
www.ti.com
FEATURES
DESCRIPTION
APPLICATIONS
Resistor
Network
8
18
Data
Buffer A
DAC
Register A
Data
Buffer D
DAC
Register D
DAC A
DAC D
Buffer
Control
Register
Control
Power-Down
Control Logic
V
OUT
A
V
OUT
B
V
OUT
C
V
OUT
D
V
REF
L
A0
A1
A2
A3
GND
I
2
C Block
SCL
SDA
LDAC
V
REF
H
IOV
DD
V
DD
DAC5573
SLAS401 ≠ NOVEMBER 2003
QUAD, 8-BIT, LOW-POWER, VOLTAGE OUTPUT,
I
2
C INTERFACE DIGITAL-TO-ANALOG CONVERTER
∑
Micropower Operation: 500 µA at 3 V V
DD
The DAC5573 is a low-power, quad channel, 8-bit
∑
Fast Update Rate: 188 kSPS
buffered voltage output DAC. Its on-chip precision
output amplifier allows rail-to-rail output swing. The
∑
Power-On Reset to Zero
DAC5573 utilizes an I
2
C-compatible two-wire serial
∑
2.7-V to 5.5-V Analog Power Supply
interface supporting high-speed interface mode with
∑
8-Bit Monotonic
address support of up to sixteen DAC5573s for a total
∑
I
2
CTM Interface up to 3.4 Mbps
of 64 channels on the bus.
∑
Data Transmit Capability
The DAC5573 requires an external reference voltage
∑
Rail-to-Rail Output Buffer Amplifier
to set the output range of the DAC. The DAC5573
incorporates a power-on-reset circuit that ensures
∑
Double-Buffered Input Register
that the DAC output powers up at zero volts and
∑
Address Support for up to Sixteen DAC5573s
remains there until a valid write takes place in the
∑
Synchronous Update for up to 64 Channels
device. The DAC5573 contains a power-down fea-
∑
Voltage Translators for all Digital Inputs
ture, accessed via the internal control register, that
reduces the current consumption of the device to 200
∑
Operation From ≠40
∞
C to 105
∞
C
nA at 5 V.
∑
Small 16 Lead TSSOP Package
The low power consumption of this part in normal
operation makes it ideally suited to portable battery
operated equipment. The power consumption is less
∑
Process Control
than 3 mW at V
DD
= 5 V reducing to 1 µW in
∑
Data Acquisition Systems
power-down mode.
∑
Closed-Loop Servo Control
The DAC5573 is available in a 16-lead TSSOP
∑
PC Peripherals
package.
∑
Portable Instrumentation
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas
Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
I
2
C is a trademark of Philips Corporation.
PRODUCTION DATA information is current as of publication date.
Copyright © 2003, Texas Instruments Incorporated
Products conform to specifications per the terms of the Texas
Instruments standard warranty. Production processing does not
necessarily include testing of all parameters.

www.ti.com
3
A3
A2
A1
1
2
3
4
5
6
7
8
16
15
14
1
12
11
10
9
V
OUT
A
V
OUT
B
V
REF
H
V
DD
V
REF
L
GND
V
OUT
C
V
OUT
D
A0
IOV
DD
SDA
SCL
LDAC
DAC5573
ABSOLUTE MAXIMUM RATINGS
(1)
DAC5573
SLAS401 ≠ NOVEMBER 2003
This integrated circuit can be damaged by ESD. Texas Instruments recommends that all integrated
circuits be handled with appropriate precautions. Failure to observe proper handling and installation
procedures can cause damage.
ESD damage can range from subtle performance degradation to complete device failure. Precision
integrated circuits may be more susceptible to damage because very small parametric changes could
cause the device not to meet its published specifications.
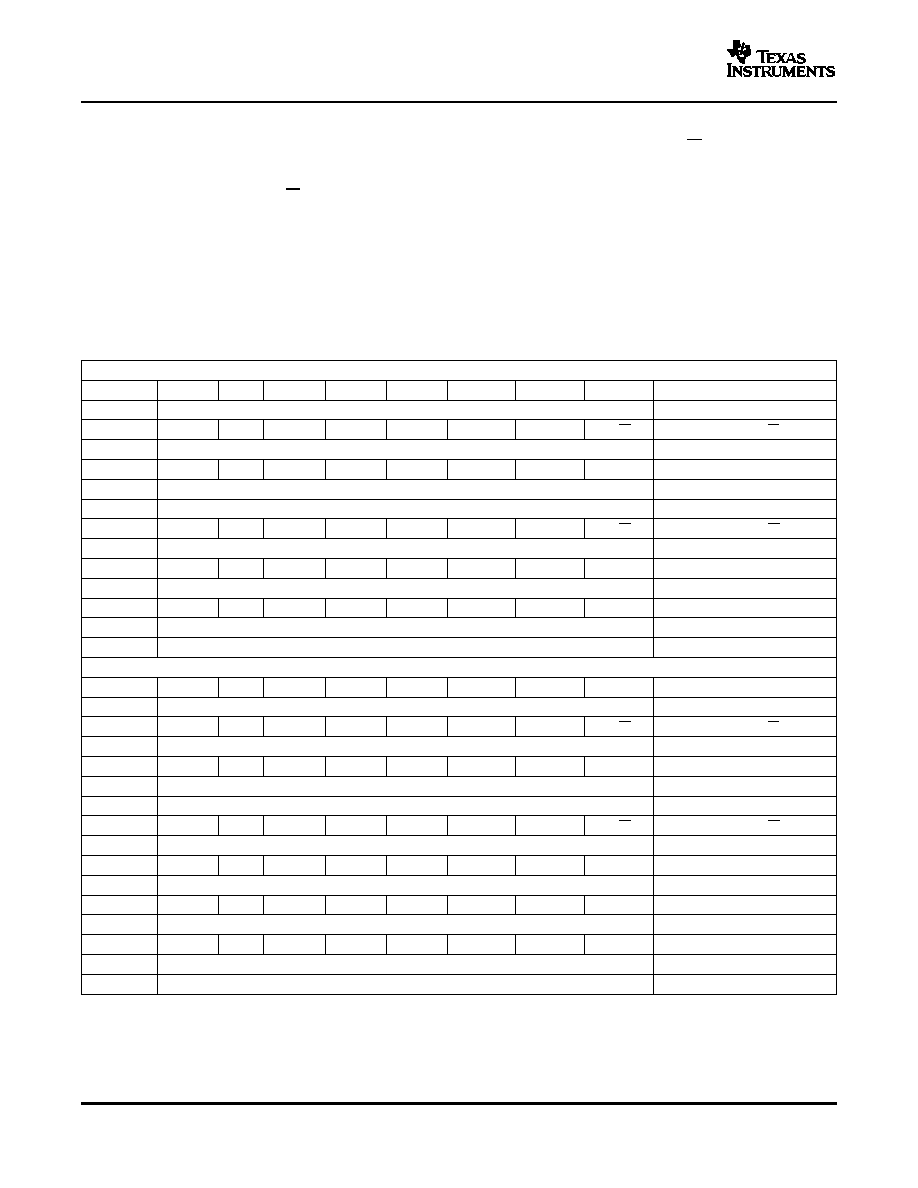
PACKAGE/ORDERING INFORMATION
PRODUCT
PACKAGE
PACKAGE
SPECIFICATION
PACKAGE
ORDERING
TRANSPORT MEDIA
DRAWING
TEMPERATURE
MARKING
NUMBER
NUMBER
RANGE
DAC5573
16-TSSOP
PW
≠40
∞
C TO +105
∞
C
D5573I
DAC5573IPW
90 Piece Tube
DAC5573IPWR
2000 Piece Tape and Reel
PW PACKAGE
PIN DESCRIPTIONS
(TOPVIEW)
PIN
NAME
DESCRIPTION
1
V
OUT
A
Analog output voltage from DAC A
2
V
OUT
B
Analog output voltage from DAC B
3
V
REF
H
Positive reference voltage input
4
V
DD
Analog voltage supply input
5
V
REF
L
Negative reference voltage input
Ground reference point for all circuitry on the
6
GND
part
7
V
OUT
C
Analog output voltage from DAC C
8
V
OUT
D
Analog output voltage from DAC D
9
LDAC
H/W synchronous V
OUT
update
10
SCL
Serial clock input
11
SDA
Serial data input
12
IOV
DD
I/O voltage supply input
13
A0
Device address select - I
2
C
14
A1
Device address select - I
2
C
15
A2
Device address select - Extended
16
A3
Device address select - Extended
V
DD
to GND
≠0.3 V to +6 V
Digital input voltage to GND
≠0.3 V to V
DD
+ 0.3 V
V
OUT
to GND
≠0.3 V to V
DD
+ 0.3 V
Operating temperature range
≠40
∞
C to +105
∞
C
Storage temperature range
≠65
∞
C to +150
∞
C
Junction temperature range (T
J
max)
+150
∞
C
Power dissipation:
Thermal impedance (R
JA
)
161
∞
C/W
Thermal impedance (R
JC
)
29
∞
C/W
Lead temperature, soldering:
Vapor phase (60s)
215
∞
C
Infrared (15s)
220
∞
C
(1)
Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. Exposure to absolute
maximum conditions for extended periods may affect device reliability.
2

www.ti.com
ELECTRICAL CHARACTERISTICS
DAC5573
SLAS401 ≠ NOVEMBER 2003
V
DD
= 2.7 V to 5.5 V, R
L
= 2 k
to GND; C
L
= 200 pF to GND; all specifications -40
∞
C to +105
∞
C, unless otherwise specified.
PARAMETER
TEST CONDITIONS
MIN
TYP
MAX
UNITS
STATIC PERFORMANCE
(1) (2)
Resolution
8
Bits
Relative accuracy
±
0.25
±
0.5
LSB
Differential nonlinearity
Specified monotonic by design
±
0.1
±
0.25
LSB
Zero-scale error
5
20
mV
Full-scale error
-0.15
±
1.0
% of FSR
Gain error
±
1.0
% of FSR
Zero code error drift
±
7
µV/
∞
C
Gain temperature coefficient
±
3
ppm of FSR/
∞
C
OUTPUT CHARACTERISTICS
(3)
Output voltage range
0
V
REF
H
V
Output voltage settling time (full scale)
R
L
=
; 0 pF < C
L
< 200 pF
6
8
µs
R
L
=
; C
L
= 500 pF
12
µs
Slew rate
1
V/µs
dc crosstalk (channel-to-channel)
0.0025
LSB
ac crosstalk (channel-to-channel)
1 kHz Sine Wave
-100
dB
Capacitive load stability
R
L
=
470
pF
R
L
= 2 k
1000
pF
Digital-to-analog glitch impulse
1 LSB change around major
12
nV-s
carry
Digital feedthrough
0.3
nV-s
dc output impedance
1
Short-circuit current
V
DD
= 5 V
50
mA
V
DD
= 3 V
20
mA
Power-up time
Coming out of power-down
2.5
µs
mode, V
DD
= +5 V
Coming out of power-down
5
µs
mode, V
DD
= +3 V
REFERENCE INPUT
V
REF
H Input range
0
V
DD
V
V
REF
L Input range
V
REF
L<V
REF
H
0
GND
V
DD
/2
V
Reference input impedance
25
k
Reference current
V
REF
=V
DD
= +5 V
185
260
µA
V
REF
=V
DD
= +3 V
122
200
LOGIC INPUTS
(3)
Input current
±
1
µA
V
IN_L
, Input low voltage
0.3xIOV
DD
V
V
IN_H
, Input high voltage
0.7xIOV
DD
V
Pin Capacitance
3
pF
POWER REQUIREMENTS
V
DD
, IOV
DD
2.7
5.5
V
I
DD
(normal operation), including reference current
Excluding load current
I
DD
@ V
DD
=+3.6V to +5.5V
V
IH
= IOV
DD
and V
IL
=GND
600
900
µA
I
DD
@ V
DD
=+2.7V to +3.6V
V
IH
= IOV
DD
and V
IL
=GND
500
750
µA
I
DD
(all power-down modes)
(1)
Linearity tested using a reduced code range of 3 to 253; output unloaded.
(2)
V
REF
H = V
DD
- 0.1, V
REF
L = GND
(3)
Specified by design and characterization, not production tested.
3

www.ti.com
TIMING CHARACTERISTICS
DAC5573
SLAS401 ≠ NOVEMBER 2003
ELECTRICAL CHARACTERISTICS (continued)
V
DD
= 2.7 V to 5.5 V, R
L
= 2 k
to GND; C
L
= 200 pF to GND; all specifications -40
∞
C to +105
∞
C, unless otherwise specified.
PARAMETER
TEST CONDITIONS
MIN
TYP
MAX
UNITS
I
DD
@ V
DD
=+3.6V to +5.5V
V
IH
= IOV
DD
and V
IL
=GND
0.2
1
µA
I
DD
@ V
DD
=+2.7V to +3.6V
V
IH
= IOV
DD
and V
IL
=GND
0.05
1
µA
POWER EFFICIENCY
I
OUT
/I
DD
I
LOAD
= 2 mA, V
DD
= +5 V
93%
TEMPERATURE RANGE
Specified performance
-40
+105
∞
C
V
DD
= 2.7 V to 5.5 V, R
L
= 2 k
to GND; all specifications ≠40
∞
C to +105
∞
C, unless otherwise specified.
SYMBOL
PARAMETER
TEST CONDITIONS
MIN
TYP
MAX
UNITS
Standard mode
100
kHz
Fast mode
400
kHz
f
SCL
SCL clock frequency
High-Speed mode, C
B
= 100 pF max
3.4
MHz
High-speed mode, C
B
= 400 pF max
1.7
MHz
Standard mode
4.7
µs
Bus free time between a STOP and
t
BUF
START condition
Fast mode
1.3
µs
Standard mode
4.0
µs
Hold time (repeated) START
t
HD
; t
STA
Fast mode
600
ns
condition
High-speed mode
160
ns
Standard mode
4.7
µs
Fast mode
1.3
µs
t
LOW
LOW period of the SCL clock
High-speed mode, C
B
= 100 pF max
160
ns
High-speed mode, C
B
= 400 pF max
320
ns
Standard mode
4.0
µs
Fast mode
600
ns
t
HIGH
HIGH period of the SCL clock
High-Speed Mode, C
B
= 100 pF max
60
ns
High-speed mode, C
B
= 400 pF max
120
ns
Standard mode
4.7
µs
Setup time for a repeated START
t
SU
; t
STA
Fast mode
600
ns
condition
High-speed mode
160
ns
Standard mode
250
ns
t
SU
; t
DAT
Data setup time
Fast mode
100
ns
High-speed mode
10
ns
Standard mode
0
3.45
µs
Fast mode
0
0.9
µs
t
HD
; t
DAT
Data hold time
High-speed mode, C
B
= 100 pF max
0
70
ns
High-speed mode, C
B
= 400 pF max
0
150
ns
Standard mode
1000
ns
Fast mode
20 + 0.1C
B
300
ns
t
RCL
Rise time of SCL signal
High-speed mode, C
B
= 100 pF max
10
40
ns
High-speed mode, C
B
= 400 pF max
20
80
ns
Standard mode
1000
ns
Rise time of SCL signal after a
Fast mode
20 + 0.1C
B
300
ns
t
RCL1
repeated START condition and after
High-speed mode, C
B
= 100 pF max
10
80
ns
an acknowledge BIT
High-speed mode, C
B
= 400 pF max
20
160
ns
4

www.ti.com
DAC5573
SLAS401 ≠ NOVEMBER 2003
TIMING CHARACTERISTICS (continued)
V
DD
= 2.7 V to 5.5 V, R
L
= 2 k
to GND; all specifications ≠40
∞
C to +105
∞
C, unless otherwise specified.
SYMBOL
PARAMETER
TEST CONDITIONS
MIN
TYP
MAX
UNITS
Standard mode
300
ns
Fast mode
20 + 0.1C
B
300
ns
t
FCL
Fall time of SCL signal
High-speed mode, C
B
= 100 pF max
10
40
ns
High-speed mode, C
B
= 400 pF max
20
80
ns
Standard mode
1000
ns
Fast mode
20 + 0.1C
B
300
ns
t
RDA
Rise time of SDA signal
High-speed mode, C
B
= 100 pF max
10
80
ns
High-speed mode, C
B
= 400 pF max
20
160
ns
Standard mode
300
ns
Fast mode
20 + 0.1C
B
300
ns
t
FDA
Fall time of SDA signal
High-speed mode, C
B
= 100 pF max
10
80
ns
High-speed mode, C
B
= 400 pF max
20
160
ns
Standard mode
4.0
µs
Setup time for STOP
t
SU
; t
STO
Fast mode
600
ns
condition
High-speed mode
160
ns
C
B
Capacitive load for SDA and SCL
400
pF
Fast mode
50
ns
Pulse width of spike
t
SP
suppressed
High-speed mode
10
ns
Standard mode
Noise margin at the HIGH level for
V
NH
each connected device
Fast mode
0.2 V
DD
V
(including hysteresis)
High-speed mode
Standard mode
Noise margin at the LOW level for
V
NL
each connected device
Fast mode
0.1 V
DD
V
(including hysteresis)
High-speed mode
5
www.ti.com
TYPICAL CHARACTERISTICS
-1
-0.5
0
0.5
1
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
Channel A
Channel A
V
DD
= 5 V
255
LE - LSB
DLE - LSB
-1
-0.5
0
0.5
1
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
Channel B
V
DD
= 5 V
255
LE - LSB
DLE - LSB
-1
-0.5
0
0.5
1
LE - LSB
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
DLE - LSB
255
Channel D
V
DD
= 5 V
-1
-0.5
0
0.5
1
LE - LSB
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
DLE - LSB
255
Channel C
V
DD
= 5 V
-1
-0.5
0
0.5
1
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
255
LE - LSB
DLE - LSB
Channel A
V
DD
= 2.7 V
-1
-0.5
0
0.5
1
LE - LSB
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
DLE - LSB
255
Channel B
V
DD
= 2.7 V
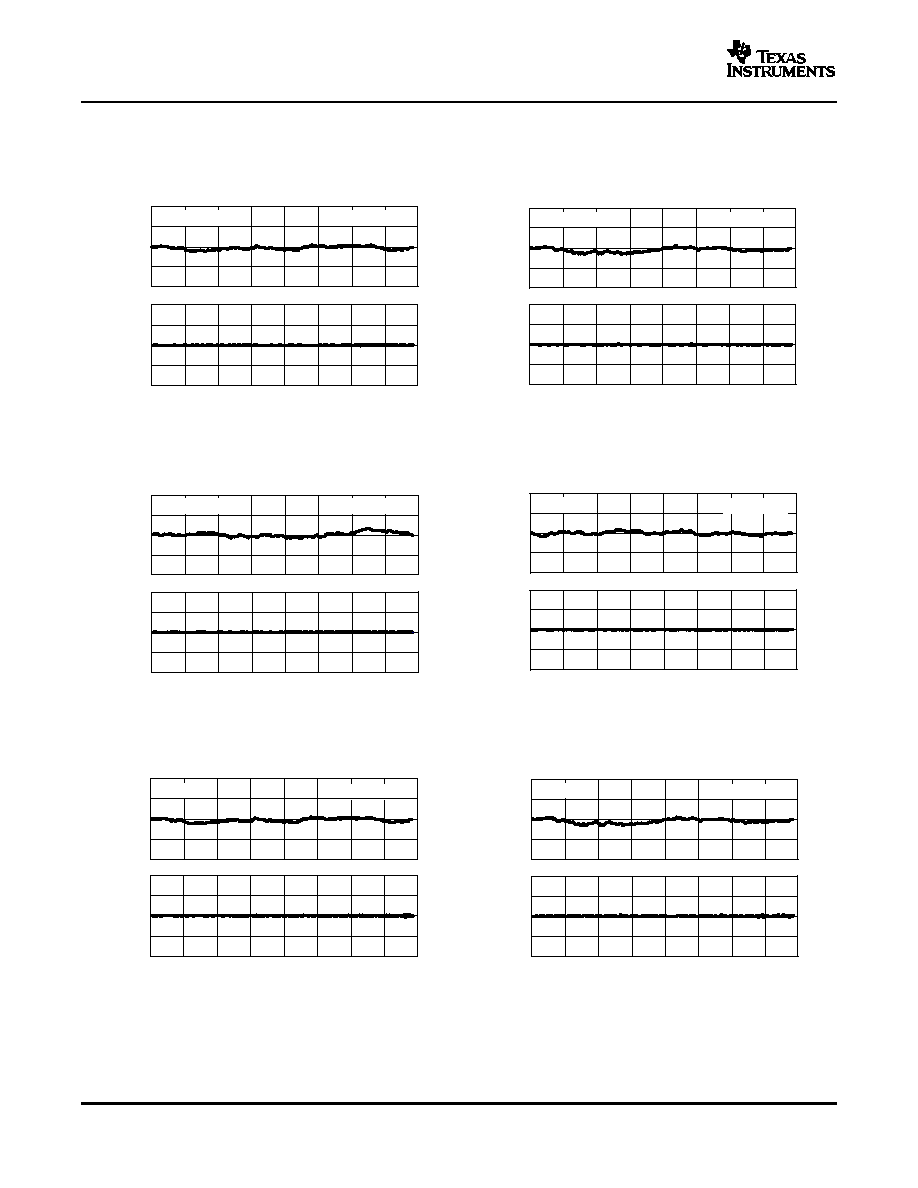
DAC5573
SLAS401 ≠ NOVEMBER 2003
At T
A
= +25
∞
C, unless otherwise noted.
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR vs DIGITAL INPUT CODE
LINEARITY ERROR vs DIGITAL INPUT CODE
Figure 1.
Figure 2.
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR vs DIGITAL INPUT CODE
LINEARITY ERROR vs DIGITAL INPUT CODE
Figure 3.
Figure 4.
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR vs DIGITAL INPUT CODE
LINEARITY ERROR vs DIGITAL INPUT CODE
Figure 5.
Figure 6.
6

www.ti.com
-1
-0.5
0
0.5
1
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
255
LE - LSB
DLE - LSB
Channel D
V
DD
= 2.7 V
-1
-0.5
0
0.5
1
-0.5
-0.25
0
0.25
0.5
0
32
64
96
128
160
192
224
Digital Input Code
255
LE - LSB
DLE - LSB
Channel C
V
DD
= 2.7 V
0
3
6
9
-40
-10
20
50
80
V
DD
= 5 V
CH A
CH D
CH C
CH B
T
A
- Free-Air Temperature -
∞
C
Zero-Scale Error - mV
-2
0
2
4
-40
-10
20
50
80
CH A
CH D
CH C
CH B
T
A
- Free-Air Temperature -
∞
C
Zero-Scale Error - mV
V
DD
= 2.7 V
-4
-3
-2
-1
-40
-10
20
50
80
CH A
CH D
CH C
CH B
T
A
- Free-Air Temperature -
∞
C
Full-Scale Error - mV
V
DD
= 5 V
-2
-1.75
-1.5
-1.25
-1
-40
-10
20
50
80
CH A
CH D
CH C
CH B
T
A
- Free-Air Temperature -
∞
C
Full-Scale Error - mV
V
DD
= 2.7 V
DAC5573
SLAS401 ≠ NOVEMBER 2003
TYPICAL CHARACTERISTICS (continued)
At T
A
= +25
∞
C, unless otherwise noted.
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR AND DIFFERENTIAL
LINEARITY ERROR vs DIGITAL INPUT CODE
LINEARITY ERROR vs DIGITAL INPUT CODE
Figure 7.
Figure 8.
ZERO-SCALE ERROR
ZERO-SCALE ERROR
vs TEMPERATURE
vs TEMPERATURE
Figure 9.
Figure 10.
FULL-SCALE ERROR
FULL-SCALE ERROR
vs TEMPERATURE
vs TEMPERATURE
Figure 11.
Figure 12.
7

www.ti.com
0.000
0.025
0.050
0.075
0.100
0.125
0.150
0
1
2
3
4
5
I
SINK
- Sink Current - mA
V
O
U
T
- Output V
oltage - V
V
DD
= 2.7 V
V
DD
= 5.5 V
DAC Loaded With 00
H
Typical For All Channels
5.30
5.35
5.40
5.45
5.50
0
1
2
3
4
5
I
SOURCE
- Source Current - mA
V
O
U
T
- Output V
oltage - V
DAC Loaded With FF
H
V
DD
= 5.5 V
Typical For All Channels
2.3
2.4
2.5
2.6
2.7
0
1
2
3
4
5
I
SOURCE
- Source Current - mA
V
O
U
T
- Output V
oltage - V
DAC Loaded With FF
H
V
DD
= 2.7 V
Typical For All Channels
Digital Input Code
0
100
200
300
400
500
600
700
800
0
32
64
96
128
160
192
224
I
D
D
- Supply Current -
µ
A
V
DD
= 2.7 V
V
DD
= 5.5 V
All Channels Powered, No Load
255
T
A
- Free - Air Temperature -
∞
C
0
100
200
300
400
500
600
700
- 40
- 10
20
50
80
110
I
D
D
-
Supply Current
-
µ
A
V
DD
= 2.7 V
V
DD
= 5.5 V
All Channels Powered, No Load
V
DD
- Supply Voltage - V
200
250
300
350
400
450
500
550
600
650
700
2.7
3.1
3.5
3.9
4.3
4.7
5.1
5.5
I
D
D
-
Supply Current
-
µ
A
All DACs Powered, No Load
DAC5573
SLAS401 ≠ NOVEMBER 2003
TYPICAL CHARACTERISTICS (continued)
At T
A
= +25
∞
C, unless otherwise noted.
SINK CURRENT CAPABILITY
SOURCE CURRENT CAPABILITY
AT NEGATIVE RAIL
AT POSITIVE RAIL
Figure 13.
Figure 14.
SOURCE CURRENT CAPABILITY
SUPPLY CURRENT
AT POSITIVE RAIL
vs DIGITAL INPUT CODE
Figure 15.
Figure 16.
SUPPLY CURRENT
SUPPLY CURRENT
vs TEMPERATURE
vs SUPPLY VOLTAGE
Figure 17.
Figure 18.
8
www.ti.com
I
DD
- Current Consumption -
µ
A
0
500
1000
1500
2000
500 520 540 560 580 600 620 640 660 680 700 720 740
V
DD
= 5 V
Frequency
V
Logic
- Logic Input Voltage - V
200
400
600
800
1000
1200
0
1
2
3
4
5
I
D
D
- Supply Current -
µ
A
T
A
= 25
∞
C
A0 Input (All Other Inputs = GND)
V
DD
= 2.7 V
V
DD
= 5.5 V
-1
0
1
2
3
4
5
6
Time (2
µ
s/div)
V
O
U
T
- Output V
oltage - V
V
DD
= 5 V
Powerup to Code 250
I
DD
- Current Consumption -
µ
A
0
500
1000
1500
2000
400 420 440 460 480 500 520 540 560 580 600 620
V
DD
= 2.7 V
Frequency
0
1
2
3
4
5
Time (25
µ
s/div)
V
O
U
T
-
Output V
oltage
-
V
V
DD
= 5 V
Output Loaded with
200 pF to GND
10% to 90% FSR
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Time (25
µ
s/div)
V
O
U
T
-
Output V
oltage
-
V
V
DD
= 2.7 V
Output Loaded with
200 pF to GND
10% to 90% FSR
DAC5573
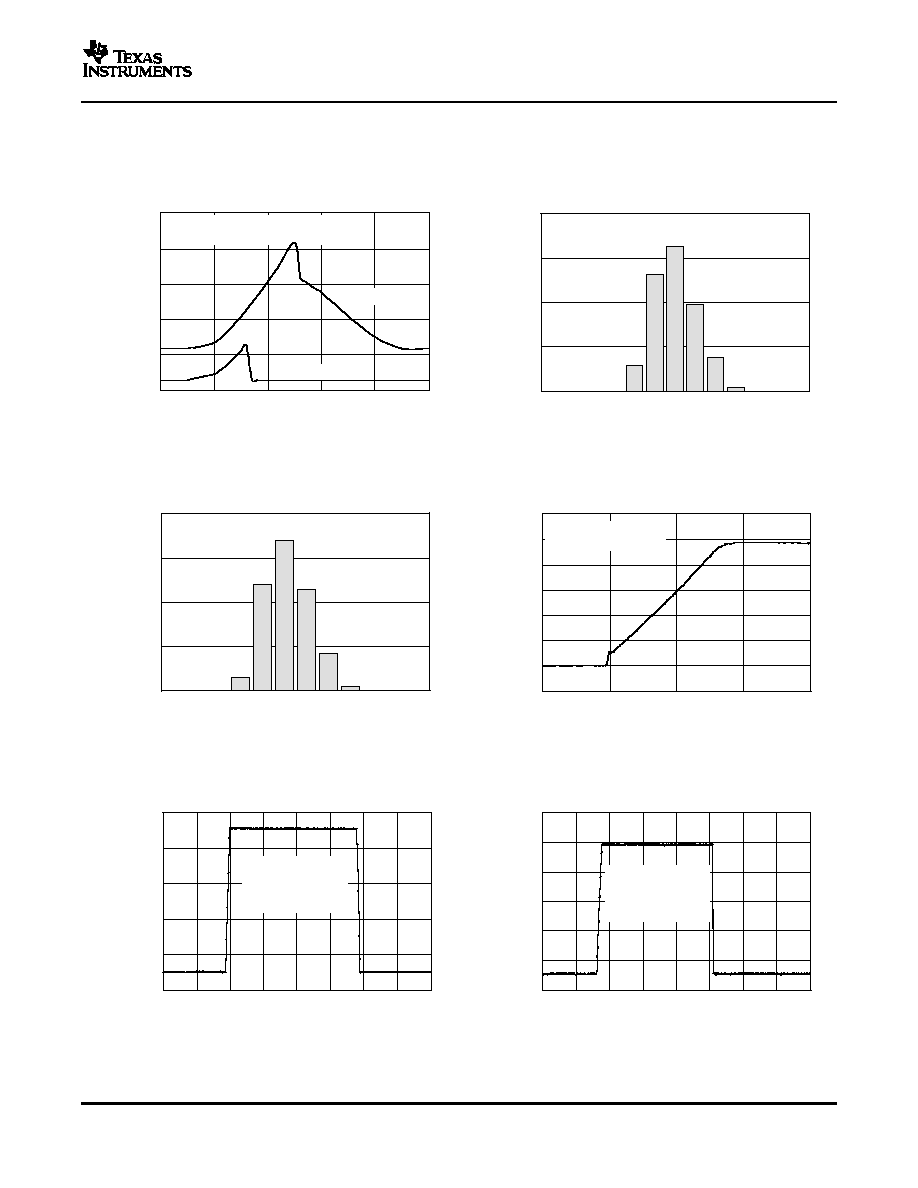
SLAS401 ≠ NOVEMBER 2003
TYPICAL CHARACTERISTICS (continued)
At T
A
= +25
∞
C, unless otherwise noted.
SUPPLY CURRENT
HISTOGRAM
vs LOGIC INPUT VOLTAGE
OF CURRENT CONSUMPTION
Figure 19.
Figure 20.
HISTOGRAM
EXITING
OF CURRENT CONSUMPTION
POWER-DOWN MODE
Figure 21.
Figure 22.
LARGE SIGNAL
LARGE SIGNAL
SETTLING TIME
SETTLING TIME
Figure 23.
Figure 24.
9

www.ti.com
0
4
8
12
16
20
24
0
32
64
96
128
160
192
224
Digital Input Code
Output Error (mV)
255
Channel A Output
Channel D Output
Channel B Output
Channel C Output
V
DD
= 5 V, T
A
= 25
∞
C
-6
-2
2
6
10
14
18
0
32
64
96
128
160
192
224
255
Channel A Output
V
DD
= 2.7 V, T
A
= 25
∞
C
Channel D Output
Channel C Output
Channel B Output
Digital Input Code
Output Error (mV)
Absolute error is the deviation from ideal DAC characteristics. It includes affects of offset, gain, and integral
DAC5573
SLAS401 ≠ NOVEMBER 2003
TYPICAL CHARACTERISTICS (continued)
At T
A
= +25
∞
C, unless otherwise noted.
ABSOLUTE ERROR
ABSOLUTE ERROR
Figure 25.
Figure 26.
linearity.
10

www.ti.com
THEORY OF OPERATION
D/A SECTION
_
+
Resistor String
Ref+
Ref-
DAC Register
V
OUT
50 k
W
50 k
W
V
REF
H
V
REF
L
70 k
W
V
OUT
+
2V
REF
L
)
(V
REF
H
*
V
REF
L)
D
256
RESISTOR STRING
V
REF
H
To Output
Amplifier
R
R
R
R
V
REF
L
Output Amplifier
I
2
C Interface
DAC5573
SLAS401 ≠ NOVEMBER 2003
The architecture of the DAC5573 consists of a string DAC followed by an output buffer amplifier. Figure 27
shows a generalized block diagram of the DAC architecture.
Figure 27. R-String DAC Architecture
The input coding to the DAC5573 is unsigned binary, which gives the ideal output voltage as:
Where D = decimal equivalent of the binary code that is loaded to the DAC register; it can range from 0 to 255.
The resistor string section is shown in Figure 28. It is basically a divide-by-2 resistor, followed by a string of
resistors, each of value R. The code loaded into the DAC register determines at which node on the string the
voltage is tapped off to be fed into the output amplifier by closing one of the switches connecting the string to the
amplifier. Because the architecture consists of a string of resistors, it is specified monotonic.
Figure 28. Typical Resistor String
The output buffer is a gain-of-2 noninverting amplifier, capable of generating rail-to-rail voltages on its output,
which gives an output range of 0V to V
DD
. It is capable of driving a load of 2 k
in parallel with 1000 pF to GND.
The source and sink capabilities of the output amplifier can be seen in the typical curves. The slew rate is 1 V/µs
with a half-scale settling time of 8 µs with the output unloaded.
I
2
C is a 2-wire serial interface developed by Philips Semiconductor (see I
2
C-Bus Specification, Version 2.1,
January 2000). The bus consists of a data line (SDA) and a clock line (SCL) with pullup structures. When the bus
is idle, both SDA and SCL lines are pulled high. All the I
2
C-compatible devices connect to the I
2
C bus through
open drain I/O pins, SDA and SCL. A master device, usually a microcontroller or a digital signal processor,
controls the bus. The master is responsible for generating the SCL signal and device addresses. The master also
generates specific conditions that indicate the START and STOP of data transfer. A slave device receives and/or
transmits data on the bus under control of the master device.
11

www.ti.com
F/S-Mode Protocol
H/S-Mode Protocol
Start
Condition
SDA
Stop
Condition
SDA
SCL
S
P
SCL
DAC5573
SLAS401 ≠ NOVEMBER 2003
THEORY OF OPERATION (continued)
The DAC5573 works as a slave and supports the following data transfer modes, as defined in the I
2
C-Bus
Specification: standard mode (100 kbps), fast mode (400 kbps), and high-speed mode (3.4 Mbps). The data
transfer protocol for standard and fast modes is exactly the same, therefore they are referred to as F/S-mode in
this document. The protocol for high-speed mode is different from the F/S-mode, and it is referred to as
H/S-mode. The DAC5573 supports 7-bit addressing; 10-bit addressing and general call address are not
supported.
∑
The master initiates data transfer by generating a start condition. The start condition is when a high-to-low
transition occurs on the SDA line while SCL is high, as shown in Figure 29. All I
2
C-compatible devices
recognize a start condition.
∑
The master then generates the SCL pulses, and transmits the 7-bit address and the read/write direction bit
R/W on the SDA line. During all transmissions, the master ensures that data is valid. A valid data condition
requires the SDA line to be stable during the entire high period of the clock pulse (see Figure 30). All devices
recognize the address sent by the master and compare it to their internal fixed addresses. Only the slave
device with a matching address generates an acknowledge (see Figure 31) by pulling the SDA line low
during the entire high period of the ninth SCL cycle. Upon detecting this acknowledge, the master knows that
communication link with a slave has been established.
∑
The master generates further SCL cycles to either transmit data to the slave (R/W bit 1) or receive data from
the slave (R/W bit 0). In either case, the receiver must acknowledge the data sent by the transmitter. So an
acknowledge signal can either be generated by the master or by the slave, depending on which one is the
receiver. 9-bit valid data sequences consisting of 8-bit data and 1-bit acknowledge can continue as long as
necessary.
∑
To signal the end of the data transfer, the master generates a stop condition by pulling the SDA line from low
to high while the SCL line is high (see Figure 29). This releases the bus and stops the communication link
with the addressed slave. All I
2
C-compatible devices must recognize the stop condition. Upon the receipt of a
stop condition, all devices know that the bus is released, and they wait for a start condition followed by a
matching address.
∑
When the bus is idle, both SDA and SCL lines are pulled high by the pullup devices.
∑
The master generates a start condition followed by a valid serial byte containing H/S master code
00001XXX. This transmission is made in F/S mode at no more than 400 Kbps. No device is allowed to
acknowledge the H/S master code, but all devices must recognize it and switch their internal setting to
support 3.4 Mbps operation.
∑
The master then generates a repeated start condition (a repeated start condition has the same timing as the
start condition). After this repeated start condition, the protocol is the same as F/S-mode, except that
transmission speeds up to 3.4 Mbps are allowed. A stop condition ends the H/S-mode and switches all the
internal settings of the slave devices to support the F/S-mode. Instead of using a stop condition, repeated
start conditions must be used to secure the bus in H/S-mode.
Figure 29. START and STOP Conditions
12

www.ti.com
Change of Data Allowed
Data Line
Stable;
Data Valid
SDA
SCL
Not Acknowledge
Acknowledge
1
2
8
9
Clock Pulse for
Acknowledgement
S
START
Condition
Data Output
by Transmitter
Data Output
by Receiver
SCL From
Master
Recognize START or
REPEATED START
Condition
Recognize STOP or
REPEATED START
Condition
Generate ACKNOWLEDGE
Signal
Acknowledgement
Signal From Slave
SDA
SCL
MSB
P
Sr
Sr
or
P
S
or
Sr
START or
Repeated START
Condition
STOP or
Repeated START
Condition
Clock Line Held Low While
Interrupts are Serviced
1
2
7
8
9
ACK
1
2
3 - 8
9
ACK
Address
R/W
DAC5573
SLAS401 ≠ NOVEMBER 2003
THEORY OF OPERATION (continued)
Figure 30. Bit Transfer on the I
2
C Bus
Figure 31. Acknowledge on the I
2
C Bus
Figure 32. Bus Protocol
13

www.ti.com
DAC5573 I
2
C Update Sequence
Address Byte
Broadcast Address Byte
DAC5573
SLAS401 ≠ NOVEMBER 2003
The DAC5573 requires a start condition, a valid I
2
C address, a control byte, an MSB byte, and an LSB byte for a
single update. After the receipt of each byte, DAC5573 acknowledges by pulling the SDA line low during the high
period of a single clock pulse. A valid I
2
C address selects the DAC5573. The control byte sets the operational
mode of the selected DAC5573. Once the operational mode is selected by the control byte, DAC5573 expects an
MSB byte followed by an LSB byte for data update to occur. DAC5573 performs an update on the falling edge of
the acknowledge signal that follows the LSB byte.
The control byte needs not to be resent until a change in operational mode is required. The bits of the control
byte continuously determine the type of update performed. Thus, for the first update, DAC5573 requires a start
condition, a valid I
2
C address, a control byte, an MSB byte and an LSB byte. For all consecutive updates,
DAC5573 needs an MSB byte, and an LSB byte as long as the control command remains the same. MSB byte
contains DAC data LSB byte contains 8 don't care bits.
Using the I
2
C high-speed mode (f
scl
= 3.4 MHz), the clock running at 3.4 MHz, each 8-bit DAC update other than
the first update can be done within 18 clock cycles (MSB byte, acknowledge signal, LSB byte, acknowledge
signal), at 188.88 kSPS. Using the fast mode (f
scl
= 400 kHz), clock running at 400 kHz, maximum DAC update
rate is limited to 22.22 kSPS. Once a stop condition is received, DAC5573 releases the I
2
C bus and awaits a
new start condition.
MSB
LSB
1
0
0
1
1
A1
A0
R/W
The address byte is the first byte received following the START condition from the master device. The first five
bits (MSBs) of the address are factory preset to 10011. The next two bits of the address are the device select
bits A1 and A0. The A1, A0 address inputs can be connected to V
DD
or digital GND, or can be actively driven by
TTL/CMOS logic levels. The device address is set by the state of these pins during the power-up sequence of
the DAC5573. Up to 16 devices (DAC5573) can still be connected to the same I
2
C-bus.
MSB
LSB
1
0
0
1
0
0
0
0
Broadcast addressing is also supported by DAC5573. Broadcast addressing can be used for synchronously
updating or powering down multiple DAC5573 devices. DAC5573 is designed to work with other members of the
DAC857x and DAC757x families to support multichannel synchronous update. Using the broadcast address,
DAC5573 responds regardless of the states of the address pins. Broadcast is supported only in write mode
(master writes to DAC5573).
14

www.ti.com
Control Byte
DAC5573
SLAS401 ≠ NOVEMBER 2003
MSB
LSB
A3
A2
L1
L0
X
Sel1
Sel0
PD0
Table 1. Control Register Bit Descriptions
Bit Name
Bit Number/Description
A3
Extended address bit
The state of these bits must match the state of pins A3 and A2 in order for a proper
DAC5573 data update, except in broadcast update mode.
A2
Extended address bit
L1
Load1 (mode select) bit
Are used for selecting the update mode.
L2
Load0 (mode select) bit
00
Store I
2
C data. The contents of MS-BYTE and LS-BYTE (or power down information) are stored in the
temporary register of a selected channel. This mode does not change the DAC output of the selected
channel.
01
Update selected DAC with I
2
C data. Most commonly utilized mode. The contents of MS-BYTE and
LS-BYTE (or power down information) are stored in the temporary register and in the DAC register of
the selected channel. This mode changes the DAC output of the selected channel with the new data.
10
4-channel synchronous update. The contents of MS-BYTE and LS-BYTE (or power down information)
are stored in the temporary register and in the DAC register of the selected channel. Simultaneously,
the other three channels get updated with previously stored data from the temporary register. This
mode updates all four channels together.
11
Broadcast update mode. This mode has two functions. In broadcast mode, DAC5573 responds
regardless of local address matching, and channel selection becomes irrelevant as all channels update.
This mode is intended to enable up to 64 channels simultaneous update, if used with the I
2
C broadcast
address (1001 0000).
If Sel1=0
All four channels are updated with the contents of their temporary register data.
If Sel1=1
All four channels are updated with the MS-BYTE and LS-BYTE data or powerdown.
Sel1
Buff Sel1 Bit
Channel select bits
Sel0
Buff Sel0 Bit
00
Channel A
01
Channel B
10
Channel C
11
Channel D
PD0
Power Down Flag
0
Normal operation
1
Power-down flag (MSB7 and MSB6 indicate a power-down operation, as shown in Table 2).
15
www.ti.com
Most Significant Byte
Least Significant Byte
Default Readback Condition
DAC5573
SLAS401 ≠ NOVEMBER 2003
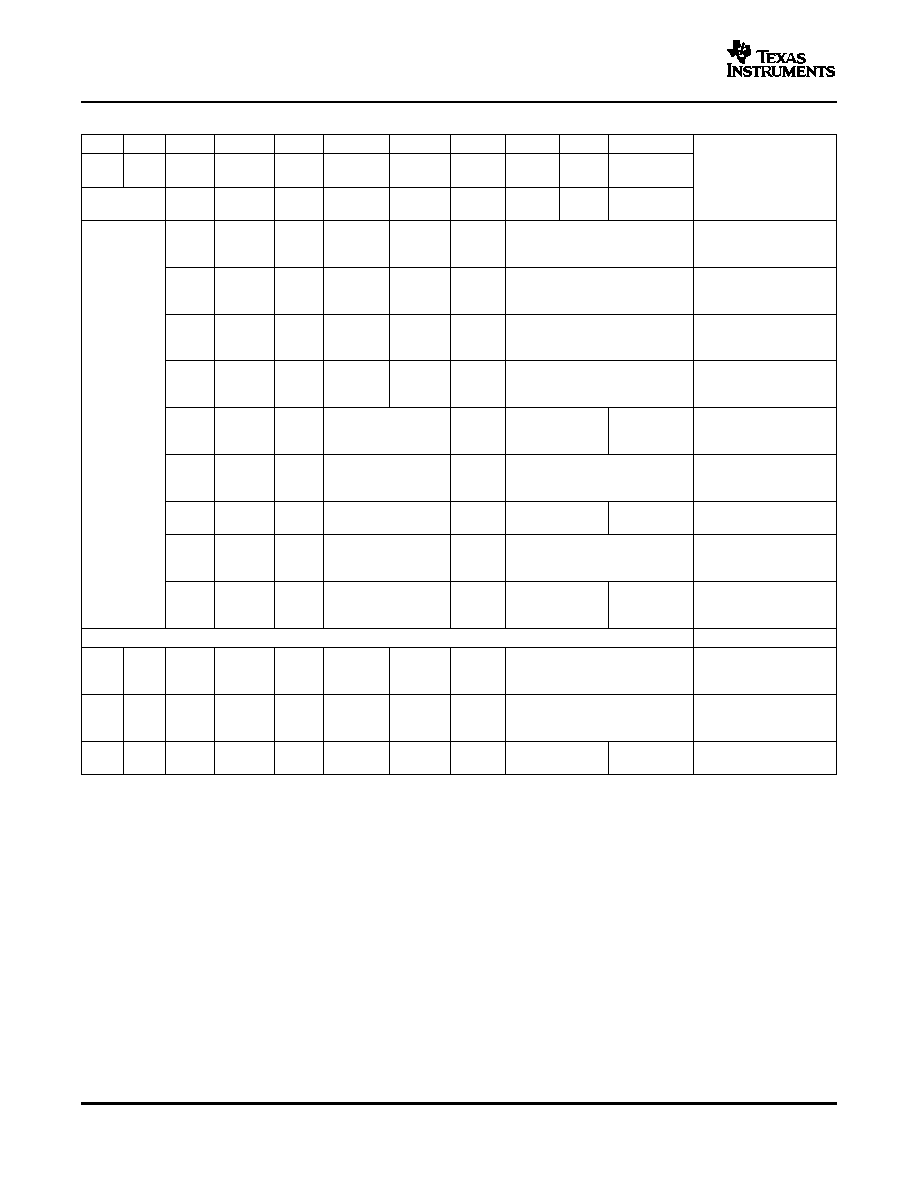
Table 2. Control Byte
C7
C6
C5
C4
C3
C2
C1
C0
MSB7
MSB6
MSB5...
Don't
MSB
MSB-1
A3
A2
Load1
Load0
Ch Sel 1
Ch Sel 0
PD0
MSB-2 ...LSB
Care
(PD1)
(PD2)
DESCRIPTION
(Address
Select)
(A3 and A2
0
0
X
0
0
0
Data
Write to temporary
should corre-
register A (TRA) with
spond to the
data
package ad-
Write to temporary
dress, set via
0
0
X
0
1
0
Data
register B (TRB) with
pins A3 and
data
A2)
Write to temporary
0
0
X
1
0
0
Data
register C (TRC) with
data
Write to temporary
0
0
X
1
1
0
Data
register D (TRD) with
data
(00, 01, 10, or 11)
Write to TRx (selected
0
0
X
1
See Table 8
0
by C2 &C1
w/Powerdown Command
(00, 01, 10, or 11)
Write to TRx (selected
0
1
X
0
Data
by C2 &C1 and load
DACx w/data
(00, 01, 10, or 11)
Power-down DACx
0
1
X
1
See Table 8
0
(selected by C2 and C1)
(00, 01, 10, or 11)
Write to TRx (selected
1
0
X
0
Data
by C2 &C1 w/ data and
load all DACs
(00, 01, 10, or 11)
Power-down DACx
1
0
X
1
See Table 8
0
(selected by C2 and C1)
& load all DACs
Broadcast Modes (controls up to 4 devices on a single serial bus)
Update all DACs, all
X
X
1
1
X
0
X
X
X
devices with previously
stored TRx data
Update all DACs, all
X
X
1
1
X
1
X
0
Data
devices with MSB[7:0]
and LSB[7:0] data
Power-down all DACs,
X
X
1
1
X
1
X
1
See Table 8
0
all devices
Most significant byte MSB[7:0] consists of eight most significant bits of 8-bit unsigned binary D/A conversion
data. C0=1, MSB[7], MSB[6] indicate a power-down operation as shown in Table 8.
Least significant byte LSB[7:0] consists of the 8 don't care bits. DAC5573 updates at the falling edge of the
acknowledge signal that follows the LSB[0] bit. Therefore, the LS byte is needed for the update to occur.
If the user initiates a readback of a specified channel without first writing data to that specified channel, the
default readback is all zeros, since the readback register is initialized to 0 during the power on reset phase.
16

www.ti.com
LDAC Functionality
DAC5573 Registers
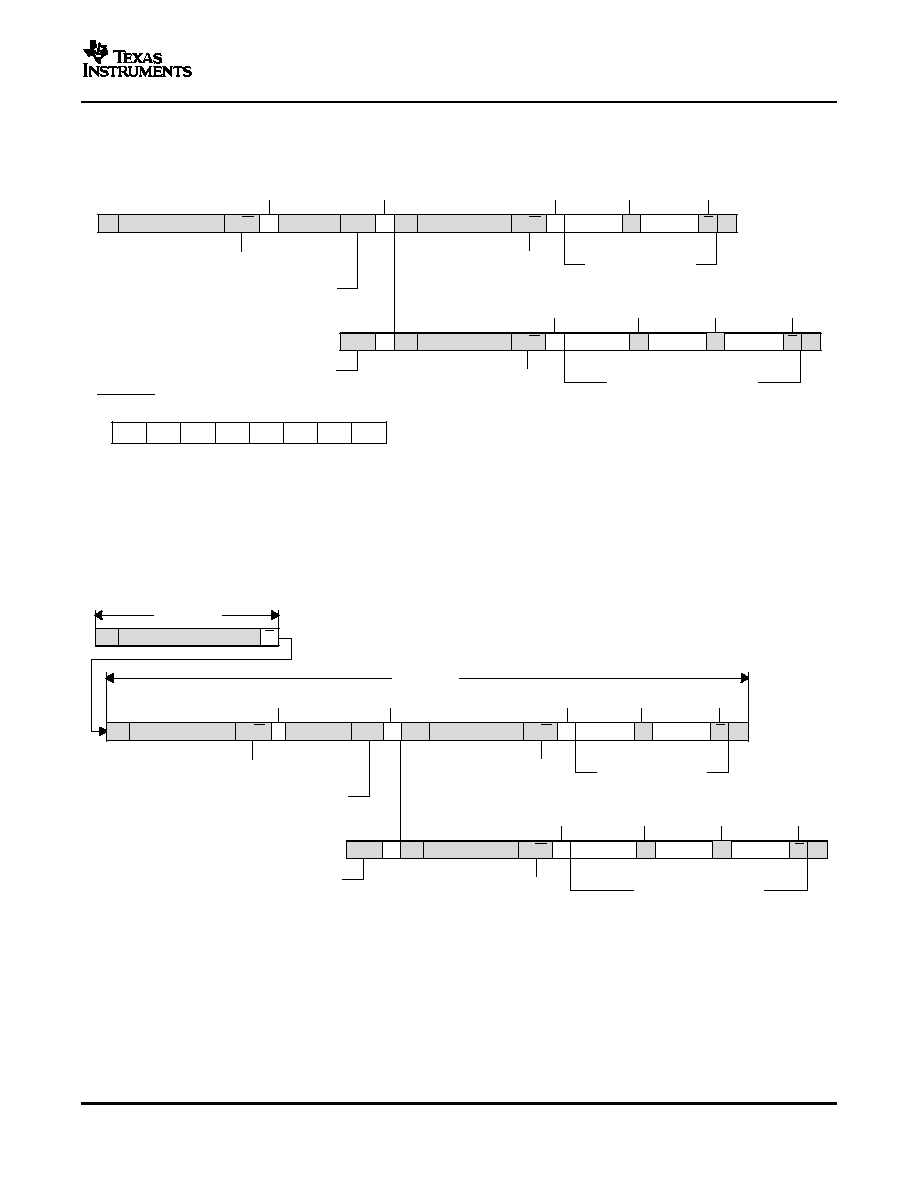
DAC5573 as a Slave Receiver--Standard and Fast Mode
SLAVE ADDRESS R/W
A Ctrl-Byte
A MS-Byte A
LS-Byte
A/A
P
0 (write)
Data Transferred
(n* Words + Acknowledge)
Word = 16 Bit
From Master to DAC5573
From DAC5573 to Master
A = Acknowledge (SDA LOW)
A = Not Acknowledge (SDA HIGH)
S = START Condition
Sr = Repeated START Condition
P = STOP Condition
DAC5573 I
2
C-SLAVE ADDRESS:
1
0
0
1
1
A1
A0
R/W
MSB
LSB
Factory Preset
A0 = I
2
C Address Pin
A1 = I
2
C Address Pin
S
0 = Write to DAC5573
1 = Read from DAC5573
DAC5573
SLAS401 ≠ NOVEMBER 2003
Depending on the control byte, DACs are synchronously updated on the falling edge of the acknowledge signal
that follows LS byte. The LDAC pin is required only when an external timing signal is used to update all the
channels of the DAC asynchronously. LDAC is a positive edge triggered asynchronous input that allows four
DAC output voltages to be updated simultaneously with temporary register data. The LDAC trigger should only
be used after the buffer's temporary registers are properly updated through software.
Table 3. DAC5573 Architecture Register Descriptions
REGISTER
DESCRIPTION
CTRL[7:0]
Stores 8-bit wide control byte sent by the master
MSB[7:0]
Stores the 8 most significant bits of unsigned binary data sent by the master. Can also store 2-bit power-down data.
TRA[9:0], TRB[9:0],
10-bit temporary storage registers assigned to each channel. Two MSBs store power-down information, 8 LSBs
TRC[9:0], TRD[9:0]
store data.
DRA[9:0], DRB[9:0],
10-bit DAC registers for each channel. Two MSBs store power-down information, 8 LSBs store DAC data. An
DRC[9:0], DRD[9:0]
update of this register means a DAC update with data or power down.
Figure 33 shows the standard and fast mode master transmitter addressing a DAC5573 Slave Receiver with a
7-bit address.
Figure 33. Standard and Fast Mode: Slave Receiver
17

www.ti.com
DAC5573 as a Slave Receiver--High-Speed Mode
HS-Master Code
R/W
A Ctrl-Byte
A MS-Byte A
LS-Byte
A/A
P
0 (write)
Data Transferred
(n* Words + Acknowledge)
Word = 16 Bit
S
A Sr Slave Address
HS-Mode Continues
F/S-Mode
HS-Mode
F/S-Mode
Sr Slave Address
0
0
0
0
1
X
X
R/W
MSB
LSB
HS-Mode Master Code:
A3
A2
L1
L0
X
Sel1 Sel2 PD0
MSB
LSB
Control Byte:
A3
= Extended Address Bit
A2
= Extended Address Bit
L1
= Load1 (Mode Select) Bit
L0
= Load0 (Mode Select) Bit
Sel1 = Buff Sel1 (Channel) Select Bit
Sel0 = Buff Sel0 (Channel) Select Bit
PD0 = Power Down Flag
D7
D6
D5
D4
D3
D2
D1
D0
MSB
LSB
MS-Byte:
X
X
X
X
X
X
X
X
MSB
LSB
LS-Byte:
D11 - D0 = Data Bits
X = Don't Care
DAC5573
SLAS401 ≠ NOVEMBER 2003
Figure 34 shows the high-speed mode master transmitter addressing a DAC5573 Slave Receiver with a 7-bit
address.
Figure 34. High-Speed Mode: Slave Receiver
18

www.ti.com
Master Transmitter Writing to a Slave Receiver (DAC5573) in Standard/Fast Modes
DAC5573
SLAS401 ≠ NOVEMBER 2003
All write access sequences begin with the device address (with R/W = 0) followed by the control byte. This
control byte specifies the operation mode of DAC5573 and determines which channel of DAC5573 is being
accessed in the subsequent read/write operation. The LSB of the control byte (PD0-Bit) determines whether the
following data is power-down data or regular data.
With (PD0-Bit = 0) the DAC5573 expects to receive data in the following sequence HIGH-BYTE ≠LOW-BYTE ≠
HIGH-BYTE ≠ LOW-BYTE..., until a STOP Condition or REPEATED START Condition on the I
2
C bus is
recognized (refer to the DATA INPUT MODE section of Table 4).
With (PD0-Bit = 1) the DAC5573 expects to receive 2 bytes of power-down data (refer to the POWER DOWN
MODE section of Table 4).
Table 4. Write Sequence in F/S Mode
DATA INPUT MODE
Transmitter
MSB
6
5
4
3
2
1
LSB
Comment
Master
Start
Begin sequence
Master
1
0
0
1
1
A1
A0
R/W
Write addressing (R/W=0)
DAC5573
DAC5573 Acknowledges
Master
A3
A2
Load 1
Load 0
x
Buff Sel 1
Buff Sel 0
PD0
Control byte (PD0=0)
DAC5573
DAC5573 Acknowledges
Master
D7
D6
D5
D4
D3
D2
D1
D0
Writing data word, high byte
DAC5573
DAC5573 Acknowledges
Master
x
x
x
x
x
x
x
x
Writing data word, low byte
DAC5573
DAC5573 Acknowledges
Master
Data or Stop or Repeated Start
(1)
Data or done
(2)
POWER DOWN MODE
Transmitter
MSB
6
5
4
3
2
1
LSB
Comment
Master
Start
Begin sequence
Master
1
0
0
1
1
A1
A0
R/W
Write addressing (R/W=0)
DAC5573
DAC5573 Acknowledges
Master
A3
A2
Load 1
Load 0
x
Buff Sel 1
Buff Sel 0
PD0
Control byte (PD0 = 1)
DAC5573
DAC5573 Acknowledges
Master
PD1
PD2
0
0
0
0
0
0
Writing data word, high byte
DAC5573
DAC5573 Acknowledges
Master
x
x
x
x
x
x
x
x
Writing data word, low byte
DAC5573
DAC5573 Acknowledges
Master
Stop or Repeated Start
(1)
Done
(1)
Use repeated START to secure bus operation and loop back to the stage of write addressing for next Write.
(2)
Once DAC5573 is properly addressed and control byte is sent, HIGH-BYTE-LOW-BYTE sequences can repeat until a STOP condition
or repeated START condition is received.
19

www.ti.com
Master Transmitter Writing to a Slave Receiver (DAC5573) in HS Mode
DAC5573
SLAS401 ≠ NOVEMBER 2003
When writing data to the DAC5573 in HS-mode, the master begins to transmit what is called the HS-Master
Code (0000 1XXX) in F/S-mode. No device is allowed to acknowledge the HS-Master Code, so the HS-Master
Code is followed by a NOT acknowledge.
The master then switches to HS-mode and issues a repeated start condition, followed by the address byte (with
R/W = 0) after which the DAC5573 acknowledges by pulling SDA low. This address byte is usually followed by
the control byte, which is also acknowledged by the DAC5573. The LSB of the control byte (PD0-Bit) determines
if the following data is power-down data or regular data.
With (PD0-Bit = 0) the DAC5573 expects to receive data in the following sequence HIGH-BYTE ≠ LOW-BYTE ≠
HIGH-BYTE ≠ LOW-BYTE...., until a STOP condition or repeated start condition on the I
2
C bus is recognized
(refer to Table 5 HS-MODE WRITE SEQUENCE - DATA).
With (PD0-Bit = 1) the DAC5573 expects to receive 2 bytes of power-down data (refer to Table 5 HS-MODE
WRITE SEQUENCE - POWER DOWN).
Table 5. Master Transmitter Writes to Slave Receiver (DAC5573) in HS-Mode
HS MODE WRITE SEQUENCE - DATA
Transmitter
MSB
6
5
4
3
2
1
LSB
Comment
Master
Start
Begin sequence
Master
0
0
0
0
1
X
X
X
HS mode master code
No device may acknowledge HS mas-
NONE
Not acknowledge
ter code
Master
Repeated start
Master
1
0
0
1
1
A1
A0
R/W
Write addressing (R/W=0)
DAC5573
DAC5573 acknowledges
Master
0
0
Load 1
Load 0
0
Buff Sel 1
Buff Sel 0
PD0
Control byte (PD0=0)
DAC5573
DAC5573 acknowledges
Master
D7
D6
D5
D4
D3
D2
D1
D0
Writing data word, MSB
DAC5573
DAC5573 acknowledges
Master
x
x
x
x
x
x
x
x
Writing data word, LSB
DAC5573
DAC5573 acknowledges
Master
Data or stop or repeated start
(1)
Data or done
(2)
HS MODE WRITE SEQUENCE - POWER DOWN
Transmitter
MSB
6
5
4
3
2
1
LSB
Comment
Master
Start
Begin sequence
Master
0
0
0
0
1
X
X
X
HS mode master code
No device may acknowledge HS mas-
NONE
Not acknowledge
ter code
Master
Repeated start
Master
1
0
0
1
1
A1
A0
R/W
Write addressing (R/W = 0)
DAC5573
DAC5573 acknowledges
Master
0
0
Load 1
Load 2
0
Buff Sel 1
Buff Sel 0
PD0
Control byte (PD0=1)
DAC5573
DAC5573 acknowledges
Master
PD1
PD2
0
0
0
0
0
0
Writing data word, high byte
DAC5573
DAC5573 acknowledges
Master
x
x
x
x
x
x
x
x
Writing data word, low byte
DAC5573
DAC5573 acknowledges
Master
Stop or repeated start
(1)
Done
(1)
Use repeated start to secure bus operation and loop back to the stage of write addressing for next Write.
(2)
Once DAC5573 is properly addressed and control byte is sent, high-byte-low-byte sequences can repeat until a stop or repeated start
condition is received.
20
www.ti.com
DAC5573 as a Slave Transmitter--Standard and Fast Mode
SLAVE ADDRESS R/W
A Ctrl <7:1>
A
MS-Byte A
LS-Byte
A P
0 (write)
Data Transferred
(2 Bytes + Acknowledge)
PDN-Byte:
PD1
PD2
1
1
1
1
1
1
MSB
LSB
S
PD0
Sr Slave Address
R/W A
1 (read)
0 = (Normal Mode)
A
PDN-Byte A
LS-Byte
A P
PD0
Sr Slave Address
R/W
A
MS-Byte A
(DAC5573)
(MASTER)
(MASTER)
1 = (Power Down Flag)
Data Transferred
(3 Bytes + Acknowledge)
(DAC5573)
(MASTER)
(MASTER)
(MASTER)
PD1 = Power Down Bit
PD2 = Power Down Bit
1 (read)
(DAC5573)
(DAC5573)
DAC5573 as a Slave Transmitter--High-Speed Mode
Slave Address
R/W A Ctrl <7:1>
A
MS-Byte A
LS-Byte
A P
0 (write)
Data Transferred
(2 Bytes + Acknowledge)
PD0
Sr
Slave Address
R/W A
1 (read)
0 = (Normal Mode)
A
PDN-Byte A
LS-Byte
A P
PD0
Sr Slave Address
R/W
A
MS-Byte A
(DAC5573)
(DAC5573)
(DAC5573)
(MASTER)
(MASTER)
1 = (Power Down Flag)
Data Transferred
(3 Bytes + Acknowledge)
(DAC5573)
(MASTER)
(MASTER)
(MASTER)
Sr
HS-Mode
A
S
F/S-Mode
1 (read)
HS-Master Code
DAC5573
SLAS401 ≠ NOVEMBER 2003
Figure 35 shows the standard and fast mode master receiver addressing a DAC5573 Slave Transmitter with a
7-bit address.
Figure 35. Standard and Fast Mode: Slave Transmitter
Figure 36 shows an I
2
C-Master addressing DAC5573 in high-speed mode (with a 7-bit address), as a Slave
Transmitter.
Figure 36. High-Speed Mode: Slave Transmitter
21
www.ti.com
Master Receiver Reading From a Slave Transmitter (DAC5573) in Standard/Fast Modes
DAC5573
SLAS401 ≠ NOVEMBER 2003
When reading data back from the DAC5573, the user begins with an address byte (with R/W = 0) after which the
DAC5573 acknowledges by pulling SDA low. This address byte is usually followed by the control byte, which is
also acknowledged by the DAC5573. Following this there is a REPEATED START condition by the master and
the address is resent with (R/W = 1). This is acknowledged by the DAC5573, indicating that it is prepared to
transmit data. Two or three bytes of data are then read back from the DAC5573, depending on the (PD0-Bit).
The value of Buff-Sel1 and Buff-Sel0 determines, which channel data is read back. A STOP condition follows.
With the (PD0-Bit = 0) the DAC5573 transmits 2 bytes of data, HIGH-BYTE followed by the LOW-BYTE (refer to
Table 6. Data Readback Mode - 2 bytes).
With the (PD0-Bit = 1) the DAC5573 transmits 3 bytes of data, POWER-DOWN-BYTE followed by the
HIGH-BYTE followed by the LOW-BYTE (refer to Table 6. Data Readback Mode - 3 bytes).
Table 6. Read Sequence in F/S Mode
DATA READBACK MODE - 2 BYTES
Transmitter
MSB
6
5
4
3
2
1
LSB
Comment
Master
Start
Begin sequence
Master
1
0
0
1
1
A1
A0
R/W
Write addressing (R/W=0)
DAC5573
DAC5573 acknowledges
Master
A3
A2
Load 1
Load 0
x
Buff Sel 1
Buff Sel 0
PD0
Control byte (PD0=0)
DAC5573
DAC5573 acknowledges
Master
Repeated start
Master
1
0
0
1
1
A1
A0
R/W
Read addressing (R/W = 1)
DAC5573
DAC5573 acknowledges
DAC5573
D7
D6
D5
D4
D3
D2
D1
D0
Reading data word, high byte
Master
Master acknowledges
DAC5573
x
x
x
x
x
x
x
x
Reading data word, low byte
Master
Master not acknowledges
Master signal end of read
Master
Stop or repeated start
(1)
Done
DATA READBACK MODE - 3 BYTES
Transmitter
MSB
6
5
4
3
2
1
LSB
Comment
Master
Start
Begin sequence
Master
1
0
0
1
1
A1
A0
R/W
Write addressing (R/W=0)
DAC5573
DAC5573 acknowledges
Master
A3
A2
Load 1
Load 0
x
Buff Sel 1
Buff Sel 0
PD0
Control byte (PD0=1)
DAC5573
DAC5573 acknowledges
Master
Repeated start
Master
1
0
0
1
1
A1
A0
R/W
Read addressing (R/W = 1)
DAC5573
DAC5573 acknowledges
DAC5573
PD1
PD2
1
1
1
1
1
1
Read power down byte
Master
Master acknowledges
DAC5573
D7
D6
D5
D4
D3
D2
D1
D0
Reading data word, high byte
Master
Master acknowledges
DAC5573
x
x
x
x
x
x
x
x
Reading data word, low byte
Master
Master not acknowledges
Master signal end of read
Master
Stop or repeated start
(1)
Done
(1)
Use repeated start to secure bus operation and loop back to the stage of write addressing for next Write.
22

www.ti.com
Master Receiver Reading From a Slave Transmitter (DAC5573) in HS-Mode
Power-On Reset
Power-Down Modes
DAC5573
SLAS401 ≠ NOVEMBER 2003
When reading data to the DAC5573 in HS-MODE, the master begins to transmit, what is called the HS-Master
Code (0000 1XXX) in F/S mode. No device is allowed to acknowledge the HS-Master Code, so the HS-Master
Code is followed by a NOT acknowledge.
The master then switches to HS mode and issues a REPEATED START condition, followed by the address byte
(with R/W = 0) after which the DAC5573 acknowledges by pulling SDA low. This address byte is usually followed
by the control byte, which is also acknowledged by the DAC5573.
Then there is a REPEATED START condition initiated by the master and the address is resent with (R/W = 1).
This is acknowledged by the DAC5573, indicating that it is prepared to transmit data. Two or three bytes of data
are then read back from the DAC5573, depending on the (PD0-Bit). The value of Buff-Sel1 and Buff-Sel0
determines, which channel data is read back. A STOP condition follows.
With the (PD0-Bit = 0) the DAC5573 transmits 2 bytes of data, HIGH-BYTE followed by LOW-BYTE (refer to
Table 7 HS-Mode Readback Sequence).
With the (PD0-Bit = 1) the DAC5573 transmits 3 bytes of data, POWER-DOWN-BYTE followed by the
HIGH-BYTE followed by the LOW-BYTE (refer to Table 7 HS-Mode Readback Sequence).
Table 7. Master Receiver Reading Slave Transmitter (DAC5573) in HS-Mode
HS MODE READBACK SEQUENCE
Transmitter
MSB
6
5
4
3
2
1
LSB
Comment
Master
Start
Begin sequence
Master
0
0
0
0
1
X
X
X
HS mode master code
No device may acknowledge HS
NONE
Not acknowledge
master code
Master
Repeated start
Master
1
0
0
1
1
A1
A0
R/W
Write addressing (R/W=0)
DAC5573
DAC5573 acknowledges
Master
A3
A2
Load 1
Load 0
X
Buff Sel 1
Buff Sel 0
PD0
Control byte (PD0 = 1)
DAC5573
DAC5573 acknowledges
Master
Repeated start
Master
1
0
0
1
1
A1
A0
R/W
Read addressing (R/W=1)
DAC5573
DAC5573 acknowledges
DAC5573
PD1
PD2
1
1
1
1
1
1
Power-down byte
Master
Master acknowledges
DAC5573
D7
D6
D5
D4
D3
D2
D1
D0
Reading data word, high byte
Master
Master acknowledges
DAC5573
x
x
x
x
x
x
x
x
Reading data word, low byte
Master
Master not acknowledges
Master signal end of read
Master
Stop or repeated start
Done
The DAC5573 contains a power-on-reset circuit that controls the output voltage during power up. On power up,
the DAC register is filled with zeros and the output voltage is 0 V; it remains there until a valid write sequence is
made to the DAC. This is useful in applications where it is important to know the state of the output of the DAC
while it is in the process of powering up. Device pins must not be brought high before supply is applied.
The DAC5573 contains four separate power-down modes of operation. The modes are programmable via two
most significant bits of the MSB byte, while (CTRL[0] = PD0 = 1). Table 8 shows how the state of these bits
corresponds to the mode of operation of the device.
23

www.ti.com
Resistor
String DAC
Powerdown
Circuitry
V
OUT
Amplifier
Resistor
Network
CURRENT CONSUMPTION
DAC5573
SLAS401 ≠ NOVEMBER 2003
Table 8. Power-Down Modes of Operation for the DAC5573
CTRL[0]
MSB[7]
MSB[6]
OPERATING MODE
1
0
0
PWD, high impedance DAC output
1
0
1
PWD, 1 k
to GND DAC ouptut
1
1
0
PWD, 100 k
to GND DAC output
1
1
1
PWD, high impedance DAC output
When (CTRL[0] = PD0 = 0), the device works normally with its normal power consumption of 150 µA at 5 V per
channel. However, for the power-down modes, the supply current falls to 200 nA at 5 V (50 nA at 3 V). Not only
does the supply current fall but also the output stage is also internally switched from the output of the amplifier to
a resistor network of known values. This has the advantage that the output impedance of the device is known
while in power-down mode. There are three different options: The output is connected internally to GND through
a 1 k
resistor, a 100 k
resistor or left open-circuit (high impedance). The output stage is illustrated in
Figure 37.
Figure 37. Output Stage During Power Down
All linear circuitry is shut down when the power-down mode is activated. However, the contents of the DAC
register are unaffected when in power-down. The time to exit power down is typically 2.5 µs for V
DD
= 5 V and 5
µs for V
DD
= 3 V. (See the Typical Curves section for additional information.)
The DAC5573 offers a flexible power-down interface based on channel register operation. A channel consists of
a single 8-bit DAC with power-down circuitry, a temporary storage register (TR) and a DAC register (DR). TR and
DR are both 10 bits wide. Two MSBs represent the power-down condition and the 8 LSBs represent data for TR
and DR. By using bits 9 and 8 of TR and DR, a power-down condition can be temporarily stored and used just
like data. Internal circuits ensure that MSB[7] and MSB[6] get transferred to TR[9] and TR[8] (DR[9] and DR[8])
when the power-down flag (CTRL[0] = PD0) is set. Therefore, DAC5573 treats power-down conditions like data
and all the operational modes are still valid for power down. It is possible to broadcast a power-down condition to
all the DAC5573s in the system, or it is possible to simultaneously power down a channel while updating data on
other channels.
The DAC5573 typically consumes 150 µA at V
DD
= 5 V and 125 µA at V
DD
= 3 V for each active channel,
including reference current consumption. Additional current consumption can occur at the digital inputs if V
IH
<<
V
DD
. For most efficient power operation, CMOS logic levels are recommended at the digital inputs to the DAC. In
power-down mode, typical current consumption is 200 nA.
24

www.ti.com
IOV
DD
AND VOLTAGE TRANSLATORS
DRIVING RESISTIVE AND CAPACITIVE LOADS
CROSSTALK
OUTPUT VOLTAGE STABILITY
SETTLING TIME AND OUTPUT GLITCH PERFORMANCE
DAC5573
SLAS401 ≠ NOVEMBER 2003
IOV
DD
pin powers the digital input structures of the DAC5573. For single-supply operation, IOV
DD
can be tied to
V
DD
. For dual-supply operation, the IOV
DD
pin provides interface flexibility with various CMOS logic famil-
ies--connect it to the logic supply of the system. Analog circuits and internal logic of the DAC5573 use V
DD
as
the supply voltage. The external logic high inputs get translated to V
DD
by level shifters. These level shifters use
the IOV
DD
voltage as a reference to shift the incoming logic HIGH levels to V
DD
. IOV
DD
operates from 2.7 V to 5.5
V regardless of the V
DD
voltage, ensuring compatibility with various logic families. Although specified down to 2.7
V, IOV
DD
operates as low as 1.8 V with degraded timing and temperature performance. For lowest power
consumption, ensure that logic V
IH
levels are as close as possible to IOV
DD
, and logic V
IL
levels as close as
possible to GND voltages.
The DAC5573 output stage is capable of driving loads of up to 1000 pF while remaining stable. Within the offset
and gain error margins, the DAC5573 can operate rail-to-rail when driving a capacitive load. Resistive loads of 2
k
can be driven by the DAC5573 while achieving a good load regulation. When the outputs of the DAC are
driven to the positive rail under resistive loading, the PMOS transistor of each Class-AB output stage can enter
into the linear region. When this occurs, the added IR voltage drop deteriorates the linearity performance of the
DAC. This only occurs within approximately the top 20 mV of the DAC's digital input-to-voltage output transfer
characteristic. The reference voltage applied to the DAC5573 may be reduced below the supply voltage applied
to V
DD
in order to eliminate this condition if good linearity is a requirement at full scale (under resistive loading
conditions).
The DAC5573 architecture uses separate resistor strings for each DAC channel in order to achieve ultra-low
crosstalk performance. DC crosstalk seen at one channel during a full-scale change on the neighboring channel
is typically less than 0.0025 LSBs. The ac crosstalk measured (for a full-scale, 1-kHz sine wave output generated
at one channel, and measured at the remaining output channel) is typically under ≠100 dB.
The DAC5573 exhibits excellent temperature stability of
±
3 ppm/
∞
C typical output voltage drift over the specified
temperature range of the device. This enables the output voltage of each channel to stay within a
±
25-µV window
for a
±
1
∞
C ambient temperature change. Combined with good dc noise performance and true 8-Bit differential
linearity, the DAC5573 becomes a perfect choice for closed-loop control applications.
Settling time to within the 8-bit accurate range of the DAC5573 is achievable within 6 µs for a full-scale code
change at the input. Worst case settling times between consecutive code changes is typically less than 2 µs. The
high-speed serial interface of the DAC5573 is designed in order to support up to 188-ksps update rate. For
full-scale output swings, the output stage of each DAC5573 channel typically exhibits less than 100 mV of
overshoot and undershoot when driving a 200 pF capacitive load. Code-to-code change glitches are extremely
low (~10 µV) given that the code-to-code transition does not cross an Nx16 code boundary. Due to internal
segmentation of the DAC5573, code-to-code glitches occur at each crossing of an Nx16 code boundary. These
glitches can approach 100 mVs for N = 15, but settle out within ~2 µs.
25

www.ti.com
APPLICATION INFORMATION
BASIC CONNNECTIONS
8
6
4
9
5
7
1
2
3
12
14
11
10
13
16
15
DAC5573
V
OUTA
V
OUTB
V
REFH
V
DD
V
REFL
GND
V
OUTC
V
OUTD
A3
A2
A1
A0
IOV
DD
SDA
SCL
L
DAC
SDA
SCL
I
2
C Pullup Resistors
1 k
to 10 k
(typical)
IOV
DD
Microcontroller or
Microprocessor With
I
2
C Port
NOTE: DAC5573 power and input/output connections are omitted for clarity, except I
2
C Inputs.
USING GPIO PORTS FOR I
2
C
DAC5573
SLAS401 ≠ NOVEMBER 2003
The following sections give example circuits and tips for using the DAC5573 in various applications. For more
information, contact your local TI representative, or visit the Texas Instruments website at http://www.ti.com.
For many applications, connecting the DAC5573 is extremely simple. A basic connection diagram for the
DAC5573 is shown in Figure 38. The 0.1 µF bypass capacitors provide the momentary bursts of extra current
needed from the supplies.
Figure 38. Typical DAC5573 Connections
The DAC5573 interfaces directly to standard mode, fast mode and high-speed mode I
2
C controllers. Any
microcontroller's I
2
C peripheral, including master-only and non-multiple-master I
2
C peripherals, work with the
DAC5573. The DAC5573 does not perform clock-stretching (i.e., it never pulls the clock line low), so it is not
necessary to provide for this unless other devices are on the same I
2
C bus.
Pullup resistors are necessary on both the SDA and SCL lines because I
2
C bus drivers are open-drain. The size
of the these resistors depend on the bus operating speed and capacitance on the bus lines. Higher-value
resistors consume less power, but increase the transition times on the bus, limiting the bus speed. Lower-value
resistors allow higher speed at the expense of higher power consumption. Long bus lines have higher
capacitance and require smaller pullup resistors to compensate. If the pullup resistors are too small the bus
drivers may not be able to pull the bus line low.
Most microcontrollers have programmable input/output pins that can be set in software to act as inputs or
outputs. If an I
2
C controller is not available, the DAC5573 can be connected to GPIO pins, and the I
2
C bus
protocol simulated, or bit-banged, in software. An example of this for a single DAC5573 is shown in Figure 39.
26

www.ti.com
8
6
4
9
5
7
1
2
3
12
14
11
10
13
16
15
DAC5573
V
OUTA
V
OUTB
V
REFH
V
DD
V
REFL
GND
V
OUTC
V
OUTD
A3
A2
A1
A0
IOV
DD
SDA
SCL
L
DAC
GPIO-2
GPIO-1
IOV
DD
Microcontroller or
Microprocessor
NOTE: DAC5573 power and input/output connections are omitted for clarity, except I
2
C Inputs.
USING REF02 AS A POWER SUPPLY FOR DAC5573
DAC5573
SLAS401 ≠ NOVEMBER 2003
APPLICATION INFORMATION (continued)
Figure 39. Using GPIO With a Single DAC5573
Bit-banging I
2
C with GPIO pins can be done by setting the GPIO line to zero and toggling it between input and
output modes to apply the proper bus states. To drive the line low, the pin is set to output a zero; to let the line
go high, the pin is set to input. When the pin is set to input, the state of the pin can be read; if another device is
pulling the line low, this reads as a zero in the port's input register.
Note that no pullup resistor is shown on the SCL line. In this simple case the resistor is not needed. The
microcontroller can simply leave the line on output, and set it to one or zero as appropriate. It can do this
because the DAC5573 never drives its clock line low. This technique can also be used with multiple devices, and
has the advantage of lower current consumption due to the absence of a resistive pullup.
If there are any devices on the bus that may drive their clock lines low, do not use the above method. The SCL
line must be high-Z or zero, and a pullup resistor must be provided as usual. Note also that this cannot be done
on the SDA line in any case, because the DAC5573 drives the SDA line low from time to time, as all I
2
C devices
do.
Some microcontrollers have selectable strong pullup circuits built in to their GPIO ports. In some cases, these
can be switched on and used in place of an external pullup resistor. Weak pullups are also provided on some
microcontrollers, but usually these are too weak for I
2
C communication. Test any circuit before committing it to
production.
Due to the extremely low supply current required by the DAC5573, a possible configuration is to use a REF02
+5-V precision voltage reference to supply the required voltage to the DAC5573 supply input as well as the
reference input, as shown in Figure 40. This is especially useful if the power supply is quite noisy or if the system
supply voltages are at some value other than 5 V. The REF02 outputs a steady supply voltage for the DAC5573.
If the REF02 is used, the current it needs to supply to the DAC5573 is 600 µA typical and 900 µA max for
27

www.ti.com
REF02
15 V
5 V
1.6 mA
V
DD
SCL
SDA
I
2
C
Interface
V
OUT
= 0 V to 5 V
DAC5573
LAYOUT
DAC5573
SLAS401 ≠ NOVEMBER 2003
APPLICATION INFORMATION (continued)
V
DD
= 5 V. When a DAC output is loaded, the REF02 also needs to supply the current to the load. The total
typical current required (with a 5-k
load on a single DAC output) is:
600 µA + (5 V / 5 k
) = 1.6 mA
The load regulation of the REF02 is typically 0.005%/mA, which results in an error of 400 µV for 1.6 mA of
current drawn from it. This corresponds to a 0.02 LSB error for a 0 V to 5 V output range.
Figure 40. REF02 Power Supply
A precision analog component requires careful layout, adequate bypassing, and clean, well-regulated power
supplies.
For best performance, the power applied to V
DD
must be well-regulated and low noise. Switching power supplies
and dc/dc converters often have high-frequency glitches or spikes riding on the output voltage. In addition, digital
components can create similar high-frequency spikes as their internal logic switches states. This noise can easily
couple into the DAC output voltage through various paths between the power connections and analog output.
As with the GND connection, V
DD
must be connected to a positive power-supply plane or trace that is separate
from the connection for digital logic until they are connected at the power-entry point. In addition, a 1-µF to 10-µF
capacitor in parallel with a 0.1-µF bypass capacitor is strongly recommended. In some situations, additional
bypassing may be required, such as a 100-µF electrolytic capacitor or even a Pi filter made up of inductors and
capacitors--all designed to essentially low-pass filter the ≠5-V supply, removing the high-frequency noise.
28

MECHANICAL DATA
MTSS001C ≠ JANUARY 1995 ≠ REVISED FEBRUARY 1999
POST OFFICE BOX 655303
∑
DALLAS, TEXAS 75265
PW (R-PDSO-G**)
PLASTIC SMALL-OUTLINE PACKAGE
14 PINS SHOWN
0,65
M
0,10
0,10
0,25
0,50
0,75
0,15 NOM
Gage Plane
28
9,80
9,60
24
7,90
7,70
20
16
6,60
6,40
4040064/F 01/97
0,30
6,60
6,20
8
0,19
4,30
4,50
7
0,15
14
A
1
1,20 MAX
14
5,10
4,90
8
3,10
2,90
A MAX
A MIN
DIM
PINS **
0,05
4,90
5,10
Seating Plane
0
∞
≠ 8
∞
NOTES: A. All linear dimensions are in millimeters.
B. This drawing is subject to change without notice.
C. Body dimensions do not include mold flash or protrusion not to exceed 0,15.
D. Falls within JEDEC MO-153
IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications,
enhancements, improvements, and other changes to its products and services at any time and to discontinue
any product or service without notice. Customers should obtain the latest relevant information before placing
orders and should verify that such information is current and complete. All products are sold subject to TI's terms
and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in
accordance with TI's standard warranty. Testing and other quality control techniques are used to the extent TI
deems necessary to support this warranty. Except where mandated by government requirements, testing of all
parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for
their products and applications using TI components. To minimize the risks associated with customer products
and applications, customers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right,
copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process
in which TI products or services are used. Information published by TI regarding third-party products or services
does not constitute a license from TI to use such products or services or a warranty or endorsement thereof.
Use of such information may require a license from a third party under the patents or other intellectual property
of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of information in TI data books or data sheets is permissible only if reproduction is without
alteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproduction
of this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable for
such altered documentation.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that
product or service voids all express and any implied warranties for the associated TI product or service and
is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Following are URLs where you can obtain information on other Texas Instruments products and application
solutions:
Products
Applications
Amplifiers
amplifier.ti.com
Audio
www.ti.com/audio
Data Converters
dataconverter.ti.com
Automotive
www.ti.com/automotive
DSP
dsp.ti.com
Broadband
www.ti.com/broadband
Interface
interface.ti.com
Digital Control
www.ti.com/digitalcontrol
Logic
logic.ti.com
Military
www.ti.com/military
Power Mgmt
power.ti.com
Optical Networking
www.ti.com/opticalnetwork
Microcontrollers
microcontroller.ti.com
Security
www.ti.com/security
Telephony
www.ti.com/telephony
Video & Imaging
www.ti.com/video
Wireless
www.ti.com/wireless
Mailing Address:
Texas Instruments
Post Office Box 655303 Dallas, Texas 75265
Copyright
2004, Texas Instruments Incorporated