
DESCRIPTION
The UC3620 is a brushless DC motor driver capable of decoding and
driving all 3 windings of a 3-phase brushless DC motor. In addition, an
on-board current comparator, oscillator, and high gain Op-Amp provide
all necessary circuitry for implementing a high performance, chopped
mode servo amplifier. Full protection, including thermal shutdown,
pulse-by-pulse current limiting, and under-voltage lockout aid in the
simple implementation of reliable designs. Both conducted and radiated
EMI have been greatly reduced by limiting the output dv/dt to 150V/
µ
s
for any load condition.
The UC1620SP is characterized for operation over the full military tem-
perature range of -55
∞
C to +125
∞
C, while the UC3620SP is charac-
terized for 0
∞
C to +70
∞
C.
FEATURES
∑
2A Continuous, 3A Peak Output
Current
∑
8V to 40V Operation
∑
Internal High Gain Amplifier for
Velocity Control Applications
∑
TTL Compatible Hall Inputs
∑
Mask Programmable Decode Logic
∑
Pulse-by-Pulse Current Limiting
∑
Internal Thermal Shutdown Protection
∑
Under-Voltage Lockout
∑
Available in SP Hermetic Package
BLOCK DIAGRAM
Switchmode Driver for 3-
Brushless DC Motors
UC1620
UC3620
3/97
1
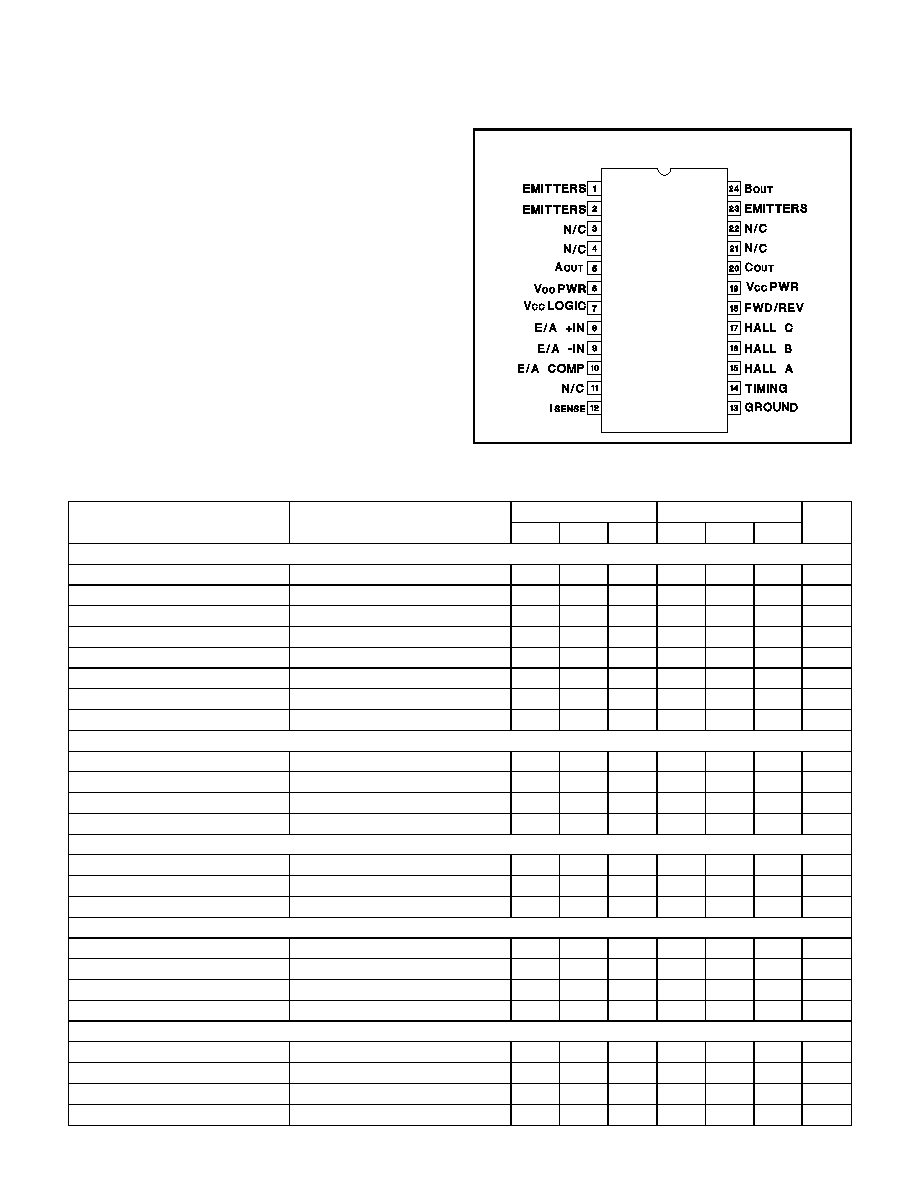
SP Hermetic Power DIL
CONNECTION DIAGRAMS
UC1620
UC3620
Supply Voltage, V
CC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40V
Output Current, Source or Sink
Non-Repetitive (t = 100
µ
sec), lo . . . . . . . . . . . . . . . . . . . . 3A
Repetitive (80% on - 20% off; t
ON
= 10ms) . . . . . . . . . . 2.5A
DC Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2A
Analog Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -0.3 to +Vcc
Logic Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -0.3 to +Vcc
Total Power Dissipation (at T
CASE
= 75∞ C)
for SP Package (Note 2). . . . . . . . . . . . . . . . . . . . . . . . . . 15W
Storage Temperature . . . . . . . . . . . . . . . . . . . . -65∞C to +150∞C
Operating Junction Temperature . . . . . . . . . . . -55∞C to +150∞C
Note 1: All voltages are with respect to ground. Currents are
positive into, negative out of the specified terminal.
Note 2: Consult Packaging Section of Databook for thermal
limitations and considerations of package.
ELECTRICAL CHARACTERISTICS:
PARAMETER
TEST CONDITIONS
UC3620
UC1620
UNIT
MIN
TYP
MAX
MIN
TYP
MAX
Error Amplifier Section
Input Offset Voltage
1.5
10
1.5
10
mV
Input Bias Current
-.25
-2.0
-.25
-2.0
µ
A
Input Offset Current
15
250
15
250
nA
Common Mode Range
Vcc = 8V to 40V
0
V
IN
-2
0
V
IN
-2
V
Open Loop Gain
V
COMP
= 1V to 4V
80
100
75
100
dB
Unity Gain Bandwidth
T
J
= 25∞C, Note 2
0.8
0.8
MHz
Output Sink Current
V
COMP
= 1V
2
2
mA
Output Source Current
V
COMP
= 4V
8
8
mA
Current Sense Section
Input Bias Current
-2.0
-5
-2.0
-5
µ
A
Internal Clamp
.425
0.5
.575
.405
0.5
.595
V
Divider Gain
.180
0.2
.220
.170
0.2
.230
V/V
Internal Offset Voltage
.8
1.0
1.2
.75
1.0
1.25
V
Timing Section
Output Off Time
18
20
22
17
20
23
µ
s
Upper Mono Threshold
5.0
5.0
V
Lower Mono Threshold
2.0
2.0
V
Decoder Section
High-Level Input Voltage
2.2
2.5
V
Low-Level Input Voltage
0.8
0.8
V
High-Level Input Current
10
10
µ
A
Low-Level Input Current
-10
-10
µ
A
Output Section
Output Leakage Current
V
CC
= 40V
500
1500
µ
A
VF1 Schottky Diode
I
O
= 2A
1.5
2.0
1.5
2.0
V
VF1 Substrate Diode
I
O
= 2A
2.2
3.0
2.2
3.0
V
Total Output Voltage Drop
I
O
= 2A, Note 3
3.0
3.6
3.0
3.6
V
Unless otherwise stated, these specifications apply for T
A
= 0∞C to 70∞C for 3620; T
A
= 55∞C to +125∞C for UC1620; V
CC
= 20V, R
T
= 20V, R
T
= 10k, C
T =
-2.2nF. T
A
=T
J.
ABSOLUTE MAXIMUM RATINGS
(Note 1)
2

ELECTRICAL CHARACTERISTICS:
PARAMETER
TEST CONDITIONS
UC3620
UC1620
UNIT
MIN
TYP
MAX
MIN
TYP
MAX
Output Section (cont.)
Output Rise Time
R
L
= 44
150
150
ns
Output Fall Time
R
L
= 44
150
150
ns
Under Voltage Lockout
Startup Threshold
8.0
8.0
V
Threshold Hysteresis
0.5
0.5
V
Thermal Shutdown
Junction Temperature
Note 2
150
180
150
180
∞
C
Total Standby Current
Supply Current
32
55
32
55
mA
Unless otherwise stated, these specifications apply for T
A
= 0∞C to 70∞C for 3620; T
A
= 55∞C to +125∞C for UC1620; V
CC
= 20V, R
T
= 20V, R
T
= 10k, C
T =
-2.2nF. T
A
=T
J.
UC1620
UC3620
Note 2: These parameters, although guaranteed over the recommended operating conditions, are not 100% tested in production.
Note 3: The total voltage drop is defined as the sum of both top and bottom side driver.
CIRCUIT DESCRIPTION
The UC3620 is designed for implementation of a com-
plete 3-
brushless DC servo drive using a minimum
number of external components. Below is a functional de-
scription of each major circuit feature.
DECODER
Table 1 shows the decoding scheme used in the UC3620
to decode and drive each of three high current totem pole
output stages. A forward/reverse signal, pin 13, is used to
provide direction. At any point in time, one driver is sour-
cing, one driver is sinking, and the remaining driver is off
or tri-stated. Pulse width modulation is accomplished by
turning the sink driver off during the monostable reset
time, producing a fixed off-time chop mode. Controlled
output rise and fall times help reduce electrical switching
noise while maintaining relatively small switching losses.
Hall lines require pull-up resistors.
CURRENT SENSING
Referring to Figure 1, emitter current is sensed across R
S
and fed back through a low pass filter to the current
sense pin 7. This filter is required to eliminate false trig-
gering of the monostable due to leading edge current
spikes. Actual filter values, although somewhat depend-
ent on external loads, will generally be in the 1k
and
1000pF range.
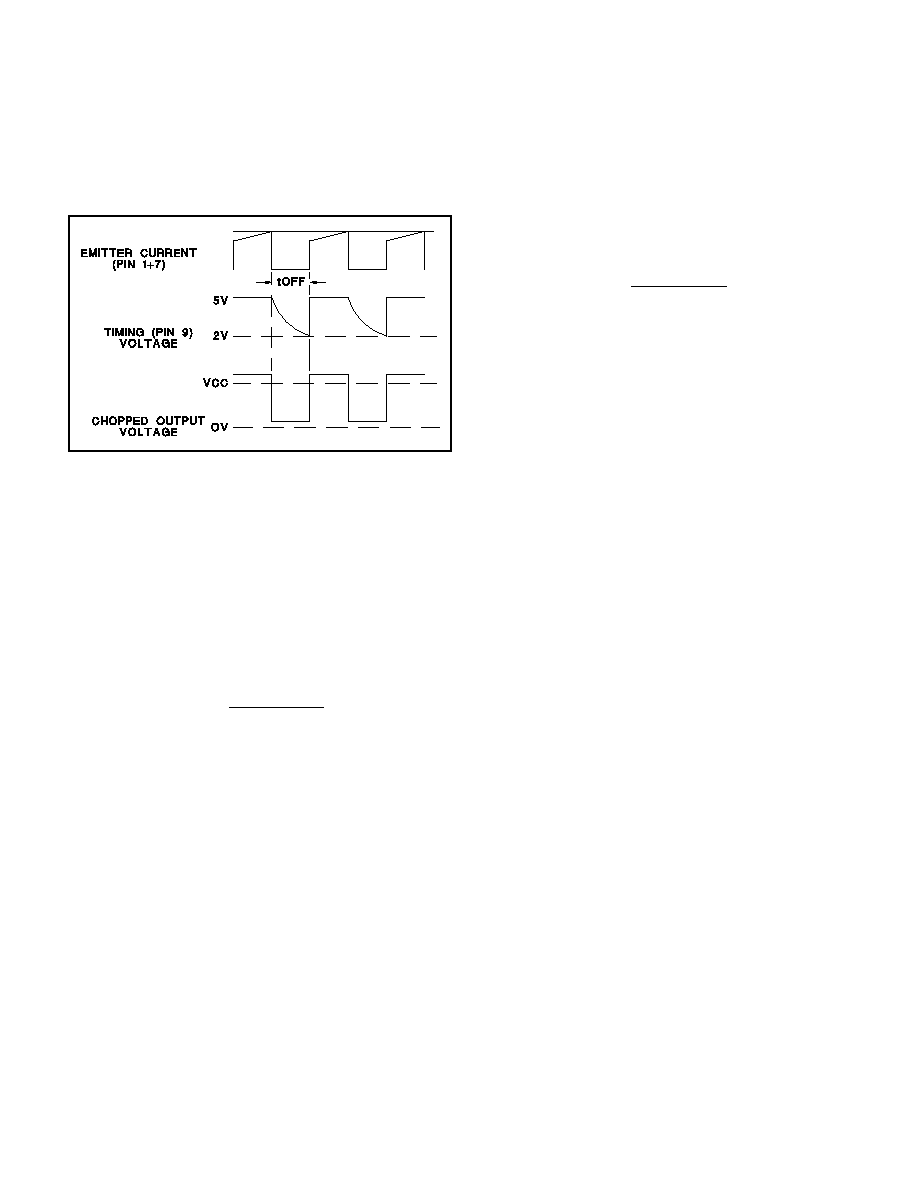
TIMING
An R-C time constant on pin 9 is used by the monostable
to generate a fixed off time at the outputs according to the
formula:
T
OFF
=
.916R
T
C
T
As the peak current in the emitters approaches the value
at the minus (-) input of the on-board comparator, the
monostable is triggered, causing the outputs to be turned
STEP
FWD/
REV
Ha
Hb
Hc
A
OUT
B
OUT
C
OUT
1
1
1
0
1
H
L
O
2
1
1
0
0
H
O
L
3
1
1
1
0
O
H
L
4
1
0
1
0
L
H
O
5
1
0
1
1
L
O
H
6
1
0
0
1
O
L
H
1
0
1
0
1
L
H
O
2
0
1
0
0
L
O
H
3
0
1
1
0
O
L
H
4
0
0
1
0
H
L
O
5
0
0
1
1
H
O
L
6
0
0
0
1
O
H
L
H = HIGH OUTPUT
L = LOW OUTPUT
O = OPEN OUTPUT
TABLE 1
Figure 1.
Current Sense Filter
3
UC1620
UC3620
off. On time is determined by the amount of time required
for motor current to increase to the value required to re-
trip the monostable. A timing sequence of these events is
shown in Figure 2.
CURRENT LIMIT
Since peak current is being controlled at all times by the
internal comparator, a simple voltage clamp at its nega-
tive (-) input will limit peak current to a maximum value. A
fixed 0.5V internal clamp has been included on the
UC3620, and any current spike in the output which gener-
ates a sensed voltage greater than 0.5V will immediately
shut down the outputs. Actual peak current values may be
programmed by selecting the appropriate value of R
S
ac-
cording to the formula:
R
S
=
0.5
I
CURRENTLIMIT
Since peak current is being controlled at all times by the
internal comparator, a simple voltage clamp at its nega-
tive (-) input will limit peak current to a maximum value. A
fixed 0.5V internal clamp has been included on the
UC3620, and any current spike in the output which gen-
erates a sensed voltage greater than 0.5V will immedi-
ately shut down the outputs. Actual peak current values
may be programmed by selecting the appropriate value of
R
S
according to the formula:
R
S
=
0.5
I
CURRENTLIMIT
ERROR AMPLIFIER LIMIT
A high performance, on-board error amplifier is included
to facilitate implementing closed loop motor control. Error
voltage generation and loop compensation are easily ac-
complished by appropriately configuring the gain and
feedback of this amplifier. To provide a larger dynamic sig-
nal range at the output of the error amplifier, a divide by 5
resistor network is used to reduce the error signal level
before applying to the internal comparator. In addition, a
one volt offset has been introduced at the output of the
error amplifier to guarantee control down to zero current
in the output stages. Since this offset is divided by the
open loop gain of the feedback loop, it has virtually no ef-
fect on closed loop performance.
PROTECTION FUNCTIONS
Protective functions including under-voltage lockout, peak
current limiting, and thermal shutdown, provide an ex-
tremely rugged device capable of surviving under many
types of fault conditions. Under-voltage lockout guaran-
tees the outputs will be off or tri-slated until V
CC
is suffi-
cient for proper operation of the chip. Current limiting
limits the peak current for a stalled or shorted motor,
whereas thermal shutdown will tri-state the outputs if a
temperature above 150∞C is reached.
Figure 2.
Chopped Mode Timing Diagram
CIRCUIT DESCRIPTION (cont.)
4

TYPICAL APPLICATIONS
UC1620
UC3620
3-
Brushless DC Open Loop Motor with Current Limit at 2A.
*Both V
CC
PWR and V
CC
LOGIC pins must be connected together when using the SP package.
3-
Brushless DC Open Loop Motor Drive
*Both V
CC
PWR and V
CC
LOGIC pins must be connected together when using the SP package.
5

UC1620
UC3620
Closed Loop Speed Control Servo
UNITRODE CORPORATION
7 CONTINENTAL BLVD.
∑
MERRIMACK, NH 03054
TEL. (603) 424-2410
∑
FAX (603) 424-3460
*Both V
CC
PWR and V
CC
LOGIC pins must be connected together when using the SP package.
6

IMPORTANT NOTICE
Texas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI's standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERTAIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE ("CRITICAL
APPLICATIONS"). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERSTOOD TO
BE FULLY AT THE CUSTOMER'S RISK.
In order to minimize risks associated with the customer's applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI's publication of information regarding any third
party's products or services does not constitute TI's approval, warranty or endorsement thereof.
Copyright
©
1999, Texas Instruments Incorporated