±
0.7
tanh
±
2.0 =
±
0.964
Vref
Vp
Vn
V = I/C (115pF)
EQO-AGC Output
Vin (t)
Vcagc (t)
Vo (t)
+
-
Vin(t) = 0.73x (RFO)
Vo(t) =
R6 (5.5K)
R5 (7.5K)
Vin (t) tanh
(
2Vt
Vcagc(t)
)

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
OTHER BLOCK
Tracking Error Amplifier
The side spot photo diode current input to terminals E and F passes through the E Loop I-V and F Loop I-V Amps.
It is then converted into voltage, in order to gain the difference signal in the Tracking Error Amp. This portion can
perform 0.5X 8 step gain control up to 1X-4X for CD-R and CD-RW. Has the micom programming, which controls
the balance by controlling gain at the E terminal and controls the gain at TEIO.
Focus OK circuit
Focus Ok circuit makes the timing window, which turns on the focus in the focus search state by "output" FOK as L
H if the RF level is above the reference after the difference in DC between and RFO terminals extracted and
compared to the reference DC value.
13
42
41
34
PDE
PDF
TEIO
+
-
CD-RW, CD
Gain Sel
CD-RW, CD
Gain Sel
35
LPFT
Win Comp
Win Comp
B_REF_CN
G_REF_CNTR
Gain_UP/D
Gain < 4:
BAL < 4:0 >
16R 8R
2R
4R
R
3
2
EQI
RFO
+
-
+
-
40K
40K
40K
57K
90K
VC + 0.625V
FOKB

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
MIRROR CIRCUIT
After amplifying the RFI signal, the mirror signal peak and bottom holds.
Peak hold can follow even at defect type
traverse and bottom hold counts the tracks by following RF envelop at a
jump. The mirror output is "L" on the disc track and "H" between tracks. Even if above 1.4 ms is detected, it outputs
"H".
EFM Comparator
The EFM Comparator makes the Rf signal into a secondary signal. The Asymmetry generated by a fault during
Disc production cannot be eliminated by only AC coupling, so control the standard voltage of the EFM Comparator
to eliminate it.
3
EQI
+
-
17K
19K
38K
Peak and
Bottom
Hold
+
-
+
-
+
-
44 MCP
MIRROR
80K
96K
17K
1.5K
5
+
-
40K
EFMI
- RF Double Asymmetry Conection
- EFMI Peak Prevention System
- Asymmetry Hold System
22 ASY
21 EFM
x5

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Defect Circuit
After RFO signal inversion, bottom hold is carried out using only 2. Except, the bottom hold of holds the coupling
level just before the coupling. Differentiate this with the coupling, then level shift it. Compare the signals to either
direction to generate the defect detect signal.
APC Circuit
When the laser diode operates in electrostatic field, the laser output temperature highly negative so the monitor
photo diode controls the laser output at a fixed level. The laser control system is installed to absorb the deviation of
the disc reflection. System controls the laser power using the tracking summing signal of the side beam to a fixed
laser output.
2
RFO
+
-
37.5K
75K
75K
Bottom
Envelope
+
-
45
DCC1
DEFECT
Bottom
Envelope
43
DCB
46
DCC0
28K
VC
VC+0.6254V
43K
38
PD
37 LD
+
-
+
-
Laser
Control
LDON
5K
5K
55K
0.25K
55K
5K
55K

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Center Voltage Generation Circuit
The center voltage is made by using the resistance divide.
RF Equalize Circuit
The AGC block, which maintains the RF peak to peak level, possess the 3T gain boost. It detects the RF envelop
and compares it to the reference voltage to control the gain.
Receives the RF output to stabilize the RF level to 1Vpeak-peak, which is applied to the EFM slice input.
ATSC
The detection circuit for shock tracking gain up is composed of the window comparator.
+
-
30K
VREF
47
30K
3
EQI
48
EQC
Equalize
VCA
4
EQO
36
ATSC
BPF
+
-
+
-
Tracking
Gain UP

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Focus Servo
If the focus servo loop phase has been compensated, the focus servo loop mutts if the defect is. The focus error
signal at this time is differentiated by the 0.1uF capacitor to be connected to the terminal and the 470kohms
resistance and is output es through the servo loop. Therefore, the focus output is held to value before the defect
error during defect. The FSET terminal changes the at which the focus loop compensation is at its maximum.
If the resistance to VDDA connected to the terminal, the phase compensation frequency is changed 1.2kHz below,
and GND connected to the terminal, the frequency is changed 1.2kHz above.
During focus search, Fs4 turns on to cutoff the error signal and to output the focus search signal through the FEO.
When the focus is on, FS2 turns on, and the focus error signal input through the FSI is output through the loop to
the output pin.
31
+
-
Focus Phase
Compensation
-
+
PS
4
3
0
0
1
1
0
1
0
1
X1
X2
X3
X4
+
-
+
-
+
-
30
7
9
10
11
18
3.6K
60K
FZC
I
DFCTI
48K
FS4B
FS3
580K
FGD
FSI
20K
470K
40K
FS2B
82K
40K
10K
50K
5K
FS1
FSET
FLB
FRCH
FEM
FEO
to Digital
VC

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Tracking Servo
The tracking servo phase compensate the tracking servo loop and differentiates the tracking error signal, after
which it outputs the signal through the servo loop. TGU exchanges the tracking gain up/down time constant.
As in the focus loop, the phase compensation peak frequency is varied by the Fset terminal. If the resistance
connected to the FSET terminal changes, the OP Amp dynamic range offeset changes also.
The TM7 switch is a brake switch which turns the tracking loop on/off when the actuator is unstable after a jump.
After the servo jumps 10 tracks, the servo circuit leaves the linear range and the actuator sometimes pursues the
unstable track, preventing unnecessary jumps from undesired tracking errors. As the terminal which controls the
tracking servo loop's high frequency gain, the Tgu terminal controls the desired frequency range of the gain
through the external cap.
29
8
34
TEIO
FSET
90K
TEO
Tracking
Phase
Compensation
12
TGU
TLPFI
DFCTI
680K
+
-
28 TEM
10K
TM7
68P
F
680K
TG1B
10K
110K
82K
TM1
470K
TG2B
TM4
TM3

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
Sled Servo
This servo differentiates the tracking servo and moves the pick-up. It also outputs the sled kick voltage to make a
track jump in the sled axis during track movement.
Spindle Servo & Low Pass Filter
The 200Hz LPF, composed of an external 20kohms resistance and 0.33uF cap, eliminiates the high frequency
carrier component.
27
+
-
25 SLM
TM6
TM7
26 SLO
TM2
PS
2
1
0
0
1
1
0
1
0
1
X1
X2
X3
X4
SLP
+
-
23 SPM
24 SP0
100K
+
-
8
FSET
18
CLVI
50K
FVCO
Double Speed
30K
30K
220K
220K

RF AMP & SERVO SIGNAL PROCESSOR
S1L9226X
5
PRELIMINARY
Mirror & Cpeak Mute (use only for tracking mute )
Used against ABEX-725A, this circuit processes the tracking mutting when mirror is detected.
(No recommend) the tracking mutting when EFM duty is above 22T after it is checked.
Mute does not operate in the following four cases.
∑
Micom tracking gain up command transmission (TG1, TG2 = 1)
∑
Anti-shock detection (ATSC)
∑
Lock falls to L
∑
Defect detection
TRCNT Output
TRCNT is output of mirror and TZC.
Mirror is the track movement detection output of the main beam; TZC is the track movement detection output of the
side beam. TRCNT receives these two inputs to determine whether the present pick-up is moving from the inside
to the outside or from the outside to the inside. It is used at $17 tracking brake operation.
MIRROR
TZC
Inverter Delay
TZC EDGE
Detection.
D Q
CK
Trcnt Output
TZC Rising, Falling
EDGE Mirror Output.

S1L9226X
RF AMP & SERVO SIGNAL PROCESSOR
4
PRELIMINARY
NOTES