 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: CXD2529Q | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

≠ 1 ≠
CXD2529Q
E96651A73
CD Digital Signal Processor
Sony reserves the right to change products and specifications without prior notice. This information does not convey any license by
any implication or otherwise under any patents or other right. Application circuits shown, if any, are typical examples illustrating the
operation of the devices. Sony cannot assume responsibility for any problems arising out of the use of these circuits.
Playback
speed
CD-DSP block
DAC block
◊
2
3.4V
4.5V
◊
1
3.4V
3.4V
◊
1
1
3.4V
V
DD
(min.) [V]
100 pin QFP (Plastic)
Description
The CXD2529Q is a digital signal processor LSI for
CD players and is equipped with built-in digital filters,
zero detection circuit, 1-bit DAC, and analog low-
pass filter on a single chip.
Features
Digital Signal Processor (DSP) Block
∑ Playback mode supporting CAV (Constant Angular
Velocity)
≠ Frame jitter-free
≠ Allows 0.5 to double-speed continuous playback
≠ Allows relative rotational velocity readout
≠ Supports external spindle control
∑ Wide capture range mode
≠ Spindle rotational velocity following method
≠ Supports normal-speed and double-speed playback
∑ 16K RAM
∑ EFM data demodulation
∑ Enhanced EFM frame sync signal protection
∑ SEC strategy-based error correction
∑ Subcode demodulation and Sub Q data error detection
∑ Digital spindle servo
∑ 16-bit traverse counter
∑ Asymmetry compensation circuit
∑ Serial bus-based CPU interface
∑ Error correction monitor signals, etc. are output
from a new CPU interface.
∑ Servo auto sequencer
∑ Digital audio interface output
∑ Digital peak meter
Digital Filter, DAC, Analog Low-Pass Filter Block
∑ DBB (Digital Bass Boost)
∑ Supports double-speed playback
∑ Digital de-emphasis
∑ Digital attenuation function
∑ Zero detection function
∑ 8fs oversampling digital filter
∑ S/N ratio: 100dB or more (master clock: 384fs typ.)
Logical value: 109dB
∑ THD + N: 0.007% or less (master clock: 384fs typ.)
∑ Rejection band attenuation: ≠60dB or more
Applications
CD players
Structure
Silicon gate CMOS IC
Absolute Maximum Ratings
∑ Supply voltage
V
DD
≠0.3 to +7.0
V
∑ Input voltage
V
I
≠0.3 to +7.0
V
(Vss ≠ 0.3V to V
DD
+ 0.3V)
∑ Output voltage
V
O
≠0.3 to +7.0
V
∑ Storage temperature
Tstg
≠40 to +125
∞C
∑ Supply voltage difference
V
SS
≠ AV
SS
≠0.3 to +0.3
V
V
DD
≠ AV
DD
≠0.3 to +0.3
V
Note) AV
DD
includes XV
DD
, and AV
SS
includes XV
SS
.
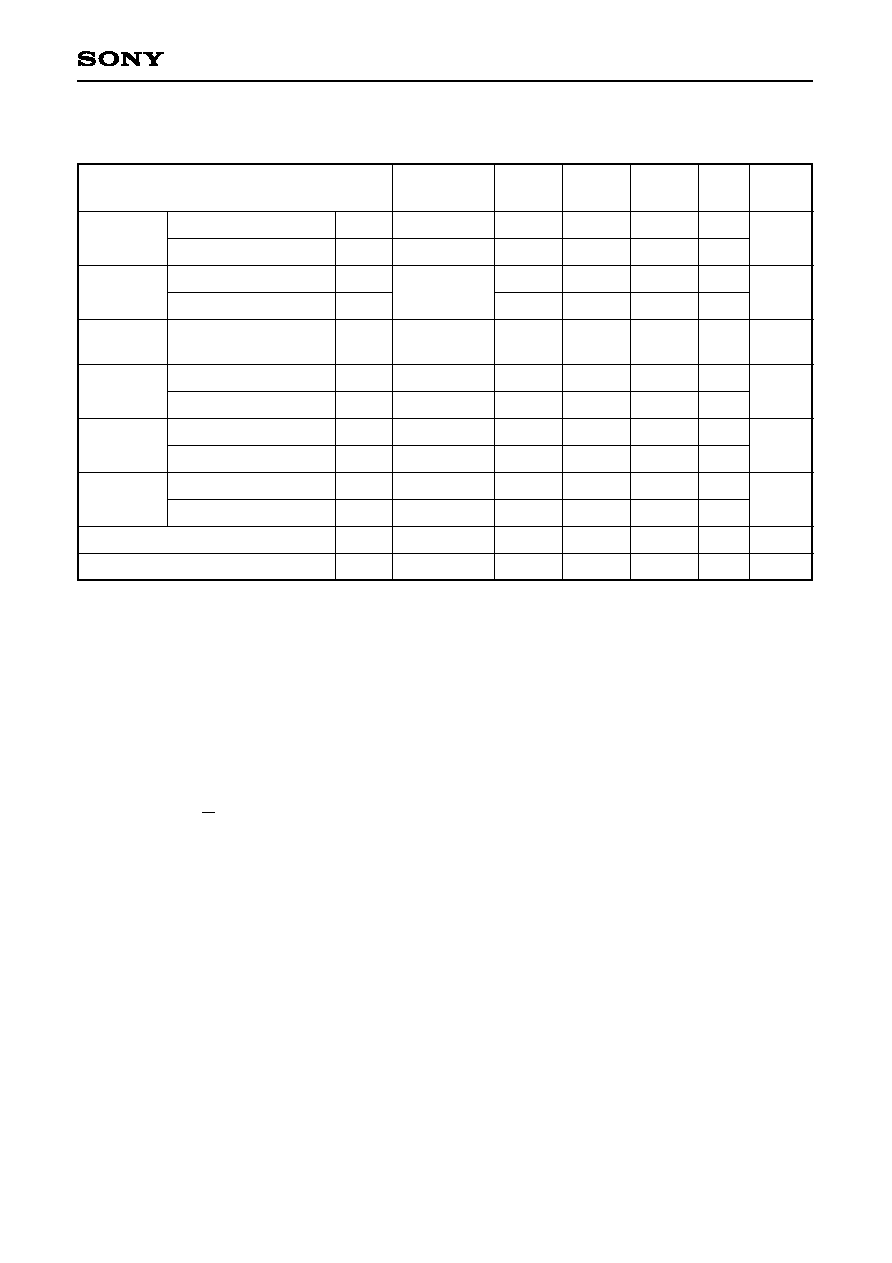
Recommended Operating Conditions
∑ Supply voltage
V
DD
3.4 to 5.25
V
∑ Operating temperature Topr
≠20 to +75
∞C
Note) The V
DD
(min.) for the CXD2519Q varies
according to the playback speed selection.
1
When the internal operation of the CD-DSP
side is set to double-speed mode and the
crystal oscillation frequency is halved,
normal-speed playback results.
Input/Output Capacitances
∑ Input pin
C
I
12 (max.)
pF
∑ Output pin
C
O
12 (max.)
pF
Note) Measurement conditions
V
DD
= V
I
= 0V
f
M
= 1MHz
For the availability of this product, please contact the sales office.
≠ 2 ≠
CXD2529Q
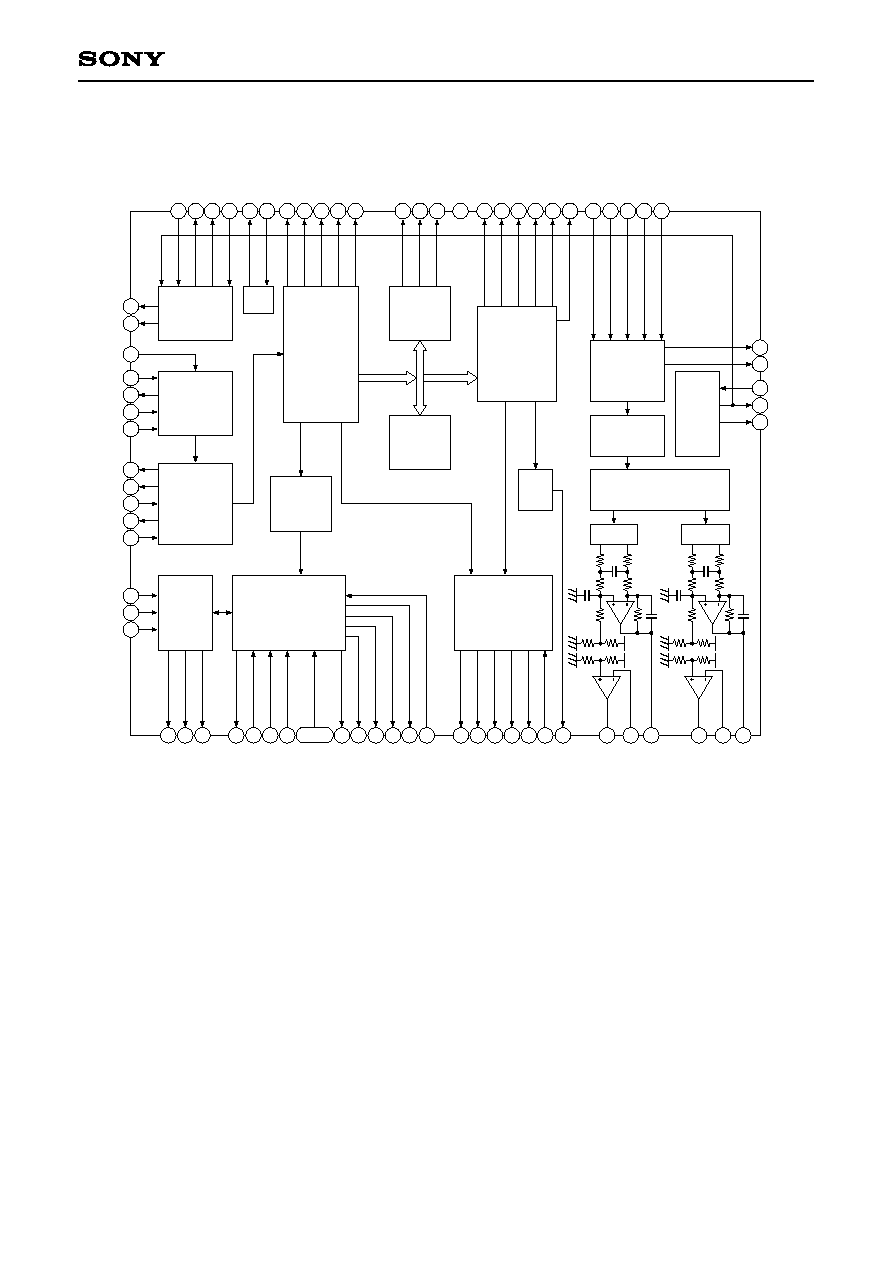
Block Diagram
EFM
demodurator
Clock
Generator
OSC
Error
Corrector
D/A
Interface
Serial-In
Interface
Over Sampling
Digital Filter
Timing
Logic
3rd-Order
Noise Shaper
PWM
PWM
16K
RAM
Digital
OUT
Digital
CLV
CPU
Interface
Servo
Auto
Sequencer
71
75 76 77
84
86
85
95
94
93
7
8
9 10 11 12
15 16 17
22
26 27 28 29 64
18 to 21
37
36
35
34
31
33
49 50
51
52
53
54
55
58 59
68
67
63
65 66
61
62
72
73
74
80
3
4
89
90
6
Asymmetry
Corrector
Digital
PLL
Sub Code
Processor
40
39
38
42
44
45
46
47
48
60
70
69
13
14
23
FSTT
C4M
RF
ASYI
ASYO
ASYE
BIAS
XPCK
FILO
FILI
PCO
CLTV
FOK
SEIN
CNIN
DATO
XLTO
CLKO
SENS
DATA
XLAT
CLOK
SPOA to D
XLON
SCOR
SBSO
EXCK
SQSO
SQCK
MON
MDP
MDS
LOCK
XROF
DOUT
LOUT2
AIN2
AOUT2
LOUT1
AIN1
AOUT1
XTSL
VPCO1
VPCO2
VCKI
V16M
VCTL
GTOP
XUGF
GFS
EMPH
WFCK
MNT3
MNT1
MNT0
TES0
RFCK
C2PO
WDCK
LRCK
PCMD
BCK
EMPHI
LRCKI
PCMDI
BCKI
SYSM
RMUT
LMUT
XTAI
XTAO
CKOUT
30
PWMI

≠ 3 ≠
CXD2529Q
Pin Configuration
40
39
38
37
36
35
34
31
32
33
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
70 69 68 67
63
64
65
66
61
62
71
72
73
74
75
76
77
78
79
80
81
82
83
84
88
87
86
85
89
90
100
99
98
97
96
95
94
91
92
93
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
1
V
DD
V
SS
LMUT
RMUT
TES2
CKOUT
SQCK
SQSO
SENS
DATA
XLAT
CLOK
SEIN
CNIN
DATO
XLTO
CLKO
SPOA
SPOB
SPOC
SPOD
XLON
FOK
V
DD
V
SS
MON
MDP
MDS
LOCK
PWMI
SYSM
V
DD
V
SS
EXCK
SBSO
SCOR
WFCK
EMPHI
EMPH
DOUT
C4M
FSTT
XTSL
MNT0
MNT1
MNT3
XROF
C2PO
RFCK
GFS
XPCK
XUGF
GTOP
V
DD
V
SS
BCKI
BCK
PCMDI
PCMD
LRCKI
LRCK
WDCK
ASYE
ASYO
ASYI
BIAS
RF
AV
DD
CLTV
AV
SS
FILI
FILO
PCO
VCTL
V16M
VCKI
VPCO1
VPCO2
TES1
TES0
XV
DD
NC
AV
SS
AV
DD
AOUT1
AIN1
LOUT1
AV
SS
XTAI
XTAO
XV
SS
AV
SS
LOUT2
AIN2
AOUT2
AV
DD
AV
SS
NC
NC
XRST

≠ 4 ≠
CXD2529Q
Pin Description
Pin
No.
Symbol
I/O
Description
Power supply (+5V).
GND.
Left-channel zero detection flag.
Right-channel zero detection flag.
TEST output pin; normally open.
Master clock frequency-divider output. Selects and outputs XTAI
◊
1,
◊
1/2,
◊
1/4 or low only.
SQSO readout clock input.
Sub Q 80-bit serial output.
SENS output to CPU.
Serial data input from CPU.
Latch input from CPU. Serial data is latched at the falling edge.
Serial data transfer clock input from CPU.
SENS input from SSP.
Track jump count signal input.
Serial data output to SSP.
Serial data latch output to SSP. Latched at the falling edge.
Serial data transfer clock output to SSP.
Microcomputer extended interface (input A).
Microcomputer extended interface (input B).
Microcomputer extended interface (input C).
Microcomputer extended interface (input D).
Microcomputer extended interface (output).
Focus OK input.
Used for SENS output and the servo auto sequencer.
Power supply (+5V).
GND.
Spindle motor on/off control output.
Spindle motor servo control.
Spindle motor servo control.
GFS is sampled at 460Hz; when GFS is high, this pin outputs a high signal.
If GFS is low eight consecutive samples, this pin outputs low.
Spindle motor external control input.
TEST pin; normally GND.
TEST pin; normally GND.
Wide-band EFM PLL charge pump output. Turned on/off by FCSW of
address E.
--
--
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
--
--
1, 0
1, Z, 0
1, Z, 0
1, 0
1, Z, 0
--
--
O
O
O
O
I
O
O
I
I
I
I
I
O
O
O
I
I
I
I
O
I
--
--
O
O
O
O
I
I
I
O
V
DD
V
SS
LMUT
RMUT
TES2
CKOUT
SQCK
SQSO
SENS
DATA
XLAT
CLOK
SEIN
CNIN
DATO
XLTO
CLKO
SPOA
SPOB
SPOC
SPOD
XLON
FOK
V
DD
V
SS
MON
MDP
MDS
LOCK
PWMI
TES0
TES1
VPCO2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33

≠ 5 ≠
CXD2529Q
Charge pump output for wide-band EFM PLL.
VCO2 oscillation input for the wide-band EFM PLL.
VCO2 oscillation output for the wide-band EFM PLL.
VCO2 control voltage input for the wide-band EFM PLL.
Master PLL charge pump output.
Master PLL (slave = digital PLL) filter output.
Master PLL filter input.
Analog GND.
Master VCO control voltage input.
Analog power supply (+5V).
EFM signal input.
Constant current input of the asymmetry circuit.
Asymmetry comparator voltage input.
EFM full-swing output (low = V
SS
, high = V
DD
).
Low: asymmetry circuit off; high: asymmetry circuit on
D/A interface. Word clock f = 2fs
D/A interface. LR clock output f = fs
LR clock input.
D/A interface. Serial data output (two's complement, MSB first).
D/A interface. Serial data input (two's complement, MSB first).
D/A interface. Bit clock output.
D/A interface. Bit clock input.
GND.
Power supply (+5V).
GTOP output.
XUGF output.
XPLCK output.
GFS output.
RFCK output.
C2PO output.
XRAOF output.
MNT3 output.
MNT1 output.
MNT0 output.
Crystal selector input. Low: 16.9344MHz; high: 33.8688MHz.
2/3 frequency-divider output for Pins 89 and 90.
1, Z, 0
1, 0
1, Z, 0
Analog
--
--
1, 0
1, 0
1, 0
1, 0
1, 0
--
--
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
O
I
O
I
O
O
I
--
I
--
I
I
I
O
I
O
O
I
O
I
O
I
--
--
O
O
O
O
O
O
O
O
O
O
I
O
VPCO1
VCKI
V16M
VCTL
PCO
FILO
FILI
AV
SS
CLTV
AV
DD
RF
BIAS
ASYI
ASYO
ASYE
WDCK
LRCK
LRCKI
PCMD
PCMDI
BCK
BCKI
V
SS
V
DD
GTOP
XUGF
XPCK
GFS
RFCK
C2PO
XROF
MNT3
MNT1
MNT0
XTSL
FSTT
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
Pin
No.
Symbol
I/O
Description

≠ 6 ≠
CXD2529Q
4.2336MHz output. 1/4 frequency-divided VCKI output in CAV-W mode.
Digital Out output.
Outputs a high signal when the playback disc has emphasis, and a low
signal when there is no emphasis.
Inputs a high signal when de-emphasis is on, and a low signal when de-
emphasis is off.
WFCK output.
Outputs a high signal when either subcode sync S0 or S1 is detected.
Sub P to W serial output.
SBSO readout clock input.
GND.
Power supply (+5V).
Mute input. Active when high.
Analog GND.
Analog power supply (+5V).
Left-channel analog output.
Left-channel operational amplifier input.
Left-channel LINE output.
Analog GND.
Power supply for master clock.
Crystal oscillation circuit input. Input the external master clock via this pin.
Crystal oscillation circuit output.
GND for master clock.
Analog GND.
Right-channel LINE output.
Right-channel operational amplifier input.
Right-channel analog output.
Analog power supply (+5V).
Analog GND.
System reset. Reset when low.
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
--
--
--
--
--
--
--
--
O
O
O
I
O
O
O
I
--
--
I
--
--
O
I
O
--
I
O
--
O
I
O
--
--
I
C4M
DOUT
EMPH
EMPHI
WFCK
SCOR
SBSO
EXCK
V
SS
V
DD
SYSM
NC
AV
SS
AV
DD
AOUT1
AIN1
LOUT1
AV
SS
XV
DD
XTAI
XTAO
XV
SS
AV
SS
LOUT2
AIN2
AOUT2
AV
DD
AV
SS
NC
NC
XRST
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
Notes) ∑ PCMD is an MSB first, two's complement output.
∑ GTOP is used to monitor the frame sync protection status. (High: sync protection window released.)
∑ XUGF is the negative pulse for the frame sync derived from the EFM signal. It is the signal before
sync protection.
∑ XPLCK is the inverse of the EFM PLL clock. The PLL is designed so that the falling edge of XPLCK
and the EFM signal transition point coincide.
∑ GFS goes high when the frame sync and the insertion protection timing match.
∑ RFCK is derived with the crystal accuracy. This signal has a cycle of 136µs (during normal-speed).
∑ C2PO represents the data error status.
∑ XRAOF is generated when the 16K RAM exceeds the ±4F jitter margin.
Pin
No.
Symbol
I/O
Description
≠ 7 ≠
CXD2529Q
Electrical Characteristics
DC Characteristics
(V
DD
= AV
DD
= 5.0V ± 5%, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
Item
Input
voltage (1)
Input
voltage (2)
Input
voltage (3)
Output
voltage (1)
Output
voltage (2)
Output
voltage (4)
Input leak current
Tri-state pin output leak current
1
2
3
4
5
6
7
1,
2,
3
Schmitt input
Analog input
I
OH
= ≠1mA
I
OL
= 1mA
I
OH
= ≠1mA
I
OL
= 2mA
I
OH
= ≠0.28mA
I
OL
= 0.36mA
V
I
= 0 to 5.50V
V
O
= 0 to 5.50V
High level input voltage
Low level input voltage
High level input voltage
Low level input voltage
Input voltage
High level output voltage
Low level output voltage
High level output voltage
Low level output voltage
High level output voltage
Low level output voltage
V
IH
(1)
V
IL
(1)
V
IH
(2)
V
IL
(2)
V
IN
(3)
V
OH
(1)
V
OL
(1)
V
OH
(2)
V
OL
(2)
V
OH
(4)
V
OL
(4)
I
LI
I
LO
0.7V
DD
0.8V
DD
Vss
V
DD
≠ 0.5
0
V
DD
≠ 0.5
0
V
DD
≠ 0.5
0
≠5
≠5
0.3V
DD
0.2V
DD
V
DD
V
DD
0.4
V
DD
0.4
V
DD
0.4
5
5
V
V
V
V
V
V
V
V
V
V
V
µA
µA
Conditions
Min.
Typ.
Max.
Unit
Applicable
pins
Applicable pins
1
XTSL, DATA, XLAT, PWMI, SYSM, EMPHI, PCMDI
2
CLOK, XRST, EXCK, SQCK, FOK, SEIN, CNIN, VCKI, ASYE, LRCKI, BCKI, SPOA to D
3
CLTV, FILI, RF, VCTL, AIN1, AIN2
4
MDP, PCO, VPCO1, VPCO2
5
ASYO, DOUT, FSTT, C4M, SBSO, SQSO, SCOR, EMPH, MON, LOCK, WDCK, DATO, CLKO, XLTO,
SENS, MDS, MNT0 to 3, WFCK, V16M, CKOUT, LMUT, RMUT, XLON, LRCK, PCMD, BCK, GTOP,
XUGF, XPCK, GFS, RFCK, C2PO, XRAOF
6
FILO
7
MDS, MDP, PCO, VPCO1, VPCO2
note) : XV
DD
and XV
SS
are included for AV
DD
and AV
SS
, respectively.
Those are the same for the explanation from the next page.

AC Characteristics
1. XTAI pin
(1) When using self-excited oscillation
(Topr = ≠20 to +75∞C, V
DD
= AV
DD
= 5.0V ± 5%)
(2) When inputting pulses to XTAI
(Topr = ≠20 to +75∞C, V
DD
= AV
DD
= 5.0V ± 5%)
(3) When inputting sine waves to XTAI via a capacitor
(Topr = ≠20 to +75∞C, V
DD
= AV
DD
= 5.0V ± 5%)
≠ 8 ≠
CXD2529Q
Oscillation frequency
f
MAX
15
34
MHz
Item
Symbol
Min.
Typ.
Max
Unit
High level pulse width
Low level pulse width
Pulse cycle
Input high level
Input low level
Rise time, fall time
t
WHX
t
WLX
t
CK
V
IHX
V
ILX
t
R
,
t
F
13
13
26
V
DD
≠ 1.0
500
500
1,000
0.8
10
ns
ns
ns
V
V
ns
Item
Symbol
Min.
Typ.
Max
Unit
Input amplitude
V
1
2.0
V
DD
+ 0.3 Vp-p
Item
Symbol
Min.
Typ.
Max
Unit
t
R
t
F
t
WHX
t
WLX
t
CK
V
ILX
V
IHX
◊
0.1
V
IHX
◊
0.9
V
IHX
XTAI
V
DD
/2

≠ 9 ≠
CXD2529Q
2. CLOK, DATA, XLAT, CNIN, SQCK and EXCK pins (V
DD
= AV
DD
= 5.0V ± 5%, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
In pseudo double-speed playback mode, except when SQSO is Sub Q Read, the maximum operating
frequency for SQCK is 300kHz and the minimum pulse width is 1.5µs.
3. BCKI, LRCKI, PCMDI pins (V
DD
= AV
DD
= 5.0V ± 5%, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
Clock frequency
Clock pulse width
Setup time
Hold time
Delay time
Latch pulse width
EXCK SQCK frequency
EXCK SQCK pulse width
f
CK
t
WCK
t
SU
t
H
t
D
t
WL
f
T
f
WT
750
300
300
300
750
750
0.65
0.65
MHz
ns
ns
ns
ns
ns
MHz
ns
Item
Symbol
Min.
Typ.
Max.
Unit
t
WCK
t
WCK
1/f
CK
t
H
t
SU
t
WL
t
D
1/f
T
t
WT
t
WT
t
H
t
SU
CLOK
DATA
XLAT
EXCK
CNIN
SQCK
SQSO
SBSO
BCK pulse width
DATAL, R setup time
DATAL, R hold time
LRCK setup time
t
W
t
SU
t
H
t
SU
ns
ns
ns
ns
Item
Symbol
Conditions
Typ.
94
18
18
18
Min.
Max.
Unit
V
DD
/2
V
DD
/2
t
W
(BCKI) t
W
(BCKI)
t
SU
(PCMDI)
t
H
(PCMDI)
t
SU
(LRCKI)
BCKI
PCMDI
LRCKI
≠ 10 ≠
CXD2529Q
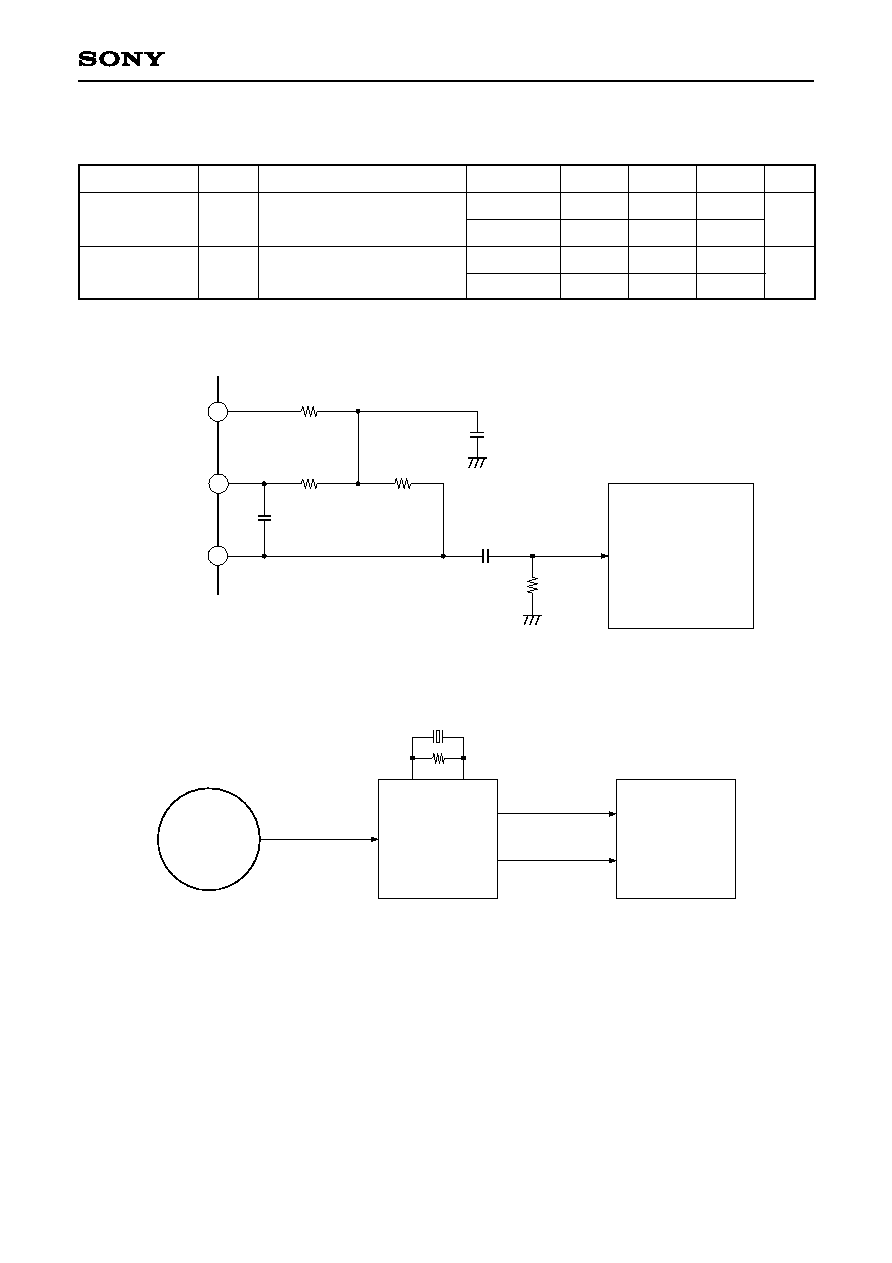
1-bit DAC, LPF Block Analog Characteristics
Analog Characteristics (V
DD
= AV
DD
= 5.0V, V
SS
= AV
SS
= 0V, Ta = 25∞C)
For both items, Fs = 44.1kHz.
The circuits for measuring the total harmonic distortion and S/N ratio are shown below.
LPF External Circuit Diagram
Block Diagram for Measuring Analog Characteristics
Item
Total harmonic
distortion
S/N ratio
Symbol
THD
S/N
Conditions
1kHz, 0dB data
Crystal
1kHz, 0dB data
(using A-weighting filter)
384Fs
768Fs
384Fs
768Fs
96
96
0.0050
0.0045
100
100
0.0070
0.0065
Min.
Typ.
Max.
Unit
%
dB
Audio Analyzer
SHIBASOKU (AM51A)
100k
22µ
680p
12k
12k
12k
150p
AOUT1 (2)
AIN1 (2)
LOUT1 (2)
Audio Analyzer
CXD2529Q
Rch
A
Lch
B
DATA
RF
TEST DISC
768Fs/384Fs

≠ 11 ≠
CXD2529Q
(V
DD
= AV
DD
= 5.0V, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
Output voltage
Load resistance
V
OUT
R
L
1
1
Vrms
k
Item
Symbol
8
Min.
Max.
1.23
Typ.
Applicable pins
Unit
When the sine wave of 1kHz and 0dB is output and it is measured using the circuit shown on the previous
page.
Applicable pins
1
LOUT1, LOUT2

≠ 12 ≠
CXD2529Q
Description of Functions
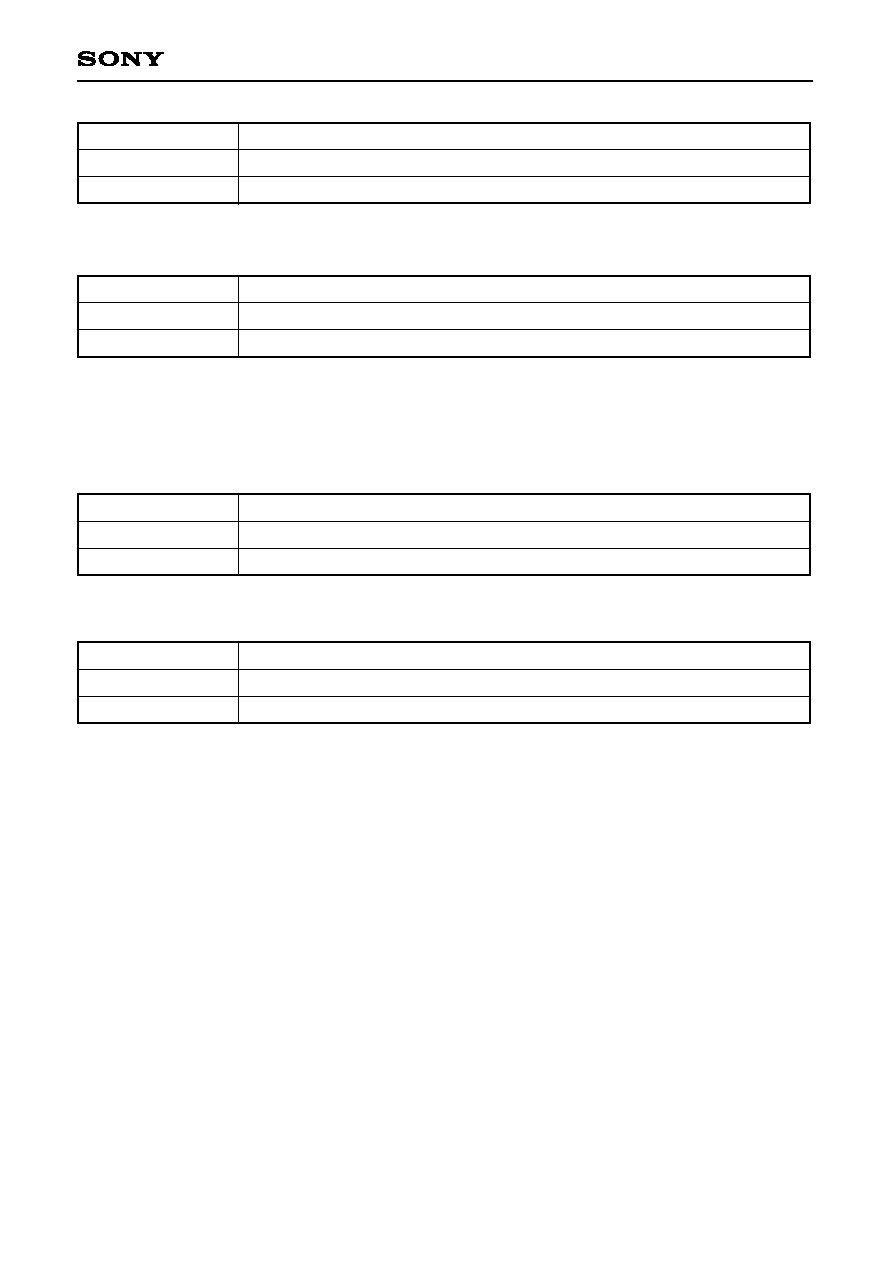
1. CPU Interface and Instructions
∑ CPU Interface
This interface uses DATA, CLOK and XLAT to set the modes.
The interface timing chart is shown below.
∑ Information on each address and the data is provided in Table 1-1.
∑ The internal registers are initialized by a reset when XRST is low; the initialization data is shown in Table 1-2.
Note) When XLAT is low, SQCK must be set high.
750ns or more
D1
Data
Address
D2
D3
D0
D1
D2
D3
750ns or more
300ns max
Valid
CLOK
DATA
XLAT
Registers 4toE
≠ 13 ≠
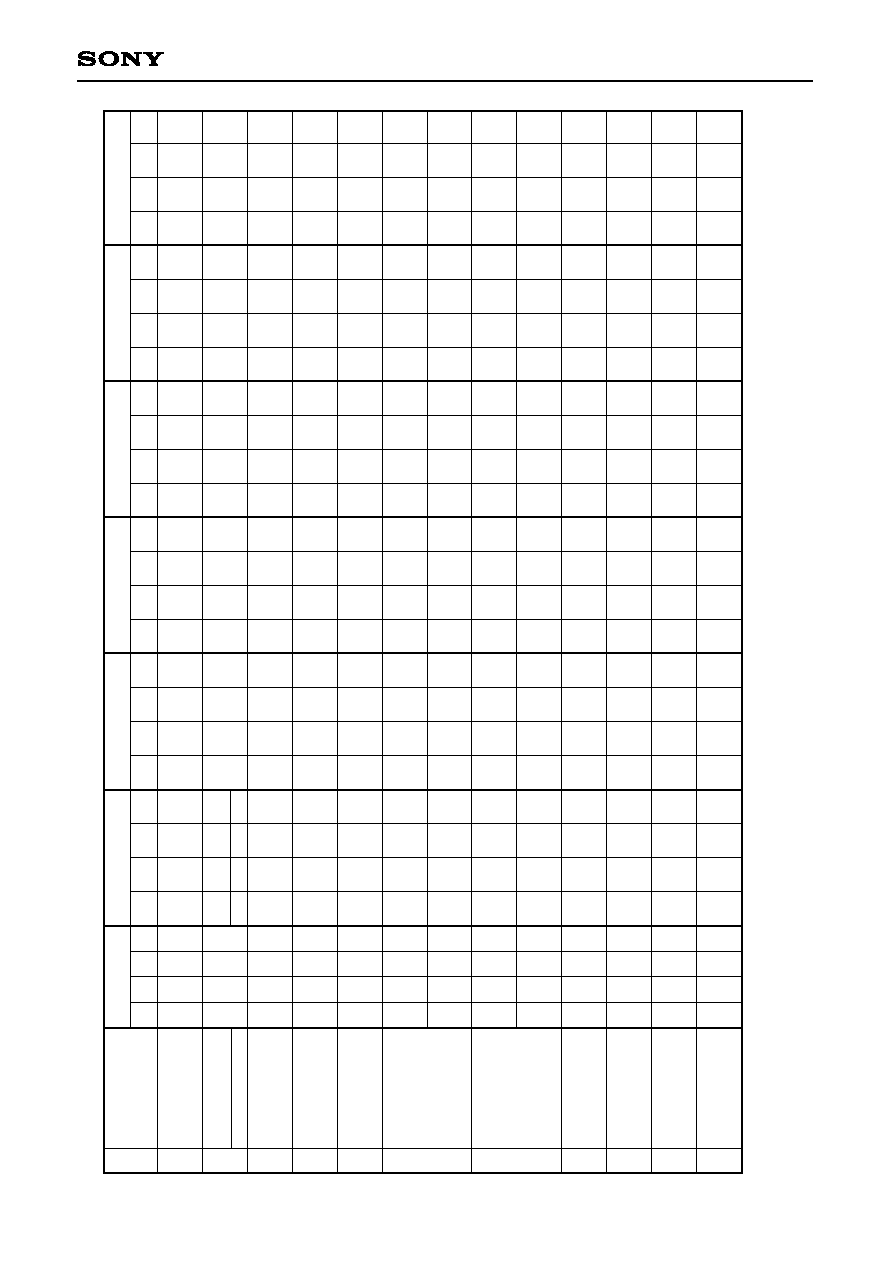
CXD2529Q
Command Table
Table 1-1.
4
5
6
7
8
9
A
B
C
D
E
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
0
0
1
1
0
0
0
1
1
1
0
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
--
--
--
2048
VCO
SEL1
0
0
0
0
--
--
VP7
EPWM
--
--
--
1024
0
0
0
0
0
--
--
VP6
SPDC
--
--
--
512
SOCT
0
0
OPSL2
0
OPSL2
1
--
--
VP5
ICAP
--
--
--
256
VCO
SEL2
SYCOF
SYCOF
EMPH
EMPH
--
--
VP4
SFSL
--
--
--
128
KSL3
OPSL1
0
OPSL1
1
SMUT
SMUT
--
--
VP3
VC2C
--
--
--
64
KSL2
MCSL
MCSL
0
0
--
--
VP2
HIFC
--
--
--
32
KSL1
CKOSL1
CKOSL1
AD9
AD9
--
--
VP1
LPWR
--
--
--
16
KSL0
CKOSL0
CKOSL0
AD8
AD8
--
--
VP0
VPON
--
--
--
8
0
ZDPL
ZDPL
AD7
AD7
--
--
--
Gain
CAV1
--
--
--
4
0
ZMUT
ZMUT
AD6
AD6
--
--
--
Gain
CAV0
--
--
--
2
1
--
0
AD5
AD5
--
--
--
FCSW
--
--
--
1
0
--
0
AD4
AD4
--
--
--
0
--
--
--
--
--
--
0
AD3
AD3
--
--
--
--
--
--
--
--
--
--
DCOF
AD2
AD2
--
--
--
--
--
--
--
--
--
--
0
AD1
AD1
--
--
--
--
--
--
--
--
--
--
0
AD0
AD0
--
--
--
--
--
--
--
--
--
--
--
--
FMUT
--
--
--
--
--
--
--
--
--
--
--
--
LRWO
--
--
--
--
--
--
--
--
--
--
--
--
BSBST
--
--
--
--
--
--
--
--
--
--
--
--
BBSL
--
--
--
--
AS3
0.18ms
0.36ms
11.6ms
32768
CDROM
0
0
0
0
SL1
Gain
MDP1
DCLV
PWM MD
CM3
AS2
0.09ms
0.18ms
5.8ms
16384
DOUT
Mute
DSPB
ON/OFF
DSPB
ON/OFF
0
0
SL0
Gain
MDP0
TB
CM2
AS1
0.05ms
0.09ms
2.9ms
8192
DOUT
ON/OFF
0
0
Mute
Mute
CPUSR
Gain
MDS1
TP
CM1
AS0
0.02ms
0.05ms
1.45ms
4096
WSEL
0
0
ATT
ATT
0
Gain
MDS0
Gain
CLVS
CM0
Command
Address
D3
D2
D1
D0
Data 1
D3
D2
D1
D0
Data 2
D3
D2
D1
D0
Data 3
D3
D2
D1
D0
Data 4
D3
D2
D1
D0
Data 5
D3
D2
D1
D0
Data 6
D3
D2
D1
D0
Register
name
Auto
sequence
Blind (A, E),
Overflow (C)
Brake (B)
Kick (D)
Auto sequence (N)
track jump count
MODE
specification
Function
specification
Audio CTRL
Serial bus
CTRL
Servo coefficient
setting
CLV CTRL
CLV mode

≠ 14 ≠
CXD2529Q
Reset Initialization
Table 1-2.
4
5
6
7
8
9
A
B
C
D
E
Auto
sequence
Blind (A, E),
Overflow (C)
Brake (B)
Kick (D)
Auto sequence (N)
track jump count
MODE
specification
Function
specification
Audio CTRL
Serial bus
CTRL
Servo coefficient
setting
CLV CTRL
CLV mode
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
0
0
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
1
0
0
0
0
1
0
0
0
1
1
1
0
0
0
1
1
0
0
0
1
0
0
0
0
--
--
--
0
0
0
0
--
--
1
0
--
--
--
0
0
0
0
--
--
1
0
--
--
--
0
0
0
0
--
--
1
0
--
--
--
1
0
0
0
--
--
0
0
--
--
--
0
0
0
0
--
--
0
0
--
--
--
0
0
0
0
--
--
0
0
--
--
--
0
1
0
0
--
--
0
0
--
--
--
0
0
0
0
--
--
0
0
--
--
--
0
0
0
0
--
--
--
0
--
--
--
0
0
0
0
--
--
--
0
--
--
--
0
1
0
0
--
--
--
0
--
--
--
0
0
0
0
--
--
--
0
--
--
--
--
--
0
0
--
--
--
--
--
--
--
--
--
0
0
--
--
--
--
--
--
--
--
--
0
0
--
--
--
--
--
--
--
--
--
0
0
--
--
--
--
--
--
--
--
--
--
0
--
--
--
--
--
--
--
--
--
--
0
--
--
--
--
--
--
--
--
--
--
0
--
--
--
--
--
--
--
--
--
--
0
--
--
--
--
Command
Address
D3
D2
D1
D0
Data 1
D3
D2
D1
D0
Data 2
D3
D2
D1
D0
Data 3
D3
D2
D1
D0
Data 4
D3
D2
D1
D0
Data 5
D3
D2
D1
D0
Data 6
D3
D2
D1
D0
Register
name

≠ 15 ≠
CXD2529Q
1-1. The meaning of the data for each address is explained below.
$4X commands
RXF = 0
FORWARD
RXF = 1
REVERSE
∑ When the Focus-on command ($47) is canceled ($40), $02 is sent and the auto sequence is interrupted.
∑ When the Track jump/move commands ($48 to $4F) are canceled ($40), $25 is sent and the auto sequence
is interrupted.
$5X commands
Auto sequence timer setting
Setting timers: A, E, C, B
Ex.) D2 = D0 = 1, D3 = D1 = 0 (Initial Reset)
A = E = C = 0.11ms
B = 0.23ms
$6X commands
Auto sequence timer setting
Setting timer: D
Ex.) D3 = 0, D2 = D1 = D0 = 1(Initial Reset)
D = 10.15ms
$7X commands
Auto sequence track jump/move count setting (N)
This command is used to set N when a 2N track jump and an N track move are executed for auto sequence.
∑ The maximum track count is 65,535, but note that with 2N track jumps the maximum track jump count is
determined by the mechanical limitations of the optical system.
∑ The number of track jump is counted according to the signals input from the CNIN pin.
CANCEL
FOCUS-ON
1 TRACK JUMP
10 TRACK JUMP
2N TRACK JUMP
N TRACK MOVE
0
0
1
1
1
1
0
1
0
0
1
1
0
1
0
1
0
1
0
1
RXF
RXF
RXF
RXF
Command
AS3
AS2
AS1
AS0
Blind (A, E), Over flow (C)
Brake (B)
0.18ms
0.36ms
0.09ms
0.18ms
0.05ms
0.09ms
0.02ms
0.05ms
Command
D3
D2
D1
D0
KICK (D)
11.6ms
5.8ms
2.9ms
1.45ms
Command
Command
Data 1
Data 2
Data 3
Data 4
D3
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
2
15
2
14
2
13
2
12
2
11
2
10
2
9
2
8
2
7
2
6
2
5
2
4
2
3
2
2
2
1
2
0
Auto sequence track
jump count setting
D3
D2
D1
D0

≠ 16 ≠
CXD2529Q
Command
D3
CDROM
DOUT
Mute
DOUT
ON/OFF
WSEL
VCO
SEL1
0
SOCT
VCO
SEL2
KSL3
KSL2
KSL1
KSL0
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 1
Data 2
MODE
specification
Data 3
Command bit
C2PO timing
CDROM = 1
CDROM = 0
See the Timing
Chart 1-1.
See the Timing
Chart 1-1.
CDROM mode; average value interpolation and pre-value hold
are not performed.
Audio mode; average value interpolation and pre-value hold
are performed.
Processing
Command bit
DOUT Mute = 1
DOUT Mute = 0
Digital Out output is muted. (DA output is not muted.)
When no other mute conditions are set, Digital Out output is not muted.
Processing
$8X commands
Command bit
DOUT ON/OFF = 1
DOUT ON/OFF = 0
Digital Out is output from the DOUT pin.
Digital Out is not output from the DOUT pin.
Processing
Command bit
Sync protection window width
WSEL = 1
WSEL = 0
±26 channel clock
1
±6 channel clock
Anti-rolling is enhanced.
Sync window protection is enhanced.
Application
See the $BX commands.
D3
0
0
1
0
D2
D1
D0
Data 4
1
In normal-speed playback, channel clock = 4.3218MHz.

≠ 17 ≠
CXD2529Q
Command bit
VCOSEL1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Multiplier PLL VCO1 is set to normal speed, and the output is
1/1 frequency-divided.
Multiplier PLL VCO1 is set to normal speed, and the output is
1/2 frequency-divided.
Multiplier PLL VCO1 is set to normal speed, and the output is
1/4 frequency-divided.
Multiplier PLL VCO1 is set to normal speed, and the output is
1/8 frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is
1/1 frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is
1/2 frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is
1/4 frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is
1/8 frequency-divided.
KSL3
KSL2
Processing
1
Approximately twice the normal speed.
Command bit
VCOSEL2
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Wide-band PLL VCO2 is set to normal speed, and the output is
1/1 frequency-divided.
Wide-band PLL VCO2 is set to normal speed, and the output is
1/2 frequency-divided.
Wide-band PLL VCO2 is set to normal speed, and the output is
1/4 frequency-divided.
Wide-band PLL VCO2 is set to normal speed, and the output is
1/8 frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is
1/1 frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is
1/2 frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is
1/4 frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is
1/8 frequency-divided.
KSL1
KSL0
Processing
2
Approximately twice the normal speed.

≠ 18 ≠
CXD2529Q
Timing Chart 1-1
Rch 16bit C2 Pointer
Lch 16bit C2 Pointer
If C2 Pointer = 1,
data is NG
C2 Pointer for upper 8bits
C2 Pointer for lower 8bits
Rch C2 Pointer
C2 Pointer for upper 8bits
C2 Pointer for lower 8bits
Lch C2 Pointer
LRCK
WDCK
CDROM = 0
CDROM = 1
C2PO
C2PO

≠ 19 ≠
CXD2529Q
$9X commands (OPSL1 = 0)
Data 2 D0 and subsequent data are DF/DAC function settings.
Command bit
DSPB = 1
DSPB = 0
Double-speed playback (CD-DSP block)
Normal-speed playback (CD-DSP block)
Processing
Command bit
SYCOF = 1
SYCOF = 0
LRCK asynchronous mode
Normal operation
Processing
Command
Data 1
D3
0
DSPB
ON/OFF
0
0
0
MCSL CKOSL1 CKOSL0 ZDPL ZMUT
--
--
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 3
Data 4
Data 2
Function
specifications
000 SYCOF
D3 to D1
D0
OPSL1
D3
--
--
--
--
D2
D1
D0
Data 5
$9X commands (OPSL1 = 1)
Data 2 D0 and subsequent data are DF/DAC function settings.
Command
Data 1
D3
0
DSPB
ON/OFF
0
0
1
MCSL CKOSL1 CKOSL0 ZDPL ZMUT
0
0
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 3
Data 4
Data 2
Function
specifications
000 SYCOF
D3 to D1
D0
OPSL1
D3
0
DCOF
0
0
D2
D1
D0
Data 5
Set SYCOF = 0 in advance when setting the $AX command LRWO to 1.

≠ 20 ≠
CXD2529Q
See the description of "Mute Flag Output" for the conditions of the mute flag output.
Command bit
DCOF = 1
DCOF = 0
DC offset is off.
DC offset is on.
Processing
DCOF can be set when OPSL is 1.
Set the DC offset to off when the zero detection mute is on.
Command bit
OPSL1 = 1
OPSL1 = 0
DCOF can be set.
DCOF cannot be set.
Processing
Command bit
MCSL = 1
MCSL = 0
DF/DAC block master clock selection. Crystal = 768Fs (33.8688MHz)
DF/DAC block master clock selection. Crystal = 384Fs (16.9344MHz)
Processing
Command bit
CKOSL1
CKOSL0
0
0
1
1
0
1
0
1
The CKOUT pin output is 1/1-frequency divided of the crystal input.
The CKOUT pin output is 1/2-frequency divided of the crystal input.
The CKOUT pin output is 1/4-frequency divided of the crystal input.
The CKOUT pin output is fixed to low.
Processing
Command bit
ZDPL = 1
ZDPL = 0
LMUT and RMUT pins are set to high for mute.
LMUT and RMUT pins are set to low for mute.
Processing
Command bit
ZMUT = 1
ZMUT = 0
Zero detection mute is on.
Zero detection mute is off.
Processing

≠ 21 ≠
CXD2529Q
$AX commands (OPSL2=0)
Data 2 and subsequent data are DF/DAC function settings.
Command
Data 1
D3
0
0
Mute
ATT
0
0
0
EMPH
D2
D1
D0
D3
D2
D1
D0
Data 2
Data 3
Audio CTRL
SMUT
0
D3
D2
OPSL2
Data 4
D3
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0
--
--
--
--
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 5
Data 6
Data 3
AD9
AD8
D1
D0
$AX commands (OPSL2 = 1)
Data 2 and subsequent data are DF/DAC function settings.
Command
Data 1
D3
0
0
Mute
ATT
0
0
1
EMPH
D2
D1
D0
D3
D2
D1
D0
Data 2
Data 3
Audio CTRL
SMUT
0
D3
D2
OPSL2
Data 4
D3
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0 FMUT LRWO BSBST BBSL
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 5
Data 6
Data 3
AD9
AD8
D1
D0
Command bit
Mute = 1
Mute = 0
CD-DSP block mute is on. The zero data is output from the CD-DSP block.
CD-DSP block mute is off.
Processing
Command bit
ATT = 1
ATT = 0
Attenuation (≠12dB) is applied to the CD-DSP block output.
Attenuation of the CD-DSP block output is off.
Processing

≠ 22 ≠
CXD2529Q
The attenuation data consists of 10 bits, and is set as follows.
Attenuation data
3FFh
3FEh
3FDh
:
001h
000h
0dB
≠0.0085dB
≠0.017dB
≠60.198dB
≠
Audio output
Command bit
EMPH = 1
EMPH = 0
De-emphasis is on.
De-emphasis is off.
Processing
If either the EMPHI pin or EMPH is high, de-emphasis is on.
If either the SYSM pin or SMUT is high, soft mute is on.
Command bit
SMUT = 1
SMUT = 0
Soft mute is on.
Soft mute is off.
Processing
Command bit
AD9 to 0
Attenuation data
Meaning
Command bit
OPSL2 = 1
OPSL2 = 0
FMUT, LRWO, BSBST and BBSL can be set.
FMUT, LRWO, BSBST and BBSL cannot be set.
Meaning
1023 settings are available because the attenuation data
(AD9 to AD0) consists of 10 bits.
The audio output for 001h to 3FFh can be obtained by
the following equation.
Audio output = 20 log [dB]
attenuation data
1024
≠ 23 ≠
CXD2529Q
Command bit
FMUT = 1
FMUT = 0
Forced mute is on.
Forced mute is off.
Meaning
FMUT can be set when OPSL2 is 1.
Command bit
BSBST = 1
BSBST = 0
Bass boost is on.
Bass boost is off.
Processing
BSBSTcan be set when OPSL2 is 1.
Command bit
BBSL = 1
BBSL = 0
Bass boost is Max.
Bass boost is Mid.
Processing
BBSL can be set when OPSL2 is 1.
Command bit
LRWO = 1
LRWO = 0
Forced sync mode
Note)
Normal operation
Meaning
LRWO can be set when OPSL2 is 1.
Set the $9X command SYCOF = 0 in advance when setting LRWO to 1.
Note) Synchronization is performed at the first LRCK falling edge during reset, so that normally this mode is
unnecessary. However, synchronization can be forcibly applied by setting LRWO to 1.

≠ 24 ≠
CXD2529Q
Command
D3
SL1
SL0
CPUSR
0
D2
D1
D0
Data 1
Serial bus
CTRL
$BX commands
SOCT
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
SubQ
Peak meter
SENS
D
SubQ
A
B
C
SL1
SL0
mode
The SQSO pin output can be switched to the various
signals by setting the $8X command SOCT and $BX
commands SL1 and SL0. Set SQCK to high at the falling
edge of XLAT.
Except for Sub Q and peak meter, the signals are loaded
to the register when they are set at the falling edge of
XLAT. Sub Q is loaded to the register with each SCOR,
and peak meter is loaded when a peak is detected.
mode A
XLAT
SQCK
mode B
mode C
mode D
Peak meter
PER1
PER2
PER3
PER4
PER5
PER6
PER7
C1F1
0
C1F2
C2F1
0
C2F2
FOK
LOCK
GFS
EMPH
VF0
ALOCK
VF1
VF2
VF3
VF4
VF5
VF6
VF7
VF0
VF1
VF2
VF3
VF4
VF5
VF6
VF7
ALOCK
C1F1
C1F2
0
C2F1
0
C2F2
FOK
LOCK
GFS
EMPH
PER1
PER2
PER3
PER4
PER5
PER6
PER7
PER0
C1F1
C1F2
0
C2F1
0
C2F2
FOK
LOCK
GFS
EMPH
0
PER0
SPOA
C1F1
C1F2
C2F1
C2F2
XRAOF
FOK
GFS
L0
L1
L2
L3
L4
L5
L6
L7
R0
R1
R2
R3
R4
R5
R6
R7
LOCK
EMPH
RFCK
WFCK
SCOR
SPOD
SPOC
SPOB
GTOP

≠ 25 ≠
CXD2529Q
Signal
PER0 to 7
FOK
GFS
LOCK
EMPH
ALOCK
VF0 to 7
SPOA to D
WFCK
SCOR
GTOP
RFCK
XRAOF
L0 to L7,
R0 to R7
RF jitter amount (used to adjust the focus bias). 8-bit binary data in PER0 = LSB, PER7 = MSB.
Focus OK
High when the frame sync and the insertion protection timing match.
GFS is sampled at 460Hz; when GFS is high, a high signal is output. If GFS is low eight
consecutive samples, a low signal is output.
High when the playback disc has emphasis.
GFS is sampled at 460Hz; when GFS is high eight consecutive samples, a high signal is
output. If GFS is low eight consecutive samples, a low signal is output.
Used during CAV-W mode. Results of measuring the disc rotational velocity.
(See the Timing Chart 2-3.) VF0 = LSB, VF7 = MSB.
SPOA to D pin inputs.
Write frame clock output.
High when either subcode sync S0 or S1 is detected.
High when the sync protection window is released.
Read frame clock output.
Low when the built-in 16K RAM exceeds the ±4 frame jitter margin.
Peak meter register output. L0 to 7 are the left-channel and R0 to 7 are the right-channel peak
data. L0 and R0 are LSB.
Description
C1F1
0
1
1
0
0
1
No Error
Single Error Correction
Irretrievable Error
C1F2
C1 correction status
C2F1
0
1
1
0
0
1
No Error
Single Error Correction
Irretrievable Error
C2F2
C2 correction status
Command bit
CPUSR = 1
CPUSR = 0
XLON pin is high.
XLON pin is low.
Processing
≠ 26 ≠
CXD2529Q
Peak meter
SQSO
XLAT
SQCK
(Peak meter)
L0
L1
L2
L3
L4
L5
L6
L7
R0
R1
R2
R3
R4
R5
R6
R7
The LSI is set to peak detection mode by setting SOCT = 0, SL1 = 0 and SL0 = 1 with the $8X and $BX
commands. In peak detection mode, the SQSO output is connected to the peak detection register. The
maximum PCM data values (absolute value, upper 8 bits) for the left and right channels can be read out from
SQSO by inputting 16 clocks to SQCK. Peak detection is not performed while inputting to SQCK, and the peak
detection register does not change during readout. This SQCK input is judged using a retriggerable
monostable multivibrator with a time constant of 270 to 400µs. Set the time for which SQCK input is high to
270µs or less. Peak detection restarts from 270 to 400µs after SQCK input.
The peak detection register is reset to zero for each readout (16 clocks input to SQCK). The maximum value
during peak detection mode is detected and held in this condition until the next readout. When setting the LSI
to peak detection mode, perform readout one time initially to reset the peak detection register.
Pre-value hold and average value interpolation data are also detected by peak detection.

≠ 27 ≠
CXD2529Q
$CX commands
∑ CLV mode gain setting: GCLVS
∑ CLVP mode gain setting: GMDP, GMDS
Servo coefficient setting
CLV CTRL ($DX)
Gain
MDP1
Gain
MDP0
Gain
MDS1
Gain
MDS0
Gain
CLVS
Gain
MDS1
0
0
0
0
1
1
Gain
MDS0
0
0
1
1
0
0
Gain
CLVS
0
1
0
1
0
1
GCLVS
≠12dB
≠6dB
≠6dB
0dB
0dB
+6dB
Command
D3
D2
D1
D0
Gain
MDP1
0
0
1
Gain
MDP0
0
1
0
GMDP
≠6dB
0dB
+6dB
Gain
MDS1
0
0
1
Gain
MDS0
0
1
0
GMDS
≠6dB
0dB
+6dB

≠ 28 ≠
CXD2529Q
$DX commands
Command bit
Description
DCLV PWM MD = 1
DCLV PWM MD = 0
Digital CLV PWM mode specified. Both MDS and MDP are used. CLV-W and
CAV-W modes can not be used.
Digital CLV PWM mode specified. Ternary MDP values are output. CLV-W and
CAV-W modes can be used.
Command bit
Description
TB = 0
TB = 1
TP = 0
TP = 1
Bottom hold at a cycle of RFCK/32 in CLVS mode.
Bottom hold at a cycle of RFCK/16 in CLVS mode.
Peak hold at a cycle of RFCK/4 in CLVS mode.
Peak hold at a cycle of RFCK/2 in CLVS mode.
Command
D3
DCLV
PWM MD
TB
TP
Gain
CLVS
VP7
VP6
VP5
VP4
VP3
VP2
VP1
VP0
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 1
Data 2
CLV CTRL
Data 3
See the $CX commands.
Command bit
Description
VP0 to 7 = F0 (H)
.
.
.
VP0 to 7 = E0 (H)
Playback at half (normal) speed
to
Playback at normal (double) speed
The rotational velocity R of the spindle can be
expressed with the following equation.
R =
32
256 ≠ n
R: Relative velocity at normal speed = 1
n: VP0 to 7 setting value
Note)
∑ Values in parentheses are for when DSPB is 1.
∑ Values when crystal is 16.9344 MHz and XTSL is low or when crystal is 33.8688 MHz and XTSL is high.
∑ VP0 to 7 setting values are valid in CAV-W mode.
2
R≠Relative velocity [multiple]
1.5
1
0.5
F0
E0
VP0 to 7 setting value [HEX]
DSPB = 1
DSPB = 0
Fig. 1-1

≠ 29 ≠
CXD2529Q
$EX commands
Command
Data 1
CLV mode
CM3
CM2
CM1
CM0
D3
D2
D1
D0
Data 2
EPWM SPDC
ICAP
SFSL
D3
D2
D1
D0
Data 3
VC2C
HIFC
LPWR VPON
D3
D2
D1
D0
Command bit
CM3
CM2
CM1
Description
Spindle stop mode.
1
Spindle forward rotation mode.
1
Spindle reverse rotation mode. Valid only when LPWR = 0,
in any modes.
1
Rough servo mode. When the RF-PLL circuit isn't locked,
this mode is used to adjust the disc rotations within the RF-
PLL capture range.
PLL servo mode.
Automatic CLVS/CLVP switching mode.
Used for normal playback.
0
1
1
1
1
0
0
0
0
1
1
1
0
0
1
1
1
1
CM0
0
0
0
0
1
0
Mode
STOP
KICK
BRAKE
CLVS
CLVP
CLVA
1
See the Timing Charts 1-2 to 1-7.
Command bit
EPWM SPDC
ICAP
Description
Crystal reference CLV servo.
Used for playback in CLV-W
mode.
2
Spindle control with VP0 to 7.
Spindle control with the
external PWM.
0
0
0
1
0
0
1
0
0
0
1
1
SFSL
0
0
0
0
VC2C
0
1
0
0
HIFC
0
1
1
1
LPWR
0
0
0
0
VPON
0
0
1
1
Mode
CLV-N
CLV-W
CAV-W
CAV-W
2
Figs. 3-1 and 3-2 show the control flow with the microcomputer software in CLV-W mode.

≠ 30 ≠
CXD2529Q
Command
Data 4
SPD mode
Gain
CAV1
Gain
CAV0
FCSW
0
D3
D2
D1
D0
Gain
CAV1
0
0
1
1
Gain
CAV0
0
1
0
1
Gain
0dB
≠6dB
≠12dB
≠18dB
∑ This sets the gain when controlling the spindle with the phase comparator
in CAV-W mode.
Command bit
FCSW = 0
FCSW = 1
The VPCO2 pin is not used and is high impedance.
The VPCO2 pin is used and the pin signal is the same as VPCO1.
Processing

≠ 31 ≠
CXD2529Q
Mode
CLV-N
CLV-W
CAV-W
DCLV
PWM MD
0
1
0
0
LPWR
0
0
0
1
0
1
Command
KICK
BRAKE
STOP
KICK
BRAKE
STOP
KICK
BRAKE
STOP
KICK
BRAKE
STOP
KICK
BRAKE
STOP
KICK
BRAKE
STOP
1-2 (a)
1-2 (b)
1-2 (c)
1-3 (a)
1-3 (b)
1-3 (c)
1-4 (a)
1-4 (b)
1-4 (c)
1-5 (a)
1-5 (b)
1-5 (c)
1-6 (a)
1-6 (b)
1-6 (c)
1-7 (a)
1-7 (b)
1-7 (c)
Timing chart
Mode
CLV-N
CLV-W
CAV-W
DCLV
PWM MD
LPWR
0
1
0
0
0
0
0
1
0
1
0
1
1-8
1-9
1-10
1-11
1-12 (EPWM = 0)
1-13 (EPWM = 0)
1-14 (EPWM = 1)
1-15 (EPWM = 1)
Timing chart
Note) The CLV-W and CAV-W modes support control only by the ternary output of the MDP pin. Therefore,
when using the CLV-W and CAV-W modes, set DCLV PWM MD to 0.

≠ 32 ≠
CXD2529Q
Timing Chart 1-2
CLV-N mode
DCLV PWM MD = LPWR = 0
Z
KICK
MDS
MDP
H
MON
H
(a) KICK
Z
BRAKE
MDS
MDP
MON
H
(b) BRAKE
Z
STOP
MDS
MDP
MON
(c) STOP
Z
L
Z
L
Z
Timing Chart 1-3
CLV-N mode
DCLV PWM MD = 1, LPWR = 0
KICK
MDS
MDP
H
MON
H
(a) KICK
BRAKE
MDS
MDP
MON
H
(b) BRAKE
STOP
MDS
MDP
MON
(c) STOP
L
L
H
L
L
L
H
Timing Chart 1-4
CLV-W mode (when following the spindle rotational velocity) DCLV PWM MD = LPWR = 0
Z
KICK
MDS
MDP
H
MON
H
(a) KICK
Z
BRAKE
MDS
MDP
MON
H
(b) BRAKE
Z
STOP
MDS
MDP
MON
(c) STOP
Z
L
Z
L
Z

≠ 33 ≠
CXD2529Q
Timing Chart 1-5
CLV-W mode (when following the spindle rotational velocity) DCLV PWM MD = 0, LPWR = 1
Z
KICK
MDS
MDP
H
MON
H
(a) KICK
Z
BRAKE
MDS
MDP
MON
H
(b) BRAKE
Z
Z
STOP
MDS
MDP
MON
(c) STOP
Z
L
Z
Timing Chart 1-6
CAV-W mode DCLV PWM MD = LPWR = 0
Z
KICK
MDS
MDP
H
MON
H
(a) KICK
Z
BRAKE
MDS
MDP
MON
H
(b) BRAKE
Z
STOP
MDS
MDP
MON
(c) STOP
Z
L
H
Timing Chart 1-7
CAV-W mode DCLV PWM MD = 0, LPWR = 1
Z
KICK
MDS
MDP
H
MON
H
(a) KICK
Z
BRAKE
MDS
MDP
MON
H
(b) BRAKE
Z
Z
STOP
MDS
MDP
MON
(c) STOP
Z
H

≠ 34 ≠
CXD2529Q
Timing Chart 1-8
CLV-N mode
DCLV PWM MD = LPWR = 0
Z
MDS
MDP
Acceleration
Z
Deceleration
132kHz
7.6µs
n ∑ 236 (ns) n = 0 to 31
Timing Chart 1-9
CLV-N mode
DCLV PWM MD = 1, LPWR = 0
MDS
MDP
Acceleration
Deceleration
132kHz
7.6µs
n ∑ 236 (ns) n = 0 to 31
Timing Chart 1-10
CLV-W mode
DCLV PWM MD = LPWR = 0
Z
MDS
MDP
Acceleration
Z
Deceleration
264kHz
3.8µs
Timing Chart 1-11
CLV-W mode
DCLV PWM MD = 0, LPWR = 1
Z
MDS
MDP
Acceleration
Z
264kHz
3.8µs
The BRAKE pulse is masked when LPWR = 1.

≠ 35 ≠
CXD2529Q
Timing Chart 1-12
CAV-W mode EPWM = DCLV PWM MD = LPWR = 0
MDP
Acceleration
Z
Deceleration
264kHz
3.8µs
Timing Chart 1-13
CAV-W mode EPWM = DCLV PWM MD = 0, LPWR = 1
MDP
Acceleration
Z
264kHz
3.8µs
The BRAKE pulse is masked when LPWR = 1.
Timing Chart 1-14
CAV-W mode EPWM = 1, DCLV PWM MD = LPWR = 0
PWMI
MDP
H
L
H
L
Acceleration
Deceleration
Timing Chart 1-15
CAV-W mode EPWM = 1, DCLV PWM MD = 0, LPWR = 1
PWMI
MDP
H
L
H
Z
Acceleration
The BRAKE pulse is masked when LPWR = 1.
Note) The CLV-W and CAV-W modes support control only by the ternary output of the MDP pin.
Therefore, when using the CLV-W and CAV-W modes, set DCLV PWM MD to 0.

≠ 36 ≠
CXD2529Q
1-2. Description of SENS Output
The following signals are output from SENS, depending on the microcomputer serial register value (latching
not required).
Note that the SENS output can be read out from the SQSO pin when SOCT = 0, SL1 = 1 and SL0 = 0. (See
the $BX commands.)
2. Subcode Interface
This section explains the subcode interface.
There are two methods for reading out a subcode externally. The 8-bit subcodes P to W can be read out from
SBSO by inputting EXCK to the CXD2529Q.
Sub Q can be read out after the CRC check of the 80 bits of data in the subcode frame. This is accomplished,
after checking SCOR and CRCF, by inputting 80 clock pulses to SQCK and reading out the data from the
SQSO pin.
2-1. P to W Subcode Read
Data can be read out by inputting EXCK immediately after WFCK falls. (See the Timing Chart 2-1.)
2-2. 80-bit Sub Q Read
Fig. 2-1 shows the peripheral block of the 80-bit Sub Q register.
∑ First, Sub Q, regenerated at one bit per frame, is input to the 80-bit serial/parallel register and the CRC check
circuit.
∑ 96-bit Sub Q is input, and if the CRC is OK, it is output to SQSO with CRCF = 1. In addition, the 80 bits are
loaded into the parallel/serial register.
When SQSO goes high 400µs or more (monostable multivibrator time constant) after the subcode is read
out, the CPU determines that new data (which passed the CRC check) has been loaded.
∑ In the CXD2529Q, when 80-bit data is loaded, the order of the MSB and LSB is inverted for each byte. As a
result, although the sequence of bytes is the same, the bits within the bytes are now ordered LSB first.
∑ Once the fact that the 80-bit data has been loaded is confirmed, SQCK is input so that the data can be read
out. In the CXD2529Q, the SQCK input is detected, and when it is low the retriggerable monostable
multivibrator is reset.
∑ The retriggerable monostable multivibrator has a time constant from 270 to 400µs. When the duration for
which SQCK is high is less than this time constant, the monostable multivibrator is kept reset; during this
interval, the S/P register is not loaded into the P/S register.
∑ While the monostable multivibrator is being reset, data cannot be loaded in the 80-bit parallel/serial register.
In other words, while reading out with a clock cycle shorter than the monostable multivibrator time constant,
the register is not rewritten by CRCOK, etc. (See the Timing Chart 2-2.)
∑ Although a clock is input from the SQCK pin to actually perform these operations, the high and low intervals
for this clock should be between 750ns and 120µs.
SEIN, a signal input to this LSI from the SSP, is output.
Low while the auto sequencer is in operation, high when operation
terminates.
Outputs the signal input to the FOK pin. Normally, FOK (from RF) is
input. High for "focus OK".
SEIN, a signal input to this LSI from the SSP, is output.
High when the regenerated frame sync is obtained with the correct
timing.
Low when the EFM signal, after passing through the sync detection
filter, is lengthened by 64 channel clock pulses or more.
SENS pin is fixed to low.
SEIN
XBUSY
FOK
SEIN
GFS
OV64
"L"
$0X, 1X, 2X, 3X
$4X
$5X
$6X
$AX
$EX
$7X, 8X, 9X, BX,
CX, DX, FX
Microcomputer serial register
value (latching not required)
SENS
output
Meaning

≠ 37 ≠
CXD2529Q
Timing Chart 2-1
Internal
PLL clock
4.3218 ±
MHz
WFCK
SCOR
EXCK
SBSO
400ns max.
S0 ∑ S1
Q
R
WFCK
SCOR
EXCK
SBSO
S0∑S1 Q R S T U V W
S0∑S1
P1
Q R S T U V W
P1
P2
P3
Same
Same
Sub Code P.Q.R.S.T.U.V.W Read Timing

≠ 38 ≠
CXD2529Q
Fig. 2-1. Block Diagram
SUBQ
SIN
A B C D E F G H
(AFRAM)
H G F E D C B A
(ASEC)
(AMIN)
80bit S/P Register
ADDRS CTRL
8
8
8
Order
Inversion
8
8
8
8
8
8
SI
LD
LD
LD
LD
LD
LD
LD
LD
80bit P/S Register
SO
SHIFT
SQCK
CRCF
Mix
SQSO
Mono/Multi
CRCC
SUBQ
SHIFT

≠ 39 ≠
CXD2529Q
Timing Chart 2-2
1
2
3
91
92
93
94
95
96
97
98
WFCK
SCOR
SQSO
SQCK
Mono/multi (Internal)
Order
Inversion
CRCF1
Determined by mode
L
CRCF2
80 Clock
Registere load forbidder
270 to 400µ
s for SQCK = High
750ns to 120µ
s
300ns max.
CRCF
ADR0
ADR1
ADR2
ADR3
CTL0
CTL1
CTL2
CTL3
SQCK
SQSO
1
2
3

≠ 40 ≠
CXD2529Q
Timing Chart 2-3
Measurement interval
(approximately 3.8µs)
Reference window
(132.2kHz)
Measurement pulse
(VCKI/2)
Measurement counter
VF0 to 7
Load
m
The relative velocity R of the disc can be expressed with the following equation.
R =
(R: Relative velocity, m: Measurement results)
VF0 to 7 is the result obtained by counting VCKI/2 pulses while the reference signal (132.2kHz) generated
from the crystal (384Fs) is high. This count is 31 when the disc is rotating at normal speed and 63 when it is
rotating at double speed (when DSPB is low).
m + 1
32

≠ 41 ≠
CXD2529Q
3. Description of Modes
This LSI has three basic operating modes using a combination of spindle control and the PLL. The operations
for each mode are described below.
3-1. CLV-N mode
This mode is compatible with the CXD2507AQ, and operation is the same as the CXD2507AQ. Accordingly,
the PLL capture range is ±150kHz.
3-2. CLV-W mode
This is the wide capture range mode. This mode allows the PLL to follow the rotational velocity of the disc.
This rotational following control has two types: using the built-in VCO2 or providing an external VCO. The
spindle is the CLV servo like the CXD2507AQ. Operation using the built-in VCO2 is described below. (When
using an external VCO, input the signal from the VPCO pin to the low-pass filter, use the output from the low-
pass filter as the control voltage for the external VCO, and input the oscillation from the VCO to the VCKI
pin.)
While starting to rotate a disc and/or speeding up to the lock range speed from the condition that a disc
stops, CAV-W mode should be used. Specifically, first send $E665X to set CAV-W mode and kick a disc,
then send $E60C to set CLV-W mode if ALOCK is high, which can be read out serially from the SQSO pin.
CLV-W mode is used for playback while ALOCK is high. The microcomputer monitors the serial data output,
and must return to adjust-speed operation (CAV-W mode) when ALOCK becomes low. The control flow
according to the microcomputer software in CLV-W mode is shown in Fig. 3-2.
In CLV-W mode (normal), low power consumption is achieved by setting LPWR to high. Control was formerly
performed by applying acceleration and deceleration pulses to the spindle motor. However, when LPWR is
set to high, deceleration pulses are not output, thereby achieving low power consumption mode.
CLV-W mode supports control only by the ternary output of the MDP pin. Therefore, when using CLV-W
mode, set DCLV PWM MD to low.
Note) The capture range for this mode is theoretically up to the signal processing limit.
3-3. CAV-W mode
This is the CAV mode. In this mode, the external clock is fixed but the spindle rotational velocity can be
controlled as desired. The rotational velocity is determined by the VP0 to 7 setting values or the external
PWM. When controlling the spindle with VP0 to 7, setting the CAV-W mode with the $E665 command and
controlling VP0 to 7 with the $DX commands allows the rotational velocity to be varied from low speed to
double speed. (See the $DX commands.) Also, when controlling the spindle with the external PWM, the
PWMI pin is binary input which becomes KICK during high intervals and BRAKE during low intervals.
The microcomputer can know the rotational velocity using the V16M oscillation frequency. The reference
frequency for the velocity measurement is the 132.3kHz signal obtained by dividing the crystal (384Fs) by
128. The velocity is obtained by counting V16M/2 pulses while the reference is high, and the result is output
from the new CPU interface as 8 bits (VP0 to 7). These measurement results are 31 when the disc is rotating
at normal speed or 63 when it is rotating at double speed. These values match those of the 256-n for control
with VP0 to 7.
In CAV-W mode, the spindle is set to the desired rotational velocity and the operation speed for the entire
system follows this rotational velocity. Therefore, the cycles for the Fs system clock, PCM data and all other
output signals from this LSI change according to the rotational velocity of the disc (except for DATO, CLKO
and XLTO).
Note) The capture range for this mode is theoretically up to the signal processing limit.

≠ 42 ≠
CXD2529Q
CAV-W
CLVS
CLV-W
CLVP
Rotational velocity
Target velocity
Operation mode
Spindle mode
Time
KICK
LOCK
ALOCK
Fig. 3-1. Disc Stop to Normal Condition in CLV-W Mode
CLV-W Mode
NO
YES
KICK $E800
Mute OFF $A000
ALOCK = H ?
NO
YES
ALOCK = L ?
CLV-W MODE
START
CAV-W $E665
(CLVA)
CLV-W $E60C
(CLVA)
(WFCK PLL)
Fig. 3-2. CLV-W Mode Flow Chart

≠ 43 ≠
CXD2529Q
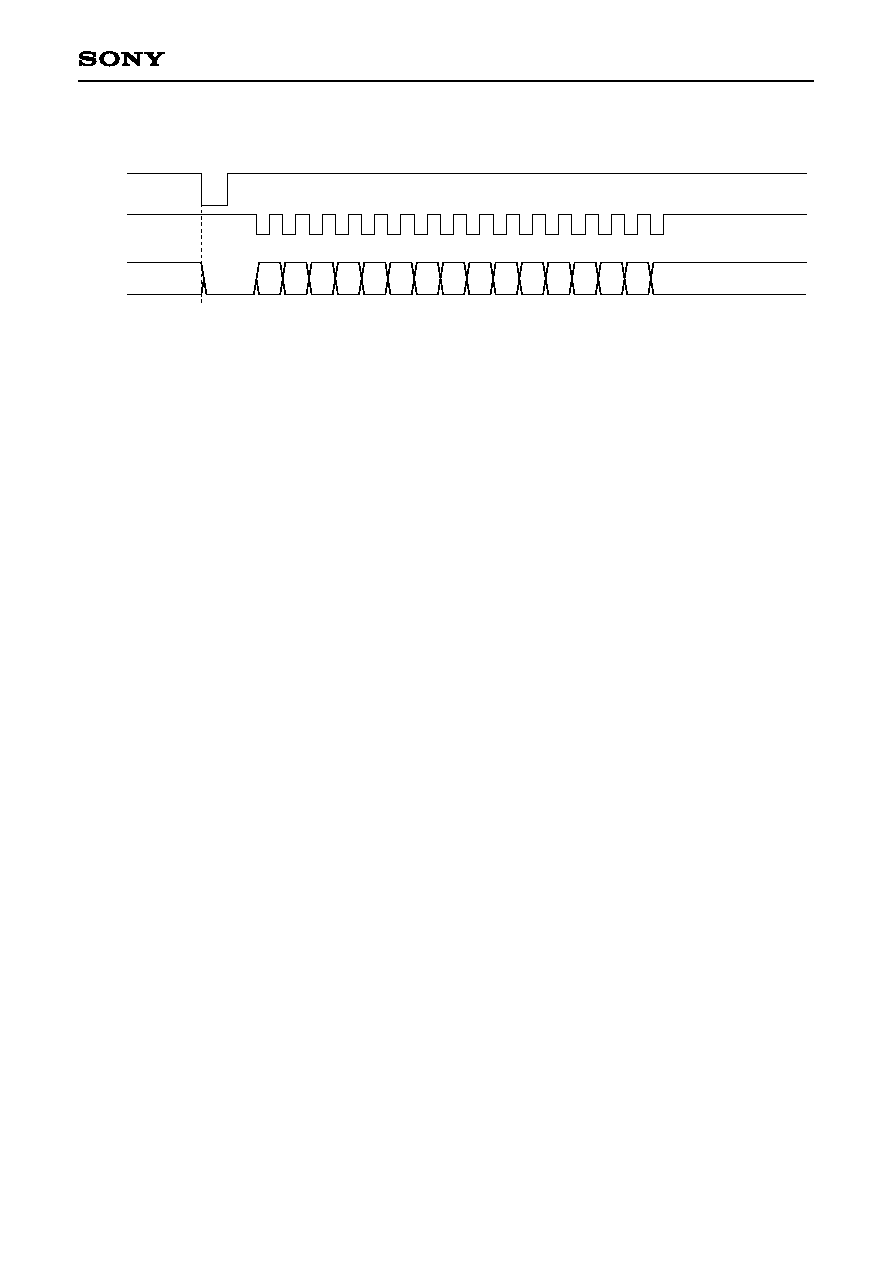
4. Description of Other Functions
4-1. Channel Clock Regeneration by the Digital PLL Circuit
∑ The channel clock is necessary for demodulating the EFM signal regenerated by the optical system.
Assuming T as the channel clock cycle, the EFM signal is modulated in an integer multiple of T from 3T to
11T. In order to read out the information in the EFM signal, this integer value must be read correctly. As a
result, T, that is the channel clock, is necessary.
In an actual player, PLL is necessary to regenerate the channel clock because the fluctuation in the spindle
rotation alters the width of the EFM signal pulses.
The block diagram of this PLL is shown in Fig. 4-1.
The CXD2529Q has a built-in three-stage PLL.
∑ The first-stage PLL is for the wide-band PLL. When the built-in VCO2 is used, LPF is required externally.
When the built-in VCO2 is not used, LPF and VCO are required externally.
The output of this first-stage PLL is used as a reference for all clocks within the LSI.
∑ The second-stage PLL generates a high-frequency clock needed by the third-stage digital PLL.
∑ The third-stage PLL is a digital PLL that regenerates the actual channel clock.
∑ The new digital PLL in CLV-W mode follows the rotational velocity of the disc, in addition to the
conventional secondary loop.
≠ 44 ≠
CXD2529Q
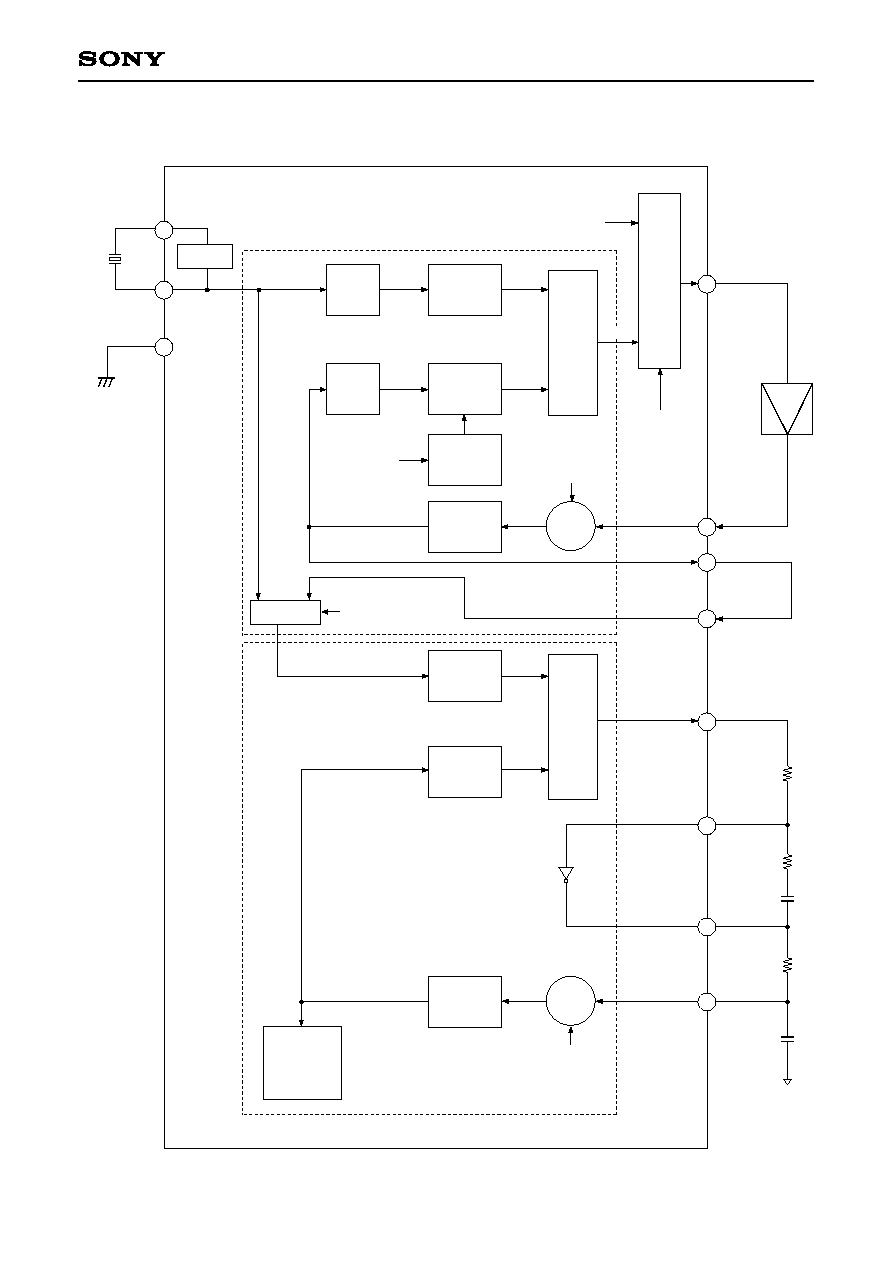
Block Diagram 4-1
X'tal
XTSL
OSC
1/2
1/32
1/n
1/2
Microcomputer
control
n = 1 to 256
(VP7 to 0)
1/K
(KSL1, 0)
CLV-W
CAV-W
Spindle rotation information
CLV-N
CLV-W
CAV-W
/CLV-N
Phase comparator
Selector
LPF
2/1 MUX
VPON
1/M
1/N
VCOSEL2
VCO2
Phase comparator
VCO1
VCOSEL1
1/K
(KSL3, 2)
Digital PLL
RFPLL
VPCO
VCTL
V16M
VCKI
PCO
FILI
FILO
CLTV
CXD2529Q

≠ 45 ≠
CXD2529Q
4-2. Frame Sync Protection
∑ In a CD player operating at normal speed, a frame sync is recorded approximately every 136µs (7.35kHz).
This signal is used as a reference to know which data is the data within a frame. Conversely, if the frame
sync cannot be recognized, the data is processed as error data because it cannot be recognized what the
data is. As a result, recognizing the frame sync properly is extremely important for improving playability.
∑ In the CXD2529Q, window protection and forward protection/backward protection have been adopted for
frame sync protection. The adoption of these functions achieves very powerful frame sync protection.
There are two window widths: one for cases where a rotational disturbance affects the player and the other
for cases where there is no rotational disturbance (WSEL = 0/1). In addition, the forward protection counter is
fixed to 13, and the backward protection counter is fixed to 3. In other words, when the frame sync is being
played back normally and then cannot be detected due to scratches or other problems, a maximum of 13
frames are inserted. If the frame sync cannot be detected for 13 frames or more, the window is released and
the frame sync is resynchronized.
In addition, immediately after the window is released and resynchronization is executed, if a proper frame
sync cannot be detected within 3 frames, the window is released immediately.
4-3. Error Correction
∑ In the CD format, one 8-bit data contains two error correction codes, C1 and C2. For C1 correction, the code
is created with 28-byte information and 4-byte C1 parity.
For C2 correction, the code is created with 24-byte information and 4-byte parity.
Both C1 and C2 are Reed-Solomon codes with a minimum distance of 5.
∑ The CXD2529Q SEC strategy provides excellent playability through powerful frame sync protection and C1
and C2 error corrections.
∑ The correction status can be monitored outside the LSI.
See Table 4-1.
∑ When the C2 pointer is high, the data in question was uncorrectable. Either the pre-value was held for that
data, or an average value interpolation was made.
MNT3
0
0
0
1
1
1
MNT1
0
0
1
0
0
1
MNT0
0
1
1
0
1
1
Description
No C1 errors
One C1 error corrected
C1 correction impossible
No C2 errors
One C2 error corrected
C2 correction impossible
Table 4-1.
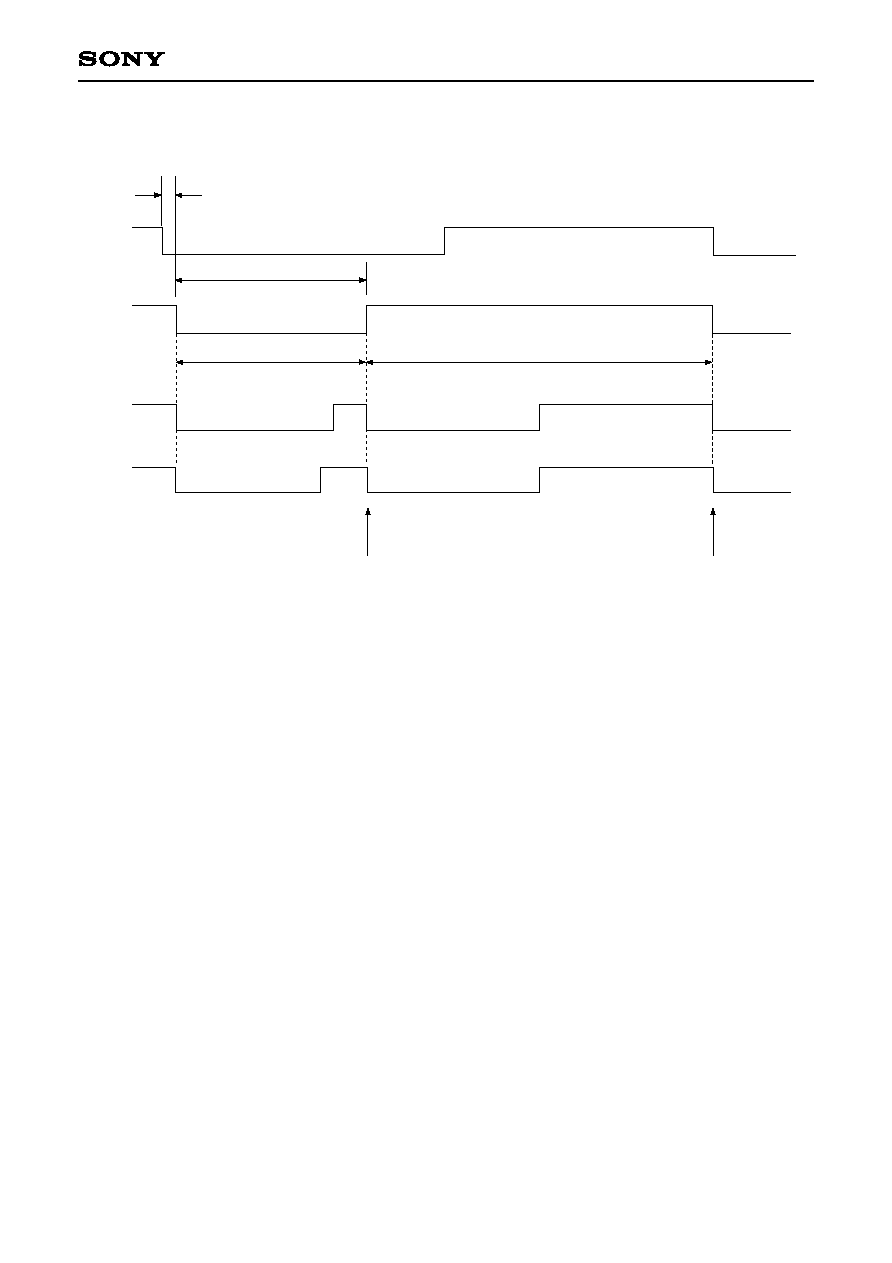
≠ 46 ≠
CXD2529Q
Timing Chart 4-1
Normal-speed PB
400 to 500ns
RFCK
MNT3
MNT1
MNT0
t = Dependent on error
condition
C1 correction
C2 correction
Strobe
Strobe
4-4. DA Interface
∑ The CXD2529Q DA interface is as described below.
This interface includes 48 cycles of the bit clock within one LRCK cycle, and is MSB first. When LRCK is
high, the data is for the left channel.
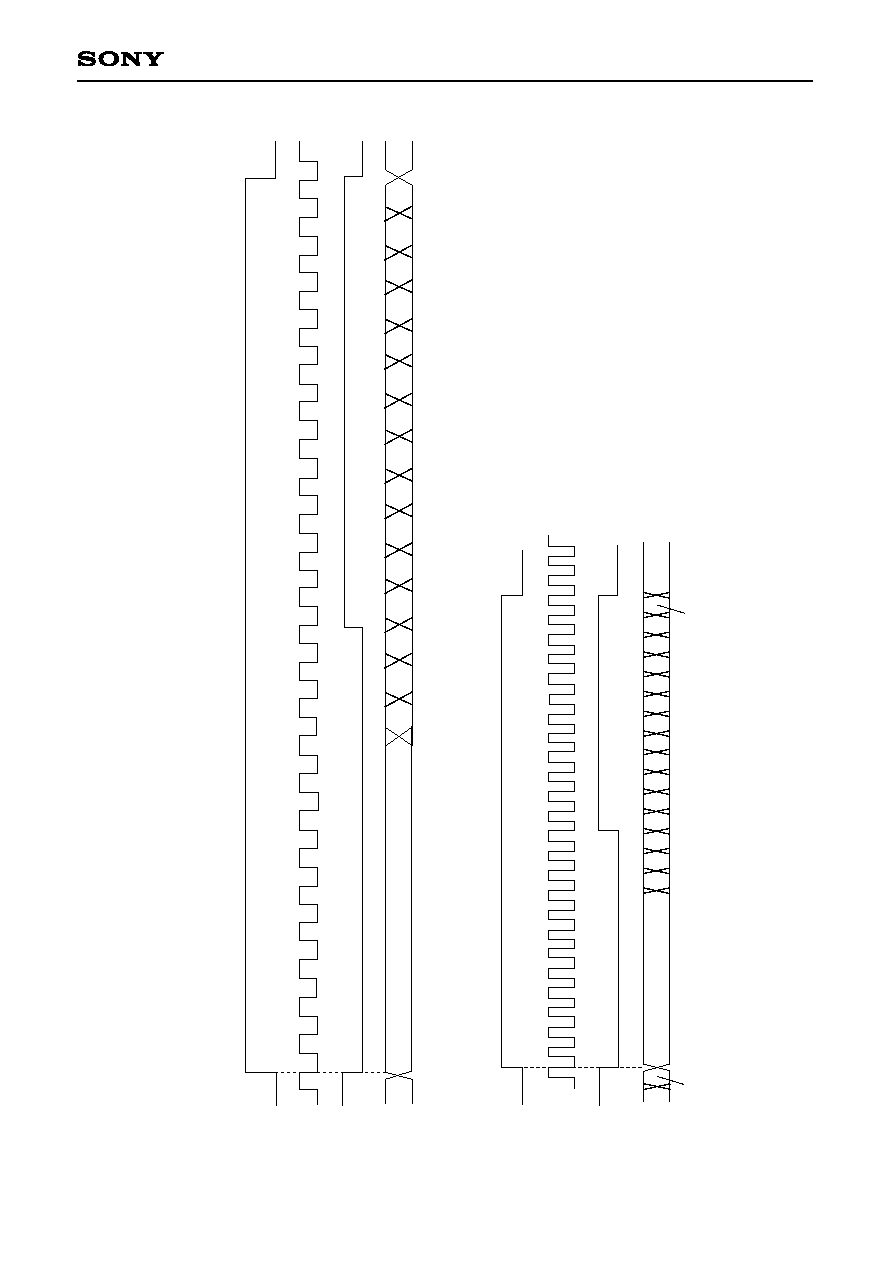
≠ 47 ≠
CXD2529Q
Timing Chart 4-2
LRCK
(44.1k)
BCK
(2.12M)
WDCK
PCMD
LRCK
(88.2k)
BCK
(4.23M)
WDCK
PCMD
48bit slot Normal-Speed Playback
1
24
R0
Lch MSB (15)
L14
L13
L12
L11
L10
L9
L8
L7
L6
L5
L4
L3
L2
L1
L0
RMSB
R0
Lch MSB (15)
24
Rch MSB
23
4
5
67
89
1
0
1
1
1
2
48bit slot Double-Speed Playback
12
L0

≠ 48 ≠
CXD2529Q
4-5. Digital Out
There are three Digital Out formats: the type 1 format for broadcasting stations, the type 2 form 1 format for
home use, and the type 2 form 2 format for the manufacture of software.
The CXD2529Q supports type 2 form 1.
Sub Q data which are matched twice in succession after a CRC check are input to the first four bits (bit 0 to
3) of the channel status.
Table 4-2.
4-6. Servo Auto Sequencer
This function performs a series of controls, including auto focus and track jumps. When the auto sequence
command is received from the CPU, auto focus, 1-track jump, 2N-track jumps, and N-track move are
executed automatically.
SSP (servo signal processor LSI) is used in an exclusive manner during the auto sequence execution (when
XBUSY = low), so that commands from the CPU are not transferred to the SSP, but can be sent to the
CXD2529Q.
Connect the CPU, RF and SSP as shown in Fig. 4-2.
When CLOK goes from low to high while XBUSY is low, XBUSY does not become high for a maximum of
100µs after that point. This is designed to prevent the transfer of erroneous data to the SSP when XBUSY
changes from low to high by the monostable multivibrator, which is reset by CLOK being low (when XBUSY
is low).
0
0 0 0 0 0 0 0 0 0 0 0 0 0
0/1
0 0
0
ID0
ID1 COPY Emph
0 0 0 0 1
0 0 0 0 0 0 0
From sub Q
0
16
32
48
176
Bits 0 to 3... Sub Q control bits that matched twice with CRCOK
Bit 29
... 1 when VPON is 1
Digital Out C bit
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15

≠ 49 ≠
CXD2529Q
(a) Auto Focus ($47)
Focus search-up is performed, FOK and FZC are checked, and the focus servo is turned on.
If $47 is received from the CPU, the focus servo is turned on according to Fig. 4-3. The auto focus starts with
focus search-up, and the pickup should be lowered beforehand (focus search-down). In addition, blind E of
register 5 is used to eliminate FZC chattering. In other words, the focus servo is turned on at the falling edge
of FZC after FZC has been continuously high for a longer time than E.
Connection diagram for using auto sequencer (example)
Fig. 4-2.
Fig. 4-3-(a). Auto Focus Flow Chart
RF
FOK
SSP
C. out
SENS
DATA
CLK
XLT
CNIN
FOK
DATA
CLOK
XLAT
SENS
Micro-computer
CXD2529Q
SEIN
DATO
CLKO
XLTO
Auto focus
Focus search up
FOK = H
NO
YES
FZC = H
NO
YES
FZC = L
NO
YES
END
Focus servo ON
(Checks whether FZC is continuously high for
the period of time E set with register 5)

≠ 50 ≠
CXD2529Q
Fig. 4-3-(b). Auto Focus Timing Chart
(b) Track Jump
1, 10, and 2N-track jumps are performed respectively. Always use this when focus, tracking, and the sled
servo are on. Note that tracking gain-up and braking-on should be sent beforehand because they are not
performed.
∑ 1-track jump
When $48 ($49 for REV) is received from the CPU, a FWD (REV) 1-track jump is performed in accordance
with Fig. 4-4. Set blind A and brake B with register 5.
∑ 10-track jump
When $4A ($4B for REV) is received from the CPU, a FWD (REV) 10-track jump is performed in accordance
with Fig. 4-5. The principal difference between the 10-track jump and the 1-track jump is whether to kick the
sled or not. In addition, after kicking the actuator, when 5 tracks have been counted through CNIN, the brake
is applied to the actuator. Then, when the actuator speed is found to have slowed up enough (determined by
the CNIN cycle becoming longer than the overflow C set in register 5), the tracking and sled servos are
turned on.
∑ 2N-track jump
When $4C ($4D for REV) is received from the CPU, a FWD (REV) 2N-track jump is performed in accordance
with Fig. 4-6. The track jump count "N" is set in register 7. Although N can be set to 2
16
tracks, note that the
setting is actually limited by the actuator. CNIN is used for counting the number of jumps.
Although the 2N track jump basically follows the same sequence as the 10-track jump, the one difference is
that after the tracking servo is turned on, the sled continues to move only for "D", set in register 6.
∑ N-track move
When $4E ($4F for REV) is received from the CPU, a FWD (REV) N-track move is performed in accordance
with Fig. 4-7. N can be set to a maximum of 2
16
tracks. CNIN is used for counting the number of jumps. This
N-track move uses a method in which only the sled is moved, and is suited for moves over thousands of
tracks.
XLT
$47latch
$03
Blind E
$08
FOK
SEIN (FZC)
BUSY
Command for
SSP

≠ 51 ≠
CXD2529Q
Fig. 4-4-(a). 1-Track Jump Flow Chart
Track
NO
YES
END
Track FWD kick
sled servo OFF
WAIT
(Blind A)
CNIN =
Track REV
kick
WAIT
(Brake B)
Track, sled
servo ON
(FWD kick for REV jump)
(REV kick for REV jump)
Fig. 4-4-(b). 1-Track Jump Timing Chart
XLT
$48 (REV = $49) latch
$28 ($2C)
Blind A
Brake B
$2C ($28)
$25
CNIN
BUSY
Command for
SSP

≠ 52 ≠
CXD2529Q
Fig. 4-5-(a). 10-Track Jump Flow Chart
10 Track
NO
YES
END
Track, sled
FWD kick
WAIT
(Blind A)
CNIN = 5 ?
Track, REV
kick
Track, sled
servo ON
(Checks whether the CNIN cycle
is longer than overflow C)
(Counts CNIN
◊
5)
NO
YES
C = Overflow ?
Fig. 4-5-(b). 10-Track Jump Timing Chart
XLT
$4A (REV = $4B) latch
Blind A
$2A ($2F)
CNIN 5 count
$2E ($2B)
Overflow C
$25
CNIN
BUSY
Command for
SSP
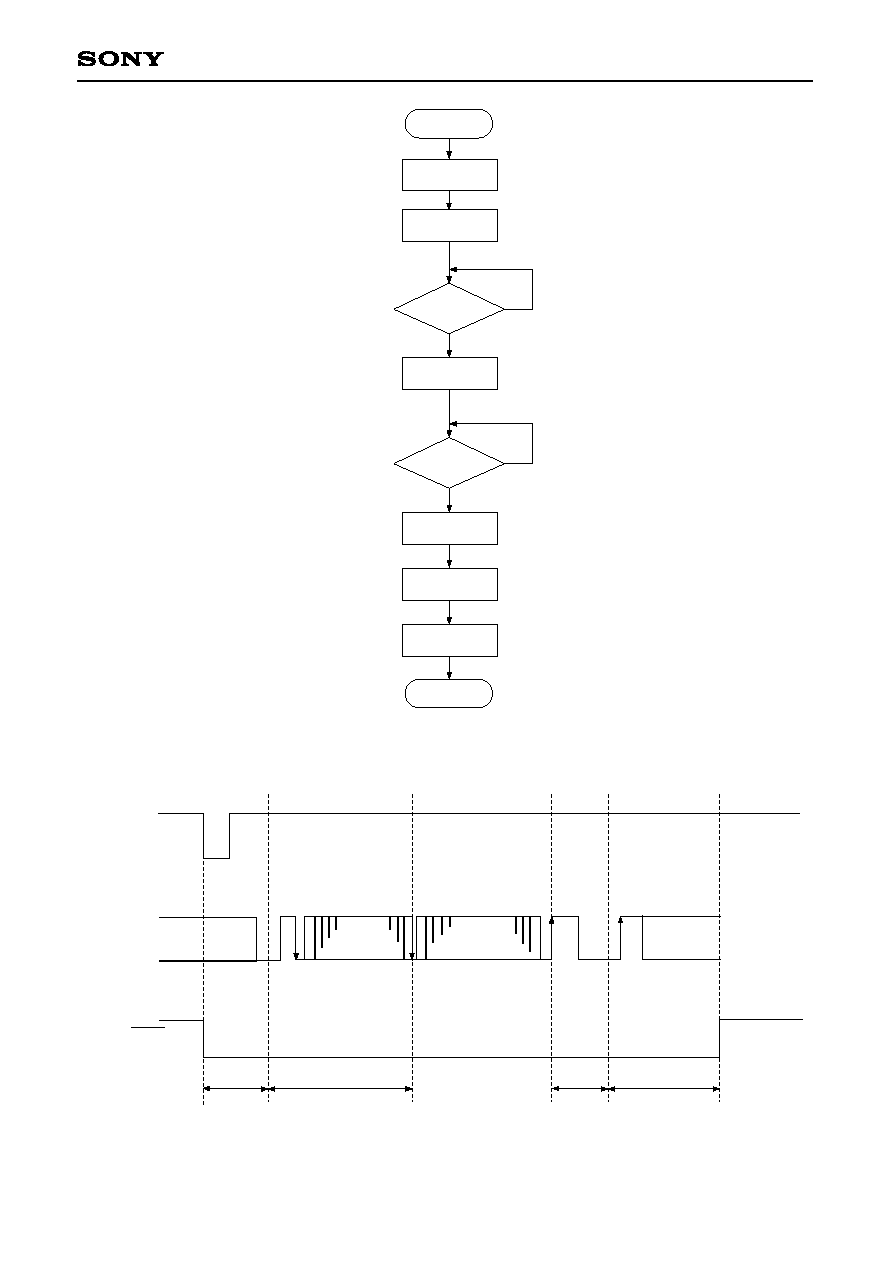
≠ 53 ≠
CXD2529Q
Fig. 4-6-(a). 2N-Track Jump Flow Chart
2N Track
NO
YES
END
Track, sled
FWD kick
WAIT
(Blind A)
CNIN = N
Track REV
kick
Track servo
ON
NO
YES
C = Overflow
WAIT
(Kick D)
Sled servo
ON
Fig. 4-6-(b). 2N-Track Jump Timing Chart
XLT
Blind A
$2A ($2F)
CNIN
N count
$2E ($2B)
Overflow
Kick D
$26 ($27)
$25
$4C (REV = $4D) latch
CNIN
BUSY
Command for
SSP
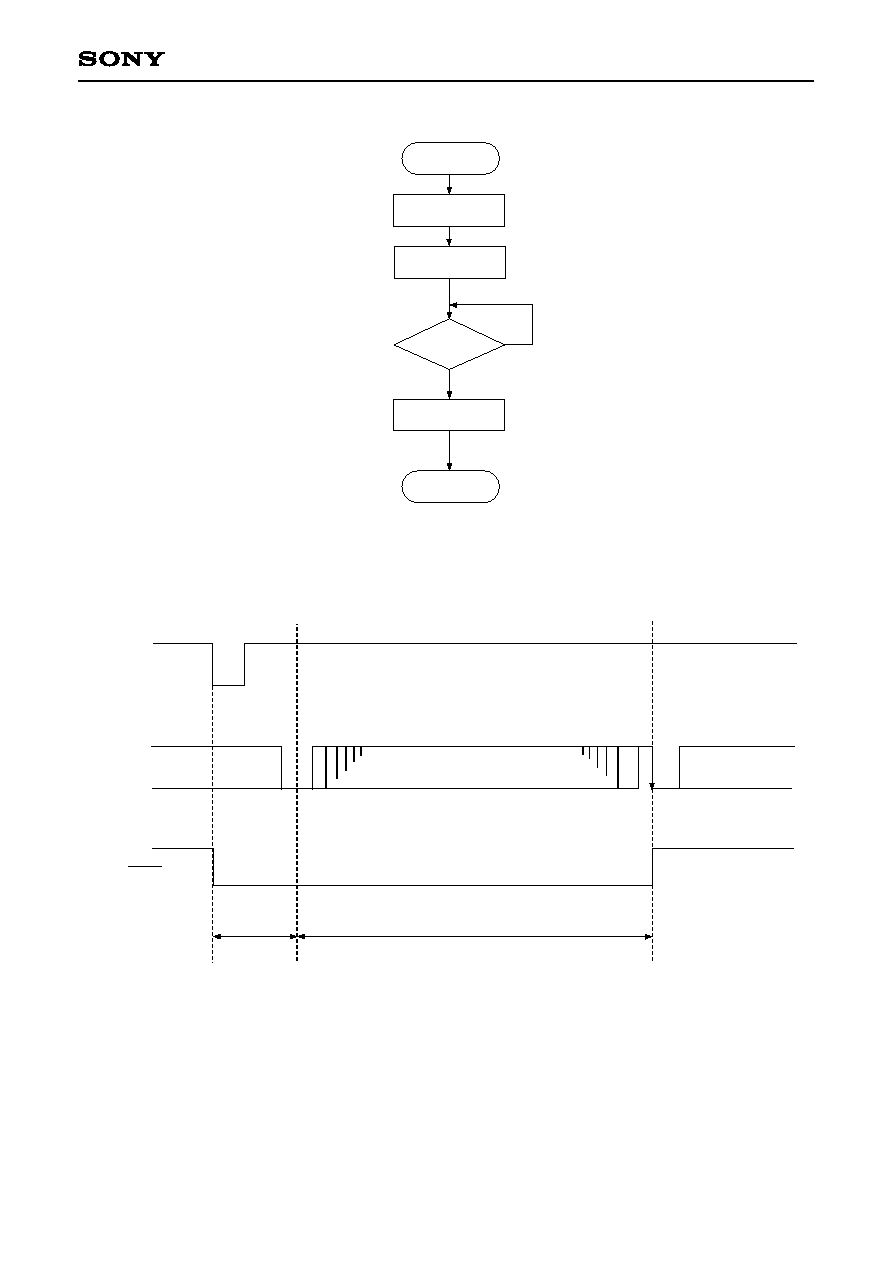
≠ 54 ≠
CXD2529Q
Fig. 4-7-(a). N-Track Move Flow Chart
N Track move
NO
YES
END
Track servo OFF
Sled FWD kick
WAIT
(Blind A)
CNIN = N
END
Track, sled
servo OFF
Fig. 4-7-(b). N-Track Move Timing Chart
XLT
$22 ($23)
Blind A
CNIN N count
$20
$4E (REV = $4F) latch
CNIN
BUSY
Command for
SSP

≠ 55 ≠
CXD2529Q
4-7. Digital CLV
Fig. 4-8 shows the Block Diagram. Digital CLV allows PWM output in CLVS, CLVP and other modes with the
MDS error and MDP error signal sampling frequency increased to 130kHz during normal-speed operation.
In addition, the digital spindle servo can set the gain.
MDP
Digital CLV
CLVS U/D
MDS Error
MDP Error
CLV P/S
Measure
Measure
2/1 MUX
Over Sampling
Filter-1
Gain
MDS
1/2
MUX
CLV P/S
Over Sampling
Filter-2
Noise Shape
Modulation
KICK, BRAKE, STOP
MDS
Mode Select
+
Gain
MDP
DCLVMD, LPWR
PWMI
Fig. 4-8. Block Diagram
CLVS U/D: Up/down signal from the CLVS servo
MDS error: Frequency error for CLVP servo
MDP error: Phase error for CLVP servo
PWMI:
Spindle drive signal from the microcomputer

≠ 56 ≠
CXD2529Q
4-8. Asymmetry Compensation
ASYE
RF
R1
R1
ASYO
ASYI
R1 2
R2 5
=
BIAS
R1
R1
R2
CXD2529Q
44
48
45
46
47
Fig. 4-9. Example of Asymmetry Compensation Application Circuit

≠ 57 ≠
CXD2529Q
5. 1-bit DAC Block
5-1. DAC Block Input Timing
Fig. 5-1 shows the input timing for the DAC block.
In the CXD2529Q, there is no internal transfer of audio data from the CD signal processing block to the DAC
block. Therefore, data can be transferred to the DAC block through an audio DSP or similar device.
When data is input to the DAC block without passing through an audio DSP or similar device, data should be
connected externally. In this case, EMPH, LRCK, BCK and PCMD can be connected directly with EMPHI,
LRCKI, BCKI and PCMDI respectively.
5-2. Description of DAC Block Functions
Zero Data Detection
When the condition where the lower 4 bits of the input data are DC and the remaining upper bits are all "0" or
all "1" continues for approximately 300ms, zero data is detected. Zero data detection is performed
independently for the left and right channels.
Mute Flag Output
The LMUT and RMUT pins become active when any of the following conditions are met.
The polarity can be selected by the $9X command ZDPL.
∑ When zero data is detected.
∑ When a high signal is input to the SYSM pin.
∑ When the $AX command SMUT is set.
Attenuation Operation
Assume attenuation data X1, X2, and X3, where X1 > X3 > X2, and audio outputs Y1, Y2, and Y3, where Y1 >
Y3 > Y2. First, assume X1 is transferred and then X2 is transferred. If X2 is transferred before Y1 is reached
(state "A" in the diagram), then the value continues approaching Y2. Next, if X3 is transferred before Y2 is
reached (either state "B" or "C"), the value begins approaching Y3 from the value at that point ("B" or "C").
A
Y1
B
Y3
C
Y2
23.2 [ms]
≠
00 (H)
0dB
7F (H)

≠ 58 ≠
CXD2529Q
Input Timing for DAC Block
Normal-Speed Playback
LRCKI
(44.1k)
1
24
PCMDI
R0
Lch MSB (15)
L14
L13
L12
L11
L10
L9
L8
L7
L6
L5
L4
L3
L2
L1
L0
RMSB
PCMDI
LRCKI
(88.2k)
Double-Speed Playback
24
R0
Lch MSB (15)
Rch MSB
234
5
6
7
8
9
1
0
1
1
1
2
1
2
L0
BCKI
(4.23M)
BCKI
(2.12M)
Timing Chart 5-1

≠ 59 ≠
CXD2529Q
DAC Block Mute Operation
Soft mute
Soft mute is applied when any of the following conditions are met. Mute is performed, attenuating the input
data.
∑ When attenuation data is set to 000 (h)
∑ When the $AX command SMUT is set to 1
∑ When a high signal is input to the SYSM pin
Forced mute
Forced mute is applied when the $AX command FMUT is set to 1.
The PWM output to the LPF block is fixed to low.
Set OPSL2 to 1 for FMUT setting. (See the description of "$AX commands".)
Zero detection mute
Forced mute is applied when the $9X command ZMUT is set to 1 and the zero data is detected for the left
and right channels.
(See the description of "Zero Data Detection".)
LRCK Synchronization
Synchronization is performed at the first LRCK input falling edge during reset. When the LRCK input
frequency varies, the synchronization is lost. At that time, resynchronization should be executed.
The LRCK input frequency varies to the IC master clock switching and playback speed change when the
high/low levels of the XTSL pin change, $9 command DSPB setting changes or $9X command MCSL setting
changes.
Also, LRCK may be switched when there is another IC between the CD DSP block and DAC block. In this
case resynchronization is required.
In order to perform resynchronization, set the $AX command LRCK to 1 and set LRWO to 0 after one LRCK
cycle or more.
Set LRWO with OPSL2 = 1. (See the description of "$AX commands".)
Set the $9X command SYCOF = 0 in advance when setting LRWO to 1.
Soft mute on
Soft mute off
Soft mute off
23.2 [ms]
23.2 [ms]
0dB
≠
dB

≠ 60 ≠
CXD2529Q
SYCOF
Playback can be simply performed by setting SYCOF of address 9 to 1 when LRCK is connected to LRCKI,
PCMD to PCMDI and BCK to BCK in CAV-W mode.
Normally, the memory proof and the like is used for playback in CAV-W mode.
In this mode, the LRCK output conforms not to the crystal but to the VCO. Therefore, synchronization is
frequently lost.
By setting SYCOF of address 9 to 1, the synchronization loss of the LRCKI input is ignored and the
playback can be simply performed.
However, the playback is not perfect because the pre-value hold or data skip is occurred for the LRCKI input
wow flatter.
Set SYCOF to 0 in all cases except for the playback with LRCK directly connected to LRCKI,
PCMD to PCMDI and BCK to BCK in CAV-W mode.
Set SYCOF to 0 in advance when LRCK resynchronization is applied with LRWO = 0.
Digital Bass Boost
Bass boost without the external parts is possible by the built-in digital filter. The strength of boost has 2
levels; Mid and Max. BSBST and BBSL of address A are used for the setting.
See Graph 5-2 for the digital bass boost frequency response.
Normal
DBB Mid
DBB Max
10.00
≠4.00
6.00
4.00
2.00
0.00
≠2.00
8.00
≠6.00
≠8.00
≠10.00
≠12.00
≠14.00
10
30
100
300
1k
3k
10k
30k
Digital Bass Boost Frequency Response [Hz]
[dB]
Graph 5-2.

≠ 61 ≠
CXD2529Q
Analog out
C2
680p
12k
12k
12k
C1
150p
AOUT1 (2)
AIN1 (2)
LOUT1 (2)
Vc
Fig. 6-1. LPF External Circuit Example
6. LPF Block
The CXD2529Q incorporates a first-stage secondary active LPF and a reference voltage-applied operational
amplifier, which require many resistors and capacitors.
The cut-off frequency fc can be freely set due to the external resistors and capacitors.
Here, the reference voltage (Vc) is (AV
DD
≠ AV
SS
)/2.
Fig. 6-1 shows the LPF block application circuit.
In this circuit, the cut-off frequency is fc
40kHz.
The external capacitors' values when fc = 30kHz and 50kHz are indicated below for reference.
The resistors' values do not change.
∑ When fc
30kHz:
C1 = 200pF, C2 = 910pF
∑ When fc
50kHz:
C1 = 120pF, C2 = 560pF
LPF Block Application Circuit

≠ 62 ≠
CXD2529Q
7. Setting Method of the CXD2529Q Playback Speed (in CLV-N mode)
(A) CD-DSP block
The playback modes shown below can be selected by the combination of the crystal, XTSL pin and $9X
command DSPB.
CD-DSP block playback speed
Crystal
768Fs
768Fs
384Fs
384Fs
384Fs
1
1
0
0
1
0
1
0
1
1
◊
1
◊
2
◊
1
◊
2
◊
1
1
XTSL
DSPB
CD-DSP block playback speed
Fs = 44.1kHz
1
Low power consumption mode. The CD-DSP processing speed is halved, allowing the power
consumption to be decreased.
(B) 1-bit DAC block
The operating speed of the DAC block is determined by the crystal and the $9X command MCSL
regardless of the operating conditions of the CD-DSP block mentioned above. This allows the playback
mode for the DAC block and CD-DSP block to be set independently.
1-bit DAC block playback speed
Crystal
768Fs
768Fs
384Fs
1
0
0
◊
1
◊
2
◊
1
MCSL
DAC block playback speed
Fs = 44.1kHz
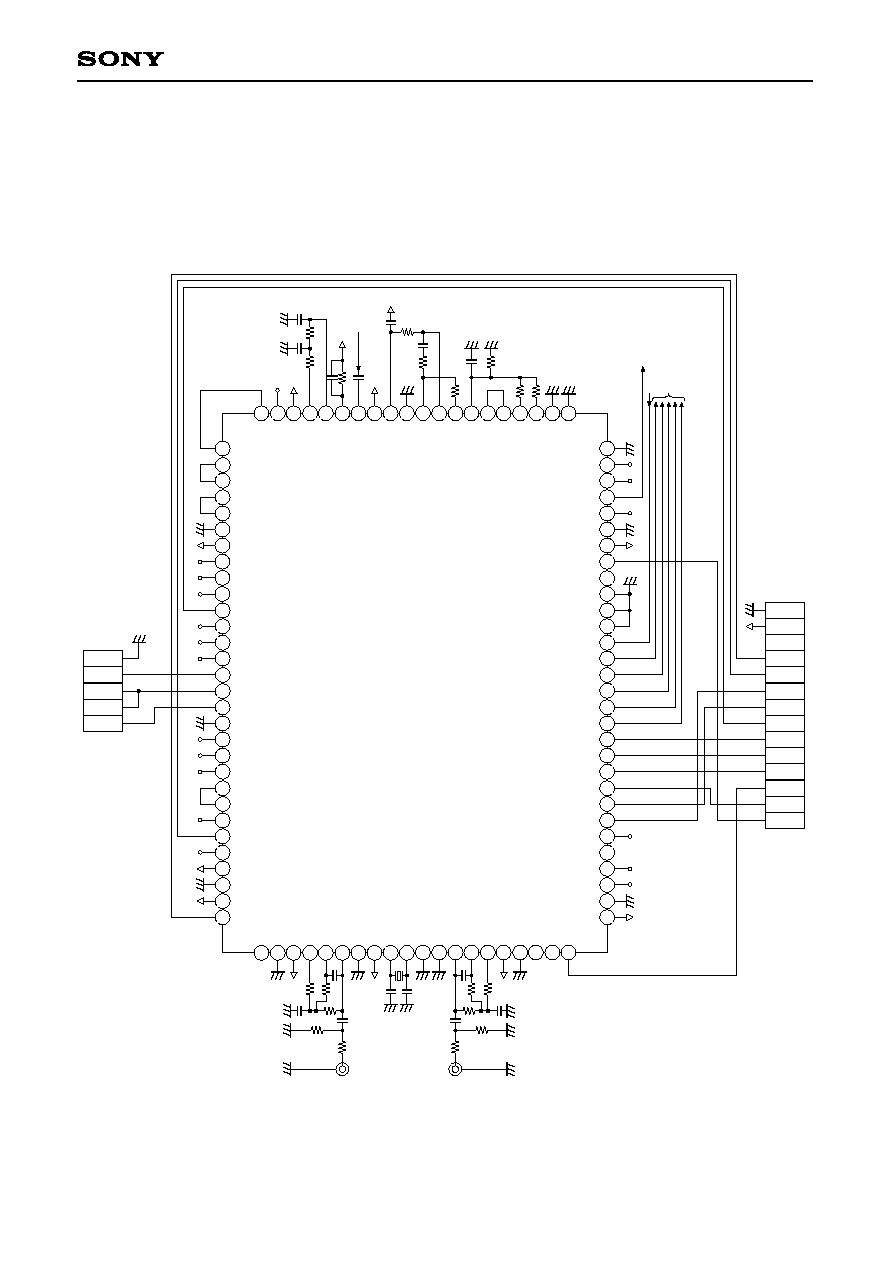
≠ 63 ≠
CXD2529Q
Application Circuit
LRCK
WDCK
ASYE
ASYO
ASYI
BIAS
RF
AV
DD
CLTV
AV
SS
FILI
FILO
PCO
VCTL
V16M
VCKI
VPCO1
VPCO2
TES1
TES0
RF
XLAT
CLK
GFS
SQSO
SQCK
SCOR
MUTE
V
DD
V
SS
FOK
SENS
XRST
DATA
DRIVER
SSP
LS
GND
MNT0
MNT1
MNT2
MNT3
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
1
V
DD
V
SS
LMUT
RMUT
TES2
CKOUT
SQCK
SQSO
SENS
DATA
XLAT
CLOK
SEIN
CNIN
DATO
XLTO
CLKO
SPOA
SPOB
SPOC
SPOD
XLON
FOK
V
DD
V
SS
MON
MDP
MDS
LOCK
PWMI
51
52
53
54
55
56
57
58
59
60
70
69
68
67
63
64
65
66
61
62
71
72
73
74
75
76
77
78
79
80
SYSM
V
DD
V
SS
EXCK
SBSO
SCOR
WFCK
EMPHI
EMPH
DOUT
C4M
FSTT
XTSL
MNT0
MNT1
MNT3
XROF
C2PO
RFCK
GFS
XPCK
XUGF
GTOP
V
DD
V
SS
BCKI
BCK
PCMDI
PCMD
LRCKI
40
39
38
37
36
35
34
31
32
33
41
42
43
44
45
46
47
48
49
50
81
82
83
84
88
87
86
85
89
90
10
0
99
98
97
96
95
94
91
92
93
XV
DD
NC
AV
SS
AV
DD
AOUT1
AIN1
LOUT1
AV
SS
XTAI
XTAO
XV
SS
AV
SS
LOUT2
AIN2
AOUT2
AV
DD
AV
SS
NC
NC
XRST
Application circuits shown are typical examples illustrating the operation of the
devices. Sony cannot assume responsibility for any problems arising out of the use of
these circuits or for any infringement of third party patent and other right due to same.

≠ 64 ≠
CXD2529Q
Package Outline
Unit: mm
SONY CODE
EIAJ CODE
JEDEC CODE
PACKAGE MATERIAL
LEAD TREATMENT
LEAD MATERIAL
PACKAGE WEIGHT
EPOXY RESIN
SOLDER PLATING
COPPER / 42 ALLOY
PACKAGE STRUCTURE
23.9 ± 0.4
QFP-100P-L01
DETAIL A
M
100PIN QFP (PLASTIC)
20.0 ≠ 0.1
+ 0.4
0∞ to 15∞
0.15 ≠ 0.05
+ 0.1
15.8 ±
0.4
17.9 ±
0.4
14.0 ≠ 0.01
+ 0.4
2.75 ≠ 0.15
+ 0.35
A
0.65
±0.12
0.15
0.8 ±
0.2
(16.3)
QFP100-P-1420-A
1.4g