 | –≠–Ľ–Ķ–ļ—ā—Ä–ĺ–Ĺ–Ĺ—č–Ļ –ļ–ĺ–ľ–Ņ–ĺ–Ĺ–Ķ–Ĺ—ā: CXA1372BS | –°–ļ–į—á–į—ā—Ć:  PDF PDF  ZIP ZIP |
Description
The CXA1372BQ/BS is a bipolar IC developed for
RF signal processing (focus OK, mirror, defect
detection, EFM comparator) and various servo
control.
Features
∑ Dual Ī5V and single 5V power supplies
∑ Low power consumption
∑ Fewer external parts
∑ Disc defect countermeasure circuit
∑ Fully compatible with the CXA1182 for microcomputer
software
Functions
∑ Auto asymmetry control
∑ Focus OK detection circuit
∑ Mirror detection circuit
∑ Defect detection, countermeasure circuit
∑ EFM comparator
∑ Focus servo control
∑ Tracking servo control
∑ Sled servo control
Structure
Bipolar silicon monolithic IC
Absolute Maximum Ratings (Ta = 25įC)
∑ Supply voltage
V
CC
≠ V
EE
12
V
∑ Operating temperature
Topr
≠20 to +75
įC
∑ Storage temperature
Tstg
≠65 to +150
įC
∑ Allowable power dissipation
P
D
457 (CXA1372BQ)
mW
833 (CXA1372BS)
mW
Recommended Operating Conditions
V
CC
≠ V
EE
3.6 to 11
V
V
CC
≠ D
GND
3.6 to 5.5
V
≠ 1 ≠
CXA1372BQ/BS
E95927A67-PS
RF Signal Processing Servo Amplifier for CD Player
Sony reserves the right to change products and specifications without prior notice. This information does not convey any license by
any implication or otherwise under any patents or other right. Application circuits shown, if any, are typical examples illustrating the
operation of the devices. Sony cannot assume responsibility for any problems arising out of the use of these circuits.
CXA1372BQ
48 pin QFP (Plastic)
CXA1372BS
48 pin SDIP (Plastic)
≠ 2 ≠
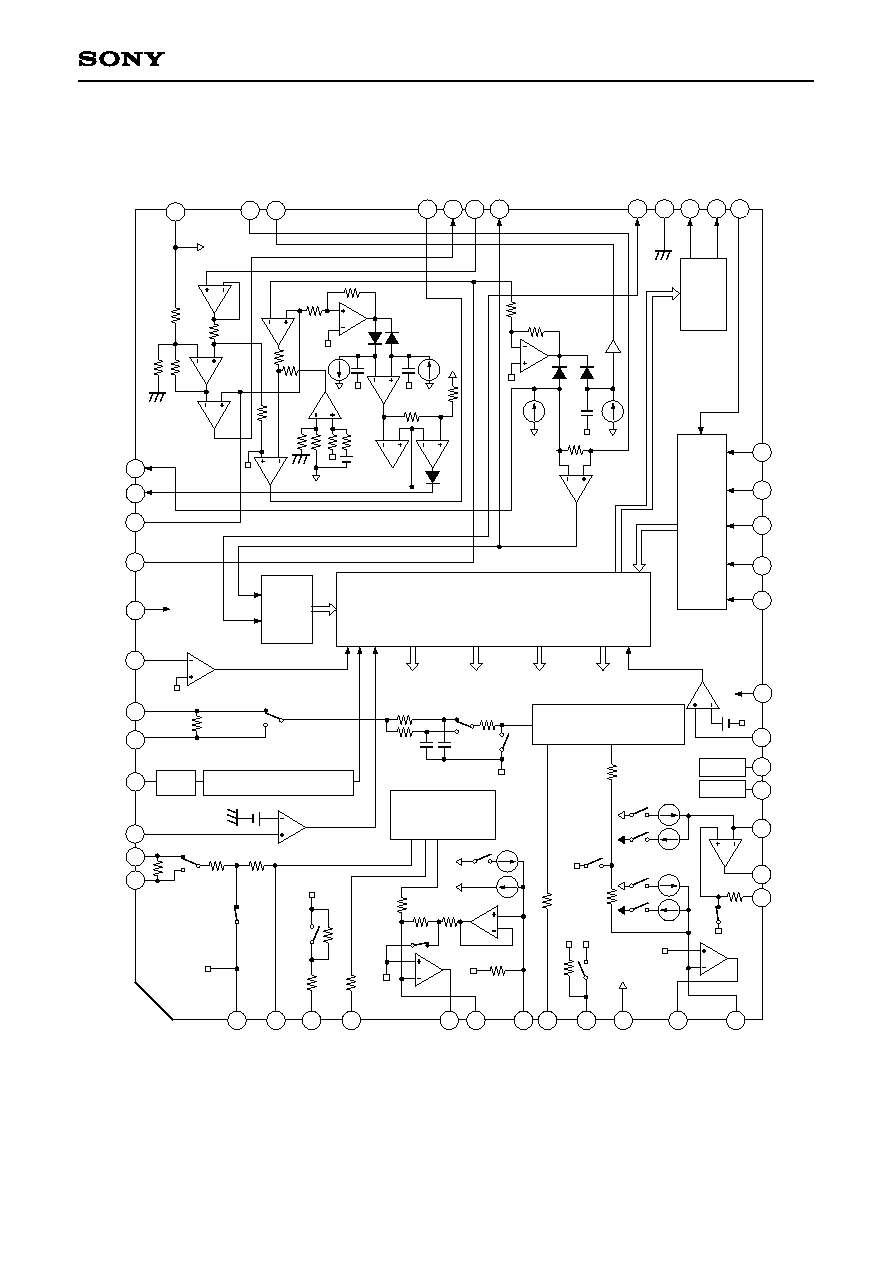
CXA1372BQ/BS
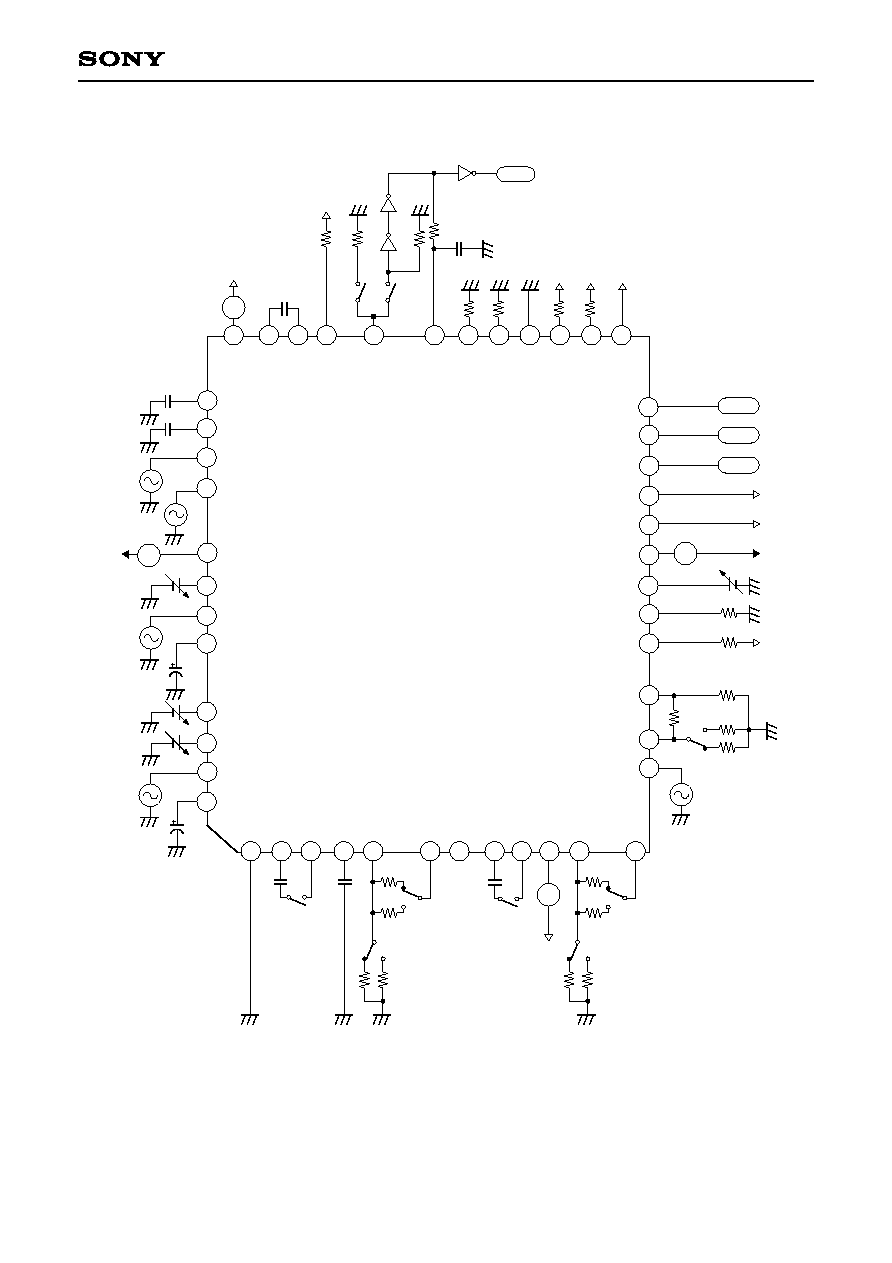
Block Diagram
35
34
30
31
32
33
25
26
27
28
29
∑ IIL
∑ TTL
20
21
22
23
24
19
13
14
15
16
17
18
∑ I SET
∑ F SET
TM6
TM5
TM4
TM3
TM7
12
11
10
9
8
7
6
5
4
3
2
1
FS3
FS2
FS1
∑ FOCUS
PHASE
COMPENSATION
48
47
46
45
44
43
42
41
40
39
37
DFCT
∑ BPF
∑ WINDOW COMPARATOR
DFCT
TG1
∑ TRACKING
PHASE COMPENSATION
∑ IIL DATA REGISTER
∑ OUTPUT DECODER
∑ INPUT SHIFT REGISTER
∑ ADDRESS DECODER
∑ FS1 to 4
∑ TG1 to 2
∑ TM1 to 7
∑ PS1 to 3
∑ TTL
∑ IIL
DVcc
CC2
CC1
FOK
EFM
ASY
DFCT
MIRR
DGND
SENS
C. OUT
XRST
DATA
XLT
CLK
LOCK
DIRC
AV
EE
SSTOP
ISET
FSET
SL≠
SLO
SL+
TA≠
TAO
AV
CC
TG2
TGU
SRCH
FE≠
FEO
FLB
FS3
FGD
VC
FDFCT
FE
FZC
ATSC
TDFCT
TE
TZC
DV
EE
RFO
RFI
CP
CB
36
TM1
FS4
TG2
TM2
∑ TTL
∑ IIL
38

≠ 3 ≠
CXA1372BQ/BS
Pin Configuration
CXA1372BQ
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
40
39
38
37
36
35
34
31
32
33
41
42
43
44
45
46
47
48
1
CB
CP
RFI
RFO
DV
EE
TZC
TE
TDFCT
ATSC
FZC
FE
FDFCT
DATA
XLT
CLK
LOCK
DIRC
AV
EE
SSTOP
ISET
FSET
SL≠
SLO
SL+
VC
FGD
FS3
FLB
FEO
FE≠
SRCH
TGU
TG2
AVcc
TAO
TA≠
DVcc
CC2
CC1
FOK
EFM
ASY
DFCT
MIRR
DGND
SENS
C. OUT
XRST
CXA1372BQ
CXA1372BS
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
40
39
38
37
36
35
34
31
32
33
41
42
43
44
45
46
47
48
1
TE
TDFCT
ATSC
TZC
FE
FDFCT
VC
FGD
FS3
FLB
FEO
FE≠
SRCH
TGU
TG2
AVcc
TAO
TA≠
SL+
SLO
SL≠
FSET
ISET
SSTOP
TZC
DV
EE
RFO
RFI
CP
CB
DVcc
CC2
CC1
FOK
EFM
ASY
DFCT
MIRR
DGND
SENS
C. OUT
XRST
DATA
XLT
CLK
LOCK
DIRC
AV
EE
CXA1372BS

≠ 4 ≠
CXA1372BQ/BS
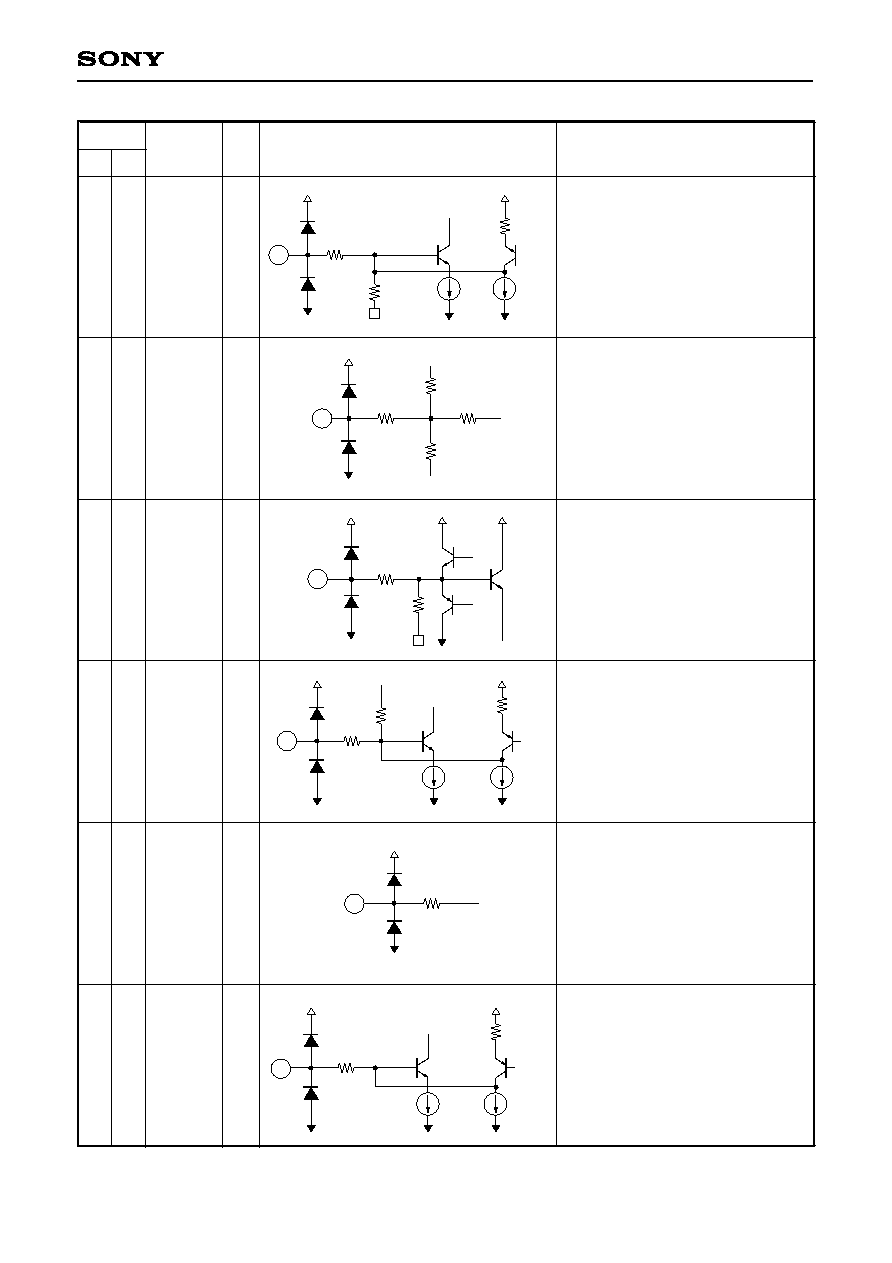
Pin Description
Pin No.
Symbol
I/O
Equivalent circuit
Description
VC
I
Center voltage input.
For dual power supplies: GND
For single power supply:
(V
CC
+ GND)/2
FGD
I
Connects a capacitor between this
pin and Pin 3 to cut high-frequency
gain.
FS3
I
The high-frequency gain of the
focus servo is switched through FS3
ON and OFF.
FLB
I
External time constant to boost the
low frequency of the focus servo.
FEO
O
TAO
O
SLO
O
Focus drive output.
Tracking drive output.
Sled drive output.
1
2
3
4
5
11
14
6
7
8
9
10
11
17
20
12
FE≠
I
Inverted input for focus amplifier.
147
40k
90k
2.5ĶA
6
5
11
14
250ĶA
2.5ĶA
40k
4
2
Vcc
V
EE
147
48k
130k
20ĶA
3
46k
580k
Q
S
≠ 5 ≠
CXA1372BQ/BS
External time constant for forming
the focus search waveforms.
External time constant for selecting
the tracking high-frequency gain.
External time constant for selecting
the tracking high-frequency gain.
Inverted input for tracking amplifier.
Non-inverted input for sled amplifier.
Inverted input for sled amplifier.
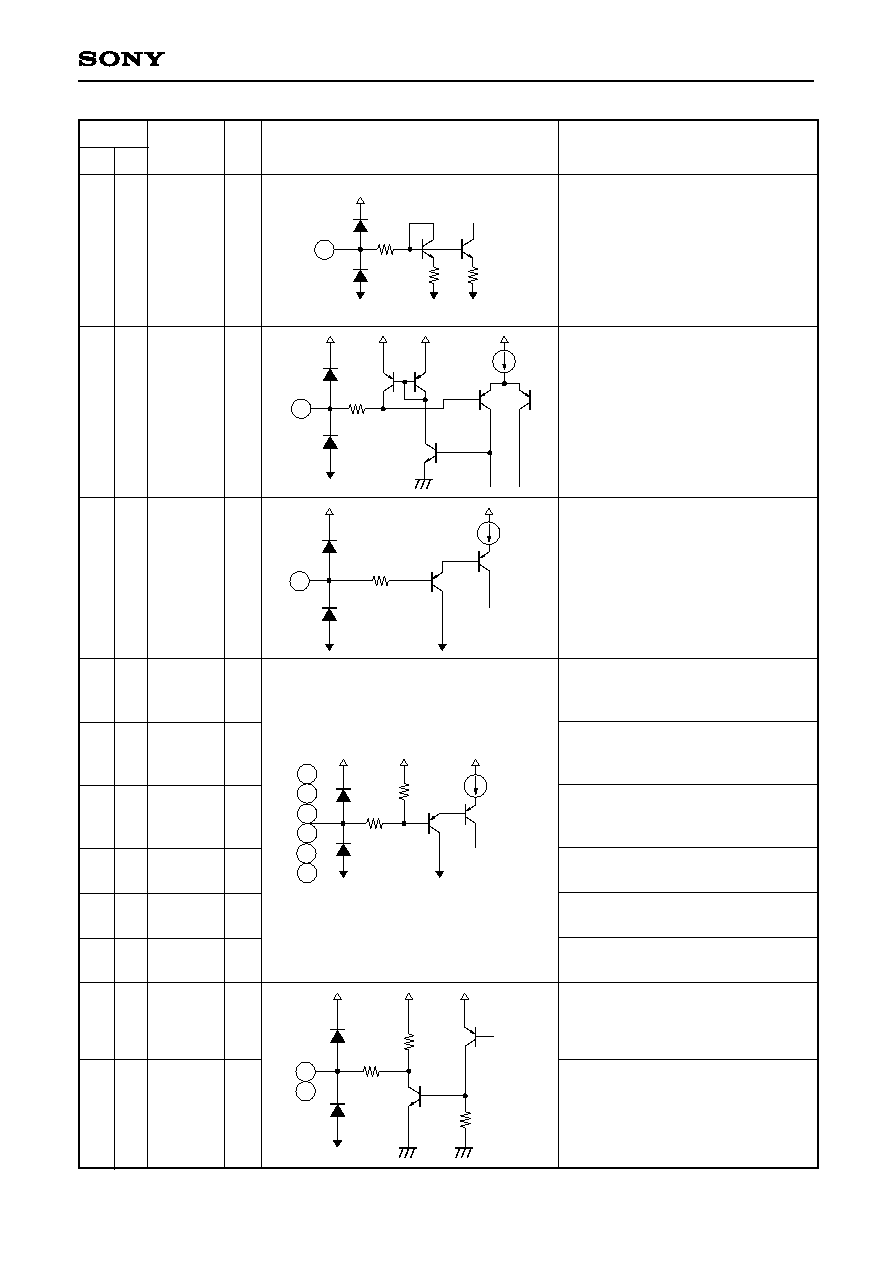
Pin No.
Symbol
I/O
Equivalent circuit
Description
SRCH
I
TGU
I
TG2
I
TA≠
I
SL+
I
13
14
15
18
19
21
7
8
9
12
13
15
SL≠
I
147
22ĶA
3ĶA
15
10k
13
147
90k
11ĶA
3ĶA
12
147
50k
11ĶA
3.5ĶA
7
20k
110k
82k
8
470k
147
9
Q
S
≠ 6 ≠
CXA1372BQ/BS
Serial data transfer clock input from
CPU. (no pull-up resistor)
Serial data input from CPU.
(no pull-up resistor)
Reset input, reset at "Low".
(no pull-up resistor)
Latch input from CPU.
(no pull-up resistor)
Track number count signal output.
Outputs FZC, AS, TZC and SSTOP
through command from CPU.
Sets the peak frequency of focus
tracking phase compensation.
Current is input to determine focus
search, track jump, and sled kick
level.
Used for 1-track jump. Contains a
47k
pull-up resistor.
At "Low" sled overrun prevention
circuit operates. Contains a 47k
pull-up resistor.
Limit SW ON/OFF signal detection
for disc innermost track detection.
Pin No.
Symbol
I/O
Equivalent circuit
Description
FSET
I
ISET
I
SSTOP
I
DIRC
I
LOCK
I
22
23
24
26
27
33
16
17
18
20
21
CLK
I
28
22
XLT
I
29
23
DATA
I
30
24
XRST
I
31
25
27
SENS
O
32
26
C. OUT
O
100k
147
20k
26
27
147
47k
15ĶA
20
21
22
23
24
25
147
15k
15k
16
147
17
147
7ĶA
18
Q
S

≠ 7 ≠
CXA1372BQ/BS
Input for DEFECT bottom hold
output with capacitance coupled.
Pin No.
Symbol
I/O
Equivalent circuit
Description
29
MIRR
O
38
CP
I
MIRR comparator output.
(DC voltage: 10k
load connected)
Connects MIRR hold capacitor.
Non-inverted input for MIRR
comparator.
34
CC1
O
35
CC2
I
30
DFCT
O
37
CB
I
31
ASY
I
Auto asymmetry control input.
32
EFM
O
EFM comparator output.
(DC voltage: 10k
load connected)
33
35
44
40
41
36
43
37
38
39
FOK
O
FOK comparator output.
(DC voltage: 10k
load connected)
147
33
20k
4.8k
Current source depending on
power supply
(V
CC
to D
GND
)
32
147
31
147
147
20k
29
38
147
37
147
35
147
34
147
30
DEFECT bottom hold output.
Connects DEFECT bottom hold
capacitor.
DEFECT comparator output.
(DC voltage: 10k
load connected)
Q
S

≠ 8 ≠
CXA1372BQ/BS
Input for RF summing amplifier
output with capacitance coupled.
Tracking zero-cross comparator
input.
Connects a capacitor for time
constant during defect.
Tracking error input.
Window comparator input for ATSC
detection.
Focus zero-cross comparator input.
Focus error input.
Connects a capacitor for time
constant during defect.
Pin No.
Symbol
I/O
Equivalent circuit
Description
RFI
I
TZC
I
TE
I
ATSC
I
FZC
I
45
48
1
3
4
5
39
RF summing amplifier output.
Check point of eye pattern.
RFO
O
46
40
42
43
TDFCT
I
2
44
45
46
47
FE
I
6
48
FDFCT
I
147
147
470k
47
48
147
46
1.2k
60k
330k
45
Vcc
V
EE
470k
47P
147
39
40
147
40k
42
147
75k
7ĶA
147
147
43
44
470k
Q
S

≠ 9 ≠
CXA1372BQ/BS
Electrical Characteristics
(Ta = 25įC, V
CC
= 2.5V, V
EE
= ≠2.5V, D. GND = ≠2.5V)
No.
Current consumption
Current consumption
O
O
O
O
O
O
S1
S2
S3
S4
S5
S6
S7
S8
S9
E1
E2
E3
E4
SD
Measure-
ment
point
Description of output
waveform and measurement
method
10, 36
19, 41
5
5
5
5
5
5
5
5
27
11
11
11
11
11
11
11
11
Unit
Max.
Typ.
Min.
Item
Symbol
Bias condition
SW condition
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
DC voltage gain
Feedthrough
Max. output voltage
Max. output voltage
Max. output voltage
Max. output voltage
Search output voltage
Search output voltage
FZC threshold value
DC voltage gain
Feedthrough
Max. output voltage
Max. output voltage
Max. output voltage
Max. output voltage
Jump output voltage
Jump output voltage
I
CC
I
EE
G
FEO
V
FEOF
V
FE01
V
FE02
V
FE03
V
FE04
V
SRCH1
V
SRCH2
V
FZC
G
TEO
V
TEOF
V
TE01
V
TE02
V
TE03
V
TE04
V
JUMP1
V
JUMP2
O
O
O
O
O
O
00
00
08
00
08
08
08
08
02
03
00
25
00
25
25
25
25
2C
28
8
≠24
18.0
2.0
1.2
≠640
360
39
11.6
2.0
1.2
≠640
360
19
≠17
21.0
50
13.3
27
≠8
24.0
≠35
≠2.0
≠1.2
≠360
640
61
17.6
≠39
≠2.0
≠1.2
≠360
640
mA
mA
dB
dB
V
V
V
V
mV
mV
mV
dB
dB
V
V
V
V
mV
mV
V
1
= 10Hz, 100mVp-p
G
FEO
= 20 log (Vout/Vin)
SG = 10kHz, 40mVp-p
Difference in gain when
SD = 00 and SD = 08
V
1
= 0.5V
DC
V
1
= ≠0.5V
DC
V
1
= 0.5V
DC
V
1
= ≠0.5V
DC
(V
CC
+ DGND)/2 = SENS
value when E4 is varied.
V
2
= 10Hz, ≠500mVp-p
G
TEO
= 20 log (Vout/Vin)
V
2
= 10kHz, 40mVp-p
Difference in gain when
SD = 00 and SD = 25
V
2
= ≠0.5V
DC
V
2
= 0.5V
DC
V
2
= ≠0.5V
DC
V
2
= 0.5V
DC
FOCUS SERVO
TRACKING SERVO

≠ 10 ≠
CXA1372BQ/BS
No.
O
O
S1
S2
S3
S4
S5
S6
S7
S8
S9
E1
E2
E3
E4
SD
Measure-
ment
point
Description of output
waveform and measurement
method
27
27
27
14
14
14
14
14
14
14
14
27
27
26
33
33
33
33
Unit
Max.
Typ.
Min.
Symbol
Bias condition
SW condition
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
10
10
20
25
00
25
25
25
25
23
22
30
≠45
7
≠20
50
2.0
2.0
≠750
450
≠40
≠400
2.2
45
≠26
26
0
≠25
≠356
≠7
45
20
≠34
≠2.0
≠2.0
≠450
750
≠10
≠2.0
≠2.0
≠330
≠1.8
mV
mV
mV
dB
dB
V
V
V
V
mV
mV
mV
V
V
mV
V
V
kHz
(V
CC
+ DGND)/2 = SENS
value when E3 is varied.
(V
CC
+ DGND)/2 = SENS
value when E2 is varied.
V
5
= 10Hz, 20mVp-p
Open loop gain
V
5
= 10kHz, 100mVp-p
Difference in gain when
SD = 00 and SD = 25
V
5
= 1.0V
DC
V
5
= ≠1.0V
DC
V
5
= 1.0V
DC
V
5
= ≠1.0V
DC
(V
CC
+ DGND)/2 = SENS
value when E1 is varied.
(V
CC
+ DGND)/2 = value
between Pins 39
and 40
when V
4
is varied.
V
4
= 1Vp-p ≠ 375mV
DC
FOK
ATSC threshold value
ATSC threshold value
TZC threshold value
DC voltage gain
Feedthrough
Max. output voltage
Max. output voltage
Max. output voltage
Max. output voltage
Kick output voltage
Kick output voltage
SSTOP threshold
value
SENS Low level
COUT Low level
FOK threshold value
High level voltage
Low level voltage
Max. operating frequency
V
ATSC1
V
ATSC2
V
TZC
G
SLO
V
SLOF
V
SL01
V
SL02
V
SL03
V
SL04
V
KICK1
V
KICK2
V
SSTOP
V
SENS
V
COUT
V
FOKT
V
FOKH
V
FOKL
F
FOK
SLED SERVO
TRACKING
SERVO
Item
≠ 11 ≠
CXA1372BQ/BS
S1
S2
S3
S4
S5
S6
S7
S8
S9
E1
E2
E3
E4
SD
Measure-
ment
point
Description of output
waveform and measurement
method
29
29
29
29
29
30
30
30
30
30
30
31
31
32
32
A
A
Unit
Max.
Typ.
Min.
Symbol
Bias condition
SW condition
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
High level voltage
Low level voltage
Max. operating
frequency
Min. input operating
voltage
Max. input operating
voltage
High level output
voltage
Low level output
voltage
Min. operating
frequency
Max. operating
frequency
Min. input operating
voltage
Max. input operating
voltage
Duty 1
Duty 2
High level output
voltage
Low level output
voltage
Min. input operating
voltage
Max. input operating
voltage
V
MIRH
V
MIRL
F
MIR
V
MIR1
V
MIR2
V
DFCTH
V
DFCTL
F
DFCT1
F
DFCT2
V
DFCT1
V
DFCT2
D
EFM1
D
EFM2
V
EFMH
V
EFML
V
EFM1
V
EFM2
O
O
O
O
O
O
1.8
30
1.8
1.8
2.5
1.8
≠50
0
1.2
1.8
0
50
≠2.0
0.3
≠2.0
1
0.5
50
100
≠1.2
0.12
V
V
kHz
Vp-p
Vp-p
V
V
kHz
kHz
Vp-p
Vp-p
mV
mV
V
V
Vp-p
Vp-p
V
4
= 10kHz
1.0Vp-p ≠ 0.4V
DC
V
4
= 800mVp-p ≠ 0.4V
DC
V
4
= 10kHz ≠ 0.4V
DC
V
4
= 0.8Vp-p + 375mV
DC
V
4
= 50Hz + 375mV
DC
(square wave)
V
4
= 750kHz, 0.7Vp-p
V
4
= 750kHz,
0.7Vp-p + 0.25V
DC
V
4
= 750kHz, 0.7Vp-p
V
4
= 750kHz
DEFECT
EFM
MIRROR
Item
No.
O
O
≠ 12 ≠
CXA1372BQ/BS
Electric Characteristics Measurement Circuit
GND
0.1Ķ
S1
GND
1000P
130
13k
S3
100k
200k
S2
S4
0.033Ķ
AVcc
GND
130
S6
100k
200k
S5
GND
13k
GND
V5
AC
130
13k
S7
60k
5.1k
GND
510k
Vcc
240k
AV
EE
Vcc
Vcc
GND
E1
CLK
XLT
DATA
10k
Vcc Vcc
10k
Vcc
10k
DGND
10k
DGND
S8
S9
0.01Ķ
1k
A
DGND
1M
DGND
10k
Vcc
10k
3300P
A
DVcc
1000P
DGND
3300P
DGND
V4
AC
GND
V3
AC
GND
DV
EE
GND
E2
V2
AC
GND
GND
0.1Ķ
GND
E3
GND
E4
V1
AC
GND
0.1Ķ
GND
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
40
39
38
37
36
35
34
31
32
33
41
42
43
44
45
46
47
48
1
CB
CP
RFI
RFO
DV
EE
TZC
TE
TDFCT
ATSC
FZC
FE
FDFCT
DATA
XLT
CLK
LOCK
DIRC
AV
EE
SSTOP
ISET
FSET
SL≠
SLO
SL+
VC
FGD
FS3
FLB
FEO
FE≠
SRCH
TGU
TG2
AVcc
TAO
TA≠
DVcc
CC2
CC1
FOK
EFM
ASY
DFCT
MIRR
DGND
SENS
C. OUT
XRST
DGND
DGND
+
GND
+
+
+
A
A
A

≠ 13 ≠
CXA1372BQ/BS
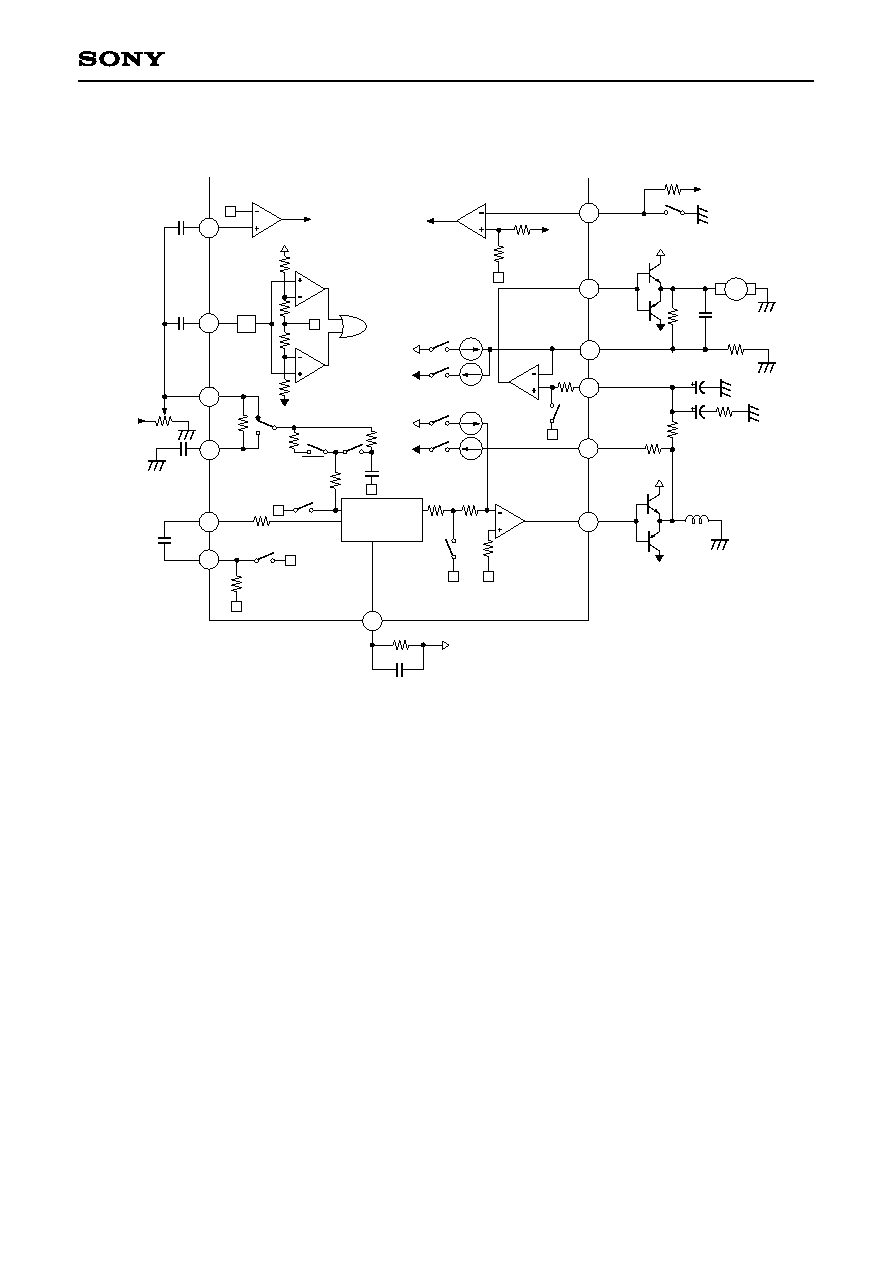
Description of Functions
Focus Servo
FZC
1.2k
56k
FE
22k
FZC
Focus Phase
Compensation
48k
510k
0.1Ķ
FSET
FLB
40k
FGD
10k
DFCT
2200p
FE
470k
0.1Ķ
FDFCT
FS3
580k
46k
100k
FOCUS COIL
FE≠
120k
11Ķ
22Ķ
ISET
FS1
50k
40k
4.7Ķ
SRCH
10k
FS2
0.01Ķ
FEO
0.1Ķ
20k
FS4
FS3
120k
46
47
48
2
3
4
16
7
17
6
5
DGND
The above figure shows a block diagram of the focus servo.
Ordinarily the FE signal is input to the focus phase compensation circuit through a 20k
and 48k
resistance;
however, when DFCT is detected, the FE signal is switched to pass through a low-pass filter formed by the
internal 470k
resistance and the capacitance connected to Pin 48. When this DFCT countermeasure circuit is
not used, leave Pin 48 open.
When FS3 is ON, the high-frequency gain can be cut by forming a low-frequency time constant through a
capacitor connected between Pins 2 and 3 and the internal resistor.
The capacitor connected between Pin 4 and GND is a time constant to boost the low frequency in the normal
playback state.
The peak frequency of the focus phase compensation is approximately 1.2kHz when a resistance of 510k
is
connected to Pin 16.
The focus search level is approximately Ī1.1Vp-p when using the constants indicated in the above figure. This
level is inversely proportional to the resistance connected between Pin 17 and GND. However, changing this
resistance also changes the level of the track jump and sled kick as well.
The FZC comparator inverted input is set to 2% of V
CC
and VC (Pin 1); (V
CC
≠ VC)
◊
2%.
510k
resistance is recommended for Pin 16.
≠ 14 ≠
CXA1372BQ/BS
Tracking Sled Servo
42
TZC
TZC
0.022Ķ
45
0.047Ķ
ATSC
BPF
100k
1k
1k
100k
ATSC
43
44
TE
22k
0.1Ķ
TE
TDFCT
470k
DFCT
680k
TG1
TG1
680K
10k
TM1
66P
Tracking
Phase
Compensation
8
9
0.033Ķ
TGU
TG2
20k
TG2
470k
10k
90k
TM7
11
12
TA≠
13
SL+
14
15
SLO
SL≠
TRACKING
COIL
100k
82k
22Ķ
3.3Ķ
15k
8.2k
0.015Ķ
M
SLED MOTOR
120k
100k
SSTOP
SSTOP
100k
1k
10k
TM2
TM6
TM5
22ĶA
22ĶA
TM4
TM3
11ĶA
11ĶA
16
510k
0.01Ķ
FSET
TAO
18
The above figure shows a block diagram of the tracking and sled servo.
The capacitor connected between Pins 8 and 9 is a time constant to cut the high-frequency gain when TG2 is
OFF. The peak frequency of the tracking phase compensation is approximately 1.2kHz when a 510k
resistance connected to Pin 16.
To jump tracks in FWD and REV directions, turn TM3 or TM4 ON. During this time, the peak voltage applied to
the tracking coil is determined by the TM3 or TM4 current and the feedback resistance from Pin 12. To be
more specific,
Track jump peak voltage = TM3 (or TM4) current
◊
feedback resistance
The FWD and REV sled kick is performed by turning TM5 or TM6 ON. During this time, the peak voltage
applied to the sled motor is determined by the TM5 or TM6 current and the feedback resistance from Pin 15;
Sled kick peak voltage = TM5 ( or TM6) current
◊
feedback resistance
The values of the current for each switch are determined by the resistance connected between Pin 17 and
GND. When this resistance is 120k
:
TM3 ( or TM4) = Ī11ĶA, and TM5 (or TM6) = Ī22ĶA.
This current value is almost inversely proportional to the resistance and the variable range is approximately 5
to 40ĶA at TM3.
SSTOP is the ON/OFF detection signal for the limit SW of the linear motor's innermost track.
As is the case with the FE signal, the TE signal is switched to pass through a low-pass filter formed by the
internal resistance (470k
) and the capacitor connected to Pin 44.
TM-1 was ON at DFCT in the CXA1082 and CXA1182, but it does not operate in the CXA1372.

≠ 15 ≠
CXA1372BQ/BS
Focus OK circuit
15k
92k
VG
54k
20k
V
CC
0.625V
RFO
RFI
FOK
◊
1
FOCUS OK AMP
FOCUS OK
COMPARATOR
RF signal
33
39
40
C5
0.01Ķ
The focus OK circuit creates the timing window okaying the focus servo from the focus search state.
The HPF output is obtained at Pin 39 from Pin 40 (RF signal), and the LPF output (opposite phase) of the
focus OK amplifier output is also obtained.
The focus OK output reverses when V
RFI
≠ V
RFO
≠0.37V.
Note that, C5 determines the time constants of the HPF for the EFM comparator and mirror circuit and the LPF
of the focus OK amplifier. Ordinarily, with a C5 equal to 0.01ĶF selected, the fc is equal to 1kHz, and block
error rate degradation brought about by RF envelope defects caused by scratched discs can be prevented.
EFM comparator
EFM comparator changes RF signal to a binary value. The asymmetry generated due to variations in disc
manufacturing cannot be eliminated by the AC coupling alone. Therefore, the reference voltage of EFM
comparator is controlled through 1 and 0 that are in approximately equal numbers in the binary EFM signals.
As this comparator is a current SW type, each of the High and Low levels is not equal to the power supply
voltage. A feedback has to be applied through the CMOS buffer.
R8, R9, C8, and C9 form a LPF to obtain (V
CC
+ DGND)/2V. When fc (cut-off frequency) exceeds 500Hz, the
EFM low-frequency components leak badly, and the block error rate worsens.
31
C8
C9
ASY
R8
R9
CMOS
BUFFER
CXD2500
100k
20k
VC
Vcc
40k
40k
AUTO ASYMMETRY
BUFFER
AUTO ASYMMETRY
CONTROL AMP
39
RFI
EFM COMPARATOR
32
EFM
DGND = 0V
◊
6

≠ 16 ≠
CXA1372BQ/BS
DEFECT circuit
After inversion, RFI signal is bottom held by means of the long and short time constants. The long time-
constant bottom hold keeps the mirror level prior to the defect.
The short time-constant bottom hold responds to a disc mirror defect in excess of 0.1ms, and this is
differentiated and level-shifted through the AC coupling circuit.
The long and short time-constant signals are compared to generate at mirror defect detection signal.
RFO
a
◊
2
b
DEFECT AMP
CC1
CC2
DFCT
CB
0.01Ķ
0.033Ķ
DEFECT COMPARATOR
DEFECT BOTTOM
HOLD
e
c
d
e
d
c
b
a
BOTTOM
HOLD (1);
Solid line CC1
DEFECT
AMP
RFO
DEFECT
BOTTOM
HOLD (2);
Dotted line CC2
H
L
34
35
37
40
30

≠ 17 ≠
CXA1372BQ/BS
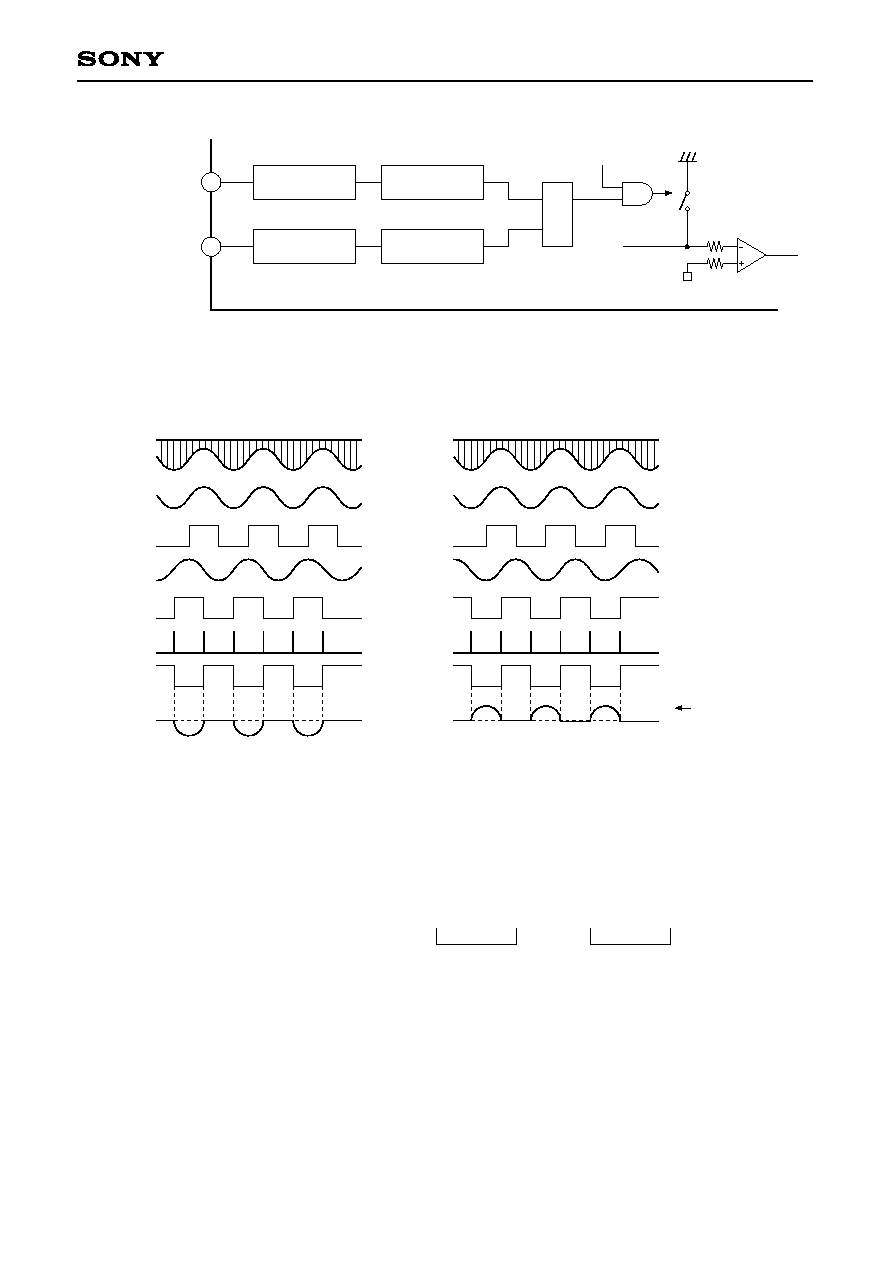
Mirror Circuit
The mirror circuit performs peak and bottom hold after the RFI signal has been amplified.
For the peak hold, a time constant can follow a 30kHz traverse, and, for the bottom hold, one can follow the
rotation cycle envelope fluctuation.
Through differential amplification of the peak and bottom hold signals H and I, mirror output can be obtained by
comparing an envelope signal J (demodulated to DC) to signal K for Which peak holding at a level 2/3 that of
the maximum was performed with a large time constant. In other words, mirror output is low for tracks on the
disc and high for the area between tracks (the MIRR areas). In addition, a high signal is output when a defect
is detected. The mirror hold time constant must be sufficiently large in comparison with the traverse signal.
20k
0.033Ķ
RFO
RFI
CP
MIRROR
COMPARATOR
PEAK &
BOTTOM
HOLD
◊
2.2
K
MIRROR HOLD AMP
J
H
I
◊
1
G
MIRROR AMP
MIRR
DGND
29
38
39
RFO
H
L
0V
0V
0V
0V
G
(RFI)
H
(PEAK HOLD)
I
(BOTTOM HOLD)
(MIRROR HOLD)
J
K
MIRR
≠ 18 ≠
CXA1372BQ/BS
Commands
The input data to operate this IC is configured as 8-bit data; however, below, this input data is represented by
2-digit hexadecimal numerals in the form $XX, where X is a hexadecimal numeral between 0 and F.
Commands for the CXA1372 can be broadly divided into four groups ranging in value from $0X to $3X.
1. $0X ("FZC" at SENS (Pin 27))
These commands are related to focus servo control.
The bit configuration is as shown below.
D7
D6
D5
D4
D3
D2
D1
D0
0
0
0
0
FS4
FS3
FS2
FS1
Four focus-servo related switches exist: FS1 to FS4 corresponding to D0 to D3, respectively.
$00
When FS1 = 0, Pin 7 is charged to (22ĶA ≠ 11ĶA)
◊
50k
= 0.55V.
If FS2 = 0, this voltage is no longer transferred, and the output at Pin 5 becomes 0V.
$02
From the state described above, the only FS2 becomes 1. When this occurs, a negative signal is output
to Pin 5. This voltage level is obtained by equation 1 below.
(22ĶA ≠ 11ĶA)
◊
50k
◊
.
.
.
.
Equation 1
$03
From the state described above, FS1 becomes 1, and a current source of +22ĶA is split off.
Then, a CR charge/discharge circuit is formed, and the voltage at Pin 7 decreases with the time as
shown in Fig. 1 below.
This time constant is obtained with the 50k
resistance and an external capacitor.
By alternating the commands between $02 and $03, the focus search voltage can be constructed. (Fig. 2)
0V
0V
$
00 02
03
02
03
02
00
Fig. 1. Voltage at Pin 7 when FS1 gose from 0
1
Fig. 2. Constructing the search voltage by alternating between $02 and $03 (Voltage at Pin 5)
resistance between Pins 5 and 6
50k
≠ 19 ≠
CXA1372BQ/BS
The instant the signal is brought into focus.
$08
$03
($00)
$02
(20ms) (200ms)
Drive voltage
Focus error
SENS pin
(FZC)
Focus OK
1-1. FS4
This switch is provided between the focus error input (Pin 47) and the focus phase compensation, and is in
charge of turning the focus servo ON and OFF.
$00
$08
Focus OFF
Focus ON
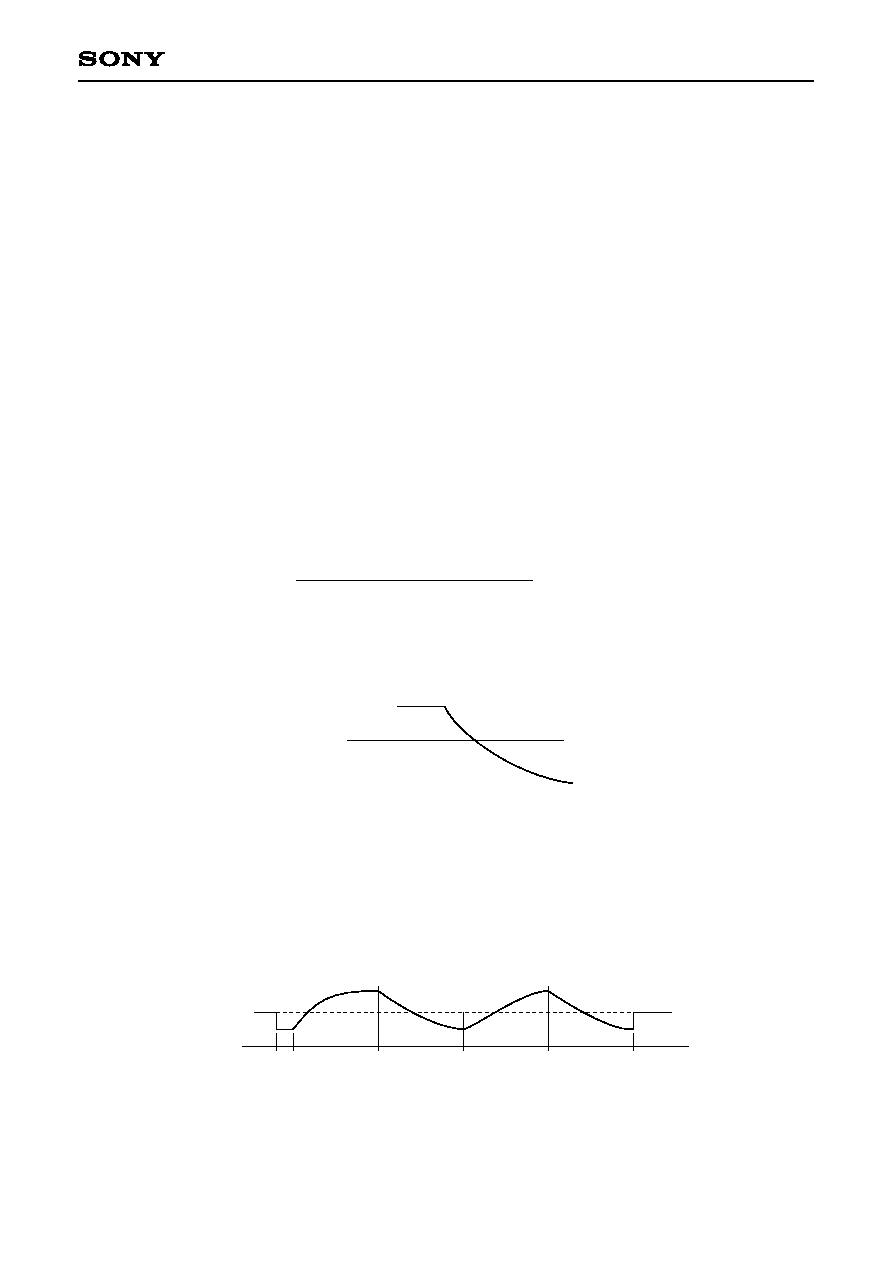
1-2. Procedure of focus activation
For description, suppose that the polarity is as described below.
a) The lens is searching the disc from far to near;
b) The output voltage (Pin 5) is changing from negative to positive; and
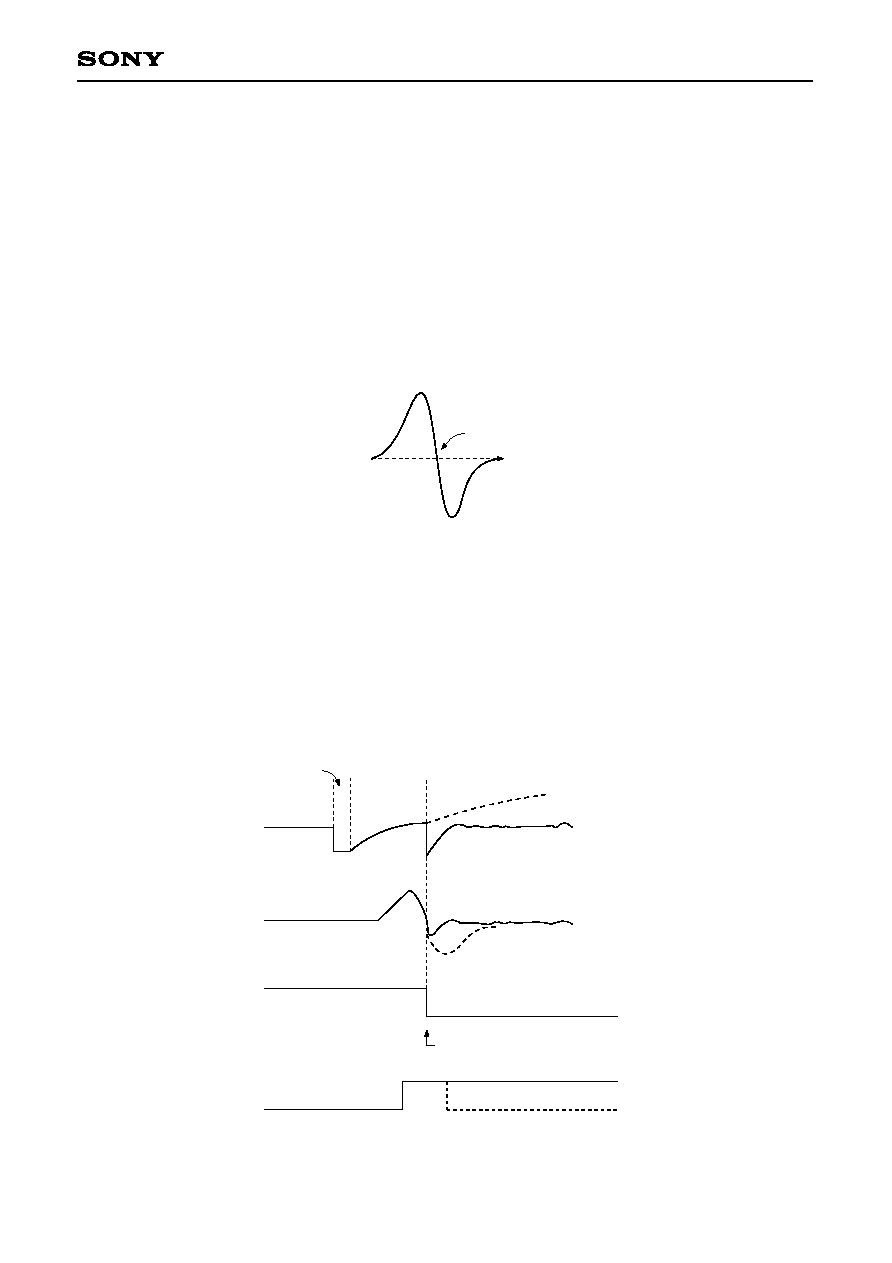
c) The focus S-curve is varying as shown below.
The focus servo is activated at the operating point indicated by A in Fig. 3. Ordinarily, focus searching and
turning the focus servo switch ON are performed when the focus S-curve transits the point A indicated in Fig. 3.
To prevent misoperation, this signal is ANDed with the focus OK signal.
In this IC, FZC (Focus Zero Cross) signal is output from the SENS pin (Pin 27) as the point A transit signal.
Focus OK is output as a signal indicating that the signal is in focus (can be in focus in this case).
Following the line of the above description, focusing can be well obtained by observing the following timing
chart.
The broken lines in the figure
indicate the voltage assuming
the signal is not in focus.
t
A
Fig. 3. S-curve
Fig. 4. Focus ON timing chart

≠ 20 ≠
CXA1372BQ/BS
1-3. SENS (Pin 27)
The output of the SENS pin differs depending on the input data as shown below.
$0X: FZC
$1X: AS
$2X: TZC
$3X: SSTOP
$4X to 7X: HIGH-Z
2. $1X ("AS" at SENS (Pin 27))
These commands deal with switching TG1 and TG2 ON/OFF.
The bit configuration is as follows
D7
D6
D5
D4
D3
D2
D1
D0
0
0
0
1
ANTI
Break
TG2
TG1
SHOCK
circuit
ON/OFF ON/OFF
TG1, TG2
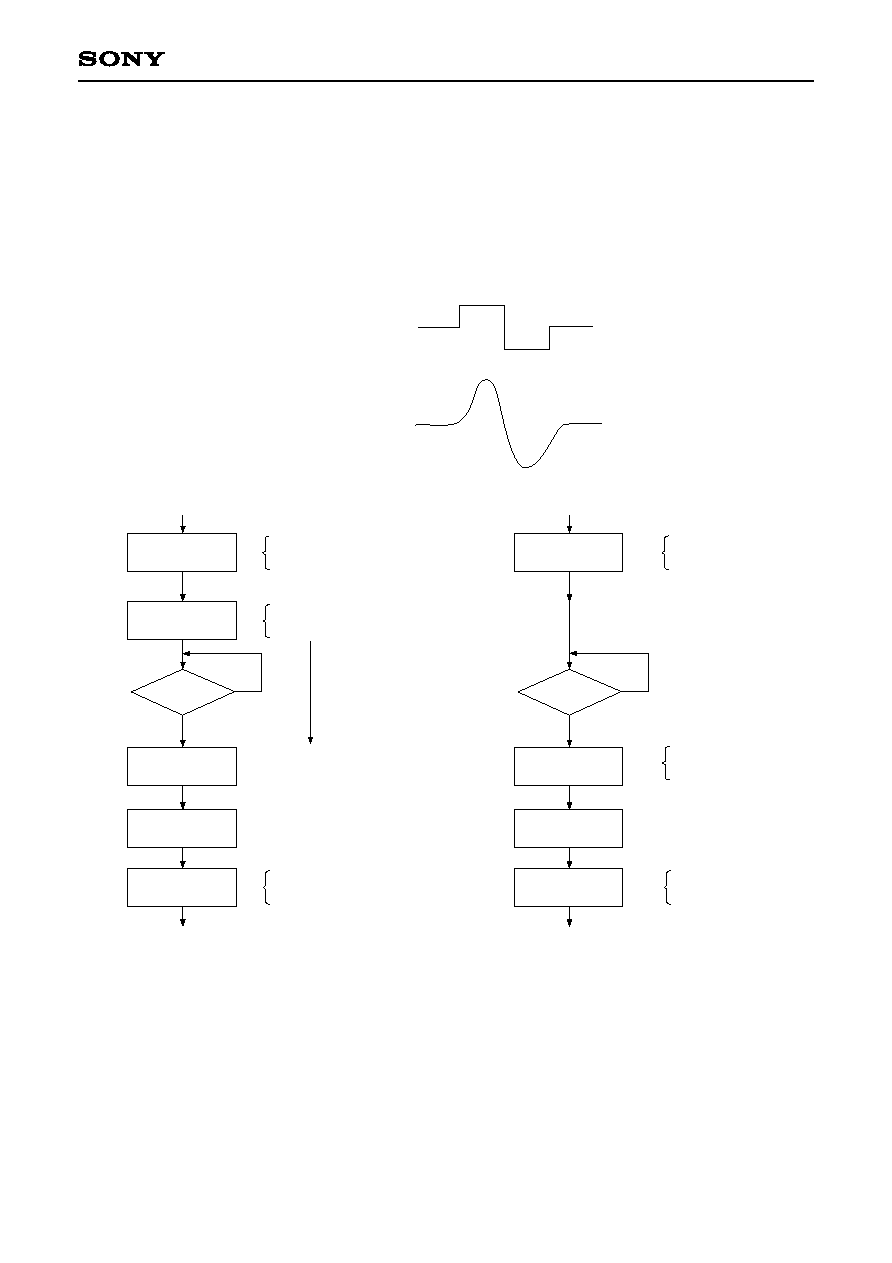
The purpose of these switches is to switch the tracking servo gain Up/Normal. The brake circuit (TM7) is to
prevent the frequently occurred phenomena where the merely 10-track jump has been performed actually
though a 100-track jump was intended to be done due to the extremely degraded actuator settling caused by
the servo motor exceeding the linear range after a 100 or 10-track jump.
When the actuator travels radially; that is, when it traverses from the inner track to the outer track of the disc
and vice versa, the brake circuit utilizes the fact that the phase relationship between the RF envelope and the
tracking error is 180įout-of-phase to cut the unneeded portion of the tracking error and apply braking.
Note that the time from the High to Low transition of FZC to the time command $08 is asserted must be
minimized. To do this, the software sequence shown in B is better than the sequence shown in A.
FZC
?
NO
YES
F. OK ?
NO
Transfer $08
Latch
FZC
?
NO
F. OK ?
NO
Transfer $08
Latch
(A)
(B)
YES
YES
YES
Fig. 5. Poor and good software command sequences
≠ 21 ≠
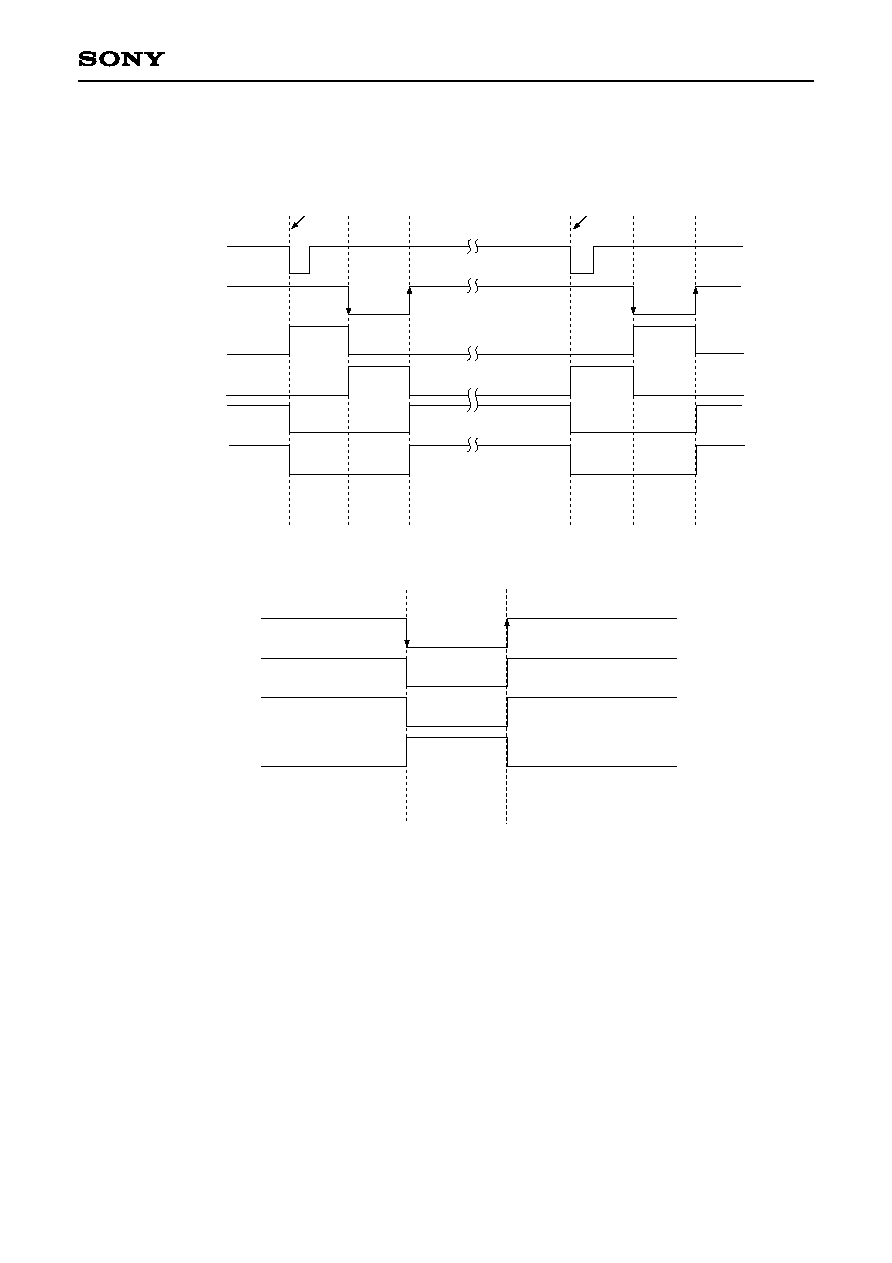
CXA1372BQ/BS
Envelope
Detection
[
B]
[
E]
RFI
(TZC)
Tracking error
(Latch)
Q
D
CK
(MIRR)
[
C]
[
F]
[
G]
BRK
D2
TM7
Low: open
High: make
[
A]
[
D]
Waveform
Shaping
Waveform
Shaping
Edge Detection
39
42
[
H]
Fig. 6. TM7 operation (brake circuit)
From inner to outer track
0V
From outer to inner track
("MIRR")
("TZC")
Braking is
applied from
here.
[
A]
[
B]
[
C]
[
D]
[
E]
[
F]
[
G]
[
H]
Fig. 7. Internal waveform
3. $2X ("TZC" at SENS (Pin 27))
These commands deal with turning the tracking servo and sled servo ON/OFF, and creating the jump pulse
and fast forward pulse during access operations.
D7
D6
D5
D4
D3
D2
D1
D0
0
0
1
0
Tracking
Sled
control
control
00: OFF
00: OFF
01: Servo ON
01: Servo ON
10: F-JUMP
10: F-FAST FORWARD
11: R-JUMP
11: R-FAST FORWARD
TM1, TM3, TM4
TM2, TM5, TM6
≠ 22 ≠
CXA1372BQ/BS
DIRC (Pin 20) and 1 Track Jump
Normally, an acceleration pulse is applied for a 1-track jump. Then a deceleration pulse is given for a specified
time observing the tracking error from the moment it passes point 0, and tracking servo is turned ON again.
For the 100-track jump to be explained in the next item, as long as the number of tracks is about 100 there is
no problem. However a 1-track jump must be performed here, which requires the above complicated
procedure. For the 1-track jump in CD players, both the acceleration and deceleration take about 300 to
400Ķs. When software is used to execute this operation, it turns out as shown in the flow chart of Fig. 9.
Actually, it takes some time to transfer data.
Acceleration
Pulse waveform
Tracking error
Deceleration
$2C transfer latch
$28 transfer only
TZC
?
NO
YES
Latch
Timer (0.3ms)
$25 transfer latch
TR: REV
SL: OFF
TR: FWD
SL: OFF
Execute
Execute
TR: ON
SL: ON
Execute
$2C transfer latch
TZC
?
NO
YES
DIRC = L
Timer (0.3ms)
DIRC = H
TR: REV
SL: OFF
TR: FWD
SL: OFF
Execute
TR: ON
SL: ON
Fig. 9. 1-track jump not using DIRC (Pin 20)
Fig. 10. 1-track jump with DIRC (Pin 20)
Fig. 8. Pulse waveform and tracking error of 1-track jump
The DIRC (Direct Control) pin was provided in this IC to facilitate the 1-track jump operation. Conduct the
following process to perform 1-track jump using DIRC (normal High).
(a) Acceleration pulse is output. ($2C for REV or $28 for FWD).
(b) With TZC
(or TZC
), set DIRC to Low. (SENS Pin 27 outputs "TZC"). As the jump pulse polarity is
inverted, deceleration is applied.
(c) Set DIRC to High after a specific time.
Both the tracking servo and sled servo are switched ON automatically.
As a result, the track jump turns out as shown in the flow chart of Fig. 10 and the two serial data transfers
can be omitted.

≠ 23 ≠
CXA1372BQ/BS
4. $3X
This command selects the focus search and sled kick levels.
D0, D1 ..... Sled, NORMAL feed, high-speed feed
D2, D3 ..... Focus search level selection
D7 D6 D5 D4
0
0
1
1
Focus search level
Sled kick level
Relative
value
D3
(PS4)
0
0
1
1
D2
(PS3)
0
1
0
1
D1
(PS2)
0
0
1
1
D0
(PS1)
0
1
0
1
Ī1
Ī2
Ī3
Ī4
≠ 24 ≠
CXA1372BQ/BS
Parallel Direct Interface
1. DIRC
$28 latch
$2C latch
ON
OFF
ON
OFF
OFF
ON
ON
OFF
XLT
DIRC
FWD JUMP
REV JUMP
TRACK SERVO
SLED SERVO
ON
OFF
ON
OFF
DOWN
UP
LOCK
SLED SERVO
TG1, TG2
TRACKING GAIN
2. LOCK (Sled overrun prevention circuit)
≠ 25 ≠
CXA1372BQ/BS
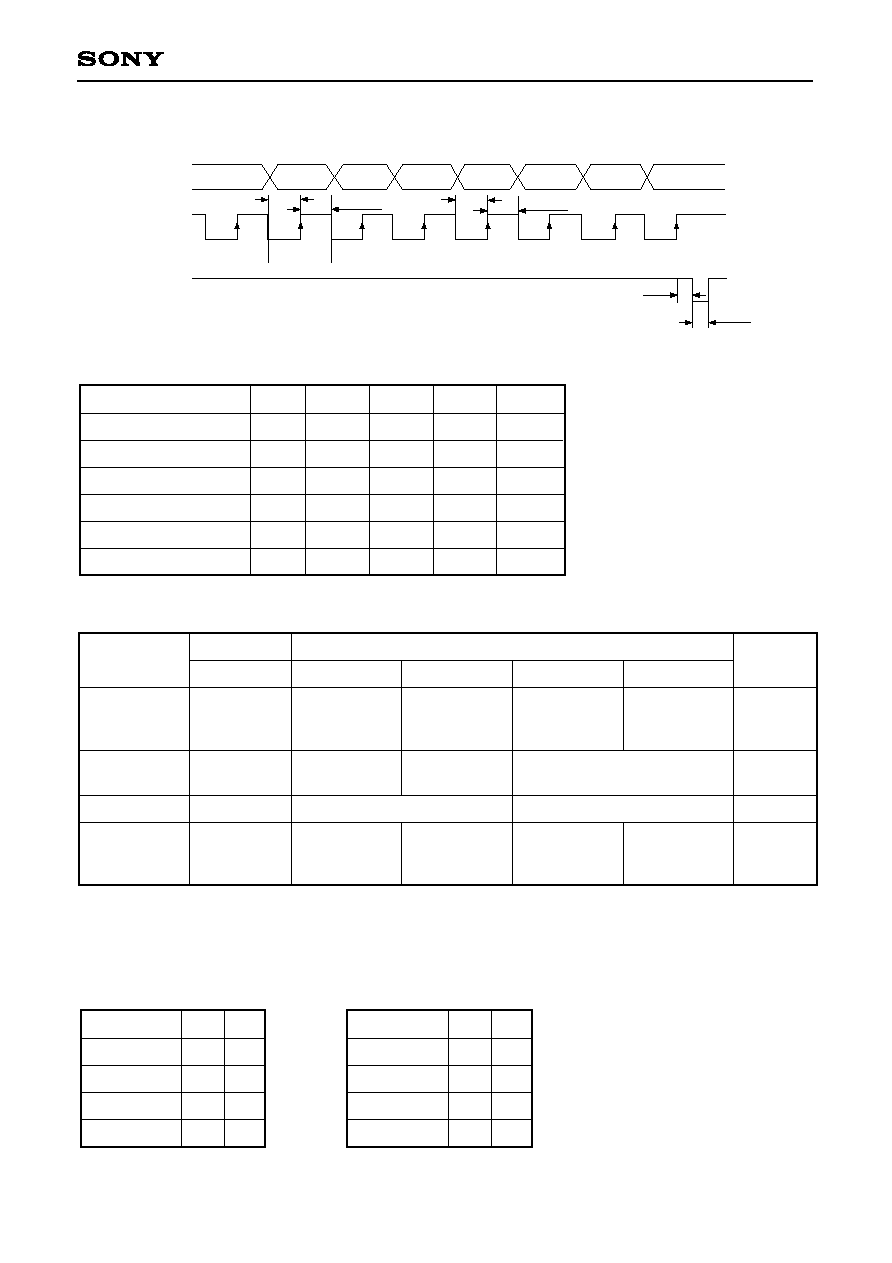
CPU Serial Interface Timing Chart
t
WCK
D0
D1
D2
D3
D4
D5
D6
D7
t
WCK
t
SU
1/fck
t
h
t
WL
t
D
DATA
CLK
XLT
Item
Clock frequency
Clock pulse width
Setup time
Hold time
Delay time
Latch pulse width
Symbol
fck
fwck
t
su
t
h
t
D
t
WL
Min.
500
500
500
1000
1000
Typ.
Max.
Unit
MHz
ns
ns
ns
ns
ns
1
(DV
CC
≠ DGND = 4.5 to 5.5V)
System Control
Focus control
Tracking
control
Tracking mode
Select
D7 D6 D5 D4
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
FS4
Focus
ON
Anti-shock
PS4
Focus
search + 2
PS3
Focus
search + 1
PS2
Sled kick + 2
PS1
Sled kick + 1
FS3
Gain
Down
Brake
ON
FS2
Search
ON
TG2
Gain set
1
FS1
Search
Up
TG1
FZC
A. S
TZC
SSTOP
Tracking mode
2
Sled mode
3
Address
D3
D2
D1
D0
Data
SENS
output
2
Tracking mode
FWD JUMP
REV JUMP
D3
0
0
1
1
D2
0
1
0
1
OFF
ON
3
Sled mode
FWD MOVE
REV MOVE
D1
0
0
1
1
D0
0
1
0
1
OFF
ON
Item
1
Gain set
TG1 and TG2 can be set independently.
When the anti-shock is at 1 (00011xxx), both TG1 and TG2 are inverted when the internal anti-shock is at High.

≠ 26 ≠
CXA1372BQ/BS
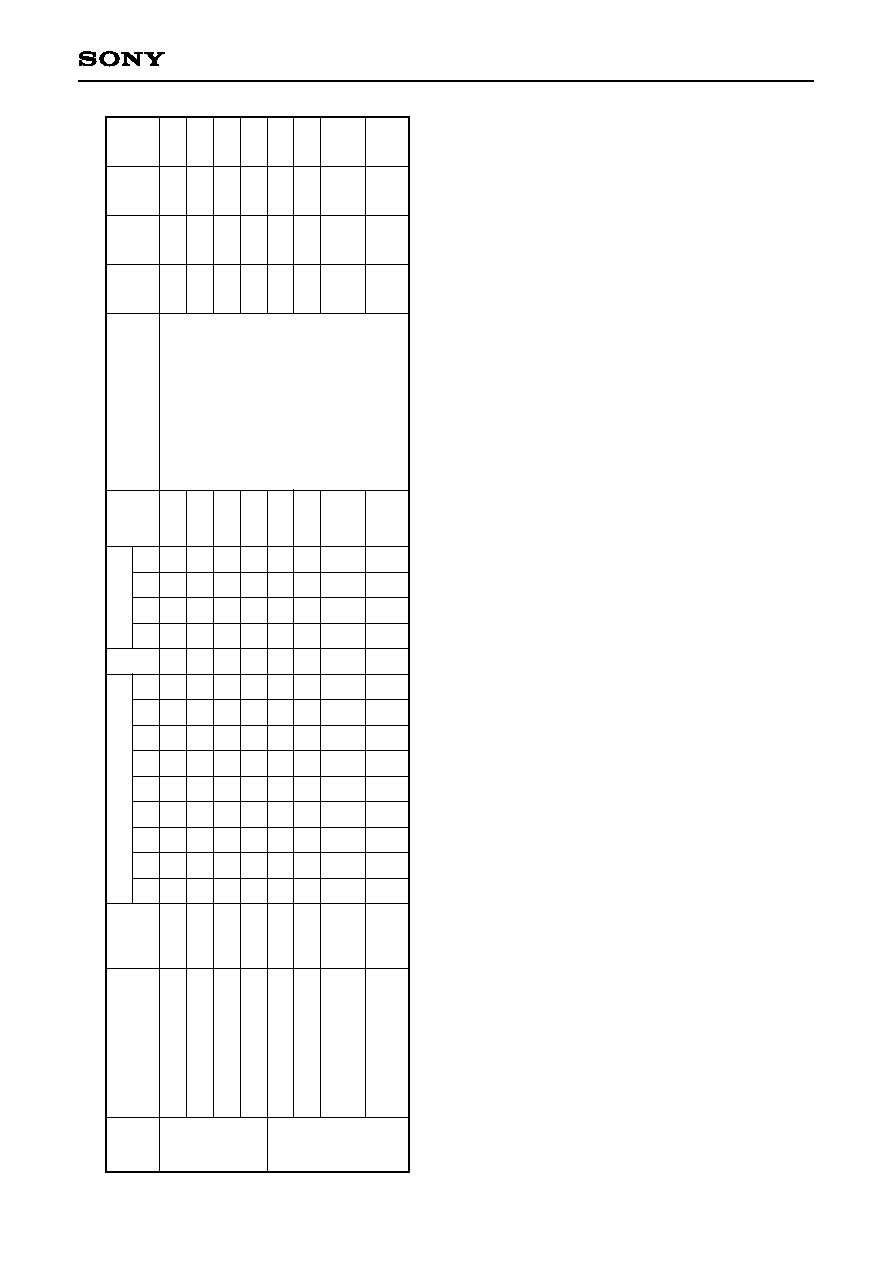
Serial Data Truth Table
FOCUS CONTROL
TRACKING CONTROL
TRACKING MODE
DIRC = 1 DIRC = 0 DIRC = 1
TM = 654321
654321
654321
AS = 0 AS = 1
TG = 2 1
TG = 2 1
Hex.
Function
FS = 4 3 2 1
$00
$01
$02
$03
$04
$05
$06
$07
$08
$09
$0A
$0B
$0C
$0D
$0E
$0F
$10
$11
$12
$13
$14
$15
$16
$17
$18
$19
$1A
$1B
$1C
$1D
$1E
$1F
Serial data
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1
0 0 0 0 0 0 1 0
0 0 0 0 0 0 1 1
0 0 0 0 0 1 0 0
0 0 0 0 0 1 0 1
0 0 0 0 0 1 1 0
0 0 0 0 0 1 1 1
0 0 0 0 1 0 0 0
0 0 0 0 1 0 0 1
0 0 0 0 1 0 1 0
0 0 0 0 1 0 1 1
0 0 0 0 1 1 0 0
0 0 0 0 1 1 0 1
0 0 0 0 1 1 1 0
0 0 0 0 1 1 1 1
0 0 0 1 0 0 0 0
0 0 0 1 0 0 0 1
0 0 0 1 0 0 1 0
0 0 0 1 0 0 1 1
0 0 0 1 0 1 0 0
0 0 0 1 0 1 0 1
0 0 0 1 0 1 1 0
0 0 0 1 0 1 1 1
0 0 0 1 1 0 0 0
0 0 0 1 1 0 0 1
0 0 0 1 1 0 1 0
0 0 0 1 1 0 1 1
0 0 0 1 1 1 0 0
0 0 0 1 1 1 0 1
0 0 0 1 1 1 1 0
0 0 0 1 1 1 1 1
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
0 1 0 0
0 1 0 1
0 1 1 0
0 1 1 1
1 0 0 0
1 0 0 1
1 0 1 0
1 0 1 1
1 1 0 0
1 1 0 1
1 1 1 0
1 1 1 1
0 0
0 0
0 1
0 1
1 0
1 0
1 1
1 1
0 0
0 0
0 1
0 1
1 0
1 0
1 1
1 1
0 0
1 1
0 1
1 0
1 0
0 1
1 1
0 0
0 0
1 1
0 1
1 0
1 0
0 0
1 1
0 1
000000
001000
000011
000010
001010
000011
010000
011000
100001
100000
101000
100001
000001
000100
000011
000011
000110
000011
010001
010100
100001
100001
100100
100001
000100
001000
000011
000110
001010
000011
010100
011000
100001
100100
101000
100001
001000
000100
000011
001010
000110
000011
011000
010100
100001
101000
100100
100001
$20
$21
$22
$23
$24
$25
$26
$27
$28
$29
$2A
$2B
$2C
$2D
$2E
$2F
0 0 1 0 0 0 0 0
0 0 1 0 0 0 0 1
0 0 1 0 0 0 1 0
0 0 1 0 0 0 1 1
0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 1
0 0 1 0 0 1 1 0
0 0 1 0 0 1 1 1
0 0 1 0 1 0 0 0
0 0 1 0 1 0 0 1
0 0 1 0 1 0 1 0
0 0 1 0 1 0 1 1
0 0 1 0 1 1 0 0
0 0 1 0 1 1 0 1
0 0 1 0 1 1 1 0
0 0 1 0 1 1 1 1

≠ 27 ≠
CXA1372BQ/BS
GND
C26
GND
GND
WFCK
XRAOF
GND
FOK
FSW
MON
MDP
MDS
LOCK
NC
VCOO
VCOI
TEST
PDO
V
SS
NC
NC
NC
VPCO
VCKI
FILO
FILI
PCO
AV
SS
CLTV
AV
DD
RF
2
5
6
7
8
9
10
11
12
13
14
15
16
18
19
20
21
22
23
1
SBSO
SCOR
WFCK
EMPH
DOUT
MD2
C16M
C4M
FSTT
XTSL
XTAO
XTAI
V
SS
APTL
APTR
MNT0
MNT1
MNT2
MNT3
XRAOF
C2PO
RFCK
GFS
XPLCK
25
26
27
28
29
30
40
39
38
37
36
35
34
31
32
33
BIAS
ASYI
ASYO
ASYE
NC
PSSL
WDCK (48)
LRCK (48)
V
DD
DATA (48)
BCLK (48)
DATA (64)
BCLK (64)
LRCK (64)
GTOP
XUGF
13
14
15
16
17
18
19
20
21
23
SL+
SL0
SL≠
FSET
ISET
SSTOP
AV
EE
DIRC
LOCK
CLK
XLT
DATA
28
29
30
36
35
34
31
32
33
DV
CC
CC2
CC1
FOK
EFM
ASY
DFCT
MIRR
DGND
SENS
C.OUT
XRST
FDFCT
FE
FZC
ATSC
TDFCT
TE
TZC
DV
EE
RFO
RFI
CP
CB
40
39
38
37
41
42
43
44
45
46
47
48
GND
GND
GND
GND
200p
1M
AV
DD
GND
GND
V
SS
GND
V
CC
C2PO
MUTE
BCLK
DATA
WDCK
LRCK
DEMP
GND
MNT0
MNT1
MNT2
MNT3
GND
GTOP
UGFS
GFS
RFCK
XPLCK
DOUT
GND
GND
GND
V
DD
MUTE
SCOR
SQCK
SUBQ
GFS
CLK
XLT
DATA
XRST
SENS
FOK
LDON
DFCT
MIRR
FE
TE
RF
LDON
V
CC
V
O
V
CC
C17
GND
GND
C15
C16
GND
C14
C13
C11
C12
GND
GND
RV2
RV1
RF
TE
FE
GND
C9
GND
C10
GND
C23
TRACK-D
GND
FOCUS-D
GND
SLED-D
GND
SPIND-D
GND
SSTOP
GND
R1
GND
C28
GND
C27
R6
R7
GND
R3
R4
SPD
SLD
FD
TD
GND
GND
R10
GND
R12
CXD2500AQ
VC
FGD
FS3
FLB
FEO
FE≠
SRCH
TGU
TG2
AV
CC
TA0
TA≠
2
3
4
5
6
7
8
9
10
11
12
1
CXA1372BQ
R1
R1
70
69
68
67
65
66
71
72
73
74
75
76
77
78
79
80
MIRR
CLKO
XLTO
DATO
CNIN
SEIN
CLOK
V
DD
XLAT
DATA
XRST
SENS
MUTE
SQCK
SQSO
EXCK
22
24
4
3
17
GND
GND
41
42
43
44
45
46
47
48
49
50
51
53
54
55
56
57
58
59
60
63
64
61
62
27
25
26
24
GND
R14
R13
GND
GND
52
PCM
Application Circuit
Application circuits shown are typical examples illustrating the operation of the devices. Sony cannot assume responsibility for
any problems arising out of the use of these circuits or for any infringement of third party patent and other right due to same.
≠ 28 ≠
CXA1372BQ/BS
Notes on Operation
1. Connection of the power supply pin
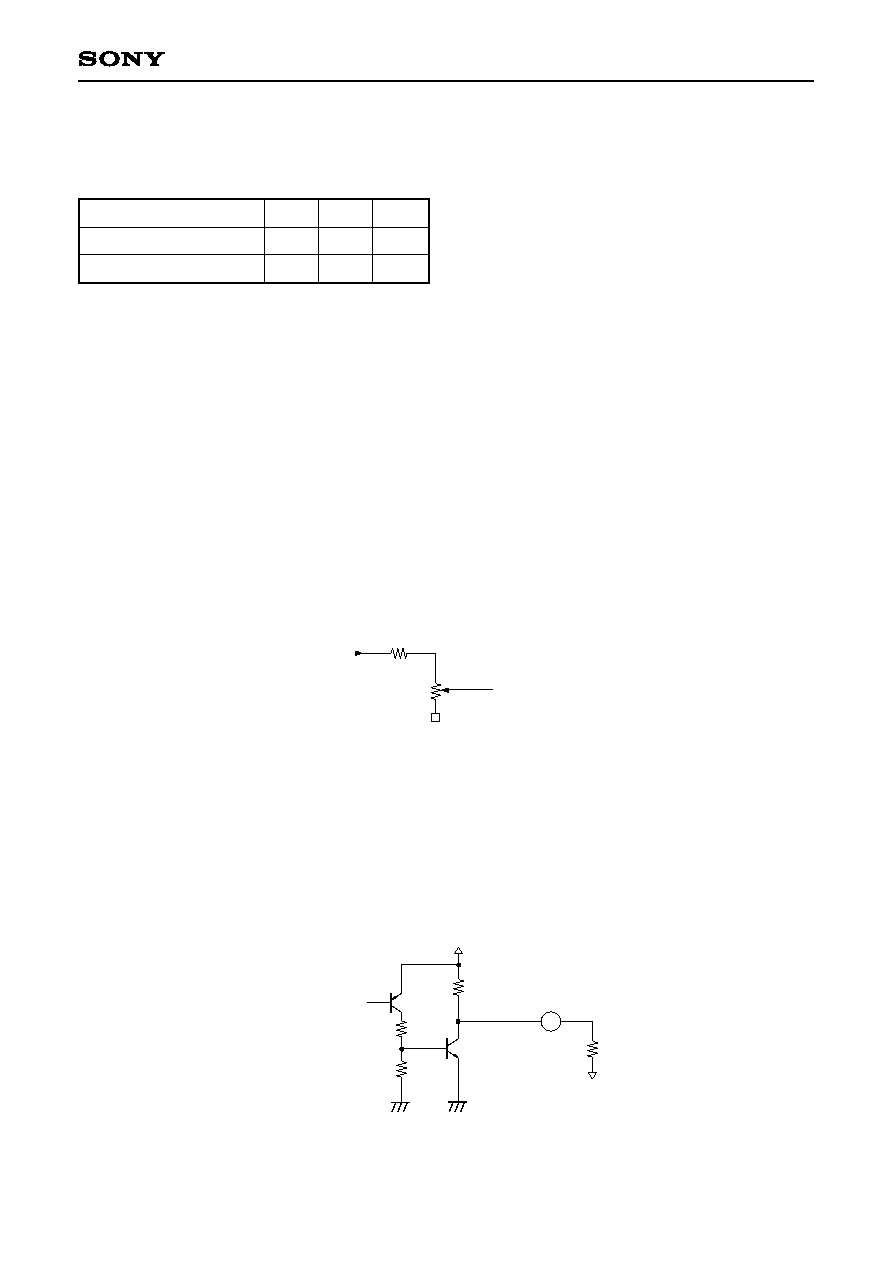
2. FSET pin
The FSET pin determines the cut-off frequency fc for the focus and tracking high-frequency phase compensation.
3. ISET pin
ISET current = 1.27V/R
= Focus search current
= Tracking jump current
= 1/2 sled kick current
4. The tracking amplifier input is clamped at 1V
BE
to prevent overinput.
5. FE (focus error) and TE (tracking error) gain changing method
(1) High gain: Resistance between FE pins (Pins 5 and 6) 100k
Large
Resistance between TA pins (Pins 11 and 12) 100k
Large
(2) Low gain: A signal, whose resistance is divided, is input to FE and TE.
6. Input voltage of microcomputer interface Pins 20 to 25, should be set as follows.
V
IH
V
CC
◊
90% or more
V
IL
V
CC
◊
10% or less
7. Focus OK circuit
(1) Refer to the "Description of Operation" for the time constant setting of the focus OK amplifier LPF and the
mirror amplifier HPF.
(2) The equivalent circuit of FOK output pin is as follows.
V
CC
20k
50k
100k
DGND
R
L
FOK
V
CC
DGND
33
FOK comparator output is:
Output voltage High: V
FOKH
near Vcc
Output voltage Low: V
FOKL
Vsat
(NPN)
+ DGND
dual Ī5V power supplies
+5V
0V
VC
+5V
≠5V
0V
single 5V power supplies
Vcc
V
EE
VC
FE
TE
≠ 29 ≠
CXA1372BQ/BS
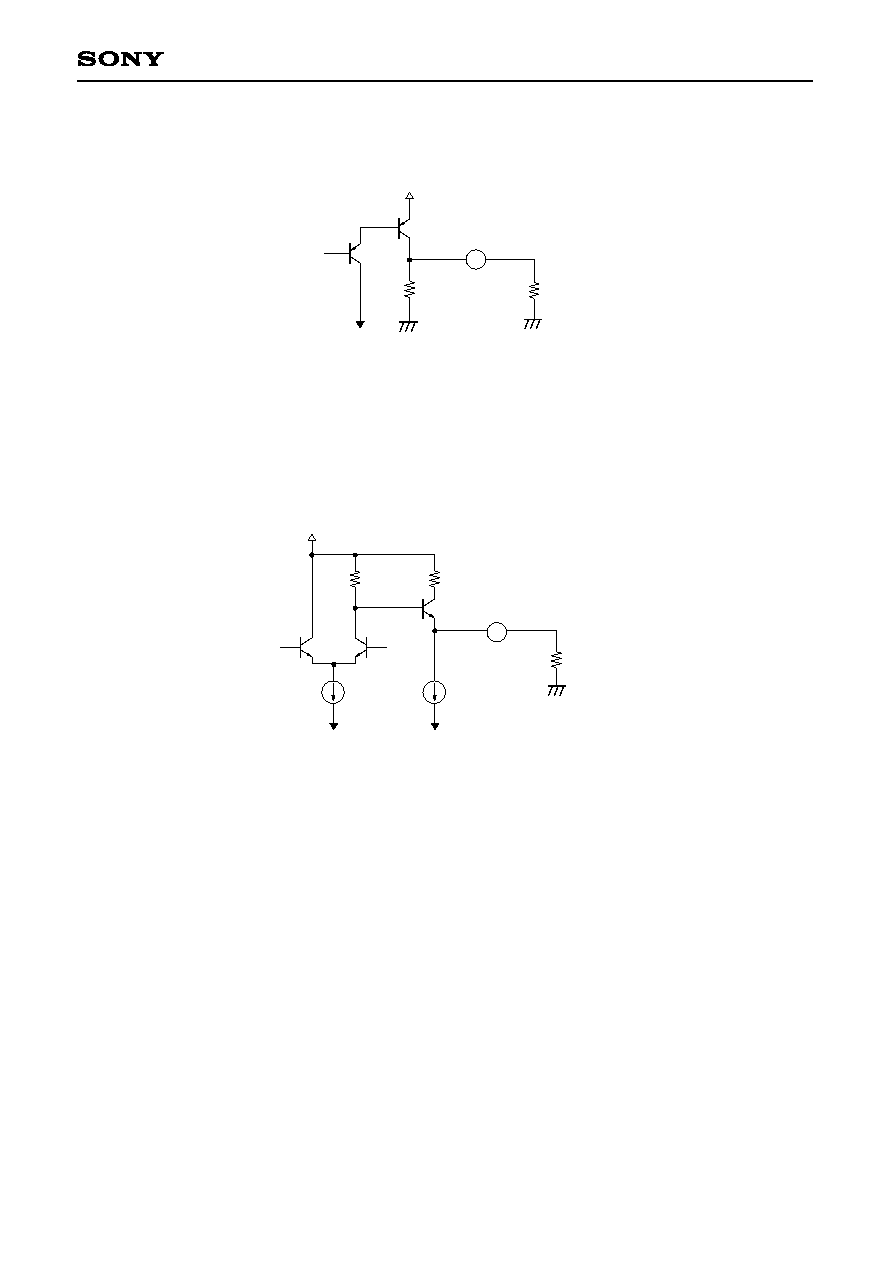
8. Mirror Circuit
(1) The equivalent circuit of MIRR output pin is as follows.
MIRR comparator output is:
Output voltage High: V
MIRH
V
CC
≠ Vsat
(LPNP)
Output voltage Low: V
MIRL
near DGND
9. EFM Comparator
(1) Note that EFM duty varies when the CXA1372 Vcc differs from that of DSP IC (such as the CXD2500).
(2) The equivalent circuit of the EFM output pin is as follows.
When the power supply current between Vcc and DGND is 5V.
EFM comparator output is:
Output voltage High: V
EFMH
V
CC
≠ V
BE (NPN)
Output voltage Low: V
EFML
V
CC
≠ 4.8 (k
)
◊
700 (ĶA) ≠ V
BE (NPN)
700ĶA
4.8k
50
2mA
32
EFM
R
L
DGND
Vcc
V
EE
DGND
20k
MIRR
R
L
DGND
29
≠ 30 ≠
CXA1372BQ/BS
Standard Circuit Design Data for Focus/Tracking Internal Phase Compensation
S1
S2
S3
S4
S5
S6
S7
S8
S9
E1
E2
E3
E4
SD
Measure-
ment
point
Description of output
waveform and measurement
method
5
5
5
5
11
11
11
11
08
08
0C
0C
25
25
25
13
25
13
Unit
Max.
Typ.
Min.
Symbol
Bias condition
SW condition
1.2kHz gain
1.2kHz phase
1.2kHz gain
1.2kHz phase
1.2kHz gain
1.2kHz phase
2.7kHz gain
2.7kHz phase
O
O
O
O
21.5
63
16
63
13
≠125
26.5
≠130
dB
deg
dB
deg
dB
deg
dB
deg
When C
FLB
= 0.1Ķ
F
TRACKING
FOCUS
Item
Mode
O
O
O
O
≠ 31 ≠
CXA1372BQ/BS
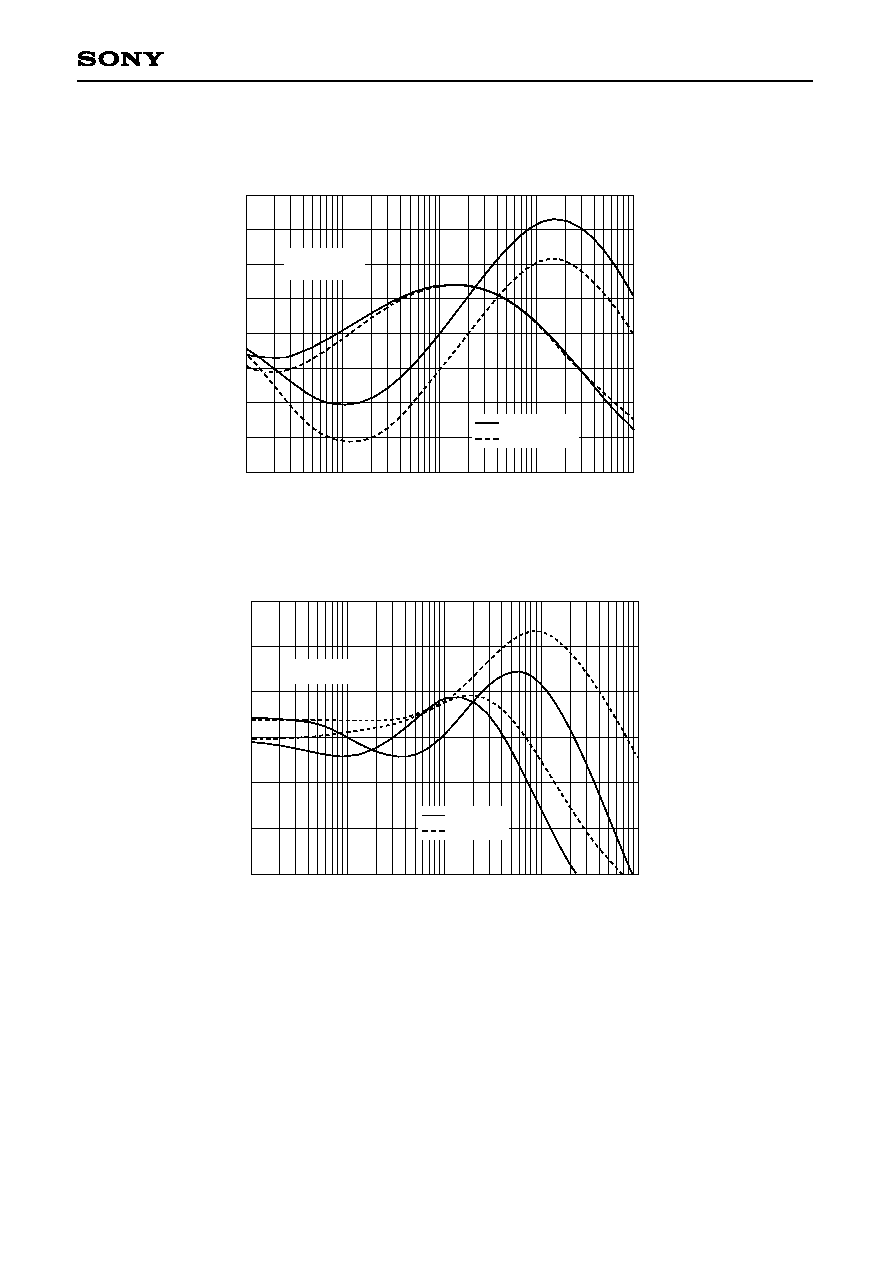
Example of Representative Characteristics
40
35
30
25
20
15
10
5
10
1
10
2
10
3
10
4
10
5
≠180
≠135
≠90
≠45
0
45
90
135
180
f ≠ Frequency [Hz]
G ≠ Gain [dB]
≠ Phase [degree]
FOCUS frequency characteristics
40
30
20
10
0
≠10
≠20
10
1
10
2
10
3
10
4
10
5
f ≠ Frequency [Hz]
G ≠ Gain [dB]
≠ Phase [degree]
Tracking frequency characteristics
G
G
0
180
120
60
0
≠60
≠120
≠180
C
TGU
= 0.033Ķ
GAIN UP
NORMAL
C
FGD
= 0.1Ķ
C
FLB
= 0.1Ķ
GAIN DOWN
NORMAL

≠ 32 ≠
CXA1372BQ/BS
Package Outline
Unit: mm
CXA1372BQ
CXA1372BS
SONY CODE
EIAJ CODE
JEDEC CODE
M
PACKAGE STRUCTURE
PACKAGE MATERIAL
LEAD TREATMENT
LEAD MATERIAL
PACKAGE WEIGHT
EPOXY RESIN
SOLDER / PALLADIUM
PLATING
COPPER / 42 ALLOY
48PIN QFP (PLASTIC)
15.3 Ī 0.4
12.0 ≠ 0.1
+ 0.4
0.8
0.3 ≠ 0.1
+ 0.15
Ī 0.12
13
24
25
36
37
48
1
12
2.2 ≠ 0.15
+ 0.35
0.9 Ī
0.2
0.1 ≠ 0.1
+ 0.2
13.5
0.15
0.15 ≠ 0.05
+ 0.1
QFP-48P-L04
QFP048-P-1212-B
0.7g
48PIN SDIP (PLASTIC) 600mil
13.0
+ 0.3 ≠ 0.1
4.6
+ 0.4 ≠ 0.1
0.25
+ 0.1
≠ 0.05
48
25
1
24
1.778
15.24
0į to 15į
0.5 Ī 0.1
0.9 Ī 0.15
3.0 MIN
0.5 MIN
SONY CODE
EIAJ CODE
JEDEC CODE
PACKAGE STRUCTURE
PACKAGE MATERIAL
LEAD TREATMENT
LEAD MATERIAL
PACKAGE WEIGHT
EPOXY RESIN
SOLDER PLATING
COPPER / 42 ALLOY
5.1g
SDIP-48P-02
SDIP048-P-0600-A
43.2
+ 0.4
≠ 0.1