 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: CXD2588R | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |
Description
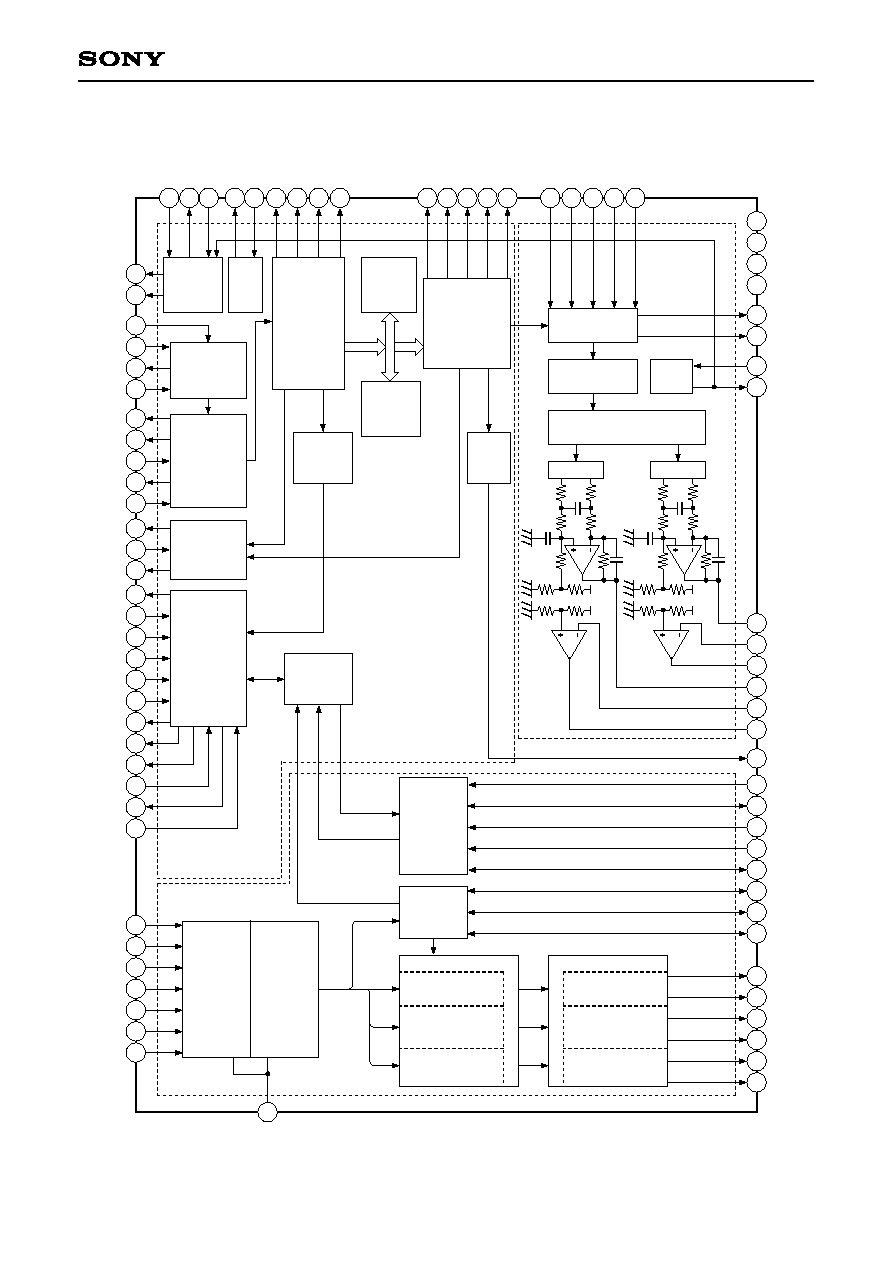
The CXD2588Q/R is a digital signal processor LSI
for CD players. This LSI incorporates a digital servo,
digital filter, zero detection circuit, 1-bit DAC and
analog low-pass filter on a single chip.
Features
Digital Signal Processor (DSP) Block
∑ Playback mode which supports CAV (Constant
Angular Velocity)
∑ Frame jitter free
∑ 0.5
◊
to 4
◊
continuous playback possible
∑ Allows relative rotational velocity readout
∑ Supports spindle external control
∑ Wide capture range playback mode
∑ Spindle rotational velocity following method
∑ Supports normal-speed, 4
◊
speed playback
∑ 16K RAM
∑ EFM data demodulation
∑ Enhanced EFM frame sync signal protection
∑ SEC strategy-based error correction
∑ Subcode demodulation and Sub Q data error
detection
∑ Digital spindle servo
∑ 16-bit traverse counter
∑ Asymmetry compensation circuit
∑ CPU interface on serial bus
∑ Error correction monitor signal, etc. output from a
new CPU interface
∑ Servo auto sequencer
∑ Digital audio interface outputs
∑ Digital level meter, peak meter
∑ CD TEXT data demodulation
Digital Servo (DSSP) Block
∑ Microcomputer software-based flexible servo control
∑ Offset cancel function for servo error signal
∑ Auto gain control function for servo loop
∑ E:F balance, focus bias adjustment functions
∑ Surf jump function supporting micro two-axis
Digital Filter, DAC and Analog Low-Pass Filter Blocks
∑ DBB (digital bass boost) function
∑ Double-speed playback supported
∑ Digital de-emphasis
∑ Digital attenuation
∑ Zero detection function
∑ 8Fs oversampling digital filter
∑ S/N: 100dB or more (master clock: 384Fs, typ.)
∑ Logical value: 109dB
∑ THD + N: 0.007% or less (master clock: 384Fs, typ.)
∑ Rejection band attenuation: ≠60dB or less
Applications
CD players
Structure
Silicon gate CMOS IC
Absolute Maximum Ratings
∑ Supply voltage
V
DD
≠0.3 to +7.0
V
∑ Input voltage
V
I
≠0.3 to +7.0
V
(V
SS
≠ 0.3V to V
DD
+ 0.3)
∑ Output voltage
V
O
≠0.3 to +7.0
V
∑ Storage temperature Tstg
≠40 to +125
∞C
∑ Supply voltage difference
V
SS
≠ AV
SS
≠0.3 to +0.3
V
V
DD
≠ AV
DD
≠0.3 to +0.3
V
Recommended Operating Conditions
∑ Supply voltage
V
DDNote)
+2.7 to +5.5
V
∑ Operating temperature Topr
≠20 to +75
∞C
Note) The V
DD
for the CXD2588Q/R varies according
to the playback speed selection.
≠ 1 ≠
CXD2588Q/R
E97519-PS
CD Digital Signal Processor with Built-in Digital Servo and DAC
Sony reserves the right to change products and specifications without prior notice. This information does not convey any license by
any implication or otherwise under any patents or other right. Application circuits shown, if any, are typical examples illustrating the
operation of the devices. Sony cannot assume responsibility for any problems arising out of the use of these circuits.
CXD2588Q
100 pin QFP (Plastic)
CXD2588R
100 pin LQFP (Plastic)
Playback
speed
CD-DSP block
DAC block
4
◊
4.75 to 5.25
1
◊
3.0 to 5.5
4.5 to 5.5
2.7 to 5.5
1
◊
2.7 to 5.5
V
DD
[V]
I/O Capacitance
∑ Input pin
C
I
11 (Max.)
pF
∑ Output pin
C
O
11 (Max.)
pF
∑ I/O pin
C
I/O
11 (Max.)
pF
Note) Measurement conditions V
DD
= V
I
= 0V
f
M
= 1MHz
For the availability of this product, please contact the sales office.
≠ 2 ≠
CXD2588Q/R
Block Diagram
PWM
PWM
AOUT1
AIN1
LOUT1
AOUT2
AIN2
LOUT2
3rd-Order
Noise Shaper
Over Sampling
Digital Filter
Serial-In
Interface
LMUT
RMUT
XTAO
XTAI
Timing
Logic
XRST
TEST
TES1
D/A
Interface
DOUT
EFM
demodurator
Error
Corrector
16K
RAM
Digital
OUT
Sub Code
Processor
Clock
Generator
Asymmetry
Corrector
Digital
PLL
CPU
Interface
Servo
Auto
Sequencer
DAC Block
P
C
M
D
I
B
C
K
P
C
M
D
L
R
C
K
C
2
P
O
W
F
C
K
E
M
P
H
G
F
S
X
U
G
F
X
T
S
L
RFAC
ASYI
ASYO
BIAS
FSTO
FILO
FILI
PCO
CLTV
MDP
PWMI
SENS
DATA
XLAT
CLOK
SPOA
SPOB
XLON
SCOR
SBSO
EXCK
SERVO
Interface
SCLK
COUT
SSTP
ATSK
MIRR
DFCT
FOK
MIRR
DFCT
FOK
SERVO DSP
FOCUS SERVO
TRACKING
SERVO
SLED SERVO
PWM GENERATOR
FOCUS PWM
GENERATOR
TRACKING PWM
GENERATOR
SLED PWM
GENERATOR
FFDR
FRDR
TFDR
TRDR
SFDR
SRDR
RFDC
CE
TE
SE
FE
VC
IGEN
OPAmp
Analog SW
A/D
Converter
A
D
I
O
B
C
K
I
S
Y
S
M
L
R
C
K
I
E
M
P
H
I
W
D
C
K
V
P
C
O
V
C
K
I
OSC
V
1
6
M
V
C
T
L
XPCK
C4M
SQSO
SQCK
LOCK
Digital
CLV
FSTI
TES2
Signal Processor
Block
Servo Block
≠ 3 ≠
CXD2588Q/R
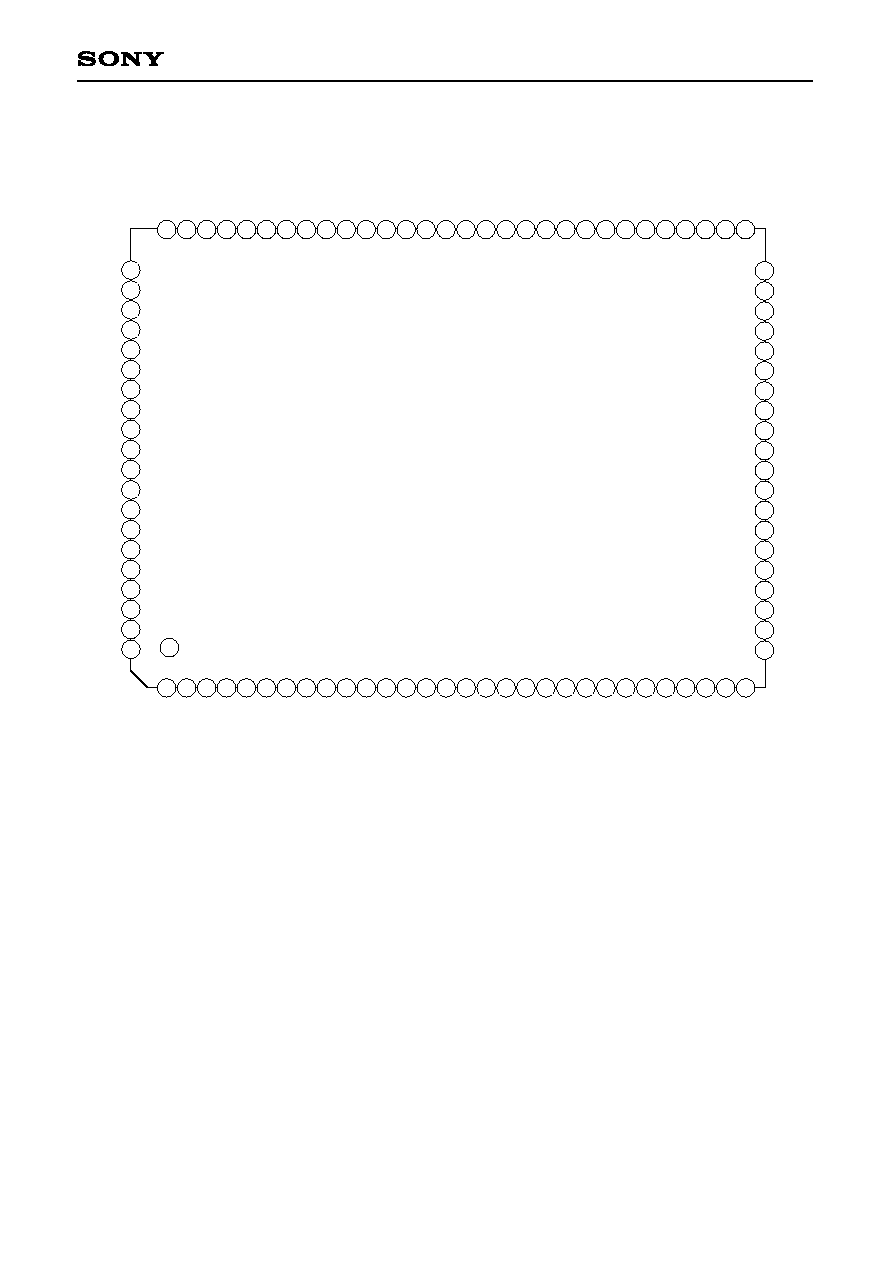
Pin Configuration (CXD2588Q)
L
M
U
T
N
C
S
Q
S
O
S
Q
C
K
S
B
S
O
E
X
C
K
X
R
S
T
S
Y
S
M
D
A
T
A
X
L
A
T
C
L
O
K
S
E
N
S
S
C
L
K
P
W
M
I
V
D
D
V
D
D
A
T
S
K
S
P
O
A
S
P
O
B
X
L
O
N
W
F
C
K
X
U
G
F
X
P
C
K
G
F
S
C
2
P
O
S
C
O
R
C
4
M
W
D
C
K
C
O
U
T
M
I
R
R
P
C
M
D
L
R
C
K
I
L
R
C
K
D
O
U
T
V
D
D
T
E
S
2
V
S
S
V
P
C
O
V
1
6
M
V
C
K
I
V
C
T
L
A
V
D
D
3
P
C
O
F
I
L
I
F
I
L
O
C
L
T
V
A
V
S
S
3
R
F
A
C
B
I
A
S
A
S
Y
I
A
S
Y
O
A
V
D
D
0
I
G
E
N
A
V
S
S
0
A
D
I
O
R
F
D
C
C
E
T
E
N
C
S
E
FE
VC
XTSL
TES1
TEST
V
SS
V
SS
FRDR
FFDR
TRDR
TFDR
SRDR
SFDR
FSTI
FSTO
SSTP
MDP
LOCK
FOK
DFCT
40
39
38
37
36
35
34
31
32
33
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
70 69 68 67
63
64
65
66
61
62
71
72
73
74
75
76
77
78
79
80
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
1
81
82
83
84
88
87
86
85
89
90
100
99
98
97
96
95
94
91
92
93
PCMDI
BCK
BCKI
EMPH
EMPHI
XV
DD
XTAI
XTAO
XV
SS
AV
DD
1
AOUT1
AIN1
LOUT1
AV
SS
1
AV
SS
2
LOUT2
AIN2
AOUT2
AV
DD
2
RMUT
≠ 4 ≠
CXD2588Q/R
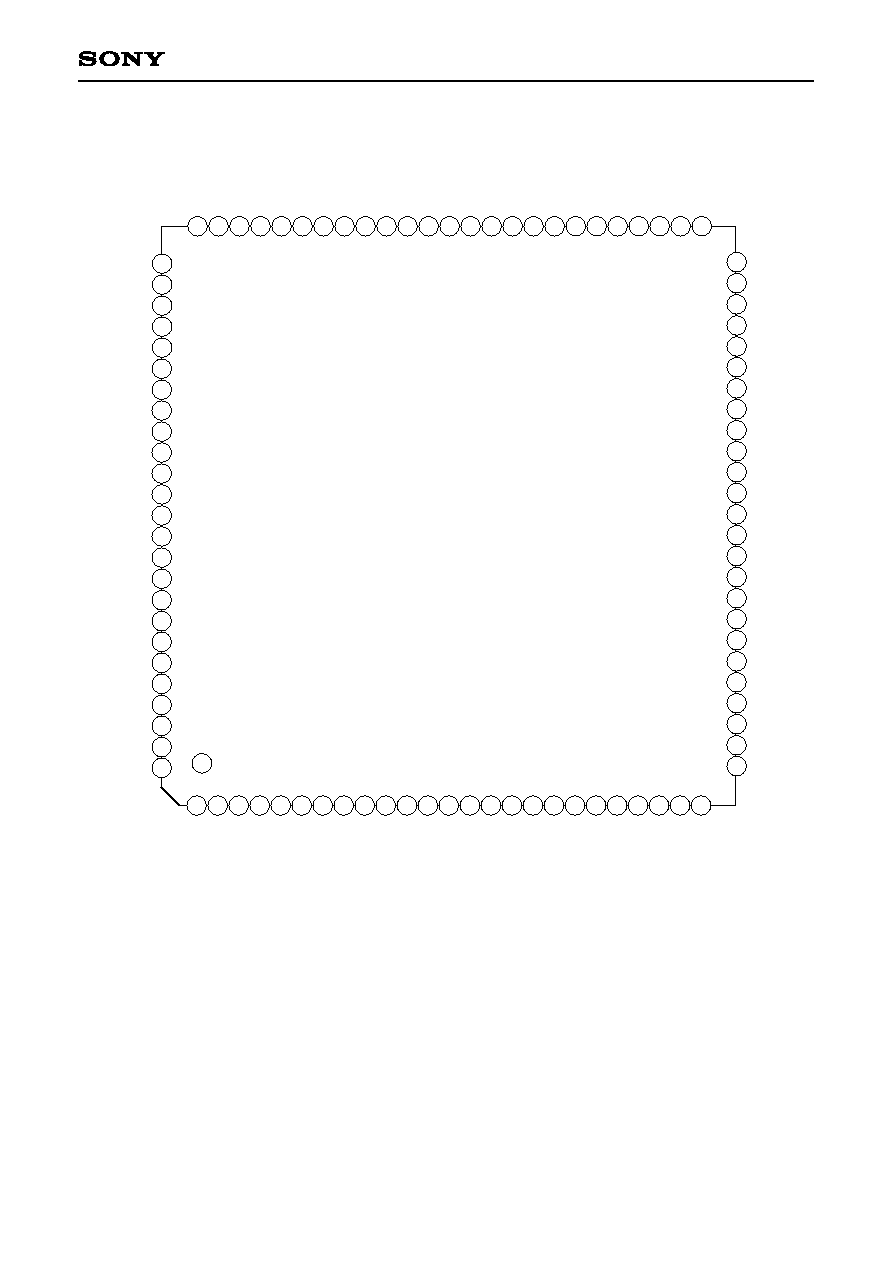
Pin Configuration (CXD2588R)
S
Q
S
O
S
Q
C
K
S
B
S
O
E
X
C
K
X
R
S
T
S
Y
S
M
D
A
T
A
X
L
A
T
C
L
O
K
S
E
N
S
S
C
L
K
P
W
M
I
V
D
D
V
D
D
A
T
S
K
S
P
O
A
S
P
O
B
X
L
O
N
W
F
C
K
X
U
G
F
X
P
C
K
G
F
S
C
2
P
O
S
C
O
R
C
4
M
D
O
U
T
V
D
D
T
E
S
2
V
S
S
V
P
C
O
V
1
6
M
V
C
K
I
V
C
T
L
A
V
D
D
3
P
C
O
F
I
L
I
F
I
L
O
C
L
T
V
A
V
S
S
3
R
F
A
C
B
I
A
S
A
S
Y
I
A
S
Y
O
A
V
D
D
0
I
G
E
N
A
V
S
S
0
A
D
I
O
R
F
D
C
C
E
T
E
LRCK
LRCKI
PCMD
PCMDI
BCK
BCKI
EMPH
EMPHI
XV
DD
XTAI
XTAO
XV
SS
AV
DD
1
AOUT1
AIN1
LOUT1
AV
SS
1
AV
SS
2
LOUT2
AIN2
AOUT2
AV
DD
2
RMUT
LMUT
NC
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
1
76
77
78
79
80
26
27
28
29
30
40
39
38
37
36
35
34
31
32
33
41
42
43
44
45
46
47
48
49
50
81
82
83
84
88
87
86
85
89
90
100
99
98
97
96
95
94
91
92
93
51
52
53
54
55
56
57
58
59
60
70 69 68 67
63
64
65
66
61
62
71
72
73
74
75
NC
SE
FE
VC
XTSL
TES1
TEST
V
SS
V
SS
FRDR
FFDR
TRDR
TFDR
SRDR
SFDR
FSTI
FSTO
SSTP
MDP
LOCK
FOK
DFCT
MIRR
COUT
WDCK
≠ 5 ≠
CXD2588Q/R
Pin Description
CXD
2588Q
Symbol
Output
values
Description
Sub Q 80-bit, PCM peak and level data outputs. CD TEXT data
output.
SQSO readout clock input.
Sub Q P to W serial output.
SBSO readout clock input.
System reset. Reset when low.
Mute input. Muted when high.
Serial data input from CPU.
Latch input from CPU. Serial data is latched at the falling edge.
Serial data transfer clock input from CPU.
SENS output to CPU.
SENS serial data readout clock input.
Spindle motor external control input.
Digital power supply.
Digital power supply.
Anti-shock input/output.
Microcomputer extension interface (input A)
Microcomputer extension interface (input B)
Microcomputer extension interface (output)
WFCK output.
XUGF output. MINT1 or RFCK is output by switching with the command.
XPCK output. MNT0 is output by switching with the command.
GFS output. MNT3 or XROF is output by switching with the command.
C2PO output. GTOP is output by switching with the command.
Outputs a high signal when either subcode sync S0 or S1 is detected.
4.2336MHz output. In CAV-W mode, 1/4 frequency division output for VCKI.
Word clock output. f = 2Fs.
Track count signal input/output.
Mirror signal input/output.
Defect signal input/output.
Focus OK signal input/output.
GFS is sampled at 460Hz; when GFS is high, this pin outputs a
high signal. If GFS is low eight consecutive samples, this pin
outputs low. Or input when LKIN = 1.
Spindle motor servo control output.
Disc innermost track detection signal input.
2/3 frequency division output for XTAI pin.
1, 0
1, 0
1, 0
--
--
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
1, Z, 0
1, 0
O
I
O
I
I
I
I
I
I
O
I
I
--
--
I/O
I
I
O
O
O
O
O
O
O
O
O
I/O
I/O
I/O
I/O
I/O
O
I
O
SQSO
SQCK
SBSO
EXCK
XRST
SYSM
DATA
XLAT
CLOK
SENS
SCLK
PWMI
V
DD
V
DD
ATSK
SPOA
SPOB
XLON
WFCK
XUGF
XPCK
GFS
C2PO
SCOR
C4M
WDCK
COUT
MIRR
DFCT
FOK
LOCK
MDP
SSTP
FSTO
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
I/O
CXD
2588R
Pin No.
≠ 6 ≠
CXD2588Q/R
CXD
2588Q
Symbol
Output
values
Description
2/3 frequency division input for XTAI pin.
Sled drive output.
Sled drive output.
Tracking drive output.
Tracking drive output.
Focus drive output.
Focus drive output.
Digital GND.
Digital GND.
Test pin. Normally, GND.
Test pin. Normally, GND.
Crystal selection input. Low when the crystal is 16.9344MHz; high
when the crystal is 33.8688MHz.
Center voltage input.
Focus error signal input.
Sled error signal input.
Tracking error signal input.
Center servo analog input.
RF signal input.
Test pin. No connected.
Analog GND.
Operational amplifier constant current input.
Analog power supply.
EFM full-swing output. (low = Vss, high = V
DD
)
Asymmetry comparator voltage input.
Asymmetry circuit constant current input.
EFM signal input.
Analog GND.
Multiplier VCO1 control voltage input.
Master PLL filter output. (slave = digital PLL)
Master PLL filter input.
Master PLL charge pump output.
Analog power supply.
Wide-band EFM PLL VCO2 control voltage input.
Wide-band EFM PLL VCO2 oscillation input.
1, 0
1, 0
1, 0
1, 0
1, 0
1, 0
--
--
Analog
--
--
1, 0
--
Analog
1, Z, 0
--
I
O
O
O
O
O
O
--
--
I
I
I
I
I
I
I
I
I
O
--
I
--
O
I
I
I
--
I
O
I
O
--
I
I
FSTI
SFDR
SRDR
TFDR
TRDR
FFDR
FRDR
V
SS
V
SS
TEST
TES1
XTSL
VC
FE
SE
NC
TE
CE
RFDC
ADIO
AV
SS
0
IGEN
AV
DD
0
ASYO
ASYI
BIAS
RFAC
AV
SS
3
CLTV
FILO
FILI
PCO
AV
DD
3
VCTL
VCKI
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
I/O
CXD
2588R
Pin No.
≠ 7 ≠
CXD2588Q/R
CXD
2588Q
Symbol
Output
values
Description
Wide-band EFM PLL VCO2 oscillation output.
Wide-band EFM PLL charge pump output.
Digital GND.
Test pin. Normally GND.
Digital power supply.
Digital Out output.
D/A interface. LR clock output f = Fs.
D/A interface. LR clock input.
D/A interface. Serial data output.
(two's complement, MSB first)
D/A interface. Serial data input.
(two's complement, MSB first)
D/A interface. Bit clock output.
D/A interface. Bit clock input.
Outputs a high signal when the playback disc has emphasis, and a
low signal when there is no emphasis.
Inputs a high signal when de-emphasis is on, and a low signal when
de-emphasis is off.
Master clock power supply.
Crystal oscillation circuit input. Master clock is externally input from
this pin.
Crystal oscillation circuit output.
Master clock GND.
Analog power supply.
L ch analog output.
L ch operational amplifier input.
L ch LINE output.
Analog GND.
Analog GND.
R ch LINE output.
R ch operational amplifier output.
R ch analog output.
Analog power supply.
R ch zero detection flag.
L ch zero detection flag.
1, 0
1, Z, 0
--
--
1, 0
1, 0
1, 0
1, 0
1, 0
--
--
--
--
--
--
1, 0
1, 0
O
O
--
I
--
O
O
I
O
I
O
I
O
I
--
I
O
--
--
O
I
O
--
--
O
I
O
--
O
O
V16M
VPCO
V
SS
TES2
V
DD
DOUT
LRCK
KRCKI
PCMD
PCMDI
BCK
BCKI
EMPH
EMPHI
XV
DD
XTAI
XTAO
XV
SS
AV
DD
1
AOUT1
AIN1
LOUT1
AV
SS
1
AV
SS
2
LOUT2
AIN2
AOUT2
AV
DD
2
RMUT
LMUT
NC
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
1
2
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
I/O
CXD
2588R
Pin No.
≠ 8 ≠
CXD2588Q/R
Notes) ∑ PCMD is a MSB first, two's complement output.
∑ GTOP is used to monitor the frame sync protection status. (High: sync protection window released.)
∑ XUGF is the frame sync obtained from the EFM signal, and is negative pulse. It is the signal before
sync protection.
∑ XPCK is the inverse of the EFM PLL clock. The PLL is designed so that the falling edge and the
EFM signal transition point coincide.
∑ The GFS signal goes high when the frame sync and the insertion timing match.
∑ RFCK is derived from the crystal accuracy, and has a cycle of 136µs.
∑ C2PO represents the data error status.
∑ XROF is generated when the 16K RAM exceeds the ±4F jitter margin.
Monitor Pin Output Combinations
0
0
1
MTSL1
0
1
0
MTSL0
XUGF
MNT1
RFCK
XPCK
MNT0
XPCK
GFS
MNT3
XROF
C2PO
C2PO
GTOP
Command bit
Output data
≠ 9 ≠
CXD2588Q/R
Electrical Characteristics
1. DC Characteristics
(V
DD
= AV
DD
= 5.0V ± 5%, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
Applicable pins
1
SYSM, DATA, XLAT, PWMI, SSTP, FSTI, XTSL, TEST, TES1, VCKI, TES2
2
SQCK, XRST, CLOK
3
LRCKI, PCMDI, BCKI, EMPHI
4
ASYI, RFAC, CLTV, FILI, VCTL
5
SQSO, SBSO, SENS, ATSK, XLON, WFCK, XUGF, XPCK, GFS, C2PO, SCOR, C4M, WDCK, COUT,
MIRR, DFCT, FOK, LOCK, FSTO, SFDR, SRDR, TFDR, TRDR, FFDR, FRDR, ASYO, DOUT, LRCK,
PCMD, BCK, EMPH, RMUT, LMUT
6
V16M
7
MDP, PCO, VPCO
8
FILO
9
VC, FE, SE, TE, CE
10
RFDC
11
EXCK, ATSK, COUT, MIRR, DFCT, FOK, LOCK
12
SCLK, SPOA, SPOB
Item
Input
voltage (1)
Input
voltage (2)
Input
voltage (3)
Input
voltage (4)
Output
Avoltage (1)
Output
Avoltage (2)
Output
Avoltage (3)
Output
Avoltage (4)
Input leak current (1)
Input leak current (2)
Input leak current (3)
Input leak current (4)
1,
11
2,
12
3
4,
9,
10
5
6
7
1,
2
11,
12
9
10
8
Schmitt input
Analog input
I
OH
= ≠2mA
I
OL
= 4mA
I
OH
= ≠4mA
I
OL
= 8mA
I
OH
= ≠6mA
I
OL
= 4mA
I
OH
= ≠0.28mA
I
OL
= 0.36mA
V
IN
= V
SS
or V
DD
V
IN
= V
SS
or V
DD
V
I
= 1.5 to 3.5V
V
I
= 0 to 5.0V
High level input voltage
Low level input voltage
High level input voltage
Low level input voltage
High level input voltage
Low level input voltage
Input voltage
High level output voltage
Low level output voltage
High level output voltage
Low level output voltage
High level output voltage
Low level output voltage
High level output voltage
Low level output voltage
V
IH
(1)
V
IL
(1)
V
IH
(2)
V
IL
(2)
V
IH
(3)
V
IL
(3)
V
IN
(4)
V
OH
(1)
V
OL
(1)
V
OH
(2)
V
OL
(2)
V
OH
(3)
V
OL
(3)
V
OH
(4)
V
OL
(4)
I
LI
(1)
I
LI
(2)
I
LI
(3)
I
LI
(4)
0.7V
DD
0.8V
DD
0.8V
DD
Vss
V
DD
≠ 0.8
Vss
V
DD
≠ 0.8
Vss
V
DD
≠ 0.8
Vss
V
DD
≠ 0.5
Vss
≠10
≠40
≠20
≠40
0.3V
DD
0.2V
DD
0.2V
DD
V
DD
V
DD
0.4
V
DD
0.4
V
DD
0.4
V
DD
0.4
10
40
20
600
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
µA
µA
µA
µA
Conditions
Min.
Typ.
Max.
Unit
Applicable
pins
≠ 10 ≠
CXD2588Q/R
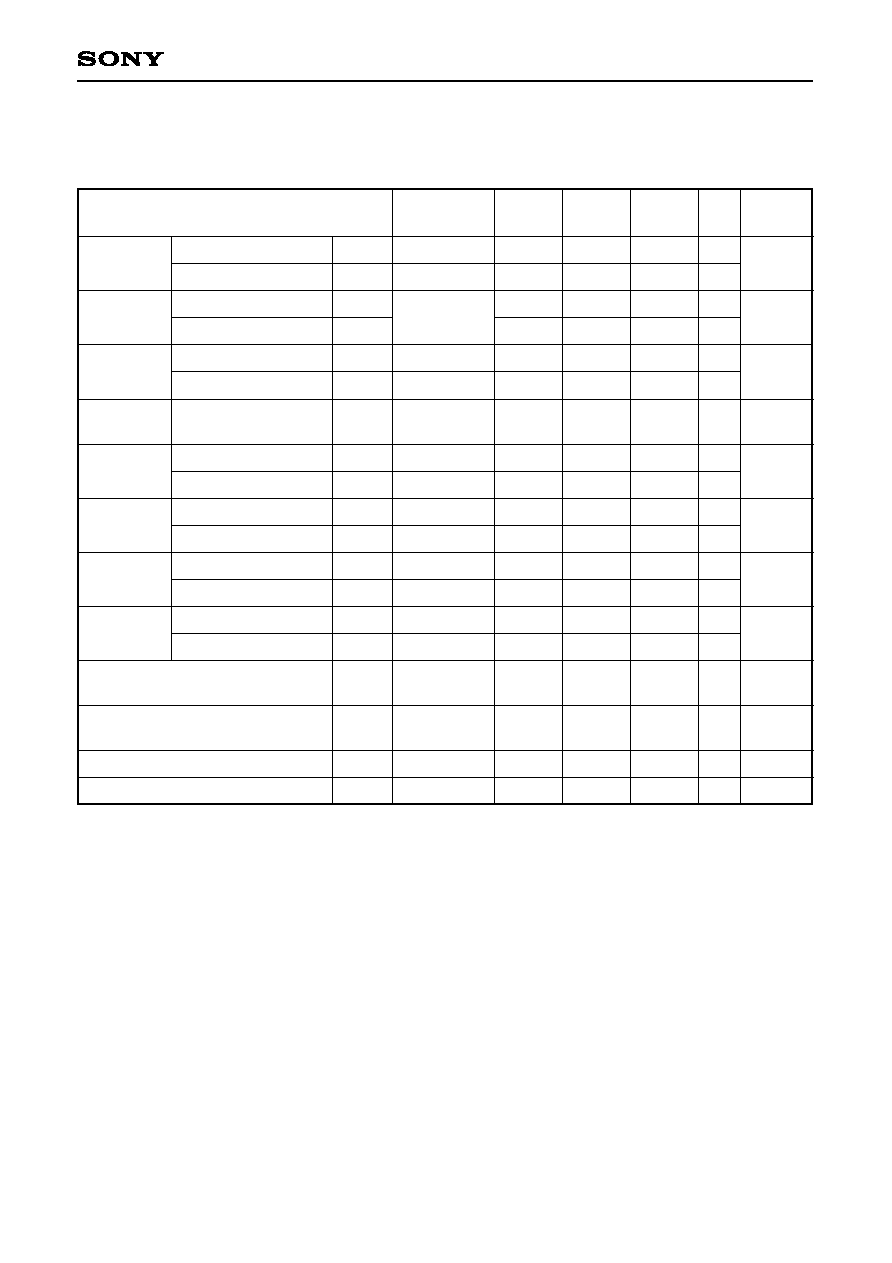
2. AC Characteristics
(1) XTAI pin
(a) When using self-excited oscillation
(Topr = ≠20 to +75∞C, V
DD
= AV
DD
= 5.0V ± 5%)
(b) When inputting pulses to XTAI pin
(Topr = ≠20 to +75∞C, V
DD
= AV
DD
= 5.0V ± 5%)
(c) When inputting sine waves to XTAI pin via a capacitor
(Topr = ≠20 to +75∞C, V
DD
= AV
DD
= 5.0V ± 5%)
Oscillation
frequency
f
MAX
7
34
MHz
Item
Symbol
Min.
Typ.
Max.
Unit
High level pulse
width
t
WHX
13
500
ns
Low level pulse
width
t
WLX
13
500
ns
Pulse cycle
t
CK
26
1,000
ns
Input high level
V
IHX
V
DD
≠ 1.0
V
Input low level
V
ILX
0.8
V
Rise time, fall
time
t
R
,
t
F
10
ns
Item
Symbol
Min.
Typ.
Max.
Unit
Input amplitude
V
I
2.0
V
DD
+ 0.3 Vp-p
Item
Symbol
Min.
Typ.
Max.
Unit
t
R
t
F
t
WHX
t
WLX
t
CX
V
ILX
V
IHX
◊
0.1
V
IHX
◊
0.9
V
IHX
XTAI
V
DD
/2
≠ 11 ≠
CXD2588Q/R
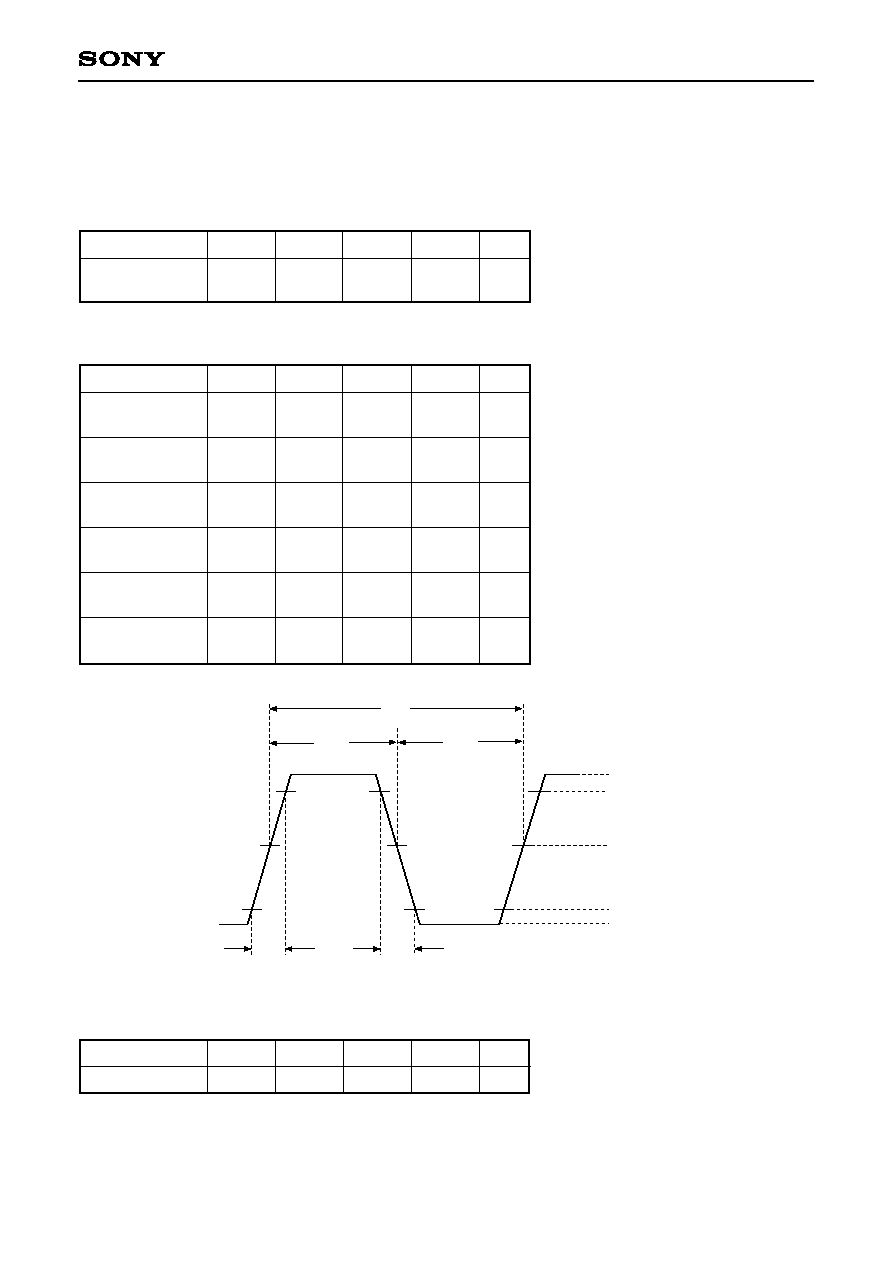
(2) CLOK, DATA, XLAT, COUT, SQCK, and EXCK pins
(V
DD
= AV
DD
= 5.0V ± 5%, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
Note) In quasi double-speed playback mode, except when SQSO is Sub Q Read, the SQCK maximum
operating frequency is 300kHz and its minimum pulse width is 1.5µs.
(3) BCKI, LRCKI and PCMDI pins (V
DD
= AV
DD
= 5.0V ± 5%, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
Clock frequency
Clock pulse width
Setup time
Hold time
Delay time
Latch pulse width
EXCK, SQCK frequency
EXCK, SQCK pulse width
f
CK
t
WCK
t
SU
t
H
t
D
t
WL
f
T
f
WT
750
300
300
300
750
750
Note)
0.65
0.65
Note)
MHz
ns
ns
ns
ns
ns
MHz
ns
Item
Symbol
Min.
Typ.
Max.
Unit
t
WCK
t
WCK
1/f
CK
t
H
t
SU
t
WL
t
D
1/f
T
t
WT
t
WT
t
H
t
SU
CLOK
DATA
XLAT
EXCK
SQCK
SBSO
SQSO
BCK pulse width
DATAL, R setup time
DATAL, R hold time
LRCK setup time
t
W
t
SU
t
H
t
SU
ns
ns
ns
ns
Item
Symbol Conditions
Typ.
94
18
18
18
Min.
Max.
Unit
V
DD
/2
V
DD
/2
t
W
(BCKI) t
W
(BCKI)
t
SU
(PCMDI)
t
H
(PCMDI)
t
SU
(LRCKI)
BCKI
PCMDI
LRCKI
≠ 12 ≠
CXD2588Q/R
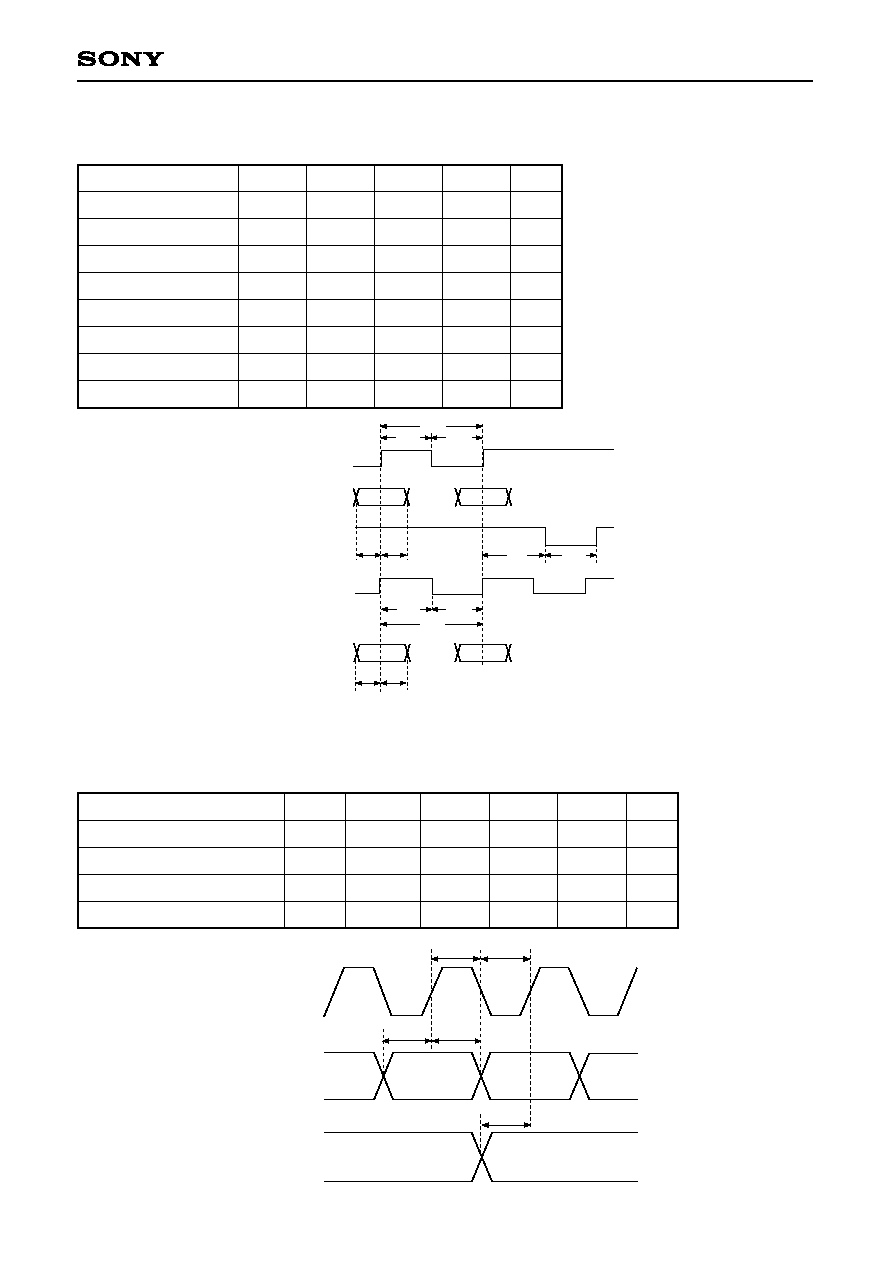
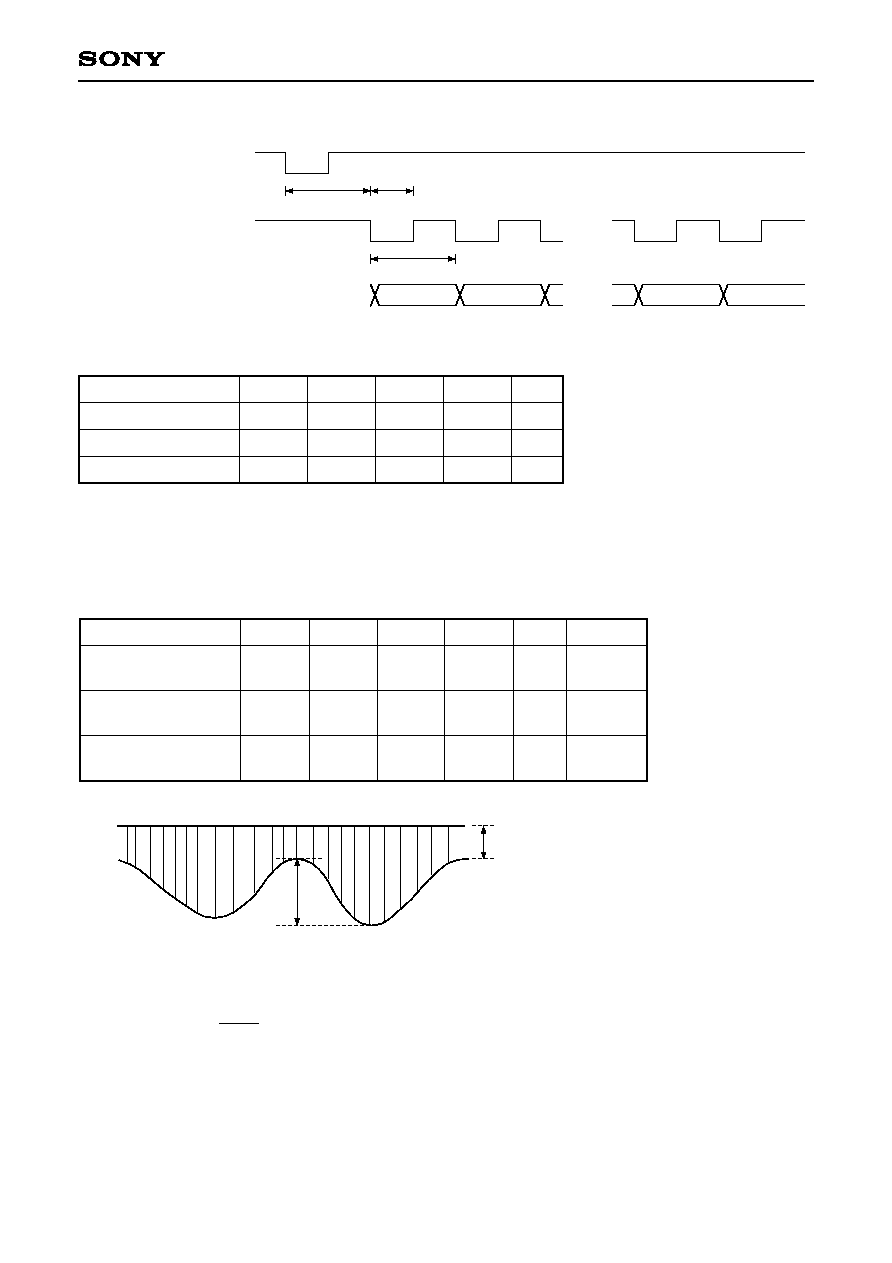
(5) COUT, MIRR and DFCT pins
Operating frequency (V
DD
= AV
DD
= 5.0V ± 5%, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
COUT maximum
operating frequency
MIRR maximum
operating frequency
DFCT maximum
operating frequency
f
COUT
f
MIRR
f
DFCTH
40
40
5
kHz
kHz
kHz
1
2
3
Item
Symbol
Min.
Typ.
Max.
Unit
Conditions
1
When using a high-speed traverse TZC
2
When the RF signal continuously satisfies the following conditions during the above traverse.
∑ A = 0.12V
DD
to 0.26V
DD
∑
= 25%
3
During complete RF signal omission
When settings related to DFCT signal generation are Typ.
(4) SCLK pin
SCLK frequency
SCLK pulse width
Delay time
f
SCLK
t
SPW
t
DLS
31.3
15
16
MHz
ns
µs
Item
Symbol
Min.
Typ.
Max.
Unit
t
SPW
t
DLS
1/f
SCLK
MSB
LSB
∑∑∑
∑∑∑
XLAT
SCLK
Serial Read Out Data
(SENS)
A
B
B
A + B
≠ 13 ≠
CXD2588Q/R
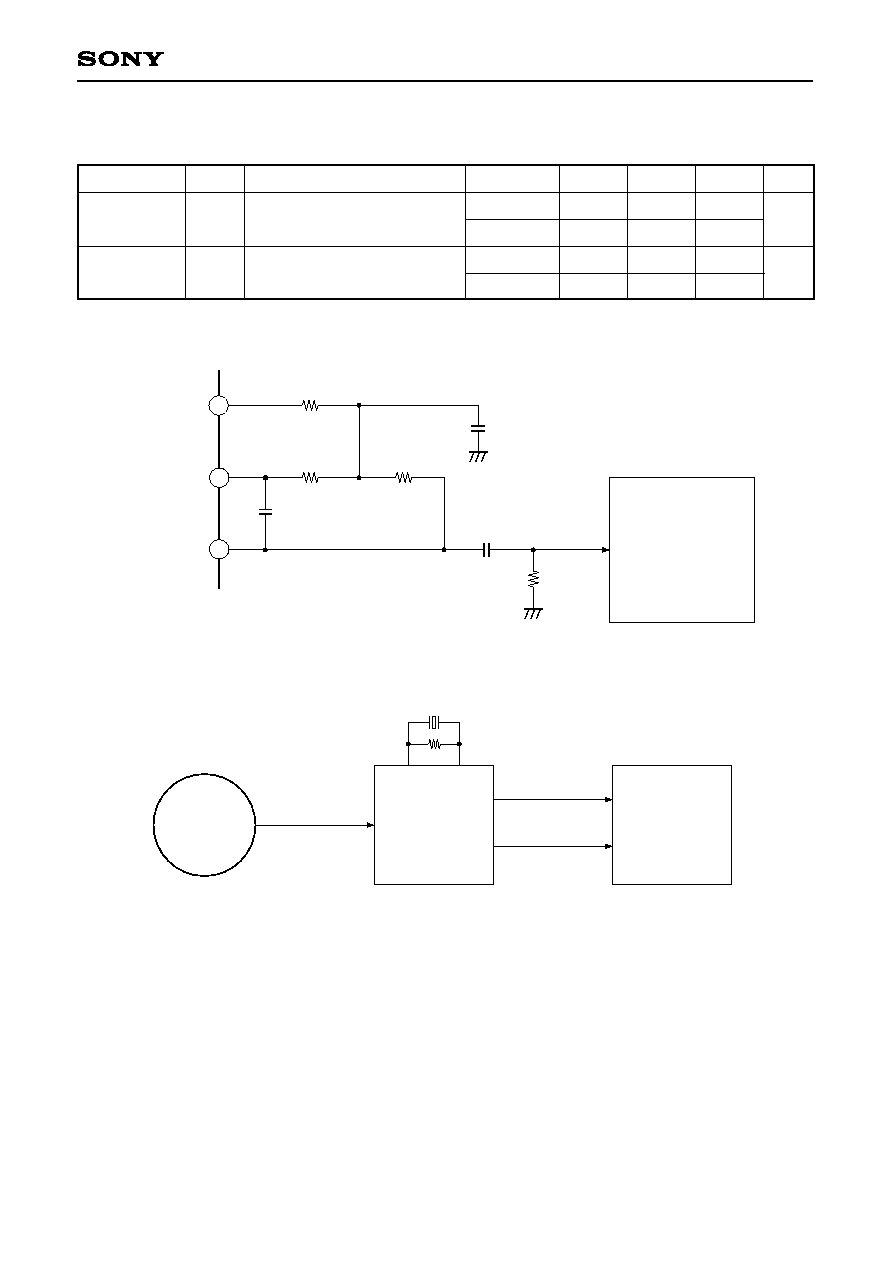
1-bit DAC and LPF Block Analog Characteristics
Analog characteristics (V
DD
= AV
DD
= 5.0V, V
SS
= AV
SS
= 0V, Ta = 25∞C)
Fs = 44.1kHz in all cases.
The total harmonic distortion and signal-to-noise ratio measurement circuits are shown below.
LPF external circuit diagram
Block diagram of analog characteristics measurement
Item
Total harmonic
distortion
Signal-to-noise
ratio
Symbol
THD
S/N
Conditions
1kHz, 0dB data
Crystal
1kHz, 0dB data
(Using A-weighting filter)
384Fs
768Fs
384Fs
768Fs
96
96
0.0050
0.0045
100
100
0.0070
0.0065
Min.
Typ.
Max.
Unit
%
dB
Audio Analyzer
SHIBASOKU (AM51A)
100k
22µ
680p
12k
12k
12k
150p
AOUT1 (2)
AIN1 (2)
LOUT1 (2)
Audio Analyzer
CXD2588Q/R
Rch
A
Lch
B
DATA
RF
TEST DISC
768Fs/384Fs
≠ 14 ≠
CXD2588Q/R
(V
DD
= AV
DD
= 5.0V, V
SS
= AV
SS
= 0V, Topr = ≠20 to +75∞C)
Output voltage
Load resistance
V
OUT
R
L
1
1
Vrms
k
Item
Symbol
8
Min.
Max.
1.12
Typ.
Applicable pins
Unit
Measurement is conducted for the LPF external circuit diagram with the sine wave output of 1kHz and 0dB.
Applicable pins
1
LOUT1, LOUT2

≠ 15 ≠
CXD2588Q/R
Contents
ß1. CPU Interface
ß1-1.
CPU Interface Timing ........................................................................................................................ 16
ß1-2.
CPU Interface Command Table ........................................................................................................ 16
ß1-3.
CPU Command Presets .................................................................................................................... 26
ß1-4.
Description of SENS Signals and Commands ................................................................................... 31
ß2. Subcode Interface
ß2-1.
P to W Subcode Readout .................................................................................................................. 51
ß2-2.
80-bit Sub Q Readout ........................................................................................................................ 51
ß3. Description of Modes
ß3-1.
CLV-N Mode ...................................................................................................................................... 56
ß3-2.
CLV-W Mode ..................................................................................................................................... 56
ß3-3.
CAV-W Mode ..................................................................................................................................... 56
ß4. Description of Other Functions
ß4-1.
Channel Clock Regeneration by the Digital PLL Circuit .................................................................... 58
ß4-2.
Frame Sync Protection ...................................................................................................................... 60
ß4-3.
Error Correction ................................................................................................................................. 60
ß4-4.
DA Interface ....................................................................................................................................... 61
ß4-5.
Digital Out .......................................................................................................................................... 63
ß4-6.
Servo Auto Sequence ....................................................................................................................... 63
ß4-7.
Digital CLV ......................................................................................................................................... 70
ß4-8.
CD-DSP Block Playback Speed ........................................................................................................ 71
ß4-9.
DAC Block Playback Speed .............................................................................................................. 71
ß4-10. DAC Block Input Timing .................................................................................................................... 72
ß4-11. Description of DAC Block Functions .................................................................................................. 72
ß4-12. LPF Block .......................................................................................................................................... 76
ß4-13. Asymmetry Compensation ................................................................................................................ 77
ß4-14. CD Text Data Demodulation .............................................................................................................. 78
ß5. Description of Servo Signal Processing System Functions and Commands
ß5-1.
General Description of Servo Signal Processing System .................................................................. 80
ß5-2.
Digital Servo Block Master Clock (MCK) ........................................................................................... 81
ß5-3.
AVRG Measurement and Compensation .......................................................................................... 81
ß5-4.
E:F Balance Adjustment Function ..................................................................................................... 83
ß5-5.
FCS Bias Adjustment Function .......................................................................................................... 83
ß5-6.
AGCNTL Function ............................................................................................................................. 85
ß5-7.
FCS Servo and FCS Search ............................................................................................................. 87
ß5-8.
TRK and SLD Servo Control ............................................................................................................. 88
ß5-9.
MIRR and DFCT Signal Generation .................................................................................................. 89
ß5-10. DFCT Countermeasure Circuit .......................................................................................................... 90
ß5-11. Anti-Shock Circuit .............................................................................................................................. 90
ß5-12. Brake Circuit ...................................................................................................................................... 91
ß5-13. COUT Signal ..................................................................................................................................... 92
ß5-14. Serial Readout Circuit ........................................................................................................................ 92
ß5-15. Writing to the Coefficient RAM .......................................................................................................... 93
ß5-16. PWM Output ...................................................................................................................................... 93
ß5-17. Servo Status Changes Produced by the LOCK Signal ..................................................................... 95
ß5-18. Description of Commands and Data Sets ......................................................................................... 95
ß5-19. List of Servo Filter Coefficients ........................................................................................................ 110
ß5-20. Filter Composition ............................................................................................................................ 112
ß5-21. TRACKING and FOCUS Frequency Response .............................................................................. 119
ß6. Application Circuit .................................................................................................................................. 120
Explanation of abbreviations
AVRG:
Average
AGCNTL: Auto gain control
FCS:
Focus
TRK:
Tracking
SLD:
Sled
DFCT:
Defect
≠ 16 ≠
CXD2588Q/R
ß1. CPU Interface
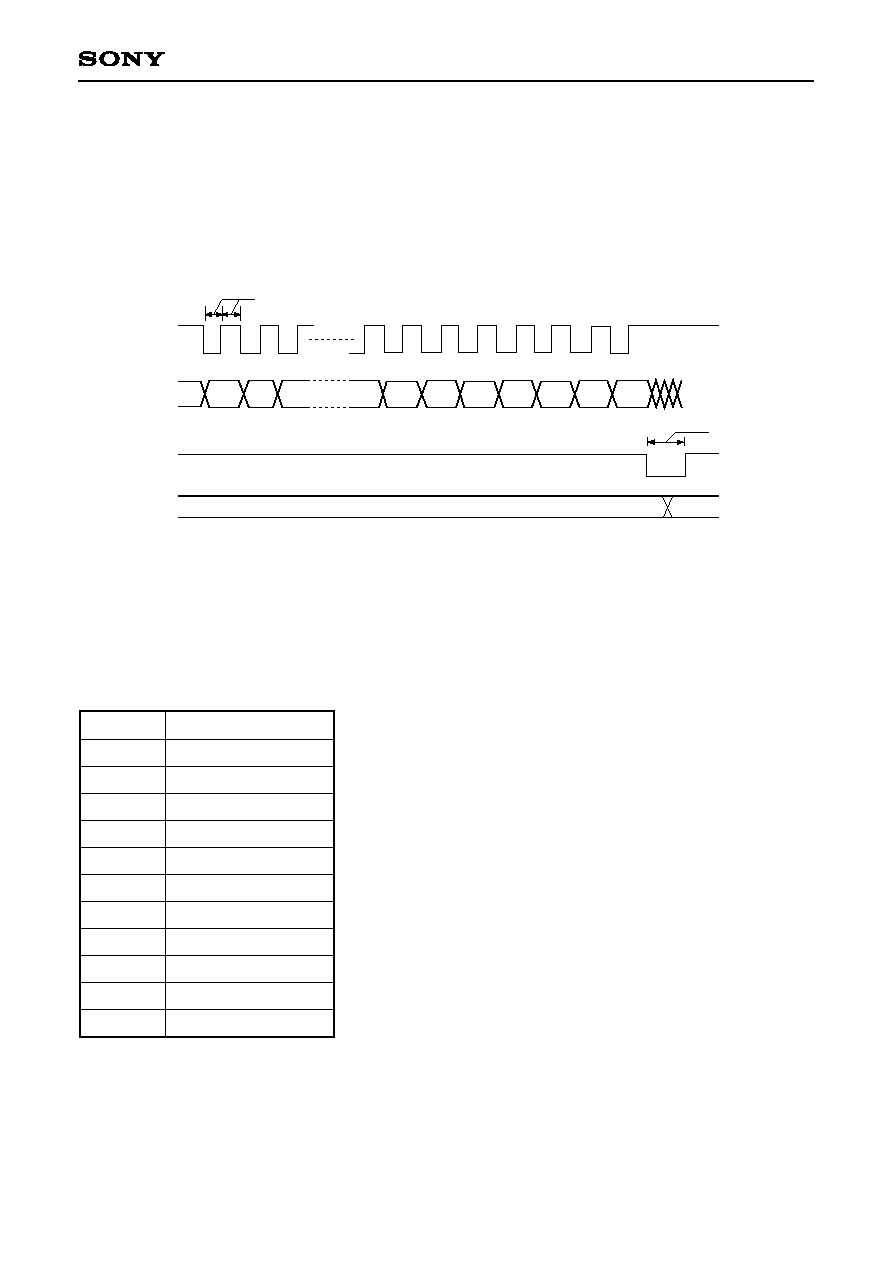
ß1-1. CPU Interface Timing
∑ CPU interface
This interface uses DATA, CLOK and XLAT to set the modes.
The interface timing chart is shown below.
∑ The internal registers are initialized by a reset when XRST = 0.
Note) Be sure to set SQCK to high when XLAT is low.
ß1-2. CPU Interface Command Table
Total bit length for each register
Register
0 to 2
3
4 to 6
7
8
9
A
B
C
D
E
8 bits
8 to 24 bits
8 bits
20 bits
28 bits
24 bits
28 bits
16 bits
8 bits
16 bits
20 bits
Total bit length
750ns or more
D18
D19
D20
D21
D22
D23
750ns or more
Valid
CLOK
DATA
XLAT
Registers
D0
D1
≠ 17 ≠
CXD2588Q/R
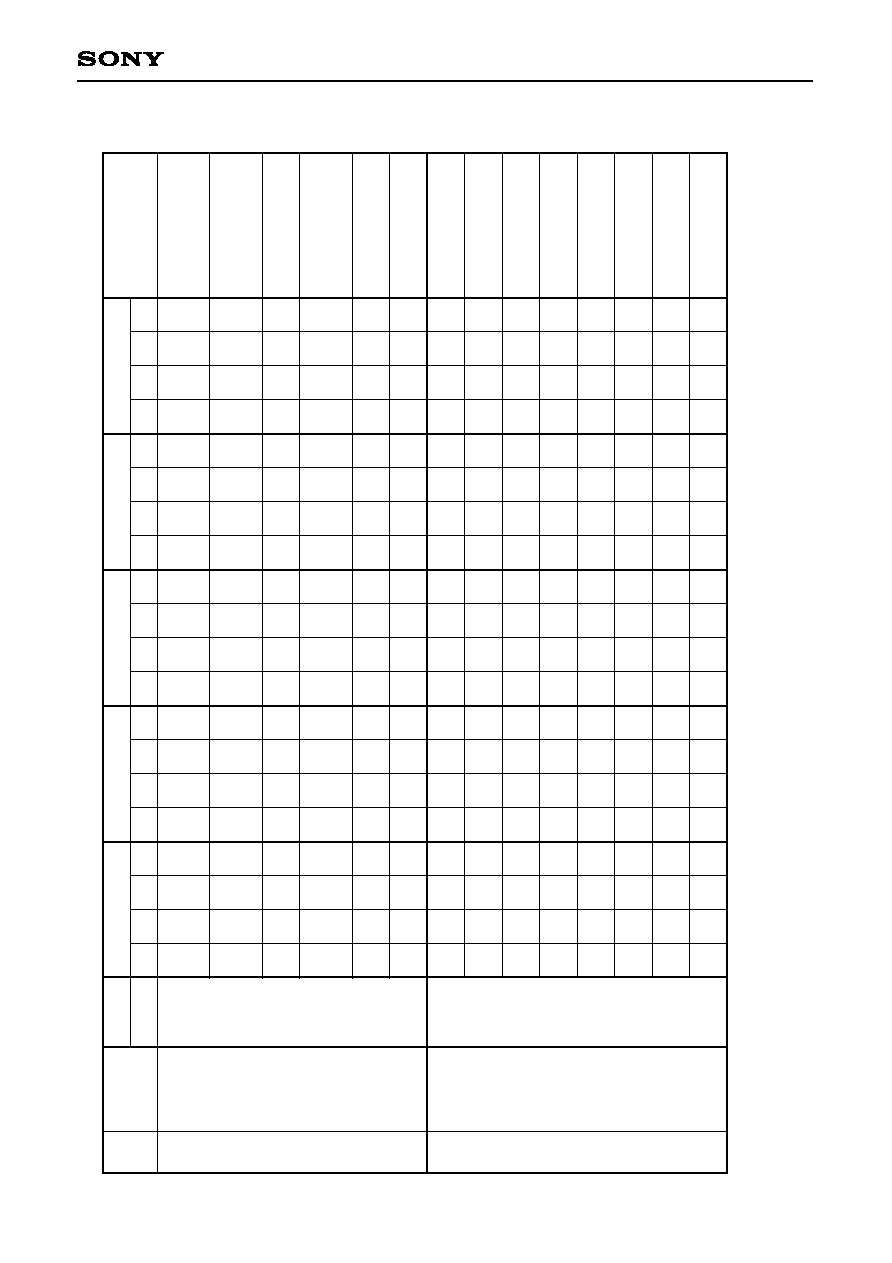
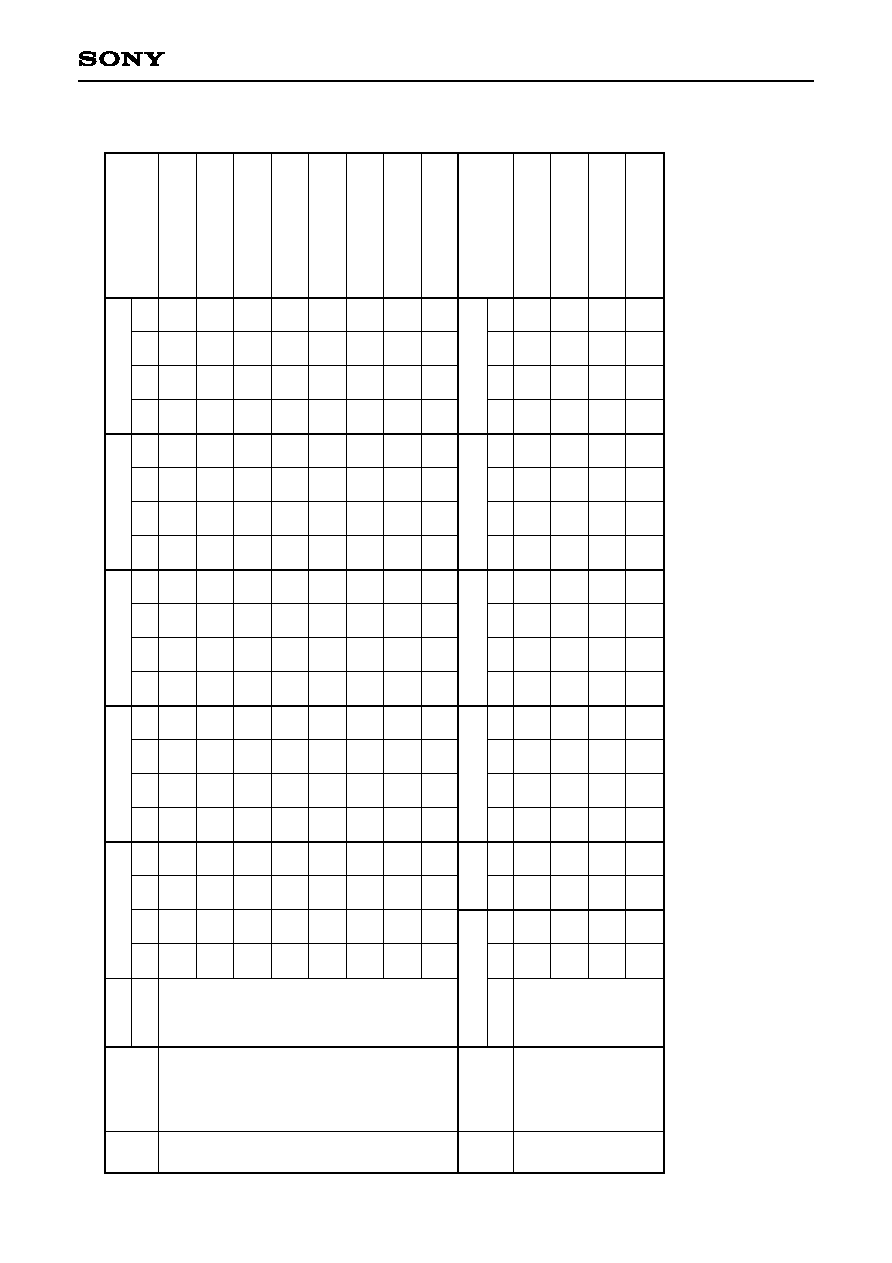
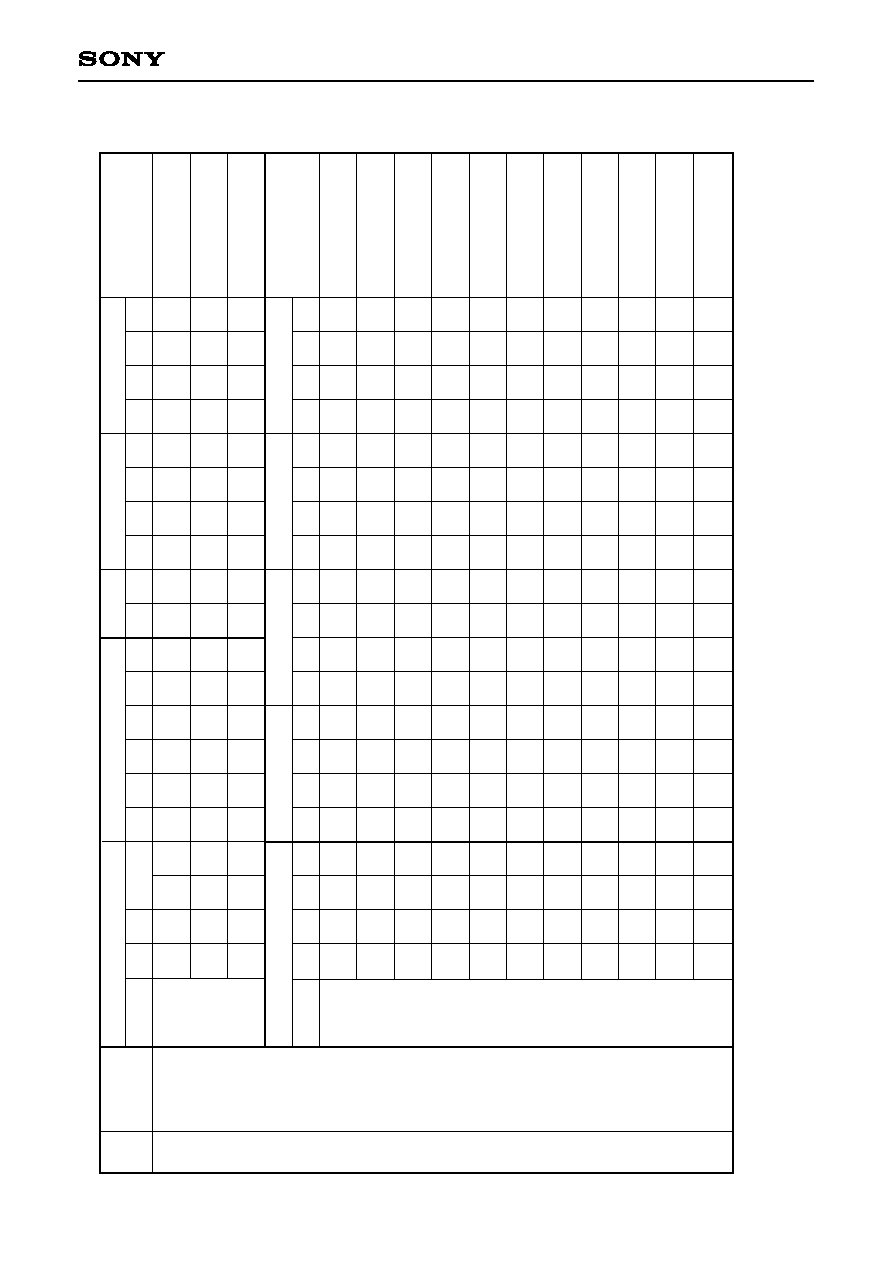
Command Table ($0X to 1X)
FOCUS SERVO ON
(FOCUS GAIN
NORMAL)
FOCUS SERVO ON
(FOCUS GAIN
DOWN)
FOCUS SERVO OFF,
0V OUT
FOCUS SERVO OFF,
FOCUS SEARCH
VOLTAGE OUT
FOCUS SEARCH
VOLTAGE DOWN
FOCUS SEACH
VOLTAGE UP
ANTI SHOCK ON
ANTI SHOCK OFF
BRAKE ON
BRAKE OFF
TRACKING GAIN
NORMAL
TRACKING GAIN UP
TRACKING GAIN UP
FILTER SELECT 1
TRACKING GAIN UP
FILTER SELECT 2
1
1
0
0
0
0
1
0
--
--
--
--
--
--
0
1
--
--
--
--
0
--
1
0
--
--
--
--
--
--
0
1
1
1
--
--
--
--
0
1
--
--
--
--
--
--
0
1
--
--
--
--
--
--
1
0
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
0
1
0 0 0 0
0 0 0 1
FOCUS
CONTROL
TRACKING
CONTROL
Register
Command
Address
D23 to D20
Data 1
D19
D18
D17
D16
Data 2
D15
D14
D13
D12
Data 3
D11
D10
D9
D8
Data 4
D7
D6
D5
D4
Data 5
D3
D2
D1
D0
--: Don't care
≠ 18 ≠
CXD2588Q/R
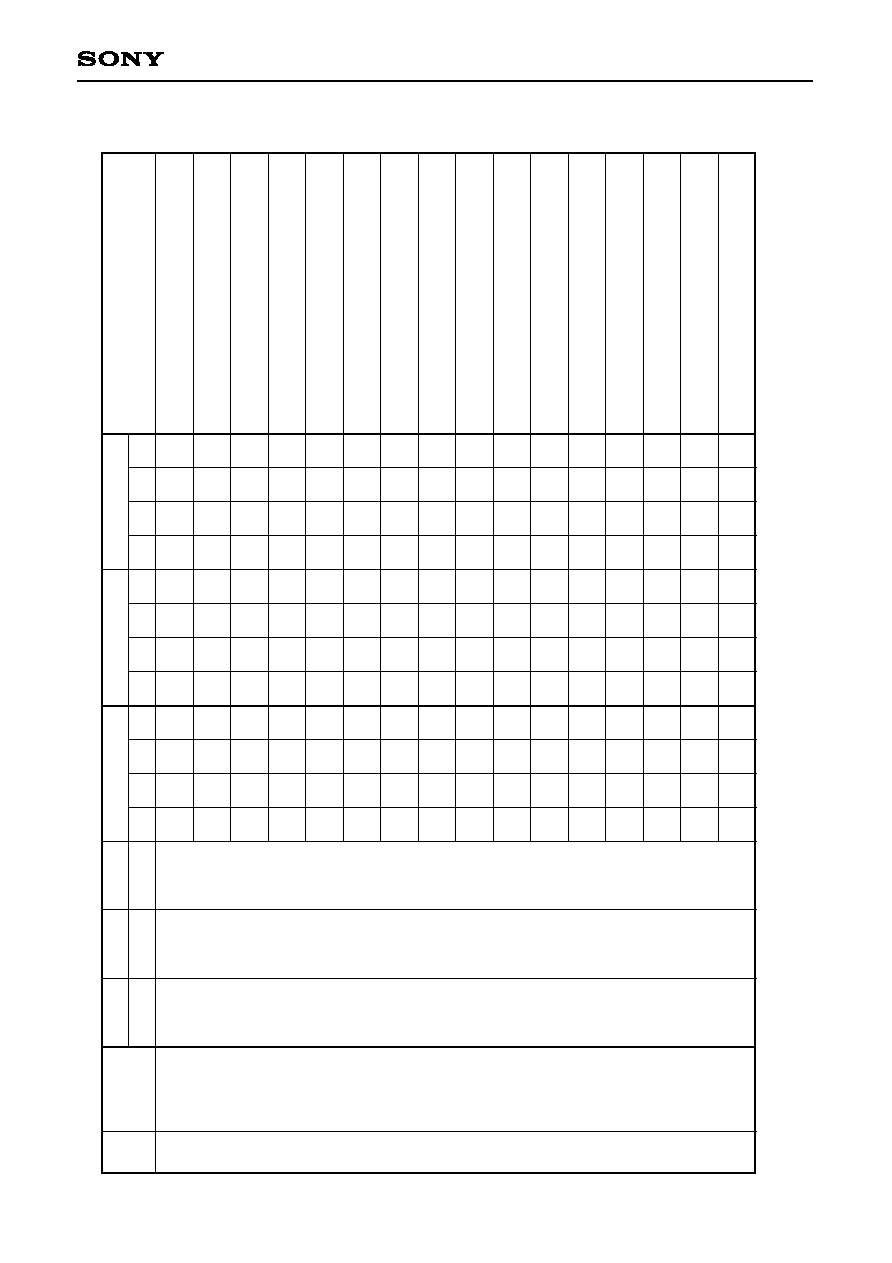
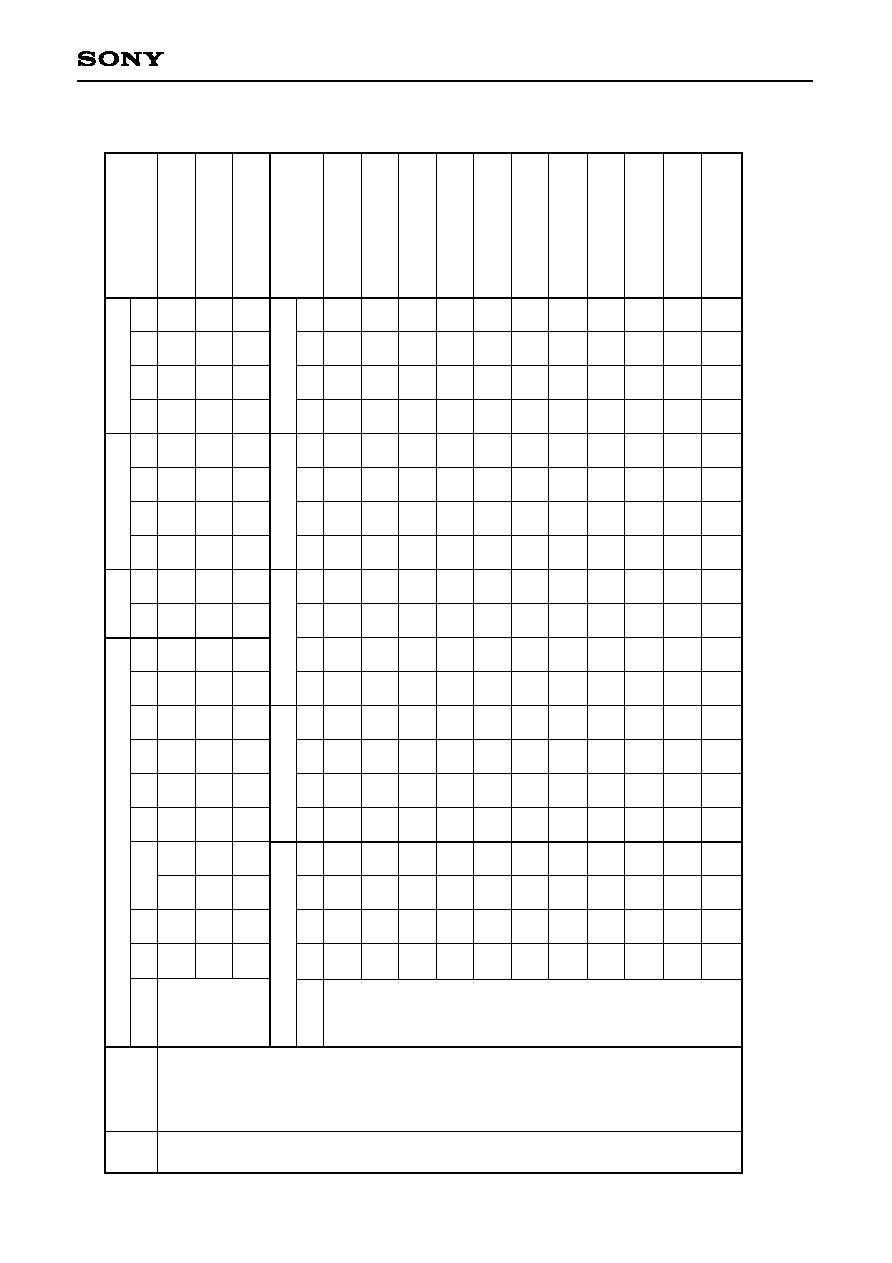
Command Table ($2X to 3X)
TRACKING SERVO OFF
TRACKING SERVO ON
FORWARD TRACK JUMP
REVERSE TRACK JUMP
SLED SERVO OFF
SLED SERVO ON
FORWARD SLED MOVE
REVERSE SLED MOVE
SLED KICK LEVEL
(
±
1
◊
basic value) (Default)
SLED KICK LEVEL
(
±
2
◊
basic value)
SLED KICK LEVEL
(
±
3
◊
basic value)
SLED KICK LEVEL
(
±
4
◊
basic value)
0
0
1
1
--
--
--
--
0
0
0
0
0
0
0
0
0
0
1
1
0
1
0
1
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
0
1
0
1
--
--
--
--
--
--
--
--
0
0
1
1
--
--
--
--
0
1
0
1
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
2
3
0 0 1 0
0 0 1 1
TRACKING
MODE
SELECT
Register
Command
Address
D23 to D20
Register
Command
Address
D23 to D20
Data 1
D19
D18
D17
D16
Data 1
D19
D18
D17
D16
Data 2
D15
D14
D13
D12
Data 2
D15
D14
D13
D12
Data 3
D11
D10
D9
D8
Data 4
D7
D6
D5
D4
Data 5
D3
D2
D1
D0
Data 3
D11
D10
D9
D8
Data 4
D7
D6
D5
D4
Data 5
D3
D2
D1
D0
--: Don't care
≠ 19 ≠
CXD2588Q/R
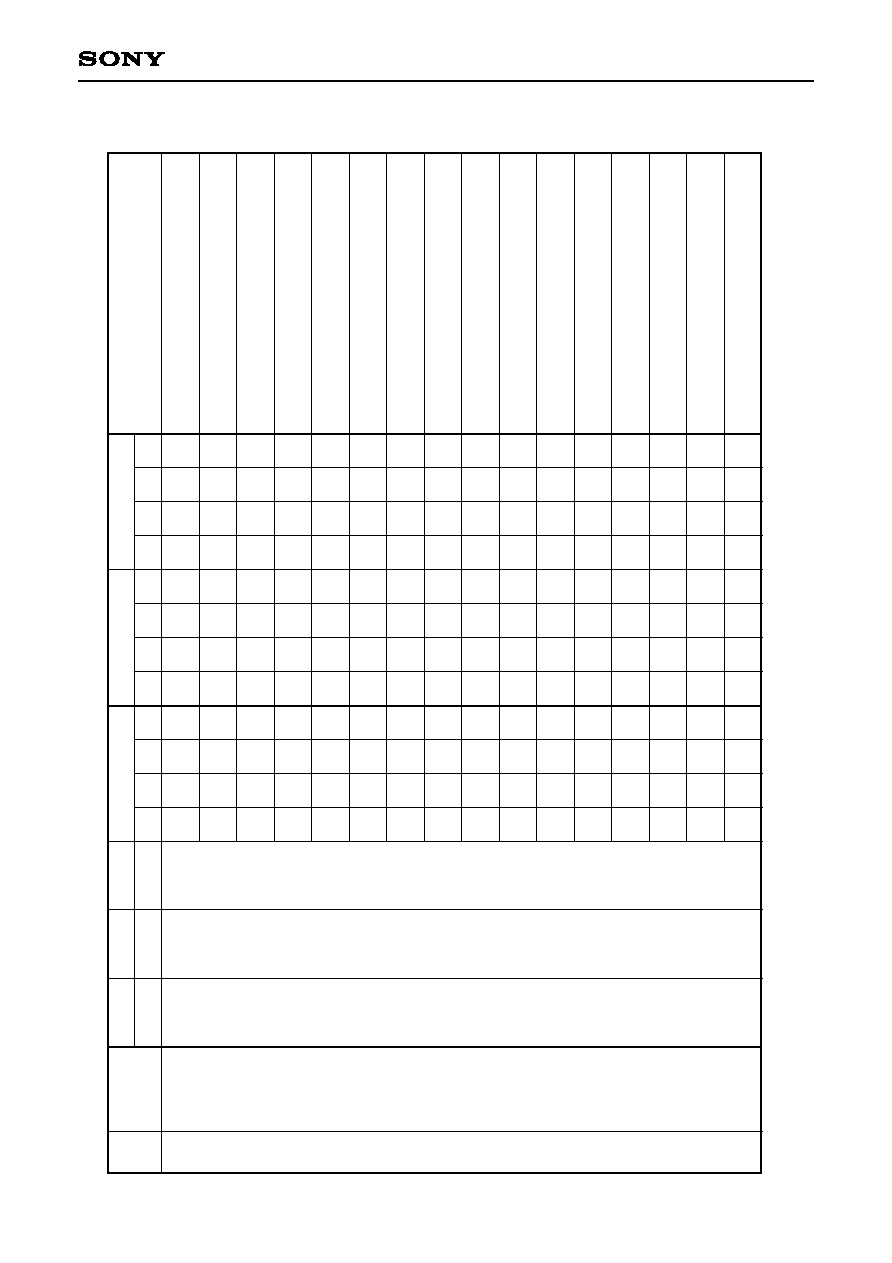
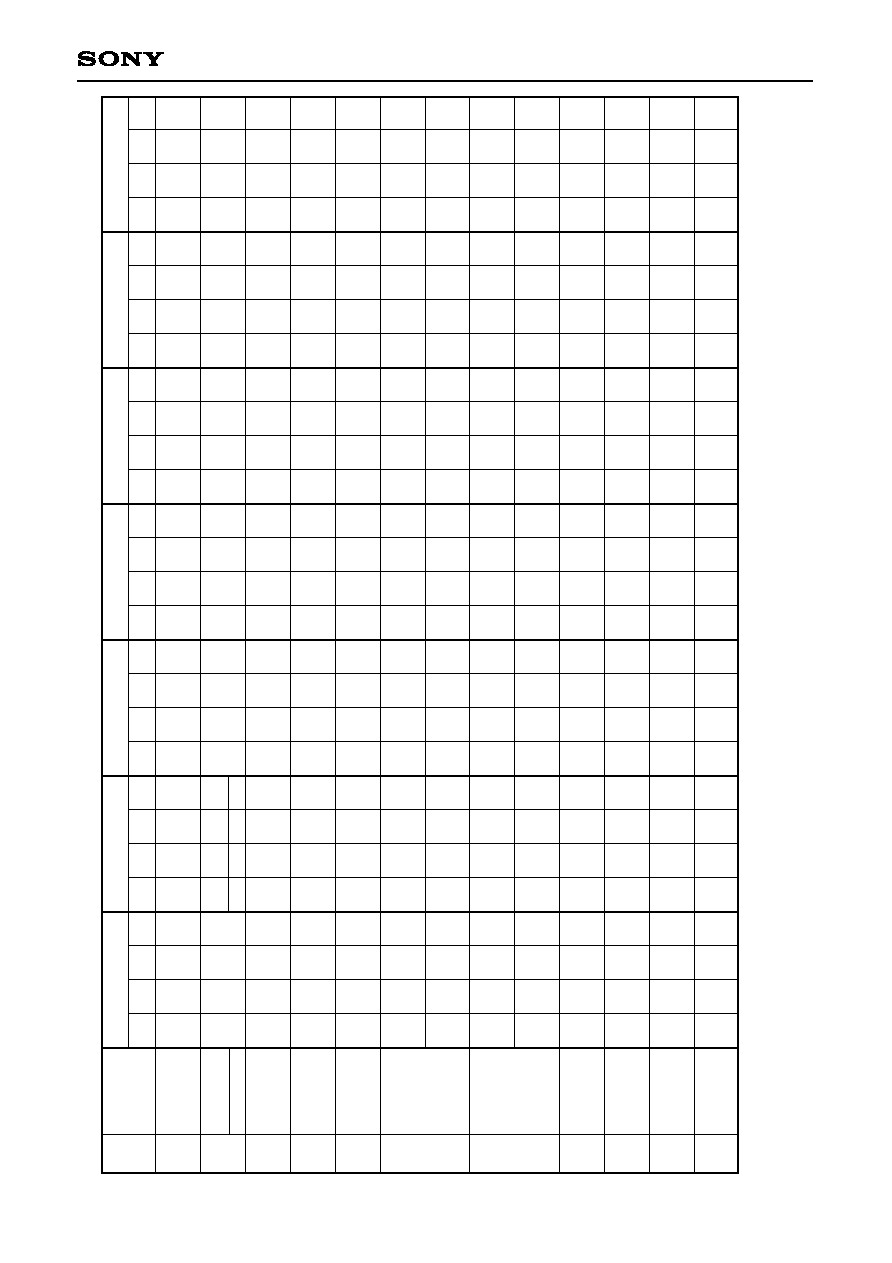
Command Table ($340X)
KRAM DATA (K00)
SLED INPUT GAIN
KRAM DATA (K01)
SLED LOW BOOST FILTER A-H
KRAM DATA (K02)
SLED LOW BOOST FILTER A-L
KRAM DATA (K03)
SLED LOW BOOST FILTER B-H
KRAM DATA (K04)
SLED LOW BOOST FILTER B-L
KRAM DATA (K05)
SLED OUTPUT GAIN
KRAM DATA (K06)
FOCUS INPUT GAIN
KRAM DATA (K07)
SLED AUTO GAIN
KRAM DATA (K08)
FOCUS HIGH CUT FILTER A
KRAM DATA (K09)
FOCUS HIGH CUT FILTER B
KRAM DATA (K0A)
FOCUS LOW BOOST FILTER A-H
KRAM DATA (K0B)
FOCUS LOW BOOST FILTER A-L
KRAM DATA (K0C)
FOCUS LOW BOOST FILTER B-H
KRAM DATA (K0D)
FOCUS LOW BOOST FILTER B-L
KRAM DATA (K0E)
FOCUS PHASE COMPENSATE FILTER A
KRAM DATA (K0F)
FOCUS DEFECT HOLD GAIN
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
3
0 0 1 1
0 1 0 0
0 0 0 0
SELECT
Register
Command
Address 1
D23 to D20
Address 2
D19 to D16
Address 3
D15 to D12
Address 4
D11
D10
D9
D8
Data 1
D7
D6
D5
D4
Data 2
D3
D2
D1
D0
≠ 20 ≠
CXD2588Q/R
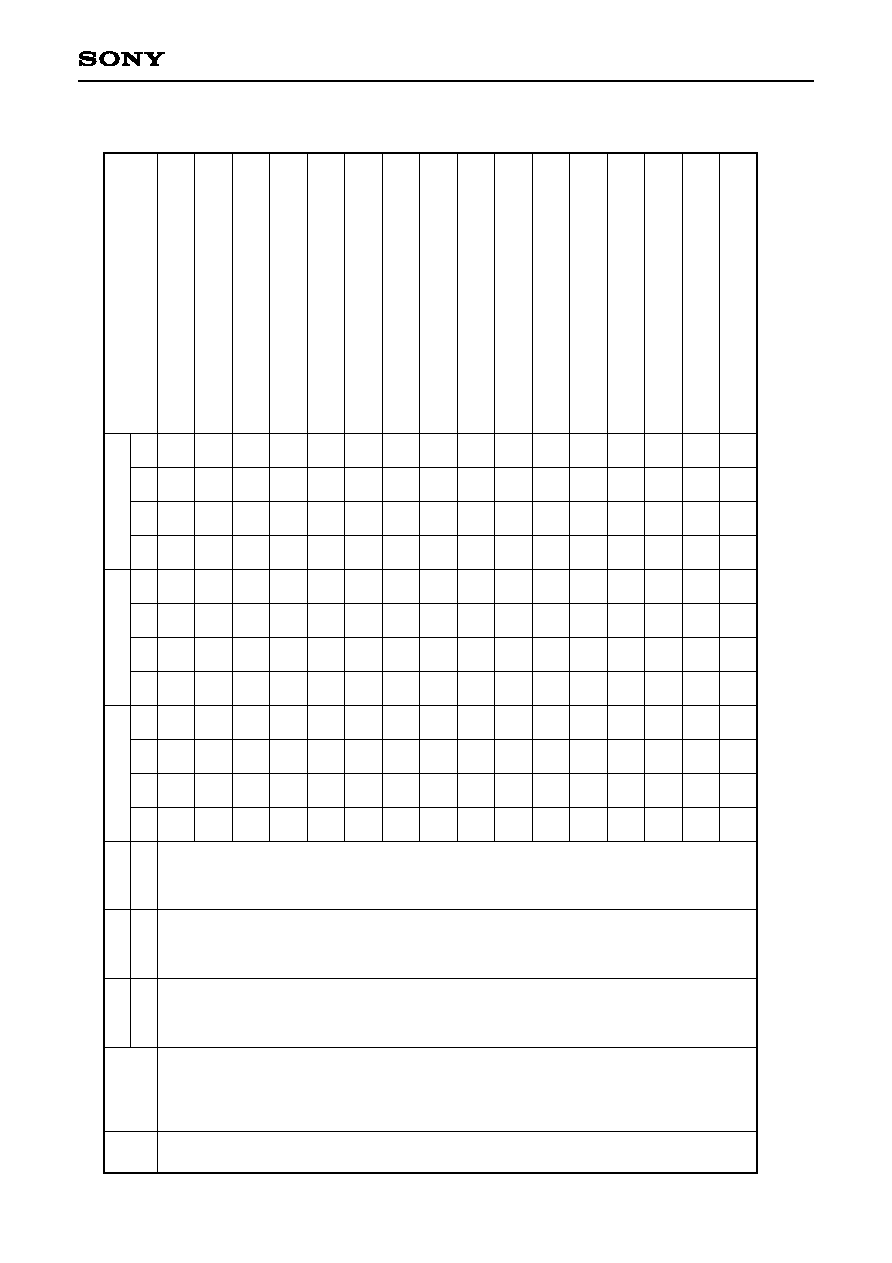
Command Table ($341X)
KRAM DATA (K10)
FOCUS PHASE COMPENSATE FILTER B
KRAM DATA (K11)
FOCUS OUTPUT GAIN
KRAM DATA (K12)
ANTI SHOCK INPUT GAIN
KRAM DATA (K13)
FOCUS AUTO GAIN
KRAM DATA (K14)
HPTZC / AUTO GAIN HIGH PASS FILTER A
KRAM DATA (K15)
HPTZC / AUTO GAIN HIGH PASS FILTER B
KRAM DATA (K16)
ANTI SHOCK HIGH PASS FILTER A
KRAM DATA (K17)
HPTZC / AUTO GAIN LOW PASS FILTER B
KRAM DATA (K18)
FIX
KRAM DATA (K19)
TRACKING INPUT GAIN
KRAM DATA (K1A)
TRACKING HIGH CUT FILTER A
KRAM DATA (K1B)
TRACKING HIGH CUT FILTER B
KRAM DATA (K1C)
TRACKING LOW BOOST FILTER A-H
KRAM DATA (K1D)
TRACKING LOW BOOST FILTER A-L
KRAM DATA (K1E)
TRACKING LOW BOOST FILTER B-H
KRAM DATA (K1F)
TRACKING LOW BOOST FILTER B-L
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
3
0 0 1 1
0 1 0 0
0 0 0 1
SELECT
Register
Command
Address 1
D23 to D20
Address 2
D19 to D16
Address 3
D15 to D12
Address 4
D11
D10
D9
D8
Data 1
D7
D6
D5
D4
Data 2
D3
D2
D1
D0

≠ 21 ≠
CXD2588Q/R
Command Table ($342X)
KRAM DATA (K20)
TRACKING PHASE COMPENSATE FILTER A
KRAM DATA (K21)
TRACKING PHASE COMPENSATE FILTER B
KRAM DATA (K22)
TRACKING OUTPUT GAIN
KRAM DATA (K23)
TRACKING AUTO GAIN
KRAM DATA (K24)
FOCUS GAIN DOWN HIGH CUT FILTER A
KRAM DATA (K25)
FOCUS GAIN DOWN HIGH CUT FILTER B
KRAM DATA (K26)
FOCUS GAIN DOWN LOW BOOST FILTER A-H
KRAM DATA (K27)
FOCUS GAIN DOWN LOW BOOST FILTER A-L
KRAM DATA (K28)
FOCUS GAIN DOWN LOW BOOST FILTER B-H
KRAM DATA (K29)
FOCUS GAIN DOWN LOW BOOST FILTER B-L
KRAM DATA (K2A)
FOCUS GAIN DOWN PHASE COMPENSATE FILTER A
KRAM DATA (K2B)
FOCUS GAIN DOWN DEFECT HOLD GAIN
KRAM DATA (K2C)
FOCUS GAIN DOWN PHASE COMPENSATE FILTER B
KRAM DATA (K2D)
FOCUS GAIN DOWN OUTPUT GAIN
KRAM DATA (K2E)
NOT USED
KRAM DATA (K2F)
NOT USED
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
3
0 0 1 1
0 1 0 0
0 0 1 0
SELECT
Register
Command
Address 1
D23 to D20
Address 2
D19 to D16
Address 3
D15 to D12
Address 4
D11
D10
D9
D8
Data 1
D7
D6
D5
D4
Data 2
D3
D2
D1
D0
≠ 22 ≠
CXD2588Q/R
Command Table ($343X)
KRAM DATA (K30)
SLED INPUT GAIN (when SFSK = 1 TG up2)
KRAM DATA (K31)
ANTI SHOCK LOW PASS FILTER B
KRAM DATA (K32)
NOT USED
KRAM DATA (K33)
ANTI SHOCK HIGH PASS FILTER B-H
KRAM DATA (K34)
ANTI SHOCK HIGH PASS FILTER B-L
KRAM DATA (K35)
ANTI SHOCK FILTER COMPARATE GAIN
KRAM DATA (K36)
TRACKING GAIN UP2 HIGH CUT FILTER A
KRAM DATA (K37)
TRACKING GAIN UP2 HIGH CUT FILTER B
KRAM DATA (K38)
TRACKING GAIN UP2 LOW BOOST FILTER A-H
KRAM DATA (K39)
TRACKING GAIN UP2 LOW BOOST FILTER A-L
KRAM DATA (K3A)
TRACKING GAIN UP2 LOW BOOST FILTER B-H
KRAM DATA (K3B)
TRACKING GAIN UP2 LOW BOOST FILTER B-L
KRAM DATA (K3C)
TRACKING GAIN UP PHASE COMPENSATE FILTER A
KRAM DATA (K3D)
TRACKING GAIN UP PHASE COMPENSATE FILTER B
KRAM DATA (K3E)
TRACKING GAIN UP OUTPUT GAIN
KRAM DATA (K3F)
NOT USED
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
3
0 0 1 1
0 1 0 0
0 0 1 1
SELECT
Register
Command
Address 1
D23 to D20
Address 2
D19 to D16
Address 3
D15 to D12
Address 4
D11
D10
D9
D8
Data 1
D7
D6
D5
D4
Data 2
D3
D2
D1
D0

≠ 23 ≠
CXD2588Q/R
Command Table ($344X)
KRAM DATA (K40)
TRACKING HOLD FILTER INPUT GAIN
KRAM DATA (K41)
TRACKING HOLD FILTER A-H
KRAM DATA (K42)
TRACKING HOLD FILTER A-L
KRAM DATA (K43)
TRACKING HOLD FILTER B-H
KRAM DATA (K44)
TRACKING HOLD FILTER B-L
KRAM DATA (K45)
TRACKING HOLD FILTER OUTPUT GAIN
KRAM DATA (K46)
TRACKING HOLD INPUT GAIN (when THSK = 1 TG up2)
KRAM DATA (K47)
NOT USED
KRAM DATA (K48)
FOCUS HOLD FILTER INPUT GAIN
KRAM DATA (K49)
FOCUS HOLD FILTER A-H
KRAM DATA (K4A)
FOCUS HOLD FILTER A-L
KRAM DATA (K4B)
FOCUS HOLD FILTER B-H
KRAM DATA (K4C)
FOCUS HOLD FILTER B-L
KRAM DATA (K4D)
FOCUS HOLD FILTER OUTPUT GAIN
KRAM DATA (K4E)
NOT USED
KRAM DATA (K4F)
NOT USED
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD7
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD6
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD5
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD4
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD3
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD2
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD1
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
KD0
3
0 0 1 1
0 1 0 0
0 1 0 0
SELECT
Register
Command
Address 1
D23 to D20
Address 2
D19 to D16
Address 3
D15 to D12
Address 4
D11
D10
D9
D8
Data 1
D7
D6
D5
D4
Data 2
D3
D2
D1
D0
≠ 24 ≠
CXD2588Q/R
Command Table ($34FX to 3FX)
0 0 1 1
1
1
1
0
0
0
0
0
1
1
0
0
1
1
FOCUS BIAS LIMIT
FOCUS BIAS DATA
TRVSC DATA
FOCUS SEARCH SPEED/
VOLTAGE/AUTO GAIN
DTZC/TRACK JUMP
VOLTAGE/AUTO GAIN
FZSL/SLED MOVE/
Voltage/AUTO GAIN
LEVEL/AUTO GAIN/
DFSW/ (Initialize)
SERIAL DATA READ
MODE/SELECT
FOCUS BIAS
Operation for MIRR/
DFCT/FOK
TZC/COUT
BOTTOM/MIRR
SLED FILTER
Filter
Others
3
0 0 1 1
0
0
0
1
1
1
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
1
1
0
0
0
1
0
FBL9
FB9
TV9
FBL8
FB8
TV8
FBL7
FB7
TV7
FBL6
FB6
TV6
FBL5
FB5
TV5
FBL4
FB4
TV4
FBL3
FB3
TV3
FBL2
FB2
TV2
FBL1
FB1
TV1
--
--
TV0
0
0
0
1
1
1
1
1
0
1
0
1
0
1
FT1
TDZC
FZSH
VCLM
DAC
0
SFO2
FT0
DTZC
FZSL
VCLC
SD6
FBON
SFO1
FS5
TJ5
SM5
FLM
SD5
FBSS
SDF2
FS4
TJ4
SM4
FLC0
SD4
FBUP
SDF1
FS3
TJ3
SM3
RFLM
SD3
FBV1
MAX2
FS2
TJ2
SM2
RFLC
SD2
FBV0
MAX1
FS1
TJ1
SM1
AGF
SD1
0
SFOX
FS0
TJ0
SM0
AGT
SD0
TJD0
BTF
FTZ
SFJP
AGS
DFSW
0
FPS1
D2V2
FG6
TG6
AGJ
LKSW
0
FPS0
D2V1
FG5
TG5
AGGF
TBLM
0
TPS1
D1V2
FG4
TG4
AGGT
TCLM
0
TPS0
D1V1
FG3
TG3
AGV1
FLC1
0
0
RINT
FG2
TG2
AGV2
TLC2
0
SJHD
0
FG1
TG1
AGHS
TLC1
0
INBK
0
FG0
TG0
AGHT
TLC0
0
MTI0
0
1
1
1
1
1
1
1
1
0
1
F1NM
0
F1DM
AGG4
F3NM
XT4D
F3DM
XT2D
T1NM
0
T1UM
DRR2
T3NM
DRR1
T3UM
DRR0
DFIS
0
TLCD
ASFG
0
FTQ
LKIN
LPAS
COIN
SRO1
MDFI
0
MIRI
AGHF
XT1D
ASOT
1
1
0
0
0
1
COSS
SFID
COTS
SFSK
CETZ
THID
CETF
THSK
COT2
0
COT1
TLD2
MOT2
TLD1
0
TLD0
BTS1
0
BTS0
0
MRC1
0
MRC0
0
0
0
0
0
0
0
0
0
SELECT
Register
Command
Address 1
D23 to D20
D19
D18
D17
D16
Address 2
D15
D14
D13
D12
Data 1
D11
D10
D9
D8
Data 2
D7
D6
D5
D4
Data 3
D3
D2
D1
D0
Address
D23 to D20
D19
D18
D17
D16
Data 1
D15
D14
D13
D12
Data 2
D11
D10
D9
D8
Data 3
D7
D6
D5
D4
Data 4
D3
D2
D1
D0
--: Don't care
≠ 25 ≠
CXD2588Q/R
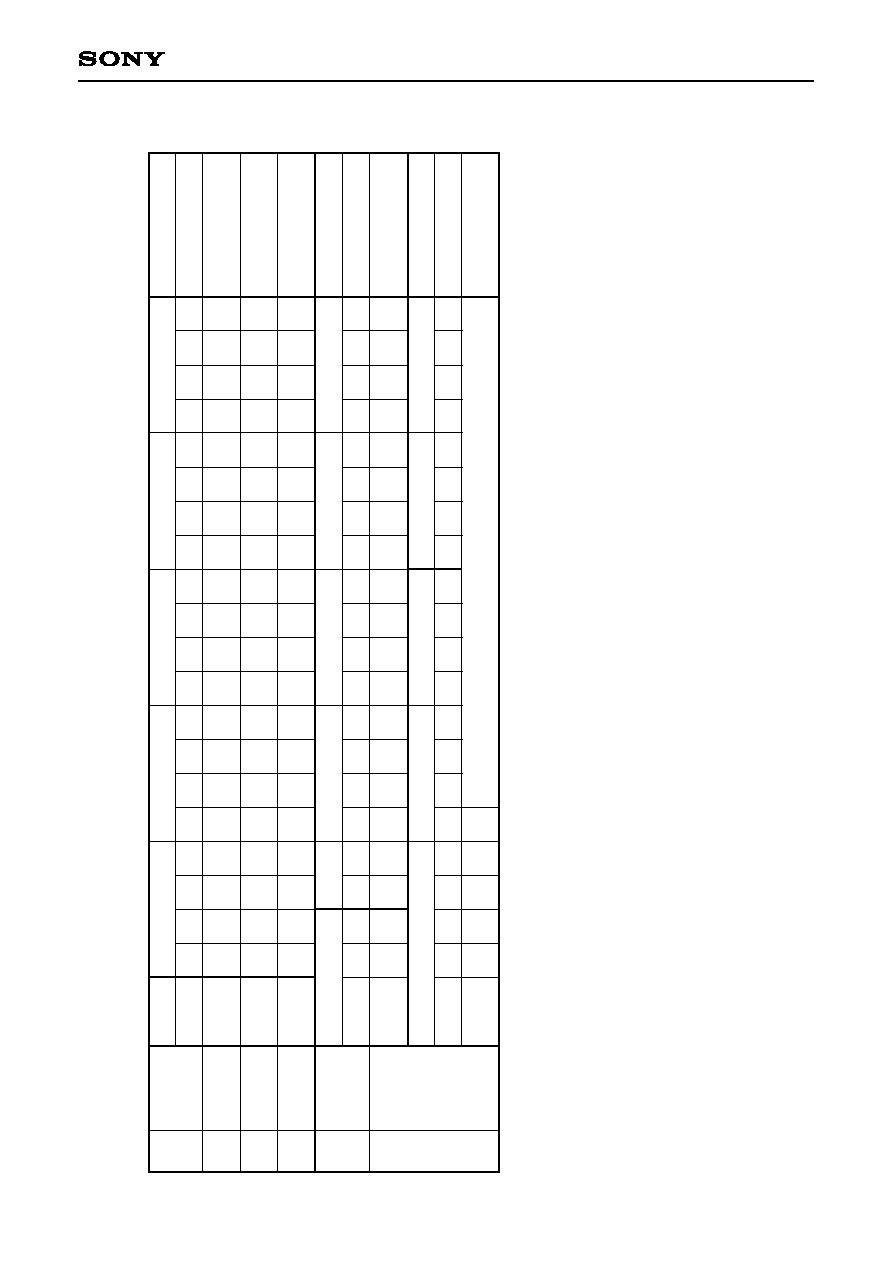
Instruction Table
Register
4
5
6
7
8
9
A
B
C
D
E
Auto sequence
Blind (A, E),
Overflow (C)
Brake (B)
KICK (D)
Auto sequence (N)
track jump
count setting
MODE
specification
Function
specification
Audio CTRL
Serial bus
CTRL
Spindle servo
coefficient setting
CLV CTRL
CLV mode
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
0
0
1
1
0
0
0
1
1
1
0
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
--
--
--
2048
VCO
SEL1
0
0
0
0
TRMI
--
VP7
EPWM
--
--
--
1024
0
0
0
0
0
TRMO
--
VP6
SPDC
--
--
--
512
SOCT
0
0
OPSL2
0
OPSL2
1
MTSL1
--
VP5
ICAP
--
--
--
256
VCO
SEL2
SYCOF
SYCOF
EMPH
EMPH
MTSL0
--
VP4
SFSL
--
--
--
128
KSL3
OPSL1
0
OPSL1
1
SMUT
SMUT
0
--
VP3
VC2C
--
--
--
64
KSL2
MCSL
MCSL
0
0
0
--
VP2
HIFC
--
--
--
32
KSL1
0
0
AD9
AD9
0
--
VP1
LPWR
--
--
--
16
KSL0
0
0
AD8
AD8
0
--
VP0
VPON
--
--
--
8
0
ZDPL
ZDPL
AD7
AD7
--
--
--
Gain
CAV1
--
--
--
4
0
ZMUT
ZMUT
AD6
AD6
--
--
--
Gain
CAV0
--
--
--
2
VCO2
THRU
--
0
AD5
AD5
--
--
--
0
--
--
--
1
0
--
0
AD4
AD4
--
--
--
0
--
--
--
--
0
--
0
AD3
AD3
--
--
--
--
--
--
--
--
0
--
DCOF
AD2
AD2
--
--
--
--
--
--
--
--
0
--
0
AD1
AD1
--
--
--
--
--
--
--
--
0
--
0
AD0
AD0
--
--
--
--
--
--
--
--
TXON
--
--
--
FMUT
--
--
--
--
--
--
--
--
TXOUT
--
--
--
LRWO
--
--
--
--
--
--
--
--
OUTL1
--
--
--
BSBST
--
--
--
--
--
--
--
--
OUTL0
--
--
--
BBSL
--
--
--
--
AS3
0.18ms
0.36ms
11.6ms
32768
CDROM
0
0
0
0
SL1
Gain
MDP1
0
CM3
AS2
0.09ms
0.18ms
5.8ms
16384
DOUT
Mute
DSPB
ON/OFF
DSPB
ON/OFF
0
0
SL0
Gain
MDP0
TB
CM2
AS1
0.05ms
0.09ms
2.9ms
8192
DOUT
ON/OFF
0
0
Mute
Mute
CPUSR
Gain
MDS1
TP
CM1
AS0
0.02ms
0.05ms
1.45ms
4096
WSEL
0
0
ATT
ATT
0
Gain
MDS0
Gain
CLVS
CM0
Command
Address
D3
D2
D1
D0
Data 1
D3
D2
D1
D0
Data 2
D3
D2
D1
D0
Data 3
D3
D2
D1
D0
Data 4
D3
D2
D1
D0
Data 5
D3
D2
D1
D0
Data 6
D3
D2
D1
D0
≠ 26 ≠
CXD2588Q/R
FOCUS SERVO OFF,
0V OUT
TRACKING GAIN UP
FILTER SELECT 1
TRACKING SERVO OFF
SLED SERVO OFF
SLED KICK LEVEL
(
±
1
◊
basic value) (Default)
KRAM DATA
($3400XX to $344fXX)
0
0
0
0
0
0
0
0
0
0
1
0
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
0
1
2
0 0 0 0
0 0 0 1
0 0 1 0
FOCUS
CONTROL
TRACKING
CONTROL
TRACKING
MODE
Register
Command
Address
D23 to D20
Data 1
D19
D18
D17
D16
Data 2
D15
D14
D13
D12
Data 3
D11
D10
D9
D8
Data 4
D7
D6
D5
D4
Data 5
D3
D2
D1
D0
Register
Command
3
SELECT
Address
D23 to D20
0 0 1 1
0 0 1 1
0
1
0
0
0
See "Coefficient ROM Preset Values Table".
0
0
0
0
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
--
Data 1
D19
D18
D17
D16
Data 2
D15
D14
D13
D12
Data 3
D11
D10
D9
D8
Data 4
D7
D6
D5
D4
Data 5
D3
D2
D0
D0
Address 1
D23 to D20
D19
D18
D17
D16
Address 2
D15
D14
D13
D12
Address 3
D11
D10
D9
D8
Data 1
D7
D6
D5
D4
Data 2
D3
D2
D0
D0
ß1-3. CPU Command Presets
Command Preset Table ($0X to 34X)
--: Don't care
≠ 27 ≠
CXD2588Q/R
Command Preset Table ($34FX to 3FX)
0 0 1 1
1
1
1
0
0
0
0
0
1
1
0
0
1
1
FOCUS BIAS LIMIT
FOCUS BIAS DATA
TRVSC DATA
FOCUS SEARCH SPEED/
VOLTAGE AUTO GAIN
DTZC/TRACK JUMP
VOLTAGE AUTO GAIN
FZSL/SLED MOVE/
Voltage/AUTO GAIN
LEVEL/AUTO GAIN/
DFSW/ (Initialize)
SERIAL DATA READ
MODE/SELECT
FOCUS BIAS
Operation for MIRR/
DFCT/FOK
TZC/COUT
BOTTOM/MIRR
SLED FILTER
3
0 0 1 1
0
0
0
1
1
1
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
1
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
1
1
0
1
0
1
0
1
0
0
0
0
0
0
1
1
0
1
0
0
0
1
0
0
0
0
0
0
1
1
0
1
0
0
0
0
1
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
1
1
1
1
0
0
0
0
0
0
1
0
0
0
1
1
1
1
0
0
0
0
1
1
0
0
0
0
0
0
1
1
0
0
0
0
1
0
0
0
0
0
0
1
1
1
1
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Filter
Others
1
1
1
1
1
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
SELECT
Register
Command
Address 1
D23 to D20
D19
D18
D17
D16
Address 2
D15
D14
D13
D12
Data 1
D11
D10
D9
D8
Data 2
D7
D6
D5
D4
Data 3
D3
D2
D1
D0
Address
D23 to D20
D19
D18
D17
D16
Data 1
D15
D14
D13
D12
Data 2
D11
D10
D9
D8
Data 3
D7
D6
D5
D4
Data 4
D3
D2
D1
D0
--: Don't care

≠ 28 ≠
CXD2588Q/R
Reset Initialization
Register
4
5
6
7
8
9
A
B
C
D
E
Auto sequence
Blind (A, E),
Overflow (C)
Brake (B)
KICK (D)
Auto sequence (N)
track jump
count setting
MODE
specification
Function
specification
Audio CTRL
Serial bus
CTRL
Spindle servo
coefficient setting
CLV CTRL
CLV mode
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
0
0
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
1
0
0
0
0
1
0
0
0
1
1
1
0
0
0
1
1
0
0
0
1
0
0
0
0
--
--
--
0
0
0
0
0
--
1
0
--
--
--
0
0
0
0
1
--
1
0
--
--
--
0
0
0
0
0
--
1
0
--
--
--
1
0
0
0
0
--
0
0
--
--
--
0
0
0
0
0
--
0
0
--
--
--
0
0
0
1
0
--
0
0
--
--
--
0
1
0
0
0
--
0
0
--
--
--
0
0
0
0
0
--
0
0
--
--
--
0
0
0
0
--
--
--
0
--
--
--
0
0
0
0
--
--
--
0
--
--
--
0
0
0
0
--
--
--
0
--
--
--
0
0
0
0
--
--
--
0
--
--
--
--
0
0
0
--
--
--
--
--
--
--
--
0
0
0
--
--
--
--
--
--
--
--
0
0
0
--
--
--
--
--
--
--
--
0
0
0
--
--
--
--
--
--
--
--
0
--
0
--
--
--
--
--
--
--
--
0
--
0
--
--
--
--
--
--
--
--
0
--
0
--
--
--
--
--
--
--
--
0
--
0
--
--
--
--
Command
Address
D3
D2
D1
D0
Data 1
D3
D2
D1
D0
Data 2
D3
D2
D1
D0
Data 3
D3
D2
D1
D0
Data 4
D3
D2
D1
D0
Data 5
D3
D2
D1
D0
Data 6
D3
D2
D1
D0
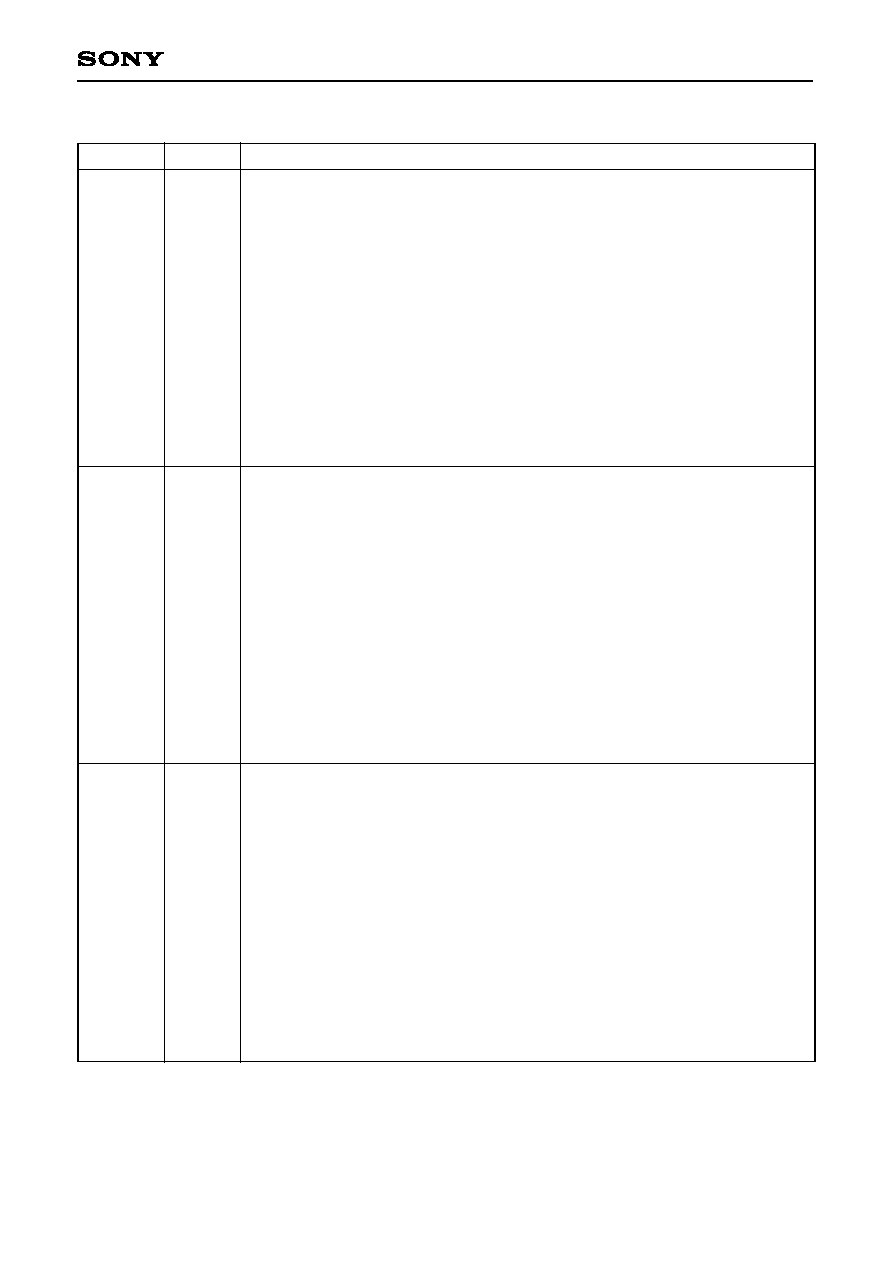
≠ 29 ≠
CXD2588Q/R
<Coefficient ROM Preset Values Table (1)>
ADDRESS
K00
K01
K02
K03
K04
K05
K06
K07
K08
K09
K0A
K0B
K0C
K0D
K0E
K0F
E0
81
23
7F
6A
10
14
30
7F
46
81
1C
7F
58
82
7F
SLED INPUT GAIN
SLED LOW BOOST FILTER A-H
SLED LOW BOOST FILTER A-L
SLED LOW BOOST FILTER B-H
SLED LOW BOOST FILTER B-L
SLED OUTPUT GAIN
FOCUS INPUT GAIN
SLED AUTO GAIN
FOCUS HIGH CUT FILTER A
FOCUS HIGH CUT FILTER B
FOCUS LOW BOOST FILTER A-H
FOCUS LOW BOOST FILTER A-L
FOCUS LOW BOOST FILTER B-H
FOCUS LOW BOOST FILTER B-L
FOCUS PHASE COMPENSATE FILTER A
FOCUS DEFECT HOLD GAIN
K10
K11
K12
K13
K14
K15
K16
K17
K18
K19
K1A
K1B
K1C
K1D
K1E
K1F
K20
K21
K22
K23
K24
K25
K26
K27
K28
K29
K2A
K2B
K2C
K2D
K2E
K2F
4E
32
20
30
80
77
80
77
00
F1
7F
3B
81
44
7F
5E
FOCUS PHASE COMPENSATE FILTER B
FOCUS OUTPUT GAIN
ANTI SHOCK INPUT GAIN
FOCUS AUTO GAIN
HPTZC / Auto Gain HIGH PASS FILTER A
HPTZC / Auto Gain HIGH PASS FILTER B
ANTI SHOCK HIGH PASS FILTER A
HPTZC / Auto Gain LOW PASS FILTER B
Fix
TRACKING INPUT GAIN
TRACKING HIGH CUT FILTER A
TRACKING HIGH CUT FILTER B
TRACKING LOW BOOST FILTER A-H
TRACKING LOW BOOST FILTER A-L
TRACKING LOW BOOST FILTER B-H
TRACKING LOW BOOST FILTER B-L
82
44
18
30
7F
46
81
3A
7F
66
82
44
4E
1B
00
00
TRACKING PHASE COMPENSATE FILTER A
TRACKING PHASE COMPENSATE FILTER B
TRACKING OUTPUT GAIN
TRACKING AUTO GAIN
FOCUS GAIN DOWN HIGH CUT FILTER A
FOCUS GAIN DOWN HIGH CUT FILTER B
FOCUS GAIN DOWN LOW BOOST FILTER A-H
FOCUS GAIN DOWN LOW BOOST FILTER A-L
FOCUS GAIN DOWN LOW BOOST FILTER B-H
FOCUS GAIN DOWN LOW BOOST FILTER B-L
FOCUS GAIN DOWN PHASE COMPENSATE FILTER A
FOCUS GAIN DOWN DEFECT HOLD GAIN
FOCUS GAIN DOWN PHASE COMPENSATE FILTER B
FOCUS GAIN DOWN OUTPUT GAIN
NOT USED
NOT USED
DATA
CONTENTS
Fix indicates that normal preset values should be used.
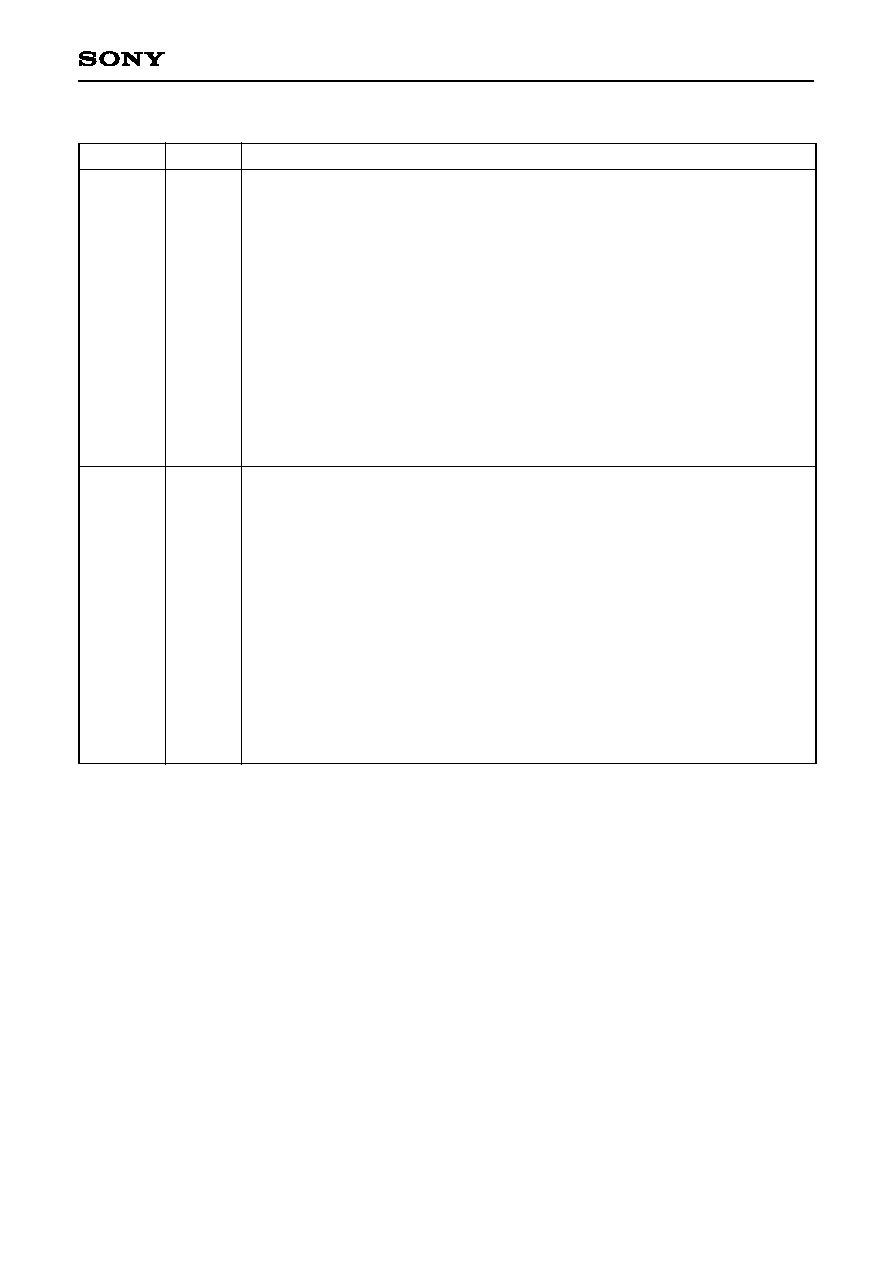
≠ 30 ≠
CXD2588Q/R
<Coefficient ROM Preset Values Table (2)>
ADDRESS
K30
K31
K32
K33
K34
K35
K36
K37
K38
K39
K3A
K3B
K3C
K3D
K3E
K3F
80
66
00
7F
6E
20
7F
3B
80
44
7F
77
86
0D
57
00
SLED INPUT GAIN (Only when TRK Gain Up2 is accessed with SFSK = 1.)
ANTI SHOCK LOW PASS FILTER B
NOT USED
ANTI SHOCK HIGH PASS FILTER B-H
ANTI SHOCK HIGH PASS FILTER B-L
ANTI SHOCK FILTER COMPARATE GAIN
TRACKING GAIN UP2 HIGH CUT FILTER A
TRACKING GAIN UP2 HIGH CUT FILTER B
TRACKING GAIN UP2 LOW BOOST FILTER A-H
TRACKING GAIN UP2 LOW BOOST FILTER A-L
TRACKING GAIN UP2 LOW BOOST FILTER B-H
TRACKING GAIN UP2 LOW BOOST FILTER B-L
TRACKING GAIN UP PHASE COMPENSATE FILTER A
TRACKING GAIN UP PHASE COMPENSATE FILTER B
TRACKING GAIN UP OUTPUT GAIN
NOT USED
K40
K41
K42
K43
K44
K45
K46
K47
K48
K49
K4A
K4B
K4C
K4D
K4E
K4F
04
7F
7F
79
17
6D
00
00
02
7F
7F
79
17
54
00
00
TRACKING HOLD FILTER INPUT GAIN
TRACKING HOLD FILTER A-H
TRACKING HOLD FILTER A-L
TRACKING HOLD FILTER B-H
TRACKING HOLD FILTER B-L
TRACKING HOLD FILTER OUTPUT GAIN
TRACKING HOLD FILTER INPUT GAIN (Only when TRK Gain Up2 is a accessed with THSK = 1.)
NOT USED
FOCUS HOLD FILTER INPUT GAIN
FOCUS HOLD FILTER A-H
FOCUS HOLD FILTER A-L
FOCUS HOLD FILTER B-H
FOCUS HOLD FILTER B-L
FOCUS HOLD FILTER OUTPUT GAIN
NOT USED
NOT USED
DATA
CONTENTS
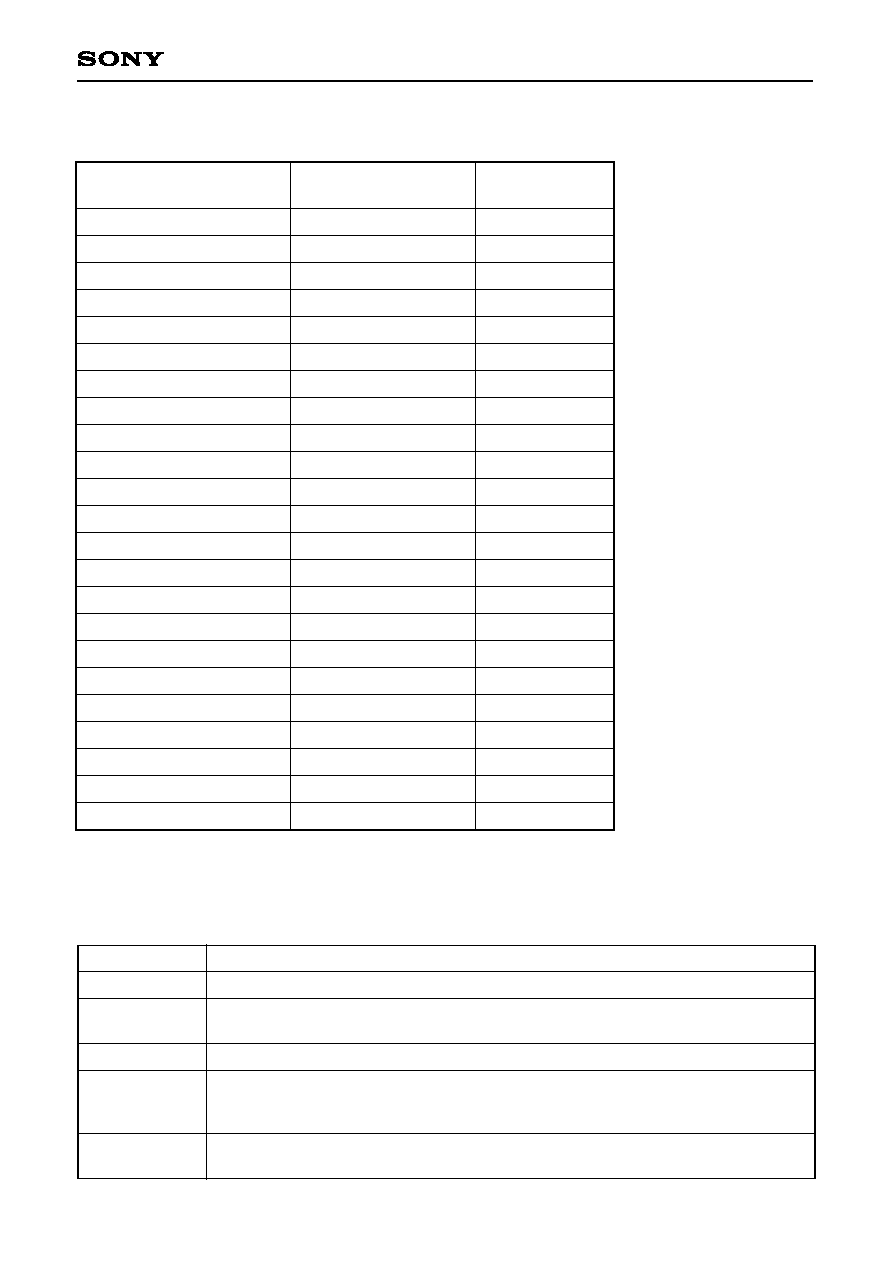
≠ 31 ≠
CXD2588Q/R
ß1-4. Description of SENS Signals and Commands
SENS output
The SENS output can be read from the SQSO pin when SOUT = 0, SL1 = 1 and SL0 = 0.
$38 outputs AGOK during AGT and AGF command settings, and XAVEBSY during AVRG measurement.
SSTP is output in all other cases.
Microcomputer serial register
(latching not required)
$0X
$1X
$2X
$30 to 37
$38
$38
$3904
$3908
$390C
$391C
$391D
$391F
$3A
$3B to 3F
$4X
$5X
$6X, 7X, 8X, 9X
$AX
$BX
$CX
$DX
$EX
$FX
SENS output
FZC
As (Anti Shock)
TZC
SSTP
AGOK
XA VEBSY
TE Avrg Reg.
FE Avrg Reg.
VC Avrg Reg.
TRVSC Reg.
FB Reg.
RFDC Avrg. Reg.
FBIAS count STOP
SSTP
XBUSY
FOK
0
GFS
0
COUT frequency division
0
OV64
0
Output data length
--
--
--
--
--
--
9bit
9bit
9bit
9bit
9bit
8bit
--
--
--
--
--
--
--
--
--
--
--
Description of SENS Signals
Low while the auto sequencer is in operation, high when operation terminates.
Outputs the same signal as the FOK pin.
High for "focus OK".
High when the regenerated frame sync is obtained with the correct timing.
Counts the number of tracks with frequency division ratio set by $B.
High when $C is latched, and toggles each time COUT is counted just for the frequency
division ratio set by $B.
Low when the EFM signal is lengthened by 64 channel clock pulses or more after passing
through the sync detection filter.
XBUSY
FOK
GFS
COUT
frequency
division
OV64
SENS output
Contents

≠ 32 ≠
CXD2588Q/R
The meaning of the data for each address is explained below.
$4X commands
RXF = 0 FORWARD
RXF = 1 REVERSE
∑ When the Focus-on command ($47) is canceled, $02 is sent and the auto sequence is interrupted.
∑ When the Track jump/Move commands ($48 to $4F) are canceled, $25 is sent and the auto sequence is
interrupted.
$5X commands
Auto sequence timer setting
Set timers: A, E, C, B
e.g.) D2 = D0 = 1, D3 = D1 = 0 (Initial Reset)
A = E = C = 0.11ms
B = 0.23ms
$6X commands
Auto sequence timer setting
Set timer: D
e.g.) D3 = 0, D2 = D1 = D0 = 1 (Initial Reset)
D = 10.15ms
$7X commands
Auto sequence track jump/move count setting (N)
This command is used to set N when a 2N-track jump or N-track move is executed for auto sequence.
∑ The maximum track count is 65,535, but note that with a 2N-track jump the maximum track jump count
depends on the mechanical limitations of the optical system.
∑ The number of tracks jumped is counted according to the COUT signals.
CANCEL
FOCUS-ON
1 TRACK JUMP
10 TRACK JUMP
2 NTRACK JUMP
N TRACK MOVE
0
0
1
1
1
1
0
1
0
0
1
1
0
1
0
1
0
1
0
1
RXF
RXF
RXF
RXF
Command
AS3
AS2
AS1
AS0
Blind (A, E), Over flow (C)
Brake (B)
0.18ms
0.36ms
0.09ms
0.18ms
0.05ms
0.09ms
0.02ms
0.05ms
Command
D23
D22
D21
D20
KICK (D)
11.6ms
5.8ms
2.9ms
1.45ms
Command
Command
Data 1
Data 2
Data 3
Data 4
D3
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
2
15
2
14
2
13
2
12
2
11
2
10
2
9
2
8
2
7
2
6
2
5
2
4
2
3
2
2
2
1
2
0
Auto sequence track jump
count setting
D23
D22
D21
D20
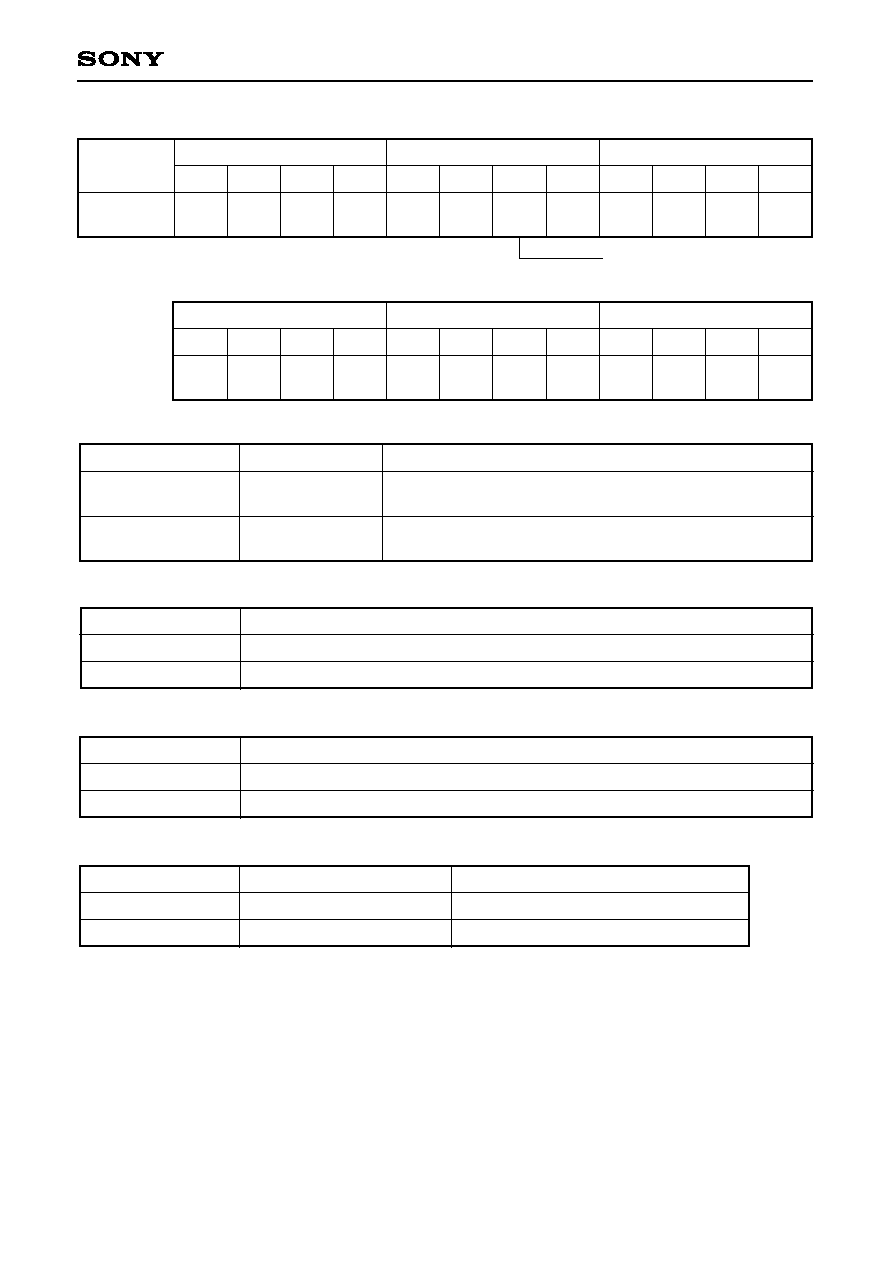
≠ 33 ≠
CXD2588Q/R
Command bit
C2PO timing
CDROM = 1
CDROM = 0
See Timing
Chart 1-1.
See Timing
Chart 1-1.
CDROM mode; average value interpolation and pre-value hold
are not performed.
Audio mode; average value interpolation and pre-value hold
are performed.
Processing
Command bit
DOUT Mute = 1
DOUT Mute = 0
Digital Out output is muted. (DA output is not muted.)
If other mute conditions are not set, Digital Out is not muted.
Processing
Command bit
DOUT ON/OFF = 1
DOUT ON/OFF = 0
Digital Out is output from the DOUT pin.
Digital Out is not output from the DOUT pin.
Processing
Command bit
Sync protection window width
WSEL = 1
WSEL = 0
±26 channel clock
1
±6 channel clock
Anti-rolling is enhanced.
Sync window protection is enhanced.
Application
1
In normal-speed playback, channel clock = 4.3218MHz.
Command
D3
CDROM
DOUT
Mute
DOUT
ON/OFF
WSEL
VCO
SEL1
0
SOCT
VCO
SEL2
KSL3
KSL2
KSL1
KSL0
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 1
Data 2
Mode
specification
Data 3
D3
0
0
VCO2
THRU
0
0
0
0
0
TXON TXOUT OUTL1 OUTL0
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 4
Data 5
Data 6
$8X commands
See "$BX Commands".
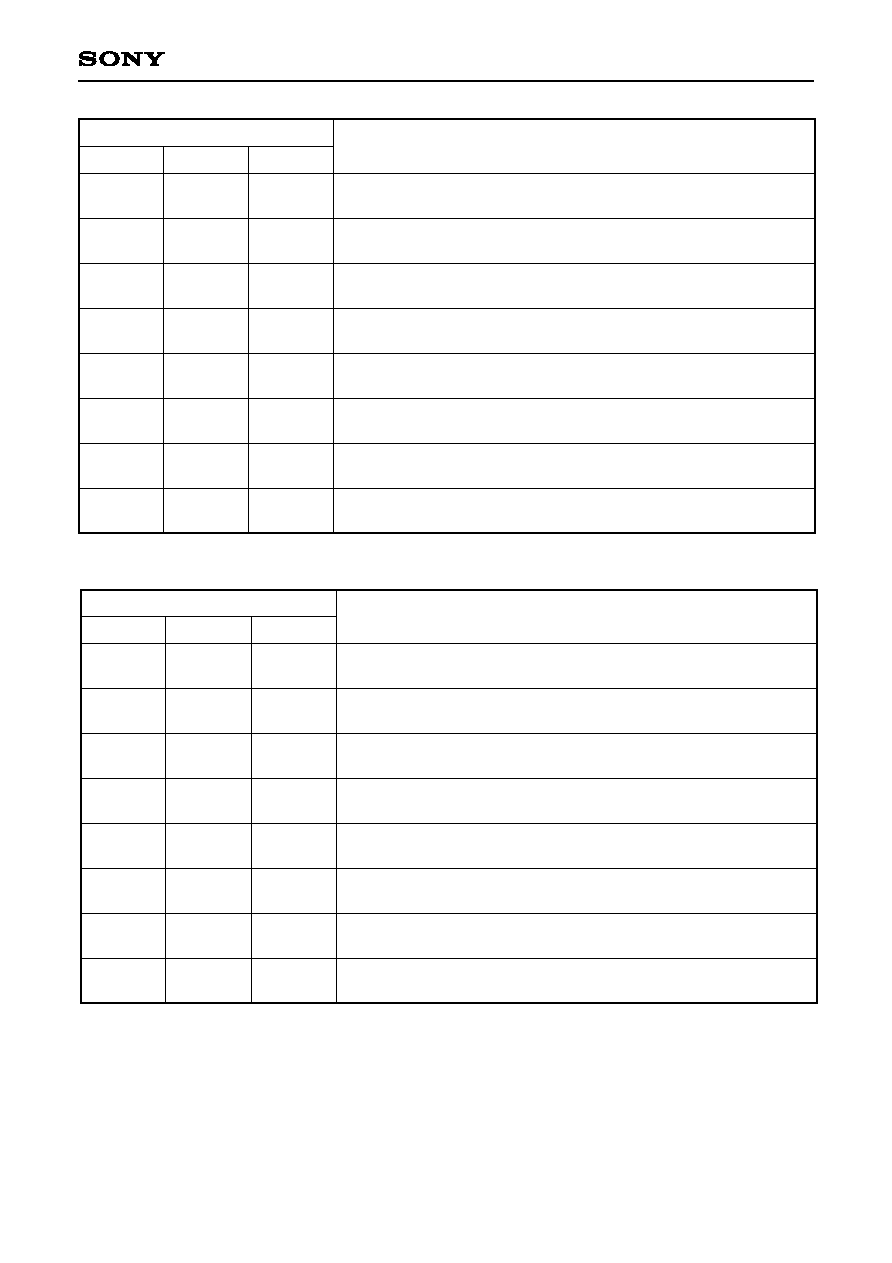
≠ 34 ≠
CXD2588Q/R
Command bit
VCOSEL1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Multiplier PLL VCO1 is set to normal speed, and the output is 1/1
frequency-divided.
Multiplier PLL VCO1 is set to normal speed, and the output is 1/2
frequency-divided.
Multiplier PLL VCO1 is set to normal speed, and the output is 1/4
frequency-divided.
Multiplier PLL VCO1 is set to normal speed, and the output is 1/8
frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is 1/1
frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is 1/2
frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is 1/4
frequency-divided.
Multiplier PLL VCO1 is set to high speed
1
, and the output is 1/8
frequency-divided.
KSL3
KSL2
Processing
1
Approximately twice the normal speed
Command bit
VCOSEL2
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Wide-band PLL VCO2 is set to normal speed, and the output is 1/1
frequency-divided.
Wide-band PLL VCO2 is set to normal speed, and the output is 1/2
frequency-divided.
Wide-band PLL VCO2 is set to normal speed, and the output is 1/4
frequency-divided.
Wide-band PLL VCO2 is set to normal speed, and the output is 1/8
frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is 1/1
frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is 1/2
frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is 1/4
frequency-divided.
Wide-band PLL VCO2 is set to high speed
2
, and the output is 1/8
frequency-divided.
KSL1
KSL0
Processing
2
Approximately twice the normal speed

≠ 35 ≠
CXD2588Q/R
Command bit
VCO2 THRU = 0
Processing
V16M output is internally connected to VCKI. Set VCKI to low.
V16M output is not internally connected. Input the clock from VCKI.
These bits select the internal or external connection for the VCO2 used in CAV-W mode.
VCO2 THRU = 1
Command bit
TXON = 0
Processing
When CD TEXT data is not demodulated, set TXON to 0.
When CD TEXT data is demodulated, set TXON to 1.
See "$4-14. CD TEXT Data Demodulation"
TXON = 1
Command bit
TXOUT = 0
Processing
Various signals except for CD TEXT is output from the SQSO pin.
CD TEXT data is output from the SQSO pin.
See "$4-14. CD TEXT Data Demodulation"
TXOUT = 1
Command bit
OUTL1 = 0
Processing
WFCK, XPCK C4M, WDCK and FSTO are output. The signal input to FSTI is supplied
to the digital servo block.
WFCK, XPCK C4M, WDCK and FSTO outputs are set to low. FSTO and FSTI are
internally connected. Set FSTI to low.
OUTL1 = 1
Command bit
OUTL0 = 0
OUTL0 = 1
Processing
PCMD, BCK, LRCK and EMPH are output.
PCMD, BCK, LRCK and EMPH outputs are low.
PCMD and PCMDI, BCK and BCKI, LRCK and LRCKI and EMPH and EMPHI are
internally connected. Set PCMDI, BCKI, LRCKI and EMPHI to low.

≠ 36 ≠
CXD2588Q/R
Timing Chart 1-1
R
c
h
1
6
b
i
t
C
2
P
o
i
n
t
e
r
L
c
h
1
6
b
i
t
C
2
P
o
i
n
t
e
r
I
f
C
2
P
o
i
n
t
e
r
=
1
,
d
a
t
a
i
s
N
G
C
2
P
o
i
n
t
e
r
f
o
r
u
p
p
e
r
8
b
i
t
s
C
2
P
o
i
n
t
e
r
f
o
r
l
o
w
e
r
8
b
i
t
s
R
c
h
C
2
P
o
i
n
t
e
r
C
2
P
o
i
n
t
e
r
f
o
r
u
p
p
e
r
8
b
i
t
s
C
2
P
o
i
n
t
e
r
f
o
r
l
o
w
e
r
8
b
i
t
s
L
c
h
C
2
P
o
i
n
t
e
r
L
R
C
K
C
D
R
O
M
=
0
C
D
R
O
M
=
1
C
2
P
O
C
2
P
O
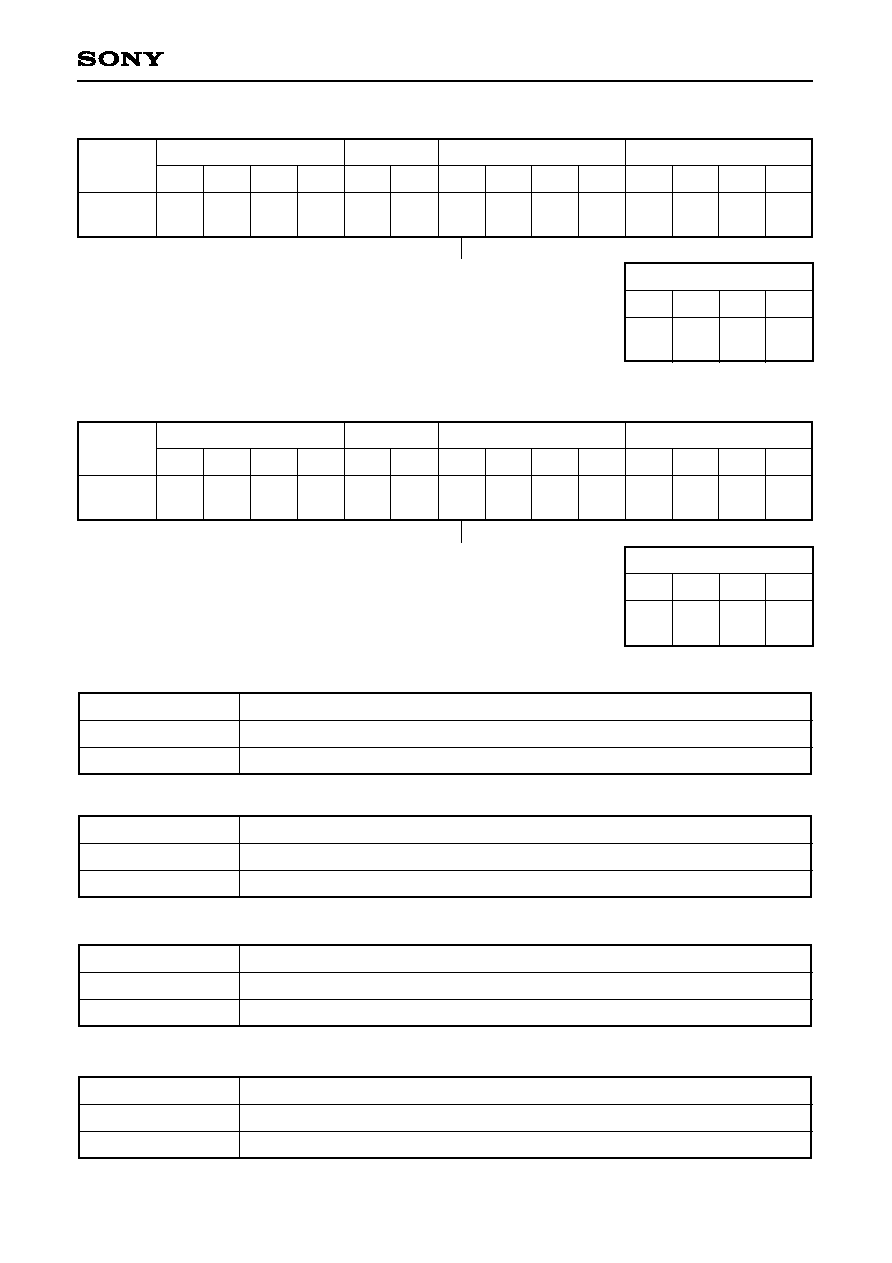
≠ 37 ≠
CXD2588Q/R
$9X commands (OPSL1= 0)
Data 2 D0 and subsequent data are for DF/DAC function settings.
Command bit
DSPB = 1
DSPB = 0
Double-speed playback (CD-DSP block)
Normal-speed playback (CD-DSP block)
Processing
Command bit
SYCOF = 1
SYCOF = 0
LRCK asynchronous mode
Normal operation
Processing
Command bit
OPSL1 = 1
OPSL1 = 0
DCOF can be set.
DCOF cannot be set.
Processing
Command bit
MCSL = 1
MCSL = 0
DF/DAC block master clock selection. Crystal = 768Fs (33.8688MHz)
DF/DAC block master clock selection. Crystal = 384Fs (16.9344MHz)
Processing
Command
Data 1
D3
0
DSPB
ON/OFF
0
0
0
MCSL
0
0
ZDPL ZMUT
--
--
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 3
Data 4
Data 2
Function
specification
000 SYCOF
D3 to D1
D0
OPSL1
D3
--
--
--
--
D2
D1
D0
Data 5
$9X commands (OPSL1= 1)
Data 2 D0 and subsequent data are for DF/DAC function settings.
Command
Data 1
D3
0
DSPB
ON/OFF
0
0
1
MCSL
0
0
ZDPL ZMUT
0
0
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 3
Data 4
Data 2
Function
specification
000 SYCOF
D3 to D1
D0
OPSL1
D3
0
DCOF
0
0
D2
D1
D0
Data 5
Set SYCOF = 0 in advance when setting the $AX command LRWO to 1.
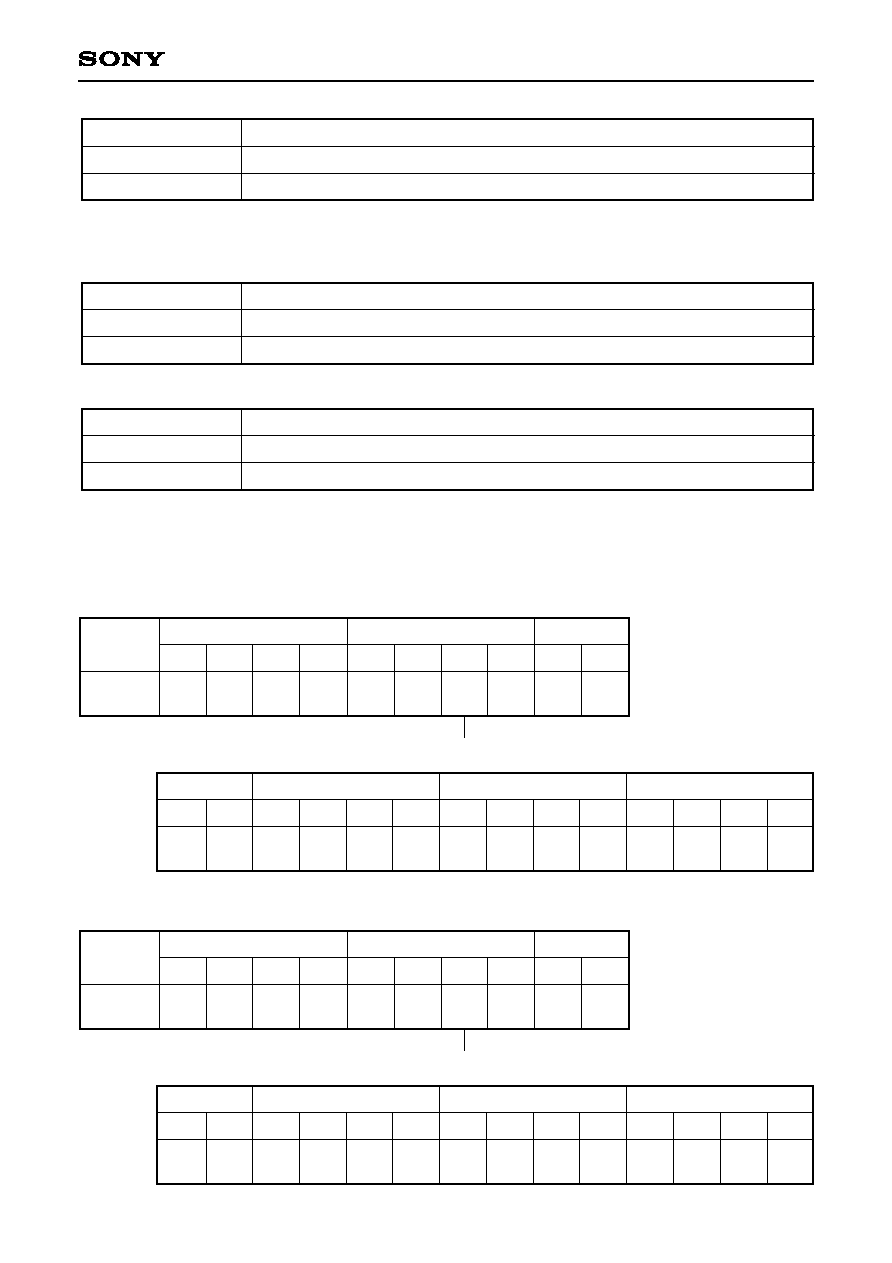
≠ 38 ≠
CXD2588Q/R
Command bit
ZDPL = 1
ZDPL = 0
LMUT and RMUT pins are high when muted.
LMUT and RMUT pins are low when muted.
Processing
See "Mute flag output" for the mute flag output conditions.
Command bit
DCOF = 1
DCOF = 0
DC offset is off.
DC offset is on.
Processing
DCOF can be set when OPSL1 = 1.
Set DC offset to off when zero detection mute is on.
Command bit
ZMUT = 1
ZMUT = 0
Zero detection mute is on.
Zero detection mute is off.
Processing
$AX commands (OPSL2 = 0)
Data 2 and subsequent data are for DF/DAC function settings.
Command
Data 1
D3
0
0
Mute
ATT
0
0
0
EMPH
D2
D1
D0
D3
D2
D1
D0
Data 2
Data 3
Audio CTRL
SMUT
0
D3
D2
OPSL2
Data 4
D3
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0
--
--
--
--
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 5
Data 6
Data 3
AD9
AD8
D1
D0
$AX commands (OPSL2 = 1)
Data 2 and subsequent data are for DF/DAC function settings.
Command
Data 1
D3
0
0
Mute
ATT
0
0
1
EMPH
D2
D1
D0
D3
D2
D1
D0
Data 2
Data 3
Audio CTRL
SMUT
0
D3
D2
OPSL2
Data 4
D3
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0 FMUT LRWO BSBST BBSL
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 5
Data 6
Data 3
AD9
AD8
D1
D0
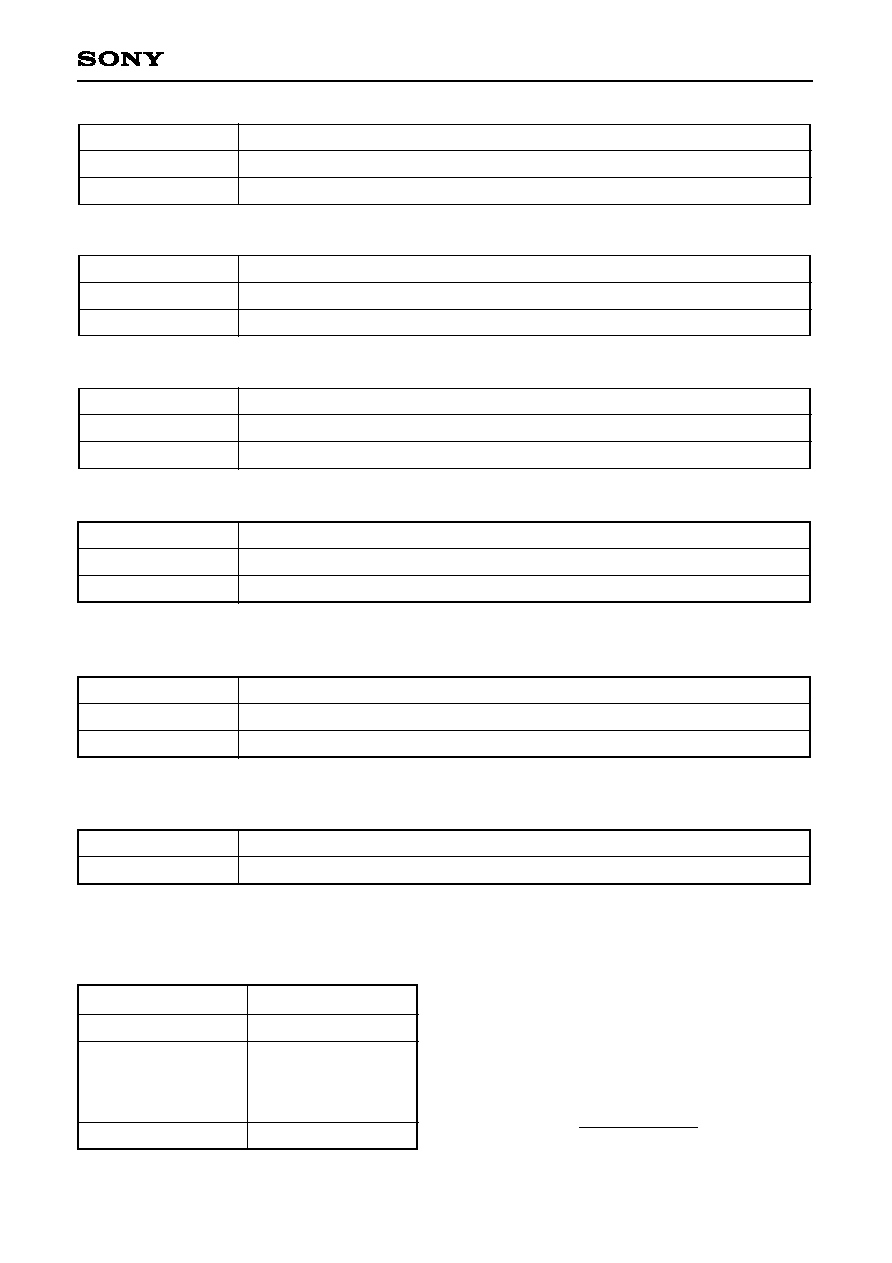
≠ 39 ≠
CXD2588Q/R
The attenuation data consists of 11 bits, and is set as follows.
Attenuation data
400h
3FEh
3FDh
:
001h
000h
0dB
≠0.0085dB
≠0.0170dB
≠60.206dB
≠
Audio output
Command bit
EMPH = 1
EMPH = 0
De-emphasis is on.
De-emphasis is off.
Processing
If either the EMPHI pin or EMPH is high, de-emphasis is on.
If either the SMUT pin or SMUT is high, soft mute is on.
Command bit
SMUT = 1
SMUT = 0
Soft mute is on.
Soft mute is off.
Processing
Command bit
AD10 to 0
Attenuation data.
Meaning
Command bit
Mute = 1
Mute = 0
CD-DSP block mute is on. 0 data is output from the CD-DSP block.
CD-DSP block mute is off.
Processing
Command bit
ATT = 1
ATT = 0
CD-DSP block output is attenuated (≠12dB).
CD-DSP block output attenuation is off.
Processing
Command bit
OPSL2 = 1
OPSL2 = 0
FMUT, LRWO, BSBST and BBSL can be set.
FMUT, LRWO, BSBST and BBSL cannot be set.
Meaning
The attenuation data (AD10 to AD0) consists of 11bits,
and can be set in 1024 different ways in the range of
000h to 400h.
The audio output from 001h to 400h is obtained using
the following equation.
Audio output = 20log [dB]
Attenuation data
1024
≠ 40 ≠
CXD2588Q/R
Command bit
FMUT = 1
FMUT = 0
Forced mute is on.
Forced mute is off.
Meaning
FMUT can be set when OPSL2 = 1.
Command bit
BSBST = 1
BSBST = 0
Bass boost is on.
Bass boost is off.
Processing
BSBST can be set when OPSL2 = 1.
Command bit
BBSL = 1
BBSL = 0
Bass boost is Max.
Bass boost is Mid.
Processing
BBSL can be set when OPSL2 = 1.
Command bit
LRWO = 1
LRWO = 0
Forced synchronization mode
Note)
Normal operation.
Meaning
LRWO can be set when OPSL2 = 1.
Note) Synchronization is performed at the first falling edge of LRCK during reset, so there is normally no need
to set this mode. However, synchronization can be forcibly performed by setting LRWO = 1.

≠ 41 ≠
CXD2588Q/R
Command
D3
SL1
SL0
CPUSR
0
D2
D1
D0
TRM1
D3
TRM0
D2
MTSL1
D1
MTSL0
D0
Data 1
Data 2
Serial bus
CTRL
$BX commands
SOCT
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
SubQ
Peak meter
SENS
D
SubQ
A
B
C
SL1
SL0
mode
The SQSO pin output can be switched to the various
signals by setting the SOCT command of $8X and the SL1
and SL0 commands of $BX. Set SQCK to high at the
falling edge of XLAT.
Except for Sub Q and peak meter, the signals are loaded
to the register when they are set at the falling edge of
XLAT. Sub Q is loaded to the register with each SCOR,
and Peak meter is loaded when a peak is detected.
m
o
d
e
A
X
L
A
T
S
Q
C
K
m
o
d
e
B
m
o
d
e
C
m
o
d
e
D
P
e
a
k
m
e
t
e
r
P
E
R
1
P
E
R
2
P
E
R
3
P
E
R
4
P
E
R
5
P
E
R
6
P
E
R
7
C
1
F
1
0
C
1
F
2
C
2
F
1
0
C
2
F
2
F
O
K
L
O
C
K
G
F
S
E
M
P
H
V
F
0
A
L
O
C
K
V
F
1
V
F
2
V
F
3
V
F
4
V
F
5
V
F
6
V
F
7
V
F
0
V
F
1
V
F
2
V
F
3
V
F
4
V
F
5
V
F
6
V
F
7
A
L
O
C
K
C
1
F
1
C
1
F
2
0
C
2
F
1
0
C
2
F
2
F
O
K
L
O
C
K
G
F
S
E
M
P
H
P
E
R
1
P
E
R
2
P
E
R
3
P
E
R
4
P
E
R
5
P
E
R
6
P
E
R
7
P
E
R
0
C
1
F
1
C
1
F
2
0
C
2
F
1
0
C
2
F
2
F
O
K
L
O
C
K
G
F
S
E
M
P
H
0
P
E
R
0
S
P
O
A
C
1
F
1
C
1
F
2
C
2
F
1
C
2
F
2
X
R
A
O
F
F
O
K
G
F
S
L
0
L
1
L
2
L
3
L
4
L
5
L
6
L
7
R
0
R
1
R
2
R
3
R
4
R
5
R
6
R
7
L
O
C
K
E
M
P
H
R
F
C
K
W
F
C
K
S
C
O
R
0
0
S
P
O
B
G
T
O
P
≠ 42 ≠
CXD2588Q/R
Signal
PER0 to 7
FOK
GFS
LOCK
EMPH
ALOCK
VF0 to 7
SPOA, B
WFCK
SCOR
GTOP
RFCK
XRAOF
L0 to L7,
R0 to R7
RF jitter amount (used to adjust the focus bias). 8-bit binary data in PER0 = LSB, PER7 = MSB.
Focus OK
High when the frame sync and the insertion protection timing match.
GFS is sampled at 460Hz; when GFS is high, a high signal is output. If GFS is low eight
consecutive samples, a low signal is output.
High when the playback disc has emphasis.
GFS is sampled at 460Hz; when GFS is high eight consecutive samples, a high signal is
output. If GFS is low eight consecutive samples, a low signal is output.
Used in CAV-W mode. Results of measuring the disc rotational velocity. (See Timing Chart 2-3.)
VF0 = LSB, VF7 = MSB.
SPOA and B pin inputs.
Write frame clock output.
High when either subcode sync S0 or S1 is detected.
High when the sync protection window is open.
Read frame clock output.
Low when the built-in 16K RAM exceeds the ±4 frame jitter margin.
Peak meter register output. L0 to 7 are the left-channel and R0 to 7 are the right-channel peak
data. L0 and R0 are LSB.
Description
C1F1
0
1
1
0
0
1
No Error
Single Error Correction
Irretrievable Error
C1F2
C1 correction status
C2F1
0
1
1
0
0
1
No Error
Single Error Correction
Irretrievable Error
C2F2
C2 correction status
Command bit
CPUSR = 1
CPUSR = 0
XLON pin is high.
XLON pin is low.
Processing
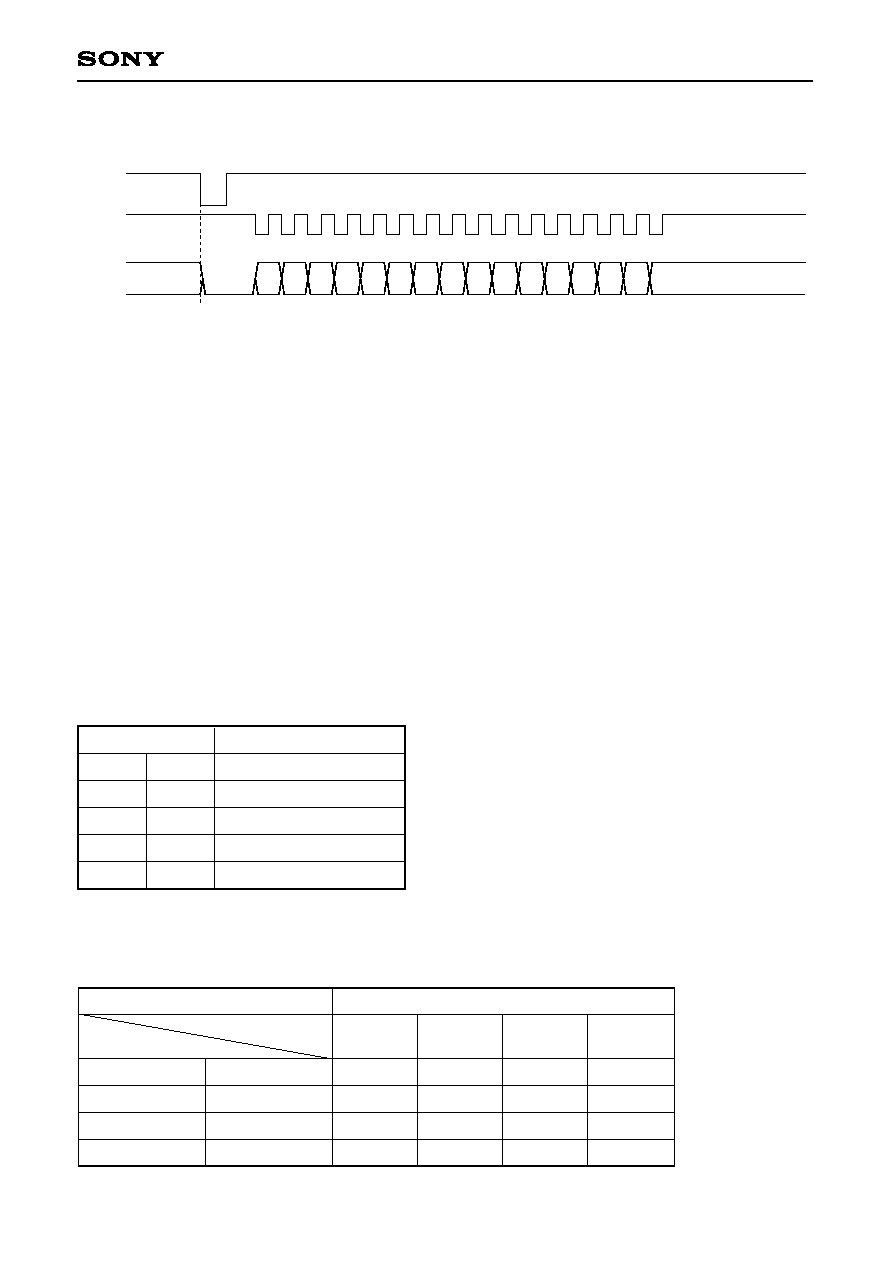
≠ 43 ≠
CXD2588Q/R
Peak meter
SQSO
XLAT
SQCK
(Peak meter)
L0
L1
L2
L3
L4
L5
L6
L7
R0
R1
R2
R3
R4
R5
R6
R7
Setting the SOCT command of $8X to 0 and the SL1 and SL0 commands of $BX to 0 and 1, respectively,
results in peak detection mode. The SQSO output is connected to the peak register. The maximum PCM data
values (absolute value, upper 8bits) for the left and right channels can be read from SQSO by inputting 16
clocks to SQCK. Peak detection is not performed during SQCK input, and the peak register does not change
during readout. This SQCK input judgment uses a retriggerable monostable multivibrator with a time constant
of 270µs to 400µs. The time during which SQCK input is high should be 270µs or less. Also, peak detection is
restarted 270µs to 400µs after SQCK input.
The peak register is reset with each readout (16 clocks input to SQCK).
The maximum value in peak detection mode is detected and held in this status until the next readout. When
switching to peak detection mode, readout should be performed one time initially to reset the peak register.
Peak detection can also be performed for previous value hold and average value interpolation data.
Traverse monitor count value setting
These bits are set when monitoring the traverse condition of the SENS output according to the COUT
frequency division.
Command bit
0
0
1
1
0
1
0
1
1/64 frequency division
1/128 frequency division
1/256 frequency division
1/512 frequency division
TRM1
XUGF
MNT1
RFCK
XUGF
XPCK
MNT0
XPCK
XPCK
GFS
MNT3
XROF
GFS
C2PO
C2PO
GTOP
C2PO
MTSL1
0
0
1
Command bit
MTSL0
0
1
0
Symbol
TRM0
Processing
Output data
Monitor output switching
The monitor output can be switched to the various signals by setting the MTSL1 and MTSL0 commands of $B.
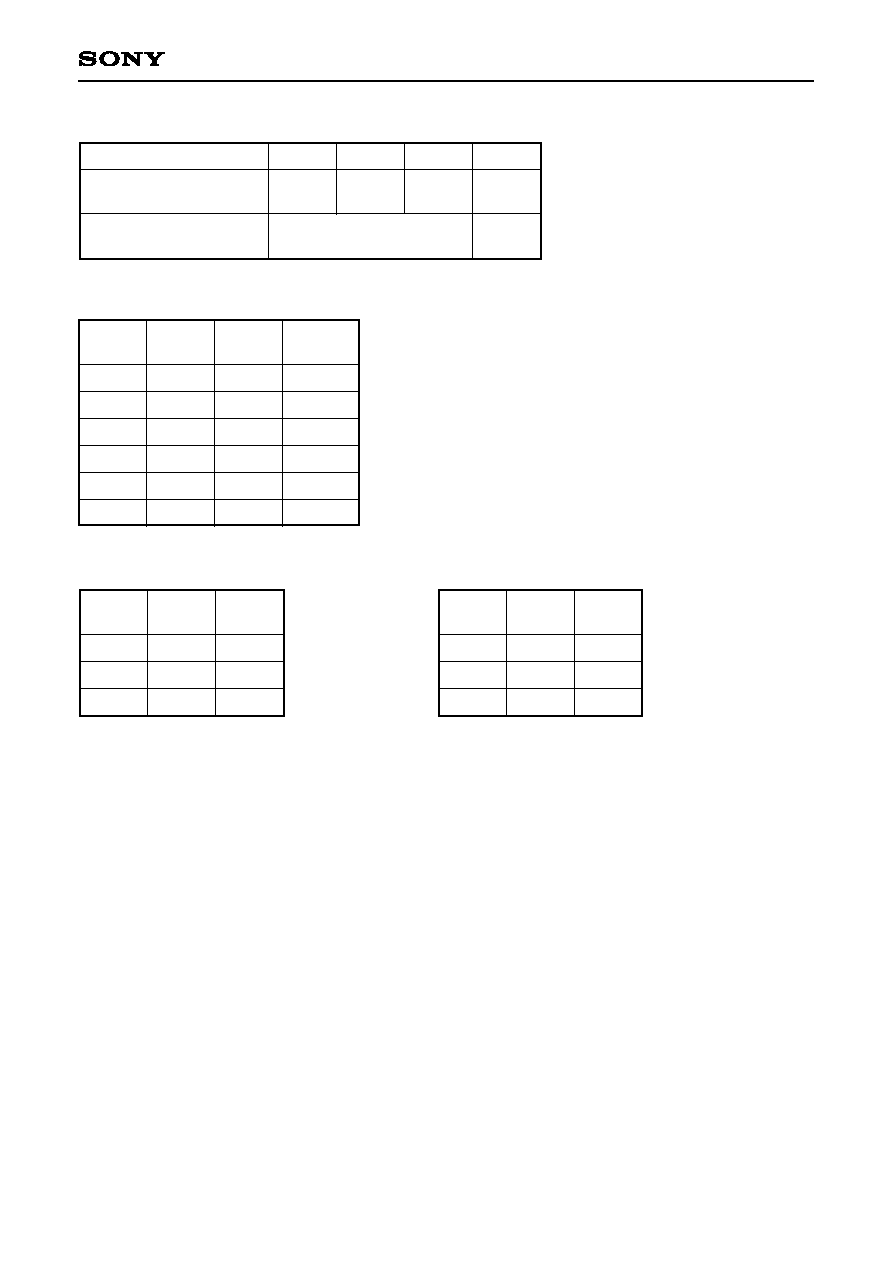
≠ 44 ≠
CXD2588Q/R
$CX commands
∑ CLV mode gain setting: GCLVS
∑ CLVP mode gain setting: GMDP: GMDS
Servo coefficient setting
CLV CTRL ($DX)
Gain
MDP1
Gain
MDP0
Gain
MDS1
Gain
MDS0
Gain
CLVS
Gain
MDS1
0
0
0
0
1
1
Gain
MDS0
0
0
1
1
0
0
Gain
CLVS
0
1
0
1
0
1
GCLVS
≠12dB
≠6dB
≠6dB
0dB
0dB
+6dB
Command
D3
D2
D1
D0
Gain
MDP1
0
0
1
Gain
MDP0
0
1
0
GMDP
≠6dB
0dB
+6dB
Gain
MDS1
0
0
1
Gain
MDS0
0
1
0
GMDS
≠6dB
0dB
+6dB
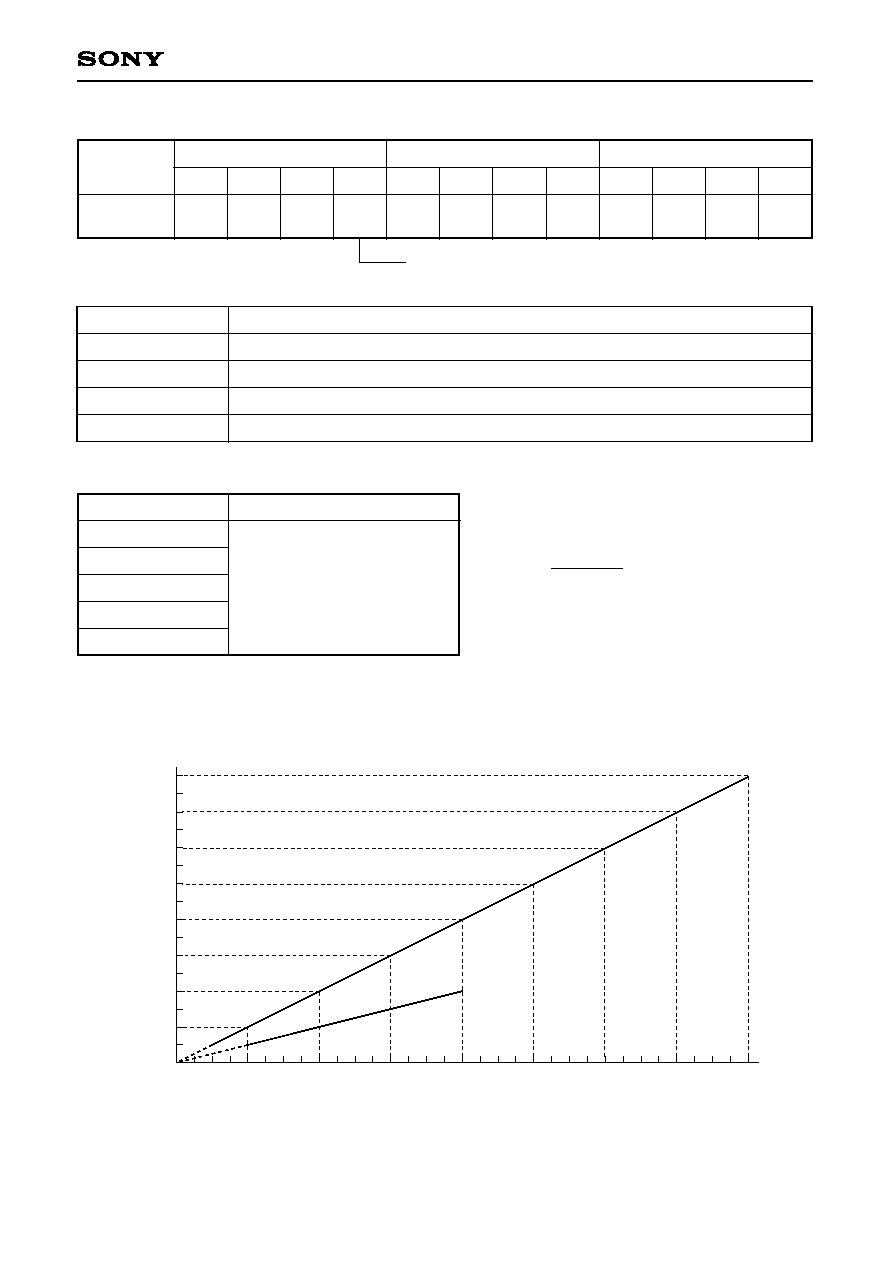
≠ 45 ≠
CXD2588Q/R
$DX commands
Command bit
Description
TB = 0
TB = 1
TP = 0
TP = 1
Bottom hold at a cycle of RFCK/32 in CLVS mode.
Bottom hold at a cycle of RFCK/16 in CLVS mode.
Peak hold at a cycle of RFCK/4 in CLVS mode.
Peak hold at a cycle of RFCK/2 in CLVS mode.
Command
D3
0
TB
TP
Gain
CLVS
VP7
VP6
VP5
VP4
VP3
VP2
VP1
VP0
D2
D1
D0
D3
D2
D1
D0
D3
D2
D1
D0
Data 1
Data 2
CLV CTRL
Data 3
See the $CX commands.
The rotational velocity R of the spindle can be
expressed with the following equation.
R =
32
256 ≠ n
R: Relative velocity at normal speed = 1
n: VP0 to 7 setting value
Note) ∑ Values in parentheses are for when DSPB is 1.
∑ Values when crystal is 16.9344MHz and XTSL is low or when crystal is 33.8688MHz and XTSL is high.
∑ VP0 to 7 setting values are valid in CAV-W mode.
2
R
≠
R
e
l
a
t
i
v
e
v
e
l
o
c
i
t
y
[
m
u
l
t
i
p
l
e
]
1.5
1
0.5
F0
E0
VP0 to 7 setting value [HEX]
DS
PB
=
1
DSP
B = 0
2.5
3
3.5
4
D0
C0
Fig. 1-1
Command bit
Description
VP0 to 7 = F0 (H)
:
VP0 to 7 = E0 (H)
:
VP0 to 7 = C0 (H)
Playback at half (normal) speed
to
Playback at normal (double)
speed
to
Playback at (quadruple) speed
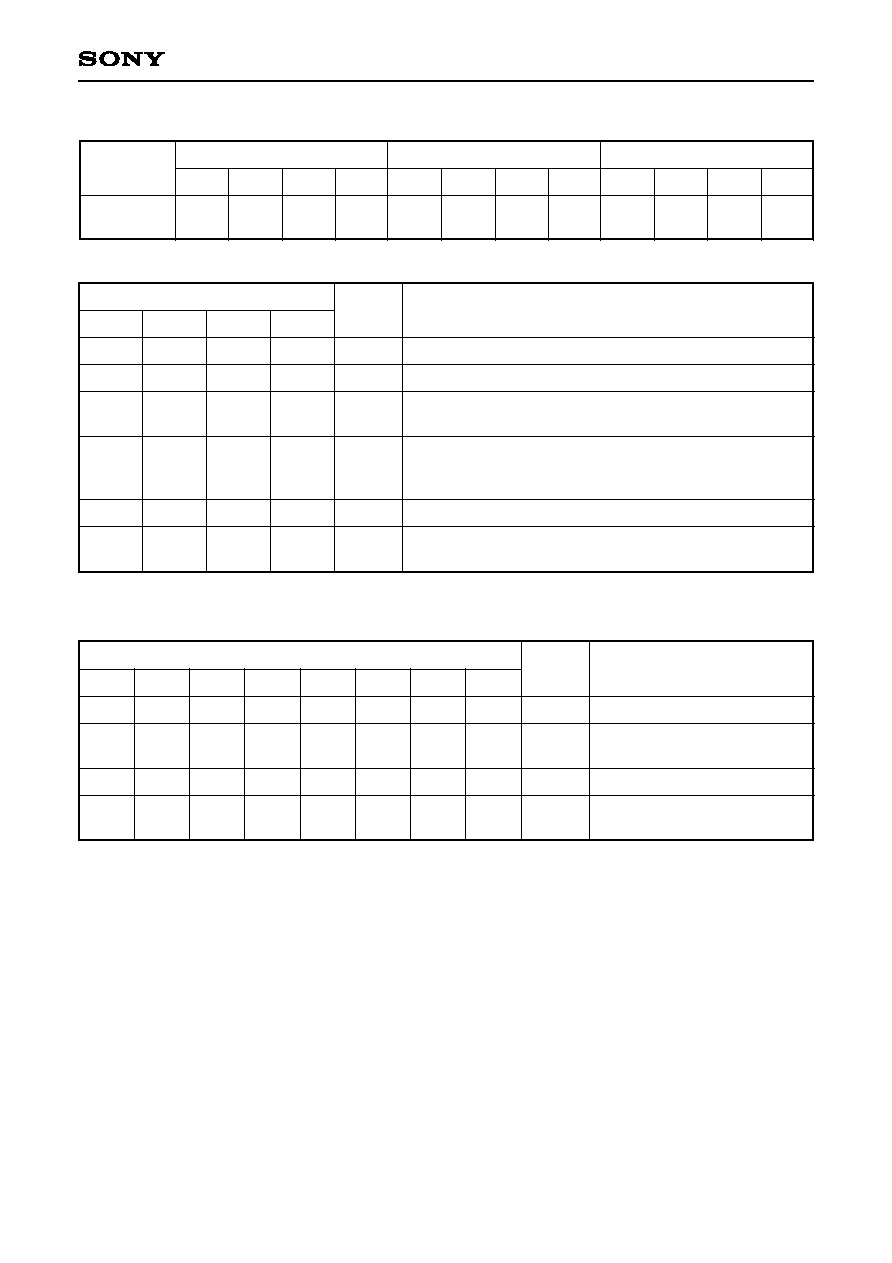
≠ 46 ≠
CXD2588Q/R
$EX commands
Command
Data 1
CLV mode
CM3
CM2
CM1
CM0
D3
D2
D1
D0
Data 2
EPWM SPDC
ICAP
SFSL
D3
D2
D1
D0
Data 3
VC2C
HIFC
LPWR VPON
D3
D2
D1
D0
Command bit
CM3
CM2
CM1
Description
Spindle stop mode.
1
Spindle forward rotation mode.
1
Spindle reverse rotation mode. Valid only when LPWR = 0
in any mode.
1
Rough servo mode. When the RF-PLL circuit isn't locked,
this mode is used to pull the disc rotations within the RF-
PLL capture range.
PLL servo mode.
Automatic CLVS/CLVP switching mode.
Used for normal playback.
0
1
1
1
1
0
0
0
0
1
1
1
0
0
1
1
1
1
CM0
0
0
0
0
1
0
Mode
STOP
KICK
BRAKE
CLVS
CLVP
CLVA
1
See Timing Charts 1-2 to 1-6.
Command bit
EPWM SPDC
ICAP
Description
Crystal reference CLV servo.
Used for normal-speed
playback in CLV-W mode.
2
Spindle control with VP0 to 7.
Spindle control with the external
PWM.
0
0
0
1
0
0
1
0
0
0
1
1
SFSL
0
0
0
0
VC2C
0
1
0
0
HIFC
0
1
1
1
LPWR
0
0
0
0
VPON
0
0
1
1
Mode
CLV-N
CLV-W
CAV-W
CAV-W
2
Figs. 3-1 and 3-2 show the control flow with the microcomputer software in CLV-W mode.
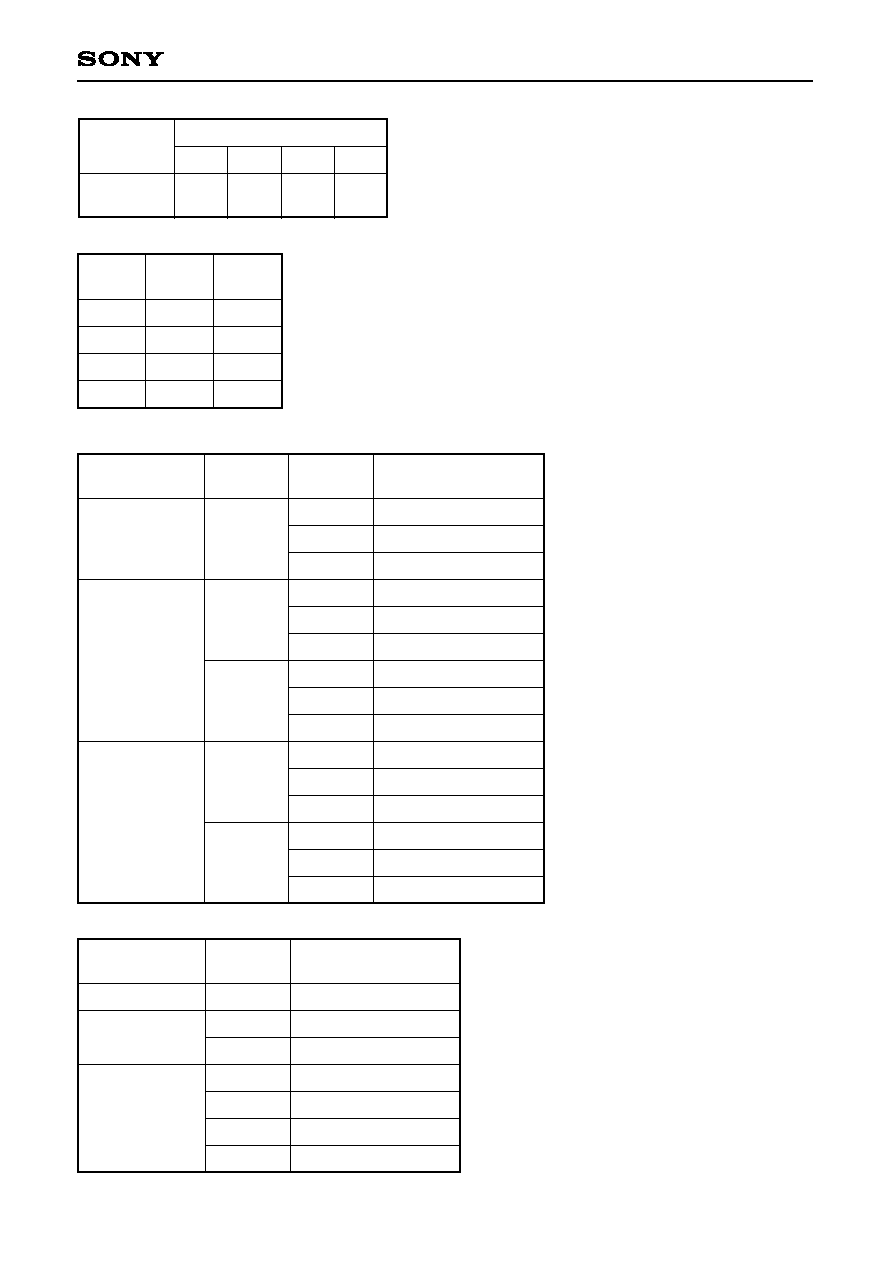
≠ 47 ≠
CXD2588Q/R
Command
Data 4
SPD mode
Gain
CAV1
Gain
CAV0
0
0
D3
D2
D1
D0
Gain
CAV1
0
0
1
1
Gain
CAV0
0
1
0
1
Gain
0dB
≠6dB
≠12dB
≠18dB
∑ This sets the gain when controlling the spindle with the phase comparator
in CAV-W mode.
Mode
CLV-N
CLV-W
CAV-W
LPWR
0
0
1
0
1
Command
KICK
BRAKE
STOP
KICK
BRAKE
STOP
KICK
BRAKE
STOP
KICK
BRAKE
STOP
KICK
BRAKE
STOP
1-2 (a)
1-2 (b)
1-2 (c)
1-3 (a)
1-3 (b)
1-3 (c)
1-4 (a)
1-4 (b)
1-4 (c)
1-5 (a)
1-5 (b)
1-5 (c)
1-6 (a)
1-6 (b)
1-6 (c)
Timing chart
Mode
CLV-N
CLV-W
CAV-W
LPWR
0
0
1
0
1
0
1
1-7
1-8
1-9
1-10 (EPWM = 0)
1-11 (EPWM = 0)
1-12 (EPWM = 1)
1-13 (EPWM = 1)
Timing chart
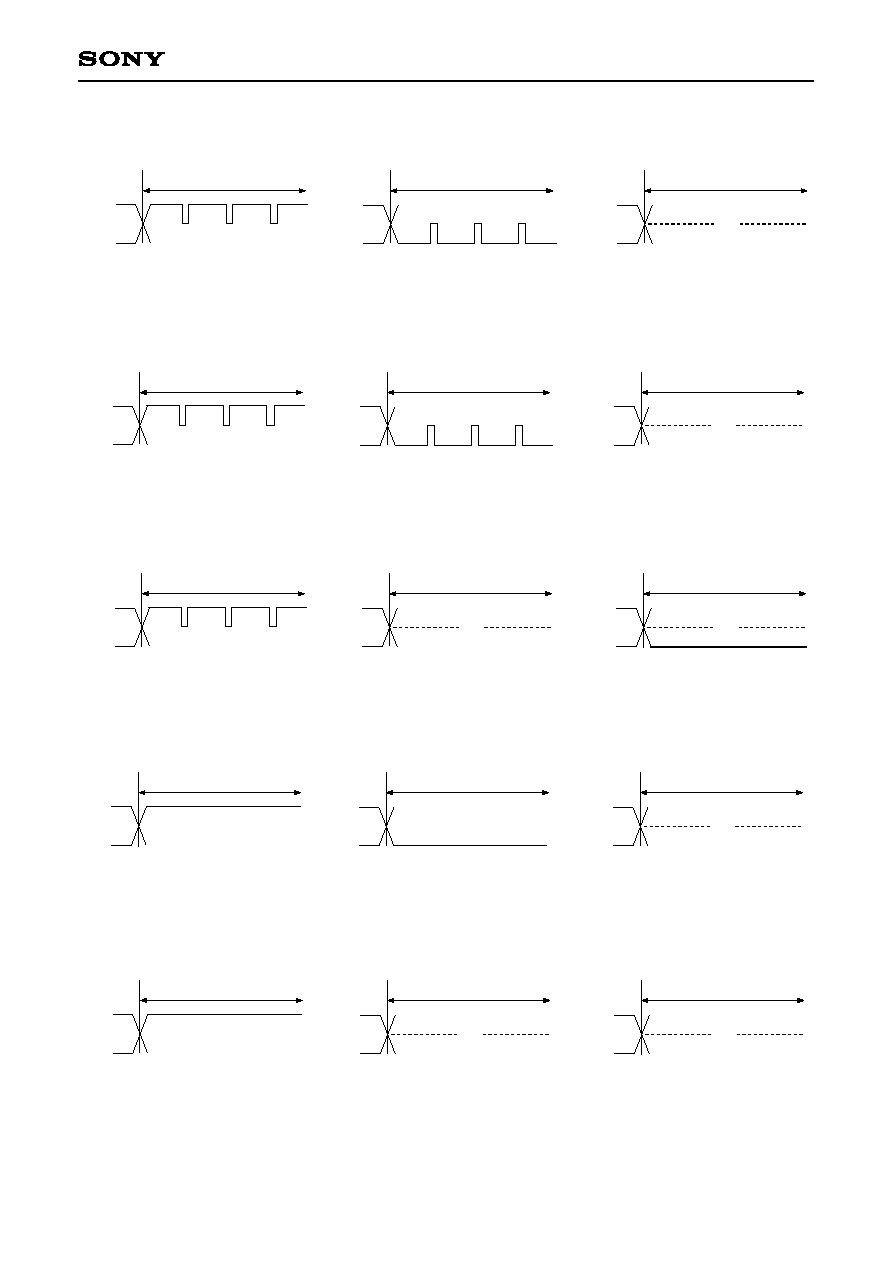
≠ 48 ≠
CXD2588Q/R
Timing Chart 1-2
CLV-N mode LPWR = 0
KICK
MDP
H
(a) KICK
BRAKE
MDP
(b) BRAKE
STOP
MDP
(c) STOP
Z
Z
L
Z
Timing Chart 1-3
CLV-W mode (when following the spindle rotational velocity) LPWR = 0
KICK
MDP
H
(a) KICK
BRAKE
MDP
(b) BRAKE
STOP
MDP
(c) STOP
Z
Z
L
Z
Timing Chart 1-4
CLV-W mode (when following the spindle rotational velocity) LPWR = 1
KICK
MDP
H
(a) KICK
BRAKE
MDP
(b) BRAKE
Z
STOP
MDP
(c) STOP
Z
Z
Timing Chart 1-5
CAV-W mode LPWR = 0
KICK
MDP
H
(a) KICK
BRAKE
MDP
(b) BRAKE
STOP
MDP
(c) STOP
Z
L
Timing Chart 1-6
CAV-W mode LPWR = 1
KICK
MDP
H
(a) KICK
BRAKE
MDP
(b) BRAKE
Z
STOP
MDP
(c) STOP
Z
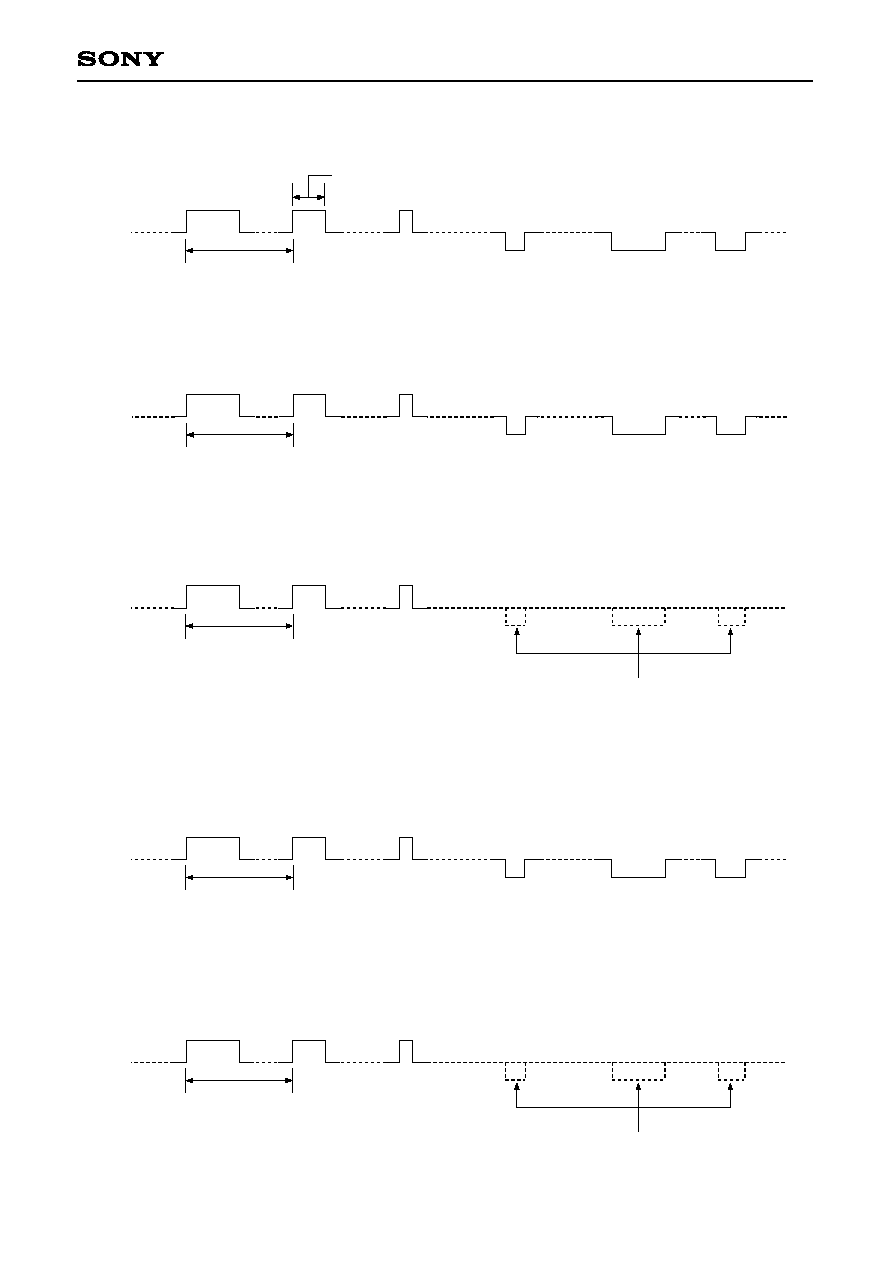
≠ 49 ≠
CXD2588Q/R
Timing Chart 1-10
CAV-W mode EPWM = LPWR = 0
MDP
Acceleration
Z
Deceleration
264kHz
3.8µs
Timing Chart 1-7
CLV-N mode LPWR = 0
MDP
Acceleration
Z
Deceleration
132kHz
7.6µs
n ∑ 236 (ns) n = 0 to 31
Timing Chart 1-8
CLV-W mode LPWR = 0
MDP
Acceleration
Z
Deceleration
264kHz
3.8µs
Timing Chart 1-9
CLV-W mode LPWR = 1
MDP
Acceleration
Z
264kHz
3.8µs
The BRAKE pulse is masked when LPWR = 1.
Timing Chart 1-11
CAV-W mode EPWM = LPWR = 1
MDP
Acceleration
Z
264kHz
3.8µs
The BRAKE pulse is masked when LPWR = 1.
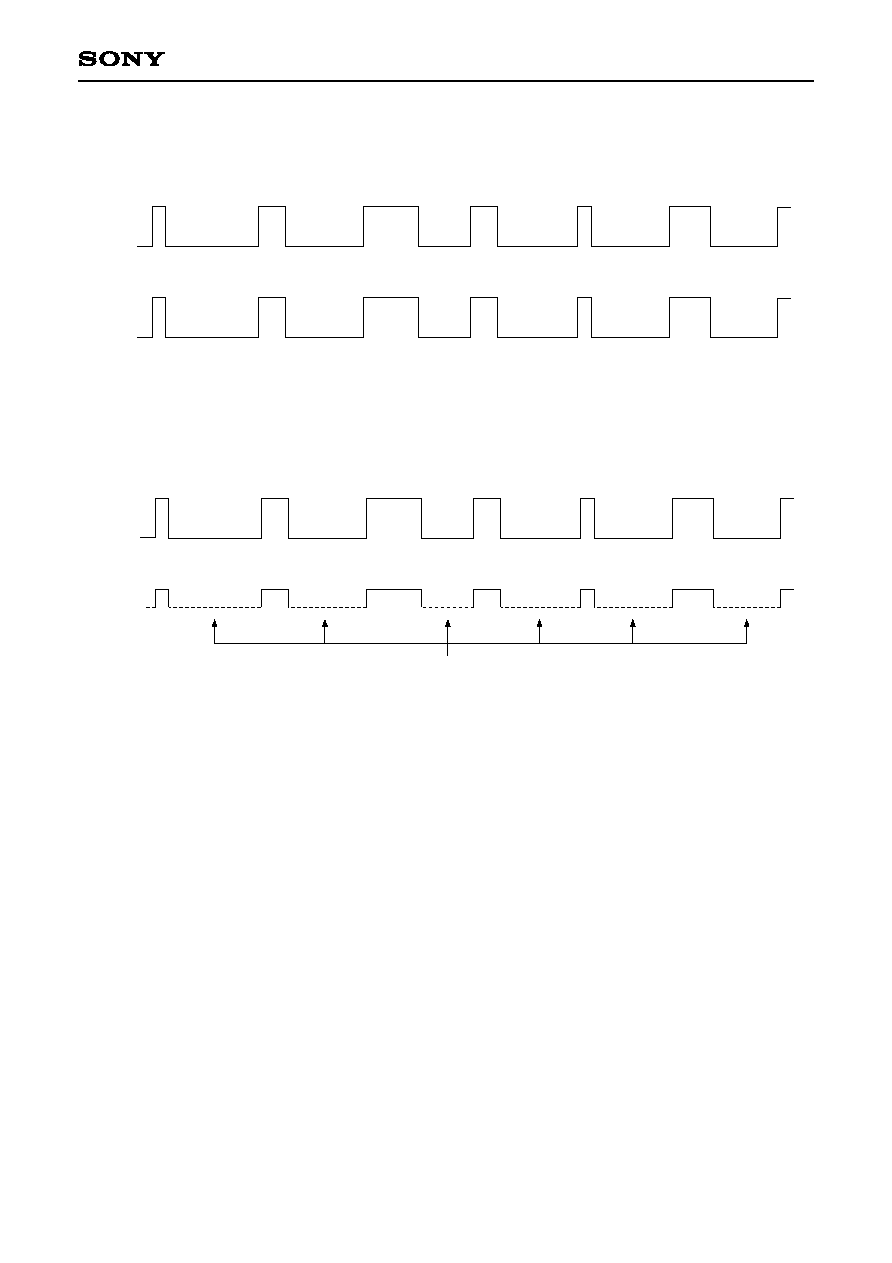
≠ 50 ≠
CXD2588Q/R
Timing Chart 1-12
CAV-W mode EPWM = 1, LPWR = 0
PWMI
MDP
H
L
H
L
Acceleration
Deceleration
Timing Chart 1-13
CAV-W mode EPWM = LPWR = 1
PWMI
MDP
H
L
H
Z
Acceleration
The BRAKE pulse is masked when LPWR = 1.

≠ 51 ≠
CXD2588Q/R
ß2. Subcode Interface
This section explains the subcode interface.
There are two methods for reading out a subcode externally.
The 8-bit subcodes P to W can be read from SBSO by inputting EXCK to the CXD2588Q/R.
Sub Q can be readout after checking the CRC of the 80 bits in the subcode frame.
Sub Q can be readout from the SQSO pin by inputting 80 clock pulses to the SQCK pin when SCOR comes
correctly and CRCF is high.
ß2-1. P to W Subcode Readout
Data can be readout by inputting EXCK immediately after WFCK falls. (See Timing Chart 2-1.)
ß2-2. 80-bit Sub Q Readout
Fig. 2-1 shows the peripheral block of the 80-bit Sub Q register.
∑ First, Sub Q, regenerated at one bit per frame, is input to the 80-bit serial/parallel register and the CRC check
circuit.
∑ 96-bit Sub Q is input, and if the CRC is OK, it is output to SQSO with CRCF = 1. In addition, 80 bits are
loaded into the parallel/serial register.
When SQSO goes high 400µs (monostable multivibrator time constant) or more after subcode readout, the
CPU determines that new data (which passed the CRC check) has been loaded.
∑ The CRCF reset is performed by inputting SQCK. When the subcode data is discontinuous after track jump,
etc. CRCF is reset by inputting SQCK. Then, if CRCF =1, the CPU determines that the new data has been
loaded.
∑ When the 80-bit data is loaded, the order of the MSB and LSB is inverted within each byte. As a result,
although the sequence of bytes is the same, the bits within the bytes are now ordered LSB first.
∑ Once the 80-bit data load is confirmed, SQCK is input so that the data can be read.
The SQCK input is detected, and the retriggerable monostable multivibrator is reset while the input is low.
∑ The retriggerable monostable multivibrator has a time constant from 270µs to 400µs. When the duration
when SQCK is high is less than this time constant, the monostable multivibrator is kept reset; during this
interval, the serial/parallel register is not loaded into the parallel/serial register.
∑ While the monostable multivibrator is being reset, data cannot be loaded in the 80-bit parallel/serial register.
In other words, while reading out with a clock cycle shorter than this time constant, the register will not be
rewritten by CRCOK and others. (See Timing Chart 2-2.)
∑ The high and low intervals for SQCK should be between 750ns and 120µs.
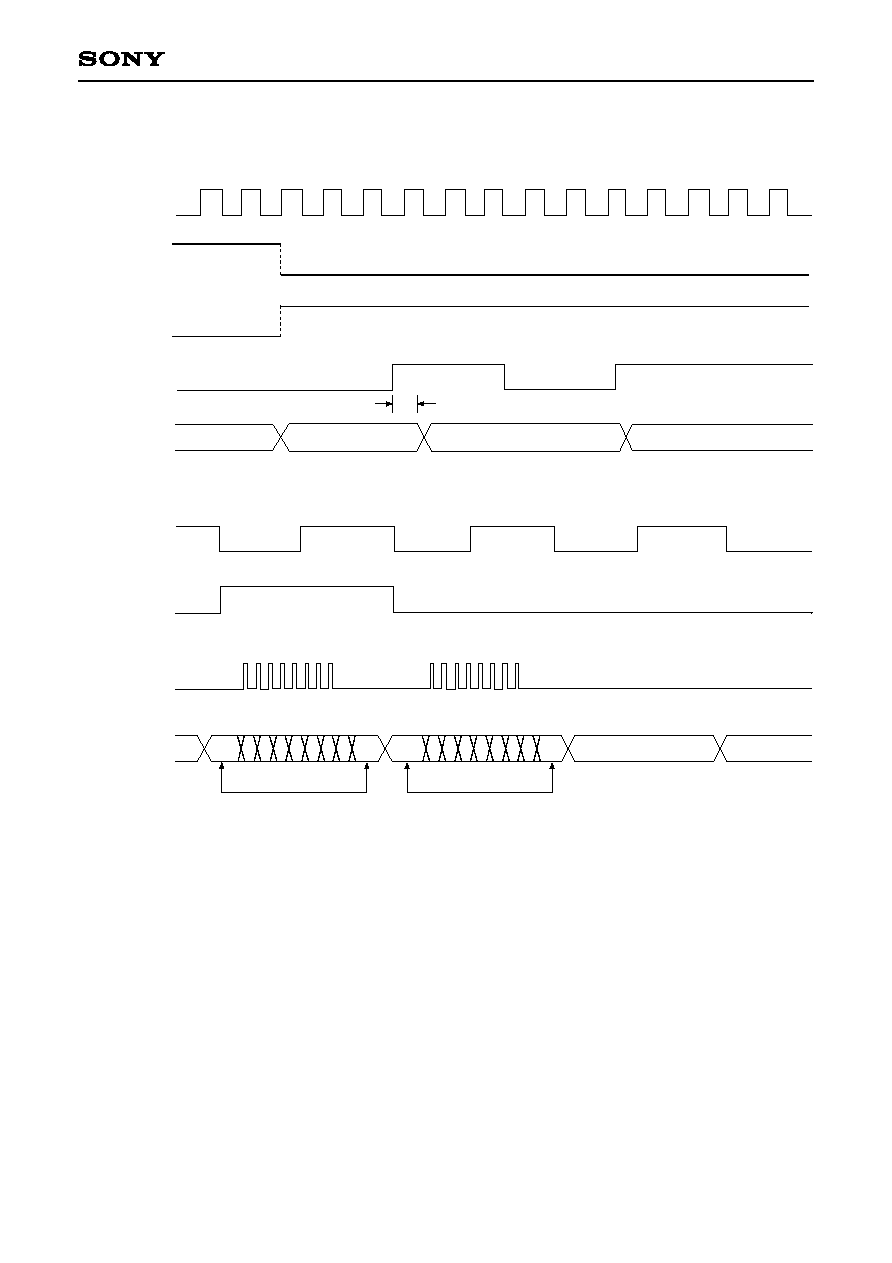
≠ 52 ≠
CXD2588Q/R
Timing Chart 2-1
Internal
PLL clock
4.3218 ±
MHz
WFCK
SCOR
EXCK
SBSO
400ns max
S0 ∑ S1
Q
R
WFCK
SCOR
EXCK
SBSO
S0∑S1 Q R S T U V W
S0∑S1
P1
Q R S T U V W
P1
P2
P3
Same
Same
Sub Code P.Q.R.S.T.U.V.W Read Timing
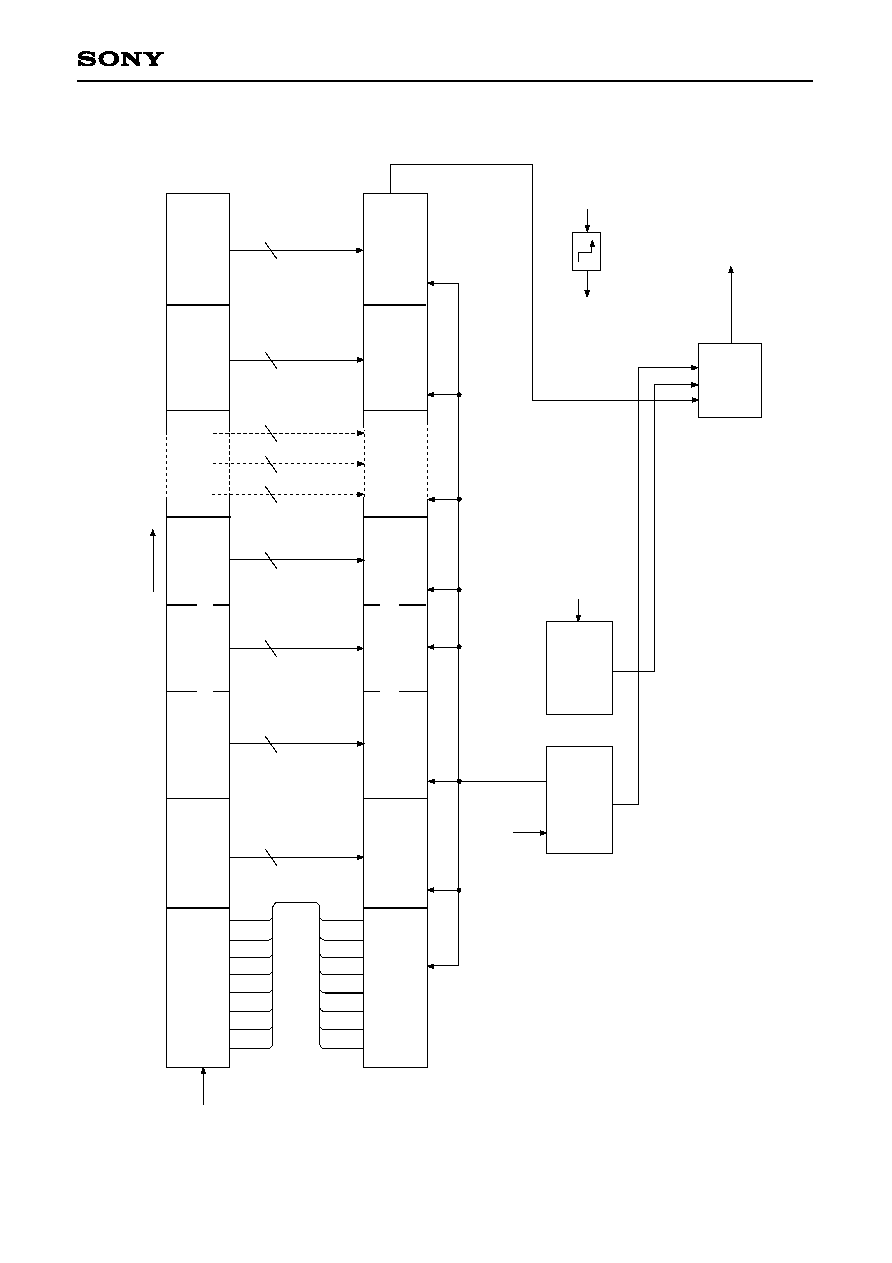
≠ 53 ≠
CXD2588Q/R
Fig. 2-1. Block Diagram
S
U
B
Q
S
I
N
A
B
C
D
E
F
G
H
(
A
F
R
A
M
)
H
G
F
E
D
C
B
A
(
A
S
E
C
)
(
A
M
I
N
)
8
0
-
b
i
t
S
/
P
R
e
g
i
s
t
e
r
A
D
D
R
S
C
T
R
L
8
8
8
O
r
d
e
r
I
n
v
e
r
s
i
o
n
8
8
8
8
8
8
S
I
LD
LD
LD
LD
LD
LD
LD
LD
8
0
-
b
i
t
P
/
S
R
e
g
i
s
t
e
r
S
O
S
H
I
F
T
S
Q
C
K
C
R
C
F
M
i
x
S
Q
S
O
M
o
n
o
/
M
u
l
t
i
C
R
C
C
S
U
B
Q
S
H
I
F
T
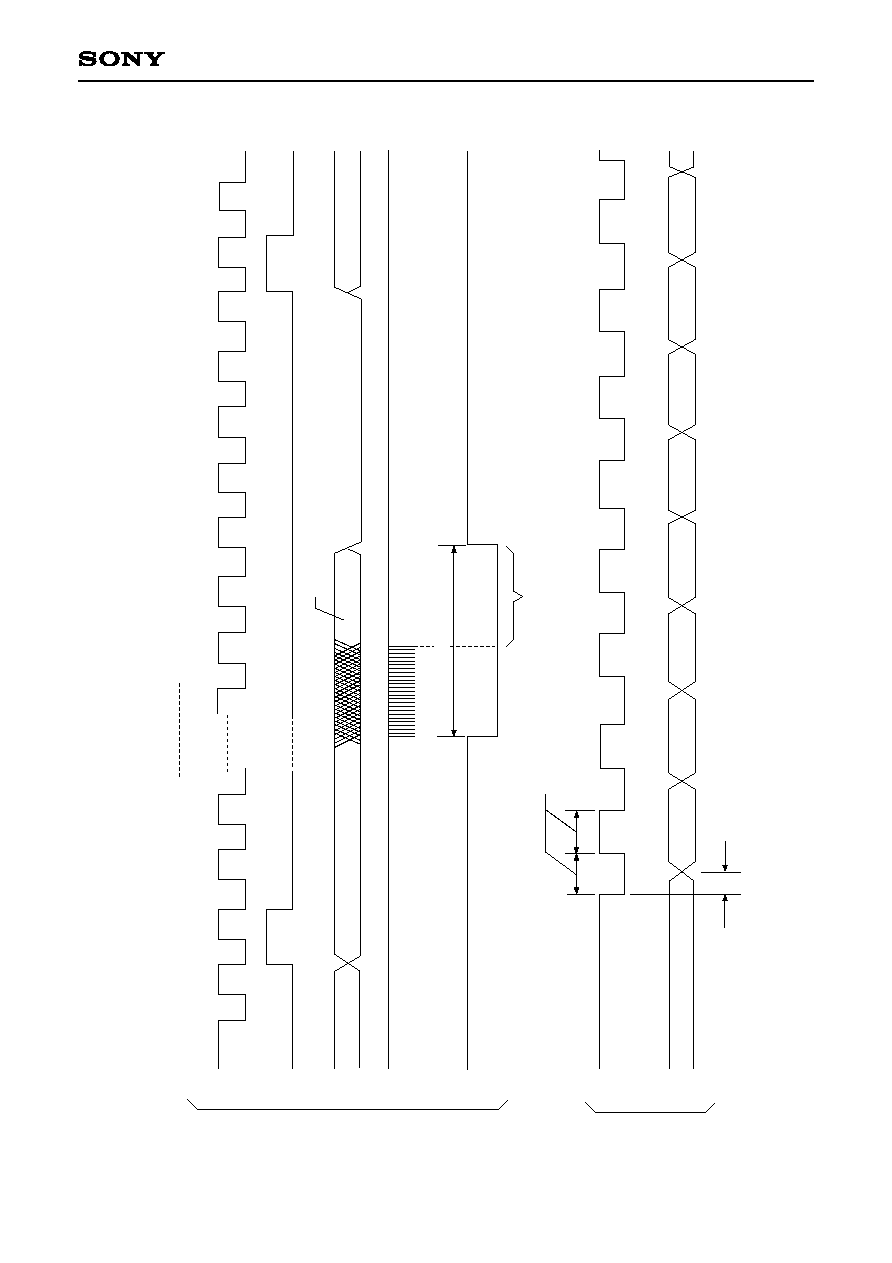
≠ 54 ≠
CXD2588Q/R
Timing Chart 2-2
1
2
3
9
1
9
2
9
3
9
4
9
5
9
6
9
7
9
8
W
F
C
K
S
C
O
R
S
Q
S
O
S
Q
C
K
M
o
n
o
/
m
u
l
t
i
(
I
n
t
e
r
n
a
l
)
O
r
d
e
r
I
n
v
e
r
s
i
o
n
C
R
C
F
1
D
e
t
e
r
m
i
n
e
d
b
y
m
o
d
e
L
C
R
C
F
2
8
0
c
l
o
c
k
s
R
e
g
i
s
t
e
r
e
l
o
a
d
f
o
r
b
i
d
d
e
r
2
7
0
µ
s
t
o
4
0
0
µ
s
f
o
r
S
Q
C
K
=
H
i
g
h
7
5
0
n
s
t
o
1
2
0
µ
s
3
0
0
n
s
m
a
x
C
R
C
F
A
D
R
0
A
D
R
1
A
D
R
2
A
D
R
3
C
T
L
0
C
T
L
1
C
T
L
2
C
T
L
3
S
Q
C
K
S
Q
S
O
1
2
3
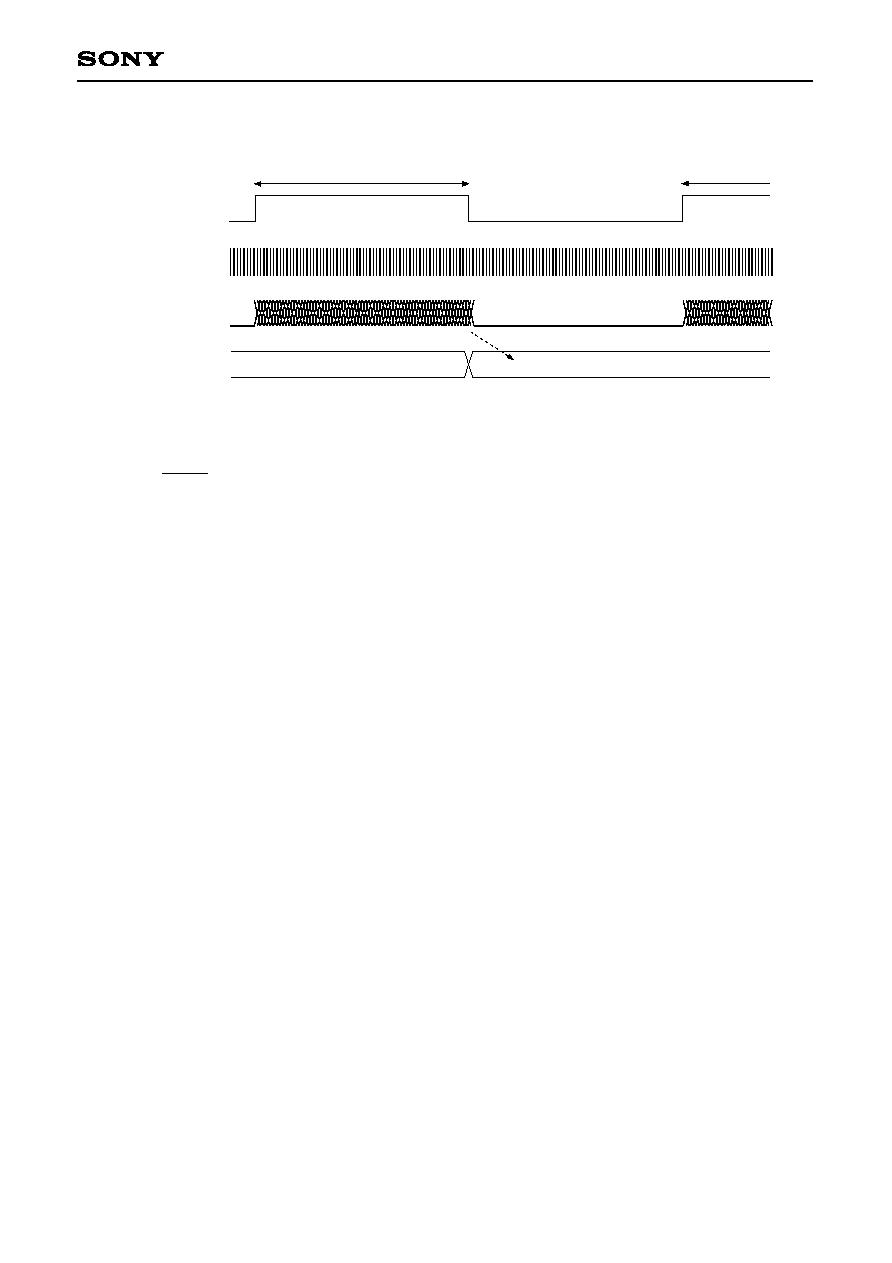
≠ 55 ≠
CXD2588Q/R
Timing Chart 2-3
Measurement interval (approximately 3.8µs)
Reference window
(132.2kHz)
Measurement pulse
(VCKI/2)
Measurement counter
VF0 to 7
Load
m
The relative velocity R of the disc can be expressed with the following equation.
R = (R: Relative velocity, m: Measurement results)
VF0 to 7 is the result obtained by counting VCKI/2 pulses while the reference signal (132.2kHz) generated
from the crystal (384Fs) is high. This count is 31 when the disc is rotating at normal speed and 63 when it is
rotating at double speed (when DSPB is low).
m + 1
32

≠ 56 ≠
CXD2588Q/R
ß3. Description of Modes
This LSI has three basic operating modes using a combination of spindle control and the PLL. The operations
for each mode are described below.
ß3-1. CLV-N Mode
This mode is compatible with the CXD2507AQ, and operation is the same as for the conventional control. The
PLL capture range is ±150kHz.
ß3-2. CLV-W Mode
This is the wide capture range mode. This mode allows the PLL to follow the rotational velocity of the disc. This
rotational following control has two types: using the built-in VCO2 or providing an external VCO. The spindle is
the same CLV servo as for the conventional series. Operation using the built-in VCO2 is described below.
(When using an external VCO, input the signal from the VPCO pin to the low-pass filter, use the output from
the low-pass filter as the control voltage for the external VCO, and input the oscillation output from the VCO to
the VCKI pin.)
When starting to rotate the disc and/or speeding up to the lock range from the condition where the disc is
stopped, CAV-W mode should be used. Specifically, first send $E6650 to set CAV-W mode and kick the disc,
then send $E60C0 to set CLV-W mode if ALOCK is high, which can be readout serially from the SQSO pin.
CLV mode can be used while ALOCK is high. The microcomputer monitors the serial data output, and must
return the operation to the speed adjusting state (CAV-W mode) when ALOCK becomes low. The control flow
according to the microcomputer software is shown in Fig. 3-2.
In CLV-W mode (normal), low power consumption is achieved by setting LPWR to high. Control was formerly
performed by applying acceleration and deceleration pulses to the spindle motor. However, when LPWR is set
to high, deceleration pulses are not output, thereby achieving low power consumption mode.
Note) The capture range for CLV-W mode has theoretically the range up to the signal processing limit.
ß3-3. CAV-W Mode
This is CAV mode. In this mode, the external clock is fixed and it is possible to control the spindle to variable
rotational velocity. The rotational velocity is determined by the VP0 to 7 setting values or the external PWM.
When controlling the spindle with VP0 to 7, setting CAV-W mode with the $E6650 command and controlling
VP0 to 7 with the $DX commands allows the rotational velocity to be varied from low speed to double speed.
(See the $DX commands.) Also, when controlling the spindle with the external PWM, the PWMI pin is binary
input which becomes KICK during high intervals and BRAKE during low intervals.
The microcomputer can know the rotational velocity using V16M. The reference for the velocity measurement
is a signal of 132.2kHz obtained by 1/128-frequency dividing the crystal (384Fs). The velocity is obtained by
counting V16M/2 pulses while the reference is high, and the result is output from the new CPU interface as
8 bits (VF0 to 7). These measurement results are 31 when the disc is rotating at normal speed or 63 when it is
rotating at double speed. These values match those of the 256-n for control with VP0 to 7.
In CAV-W mode, the spindle is set to the desired rotational velocity and the operation speed for the entire
system follows this rotational velocity. Therefore, the cycles for the Fs system clock, PCM data and all other
output signals from this LSI change according to the rotational velocity of the disc.
Note) The capture range for this mode is theoretically up to the signal processing limit.
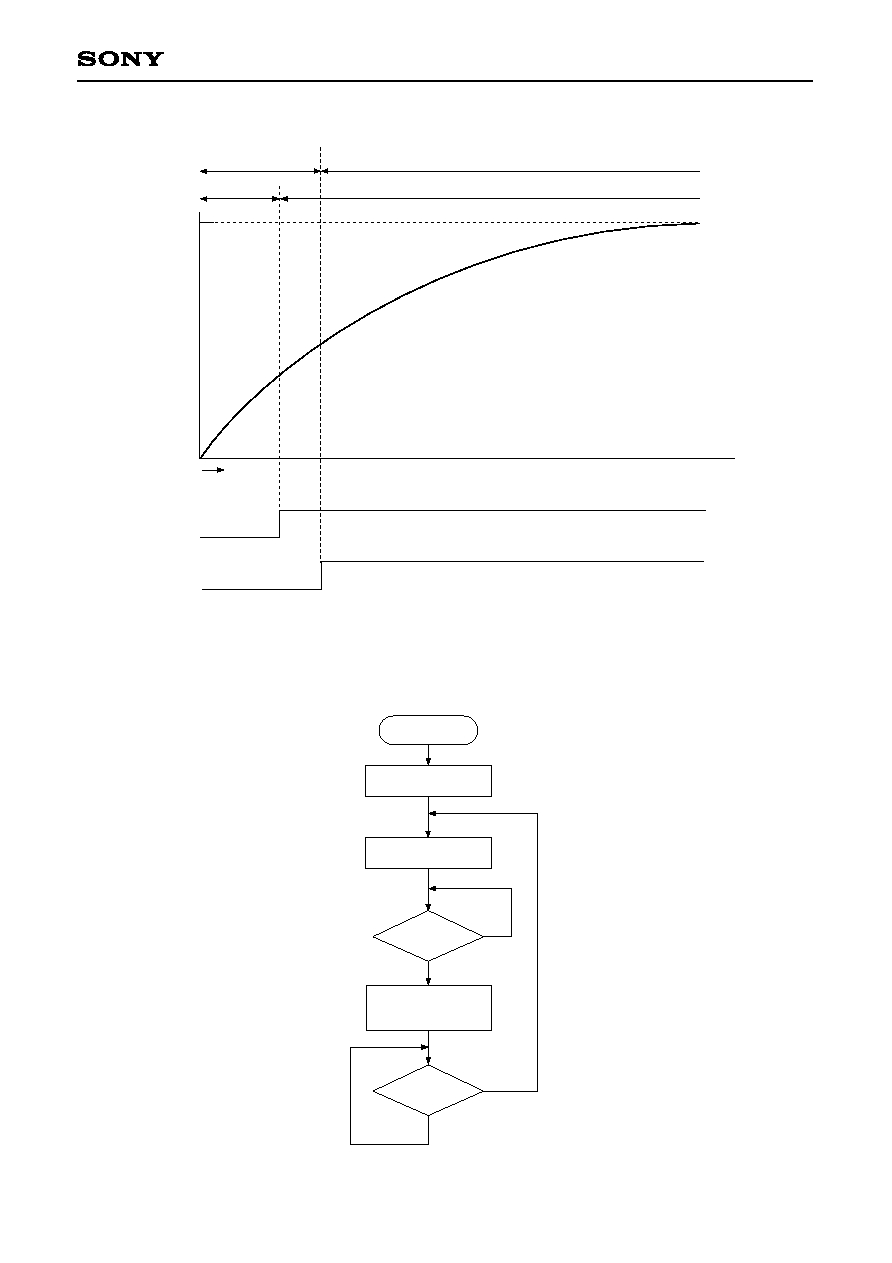
≠ 57 ≠
CXD2588Q/R
CAV-W
CLVS
CLV-W
CLVP
Rotational velocity
Target velocity
Operation mode
Spindle mode
Time
KICK
LOCK
ALOCK
Fig. 3-1. Disc Stop to Normal Condition in CLV-W Mode
CLV-W Mode
NO
YES
KICK $E8000
Mute OFF $A0XXXXX
ALOCK = H ?
NO
YES
ALOCK = L ?
CLV-W MODE
START
CAV-W $E6650
(CLVA)
CLV-W $E60C0
(CLVA)
(WFCK PLL)
Fig. 3-2. CLV-W Mode Flow Chart

≠ 58 ≠
CXD2588Q/R
ß4. Description of Other Functions
ß4-1. Channel Clock Regeneration by the Digital PLL Circuit
∑ The channel clock is necessary for demodulating the EFM signal regenerated by the optical system.
Assuming T as the channel clock cycle, the EFM signal is modulated in an integer multiple of T from 3T to
11T. In order to read the information in the EFM signal, this integer value must be read correctly. As a result,
T, that is the channel clock, is necessary.
In an actual player, the PLL is necessary to regenerate the channel clock because the fluctuation in the
spindle rotation alters the width of the EFM signal pulses.
The block diagram of this PLL is shown in Fig. 4-1.
The CXD2588Q/R has a built-in three-stage PLL.
∑ The first-stage PLL is for the wide-band PLL. When the internal VCO2 is used, an external LPF is necessary;
when not using the internal VCO2, external LPF and VCO are required.
The output of this first-stage PLL is used as a reference for all clocks within the LSI.
∑ The second-stage PLL generates the high-frequency clock needed by the third-stage digital PLL.
∑ The third-stage PLL is a digital PLL that regenerates the actual channel clock.
∑ A new digital PLL has been provided for CLV-W mode to follow the rotational velocity of the disc in addition
to the conventional secondary loop.
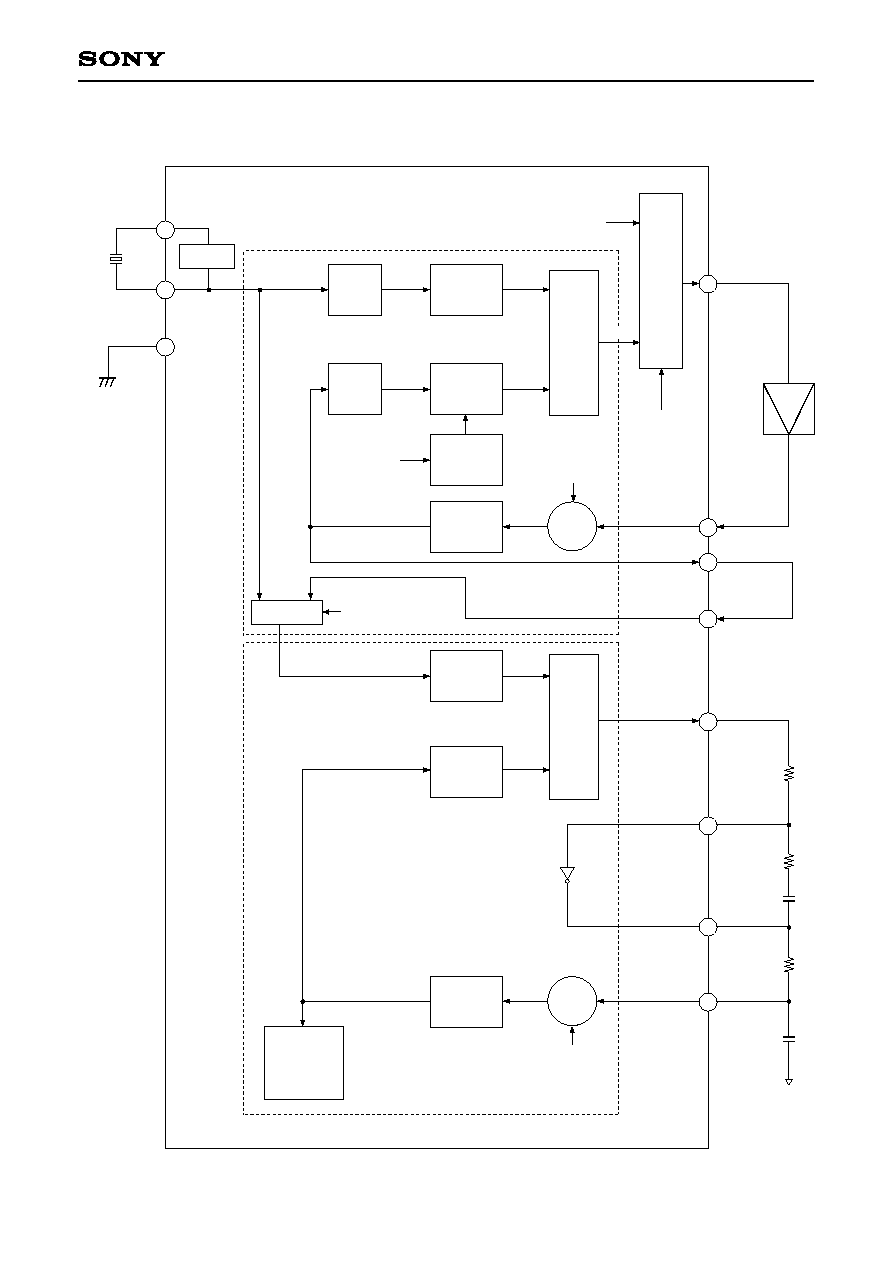
≠ 59 ≠
CXD2588Q/R
Block Diagram 4-1
X'tal
XTSL
OSC
1/2
1/32
1/n
1/2
Microcomputer
control
n = 1 to 256
(VP7 to 0)
1/K
(KSL1, 0)
CLV-W
CAV-W
Spindle rotation information
CLV-N
CLV-W
CAV-W
/CLV-N
P
h
a
s
e
c
o
m
p
a
r
a
t
o
r
S
e
l
e
c
t
o
r
LPF
2/1 MUX
VPON
1/M
1/N
VCOSEL2
VCO2
P
h
a
s
e
c
o
m
p
a
r
a
t
o
r
VCO1
VCOSEL1
1/K
(KSL3, 2)
Digital PLL
RFPLL
VPCO
VCTL
V16M
VCKI
PCO
FILI
FILO
CLTV
CXD2588Q/R
≠ 60 ≠
CXD2588Q/R
ß4-2. Frame Sync Protection
∑ In normal-speed playback, a frame sync is recorded approximately every 136µs (7.35kHz). This signal is
used as a reference to recognize the data within a frame. Conversely, if the frame sync cannot be
recognized, the data is processed as error data because the data cannot be recognized. As a result,
recognizing the frame sync properly is extremely important for improving playability.
∑ In the CXD2588Q/R, window protection and forward protection/backward protection have been adopted for
frame sync protection. These functions achieve very powerful frame sync protection. There are two window
widths: one for cases where a rotational disturbance affects the player and the other for cases where there is
no rotational disturbance (WSEL = 0/1). In addition, the forward protection counter is fixed to 13, and the
backward protection counter to 3. Concretely, when the frame sync is being played back normally and then
cannot be detected due to scratches etc., a maximum of 13 frames are inserted. If the frame sync cannot be
detected for 13 frames or more, the window opens to resynchronize the frame sync.
In addition, immediately after the window opens and the resynchronization is executed, if a proper frame
sync cannot be detected within 3 frames, the window opens immediately.
ß4-3. Error Correction
∑ In the CD format, one 8-bit data contains two error correction codes, C1 and C2. For C1 correction, the code
is created with 28-byte information and 4-byte C1 parity.
For C2 correction, the code is created with 24-byte information and 4-byte parity.
Both C1 and C2 are Reed-Solomon codes with a minimum distance of 5.
∑ The CXD2588Q/R's SEC strategy uses powerful frame sync protection and C1 and C2 error correction to
achieve high playability.
∑ The correction status can be monitored externally.
See Table 4-2.
∑ When the C2 pointer is high, the data in question was uncorrectable. Either the pre-value was held or an
average value interpolation was made for the data.
MNT3
0
0
0
1
1
1
MNT1
0
0
1
0
0
1
MNT0
0
1
1
0
1
0
Description
No C1 errors
One C1 error corrected
C1 correction impossible
No C2 errors
One C2 error corrected
C2 correction impossible
Table 4-2.
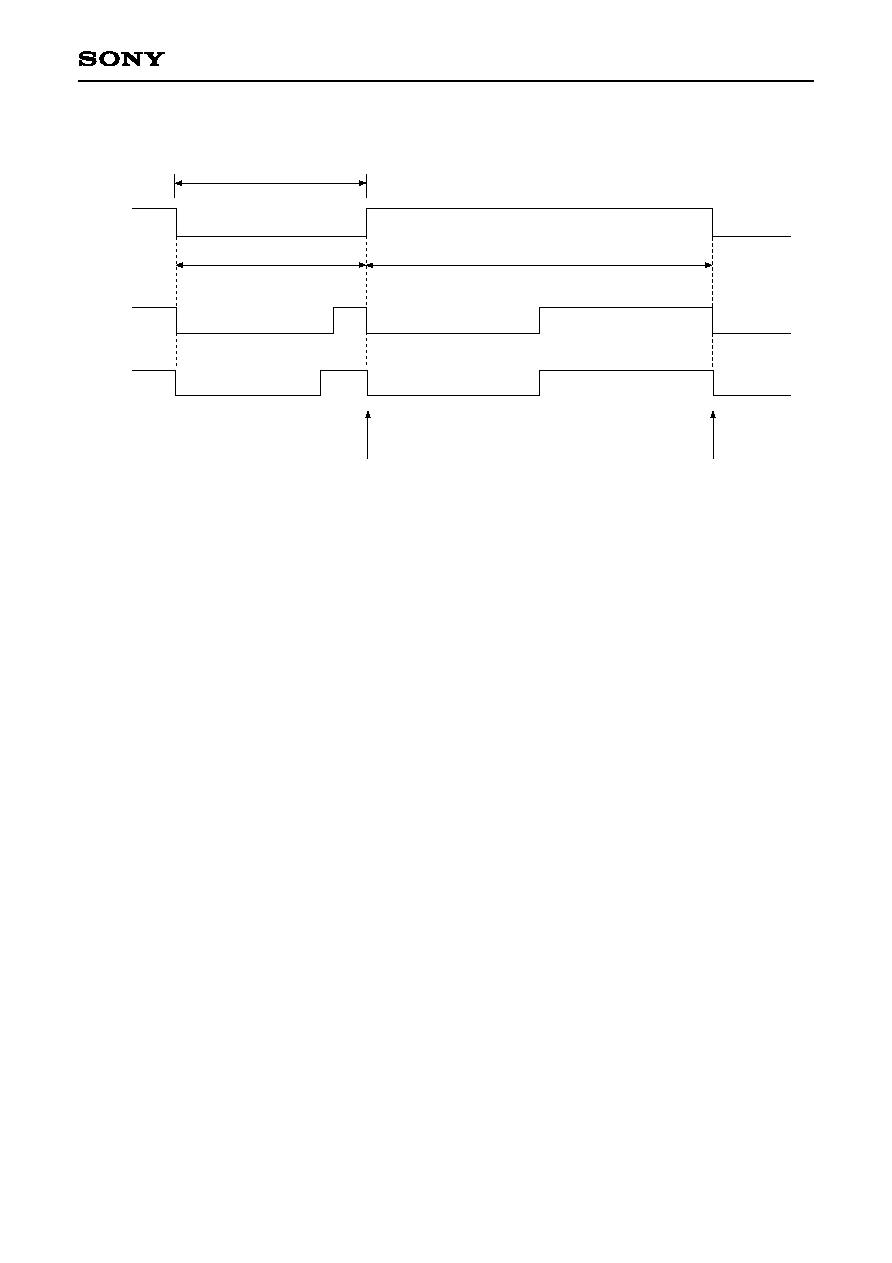
≠ 61 ≠
CXD2588Q/R
Timing Chart 4-3
Normal-speed PB
MNT3
MNT1
MNT0
t = Dependent on error
condition
C1 correction
C2 correction
Strobe
Strobe
ß4-4. DA Interface
∑ The CXD2588Q/R DA interface is as described below.
This interface includes 48 cycles of the bit clock within one LRCK cycle, and is MSB first. When LRCK is
high, the data is for the left channel.
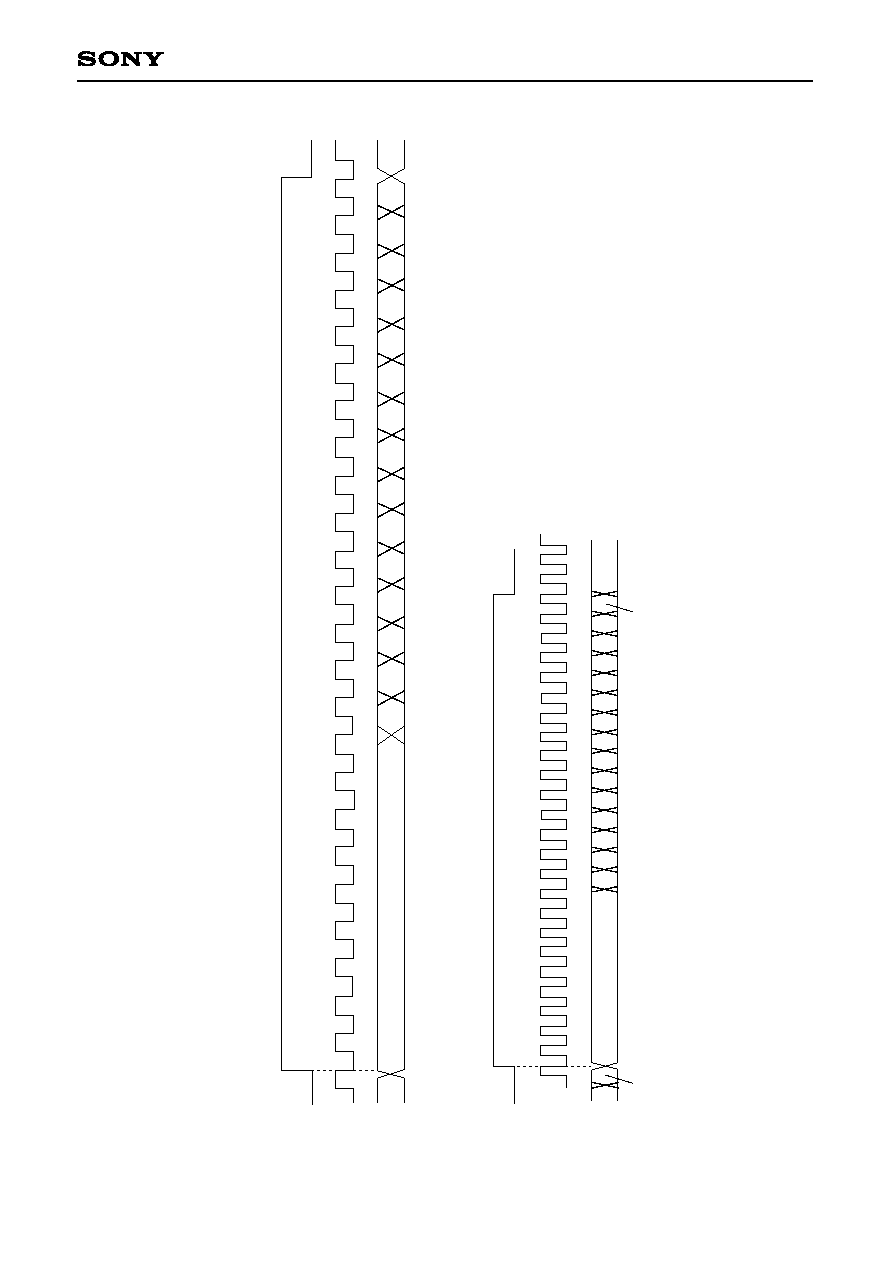
≠ 62 ≠
CXD2588Q/R
Timing Chart 4-4
L
R
C
K
(
4
4
.
1
k
)
B
C
K
(
2
.
1
2
M
)
L
R
C
K
(
8
8
.
2
k
)
B
C
K
(
4
.
2
3
M
)
P
C
M
D
4
8
-
b
i
t
s
l
o
t
N
o
r
m
a
l
-
S
p
e
e
d
P
l
a
y
b
a
c
k
1
2
4
P
C
M
D
R
0
L
c
h
M
S
B
(
1
5
)
L
1
4
L
1
3
L
1
2
L
1
1
L
1
0
L
9
L
8
L
7
L
6
L
5
L
4
L
3
L
2
L
1
L
0
R
M
S
B
R
0
L
c
h
M
S
B
(
1
5
)
2
4
R
c
h
M
S
B
2
3
4
5
6
7
8
9
1
0
1
1
1
2
4
8
-
b
i
t
s
l
o
t
D
o
u
b
l
e
-
S
p
e
e
d
P
l
a
y
b
a
c
k
1
2
L
0
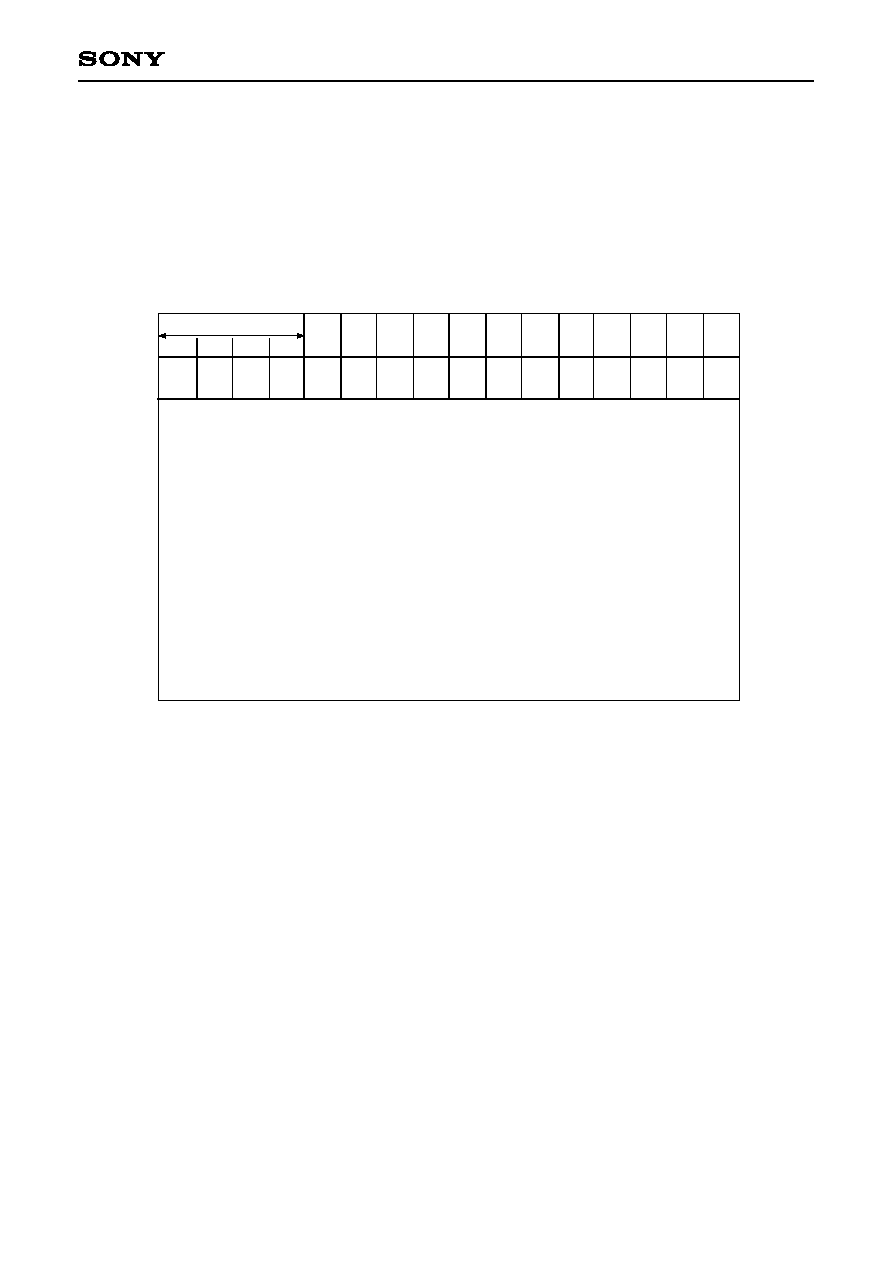
≠ 63 ≠
CXD2588Q/R
ß4-5. Digital Out
There are three Digital Out: the type 1 format for broadcasting stations, the type 2 form 1 format for home use,
and the type 2 form 2 format for the manufacture of software.
The CXD2588Q/R supports type 2 form 1.
Sub Q data which are matched twice in succession after a CRC check are input to the first four bits (bits 0 to 3)
of the channel status.
Table 4-5.
ß4-6. Servo Auto Sequence
This function performs a series of controls, including auto focus and track jumps. When the auto sequence
command is received from the CPU, auto focus, 1-track jump, 2N-track jump and N-track move are executed
automatically.
The commands which enable transfer to the CXD2588Q/R during the execution of auto sequence are $4X to
$EX.
When CLOK goes from low to high while XBUSY is low, XBUSY does not become high for a maximum of
100µs after that point.
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0/1
0
0
0
ID0
ID1 COPY Emph
0
0
0
0
1
0
0
0
0
0
0
0
From sub Q
0
16
32
48
176
Bits 0 to 3 Sub Q control bits that matched twice with CRCOK
Bit 29
1 when VPON = 1
Digital Out C bit
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
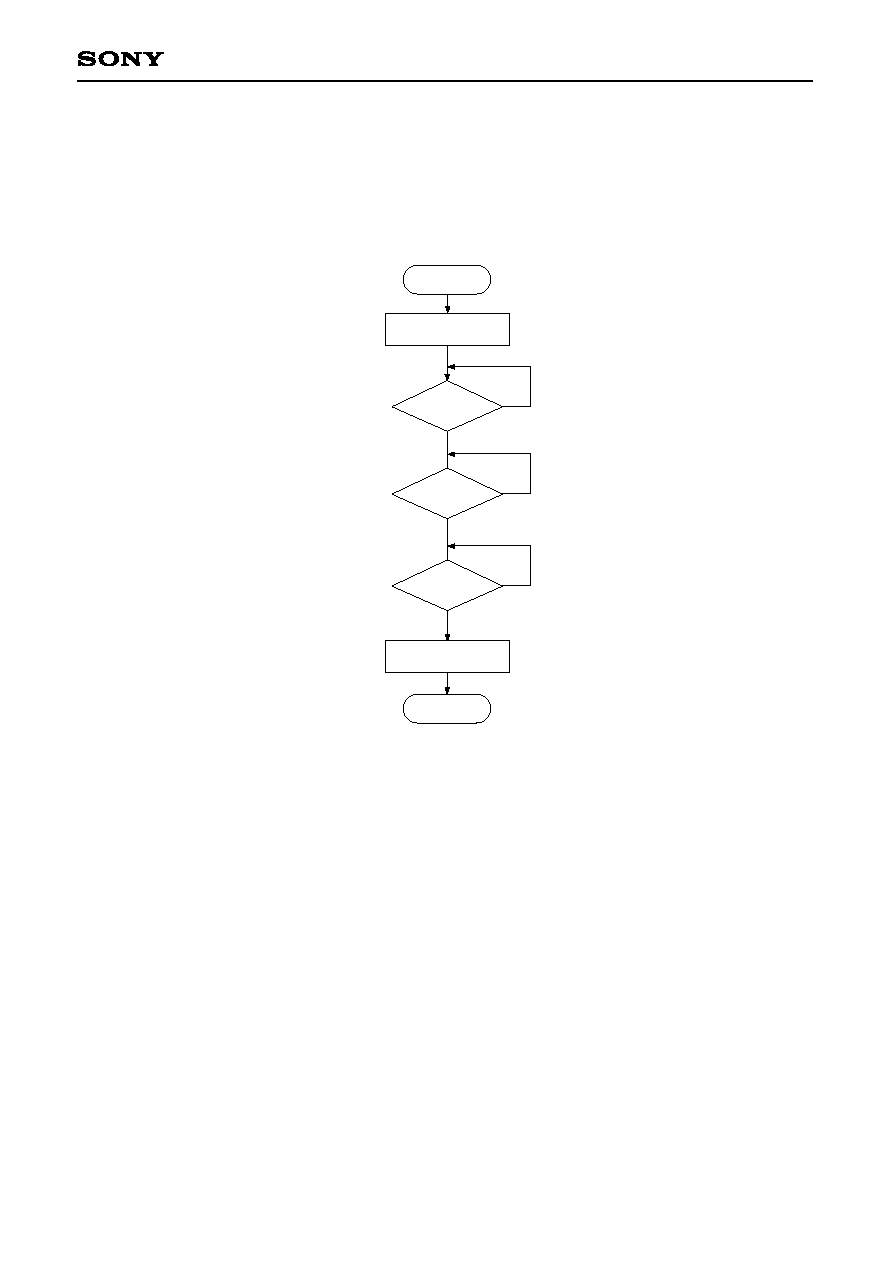
≠ 64 ≠
CXD2588Q/R
(a) Auto focus ($47)
Focus search-up is performed, FOK and FZC are checked, and the focus servo is turned on.
If $47 is received from the CPU, the focus servo is turned on according to Fig. 4-3. The auto focus starts with
focus search-up, and note that the pickup should be lowered beforehand (focus search down). In addition,
blind E of register 5 is used to eliminate FZC chattering. Concretely, the focus servo is turned on at the falling
edge of FZC after FZC has been continuously high for a longer time than E.
Fig. 4-6-(a). Auto Focus Flow Chart
Auto focus
Focus search up
FOK=H
NO
YES
FZC = H
NO
YES
FZC = L
NO
YES
END
Focus servo ON
(Check whether FZC is continuously high
for the period of time E set with register 5.)
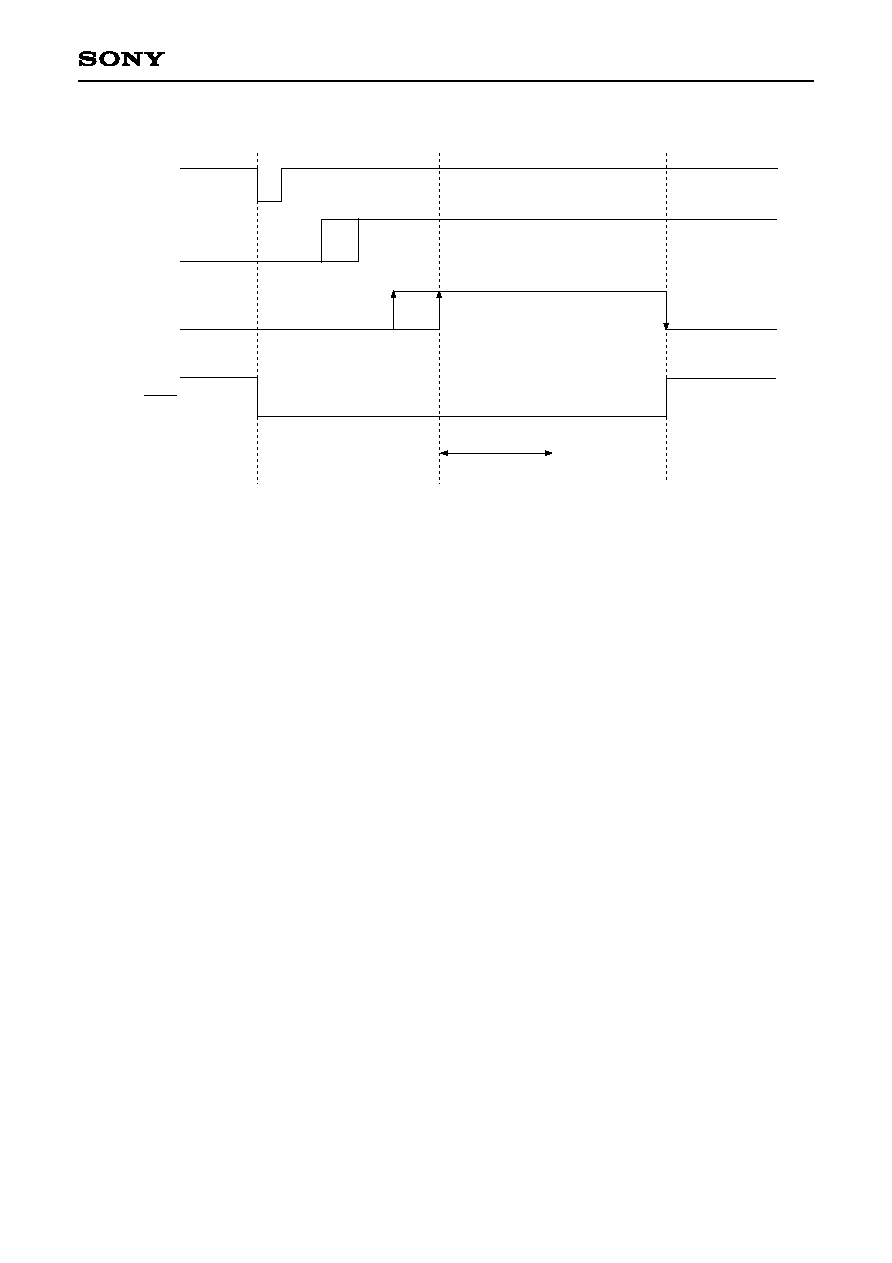
≠ 65 ≠
CXD2588Q/R
Fig. 4-6-(b). Auto Focus Timing Chart
(b) Track jump
1, 10 and 2N-track jumps are performed respectively. Always use this when the focus, tracking, and sled
servos are on. Note that tracking gain-up and braking-on should be sent beforehand because they are not
involved in this sequence.
∑ 1-track jump
When $48 ($49 for REV) is received from the CPU, a FWD (REV) 1-track jump is performed in accordance
with Fig. 4-7. Set blind A and brake B with register 5.
∑ 10-track jump
When $4A ($4B for REV) is received from the CPU, a FWD (REV) 10-track jump is performed in accordance
with Fig. 4-8. The principal difference from the 1-track jump is to kick the sled. In addition, after kicking the
actuator, when 5 tracks have been counted through COUT, the brake is applied to the actuator. Then, when
the actuator speed is found to have slowed up enough (determined by the COUT cycle becoming longer than
the overflow C set with register 5), the tracking and sled servos are turned on.
∑ 2N-track jump
When $4C ($4D for REV) is received from the CPU, a FWD (REV) 2N-track jump is performed in accordance
with Fig. 4-9. The track jump count N is set with register 7. Although N can be set to 2
16
tracks, note that the
setting is actually limited by the actuator. COUT is used for counting the number of jumps.
Although the 2N-track jump basically follows the same sequence as the 10-track jump, the one difference is
that after the tracking servo is turned on, the sled continues to move only for "D", set with register 6.
∑ N-track move
When $4E ($4F for REV) is received from the CPU, a FWD (REV) N-track move is performed in accordance
with Fig. 4-10. N can be set to 2
16
tracks. COUT is used for counting the number of jumps. The N-track move
is executed only by moving the sled, and is therefore suited for moving across several thousand to several
ten-thousand tracks.
XLAT
FOK
(FZC)
BUSY
Command for
DSSP
$47latch
$03
Blind E
$08
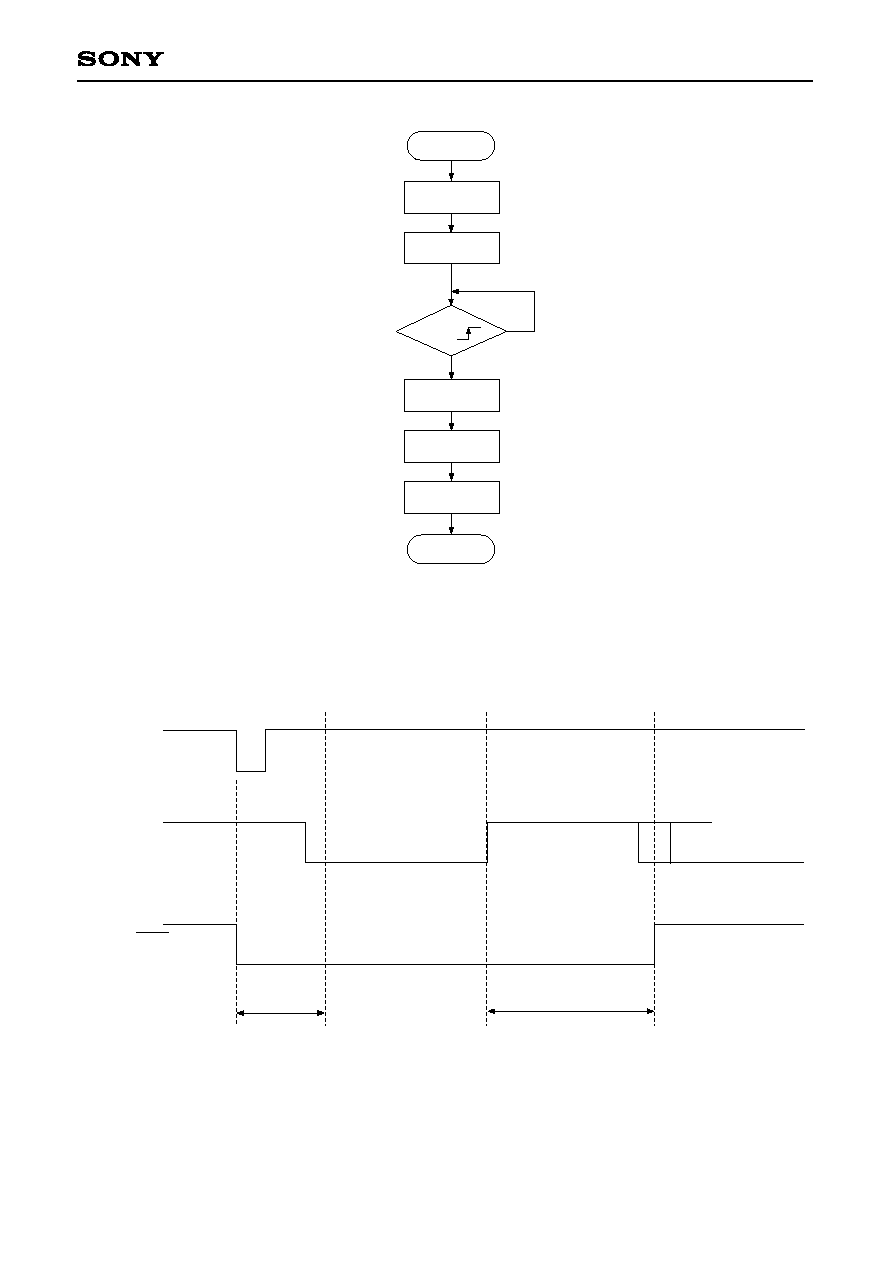
≠ 66 ≠
CXD2588Q/R
Fig. 4-7-(a). 1-Track Jump Flow Chart
Track
NO
YES
END
Track FWD kick
sled servo OFF
WAIT
(Blind A)
COUT =
Track REV
kick
WAIT
(Brake B)
Track, sled
servo ON
(FWD kick for
REV jump)
(REV kick for
REV jump)
Fig. 4-7-(b). 1-Track Jump Timing Chart
XLAT
COUT
BUSY
Command for
DSSP
$48 (REV = $49) latch
$28 ($2C)
Blind A
Brake B
$2C ($28)
$25
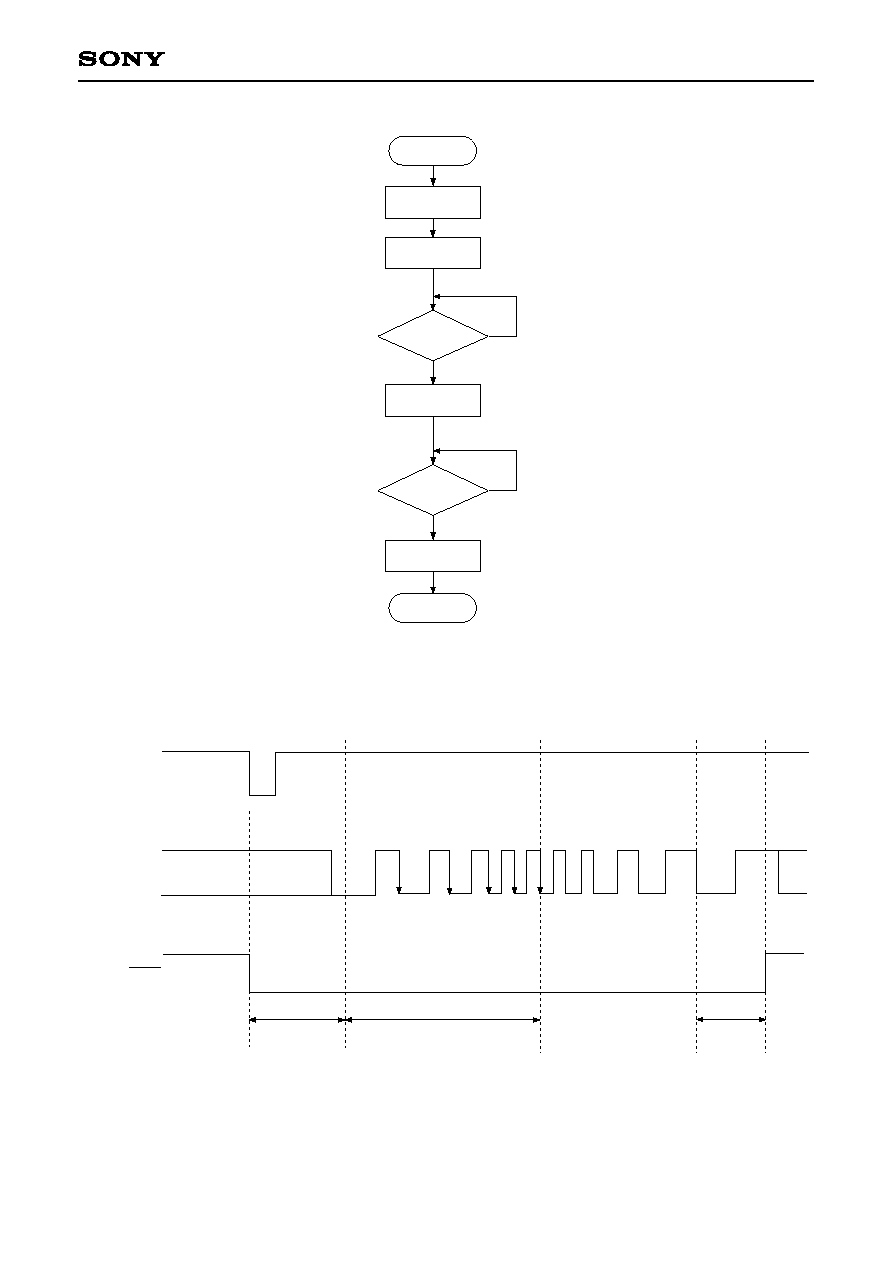
≠ 67 ≠
CXD2588Q/R
Fig. 4-8-(a). 10-Track Jump Flow Chart
10 Track
NO
YES
END
Track, sled
FWD kick
WAIT
(Blind A)
COUT = 5 ?
Track, REV
kick
Track sled
servo ON
(Check whether the COUT cycle
is longer than overflow C.)
(Counts COUT
◊
5)
NO
YES
C = Overflow ?
Fig. 4-8-(b). 10-Track Jump Timing Chart
XLAT
COUT
BUSY
Command for
DSSP
$4A (REV = $4B) latch
Blind A
$2A ($2F)
COUT 5 count
$2E ($2B)
Overflow C
$25
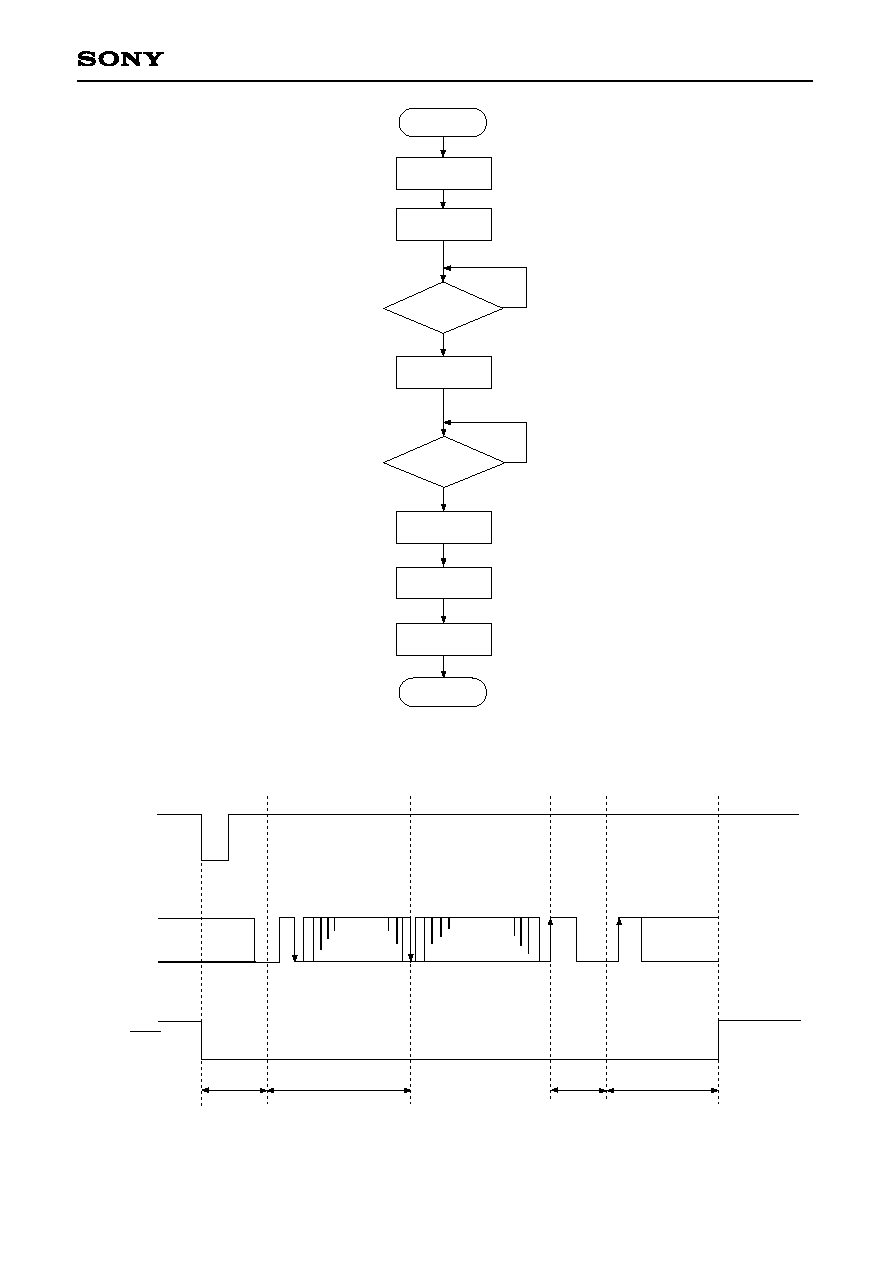
≠ 68 ≠
CXD2588Q/R
Fig. 4-9-(a). 2N-Track Jump Flow Chart
2N Track
NO
YES
END
Track, sled
FWD kick
WAIT
(Blind A)
COUT = N
Track REV
kick
Track servo
ON
NO
YES
C = Overflow
WAIT
(Kick D)
Sled servo
ON
Fig. 4-9-(b). 2N-Track Jump Timing Chart
XLAT
BUSY
Command for
DSSP
Blind A
$2A ($2F)
COUT N count
$2E ($2B)
Overflow C
Kick D
$26 ($27)
$25
$4C (REV = $4D) latch
COUT
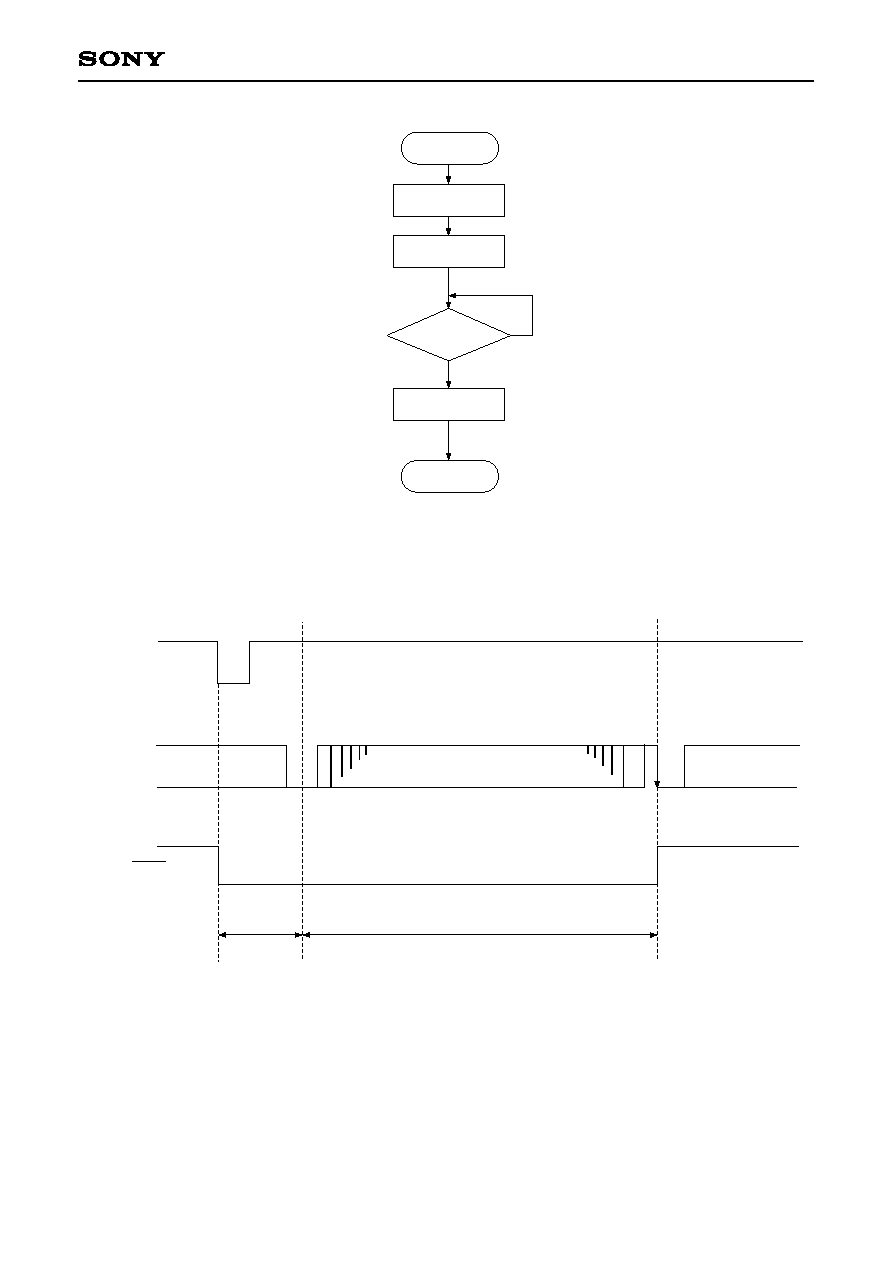
≠ 69 ≠
CXD2588Q/R
Fig. 4-10-(a). N-Track Move Flow Chart
N Track move
NO
YES
END
Track servo OFF
Sled FWD kick
WAIT
(Blind A)
COUT = N
END
Track, sled
servo OFF
Fig. 4-10-(b). N-Track Move Timing Chart
XLAT
BUSY
Command for
DSSP
$22 ($23)
Blind A
COUT N count
$20
$4E (REV = $4F) latch
COUT
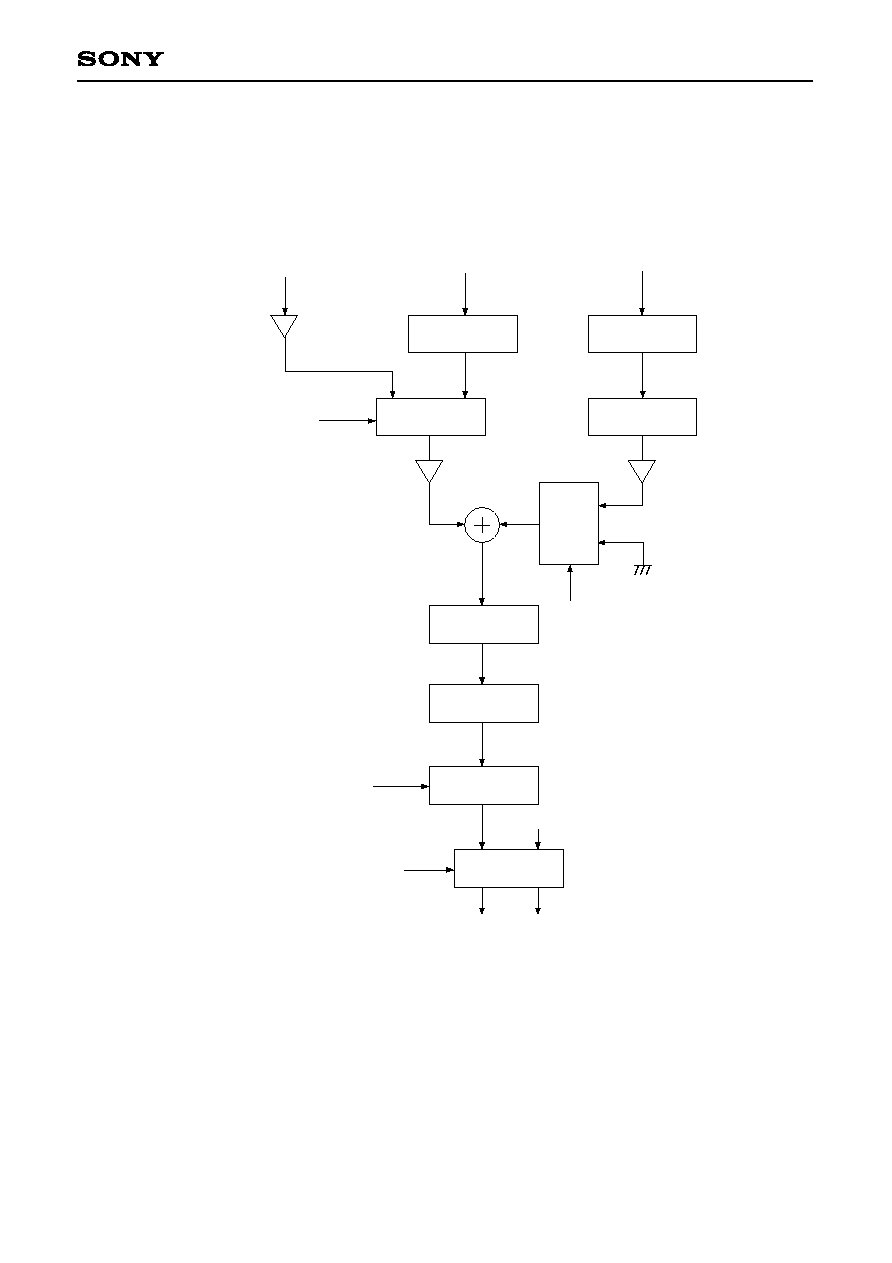
≠ 70 ≠
CXD2588Q/R
ß4-7. Digital CLV
Fig. 4-11 shows the block diagram. Digital CLV outputs MDS error and MDP error with PWM, with the
sampling frequency increased up to 130Hz during normal-speed playback in CLVS, CLVP and other modes.
In addition, the digital spindle servo gain is variable.
MDP
Digital CLV
CLVS U/D
MDS Error
MDP Error
CLV P/S
Measure
Measure
2/1 MUX
Oversampling
Filter-1
Gain
MDS
1/2
MUX
CLV P/S
Oversampling
Filter-2
Noise Shape
Modulation
KICK, BRAKE, STOP
MDS
Mode Select
Gain
MDP
DCLVMD, LPWR
PWMI
Fig. 4-11. Block Diagram
CLVS U/D : Up/down signal from CLVS servo
MDS error : Frequency error for CLVP servo
MDP error : Phase error for CLVP servo
PWMI
: Spindle drive signal from the microcomputer
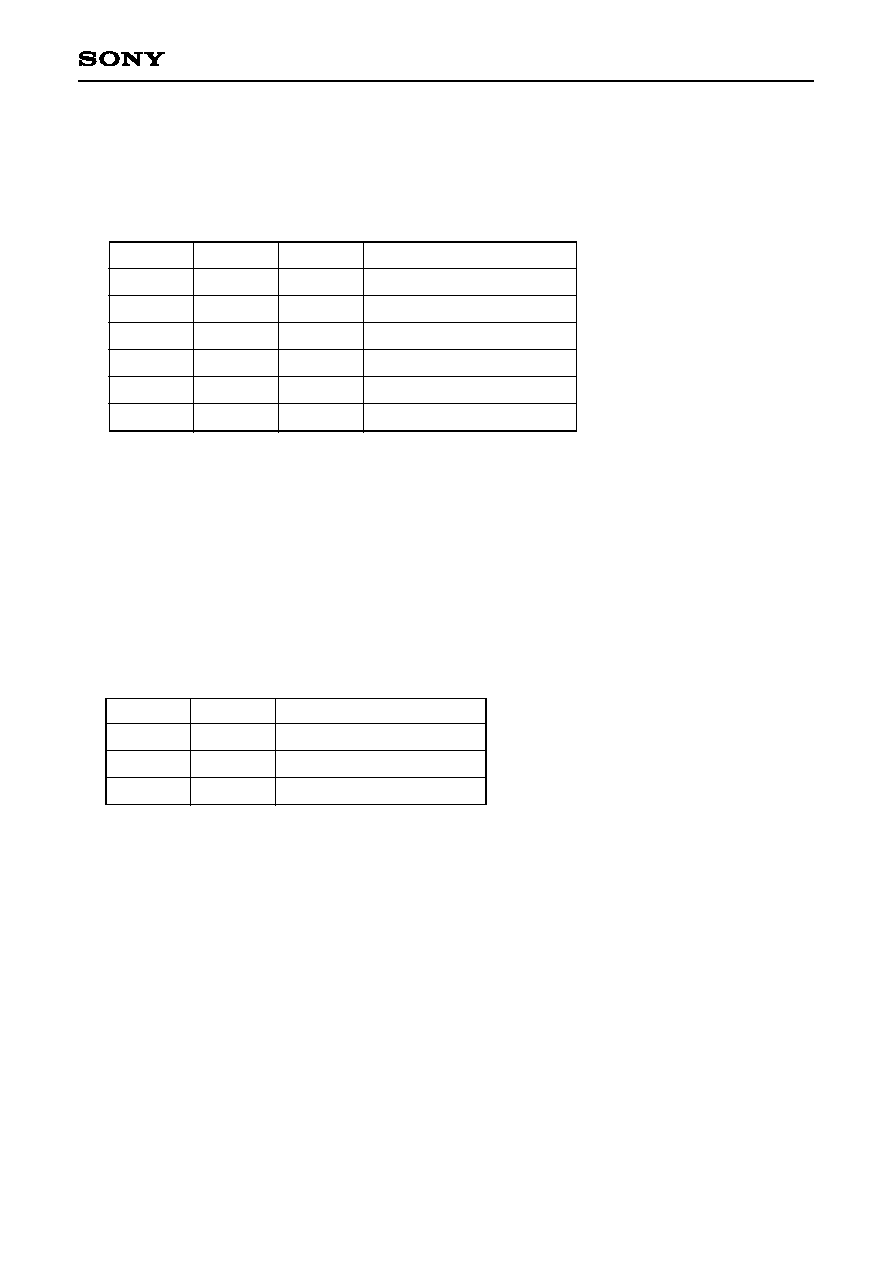
≠ 71 ≠
CXD2588Q/R
ß4-8. CD-DSP Block Playback Speed
In the CXD2588Q/R, the following playback modes can be selected through different combinations of the
crystal, XTSL pin and the DSPB command of $9X.
CD-DSP block playback speed
Crystal
768Fs
768Fs
768Fs
384Fs
384Fs
384Fs
0
1
1
0
0
1
1
0
1
0
1
1
4
◊
1
1
◊
2
◊
1
◊
2
◊
1
◊
2
XTSL
DSPB
CD-DSP block playback speed
Fs = 44.1kHz.
1
In 4
◊
speed playback, the timer value for the auto sequence is halved.
2
Low power consumption mode. The CD-DSP processing speed is halved, allowing power consumption
to be reduced.
ß4-9. DAC Block Playback Speed
The operation speed for the DAC block is determined by the crystal and the MCSL command of $9X
regardless of the CD-DSP operating conditions noted above. This allows the playback modes for the DAC and
CD-DSP blocks to be set independently.
1-bit DAC block playback speed
Crystal
768Fs
768Fs
384Fs
1
0
0
1
◊
2
◊
1
◊
MCSL
DAC block playback speed
Fs = 44.1kHz.
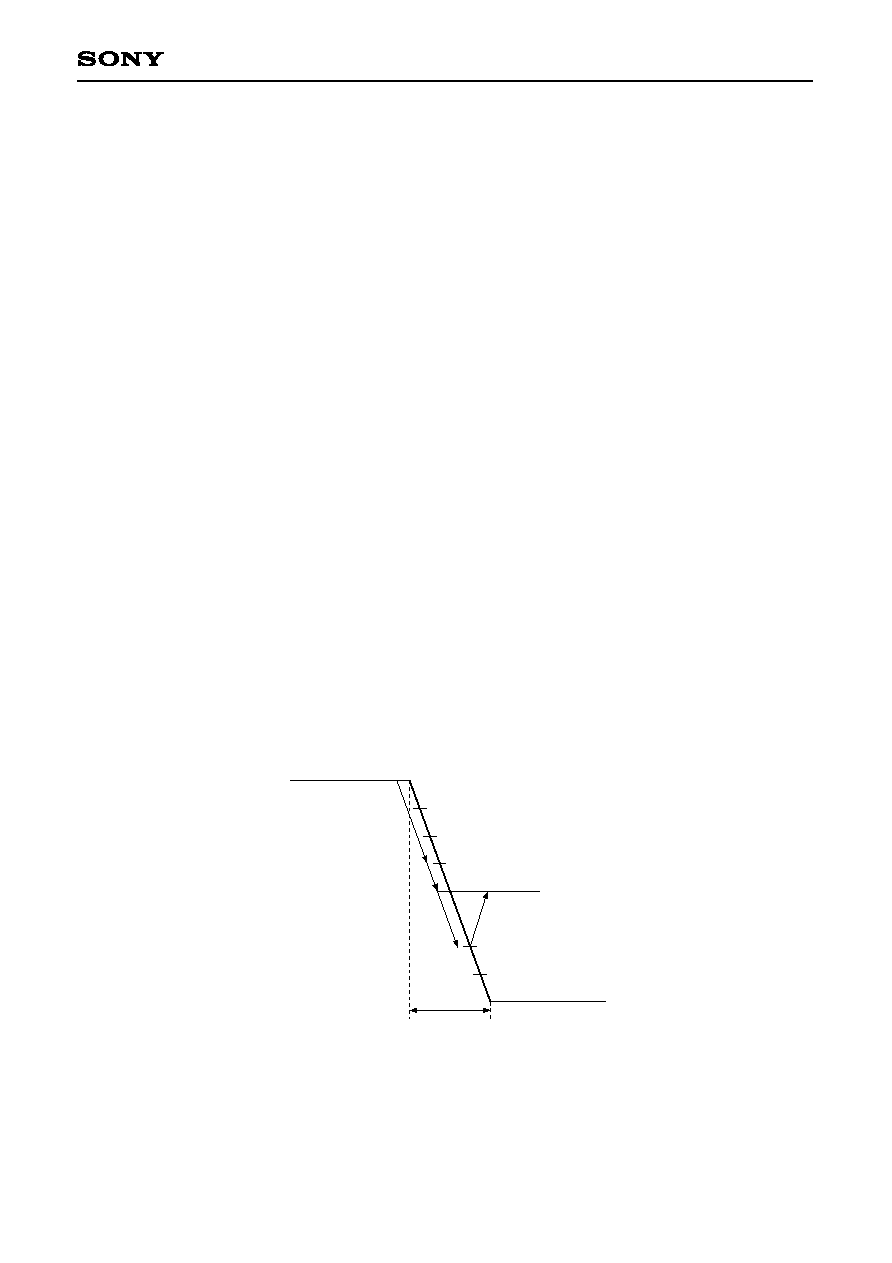
≠ 72 ≠
CXD2588Q/R
ß4-10. DAC Block Input Timing
Timing Chart 4-12 shows the DAC block input timing chart.
In the CXD2588Q/R, the data can be transferred from the CD signal processor block to the DAC block via the
outside of the LSI. This allows the data to be sent to the DAC block via the audio DSP, etc.
As for the data input to the DAC block without using the audio DSP, there are two methods: one is to connect
directly EMPH, LRCK, BCK and PCMD with EMPHI, LRCKI, BCKI and PCMDI outside the LSI; and the other
is to set OUTL0 of $8X to 1. Note that the outputs of EMPH, LRCK, BCK and PCMD become low when OUTL0
of $8X is set to 0 .
ß4-11. Description of DAC Block Functions
Zero data detection
When the condition where the lower 4 bits of the input data are DC and the remaining upper bits are all "0" or
all "1" has continued about for 300ms, zero data is detected. Zero data detection is performed independently
for the left and right channels.
Mute flag output
The LMUT and RMUT pins go active when any one of the following conditions is met.
The polarity can be selected with the ZDPL command of $9X.
∑ When zero data is detected
∑ When a high signal is input to the SYSM pin
∑ When the SMUT command of $AX is set
Attenuation operation
Assuming attenuation data X1, X2 and X3 (X1 > X3 > X2), the corresponding audio outputs are Y1, Y2 and Y3
(Y1 > Y3 > Y2). First, X1 is sent, followed by X2. If X2 is sent before X1 reaches Y1 (A in the figure), X1
continues approaching Y2. Next, if X3 is sent before X1 reaches Y2 (B or C in the figure), X1 then approaches
Y3 from the value (B or C in the figure) at that point.
A
Y1
B
Y3
C
Y2
23.2 [ms]
≠
00 (H)
0dB
7F (H)

≠ 73 ≠
CXD2588Q/R
DAC block mute operation
Soft mute
Soft mute results and the input data is attenuated to zero when any one of the following conditions is met.
∑ When attenuation data of "000" (high) is set
∑ When the SMUT command of $AX is set to 1
∑ When a high signal is input to the SYSM input pin
Forced mute
Forced mute results when the FMUT command of $AX is set to 1.
Forced mute fixes the PWM output that is input to the LPF block to low.
When setting FMUT, set OPSL2 to 1. (See the $AX commands.)
Zero detection mute
Forced mute is applied when the ZMUT command of $9X is set to 1 and the zero data is detected for the
left and right channels.
(See "Zero data detection".)
When the ZMUT command of $9X is set to 1, the forced mute is applied even if the mute flag output
condition is met. When the zero detection mute is on, set the DCOF command of $9X to 1.
Soft mute on
Soft mute off
Soft mute off
23.2 [ms]
23.2 [ms]
0dB
≠
dB
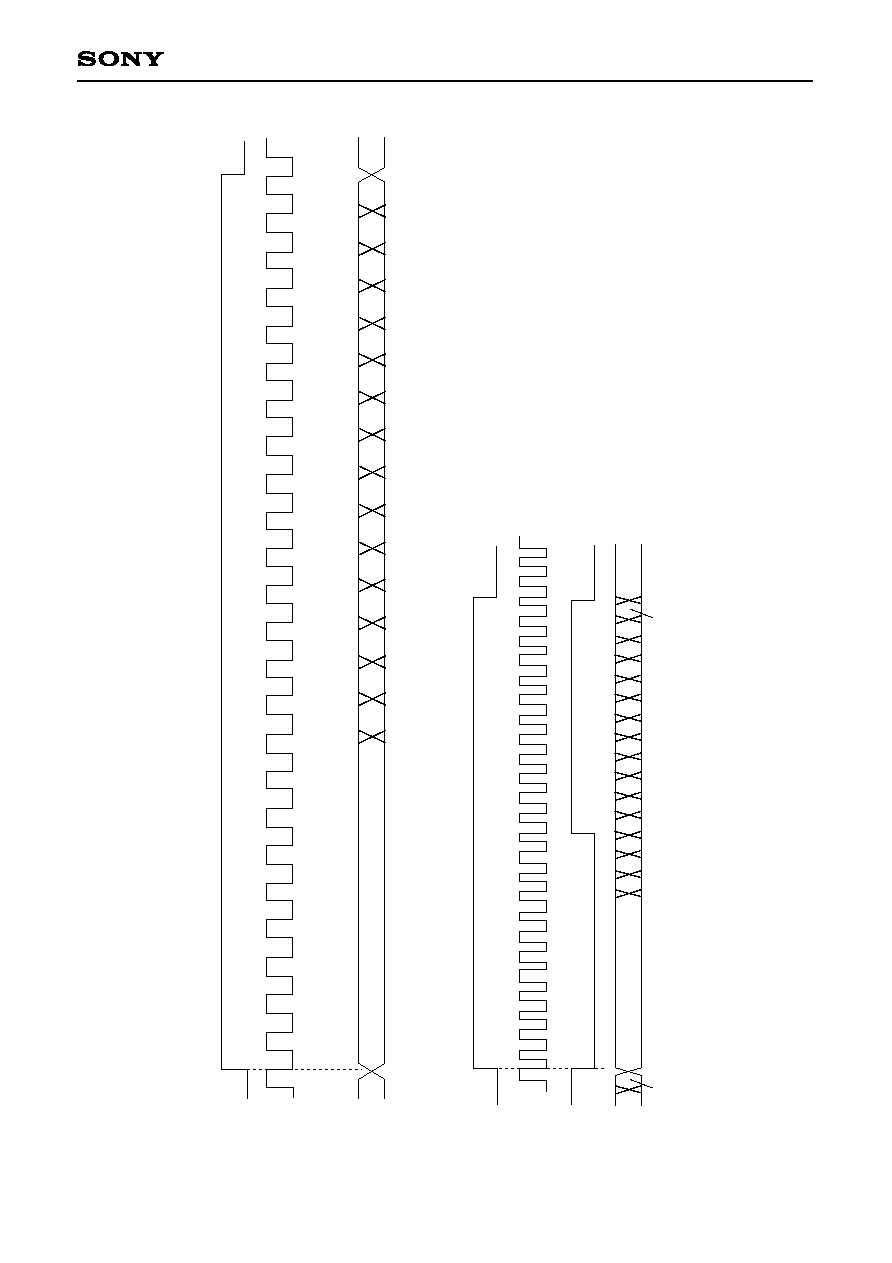
≠ 74 ≠
CXD2588Q/R
Input Timing DAC Block
N
o
r
m
a
l
-
S
p
e
e
d
P
l
a
y
b
a
c
k
L
R
C
K
I
(
4
4
.
1
k
)
B
C
K
I
(
2
.
1
2
M
)
1
2
4
P
C
M
D
I
R
0
L
c
h
M
S
B
(
1
5
)
L
1
4
L
1
3
L
1
2
L
1
1
L
1
0
L
9
L
8
L
7
L
6
L
5
L
4
L
3
L
2
L
1
L
0
R
M
S
B
P
C
M
D
I
L
R
C
K
I
(
8
8
.
2
k
)
B
C
K
I
(
4
.
2
3
M
)
D
o
u
b
l
e
-
S
p
e
e
d
P
l
a
y
b
a
c
k
2
4
R
0
L
c
h
M
S
B
(
1
5
)
R
c
h
M
S
B
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
2
L
0
Timing Chart 4-12
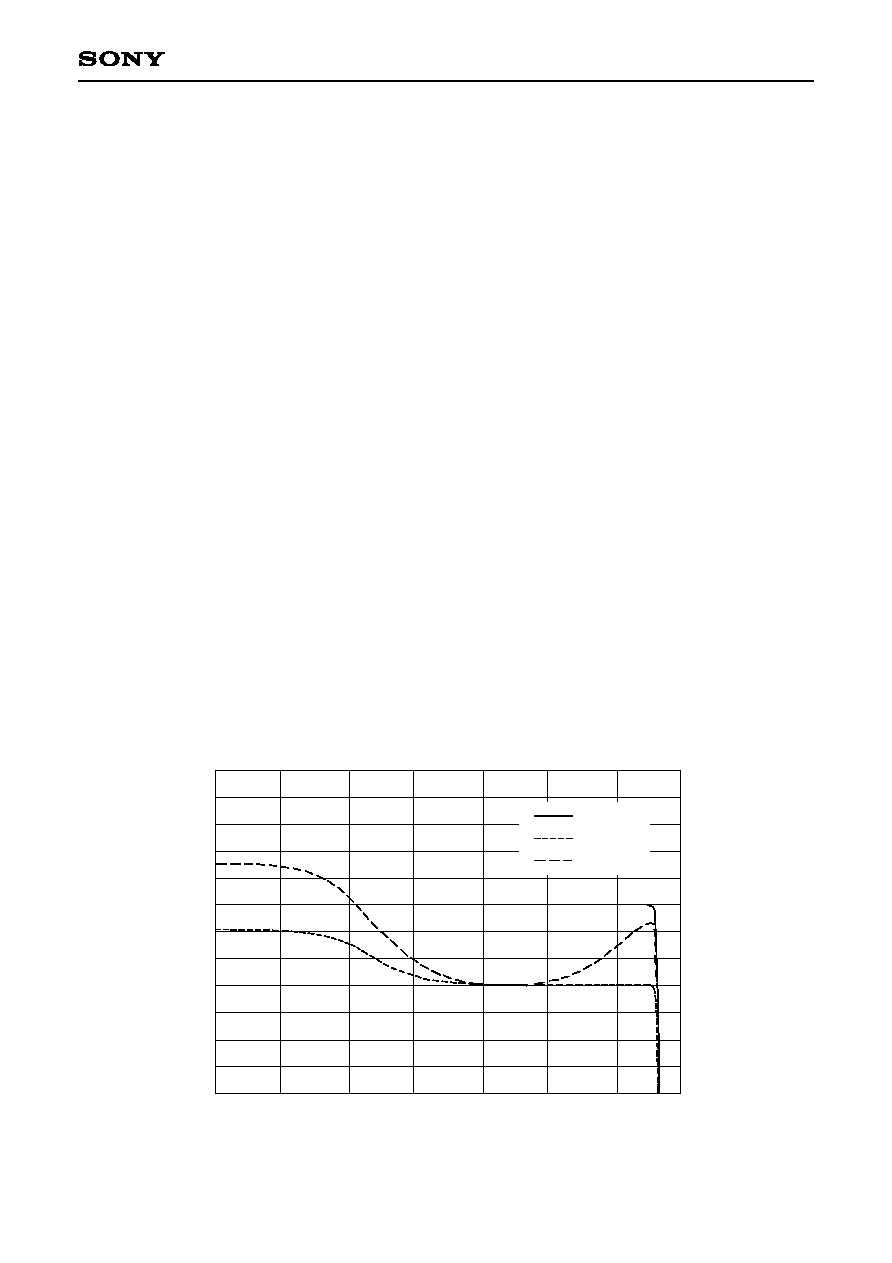
≠ 75 ≠
CXD2588Q/R
Normal
DBB MID
DBB MAX
10.00
≠4.00
6.00
4.00
2.00
0.00
≠2.00
8.00
≠6.00
≠8.00
≠10.00
≠12.00
≠14.00
10
30
100
300
1k
3k
10k
30k
Digital Bass Boost Frequency Response [Hz]
[
d
B
]
Graph 4-13.
LRCK Synchronization
Synchronization is performed at the first falling edge of the LRCK input during reset.
After that, synchronization is lost when the LRCK input frequency changes and resynchronization must be
performed.
The LRCK input frequency changes when the master clock of the LSI is switched and the playback speed
changes such as the following cases.
∑ When the XTSL pin switches between high and low
∑ When the DSPB command of $9X setting changes
∑ When the MCSL command of $9X setting changes
LRCK switching may also be performed if there are other ICs between the CD-DSP block and the DAC
block. Resynchronization must be performed in this case as well.
For resynchronization, set the LRWO command of $AX to 1, wait for one LRCK cycle or more, and then set
LRWO to 0.
When setting LRWO, set OPSL2 to 1. (See the $AX commands.)
SYCOF
When LRCK, PCMD and BCK are connected directly with LRCKI, PCMDI and BCKI, respectively, playback
can be performed easily in CAV-W mode by setting SYCOF of address 9 to 1.
Normally, the memory proof, etc. is used for playback in CAV-W mode.
In CAV-W mode, the LRCK output conforms not to the crystal but to the VCO. Therefore, synchronization is
frequently lost.
Setting SYCOF of address 9 to 1 ignores that the LRCKI input synchronization is lost, facilitating playback.
However, the playback is not perfect because pre-value hold or data skip occurs due to the wow flutter in the
LRCKI input.
Set SYCOF to 0 except when connecting LRCK, PCMD and BCK directly with LRCKI, PCMDI and BCKI,
respectively, and performing playback in CAV-W mode.
Digital Bass Boost
Bass boost without external parts is possible using the built-in digital filter. The boost strength has two levels:
Mid. and Max. BSBST and BBSL of address A are used for the setting.
See Graph 4-13 for the digital bass boost frequency response.
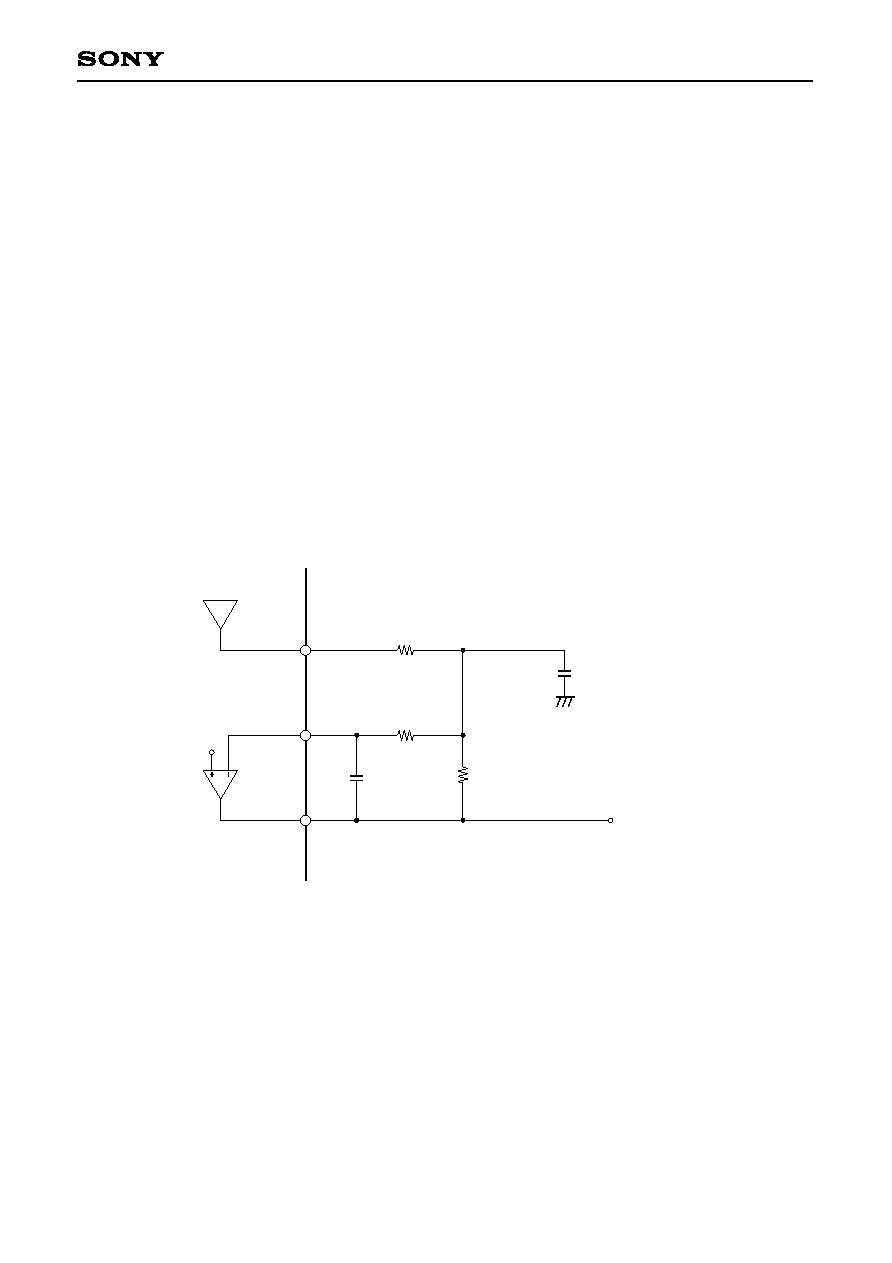
≠ 76 ≠
CXD2588Q/R
Analog out
C2
680p
12k
12k
12k
C1
150p
AOUT1 (2)
AIN1 (2)
LOUT1 (2)
Vc
Fig. 4-14. LPF External Circuit
ß4-12. LPF Block
The CXD2588Q/R contains an initial-stage secondary active LPF with numerous resistors and capacitors and
an operational amplifier with reference voltage.
The resistors and capacitors are attached externally, allowing the cut-off frequency fc to be determined flexibly.
The reference voltage (V
C
) is (AV
DD
≠ AV
SS
)
◊
0.43.
The LPF block application circuit is shown below.
In this circuit, the cut-off frequency is fc
40kHz.
The external capacitors' values when fc = 30kHz and 50kHz are noted below as a reference.
The resistors' values do not change at this time.
∑ When fc
30kHz:
C1 = 200pF, C2 = 910pF
∑ When fc
50kHz:
C1 = 120pF, C2 = 560pF
LPF Block Application Circuit
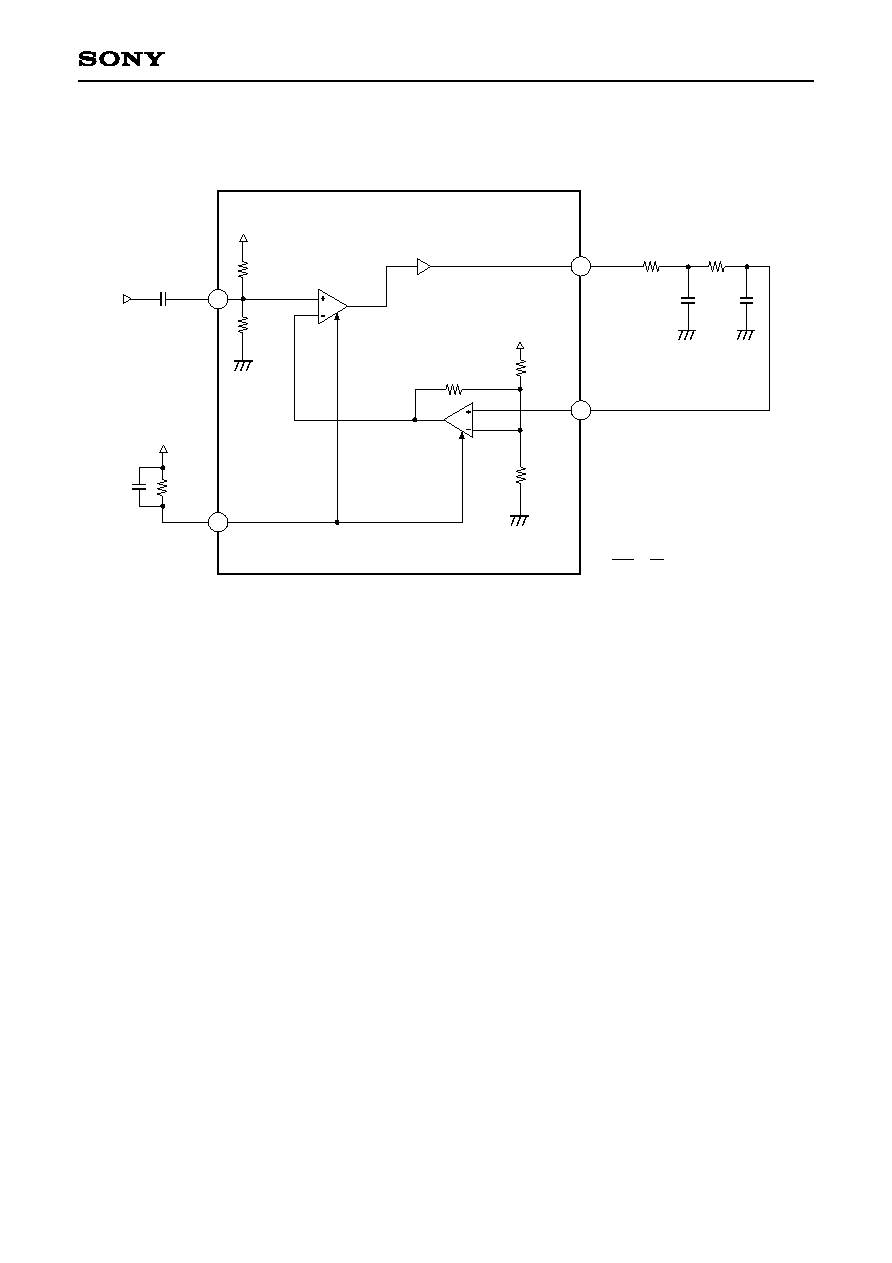
≠ 77 ≠
CXD2588Q/R
ß4-13. Asymmetry Compensation
Fig. 4-15 shows the block diagram and circuit example.
RFAC
R1
R1
ASYO
ASYI
R1 2
R2 5
=
BIAS
R1
R1
R2
CXD2588Q/R
Fig. 4-15. Asymmetry Compensation Application Circuit
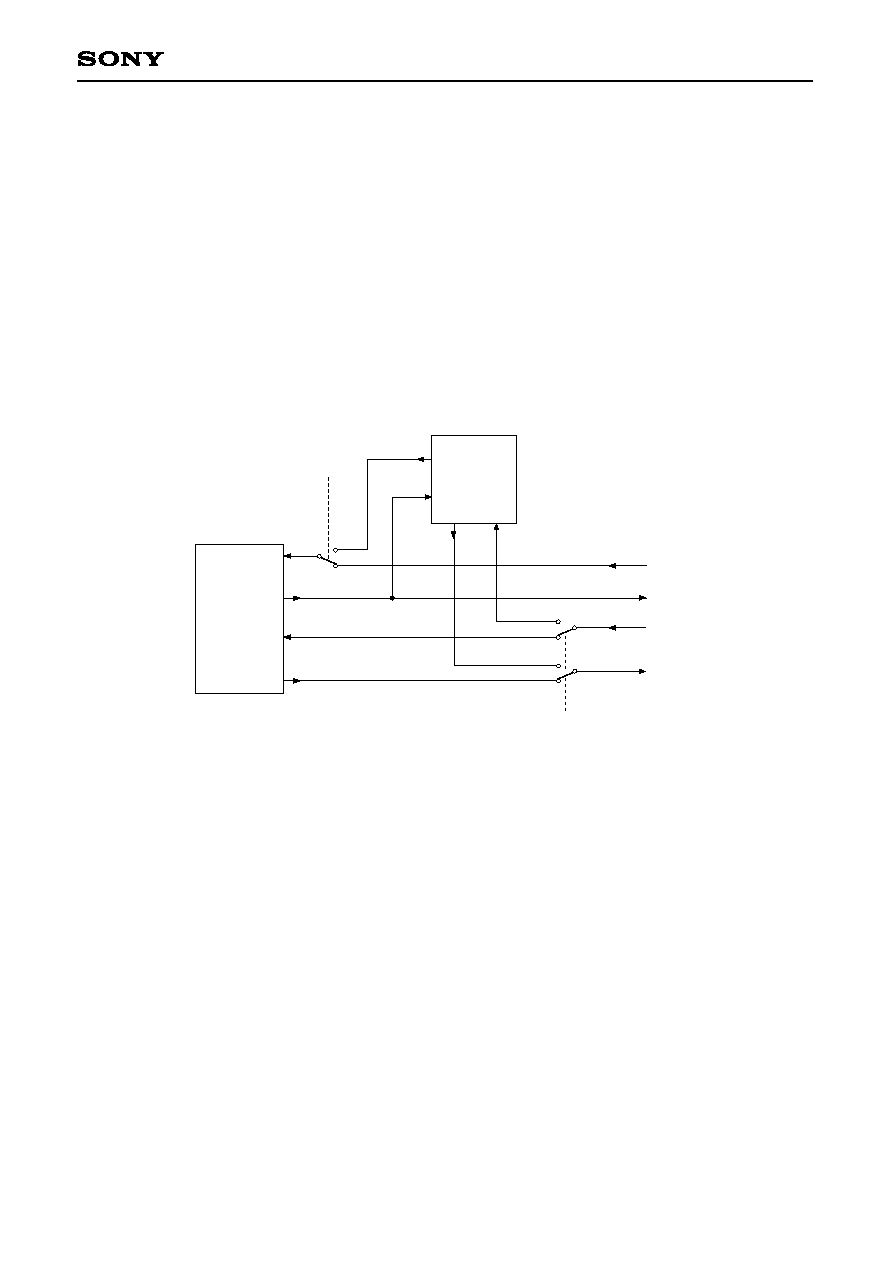
≠ 78 ≠
CXD2588Q/R
ß4-14. CD TEXT Data Demodulation
∑ In order to demodulate the CD TEXT data, set the command $8 Data 6 D3 TXON to 1. During TXON = 1,
connect EXCK to low and do not use the data output from SBSO because the CD TEXT demodulation circuit
uses EXCK and the SBSO pin exclusively.
It requires 26.7ms (max.) to demodulate the CD TEXT data correctly after TXON is set to 1.
∑ The CD TEXT data is output by switching the SQSO pin with the command. The CD TEXT data output is
enabled by setting the command $8 Data 6 D2 TXOUT to 1. To read data, the readout clock should be input
to SQCK.
∑ The readable data are the CRC counting results for the each pack and the CD TEXT data (16 bytes) except
for CRC data.
∑ When the CD TEXT data is read, the order of the MSB and LSB is inverted within each byte. As a result,
although the sequence of the bytes is the same, the bits within the bytes are now ordered LSB first.
∑ Data which can be stored in the LSI is 1 packet (4 packs).
Fig. 4-16. Block Diagram of CD TEXT Demodulation Circuit
SQCK
SQSO
TXOUT
Subcode
Decoder
CD TEXT
Decoder
TXON
SBSO
EXCK
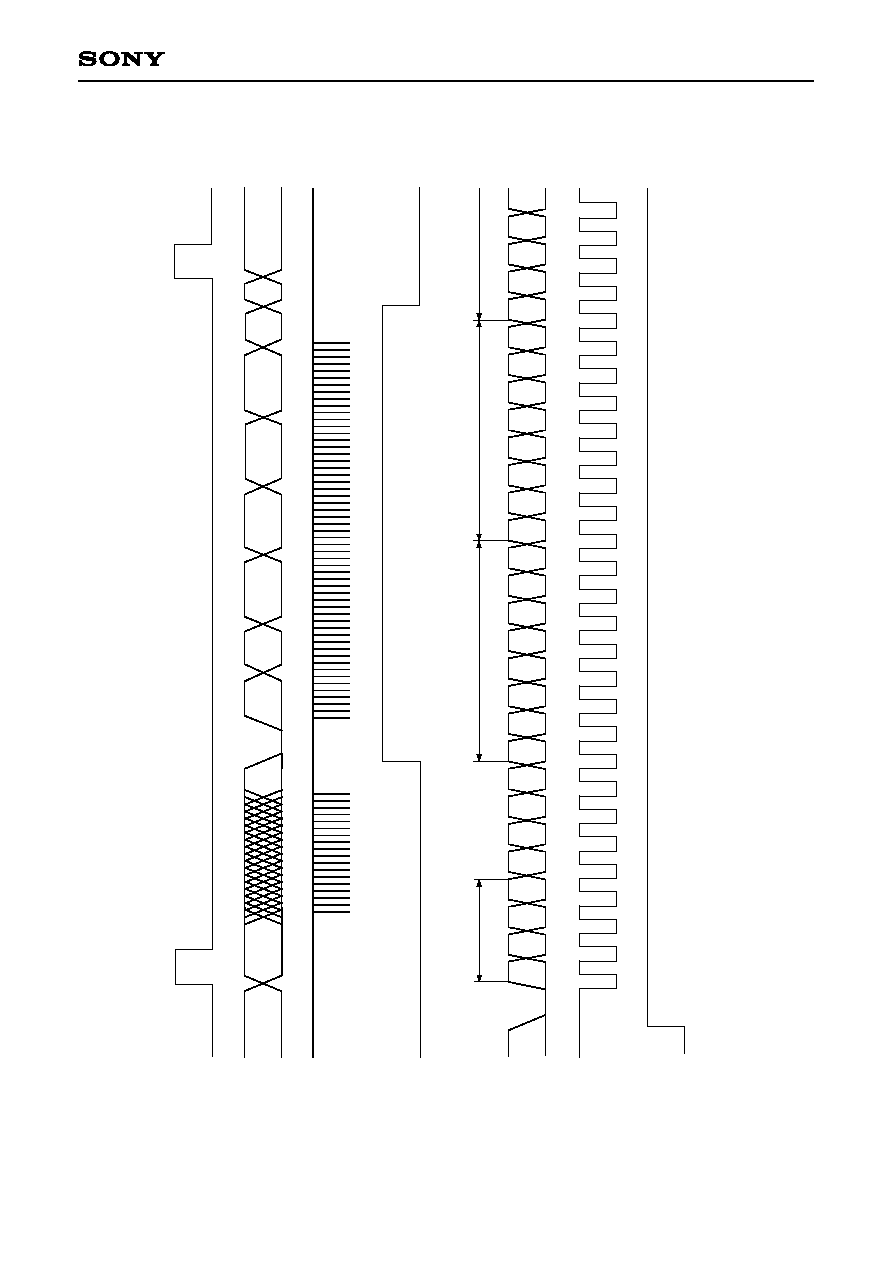
≠ 79 ≠
CXD2588Q/R
C
R
C
4
C
R
C
3
C
R
C
2
C
R
C
1
0
0
0
0
S
2
R
2
W
1
V
1
U
1
T
1
S
1
R
1
U
3
T
3
S
3
R
3
W
2
V
2
U
2
T
2
W
4
V
4
U
4
T
4
S
4
C
R
C
D
a
t
a
I
D
1
(
P
a
c
k
1
)
I
D
2
(
P
a
c
k
1
)
I
D
3
(
P
a
c
k
1
)
1
6
B
y
t
e
1
6
B
y
t
e
1
6
B
y
t
e
1
6
B
y
t
e
4
b
i
t
4
b
i
t
S
u
b
c
o
d
e
Q
D
a
t
a
S
C
O
R
T
X
O
U
T
(
c
o
m
m
a
n
d
)
S
Q
C
K
S
Q
S
O
S
Q
C
K
T
X
O
U
T
(
c
o
m
m
a
n
d
)
L
S
B
M
S
B
L
S
B
M
S
B
L
S
B
C
R
C
0
P
a
c
k
1
P
a
c
k
2
P
a
c
k
3
P
a
c
k
4
C
R
C
F
C
R
C
F
8
0
C
l
o
c
k
S
Q
S
O
5
2
0
C
l
o
c
k
Fig. 4-17. CD TEXT Data Timing Chart

≠ 80 ≠
CXD2588Q/R
ß5. Description of Servo Signal Processing System Functions and Commands
ß5-1. General Description of Servo Signal Processing System (V
DD
: Supply voltage)
Focus servo
Sampling rate:
88.2kHz (when MCK = 128Fs)
Input range:
0.3V
DD
to 0.7V
DD
Output format:
7-bit PWM
Others:
Offset cancel
Focus bias adjustment
Focus search
Gain-down function
Defect countermeasure
Auto gain control
Tracking servo
Sampling rate:
88.2kHz
Input range:
0.3V
DD
to 0.7V
DD
Output format:
7-bit PWM
Others:
Offset cancel
E:F balance adjustment
Track jump
Gain-up function
Defect countermeasure
Drive cancel
Auto gain control
Vibration countermeasure
Sled servo
Sampling rate:
345Hz (MCK = 128Fs)
Input range:
0.3V
DD
to 0.7V
DD
Output format:
7-bit PWM
Others:
Sled move
FOK, MIRR, DFCT signals generation
RF signal sampling rate:
1.4MHz (MCK = 128Fs)
Input range:
0.43V
DD
to V
DD
Others:
RF zero level automatic measurement
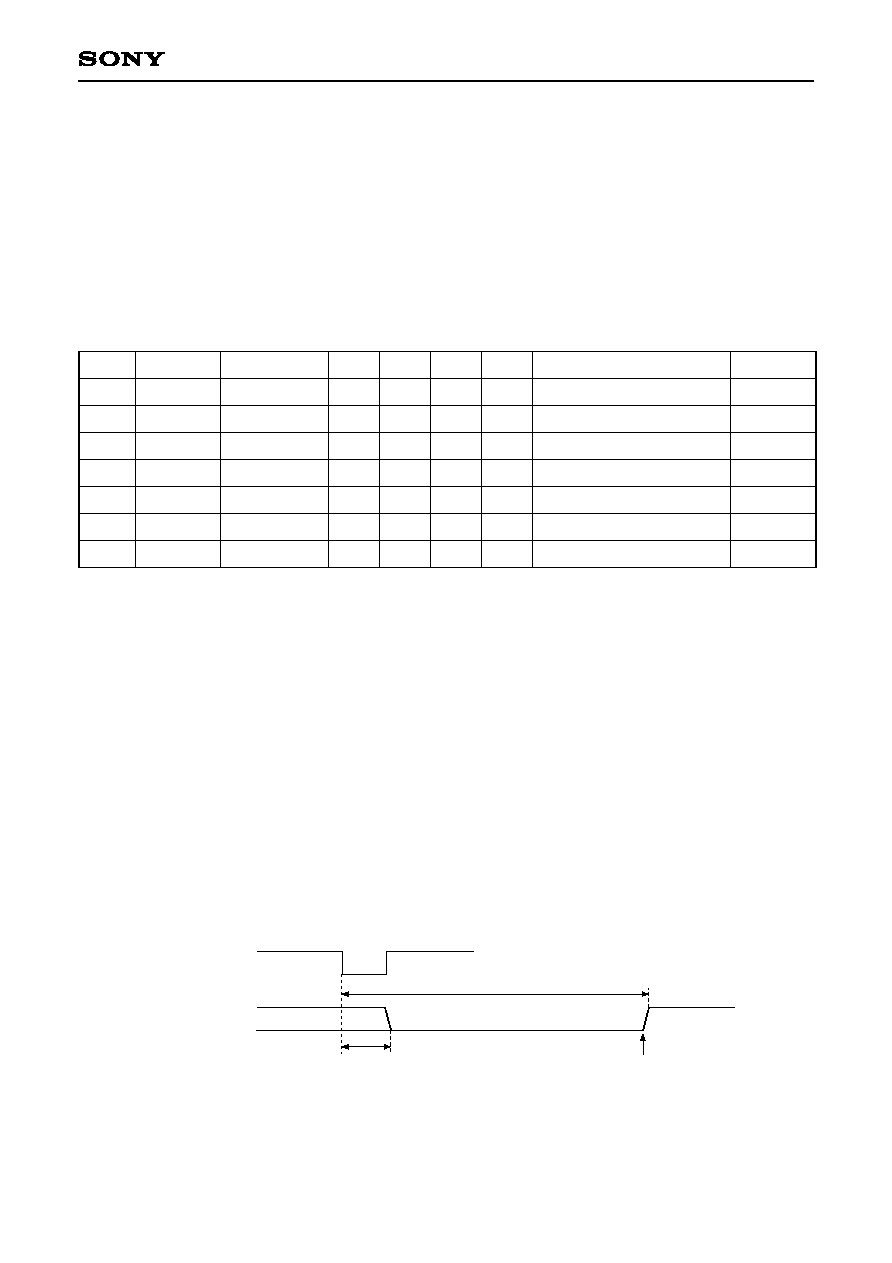
≠ 81 ≠
CXD2588Q/R
ß5-2. Digital Servo Block Master Clock (MCK)
The internal master clock (MCK) is generated by dividing the frequency of the signal input to FSTI. The
frequency division ratio is 1, 1/2 or 1/4.
Table 5-1 below shows the hypothetical case where the crystal clock generated from the digital signal
processor block is 2/3 frequency-divided and input to the FSTI pin by externally connecting the FSTI pin and
the FSTO pin. By setting $8X command D1 OUTL1 to 1, FSTI and FSTO can be internally connected. (See
$8X commands.)
The XT4D and XT2D command settings can be made with D13 and D12 of $3F, and XT1D with D1 of $3E.
(Default = 0)
The digital servo block is designed with an MCK frequency of 5.6448MHz.
Fs = 44.1kHz,
: Don't care
Table 5-1.
ß5-3. AVRG (Average) Measurement and Compensation
The CXD2588Q/R has a circuit that measures the average of RFDC, VC, FE, and TE and a circuit that
compensates them to control servo effectively.
AVRG measurement and compensation is necessary to initialize the CXD2588Q/R, and is able to cancel the
offset.
The level applied to the VC, FE, RFDC and TE pins can be measured by setting D15 (VLCM), D13 (FLM), D11
(RFLM) and D4 (TCLM) of $38 respectively to 1.
AVRG measurement consists of digitally measuring the level applied to each analog input pin by taking the
average of 256 samples, and then loading these values into the AVRG register.
AVRG measurement requires approximately 2.9ms to 5.8ms after the command is received.
During AVRG measurement, if the upper 8 bits of the command register are 38 (Hex), the completion of AVRG
measurement operation can be confirmed through the SENS pin. (See Timing Chart 5-2.)
XLAT
SENS
(= XAVEBSY)
Max. 1µs
Completion of AVRG measurement
2.9 to 5.8ms
Timing Chart 5-2.
Mode
1
2
3
4
5
6
7
384Fs
384Fs
384Fs
768Fs
768Fs
768Fs
768Fs
256Fs
256Fs
256Fs
512Fs
512Fs
512Fs
512Fs
0
1
0
1
0
1
0
1
0
0
1
0
0
1
0
0
0
1
1/2
1/2
1
1/2
1/4
1/4
256Fs
128Fs
128Fs
512Fs
256Fs
128Fs
128Fs
Crystal
FSTO (FSTI)
XTSL XT4D XT2D XT1D
Frequency division ratio
MCK

≠ 82 ≠
CXD2588Q/R
<Measurement>
∑ VC AVRG
The offset can be canceled by measuring the VC level which is the center voltage for the system and using
that value to apply compensation to each input error signal.
∑ FE AVRG
The FE signal DC level is measured. In addition, compensation is applied to the FZC comparator level output
from the SENS pin during FCS SEARCH (focus search) using these measurement results.
∑ TE AVRG
The TE signal DC level is measured.
∑ RF AVRG
The MIRR, DFCT and FOK signals are generated from the RF signal. Since the FOK signal is generated by
comparing the RF signal at a certain level, it is necessary to establish a zero level which becomes the
comparator level reference. Therefore, the RF signal is measured before playback, and is compensated to
take this level as the zero level.
An example of sending AVRG measurement and compensation commands is shown below.
(Example)
$380800 (RF AVRG measurement on)
$382000 (FE AVRG measurement on)
$380010 (TE AVRG measurement on)
$388000 (VC AVRG measurement on)
(Complete each AVRG measurement before starting the next.)
$38140A (RFLC, FLC0, FLC1 and TLC1 commands on)
(The required compensation should be turned on together; see Fig. 5-3.)
An interval of 5.8ms (when MCK = 128Fs) or more must be maintained between each command, or the SENS
pin must be monitored to confirm that the previous command has been completed before the next AVRG
command is sent.
<Compensation>
See Fig. 5-3 for the contents of each compensation below.
∑ RFLC
The difference by which the RF signal exceeds the RF AVRG value is input to the RF In register.
(00 is input when the RF signal is lower than the RF AVRG value.)
∑ TCL0
The value obtained by subtracting the VC AVRG value from the TE signal is input to the TRK In register.
∑ TCL1
The value obtained by subtracting the TE AVRG value from the TE signal is input to the TRK In register.
∑ VCLC
The value obtained by subtracting the VC AVRG value from the FE signal is input to the FCS In register.
∑ FLC1
The value obtained by subtracting the FE AVRG value from the FE signal is input to the FCS In register.
∑ FLC0
The value obtained by subtracting the FE AVRG value from the FE signal is input to the FZC register.

≠ 83 ≠
CXD2588Q/R
ß5-4. E:F Balance Adjustment Function
When the disc is rotated with the laser on, and with the FCS (focus) servo on via FCS Search (focus search),
the traverse waveform appears in the TE signal due to disc eccentricity.
In this condition, the low-frequency component can be extracted from the TE signal using the built-in TRK hold
filter by setting D5 (TBLM) of $38 to 1.
The extracted low-frequency component is loaded into the TRVSC register as a digital value, and the TRVSC
register value is established when TBLM returns to 0.
Next, setting D2 (TLC2) of $38 to 1 compensates TE and SE values with the TRVSC register value
(subtraction), resulting the E:F balance offset to be adjusted. (See Fig. 5-3.)
ß5-5. FCS Bias (Focus Bias) Adjustment Function
The FBIAS register value can be added to the FCS servo filter input by setting D14 (FBON) of $3A to 1. (See
Fig. 5-3.)
When the FBIAS register value is set when D11 = 0 and D10 = 1 with $34F, data can be written using the 9-bit
value of D9 to D1 (D9: MSB).
In addition, the RF jitter can be monitored by setting the SOCT command of $8 to 1. (See "DSP Block Timing
Chart".)
The FBIAS register can be used as a counter by setting D13 (FBSS) of $3A to 1. The FBIAS register functions
as an up counter when D12 (FBUP) of $3A = 1, and as a down counter when D12 (FBUP) of $3A = 0.
The number of up and down steps can be changed by setting D11 and D10 (FBV1 and FBV0) of $3A.
When using the FBIAS register as a counter, the counter stops if the FBIAS value and the value set
beforehand in FBL9 to 1 of $34 matches. Also, if the upper 8 bits of the command register are $3A at this time,
SENS becomes high and the counter stop can be monitored.
A
B
C
FBIAS setting value (FB9 to 1)
LIMIT value (FBL9 to 1)
SENS pin
A: Register mode
B: Counter mode
C: Counter mode (when stopped)
Here, assume the FBIAS setting value FB9 to 1
and the FBIAS LIMIT value FBL9 to 1 like status
A. For example, if command registers FBUP = 0,
FBV1 = 0, FBV0 = 0 and FBSS = 1 are set from
this status, down count starts from status A and
approaches the set LIMIT value. When the
FBIAS value matches FBL9 to 1, the counter
stops and the SENS pin goes to high. Note that
the up/down counter counts at each sampling
cycle of the focus servo filter. The number of
steps by which the count value changes can be
selected from 1, 2, 4 or 8 steps by FBV1 and
FBV0. When converted to FE input, 1 step
corresponds to 1/512
◊
V
DD
◊
0.4.
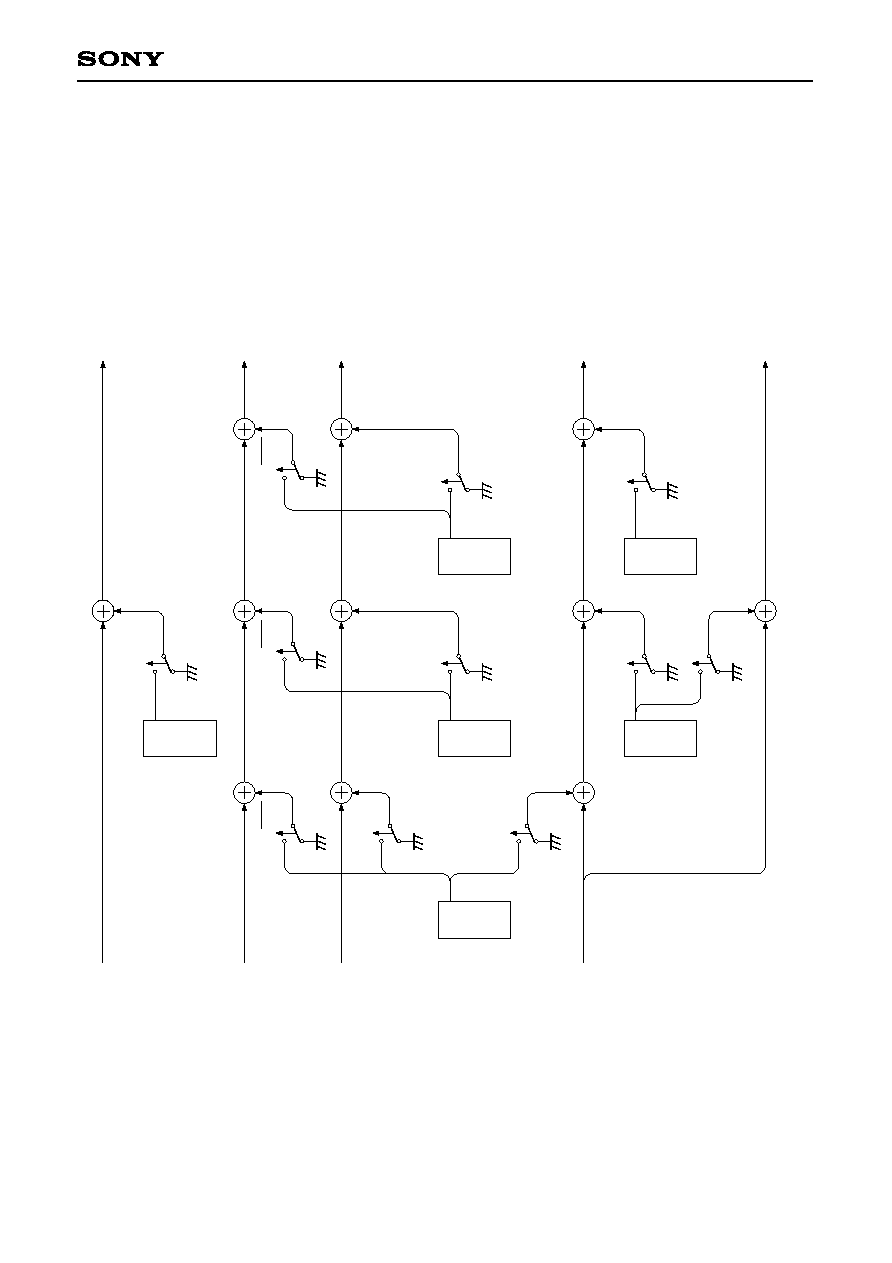
≠ 84 ≠
CXD2588Q/R
T
E
A
V
R
G
r
e
s
i
s
t
e
r
T
L
C
1
T
R
V
S
C
r
e
s
i
s
t
e
r
T
L
C
2
≠
≠
t
o
T
R
K
I
n
r
e
g
i
s
t
e
r
V
C
A
V
R
G
r
e
s
i
s
t
e
r
T
L
C
0
≠
V
C
L
C
≠
T
E
f
r
o
m
A
/
D
F
E
A
V
R
G
r
e
s
i
s
t
e
r
F
L
C
1
F
B
I
A
S
r
e
s
i
s
t
e
r
F
B
O
N
≠
t
o
F
C
S
I
n
r
e
g
i
s
t
e
r
F
L
C
0
t
o
F
Z
C
r
e
g
i
s
t
e
r
F
E
f
r
o
m
A
/
D
≠
R
F
L
C
≠
t
o
R
F
I
n
r
e
g
i
s
t
e
r
R
F
D
C
f
r
o
m
A
/
D
R
F
A
V
R
G
r
e
s
i
s
t
e
r
≠
≠
t
o
S
L
D
I
n
r
e
g
i
s
t
e
r
≠
S
E
f
r
o
m
A
/
D
T
L
C
0
∑
T
L
D
0
T
L
C
1
∑
T
L
D
1
T
L
C
2
∑
T
L
D
2
Fig. 5-3.
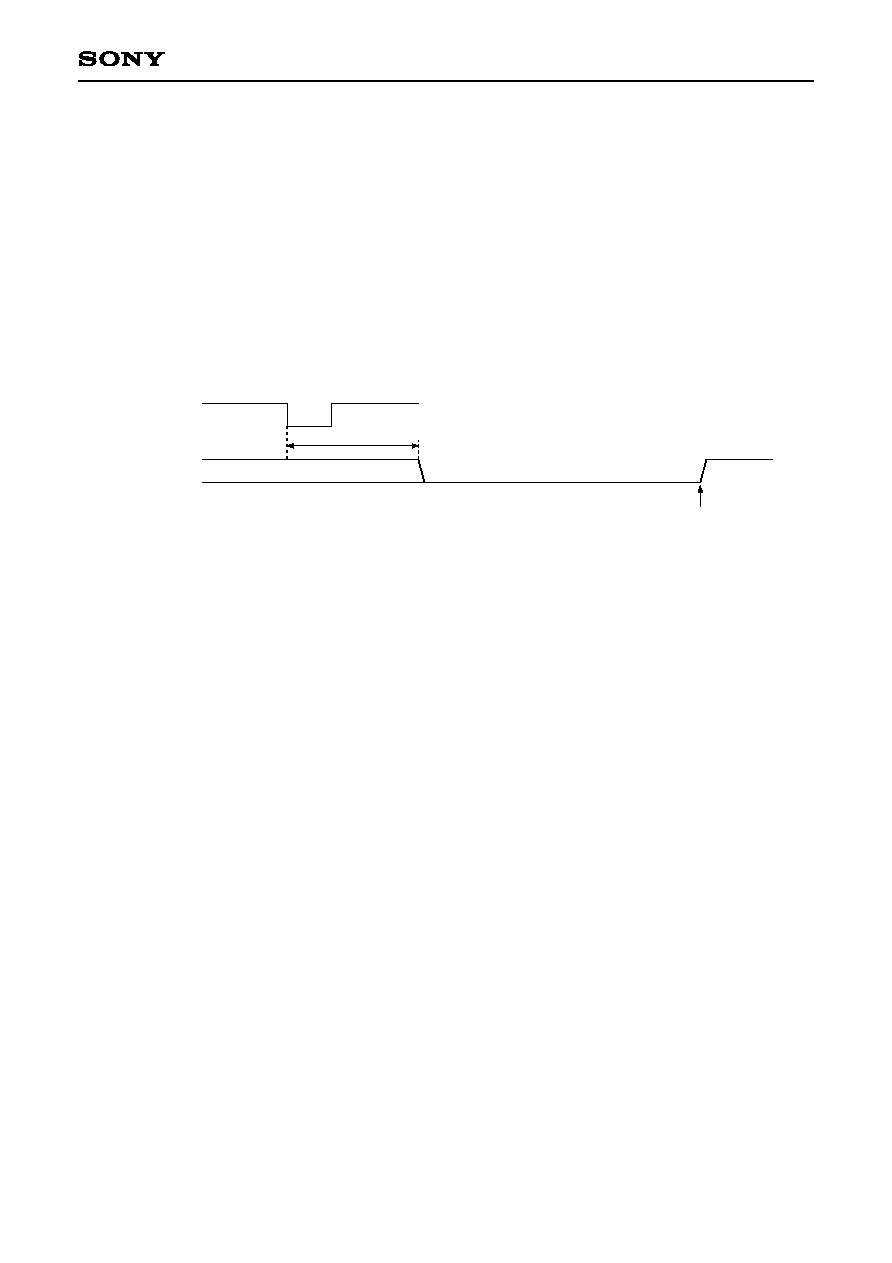
≠ 85 ≠
CXD2588Q/R
ß5-6. AGCNTL (Automatic Gain Control) Function
The AGCNTL function automatically adjusts the filter internal gain in order to obtain the appropriate gain with
the servo loop. AGCNTL not only copes with the sensitivity variation of the actuator and photo diode, etc., but
also obtains the optimal gain for each disc.
The AGCNTL command is sent when each servo is turned on. During AGCNTL operation, if the upper 8 bits of
the command register are 38 (Hex), the completion of AGCNTL operation can be confirmed through the SENS
pin. (See Timing Chart 5-4 and "Description of SENS Signals".)
Setting D9 and D8 of $38 to 1 set FCS (focus) and TRK (tracking) respectively to AGCNTL operation.
Note) During AGCNTL operation, each servo filter gain must be normal, and the anti-shock circuit (described
hereafter) must be disabled.
XLAT
SENS
(= AGOK)
Max. 11.4µs
AGCNTL completion
Timing Chart 5-4.
Coefficient K13 changes for AGF (focus AGCNTL) and coefficients K23 and K07 change for AGT (tracking
AGCNTL) due to AGCNTL.
These coefficients change from 01 to 7F (Hex), and they must also be set within this range when written
externally.
After AGCNTL operation has completed, these coefficient values can be confirmed by reading them out from
the SENS pin with the serial readout function (described hereafter).
AGCNTL related settings
The following settings can be changed with $35, $36 and $37.
FG6 to FG0; AGF convergence gain setting, effective setting range: 00 to 57 (Hex)
TG6 to TG0; AGT convergence gain setting, effective setting range: 00 to 57 (Hex)
AGS;
Self-stop on/off
AGJ;
Convergence completion judgment time
AGGF;
Internally generated sine wave amplitude (AGF)
AGGT;
Internally generated sine wave amplitude (AGT)
AGV1;
AGCNTL sensitivity 1 (during rough adjustment)
AGV2;
AGCNTL sensitivity 2 (during fine adjustment)
AGHS;
Rough adjustment on/off
AGHT;
Fine adjustment time
Note) Converging servo loop gain values can be changed with the FG6 to 0 and TG6 to 0 setting values. In
addition, these setting values must be within the effective setting range. The default settings aim for 0
dB at 1kHz. However, since convergence values vary according to the characteristics of each
constituent element of the servo loop, FG and TG values should be set as necessary.
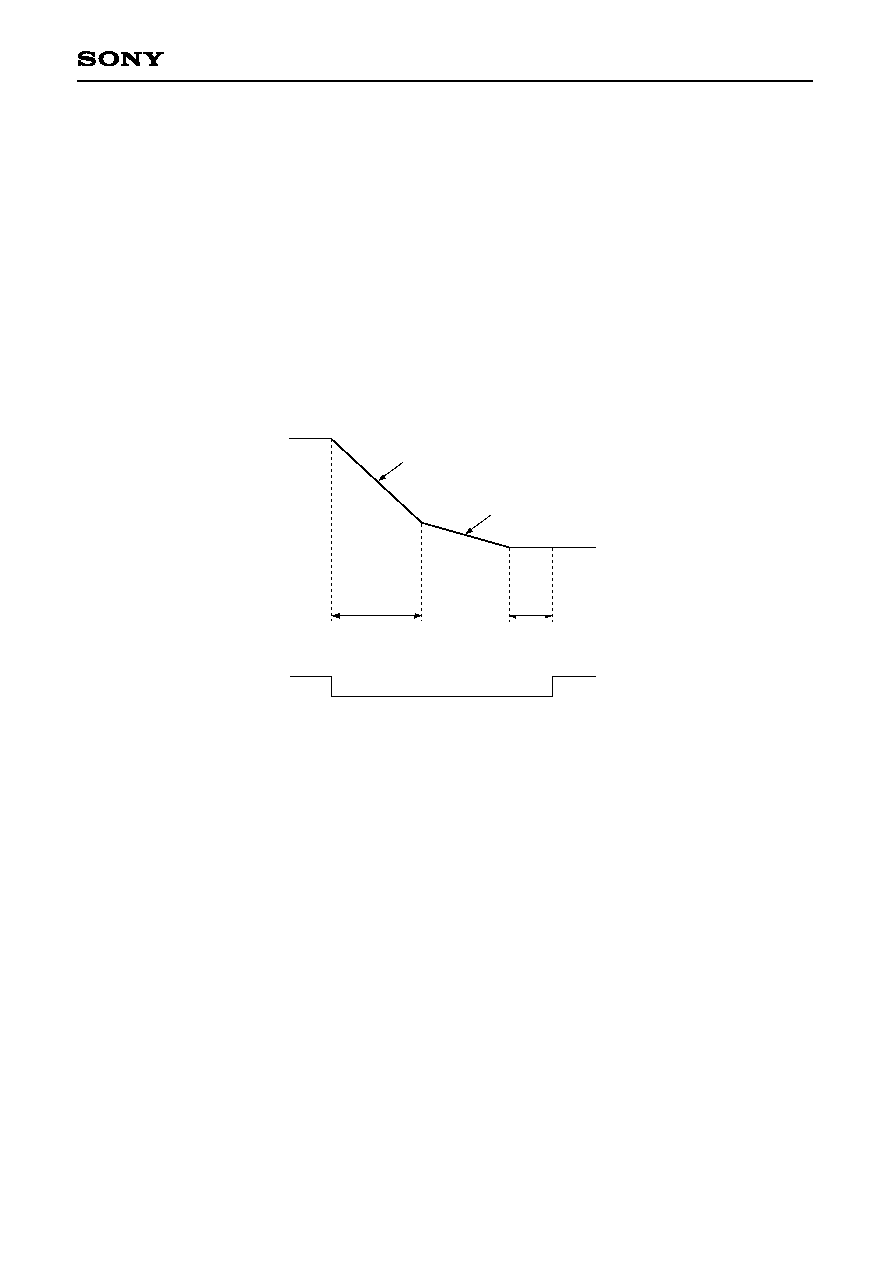
≠ 86 ≠
CXD2588Q/R
AGCNTL and default operation have two stages.
In the first stage, rough adjustment is performed with high sensitivity for a certain period of time (select
256/128ms with AGHT, when MCK = 128Fs), and the AGCNTL coefficient approaches the appropriate value.
The sensitivity at this time can be selected from two types with AGV1.
In the second stage, the AGCNTL coefficient is finely adjusted to approach more appropriate value with
relatively low sensitivity. The sensitivity for the second stage can be selected from two types with AGV2. In the
second stage of default operation, when the AGCNTL coefficient reaches the appropriate value and stops
changing, the CXD2588Q/R confirms that the AGCNTL coefficient has not changed for a certain period of time
(select 63/31ms with AGHJ, when MCK = 128Fs), and then completes AGCNTL operation. (Self-stop mode)
This self-stop mode can be canceled by setting AGS to 0.
In addition, the first stage is omitted for AGCNTL operation when AGHS is set to 0.
An example of AGCNTL coefficient transitions during AGCNTL in various settings are shown in Fig. 5-5.
Initial value
SENS
AGCNTL
Start
AGCNTL
completion
Convergence value
AGCNTL
coefficient value
Slope AGV1
AGHT
AGJ
Slope AGV2
Fig. 5-5.
Note) Fig. 5-5 shows the example where the AGCNTL coefficient value converges to the smaller value from
the initial value.

≠ 87 ≠
CXD2588Q/R
ß5-7. FCS Servo and FCS Search (Focus Search)
The FCS servo is controlled by the 8-bit serial command $0X. (See Table 5-6.)
Register name Command
D23 to D20
D19 to D16
1 0
1 1
0
0
0
1
0
1 0
0
1 1
FOCUS SERVO ON (FOCUS GAIN NORMAL)
FOCUS SERVO ON (FOCUS GAIN DOWN)
FOCUS SERVO OFF, 0V OUT
FOCUS SERVO OFF, FOCUS SEARCH VOLTAGE OUT
FOCUS SEARCH VOLTAGE DOWN
FOCUS SEARCH VOLTAGE UP
0 0 0 0
FOCUS
CONTROL
0
Table 5-6.
FCS Search
FCS search is required in the course of turning on the FCS servo.
Fig. 5-7 shows the signals for sending commands $00
$02
$03 and performing only FCS search operation.
Fig. 5-8 shows the signals for sending $08 (FCS on) after that.
FCSDRV
RF
FOK
FE
FZC
FZC comparator level
$00 $02
$03
0
0
FCSDRV
RF
FOK
FE
FZC
$00 $02
$03
0
$08
Fig. 5-7.
Fig. 5-8.
: Don't care
≠ 88 ≠
CXD2588Q/R
ß5-8. TRK (Tracking) and SLD (Sled) Servo Control
The TRK and SLD servos are controlled by the 8-bit command $2X. (See Table 5-9.)
When the upper 4 bits of the serial data are 2 (Hex), TZC is output to the SENS pin.
D23 to D20
D19 to D16
0 0
0 1
1 0
1 1
0 0
0 1
1 0
1 1
TRACKING SERVO OFF
TRACKING SERVO ON
FORWARD TRACK JUMP
REVERSE TRACK JUMP
SLED SERVO OFF
SLED SERVO ON
FORWARD SLED MOVE
REVERSE SLED MOVE
0 0 1 0
TRACKING
MODE
2
Table 5-9.
TRK Servo
The TRK JUMP (track jump) level can be set with 6 bits (D13 to D8) of $36.
In addition, when the TRK servo is on and D17 of $1 is set to 1, the TRK servo filter switches to gain-up mode.
The filter also switches to gain-up mode when the LOCK signal goes low or when vibration is detected with the
anti-shock circuit (described hereafter) enabled.
CXD2588Q/R has 2 types of filters in TRK gain-up mode which can be selected by setting D16 of $1. (See
Table 5-17.)
SLD Servo
The SLD MOV (sled move) output, composed of a basic value from 6 bits (D13 to D8) of $37, is determined by
multiplying this value by 1
◊
, 2
◊
, 3
◊
or 4
◊
magnification set using D17 and D16 when D18 = D19 = 0 is set with
$3. (See Table 5-10.)
SLD MOV must be performed continuously for 50µs or more. In addition, if the LOCK input signal goes low
when the SLD servo is on, the SLD servo turns off.
Note) When the LOCK signal is low, the TRK servo switches to gain-up mode and the SLD servo is turned off
by the default. These operations are disabled by setting D6 (LKSW) of $38 to 1.
D23 to D20
D19 to D16
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
SLED KICK LEVEL (basic value
◊
±1)
SLED KICK LEVEL (basic value
◊
±2)
SLED KICK LEVEL (basic value
◊
±3)
SLED KICK LEVEL (basic value
◊
±4)
0 0 1 1
SELECT
3
Table 5-10.
: Don't care
Register name Command
Register name Command
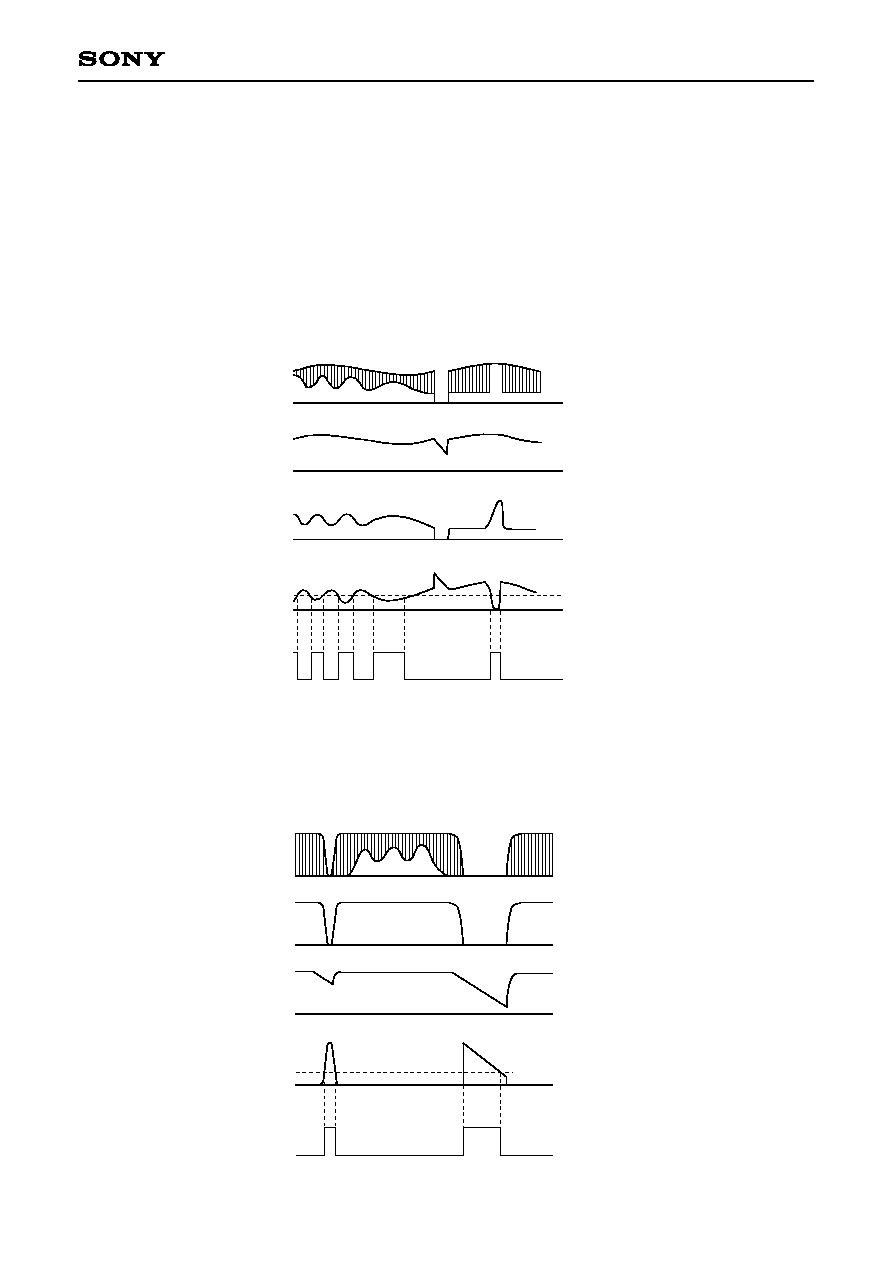
≠ 89 ≠
CXD2588Q/R
ß5-9. MIRR and DFCT Signal Generation
The RF signal obtained from the RFDC pin is sampled at approximately 1.4MHz (when MCK = 128Fs) and
loaded. The MIRR and DFCT signals are generated from this RF signal.
MIRR Signal Generation
The loaded RF signal is applied to peak hold and bottom hold circuits.
An envelope is generated from the waveforms generated in these circuits, and the MIRR comparator level is
generated from the average of this envelope waveform.
The MIRR signal is generated by comparing the waveform generated by subtracting the bottom hold value
from the peak hold value with this MIRR comparator level. (See Fig. 5-11.)
The bottom hold speed and mirror sensitivity can be selected from 4 values using D7 and 6, and D5 and 4,
respectively, of $3C.
RF
Peak Hold
Bottom Hold
Peak Hold
≠ Bottom Hold
MIRR
MIRR Comp
(Mirror comparator level)
H
L
RF
Peak Hold1
Peak Hold2
Peak Hold2
≠ Peak Hold1
DFCT
(Defect comparator level)
H
L
SDF
Fig. 5-11.
DFCT Signal Generation
The loaded RF signal is input to two peak hold circuits with different time constants, and the DFCT signal is
generated by comparing the difference between these two peak hold waveforms with the DFCT comparator
level. (See Fig. 5-12.)
The DFCT comparator level can be selected from four values using D13 and D12 of $3B.
Fig. 5-12.

≠ 90 ≠
CXD2588Q/R
ß5-10. DFCT Countermeasure Circuit
The DFCT countermeasure circuit maintains the directionality of the servo so that the servo does not become
easily dislocated due to scratches or defects on discs.
Specifically, these operations are achieved by detecting scratch and defect with the DFCT signal generation
circuit, and when DFCT goes high, applying the low-frequency component of the error signal before DFCT
went high to the FCS and TRK servo filter inputs. (See Fig. 5-13.)
In addition, these operations are activated by the default. They can be disabled by setting D7 (DFSW) of $38
to 1.
Input register
Hold register
Hold Filter
Servo Filter
EN
Error signal
DFCT
Fig. 5-13.
ß5-11. Anti-Shock Circuit
When vibrations occurs in the CD player, this circuit forces the TRK filter to switch to gain-up mode so that the
servo does not become easily dislocated. This circuit is for systems which require vibration countermeasures.
Concretely, vibrations are detected using an internal anti-shock filter and comparator circuit, and the gain is
increased. (See Fig. 5-14.)
The comparator level is fixed to 1/16 of the maximum comparator input amplitude. However, the comparator
level is practically variable by adjusting the value of the anti-shock filter output coefficient K35.
This function can be turned on and off by D19 of $1 when the brake circuit (described hereafter) is off. (See
Table 5-17.)
This circuit can also support an external vibration detection circuit, and can set the TRK servo filter to gain-up
mode by inputting high level to the ATSK pin.
When the upper 4 bits of the command register are 1 (Hex), vibration detection can be monitored from the
SENS pin. It also can be monitored from the ATSK pin by setting the ASOT command of $3F.
TE
Anti Shock
Filter
TRK Gain Up
Filter
TRK Gain Normal
Filter
TRK
PWM Gen
ATSK
SENS
Comparator
Fig. 5-14.

≠ 91 ≠
CXD2588Q/R
ß5-12. Brake Circuit
Immediately after a long distance track jump it tends to be hard for the actuator to settle and for the servo to
turn on.
The brake circuit prevents these phenomenon.
The brake circuit is to use tracking drive as a brake by cutting unnecessary portions of it utilizing the 180∞
offset in the RF envelope and tracking error phase relationship which occurs when the actuator traverses the
track in the radial direction from the inner track to the outer track and vice versa. (See Figs. 5-15 and 5-16.)
Concretely, this operation is achieved by masking the tracking drive using the TRKCNCL signal generated by
loading the MIRR signal at the edge of the TZC (Tracking Zero Cross) signal.
The brake circuit can be turned on and off by D18 of $1. (See Fig. 5-17.)
TRK
DRV
FWD
JMP
REV
JMP
Servo ON
RF
Trace
MIRR
TE
0
0
TZC
Edge
TRKCNCL
TRK
DRV
SENS
TZC out
Inner track Outer track
TRK
DRV
REV
JMP
FWD
JMP
Servo ON
RF
Trace
MIRR
TE
0
0
TZC
Edge
TRKCNCL
TRK
DRV
SENS
TZC out
Outer track Inner track
Fig. 5-15.
Fig. 5-16.
D23 to D20
D19 to D16
1 0
0
1
0
0
1
1
0
ANTI SHOCK ON
ANTI SHOCK OFF
BRAKE ON
BRAKE OFF
TRACKING GAIN NORMAL
TRACKING GAIN UP
TRACKING GAIN UP FILTER SELECT 1
TRACKING GAIN UP FILTER SELECT 2
0 0 0 1
TRACKING
CONTROL
1
Fig. 5-17.
: Don't care
Register name Command
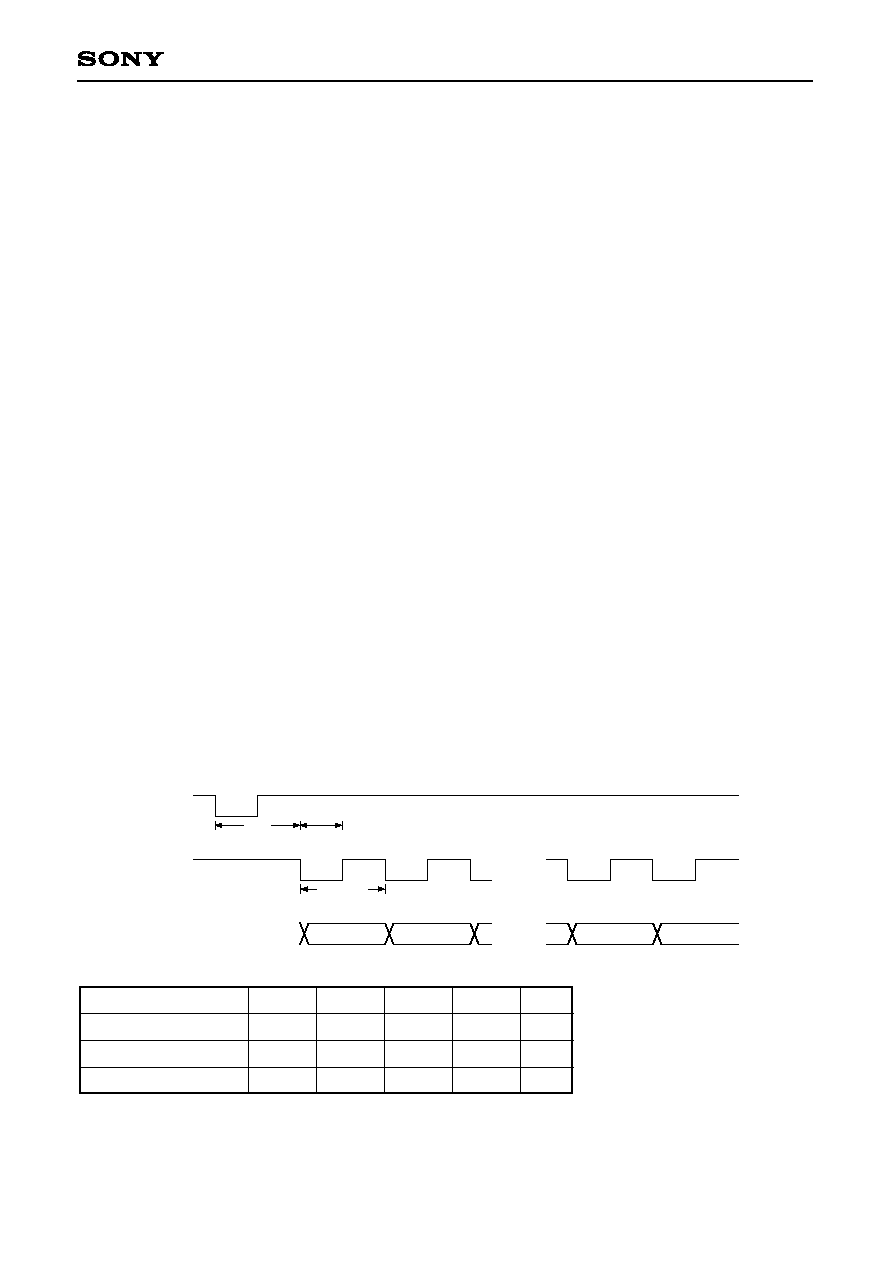
≠ 92 ≠
CXD2588Q/R
ß5-13. COUT Signal
The COUT signal is output to count the number of tracks during traverse, etc. It is basically generated by
loading the MIRR signal at both edges of the TZC signal. And the used TZC signal can be selected among
three different phases for each COUT signal application.
∑ HPTZC: For 1-track jumps
Fast phase COUT signal generation with a fast phase TZC signal. (The TZC phase is advanced by a
cut-off 1kHz digital HPF; when MCK = 128Fs.)
∑ STZC: For COUT signal generation when MIRR is externally input and for applications other than
COUT generation.
This is generated from sampling TE at 700kHz. (when MCK = 128Fs)
∑ DTZC: For high-speed traverse
Reliable COUT signal generation with a delayed phase STZC signal.
Since it takes some time to generate the MIRR signal, it is necessary to delay the TZC signal in accordance
with the MIRR signal delay during high-speed traverse.
The COUT signal output method is switched with D15 and 14 of $3C.
When D15 = 1
: STZC
When D15 = 0 and D14 = 0 : HPTZC
When D15 = 0 and D14 = 1 : DTZC
When the DTZC is selected, the delay can be selected from two values with D14 of $36.
ß5-14. Serial Readout Circuit
The following measurement and adjustment results can be readout from the SENS pin by inputting the readout
clock to the SCLK pin by $39. (See Fig. 5-18, Table 5-19 and "Description of SENS Signals".)
Specified commands
$390C: VC AVRG measurement result
$3908: FE AVRG measurement result
$3904: TE AVRG measurement result
$391F: RF AVRG measurement result
$3953: FCS AGCNTL coefficient result
$3963: TRK AGCNTL coefficient result
$391C: TRVSC adjustment result
$391D: FBIAS register value
∑∑∑
∑∑∑
t
DLS
t
SPW
1/f
SCLK
MSB
LSB
XLAT
SCLK
Serial Readout Data
(SENS)
Item
Symbol
Min.
Typ.
Max.
Unit
SCLK frequency
SCLK pulse width
Delay time
f
SCLK
t
SPW
t
DLS
31.3
15
16
MHz
ns
µs
Table 5-19.
During readout, the upper 8 bits of the command register must be 39 (Hex).
Fig. 5-18.
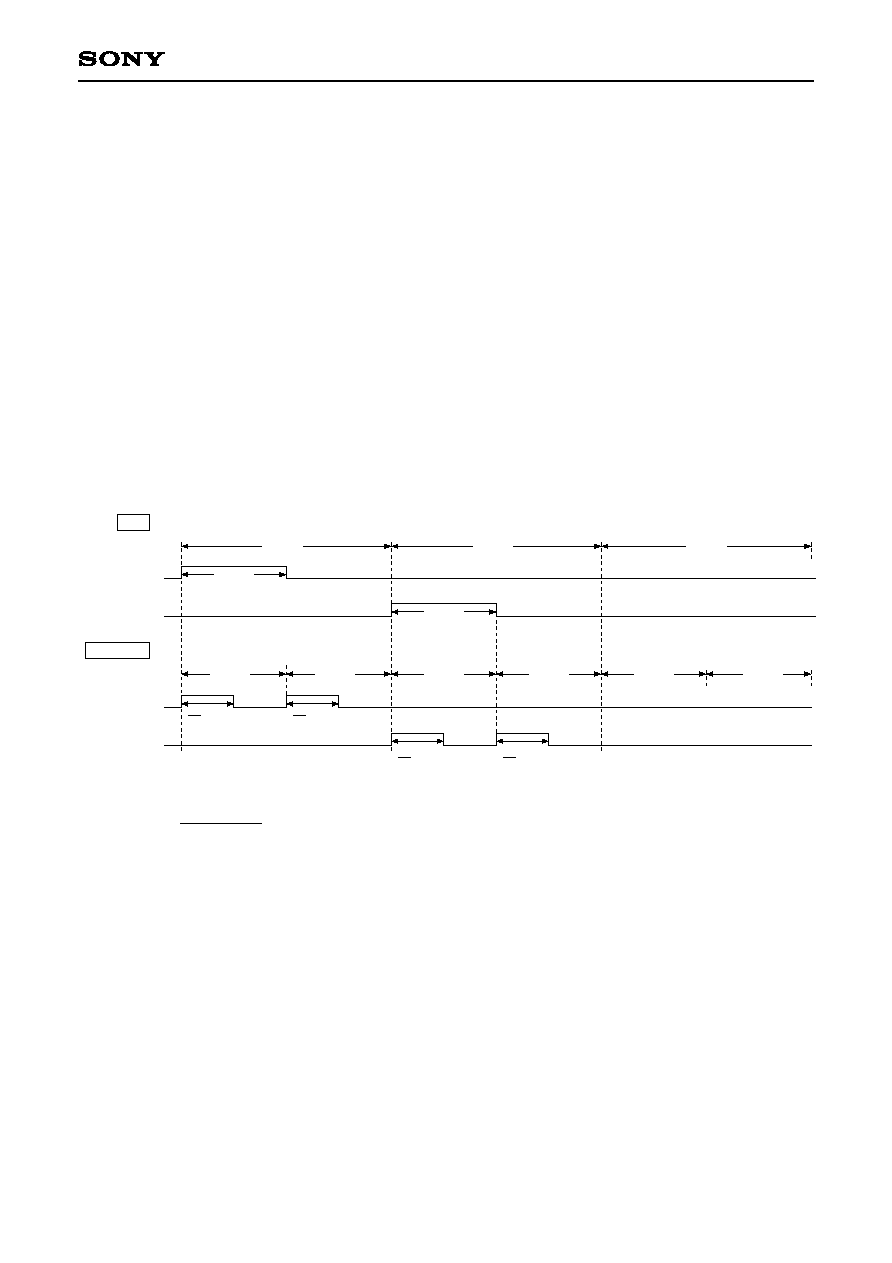
≠ 93 ≠
CXD2588Q/R
ß5-15. Writing to the Coefficient RAM
The coefficient RAM can be rewritten by $34. All coefficients have default values in the built-in ROM, and
transfer from the ROM to the RAM is completed approximately 40µs (when MCK = 128Fs) after the XRST pin
rises. (The coefficient RAM cannot be rewritten during this period.)
After that, the characteristics of each built-in filter can be finely adjusted by rewriting the data for each address
of the coefficient RAM.
The coefficient rewrite command is comprised of 24 bits, with D14 to D8 of $34 as the address (D15 = 0) and
D7 to D0 as data. Coefficient rewriting is completed 11.3µs (when MCK = 128Fs) after the command is
received. When rewriting multiple coefficients, be sure to wait 11.3µs (when MCK = 128Fs) before sending the
next rewrite command.
ß5-16. PWM Output
FCS, TRK and SLD outputs are output as PWM waveforms.
In particular, FCS and TRK permit accurate drive by using a double oversampling noise shaper.
Timing Chart 5-20 and Fig. 5-21 show examples of output waveforms and drive circuits.
t
MCK
=
180ns
Timing Chart 5-20.
64t
MCK
64t
MCK
64t
MCK
At
MCK
At
MCK
SFDR
SRDR
SLD
32t
MCK
32t
MCK
32t
MCK
32t
MCK
32t
MCK
32t
MCK
FCS/TRK
FFDR/
TFDR
FRDR/
TRDR
Output value +A
Output value ≠A
Output value 0
t
MCK
A
2
t
MCK
A
2
t
MCK
A
2
t
MCK
A
2
MCK
(5.6448MHz)
1
5.6448MHz
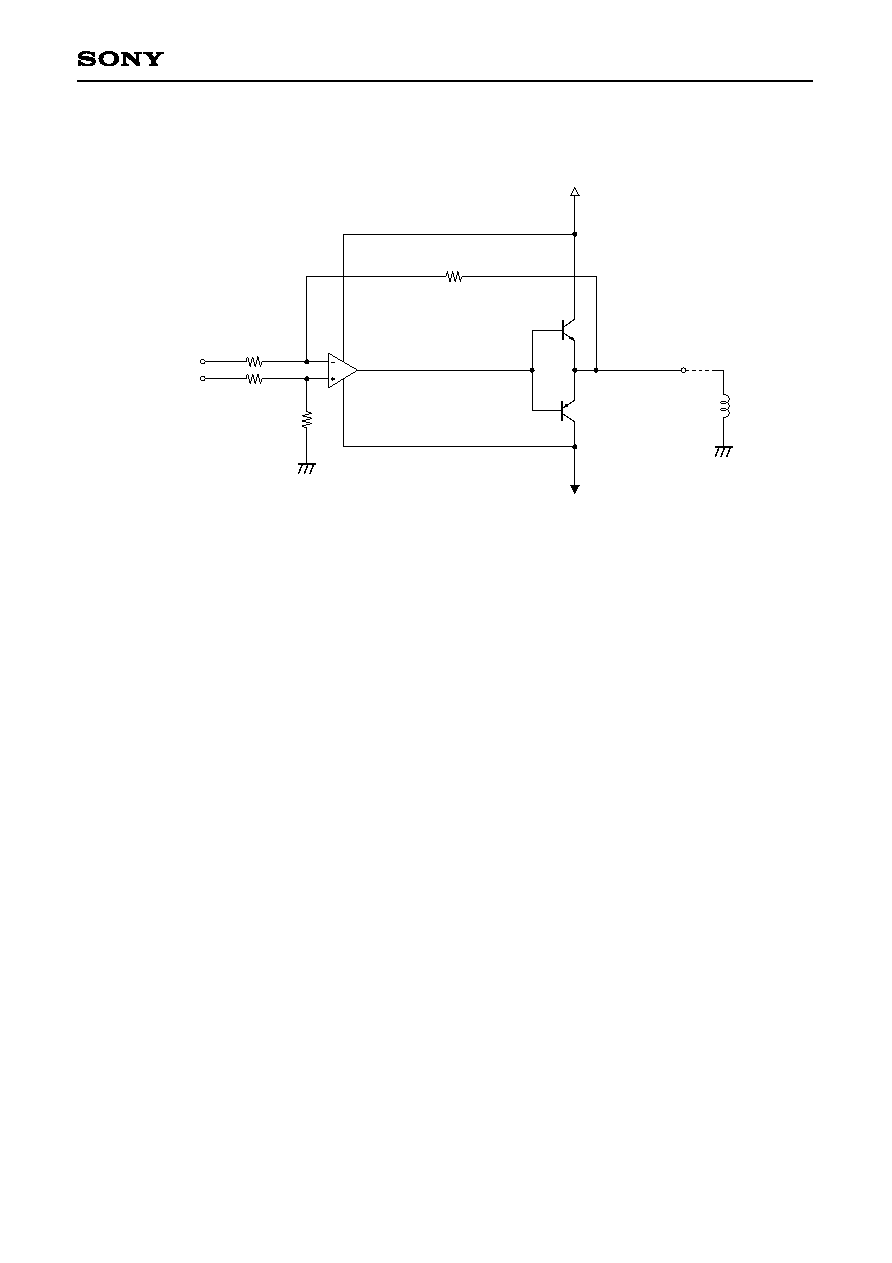
≠ 94 ≠
CXD2588Q/R
Example of Driver Circuit
RDR
FDR
22k
22k
22k
22k
DRV
V
CC
V
EE
Fig. 5-21. Driver Circuit

≠ 95 ≠
CXD2588Q/R
ß5-17. Servo Status Changes Produced by the LOCK Signal
When the LOCK signal becomes low, the TRK servo switches to the gain-up mode and the SLD servo turns off
in order to prevent SLD free-running.
Setting D6 (LKSW) of $38 to 1 deactivates this function.
In other words, neither the TRK servo nor the SLD servo change even when the LOCK signal becomes low.
This enables microcomputer control.
ß5-18. Description of Commands and Data Sets
The following description contains portions which convert internal voltages into the values when they are
output externally and describe them as input conversion or output conversion.
Input conversion converts these voltages into the voltages entering input pins before A/D conversion.
Output conversion converts PWM output values into analog voltage values.

≠ 96 ≠
CXD2588Q/R
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
KA6
KA5
KA4
KA3
KA2
KA1
KA0
KD7
KD6
KD5
KD4
KD3
KD2
KD1
KD0
When D15 = 0
KA6 to KA0: Coefficient address
KD7 to KD0: Coefficient data
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
1
1
1
1
0
1
FB9
FB8
FB7
FB6
FB5
FB4
FB3
FB2
FB1
--
When D15 = D14 = D13 = D12 = 1 ($34F)
D11 = 0, D10 = 1
FBIAS register write
FB9 to FB1: Data; FB9 is MSB two's complement data.
For FE input conversion, FB9 to FB1 = 011111111 corresponds to 255/256
◊
V
DD
/5 and
FB9 to FB1 = 100000000 to ≠256/256
◊
V
DD
/5 respectively. (V
DD
: supply voltage)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
1
1
1
1
1
0
FBL9 FBL8 FBL7 FBL6 FBL5 FBL4 FBL3 FBL2 FBL1
--
When D15 = D14 = D13 = D12 = D11 = 1 ($34F)
D10 = 0
FBIAS LIMIT register write
FBL9 to FBL1: Data; data compared with FB9 to 1, FBL9 = MSB.
When using the FBIAS register in counter mode, counter operation stops when the
value of FB9 to 1 matches with FBL9 to 1.
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
1
1
1
1
0
0
TV9
TV8
TV7
TV6
TV5
TV4
TV3
TV2
TV1
TV0
When D15 = D14 = D13 = D12 = 1 ($34F)
D11 = 0, D10 = 0
TRVSC register write
TV9 to TV0: Data; TV9 is MSB two's complement data.
For TE input conversion, TV9 to TV0 = 0011111111 corresponds to 255/256
◊
V
DD
/5
and TV9 to TV0 = 1100000000 to ≠256/256
◊
V
DD
/5 respectively. (V
DD
: supply voltage)
Note) ∑ When the TRVSC register is readout, the data length is 9 bits. At this time, data corresponding to
each bit TV8 to TV0 during external write are readout.
∑ When reading out internally measured values and then writing these values externally, set TV9 the
same as TV8.
$34
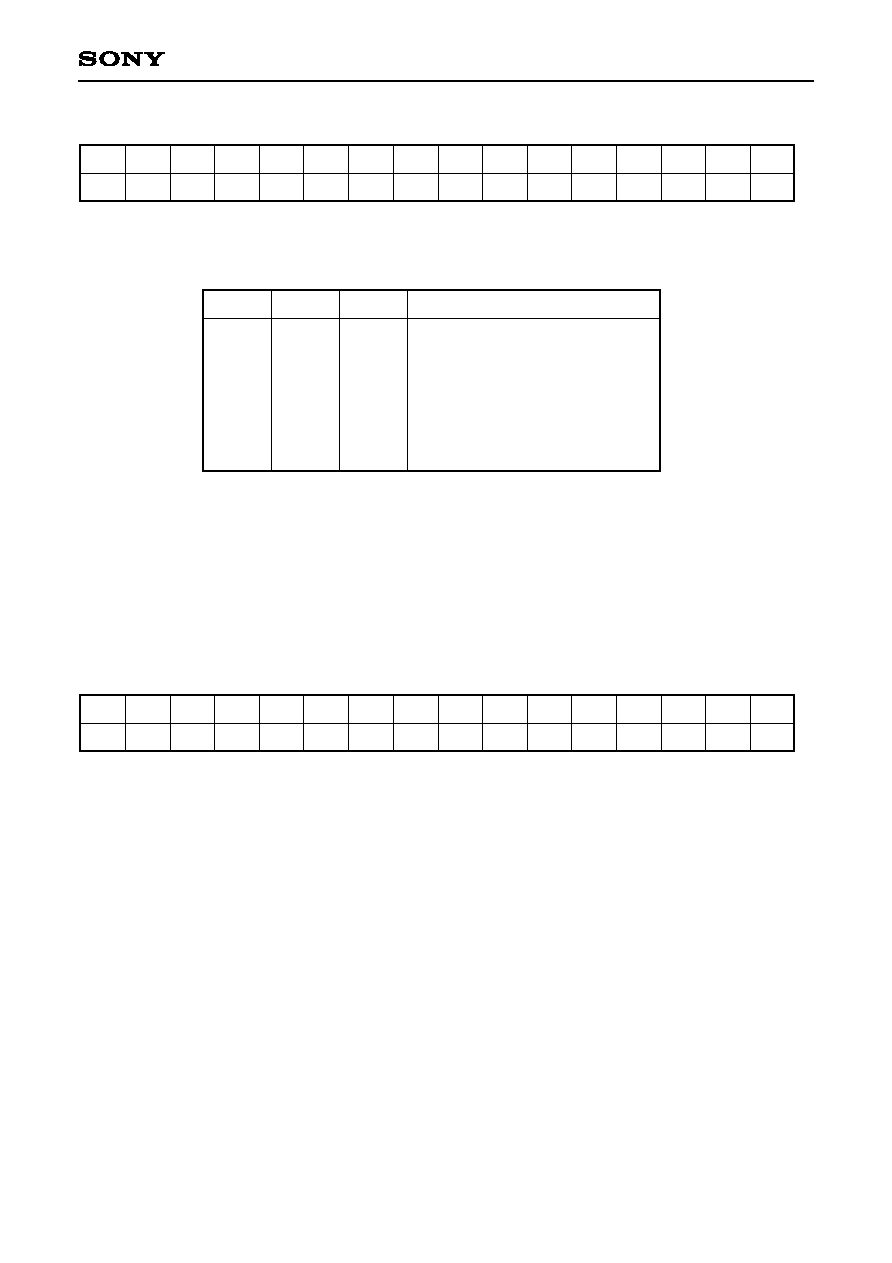
≠ 97 ≠
CXD2588Q/R
$35 (preset: $35 58 2D)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
FT1
FT0
FS5
FS4
FS3
FS2
FS1
FS0
FTZ
FG6
FG5
FG4
FG3
FG2
FG1
FG0
FT1, FT0, FTZ: Focus search-up speed
Default value: 010 (0.673
◊
V
DD
V/s)
Focus drive output conversion
FT1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
0
0
0
1
1
1
1
1.35
◊
V
DD
0.673
◊
V
DD
0.449
◊
V
DD
0.336
◊
V
DD
1.79
◊
V
DD
1.08
◊
V
DD
0.897
◊
V
DD
0.769
◊
V
DD
FT0
FTZ
Focus search speed [V/s]
FS5 to FS0:
Focus search limit voltage
Default value: 011000 (±24/64
◊
V
DD
, V
DD
: PWM driver supply voltage)
Focus drive output conversion
FG6 to FG0: AGF convergence gain setting value
Default value: 0101101
$36 (preset: $36 0E 2E)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
TDZC DTZC TJ5
TJ4
TJ3
TJ2
TJ1
TJ0 SFJP TG6
TG5
TG4
TG3
TG2
TG1
TG0
TDZC:
Selects the TZC signal for generating the TRKCNCL signal during brake circuit operation.
TDZC = 0: the edge of the HPTZC or STZC signal, whichever has the faster phase, is used.
TDZC = 1: the edge of the HPTZC or STZC signal or the tracking drive signal zero-cross,
whichever has the faster phase, is used. (See ß5-12.)
DTZC:
DTZC delay (8.5/4.25µs, when MCK = 128Fs)
Default value: 0 (4.25µs)
TJ5 to TJ0:
Track jump voltage
Default value: 001110 (
±14/64
◊
V
DD
, V
DD
: PWM driver supply voltage)
Tracking drive output conversion
SFJP:
Surf jump mode on/off
The tracking PWM output is made by adding the tracking filter output and TJReg (TJ5 to 0), by
setting D7 to 1 (on)
TG6 to TG0:
AGT convergence gain setting value
Default value: 0101110
: preset, V
DD
: PWM driver supply voltage
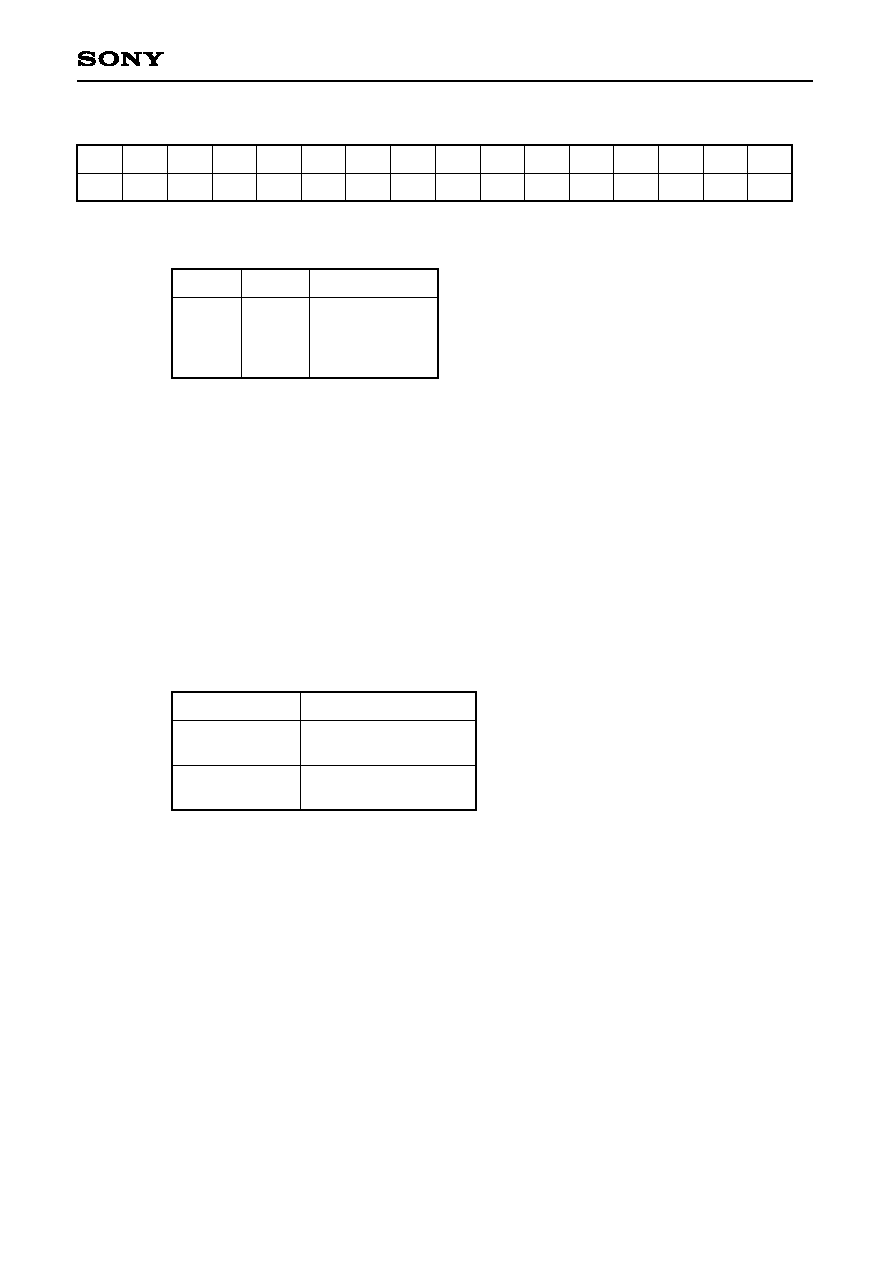
≠ 98 ≠
CXD2588Q/R
$37 (preset: $37 50 BA)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
FZSH FZSL SM5 SM4 SM3 SM2 SM1 SM0 AGS
AGJ AGGF AGGT AGV1 AGV2 AGHS AGHT
FZSH, FZSL: FZC (Focus Zero Cross) slice level
Default value: 01 (1/8
◊
V
DD
◊
0.4, V
DD
: supply voltage); FE input conversion
FZSH
0
0
1
1
0
1
0
1
1/4
◊
V
DD
◊
0.4
1/8
◊
V
DD
◊
0.4
1/16
◊
V
DD
◊
0.4
1/32
◊
V
DD
◊
0.4
FZSL
Slice level
SM5 to SM0: Sled move voltage
Default value: 010000 (
±16/64
◊
V
DD
, V
DD
: PWM driver supply voltage)
Sled drive output conversion
AGS:
AGCNTL self-stop on/off
Default value: 1 (on)
AGJ:
AGCNTL convergence completion judgment time during low sensitivity adjustment (31/63ms,
when MCK = 128Fs)
Default value: 0 (63ms)
AGGF:
Focus AGCNTL internally generated sine wave amplitude (small/large)
Default value: 1 (large)
AGGT:
Tracking AGCNTL internally generated sine wave amplitude (small/large)
Default value: 1 (large)
AGGF
0 (small)
1 (large)
1/32
◊
V
DD
◊
0.4
1/16
◊
V
DD
◊
0.4
1/16
◊
V
DD
◊
0.4
1/8
◊
V
DD
◊
0.4
AGGT
0 (small)
1 (large)
FE/TE input conversion
AGV1:
AGCNTL convergence sensitivity during high sensitivity adjustment; high/low
Default value: 1 (high)
AGV2:
AGCNTL convergence sensitivity during low sensitivity adjustment; high/low
Default value: 0 (low)
AGHS:
AGCNTL high sensitivity adjustment on/off
Default value: 1 (on)
AGHT:
AGCNTL high sensitivity adjustment time (128/256ms, when MCK = 128Fs)
Default value: 0 (256ms)
: preset
: preset

≠ 99 ≠
CXD2588Q/R
$38 (preset: $38 00 00)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
VCLM VCLC FLM FLC0 RFLM RFLC AGF AGT DFSW LKSW TBLM TCLM FLC1 TLC2 TLC1 TLC0
VCLM: VC level measurement (on/off)
VCLC: VC level compensation for FCS In register (on/off)
FLM:
Focus zero level measurement (on/off)
FLC0:
Focus zero level compensation for FZC register (on/off)
RFLM: RF zero level measurement (on/off)
RFLC: RF zero level compensation (on/off)
AGF:
Focus auto gain adjustment (on/off)
AGT:
Tracking auto gain adjustment (on/off)
DFSW: Defect disable switch (on/off)
Setting this switch to 1 (on) disables the defect countermeasure circuit.
LKSW: Lock switch (on/off)
Setting this switch to 1 (on) disables the sled free-running prevention circuit.
TBLM: Traverse center measurement (on/off)
TCLM: Tracking zero level measurement (on/off)
FLC1:
Focus zero level compensation for FCS In register (on/off)
TLC2:
Traverse center compensation (on/off)
TLC1:
Tracking zero level compensation (on/off)
TLC0:
VC level compensation for TRK/SLD In register (on/off)
Note) Commands marked with are accepted every 2.9ms. (when MCK = 128Fs)
All commands are on when set to 1.
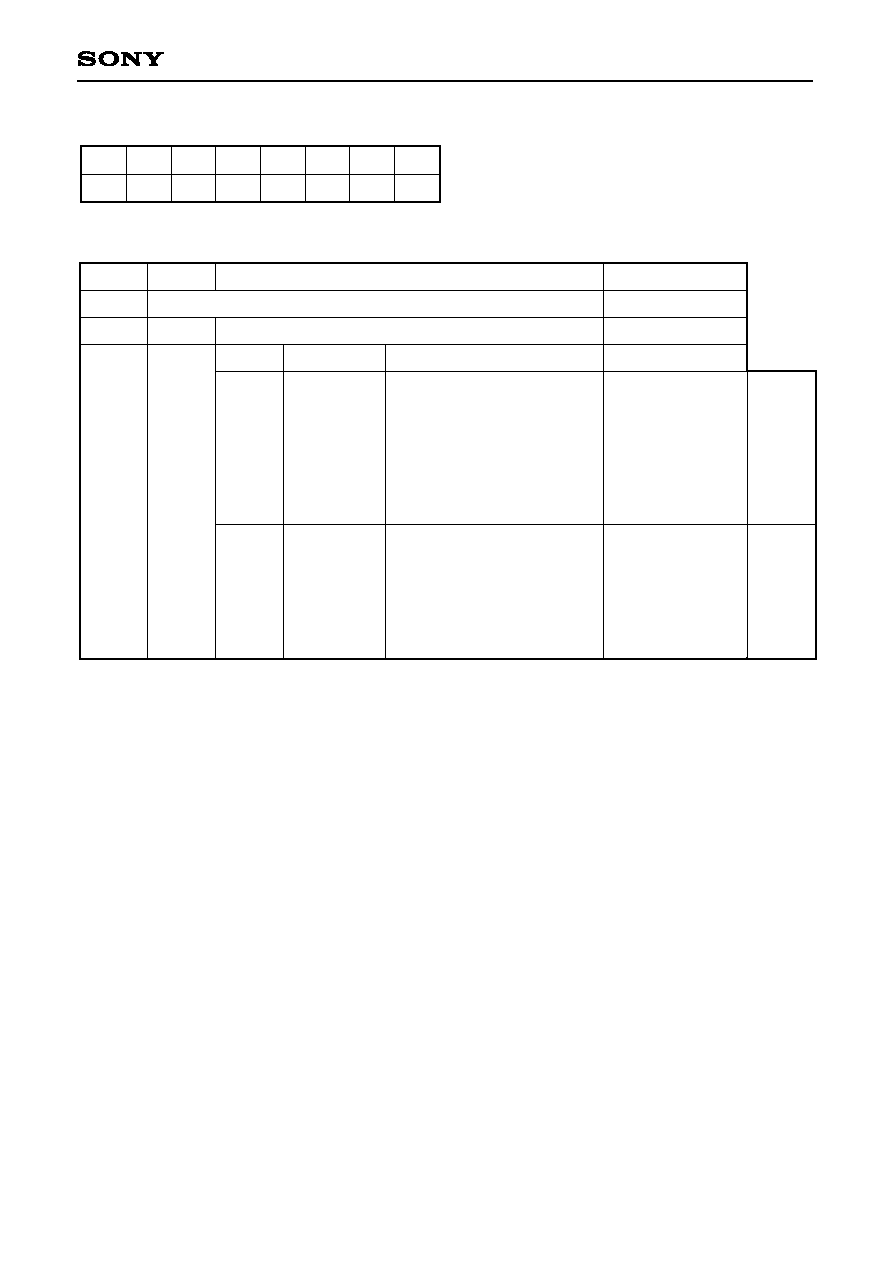
≠ 100 ≠
CXD2588Q/R
SD6
1
0
0
1
0
Data RAM data for address = SD4 to SD0
Coefficient RAM data for address = SD5 to SD0
SD4
1
0
SD3 to SD0
1 1 1 1
1 1 1 0
1 1 0 1
1 1 0 0
0 0 1 1
0 0 1 0
0 0 0 1
1 1
1 0
0 1
0 0 1 1
0 0 1 0
0 0 0 1
0 0 0 0
RF AVRG register
RFDC input signal
FBIAS register
TRVSC register
RFDC envelope (bottom)
RFDC envelope (peak)
RFDC envelope
(peak) ≠ (bottom)
VC AVRG register
FE AVRG register
TE AVRG register
FE input signal
TE input signal
SE input signal
VC input signal
8 bits
8 bits
9 bits
9 bits
8 bits
8 bits
8 bits
9 bits
9 bits
9 bits
8 bits
8 bits
8 bits
8 bits
$399F
$399E
$399D
$399C
$3993
$3992
$3991
$398C
$3988
$3984
$3983
$3982
$3981
$3980
8 bits
16 bits
SD5
Readout data
Readout data length
Note) Coefficients K40 to K4F cannot be readout.
: Don't care
See the description for SRO1 of $3F concerning readout methods for the above data.
D15
D14
D13
D12
D11
D10
D9
D8
DAC
SD6
SD5
SD4
SD3
SD2
SD1
SD0
DAC:
Serial data readout DAC mode (on/off)
SD6 to SD0: Serial readout data select
$39
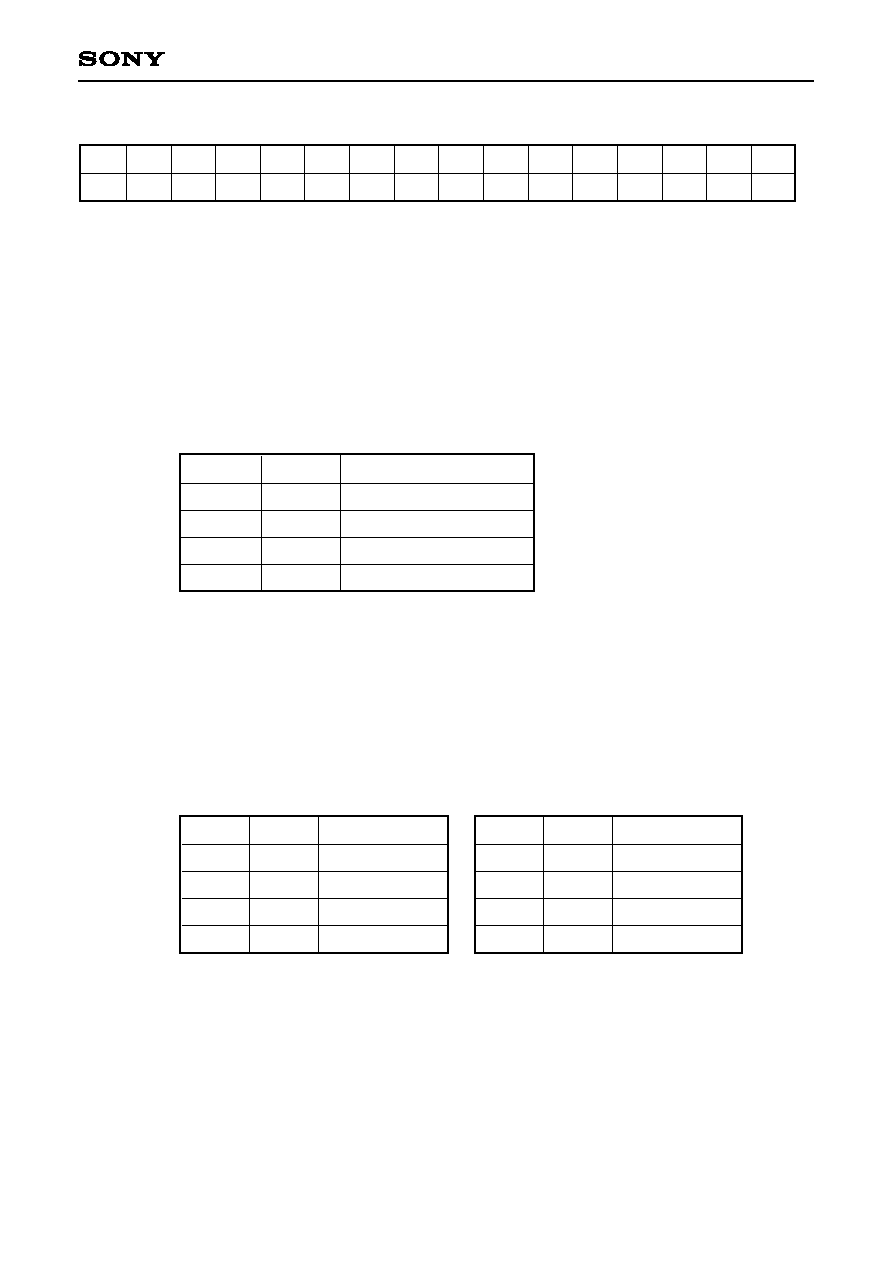
≠ 101 ≠
CXD2588Q/R
$3A (preset: $3A 00 00)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
FBON FBSS FBUP FBV1 FBV0
0
TJD0 FPS1 FPS0 TPS1 TPS0
0
SJHD INBK MTI0
FBON:
FBIAS (focus bias) register addition (on/off)
The FBIAS register value is added to the signal loaded into the FCS In register by FBON = 1
(on).
FBSS:
FBIAS (focus bias) register/counter switching
FBSS = 0: register, FBSS = 1: counter.
FBUP:
FBIAS (focus bias) counter up/down operation switching
This performs counter up/down control when FBSS = 1. FBUP = 0: down counter,
FBUP = 1: up counter.
FBV1, FBV0:
FBIAS (focus bias) counter voltage switching
The number of FCS BIAS count-up/-down steps per cycle is decided by these bits.
TJD0:
This sets the tracking servo filter data RAM to 0 when switched from track jump to servo on
only when SFJP = 1 (during surf jump operation).
FPS1, FPS0:
Gain setting when transferring data from the focus filter to the PWM block.
TPS1, TPS0:
Gain setting when transferring data from the tracking filter to the PWM block.
This is effective for increasing the overall gain in order to widen the servo band.
Operation when FPS1, FPS0 (TPS1, TPS0) = 00 is the same as usual (7-bit shift). However,
6dB, 12dB and 18dB can be selected independently for focus and tracking by setting the
relative gain to 0dB when FPS1, FPS0 (TPS1, TPS0) = 00.
SJHD:
This holds the tracking filter output at the value when surf jump starts during surf jump.
INBK:
When INBK = 0 (off), the brake circuit masks the tracking drive signal with TRKCNCL which is
generated by taking the MIRR signal at the TZC edge. When INBK = 1 (on), the tracking filter
input is masked instead of the drive output.
MTI0:
The tracking filter input is masked when the MIRR signal is high by setting MTI0 = 1 (on).
The counter changes once for each
sampling cycle of the focus servo filter.
When MCK is 128Fs, the sampling
frequency is 88.2kHz. When converted
to FE input, 1 step is approximately 1/2
9
◊
V
DD
◊
0.4, V
DD
= supply voltage.
FBV1
0
0
1
1
0
1
0
1
1
2
4
8
FBV0
Number of steps per cycle
FPS1
0
0
1
1
FPS0
0
1
0
1
0dB
+6dB
+12dB
+18dB
Relative gain
TPS1
0
0
1
1
TPS0
0
1
0
1
0dB
+6dB
+12dB
+18dB
Relative gain
: preset
: preset

≠ 102 ≠
CXD2588Q/R
$3B (preset: $3B E0 50)
SFOX, SFO2, SFO1: FOK slice level
Default value: 011 (28/256
◊
V
DD
◊
0.57, V
DD
= supply voltage)
RFDC input conversion
SFOX
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
16/256
◊
V
DD
◊
0.57
20/256
◊
V
DD
◊
0.57
24/256
◊
V
DD
◊
0.57
28/256
◊
V
DD
◊
0.57
32/256
◊
V
DD
◊
0.57
40/256
◊
V
DD
◊
0.57
48/256
◊
V
DD
◊
0.57
50/256
◊
V
DD
◊
0.57
SFO2
0
1
0
1
0
1
0
1
SFO1
Slice level
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
SFO2 SFO1 SDF2 SDF1 MAX2 MAX1 SFOX BTF D2V2 D2V1 D1V2 D1V1 RINT
0
0
0
: preset
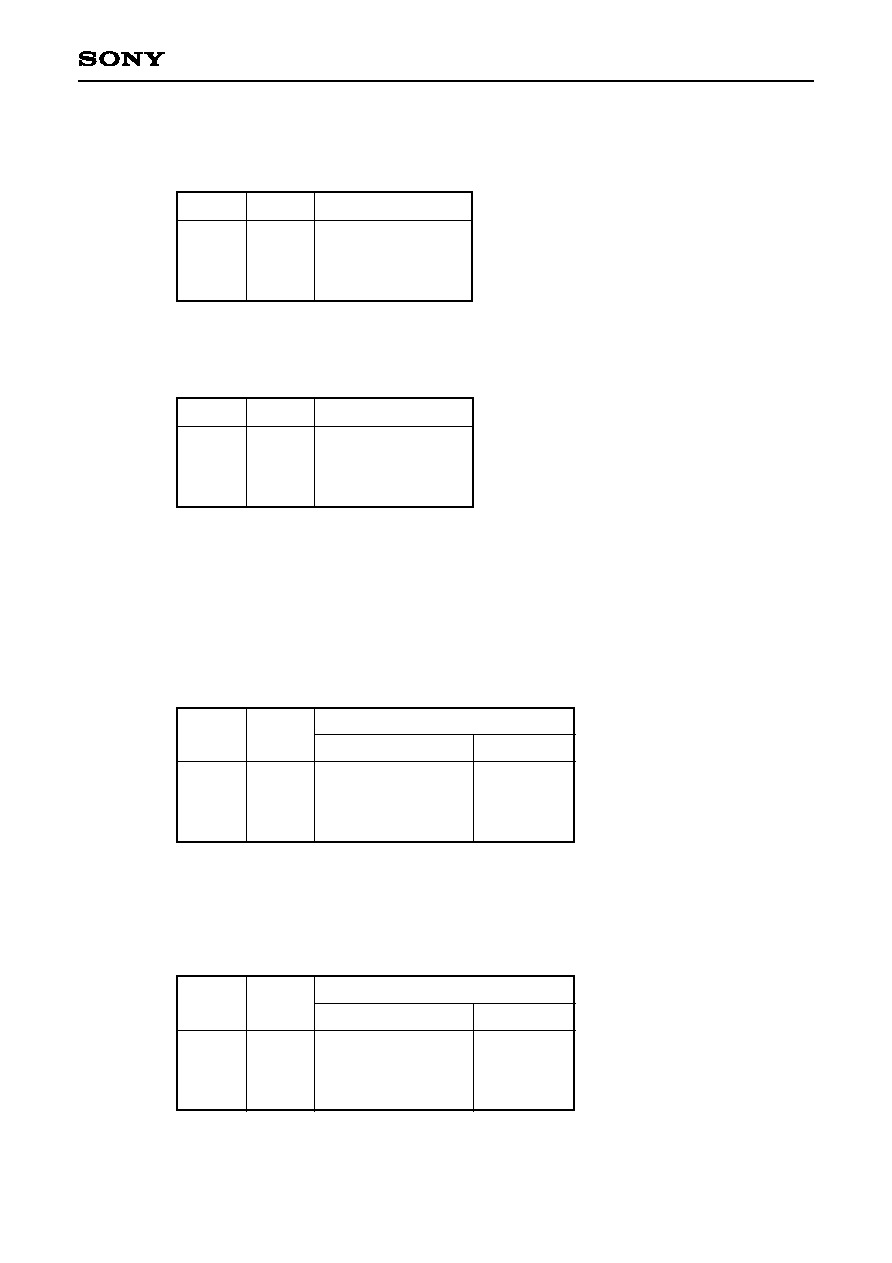
≠ 103 ≠
CXD2588Q/R
SDF2, SDF1: DFCT slice level
Default value: 10 (0.0313
◊
V
DD
◊
1.14V)
RFDC input conversion
SDF2
0
0
1
1
0
1
0
1
0.0156
◊
V
DD
◊
1.14
0.0234
◊
V
DD
◊
1.14
0.0313
◊
V
DD
◊
1.14
0.0391
◊
V
DD
◊
1.14
SDF1
Slice level
MAX2, MAX1: DFCT maximum time (MCK = 128Fs)
Default value: 00 (no timer limit)
MAX2
0
0
1
1
0
1
0
1
No timer limit
2.00ms
2.36
2.72
MAX1
DFCT maximum time
BTF:
Bottom hold double-speed count-up mode for MIRR signal generation
On/off (default: off)
On when set to 1.
D2V2, D2V1:
Peak hold 2 for DFCT signal generation
Count-down speed setting
Default value: 01 (0.086
◊
V
DD
◊
1.14V/ms, 44.1kHz)
[V/ms] unit items indicate RFDC input conversion; [kHz] unit items indicate the
operating frequency of the internal counter.
D1V2, D1V1:
Peak hold 1 for DFCT signal generation
Count-down speed setting
Default value: 01 (0.688
◊
V
DD
◊
1.14V/ms, 352.8kHz)
[V/ms] unit items indicate RFDC input conversion; [kHz] unit items indicate the
operating frequency of the internal counter.
RINT:
This initializes the initial-state registers of the circuits which generate MIRR, DFCT and FOK.
D2V2
0
0
1
1
0
1
0
1
22.05
44.1
88.2
176.4
0.0431
◊
V
DD
◊
1.14
0.0861
◊
V
DD
◊
1.14
0.172
◊
V
DD
◊
1.14
0.344
◊
V
DD
◊
1.14
D2V1
Count-down speed
[V/ms]
[kHz]
: preset, V
DD
: supply voltage
D2V2
0
0
1
1
0
1
0
1
176.4
352.8
705.6
1411.2
0.344
◊
V
DD
◊
1.14
0.688
◊
V
DD
◊
1.14
1.38
◊
V
DD
◊
1.14
2.75
◊
V
DD
◊
1.14
D2V1
Count-down speed
[V/ms]
[kHz]
: preset, V
DD
: supply voltage
: preset, V
DD
: supply voltage
: preset
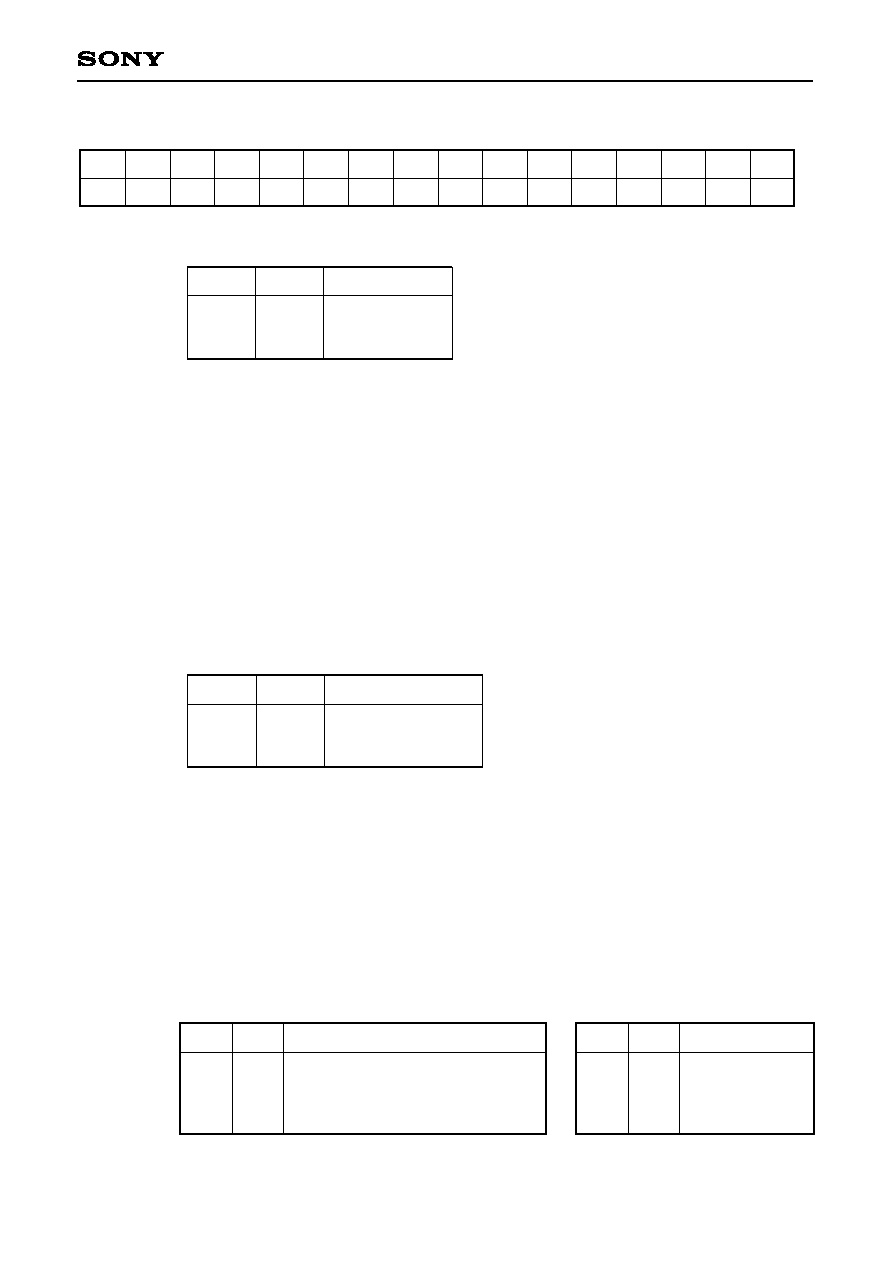
≠ 104 ≠
CXD2588Q/R
$3C (preset: $3C 00 80)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
COSS COTS CETZ CETF COT2 COT1 MOT2
0
BTS1 BTS0 MRC1 MRC0
0
0
0
0
COSS, COTS: These select the TZC signal used when generating the COUT signal.
Preset = HPTZC.
STZC is the TZC generated by sampling the TE signal at 700kHz. (when MCK = 128Fs)
DTZC is the delayed phase STZC. (The delay amount can be selected by D14 of $36.)
HPTZC is the fast phase TZC passed through a HPF with a cut-off frequency of 1kHz.
See ß5-13.
CETZ:
The input from the TE pin normally enters the TRK filter and is used to generate the TZC
signal. However, the input from the CE pin can also be used. This function is for the center
error servo.
When CETZ = 0, the TZC signal is generated by using the TE input signal.
When CETZ = 1, the TZC signal is generated by using the CE input signal.
CETF:
When CETF = 0, the signal input to the TE pin is input to the TRK servo filter.
When CETF = 1, the signal input to the CE pin is input to the TRK servo filter.
These commands output the TZC signal.
COT2, COT1: This outputs the TZC signal from the COUT pin.
COSS
1
0
0
--
0
1
STZC
HPTZC
DTZC
COTS
TZC
: preset, --: don't care
BTS1
0
0
1
1
0
1
0
1
1
2
4
8
BTS0
Number of count-up steps per cycle
MRC1
0
0
1
1
0
1
0
1
5.669
11.338
22.675
45.351
MRC0
Setting time [µs]
: preset (when MCK = 128Fs)
MOT2:
The STZC signal is output from the MIRR pin by setting MOT2 to 1.
These commands set the MIRR signal generation circuit.
BTS1, BTS0:
This sets the count-up speed for the bottom hold value of the MIRR generation circuit.
The time per step is approximately 708 ns (when MCK = 128Fs). The preset value is BTS1 = 1,
BTS0 = 0. However, this is valid only when BTF of $3B is 0.
MRC1, MRC0: This sets the minimum pulse width for masking the MIRR signal of the MIRR generation circuit.
As noted in ß5-9, the MIRR signal is generated by comparing the waveform obtained by
subtracting the bottom hold value from the peak hold value with the MIRR comparator level.
Strictly speaking, however, for MIRR to become high, these levels must be compared
continuously for a certain time. This sets that time.
The preset value is MRC1 = 0, MRC0 = 0.
COT2
1
0
0
--
1
0
STZC
HPTZC
COUT
COT1
COUT pin output
: preset, --: don't care
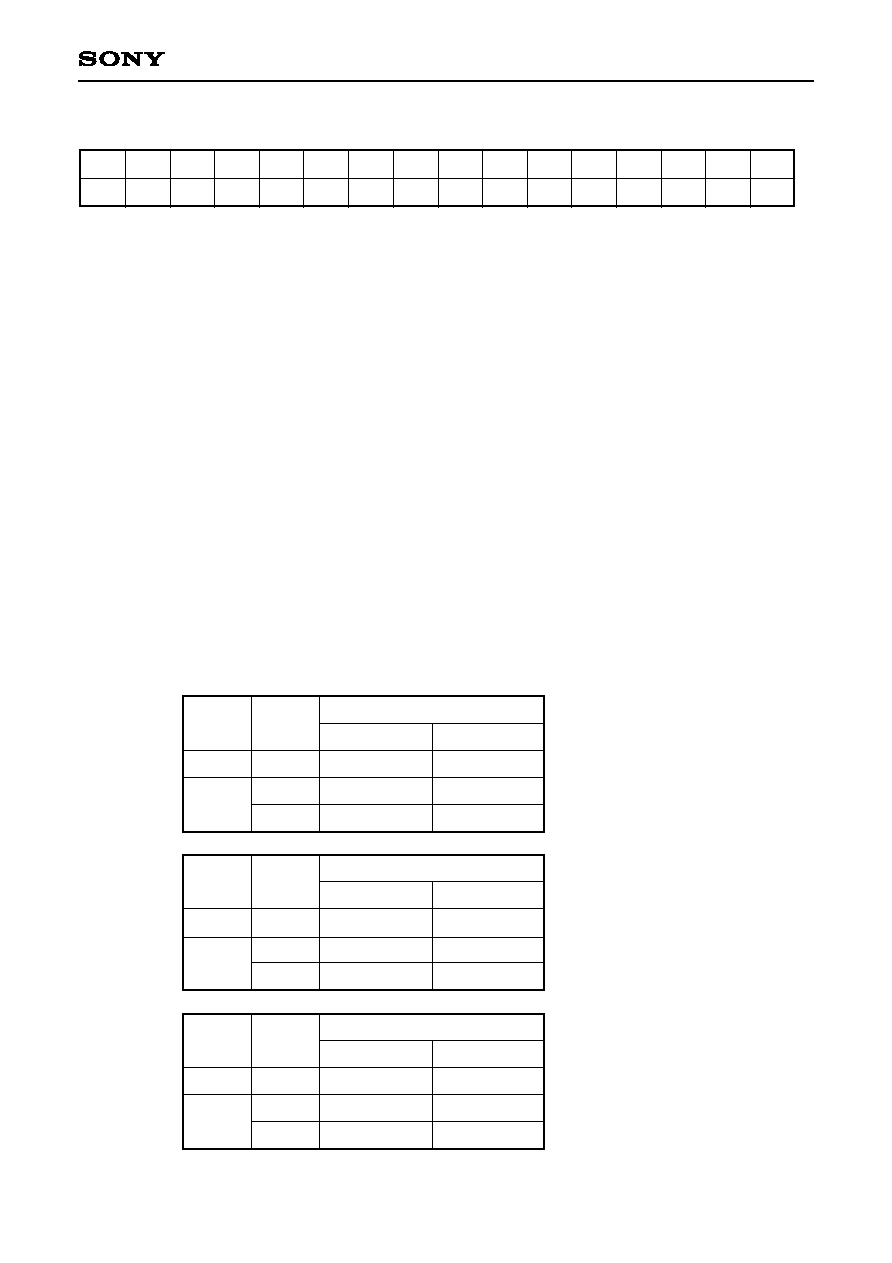
≠ 105 ≠
CXD2588Q/R
$3D (preset: $3D 00 00)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
SFID SFSK THID THSK
0
TLD2 TLD1 TLD0
0
0
0
0
0
0
0
0
SFID:
SLED servo filter input can be obtained not from SLD in Reg, but from M0D, which is the TRK
filter second-stage output.
When the low-frequency component of the tracking error signal obtained from the RF amplifier
is attenuated, the low frequency can be amplified and input to the SLD servo filter.
SFSK:
Only during TRK servo gain up2 operation, coefficient K30 is used instead of K00. Normally
the DC gain between the TE input pin and M0D changes for TRK filter gain normal and gain
up2, and error occurs in the DC level at M0D. In this case, the DC level of the signal
transmitted to M00 can be kept uniform by adjusting the K30 value even during the above
switching.
THID:
TRK hold filter input can be obtained not from SLD in Reg, but from M0D, which is the TRK
filter second-stage output.
When signals other than the tracking error signal from the RF amplifier are input to the SE input
pin, the signal transmitted from the TE pin can be obtained as TRK hold filter input.
THSK:
Only during TRK servo gain up2 operation, coefficient K46 is used instead of K40. Normally
the DC gain between the TE input pin and M0D changes for TRK filter gain normal and gain up
2, and error occurs in the DC level at M0D. In this case, the DC level of the signal transmitted
to M18 can be kept uniform by adjusting the K46 value even during the above switching.
Please refer to ß 5-21. Filter Composition, for further information on SFID, SFSK, THID and
THSK commands.
TLD0 to 2:
SLD filter correction turns on and off independently of the TRK filter.
Please refer also to $38 (TLC0 to 2) and Figure 5-3.
TLC0
0
1
--
0
1
OFF
ON
OFF
OFF
ON
ON
TLD0
VC level correction
TRK filter
SLD filter
: preset, -- : Don't care
TLC1
0
1
--
0
1
OFF
ON
OFF
OFF
ON
ON
TLD1
Tracking zero level correction
TRK filter
SLD filter
TLC2
0
1
--
0
1
OFF
ON
OFF
OFF
ON
ON
TLD2
Traverse center correction
TRK filter
SLD filter
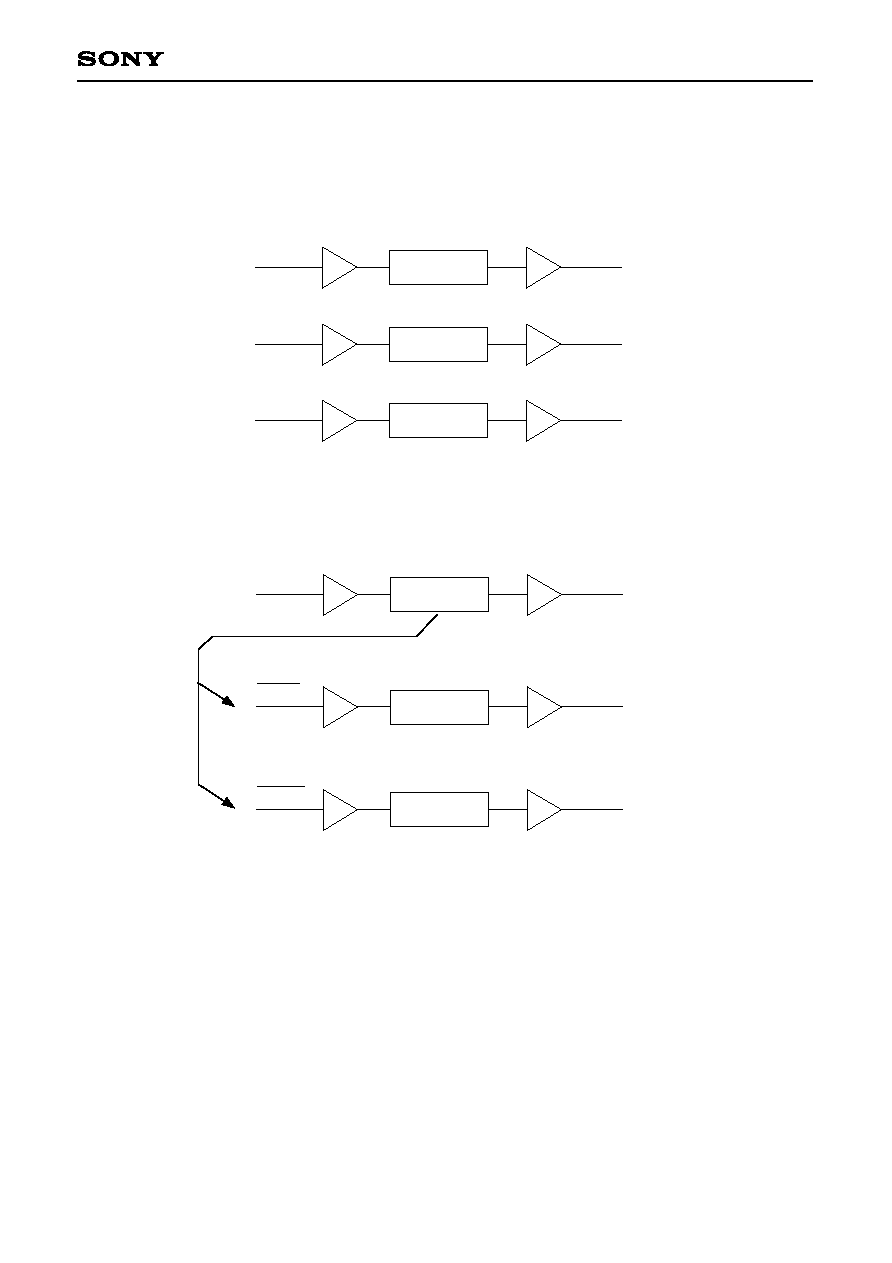
≠ 106 ≠
CXD2588Q/R
∑ Input coefficient inversion when SFID = 1 and THID = 1
The preset coefficients for the TRK filter are negative for input and positive for output. With this, the error input
and servo that outputs reversed phase drive can be hypothesized.
TRK Filter
Negative input coefficient
Positive output coefficient
TE
SLD Filter
Negative input coefficient
Positive output coefficient
SE
TRK Hold Filter
Positive input coefficient
Positive output coefficient
TRK Hold
When SFID = 1, the TRK filter negative input coefficient is applied to the SLD filter, so invert the SLD input
coefficient (K00) code.
For the same reason, when THID = 1, invert the TRK hold input coefficient (K40) code.
TRK Filter
Negative input coefficient
Positive output coefficient
TE
SLD Filter
Positive input coefficient
Positive output coefficient
SE
TRK Hold Filter
Negative input coefficient
Positive output coefficient
TRK Hold
M0D
Please refer also to ß 5-20. Filter Composition.
≠ 107 ≠
CXD2588Q/R
$3E (preset: $3E 00 00)
F1NM, F1DM: Quasi double accuracy setting for FCS servo filter first-stage
On when set to 1; default = 0.
F1NM: Gain normal
F1DM: Gain down
T1NM, T1UM: Quasi double accuracy setting for TRK servo filter first-stage
On when set to 1; default = 0.
T1NM: Gain normal
T1UM: Gain up
F3NM, F3DM: Quasi double accuracy setting for FCS servo filter third-stage
On when set to 1; default = 0.
Generally, the advance amount of the phase becomes large by partially setting the FCS servo
third-stage filter which is used as the phase compensation filter to double accuracy.
F3NM: Gain normal
F3DM: Gain down
T3NM, T3UM: Quasi double accuracy setting for TRK servo filter third-stage
On when set to 1; default = 0.
Generally, the advance amount of the phase becomes large by partially setting the TRK servo
third-stage filter which is used as the phase compensation filter to double accuracy.
T3NM: Gain normal
T3UM: Gain up
Note) Filter first- and third-stage quasi double accuracy settings can be set individually.
See "Filter Composition" at the end of this specification concerning quasi double accuracy.
DFIS:
FCS hold filter input extraction node selection
0: M05 (Data RAM address 05); default
1: M04 (Data RAM address 04)
TLCD:
This command masks the TLC2 command set by D2 of $38 only when FOK is low.
On when set to 1; default = 0
LKIN:
When 0, the internally generated LOCK signal is output to the LOCK pin. (default)
When 1, the LOCK signal can be input from an external source to the LOCK pin.
COIN:
When 0, the internally generated COUT signal is output to the COUT pin. (default)
When 1, the COUT signal can be input from an external source to the COUT pin.
The MIRR, DFCT and FOK signals can also be input from an external source.
MDFI:
When 0, the MIRR, DFCT and FOK signals are generated internally. (default)
When 1, the MIRR, DFCT and FOK signals can be input from an external source through the
MIRR, DFCT and FOK pins.
MIRI:
When 0, the MIRR signal is generated internally. (default)
When 1, the MIRR signal can be input from an external source through the MIRR pin.
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
F1NM F1DM F3NM F3DM T1NM T1UM T3NM T3UM DFIS TLCD
0
LKIN COIN MDFI MIRI XT1D
XT1D:
The clock input from FSTI can be used without being frequency-divided as the master clock for
the servo block by setting D0 to 1. This command takes precedence over the XTSL pin, XT2D
and XT4D. See the description of $3F for XT2D and XT4D.
MDFI
0
0
1
0
1
--
MIRR, DFCT and FOK are all generated internally.
MIRR only is input from an external source.
MIRR, DFCT and FOK are all input from an external source.
MIRI
: preset, --: don't care
≠ 108 ≠
CXD2588Q/R
$3F (preset: $3F 00 00)
D15
D14
D13
D12
D11
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
0
AGG4 XT4D XT2D
0
DRR2 DRR1 DRR0
0
ASFG FTQ LPAS SRO1
0
AGHF ASOT
XT4D, XT2D: MCK (digital servo master clock) frequency division setting
This command forcibly sets the frequency division ratio to 1/4, 1/2 or 1/1 when MCK is
generated from the signal input to the FSTI pin. See the description of $3E for XT1D.
AGG4:
This varies the amplitude of the internally generated sine wave using the AGGF and AGGT
commands during AGC.
When AGG4 = 0, the default is used. When AGG4 = 1, the setting is as shown in the table below.
AGGF (MSB)
0
0
1
1
0
1
0
1
1/64
◊
V
DD
◊
0.4 [V]
1/32
◊
V
DD
◊
0.4
1/16
◊
V
DD
◊
0.4
1/8
◊
V
DD
◊
0.4
AGGT (LSB)
TE/FE input conversion
DRR2 to DRR0: Partially clears the Data RAM values (0 write).
The following values are cleared when set to 1 (on) respectively; default = 0
DRR2: M08, M09, M0A
DRR1: M00, M01, M02
DRR0: M00, M01, M02 only when LOCK = low
Note) Set DRR1 and DRR0 on for 50µs or more.
ASFG:
When vibration detection is performed during anti-shock circuit operation, FCS servo filter is
forcibly set to gain normal status.
On when set to 1; default = 0
LPAS:
Built-in analog buffer low-current consumption mode
This mode reduces the total analog buffer current consumption for the VC, TE, SE and FE
input analog buffers by using a single operational amplifier.
On when set to 1; default = 0
Note) When using this mode, first check whether each error signal is properly A/D converted
using the SRO1 and SRO0 commands of $3F.
SRO1:
These commands are used to output various data externally continuously which have been
specified with the $39 command. (However, D15 (DAC) of $39 must be set to 1.)
Digital output (SOCK, XOLT and SOUT) can be obtained from three specified pins by setting
these commands to 1 respectively. The default is 0, 0. (no readout)
The output pins for each case are shown below.
SOCK
XOLT
SOUT
LMUT pin
WFCK pin
RMUT pin
SRO1 = 1
(See "Description of Data Readout" on the following page.)
AGHF:
This halves the frequency of the internally generated sine wave during AGC.
FTQ:
The slope of the output during focus search is a quarter of the conventional output slope. ON
when set to 1, default = 0.
ASOT:
The anti-shock signal, which is internally detected, is output from the ATSK pin. Output when
set to 1; default = 0.
Vibration detection when a high signal is output for the anti-shock signal output.
These settings are the same for
both focus auto gain control and
tracking auto gain control.
: preset, --: don't care
XT1D
0
1
0
0
XT2D
0
--
1
0
XT4D
0
--
--
1
According to XTSL
1/1
1/2
1/4
Frequency division ratio
: preset

≠ 109 ≠
CXD2588Q/R
Description of Data Readout
SOCK
(5.6448MHz)
XOLT
(88.2kHz)
SOUT
MSB
LSB
∑ ∑ ∑
MSB
LSB
∑ ∑ ∑
∑ ∑ ∑
∑ ∑ ∑
∑ ∑ ∑
∑ ∑ ∑
16-bit register for
serial/parallel
conversion
16-bit register
for latch
SOUT
SOCK
XOLT
CLK
CLK
MSB
LSB
∑
∑
∑
∑
∑
∑
To the 7-segment LED
To the 7-segment LED
Data is connected to the 7-segment LED by
4-bits at a time. This enables Hex display
using four 7-segment LEDs.
MSB
LSB
SOUT
SOCK
XOLT
Serial data input
Clock input
Latch enable input
Analog
output
D/A
To an oscilloscope, etc.
Offset adjustment,
gain adjustment
Waveforms can be monitored with an oscilloscope using
a serial input-type D/A converter as shown above.

≠ 110 ≠
CXD2588Q/R
ß5-19. List of Servo Filter Coefficients
<Coefficient Preset Value Table (1)>
Fix indicates that normal preset values.
ADDRESS
K00
K01
K02
K03
K04
K05
K06
K07
K08
K09
K0A
K0B
K0C
K0D
K0E
K0F
E0
81
23
7F
6A
10
14
30
7F
46
81
1C
7F
58
82
7F
SLED INPUT GAIN
SLED LOW BOOST FILTER A-H
SLED LOW BOOST FILTER A-L
SLED LOW BOOST FILTER B-H
SLED LOW BOOST FILTER B-L
SLED OUTPUT GAIN
FOCUS INPUT GAIN
SLED AUTO GAIN
FOCUS HIGH CUT FILTER A
FOCUS HIGH CUT FILTER B
FOCUS LOW BOOST FILTER A-H
FOCUS LOW BOOST FILTER A-L
FOCUS LOW BOOST FILTER B-H
FOCUS LOW BOOST FILTER B-L
FOCUS PHASE COMPENSATE FILTER A
FOCUS DEFECT HOLD GAIN
K10
K11
K12
K13
K14
K15
K16
K17
K18
K19
K1A
K1B
K1C
K1D
K1E
K1F
K20
K21
K22
K23
K24
K25
K26
K27
K28
K29
K2A
K2B
K2C
K2D
K2E
K2F
4E
32
20
30
80
77
80
77
00
F1
7F
3B
81
44
7F
5E
FOCUS PHASE COMPENSATE FILTER B
FOCUS OUTPUT GAIN
ANTI SHOCK INPUT GAIN
FOCUS AUTO GAIN
HPTZC / Auto Gain HIGH PASS FILTER A
HPTZC / Auto Gain HIGH PASS FILTER B
ANTI SHOCK HIGH PASS FILTER A
HPTZC / Auto Gain LOW PASS FILTER B
Fix
TRACKING INPUT GAIN
TRACKING HIGH CUT FILTER A
TRACKING HIGH CUT FILTER B
TRACKING LOW BOOST FILTER A-H
TRACKING LOW BOOST FILTER A-L
TRACKING LOW BOOST FILTER B-H
TRACKING LOW BOOST FILTER B-L
82
44
18
30
7F
46
81
3A
7F
66
82
44
4E
1B
00
00
TRACKING PHASE COMPENSATE FILTER A
TRACKING PHASE COMPENSATE FILTER B
TRACKING OUTPUT GAIN
TRACKING AUTO GAIN
FOCUS GAIN DOWN HIGH CUT FILTER A
FOCUS GAIN DOWN HIGH CUT FILTER B
FOCUS GAIN DOWN LOW BOOST FILTER A-H
FOCUS GAIN DOWN LOW BOOST FILTER A-L
FOCUS GAIN DOWN LOW BOOST FILTER B-H
FOCUS GAIN DOWN LOW BOOST FILTER B-L
FOCUS GAIN DOWN PHASE COMPENSATE FILTER A
FOCUS GAIN DOWN DEFECT HOLD GAIN
FOCUS GAIN DOWN PHASE COMPENSATE FILTER B
FOCUS GAIN DOWN OUTPUT GAIN
NOT USED
NOT USED
DATA
CONTENTS
≠ 111 ≠
CXD2588Q/R
<Coefficient Preset Value Table (2)>
ADDRESS
K30
K31
K32
K33
K34
K35
K36
K37
K38
K39
K3A
K3B
K3C
K3D
K3E
K3F
80
66
00
7F
6E
20
7F
3B
80
44
7F
77
86
0D
57
00
SLED INPUT GAIN (Only when TRK Gain Up2 is accessed with SFSK = 1.)
ANTI SHOCK LOW PASS FILTER B
NOT USED
ANTI SHOCK HIGH PASS FILTER B-H
ANTI SHOCK HIGH PASS FILTER B-L
ANTI SHOCK FILTER COMPARATE GAIN
TRACKING GAIN UP2 HIGH CUT FILTER A
TRACKING GAIN UP2 HIGH CUT FILTER B
TRACKING GAIN UP2 LOW BOOST FILTER A-H
TRACKING GAIN UP2 LOW BOOST FILTER A-L
TRACKING GAIN UP2 LOW BOOST FILTER B-H
TRACKING GAIN UP2 LOW BOOST FILTER B-L
TRACKING GAIN UP PHASE COMPENSATE FILTER A
TRACKING GAIN UP PHASE COMPENSATE FILTER B
TRACKING GAIN UP OUTPUT GAIN
NOT USED
K40
K41
K42
K43
K44
K45
K46
K47
K48
K49
K4A
K4B
K4C
K4D
K4E
K4F
04
7F
7F
79
17
6D
00
00
02
7F
7F
79
17
54
00
00
TRACKING HOLD FILTER INPUT GAIN
TRACKING HOLD FILTER A-H
TRACKING HOLD FILTER A-L
TRACKING HOLD FILTER B-H
TRACKING HOLD FILTER B-L
TRACKING HOLD FILTER OUTPUT GAIN
TRACKING HOLD FILTER INPUT GAIN (Only when TRK Gain Up2 is accessed with THSK = 1.)
NOT USED
FOCUS HOLD FILTER INPUT GAIN
FOCUS HOLD FILTER A-H
FOCUS HOLD FILTER A-L
FOCUS HOLD FILTER B-H
FOCUS HOLD FILTER B-L
FOCUS HOLD FILTER OUTPUT GAIN
NOT USED
NOT USED
DATA
CONTENTS

≠ 112 ≠
CXD2588Q/R
ß5-20. Filter Composition
The internal filter composition is shown below.
K
and M
indicate coefficient RAM and Data RAM address values respectively.
FCS Servo Gain Normal fs = 88.2kHz
K0D
K0C
K0E
K10
Z
≠1
K0B
Z
≠1
K09
K0A
K08
Z
≠1
M04
M03
2
≠7
2
≠7
M05
M06
Z
≠1
K11
K13
K0F
FCS
Hold Reg 1
FCS
AUTO Gain
FCS PWM
2
7
FCS SRCH
M07
2
≠1
K06
AGFON
K06
DFCT
FCS
Hold Reg 2
FCS
In Reg
Sin ROM
FCS Servo Gain Down fs = 88.2kHz
K29
K28
K2A
K2C
Z
≠1
K27
Z
≠1
K25
K26
K24
Z
≠1
M04
M03
2
≠7
2
≠7
M05
M06
Z
≠1
K2D
K13
K2B
FCS
Hold Reg 1
FCS
AUTO Gain
FCS PWM
2
7
FCS SRCH
M07
2
≠1
K06
DFCT
FCS
Hold Reg 2
FCS
In Reg
Note) Set the MSB bit of the K0B and K0D coefficients to 0.
Note) Set the MSB bit of the K27 and K29 coefficients to 0.

≠ 113 ≠
CXD2588Q/R
TRK Servo Gain Normal fs = 88.2kHz
K1F
K1E
K20
K21
Z
≠1
K1D
Z
≠1
K1B
K1C
K1A
Z
≠1
M0C
M0B
2
≠7
2
≠7
M0D
M0E
Z
≠1
K22
K23
TRK
AUTO Gain
TRK PWM
2
7
TRK JMP
M0F
2
≠1
K19
AGTON
K19
DFCT
TRK
Hold Reg
TRK
In Reg
Sin ROM
To SLD Servo, TRK Hold
Note) Set the MSB bit of the K1D and K1F coefficients to 0.
TRK Servo Gain Up 1 fs = 88.2kHz
K3D
Z
≠1
Z
≠1
K1B
K3C
K1A
Z
≠1
M0C
M0B
M0E
K3E
K23
TRK
AUTO Gain
TRK PWM
2
7
TRK JMP
M0F
2
≠1
K19
DFCT
TRK
Hold Reg
TRK
In Reg
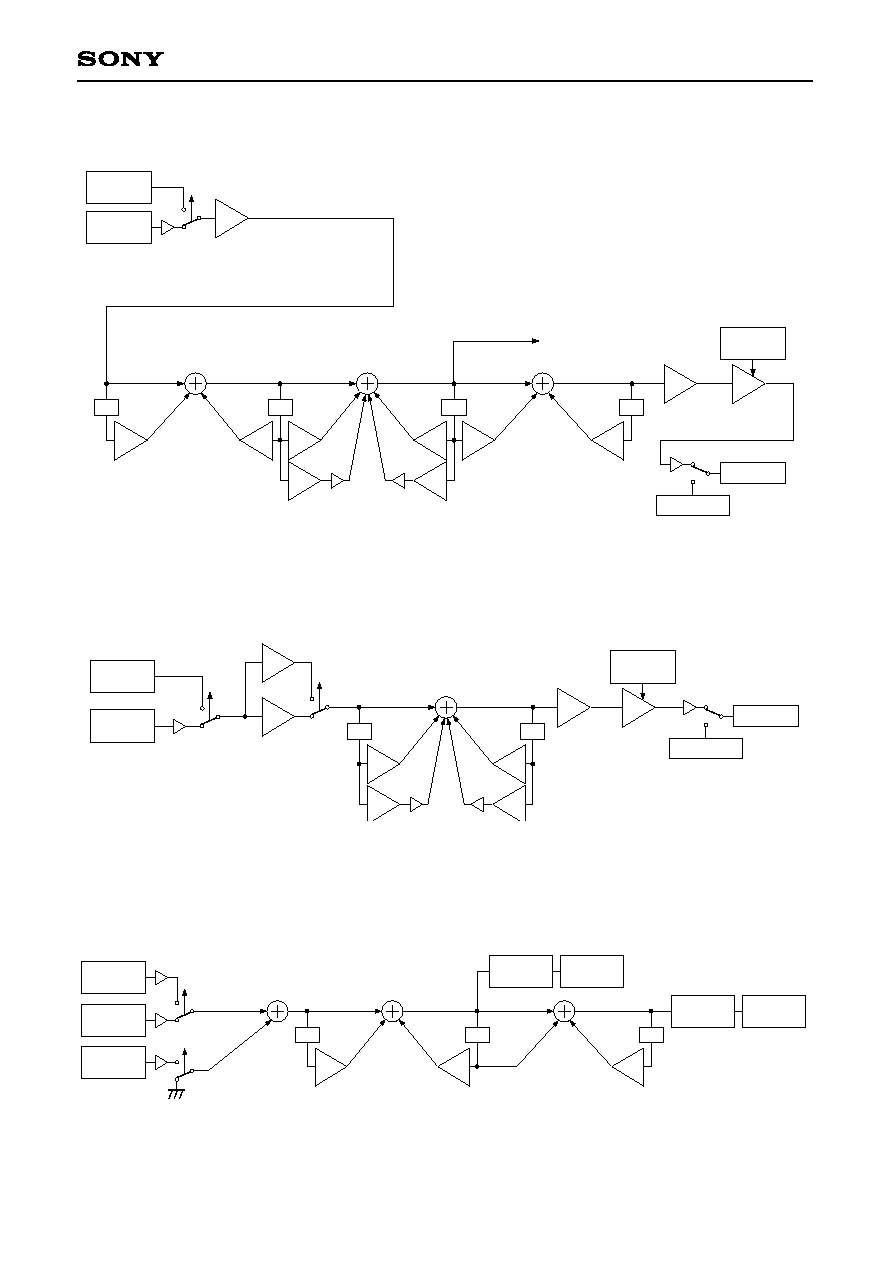
≠ 114 ≠
CXD2588Q/R
TRK Servo Gain Up 2 fs = 88.2kHz
K3B
K3A
K3C
K3D
Z
≠1
K39
Z
≠1
K37
K38
K36
Z
≠1
M0C
M0B
2
≠7
2
≠7
M0D
M0E
Z
≠1
K3E
K23
TRK
AUTO Gain
TRK PWM
2
7
TRK JMP
M0F
2
≠1
K19
DFCT
TRK
Hold Reg
TRK
In Reg
To SLD Servo, TRK Hold
Note) Set the MSB bit of the K39 and K3B coefficients to 0.
SLD Servo fs = 345Hz
K04
K03
Z
≠1
K02
Z
≠1
K01
K00
M00
2
≠7
2
≠7
M01
K05
K07
TRK
AUTO Gain
SLD PWM
2
≠7
SLD MOV
M02
SLD
In Reg
2
≠1
K30
SFSK (only when TGUP2 is used)
SFID
M0D
TRK SERVO FILTER
Second-stage output
Note) Set the MSB bit of the K02 and K04 coefficients to 0.
HPTZC/Auto Gain fs = 88.2kHz
K15
K17
Z
≠1
K14
M08
M09
M0A
Z
≠1
AUTO Gain
Reg
2
≠1
AGTON
AGFON
AGFON
FCS
In Reg
TRK
In Reg
Sin ROM
Z
≠1
Slice
TZC Reg
Slice
2
≠1

≠ 115 ≠
CXD2588Q/R
Anti Shock fs = 88.2kHz
K34
K33
Z
≠1
Z
≠1
K31
K16
Z
≠1
M09
M08
2
≠7
M0A
K35
Comp
K12
Anti Shock
Reg
2
≠1
TRK
In Reg
Note) Set the MSB bit of the K34 coefficient to 0.
The comparator input is 1/16 the maximum amplitude of the comparator input.
AVRG fs = 88.2kHz
M08
AVRG Reg
2
≠1
VC, TE, FE,
RFDC
Z
≠1
2
≠7
TRK Hold fs = 345Hz
K44
K43
Z
≠1
K42
Z
≠1
K41
K40
M18
2
≠7
2
≠7
M19
K45
TRK
Hold Reg
SLD
In Reg
2
≠1
K46
THSK (only when TGUP2 is used)
THID
M0D
TRK SERVO FILTER
Second-stage output
Note) Set the MSB bit of the K42 and K44 coefficients to 0.
FCS Hold fs = 345Hz
K4C
K4B
Z
≠1
K4A
Z
≠1
K49
K48
M10
2
≠7
2
≠7
M11
K4D
FCS
Hold Reg 1
FCS
Hold Reg 2
Note) Set the MSB bit of the K4A and K4C coefficients to 0.
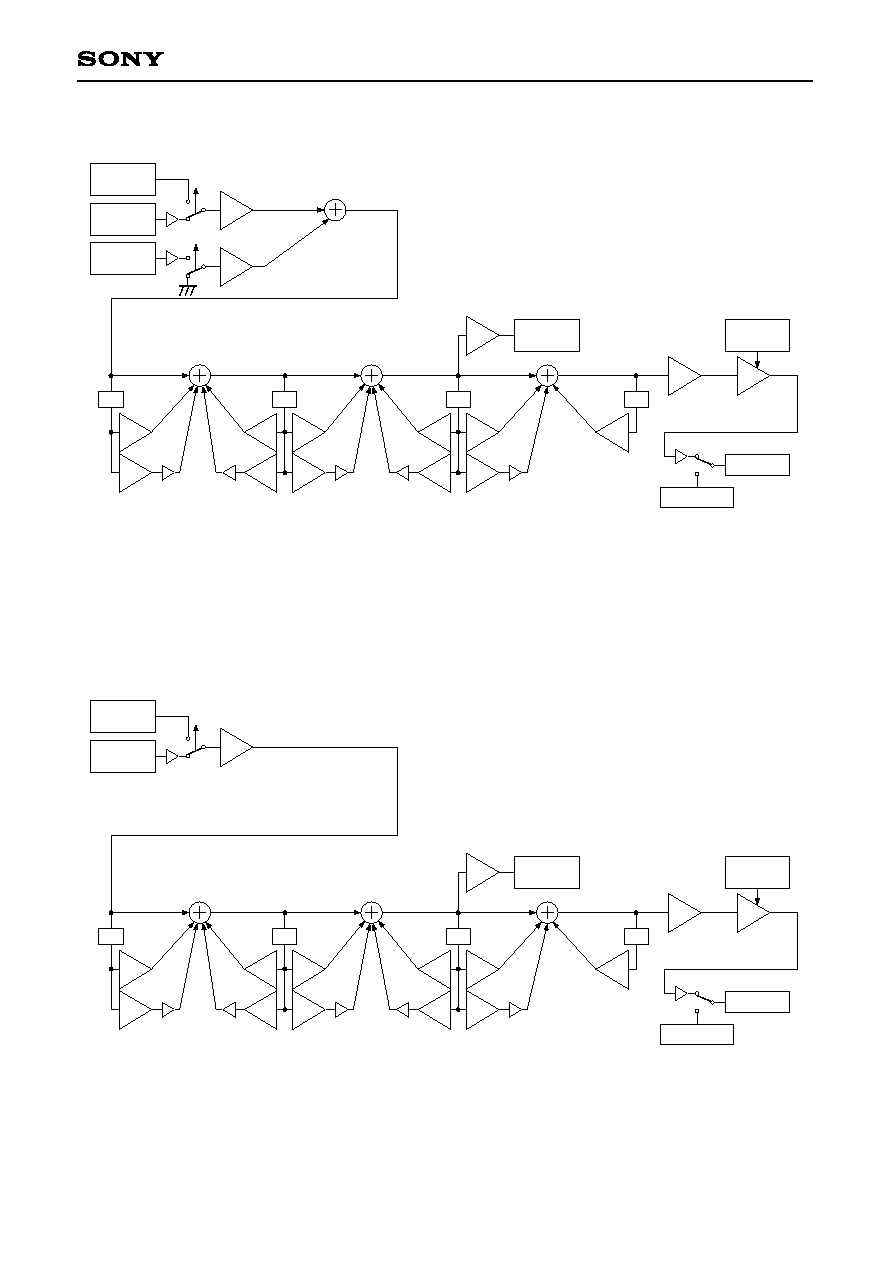
≠ 116 ≠
CXD2588Q/R
FCS Servo Gain Normal; Fs = 88.2kHz, during quasi double accuracy (Ex.: $3EAXX0)
K0D
K0C
80H
K10
Z
≠1
K0B
Z
≠1
7FH
K0A
81H
Z
≠1
M04
M03
2
≠7
2
≠7
M05
M06
Z
≠1
K11
K13
K0F
FCS
Hold Reg 1
FCS
AUTO Gain
FCS PWM
2
7
FCS SRCH
M07
2
≠1
K06
AGFON
K06
DFCT
FCS
Hold Reg 2
FCS
In Reg
Sin ROM
K08
K09
2
≠7
2
≠7
K0E
2
≠7
81H, 7FH and 80H are each Hex display 8-bit fixed values when set to quasi double accuracy.
Note) Set the MSB bit of the K0B and K0D coefficients during normal operation, and of the K08, K09
and K0E coefficients during quasi double accuracy to 0.
FCS Servo Gain Down; Fs = 88.2kHz, during quasi double accuracy (Ex.: $3E5XX0)
K29
K28
80H
K2C
Z
≠1
K27
Z
≠1
7FH
K26
81H
Z
≠1
M04
M03
2
≠7
2
≠7
M05
M06
Z
≠1
K2D
K13
K2B
FCS
Hold Reg 1
FCS
AUTO Gain
FCS PWM
2
7
FCS SRCH
M07
2
≠1
K06
DFCT
FCS
Hold Reg 2
FCS
In Reg
K24
K25
2
≠7
2
≠7
K2A
2
≠7
81H, 7FH and 80H are each Hex display 8-bit fixed values when set to quasi double accuracy.
Note) Set the MSB bit of the K27 and K29 coefficients during normal operation, and of the K24, K25
and K2A coefficients during quasi double accuracy to 0.
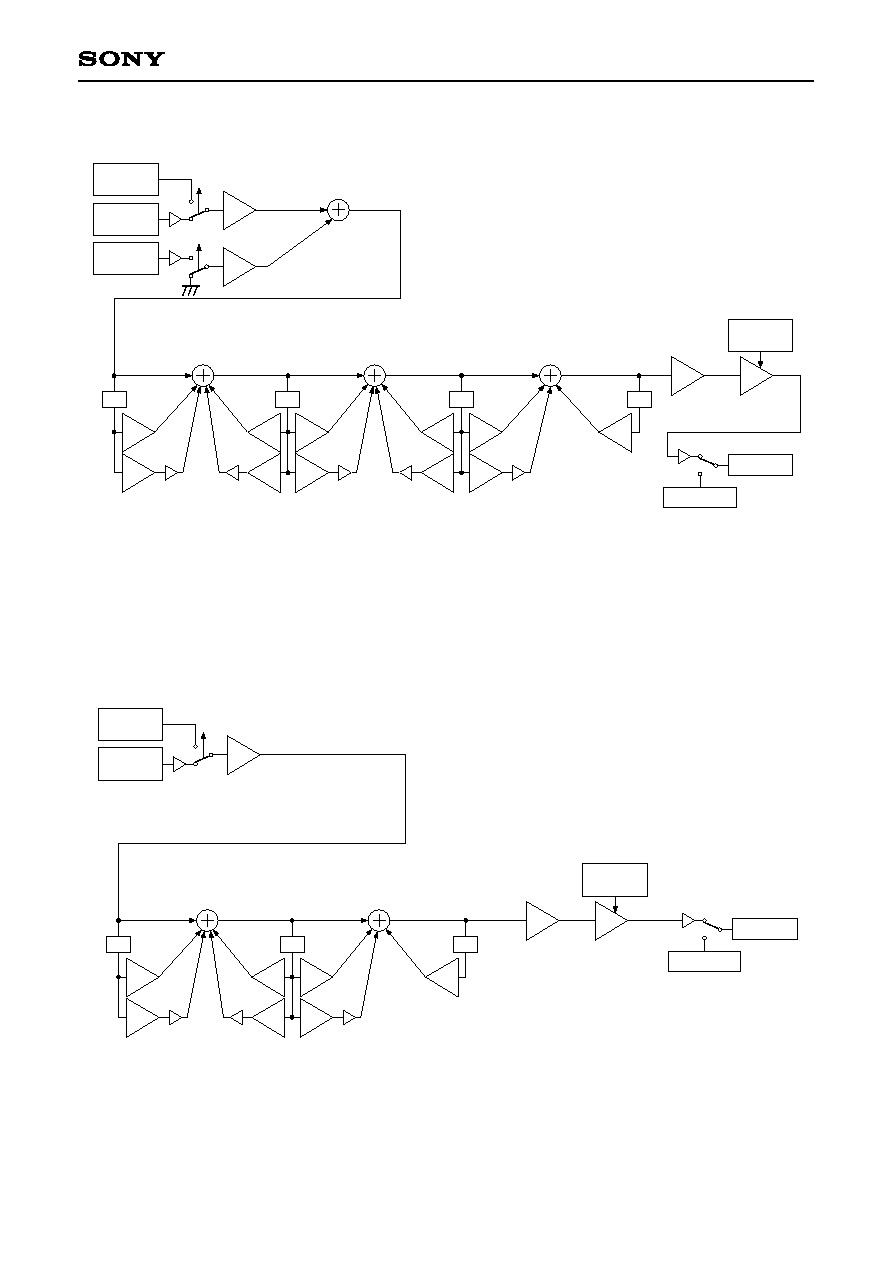
≠ 117 ≠
CXD2588Q/R
TRK Servo Gain Normal; Fs = 88.2kHz, during quasi double accuracy (Ex.: $3EXAX0)
K1F
K1E
80H
K21
Z
≠1
K1D
Z
≠1
7FH
K1C
81H
Z
≠1
M0C
M0B
2
≠7
2
≠7
M0D
M0E
Z
≠1
K22
K23
TRK
AUTO Gain
TRK PWM
2
7
TRK JMP
M0F
2
≠1
K19
AGTON
K19
DFCT
TRK
Hold Reg
TRK
In Reg
Sin ROM
K1A
K1B
2
≠7
2
≠7
K20
2
≠7
81H, 7FH and 80H are each Hex display 8-bit fixed values when set to quasi double accuracy.
Note) Set the MSB bit of the K1D and K1F coefficients during normal operation, and of the K1A, K1B
and K20 coefficients during quasi double accuracy to 0.
TRK Servo Gain up 1; Fs = 88.2kHz, during quasi double accuracy (Ex.: $3EX5X0)
K3D
Z
≠1
K3C
Z
≠1
7FH
80H
81H
Z
≠1
M0C
M0B
2
≠7
M0E
K3E
K23
TRK
AUTO Gain
TRK PWM
2
7
TRK JMP
M0F
2
≠1
K19
DFCT
TRK
Hold Reg
TRK
In Reg
K1A
K1B
2
≠7
2
≠7
81H, 7FH and 80H are each Hex display 8-bit fixed values when set to quasi double accuracy.
Note) Set the MSB bit of the K1A, K1B and K3C coefficients during quasi double accuracy to 0.
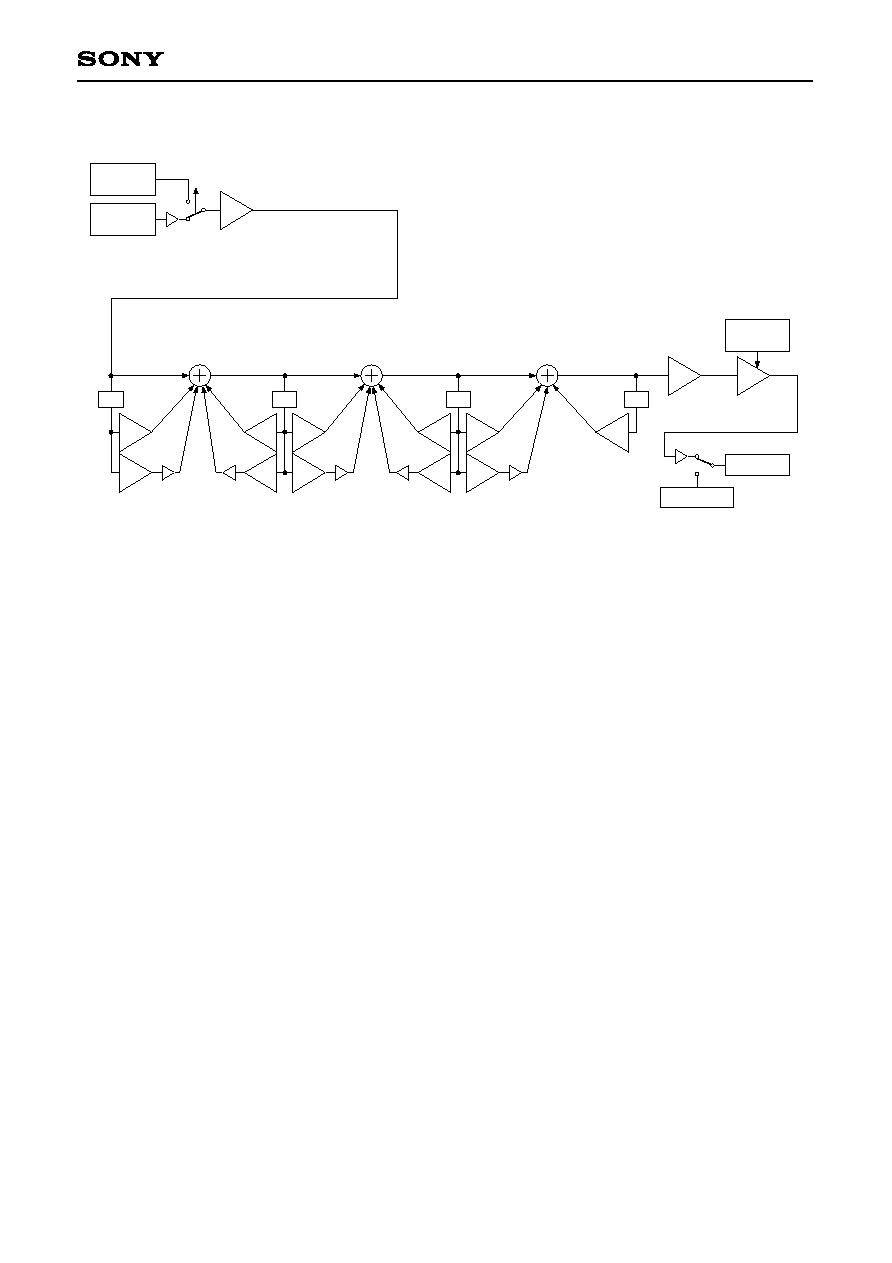
≠ 118 ≠
CXD2588Q/R
TRK Servo Gain up 2; Fs = 88.2kHz, during quasi double accuracy (Ex.: $3EX5X0)
K3B
K3A
80H
K3D
Z
≠1
K39
Z
≠1
7FH
K38
81H
Z
≠1
M0C
M0B
2
≠7
2
≠7
M0D
M0E
Z
≠1
K3E
K23
TRK
AUTO Gain
TRK PWM
2
7
TRK JMP
M0F
2
≠1
K19
DFCT
TRK
Hold Reg
TRK
In Reg
K36
K37
2
≠7
2
≠7
K3C
2
≠7
81H, 7FH and 80H are each Hex display 8-bit fixed values when set to quasi double accuracy.
Note) Set the MSB bit of the K39 and K3B coefficients during normal operation, and of the K36, K37
and K3C coefficients during quasi double accuracy to 0.
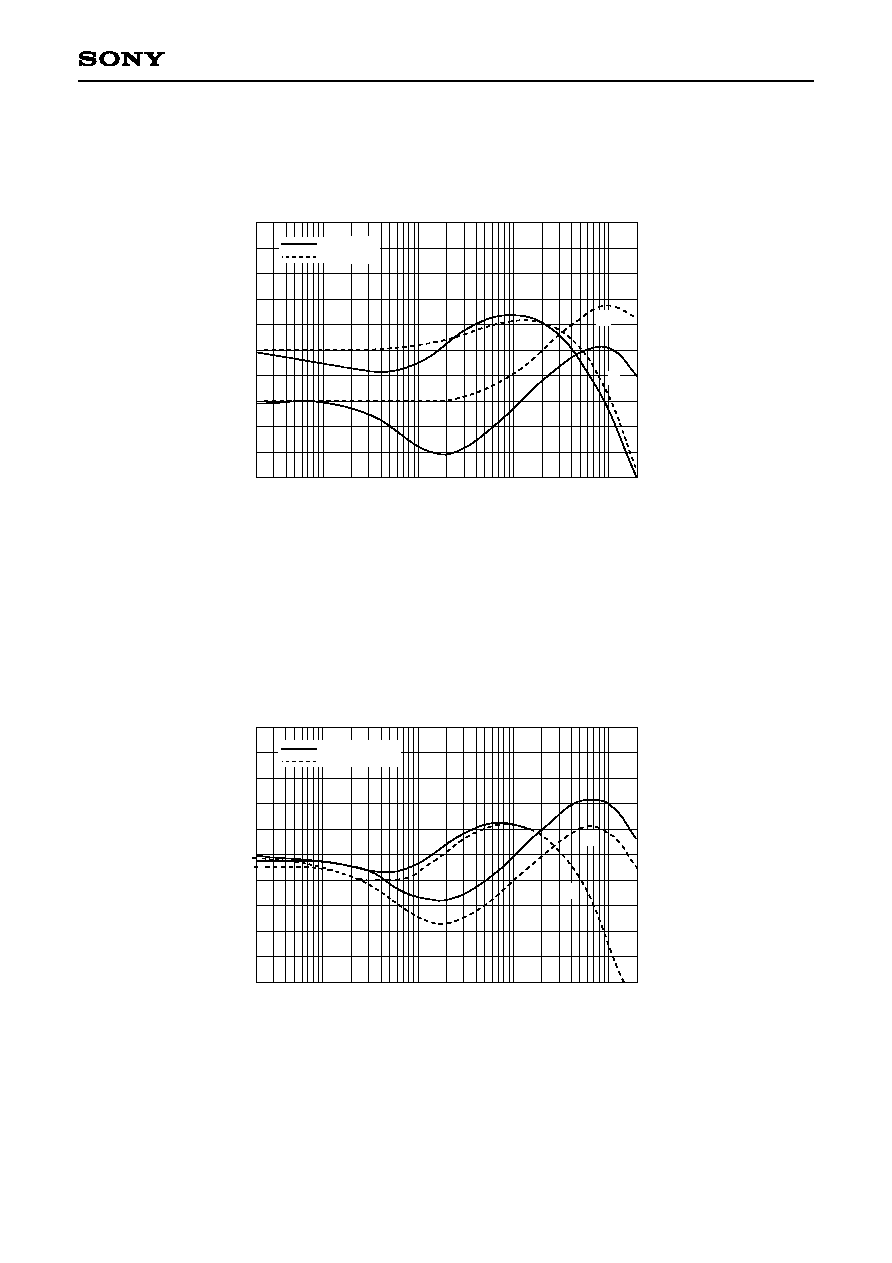
≠ 119 ≠
CXD2588Q/R
ß5-21. TRACKING and FOCUS Frequency Response
20K
1K
100
10
2.1
G
20K
1K
100
10
2.1
G
f ≠ Frequency [Hz]
≠10
0
10
20
30
40
G
≠
G
a
i
n
[
d
B
]
≠180∞
≠
P
h
a
s
e
[
d
e
g
r
e
e
]
0∞
180∞
90∞
≠90∞
f ≠ Frequency [Hz]
≠10
0
10
20
30
40
G
≠
G
a
i
n
[
d
B
]
≠180∞
≠
P
h
a
s
e
[
d
e
g
r
e
e
]
0∞
180∞
90∞
≠90∞
TRACKING frequency response
FOCUS frequency response
NORMAL
GAIN UP
NORMAL
GAIN DOWN
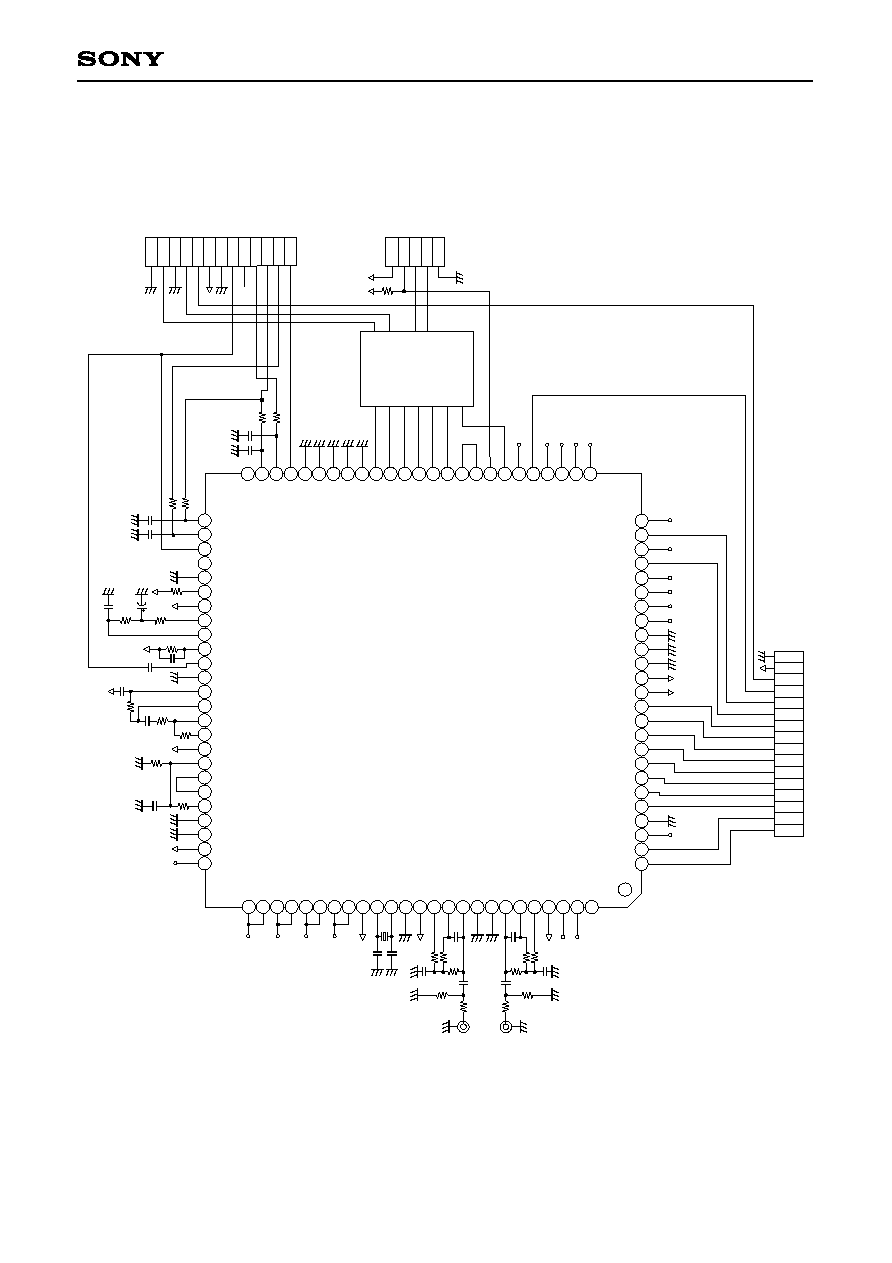
≠ 120 ≠
CXD2588Q/R
XR
ST
SQ
CK
MU
TE
XL
AT
DA
TA
CL
OK
SE
NS
SC
LK
PW
MI
GF
S
SC
OR
LD
ON
V
DD
SQ
SO
FO
K
XL
ON
XP
CK
C2
PO
C4
M
L
R
C
K
P
C
M
D
B
C
K
E
M
P
H
R
M
U
T
L
M
U
T
DO
UT
W
D
C
K
C
O
U
T
M
I
R
R
S
L
E
D
S
S
T
P
S
P
D
L
G
N
D
+
5
V
SQ
SO
SQ
CK
SB
SO
EX
CK
XR
ST
SY
SM
DA
TA
XL
AT
CL
OK
SE
NS
SC
LK
PW
MI
V
DD
V
DD
AT
SK
SP
OA
SP
OB
XL
ON
WF
CK
XU
GF
XP
CK
GF
S
C2
PO
SC
OR
C4
M
DO
UT
V
DD
TE
S2
V
SS
VP
CO
V1
6M
VC
KI
VC
TL
AV
DD
3
PC
O
FIL
I
FIL
O
CL
TV
AV
SS
3
RF
AC
BIA
S
AS
YI
AS
YO
AV
DD
0
IG
EN
AV
SS
0
AD
IO
RF
DC
CE
TE
L
R
C
K
L
R
C
K
I
P
C
M
D
P
C
M
D
I
B
C
K
B
C
K
I
E
M
P
H
E
M
P
H
I
X
V
D
D
X
T
A
I
X
T
A
O
X
V
S
S
A
V
D
D
1
A
O
U
T
1
A
I
N
1
L
O
U
T
1
A
V
S
S
1
A
V
S
S
2
L
O
U
T
2
A
I
N
2
A
O
U
T
2
A
V
D
D
2
R
M
U
T
L
M
U
T
N
C
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
1
7
6
7
7
7
8
7
9
8
0
2
6
2
7
2
8
2
9
3
0
4
0
3
9
3
8
3
7
3
6
3
5
3
4
3
1
3
2
3
3
4
1
4
2
4
3
4
4
4
5
4
6
4
7
4
8
4
9
5
0
8
1
8
2
8
3
8
4
8
8
8
7
8
6
8
5
8
9
9
0
1
0
0
9
9
9
8
9
7
9
6
9
5
9
4
9
1
9
2
9
3
5
1
5
2
5
3
5
4
5
5
5
6
5
7
5
8
5
9
6
0
7
0
6
9
6
8
6
7
6
3
6
4
6
5
6
6
6
1
6
2
7
1
7
2
7
3
7
4
7
5
N
C
S
E
F
E
V
C
X
T
S
L
T
E
S
1
T
E
S
T
V
S
S
V
S
S
F
R
D
R
F
F
D
R
T
R
D
R
T
F
D
R
S
R
D
R
S
F
D
R
F
S
T
I
F
S
T
O
S
S
T
P
M
D
P
L
O
C
K
F
O
K
D
F
C
T
M
I
R
R
C
O
U
T
W
D
C
K
GN
D
SB
SO
WF
CK
XU
GF
D
F
C
T
L
O
C
K
D
r
i
v
e
r
C
i
r
c
u
i
t
T
G
T
D
F
D
V
c
c
L
D
O
N
G
N
D
R
F
O
F
Z
C
F
E
T
E
C
E
F
G
V
C
ß6. Application Circuit
Application circuits shown are typical examples illustrating the operation of the
devices. Sony cannot assume responsibility for any problems arising out of the use of
these circuits or for any infringement of third party patent and other right due to same.
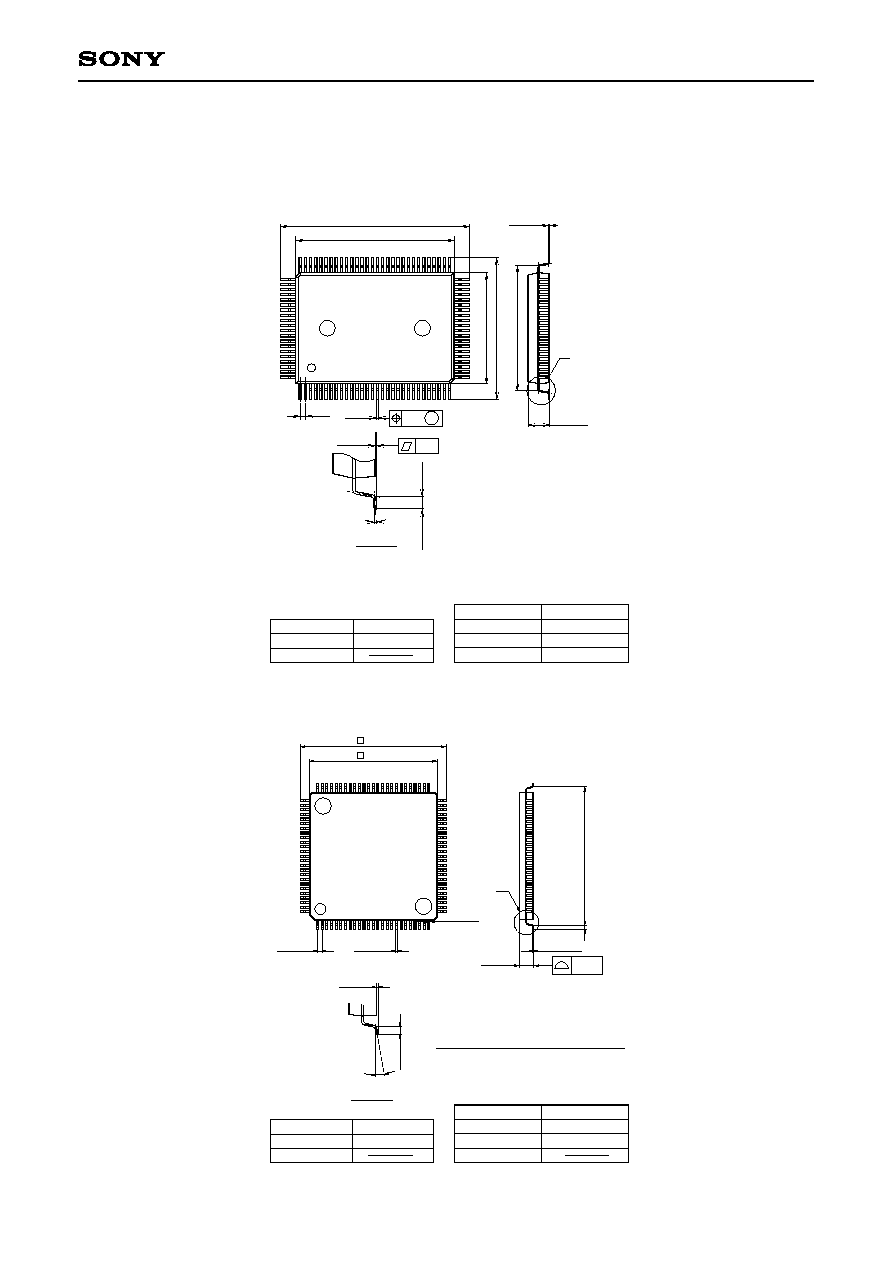
≠ 121 ≠
CXD2588Q/R
Package Outline
Unit: mm
CXD2588Q
CXD2588R
SONY CODE
EIAJ CODE
JEDEC CODE
PACKAGE MATERIAL
LEAD TREATMENT
LEAD MATERIAL
PACKAGE WEIGHT
EPOXY RESIN
SOLDER PLATING
COPPER / 42 ALLOY
PACKAGE STRUCTURE
23.9 ± 0.4
QFP-100P-L01
DETAIL A
M
100PIN QFP (PLASTIC)
20.0 ≠ 0.1
+ 0.4
0∞ to 15∞
0.15 ≠ 0.05
+ 0.1
1
5
.
8
±
0
.
4
1
7
.
9
±
0
.
4
1
4
.
0
≠
0
.
0
1
+
0
.
4
2.75 ≠ 0.15
+ 0.35
A
0.65
±0.12
0.15
0
.
8
±
0
.
2
(
1
6
.
3
)
QFP100-P-1420-A
1.4g
SONY CODE
EIAJ CODE
JEDEC CODE
PACKAGE MATERIAL
LEAD TREATMENT
LEAD MATERIAL
PACKAGE WEIGHT
EPOXY/PHENOL RESIN
SOLDER PLATING
42 ALLOY
PACKAGE STRUCTURE
DETAIL A
LQFP-100P-L01
QFP100-P-1414-A
100PIN LQFP (PLASTIC)
16.0 ± 0.2
14.0 ± 0.1
75
51
50
26
25
1
76
0.5 ± 0.08
0.18 ≠ 0.03
+ 0.08
(0.22)
A
1.5 ≠ 0.1
+ 0.2
0.127 ≠ 0.02
+ 0.05
0
.
5
±
0
.
2
(
1
5
.
0
)
0∞ to 10∞
0.1 ± 0.1
0
.
5
±
0
.
2
100
0.1
NOTE: Dimension "
" does not include mold protrusion.